Upload
monsterh5
View
223
Download
0
Embed Size (px)
Citation preview
7/24/2019 Athukorala Thesis
1/72
Mathematical Modeling of a Contact Lens and Tear Layer at Equilibrium
by
Bhagya U.A. Athukorallage, B.Sc.
A Thesis
in
Mathematics
Submitted to the Graduate Facultyof Texas Tech University in
Partial Fulfillment of
the Requirements for the Degree of
Master of Science
Approved
Dr. Ram IyerChair of Committee
Dr. Magdalena Toda
Dr. Eugenio Aulisa
Peggy Gordon Miller
Dean of the Graduate School
August, 2012
7/24/2019 Athukorala Thesis
2/72
c2012, Bhagya U. A. Athukorallage
7/24/2019 Athukorala Thesis
3/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
ACKNOWLEDGMENTS
It is with great pleasure that I express my gratitude and appreciation to myadvisor Dr. Ram Iyer for his encouragement, guidance and patience throughout
this endeavor. Furthermore, his guidance helped enormously for me to succeed as a
graduate student. My sincere gratitude goes to Dr. Magdalena Toda and Dr. Eugenio
Aulisa for their support, suggestions and encouragement. They were always willing
to help me in every way.
I am grateful to Dr. Pantaleon Perera who guided and helped me in every
possible way throughout my academic career. Moreover, I take this opportunity to
express my gratitude to all my teachers during my student life.
I would like to thank all my Texas Tech University friends and Lubbock Sri
Lankan community for their support provided from the day I arrived here. My special
thanks go to Janitha Gunatilake and Josh Engwer for their suggestions and help in
writing the thesis.
Last but not least, I would like to thank my loving parents, sisters and wife for
being with me in every moment in my life.
ii
7/24/2019 Athukorala Thesis
4/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
TABLE OF CONTENTS
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . iiABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
1. INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. CAPILLARY SURFACES . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Surface tension . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 Youngs equation . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.3 Contact angle hysteresis . . . . . . . . . . . . . . . . . . . 7
2.1.4 Young-Laplace Equation . . . . . . . . . . . . . . . . . . . 9
2.1.5 Curvature of a curve and a surface . . . . . . . . . . . . . 10
2.2 Profile of a capillary surface at a vertical flat wall . . . . . . . 13
2.2.1 Modeling the capillary surface at a vertical wall . . . . . . 13
2.2.2 Boundary conditions . . . . . . . . . . . . . . . . . . . . . 15
2.2.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Forces acting on a contact lens . . . . . . . . . . . . . . . . . . 19
2.3.1 Static equilibrium of a contact lens . . . . . . . . . . . . . 203. TEAR MENISCUS AROUND A CONTACT LENS . . . . . . . . . . . 27
3.1 Modeling the tear meniscus around a contact lens . . . . . . . 27
3.2 Two-dimensional analysis of tear meniscus . . . . . . . . . . . 31
3.2.1 Necessary conditions for the equilibrium of the contact lens 34
3.2.2 Numerical results . . . . . . . . . . . . . . . . . . . . . . . 36
3.3 Two-dimensional analysis of a tear meniscus when the disk is
supported by the lower eyelid . . . . . . . . . . . . . . . . . . . 38
3.3.1 Numerical results . . . . . . . . . . . . . . . . . . . . . . . 40
3.4 Two-dimensional analysis of a tear meniscus with cylindrical
shell type contact lens . . . . . . . . . . . . . . . . . . . . . . . 42
3.4.1 Numerical results . . . . . . . . . . . . . . . . . . . . . . . 46
3.4.2 Lower tear meniscus . . . . . . . . . . . . . . . . . . . . . 48
iii
7/24/2019 Athukorala Thesis
5/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.4.2.1 Numerical results . . . . . . . . . . . . . . . . . . . . 48
3.5 Three-dimensional analysis of a tear meniscus with a spherical
cap type contact lens . . . . . . . . . . . . . . . . . . . . . . . 503.5.1 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . 55
3.6 Comparison with observations . . . . . . . . . . . . . . . . . . 58
4. CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
iv
7/24/2019 Athukorala Thesis
6/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
ABSTRACT
In this thesis, we study the capillary surface at a vertical wall, and a tear meniscusaround a symmetric, spherical cap lens. We propose a mathematical model of a
tear meniscus around a contact lens that is at static equilibrium using a calculus of
variations approach. As the lens is in static equilibrium all the forces and moments
sum to zero. The forces acting on the lens are its weight, force due to hydrostatic
and atmospheric pressures and surface tension on the periphery of the lens due to
the tear meniscus. We consider the two cases of presence or absence of a force due to
the lower eyelid. The fixed parameters in the model are weight of the lens, coefficient
of surface tension, magnitude of gravitational acceleration, density of the tear liquid
and physical parameters of the lens such as the diameter and base curve radius. The
adjustable parameters in the model are contact angles of the tear meniscus with
the cornea and contact lens respectively and the position of the lens on the cornea.
Numerical experiments suggest that there exist range of values for the adjustable
parameters that lead to physically reasonable solutions, for lens position; extent of
overlap of the lower lid on the lens; pressure due to the lid on the lens; and contact
angles between the tear meniscus and the cornea and contact lens respectively.
v
7/24/2019 Athukorala Thesis
7/72
7/24/2019 Athukorala Thesis
8/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
LIST OF FIGURES
1.1 Capillary surface at a vertical wall . . . . . . . . . . . . . . . . . . . . 12.1 Attractive interaction of a molecule at the surface and in the middle
of a liquid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Equilibrium contact angle of a liquid drop on a solid surface . . . . . 6
2.3 Interfacial tensions at a contact point of a liquid drop . . . . . . . . . 7
2.4 Advancing and receding contact angles of a liquid drop . . . . . . . . 7
2.5 Sectional view of a liquid column in a capillary tube . . . . . . . . . . 8
2.6 Liquid-gas interface Swith principal radii ofR1 andR2 . . . . . . . . 9
2.7 Normal curvaturee of a surface in R3 . . . . . . . . . . . . . . . . . . 11
2.8 Sectional view of a capillary surface at a vertical wall . . . . . . . . . 14
2.9 The directions of the forces on a section of a capillary surface and
meniscus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.10 Variation of the meniscus heightz(x) from the vertical wall . . . . . . 17
2.11 Image of contact lens resting on the inside of the lower eyelid . . . . . 20
2.12 Case 1: Tear film over a disk . . . . . . . . . . . . . . . . . . . . . . . 21
2.13 Case 2: Contact angle between the tear meniscus and the contact
lens is less than 90 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.14 Case 3: Contact angle between the tear meniscus and the contactlens is equal to 90 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.15 Case 4: Contact angle between the tear meniscus and the contact
lens is greater than 90 . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.16 Case 5: Contact angle between the tear meniscus and the contact
lens is greater than 90 . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Contact lens on a flat cornea . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Upper and lower tear menisci on a rectangular contact lens . . . . . . 31
3.3 Upper tear meniscus on a rectangular contact lens . . . . . . . . . . . 33
3.4 Forces on a section of a rectangular contact lens . . . . . . . . . . . . 35
3.5 Force components in the zdirection . . . . . . . . . . . . . . . . . . . 37
3.6 Images of contact lens resting on the inside of the lower eyelid . . . . 38
3.7 Forces on the lens due to the upper tear meniscus and the lower eyelid 39
vii
7/24/2019 Athukorala Thesis
9/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.8 Variation ofL1, a, b and the reaction forces FL and FR with respect
to the distance x1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.9 A cylindrical shell type lens . . . . . . . . . . . . . . . . . . . . . . . 423.10 Forces on the cylindrical shell type lens due to the upper tear meniscus
and the lower eyelid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.11 Variation of FL, FR and the moment difference with respect to the
distancex1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.12 Variation of lower contact angle values withx1 and Variation of the
force components in the x direction . . . . . . . . . . . . . . . . . . . 49
3.13 Spherical cap type contact lens . . . . . . . . . . . . . . . . . . . . . 50
3.14 Forces acting on the spherical cap . . . . . . . . . . . . . . . . . . . . 52
3.15 Variation of the force due to fluid pressureFR, surface tensionFTand
the lid force FL in the x,y andzdirections . . . . . . . . . . . . . . 56
3.16 Variation ofL for different corneal contact angles . . . . . . . . . . . 57
3.17 Contact angles between the tear meniscus with the flat vertical wall
and corneal surface . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.18 Meniscus profiles z(x) and their slopes z(x) for the contact angles
E= 33 and EC= 14.5 . . . . . . . . . . . . . . . . . . . . . . . . 60
viii
7/24/2019 Athukorala Thesis
10/72
7/24/2019 Athukorala Thesis
11/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
energy is [3]
J =dA pdV. (1.2)In equation (1.2),is the surface energy per unit area and p is the pressure difference
between the liquid-gas interface. dAanddVare the surface area and volume elements
of the liquid respectively. The potential energy functional is
J =
J =
dA
pdV, (1.3)
where is the region occupied by the liquid and is the boundary of . Both
methods result in the same equation for the capillary surface at a vertical wall asshown in section 2.2.
The potential energy functional approach is used to model the tear meniscus
around a symmetric, spherical cap lens in Section 3.1. We analyze the static equi-
librium of the lens by considering all the forces and moments that act on the lens.
