Embed Size (px)
Citation preview
การวดระดบนาโดย Arduino
นายณฐพล ดวงศรทอง
นายระพพนธ ใจมา
นายศรณย เขยวเหลก
ปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร
มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557
การวดระดบนาโดย Arduino
นายณฐพล ดวงศรทอง นายระพพนธ ใจมา นายศรณย เขยวเหลก
ปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรวศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร
มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557
Measurement Water Level By Arduino
Mr. Nuttapon Druangsrithong
Mr. Rapeepun Jaima Mr. Sarun Khiawlek
This Project Report Submitted in Partial Fulfillment of the Requirement For the Degree of Bachelor of Engineering
Department of Electrical Engineering Faculty of Engineering
Rajamangala University of Technology Lanna 2014
ปรญญานพนธเรอง การวดระดบนาโดย Aduino ชอนกศกษา นายณฐพล ดวงศรทอง นายระพพนธ ใจมา นายศรณย เขยวเหลก อาจารยทปรกษา ผศ.นพนธ วงศทา หลกสตร วศวกรรมศาสตรบณฑต สาขาวชา วศวกรรมไฟฟา คณะ วศวกรรมศาสตร ปการศกษา 2557
คณะวศวกรรมศาสตรมหาวทยาลยเทคโนโลยราชมงคลลานนาอนมตใหปรญญานพนธนเปนสวนหนงของการศกษาตามหลกสตรปรญญาวศวกรรมศาสตรบณฑตสาขาวชาวศวกรรมไฟฟา
…………………………………………………..หวหนา สาขาวชา วศ.บ.วศวกรรมไฟฟา (นายสาคร ปนตา)
คณะกรรมการสอบปรญญานพนธ
…………………………………………….….ประธานกรรมการปรญญานพนธ (ผศ.นพนธ วงคทา)
…………………………………………………..กรรมการ (ผศ.ดร.วรตน นกกรองด)
…………………………………………………..กรรมการ (ผศ.ดร. วษณ ทองเลก)
ลขสทธของคณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคลลานนา
ง
ปรญญานพนธเรอง การวดระดบนาโดย Arduino ชอนกศกษา นายณฐพล ดวงศรทอง นายระพพนธ ใจมา
นายศรณย เขยวเหลก หลกสตร วศวกรรมไฟฟา สาขาวชา วศวกรรมไฟฟา คณะ วศวกรรมศาสตร อาจารยทปรกษา ผศ.นพนธ วงศทา ปการศกษา 2557
บทคดยอ
ปรญญานพนธนนาเสนอ การวดระดบนาโดยการใชบอรด Arduino Uno R3 ในการประมวลผลและใช Ultrasonic sensor ในการวดระยะหางระหวางผวนากบ Ultrasonic sensor สงคลนสญญาณกระทบกบนาแลวนากลบมาประมวลผลดวยบอรด Arduino สงให Relay ทางาน เพอใหปมนาทาการสบนาเขาถงเกบนา ผลการทดสอบพบวาการวดระดบนาโดยใช Ultrasonic sensor สามารถสงคลนสญญาณออกไปและรบเอาขอมลทไดมาสงใหบอรด Arduino ทาการประมวลผลวาปรมาณนาในถงเพยงพอตอการใชงานหรอไม เมอปรมาณนาลดลงตากวาคาตาสดทไดตงไวบอรด Arduino จะทาการสงให Relay ทางานและเมอระดบนาขนถงคาสงสดทตงไว Relay กจะตดการทางานของปมนา และแสดงผลปรมาณนาในถงผานทางจอ LCD ตามโปรแกรมทเขยนไว ทาใหสามารถวดระดบทมอยในถงเกบนาไดอยางมประสทธภาพ
จ
Thesis Title: Water Level Control by Arduino Author: Mr.Nuttapon Duangsrithong Mr.Rapeepun Jaima
Mr.Sarun Khaiwlek Degree: Bachelor of Engineering Program: Electrical Engineering Thesis Advisory: Asst. Prof.Nipon Wongtha Year: 2014
ABSTRACT This thesis presents the design of pump control to maintain the water level
the tank for dormitory,house by Aduino uno R3 applied float system. The water control system for building by Arduino uno R3 there will be a
water content in the tank,show time remaining in the pump to fill the tank and the rate of increase or decrease of the water on LCD screen. The results showed that the pump control systems to maintain the water level in the tank for dormitory and house can be treatment water in the tank to the desired level effectively.
ฉ
กตตกรรมประกาศ
ผจดท าโครงงานใครขอขอบพระคณอยางสงตอ ผศ.นพนธ วงศทา อาจารยทปรกษา
โครงงานซงเปนผใหแนวคด ค าแนะน า ความร ตลอดจนชแนะแนวทางในการท าโครงงานใหเปนอยาง
ด เปนผลใหโครงงานมความคบหนา และแกไขปญหาทเกดขนไดอยางตรงประเดน และในสวนของ
ระบบประปา การเดนทอน ารวมไปถงการประกอบถงน าเพอใชในการทดลอง ผจดท าใคร
ขอขอบพระคณไปยงรานตปลา ทชวยแนะน าและชวยเหลอในเรองของถงพกน า ทใชในการทดลอง
ขอขอบพระคณบคลากร เจาหนาทประจ าภาควชาวศวกรรมไฟฟาทกทาน ทอ านวยความสะดวกใน
การปฏบตงาน ขอขอบพระคณภาควชาวศวกรรมไฟฟาทไดเออเฟออ านวยสถานทส าหรบการท า
โครงงาน ขอขอบคณหองคมภรทเปนแหลงหนงสอและขอมลตางๆ ส าหรบโครงงานคณคาและ
ประโยชนใด ๆ ทอาจมจากโครงงานน ผจดท าโครงงานขอขอบพระคณบดามารดาทใหก าเนดและ
เลยงดใหการศกษาเปนอยางดตลอดมา
คณะผจดท า
นาย ณฐพล ดวงศรทอง
นาย ระพพนธ ใจมา
นาย ศรณย เขยวเหลก

ฉ
ช
สารบญ
หนา
บทคดยอภาษาไทย ง
บทคดยอภาษาองกฤษ จ
กตตกรรมประกาศ ฉ
สารบญ ช
สารบญรปภาพ ฌ
สารบญตาราง ฎ
บทท 1 บทน า
1.1 ทมาและความส าคญของโครงงาน 1
1.2 วตถประสงคของโครงงาน 1
1.3 ขอบเขตของโครงงาน 1
1.4 ขนตอนการด าเนนงาน 1
1.5 ประโยชนทจะไดรบ 2
บทท 2 ทฤษฎทเกยวของ
2.1 บอรด Arduino Uno R3 3
2.2 รเลย (Relay) 3
2.2.1 สวนประกอบภายใน Relay 6
2.3 สวตชงเพาเวอรซพพลาย 8
2.3.1 สวนประกอบของสวตชงเพาเวอรซพพลาย 9
2.4 อลตราโซนคเซนเซอร 10
2.4.1 จดตอใชงานของ SR04 11
2.5 เครองสบน า 11
2.5.1 ประเภทของเครองสบน า 12
