Embed Size (px)
Citation preview

AULA 2
MODELAGEM DE FALHAS
2.1 - INTRODUÇÃO
Nesta aula serão desenvolvidos os modelos de dois sistemas dinâmicos considerando osefeitos das falhas. O objetivo de tal desenvolvimento é ter uma ferramenta de projeto e testedos sistemas de detecção e diagnóstico de falhas que serão estudados adiante.
Serão modelados dois sistemas dinâmicos, a saber: sistema de acionamento elétricoutilizando máquina de corrente continua (C.C.) e sistema de tanques interativos. Os modelosdestes sistemas são não lineares e de ordem 3 e 2, respectivamente. Para o sistema deacionamento C.C., além do modelo contínuo é desenvolvido o modelo discreto. Serãoapresentados resultados de simulações de algumas falhas modeladas.
2.2 - MODELAGEM DE FALHAS PARA O SISTEMA DE ACIONAMENTO C.C.
2.2.1 - MODELO DO SISTEMA DE ACIONAMENTO C.C.
O sistema de acionamento C.C. é composto por duas fontes de alimentação, conversoresestáticos controlados, uma máquina de corrente contínua e uma carga mecânica, figura 2.1. Odiagrama de blocos do sistema completo, incluindo o controle, é mostrado na figura 2.2. Ocontrolador de velocidade, tipo proporcional integral, fornece o valor da corrente dearmadura de referência. O controle da corrente da armadura é feito através da variação datensão de alimentação. Esta tensão é função do ângulo de disparo do conversor, fornecidopelo controlador de corrente. A malha de campo, além de proporcionar o controle da corrente,permite que o sistema de acionamento opere à velocidade acima da nominal com potênciaconstante, via enfraquecimento de campo (Bose, 1986).
va
iaifd
ra ,La
rfdLfd
Tem
TL
ea
Conversor
1 MÁQUINA CARGA
vfd
Conversor 2
Fig. 2.1 - Representação do sistema de acionamento C.C.

45
PI
PIPI
MOTOR+
CARGA
MECÂNICAva
vfdifd
ia
ω rα a
α fdi fd
*
ω r*
--
-
+ +
+
ia*
Fig. 2.2 - Diagrama de blocos do sistema de acionamento C.C.
onde
va: tensão de alimentação do circuito da armadura;vfd: tensão de alimentação do circuito de campo;ia: corrente do circuito de armadura;ifd: corrente do circuito de campo;ωr: velocidade mecânica de rotação em rad/s;
αfd: ângulo de disparo do conversor do circuito de campo;
αa: ângulo de disparo do conversor do circuito de armadura;
sendo que as variáveis indexadas por n são referentes a valores nominais da máquina.
A corrente de campo de referência é calculada da seguinte forma:
>
≤= n
rrr
nrn
nrr
nfd
fdfd
i
ii
ωωωω
ωω
**
*
*
para,.
para, (2.1)
2.2.1.1 - Modelo da Máquina de Corrente Contínua
A máquina de corrente contínua possui o campo (excitação) independente da armadura, comomostrado na figura 2.1. Considerando as correntes ia e ifd e a velocidade ωr como variáveis deestado, o modelo dinâmico para a máquina funcionando como motor é representado por:

46
( )
( )
( )
didt L
v r i e
didt L
v r i
ddt J
T B T
a
aa a a a
ifd
fdfd rfd fd
r
mem m r L
= − −
= −
= − −
1
1
1
.
.
.ω
ω
(2.2)
sendo
=
=
afdafdem
rfdafda
iiLT
iLe
..
.. ω(2.3)
onde ra: resistência do circuito da armadura;rfd: resistência do circuito de campo;La: indutância do circuito da armadura;Lfd: indutância do circuito de campo;Lafd: indutância mútua armadura/campo;ea: força-contra-eletromotriz da armadura;Tem: conjugado eletromagnético;TL: conjugado mecânico exigido pela carga;Bm: coeficiente de atrito viscoso;Jm: momento de inércia do sistema motor/carga.
Considerando que ia, ifd e ωr são as variáveis medidas, colocando na forma de equaçãode estado, tem-se o modelo contínuo para a máquina de corrente contínua, representado por:
[ ]&
&
&
.
.
. . .xxx
rL
LL
x
rL
LJ
xBJ
xxx
L
Lvv T
yyy
a
a
afd
a
fd
fd
afd
m
m
m
a
fd
a
fdL
1
2
3
3
2
1
2
3
1
2
3
0
0 0
0
10
01
0 0
001
=
− −
−
−
+
+
−
=
=
1 0 00 1 00 0 1
1
2
3
1
2
3
xxx
ondeyyy
ii
a
fd
r
,ω
(2.4)
Nota-se que se trata de um sistema dinâmico não linear, resultante do produto de variáveis deestado.

