Embed Size (px)
Citation preview

Automatique H. Garnier 1
Hugues GARNIER
Version du 9 septembre 2018
Automatique ------
Modélisation mathématique des systèmes

Automatique H. Garnier 2
Plan du cours
① Introduction à l’Automatique ② Modélisation mathématique des systèmes
• Propriétés des systèmes : linéarité et invariance dans le temps • Linéarisation • Transformée de Laplace – Rappels • Réponses temporelles des systèmes linéaires • Fonction de transfert • Algèbre des schémas-blocs
③ Analyse temporelle et fréquentielle des systèmes ④ Stabilité des systèmes ⑤ Systèmes bouclés : commande, stabilité et performances ⑥ Correcteurs standards et leurs réglages

Automatique H. Garnier 3
Etapes de conception d’une commande en boucle fermée
Stabilité, caractéristiques principales
Modélisation
Analyse
Synthèse du régulateur
Analyse
Objectifs atteints ?
Objectifs/performances
à atteindre Système
à réguler/asservir
Fonction de transfert
Stabilité, précision, rapidité, robustesse
Paramètres du régulateur
OUI
NON

Automatique H. Garnier 4
Définition - Signal
• Un signal est la grandeur physique porteuse d’une information
Exemples : position, vitesse, température, ECG,…

Automatique H. Garnier 5
Quelques signaux importants
• L'échelon unité
• La rampe unitaire
• La fenêtre rectangulaire
r(t) = 0 pour t < 0t pour t ≥ 0⎧⎨⎩
Γ( t) = 0 pour t < 01 pour t ≥ 0⎧⎨⎩
(t)
t 0
Γ
1
r(t)
t 0 1
1
rect tT⎛
⎝⎜
⎞
⎠⎟ =
1 ∀ t ≤ T2
0 ∀ t > T2
0
rect (t/T) 1
2 T 2 T -
Aire = T

Automatique H. Garnier 6
• L'impulsion de Dirac
δ(t) n’est pas une fonction. C’est un “être” à valeur infinie en un point et à valeur nulle partout ailleurs Par convention, la représentation graphique de δ(t) est une flèche verticale placée en t=0 de hauteur proportionnelle à la constante de pondération ici égale à 1.
δ( t ) = limT→0
1TRect t
T⎛
⎝⎜
⎞
⎠⎟
t 0
Rect (t/T)
2 T
2 T -
T 1
T 1
Aire=1
t 0
δ(t)
1 δ( t )dt =1
−∞
+∞
∫
Quelques signaux importants

Automatique H. Garnier 7
Définition - Système
• C’est l’objet que l’on désire étudier possédant un ou des signaux d’entrée et un ou des signaux de sortie Exemples : voiture, avion, circuit électrique, bras de robot,…
• En automatique, on représente un système par un schéma fonctionnel
Système entrée sortie

Automatique H. Garnier 8
Classification des systèmes
Systèmes
biologiques écologiques sociaux,…
vivants
évolutifs, difficile
à prévoir ou contrôler
modèles peu précis
naturels artificiels
construits par l’homme : mécaniques,…
comportement choisi, facile à prévoir ou
contrôler
modèles précis
environnementaux,
…
comportement subi, plus ou moins facile à prévoir ou
contrôler
modèles assez précis

Automatique H. Garnier 9
Définition - Système statique (ou instantanée)
• C’est un système dont l’état (ensemble de grandeurs suffisant à qualifier le système) à un instant donné ne dépend que de l’entrée à cet instant
– Un système statique est dit sans mémoire car sa sortie à l’instant t ne dépend que des valeurs de l’entrée à l’instant t
• L’étude d’un système statique nécessite la connaissance de : – sa loi d’évolution, qui prend la forme d’une équation algébrique du
type y(t)=f [x(t)]
• Exemples : y(t)=R x(t)
y(t ) = 2x2(t )5cos x(t )( )+1
Automatique H. Garnier 10
Définition - Système dynamique
• C’est un système dont l’état (ensemble de grandeurs suffisant à qualifier le système) évolue en fonction du temps
– Un système dynamique est dit à mémoire car sa sortie dépend de ses valeurs et de celles de l’entrée dans le passé
• L’étude d’un système dynamique nécessite la connaissance de : – sa loi d’évolution, qui prend la forme d’une équation différentielle – son état initial, c’est-à-dire son état à l’instant t=0
• Exemples – Bras de robot rigide
– circuit RC
ml2 d2θ( t )dt2
+mgl sinθ( t ) = u(t ) θ(0 ) =15°; !θ(0 ) = 0
RC ds(t )dt
+ s(t ) = u(t ) s(t ) = 0

Automatique H. Garnier 11
Classification des systèmes dynamiques
Multivariables
Invariants dans le temps

Automatique H. Garnier 12
Propriétés des systèmes - Homogénéité • Un système est homogène
– si lorsque l’entrée x(t) provoque la sortie y(t), alors l’entrée α x(t) provoque la sortie α y(t)
– L’homogénéité révèle une relation de proportionnalité entre l’entrée et la sortie d’un système
• Exemple :
• Contre-exemple :
Système x(t) y(t)
Système α x(t) α y(t)
d2y(t )
dt2+2 dy(t )
dt+3y(t ) = 4 dx(t )
dt+5x(t )
d2y(t )
dt2+2 dy(t )
dt+3y(t ) = 4 dx(t )
dt+5x(t )+6
homogénéité
Automatique H. Garnier 13
Exemple - Vérification
• Replaçons x(t) par α x(t) et y(t) par α y(t)
• α étant constant
• On obtient donc l’équation initiale mais multipliée par α . • La réponse du système à une entrée α x(t) est α y(t). Le système est
donc bien homogène
d2y(t )
dt2+2 dy(t )
dt+3y(t ) = 4 dx(t )
dt+5x(t )
d2αy(t )
dt2+2 dαy(t )
dt+3αy(t ) = 4 dαx(t )
dt+5αx(t )
αd2y(t )
dt2+2 dy(t )
dt+3y(t )
⎛
⎝⎜⎜
⎞
⎠⎟⎟ =α 4 dx(t )
dt+5x(t )
⎛
⎝⎜
⎞
⎠⎟

Automatique H. Garnier 14
Contre-exemple - Vérification
• Replaçons x(t) par α x(t) et y(t) par α y(t)
• α étant constant
• On n’obtient donc pas l’équation initiale multipliée par α. • La réponse du système à une entrée α x(t) n’est pas α y(t). Le système
n’est donc pas homogène (et ne sera en conséquence pas linéaire non plus)
d2y(t )
dt2+2 dy(t )
dt+3y(t ) = 4 dx(t )
dt+5x(t )+6
d2αy(t )
dt2+2 dαy(t )
dt+3αy(t ) = 4 dαx(t )
dt+5αx(t )+6
αd2y(t )
dt2+2 dy(t )
dt+3y(t )
⎛
⎝⎜⎜
⎞
⎠⎟⎟ =α 4 dx(t )
dt+5x(t )
⎛
⎝⎜
⎞
⎠⎟+6

Automatique H. Garnier 15
Propriétés des systèmes - Additivité • Un système est additif (ou relève du principe de superposition)
– si pour n’importe quelle paire d’entrée x1(t) et x2(t), la réponse du système à x1(t)+x2(t) est égale à la somme des réponses à l’entrée x1(t) et à l’entrée x2(t)
– L’additivité révèle la superposition des causes et des effets
Système x1(t) y1(t)
Système additivité
Système x2(t) y2(t)
y1(t)+y2(t) y1(t)+y2(t)
+
+
x1(t)
x2(t)
x1(t)+x2(t)
+
+
Automatique H. Garnier 16
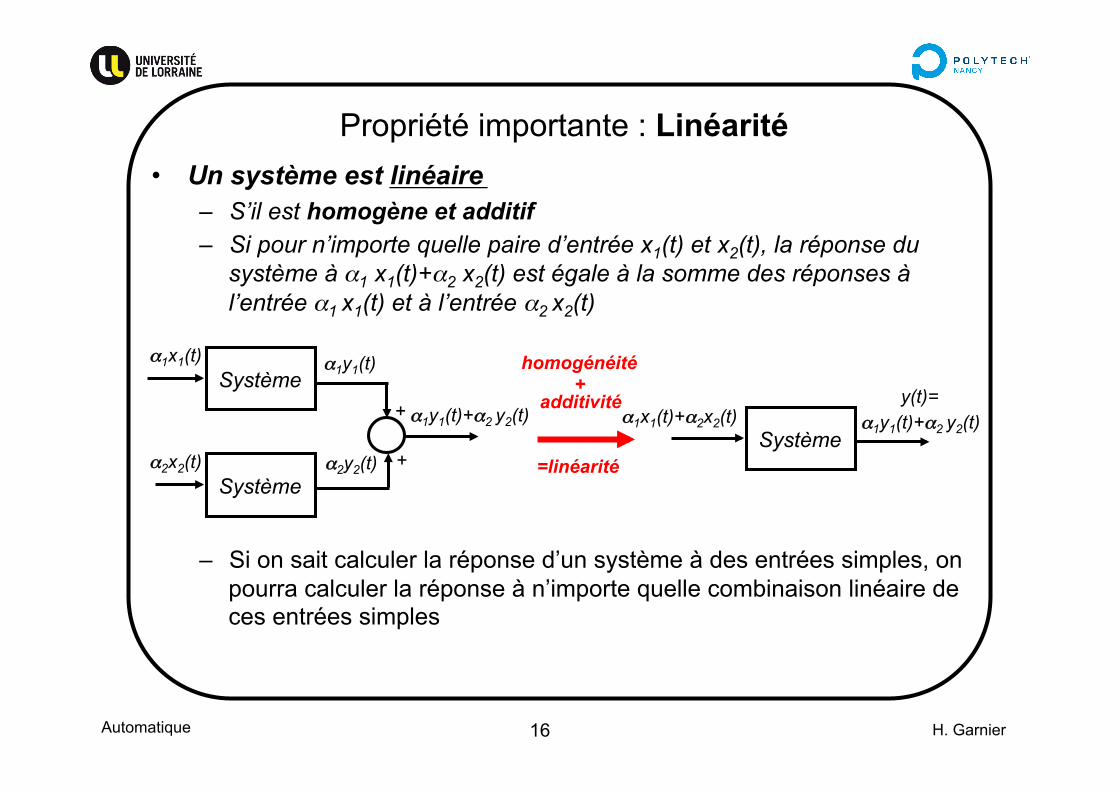
Propriété importante : Linéarité • Un système est linéaire
– S’il est homogène et additif – Si pour n’importe quelle paire d’entrée x1(t) et x2(t), la réponse du
système à α1 x1(t)+α2 x2(t) est égale à la somme des réponses à l’entrée α1 x1(t) et à l’entrée α2 x2(t)
– Si on sait calculer la réponse d’un système à des entrées simples, on
pourra calculer la réponse à n’importe quelle combinaison linéaire de ces entrées simples
Système α1x1(t)+α2x2(t)
homogénéité +
additivité y(t)= α1y1(t)+α2 y2(t)
=linéarité
Système α1x1(t) α1y1(t)
Système α2x2(t) α2y2(t)
α1y1(t)+α2 y2(t)
+
+