- แยกตามลกษณะการเพมพลงงานใหแกของเหลว 12
สารบญ (ตอ)
หนา
- แยกตามลกษณะการขบดนของเหลวในปม 12
2.5.2 พลงงานของปม 16
บทท 3 ขนตอนการด าเนนโครงงาน
3.1. ระบบทอสบน าเขาถง 19
3.2. ระบบการระบายน า 20
3.3. ระบบวางเครองสบน า 20
3.4. ระบบตรวจวดระดบน า 20
3.5. วงจรเปดปดเครองสบน า 21
3.6. ออกแบบการท างานของวงจร 23
บทท 4 ผลการด าเนนการ
4.1 การสรางระบบสบน าเขาถงพกน าเพอใชในการทดลอง 25
4.2 การทดลองระบบควบคมเครองสบน า 26
บทท 5 สรปผลโครงงานและขอเสนอแนะ
5.1. สรปผลของโครงงาน 31
5.1.1 ระบบสบน าเขาถงพกน า 31
5.1.2. โปรแกรมควบคมเครองสบน า 31
5.2 อปสรรคในการทดลอง 31
5.3 ขอเสนอแนะ 31
เอกสารอางอง 32
ภาคผนวก ก อปกรณทใชในการทดลอง 33
ภาคผนวก ข Arduino Uno R3 37
ประวตผเขยน 42
ฌ
สารบญรป
หนา
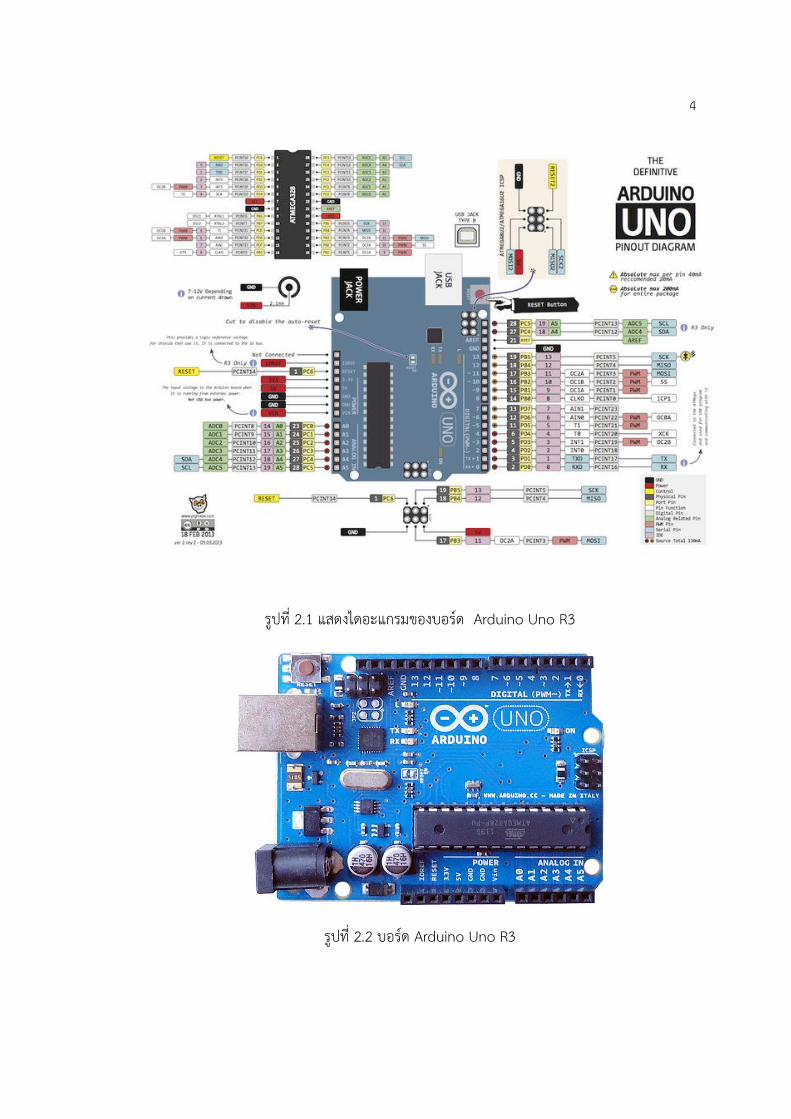
รปท 2.1 แสดงไดอะแกรมของบอรด Arduino Uno R3 4
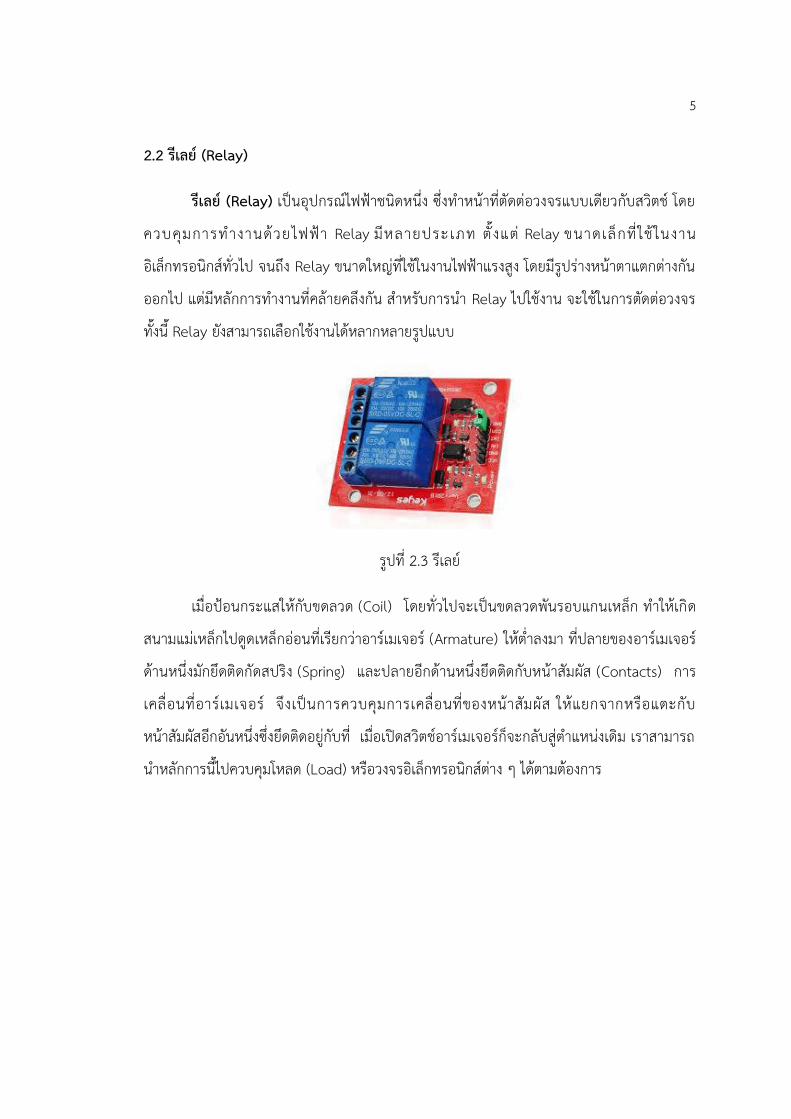
รปท 2.2 บอรด Arduino Uno R3 4
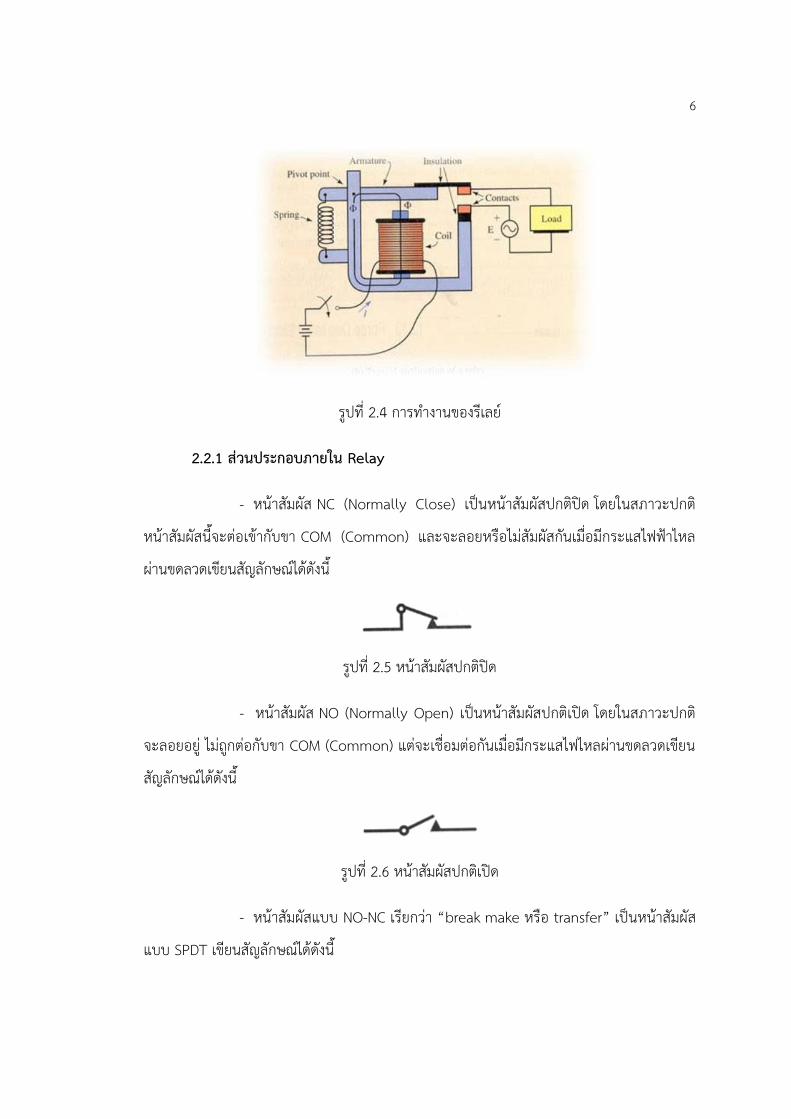
รปท 2.3 รเลย 5
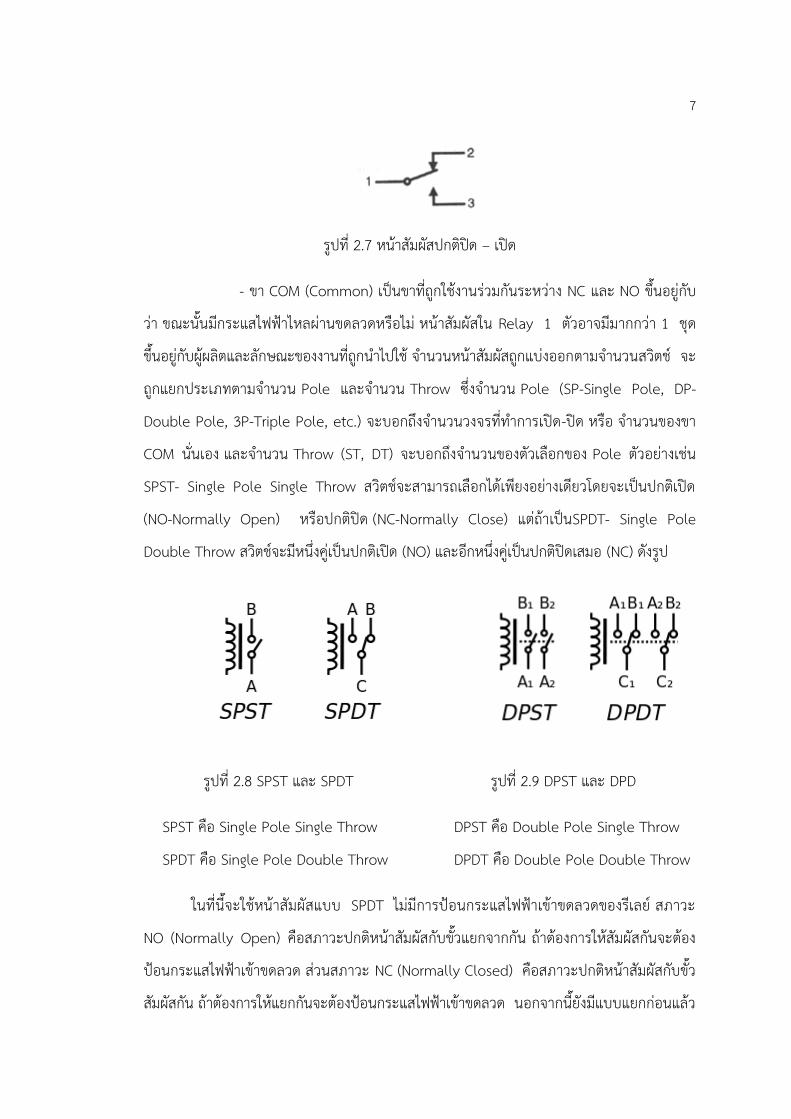
รปท 2.4 การท างานของรเลย 6
รปท 2.5 หนาสมผสปกตปด 6
รปท 2.6 หนาสมผสปกตเปด 6
รปท 2.7 หนาสมผสปกตปด – เปด 7
รปท 2.8 SPST และ SPDT 7
รปท 2.9 DPST และ DPD 7
รปท 2.10 โครงสรางรเลย SPDT 8
รปท 2.11 (Switching Power Supply) 9
รปท 2.12 อลตราโซนคเซนเซอรเบอร SR04 11
รปท 2.13 ลกษณะการท างานของปมลกสบ 13
รปท 2.14 ปมโรตารชนดปมเฟอง และ ปมแบบแผนกวาด 14
รปท 2.15 ลกษณะการท างานของ Centifugal Pump 14
รปท 2.16 ปมแบบไหลตามแกน Axial Flow Pump 15
รปท 2.17 ปมแบบผสม Mixed Flow Pump 15
รปท 2.18 การจ าแนกประเภทของปม 16
รปท 3.1 แสดงระบบตรวจวดระดบน าในถงพกน า 20
รปท 3.2 ระดบน าเทากบหรอนอยกวาระดบน าต าสดทก าหนดไว 21
รปท 3.3 ระดบน าอยระหวางระดบต าสดและระดบสงสดทก าหนดไว 22 รปท 3.4 ระดบน าเทากบหรอมากกวาระดบน าสงสดทก าหนดไว 22 รปท 3.5 แสดงการท างาน 23 รปท 4.1 ระบบควบคมน าอตโนมตโดย Arduino 25 รปท 4.2 หนาจอแสดงผลคาทงในระบบ 26
สารบญรป (ตอ) หนา
รปท 4.3 กลองควบคมและแสดงผล 26
รปท 4.4 การแสดงผลคาระดบน าต าสด (Min) บนหนาจอ LCD 27
รปท 4.5 การปลอยน าออกจากถงเกบน า 27
รปท 4.6 การแสดงผลคาระดบน าต าสด (Max) บนหนาจอ LCD 27
รปท 4.7 รปการสบน าขนถงเกบน าทระดบสงสด (Max) 28
รปท 4.8 แสดงผลการตงคาระดบ Max และ Min 28
รปท 4.9 แสดงคาระดบน าต าสด (Min) ทตงไว 29
รปท 4.10 แสดงการปลอยน า 29
รปท 4.11 แสดงระดบน าเมอถงระดบ (Max) ทตงคาไว 30
รปท 4.12 แสดงระดบน าในถง 30
ฎ
สารบญตาราง
หนา
ตารางท 1.1 แสดงคณสมบตของ Arduino UNO R3 3
บทท 1
บทน า
1.1 ทมาและความส าคญของโครงงาน
อาคารบานเรอนทมถงพกนาสารองนา หากมทอแตกรว หรอมการซอมทอหรออบตเหตอนๆ
ทาใหนาประปาไมไหล จะไดมนาใชตลอดเวลา การสบนาเขาถงพกนาน ใชระบบลกลอย เปน
เครองมอวดระดบนาและควบคมเครองสบนาซงกพบปญหานาลนหรอนาในถงสารองไมพอใช อน
เนองมาจากลกลอยเสอมประสทธภาพอกทงผใชไมสามารถรระดบนา
การใชระบบ Arduino uno R3 เพอควบคมระดบนาในถงพกนาจะทาใหระบบควบคมม
ความสามารถทหลากหลายกวาระบบลกลอย ไมวาจะเปนความสามารถในการควบคมระดบนาใหอย
ในปรมาณทพอใชในอาคาร หอพก บานเรอน ฯลฯ บอกระดบในถงพกนาได อายการใชงานยาวนาน
กวา มความถกตองแมนยาสง และงายตอการซอมบารงแกไข
1.2 วตถประสงคของโครงงาน
การใชระบบ Arduino uno R3 เพอควบคมระดบนาในถงพกนามวตถประสงคดงน
1. เพอรกษาปรมาณนาในถงพกนาใหมปรมาณทเพยงพอตอความตองการใชงาน
2. สามารถบอกปรมาณนาในถงพกนาได
1.3 ขอบเขตของโครงงาน
ตองการใชระบบ Microcontroller ควบคมปรมาณนาในถงพกนาวดระดบนาในถงพกนา
โดยใชอลตราโซนคเซนเซอรเปนตววดระยะหางระหวางผวนากบขอบบนของถงพกนา
1.4 ขนตอนการด าเนนงาน
1.สบคนหาขอมล และศกษาการทางานของระบบ Arduino uno R3 และระบบ sensors ตางๆทใชในระบบควบคม
2.ออกแบบหล กการท างานของระบบควบคมปรมาณน าออกแบบแผงควบคม Microcontroller และ ออกแบบการตดตงแผงควบคมกบถงพกนา
2
3.เขยนโปรแกรมชดคาสงเพอใชในระบบควบคมปรมาณนาในถงพกนา
4.จดซออปกรณทใชในการสรางระบบควบคมปรมาณนาในถงพกนา
5.สรางระบบควบคมนาในถงพกนา
6.ทดลองระบบควบคมนาในถงพกนา โดยการสรางสถานการณจาลอง
7.วเคราะหและทาการแกปญหาทพบจากการทดลองในสถานการณจาลอง
8.ทดลองระบบควบคมนาในถงพกนาโดยการสรางสถานการณจรง
9.สรปผลการทาโครงการระบบควบคมเครองสบนาเพอรกษาปรมาณนาในถงพกนาสาหรบอาคาร
1.5 ประโยชนทจะไดรบ
ระบบควบคมเครองสบนาเพอรกษาปรมาณนาในถงพกนาโดย Microcontroller สามารถ
ควบคมเครองสบนาเพอรกษาปรมาณนาในถงพกนาวดปรมาณนาในถงพกนา
บทท 2
ทฤษฎทเกยวของ
2.1 บอรด Arduino Uno R3
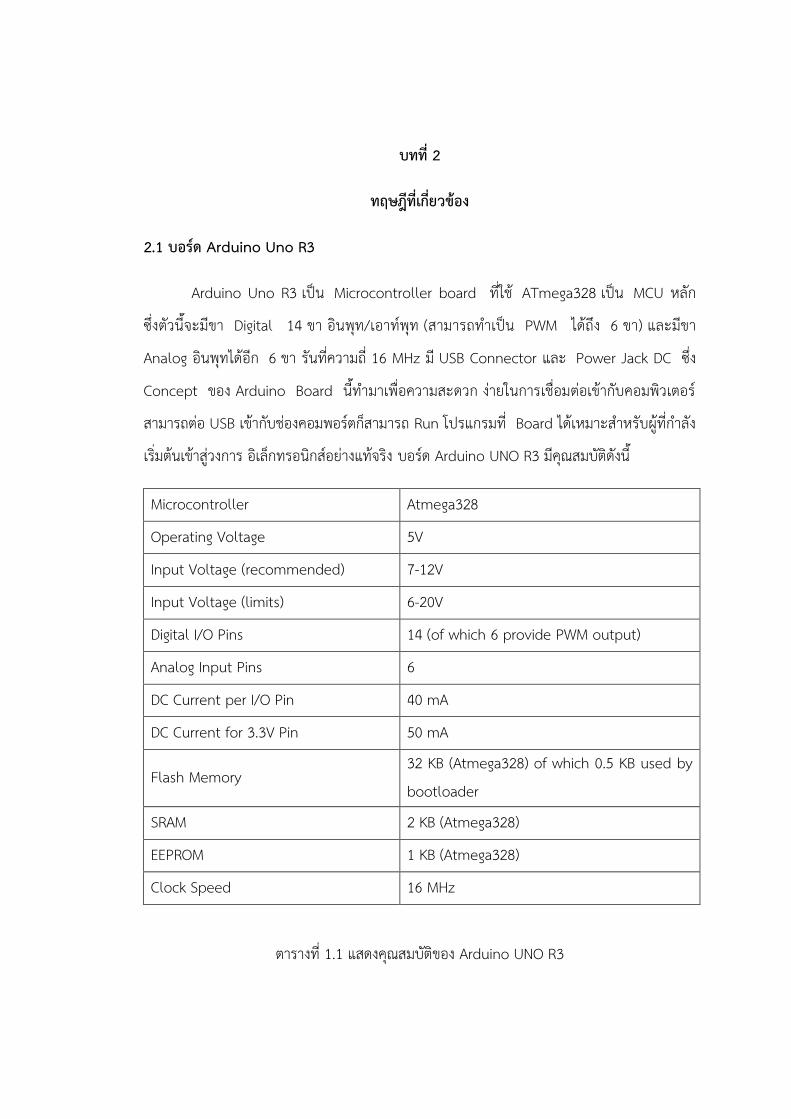
Arduino Uno R3 เปน Microcontroller board ทใช ATmega328 เปน MCU หลก
ซงตวนจะมขา Digital 14 ขา อนพท/เอาทพท (สามารถท าเปน PWM ไดถง 6 ขา) และมขา
Analog อนพทไดอก 6 ขา รนทความถ 16 MHz ม USB Connector และ Power Jack DC ซง
Concept ของ Arduino Board นท ามาเพอความสะดวก งายในการเชอมตอเขากบคอมพวเตอร
สามารถตอ USB เขากบชองคอมพอรตกสามารถ Run โปรแกรมท Board ไดเหมาะส าหรบผทก าลง
เรมตนเขาสวงการ อเลกทรอนกสอยางแทจรง บอรด Arduino UNO R3 มคณสมบตดงน