47
Um modelo discreto para o sistema acima é representado pela equação (2.5). Paraobtê-lo foi usada a mesma metodologia adotada por Silvino et alii (1993).
( )( )( )
( )
( )
( )( )( )
( )( ) ( )[ ]
( )( )( )
x kx kx k
a a ka
a k a
x kx kx k
bb
v kv k
dT k
y ky ky k
a
fd L
1
2
3
1 2
3
4 5
1
2
3
1
2
1
1
2
2
111
00 0
0
000 0 0
00
1 0 00 1
+++
=
+
+
=
. . .
( )( )( )
00 0 1
1
2
3
.x kx kx k
(2.5)
onde
( ) ( )
( ) ( ) ( )( ) ( ) ( )
( )
( ) ( )( )( ) ( ) ( )[ ]
( ) ( )
−−==
−==
−+−−
=
==
−==
−====
====−
−−
m
mm
fd
fdfd
afdfdafdafd
fdaafd
fdfdaa
a
aa
m
afdmm
hmJmB
mm
hfdLfdr
fdfd
haLar
aa
Ba
JBddr
aLrbb
aLraLrkxaaLLLrLr
kxLrLrakar
aLrbb
kxB
aLkxJBakaeJBaa
eLraaeLraa
511
322
31313
322
111
25
244
.
55
.
33
.
11
1,
1,
.........
1,,,,
1,
.1
,,,
,,
(2.6)
2.2.1.2 - Modelo da Carga Mecânica
O modelo da carga mecânica é estabelecido pela equação de conjugado. Considerou-se umacarga genérica, cujo conjugado é:
T C C CL r r= + +0 1 22. .ω ω (2.7)
2.2.1.3 - Modelo dos Conversores Estáticos
Os dois conversores, da armadura e do circuito de campo, são tipo Ponte de Graetz a Tiristor.É adotado o modelo estático para calcular a tensão de saída em função do ângulo de disparo(Bose, 1996):
fdofdfd
aoaa
VvVv
αα
cos34.2cos34.2
==
(2.8)

48
sendo Voa e Vofd os valores eficazes das tensões nas entradas dos conversores da armadura ecampo, respectivamente.
2.2.2 - MODELAGEM DAS FALHAS PARA O SISTEMA DE ACIONAMENTO C.C.
Do ponto de vista de classificação de falhas, o sistema de acionamento C.C. pode ser divididoem três grandes grupos: atuadores (conversores da armadura e do campo); planta ou processo(máquina e carga mecânica) e sensores (medidores de corrente e velocidade). Serão abordadasfalhas relacionadas a estes três grupos.
2.2.2.1 - Falhas em Atuadores
O número de falhas que podem ocorrer nos conversores estáticos é muito grande, como, porexemplo, queima de componentes nos circuitos de potência e comando. Mas, do ponto devista da máquina, as duas falhas mais graves são curto-circuito e desconexão do conversor.Estas falhas podem ser modeladas pelas chaves ideais CHaa , CHafd , CHcca e CHccfd, figura2.3.
va
ia ifd
ra ,La
CHaa
CHcca
CHccfd
CHafd
vfd
Fig. 2.3 - Representação do sistema de acionamento C.C.para falhas nos atuadores.
Associando os parâmetros:
{ }kaa ∈ 01, { 0 } indica a desconexão do conversor da armadura;{ }1,0∈afdk { 0 } indica a desconexão do conversor do campo;
{ }kcca ∈ 01, { 1 } indica curto-circuito do conversor da armadura;{ }kccfd ∈ 01, { 1 } indica curto-circuito do conversor do campo;
aos estados das chaves, tal que:
ki=0 se CHi estiver aberta eki=1 se CHi estiver fechada, i= aa, afd, cca e ccfd.

49
Considerando que uma falta de alimentação é caracterizada por uma corrente e um curto-circuito, por uma tensão nula, tem-se o modelo para falhas no circuito de alimentação damáquina dado por (2.9).
( )( )( )
( )
( )
( )( )( )
( )( ) ( )[ ]
( )( )( )
( )( )( )
(3.9) 1.100010001
.00
..
...
000
0.
00.00..
111
3
2
1
2
2
1
1
2
1
3
2
1
54
3
21
3
2
1
ii
Lfdccfdafd
accaaaafd
aaaa
kkondekxkxkx
kykyky
kTd
kvkkkvkk
bb
kxkxkx
akaak
kakak
kxkxkx
−=
=
+
+
=
+++
2.2.2.2 - Falhas em Componentes da Planta
As falhas no conjunto máquina/carga consideradas são: curto-circuito entre espiras na bobinada armadura; curto-circuito entre espiras na bobina do campo; falha no sistema de ventilaçãoe falha de lubrificação. As duas primeiras podem ser modeladas por variações nas resistênciase indutâncias da armadura e do campo. Estas variações são modeladas pelos parâmetros:
[ ]kcara ∈ 01, indica a variação na resistência ra quando ocorre curto-circuito na bobina da
armadura;[ ]kca
La ∈ 01, indica a variação na indutância La quando ocorre curto-circuito na bobina da armadura;
[ ]kcfdrfd ∈ 01, indica a variação na resistência rfd quando ocorre curto-circuito na bobina do
campo;[ ]1,0∈fdL
cfdk indica a variação na indutância Lfd quando ocorre curto-circuito na bobina do campo.
A falha no sistema de ventilação se traduz em variações das resistência da armadura e docampo, provocadas pela elevação de temperatura da máquina. Já uma má lubrificação dosmancais, falha de lubrificação, pode ser modelada por uma variação do coeficiente de atrito.
Os parâmetros que representam estas duas falhas são:
k fvra indica a variação na resistência ra quando ocorre falha no sistema de ventilação;
k fvrfd
indica a variação na resistência rfd quando ocorre falha no sistema de ventilação;k fl indica a variação no coeficiente de atrito, Bm , quando ocorre falha de lubrificação dos mancais.