Mainly, there are four types of forces. They are lens weight, forces due to hydrostatic
and atmospheric pressure, surface tension forces on the periphery of the lens due to
the tear meniscus and the force due to the lower eyelid. Lens weight acts through its
center of mass, parallel to the direction of gravitational acceleration g. Forces result
from hydrostatic pressure and atmospheric pressure acting perpendicular to the pos-
terior and anterior sides of the lens respectively. Thus, due to the spherical shape of
the contact lens, all these pressure forces and their resultant force have the direction
of the outward normal vector to the sphere. Furthermore, surface tension forces act
on the lens at the contact line and directed tangentially to the tear meniscus. Since
tear film is at equilibrium, its velocity is u and, hence, viscous stress 1 are zero.
Therefore, in our model, we neglect the force on the posterior side of the lens due to
the viscous stress.
We use the lens weight, coefficient of surface tension, density of the tear liquid,
1=
u+ uT2
2
7/24/2019 Athukorala Thesis
12/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
magnitude of gravitational acceleration, lens diameter and its base curve radius as
the fixed parameters. The adjustable parameters in our model are the position of the
lens on the cornea, contact angle of the tear meniscus with the cornea and contactlens respectively. The contact angle hysteresis phenomenon (refer to Section 2.1.3)
explains that these contact angles may have a range of values. Our mathematical
model for the tear meniscus is valid for rigid gas permeable RGP lenses as well as
for the soft contact lenses. However, numerical simulations are done only for the
RGP type lenses. Our numerical calculations show that the pressure change due
to gravity significantly affect the equilibrium equations. In particular, force resultant
due to hydrostatic pressure is greater than the surface tension force in the zdirection.
In addition to ignoring the change in hydrostatic pressure due to gravity, capil-
lary effect is also ignored in [1] and in [18]. These forces are significant and cannot
be ignored as shown in this thesis. The net force due to hydrostatic pressure has the
largest magnitude amongst all the forces acting on a lens and the capillary effect re-
duces the magnitude of the lid (or other) forces needed to maintain static equilibrium.
In the literature [1], the contact lens and tear meniscus are considered to be in
a quasi-static equilibrium state. The author assumes the shape of the contact lens
to be a cylindrical shell type with a unit width. Reaction force due to the posteriortear film, upper and lower contact angles are calculated by considering the quasi-
static equilibrium of the lens in two-dimensions. However, calculation of the reaction
force due to the posterior tear film completely neglects hydrostatic pressure variation
due to gravity. But, our numerical simulations show that the force due to hydrostatic
pressure significantly affects the static equilibrium of the lens. The literature [2] mod-
els the contact lens and the cornea as flat surfaces with infinite width. Lubrication
approximation theory is used to model quasi-steady motion of the tear film under
the contact lens and away from the lens. In the analysis of the the latter tear film,
its attachment to the cornea is incorrectly modeled. As a result, gravitational force
acting on the fluid is neglected in the analysis. In [18], the contact lens considered is
a porous, planar, circular disk, and the authors model the dynamics of the contact
lens during blinking. They use a version of Darcys law to model constitutive relation
3
7/24/2019 Athukorala Thesis
13/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
of tear, in which gravity is neglected. For the no blink or quasi-static blink case, this
constitutive relation yields a constant pressure distribution in the tear layer, which is
unphysical.
In our analysis, we consider the static equilibrium of a spherical lens in three-
dimensions by introducing an additional force that results from the lower eyelid.
Effect of hydrostatic pressure includes in the equilibrium equations of the lens. We
assume the pressure variation of the tear film is linear with the distance x and also
assume linear variations of the contact angles of the tear meniscus with the lens.
Ranges of values for the adjustable parameters are obtained through the numerical
simulations for the static equilibrium of the lens.
Chapter 2 consists of the basic theories involving a study of capillary surfaces and
model the capillary surface at a vertical wall by applying the Young-Laplace equation
and a calculus of variations approach. This chapter also contains an analysis for the
stability of a unit width plate that the axis of symmetry is parallel to the direction
of gravitational acceleration g. In chapter 3, we mathematically model the tear
meniscus around a contact lens. We initially consider the static equilibrium of a flat
plate and cylindrical shell that yield to gain a better understanding of the stability of
a spherical cap type lens. Finally, for the equilibrium of the spherical cap type lens,numerical simulations are carried out to obtain the feasible values for the adjustable
parameters. Simulation results suggest that there exist a range of values for the
adjustable parameters that lead to the physically reasonable solutions.
4
7/24/2019 Athukorala Thesis
14/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
CHAPTER 2
CAPILLARY SURFACES
In this chapter, the basic definitions and theorems that we used to analyze menis-
cus profiles at a flat vertical wall and around a disk are described. In particular, we
derive an equation for a meniscus profile at a vertical wall using the Laplace theorem.
2.1 Preliminaries
2.1.1 Surface tension
Surface tension of a liquid is defined as the energy that must be required to
increase the surface by one unit[3].
Figure 2.1: Attractive interaction of a molecule at the surface and in the middle of aliquid.
The unit of surface tension is either J/m2 or N/m. Surface tension of liquids
vary from 0.02 to 0.08N/mand, therefore, they are usually expressed inmN/m. The
following table contains surface tension of a few liquids at different temperatures [9].
Table 2.1: Surface tension of some liquids at different temperatures [9].
Liquid Temperature (C) (mNm1)
Water 20 73100 58
Tear - 45
Mercury 20 485Acetone 20 24Water/oil 20 50
5
7/24/2019 Athukorala Thesis
15/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
2.1.2 Youngs equation
Consider a static equilibrium of a liquid drop that is deposited on an ideal1 solid
surface. LetO be a point on the contact line that forms in the solid, liquid and airinterface. Let Mbe a plane perpendicular to the solid surface and parallel to the
Y Zplane through the point O. Then, the liquid drop forms a profile curve OC on
the plane Mas shown in Figure 2.2. Line OB represents a tangent line to the curve
OC at the point O. The AOB that forms at the point O through the liquid is
denoted byE. This angle is referred to as an equilibrium contact angleand its value
is determined by the Youngs equation.
Figure 2.2: Equilibrium contact angle of a liquid drop on a solid surface. Mis a planeparallel to the Y Zplane. AOB is the equilibrium contact angle E.
Figure 2.3 depicts the directions of interfacial tensions between the solid-vapor,
solid-liquid and liquid-vapor interfaces on the plane M. Those interfacial tensions are
assumed to have the values ofSG , SL and LG (per unit length) respectively.
The equilibrium of forces in the Y direction results in the following equation
(2.1) and the value ofEis found from the equation(2.2).
LGcos E+SL = SG , (2.1)
LGcos E = SG SL,E = cos
1
SG SLLG
. (2.2)
1An ideal solid surface is one that is flat, rigid, perfectly smooth, inert, non-porous and chemicallyhomogeneous with zero contact angle hysteresis [10].
6
7/24/2019 Athukorala Thesis
16/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 2.3: Interfacial tensions at a contact point of a liquid drop.
2.1.3 Contact angle hysteresis
The equilibrium contact angle Ethat is defined by the Youngs formula is not
unique for a non-ideal surface.
Figure 2.4: Advancing and receding contact angles of a liquid drop.
Consider a small liquid drop on a solid surface with a contact angle of (Con-
figuration of the contact angle is similar to that used in the previous analysis).
Experiments show that if liquid is carefully removed from a droplet with a syringe,
volume and contact angle of droplet decrease without changing its initial contact area.
Continuing this process results in a receding of the contact area at a contact angle
ofR. Similarly, if liquid is added to the droplet, the volume and contact angle of
the droplet will increase, but retain the same contact area. Further increasing of its
volume results in a motion of the contact area at contact angle of A. These two
limiting values, R and A, are referred to as receding and advancing angles. The
difference betweenA andR is termed ascontact angle hysteresis.
The following example indicates the contact angle hysteresis phenomenon that
occurs in a capillary tube.
7
7/24/2019 Athukorala Thesis
17/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Consider a liquid column trapped in a capillary tube [3] that is parallel to the Z
direction as shown in the figure 2.5. Magnitude of the gravitational acceleration is
denoted by g and it is directed to theZ direction. The liquid column has heighth and radius R with liquid density of . Its upper and lower lines of contact2 are
denoted byC1 andC2 respectively. On the lines C1 andC2, the contact angles are 1
and2 and it is assumed that each contact angle is constant along the corresponding
contact line.
Figure 2.5: Sectional view of a liquid column in a capillary tube. 1 and 2 denote
the upper and lower contact angles respectively. Gravity g acts in theZdirection.
Under this configuration, surface tension acts tangentially to the upper and
lower capillary surfaces of the liquid column. Let A and B be arbitrary points on
the contact lines C1 and C2 respectively. Thus at the point A, surface tension force
acts tangentially to the upper liquid meniscus. Hence, its vertical component is
cos 1 inZdirection. Similarly, at the point B, there is a force component cos 2,
that acts in theZ direction. Therefore, the total forces in Z andZ directionsdue to the upper and lower contact lines are 2Rcos 1and 2Rcos 2respectively.
Moreover, the weight of the liquid column, R2hg acts inZdirection.
Thus, the following equations can be derived for static equilibrium of the liquid
2In three dimensions, these lines are circles with radius R.
