Embed Size (px)
Citation preview

Avaliação da qualidade dos majorantes do erro das
soluções de elementos finitos
Vitor Amaral Melo
Dissertação para obtenção do Grau de Mestre em Engenharia Civil
Júri Presidente: Pedro Guilherme Sampaio Viola Parreira Orientador: José Paulo Baptista Moitinho de Almeida Vogal: Eduardo Manuel Baptista Ribeiro Pereira
Junho de 2010


iii
Resumo
Neste trabalho são apresentados modelos de elementos finitos para a análise de estados planos
de tensão em regime elástico linear, para peças compostas por diferentes materiais e estuda-se, a
posteriori, o majorante do erro em energia. A diferença entre os materiais é introduzida pela alteração
no módulo de elasticidade do segundo material.
São aplicadas formulações complementares designadas de Primal e Dual, que permitem,
respectivamente, obter soluções compatíveis e equilibradas.
Para executar tal tarefa foram utilizados, com algumas alterações, os programas desenvolvidos
pelo Professor José Paulo Baptista Moitinho de Almeida para estados planos de tensão, com especial
incidência para os que possuem a mesma designação das formulações enunciadas: Primal e Dual.
O desempenho dos programas, dentro das suas limitações, e a qualidade das soluções obtidas,
de acordo com as opções de modelação, são o principal objectivo deste documento.
A aferição da qualidade faz-se com recurso à análise dual que, a partir de uma solução
compatível e de uma equilibrada, permite estabelecer limites para a energia potencial da solução
exacta, confirmando-se a convergência das soluções para um aumento do número de elementos dos
sistemas.
São abordadas diferentes condições de fronteira e a forma de as impor no sistema, diferentes
graus para as funções de aproximação e diferentes números de elementos, com vista a caracterizar o
comportamento das soluções com a evolução destas variáveis.


v
Abstract
The dissertation presents finite element models for the linear elastic analysis of plane stress
problems in domains composed by different materials and the upper bound of their error in energy is
evaluated a posteriori. The difference between the materials will be introduced by changing the
elasticity modulus of the second material.
Complementary formulations designated Primal and Dual are applied, providing respectively,
solutions with compatible displacements and equilibrated stresses.
To accomplish this task the programs developed by Dr. Jose Paulo Baptista Moitinho de Almeida
for plane stress condition were used, with some amendments, focusing on those that have the same
designation of the formulations listed: Primal and Dual.
The evaluation of the performance of these programs, within their limitations, and of the quality of
solutions, in accordance with the modeling options, is the main objective of this document.
The assessment of the quality of the solution makes use of dual analysis which, from compatible
and equilibrated solutions, allows us to establish bounds on the potential energy of the exact solution,
confirming the convergence of the solutions by increasing the number of elements of the systems.
Different boundary conditions, how to enforce them on the system, different degrees of the
approximation functions and different numbers of elements are addressed, in order to characterize the
behavior of the solutions with the evolution of these variables.


vii
Palavras-chave
Elasticidade linear
Estados planos de tensão
Formulação de deslocamentos
Formulação híbrida de tensão
Análise dual
Majorante do erro
Keywords
Linear elasticity
Plane stress states
Displacement formulation
Hybrid stress formulation
Dual analysis
Upper bound of error


ix
Agradecimentos


xi
Notação
A Operador diferencial de compatibilidade; TA Operador diferencial de equilíbrio;
eib Vector de forças fictícias resultantes da partição da unidade;
B Matriz das deformações existente no elemento para deslocamentos, impostos,
unitários;
D Operador elástico ou a matriz das relações constitutivas;
( ),( )j iD Matriz de equilíbrio associada ao lado j do elemento i;
e Vector das componentes independentes do tensor das deformações;
ce Vector do erro do campo de deslocamentos duma solução compatível;
ee Vector do erro do campo de deslocamentos duma solução equilibrada;
e Vector do erro do campo de tensões;
0,( )ie Vector das deformações generalizadas do elemento i devidas a 0,( )iσ ;
E Módulo de elasticidade, ou de Young, do material;
if Componente do vector de forças de domínio;
f Vector de forças de domínio ou de massa;
( )if Vector de forças de domínio ou de massa do elemento i;
f Matriz de flexibilidade infinitesimal;
( )iF Matriz de flexibilidade do elemento i;
extF Vector das forças exteriores;
fF Vector de forças equivalentes às forças de domínio;
intF Vector das forças interiores;
nF Vector das forças concentradas aplicadas nos nós do elemento;
tF Vector de forças equivalentes às tensões aplicadas na fronteira;
eK Matriz de rigidez de um elemento;
GK Matriz de rigidez global do sistema;
in Componente do versor da normal a uma superfície;
N Número total de elementos da malha;
N Matriz da normal exterior à fronteira;
( ),( )j iN Matriz da normal exterior à fronteira j do elemento i;
q Deslocamentos nodais da malha de elementos finitos;
p Grau das funções de aproximação nos elementos;
Q Forças nodais equivalentes geradas em cada elemento;

xii
extQ Forças nodais, exteriores, equivalentes geradas em cada elemento;
intQ Forças nodais, interiores, equivalentes geradas em cada elemento;
s Vector das componentes independentes do tensor das tensões;
( )is Vector dos parâmetros associados as funções ( )iS
( )iS Matriz das funções de aproximação das tensões no elemento finito i;
(v)St Estrela que agrupa todos os elementos que partilham o nó v;
(v)Lk Contorno da estrela que agrupa todos os elementos que partilham o nó v;
( ),( )j it Vector da tensão aplicada no lado j do elemento i;
it Componente do vector da tensão aplicada;
Vector da tensão aplicada;
( )jt Vector da tensão generalizada aplicada no lado j;
0,( ),( )j it Vector da tensão generalizada aplicada no lado j devida a 0,( )iσ ;
iu Componente do vector de deslocamentos;
u Campo de deslocamentos solução exacta;
cu Vector dos deslocamentos duma solução compatível;
eu Vector dos deslocamentos duma solução equilibrada;
nu Vector do campo de deslocamentos nodais dos elementos;
( )iu Vector do campo de deslocamentos no elemento i;
iu Componente do vector de deslocamentos impostos;
u Campo de deslocamento imposto;
U Energia de deformação;
( )jV Matriz das funções de aproximação dos deslocamentos no lado j;
( )jv Vector dos deslocamentos impostos no lado j;
( )jv Vector dos parâmetros de deslocamentos no lado j;
( ),( )i jv Vector dos deslocamentos generalizados impostos no lado j;
eW Trabalho das forças exteriores;
iW Trabalho das forças interiores;
ij Componente de distorção;
Fronteira da peça;
j Fronteira genérica entre elementos/ fronteira mista;
t Fronteira estática da peça;
u Fronteira cinemática da peça;
t

xiii
ij Componente do tensor das deformações;
ε Vector das deformações;
Majorante da norma energética do erro
energ Majorante do erro em energia de deformação
Coeficiente de Poisson;
* Energia potencial complementar;
Energia potencial;
σ Vector das tensões;
eσ Vector das tensões duma solução equilibrada;
,( )e iσ Campo de tensões equilibrado em cada elemento i;
ijσ Componente do tensor das tensões;
0,( )iσ Solução particular de tensões que equilibra as cargas aplicadas no elemento i;
( )iσ Vector das tensões no elemento i;
ψ Matriz das funções de aproximação dos deslocamentos
i Função de aproximação utilizada no vértice do elemento
( )ei xΨ Funções da partição da unidade para o elemento e do vértice i;
Domínio;
I Matriz de incidências de um elemento
E Norma energética;
E,( )i Norma energética do elemento i.


xv
Índice
1 Introdução ................................................................................................................................ 1
1.1 Enquadramento ............................................................................................................... 1
1.2 Objectivos ........................................................................................................................ 2
1.3 Organização .................................................................................................................... 2
2 Definição do problema ............................................................................................................. 3
2.1 Condições no domínio ..................................................................................................... 3
2.2 Condições de fronteira .................................................................................................... 5
3 Elemento Finitos ...................................................................................................................... 9
3.1 Formulação Primal........................................................................................................... 9
3.1.1 Primeira fase: Aproximações ..................................................................................... 10
3.1.2 Segunda fase: Forças Nodais Equivalentes ............................................................. 10
3.1.3 Terceira fase: Equação Resolvente .......................................................................... 11
3.1.4 Quarta fase: Análise da Solução ............................................................................... 12
3.1.5 Funções de aproximação .......................................................................................... 12
3.2 Formulação Dual ........................................................................................................... 13
3.2.1 Formulação híbrida de equilíbrio global .................................................................... 13
3.2.2 Formulação de equilíbrio adoptada ........................................................................... 16
4 Erros e avaliação das soluções ............................................................................................. 21
4.1 Medidas de erro ............................................................................................................. 21
4.2 Limite de energia de deformação .................................................................................. 23
4.3 Extrapolação Dual ......................................................................................................... 25
5 Exemplificação do processo de solução ............................................................................... 27
6 Apreciação gráfica das soluções ........................................................................................... 35
6.1 Caso de estudo .............................................................................................................. 35
6.2 Casos auxiliares ............................................................................................................ 43
7 Avaliação dos resultados numéricos ..................................................................................... 45
7.1 Comparação com casos de carga auxiliares ................................................................ 45
7.2 Resultados do caso de estudo ...................................................................................... 47
7.2.1 Relação da qualidade da solução com o custo computacional ................................ 48

xvi
7.2.2 Oscilação das principais fontes de erro com o aumento do módulo de elasticidade
do material mais rígido ................................................................................................................... 50
7.2.3 Apreciação dos gráficos ............................................................................................ 53
8 Conclusões e desenvolvimentos futuros ............................................................................... 59
Bibliografia ..................................................................................................................................... 61
Anexos........................................................................................................................................... 63
Anexo I - 2hs.geo ....................................................................................................................... 65
Anexo II – 2hs4e.msh ................................................................................................................ 67