50
O modelo que incorpora somente as falhas em componentes da planta é compostopelas equações de (2.5) a (2.8), onde, no cálculo dos coeficientes de (2.6), a1 , a2(k), a3, a4(k),b1, b2 e d1, os parâmetros nominais são substituídos por (2.10).
=
=
=
=
=
mfl
f
m
fd
fdL
cfd
f
fd
fd
fdr
fv
fdr
cfd
f
fd
aaL
ca
f
a
aar
fvar
ca
f
a
BkBLkL
rkkrLkL
rkkr
..
...
..
(2.10)
2.2.2.3 - Falhas de Instrumentação
Aqui são consideradas falhas bruscas (desligamentos) dos sensores de corrente (armadura ecampo) e de velocidade, modeladas pelos parâmetros:
{ }kifa∈ 01, { 1 } indica falha no sensor da corrente da armadura;
{ }kiffd∈ 01, { 1 } indica falha no sensor da corrente do campo;
{ }kr
fω ∈ 0 1, { 1 } indica falha no sensor de velocidade da máquina.
Com relação ao modelo das falhas nos sensores, este difere do modelo representado pelasequações (2.5) a (2.8) somente com relação à equação de saída, que passa a ser calculada por:
( )( )( )
( )( )( )
iif
fi
fi
kkkxkxkx
kk
k
kykyky
r
fd
a
−=
=
1onde.
000000
3
2
1
2
2
1
ω
(2.11)
2.2.3 - Modelo Geral das Falhas no Sistema de Acionamento C.C.
Considerando os dois tipos de falhas abordados anteriormente, tabela 1, tem-se o modelocompleto dado por (2.12), (2.6), (2.7) e (2.8). O circuito representativo deste modelo émostrado na figura 2.3.

51
( )( )( )
( )
( )
( )( )( )
( )( ) ( )[ ]
( )( )( )
( )( )( )
( )3.12 1.00
0000
.00
..
...
000
0.
00.00..
111
3
2
1
2
2
1
13
2
1
3
2
1
2
1
54
3
21
iif
w
fi
fi
Lffdccfdaf
accaaaf
f
ff
faf
faa
faa
kkondekxkxkx
kk
k
kykyky
kTd
kvkkkvkk
bb
kxkxkx
akaak
kakak
kxkxkx
r
fd
a
−=
=
+
+
=
+++
sendo que os coeficientes indexados pelo sobrescrito “f” são calculados substituindo osparâmetros nominais da máquina por (2.10).
va
ia ifd
CHaa
CHcca
CHccfd
CHafd
vfd
Fig. 2.4 - Representação do sistema de acionamento C.C.para os diversos tipos de falhas.
Tabela 1: Resumo das falhas no sistema de acionamento C.C.
Tipo de FalhaVariáveisAfetadas
ParâmetrosIndicadores
da Falha
Definiçãodos
Parâmetrosabertura da bobina da armadura ia=0 kaa, {0, 1}
abertura da bobina de campo ifd=0 kaf {0, 1}curto-circuito do conversor da armadura va=0 kcFa {0, 1}
curto-circuito do conversor do campo vfd=0 kcFa {0, 1}curto-circuito entre espiras da bobina de
armadurara e La kca
ra e kcaLa [0, 1]
curto-circuito entre espiras da bobina decampo
rfd e Lfd kcfr fd e kcf
L fd [0, 1]
falha no sistema de ventilação ra e rfd k fvra e k fv
rfd [1,∞ )
falha de lubrificação dos mancais Bm k fl [0, ∞)falha no sensor de corrente da armadura ia ki
fa
falha no sensor de corrente da fonte ifd kiffd
{0, 1}
falha no sensor de velocidade ωr kr
fω {0, 1}
52
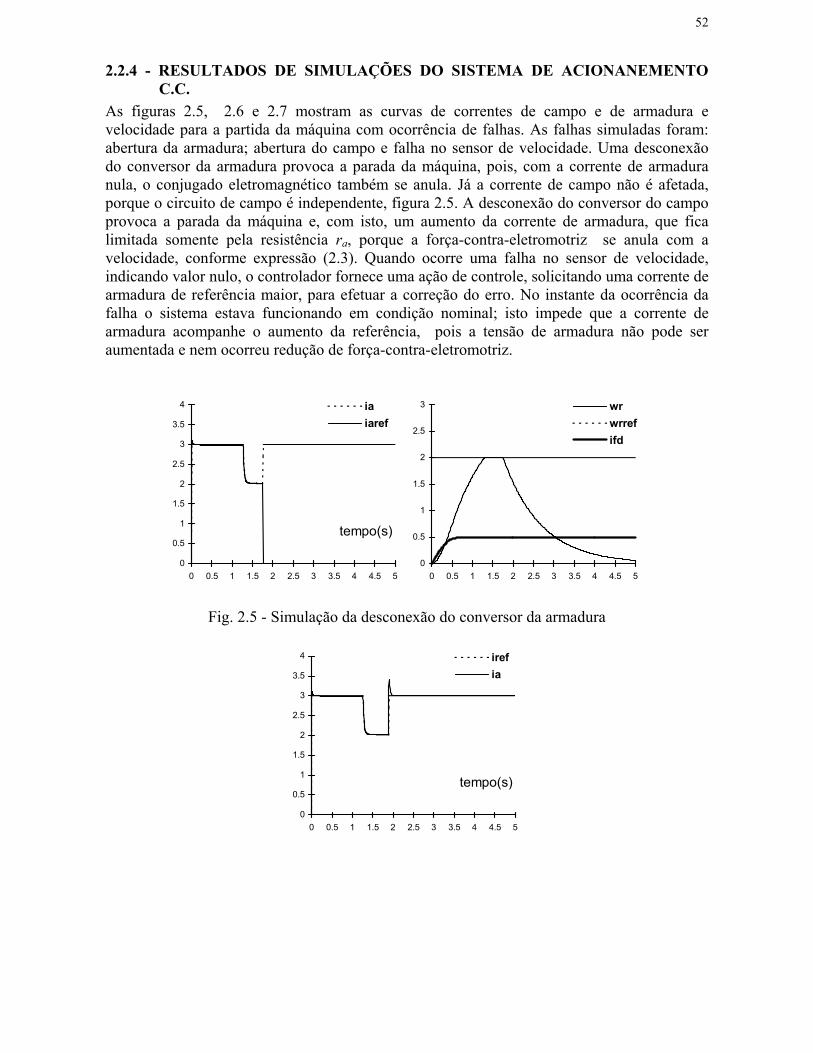
2.2.4 - RESULTADOS DE SIMULAÇÕES DO SISTEMA DE ACIONANEMENTO C.C.As figuras 2.5, 2.6 e 2.7 mostram as curvas de correntes de campo e de armadura evelocidade para a partida da máquina com ocorrência de falhas. As falhas simuladas foram:abertura da armadura; abertura do campo e falha no sensor de velocidade. Uma desconexãodo conversor da armadura provoca a parada da máquina, pois, com a corrente de armaduranula, o conjugado eletromagnético também se anula. Já a corrente de campo não é afetada,porque o circuito de campo é independente, figura 2.5. A desconexão do conversor do campoprovoca a parada da máquina e, com isto, um aumento da corrente de armadura, que ficalimitada somente pela resistência ra, porque a força-contra-eletromotriz se anula com avelocidade, conforme expressão (2.3). Quando ocorre uma falha no sensor de velocidade,indicando valor nulo, o controlador fornece uma ação de controle, solicitando uma corrente dearmadura de referência maior, para efetuar a correção do erro. No instante da ocorrência dafalha o sistema estava funcionando em condição nominal; isto impede que a corrente dearmadura acompanhe o aumento da referência, pois a tensão de armadura não pode seraumentada e nem ocorreu redução de força-contra-eletromotriz.
0
0.5
1
1.5
2
2.5
3
3.5
4
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
tempo(s)
iaiaref
0
0.5
1
1.5
2
2.5
3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
wrwrrefifd
Fig. 2.5 - Simulação da desconexão do conversor da armadura
0
0.5
1
1.5
2
2.5
3
3.5
4
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
tempo(s)
irefia

