Embed Size (px)
Citation preview

Aprendizagem de máquina: Aprendizagem de máquina: visão geralvisão geral
Francisco Carvalho, Paulo Adeodato, Geber Ramalho e Jacques Robin
CIn-UFPE

Aprendizagem On-Line: Agente Aprendizagem On-Line: Agente AdaptativoAdaptativo
sensores
efetuadores
Agente
Gerador de problemas
crítico
elemento de aprendizagem
avaliação
objetivos de aprendizagem
elemento ator
trocas
conhecimento
a m
b i
e n
t e
Experiências informativasDepende do FRC
Padrões de aceitação
t
t + 1

Aprendizagem Off-Line: Acquisição Aprendizagem Off-Line: Acquisição de Conhecimento para Sistema de Conhecimento para Sistema
InteligenteInteligente
Agente
Base de conhecimento
elemento de aprendizagem
exemplos
Engenheiro de conhecimento
Escolhe e descreve
parametriza
elementoator
critica

Dimensões para classificar tarefas e Dimensões para classificar tarefas e técnicas de aprendizagem de máquinatécnicas de aprendizagem de máquina
Tarefas de aprendizagem: componente e aspeto do elemento de performance a melhorar
Complexidade do ambiente do agente aprendiz Retorno no processo de treinamento do agente Controle dos mecanismos de aprendizagem e de ação Formalismo de representação do conhecimento Aproveitamento de conhecimento prévio Visões unificadoras:
• aprendizagem = adquirir uma representação, geralmente aproximativa, de uma função matemática
• aprendizagem = busca de uma região em um espaço de hipótese explicando os dados (exemplos)
Relação com otimização, analise numérica, estatística Propriedades matemática e viés a priori sobre a função a
aproximar ou do espaço de hipótese a buscar

Técnicas de aprendizagemTécnicas de aprendizagem
Paradigma simbólico: Aprendizagem de conceitos Aprendizagem de conceitos
por busca no espaço de por busca no espaço de soluções (soluções (version-spaceversion-space))
Indução de árvores de Indução de árvores de decisão e regras decisão e regras proposicionaisproposicionais
Programação em lógica Programação em lógica indutivaindutiva
Aprendizagem por explicações
Raciocínio baseado em casos Aprendizagem Q Agrupamento de conceitos Agrupamento de conceitos
proposicionaisproposicionais
Paradigma probabilista: K Vizinhos mais próximo Regressão estatística Funções de bases radiais Aprendiz bayesiano ingênuoParadigma conexionista: Perceptron multicamada Memórias associativasParadima evolucionista: Algoritmos genéticosAbordagens híbridos: Rede bayesianasRede bayesianas

Tarefas de aprendizagemTarefas de aprendizagem Classificação: dados = instâncias conceitos
• aprende novo conhecimento da forma: CI: Estado(Ambiente,t) x Percepções(t) Estado(Ambiente,t+1)
Previsão: dados(t) conceitos dados(t+1)• aprende novo conhecimento da forma:
CP1: Estado(Ambiente,t) Estado(Ambiente,t+1) CP2: Estado(Ambiente,t) x Ações(t) Estado(Ambiente,t+1)
• classificação destacando atributo tempo• generaliza-se na identificação de serias temporais
Controle: dados política de comportamento• aprende novo conhecimento da forma:
R: Percepções Ações, ou Cu1: Estado(Ambiente,t) x Objetivos(t) Utilidade, ou Cu2: Estado(Ambiente,t) x Ações(t) x Objetivos(t) Utilidade

Tarefas de aprendizagem Tarefas de aprendizagem Otimização:
• aprender nova representação de conhecimento prévio• para melhorar desempenho do agente e não sua versatilidade• embora não envolve aprender nada de fundamentalmente novo• as vezes a diferença entre 2 representações do mesmo
problema• é a diferença entre uma solução puramente teórica e uma
solução operacional na prática Meta-aprendizagem
• aprender valores ótimas de parâmetros ou de representações de viés para aprendizagem de conhecimento do domínio da aplicação
Aprendizagem multi-camada: muitas vezes,• controle requer previsão, que requer classificação• e o conhecimento assim obtido precisa ser otimizado para
execução em tempo real• ex, futebol de robôs

Complexidade do ambienteComplexidade do ambiente
Acessível? Episódico? Discreto? Determinista? Ruidoso? Dinâmico? Relacional? Diverso? Grande?