8
7/24/2019 Athukorala Thesis
18/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
column in the Zdirection:
2R(cos 1 cos 2) R2
hg = 0,2(cos 1 cos 2) = Rgh. (2.3)
Thus, at the equilibrium of the liquid column, the upper and the lower contact
angles satisfy the condition,
R 1 < 2 A. (2.4)
2.1.4 Young-Laplace Equation
Consider a liquid-gas interface (capillary surface3) that is in equilibrium. Supposethere is a pressure difference across the liquid-gas interface. Then, the interface is
curved due to that pressure difference. The aforementioned pressure difference is
related to curvature and surface tension of the interface, and this relationship is given
by the Young-Laplace equation.
Figure 2.6: Liquid-gas interfaceSwith principal radii ofR1 andR2.
3The term capillary surface is used to describe a free interface that occurs when one of thematerials is a liquid and the other is a liquid or a gas [11].
9
7/24/2019 Athukorala Thesis
19/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Young-Laplace equation:
Let Sbe a fluid interface as described above with surface tension and pressure
difference across a point A on the surface,p. Then,
p =
1
R1+
1
R2
=(1+2) (2.5)
whereR1 andR2 represent the two principal radii of curvature at the point A. Note
that we define the pressure difference p to be pliquid pgas.
One of the important implications of the Young-Laplace equation is that one can
use it with appropriate boundary conditions to calculate the geometry of a capillary
surface. In the next section, the principal radii of curvature of a surface are discussed
in detail.
2.1.5 Curvature of a curve and a surface
Curvature of a curve in R3
LetCbe a curve, parametrized byr(t) in R3 such thatr(t) = 0 fort (a, b) R.We define its arc length parameter (s) by the equation,
s(t) =
t
a
r()d. (2.6)
Thus, unit tangent vector (T) of the curve C is defined in terms of the arc length
parameters:
T : =dr
ds, (2.7)
which leads to
T= dr
dtdtds
= r(t)r(t) . (2.8)
Note thatT = 1.Therefore, we can show that T dT
ds= 0. Hence,
dT
ds is orthogonal to T.
10
7/24/2019 Athukorala Thesis
20/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
The curvature (s), of a curve Cis defined by [12],
dT
ds =(s)n(s). (2.9)
In the above equation, n(s) is the principal unit normalto the curve C. The radius
of curvature R is the reciprocal of(s). The plane spanned by Tand nis called the
osculating plane.
Furthermore, may be expressed in terms of the original parameter t as given in the
equation:
=r(t) r(t)
r(t)
3
. (2.10)
Curvature of a surface in R3
LetSbe a curved surface in three dimensions and Nbe the unit surface normal
through a pointAonS. Consider a tangent plane,TASthrough the pointA. We con-
sider all the planes perpendicular toTASthrough the surface normal N. Intersections
of these planes with the surface Sresult in a family of curves,{Ci}.
Figure 2.7: Normal curvaturee of a surface in R3. 1 and 2 denote the principal
curvatures at the point A. N represents the surface normal at A.
Note that the each tangent direction corresponds to one of the {Ci} at the pointA. The curvature of each such curve corresponding to the direction u in the tangent
plane is called the normal curvature, n(u) in the direction u. The value of the
11
7/24/2019 Athukorala Thesis
21/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
normal curvature is
n= n N, (2.11)and nis defined by the equation (2.9).
The maximum and minimum values of the normal curvature are called the principal
curvaturesand are denoted by 1 and 2 respectively. The corresponding directions
of1 and 2 are the principal directions e1 and e2. Furthermore, reciprocals of the
1 and2 are the principal radii of curvaturesand denoted byR1 and R2.
Subsequently, the product and the average of 1 and 2 are defined as the Gauss
curvature (K) and the Mean curvature (H) of a surface. Thus,
H = 1+2
2 ,
K = 12. (2.12)
12
7/24/2019 Athukorala Thesis
22/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
2.2 Profile of a capillary surface at a vertical flat wall
2.2.1 Modeling the capillary surface at a vertical wall
The following analysis of the capillary surface at a vertical wall may be found in[3]. We consider a liquid in static equilibrium that is uniform in the y direction. The
Xaxis of the coordinate system is configured so that the meniscus has zero curvature
at z= 0 as x . For simplicity, we have placed the Zaxis on the vertical wall.LetMbe a plane parallel to the X Zplane andA be a point on the capillary surface
as depicted in the figure 2.8. Outer pressure and internal pressure at the point A
are denoted by po and piA. We assume that the point A has coordinates (x, z(x))
with respect to the given coordinate system. T and n represent the tangent plane
and the normal at the point A respectively. Let M2 be a plane through the normal
n perpendicular to both M and T. Radii of curvature for the meniscus are defined
using the lines of intersection that result from intersection of the planes M and M2
through the meniscus. These lines of intersections are denoted by C1 and C2. In
particular, C2 is a straight line and, therefore, its curvature is zero. Note that the
curve C1 coincides with the capillary surface that is given by the equation z=z(x).
We represent the the curve C1 as a parametrization,
r(x) = (x, y0, z(x)), (2.13)
wherey0 is a constant.
By using equations (2.10) and (2.13), we determine the curvature of the curve
C1. Thus,
r(x) = (1, 0, z(x)),
r(x) = (0, 0, z(x)),
C1 = z(x)
[1 +z(x)2]3
2
. (2.14)
We apply the Young-Laplace equation to the point A to determine the geometry
13
7/24/2019 Athukorala Thesis
23/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 2.8: Sectional view of a capillary surface at a vertical wall. Gravity g acts intheZdirection.
of the capillary surface (meniscus profile), which results in the following equation,
piA po =
1
R1+
1
R2
, (2.15)
= z(x)
(1 +z(x)2)3
2
. (2.16)
Curvature of the meniscus at infinity is zero as mentioned above. Then, the Young-Laplace equation implies that the internal pressure is equal to the outer pressure (po)
at a point at infinity. Thus, the liquid on the Xaxis has a pressure po. We derive
an equation for hydrostatic pressure at point B (piB) that has the coordinates (x, 0).
Then,
piA+gz(x) =piB =po. (2.17)
Use equations (2.16) and (2.17) to determine the equation for the meniscus profile,
gz(x) =
z(x)
[1 +z(x)2] 32 . (2.18)
14
7/24/2019 Athukorala Thesis
24/72
7/24/2019 Athukorala Thesis
25/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
angle E.
z =
2(1 sin )g ,
z|x=0 =
2(1 sin E)g
. (2.21)
Furthermore, the boundary condition for z|x=0 is obtained from the slope of thetangent line that is drawn to the meniscus at x= 0,
z|x=0 = cot E. (2.22)
2.2.3 Results
In this section, we numerically solve the meniscus profile equation (2.18) with
the boundary conditions that are derived in equations (2.21) and (2.22).
Consequently, we have the following initial value problem:
gz(x) = z(x)
[1 +z(x)2]3
2
, (2.23)
with the initial conditions
z(0) =
2(1 sin E)
g , z(0) = cot E. (2.24)
We obtain a corresponding system of first order differential equations by introducing
new variables,
y1 = z, y2= z.
Which leads to
y1 = y2
y2 = g
y1(1 +y
22)
3
2 , (2.25)
16
7/24/2019 Athukorala Thesis
26/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
with
y1(0) =2(1 sin E)g , y2(0) = cot E. (2.26)
The system of equations (2.25) are solved using the fourth-order Runge-Kutta
method. Parameter values that use for the numerical calculations are given in the
following table.
Table 2.2: Fixed parameter values [17].
Parameter Value CGS units
1 g/cm3
g 981 cm/s2
45 dyn cmE 25 deg
0 1 2 3 4 50
0.05
0.1
0.15
0.2
0.25
Distance from the vertical wall (cm)
Meniscusheight(cm)
Figure 2.10: Variation of the meniscus height z(x) from the vertical wall.
Next, we model the same capillary surface that was depicted in Figure 2.8, byusing a calculus of variations approach. Consider the differential form of the potential
energy [3] that is given by the equation,
J =dA pdV . (2.27)
17
7/24/2019 Athukorala Thesis
27/72
7/24/2019 Athukorala Thesis
28/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
the vertical wall,
z(x)
[1 +z(x)2]3
2
=gz(x). (2.34)
Thus, we obtain the same equation for the capillary surface using the Young-Laplace
equationand using a calculus of variations approach.
We use the latter method to derive an equation for the tear meniscus around a
contact lens.
2.3 Forces acting on a contact lens
There are three types of forces that mainly act on a contact lens to hold it on
the cornea. They are: weight of the lens, fluid forces, and force due to the eye lids.
Lens weight: Lens weight has become a critical factor since the magnitude of thegravitational force is proportional to its weight. The following table contains the
different types of materials and their specific gravities that are used to design
contact lenses.
Table 2.3: Contact lens materials and their specific gravities [8].
Material Density (g/cm3) Material Density (g/cm3)
PMMA 1.18 Polycon 1.15Boston RxD 1.27 Boston II 1.13Airlens 0.99 Equalens 1.19
Fluid forces: When a contact lens is placed on the cornea, the tear meniscusformed on the peripheral of the lens and the thin layer of tear is present in
between the cornea and posterior side of the lens. Due to the previously men-
tioned peripheral tear meniscus, surface tension forces act on the lens at the
contact line and directed tangentially to the meniscus surface. Moreover, pres-sure reaction forces act perpendicular to the posterior and anterior sides of the
lens due to the build-up pressure in the tear and atmospheric pressure, patm.