53
0
0.5
1
1.5
2
2.5
3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
wrifd
Fig. 2.6 - Simulação da desconexão do conversor de campo
0
0.5
1
1.5
2
2.5
3
3.5
4
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
tempo(s)
iarefia
0
0.5
1
1.5
2
2.5
3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
wrifdva
Fig. 2.7 - Simulação de falha no sensor de velocidade

54
2.3 - MODELAGEM DE FALHAS PARA O SISTEMA DE TANQUES INTERATIVOS
A modelagem de falhas apresentada neste item foi desenvolvida e validada por Pereira(1996). Boa parte do texto apresentado neste item foi retirada do referido trabalho, sendo queas equações foram escritas de forma mais compacta.
2.3.1 - DESCRIÇÃO DO SISTEMA
A descrição detalhada do Sistema de Tanques Interativos (ou acoplados)-STI, do Laboratóriode Controle de Processos Industriais do CPDEE-UFMG, está presente em (Jota et alli, 1995;Braga, 1994). A figura 2.8 mostra o diagrama simplificado do sistema. Um microcomputadorPC386 executa o software de supervisão e controle, ligado a um Controlador LógicoProgramável (PLC), através de uma porta serial RS-232. O PLC é encarregado da aquisiçãode dados das variáveis do processo, de atuar na planta de acordo com os dados fornecidospelo microcomputador, além de executar o controle lógico do intertravamento necessário parao funcionamento correto do sistema. Entre o PLC e a planta há um painel de operação quepermite, além da visualização das variáveis, o controle lógico e a operação manual doprocesso.
Fig. 2.8 - Diagrama de blocos do Sistema de Tanques Interativos (Braga, 1994)
A figura 2.9 mostra o diagrama do fluxo de massa nos Tanques Interativos. O objetivoé controlar o nível do tanque TQ-3, h3, e a sua vazão de saída, qo. O ciclo de operação dosistema consiste no bombeamento da água do tanque TQ-1 para o tanque TQ-2 através dabomba BA-1. A água flui para o tanque TQ-3 através do princípio dos vasos comunicantes; aintensidade deste acoplamento é controlada através das válvulas FV-3 e FV-4 (a válvula FV-5fica permanentemente fechada durante o funcionamento normal). O ciclo se completa com obombeamento da água do TQ-3 de volta para o TQ-1 através da bomba BA-2. Com isto, ocontrole do nível no tanque TQ-3 é feito a partir da atuação da válvula pneumática FCV-1,que controla a vazão de entrada de TQ-2, conseqüentemente, controla a vazão de entrada deTQ-3. Já a vazão de saída de TQ-3 é controlada atuando-se na válvula pneumática FCV-2.