xvii
Índice de Figuras
Figura 2-1 Definição do domínio e fronteiras (a), convenção de sinais das tensões (b), forças de
fronteira, forças de massa e deslocamentos (c) ..................................................................................... 4
Figura 2-2 Campo de deformações ................................................................................................ 5
Figura 3-1 Polinómios de Lagrange .............................................................................................. 12
Figura 3-2 Funções associadas aos lados dos elementos ........................................................... 12
Figura 3-3 Função do 3º e 4º grau associada ao elemento .......................................................... 13
Figura 3-4 Exemplo da correcção do sinal de uma função lateral ímpar ..................................... 13
Figura 3-5 Estrela de um vértice, totalidade da estrela e seu contorno ....................................... 17
Figura 3-6 Sistema com solução conhecida (a) e sua discretização (b). ..................................... 17
Figura 3-7 Estrela do vértice B ( ( )St B a) e o seu contorno ( ( )Lk B b) ...................................... 17
Figura 3-8 Estrelas A,B,C,D e E e suas forças fictícias. ............................................................... 19
Figura 3-9 Imposição das condições de fronteira ......................................................................... 20
Figura 5-1 Caso de estudo ............................................................................................................ 27
Figura 5-2 Geometria do caso de estudo ...................................................................................... 28
Figura 5-3 Exemplo de uma malha aplicada ao caso de estudo .................................................. 28
Figura 5-4 malhas do caso de estudo ........................................................................................... 29
Figura 6-1 Cubo de soluções gráficas .......................................................................................... 35
Figura 6-2 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=2 e
Ne=4 ...................................................................................................................................................... 37
Figura 6-3 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=2 e
NE=16 .................................................................................................................................................... 37
Figura 6-4 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=2 e
NE=256 .................................................................................................................................................. 38
Figura 6-5 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=2 e
NE=1024 ................................................................................................................................................ 38
Figura 6-6 Representação da deformada nos cantos superiores e inferiores da aresta encastrada
............................................................................................................................................................... 39
Figura 6-7 Representação das tensões para as formulações Primal e Dual, para GA=5/6,
NE=256 e E2=1 ..................................................................................................................................... 40
Figura 6-8 Representação das tensões para as formulações Primal e Dual, para GA=5/6,
NE=256 e E2=2 ..................................................................................................................................... 41
Figura 6-9 Representação das tensões para as formulações Primal e Dual, para GA=5/6,
NE=256 e E2=10 ................................................................................................................................... 42
Figura 6-10 Representação das tensões para as formulações Primal e Dual, para GA=5/6,
NE=256 e E2=40 ................................................................................................................................... 43
Figura 6-11 Casos de carga auxiliares ......................................................................................... 43
Figura 7-1 Diferenças de intensidade e localização do erro para as abordagens d0, d1 e d2 .... 51


xix
Índice de Quadros
Quadro 2-1 Equações básicas ........................................................................................................ 3
Quadro 5-1Ilustação das diferenças para aplicação das condições de fronteira em função da
malha. .................................................................................................................................................... 32
Quadro 5-2 Componentes da matriz de ........................................................................................ 33
Quadro 5-3 Lista de ficheiros *.mat ............................................................................................... 33
Quadro 6-1 Diferenças dirichlet 0, 1 e 2, em caso com fronteiras cinemáticas ............................ 36
Quadro 6-2 Diferenças dirichlet 0, 1 e 2, nos casos de load3 ...................................................... 44
Quadro 7-1 Combinações de casos de estudo ............................................................................. 45
Quadro 7-2 Resumo dos quocientes para uma determinada célula do quadro de combinações 47
Quadro 7-3 Distribuição média da melhoria da solução relativa ao caso de 4 elementos ........... 48
Quadro 7-4 Distribuição média dos tempos relativos ao caso de 4 elementos ............................ 49
Quadro 7-5 Quocientes d0/d1 e d0/d2 para load1 ........................................................................ 52
Quadro 7-6 Confronto das soluções Primal e Dual ...................................................................... 55
Quadro 7-7 Confronto das soluções Primal e Dual ...................................................................... 57
Índice de Gráficos
Gráfico 7-1 Relação entre a qualidade da solução avaliada pelo número de elementos e o tempo
gasto na sua computação ..................................................................................................................... 49
Gráfico 7-2 Variação da diferença de energia potencial entre a solução Primal e a solução Dual,
com o aumento do número de elementos, em casos com fronteiras cinemáticas para uma
determinada razão dos módulos de elasticidade .................................................................................. 53
Gráfico 7-3 Variação da diferença de energia de deformação entre a solução Primal e a solução
Dual, com o aumento do grau das funções de aproximação dos deslocamentos/tensões, em casos
com fronteiras cinemáticas para uma determinada razão dos módulos de elasticidade ..................... 54
Gráfico 7-4 Energias potenciais Primal, Dual e Extrapolada ........................................................ 56
Gráfico 7-5 Variação da média do entre o erro da solução Primal e da solução Dual, com o
aumento do número de elementos ........................................................................................................ 58


1
1 Introdução
1.1 Enquadramento
Para o dimensionamento de estruturas, nas diversas dimensões possíveis, em geral utilizam-se
métodos que permitem estabelecer soluções aproximadas para os problemas em questão, com
especial relevância para problemas de índole bidimensional e tridimensional, uma vez que se para
uma grande parte dos problemas unidimensionais é possível obter uma solução analítica exacta, o
mesmo não se aplica a problemas com duas ou três dimensões. O presente documento reporta a
casos bidimensionais, recorrendo a métodos computacionais desenvolvidos para o efeito.
O método usual nestes casos, é o Método dos Elementos Finitos, (MEF), aplicado a casos de
estados planos de tensão, (EPT), nas diferentes formulações estabelecidas, fornecendo soluções,
que embora possam ser apenas aproximadas, são melhores que não ter solução. Este método faz
uso de modelos que tentam reproduzir a realidade o mais fielmente possível, sendo certo que
existirão sempre diferenças, como por exemplo no modelo de comportamento, sendo o mais simples
e mais utilizado o modelo elástico linear, que nem sempre se adapta nas melhores condições ao caso
real, como por exemplo no caso de peças próximas da rotura. Neste documento, recorrer-se-á a
modelos elásticos lineares em cada material, mas com descontinuidades entre materiais, simulando o
recurso a materiais compósitos. Apesar desta fonte de erro no modelo, a análise elástica linear é
correntemente utilizada em engenharia civil, pois permite, geralmente, obter resultados aceitáveis
para o dimensionamento e a verificação da segurança.
De facto, o recurso ao MEF deve ser feito com cuidado, pois podem resultar soluções
completamente inúteis, associadas a más discretizações do objecto a modelar e a erros elevados
causados por modelações grosseiras, sem flexibilidade para adaptação ao comportamento exigido do
objecto de estudo.
Este erro pode ser medido de diferentes formas. Sendo o método dos elementos finitos baseado
na obtenção de uma aproximação global da energia, a forma mais lógica de o medir é através da
norma energética global ou do próprio erro em energia, procurando-se obter estimativas da energia
potencial do sistema.
Torna-se imperativo a definição de margens de erros aceitáveis, que devem ser definidas caso a
caso de acordo com a exigência necessária. A ideia de se definir esta margem a priori, é muito
apreciável, pois poderia definir-se a exigência a impor no modelo computacional, optimizando a sua
utilização na óptica da relação custo benefício, confrontando-se o tempo e exigência técnica dos
sistemas com a qualidade da solução obtida. De facto não há forma de garantir antecipadamente o
erro máximo tolerado, pelo que o recurso a este método torna-se iterativo, em que gradualmente se
deve ir aumentando a exigência da qualidade das malhas utilizadas na discretização dos objectos,
avaliando-se o erro obtido a posteriori e procedendo a refinamentos da malha com vista a
minorarmos o erro obtido.
Na óptica de optimizar o modelo computacional o mais lógico seria procedermos a um
refinamento adaptativo, alterando as malhas apenas nos locais em que o erro elementar não

2
satisfizesse as tolerâncias estabelecidas, mas por simplicidade e limitação dos programas utilizados
será realizado um refinamento uniforme, que embora possa ter um custo mais elevado, não será
demasiado devido à simplicidade do caso estudado, que apesar disso serve bem os objectivos do
estudo realizado.
1.2 Objectivos
O objectivo desta dissertação é estudar a utilização de elementos finitos compatíveis e de
equilíbrio na estimação de erro a posteriori em problemas estáticos de elasticidade linear, compostos
por materiais diferentes.
Neste contexto procedeu-se a algumas alterações dos programas desenvolvidos pelo Professor
José Paulo Baptista Moitinho de Almeida, que contemplam formulações de elementos compatíveis e
equilibrados, com especial ênfase na introdução de materiais distintos constituintes da mesma peça.
Pretende-se avaliar o majorante do erro em energia, por alteração das diferentes variáveis do
problema proposto, nomeadamente o número de elementos, os tipos de condições de fronteira e
forma de as impor, o grau das funções de aproximação e a razão entre os módulos de elasticidade
dos materiais utilizados.
1.3 Organização
No segundo capitulo, caracteriza-se o estado plano de tensão e enuncia-se as equações
governativas dos estados planos de deformação, caracterizando as variáveis envolvidas e as
relações entre elas.
No capítulo 3, introduz-se a temática dos elementos finitos e os aspectos base das principais
formulações, desenvolvendo-se a formulação compatível no modelo tradicional, e a formulação
equilibrada global, particularizando-se esta para uma formulação local, aplicável em estrelas, que tem
por base uma solução compatível, onde se tenta impor o equilíbrio de uma forma local, mas sem
perder muito a compatibilidade previamente estabelecida.
O capítulo 4, dedica-se à introdução da temática associada ao erro das soluções,
estabelecendo-se medidas de aferição deste com base em medições de energia potencial.
No quinto capítulo, descrevem-se os dados necessários, e a sua estrutura, para a utilização
destes com a aplicação MATLAB, mais propriamente com os programas Primal e Dual.
O capítulo 6, é aquele onde se mostram e interpretam os resultados gráficos obtidos para o caso
de estudo, e se comparam com casos auxiliares com o objectivo de encontrar padrões explicativos
dos resultados.
No capítulo 7, procede-se de forma idêntica ao capítulo anterior, mas desta vez com maior foco
sobre o caso de estudo e com uma perspectiva mais numérica sobre as soluções.
No capítulo 8, realizam-se alguns comentários finais e são sugeridos alguns desenvolvimentos
futuros deste trabalho.