Automatique H. Garnier 17
Test rapide pour vérifier la linéarité d’un système • Soit un système dynamique décrit par son équation différentielle,
ce système est linéaire si – au niveau des variables (entrée ou sortie (E/S) et leurs dérivées) de
son équation différentielle ne figurent : • aucune fonction non linéaire des variables d’E/S (sin(x(t)),…) • aucune puissance supérieure à un des variables d’E/S (x2(t), …) • aucun terme croisé des variables d’E/S (y(t)x(t), …)
• Exemple :
• Contre-exemples :
dy(t )dt
+2y(t )x(t ) = x(t )
dy(t )dt
+4y2(t ) = x(t )
d2y(t )
dt2+5cos y(t )( ) = 2x(t )
d2y(t )
dt2+10 dy(t )
dt+ y(t ) = 2x(t )
y(t ) = x2(t )

Automatique H. Garnier 18
Contre-exemple - Vérification
Système x1(t) y1(t)
Linéarité ?
Système x2(t) y2(t)
y1(t)+y2(t)
+
+
y(t ) = x2(t )
y1(t ) = x12(t )
y2(t ) = x22(t )
y1(t )+ y2(t ) = x12(t )+ x2
2(t )
y(t ) = x1(t )+ x2(t )( )2
y(t ) = x12(t )+2x1(t )x2(t )x2
2(t )y(t ) ≠ y1(t )+ y2(t )
Système y1(t)+y2(t)
x1(t)
x2(t)
x1(t)+x2(t)
+
+
Automatique H. Garnier 19
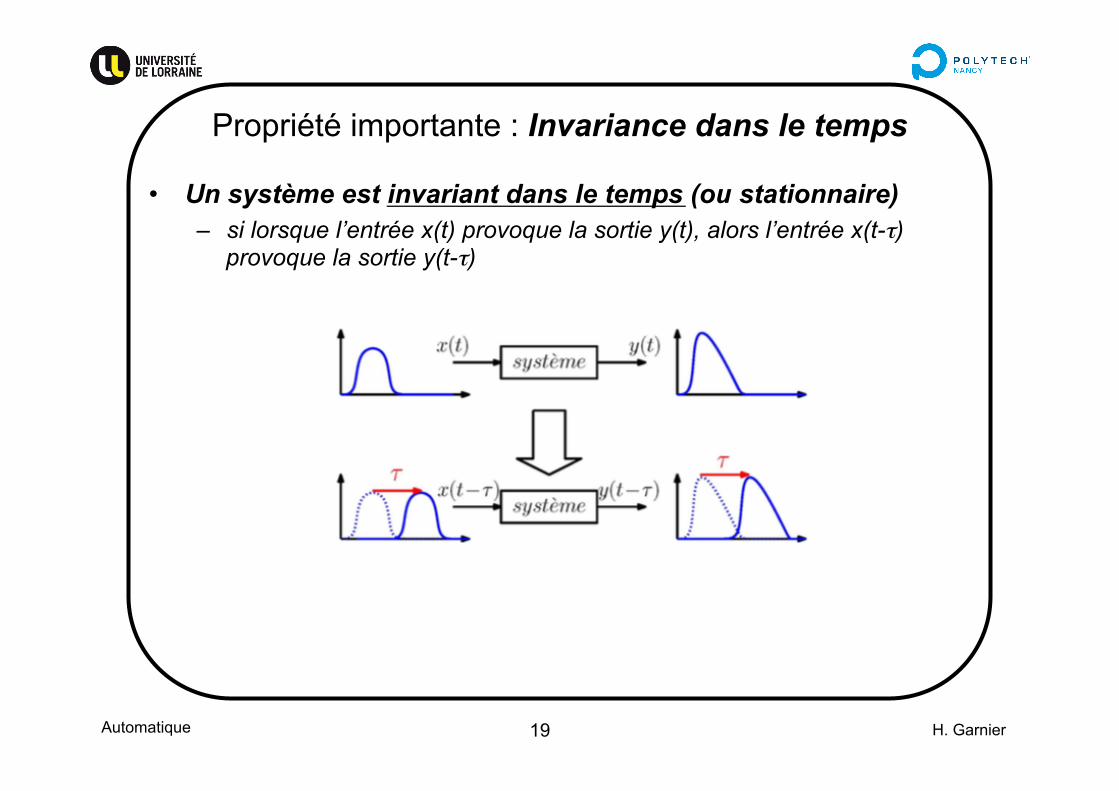
Propriété importante : Invariance dans le temps
• Un système est invariant dans le temps (ou stationnaire) – si lorsque l’entrée x(t) provoque la sortie y(t), alors l’entrée x(t-τ)
provoque la sortie y(t-τ)

Automatique H. Garnier 20
Test rapide pour vérifier l’invariance dans le temps d’un système
• Soit un système dynamique décrit par son équation différentielle, ce système est invariant dans le temps (ou stationnaire) – si les coefficients pondérant les variables (entrée ou sortie et leurs
dérivées) de son équation différentielle ne dépendent pas du temps t – Si les variables ne dépendent que du temps t (pas de –t, t2,… )
• Exemples :
• Contre-exemples :
t dy(t )dt
+2y(t ) = x(t )
RC dy(t )dt
+ y(t ) = e(t )
a0(t )y(t )+a1(t )dy(t )dt
+…+an(t )dny(t )
dtn= b0(t )x(t )+b1(t )
dx(t )dt
+…+bm(t )dmx(t )
dtm
a0y(t )+a1dy(t )dt
+…+andny(t )
dtn= b0x(t )+b1
dx(t )dt
+…+bmdmx(t )
dtm
dy(t )dt
+2y(t ) = x(−t )
Automatique H. Garnier 21
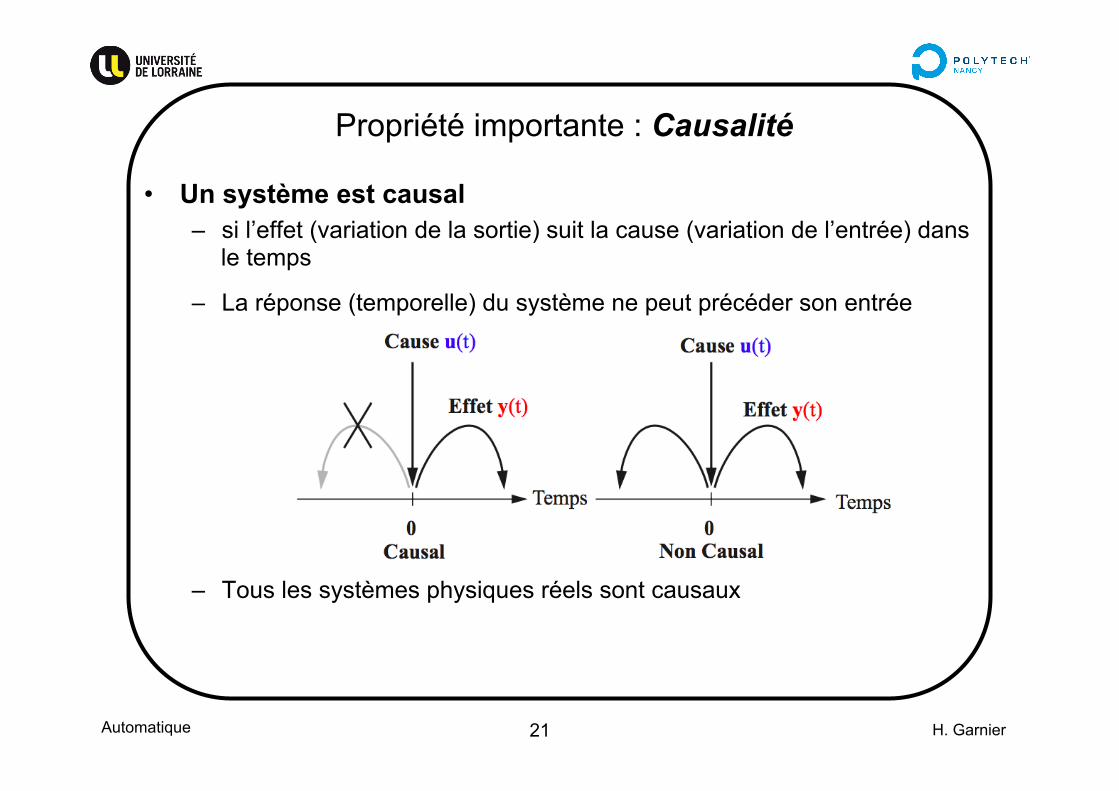
Propriété importante : Causalité
• Un système est causal – si l’effet (variation de la sortie) suit la cause (variation de l’entrée) dans
le temps
– La réponse (temporelle) du système ne peut précéder son entrée
– Tous les systèmes physiques réels sont causaux