55
TQ-2 TQ-3
TQ-1
qi
qo
q23
BA-1
BA-2
FCV-1
FCV-2
FV-3 FV-4
q21
FV-5
FV-7
h2
h1
h3
Fig. 2.9 - Fluxo de massa nos Tanques Interativos
2.3.2 - MODELO DO SISTEMA DE TANQUES INTERATIVOS
O modelo matemático do sistema de tanques interativos é obtido a partir do balanço de massaentre os tanques TQ-2 e TQ-3 e utilizando a Lei de Bernouli (Braga, 1994). Tomando-se:x1 = h2, x2 = h3, y1 = h3, y2 = qo e y3 =qi , o modelo do sistema é dado por:
( ) ( )[ ]
( ) ( )[ ]
& , , ,
& , , ,
xA
q R u p q x x
xA
q x x q R u p
i
o
1 1 1 1 23 1 2
2 23 1 2 2 2 2
1
1
= −
= −
(2.13)
( )
( )
y x
y q R u p
y q R u p
o
i
1 2
2 2 2 2
3 1 1 1
=
=
=
, ,
, ,
(2.14)
onde
( ) ( )( ) ( )
( )
−=
=
=
h
foo
fii
Rxx
xxq
puRqQpuRqpuRqQpuRq
212123
222max222
111max111
,
,,.,,
,,.,,
(2.15a)
a expressão usada para calcular a vazão qf (Pereira, 1996) foi:
( )
( ) iui
iiif
pR
puRq
i.111
1,,
1(2
−+
=
−
(2.15b)

56
sendo qo(R2,u2,p2): vazão de saída do tanque TQ-3, em m3/s;qi(R1,u1,p1): vazão de entrada do tanque TQ-2, em m3/s;q23(x1,x2): vazão entre os tanques TQ-2 e TQ-3, em m3/s;qf(Ri,ui,pi): vazão fracionária da válvula “i”;Qimax: vazão máxima de entrada do tanque TQ-2, em m3/s;Qomax: vazão máxima de saída do tanque TQ-3, em m3/s;A: área da base dos tanques TQ-2 e TQ-3;R1: representa o alcance da válvulas FCV-1;R2: representa o alcance da válvulas FCV-2;p1: razão entre a queda de pressão mínima e máxima da válvula FCV-1;p2: razão entre a queda de pressão mínima e máxima da válvula FCV-2;Rh: resistência hidráulica do duto entre os tanques;u1: sinal de controle fracionário da válvula FCV-1;u2: sinal de controle fracionário da válvula FCV-2.
As variáveis de controle u1 e u2 indicam as posições fracionárias dos eixos dasválvulas FCV-1 e FCV-2, respectivamente, ou seja indicam a abertura ou fechamento dasmesmas. Estas grandezas são determinadas a partir do sistema de controle como mostrado nafigura 2.10.
PIDNÍVEL
PIDVAZÃO
PLANTA
y1
y3
y2
y1*
y2*
-
+
+
-
u2
u1
Fig. 2.10 - Diagrama de blocos do sistema de controle
2.3.3 - MODELAGEM DE FALHAS PARA O SISTEMA DE TANQUES INTERATIVOS
2.3.3.1 - Falha dos Atuadores
As falhas nos atuadores modeladas foram: falhas nas válvulas FCV-1 e FCV-2 e nas bombasBA-1 e BA-2. No caso das válvulas a falha mais comum é o agarramento, isto é, a válvula ficapresa numa certa posição, não mais respondendo aos comandos do controlador. Amodelagem desta falha é feita fixando-se o valor da vazão da válvula, que depende da posiçãofracionária do eixo da válvula na qual ocorreu o agarramento, ua1 para a válvula FCV-1 e ua2para FCV-2. Portanto, tem-se:
( ) ( )q R u p Q q R u p qifcv
imax f a a1
1 1 1 1 1 1 1, , . , ,= = (2.16)
para falha na válvula FCV-1 e
( ) ( )q R u p Q q R u p qofcv
omax f a a2
2 2 2 2 2 2 2, , . , ,= = (2.17)