3
2 Definição do problema
O problema sobre o qual se desenvolverá o presente texto será a avaliação da qualidade dos
majorantes de erros das soluções de elementos finitos, mais especificamente na qualidade das
soluções obtidas a partir do programa desenvolvido pelo Professor José Paulo Baptista Moitinho de
Almeida, contendo as formulações Primal e Dual para problemas de elasticidade linear em Estados
Planos de Tensão (EPT), com especial ênfase em domínios constituídos por dois ou mais materiais.
Neste contexto, serão admitidas as hipóteses de que cada material é homogéneo, isótropo e
elástico linear (linearidade física) e que os deslocamentos e as deformações são infinitesimais
(linearidade geométrica). Admite-se, também, o comportamento quase-estático, ou seja,
desprezam-se as forças de inércia e de amortecimento que se possam desenvolver durante o
carregamento da estrutura. Para além disso, admite-se que, nos encontramos perante um problema
de EPT em placas, situadas no plano x,y, onde, por admissão das hipóteses de que estamos diante
de uma peça laminar plana solicitada no próprio plano, com espessura suficientemente pequena em
relação às restantes dimensões características, podendo ser desprezada, a análise se reduz a
considerar que 0 e que , e xx yy xy não variam com z .
Os problemas de EPT são caracterizados por um conjunto de equações, que se encontram
resumidas, na forma matricial, no Quadro 2-1, tal como apresentadas em (Freitas, 2009), sendo que,
a análise destas condições se subdivide em duas regiões distintas de uma mesma peça, no seu
domínio e na sua fronteira, representadas na Figura 2-1 a)
Equilíbrio Elasticidade Compatibilidade
Domínio Domínio Domínio
em A s f 0T
(2.1) ems De
(2.2) eme Au
(2.3)
Fronteira Fronteira
em tN s tT
(2.4)
em uu u (2.5)
Quadro 2-1 Equações básicas
As equações presentes no quadro Quadro 2-1 serão, em seguida, escritas explicitamente,
apresentando-se o significado das suas variáveis e das condições físicas que impõem.
2.1 Condições no domínio
A condição de equilíbrio no domínio (2.1) assegura que, a variação do campo de tensões, em
cada ponto, equilibra as forças de massa. Nesta equação, as matrizes TA , s e f possuem o
seguinte significado:

4
A ( AT ) representa o operador diferencial de compatibilidade (equilíbrio), que nos EPT toma a
seguinte forma:
T
00
00 ,
com a representar
xx y
yy x
y x
i i
A A (2.6)
s é um vector que agrupa as componentes independentes do tensor das tensões para cada
ponto, apresentadas na Figura 2-1 b):
( , )
( , ) ,
( , )
xx
yy
xy
x y
x y
x y
s (2.7)
f é o vector das forças de domínio, que representa as forças distribuídas no domínio ,
podendo estas ser distribuídas na área, linha ou aplicadas num ponto, ilustradas na Figura
2-1 c):
.x
y
f
f
f (2.8)
A forma explícita da equação (2.1) é:
0
.0
em xx xy x
yy xy y
x y f
y x f
(2.9)
Figura 2-1 Definição do domínio e fronteiras (a), convenção de sinais das tensões (b), forças de fronteira, forças de massa e deslocamentos (c)
A condição de compatibilidade no domínio (2.3) define, em cada ponto, as medidas de
deformação em função de variação do campo de deslocamentos, sendo a matriz A a já referida em
(2.6), e e é um vector que agrupa as componentes independentes do tensor das deformações:
( , )
( , ) ,
( , )
xx
yy
xy
x y
x y
x y
e (2.10)
composto pelas extensões axais xx e yy nas respectivas direcções, e pela distorção total
representada por 2xy xy , representada na Figura 2-2, sendo as restantes componentes nulas nos
EPT: 0xz yz e zz não é defenido a priori.
a)
yy
t xy
xx
,y yf u
,x xf u
,y yt u ,x xt u t
t
u
b) c)

5
A forma explícita da equação (2.3) é:
.em xx x
yy y
xy x y
x u
y u
y u x u
(2.11)
Figura 2-2 Campo de deformações
A relação constitutiva de elasticidade (2.2), devido às hipóteses de não consideração de
deformações residuais neste documento e de linearidade física, que impõe localmente a relação entre
as tensões e as deformações, é:
,s De
em que s e e já foram definidos anteriormente, faltando apenas referir o significado da matriz D .
Esta representa o operador elástico, também denominada matriz das relações constitutivas.
Admitindo que o material é homogéneo e isotrópico, toma a seguinte forma:
2
1 0
1 0 ,1
0 0 1 2
E
D (2.12)
em que E é o modulo de elasticidade, ou de Young, e é o coeficiente de Poisson.
A forma explícita da equação (2.2) para EPT é:
2
2
1
.1
2 1
xx xx yy
yy xx yy
xy xy
E
E
E
(2.13)
2.2 Condições de fronteira
A fronteira da peça, ( ), é decomposta nas duas regiões, fronteiras cinemáticas e fronteiras
estáticas, em que as condições que caracterizam o problema são impostas. As equações (2.4) e (2.5)
descrevem, pela ordem apresentadas, as condições da fronteira estática ( t ) e as condições da
fronteira cinemática ( u ). Essas condições também são designadas por condições de Neumann (ou
condições de fronteira naturais) e por condições de Dirichlet (ou condições de fronteira essenciais),
respectivamente.
xxdxdxyydy
dy xy

6
As parcelas obtidas da decomposição, caracterizadas por linhas que delimitam a área, são
regiões complementares por não ser fisicamente possível impor num ponto, simultaneamente, uma
força e o deslocamento correspondente.
A condição de fronteira estática (2.4) define o estado de tensão na fronteira que equilibra as
forças aplicadas, possuindo a matriz uma composição similar a , mas onde os seus elementos
representam as componentes da normal exterior unitária da fronteira em questão:
0
.0
T x y
y x
n n
n n
N (2.14)
O vector t agrupa as forças de fronteira aplicadas, podendo estas ser distribuídas numa linha
ou concentradas num ponto, Figura 2-1 c):
.x
y
t
t
t (2.15)
A forma explícita da equação (2.4) é:
.em x xx y xy
tyy yy x xy
n n t
n n t
x (2.16)
A condição de compatibilidade na fronteira, a equação (2.5), assegura que os deslocamentos
medidos no domínio, através do campo de deslocamentos ( u ), junto ao contorno, são coerentes com
os deslocamentos que aí estejam impostos ( u .
A forma explícita da equação (2.5) é:
.em xx
uyy
u u
u u
(2.17)
Existe, ainda, um terceiro tipo de fronteira exterior. Uma fronteira mista onde é imposta uma
força e a componente complementar do deslocamento correspondente:
.em xx
jyy yy x xy
u u
n n t
(2.18)
Num lado vertical esta condição de fronteira resulta, normalmente, de simplificações de simetria.
A expressão complementar definiria a condição de fronteira decorrente de uma condição de
anti-simetria:
.xx xx y xy
yy
n n t
u u
(2.19)
Será ainda de salientar as condições que são artificialmente introduzidas no problema, devido à
divisão do domínio em elementos finitos mais simples. Nestas fronteiras deve ser garantida a
continuidade dos deslocamentos:
( ) ( ) ,em i k ju u (2.20)

7
em que os índices i e k identificam dois elementos que partilham a fronteira interior j , assim como
o equilíbrio das forças em qualquer ponto da fronteira:
( ),( ) ( ),( ) ,em j i j k j t t t (2.21)
sendo t a força aplicada exteriormente sobre a fronteira.
As forças na fronteira de um elemento são calculadas recorrendo à condição de equilíbrio na
mesma (2.4), a qual é válida para qualquer secção do domínio da peça:
( ),( ) ( ) ( ),( ) ,T em para o elemento j i i j i j iN σ t (2.22)
em que N é a matriz de equilíbrio (2.14) escrita para a fronteira j do elemento i e ( ),( )j it o vector
das forças que, nessa fronteira, equilibram o estado de tensão no elemento.
Como as normais exteriores de dois elementos que partilham a mesma fronteira interior são
simétricas, a condição de equilíbrio (2.21) pode ser expressa directamente em termos do estado de
tensão em cada elemento, na forma:
( ),( )( ),( ) ( ) ( )T em .j ij i i k j N σ σ t (2.23)
É de salientar que, em função das três componentes do campo de tensões serem relacionadas
apenas por duas condições, é possível que numa fronteira j se desenvolvam campos de tensões
diferentes, ( ) ( )i kσ σ , nos elementos que a partilham, mas que, ainda assim, equilibrem as forças
exteriores impostas, o que se traduz num enfraquecimento da continuidade do campo de tensões,
resultante da discretização da peça.
Nos domínios que foram estudados, isto é, peças compostas por dois ou mais elementos, na
fronteira que separa diferentes materiais, não há, regra geral, continuidade das tensões, mas
unicamente o equilíbrio das componentes normais e tangenciais das tensões de ambos os lados
desta fronteira.


9
3 Elementos Finitos
O Método dos Elementos Finitos (MEF) é um método numérico para a resolução de sistemas de
equações diferenciais parciais, presentes em inúmeros problemas com relevância para a Engenharia.
Este método, na sua forma mais convencional, a de Elementos Finitos de deslocamentos
compatíveis, permite obter soluções aproximadas onde não vêm verificadas de forma local as
condições de equilíbrio, tanto no domínio, como na fronteira.
Para garantir a qualidade dos resultados obtidos, é de elevada relevância a correcta introdução
dos dados do problema a nível do seu domínio e condições de fronteira.
De acordo com as hipóteses mencionadas, o problema em análise é caracterizado com base
nas variáveis cinemáticas, de deslocamentos e deformações, e nas variáveis estáticas, de forças e
tensões.
As duas formulações abordadas nas secções seguintes consistem em diferentes abordagens,
para a imposição da aproximação ao sistema, mas regem-se pelas mesmas equações presentes no
Quadro 2-1.
Na formulação Primal (forma convencional) parte-se de uma solução cinematicamente
admissível, isto é, uma solução em que é imposta a aproximação dos campos de deslocamentos de
maneira forte, tendo este de ser um campo contínuo no domínio da peça e que satisfaça as
condições de fronteira limítrofes e interiores, onde estão impostos deslocamentos. A continuidade
exigida ao campo de deslocamentos torna-se necessária para a obtenção de um campo de
deformações compatível associado.
Através das relações constitutivas que relacionam as deformações com os campos de tensões,
iremos obter estes últimos, com as respectivas condições de equilíbrio verificadas de maneira fraca,
pelo que, geralmente, não respeitam o equilíbrio tanto no domínio como na fronteira, conduzindo,
portanto, a soluções que estão contra a segurança.
Na formulação Dual, o ponto de partida será uma solução estaticamente admissível, que
satisfaça as condições de equilíbrio no domínio e na fronteira, incluindo as fronteiras interiores. A
resolução desta formulação é inversa à metodologia anterior, sendo que se impôs, de maneira forte, a
aproximação estática e se irá obter, de maneira fraca, as condições no campo de deformações e,
consequentemente, para o campo de deslocamentos, através das relações constitutivas e de
compatibilidade, respectivamente.
Se chegar à conclusão que ambas as formulações são integralmente respeitadas e se as
relações constitutivas de elasticidade também o forem, o que geralmente não acontece, estamos
perante a solução exacta. A solução exacta existe sempre e é única, embora possa não ter
expressão analítica.
3.1 Formulação Primal
Serão apresentadas, neste ponto, as relações fundamentais de compatibilidade, constitutivas e
de equilíbrio, resumidas no Quadro 2-1 para problemas de elasticidade linear em EPT.