Force due to the eyelid: In this research, we analyze the static equilibrium of acontact lens. Hence, we consider only the force due to the lower eyelid (refer to
19
7/24/2019 Athukorala Thesis
29/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 2.11).
Figure 2.11: Image of contact lens resting on the inside of the lower eyelid.
2.3.1 Static equilibrium of a contact lens
In the literature [1], the contact lens and tear meniscus are considered to be in
a quasi-static equilibrium state. The author assumes the shape of the contact lens
to be a cylindrical shell type with a unit width. Reaction force due to the posterior
tear film, upper and lower contact angles are calculated by considering the quasi-
static equilibrium of the lens in two-dimensions. However, calculation of the reaction
force due to the posterior tear film completely neglects hydrostatic pressure variationdue to gravity. But, our numerical simulations show that the force due to hydrostatic
pressure significantly affects the static equilibrium of the lens. The literature [2] mod-
els the contact lens and the cornea as flat surfaces with infinite width. Lubrication
approximation theory is used to model quasi-steady motion of the tear film under
the contact lens and away from the lens. In the analysis of the the latter tear film,
its attachment to the cornea is incorrectly modeled. As a result, gravitational force
acting on the fluid is neglected in the analysis. In [18], the contact lens considered is
a porous, planar, circular disk, and the authors model the dynamics of the contact
lens during blinking. They use a version of Darcys law to model constitutive relation
of tear, in which gravity is neglected. For the no blink or quasi-static blink case, this
constitutive relation yields a constant pressure distribution in the tear layer, which is
unphysical.
20
7/24/2019 Athukorala Thesis
30/72
7/24/2019 Athukorala Thesis
31/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
point B implies piB < patm. Thus, piA > piB.
However, hydrostatic pressure at the point B is given by,
piB =piA+ghAB,
which implies piB > piA and this contradicts the previous conclusion. Hence, there
cannot be a film over the disk.
Static equilibrium inZdirection of the disk is analyzed with respect to the value
of contact angle . In particular, we consider 90.
Case 2: Liquid meniscus with a contact angle
7/24/2019 Athukorala Thesis
32/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
which simplifies to
2cos +dhllg = (piCpo)d. (2.36)In equation (2.35), m and piC represent mass of the disk and pressure at the point
C. Thus, stability inZdirection can be achieved only ifpiC > po and, hence, this
condition is necessary for existence of a liquid film under the disk.
However, according to the configuration of the X axis, meniscus has a zero
curvature on it. From the Young-Laplace equation, fluid pressure on the Xaxis is
equal to the outer pressure po. We derive a formula for hydrostatic pressure at point
C:
po = piC+tgh. (2.37)
Equation (2.37) implies piC < po and, therefore, stability in the Zdirection is
not possible with
7/24/2019 Athukorala Thesis
33/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Static equilibrium of forces on the disk in the Z direction results in an equa-
tion similar to (2.36). Since = 90, the surface tension force component of the
aforementioned equation becomes zero. We obtain,
lhldg = (piCpo)d (2.38)
where piCdenotes pressure at the point Cand is expressed in terms of hydrostatic
pressure,
piC=po+tgh. (2.39)
piCachieves its maximum value at max{h} =hl, which leads topiC|max= po+tghl. (2.40)
Substituting equation (2.40) into equation (2.38) yields
lhldg = thldg,
which turns out to be
l = t. (2.41)
The above equation (2.41) implies that ift l then liquid film exists in betweenthe disk and the surface.
Case 4: Liquid meniscus with a contact angle >90.
Consider the case in which contact angle >90. Configuration of the coordinate
system is similar to that of the preceding case. Furthermore, the Z axis intersects
the bottom edge of the disk at a point C, (0, h).
Thus, we can formulate a static equilibrium equation in Zdirection:
2cos( ) + (piCpo)dmg = 0 2cos( ) + (piCpo)d = mg, (2.42)
24
7/24/2019 Athukorala Thesis
34/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 2.15: Case 4: Contact angle between the tear meniscus and the contact lensis greater than 90. Gravityg acts along the Zdirection.
which simplifies to
2cos( ) + (piCpo)d = dhllg. (2.43)
We obtain a formula for piCusing hydrostatic pressure that turns out to be
piC=po+tgh. (2.44)
Combine equations (2.43) and (2.44) to formulate the following equation
2cos( ) +tghd = dhllg, (2.45)
which simplifies to
2cos( ) = (lhl th)dg. (2.46)
Equation (2.46) shows that stability in the Z direction may be possible for a lens
made out of hydrophobic material. However, the literature [22] shows that lens ma-
terials always have the hydrophilic property.
Case 5: Liquid meniscus with a contact angle >90 and gravity g acts along the
Xdirection.
We consider a disk that has a contact angle > 90 in a vertical position as
25
7/24/2019 Athukorala Thesis
35/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
depicted in the Figure 2.16. Since >90 around the lens, curvature of the meniscus
is positive. Thus,
pi(x)> po x x1.
Hence, force due to hydrostatic pressure acts in the zdirection as well as the surface
tension forces. Due to this reason, stability in the zdirection cannot be achieved with
this configuration.
Figure 2.16: Case 5: Contact angle between the tear meniscus and the contact lensis greater than 90. Gravity g acts along the Xdirection.
Contact angle less than 90 with gravity g acting perpendicular to the axis of
symmetry is considered in chapter 3.
26
7/24/2019 Athukorala Thesis
36/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
CHAPTER 3
TEAR MENISCUS AROUND A CONTACT LENS
3.1 Modeling the tear meniscus around a contact lens
In this endeavor, tear meniscus is considered that forms between the cornea
and a contact lens. In the Cartesian coordinate system shown in Figure 3.1, the
domains bounded by the contact lens and tear meniscus are 1 and 2 respectively.
Furthermore, the contact line formed between the lens and the meniscus is denoted
by12. Inner and outer profiles of a contact lens have the equations Fi(x, y) and
Fo(x, y) respectively. Moreover, we introduce a rotational motion of the contact lens
around the y axis by adding a linear function, z(x) = mx+ b. Let the pressure
developed inside the tear meniscus be pi(x,y,z) and the profile of the tear meniscus
bez= f(x, y). Finally, atmospheric (outer) pressure,patmis assumed to be a constant
throughout the domains.
Figure 3.1: Contact lens on a cornea. g acts along the X direction. Tear pressureand atmospheric pressure are pi and po respectively. Domain of the lens is 1 andthe domain of the tear meniscus is 2.
We consider the differential form of the energy functional, Jthat is given by
J =dA pdV, (3.1)
27
7/24/2019 Athukorala Thesis
37/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
where is the surface energy per unit area of liquid, p is the pressure difference
between inside and outside of medium, dA and dV are surface area and volume
elements of a liquid respectively. Surface energy per unit area is taken to be a constantin a given domain. Consider the potential function which is defined by equation (3.1).
Then total energy of the system is given by
J =2
dA 2
p2(x,y,z)dVt 1
p1(x,y,z)dVt 1
cgxdVl, (3.2)
where subscripts t and l refer to the quantities involving tear and lens. c is the
density of the lens and g is the magnitude of gravitational acceleration. The term
1 cgxdVl in equation (3.2) is the potential energy of the contact lens.Consider the Cauchy momentum equation [7]:
Du
Dt =g p+ , (3.3)
where=
u +uT2
.
In equation (3.3) and denote the density and the viscosity of the fluid. Further-
more, u and are the velocity of the fluid and its viscous stress. g is the vector
(g, 0, 0)T whereg represents the magnitude of the gravitational acceleration. is thegradiant operator in three-dimensions and DDt is the operator
t + u .
For a static Newtonian fluid, the above equation can be simplified to
p(x,y,z) =g. (3.4)
Solutions of equation (3.4) for p(x,y,z) yields a function p(x) that is dependent on
x alone:
p(x) =gx +pi0, (3.5)
whereg is the gravitational constant and pi0 = p|x=0.
28
7/24/2019 Athukorala Thesis
38/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Thus, pressure difference between inside and outside of the medium is
p = p(x)patm,= tgx+pi0 patm. (3.6)
According to the given configuration of the coordinate system, any point on the
capillary surface can be described by the parameterization,
r(x, y) = (x,y,f(x, y)). (3.7)
Then, surface area, A of a given domain is
A =
rxrydxdy,
=
1 +f2x + f
2y dxdy. (3.8)
Substitute equations (3.6) and (3.8) into equation (3.2) leads to
J(f, m) = 2
1 +f2x + f
2y dxdy
2
[(tgx+p0 patm)f(x, y)]dxdy
1
(tgx+pi0 patm)(Fi(x, y) +mx+b)dxdy
1
cgx[Fo(x, y) Fi(x, y)]dxdy, (3.9)
subject to the constraint
f(x, y) =Fi(x, y) +mx+b (x, y) 12. (3.10)
29
7/24/2019 Athukorala Thesis
39/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Thus, the modified functional:
J(f,m,) = 1
(tgx+pi0 patm)(Fi+mx+b) +cgx(Fo Fi) dxdy(f(x, y) Fi(x, y)mx b)+
2
1 +f2x + f2y (tgx+pi0 patm)f(x, y)
dxdy, (3.11)
whererepresents the Lagrange multiplier.
Equation (3.11) has the form
J(f,m,) = 1
L1(x,y,m)dxdy+ 2
L2(x, y, f , f x, fy)dxdy. (3.12)
For simplicity of analysis, we consider m and b to be fixed. These are the cases we
consider in the rest of the thesis.