57
para falha em FCV-2.
Já para as bombas, a falha mais comum é a interrupção do funcionamento (por umdefeito mecânico ou elétrico). Esta falha pode ser realizada desligando a bomba no painel decontrole (modo manual). Para a bomba BA-1, a falha é modelada fazendo a vazão de entradaigual a zero, ou seja:
( )q R u pifba1
1 1 1 0, , = (2.18)
para falha de desligamento da bomba BA-1.
No caso da bomba BA-2, a vazão de saída só será nula se o nível do TQ-03 for inferiorà altura ao ponto de tomada de água da bomba, hba2. Caso contrário, haverá uma vazão desaída, por efeito da gravidade, até que estes níveis se igualem. Esta vazão é dependente donível e da abertura da válvula e é dada por:
( ) ( )q R u p x
se x h
x h
RR
ofba
ba
ba
hb
u2
2 2 2 2
2 2
2 2
312
1
0
2
, , ,.
=
≤
−
− (2.19)
Com isto, o modelo do sistema de tanques interativos que incorpora as falhas dos atuadores édado por:
( ) ( )[ ]
( ) ( )[ ]
& , , ,
& , , , ,
xA
q R u p q x x
xA
q x x q R u p x
ifa
ofa
1 1 1 1 23 1 2
2 23 1 2 2 2 2 2
1
1
= −
= −
(2.20)
( )
( )
y x
y q R u p x
y q R u p
ofa
ifa
1 2
2 2 2 2 2
3 1 1 1
=
=
=
, , ,
, ,
(2.21)
sendo
( ) ( )[ ]( ) ( )( ) ( )
q R u p k Q k q R u p k q
q R u p x Q k k q R u p k q k Kx h
Q RR
ifa
fba imax fcv f fcv a
ofa
omax fba fcv f fcv a fba bba
omax hb
u
1 1 1 1 1 1 1 1 1 1
2 2 2 2 2 2 2 2 2 2 2 2 22 2
312
12
, , . . . , , .
, , , . . . , , . . ..
.
= +
= + +−
−
(2.22)
onde k kfcv fcv1 11= − e { }k fcv1 0 1∈ , indica a falha na válvula FCV-1;

58
k kfcv fcv2 21= − e { }k fcv2 0 1∈ , indica a falha na válvula FCV-2;k kfba fba1 11= − e { }k fba1 0 1∈ , indica a falha na bomba BA-1;k kfba fba2 21= − e { }k fba2 0 1∈ , indica a falha na bomba BA-2;
Kse x h
se x hbba
ba2
2 2
2 2
0
1=
≤
>
2.3.3.2 - Falha nos Componentes do Sistema
As falhas modeladas foram: entupimentos e vazamentos nos dutos de conexão entre tanques.Os entupimentos considerados foram: no duto de entrada de TQ-2, no duto de saída de TQ-3 eno duto de conexão TQ-2 e TQ-3. O vazamento modelado também é entre TQ-2 e TQ-3.
O entupimento de um duto provoca um aumento da sua resistência hidráulica,conseqüentemente, provoca uma redução da vazão no mesmo. Os entupimentos no duto deentrada de TQ-2, no duto de saída de TQ-3 e no duto de ligação de TQ-2 e TQ-3 forammodelados multiplicando-se as vazões qi(R1,u1,p1), qo(r2,u2,p2) e q23(x1,x2) por parâmetrosdefinidos no intervalo [0, 1].
Já o vazamento entre os tanques TQ-2 e TQ-3 pode ser modelado considerando-se queo fluxo de água no vazamento do duto é composto por uma parte de origem de TQ-2 e poruma parte de origem de TQ-3. Como no sistema real esta falha é simulada abrindo a válvulaFV-5, a cada uma destas componentes são atribuídas resistências hidráulicas similares àresistência entre TQ-2 e TQ-3. A vazão que escoa por razão do vazamento pode serdeterminada pelo nível, hi, de cada tanque. Com isto, tem-se o modelo do sistema para falhasnos componentes:
( ) ( )
( ) ( )
& , , , .
& , , , .
xA
q R u p q x xx
Rk
xA
q x x q R u px
Rk
ifc fc
hvfv
fcofc
hvfv
1 1 1 1 23 1 21
2123
2 23 1 2 2 2 22
3123
1
1
= − −
= − −
(2.23)
( )
( )
y x
y q R u p
y q R u p
ofc
ifc
1 2
2 2 2 2
3 1 1 1
=
=
=
, ,
, ,
(2.24)
sendo

59
( ) ( )
( ) ( )
( )
q R u p k Q q R u p
q R u p k Q q R u p
q x x kx x
R
ifc
fe imax f
ofc
fe omax f
fcfe
h
1 1 1 12 1 1 1
2 2 2 31 2 2 2
23 1 2 231 2
, , . . , ,
, , . . , ,
,
=
=
=−
(2.25)
onde k kfe fe12 121= − e [ ]k fe12 0 1∈ , . Indica o entupimento no duto entre TQ-1 e TQ-2;k kfe fe31 311= − e [ ]k fe31 0 1∈ , . Indica o entupimento no duto entre TQ-3 e TQ-1;k kfe fe23 231= − e [ ]k fe23 0 1∈ , . Indica o entupimento no duto entre TQ-2 e TQ-3.
[ ]k fv23 0 1∈ , . Indica o vazamento no duto entre TQ-2 e TQ-3.
Estes parâmetros não só indicam a presença da falha mas também a sua intensidade.
2.3.3.3 - Falha de Instrumentação
As variáveis de saída y2 e y3 são medidas utilizando-se sensores de vazão do tipo turbina, ey1, sensor de nível tipo célula de carga. Para estes sensores foram consideradas somente falhasbruscas. No caso do sensor de nível, falhas bruscas podem ser causadas pela queda da linha detransmissão do sinal para o PLC ou pela desconexão do tubo de ar da cápsula da célula decarga. Já as falhas bruscas dos sensores de vazão podem ocorrer pela queda da linha detransmissão do sinal, pelo agarramento da turbina ou mesmo pela obstrução do feixe de luzinfravermelho usado na medição.
Estas falhas podem ser modeladas da seguinte forma:
( ) ( )[ ]
( ) ( )[ ]
& , , ,
& , , ,
xA
q R u p q x x
xA
q x x q R u p
i
o
1 1 1 1 23 1 2
2 23 1 2 2 2 2
1
1
= −
= −
(2.26)
( )
( )
y k x
y k q R u p
y k q R u p
fy
fy o
fy i
1 1 2
2 2 2 2 2
3 3 1 1 1
=
=
=
.
. , ,
. , ,
(2.27)
onde { }k fy1 0 1∈ , indica falha no sensor de nível;{ }k fy2 0 1∈ , indica falha no sensor de vazão de saída;{ }k fy3 0 1∈ , indica falha no sensor de vazão de entrada.