10
A resolução do MEF, na sua forma convencional, pode ser resumida em quatro fases.
3.1.1 Primeira fase: Aproximações
Inicia-se pela discretização da estrutura e aproximação de um campo de deslocamentos ( u )
compatível, isto é, um campo contínuo em todo o seu domínio ( ), e que satisfaz as condições de
fronteira cinemáticas ( u), de acordo com o problema a resolver:
( , )
( , ).
x
y
u x y
u x yu (3.1)
Os deslocamentos ( , )iu x y são obtidos a partir da combinação linear de deslocamentos nodais
por funções de aproximação polinomiais, definidas de modo a terem valor unitário num vértice e nulo
nos restantes. Para assegurar que os deslocamentos envolvidos representam os deslocamentos
reais nos nós:
,nu ψu (3.2)
1
,, ,n
i i nii=
u x y x y u (3.3)
com,
1
( , )0
se
se
i j j
j ix y
j i (3.4)
Garante-se ainda que, a aproximação permite definir a função polinomial mais simples, a função
unitária:
1
1. n
ii=
x, y (3.5)
As definições das funções de aproximação utilizadas serão explicadas mais detalhadamente no
capítulo seguinte.
Devido à hipótese da linearidade geométrica, a condição de compatibilidade (2.3) é imposta
localmente, através das relações deformações – deslocamentos:
,e = Bu (3.6)
.B= Aψ (3.7)
A matriz B é uma matriz que agrupa em cada uma das suas colunas j o valor das
deformações existente no elemento, quando se impõe 1ju = e se garante que todos os restantes
deslocamentos independentes 0ku com k j .
A relação de elasticidade, (2.2), é localmente imposta para definir o campo de tensões em cada
elemento:
.ns DBu (3.8)
3.1.2 Segunda fase: Forças Nodais Equivalentes
A equação resolvente do elemento é estabelecida, interpretando o balanço energético resultante
da igualdade dos trabalhos interiores ( iW ) e exteriores ( eW ),

11
T ,i xx xx yy yy xy xyW d d
e s ε σ + ε σ +γ σ (3.9)
T T ,e x x y y x x y yW d d d d
u f u t u f + u f u t + u t (3.10)
T T T ,d d d
e s u f u t (3.11)
como uma condição de equilíbrio de forças nodais equivalentes:
.int extF F (3.12)
As forças internas, devido à deformação do elemento, são dadas por:
,int e nF K u (3.13)
reunindo a matriz de rigidez do elemento as forças devidas aos deslocamentos nodais:
T .d
eK B DB (3.14)
O vector das forças exteriores (aplicadas) é composto por:
,ext f t nF = F + F + F (3.15)
onde as forças equivalentes às forças de massa são obtidas por:
T ,f d
F = ψ f (3.16)
as forças equivalentes às forças aplicadas nas fronteiras são obtidas por:
T ,t d
F = ψ t (3.17)
e as forças concentradas aplicadas nos nós do elemento, nF .
3.1.3 Terceira fase: Equação Resolvente
A solução aproximada em cada elemento está sujeita à condição de ser cinematicamente
admissível, sendo construída de maneira a satisfazer localmente (ou de maneira forte) a condição de
fronteira cinemática (2.5) da malha de elementos finitos e, ainda, a condição equivalente (2.20) entre
elementos.
Essa condição é imposta relacionando os deslocamentos nodais dos elementos, . nu ., com os
deslocamentos nodais da malha de elementos finitos, q , através de uma condição de incidência nodal
(I):
.n u qI (3.18)
As forças nodais equivalentes (interiores e exteriores) na malha de elementos finitos definem as
resultantes das contribuições das forças nodais equivalentes geradas em cada elemento:
T .Q = FI (3.19)
Para haver equilíbrio entre as forças interiores e exteriores tem que ser ter:
,int extQ = Q (3.20)
sendo esta expressão equivalente a:
T T T T
1 1 1 1
,n n n n
int ext e exti= i= i= i=
F F K q = FI I I I I (3.21)

12
resumindo-se em:
.G extK q = Q (3.22)
Este sistema de equações define as condições de equilíbrio das forças nodais equivalentes,
impondo aproximadamente (ou de maneira fraca) as condições de equilíbrio no domínio (2.1) e na
fronteira estática (2.4).
3.1.4 Quarta fase: Análise da Solução
Resolvido o sistema (3.22) nas incógnitas do problema, os deslocamentos nodais da malha de
elementos finitos, q , os deslocamentos, as deformações e as tensões são calculadas em cada
elemento recorrendo às aproximações (3.2), (3.6) e (3.8), depois de determinar os deslocamentos
nodais em cada elemento, através da relação de incidência (3.18).
3.1.5 Funções de aproximação
No programa Primal a definição das funções de aproximação dos deslocamentos não usa
funções de interpolação nodal, como é habitual no MEF, mas conjuntos de funções associadas aos
vértices, lados e elementos que permitem, na mesma, garantir a continuidade dos deslocamentos.
As funções associadas aos vértices são os polinómios lineares de Lagrange, também usados
nos elementos triangulares de deformação constante, e representados na Figura 3-1.
Figura 3-1 Polinómios de Lagrange
As funções associadas a cada lado são polinómios de grau superior a 1 e nulas nos restantes
lados do elemento, sendo representadas, na Figura 3-2, as funções para cada um dos lados e para o
2º e 3º grau.
Figura 3-2 Funções associadas aos lados dos elementos
Funções do 2º grau
Funções do 3º grau

13
As funções associadas aos elementos são polinómios de grau superior a 2, nulos no contorno
dos elementos, sendo designadas como função de bolha. A função polinomial de menor grau (3º
grau) está representada na Figura 3-3.
Figura 3-3 Função do 3º e 4º grau associada ao elemento
A continuidade do campo dos deslocamentos é garantida quando se usam os mesmos pesos
para as funções associadas ou ao mesmo vértice ou ao mesmo lado, notando-se que, para as
funções ímpares associadas aos lados, é preciso trocar o sinal de um dos pesos conforme ilustrado
na Figura 3-4, devido à forma de implementação dos elementos no programa Primal.
Figura 3-4 Exemplo da correcção do sinal de uma função lateral ímpar
As funções associadas aos elementos, como são nulas nas fronteiras, não interferem nas
condições de continuidade.
3.2 Formulação Dual
3.2.1 Formulação híbrida de equilíbrio global
Ao contrário da formulação de elementos finitos anteriormente descrita, a formulação híbrida de
elementos de equilíbrio procura satisfazer, de uma forma forte, as condições de equilíbrio no domínio
do elemento. Para o conseguir, o procedimento habitual consiste em aproximar em cada elemento
um campo de tensões equilibrado, o qual pode ser descrito na forma:
( )e,( ) ( ) 0,( ),ii i i σ S s σ (3.23)
Funções do 3º grau
Funções do 4º grau

14
em que ( )iS é a matriz das funções de aproximação das tensões no elemento finito i , em que as
tensões em cada coluna são auto equilibradas, i.e.:
T( ) ,i A S 0 (3.24)
( )is é o vector dos pesos associados a essas funções, e 0,( )iσ é uma solução particular de esforços,
que equilibra as cargas aplicadas no elemento i :
T0,( ) ( ) .i i A σ f 0 (3.25)
Estas aproximações são realizadas independentemente em cada elemento, sendo a matriz ( )iS
composta por três linhas, correspondentes às três componentes das tensões a aproximar, e tantas
colunas n, quantos os polinómios linearmente independentes obtidos para o grau da aproximação, p,
pretendido.
Recorrendo ao triângulo de Pascal, podemos observar quais os monómios a ser combinados
para cada polinómio, para um determinado grau p, para cada uma das componentes das tensões.
O número total de funções de aproximação (não equilibradas) será 23 1 1 / 2p p .
Atendendo às condições devidas a (2.9), existem 22 / 2p p restrições, sobrando assim
2 7 6 / 2p p funções polinomiais linearmente independentes de aproximação em ( )iS , para o grau
p, como se representa abaixo:
1 0 0 0 0
0 1 0 0 0
0 0 1 0
0 3 .
1 7
2 12
2
2
x y x
x y y
y 0 -x -2xy
p n
p n
p n
(3.26)
Para obtermos as funções de aproximação, recorremos ao Método da Função de Tensão de Airy
como descrito em (Lamas, 1981), onde Airy reparou que, desprezando as forças de massa devido às
restrições de (2.9), existe uma função H tal que:
, xyxxxx xy
H H H H
y x x y x y x y
e uma função G tal que:
. yy yxyy yx
G G G G
x y y x x y x y
Como xy yx , tem de existir uma função, , tal que:
, H Gy x
o que se traduz pela existência de uma única função de tensões , garantida pelas equações de
equilíbrio, tal que