Microcontroller Atmega328
Operating Voltage 5V
Input Voltage (recommended) 7-12V
Input Voltage (limits) 6-20V
Digital I/O Pins 14 (of which 6 provide PWM output)
Analog Input Pins 6
DC Current per I/O Pin 40 mA
DC Current for 3.3V Pin 50 mA
Flash Memory 32 KB (Atmega328) of which 0.5 KB used by bootloader
SRAM 2 KB (Atmega328)
EEPROM 1 KB (Atmega328)
Clock Speed 16 MHz
ตารางท 1.1 แสดงคณสมบตของ Arduino UNO R3
4
รปท 2.1 แสดงไดอะแกรมของบอรด Arduino Uno R3
รปท 2.2 บอรด Arduino Uno R3
5
2.2 รเลย (Relay)
รเลย (Relay) เปนอปกรณไฟฟาชนดหนง ซงท าหนาทตดตอวงจรแบบเดยวกบสวตช โดย
ควบคมการท างานดวย ไฟฟา Relay มหลายประเภท ต งแต Relay ขนาดเลกท ใช ในงาน
อเลกทรอนกสทวไป จนถง Relay ขนาดใหญทใชในงานไฟฟาแรงสง โดยมรปรางหนาตาแตกตางกน
ออกไป แตมหลกการท างานทคลายคลงกน ส าหรบการน า Relay ไปใชงาน จะใชในการตดตอวงจร
ทงน Relay ยงสามารถเลอกใชงานไดหลากหลายรปแบบ
รปท 2.3 รเลย
เมอปอนกระแสใหกบขดลวด (Coil) โดยทวไปจะเปนขดลวดพนรอบแกนเหลก ท าใหเกด
สนามแมเหลกไปดดเหลกออนทเรยกวาอารเมเจอร (Armature) ใหต าลงมา ทปลายของอารเมเจอร
ดานหนงมกยดตดกดสปรง (Spring) และปลายอกดานหนงยดตดกบหนาสมผส (Contacts) การ
เคลอนทอารเมเจอร จงเปนการควบคมการเคลอนทของหนาสมผส ใหแยกจากหรอแตะกบ
หนาสมผสอกอนหนงซงยดตดอยกบท เมอเปดสวตชอารเมเจอรกจะกลบสต าแหนงเดม เราสามารถ
น าหลกการนไปควบคมโหลด (Load) หรอวงจรอเลกทรอนกสตาง ๆ ไดตามตองการ
6
รปท 2.4 การท างานของรเลย
2.2.1 สวนประกอบภายใน Relay
- หนาสมผส NC (Normally Close) เปนหนาสมผสปกตปด โดยในสภาวะปกต
หนาสมผสนจะตอเขากบขา COM (Common) และจะลอยหรอไมสมผสกนเมอมกระแสไฟฟาไหล
ผานขดลวดเขยนสญลกษณไดดงน
รปท 2.5 หนาสมผสปกตปด
- หนาสมผส NO (Normally Open) เปนหนาสมผสปกตเปด โดยในสภาวะปกต
จะลอยอย ไมถกตอกบขา COM (Common) แตจะเชอมตอกนเมอมกระแสไฟไหลผานขดลวดเขยน
สญลกษณไดดงน
รปท 2.6 หนาสมผสปกตเปด
- หนาสมผสแบบ NO-NC เรยกวา “break make หรอ transfer” เปนหนาสมผส
แบบ SPDT เขยนสญลกษณไดดงน
7
รปท 2.7 หนาสมผสปกตปด – เปด
- ขา COM (Common) เปนขาทถกใชงานรวมกนระหวาง NC และ NO ขนอยกบ
วา ขณะนนมกระแสไฟฟาไหลผานขดลวดหรอไม หนาสมผสใน Relay 1 ตวอาจมมากกวา 1 ชด
ขนอยกบผผลตและลกษณะของงานทถกน าไปใช จ านวนหนาสมผสถกแบงออกตามจ านวนสวตช จะ
ถกแยกประเภทตามจ านวน Pole และจ านวน Throw ซงจ านวน Pole (SP-Single Pole, DP-
Double Pole, 3P-Triple Pole, etc.) จะบอกถงจ านวนวงจรทท าการเปด-ปด หรอ จ านวนของขา
COM นนเอง และจ านวน Throw (ST, DT) จะบอกถงจ านวนของตวเลอกของ Pole ตวอยางเชน
SPST- Single Pole Single Throw สวตชจะสามารถเลอกไดเพยงอยางเดยวโดยจะเปนปกตเปด
(NO-Normally Open) หรอปกตปด (NC-Normally Close) แตถาเปนSPDT- Single Pole
Double Throw สวตชจะมหนงคเปนปกตเปด (NO) และอกหนงคเปนปกตปดเสมอ (NC) ดงรป
รปท 2.8 SPST และ SPDT รปท 2.9 DPST และ DPD
SPST คอ Single Pole Single Throw DPST คอ Double Pole Single Throw
SPDT คอ Single Pole Double Throw DPDT คอ Double Pole Double Throw
ในทนจะใชหนาสมผสแบบ SPDT ไมมการปอนกระแสไฟฟาเขาขดลวดของรเลย สภาวะ
NO (Normally Open) คอสภาวะปกตหนาสมผสกบขวแยกจากกน ถาตองการใหสมผสกนจะตอง
ปอนกระแสไฟฟาเขาขดลวด สวนสภาวะ NC (Normally Closed) คอสภาวะปกตหนาสมผสกบขว
สมผสกน ถาตองการใหแยกกนจะตองปอนกระแสไฟฟาเขาขดลวด นอกจากนยงมแบบแยกกอนแลว
8
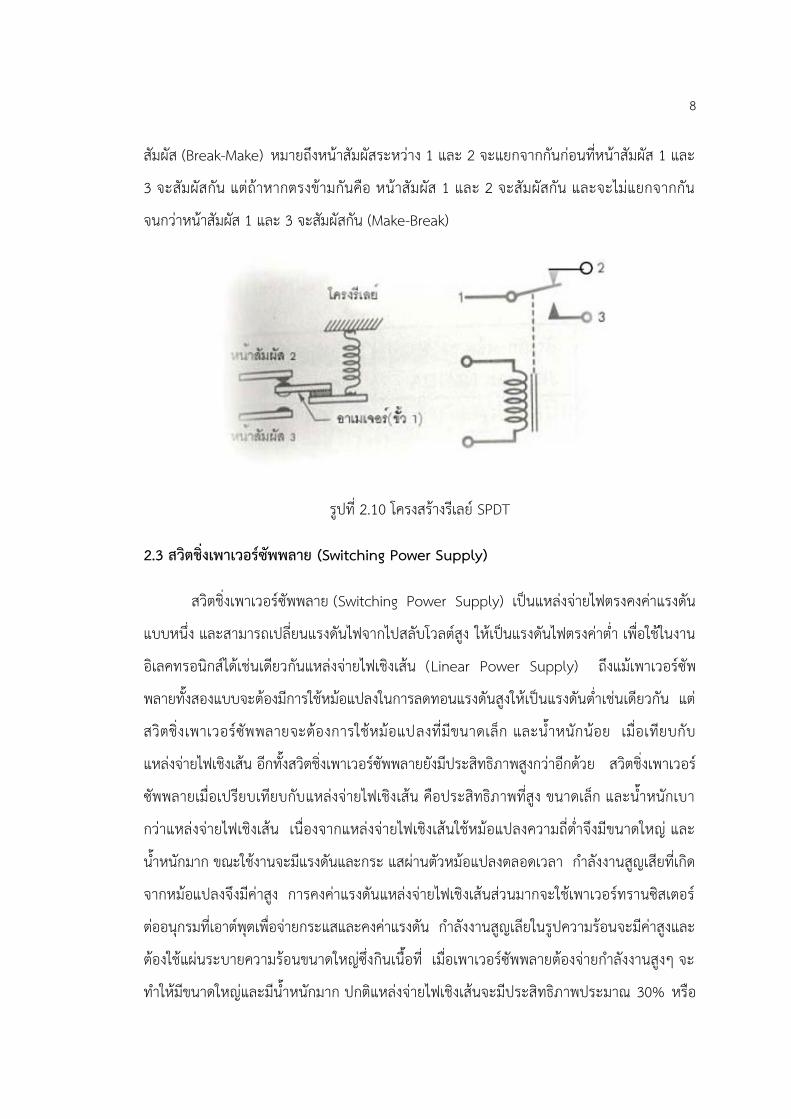
สมผส (Break-Make) หมายถงหนาสมผสระหวาง 1 และ 2 จะแยกจากกนกอนทหนาสมผส 1 และ
3 จะสมผสกน แตถาหากตรงขามกนคอ หนาสมผส 1 และ 2 จะสมผสกน และจะไมแยกจากกน
จนกวาหนาสมผส 1 และ 3 จะสมผสกน (Make-Break)
รปท 2.10 โครงสรางรเลย SPDT
2.3 สวตชงเพาเวอรซพพลาย (Switching Power Supply)
สวตชงเพาเวอรซพพลาย (Switching Power Supply) เปนแหลงจายไฟตรงคงคาแรงดน
แบบหนง และสามารถเปลยนแรงดนไฟจากไปสลบโวลตสง ใหเปนแรงดนไฟตรงคาต า เพอใชในงาน
อเลคทรอนกสไดเชนเดยวกนแหลงจายไฟเชงเสน (Linear Power Supply) ถงแมเพาเวอรซพ
พลายทงสองแบบจะตองมการใชหมอแปลงในการลดทอนแรงดนสงใหเปนแรงดนต าเชนเดยวกน แต
สวตชงเพาเวอรซพพลายจะตองการใชหมอแปลงทมขนาดเลก และน าหนกนอย เมอเทยบกบ
แหลงจายไฟเชงเสน อกทงสวตชงเพาเวอรซพพลายยงมประสทธภาพสงกวาอกดวย สวตชงเพาเวอร
ซพพลายเมอเปรยบเทยบกบแหลงจายไฟเชงเสน คอประสทธภาพทสง ขนาดเลก และน าหนกเบา
กวาแหลงจายไฟเชงเสน เนองจากแหลงจายไฟเชงเสนใชหมอแปลงความถต าจงมขนาดใหญ และ
น าหนกมาก ขณะใชงานจะมแรงดนและกระ แสผานตวหมอแปลงตลอดเวลา ก าลงงานสญเสยทเกด
จากหมอแปลงจงมคาสง การคงคาแรงดนแหลงจายไฟเชงเสนสวนมากจะใชเพาเวอรทรานซสเตอร
ตออนกรมทเอาตพตเพอจายกระแสและคงคาแรงดน ก าลงงานสญเลยในรปความรอนจะมคาสงและ
ตองใชแผนระบายความรอนขนาดใหญซงกนเนอท เมอเพาเวอรซพพลายตองจายก าลงงานสงๆ จะ
ท าใหมขนาดใหญและมน าหนกมาก ปกตแหลงจายไฟเชงเสนจะมประสทธภาพประมาณ 30% หรอ
9
อาจท าไดสงถง 50% ในบางกรณ ซงนบไดวาคอนขางต าเมอเปรยบเทยบกบสวตชงเพาเวอรซพ