60
2.3.4 - MODELO GERAL DAS FALHAS NO SISTEMA DE TANQUES INTERATIVOS
Utilizando o desenvolvimento feito nos itens anteriores e incorporando algumas consideraçãopráticas sobre a planta real, como ruído de medição e proteção (Braga, 1994; Pereira, 1996),chega-se ao modelo geral dado por (2.52) a (2.57). Com relação à proteção, esta ocorrequando o nível do tanque TQ-2 atingir o nível máximo e quando o nível do tanque TQ-3atingir um valor de 4% do nível máximo. Para a primeira situação a bomba BA-1 é desligada.Já para a segunda situação a bomba BA-2 é desligada, provocando uma elevação do nível até6% do máximo quando a bomba é religada.
( ) ( )
( ) ( )
& , , , .
& , , , , .
xA
q R u p q x xx
Rk
xA
q x x q R u p xx
Rk
if f
hvfv
fof
hvfv
1 1 1 1 23 1 21
2123
2 23 1 2 2 2 2 22
3123
1
1
= − −
= − −
(2.28)
( )( )
y k x r
y k q R u p x r
y k q R u p r
fy y
fy of
y
fy if
y
1 1 2
2 2 2 2 2 2
3 3 1 1 1
1
2
3
= +
= +
= +
.
. , , ,
. , ,
(2.29)
sendo
( ) ( )[ ]( ) ( )( ) ( )
( )
q R u p Q k k k q R u p k q
q R u p x Q k k k q R u p k q k Kx h
Q RR
q x x kx x
R
q R
if
imax fe fba fcv f fcv a
of
omax fe fba fcv f fcv a fba bhba
omax hb
u
ffe
h
f i
1 1 1 12 1 1 1 1 1 1 1
2 2 2 2 31 2 2 2 2 2 2 2 2 22 2
312
1
23 1 2 231 2
2
, , . . , , .
, , , . . . , , . . ..
.
, .
,
= +
= + −−
=−
−
( )
( )
u p
Rp
i i
iu i
i
,
.(
=
+ −
−
1
11
12 1
(2.30)
onde ry1, ry2
e ry3são variáveis aleatórias de distribuição uniforme, média nula e amplitude
máxima a1=0,075%.x2max, a2 = 0,25%Qomax e a3=0,5%Qimax, respectivamente. Estas variáveisforam incluídas no modelo para simular o efeito do ruído de medição observado (Pereira,1996).

61
As condições de intertravamento são modeladas pelas constantes da seguinte forma:
kse x xse x xfba
max
max1
1 1
1 1
10
=>≤
ou se ocorrer falha na bomba BA1
se nao ocorrer falha na bomba BA1
~ (2.31)
kse x xse x xfba
max
max2
2 2
2 2
1 0 040
=≤≥
. .~
ou se ocorrer falha na bomba BA2
se nao ocorrer falha na bomba BA2
(2.32)
Kse x h
se x hbba
ba2
2 2
2 2
0
1=
≤
>
(2.33)
Com este modelo é possível simular as diversas falhas resumidas na tabela 2.
Tabela 2: Tipo de falhas no sistema de tanques interativos
Tipo de FalhaParâmetroIndicador da Falha
definiçãodo Parâmetro
agarramento da válvula CV-1 kfcv1 {0,1}agarramento da válvula CV-2 kfcv2 {0,1}
desligamento da bomba BA-01 kba1 {0,1}desligamento da bomba BA-02 kba2 {0,1}
entupimento no duto entre TQ-1 e TQ-2 kfe12 [0,1]entupimento no duto entre TQ-3 e TQ-1 kfe31 [0,1]entupimento no duto entre TQ-2 e TQ-3 kfe23 [0,1]vazamento no duto entre TQ-2 e TQ-3 kfv23 [0,1]
falha no sensor de nível de TQ-3 kfy1 {0,1}falha no sensor de vazão de saída de TQ-3 kfy2 {0,1}
Falha no sensor de vazão de entrada de TQ-2 kfy3 {0,1}
2.3.5 - RESULTADOS DE SIMULAÇÕES DE FALHAS NO SISTEMA DE TANQUES INTERATIVOS
A figura 2.11 mostra as curvas das variáveis de entrada, sinais de controle, e saída do sistemade tanques interativos quando ocorre um entupimento no duto de conexão de TQ-3 para TQ-1em t=500 segundos. A intensidade do entupimento é kfe31=0,79. Na prática essa situação podeser efetuada através do fechamento da válvula FV-7. Quando ocorre o entupimento ocontrolador de vazão de saída de TQ-3 tende a compensar o efeito abrindo mais a válvulaFCV-2. Para este caso simulado, a vazão máxima de água que pode fluir na tubulação éinferior à vazão desejada para compensar o efeito do entupimento, valor do setpoint, com istoa malha de vazão não é controlada. Nota-se que a vazão de entrada de TQ-2 também sofreuredução, para permitir o controle de nível de TQ-3, via fechamento da válvula FCV-1. Paraentupimentos de menor intensidade, por exemplo kfe31=0,11, a vazão de saída de TQ-3 não éalterada, figura 2.12. A figura 2.13 mostra a situação onde ocorre uma falha no sensor de