Automatique H. Garnier 22
Test rapide pour vérifier la causalité d’un système
• Soit un système dynamique décrit par son équation différentielle, ce système est causal (ou propre) si – l’ordre de dérivation maximal n de la sortie dans son équation
différentielle est supérieur ou égal à l’ordre de dérivation maximal m de l’entrée
– n>m, le système est dit strictement causal ou strictement propre
• Exemple :
• Contre-exemple :
dy(t )dt
+4y(t ) = d3x(t )
dt3
d2y(t )
dt2+10 dy(t )
dt+ y(t ) = 2x(t )
a0y(t )+a1dy(t )dt
+…+andny(t )
dtn= b0x(t )+b1
dx(t )dt
+…+bmdmx(t )
dtmn ≥m

Automatique H. Garnier 23
Système linéaire invariant dans le temps (LTI) et causal
• Un système dynamique d’entrée x(t) et de sortie y(t) décrit par une équation différentielle linéaire à coefficients constants :
est linéaire, invariant dans le temps (LTI) et causal « Linear systems are important because we can solve them », Richard Feynman
Dans la suite du cours, on supposera que les systèmes dynamiques sont LTI et causal
Visionner la vidéo de Brian Douglas : Control Systems Lectures-LTI Systems
a0y(t )+a1dy(t )dt
+…+andny(t )
dtn= b0x(t )+b1
dx(t )dt
+…+bmdmx(t )
dtmn ≥m

Automatique H. Garnier 24
Systèmes LTI - Exemples
• Déterminer, en justifiant, si les systèmes ci-dessous sont linéaires et invariants dans le temps (voir aussi TD n°1)
Automatique H. Garnier 25
Caractéristiques de tous les systèmes physiques réels
• Les systèmes physiques réels ne sont : – ni linéaires – ni invariants dans le temps
• Tous les systèmes physiques présentent en effet un caractère non linéaire et varient au cours du temps

Automatique H. Garnier 26
Caractéristique statique d’un système dynamique
• Régime transitoire/permanent d’un système
• Caractéristique statique – Soit un système dynamique ayant une entrée x(t) et une sortie y(t). La
caractéristique statique consiste à tracer les valeurs de la sortie y(t) en fonction de celles de l’entrée x(t) en régime permanent (ou statique)
Automatique H. Garnier 27
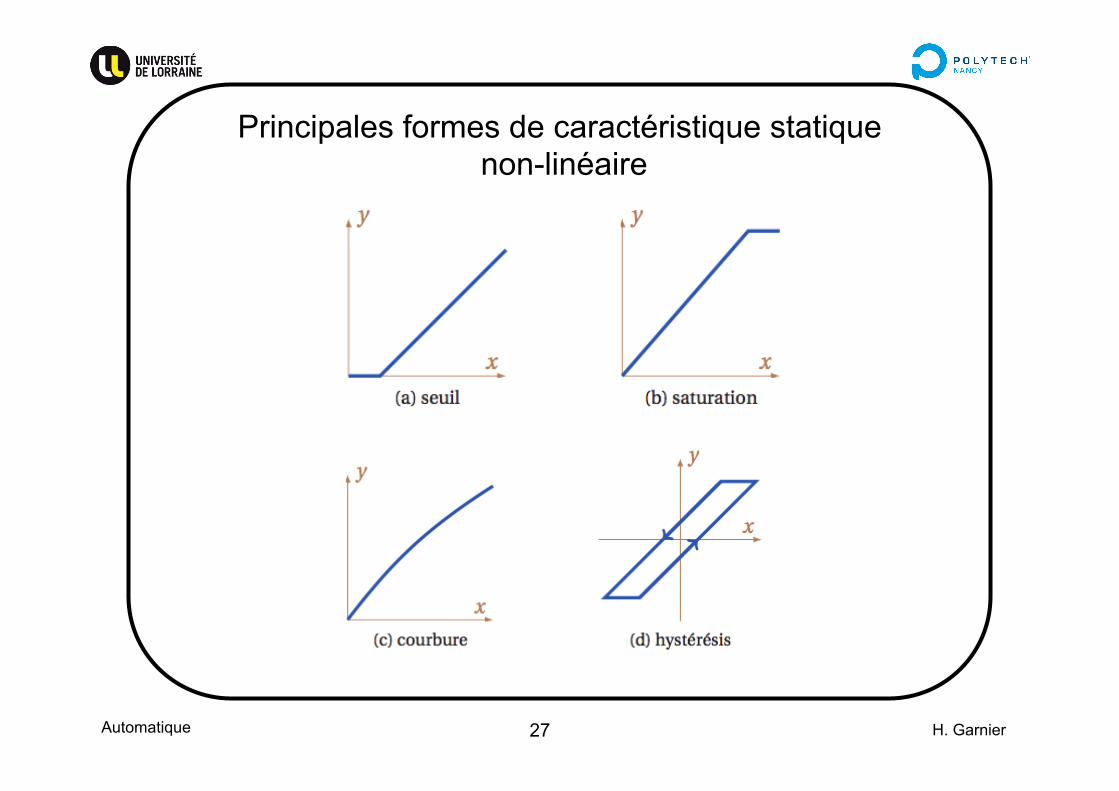
Principales formes de caractéristique statique non-linéaire

Automatique H. Garnier 28
Principales non-linéarités • Seuil
– Un système présente un seuil si la sortie n’évolue que lorsque l’entrée dépasse une valeur minimale (seuil). Les seuils ont souvent pour origine des frottements secs
• Saturation – Un système présente une saturation lorsque la sortie n’évolue plus au-delà
d’une valeur limite. Ces saturations sont dues soit aux limites mécaniques du système (butées) soit aux limites des interfaces de puissance (saturation des amplificateurs opérationnels)
• Courbure – La quasi totalité des systèmes présente des courbures plus ou moins
prononcées. Dans la plupart des cas le système est approché par une droite passant par l’origine, mais il est aussi possible de linéariser autour d’un point de fonctionnement.
• Hystérésis – Un système présente une réponse avec une hystérésis lorsque le
comportement est différent suivant le sens d’évolution de la variable d’entrée
•

Automatique H. Garnier 29
Linéarisation autour d’un point de fonctionnement
• Tous les systèmes physiques présentent un caractère non linéaire et varient plus ou moins lentement au cours du temps
• Il est possible de les considérer comme linéaires et invariants dans le temps autour d’un point de fonctionnement pour lequel les signaux d’entrée/sortie du système varient faiblement
x
y=f(x)
y0=f(x0)
x0
Automatique H. Garnier 30
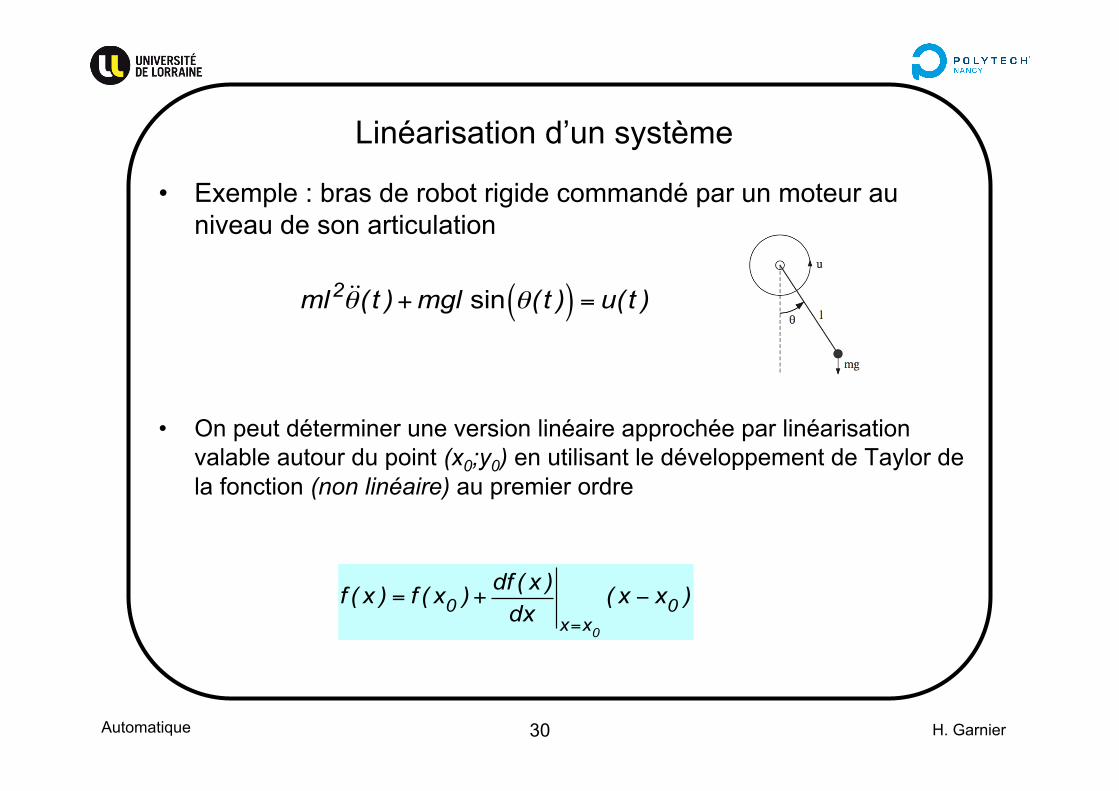
Linéarisation d’un système
• Exemple : bras de robot rigide commandé par un moteur au niveau de son articulation
• On peut déterminer une version linéaire approchée par linéarisation valable autour du point (x0;y0) en utilisant le développement de Taylor de la fonction (non linéaire) au premier ordre
ml2 !!θ( t )+mgl sin θ( t )( ) = u(t )
f ( x ) = f ( x0 )+df ( x )dx x=x0
( x − x0 )