Thus, associated Euler - Lagrange equation of equation (3.12) results,
L2f
x
L2fx
y
L2fy
= 0, (3.13)
Simplifying the equations (3.13) yields,
patm p0 tgx
= (1 +fy
2)fxx+ (1 +fx2)fyy 2fxfyfxy
(1 +fx2 +fy
2)3
2
. (3.14)
30
7/24/2019 Athukorala Thesis
40/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.2 Two-dimensional analysis of tear meniscus
We begin our study by considering the idealized case of a flat and rectangular
contact lens of unit width, and a flat corneal wall. Consider equation (3.14) that isderived in the previous section for the meniscus profile. The meniscus profile depends
on the x variable only.
Let z= f(x). Then, equation (3.14) is reduced to
patm pi(0) tgx
= fxx
(1 +fx2)
3
2
(3.15)
Figure 3.2: The upper and lower tear menisci on a section of a contact lens for the
idealized case when the cornea and the contact lens are flat, and the contact lensis rectangular. The angle of tilt of the lens is . C1 and C2 denote the contactangle on the upper and lower cornea respectively. L1 and L2 represent the upperand the lower contact angle between the tear meniscus and the contact lens. FR isthe resultant force due to the fluid pressure on the posterior and anterior sides of thelens.
31
7/24/2019 Athukorala Thesis
41/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Upper meniscus profileEquation for the upper meniscus profile is,
patm pi(0) tgx
= fxx
(1 +fx2)
3
2
, (3.16)
with the boundary conditions,f(0) = 0 andfx(0) = tan C1.
Convert the equation (3.16) in to a first order system of ODE results,
y
1 = y2, (3.17)
y
2 = (1 +y22)
3/2
patm pi(0) gx
. (3.18)
Moreover, equation (3.18) has the form
y
2 = (1 + y22)
3/2(k cx) (3.19)
wherek =patm pi(0)
and c =
g
,
which leads to
dy2
(1 +y22)3/2
= (k cx)dx. (3.20)Use the substitutiony2= tan . Then equation (3.20) simplifies to
cos d =
(k cx)dx (3.21)
and has the solution
sin(tan1 y2) =kx cx2
2 +C0. (3.22)
The value ofC0 in equation (3.22) is determined using the boundary condition,y2(0) =fx(0) = tan C1.
32
7/24/2019 Athukorala Thesis
42/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Thus,
y2(x) = tan
sin1
kx cx2
2 + sin C1
, (3.23)
y1(x) =
tan
sin1
kx cx
2
2 + sin C1
dx (3.24)
Recall that k = patm pi0
, c =
g
and y2(x) = fx = tan where is the
angle depicted in figure 3.3 and its value is given by
= tan1 y2= sin1
kx cx
2
2 + sin C1
. (3.25)
Figure 3.3: Upper tear meniscus profile, z = f(x), on the rectangular contact lens
when the cornea and the contact lens are flat. Gravity g acts in the x direction.h1 is the angle between the tear meniscus and an axis parallel to the z axis, andh1=
2 .
Since [0, 2
], equation (3.25) implies
0 kx cx2
2 + sin C1 1
0 cx2 2kx+ 2(1 sin C1) 2. (3.26)
Consider the compound inequality in equation (3.26).
1.
cx2 2kx + 2(1 sin C1) 0 x 0 0
33
7/24/2019 Athukorala Thesis
43/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
k2 2c(1 sin C1) 0
k
2g(1 sin C1)
x 0, pi(0) patm
2g(1 sin C1). (3.27)
2.
2 cx2 2kx + 2(1 sin C1)0 cx2 2kx 2sin C1= g(x) (3.28)
Since c > 0, graph ofg(x) is convex. Thus, in order to satisfy equation
(3.28), x [x1, x2].
x1=k k2 + 2 sin C1
c and x2 =
k+
k2 + 2 sin C1c
. (3.29)
Sincex1 < 0 andx2> 0 from [0, x2] we have the required inequality.
3.2.1 Necessary conditions for the equilibrium of the contact lens
We consider a contact lens that has a weight ofWand diameter ofd units. Let
the resulted force due to hydrostatic pressure be denoted by FR, and it acts on theposterior side of the lens with an distance ofb units from the upper edge of the lens.
Angle is the tilting angle of the lens with respect to the x axis. Upper and lower
contact angles are denoted by L1 and L2 respectively. Moreover, we assume that
distance from the posterior surface of the disk to the contact points of the upper and
lower tear menisci have same value.
For the equilibrium of the lens, we study the force balance in the x and zdirec-
tions and the moment balance about the point A.
Force balance equation in the x direction:(sin h1 sin h2) +FRsin = W. (3.30)
34
7/24/2019 Athukorala Thesis
44/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 3.4: This figure illustrates the forces on a section of a contact lens for theidealized case when the cornea and the contact lens are flat, and the contact lens isrectangular. Surface tension is the force per unit length. The upper and the lowercontact angles are L1 and L2 respectively. Resultant force due to the fluid pressureis FR and it acts on the posterior side of the lens at distance a from the bottomsurface of the lens. Height of the lens is d.
Thus,
h2 = sin1sin h1+FRsin W . (3.31)
Hence,L2 (refer to Figure 3.4) may be found using equation (3.31).
Force balance equation in the zdirection:
(cos h1+ cos h2) =FRcos (3.32)
where
FR = 1
cos
x2x1
(pi(x) patm)dx
= d
2[2(pi(0)patm) +tg(2x1+d cos )]. (3.33)
35
7/24/2019 Athukorala Thesis
45/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Moment balance equation with respect to point B:
FRa = x2x1
(x2
x)[pi(x)
patm]
cos2 dx
a = d(pi(0)patm) + tgd3 (3x1+d cos )
2(pi(0)patm) +tg(2x1+d cos ) (3.34)
Moment balance equation with respect to point A:
W d sin
2 +cos L2d= FRb (3.35)
3.2.2 Numerical results
Values ofh1 are numerically calculated using equation (3.25) and the condition
h1 = 2 . Corresponding h2 values are obtained using the equation (3.31) with
the conditions that are derived in equations (3.27) and (3.29). Parameter values that
are used in the numerical calculation are given in Table 3 .1.
Table 3.1: Fixed parameter values for the idealized case when the cornea and the con-tact lens are flat, and the contact lens has a rectangular shape. The values of{,g,},{C1},{d, W}and{min, max}may be found in [1], [16], [17], and [22] respectively.
Parameter Value CGS units Parameter Value CGS units 1 g/cm3 d 0.9 cmg 981 cm/s2 W 0.02g dyn 45 dyn cm patm 10
6 dyn/cm2
C1 25 deg [min, max] [10, 50] deg
Finally, in order to the verify the necessary condition given in equation (3.32),
we calculate the difference, e = FRcos (cos h1+ cos h2).As shown in Figure 3.5, the e increases with the x values. That is, the force
component due to hydrostatic pressure dominates the surface tension forces. Hence,it is not feasible to achieve the equilibrium in the z direction with the configuration
shown in Figure 3.2.
36
7/24/2019 Athukorala Thesis
46/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
0.045 0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.09550
100
150
200
250
300
Distance,x1 (cm)
Forcecomponentsinthezfirection
(dyn)
FRz
(cos h1+ cos h2)
Difference
Figure 3.5: Force components in the zdirection. FRz is the resultant force componentin the zdirection due to the liquid pressure on the lens. (cos h1+ cos h2) denotesthe only force component in thez direction. This force component results fromthe surface tension forces on the lens. The difference between the above mentionedcomponents is positive for all feasible x1 values.
37
7/24/2019 Athukorala Thesis
47/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.3 Two-dimensional analysis of a tear meniscus when the disk is supported by the
lower eyelid
In this section, we continue our analysis of the idealized case of a flat, rectangularlens on a flat cornea with the additional caveat that the lens is resting on the inside
of the lower eyelid. Our hypothesis is verified by Figure 3.6 which shows images of
rigid gas permeable (RGP) lens on a cornea.
As a consequence, a force acts on the lens due to the lower eyelid. The magnitude of
Figure 3.6: Images of contact lens resting on the inside of the lower eyelid. The headsof the wearers are in the upright position in the images.
this force isFL and it makes and angle with respect to the axis as shown in Figure
(3.7). We assume the location ofFL acting on the lens has distance l from the upperedge of the lens. Let FR be the resultant force due to the liquid pressure on the lens.
h1 is the angle between the upper tear meniscus and an axis parallel to the zaxis.
Weight of the unit width plate is W.
In order to find the location, magnitude and the angle that FL acts, we analyze the
force balance in the x and y directions and the moment balance with respect to the
point A.
Those equations are given by,
sin h1+FRsin +FLcos = W , (3.36)
cos h1+FLsin = FRcos , (3.37)
W d sin
2 +FLsin l cos = FR(d a) +FLcos l sin , (3.38)
38
7/24/2019 Athukorala Thesis
48/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 3.7: Forces on the lens due to the upper tear meniscus and the lower eyelid.Magnitude of the lower eyelid force is FL and gravity g acts along thex direction. ais the distance to the FR from the lower edge of the lens. Angle between FL and anaxis parallel to the xaxis is .
and the expression for FR is given by equation (3.33).