พลายซงมประสทธภาพในชวง 65%-80% สวตชงเพาเวอรซพพลายมชวงเวลาโคลสตอพประมาณ
20x10-3 ถง 50x10-3 วนาท ในขณะทแหลงจายไฟเชงเสนจะท าไดเพยงประมาณ 2x10-3 วนาท
ซงมผลตอการจดหาแหลงจายไฟส ารองเพอปองกนการหยดท างานของอปกรณทใชกบเพาเวอรซพ
พลาย เมอเกดการหยดจายแรงดนไฟสลบ รวมทงสวตชงเพาเวอรซพพลายสามารถท างานไดในชวง
แรงดนอนพตคอนขางกวาง จงยงคงสามารถท างานไดเมอเกดกรณแรงดนไฟตกอกดวย
รปท 2.11 (Switching Power Supply)
2.3.1 สวนประกอบของสวตชงเพาเวอรซพพลาย
1.ตวกลอง ตวกลองจะท าดวยโลหะยดตดกนดวยสกร มรปรางและขนาดตางกนไป
มหนาทปกปดสวนประกอบภายในทอนตรายตอการจบตอง และปองกนสญญาณความถสงออกมา
รบกวนภายนอก
2.สวทซเปด/ปด ใช เปด/ปด การท างานของเพาเวอรซพพลาย
3.สวทซเลอกแรงดน ใชเลอกแรงดนทจะตอเขากบเพาเวอรซพพลาย วาเปน 220
หรอ 110 โวลต ซงจะตองเลอกใหถกตองตรงกบการใชงาน ถาเลอกผดอาจจะท าใหเกดการชอรต
หรอระเบดได
4.วงจรแปลงไฟ เปนอปกรณอเลกทรอนกสเปนจ านวนมาก ท าหนาทแปลงไฟและ
รองรบการท างานอนๆของเพาเวอรซพพลาย
5.พดลม ท าหนาทระบายความรอนจากการใชงาน
10
6.ฟวส(Fuse) ท าหนาทปองกนอนตรายจากการใชไฟเกนขนาด ซงมกจะเกดจาก
ความเสยหายภายในตวเพาเวอรซพพลายเอง เพราะสวนใหญแลวเพาเวอรซพพลายจะมระบบปองกน
การจายไฟเกนอยแลว โดยทหากมการจายกระแสมากเกดก าหนดกจะตดไฟไมใหจายออกมาท าใหลด
ความเสยหายลงได แตถาเกดการชอรตภายในตวเพาเวอรซพพลายเองกจะตองอาศยฟวสเปนตว
ปองกน
2.4 อลตราโซนคเซนเซอร
หลกการท างานของเซนเซอรชนดน คอ ใชคลนเสยงในการตรวจจบ โดยเซนเซอรจะท าการ
สรางคลนเสยงสงออกไป เมอคลนตกกระทบวตถ วตถจะท าการสะทอนคลนเสยงกลบมา จากนน
วงจรภายในจะท าการประมวลผลเวลาทรบ - สงคลน จะท าใหเรารไดวาวตถอยทระยะเทาไหรใน
โครงการน ใชโมดลอลตราโซนคเซนเซอรเบอร SR04 ซงเปนแผงวงจรวดตรวจจบและวดระยะทาง
ดวยคลนอลตราโซนคทมความเทยงตรงสง โดยสามารถวดระยะไดตงแต 5 เซนตเมตร ไปจนถง 4
เมตร SR04 ถกออกแบบมาใหใชงานกบไมโครคอนโทรลเลอรไดงายโดยใชขาเชอมตอเพยง 1 หรอ
2 ขา ขนอยกบการก าหนดรปแบบการท างานทางฮารดแวร SR04 จะท าการสงสญญาณคลนอลตรา
โซนคออกไป แลววดระยะเวลาทมสญญาณสะทอนตอบกลบมาเอาตพตทไดจาก SR04 จะอยในรป
ของความกวางพลสซงสมพนธกบระยะทางของวตถทตรวจจบได ความถสญญาณอลตราโซนคของ
SR04 คอ 40 kHz ระยะทางทไดนน จะตองมการค านวณคากลบทางคณตศาสตร เมอใชกบ
ไมโครคอนโทลเลอรแลว ถอวาเปนเรองยงยากพอสมควร ดงนน SR04 จงประมวลผลคาทาง
คณตศาสตรตางๆเหลานไวแลว จากนนสงผลลพธทวดไดออกมาเปนพลสทมความกวางสมพนธกบ
ระยะทางทวดได
11
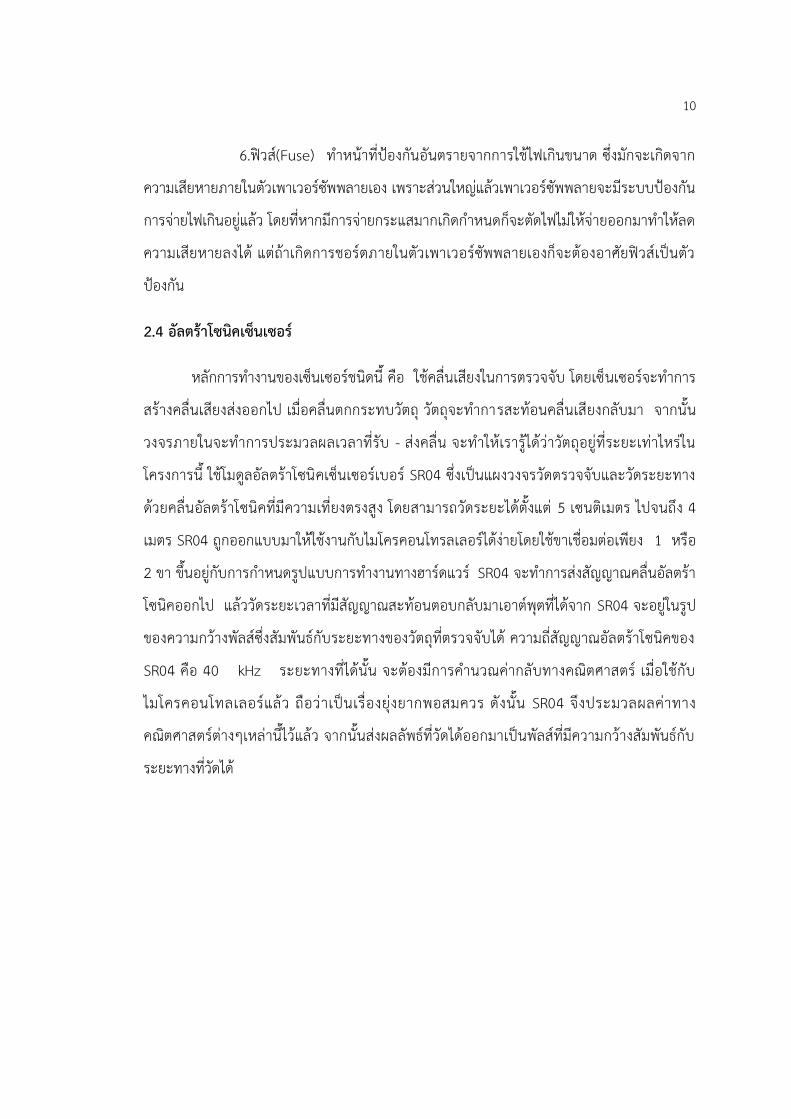
รปท 2.12 อลตราโซนคเซนเซอรเบอร SR04
2.4.1 จดตอใชงานของ SR04
1.ขาไฟเลยง (+5V) ส าหรบตอไฟเลยงแรงดน +5V
2.ขา Echo Pulse Output (ECHO) เปนขาเอาตพตส าหรบสงสญญาณพลสออก
จาก SR04 ซงการใชงานจะน าขานไปตอเขากบพอรตอนพตของไมโครคอนโทรลเลอรเพอตรวจจบ
ความกวางของสญญาณพลสทสงออกมาเพอแปลความหมายออกมาเปนระยะทางอกครงหนง
3.ขา Trigger Pulse Input (TRIGGER) เปนขาอนพตรบสญญาณพลสทมความ
กวางอยางนอย 10 ไมโครวนาทเพอกระตนการสรางอลตราโซนคความถ 40 kHz ออกสอากาศจาก
ตวสง ดงนนเมอคลนความถดงกลาวนเคลอนทไปกระทบสงกดขวางทอยเบองหนากจะเกดการ
สะทอนกลบเขามายงตวรบ และถกแปลงออกมาเปนความกวางของสญญาณพลสทจะสงออกไปทาง
ขา Echo Pulse Output นอกจากนในโหมด 1สญญาณจะใชจดนเปนจดสอสารขอมลอนกรมเพอ
รบสงคาการวดกบไมโครคอนโทรลเลอร
4.ขา GND ส าหรบตอกราวด
2.5 เครองสบนา
หลกการทส าคญของเครองสบน าในการสบน า คอ การทใบจกร ( Impellers) ซงถกแรงบด
ของเพลาบดใหเครองทรอบแกนเพลาดวยความเรวสงในกอนของเหลว บานกงหน (Blade) จะเบยด
กบของเหลว ท าใหของเหลววงเรวขน และมความเรวเชงมมสงขน มหวความดนสง เมอหลดออกจาก
ชองของบานกงหนแลวกยงวงดวยความเรวสงตอไป ในสบบางชนดจะลดความเรวของของเหลวนลง
12
ดวยเปลอกหอยโขง (Volute Casing) จะท าใหความเรวลดลงแตหวความดนเพมขนของไหลไปไดไกล
ยงขน หรอขนสงไดกวาเดม
เครองสบน าหรอปมน า เปนอปกรณส าหรบขบเคลอนของเหลวหรอกาซผานทางระบบทอปด
(Pipe) ไปสจดหมายการใชงานทตองการโดยการเพมความดนและเพมพลงงานใหแกของไหลนนๆ
เปนผลใหของเหลว นนเคลอนทจากจดหนงไปยงอกจดหนง หรอจากระดบหนงไปยงอกระดบหนง แต
กลไกทใชในการเพมพลงงานใหของเหลวไมไดจ ากดอยเฉพาะใบพด อาจเปนไดทงใบพด (Impeller)
เกลยว (Screw) ลกสบ (Piston) ไดอะแฟรม (Diaphragm) เฟอง (Gear) และกลไกอนๆ ซงสามารถ
ทจะถายทอดพลงงานใหกบของเหลวได ซงเครองแตละแบบมความเหมาะสมในการใชงานตางๆ
แตกตางกนออกไป การเลอกใชจะตองพจารณาถงปจจยตางๆ ทเกยวของอกมากมายหลายอยาง
2.5.1 ประเภทของเครองสบนา
ปมน าสามารถจดแบงประเภทไดหลายรปแบบ และมการเรยกชอแตกตางกนออกไป
มากมาย ซงแตทนยมแบงมอย 2 แบบดวยกน คอ
1. แยกตามลกษณะการเพมพลงงานใหแกของเหลว หรอการไหลของของเหลวใน
ปม ซงไดแก
- ประเภทแบบปมแรงเหวยง (Centrifugal Pump) เปนปมทมการท างาน
โดยการเพมพลงงานใหแกของเหลวโดยอาศยแรงเหวยงหนจดศนยกลาง ปมแบบนบางครงเรยกวา
เปนแบบ Rotor – dynamic
- ประเภทโรตาร (Rotary Pump) เปนปมทมการท างานโดยการเพม
พลงงานใหแกของเหลวโดยอาศยการหมนของฟนเฟองรอบแกนกลาง
- ประเภทลกสบ (Reciprocating Pump) เปนปมทมการท างานโดยการ