Automatique H. Garnier 31
Rappel - Approximation affine d’une fonction dérivable en un point
• Soit une fonction f(x) dérivable en un point x0
• Une approximation affine de f(x) au voisinage de x=x0 est donnée par :
– Rq: cette approximation n’est valable qu’autour du point (x0;y0)
f ( x ) ≈ f '( x0 )( x − x0 )+ f ( x0 )
x
y=f(x)
y0=f(x0)
x0

Automatique H. Garnier 32
Linéarisation du modèle du bras de robot rigide
f (θ ) = f (θ0 )+ f '(θ0 )(θ −θ0 )sin(θ ) = sin(0 )+ cos(0 )(θ −0 ) =θ Autour de θ0 = 0, sin θ( t )( ) ≈ θ( t )
ml2 !!θ( t )+mgl θ( t ) = u(t )
f(θ)=sin(θ)
θ0=0 θ
Une approximation affine (linéaire ici) de f(θ)=sin(θ) au voisinage du point d’équilibre (θ0 ; f(θ0))=(0;0) est donnée par :
Modèle linéarisé du bras de robot
ml2 !!θ( t )+mgl sin θ( t )( ) = u(t )
Automatique H. Garnier 33
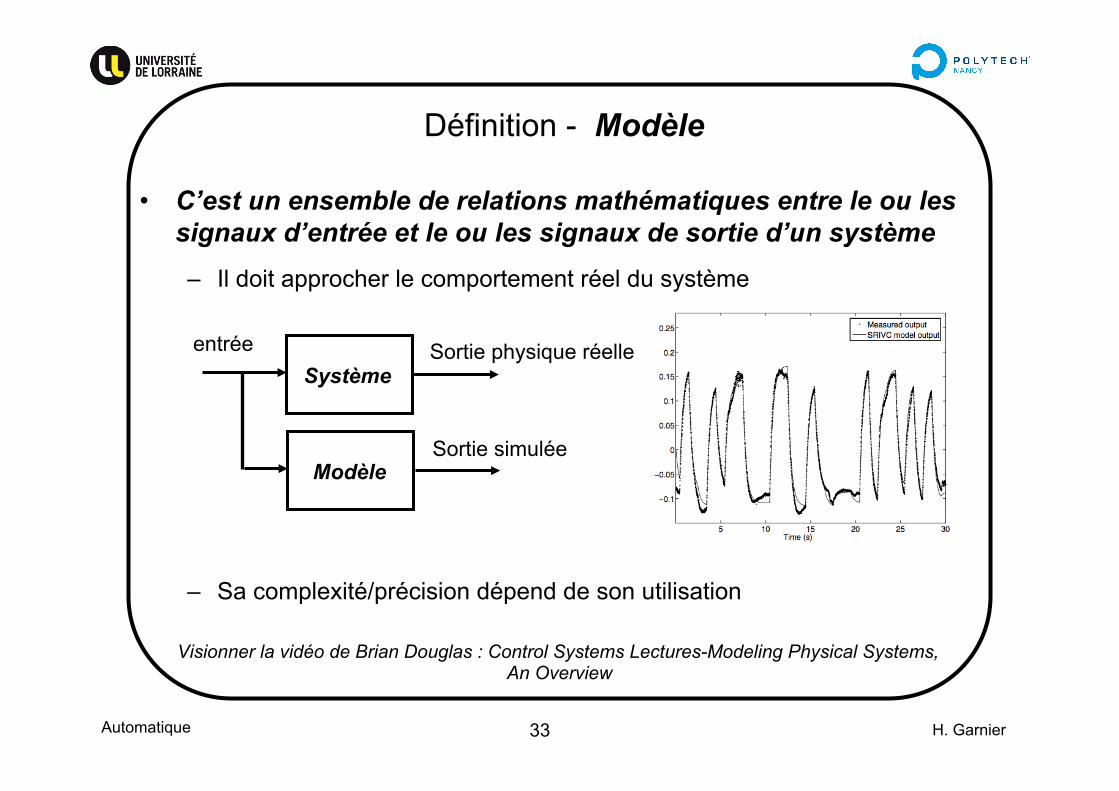
Définition - Modèle
• C’est un ensemble de relations mathématiques entre le ou les signaux d’entrée et le ou les signaux de sortie d’un système – Il doit approcher le comportement réel du système
– Sa complexité/précision dépend de son utilisation
entrée Sortie physique réelle
Sortie simulée
Système
Modèle
Visionner la vidéo de Brian Douglas : Control Systems Lectures-Modeling Physical Systems, An Overview

Automatique H. Garnier 34
Types de modèles & d’approches de modélisation
Système physique
Modèle de comportement
(dominant) Modèle de
connaissance
Déterminé analytiquement à partir des lois de la Physique
Déterminé expérimentalement à partir de signaux
d’E/S mesurés
Modélisation Physique
Identification des systèmes
Automatique H. Garnier 35
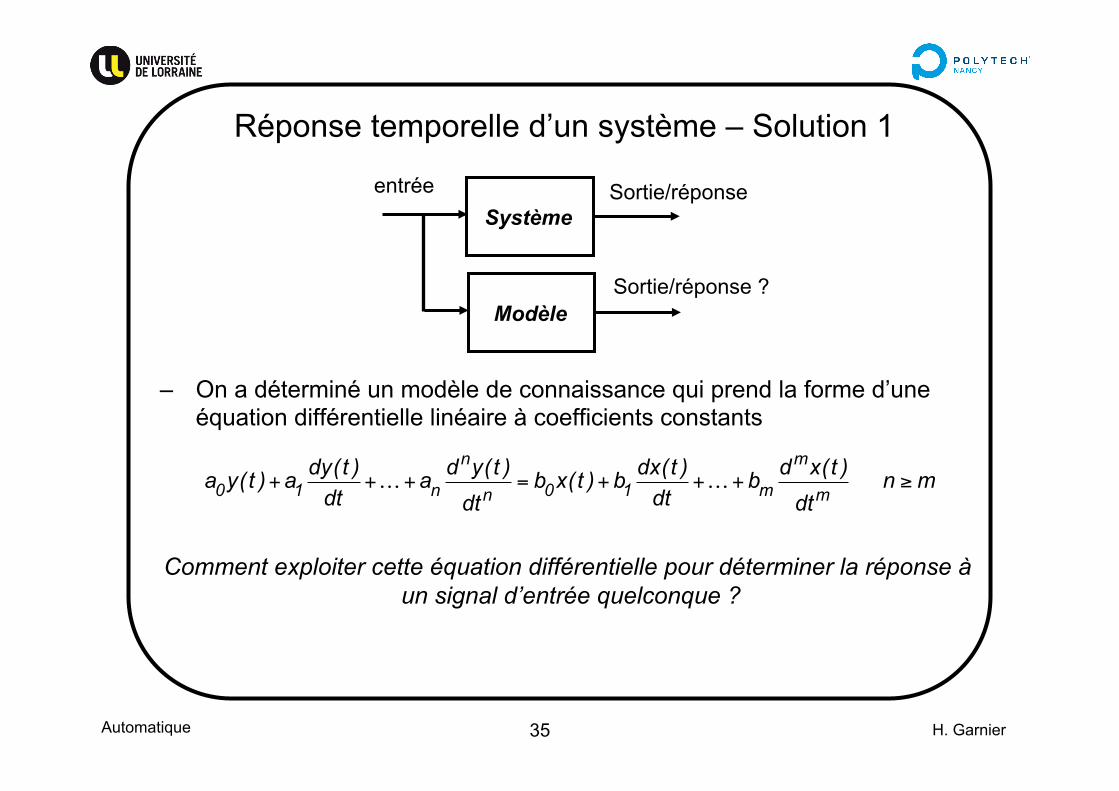
Réponse temporelle d’un système – Solution 1
– On a déterminé un modèle de connaissance qui prend la forme d’une équation différentielle linéaire à coefficients constants
Comment exploiter cette équation différentielle pour déterminer la réponse à un signal d’entrée quelconque ?
entrée Sortie/réponse
Sortie/réponse ?
Système
Modèle
a0y(t )+a1dy(t )dt
+…+andny(t )
dtn= b0x(t )+b1
dx(t )dt
+…+bmdmx(t )
dtmn ≥m

Automatique H. Garnier 36
R
C y(t) ? e(t ) = Γ( t )et y(0 ) = 0
y(t ) = 1−e−tRC
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟Γ( t )
Exemple : réponse indicielle d’un filtre RC
RC dy(t )dt
+ y(t ) = e(t )
Solution 1 - Il faut résoudre son équation différentielle !
On peut déterminer un modèle de connaissance qui prend la forme d’une équation différentielle linéaire à coefficients constants