Retorno no processo de treinamento Retorno no processo de treinamento
Aprendizagem supervisionada • certo(ação) ou errado(ação)
• Dado conjunto de exemplos pré-classificados,
• Aprender descrição que abstraí a informação contida nesses exemplos
• e que pode ser usada para prever casos futuros
• ex., concessão de crédito
Aprendizagem não-supervisionada• se vire!
• Dada uma coleção de dados não classificados,
• Agrupá-los por regularidades
• ex., caixa de supermercado empacotando

Retorno no processo de treinamento Retorno no processo de treinamento
Aprendizagem por reforço: recompensa/punição• certo(ação1(t0)/.../ação(tn) ou errado(ação1(t0)/.../ação(tn))• dado sucesso ou insucesso global de um seqüência de ação,
determinar qual ação e’ a mais desejável em cada situação• ex., DeepBlue jogando contra ele próprio: é por a• propagar para trás recompensas e punições a partir do
estado final

Controle da aprendizagemControle da aprendizagem
Aprende depois age ou aprende agindo (treinos x jogos)
Agir sempre otimamente x aprender novas habilidades Busca de hipótese:
• incremental (exemplos apresentado ao poucos) ou não (todos de uma vez)• iterativa (exemplos re-apresentados em várias épocas) ou não
(uma apresentação de cada exemplo basta)• top-down (refina hipótese geral para cobrir exemplos) ou bottom-up (generaliza exemplos para abstrair hipótese) ou bi-direcional• gulosa (generaliza exemplos assim que encontrados) ou
preguiçosa (não generaliza exemplos com antecedência, apenas os indexa para os adaptar ao receber novas consultas parecidas)
• global (aproxima função completa) ou local (aproxima-la por partes)

Representação do conhecimentoRepresentação do conhecimento Função matemática:
• domínio e escopo: {0,1}, Z, R• monotonia, continuidade• polinomial, exponencial, logarítmica
Lógica:• proposicional (ordem 0), de atributos (ordem 0+)• de Horn ou dos predicados (ordem 1)• exóticas (ordem superior, temporal, modal, etc)
Distribuição de probabilidades Outros, ex.:
• Pesos em redes conexionistas,• Representações orientada a objetos,• Árvores de decisão, etc...• se reduzem as 3 primeirasse reduzem as 3 primeiras

Conhecimento prévioConhecimento prévio
Aprendizagem sem conhecimento prévio:• dados (exemplos) conhecimento
Aprendizagem com conhecimento prévio:• dados x conhecimento prévio conhecimento aprendido
Métodos de aprendizagem que permitem usar conhecimento prévio em entrada:• re-aproveitam de conhecimento:
adquirido com especialistas humanos aprendido durante passos anteriores de KDD
• para aprendem a partir de muito menos dados• Homogeneidade:• Exemplos, conhecimento prévio e conhecimento aprendido
pode ser representados no mesmo formalismo?

ViésViés Conhecimento prévio:
• conhecimento do domínio da aplicação inteligente • ex, futebol de robôs, bolsa de valor, meteorologia, etc.• no mesmo formalismo do que o conhecimento a aprender
Viés: • meta-conhecimento prévio • sobre a forma do conhecimento a aprender a partir dos dados,
ex., classe de função a aproximar (linear, polinomial, ...) classe de função medindo o erro da aproximação (médio quadrado, …) dimensionalidade do espaço de hipótese distribuição probabilista dos pontos nesse espaço (normal, poisson, ..) restrições lexicais e sintática da linguagem de representação do
conhecimento a aprender (ex, número de premissa ou conclusões de regras, numero de grupos classificando exemplos, …)
Aprendizagem sem viés não temsem viés não tem poder de generalizaçãogeneralização !