เพมพลงงานใหแกของเหลวโดยอาศยการอดโดยตรงในกระบอกสบ
- ประเภทพเศษ (Special Pump) เปนปมทมลกษณะพเศษไมสามารถจด
ใหอยในสามประเภทขางตน
2. แยกตามลกษณะการขบดนของเหลวในปม ซงแบงออกไดเปน 2 ประเภท
ดวยกนคอ
- ปรมาตรแทนทเชงบวก หรอแทนทโดยตรง (Positive Displacement)
ปมน าประเภทปรมาตรแทนทเชงบวก หรอแทนทโดยตรง เปนปมชนดทมการถายเทพลงงานใหแก
13
ของไหลแบบไมตอเนอง โดยการดดของไหลเขาไปในหองปดแลวลดปรมาตรของหองนนใหเลกลง
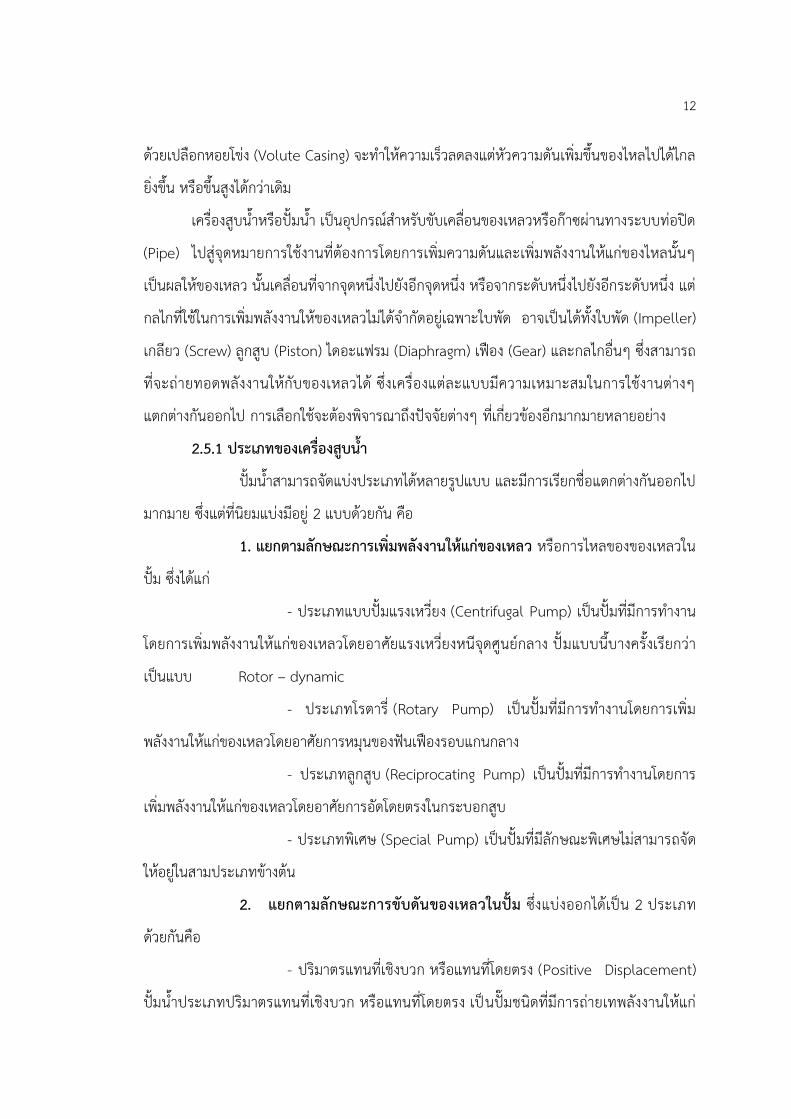
เพอใหความดนเพมขน โดยปมทจดอยในประเภทน คอ ปมลกสบ (Reciprocating Pump) และปม
โรตาร (Rotary Pump) ปมชนดนจะจายของไหลดวยปรมาตรทแนนอนคาหนงตอการหมนรอบหนง
ของเพลา และสามารถรบความดนทสงขนในระบบไดด ปมประเภทนเหมาะส าหรบสบของไหลใน
ปรมาณทไมมากนก แตตองการเฮดในระบบทสง ปมแบบลกสบจะมลกษณะการเคลอนทกลบไป
กลบมา โดยมลกสบท าหนาทในการอดของไหลภายในกระบอกสบใหมความดนสงขน ของเหลวทใช
ปมประเภทนจะตองมความสะอาดเพยงพอทไมท า ใหชนสวนทเคลอนทภายในกระบอกสบเกดการ
สกหรอทเรวขน การอดตวของของไหลแตละครงจะเปนจงหวะตามการเคลอนทกลบไปมาของลกสบ
ไมมการตอเนองกนจงท าใหการไหลของของไหลมลกษณะเปนหวงๆ (Pulsation)
รปท 2.13 ลกษณะการท างานของปมลกสบ
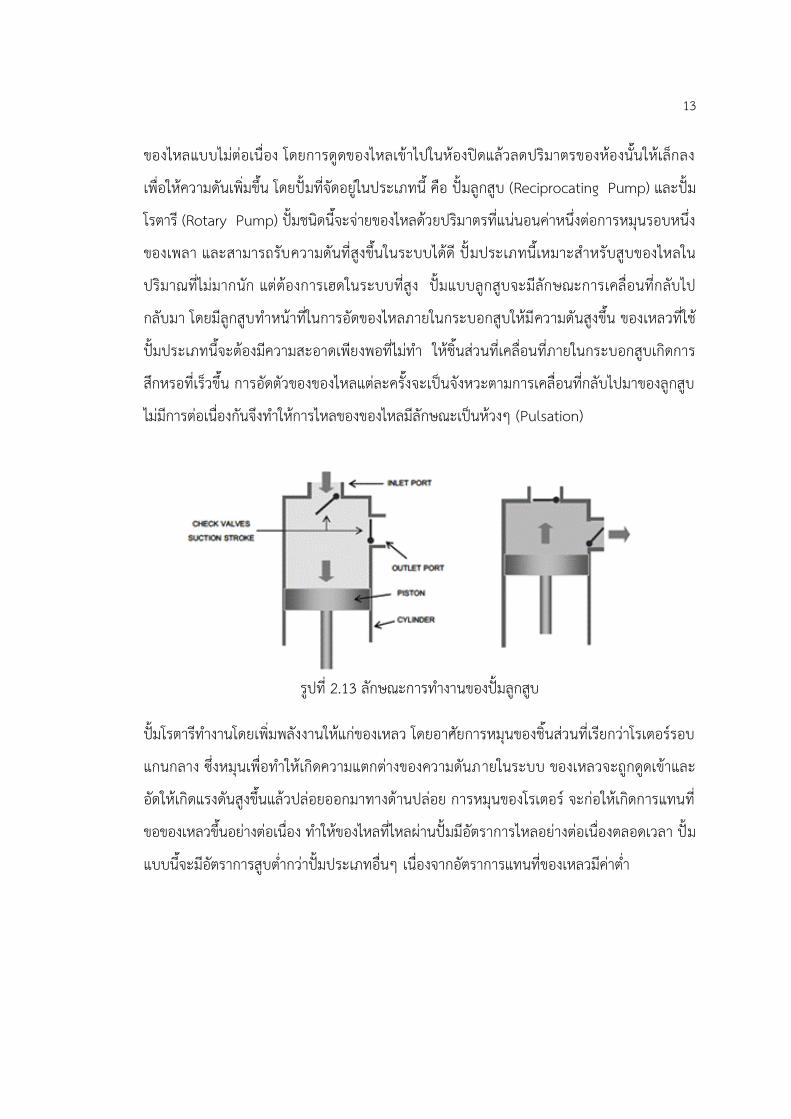
ปมโรตารท างานโดยเพมพลงงานใหแกของเหลว โดยอาศยการหมนของชนสวนทเรยกวาโรเตอรรอบ
แกนกลาง ซงหมนเพอท าใหเกดความแตกตางของความดนภายในระบบ ของเหลวจะถกดดเขาและ
อดใหเกดแรงดนสงขนแลวปลอยออกมาทางดานปลอย การหมนของโรเตอร จะกอใหเกดการแทนท
ขอของเหลวขนอยางตอเนอง ท าใหของไหลทไหลผานปมมอตราการไหลอยางตอเนองตลอดเวลา ปม
แบบนจะมอตราการสบต ากวาปมประเภทอนๆ เนองจากอตราการแทนทของเหลวมคาต า
14
รปท 2.14 ปมโรตารชนดปมเฟอง และ ปมแบบแผนกวาด
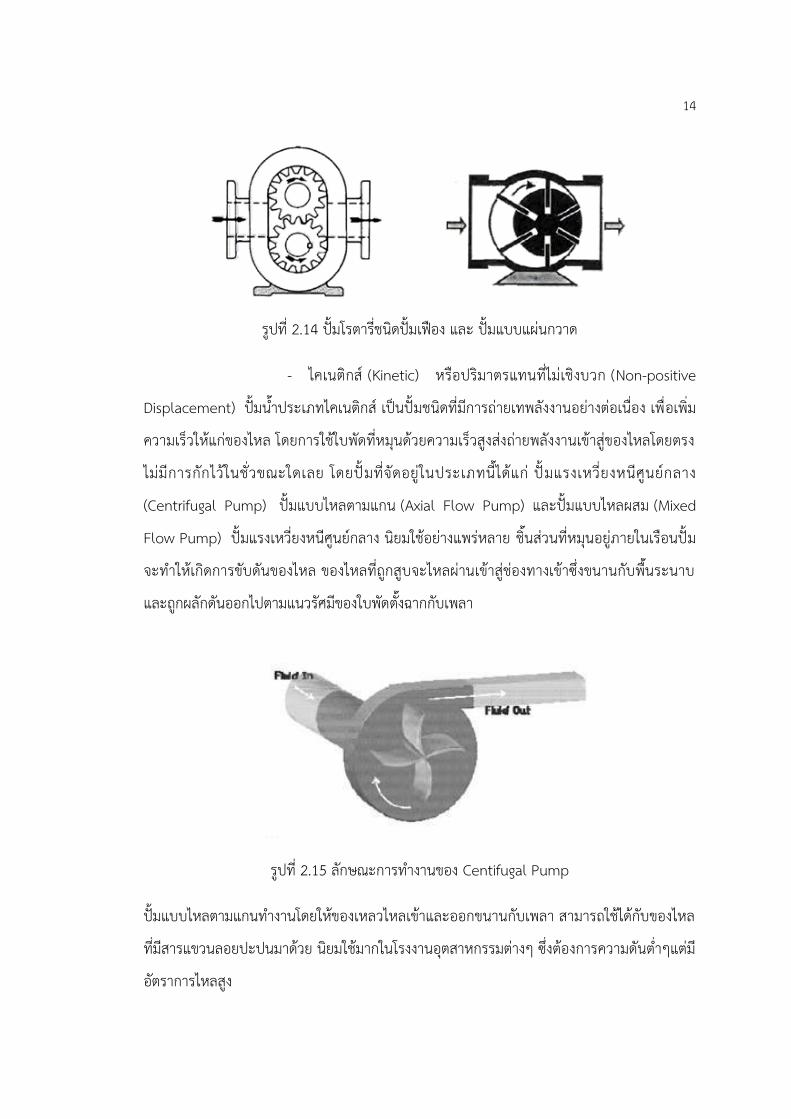
- ไคเนตกส (Kinetic) หรอปรมาตรแทนทไมเชงบวก (Non-positive
Displacement) ปมน าประเภทไคเนตกส เปนปมชนดทมการถายเทพลงงานอยางตอเนอง เพอเพม
ความเรวใหแกของไหล โดยการใชใบพดทหมนดวยความเรวสงสงถายพลงงานเขาสของไหลโดยตรง
ไมมการกกไวในชวขณะใดเลย โดยปมทจดอยในประเภทนไดแก ปมแรงเหวยงหนศนยกลาง
(Centrifugal Pump) ปมแบบไหลตามแกน (Axial Flow Pump) และปมแบบไหลผสม (Mixed
Flow Pump) ปมแรงเหวยงหนศนยกลาง นยมใชอยางแพรหลาย ชนสวนทหมนอยภายในเรอนปม
จะท าใหเกดการขบดนของไหล ของไหลทถกสบจะไหลผานเขาสชองทางเขาซงขนานกบพนระนาบ
และถกผลกดนออกไปตามแนวรศมของใบพดตงฉากกบเพลา
รปท 2.15 ลกษณะการท างานของ Centifugal Pump
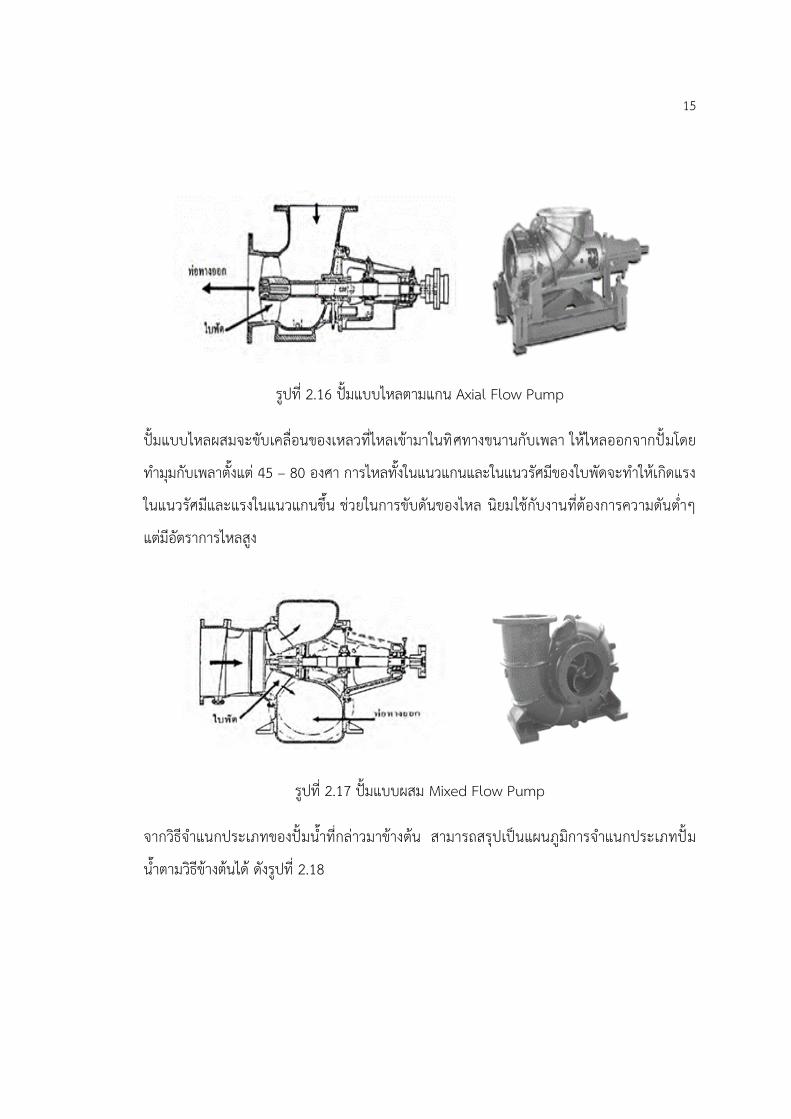
ปมแบบไหลตามแกนท างานโดยใหของเหลวไหลเขาและออกขนานกบเพลา สามารถใชไดกบของไหล
ทมสารแขวนลอยปะปนมาดวย นยมใชมากในโรงงานอตสาหกรรมตางๆ ซงตองการความดนต าๆแตม
อตราการไหลสง
15
รปท 2.16 ปมแบบไหลตามแกน Axial Flow Pump
ปมแบบไหลผสมจะขบเคลอนของเหลวทไหลเขามาในทศทางขนานกบเพลา ใหไหลออกจากปมโดย
ท ามมกบเพลาตงแต 45 – 80 องศา การไหลทงในแนวแกนและในแนวรศมของใบพดจะท าใหเกดแรง
ในแนวรศมและแรงในแนวแกนขน ชวยในการขบดนของไหล นยมใชกบงานทตองการความดนต าๆ
แตมอตราการไหลสง
รปท 2.17 ปมแบบผสม Mixed Flow Pump
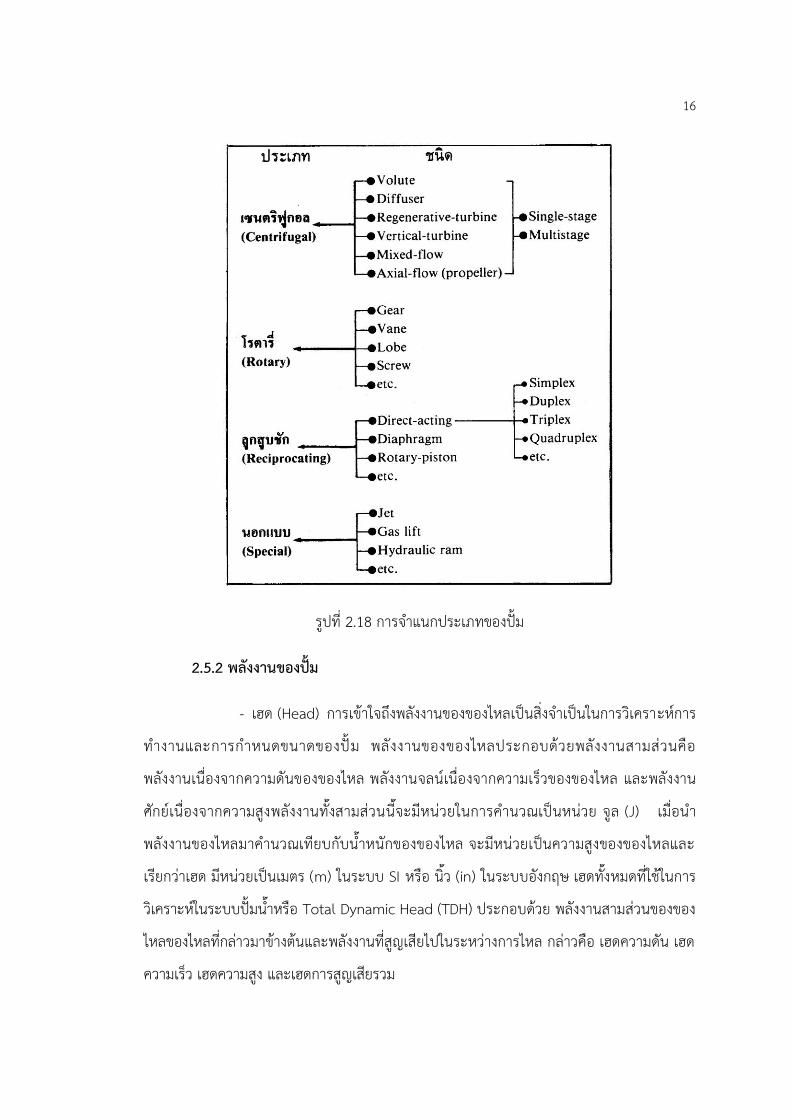
จากวธจ าแนกประเภทของปมน าทกลาวมาขางตน สามารถสรปเปนแผนภมการจ าแนกประเภทปม
น าตามวธขางตนได ดงรปท 2.18
16
รปท 2.18 การจ าแนกประเภทของปม
2.5.2 พลงงานของปม
- เฮด (Head) การเขาใจถงพลงงานของของไหลเปนสงจ าเปนในการวเคราะหการ
ท างานและการก าหนดขนาดของปม พลงงานของของไหลประกอบดวยพลงงานสามสวนคอ
พลงงานเนองจากความดนของของไหล พลงงานจลนเนองจากความเรวของของไหล และพลงงาน
ศกยเนองจากความสงพลงงานทงสามสวนนจะมหนวยในการค านวณเปนหนวย จล (J) เมอน า
พลงงานของไหลมาค านวณเทยบกบน าหนกของของไหล จะมหนวยเปนความสงของของไหลและ
เรยกวาเฮด มหนวยเปนเมตร (m) ในระบบ SI หรอ นว (in) ในระบบองกฤษ เฮดทงหมดทใชในการ
วเคราะหในระบบปมน าหรอ Total Dynamic Head (TDH) ประกอบดวย พลงงานสามสวนของของ
ไหลของไหลทกลาวมาขางตนและพลงงานทสญเสยไปในระหวางการไหล กลาวคอ เฮดความดน เฮด
ความเรว เฮดความสง และเฮดการสญเสยรวม
17
- เฮดความดน (Pressure Head; HP) คาความดนนอกจากจะบอกเปนแรงตอหนง
หนวยพนท เชน นวตนตอตารางเมตร (N/m2) หรอปอนดตอตารางนว (psi) แลวถาเปนความดนของ
ของเหลวกมกจะนยมบอกเปนแทงความสงของของเหลวทจะกอใหเกดความดนทก าหนดบนผวหนา
ซงรองรบแทงของเหลวนน ความดนซงบอกเปนแทงความสงของของเหลวนเรยกวา เฮดความดน
(Pressure Head) โดยความสมพนธระหวางความดน P และเฮดความดน HP คอ
เมอ
γ คอ น าหนกจ าเพาะ มหนวยเปน N/m3
ρ คอ ความหนาแนนของของเหลว มหนวยเปน kg/m3
g คอ ความเรงเนองจากแรงดงดดของโลก มหนวยเปน m/s2
- เฮดความเรว (Velocity Head; HV) ของเหลวทไหลในทอหรอทางน าเปดดวย
ความเรวใดๆ นนมพลงงานจลนอย พลงงานสวนนเมอบอกในรปของเฮดความเรว คอ
เมอ V คอ ความเรวของการไหล มหนวยเปน m/s
เฮดความเรวอาจใหค าจ ากดความอกอยางหนงวา เปนความสงทของเหลวตกลงมาดวยแรงดงดดของ
โลก จนไดความเรวเทากบความเรวในการไหลของของเหลวนน
- เฮดสถตย (Potential Head; Z) เฮดสถตย คอระยะทางตามแนวดงของของเหลว
ทไหลผานทอหรอทางน าเปดซงมพลงงานศกยอยภายใน พลงงานศกยสวนน สามารถเขยนในรปเฮด