Automatique H. Garnier 37
Réponse temporelle d’un système – Solution 2
– Supposons qu’on ait déterminé ou mesuré la réponse du système à une impulsion de Dirac
Comment exploiter cette réponse impulsionnelle pour déterminer la réponse
à un signal d’entrée quelconque ?
entrée Sortie/réponse
Sortie/réponse ?
Système
Modèle
t 0
1
δ(t)
Système t 0 t 0
g(t)

Automatique H. Garnier 38
• La réponse d’un système LTI à toute entrée x(t) peut être calculée à l’aide du produit de convolution entre la réponse impulsionnelle du système g(t) et l’entrée x(t)
– Si le système est causal : g(t)=0 pour tout t < 0
– La relation entrée/sortie via le produit de convolution est cependant
difficile à exploiter dans le domaine temporel car les calculs sont complexes
Réponse temporelle via le produit de convolution
y(t ) = g(t)*x(t)= g(t − τ ) x(τ )dτ-∞
+∞
∫
y(t ) = g(t)*x(t)= g(t − τ ) x(τ )dτ-∞
t
∫

Automatique H. Garnier 39
Propriétés du produit de convolution (rappels)
• Commutativité
• Associativité
• Distributivité sur « + » et « - »
• Elément neutre : impulsion de Dirac
x(t )* y(t ) = y(t )* x(t )
x(t )∗ y(t )+ z(t )( ) = x(t )∗ y(t )+ x(t )∗ z(t )
x(t )∗ y(t )* z(t )( ) = x(t )∗ y(t )( )∗ z(t ) = x(t )∗ y(t )∗ z(t )
x(t )∗δ( t ) = δ( t )∗ x(t ) = x(t )

Automatique H. Garnier 40
Convolution d’un signal par une impulsion de Dirac
• Convoluer un signal s(t) par une impulsion de Dirac positionnée en to revient à décaler le signal de to
s(t )∗δ( t − to ) = s(t − to )
t0 t0
1
)tt( 0−δ
t0
s(t)
t0 t0
)tt(*)t(s)tt(s 00 −δ=−

Automatique H. Garnier 41
R
C y(t) ? e(t ) = Γ( t )et y(0 ) = 0
y(t ) = 1−e−tRC
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟Γ( t )
Exemple : réponse indicielle d’un filtre RC
Solution 2 - Il faut calculer un produit de convolution. Calculs compliqués !
A partir de la réponse impulsionnelle du filtre g(t ) = 1RC
e−tRCΓ( t )
y(t ) = g(t)*x(t)= g(t − τ ) x(τ )dτ-∞
+∞
∫
Solution 3 – Exploiter la transformée de Laplace. Calculs plus simples !

Automatique H. Garnier 42
Résolution d’équations différentielles à l’aide de la transformée de Laplace
• Résoudre une équation différentielle d’ordre > à 2 à l’aide des méthodes classiques est souvent compliquée – Il est avantageux d’utiliser une procédure s’appuyant sur la
transformée de Laplace (TL)
• La procédure de résolution est alors la suivante : 1. Appliquer la TL aux 2 membres de l’équation différentielle en y(t) en
tenant compte des conditions initiales des signaux
2. Calculer Y(s) en utilisant les propriétés et la table de TL
3. Décomposer Y(s) en éléments simples
4. Utiliser la table de transformées pour obtenir y(t) par transformée inverse

Automatique H. Garnier 43
Pierre-Simon LAPLACE
• 23 mars 1749 - 5 mars 1827
• Grand scientifique français
• A profondément influencé les mathématiques, l’astronomie, la physique et la philosophie des sciences de son siècle
• La transformée qui porte son nom facilite grandement l’analyse des systèmes à temps continu
Visionner la vidéo de Brian Douglas : Control Systems Lectures-The Laplace Transform and the Important Role it Plays

Automatique H. Garnier 44
• Soit un signal à temps continu x(t) causal, la transformée de Laplace de x(t) est définie par :
où – s est la variable de Laplace (parfois notée p) – s est complexe : s= α+jω
• On dit que X(s) est la transformée de Laplace du signal x(t)
Définition
L x(t)( )=X s( ) = x(t ) e−st dt0
+∞
∫
x(t)
t 0
Signal à temps continu
Automatique H. Garnier 45
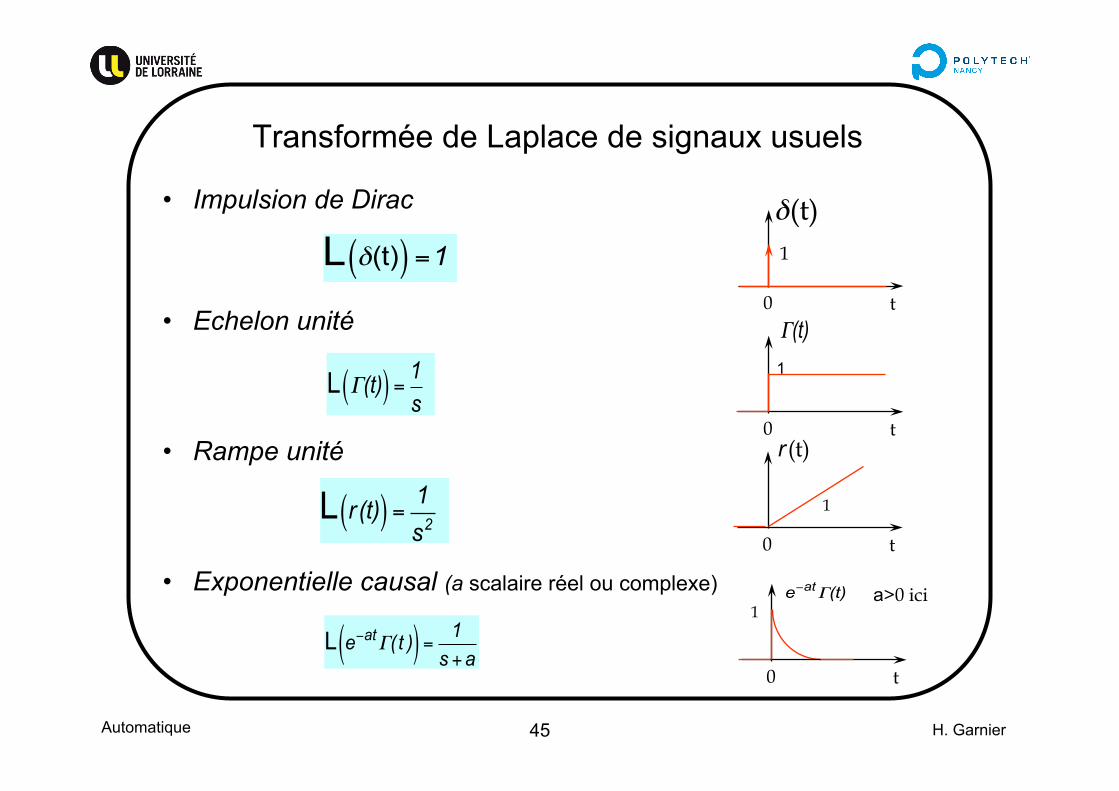
• Impulsion de Dirac
• Echelon unité
• Rampe unité
• Exponentielle causal (a scalaire réel ou complexe)
Transformée de Laplace de signaux usuels
L Γ(t)( ) = 1s
t 0
1
Γ(t)
L δ(t)( ) = 1
L r (t)( ) = 1s2
t 0
1
r (t)
L e−atΓ( t )( ) = 1s +a
1
t 0
t 0
1
δ(t)
a>0 ici e−atΓ(t)
Automatique H. Garnier 46
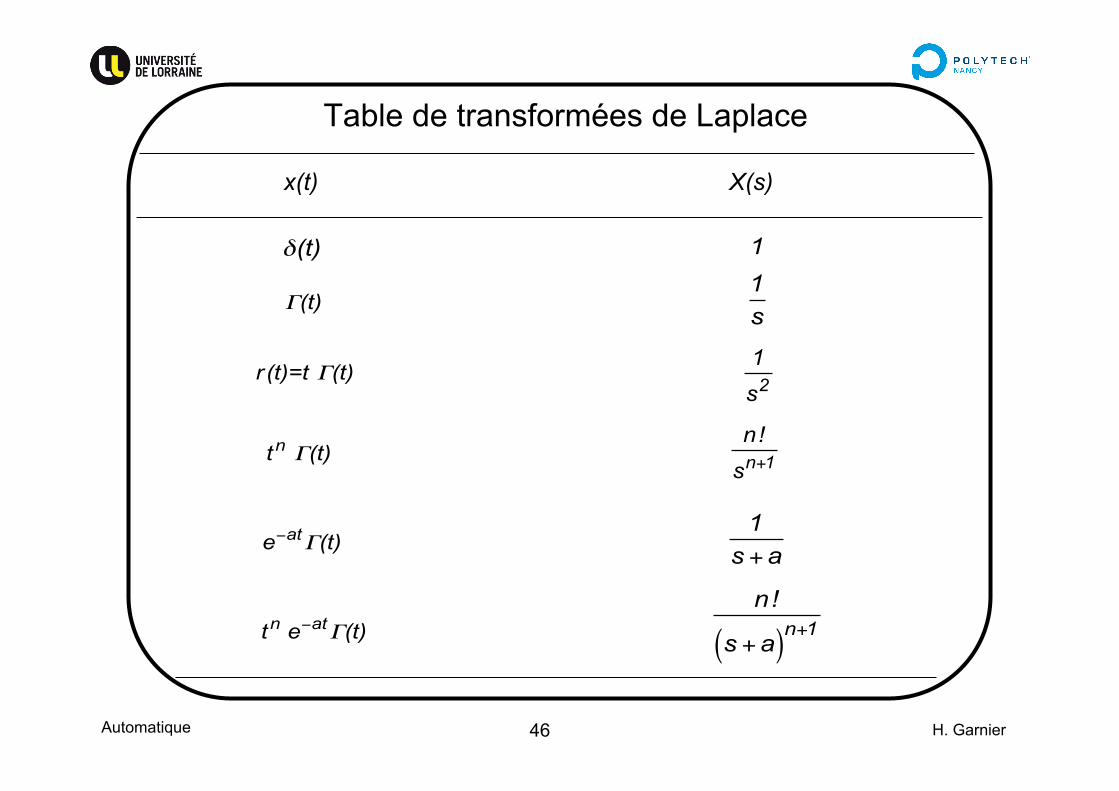
Table de transformées de Laplace
x(t) X(s)
1s +ae−atΓ(t)
Γ(t)
δ(t)1s
1
r (t)=t Γ(t)1s2
tn Γ(t)n!sn+1
n!
s +a( )n+1tn e−atΓ(t)