Indução de árvore de decisão: Indução de árvore de decisão: característicascaracterísticas
Tarefas: classificação, previsão e controle
Ambiente:• inacessível: + • não episódico: +• contínuo: + ou -• ruidoso: + • dinâmico: + • relacional: -• diverso: -• grande: +
Supervisionado
Controle da aprendizagem:• Treino antes da ação• Não incremental• Não iterativo• Top-down• Guloso• Global
Representação do conhecimento: lógica propocisional
Não pode aproveitar de conhecimento prévio
Propriedades da função aproximada: escada N dimensional

Busca no espaço de versões: Busca no espaço de versões: característicascaracterísticas
Tarefas: classificação, previsão e controle
Ambiente:• inacessível: + • não episódico: + • contínuo: + ou - • ruidoso: + ou - • dinâmico: + ou - • relacional: -• diverso: -• grande: + ou -
Supervisionado
Controle da aprendizagem : • Treino antes da ação• Incremental• Não iterativo Bidirecional: top-down
e bottom-up• Guloso• Global
Representação do conhecimento: lógica proposicional
Não pode aproveitar de conhecimento prévio
Propriedades da função aproximada: escada N dimensional

NN vizinhos mais próximos vizinhos mais próximos
Algoritmo de TreinamentoPara cada exemplo <x, f(x)>, onde x=(x1,…,xp) é a sua descrição e f(x) é a sua classificação, adicionar o mesmo a lista treinamento
Algoritmo de ClassificaçãoDada uma instância xq a ser classificada
seja x1, …, xk, as k instancias da lista treinamento mais similares a xq
retorne faprox(xq) o valor mais comum de f entre as k instancias da lista treinamento mais similares a xq

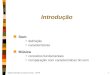
NN mais vizinhos próximos: mais vizinhos próximos: exemploexemplo
1 vizinho mais próximo classifica xq positivo, 5 vizinhos mais próximos classifica xq negativo
-
--
xq
+
+
++
-
-
-

N vizinhos mais próximos: característicasN vizinhos mais próximos: características
Tarefas: classificação, previsão, controle
Ambiente:• inacessível: +• não episódico: +• contínuo: +• ruidoso: +• dinâmico: +• relacional: -• diverso: -• grande: +
Supervisionado
Controle da aprendizagem: • Treino antes ou durante a ação• Incremental• Não iterativo• Preguiçoso• Local
Representação do conhecimento: pontos em espaço N dimensional
Não pode aproveitar de conhecimento prévio
Propriedades da função aproximada:
1 poliedro convexo ao redor de cada exemplo

Regressão localmente ponderadaRegressão localmente ponderada
Generalização do K vizinhos mais próximos Constrói uma aproximação explicita de uma função f em uma região próxima de xq
Aproximação linear, quadrática, exponencial, ... de f
Regressão linear: faprox = w0 + w1 y1(x) + … + wp yp(x)
Escolher os pesos wi que minimiza a soma dos quadrados dos erros em relação aos k vizinhos mais próximos de xq
q xde próximos mais k vizinhos aos x
2aproxq )x(f)x(f)x(E

Regressão localmente ponderada: Regressão localmente ponderada: característicascaracterísticas
Tarefas: classificação, previsão, controle
Ambiente:• inacessível: +• não episódico: +• contínuo: +• ruidoso: +• dinâmico: +• relacional: -• diverso: -• grande: +
Supervisionado Não pode aproveitar de
conhecimento prévio
Controle da aprendizagem:• Treino antes ou durante da ação• Incremental• Não iterativo• Preguiçoso• Local
Representação do conhecimento: pontos em espaço N dimensional
Propriedades da função aproximada:
• teoricamente qualquer função• já que forma da função é
parâmetro do método