We calculate the distance a using the moment of the disk due to hydrostatic pressure
force with its resultant force FR about point B that yields,
FRa =
x2x1
(x2 x)[pi(x)patm]cos2
dx
a = d(pi(0)patm) + tgd3 (3x1+d cos )
2(pi(0)patm) +tg(2x1+d cos ) (3.39)
Moreover, the following expressions are found using the equations (3.36), (3.37) and
(3.38) for FL, andl respectively.
FL = (FRcos cos h1)2 + (W
sin h1
FRsin )2. (3.40)
= tan1
FRcos cos h1W sin h1 FRsin
. (3.41)
l =Wd sin
2 FRb
Wsin +cos L1 FR . (3.42)
39
7/24/2019 Athukorala Thesis
49/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.3.1 Numerical results
Possible contact angles for the upper tear meniscus are numerically calculated
using equation (3.25) with the conditions, h1 = 2 and L1 =h1+ where L1
denotes the contact angle between the upper tear meniscus and the lens. Maximum
possible overlap distance for the lower eyelid is obtained by measuring from Figure
1(E)[14]. It has an approximate value of 0.27mm. According to this criteria, we have
selected feasible l values and corresponding L1, FL,FR and a values.
Parameter values that are used in this numerical calculation are given in Table 3 .2.
Figure 3.8 that follows depicts the variation ofL1,a,dl= b,FLandFRwith respect
Table 3.2: Fixed parameter values.
Parameter Value CGS units Parameter Value CGS units
1 g/cm3 d 0.9 cmg 981 cm/s2 W 0.02g dyn 62 dyn cm patm 10
6 dyn/cm2
0 deg [min, max] [10, 50] deg
to the distance x1 for the corneal contact angle of 25. Figure 3.8(a) indicates the
possible contact angles for the upper tear meniscus. Since the values ofFR depend
on hydrostatic pressure, as x1 increases the corresponding FR value also increases.
Thus, in order to balance the effect ofFR, force FL increases with x1.
40
7/24/2019 Athukorala Thesis
50/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
0.06 0.065 0.07 0.075 0.08 0 .085 0 .090
0.005
0.01
0.015
0.02
0.025
0.03
Distance,x1 (cm)
b (cm)
(c)
0.06 0.065 0.07 0.075 0.08 0.085 0.09170
180
190
200
210
220
230
240
Distance,x1 (cm)
F (dyn)
(d)
0.06 0.065 0.07 0.075 0.08 0 .085 0 .0943
44
45
46
47
48
49
Distance,x1 (cm)
L (deg)
(a)
0.06 0.065 0.07 0.075 0.08 0.085 0.090.17
0.175
0.18
0.185
0.19
0.195
0.2
Distance,x1 (cm)
a(cm)
(b)
FL
FR
Figure 3.8: Variation ofL1,a,band the reaction forcesFLandFRwith respect to thedistance x1. (a) Possible contact angles for the upper tear meniscus with differentx1 values. (b) Increasing the length of the upper tear meniscus x1 yields the disktoward the lower eyelid and, hence, the distance b also increases with x1. (d) For
all x1 values, the lower eyelid force FL is less than the resultant force FR due to theliquid pressure.
41
7/24/2019 Athukorala Thesis
51/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.4 Two-dimensional analysis of a tear meniscus with cylindrical shell type contact
lens
In this section, lens geometry is assumed to be a cylindrical shell that has a unitwidth. First, we model the lens and upper tear meniscus system with a lower eyelid
force,FL. Then, analysis is extended to the system that has a lower tear meniscus.
The radius and thickness of the cylindrical shell are assumed to be R and t respec-
tively. Moreover, the open angle of the shell has a value of 2. The center of the
circular cylindrical shell is denoted byO (refer to Figure 3.9).
Figure 3.9: A cylindrical shell type lens. The radius and thickness of the circularshell are R and t respectively. Shell has weightW and coordinates of the centroidare (Rc, c). Apex angle of the cylindrical shell is 2.
Next, the centroid of the shell is located based on its moment about the x axis
and the axis of symmetry of the shell. Let us assume that the centroid has the
coordinates (Rc, c, ) with respect to the axis of symmetry of the shell. We consider
a circular sector on the shell that has an angle from the axis of symmetry of the
42
7/24/2019 Athukorala Thesis
52/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
shell. The circular sector has an angle d . Thus,
Rc= 1
W R+tR
xrddr= 1
W R+tR
r2 cos ddr (3.43)
c = 1
W
R+tR
yrddr= 1
W
R+tR
r2 sin ddr (3.44)
where, denotes the material density of the shell andW(weight of the shell) is given
by,
W =
R+tR
rddr. (3.45)
Use the fact that R >> t, equations (3.43) and (3.44) yield to be,
Rc sin
c = 0
Now, we consider the shell has tilting angle of with respect to the x axis. By
using geometric analysis, a point, x (x > x1) on the x axis is represented by
x
=x1+R sin(+) R sin(+), (3.46)
where represents the angle that makes the corresponding point ofx on the shell
with its axis of symmetry.
Furthermore, force due to hydrostatic pressure acts normal to a surface and our lens
has a circular profile, hence, the aforementioned force acts radially in the outward
direction. The total resultant force due to hydrostatic pressure (FR) is found by
considering a sector element on the shell (refer to Figure 3.10).
FR(R, ) =
(pi(r, )patm)R d r (3.47)
where r is the unit vector in the radial direction and it relates to the Cartesian
43
7/24/2019 Athukorala Thesis
53/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 3.10: Forces on the lens due to the upper tear meniscus and the lower eyelid.Gravityg acts in the x direction. Diameter and the tilting angle of the lens ared and. rdenotes the unit vector in the radial direction. Angle between the tear meniscus
and an axis parallel to the y axis is h1.
coordinate vectors as follows:
r= sin(+)x+ cos(+)y. (3.48)
Thus, using equations (3.46), (3.47), and (3.48)
FR =
(pi(0) +tgx1+tgR sin(+)
tgR sin(+)
patm) rR d
FRx = R(2c0sin sin+tgR( sin cos cos2))FRy = 2R(c0sin cos tgR sin2 sin2), (3.49)
wherec0= pi(0)patm+tgx1+tgR sin(+).
44
7/24/2019 Athukorala Thesis
54/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Let (FLx, FLy) be the lower eyelid force components in the xandy direction re-
spectively andT denote the surface tension that results from the upper tear meniscussuch that T= (sin h1,cos h1).Then, the force equilibrium of the lens yields,
FL+ FR+ W+ T = 0
(FLx, FLy) = (FRx, FRy) (W, 0) +(sin h1, cos h1) (3.50)
Next, we consider the moment of FR, T, W and FL about the point O. Use the
convention that counter-clockwise moment of a force is positive. Since the resultant
force due to hydrostatic pressure acts normal to the surface, the moment ofFRis zero
about the point O. Thus, the moment ofTand W result,
MT = [( cos h1, sin h1) ( sin(+), cos(+))]R= R sin(++h1),
MW = W R cos sin
. (3.51)
Lower eyelid force, FL, acts on the outer surface of the lens. We assume it has the
coordinates (x,y) with respect to the Cartesian coordinate system and using equation(3.46),
(x,y) =
x1+R sin(+) R sin(L+), R cos(L+)
(3.52)
whereL = +sin1
sin() bR
andb denotes the maximum possible overlap
distance for the lower eyelid.
45
7/24/2019 Athukorala Thesis
55/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
The moment due to FL is
MFL = ||(x,y) FL||= ||(x,y) (FLx, FLy)||= (FRy+cos h1)(R sin(L+))
(FRx W+sin h1)R cos(L+) (3.53)
Thus, for the equilibrium of the lens
MT+MW+MFL = 0. (3.54)
3.4.1 Numerical results
We numerically calculate the possible contact angles for the upper tear meniscus.
Thus, FR and FL values are calculated for the possible contact angles that were
mentioned earlier. Finally, the total moment is computed using equation (3.54).
Parameter values that are used in this computation are given in Table 3.3.
Table 3.3: Fixed parameter values for the case when the cornea is flat, and the contactlens has a cylindrical shell shape. The values of{, g},{d, W} and{min, max}maybe found [1], [17], and [22] respectively.
Parameter Value CGS units Parameter Value CGS units
1 g/cm3 d 0.9 cmg 981 cm/s2 W 0.02g dyn 62 dyn cm patm 10
6 dyn/cm2
0 deg [min, max] [10, 50] degR 0.65 cm b 0.1 cm
46
7/24/2019 Athukorala Thesis
56/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
0.05 0.1 0.15 0.2 0.25 0.3200
250
300
350
400
450
Distance,x1 (cm)
FL, FR(dyn)
(a)
FL
FR
0.05 0.1 0.15 0.2 0.25 0.360
50
40
30
20
10
0
10
X: 0.0773Y: 0.005001
Distance,x1 (cm)
(b)
Moment diff.(dyn.cm)
Figure 3.11: Variation of FL, FR and the moment difference with respect to thedistance x1. For all the possible distances x1, FR is greater than the FL. Moreover,Figure 3.11(b) indicates that the equilibrium is possible for the particular distance,x1 0.077cm.
47
7/24/2019 Athukorala Thesis
57/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.4.2 Lower tear meniscus
Finally, we extend the above analysis to a lens with upper and lower tear menisci.