15
2 2 2
2 2 .xx yy xyy x x y
Além das condições no dominio temos de garantir também o equilíbrio nas suas interfaces ( )j ,
entre elementos, pelo que é necessário que as tracções nos lados dos elementos adjacentes e as
tracções aplicadas se equilibrem,
T T T( ),( ) e,( ) ( ),( ) e,( ) ( ),( ) e,) (( ))( .j a a j b b jj i i
i
j N σ N σ t N σ t (3.27)
Para impor esta condição é usada a sua forma fraca, utilizando umas funções de ponderação
que, como se verá adiante, podem ser interpretadas fisicamente como as funções de aproximação de
deslocamentos no lado. Assim, e atendendo a (3.23), obtemos:
( )( ) ( ),( ) ( ) ( ),( )T T T T T
( )( ) 0,( ) ( )
j j j
jij j i j j ii ii i
jd d d
V N S s V N σ V t (3.28)
em que ( )jV representa a função de aproximação dos deslocamento, na interface ( j ). Pode-se aplicar
esta condição desta forma, porque, além de ser mais fácil de impor computacionalmente, para as
funções polinomiais ( )jV , se o seu grau for igual ou superior ao grau das aproximações das tensões
( )iS (condição que é assegurada pelos programas utilizados), impor a forma fraca implica que a
equação (3.27) é satisfeita em cada ponto, ou seja, na sua forma forte.
Designando:
( )
( )T T
( ( )),( ) ( ),( ) ,j
j j ij i i d
D V N S (3.29)
T
( )
( ) ( )( ) ,j
j
jj d
Vt t (3.30)
( )
0,( ),( ) ( )T T
( ),( ) 0,( ) ,j
j ij i ij d
V Nt σ (3.31)
é possível escrever a equação (3.28) na sua forma compacta,
( ( ) 0,( ),( )( ),( ) ) . j j ij ii i
i D s t t (3.32)
Para procurar a solução que melhor respeite as condições de compatibilidade temos que usar a
forma fraca das respectivas equações, usando ( )iS como funções de ponderação, mas, ao contrário
da aproximação de equilíbrio, nada se diz quanto à relação da forma fraca com a forma forte.
Assim, a equação:
1e , D σ ε (3.33)
que equivale à equação de elasticidade no domínio (2.2), mas escrita na forma de flexibilidade, e com 1 D f fica:
( ) ( ) ( )
T T T( ) 0,( ) (( )( ) ) ( )( ) .
i i i
ii ii i i id d d
S S s S σ S A uf f (3.34)
Procedendo à integração por partes do membro direito da equação, e atendendo a (3.24):
( ) ( ) ( )
T T T T( )( ) ( ) ( ) 0,( ) ( ) ( ),( ) ( ) .
i i j
ii i i i i j i ij
d d d
S S s S σ S N uf f (3.35)

16
Os deslocamentos nos lados que pertencem à fronteira cinemática são substituídos pelo seu
valor ( )( ) jj u v em u , e pela aproximação ( )( ) ( ) jj jVu v nos restantes lados, ficando a equação
cinemática:
( ) ( ) ( ) ( )
T T T T T T( ) ( ) ( )( ) ( ) 0,( ) ( ) ( ),( ) ( ) ( ) ( ),( ) .
i i j u j
i j ji i i i j i j i j iij j
d d d d
S S s S σ S N V S Nf f v v (3.36)
Designando:
( )
T( ) ( ) ( ) ,
i
i i i d
F S Sf (3.37)
( )
0,( ) (T
) 0,( ) ,i
i i i d
e S σf (3.38)
( )
T T T( ),( ) ( ) ( ),( ) ( ) ,
j
j i i j i j d
D S N V (3.39)
( )
T T( )( )( ),( ( ) ( )) , ,
u j
ji ji j i d
S N vv (3.40)
é possível escrever a equação de compatibilidade no domínio do elemento finito na sua forma
compacta:
T( ) ( ) 0,( )( ) ( )( ),( ) ,( ) .i jj i jii i F s D e vv (3.41)
Juntando estas equações, (3.32) e (3.41), para todos os elementos e todos os lados, obtém-se o
sistema de equações abaixo, que permite calcular, de entre as aproximações do modelo, o campo de
tensão equilibrado mais compatível.
T
0
0
-F D s
t t0
e
D
v
v
(3.42)
3.2.2 Formulação de equilíbrio adoptada
Para não ter de resolver o sistema global, pode-se utilizar a técnica proposta em (Moitinho de
Almeida & Maunder, 2009), onde este é subdividido em vários sistemas locais, de menores
dimensões, tantos quanto o número de vértices da malha, aplicando em cada um deles um conjunto
de forças obtido a partir da solução compatível, previamente calculada pela formulação convencional
de deslocamentos.
Cada sistema local, associado a um vértice da malha, junta todos os elementos que partilham
esse vértice, designando-se o conjunto como a estrela do vértice ( (v)St ). O contorno deste conjunto,
excluindo a sua intersecção com (v)St , forma um subconjunto ( (v)Lk ), que terá propriedades
próprias importantes na conjugação das diferentes estrelas. Na Figura 3-5 representa-se um exemplo
de uma estrela. Quando o contorno contém o vértice no qual se centra a estrela, a estrela é
denominada de estrela aberta, caso contrário denomina-se de estrela fechada.

17
Figura 3-5 Estrela de um vértice, totalidade da estrela e seu contorno
A técnica passa por considerar que, em cada estrela, é aplicada uma partição de unidade que
multiplica a solução no seu interior, através de n funções ( )ei xΨ tais que,
( )1
1n
ei x
i
Ψ , 0( )i x CΨ , ( ) 0 \ ( ) e
i x x St i Ψ
Essa partição vai dar origem a um conjunto de forças fictícias dadas por,
T( )e ei i b A Ψ σ (3.43)
que equilibram cada estrela como exemplificado abaixo.
No sistema, apresentado na Figura 3-6, é possível sabermos a priori os campos de tensões da
solução exacta, devido à sua simplicidade, mas o mesmo servirá de exemplo para a aplicação do
método sugerido acima.
Figura 3-6 Sistema com solução conhecida (a) e sua discretização (b).
Aplicando a partição da unidade ao vértice B, obtemos a seguinte estrela, Figura 3-7
Figura 3-7 Estrela do vértice B ( ( )St B ) a) e o seu contorno ( ( )Lk B ) b)
onde as funções eiΨ , de modo a respeitarem as condições 1B
i e AEC
0B , tomam as seguintes
expressões,
1
2
(1 )
(1 )
B
B
x y
x y
a) b)
a) b)

18
Aplicando a partição da unidade às cargas aplicadas na fronteira da ( )St B , obtemos uma carga
de variação linear, como exemplificado na Figura 3-8 b)
2 1,0
2 1,1
0B
B
q
q q
Os campos de tensões que servirão para a determinação das forças fictícias dadas por (3.43),
serão os resultantes da solução compatível, mas, neste exemplo, o campo de tensões existente na
peça é conhecido, sendo:
0
0
xx
yy
xy
q
Neste caso particular, funções de BiΨ são iguais, pelo que originarão forças fictícias iguais, uma
vez que, o campo de tensões também é o mesmo para ambos os elementos. Assim,
T 1 0 10
0 1 1 00
B ei i
b A Ψ σ
De modo análogo, podem-se obter as forças fictícias para as restantes estrelas com vértices no
contorno.
Na estrela do vértice interior, E, as condições que as funções ei devem respeitar são 1E
i e
AB BC CD DA, , , ,0E , o que conduz às seguintes funções:
1
2
3
4
2(1 )
2(1 )
2
2
E
E
E
E
y
x
y
x
Obtendo-se as seguintes forças fictícias:
1 1
2 2
3 3
4 4
0 0 2 00
0 2 0 00
2 0 0 20
0 0 2 00
0 0 2 00
0 2 0 00
2 0 0 20
0 0 2 00
T
T
T
T
E E
E E
E E
E E
q
q
b A σ
b A σ
b A σ
b A

19
Na figura que se segue, encontram-se representadas as forças fictícias obtidas, e pode-se
constatar que cada uma das estrelas representadas está em equilíbrio tanto de forças como de
momentos e, ainda, que a soma de todas estas representa o problema inicial proposto.
Figura 3-8 Estrelas A,B,C,D e E e suas forças fictícias.
Sendo cada estrela equilibrada, pode resolver-se cada uma através de um sistema semelhante
ao descrito na formulação global, mas de menor dimensão, obtendo-se por sobreposição de todas as
estrelas uma solução equilibrada.
No entanto, como cada um destes sistemas não tem em conta a ligação aos elementos
adjacentes, a compatibilidade não é considerada convenientemente.
Para corrigir esse efeito, propõe-se a aplicação de um termo correctivo na equação de
compatibilidade em cada estrela, que procura que as deformações resultantes se aproximem o mais
possível das deformações da solução compatível, de forma que se obtém uma solução equilibrada,
mais compatível, mas, nunca melhor que a obtida pela formulação global. Contudo, esta solução
tende a ter um menor custo computacional, proporcional ao número de estrelas, à medida que
aumenta o refinamento da malha.
Na aplicação da partição da unidade, existem três abordagens à forma de impor as condições
de fronteira numa estrela, que dependem se a estrela, (v)St , ou o seu contorno, (v)Lk , intersectam a
fronteira do domínio da peça. As diferentes abordagens recaem sobre as seguintes opções que se
seguem, representadas na Figura 3-9:
d0 impor condições de fronteira de Neumann em todas as arestas da estrela, utilizando
para as arestas pertencentes a u , as tracções continuas obtidas na solução
compatível, multiplicadas pelas funções de partição da unidade, para as arestas, não
pertencentes ao (v)Lk ;
a) Estrela do vértice A b) Estrela do vértice B
d) Estrela do vértice D e) Estrela do vértice C
c) Estrela do vértice E

20
d1 impor condições de fronteira de Neumann homogéneas em todas as arestas do
contorno da estrela. Considerar a partição da unidade dos campos prescritos (Dirichlet
ou Neumann) para as arestas no interior da estrela;
d2 Considerar a partição da unidade dos deslocamentos na fronteira em todas as arestas
com condições de fronteira de Dirichlet
A opção d0 é a única possível quando, nem a estrela nem o seu contorno, intersectam a
fronteira do domínio, garantindo-se, assim, que o equilíbrio é preservado quando se combinam as
diferentes soluções locais. De todas as soluções possíveis é escolhida a que minimiza a
incompatibilidade das tensões correspondentes, ou seja, a que minimiza a energia das tensões
complementares.
Quando o contorno da estrela intersecta uma fronteira com condições de Dirichlet, é possível
aplicarmos as condições homogéneas de Dirichlet ou as condições homogéneas de Neumann. Sendo
que, no primeiro caso, por estarmos a aplicar as condições impostas no início do problema, podemos
ser levados a concluir que estamos perante uma solução que, será à partida, mais compatível, o que
não é necessariamente verdade porque, se tornamos a solução mais compatível numa das arestas,
não quer dizer que, em termos médios, a estrela seja mais compatível, podendo mesmo ocorrer
incompatibilidades mais acentuadas nas restantes arestas. O segundo caso tem a seu favor o facto
de que não podemos procurar a solução mais compatível de todas as equilibradas, pois isto
requereria uma análise global, perdendo-se o intuito local deste método, sendo que, o custo da
aplicação destas condições é que as condições de compatibilidade entre estrelas não são garantidas,
mas serão minimizadas, uma vez que a solução escolhida será aquela que minimizar as diferenças
entre os deslocamentos obtidos e os resultantes da aplicação da partição da unidade à solução
compatível.
A opção d2, não permite a aplicação das condições de Neumann, sendo apenas aplicadas as
condições de Dirichlet, impondo-se os deslocamentos iniciais em todas as fronteiras.
Figura 3-9 Imposição das condições de fronteira
d0 d1 d2
Estrela aberta
Estrela fechada