62
vazão de saída, interrupção total do sinal transmitido do sensor para o PLC. Após a ocorrênciada falha a leitura do sensor de vazão FE-2 é nula. Isto faz com que o controlador de vazãoabra a válvula FCV-1 para tentar fazer com que a vazão medida seja igual ao setpoint. Istoacarreta um aumento da vazão de saída real, que não é o valor medido, e consequentementeaumenta a vazão de entrada de TQ-2, para efetuar o controle do nível de TQ-3. Outrosresultados simulados com o modelo são apresentados em (Pereira, 1996; Camargo, 1997),onde também são apresentados resultados experimentais obtidos na planta piloto.
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
u1u2
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500 2000
t(s)
y1y1ref
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y2y2ref
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y3
Fig. 2.11 - Curvas das variáveis de entrada e saída do STIpara entupimento entre TQ-3 e TQ-1 com kfe31=0.79.

63
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
u1u2
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y1
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y2
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y3
Fig. 2.12 - Curvas das variáveis de entrada e saída do STIpara entupimento entre TQ-3 e TQ-1 com kfe31=0.11.
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
u1u2
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y1y2ref
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y2
y2ref
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500
t(s)
y3
Fig. 2.13 - Curvas das variáveis de saída e entrada do STIpara falha no sensor de vazão de saída de TQ-3 e TQ-1.

64
EXRCÍCIO
Implementar os modelos apresentados e simular as falhas relacionadas nas tabelas1 e 2.
REFERÊNCIAS BIBLIOGRÁFICAS
Aguirre, L. A.; Pereira, M. F. S. & Guimarães, R. A. (1996). “Instrument Fault Detection andIsolation in a Tank System”. XI Congresso Brasileiro de Automática, pp. 647-652, SãoPaulo, Brazil.
Bose, B.K. Power Electronic A.C. Drives, Prentice Hall, New Jersy, 1986.
Braga, A. R. (1994). “Implementação de Estratégias de Controle Multimalha eMultivariável”. Dissertação de Mestrado, Programa de Pós-Graduação em EngenhariaElétrica, Universidade Federal de Minas Gerais, Belo Horizonte/MG, Brasil.
Camargo, H. A. (1997). “Detecção e Isolação de Falhas Utilizando Estimação de Parâmetrosde Modelos Contínuos e Limites de Confiança Adaptativos - Aplicação a uma PlantaPiloto”. Dissertação de Mestrado, Programa de Pós-Graduação em EngenhariaElétrica, Universidade Federal de Minas Gerais, Belo Horizonte/MG, Brasil.
Caminhas, W. M.; Pereira, M. F. S.; Aguirre, L. A.; Tavares, H. M. F. & Gomide, F. A. C.(1997). “Detecção e Identificação de Falhas de Instrumentação num Sistema de TanquesInterativos Usando Rede Neurofuzzy”. Anais do 3o. Congresso Brasileiro de RedesNeurais, pp. 201-206, Curitiba-Paraná, Brasil.
Caminhas, W. M “Estratégias de Detecção e Diagnóstico de Falhas em Sistema Dinâmicos”.Tese de Doutorado – FEEC - Unicamp, 1997, 160 páginas.
Jota, F. G.; Braga, A. R. & Pena, R. T. (1195). “Performance Assessment of AdvancedProcess Control Algorithms Using an Interacting Tank System”. IEEE IndustryApplications Society, 30th Annual Meeting, Orlando, Florida, October 8-12.
Krause, P. C., Analysis of Electric Machinery, Mc Graw-Hill Book Company, New York,1986.
Pereira, M. F. S. (1996). “Desenvolvimento e Aplicação de um Método de Detecção eIdentificação de Falhas Baseado em Observadores Dedicados”. Dissertação de Mestrado,Programa de Pós-Graduação em Engenharia Elétrica, Universidade Federal de MinasGerais, Belo Horizonte/MG, Brasil.
Silvino, J. L.; Bottura, C.P. & Resende, P. (1993) “Observadores de Fluxo e Estimação deParâmetros da Máquina de Indução Via Modelamento Discreto Não-Estacionário”.Revista Controle & Automação, vol. 4 n. 6, pp. 11-22.





