Classificador bayesiano ingênuo: Classificador bayesiano ingênuo: teorema de Bayesteorema de Bayes
V1, ... Vn partição Y = i (YVi)
Então: P(Y) = i P(Y Vi )
= i P(Y |Vi ) P(Vi )
E então:
V1 V2
Vi VnY
i
j)P(Y/Vj)P(V
j)P(Y/Vj)P(V
P(Y)
j)P(Y/Vj)P(VP(Vj/Y)
P(Y)
j)P(Y/Vj)P(V
P(Y)
Y)P(VjP(Vj/Y)

Classificador bayesiano ingênuo: Classificador bayesiano ingênuo: idéiaidéia
Conjunto de treinamento = conjunto de pares <x, f(x)> onde• x = (x1, …, xp), com xi valore do atributo i de x
• f(x) V = {V1, ... , Vm)
Classificador de Bayes:• Aloca uma nova instância y = (y1, …, yp)
• o valor que maximamente verossímil vMAP
• vMAP = argmax P(vj / y1, …, yp)
vj V
= argmax P(y1, …, yp / vj) P(vj) (teorema de Bayes)
vj V
• P(y1, …, yp / vj) e P(vj) simplesmente freqüências na base exemplos
Hipótese ingênua de independência entre todos os atributos descritivos
P(a1, …, ap / vj) = i P(ai / vj)
VMAP = argmax P(y1, …, yp / vj) P(vj) = VVNB NB = argmax P(v= argmax P(vjj) ) ii P(ai / vP(ai / vjj))
vj V vvj j V V

Dia Tempo Temp. Humid.Dia Tempo Temp. Humid. Vento JogarVento JogarD1 Sol Quente Alta Fraco NãoD2 Sol Quente Alta Forte NãoD3 Coberto Quente Alta Fraco SimD4 Chuva Normal Alta Fraco SimD5 Chuva Frio Normal Fraco NãoD6 Chuva Frio Normal Forte NãoD7 Coberto Frio Normal Forte SimD8 Sol Normal Alta Fraco NãoD9 Sol Frio Normal Fraco SimD10 Chuva Normal Normal Fraco Sim
D11 Sol Frio Alta Forte ?
Classificador bayesiano ingênuo: Classificador bayesiano ingênuo: exemploexemplo
P(Sim) = 5/10 = 0.5 P(Não) = 5/10 = 0.5P(Sol/Sim) = 1/5 = 0.2 P(Sol/Não) = 3/5 = 0.6P(Frio/Sim) = 2/5 = 0.4 P(Frio/Não) = 2/5 = 0.4P(Alta/Sim) = 2/5 = 0.4 P(Alta/Não) = 3/5 = 0.6P(Forte/Sim) = 1/5 = 0.2 P(Forte/Não) = 2/5 = 0.4P(Sim)P(Sol/Sim) P(Frio/Sim) P(Alta/Sim) P(Forte/Sim) = 0.0032P(Não)P(Sol/Não)P(Frio/Não) P(Alta/Não) P(Forte/Não) = 0.0288 Jogar_Tenis(D11) = Não

Classificador bayesiano ingênuo: Classificador bayesiano ingênuo: característicascaracterísticas
Tarefas: classificação, previsão e controle
Ambiente:• inacessível: +• não episódico: +• contínuo: -• ruidoso: +• dinâmico: +• relacional: -• diverso: -• grande: +
Supervisionado Não pode aproveitar de
conhecimento prévio
Controle da aprendizagem:• Treino antes e durante a ação• Não incremental• Não iterativo• Preguiçoso• Global
Representação do conhecimento: • probabilidades condicionais entre
proposições representadas por pares atributo-valor
Propriedades da função a aproximar: distribuição de probabilidades univariada e discreta

Aquisição manual do conhecimento:
Aprendizagem indutivo:
Case-based reasoning (CBR)
Especialista Humano
Raciocínio Baseado em CasosRaciocínio Baseado em Casos
Regras
Exemplos Regras
Exemplos Exemplos parecidos