ความสงไดเปน เฮดความสง = Z
- เฮดการสญเสยรวม (Total Head Loss, HL) Osborne Reynolds วศวกรชาว
ฝรงเศสไดท าการทดลองเพอแบงรปแบบการไหลของของไหล โดยก าหนดตามอตราสวนของแรงเฉอย
ตอแรงหนด (หรอแรงทเกดเนองจากความฝดของของไหล) และเรยกอตราสวนของแรงเฉอยกบแรง
หนดนวา คาเรยโนลด (Re) ค านวณหาไดจากสมการ
18
เมอ
V = ความเรวการไหลในทอ (m/s)
D = ขนาดวดผานศนยกลางทอ (m)
ρ = ความหนาแนนของไหล (kg/m3)
μ = ความหนดสมบรณ (N.s/m2)
υ = ความหนดจลน (m2/s)
ถาคา Re ≤ 2000 ถอวาเปนการไหลแบบราบเรยบ
Re ≥ 4000 ถอวาเปนการไหลแบบปนปวน
2000 ≤ Re ≤ 4000 ถอวาเปนการไหลทอยในชวงการเปลยนแปลง
ในขณะทของเหลวไหลผานระบบทอทงทางดานดดและดานจาย พลงงานหรอเฮดในการไหลสวน
หนงจะสญเสยไปเนองจากความฝดระหวางของเหลวกบผนงภายในของทอ และพลงงานหรอเฮดใน
การไหลอกสวนหนงจะสญเสยไปเนองจากการสญเสยพลงงานจลนเมอไหลผานอปกรณตางๆ ผลรวม
ของการสญเสยพลงงานหรอเฮดทงสองสวนนรวมเรยกวาเฮดการสญเสยรวม
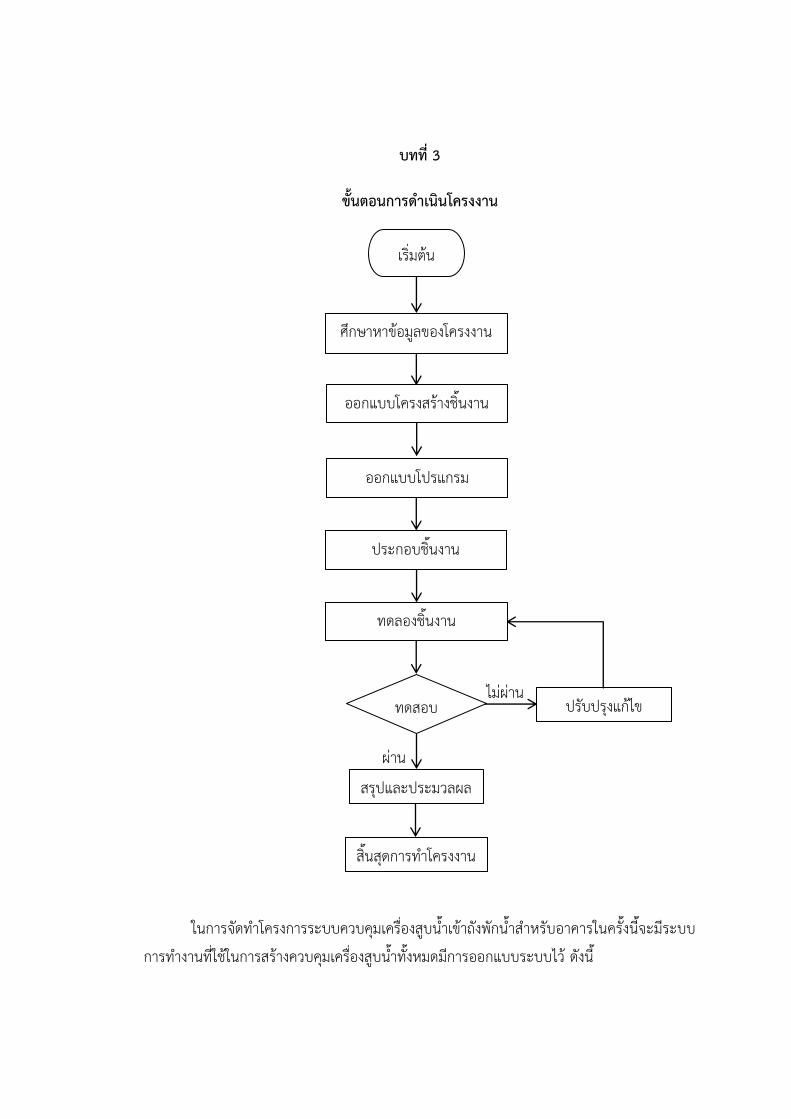
บทท 3
ขนตอนการด าเนนโครงงาน
ไมผาน
ผาน
ในการจดท าโครงการระบบควบคมเครองสบน าเ าถงพกน าส าหรบอาคารในครงนจะมระบบ การท างานทใช ในการสร างควบคมเครองสบน าทงหมดมการออกแบบระบบไว ดงน
ทดสอบ ปรบปรงแก ไ
สรปและประมวลผล
ศกษาหา อมลองโครงงาน
ออกแบบโครงสร างชนงาน
ออกแบบโปรแกรม
ประกอบชนงาน
ทดลองชนงาน
เรมต น
สนสดการท าโครงงาน
20
3.1 ระบบทอสบน าเขาถง
เมอได ศกษา อมลและด อมลองผ ทเคยท าโครงงานมาแล ว ปญหาทมกจะพบคอการ
กระเพอมองน า การสบน าเ าถงพกน าการวางทอเ าถงพกน านนกมความส าคญเปนอยางมาก
เพราะการกระเพอมองน านน สงผลตออลตร าโซนคเซนเซอรเปนอยางมาก อลตร าโซนคจะท าง าน
โดยอาศยการปลอยคลนความถออกไป และสะท อนกลบมาเชนเดยวกนเมอน ามการกระเพอมทมาก
การสะท อนองอลตร าโซนคเซนเซอร ยอมมการเปลยนแปลงอยตลอดเวลา จงได ท าการน าทอสบน า
เ าถงพกน าเ าทางด านลางเพอลดการกระเพอมองน าให ได มากทสด
3.2 ระบบการระบายน า
เนองจากาออกนนไมได ใช เครองสบน าเปนตวชวยในการระบายน าออกจากถง จงใช แรงโน มถวงองโลกเปนตวชวยในการระบาย โดยการสร างโครงสร างให มพนทตางระดบกน การระบายน าออกนนกเปนการจ าลองวามผ ใช น ามากน อยเพยงใด นอกจากนการระบบน าหากระดบความสงต าองถงนนเทากนแรงดนน าจะคงทจะไมสามารถระบายไปอกถงได
3.3 ระบบวางเครองสบน า
ในการวางเครองสบน านนต องวางตามท Name place วาต องวางตงฉากหรอแนวนอนดงนนการวางปมเพอให ได ประสทธภาพสงสดองปมจงต องวางตามแนวนอน หรอตามท Name placeก าหนดมา จงจะสามารถมแรงบเคลอนองเหลวได ด
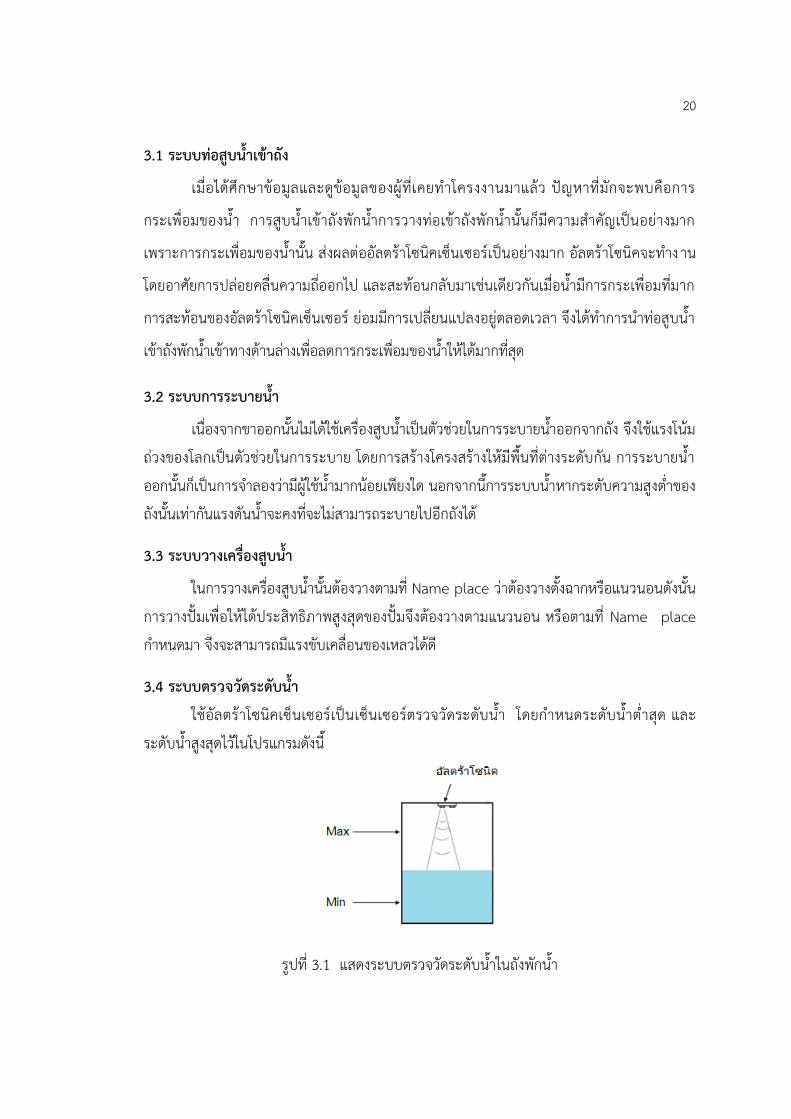
3.4 ระบบตรวจวดระดบน า ใช อลตร าโซนคเซนเซอรเปนเซนเซอรตรวจวดระดบน า โดยก าหนดระดบน าต าสด และระดบน าสงสดไว ในโปรแกรมดงน
รปท 3.1 แสดงระบบตรวจวดระดบน าในถงพกน า
21
หมายเหต : ลกษณะองทอน าทสบเ า เหตผลทเจาะทอจากด านลาง เนองจากจะเปนการชวยลดการ
กระทบกนระหวางน าทสบเ ากบน าภายในถง ซงเปนสาเหตให ผวน าไมสม าเสมอท าให การวดระยะ
ผดพลาดได ความกว างแปรผนตามกบระยะทางระหวาง ตวเซนเซอรกบผวน าซงจะน าความกว าง
องสญญาณพลสทรบจากเซนเซอรนไปวเคราะห เพอค านวณหาระดบน าภายในถงพกน าตอไป
3.5 วงจรเปดปดเครองสบน า เปนการใช ไมโครคอนโทรลเลอรควบคมรเลยเพอเปดปดวงจรอง เครองสบน าโดยใช อลตร าโซนคเซนเซอรเปนตววดระดบน าโดยมเงอนไดงน
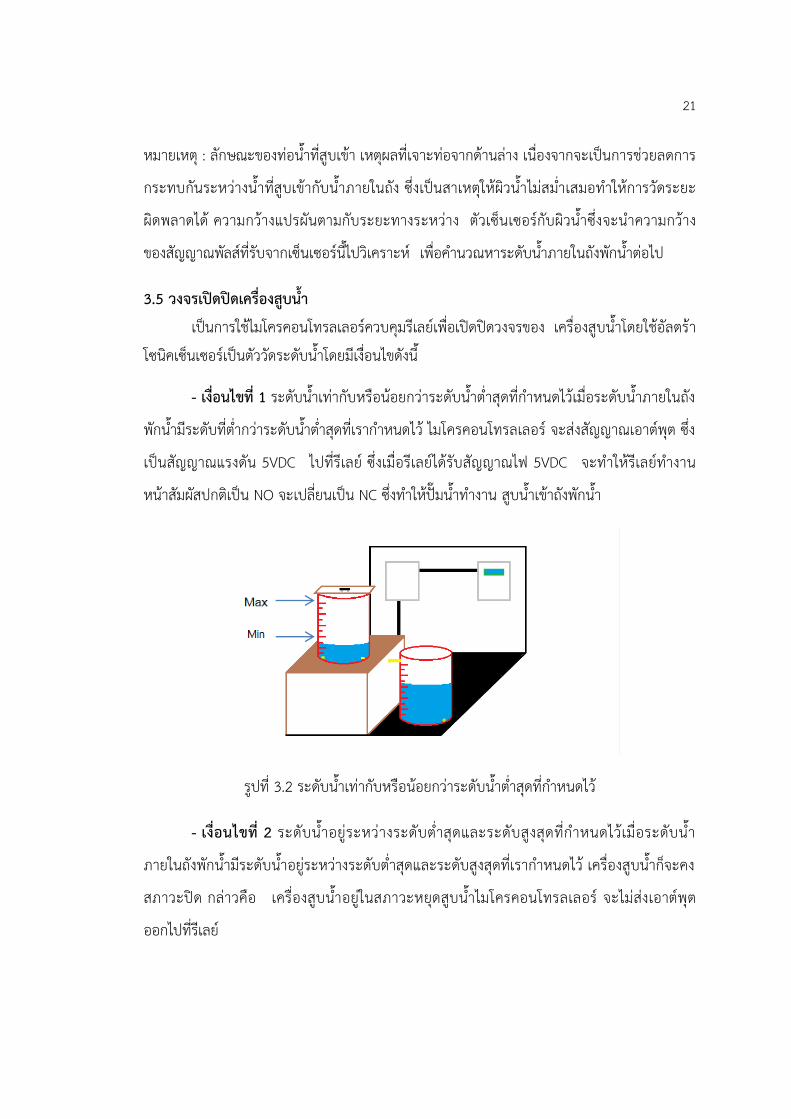
- เงอนไขท 1 ระดบน าเทากบหรอน อยกวาระดบน าต าสดทก าหนดไว เมอระดบน าภายในถง
พกน ามระดบทต ากวาระดบน าต าสดทเราก าหนดไว ไมโครคอนโทรลเลอร จะสงสญญาณเอาตพต ซง
เปนสญญาณแรงดน 5VDC ไปทรเลย ซงเมอรเลยได รบสญญาณไฟ 5VDC จะท าให รเลยท างาน
หน าสมผสปกตเปน NO จะเปลยนเปน NC ซงท าให ปมน าท างาน สบน าเ าถงพกน า
รปท 3.2 ระดบน าเทากบหรอน อยกวาระดบน าต าสดทก าหนดไว
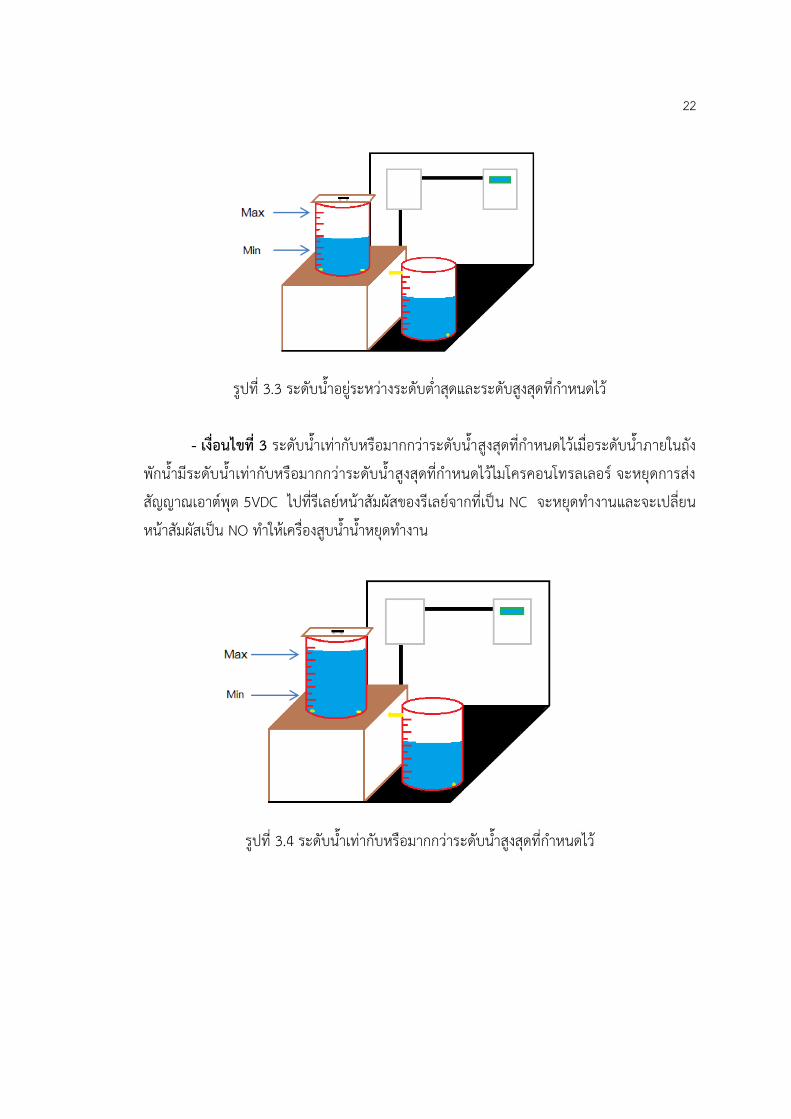
- เงอนไขท 2 ระดบน าอยระหวางระดบต าสดและระดบสงสดทก าหนดไว เมอระดบน า
ภายในถงพกน ามระดบน าอยระหวางระดบต าสดและระดบสงสดทเราก าหนดไว เครองสบน ากจะคง
สภาวะปด กลาวคอ เครองสบน าอยในสภาวะหยดสบน าไมโครคอนโทรลเลอร จะไมสงเอาตพต
ออกไปทรเลย
22
รปท 3.3 ระดบน าอยระหวางระดบต าสดและระดบสงสดทก าหนดไว
- เงอนไขท 3 ระดบน าเทากบหรอมากกวาระดบน าสงสดทก าหนดไว เมอระดบน าภายในถงพกน ามระดบน าเทากบหรอมากกวาระดบน าสงสดทก าหนดไว ไมโครคอนโทรลเลอร จะหยดการสงสญญาณเอาตพต 5VDC ไปทรเลยหน าสมผสองรเลยจากทเปน NC จะหยดท างานและจะเปลยนหน าสมผสเปน NO ท าให เครองสบน าน าหยดท างาน
รปท 3.4 ระดบน าเทากบหรอมากกวาระดบน าสงสดทก าหนดไว
23
ไมจรง จรง จรง
ไมจรง
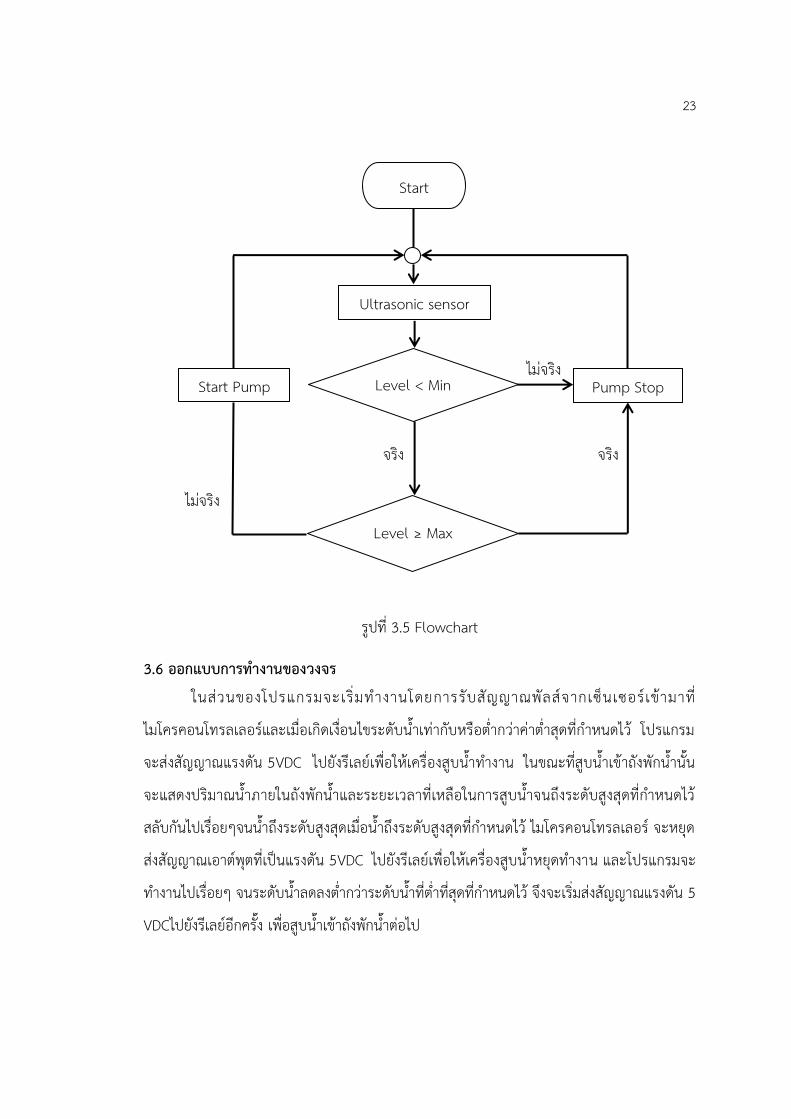
รปท 3.5 Flowchart
3.6 ออกแบบการท างานของวงจร ในสวนองโปรแกรมจะเรมท างานโดยการรบสญญาณพลสจากเซนเซอร เ ามาท
ไมโครคอนโทรลเลอรและเมอเกดเงอนไระดบน าเทากบหรอต ากวาคาต าสดทก าหนดไว โปรแกรม
จะสงสญญาณแรงดน 5VDC ไปยงรเลยเพอให เครองสบน าท างาน ในณะทสบน าเ าถงพกน านน
จะแสดงปรมาณน าภายในถงพกน าและระยะเวลาทเหลอในการสบน าจนถงระดบสงสดทก าหนดไว
สลบกนไปเรอยๆจนน าถงระดบสงสดเมอน าถงระดบสงสดทก าหนดไว ไมโครคอนโทรลเลอร จะหยด