21
4 Erros e avaliação das soluções
O MEF é uma forma de obtermos uma representação, geralmente aproximada (como maior ou
menor grau exactidão), do que sucede na realidade. Como tal, inerente à sua utilização está a
necessidade de podermos quantificar a quão boa é a solução obtida, avaliando os prováveis erros
que possam ocorrer, podendo estes ser de diversas origens.
Uma das fontes de erro, não avaliada neste trabalho, são os erros de modelação, que
contemplam as hipótese simplificativas como a linearidade física e geométrica, bem como as
aproximações das propriedades mecânicas dos materiais, adoptadas para a construção do modelo
matemático. Uma forma de avaliar este erro seria executando modelos físicos e comparando os seus
resultados com os obtidos pelo MEF, podendo-se quantificar os erros, e proceder a afinações do
modelo matemático.
O facto dos elementos presentes na execução do MEF poderem não se adaptar na perfeição à
peça modelada e, ainda, ao facto de a peça a modelar poder não representar exactamente a peça
real, dá origem a erros de discretização do domínio. Neste trabalho, este erro não existe por
tratarmos de exemplos sem correspondência física materializada e de modelos com uma geometria
poligonal, ao qual se adaptam perfeitamente os elementos triangulares de lados planos utilizados.
Outro erro de discretização advém de utilizarmos funções para aproximar os campos envolvidos
no MEF, e estas aproximações geralmente não contêm na sua base a solução exacta, o que conduz
a que, por mais que se melhore a malha, as soluções podem aproximar-se tendencialmente da
solução exacta, mas nunca coincidirão com a mesma.
Em paralelo com todos os erros anteriores, existem sempre erros de origem numérica,
resultantes dos cálculos processados aquando da execução dos programas. Quanto maior o volume
de cálculos, por exemplo, devido ao refinamento da malha, maior será este tipo de erro, mas, no
aspecto geral, o erro total será menor, pois diminuímos o erro de discretização, e este tem, em geral,
um maior significado.
Uma vez que tenhamos uma solução compatível e uma solução equilibrada, é possível
estabelecer uma “baliza” para a energia potencial total da solução exacta e, ainda, estimar o erro de
ambas as soluções do mesmo problema.
Em seguida, apresenta-se a formulação para a definição do erro dos campos aproximados e
estabelecem-se limites para a energia de deformação para certos casos particulares.
Será ainda referido um processo usual para a obtenção de uma estimativa da energia potencial
do sistema, quando dispomos de dois conjuntos complementares de soluções, através da
extrapolação Dual.
4.1 Medidas de erro
O erro é entendido como a diferença entre a solução aproximada e a solução real. Visto que, na
maioria das vezes, não dispomos da solução exacta, caso contrário a aproximada seria inútil, temos

22
de encontrar processos que permitam avaliar a qualidade do erro de uma forma que não envolva a
solução exacta.
Genericamente, o erro pode ser medido em tensões ou deslocamentos.
A partir de uma solução compatível, o erro do campo de deslocamentos, ce , e o erro do campo
de tensões , e , são:
,c c e u u (4.1)
.c c e = σ σ = σ D Au (4.2)
A partir de uma solução equilibrada apenas faz sentido medirmos o erro do campo de tensões,
pois, em geral, não é possível encontrar o campo de deslocamentos eu :
.e ee =σ σ (4.3)
Como é mais abrangente medir o erro em tensões, as fórmulas que se seguem serão em função
destas e veremos como se podem utilizar medidas globais de energia para aferição da qualidade da
solução. Obteremos, assim, um “erro quadrático em termos médios”, uma vez que, as formulações
Primal e Dual utilizam, para a determinação da energia de deformação, respectivamente, as
expressões que se seguem:
T1,
2U d
u ε D ε (4.4)
T1,
2U d
σ σ σf (4.5)
obtendo-se, assim, sempre valores positivos, dado que D e f são matrizes positivas definidas.
A norma energética do erro do campo de esforços é definida como:
T
E.σ d
e e D e (4.6)
É possível demonstrar que:
2
2T T
E
1 1 1
2 2.
2U d d
σ σ σ σ σ σf f (4.7)
Tal como em (Duarte, 2008), conforme (Pereira, 1996), demonstra-se que um majorante da
norma energética do erro, , é dado por:
T.c e c e d
σ σ σ σf (4.8)
Segundo (Beckers, Zhong, & Debongnie, 1994), também, é possível escrever o majorante
anterior sob a forma de energia potencial mecânica, como,
2 ( ) .*c e u σ (4.9)
O valor do erro mencionado pode ser obtido a vários níveis, sendo que, a nível elementar, para
cada um dos elementos i , pertencentes ao domínio, tem-se
( )
T
( ) ,( ) ,( ) ,( ) ,( )E( ),
i
i c i e i c i e iid
fσe σ σ σ σ (4.10)

23
em que ( )i é o indicador do erro no elemento i .
A nível global, o majorante da norma energética é obtido através das contribuições elementares,
( ) i , pela norma euclidiana, ou seja,
2( ) .
ii (4.11)
4.2 Limite de energia de deformação
Pelos Princípios dos Mínimos da Energia Potencial, , e da Energia Potencial Complementar, * , tal como descrito em (Duarte, 2008), podemos chegar a valores limites de energia para , a
partir da solução compatível, e para * , a partir da solução equilibrada. Assim, temos:
( ) ( ),c u u (4.12)
qualquer que seja o campo de deslocamentos cu , e :
( ) ( ),* *e σ σ (4.13)
qualquer que seja o campo de tensões equilibrado e .
Manipulando a última expressão podemos escrever:
* *( ) ( ),e σ σ (4.14)
e, uma vez que, para a solução exacta temos:
* 0, u σ (4.15)
ou seja,
* , σ u (4.16)
estabelecendo-se os seguintes limites:
* * ( ) ( ).e c σ σ u u (4.17)
Atendendo a (4.15) e à mesma expressão escrita em função dos deslocamentos e das tensões,
respectivamente:
* 0,c c u σ (4.18)
0,*e e σ σ (4.19)
e, ainda, às expressões (4.12) e (4.13), podemos concluir
* *( ) ( ),c σ σ (4.20)
e
* *( ) ( ).e σ u (4.21)
Existe uma relação entre a energia potencial e a energia de deformação, medida nos programas
utilizados, estabelecendo-se limites da energia de deformação para os diferentes casos de carga.

24
Caso se tenha apenas cargas aplicadas, ou seja, se 0 ε e 0 u , a energia potencial e a energia
potencial complementar vêm escritas, respectivamente, como
T T T1,
2t
d d d
fσ ε u t u (4.22)
e
* T1.
2d
σ ε (4.23)
De salientar que, neste caso, a energia potencial complementar, coincide com a energia de
deformação do sistema. Como ε fσ , tem-se que:
* T1( ) .
2
dσ σ σf (4.24)
Se for construída uma solução compatível, tem-se:
* * T T1 1( ) ( ) ( ) ( ).
2 2c c c cd d U U
f fσ σ σ σ σ σ σ σ (4.25)
Caso se construa uma solução equilibrada, tem-se:
* T T1 1( ) ( ) ( ) ( ).
2 2e e e ed d U U
f fσ σ σ σ σ σ σ σ (4.26)
Assim, será possível fixar-se limites para a energia de deformação exacta, entre as energias de
deformação da solução Primal (limite inferior) e da solução Dual (limite superior), para o caso de só
termos força aplicadas.
( ) ( ) ( ).c eU U U σ σ σ (4.27)
Caso se tenha apenas deslocamentos impostos, ou seja, se 0f e 0 t , a energia potencial
e a energia potencial complementar vêm escritas, respectivamente, como:
T1,
2d
σ ε (4.28)
e
T T1.
2u
d d
σ ε t u (4.29)
Neste caso, a energia potencial do sistema coincide com a energia de deformação, e tal como
no caso anterior, temos ε σf , podendo-se escrever:
T1( ) .
2d
fσ σ σ (4.30)
Na situação de uma solução compatível, tem-se que:
T T1 1( ) ( ) ( ) ( ) ( ) ( ).
2 2c c c c cd d U U
f fu u σ σ σ σ σ σ σ σ (4.31)
Caso seja construída uma solução equilibrada, então:
T T1 1( ) ( ) ( ) ( ) ( ) ( ).
2 2e e e e ed d U U
f fσ u σ σ σ σ σ σ σ σ (4.32)

25
Assim, no caso de termos apenas deslocamentos impostos, os limites de energia de deformação
invertem-se, em relação ao caso anterior, sendo:
( ) ( ) ( ).e cU U U σ σ σ (4.33)
Nas situações em que se verifica (4.27), ou (4.33), a expressão (4.9) pode tomar a seguinte
forma:
2 ( ) .c eU U σ σ (4.34)
Nos cálculos que serão efectuados, o majorante utilizado será o do erro em energia, por
diferença entre as energias de deformação (coincidentes com a energia potencial nesta caso):
( ) .energ c eU U σ σ (4.35)
4.3 Extrapolação Dual A extrapolação Dual, permite obter uma estimativa a posteriori da energia potencial do sistema,
se se dispuser de dois conjuntos de soluções i e j , obtidos através de elementos finitos de
equilíbrio e compatíveis.
Seguindo-se a formulação exposta em (Pereira, 1996), se se admitir a convergência dos n
valores i é monotónica e do tipo:
,i iN (4.36)
sendo Ni o número de graus de liberdade da malha, então,
log log .i ia b N (4.37)
Para um valor de arbitrado e n ≥ 3, a e b podem ser obtidos por regressão linear.
Se se admitir que a convergência dos n valores j é monotónica e do tipo:
,j jN (4.38)
então,
log log .j ic d N (4.39)
Para um valor de arbitrado e m ≥ 3, c e d podem ser obtidos por regressão linear.
Quando se refinam modelos compatíveis ou equilibrados, desde que a malha refinada contenha
a anterior, a convergência da energia potencial total é sempre monotónica.
O valor de pode ser estimado como sendo aquele que minimiza:
1
2
1
2log log log l .og
i j
n m
i i j ia b N c d N
(4.40)