Raciocínio Baseado em CasosRaciocínio Baseado em Casos
Extensão de K vizinhos mais próximos:• descrições simbólicas x coordenadas em um espaço
euclidiano
• adaptação do resultado da função do exemplo cuja descrição é a mais próximo do novo caso a processar

novocaso(alvo)
casorecupe-
rado(fonte)
problema
baseReutilizar
Recuperar
Reter
Revisar
novocaso
(alvo)
soluçãosugerida
soluçãofinal
casosolução
casotestado
ecorrigido
casoaprendido
Indexar
CBR: recuperar, reutilizar, revisar, reterCBR: recuperar, reutilizar, revisar, reter

Raciocínio baseado em casos: Raciocínio baseado em casos: característicascaracterísticas
Tarefas: classificação, previsão, controle
Ambiente:• inacessível: +• não episódico: +• contínuo: +• ruidoso: +• dinâmico: -• relacional: -• diverso: -• grande: +
Supervisionado Não pode aproveitar de
conhecimento prévio
Controle da aprendizagem:• Treino durante da ação• Incremental• Não iterativo• Preguiçoso• Local
Representação do conhecimento:• medida de similaridade entres pares
de atributos-valores Propriedades da função aproximada:
• depende do método particular de indexação, recuperação e adaptação do exemplos
• potencialmente qualquer função

Paradigma Conexionista: Redes NeuraisParadigma Conexionista: Redes Neurais Definição
• Técnica inspirada no funcionamento do cérebro, onde neurônios artificiais, conectados em rede, são capazes de aprender e de generalizar.
• Técnica de aproximação de funções por regressão não linear.
Modelo de neurônio
e( i) w ji sjs(i) f (e(i))
wji
w1i
wni
s(i)
e(i)s1
sj
sn
degrau s
e
s
e
s
et
semi-linear sigmoide

Multilayer Perceptron (MLP) e Multilayer Perceptron (MLP) e BackpropagationBackpropagation
camadas intermediárias camada
de saída
camada de entrada
conexões

MLP: complexidade funcional em função MLP: complexidade funcional em função do número de camadasdo número de camadas

MLP: complexidade funcional em função MLP: complexidade funcional em função do número de neurôniodo número de neurônio
3 neurônios1 neurônio 5 neurônios
7 neurônios 9 neurônios 12 neurônios
Problemadas
2 espirais

Regiões de Decisão do MLPRegiões de Decisão do MLPAtivação Sigmóide x GaussianaAtivação Sigmóide x Gaussiana

Multi-Layer Perceptron (MLP) Exemplos: codificados na camada (nós) de entrada Classe, previsão ou ação: codificada na camada
(nós) de saída Algoritmo: parte de pesos aleatórios e
iterativamente• repetitivamente apresenta todos os exemplos• a cada iteração (época) ajuste pesos tal que:
• até algum critério de convergência chega a ser satisfeito
w ji( t 1) w ji(t) sj i- taxa de aprendizagem (si - di), errosj - saída do neurônio anterior j
Redes Neurais: Perceptrão Multi-Camada Redes Neurais: Perceptrão Multi-Camada com Retropropagação com Retropropagação

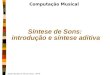
Exemplo de aplicação de MLP: Exemplo de aplicação de MLP: previsão de séries temporaisprevisão de séries temporais
MachineLearning
Desired Output
Training Step N
Bb
Bb
input window
Training Step N+1
Gm7 Cm7 F7
MachineLearning
Desired Output
Bm7
input window
Cm7 F7 Bb
Bm7

Perceptron Multi-Camada: característicasPerceptron Multi-Camada: características
Tarefas: classificação, previsão, controle
Ambiente:• inacessível: +• não episódico: +• contínuo: +• ruidoso: +• dinâmico: +• relacional: -• diverso: -• grande: + ou -
Supervisionado Não pode aproveitar
de conhecimento prévio
Controle da aprendizagem:• Treino antes da ação• Incremental ou não incremental• Iterativo• Guloso• Global
Representação do conhecimento: pesos das conexões na rede
Propriedades da função aproximada:
função arbitrária