Automatique H. Garnier 47
Table de transformées de Laplace
x(t) X(s)
ωos2 +ωo
2 sin ωot( )Γ(t)
cos ωot( )Γ(t)s
s2 +ωo2
ωo
s +a( )2 +ωo2 e−at sin ωot( )Γ(t)
s +a
s +a( )2 +ωo2 e−at cos ωot( )Γ(t)

Automatique H. Garnier 48
• Linéarité
• Dérivation par rapport au temps
Quelques propriétés importantes de la transformée de Laplace
L a x(t)( ) = a X(s)
L a x(t)+b y(t)( ) = a X(s)+b Y(s)
L dx(t )dt
⎛
⎝⎜
⎞
⎠⎟ = sX(s )− x(0 )
L dnx(t )
dtn
⎛
⎝⎜⎜
⎞
⎠⎟⎟ = s
nX(s )− sn−1x(0 )− sn−2x(1)(0 )−…− sx(n−2 )(0 )− x(n−1)(0 )
L d2x(t )
dt2
⎛
⎝⎜⎜
⎞
⎠⎟⎟ = s
2X(s )− sx(0 )− !x(0 )

Automatique H. Garnier 49
• Théorème du retard
– Déterminer L(rect(t-0.5))
• Changement d’échelle
– Déterminer L(r(2t))
• Produit par le temps – Déterminer L(tcos(ω0t))
L x(t − t0 )( ) = e-st0 X s( )
L x(at)( ) = 1a
X sa
!
"#$
%&
L t x(t )( ) = −dX(s )ds
Quelques propriétés importantes de la transformée de Laplace

Automatique H. Garnier 50
• Produit de convolution
• Théorème de la valeur initiale
• Théorème de la valeur finale
x(t)*y(t)= x(τ ) y(t − τ )dτ0
+∞
∫L x(t)*y(t)( ) = X(s)×Y(s)
x(0+ ) = lims→+∞
sX(s)
limt→+∞
x(t)( ) = lims→0
sX(s) Si la limite existe
Quelques propriétés importantes de la transformée de Laplace
Exemple : x(t)=e−2tΓ(t) X(s ) = s
s2 +ωo2
Contre −exemple : x(t)=cos ωot( )Γ(t)X(s ) = 1
s +2

Automatique H. Garnier 51
• Le problème consiste à retrouver le signal x(t) à partir de X(s)
• Utilisation de la définition à partir de l’intégrale
Formule compliquée ! On évite de l’utiliser
• La transformée de Laplace inverse est un opérateur linéaire On va exploiter cette propriété
Transformée de Laplace inverse
L−1 X(s)( ) = x(t)
L-1 X s( )( )=x(t) = 12π j
X(s ) est dsσ − j∞
σ+ j∞
∫
L−1 a X(s)+b Y(s)( ) = aL−1 X(s)( )+bL−1 Y(s)( )= a x(t)+b y(t)
Automatique H. Garnier 52
• Exploitation directe de la table de transformées de Laplace
– On essaie de mettre la transformée de Laplace sous une forme donnée dans la table
• Exemples
Transformée de Laplace inverse dans le cas de formes simples
X(s) = 3s +2
x(t)=3e−2tΓ( t ) Y(s) = 42s +1
=4
2 s + 12
⎛
⎝⎜
⎞
⎠⎟
y(t)=2e−12tΓ( t )
Y(s) = 42s +1

Automatique H. Garnier 53
• Exploitation directe de la table de transformées de Laplace
– On essaie de mettre la transformée de Laplace sous une forme donnée dans la table
• Exemples (suite) :
Transformée de Laplace inverse dans le cas de formes simples
X(s) = 2
s +4( )3
x(t)=t2 e−4t Γ( t )
Y(s) = 4s2 +16
y(t)=sin(4t ) Γ( t )
Y(s) = 4s2 +16
=4
s2 +42

Automatique H. Garnier 54
• La méthode consiste à décomposer en éléments simples Y(s) et à exploiter ensuite la table de transformées de Laplace
Transformée de Laplace inverse par décomposition en éléments simples
y(t)=L-1 A1s − s1
⎡
⎣⎢
⎤
⎦⎥+…+L-1 An
s − sn
⎡
⎣⎢
⎤
⎦⎥
= A1es1tΓ( t )+…+ Ane
sntΓ( t ) Ai : scalaire réel ou complexe
Y(s ) =bi s
i
i=0
m∑
(s − s1 )(s − s2 )...(s − sn )=
A1s − s1
+A2s − s2
+!+Ans − sn

Automatique H. Garnier 55
• Cas où les n racines du dénominateur de Y(s) sont toutes distinctes
Rappels : décomposition en éléments simples
Y(s ) =bi s
i
i=0
m∑
ai si
i=0
n∑
avec n >m
Y(s ) =bi s
i
i=0
m∑
(s − s1 )(s − s2 )...(s − sn )=
A1s − s1
+A2s − s2
+!+Ans − sn
Ai = lims→sis − si( )Y(s )⎡
⎣⎤⎦ i =1,2,!,n

Automatique H. Garnier 56
• Déterminer le signal y(t) ayant comme transformée de Laplace
Transformée de Laplace inverse Exemple
Y(s ) = s +2s s +1( ) s +3( )
y(t ) = 23−12e−t − 1
6e−3t
⎛
⎝⎜
⎞
⎠⎟Γ( t )

Automatique H. Garnier 57
• 2ème cas : Si Y(s) possède une racine multiple s1 de multiplicité r :
– Formule compliquée ! On évite de l’utiliser
– Méthode recommandée pour les cas « simples » : • On détermine Ar par la méthode des limites • On choisit des valeurs de s≠s1 (par exemple s=0, s=-1 etc) • on résout un système d’équations pour les coefficients A1,…, Ar-1
Rappels : décomposition en éléments simples
Y(s ) =bi s
i
i=0
m∑
s − s1( )r=
A1s − s1
+A2
s − s1( )2+!+
Ars − s1( )r
Ai = lims→s1
1r − i( )!
dr−i
dsr−is − s1( )r Y(s )
⎧⎨⎩
⎫⎬⎭
⎡
⎣⎢⎢
⎤
⎦⎥⎥
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟
i =1,2,!,r

Automatique H. Garnier 58
• Déterminer le signal y(t) ayant comme transformée de Laplace
Transformée de Laplace inverse Exemple
Y(s ) = s +2
s +1( )2 s +3( )
Y(s ) = 141s +1
+12
1
s +1( )2−14
1s +3
y(t ) = 14e−t + 1
2te−t − 1
4e−3t
⎛
⎝⎜
⎞
⎠⎟Γ( t )
Y(s ) = s +2
s +1( )2 s +3( )=A1s +1
+A2s +1( )2
+A3s +3
A2 = lims→−1
s +1( )2 Y(s )⎡
⎣⎢⎤
⎦⎥=12
A3 = lims→−3
s +3( )Y(s )⎡⎣
⎤⎦= −
14
s = 0;Y(0 ) = 23= A1 + A2 +
A33
A1 =14