26
Na prática, os valores de a , b , c e d não têm de ser determinados explicitamente, pois devido
às propriedades da regressão linear (4.40) é igual a:
22 2 2
1 1 1 1
2 22
1 1 1
1 1 1
log log log log
log log log log
2 log log log log
n
n n n n
i i i ii= i= i= i=
n n n
i i i ii= i= i=
n n n
i i i ii= i= i=
n N N
N N
N N
22
1 1
22 2 2
1 1 1 1
1 1 1
1
2 22
log log
log log log log
log log log log
2 log
m
n n
i ii= i=
m m m m
j jj j j j
j
j j j
j
j
m m m
j j j j
m
n N N
m N N
N N
2
2
1
1 1
1
log log log
log logm n
j i
m m
j j j j
j
j
j
j
N N
m N N
(4.41)

27
5 Desenvolvimento do processo de solução
Neste capítulo, apresenta-se um problema de aplicação das formulações primal e dual híbrida, já
mencionadas. Será descrita a estruturação dos dados iniciais com vista à aplicação prática dos
programas Primal e Dual.
Considera-se uma peça laminar plana quadrada, em consola, tal como se indica na Figura 5-1,
sujeita a uma força de fronteira, no lado oposto ao encastramento, distribuída no plano da parede.
A dimensão da placa é 1L , e a sua espessura será desprezada por estarmos perante EPT.
Figura 5-1 Caso de estudo
A geração da geometria e da malha foi executada recorrendo à aplicação Gmsh, criando-se o
ficheiro *.geo, denominado no caso em estudo 2hs.geo (two half square), e os ficheiros *.msh, que
receberam a designação 2hs###e.msh, onde ### representa as diferentes malhas geradas, através
do seu número de elementos.
O ficheiro *.geo contém a geometria descrita através dos vários elementos:
pontos (Point)
Point(a) = {b, c, d, e};
onde a designa a identificação numérica atribuída ao ponto, b, c e d, as coordenadas x, y e z,
no espaço Euclidiano tridimensional e e o comprimento característico da malha em redor do
ponto, servindo de base para a definição do tamanho dos elementos de malha, através da
interpolação linear dos comprimentos característicos dos pontos consecutivos;
linha orientada (Line),
Line(f) = {g, h};
onde f designa a identificação numérica atribuída à linha e, b e c indicam os pontos em que se
inicia e termina a linha;
figuras planas (Line Loop), desenhadas pelos elementos anteriores
Line Loop(i) = {j, k, -l, -m};
sendo que i designa a identificação numérica atribuída à figura, e os caracteres entre chavetas
designam as linhas utilizadas na construção da figura e a sua orientação é indicada pela
ausência ou presença do sinal negative (-);
e superfícies planas (Plane Surface), definidas no interior das figuras planas,
Plane Surface(n) = {o};
sendo n a designação da identificação numérica atribuída à superfície, e o a figura plana que a
delimita.

28
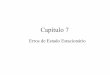
No Anexo I pode-se ver o ficheiro 2hs.geo que originou a geometria que se segue (Figura 5-2), a
qual foi a base do caso de estudo.
Figura 5-2 Geometria do caso de estudo
Nos ficheiros *.msh, estão presentes as descrições das malhas utilizadas, sendo que, as
diferenças se encontram no número de pontos e elementos (linhas, figuras, superfícies).
As diferentes malhas foram desenhadas a partir da que se exemplifica a baixo (Figura 5-3), cujo
ficheiro de texto se encontra no Anexo II.
Figura 5-3 Exemplo de uma malha aplicada ao caso de estudo
Os nós a azul coincidem com os vértices de cada elemento, enquanto que os nós a vermelho
são gerados quando especificamos no Gmsh que se trata de uma malha de elementos de segunda
ordem, e serão estes que irão representar as arestas dos elementos. As áreas a verde e azul,
representam as diferentes superfícies planas, que, por sua vez, foram divididas em 2 elementos,
triangulares, cada, para o caso da primeira malha.

29
As diferentes malhas foram obtidas fazendo-se um refinamento uniforme da malha anterior pelo
que se originou as seguintes configurações:
Figura 5-4 malhas do caso de estudo
O ficheiro *.msh contém, obrigatoriamente ,uma secção que fornece informação sobre como o
ficheiro foi gerado e a sua formatação, designada $MeshFormat.
O primeiro algarismo (2) indica a versão do programa de escrita, o segundo (0) indica o formato
de escrita, que, neste caso é ASCII, e o terceiro algarismo (8) representa um inteiro igual ao tamanho
dos números de vírgula flutuante usado no arquivo.
Em seguida, segue-se a secção $Nodes, onde são enumerados todos os nós presentes na
geometria da peça em questão (da malha de primeira e segunda ordem, isto é, nós que representam
os vértices e as arestas), precedidos apenas pela informação de quantos nós estão presentes nesta
mesma peça.
No exemplo acima, a peça seria composta por 15 nós, neste caso numerados de 1 a 15 (a
numeração consecutiva não é obrigatória), e cada linha que os representa é composta quatro
números, sendo que o primeiro designa o índice atribuído ao nó e os restantes as coordenadas X, Y e
Z, representados em virgula flutuante.
$MeshFormat 2 0 8 $EndMeshFormat
$Nodes 15 1 0 0 0 2 1 0 0 ... 15 0.5 0.75 0 $EndNodes

30
Por fim, segue-se a secção $Elements, que é composta por todos os elementos que fazem
parte da malha gerada. O primeiro valor desta secção indica quantos elementos estão nela descritos.
Cada linha é composta por cinco subconjuntos de dados, que se apresentam na seguinte
ordem:
número do elemento; tipo de elemento; número de etiquetas; etiquetas; número dos nós que
constituem o elemento.
Dos 56 tipos de elementos possíveis de se gerar na aplicação Gmsh, para o caso em estudo,
apenas três irão constar das listas de elementos das diferentes malhas, sendo estes os números:
8 – Linha de segunda ordem com 3 nós (2 nós associados aos vértices de extremidade e 1 nó
associado à aresta);
9 – Triângulo de segunda ordem com 6 nós (3 nós associados aos vértices e 3 nós associados
às arestas);
15 – Nó.
O número de etiqueta representa um número inteiro da quantidade de rótulos para o elemento n,
sendo por padrão 3, onde o primeiro é o número da entidade física à qual o elemento pertence, o
segundo é o número da entidade geométricas elementares a que o elemento pertence (entidades
presentes na Figura 5-3), o terceiro é o número de uma partição da malha a que o elemento pertence.
Quando o seu valor for zero, é equivalente a não ter rótulo.
No final de cada linha surgem os números dos nós que constituem o elemento representado na
linha de código, de acordo com a numeração da secção $Nodes.
Abaixo representa-se um excerto da secção $Elements do ficheiro da malha em questão,
colorindo-se os cinco subconjuntos acima referidos, pela ordem das cores apresentadas: vermelho;
azul; verde; laranja; roxo
A definição dos casos de carga a actuar sobre a peça é realizada no ficheiro *. boundary.
$Elements 17 1 15 3 0 1 0 1 2 15 3 0 2 0 2 ... 8 8 3 0 2 0 3 4 8 9 8 3 0 3 0 5 6 9 ... 16 9 3 0 11 0 4 6 3 13 15 8 17 9 3 0 11 0 3 6 5 15 9 11 $EndElements

31
O caso de carga representado na Figura 5-1, transcreve-se no ficheiro load1.boundary como:
onde a cada linha corresponde a definição da carga aplicada às arestas presentes na Figura 5-2,
identificadas pelo primeiro número que surge na linha. Os dois números que se seguem irão indicar
se se trata de uma fronteira estática ou cinemática nas direcções X e Y, respectivamente, de acordo
com a seguinte indicação:
0 – condição de fronteira cinemática
1 – condição de fronteira estática.
Os espaços ocupados com a sigla nan (not a number), reservam-se para futuros
desenvolvimentos dos programas Primal e Dual.
Os dois últimos números servem para a imposição dos valores de assentamentos de apoio/
cargas nas direcções X e Y, consoante se esteja perante condições de fronteira cinemática/estática.
No estabelecimento das condições de fronteira há que ter em atenção a configuração da malha,
mais concretamente casos em que temos elementos em cantos como o representado nas diferentes
malha da Figura 5-4, associados aos nós 1 e 5, onde podem ocorrer incompatibilidades estáticas,
nomeadamente diferentes valores para as tensões tangenciais verticais e horizontais das arestas
confluentes nestes nós, dependendo do carregamento e da forma de imposição das condições de
fronteira.
Para o caso de carga em questão (encastramento em uma aresta vertical e carga unitária
horizontal distribuída ao longo da aresta oposta), se o encastramento fosse colocado na aresta
vertical mais à esquerda (aresta contendo os nós 1 e 5), a abordagem 0 para as condições de
Dirichlet, é aquela em que mais se nota a necessidade do cuidado referido, em especial atenção nas
tensões tangenciais, porque, no caso em questão, a opção pela abordagem 0 implica impor tensões
ao longo da aresta vertical, que não serão equilibradas tangencialmente pelas presentes nas aresta
horizontais confluentes nos nós 1 e 5, deixando-se de ter uma solução equilibrada, como era o
objectivo. Como se trata de um encastramento nas direcções X e Y, a opção pelas abordagens 1 e 2,
produz resultados melhores, pois impõem-se deslocamentos e não tensões.
Nas figuras do Quadro 5-1, pode notar-se claramente a diferença entre os casos de carga com
encastramento à esquerda (load2) e com encastramento à direita (load1), assim como os valores
para o majorante de erro que, embora apenas se mostre no caso para 16 elementos e para uma
razão de módulos de elasticidade E1/E2=1/10, permitem concluir que, para o caso load1, são
melhores que para o caso load2, apesar de, em geral, se constatar que, na formulação Primal, o valor
da energia de deformação (Up) diminui para o caso load2, mas os valores da energia de deformação
na formulação Dual (Ud) aumentam em maior valor, devido às singularidades presentes nos cantos,
traduzindo-se numa pior solução para o majorante do erro.
1 1 1 nan nan 0 0 2 1 1 nan nan 0 0 3 1 1 nan nan 0 0 4 1 1 nan nan -1 0 5 1 1 nan nan -1 0 6 0 0 nan nan 0 0 7 0 0 nan nan 0 0