สงสญญาณเอาตพตทเปนแรงดน 5VDC ไปยงรเลยเพอให เครองสบน าหยดท างาน และโปรแกรมจะ
ท างานไปเรอยๆ จนระดบน าลดลงต ากวาระดบน าทต าทสดทก าหนดไว จงจะเรมสงสญญาณแรงดน 5
VDCไปยงรเลยอกครง เพอสบน าเ าถงพกน าตอไป
Start
Ultrasonic sensor
Pump Stop
Level ≥ Max
Level < Min Start Pump
24
หลกการค านวณอตราการไหล ( Rate ) ก าหนดโปรแกรมให ระยะหางในการตรวจจบแตละรอบเทากบ 3 วนาท และให
ระดบน าทตรวจจบในครงแรกเทากบ lv1 หลงจากนน 3 วนาท ให ระดบน าใหมเทากบ lv2 จะได
อตราการไหลองน า เทากบ Rate = |lv1 - lv2| / 3 L/sec
หลกการค านวณปรมาณน า (Level)
ต าแหนงองเซนเซอรนนตดตงไว ทอบบนองถงน าดงนน ระยะทเซนเซอรวดได คอ ความลกองน ากลาวคอ เมอระยะหางทเซนเซอรวดได มคามาก ปรมาณองน าจะน อย ในทางกลบกน ถ าระยะหางทเซนเซอรวดได มคาน อยปรมาณองน าจะมคามาก ความยาวเส นรอบวงองถง 75 เซนตเมตร ความสงองถง 28 เซนตเมตร รศมองถงน า เทากบ 2πr = 75 cm
r = 75/2π cm
r = 11.93 cm
พนทหน าตดองถงน า เทากบ πr2 = 447.13 cm2
เพราะฉะนน จะวดปรมาณน าได ต องทราบความสงองน าจากด านลางองถงให d เทากบระยะหาง
ระหวางผวน ากบเซนเซอร หนวยเปนมลลเมตร และ lv เทากบปรมาณน า จะได ปรมาณน าเทากบ
Lv = ( 28-d )x447.13 cm3 หรอ Lv = ( 28-d )x447.13 L

บทท 4
การทดลองระบบควบคมเครองสบน า
4.1 การสรางระบบสบน าเขาถงพกน าเพอใชในการทดลอง
การสรางระบบจ าลองการสบน าเขาถงพกน าหรบอาคาร เพอใชเปนระบบสบน าส าหรบการทดลองซงมการจ าลองการใชน าในปรมาณตางๆ โดยอปกรณสบน า ใช Diaphragm Pump ขนาด 12V 31W สามารถสบน าไดในอตรา 2 ลตรตอนาท ถงน าขนาดบรรจ 10 ลตร เจาะรถงและตดตงวาลวเปด/ปดน า ซงจะเปนการจ าลองการใชน า
รปท 4.1ระบบควบคมน าอตโนมตโดย Arduino
26
4.2 การทดลองระบบควบคมเครองสบน า เปนการทดลองใชระบบควบคมเครองสบน าทประกอบทกระบบเขาดวยกนแลว เพอรกษา
ปรมาณน าในถงกบระบบสบน าทสรางขนมา เพอทดสอบโปรแกรมทเขยนขนมาเพอระบบควบคม โดยถงน าทใชในการทดลอง มขนาดความยาวเสนรอบวงของถง 75 เซนตเมตร สง 28 เซนตเมตร และมความจ 10 ลตร เขยนโปรแกรม Arduino ซงประกอบดวย โปรแกรมระบบตรวจวดระดบน าโปรแกรมระบบเปด-ปดเครองสบน าโดยรเลย โปรแกรมค านวณปรมาณน าในถงพกน า และประกอบระบบตางๆเขาดวยกน และเรมการสบน าเขาถงเพอทดสอบระบบตางๆ
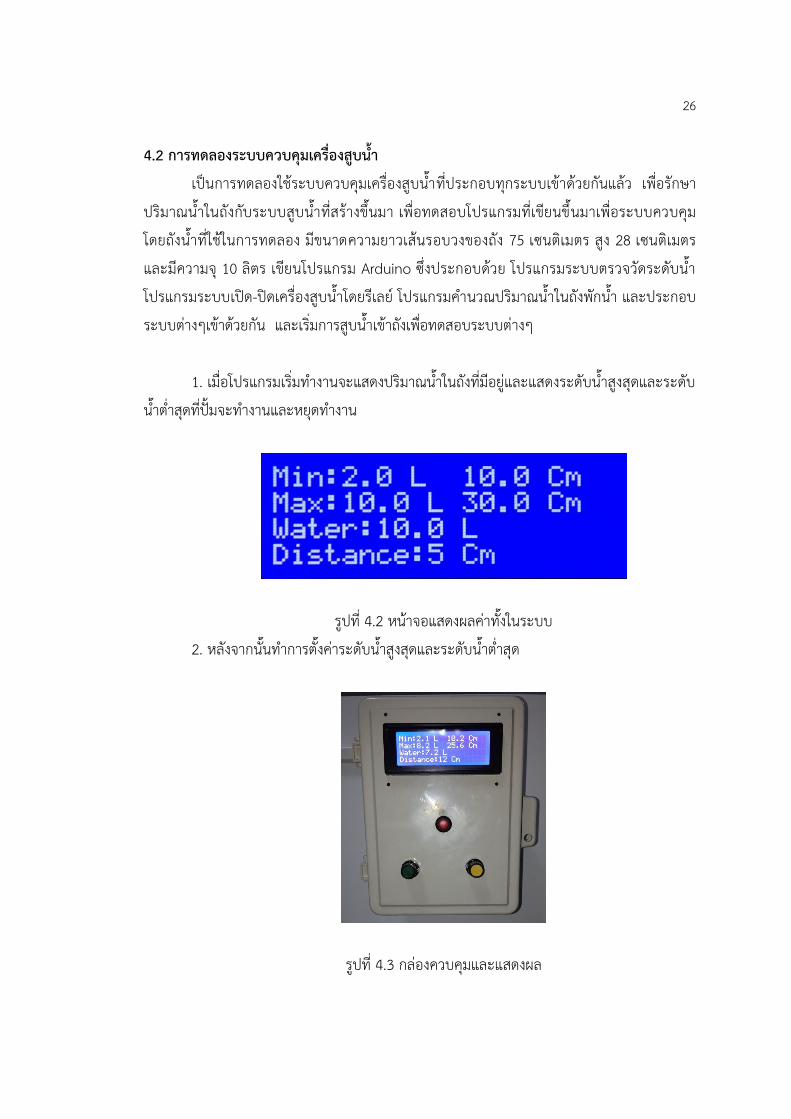
1. เมอโปรแกรมเรมท างานจะแสดงปรมาณน าในถงทมอยและแสดงระดบน าสงสดและระดบ
น าต าสดทปมจะท างานและหยดท างาน
รปท 4.2 หนาจอแสดงผลคาทงในระบบ 2. หลงจากนนท าการตงคาระดบน าสงสดและระดบน าต าสด
รปท 4.3 กลองควบคมและแสดงผล

27
3. ทดลองปลอยน าออกจากถงเกบน าใหมระดบลดนอยลงกวาคา Min ทตงไว จะพบวาเซนเซอรท าการสงใหรเลยเปลยนหนาสมผส ท าใหปมน าท าการสบน าจากถงพกน าขนมา จะแสดงผลดงน
รปท 4.4 การแสดงผลคาระดบน าต าสด (Min) บนหนาจอ LCD
รปท 4.5 การปลอยน าออกจากถงเกบน า
4. เมอปมน าท าการสบน าเขาถงเกบน าจนถงระดบสงสด (Max) ทตงคาไว เซนเซอรจะท าการสงใหรเลยเปลยนหนาสมผส ท าใหปมน าหยดท างาน จะแสดงผลดงน
รปท 4.6 การแสดงผลคาระดบน าต าสด (Max) บนหนาจอ LCD

28
รปท 4.7 รปการสบน าขนถงเกบน าทระดบสงสด (Max)
5. ทดลองตงคาระดบน าสงสด(Max)และระดบน าต าสด(Min)ใหม โดยการทดลองจะตงคา(Max)ไวท 8 ลตร และคา(Min)ไวท 4 ลตร จะแสดงผลดงน
รปท 4.8 แสดงผลการตงคาระดบ Max และ Min
29
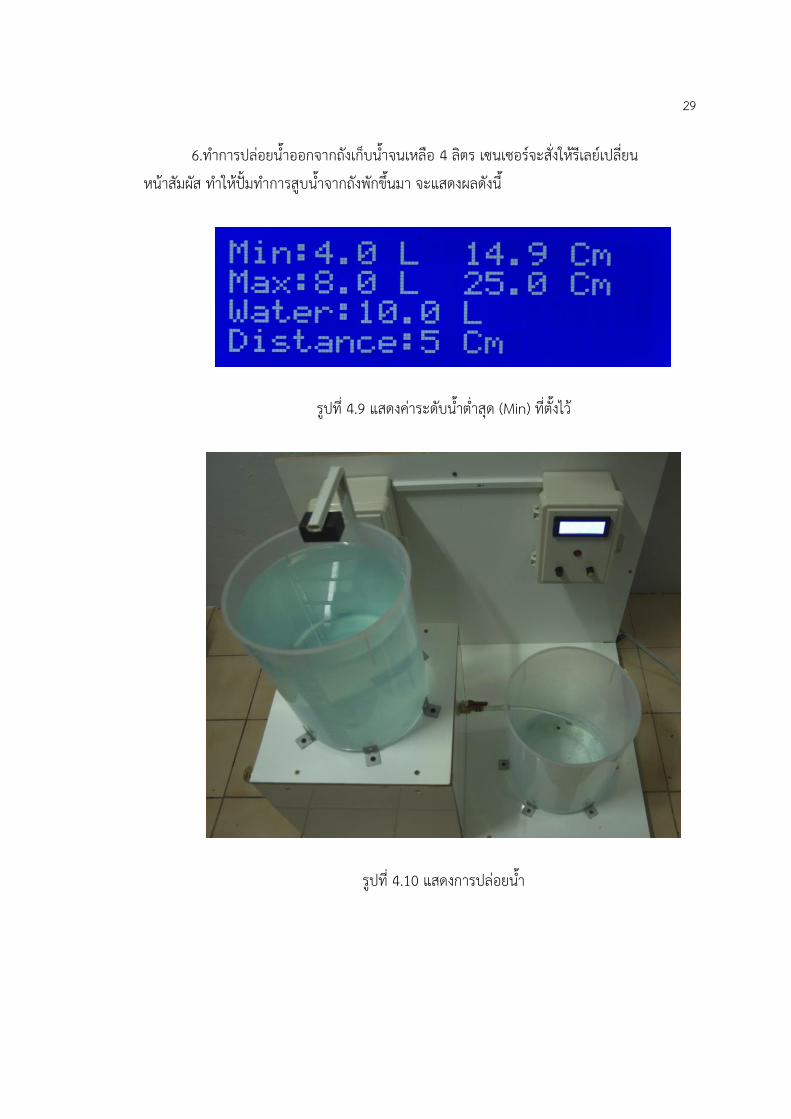
6.ท าการปลอยน าออกจากถงเกบน าจนเหลอ 4 ลตร เซนเซอรจะสงใหรเลยเปลยนหนาสมผส ท าใหปมท าการสบน าจากถงพกขนมา จะแสดงผลดงน
รปท 4.9 แสดงคาระดบน าต าสด (Min) ทตงไว
รปท 4.10 แสดงการปลอยน า

30
7.เมอปมน าท าการสบน าเขาถงเกบน าจนถงระดบ 8 ลตรทตงคาไว เซนเซอรจะท าการสงใหรเลยเปลยนหนาสมผส ท าใหปมน าหยดท างาน จะแสดงผลดงน
รปท 4.11 แสดงระดบน าเมอถงระดบ (Max) ทตงคาไว
รปท 4.12 แสดงระดบน าในถง
บทท 5 สรปผลโครงงานและขอเสนอแนะ
5.1 สรปผลการจดท าโครงงาน ผลการทดลองเปนไดตามเปาหมายทไดวางไว สามารถน ามาใชประโยชนไดทเกยวกบของเหลว หรอแมกระทงตองการความถกตองของระดบน า ซงมความเทยงตรงในระดบทด
5.1.1 ระบบสบน าเขาถงพกน า เมอท าการทดลองการสรางระบบสบน าเขาถงพกน าเพอใชในการทดลอง ต าแหนงปลาย
ของทอน าทตอเขาสถงพกน า เมออยทต าแหนงลางของถงพกน า จะท าใหผวน าเรยบทสดเมอท าการ
สบน าเขาถงเมอเปรยบเทยบกบต าแหนงกลางถงและปากถง ซงสงผลดตอการท างานของอลตรา
โซนคเซนเซอร และความยาวของทอน ามสวนท าใหน าในถงเตมไวมากขน และเปนการประหยด
พลงงานในทางออมอกดวย
5.1.2 โปรแกรมควบคมเครองสบน า ระบบนนสามารถควบคมปมน าใหเปด-ปดตามเปาหมาย และสามารถปรบระดบคาทตงได
คอ ระดบ Min ระดบน าทต าสดทจะเปนตวก าหนดใหปมท างาน และอกระดบคอ Max ระดบน าทสง
ซงจะเปนตวทก าหนดใหปมหยดท างาน และยงสามารถแสดงปรมาณน าในถงวามกลตรและเหลอก
ลตรได
5.2 อปสรรคในการทดลอง
- จอ LCD เมอระดบถงระดบสงสดตามทไดก าหนดไวรเลยจะท าการตดวงจรออกเพอใหปม
หยดท างาน แตจอ LCD ดบไปพรอมกบตอนทรเลยตด
- ปรบระดบใหตรงคอนขางยากเพราะความละเอยดในการวดอลตราโซนคเซนเซอรคอ 1 cm
5.3 ขอเสนอแนะ - เนองจากทรเลยมกระแสยอนกลบจงตองท าการเปลยนมาใชรเลย Opto isolated ตามค าแนะน าของผเชยวชาญ - ตองใชอลตราโซนคทมความละเอยดทมากกวาตว SR04