Automatique H. Garnier 59
On calcule le discriminant Δ
• Si Δ>0 ; les deux racines sont réelles distinctes
• Si Δ=0 ; la racine est double réelle. 2 cas sont à distinguer :
• Si Δ<0 ; les deux racines sont complexes conjuguées. 2 cas sont à distinguer :
Cas particuliers de transformées de Laplace du 2e ordre
Y(s) = N(s )as2 +bs + c
Y(s) = Ka(s − s1 )(s − s2 )
=A1s − s1
+A2s − s2
Y(s) = Ka(s − s1 )
2=
A(s − s1 )
2
y(t)= A1es1t + A2e
s2t( )Γ( t )
y(t)=Ates1tΓ( t )
Y(s ) = K
as2 +bs + c= A
ωo
s +α( )2 +ωo2 y(t)=Ae−αt sin ωot( )Γ( t )
Y(s ) = ds +e
as2 +bs + c= A s +α
s +α( )2 +ωo2 y(t)=Ae−αt cos ωot( )Γ( t )
Y(s ) = ds +ea(s − s1 )
2=
A1s − s1
+A2
(s − s1 )2 y(t)= A1e
s1t + A2tes1t( )Γ( t )
Automatique H. Garnier 60
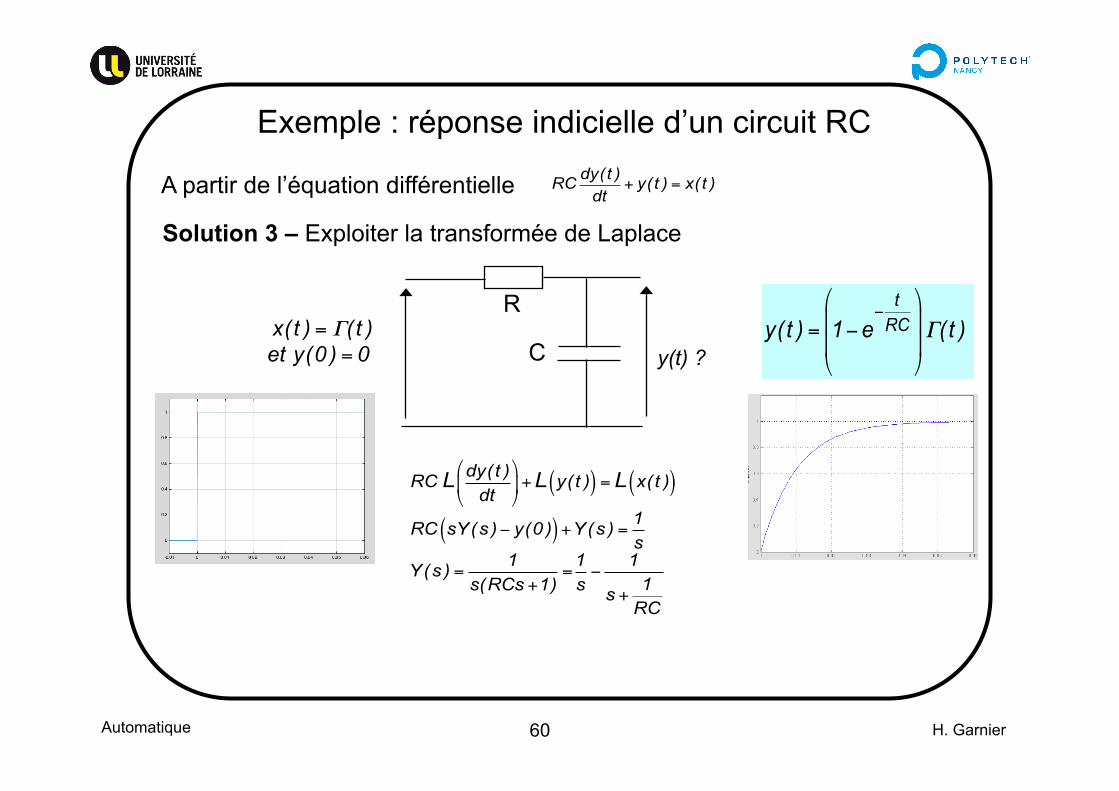
R
C y(t) ? x(t ) = Γ( t )et y(0 ) = 0
y(t ) = 1−e−tRC
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟Γ( t )
Exemple : réponse indicielle d’un circuit RC
A partir de l’équation différentielle
Solution 3 – Exploiter la transformée de Laplace
RC dy(t )dt
+ y(t ) = x(t )
RC L dy(t )dt
⎛
⎝⎜
⎞
⎠⎟+L y(t )( ) = L x(t )( )
RC sY(s )− y(0 )( )+Y(s ) = 1sY(s ) = 1
s(RCs +1)=1s−
1
s + 1RC

Automatique H. Garnier 61
Réponse temporelle d’un système – Bilan
– Solution 1 – A partir de son équation différentielle, il faut résoudre l’équation. Calculs souvent compliqués !
– Solution 2 – Connaissant sa réponse impulsionnelle, on peut calculer la réponse via le produit de convolution. Calculs également compliqués !
– Solution 3 – A partir de son équation différentielle, on peut exploiter la transformée de Laplace. Calculs plus simples
entrée réponse ? Modèle
RC dy(t )dt
+ y(t ) = x(t ) y(t ) = 1−e−tRC
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟Γ( t )
y(t ) = g(t)*x(t)= g(t − τ ) x(τ )dτ-∞
+∞
∫g(t ) = 1RC
e−tRCΓ( t ) y(t ) = 1−e
−tRC
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟Γ( t )
y(t ) = 1−e−tRC
⎛
⎝
⎜⎜
⎞
⎠
⎟⎟Γ( t )RC dy(t )
dt+ y(t ) = x(t ) Y(s ) =1
s−
1
s + 1RC

Automatique H. Garnier 62
• Définition : c’est le rapport de la transformée de Laplace de la sortie du système Y(s) sur la transformée de Laplace de l’entrée X(s) lorsque les conditions initiales sont nulles
• Remarque importante :
En Automatique continue, on représente un système par sa fonction de transfert G(s)
Fonction de transfert
G(s) = Y(s )X(s )
Lorsque les conditions initiales des signaux d’entrée/sortie sont nulles
Visionner la vidéo de Brian Douglas : Control Systems Lectures-Transfer functions

Automatique H. Garnier 63
• Rappel 1 : la sortie y(t) d’un système s’écrit dans le domaine temporel comme le produit de convolution entre la réponse impulsionnelle g(t) et l’entrée x(t)
• En appliquant la transformée de Laplace
La fonction de transfert d’un système est la transformée de Laplace de la réponse impulsionnelle
Réponse impulsionnelle & fonction de transfert
Y(s )X(s )
=G(s) =L(g(t)) lorsque les CI nulles
L(y(t)) =L(g(t)*x(t)) ⇔ Y(s )=G(s)× X(s)
y(t ) = g(t)*x(t)= g(t − τ ) x(τ )dτ-∞
+∞
∫
Automatique H. Garnier 64
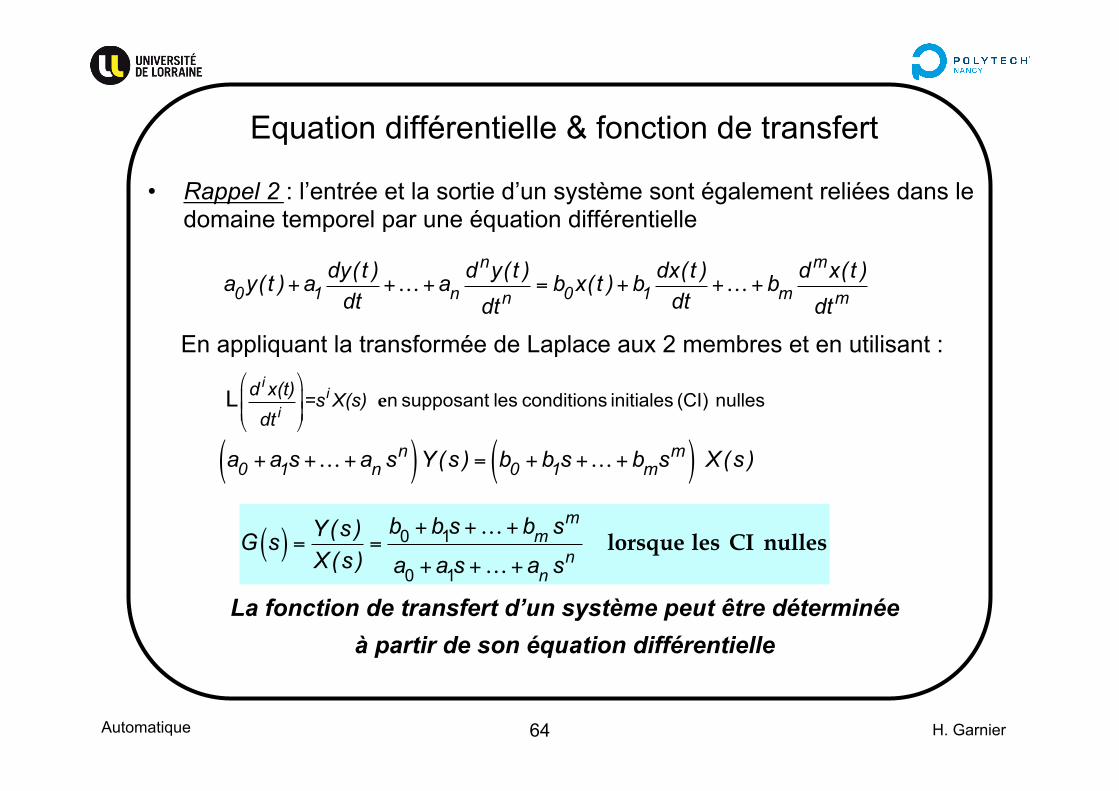
• Rappel 2 : l’entrée et la sortie d’un système sont également reliées dans le domaine temporel par une équation différentielle
En appliquant la transformée de Laplace aux 2 membres et en utilisant :
La fonction de transfert d’un système peut être déterminée à partir de son équation différentielle
L di x(t)
dt i
⎛
⎝⎜⎜
⎞
⎠⎟⎟=si X(s) en supposant les conditions initiales (CI) nulles
Equation différentielle & fonction de transfert
a0y(t )+a1dy(t )dt
+…+andny(t )
dtn= b0x(t )+b1
dx(t )dt
+…+bmdmx(t )
dtm
a0 +a1s +…+an sn( )Y(s ) = b0 +b1s +…+bms
m( ) X(s )
G s( ) = Y(s )X(s )=b0 +b1s +…+bm s
m
a0 +a1s +…+an sn
lorsque les CI nulles

Automatique H. Garnier 65
• Ce concept de fonction de transfert ne s’applique qu’aux systèmes linéaires invariants dans le temps (LTI)
• G(s) ne dépend que du système. Elle ne dépend ni de l’entrée, ni des conditions initiales des signaux d’E/S
• La fonction de transfert d’un système s’écrit • souvent comme une fonction rationnelle : rapport de 2 polynômes
• mais pas toujours ! • Ex : système linéaire invariant dans le temps avec retard pur
Fonction de transfert - Propriétés
G s( ) = b0 +b1s +…+bm sm
a0 +a1s +…+an sn=N(s )D(s )
!y(t)=x(t-τ ) ⇔ G(s)= e−τs
s