Hence, all the equations derived previously are valid except the equations that containthe lower lid force. The moment due to surface tension of lower tear meniscus yields,
MTL = R[(cos h2, sin h2) (sin( ), cos( ))]= Rsin( +h2) (3.55)
whereh2= L2+.
By using equations (3.51) and (3.55), we derive a formula for the total momentum,
R sin(++h1) R sin( +h2)W R cos sin
= 0. (3.56)
Moreover, the following two equations are derived for the force equilibrium in the x
and y directions, and an equation is derived for the lower contact angle L2.
sin h1+W+FRx+sin h2 = 0, (3.57)FRy cos h1 cos h2 = 0, (3.58)
h2 = tan1
sin h1 W FRx
FRy
cos h1 . (3.59)3.4.2.1 Numerical results
We numerically compute the values ofh2 for the lower tear meniscus using the
equations (3.56) and (3.59) separately. Moreover, contact angle at the lower meniscus,
L2 are obtained using h2 that we obtained by solving the equation (3.56). We use
the same parameter values that was given in Table 3.3 except [min, max] = [30, 70].
Variations of the lower contact angles with respect to a horizontal axis, is shown
in Figure 3.12(a). h2M and H2Fdenote the angles that are obtained by solving the
equations (3.56) and (3.59) respectively. Furthermore, in Figure 3.12(b), (FRx+W)
is the vertical component of the resultant force due to hydrostatic pressure and the
weight of the lens. Stupdenotes the surface tension force that acts in the xdirection.Note that, as depicts in the equation (3.57), the equilibrium in the x direction is
achieved ifS tup > FRx+W. However, according to Figure 3.12(b),Stup < FRx+W
48
7/24/2019 Athukorala Thesis
58/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16
40
60
80
Distance,x1 (cm)
(FRx+ W),Stup(dyn)
(b)
FRx
+W
Stup
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.1660
40
20
0
20
40
60
Distance,x1 (cm)
h2M, H2F(deg)
(a)
h2M
H2F
Figure 3.12: (a) Variation of lower contact angle values with x1. h2M and H2F
denote the lower contact angle values that are obtained by solving the momentumbalance equation and the force balance equations respectively. (b) Variation of theforce components in the x direction (FRx+ W) and the force component in thexdirection (Stup sin h1).
for all the possible values ofx1. Thus, it is not feasible to achieve the equilibrium in
the x direction with a lower tear meniscus.
49
7/24/2019 Athukorala Thesis
59/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
3.5 Three-dimensional analysis of a tear meniscus with a spherical cap type
contact lens
In this section, we consider a lens that has a shape of a spherical cap. Forsimplicity, tilting angle, of the cap is assumed to be 0. The lens and the upper tear
meniscus are modeled with a lower eyelid force, FL.
The radius and a uniform thickness of the spherical cap are assumed to have the
values ofR and t respectively. The center of the cap is denoted by O and the origin
of the spherical coordinate system is placed at that point as shown in Figure 3.13.
The apex angle of the cap is symbolized by 2.
Figure 3.13: Spherical cap type contact lens. The radius and apex angle of thespherical cap are R and 2 respectively. n is the unit normal in the radial direction.
g acts in the x direction. The width and apex angle of the spherical frustum are dzand 2.
In the following analysis, the centroid of the cap is located based on its moment
about the xy, xz and yz planes. However, since the cap is symmetric about the x
50
7/24/2019 Athukorala Thesis
60/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
and y axis, the centroid has the coordinates of the form (0, 0, zc), where zc denotes
the zcoordinate of the centroid. As shown in Figure 3.13, we consider a spherical
frustum on the cap that has an angle from the zaxis with a width ofdz. Let thematerial density of the lens be . Thus, the moment about xy plane results
zc= 1
W
0
2R3t sin2 cos d (3.60)
and
W =
0
2R2t sin2 d. (3.61)
By using the equations (3.60) and (3.61), the zcoordinate of the centroid yields to
be
zc= 2R sin3
3
sin 2
2
. (3.62)
Let the unit vector in the radial direction be n and it is denoted by
n= (sin cos , sin sin , cos ). (3.63)
Next, we consider the forces that act on the lens. Since our lens has a spherical
profile, forces due to hydrostatic pressure act radially in the outward direction, that is,
in the direction ofn. Therefore, the liquid force dFRon an area element,R2 sin dd
on the spherical cap (refer to Figure 3.14) is given by
dFR= (pi(x)patm)R2 sin dd n (3.64)
where
pi(x) =pi(0) +gx1+gR sin+gR sin cos . (3.65)
Thus, the total force resultant due to the liquid pressure FR, on the spherical cap is
51
7/24/2019 Athukorala Thesis
61/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 3.14: Forces acting on the spherical cap. FL and rL denote the lower eyelidforce and its position vector with respect to the coordinate system. Gravity g actsin the x direction. Contact anglel is the angle between the tear meniscus and thelens at distance x1. dFR is the force acting on an area element dAdue to the liquidpressure.
found using the equations (3.64) and (3.65).
FR=
0
20
(pi(x)patm)R2 sin n d d. (3.66)
Hence, its components in the x, y andzdirections are
FRx = gR3
2
3 cos+cos
3
3
,
FRy = 0,
FRz = c1R
2
2 (1
cos2) (3.67)
respectively andc1 = pi(0) +gx1+gR sin patm.
Surface tension forces act along the circumference of the spherical cap in the
52
7/24/2019 Athukorala Thesis
62/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
direction of the tear meniscus. Let v be a vector pointing tangent to the tear meniscus
from a point, C, on the circumference of the spherical cap. An orthonormal basis for
the plane described by the span ofk and n isk, n k(k n)||n k(k n)||
. (3.68)
The vector v in this orthonormal basis is given by
v= cos lk + sin l
n k(k n)||n k(k n)||
. (3.69)
As n= (sin cos , sin sin , cos )T
= sin cos i +sin sin j +cos k, the coordi-nates for the vector v are:
v= (sin lcos , sin lsin , cos l) (3.70)
wherel denotes the contact angle at the pointC(refer to Figure 3.14) and note that
l l(). Thus, the total force due to surface tension (S) is given by the followingequation,
S= 20
vd (3.71)
Then, force equilibrium of the lens yields,
FR+ W+ S + FL= 0. (3.72)
Finally, we consider the moment of the forces, FR, FL, S and W about the point
O. Since the resultant force, FR acts normal to the spherical cap, its moment about
point O is zero.
Let the position vector of the centroid be denoted by rW. Thus, the moment due to
53
7/24/2019 Athukorala Thesis
63/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
the weight (MW) is defined by the equation,
MW = rW W
=
0
2RWsin3
3
sin 2
2
0
. (3.73)
Next, the moment resulted due to the surface tension is considered about the point
O. We denote the vector, rc of a point C, on the base circle of the spherical cap by,
rc= (R sin cos , R sin sin , R cos). (3.74)
Hence, using the equations (3.70) and (3.74), the moment of the surface tension at
the point Cis expressed as
MSc = rc v and then, the total momentum of surface tension yields to beMS =
20
(r v) d
= R 20
sin(+l()) sin
cos
0
d. (3.75)Now, assume the lid force FL has the componentsFLx,FLy andFLz in the directions
ofx, y and z respectively. Let rL be a vector corresponding to the point L, where
the force FL acts on the surface of the spherical cap. Hence, moment of FL about
the point O is,
ML = rL FL
= R
FLzsin sin FLycos FLxcos FLzsin cos FLysin cos FLxsin sin
. (3.76)
Furthermore, using the facts that FRy = 0 and Sy 0, we conclude that FLy 0.
54
7/24/2019 Athukorala Thesis
64/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Thus, applying the aforementioned facts with the help of equation (3.76), we obtain
the following two results at the point L.
= 0
= tan1
FLxFLy
. (3.77)
Finally, for the equilibrium of the lens,
MW+ MS+ ML = 0. (3.78)
3.5.1 Numerical Results
We numerically calculate all the forces and the moments in the x,y andzdirec-
tion for all the possible contact angles at the point (R,,). Possible overlap distances
L for the lower eyelid are numerically calculated by considering the equilibrium of
the lens.
For the numerical calculation, we consider a linear variation ofl with respect
to the angle . Maximum value of the contact angle, which occurs at (R,,), is
computed from equation (3.25) according to as explained in Figure 3.3. This is an
approximation as it neglects the curvature in the direction. The minimum value of
the contact angle, which occurs at (R, 0,) is set at 10
. Equations (3.71) and (3.75)are numerically integrated using the Simpsons 1/3rd rule. Parameter values that are
used in this calculation are given in Table 3.4.
Table 3.4: Fixed parameter values for the case when the cornea is flat and the contactlens has a spherical cap shape. The values of{, g},{c} and{min, max} may befound [1], [16], and [22] respectively.
Parameter Value CGS units Parameter Value CGS units
1 g/cm3 d 0.98 cm
g 981 cm/s
2
W 0.0152g dyn 62 dyn cm patm 106 dyn/cm2
R 0.65 cm [min, max] [10, 50] degc [30, 35] deg
Figure 3.15 shows the variation of forces that act on the lens with respect to
55
7/24/2019 Athukorala Thesis
65/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
the x1 values for the corneal contact angle of 32. As depicted in Figure 3.15(a), (b)
and (c), the eyelid force FL is necessary for the equilibrium of the lens. Note that
hydrostatic force component in theydirection is zero as derived in the equation (3.67).Variation of the moment due to the eyelid force FL is shown in Figure 3.15(d).