32
เอกสารอางอง
[1] ผศ.ดร. กรต ชยะกลคร. การปองกนระบบไฟฟาก าลงและรเลย. พมพครงท 1. ส านกพมพมหาวทยาลยศรปทม กรงเทพฯ, 2552 [2] ประจน พลงสนตกล. พนฐานภาษา C ส าหรบ Arduino. พมพครงท 1 .ส านกพมพแอพซอฟต [3] ประสทธพร แซเฮง. 2525. สวตชงเพาเวอรซพพลาย. กรงเทพมหานคร: ซเอดยเคชน. [4] พจนาฎ สวรรณมณ. เซนเซอรและทรานสดวเซอรเบองตน. พมพครงท 10. ซเอดยเคชน. แทค กรงเทพฯ, 2545 [5] รศ.ดร. วบลย บญยธโรกล. ปมและระบบสบน า. ซเอดยเคชน. 2529

ภาคผนวก ก อปกรณทใชในการทดลอง
34
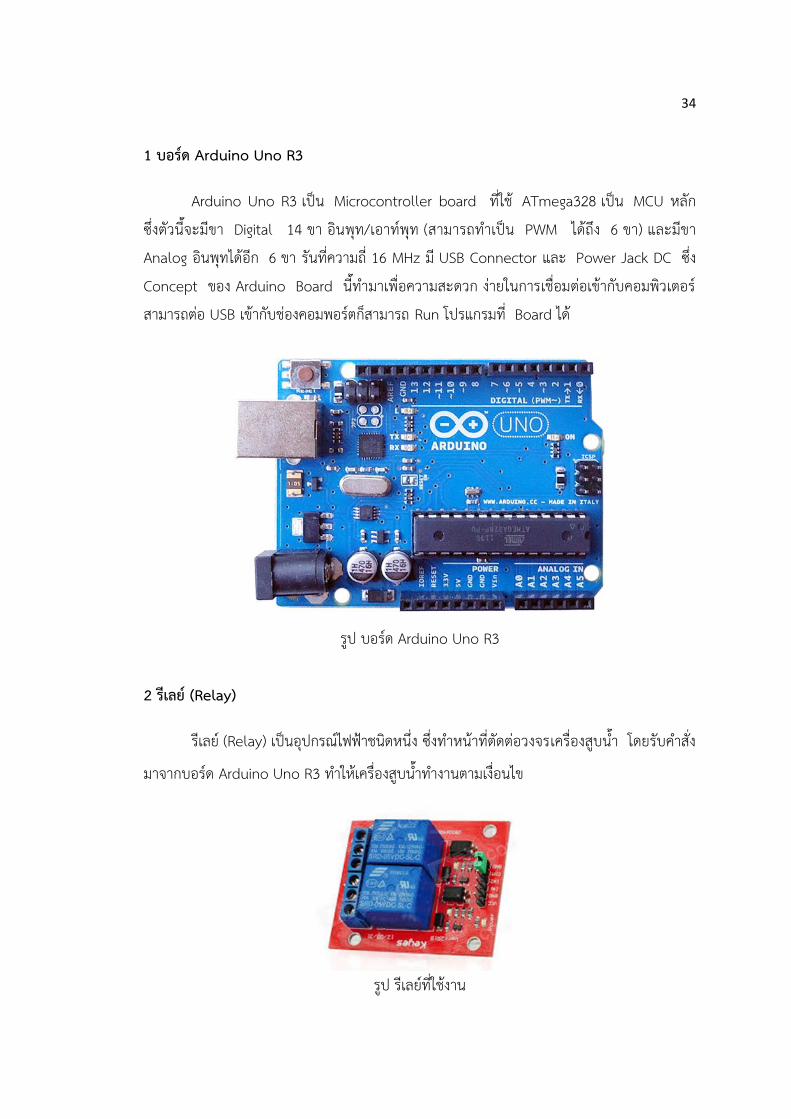
1 บอรด Arduino Uno R3
Arduino Uno R3 เปน Microcontroller board ทใช ATmega328 เปน MCU หลก ซงตวนจะมขา Digital 14 ขา อนพท/เอาทพท (สามารถท าเปน PWM ไดถง 6 ขา) และมขา Analog อนพทไดอก 6 ขา รนทความถ 16 MHz ม USB Connector และ Power Jack DC ซง Concept ของ Arduino Board นท ามาเพอความสะดวก งายในการเชอมตอเขากบคอมพวเตอร สามารถตอ USB เขากบชองคอมพอรตกสามารถ Run โปรแกรมท Board ได
รป บอรด Arduino Uno R3 2 รเลย (Relay)
รเลย (Relay) เปนอปกรณไฟฟาชนดหนง ซงท าหนาทตดตอวงจรเครองสบน า โดยรบค าสง
มาจากบอรด Arduino Uno R3 ท าใหเครองสบน าท างานตามเงอนไข
รป รเลยทใชงาน

35
3 อลตราโซนคเซนเซอร
อลตราโซนคท าหนาท ตรวจวดคลนสญญาณทสงออก และกลบมา เพอวดระยะทางแลวสง
สญญาณไปยงบอรด
รป อลตราโซนคเซนเซอร
4 Push Button Switch
Push Button Switch ท าหนาทตดตอไฟเลยงบอรด
รป Push Button Switch
36
5 จอ LCD 2004 Module 20x4
เมอรบไดสญญาณจากบอรด Arduino Uno R3 จะท าการแสดงผลผานทางจอ LCD
เพอทจะไดรบรขอมลการทดลอง
รป LCD 2004 Module 20x4
6 ตกนนา
ท าหนาทเกบอปกรณจ าพวก บอรด สาย รเลย ปลกสวตช จอlce เพอใหงายตอการใชงาน
และเปนระเบยบงายตอการแกไข
รป ตกนน า

ภาคผนวก ข การวดระดบน าโดย Arduino Uno R3
38
โปรแกรมทออกแบบ #include <NewPing.h> #define TRIGGER_PIN 8 #define ECHO_PIN 9 #define MAX_DISTANCE 200 #include <LiquidCrystal.h> LiquidCrystal lcd(12, 11, 5, 4, 3, 2); NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); int DistanceIn; int DistanceCm; int Distance; float wmin=2; float wmax=5; float water; int default_cm=30; void setup() { lcd.begin(20,4); pinMode(6,OUTPUT); pinMode(7,OUTPUT); pinMode(A0,INPUT); pinMode(A1,INPUT); digitalWrite(6,HIGH); digitalWrite(7,HIGH); }
39
void loop() { Distance = sonar.ping(); DistanceCm = sonar.convert_cm(Distance); water=fmap(DistanceCm,5,default_cm,10,0); wmin=fmap(analogRead(A0),0,1023,0,10); wmax=fmap(analogRead(A1),0,1023,0,10); lcd.setCursor(0,0); lcd.print("Min:"); lcd.print(wmin,1); lcd.print(" L "); lcd.setCursor(0,1); lcd.print("Max:"); lcd.print(wmax,1); lcd.print(" L "); lcd.setCursor(11,0); lcd.print(fmap(wmin,0,10,5,default_cm),1); lcd.print(" Cm "); lcd.setCursor(11,1); lcd.print(fmap(wmax,0,10,5,default_cm),1); lcd.print(" Cm "); lcd.setCursor(0,2); lcd.print("Water:"); lcd.print(water,1); lcd.print(" L "); lcd.setCursor(0,3);
40
lcd.print("Distance:"); lcd.print(DistanceCm); lcd.print(" Cm "); if(water<wmin){ drain("on"); } if(water>=wmax){ drain("off"); } } void drain(String msg){ if(msg=="on"){ digitalWrite(7,LOW); }else if(msg=="off"){ digitalWrite(7,HIGH); } } float fmap(float x, float x1, float x2, float y1, float y2) { return (x - x1) * (y2 - y1) / (x2 - x1) + y1;
41
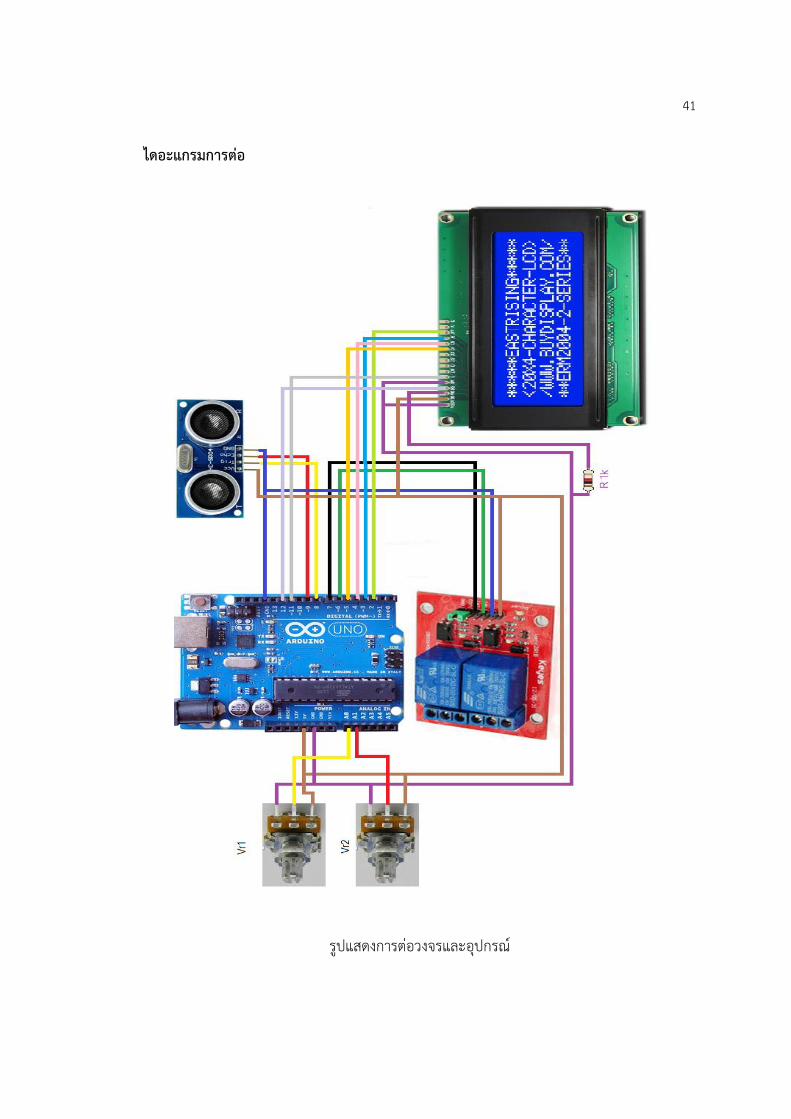
ไดอะแกรมการตอ
รปแสดงการตอวงจรและอปกรณ
42
ประวตผเขยน
ชอ – นามสกล นายระพพนธ ใจมา วน เดอน ป เกด 31 กรกฎาคม 2534 ภมล าเนา 66/1 หม 10 ต าบลเหมองงา อ าเภอเมอง จงหวดล าพน 51000 อเมล [email protected] ประวตการศกษา ระดบอาชวศกษา ประกาศนยบตรวชาชพ วทยาลยเทคนคล าพน
สาขาวชาไฟฟาก าลง พ.ศ.2553 ประกาศนยบตรวชาชพขนสง มหาวทยาลยเทคโนโลยราชมงคลลานนา สาขาวชาไฟฟาก าลง พ.ศ.2555
ระดบปรญญาตร วศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557
43
ประวตผเขยน
ชอ – นามสกล นายณฐพล ดวงศรทอง วน เดอน ป เกด 4 สงหาคม 2534 ภมล าเนา 26 หม 1 ต าบลรมปง อ าเภอเมอง จงหวดล าพน 51000 อเมล [email protected] ประวตการศกษา ระดบอาชวศกษา ประกาศนยบตรวชาชพ วทยาลยเทคนคล าพน
สาขาวชาไฟฟาก าลง พ.ศ.2553 ประกาศนยบตรวชาชพขนสง วทยาลยเทคนคล าพน สาขาวชาไฟฟาก าลง พ.ศ.2555
ระดบปรญญาตร วศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557
44
ประวตผเขยน
ชอ – นามสกล นายศรณย เขยวเหลก วน เดอน ป เกด 4 กรกฎาคม 2534 ภมล าเนา 2/1 หม 12 ต าบลบานกลาง อ าเภอเมอง จงหวดล าพน 51000 อเมล [email protected] ประวตการศกษา ระดบอาชวศกษา ประกาศนยบตรวชาชพ วทยาลยเทคนคล าพน
สาขาวชาไฟฟาก าลง พ.ศ.2553 ประกาศนยบตรวชาชพขนสง มหาวทยาลยเทคโนโลยราชมงคลลานนา สาขาวชาไฟฟาก าลง พ.ศ.2555
ระดบปรญญาตร วศวกรรมศาสตรบณฑต สาขาวชาวศวกรรมไฟฟา มหาวทยาลยเทคโนโลยราชมงคลลานนา พ.ศ.2557