Automatique H. Garnier 66
Ordre d’un système
• Soit un système linéaire décrit par la fonction de transfert :
• Définition
– L’ordre n d’un système est le degré le plus élevé du polynôme du dénominateur de G(s), le cas échéant après élimination des facteurs communs au numérateur et au dénominateur
– Exemples
G(s) = s
s2 +ωo2; n = 2 G(s) = s
s2 + 2s=
1s + 2
; n =1
G s( ) = N(s )D(s )=bm s
m +…+b1s +b0sn +…+a1s +a0

Automatique H. Garnier 67
Gain statique d’un système
• Soit un système linéaire décrit par la fonction de transfert :
• Définition
– Le gain statique d’un système est la valeur de G(s) pour s=0
• Pour un système stable, on a aussi
– Il est parfois utile de définir d’autres gains :
• Gain en vitesse
• Gain en accélération
Exemple
G(s) = 2s +1
K = 2Kv = 0Ka = 0
K = lims→0
G(s)
K =limt→+∞
y(t )
limt→+∞
x(t )
Kv = lims→0sG(s )
Ka = lims→0s2G(s)
G s( ) = N(s )D(s )=bm s
m +…+b1s +b0sn +…+a1s +a0

Automatique H. Garnier 68
G s( ) = N(s )D(s )=bm s
m +…+b1s +b0sn +…+a1s +a0
=C
s − zj( )j=1
m
∏
s − pi( )i=1
n
∏
Pôles et zéros d’une fonction de transfert • Soit une fonction de transfert H(s)
• Définitions
– zéros zj : racines du numérateur N(s)=0
– pôles pi : racines du dénominateur D(s)=0
– On trace souvent le diagramme des pôles/zéros – Ils peuvent être réels ou complexes – S’ils sont complexes, ils apparaissent
en paires conjuguées – Exemple G(s) = s
s2 +ωo2=
s
s + jωo( ) s − jωo( )
Re(s)
Im(s)
0
jωo
-jωo
Diagramme des pôles/zéros

Automatique H. Garnier 69
Fonction de transfert d’un circuit RC
R
C x(t) y(t)
G(s) = Y(s )X(s )
=1
1+RCs
RC L dy(t )dt
⎛
⎝⎜
⎞
⎠⎟+L y(t )( ) = L x(t )( )
RC sY(s )− y(0 )( )+Y(s ) = X(s )(RCs +1)Y(s ) = X(s ) y(0 ) = 0
RC dy(t )dt
+ y(t ) = x(t )
G(s) ?
Domaine temporel Domaine de Laplace
n =1; K =1; p1 = −1RC

Automatique H. Garnier 70
Fonction de transfert d’un bras de robot rigide
G(s) = Θ(s )U(s )
=1
ml ls2 + g( )
G(s) ?
Domaine temporel Domaine de Laplace
ml2 L d2θ( t )dt2
⎛
⎝⎜⎜
⎞
⎠⎟⎟+mglL θ( t )( ) =L u(t )( )
ml2 s2Θ(s )( )+mglθ(s ) =U(s )ml2s2 +mgl( )Θ(s )=U(s )G(s ) = Θ(s )
U(s )=
1ml2s2 +mgl
ml2 d2θ( t )dt2
+mgl θ( t ) = u(t )
n = 2; K =1mgl
; p1,2 = ± jgl

Automatique H. Garnier 71
En Automatique, on représente un système par un schéma-bloc qui relie la transformée de Laplace de l’entrée X(s) à la transformée de Laplace de la sortie Y(s) via sa fonction de transfert G(s) Du schéma-bloc, on peut en déduire les relations
Schéma-bloc ou schéma fonctionnel
Y(s ) =G(s)X(s )ou
G(s ) = Y(s )X(s )
X(s) Y(s) G(s)

Automatique H. Garnier 72
Modèle et représentation d’un bras de robot rigide en Automatique
G(s) = Θ(s )U(s )
=1
ml ls2 + g( )
Représentation en Physique Représentation en Automatique
ml2 d2θ( t )dt2
+mgl θ( t ) = u(t )
U(s) Θ(s) G(s)

Automatique H. Garnier 73
Algèbre des schéma-blocs • Les systèmes automatiques sont souvent constitués de plusieurs fonctions
de transfert interconnectées par des comparateurs ou sommateurs, des points de dérivation, des rétro-actions, …
• Pour déterminer G(s), la fonction de transfert équivalente, on peut : – soit définir toutes les variables intermédiaires, écrire les équations liant
ces variables, puis éliminer par calcul les variables intermédiaires pour calculer le rapport de la TL de la sortie et de la TL de l’entrée
– soit simplifier pas à pas le schéma-bloc en utilisant les règles de l’algèbre des schémas-blocs
U(s) G(s) ?
Z(s)

Automatique H. Garnier 74
Algèbre des schéma-blocs
• Structure en série
• Structure en parallèle
G1(s) G2(s) X(s) Y(s) X(s) Y(s)
G1(s)G2(s)
X(s) Y(s) G1(s)+G2(s)
+
+
G2(s)
X(s)
G1(s) Y(s)

Automatique H. Garnier 75
Simplification de schéma-blocs - Exemple
• Déterminer la fonction de transfert entre U(s) et Z(s)
U(s) G(s) ?
Z(s)
G(s) = s3 +12s2 +35s +19s3 +9s2 + 26s + 24

Automatique H. Garnier 76
Déplacement des blocs sur les points de prélèvement
Algèbre des schéma-blocs
Automatique H. Garnier 77
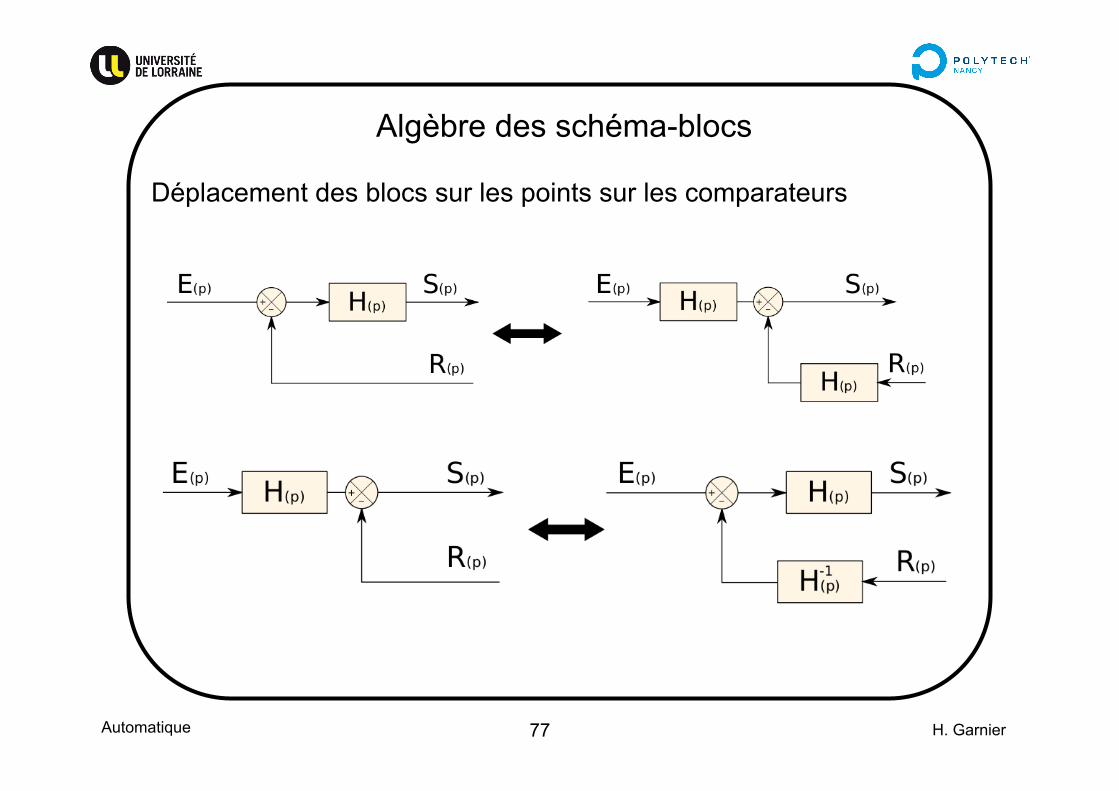
Déplacement des blocs sur les points sur les comparateurs
Algèbre des schéma-blocs

Automatique H. Garnier 78
• Structure bouclée simple à retour négatif
+
- G(s)
U(s)
H(s)
X(s) Y(s)
Algèbre des schéma-blocs (suite)
G(s)1+G(s)H(s )
X (s) Y(s)

Automatique H. Garnier 79
• Structure bouclée simple à retour positif
G(s)1−G(s)H(s )
X (s) Y(s)
+
+ G(s)
U(s)
H(s)
X(s) Y(s)
Algèbre des schéma-blocs (suite)

Automatique H. Garnier 80
Y(s ) =T(s )R(s )+S(s )D(s )
T(s ) = C(s )G(s )1+C(s )G(s )H(s )
S(s ) = 11+C(s )G(s )H(s )
Algèbre des schéma-blocs (suite) • Structure bouclée à entrées multiples (consigne+perturbation)
– Pour calculer la relation entrées/sortie, on utilise la propriété d’additivité : • pour chaque entrée, on calcule la sortie en supposant les autres
entrées nulles et additionne les sorties pour obtenir la sortie totale
+
- C(s) G(s)
Y(s) R(s)
D(s)
+ +
H(s)
+
+
T(s)
D(s) S(s) Y(s)
R(s)





