Memórias associativas (Redes de Memórias associativas (Redes de Kohonen)Kohonen)
Agrupamento de padrões com características comuns• a rede identifica características comuns ao longo do
domínio dos padrões de entrada Mapa topográfico de características
• Quantização vetorial (compressão de dados)• Relações de vizinhança preservadas (transformações
conformes)• Representação de espaços N-Dimensionais em 2-D

Memórias associativasMemórias associativas
Entrada
Estado/Saída
Camada de saída = camada de estados = grade 2-D Camadas de entrada e saída totalmente conectadas
Processamento em 3 passos: 1. excitação vertical global2. seleção do neurônio mais excitado3. excitação horizontal local ao redor desse neurônio com função de chapéu mexicano

Memórias associativas: Memórias associativas: algoritmo de aprendizagemalgoritmo de aprendizagem
Inicializa a rede: • define pesos iniciais (podem ser aleatórios), raio da vizinhança,
taxa de aprendizagem e taxa de redução da vizinhança Apresenta todos os exemplos N vezes A cada iteração:
• para cada exemplo apresenta o exemplo na camada de entrada calcula a distância euclidiana do vetor dj de entrada a cada
neurônio j de saída seleciona o neurônio nj* de menor distância dj* atualiza os pesos do neurônio nj* e da sua vizinhança Nj*, segundo a
regra: wij (t+1) = wij (t) + (t)[xi (t)-wij (t)]
• reduz a vizinhança e a taxa de aprendizagem (convergência)

Memória associativas: exemploMemória associativas: exemplo
T=0 T=25
T=500T=10.000
T = iteração

Memórias associativas: característicasMemórias associativas: características
Tarefas: classificação, previsão?
Ambiente:• inacessível: + • não episódico: +• contínuo: +• ruidoso: +• dinâmico: +• relacional: -• diverso: -• grande: +
Não supervisionado Não pode aproveitar
conhecimento prévio
Controle da aprendizagem:• Treino antes da ação• Incremental• Iterativo• Preguiçoso?• Global?
Representação do conhecimento: pesos das conexões da redes
Propriedades da função aproximada: ?

Paradigma evolutivo: algoritmos Paradigma evolutivo: algoritmos genéticosgenéticos
EVOLUÇÃO • diversidade é gerada por cruzamento e mutações• os seres mais adaptados ao seus ambientes sobrevivem (seleção natural)• as características genéticas de tais seres são herdadas pelas próximas gerações
Algoritmos genéticos: Definição• Método probabilista de busca para resolução de problemas (otimização)
“inspirado” na teoria da evolução

Algoritmos Algoritmos genéticosgenéticos
Idéia: • indivíduo = solução • faz evoluir um conjunto de indivíduos mais adaptados por
cruzamento através de sucessivas gerações• fitness function f(i): R ->[0,1]
Aprendizagem• on-line, numeríca
Exemplo: ~compint\public_html\aulas-IAS\programas\ga\tsp2.exe

Aprendizagem evolucionária: Aprendizagem evolucionária: característicascaracterísticas
Tarefas: classificação, previsão, controle, meta-aprendizagem
Ambiente:• inacessível: + • não episódico: +• contínuo: +• ruidoso: +• dinâmico: -• relacional: + ou -• diverso: +• grande: +
Supervisionado Pode aproveitar de
conhecimento prévio (população inicial não aleatória)
Controle da aprendizagem:• Treino antes da ação• Incremental• Iterativo• Guloso• Global
Representação do conhecimento:• Algoritmo genético: população de
indivíduos, cada um representado por um bit string
• Programação genética: população de indivíduos, cada um representada pela árvore de instruções informática
Propriedades da função aproximada: função arbitrária?

: características: características
Tarefas: Ambiente:
• inacessível: • não episódico: • contínuo: • ruidoso: • dinâmico: • relacional: • diverso: • grande:
Supervisionado Conhecimento
prévio
Controle da aprendizagem:• Treino antes da ação?• Incremental?• Iterativo?• Top-down?• Guloso?• Global?
Representação do conhecimento: Propriedades da função aproximada:
escada N dimensional