0.145 0.1452 0.1454 0.1456 0.1458 0.146 0.1462 0.146460
40
20
0
20
40
60
80
100
Distance, x1 (cm)
Fx (dyn)
(a)
FLx
FRx
FTx
0.145 0.1452 0.1454 0.1456 0.1458 0.146 0.1462 0.14644
3
2
1
0
1
2
3
4x 10
3
Distance, x1 (cm)
Fy (dyn)
(b)
FLy
FRy
FTy
0.145 0.1452 0.1454 0.1456 0.1458 0.146 0.1462 0.1464400
300
200
100
0
100
200
300
400
Distance, x1 (cm)
Fz (dyn)
(c)
FLz
FRz
FTz
0.145 0.1452 0.1454 0.1456 0.1458 0.146 0.1462 0.14642.0252
2.0254
2.0256
2.0258
2.026
2.0262
2.0264x 10
3
Distance, x1 (cm)
ML
(dyn cm)
(d)
Figure 3.15: Variation of the force due to fluid pressure FR, surface tension FT andthe lid force FL in the x,y andzdirections. Bottom right corner figure indicates themoment due the eyelid force FL.
56
7/24/2019 Athukorala Thesis
66/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
0.145 0.1452 0.1454 0.1456 0.1458 0.146 0.1462 0.14642.5
3
3.5
4
4.5
5
5.5
6
6.5x 10
3
Distance, x1 (cm)
L (cm)
0.15 0.155 0.16 0.1650
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Distance, x1 (cm)
L (cm)
0.145 0.15 0.155 0.16 0.165 0.17 0.175 0.180
0.02
0.04
0.06
0.08
0.1
0.12
Distance, x1 (cm)
L (cm)
0 .1 45 0 .1 5 0 .1 55 0 .1 6 0 .1 65 0 .1 7 0 .1 75 0 .1 8 0 .1 850
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Distance, x1 (cm)
L (cm)
Figure 3.16: Variation ofL for different corneal contact angles. From left to right,top to bottom: c = 32, c = 33, c = 34, c = 35. According to the figures, wesee that the values ofL increase as c increases from 32 to 35.
57
7/24/2019 Athukorala Thesis
67/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
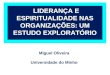
3.6 Comparison with observations
In the literature[16], the value of the corneal contact angle Eis reported to be in
the interval [20
, 49
]. In our analysis so far, we had assumed a flat and vertical cornea.The numerical results reported in Section 3.5 were obtained with this assumption.
The analysis of Section 3.5 shows that there are no feasible solutions when the corneal
contact angle is less than 32. Can the discrepancy between the theoretical results
and experimental observations be satisfactorily explained? In this section, we show
that there is a satisfactory explanation by considering a curved corneal wall that is
inclined at an angle with respect to the vertical at the point of attachment of the
tear meniscus. In Figure 3.17, the origin is this point of attachment of the meniscus
with the curved cornea. We show that the meniscus profiles for the two cases of
flat, vertical cornea, and curved cornea are virtually identical from the point of view
of the contact lens. The two relevant factors, (i) distance from the origin to the
point of attachment of the tear meniscus with the lens, and (ii) the contact angle of
the meniscus with the lens, have virtually identical numerical values. Thus one can
conclude static stability even with much smaller contact angles at the corneal wall
than those predicted by the analysis of Section 3.5.
We denote the contact angles of the tear meniscus with the flat vertical wall and
curved corneal surface byEand EC respectively (refer to Figure 3.17).
We numerically calculate the meniscus profiles and the corresponding slopes forthe contact angles E= 33 andEC= 14.5 using Equation 2.18. For the numerical
analysis, the same parameter values are used as in Table 2 .2. As depicted in Figure
3.18, it is possible to obtain the same contact angle between the tear meniscus and
contact lens for the same tear meniscus height( 0.15 cm) for the contact angles Eand EC. Therefore, the numerical results hold for the same range of values for x1
even when the cornea is not flat.
58
7/24/2019 Athukorala Thesis
68/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
Figure 3.17: Contact angles between the tear meniscus with the flat vertical walland corneal surface. Gravity g acts in the x direction. E and EC denote thecontact angles between the tear meniscus with the flat vertical wall and corneal surfacerespectively. x1 is the upper tear meniscus height.
59
7/24/2019 Athukorala Thesis
69/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.05
0.1
0.15
0.2
0.25
Distance along the vertical wall, x (cm)
z(x) (cm)
(a)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.354
3
2
1
0
Distance along the vertical wall, x (cm)
z(x)
(b)
E
EC
E
EC
Figure 3.18: Meniscus profiles z(x) and their slopes z(x) for the contact anglesE = 33 and EC = 14.5. (a) Variations of the meniscus height with the distancefrom the vertical wall. Note that the two meniscus profiles become identical at theheight,z(x) 0.05 cmand their corresponding slopes z(x) (refer to Figure 3.18(b)).
60
7/24/2019 Athukorala Thesis
70/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
CHAPTER 4
CONCLUSIONS
In this research, we mathematically modeled a tear meniscus around a symmet-
ric, spherical cap lens that was at static equilibrium, using a calculus of variations
approach. Static equilibrium was analyzed by taking the net force and net moment
to be zero. The results discussed below assume a flat cornea. However, as shown in
Section 3.6 the results held (that is, static equilibrium can be archived) for the same
range of values for x1 even when the cornea is not flat.
We obtained a range of values for the adjustable parameters, the corneal contact
angleE, upper contact angle L1and lens positionx1through numerical simulations.
There were no solutions for E in the range [0, 31]. For E = 32, our numerical
analysis showed that the static equilibrium may be achieved for x1 in the interval
[0.145, 0.146]. The analysis further showed that pressure force dominated surface
tension and the weight of the lens. Hence, for the equilibrium of the lens, it was
necessary to introduce the lower lid force FL. When we increased the value of E
from 32 to 35, ranges ofx1 and lid overlap distance Lbecame [1.45, 1.84] mmand
[0.025, 1.25] mmrespectively. At this particular corneal contact angle, the magnitude
of the lower eyelid forceFLwas approximately 75.2 dyn. The pressure due to the lower
lid when the lid overlap is between 0.1 mm 0.27 mm is in the range 3.1 mmHg 13.7 mmHg, with lesser value for lid overlap corresponding to higher lid pressure.
This compares well with the intraocular pressure of 10 mmHg 20 mmHg [21]. Lidoverlap values up to 0.27 mmare physically reasonable [14]. Therefore, we have shown
that there exists physically reasonable solutions for a contact lens in static equilibrium
for a adjustable parameter values.
61
7/24/2019 Athukorala Thesis
71/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
BIBLIOGRAPHY
[1] Hayashi, T.T., (1977), Mechanics of Contact Lens Motion, Ph.D Dissertation,University of California.
[2] Moriarty, J.A., Terrill, E.L, (1996), Mathematical Modeling of the Motion ofHard Contact Lenses, Euro. J. Appl. Math, Vol 7, pp575-594.
[3] de Gennes, P-G., Quere, D., (2004), Capillary and Wetting Phenomena,Springer, New York.
[4] de Gennes, P-G., (1985), Wetting: Statics and Dynamics, Reviews of ModernPhysics, Vol 57, pp827-863.
[5] Gao, L., McCarthy T.J., (2006), Contact Angle Hysteresis Explained,AmericanChemical Society, Vol 14, pp6234-6237.
[6] Joanny, J.F., de Gennes, P-G., (1984), A model for contact angle hysteresis,American Institute of Physics, Vol 81, pp552-562.
[7] Deen W.M., (1998), Analysis of Transport Phenomena, Oxford University Press,New York.
[8] Bennett, E.S., Weissman, B.A., (2004). Clinical Contact Lens Practice, Lippin-cott Williams & Wilkins, Philadelphia.
[9] Butt, H.J., Graf, K., Kappl, M., (2006), Physics and Chemistry of Interfaces,John Wiley & Sons, Weinheim.
[10] Choi, C., Kim, M., (2011), Wettability Effects on Heat Transfer, Two PhaseFlow, Phase Change and Numerical Modeling,Amimul Ahsan (Ed.), ISBN: 978-953-307-584-6, InTech, Available from: http://www.intechopen.com/books/two-phase-flow-phase-change-and-numerical-modeling/wettability-effects-on-heat-transfer.
[11] Finn R., (1999), Capillary Surface Interfaces,Notices Amer. Math. Soc., Vol 46,pp770.
[12] Frankel, T., (2004), The Geometry of Physics: An Introduction, CambridgeUniversity Press, New York.
[13] Schulz, E., Simon, F., (1984), Contact lens fitting for binocular micromovementrecording, Graefes Archive for Clinical and Experimental Ophthalmology, Vol221, pp282-285.
62
7/24/2019 Athukorala Thesis
72/72
Texas Tech University, Bhagya U.A. Athukorallage, July 2012
[14] Wang J., Cox I., Reindel W.T., (2009), Upper and Lower Tear Menisci on Con-tact Lenses, Investigative Ophthalmology and Visual Science, Vol 50, pp1106-1111.
[15] Gelfand, I.M., Fomin, S.V., Silverman, R.A., (2000), Calculus of Variations,Dover Publications, New York.
[16] Lemp, M.A., Holly, F.J., Iwata, S., Dohlman, C.H., (1970), The precorneal tearfilm: I. factors in spreading and