32
load
Dirichlet
0 1 2
load
1
Up=0.21071035 Up=0.21071035 Up=0.21071035
Ud= 0.21276323 Ud= 0.21127855 Ud= 0.21127854
∆U=2.05288090E-03 ∆U=5.68199870E-04 ∆U=5.68190340E-04
load
2
Up=0.21059219 Up=0.21059219 Up=0.21059219
Ud= 0.26698366 Ud= 0.21140197 Ud= 0.21140197
∆U=5.63914710E-02 ∆U=8.09784020E-04 ∆U=8.09785310E-04
Quadro 5-1Ilustação das diferenças para aplicação das condições de fronteira em função da malha.
Para a definição das propriedades mecânicas do material que constitui a parede, consideraram-
se varias razões para os módulos de elasticidade dos dois materiais constituintes da peça, e um
coeficiente de Poisson, , de 0,3.
A inserção destas propriedades no programa Primal, foi alvo de um desenvolvimento, pois o
programa apenas permitia que se definissem estes valores por alteração do próprio código do
programa, sendo que, agora, existem três opções possíveis para definição das propriedades
mecânicas, através dos valores por defeito escritos no código do programa e da leitura de um ficheiro
*.mat que pode ter duas formas alternativas de escrita.
Nos ficheiros *.mat, no formato m1, têm que se definir sete valores, para cada material, como se
exemplifica abaixo:
onde a primeira linha define o formato de escrita do ficheiro *.mat, e as seguintes linhas os materiais,
associados às diferentes superfícies planas, representadas na Figura 5-2, referenciadas pelo primeiro
m1 9 1.098901 0.329670 0 1.098901 0 0.384615 11 10.989011 3.296703 0 10.989011 0 3.846153

33
número de cada linha. Os restantes 6 números definidos são as componentes da matriz das relações
constitutivas (2.12) , sendo
9 1.098901 0.329670 0 1.098901 0 0.384615 1 2 3 4 5 6 7
Número da
superfície 21
E
21
E
21
E
2
1
2 1
E
Quadro 5-2 Componentes da matriz de organizados nesta matriz, de acordo a numeração acima, da seguinte forma:
2 3 4
3 5 6
4 6 7
D
O outro formato de escrita, m2, é semelhante, mas apenas temos e definir o módulo de
elasticidade e o coeficiente de Poisson, deixando que os cálculos que são necessários efectuar,
representados no Quadro 5-2, sejam realizados pelo computador.
Abaixo, apresenta-se o exemplo, escrito no formato m2, que gera a mesma matriz das
relações constitutivas representada acima no formato m1.
No caso em estudo, foram criados oito ficheiros *.mat, representando diferentes razões entre os
módulos de elasticidade, E1/E2, de acordo com a Figura 5-1 e o Quadro 5-3 abaixo.
*.mat E1 E2 E1E21 1 1 E1E22 1 2 E1E23 1 5 E1E24 1 10 E1E25 1 15 E1E26 1 20 E1E27 1 30 E1E28 1 40
Quadro 5-3 Lista de ficheiros *.mat
Uma vez definidos estes ficheiros, o processo de computação passa por executar na aplicação
MATLAB, sendo que, para se correr os programas Primal e Dual, devem-se definir as variáveis, que
se seguem, necessárias para a sua execução:
Basename – ficheiro contendo a malha;
Load – ficheiro contendo o carregamento/deslocamentos impostos;
Dirichlet – (0, 1, 2) para indicar a abordagem escolhida para a imposição das condições de
fronteira descritas na secção 3.2.2;
Degree_u – para indicar o grau das funções de aproximação dos deslocamentos que, neste
documento, variam desde o 2º ao 5º grau.
Degree_s – para indicar o grau das funções de aproximação das tensões que, neste documento,
variam na ordem de degree_u+1, ou seja, desde o 3º ao 6º grau.
m2 9 1 0.3 11 10 0.3

34
Após a definição destas variáveis, corre-se o programa Primal e Dual, obtendo-se, no final de
ambos, as energias de deformação de cada formulação.
Por fim, corre-se o programa Draw3 que cria as imagens sobre as quais se vai fazer uma
análise gráfica na próxima secção deste documento. Este programa também foi alvo de algumas
modificações para que se tornasse mais perceptível os gráficos criados e a escala dos seus valores.
Como uma das componentes deste trabalho passa pela análise exaustiva de soluções para que
se possa compreender a evolução destas, no caso da peça composta por dois materiais, para os
diferentes números de elementos, diferentes graus de aproximação, diferentes razões entre os
módulos de elasticidade dos materiais presente, e diferentes formas de imposição das condições de
fronteira, foi desenvolvido um programa em MATLAB, que se destinou a executar os programas
Primal, Dual e Draw3, medindo os seus tempos de execução e registando os seus diferentes
resultados, para as diferentes combinações das variáveis referidas, por forma a optimizar o tempo de
computação, eliminando-se o trabalho manual entre exemplos corridos.

35
6 Apreciação gráfica das soluções
6.1 Caso de estudo
Uma forma de organizar graficamente as soluções devido às oscilações das diferentes variáveis,
nomeadamente o número de elementos (NE), a razão dos módulos de elasticidade, por alteração do
módulo de elasticidade do segundo material (E2), e os graus das funções de aproximação dos
deslocamentos e das tensões (GA), por alteração do grau das funções dos deslocamentos, uma vez
que, o grau das tensões foi dependente deste, através da expressão degree_u+1, foi pensar num
“cubo de soluções” para cada um dos valores da variável Dirichlet, como o que se mostra na Figura
6-1.
Figura 6-1 Cubo de soluções gráficas
A primeira observação a realizar recai sobre as diferentes abordagens para a imposição das
condições de fronteira descritas na secção 3.2.2 do presente documento.
No documento (Moitinho de Almeida & Maunder, 2009), na secção 4.3.2. é referido que,
nenhuma das abordagens apresentadas se revela melhor em relação às outras, mas, em ambos os
exemplos apresentados naquele documento, apenas se avaloaram peças com condições de fronteira
livres e com encastramento deslizante, o que não introduz o efeito de restrição na direcção
perpendicular, além de toda a peça ser homogénea. No entanto, conforme se verá adiante, quando
se considerarem diferentes condições de fronteira, peças em condições semelhantes, mas
compostas por dois ou mais materiais com diferentes módulos de elasticidade, irão revelar diferenças
nas diferentes abordagens para a variável Dirichlet.
Como se pode ver a partir das figuras presentes no Quadro 6-1, obtidas para 16 elementos e
uma razão entre módulos de elasticidade E1/E2=1/10, as opções dirichlet=1 ou 2 resultam em
soluções de tensões duais melhores (e aparentemente idênticas), do que a solução com dirichlet=0,

36
para casos onde exista o efeito da restrição dos deslocamentos na direcção perpendicular à da
aplicação das tensões e o coeficiente de Poisson não seja nulo, tanto para o grau das funções dos
deslocamentos mínimo (degree_u=2) e máximo (degree_u=5).
GA
Dirichlet
0 1 2
2
5
Quadro 6-1 Diferenças dirichlet 0, 1 e 2, em caso com fronteiras cinemáticas
É visível que, na coluna dirichlet=0, para a solução dual existem alterações na continuação da
distribuição das tensões, resultantes de uma anomalia devido à forma da imposição das condições de
fronteira.
No Quadro 6-1 é também possível averiguar a melhoria significativa da solução, em qualquer
uma das opções da variável Dirichlet, devida ao aumento dos graus das funções de aproximação,
razão pela qual, a análise gráfica mais detalhada das soluções que se segue, será realizada para as
ilustrações obtidas para o valor 2 desta variável e 5/6 para o grau das funções de aproximação dos
deslocamentos/tensões, isto é, da face dianteira do “cubo de soluções” para dirichlet=2.
Nesta face, se virmos, no sentido ascendente, a coluna representada, a qual se refere a
exemplos onde se mantiveram os valores dos módulos de elasticidade constantes para ambos os
materiais (E1=1 e E2=2), podemos observar, da sequência de imagens abaixo (Figura 6-2 a Figura
6-6), que existe um padrão desenhado que se mantém, mas que, o aumento do número de
elementos produz melhores resultados por minoração sucessiva das descontinuidades entre
elementos, com especial ênfase para as representações das tensões e yy xy .
Nota-se também que, visualmente, a partir de 256 elementos já podemos considerar a solução
como bastante boa, dadas as muito poucas diferenças entre a formulação primal e dual.

37
Figura 6-2 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=10 e Ne=4
Figura 6-3 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=10 e NE=16

38
Figura 6-4 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=10 e NE=256
Figura 6-5 Representação das tensões para as formulações Primal e Dual, para GA=5/6, E2=10 e NE=1024

39
No mesmo plano do “cubo de soluções”, se percorrermos a linha assinalada, onde mantemos o
número de elementos em 256 e aumentamos o módulo de elasticidade do segundo material, a
deformada da peça e a sua distribuição de tensões alteram-se significativamente, como se pode notar
no conjunto da Figura 6-7 à Figura 6-10.
Na Figura 6-7 podemos notar a simetria/antisimetria vertical dos valores do campo de tensões,
nas suas três componentes, como seria de esperar, uma vez que, a toda a peça se comporta como
um único material devido à igualdade dos módulos de elasticidade.
Para a componente xx , é visível que, as tensões tomam o valor 1, igual ao valor do
carregamento, junto da fronteira carregada e que este se mantém assim até meio da peça, onde
surgem algumas nuances, que se acentuam nos cantos da aresta encastrada.
Nas componentes e yy xy , junto a fronteira carregada, podemos dizer que as tensões tomam
o valor nulo, fazendo-se estas notar à medida que nos aproximamos do bordo encastrado,
evidenciando o efeito da restrição do deslocamento vertical, gerando tensões yy positivas e tensões
xy de valores idênticos, mas de sinal contrário, nos cantos opostos da aresta encastrada. O sinal
contrário deve-se à deformação experienciada pela peça nestas zonas, onde, se tivermos em
atenção a orientação positiva das tensões tangenciais e o facto de estarmos a alongar as diagonais
assinaladas na Figura 6-6, percebemos o sentido das tensões nestas zonas.
Figura 6-6 Representação da deformada nos cantos superiores e inferiores da aresta encastrada

40
Figura 6-7 Representação das tensões para as formulações Primal e Dual, para GA=5/6, NE=256 e E2=1
Ao passar para a figura seguinte, Figura 6-8, onde se representa o caso em que a razão dos
módulos de elasticidade é E1/E2=1/2, repara-se que, a forma da deformada muda, ocorrendo uma
rotação da aresta carregada, mantendo-se a encastrada sem qualquer alteração.
Quebra-se a simetria vertical referida para o exemplo anterior e material mais rígido absorve
mais tensões, como era de esperar, causando a diferença das tensões verificada na aresta de
contacto entre materiais, pois, para termos uma deformada compativel, isto é, elementos de materiais
diferentes que partilhem esta fronteira, possuem extensões semelhantes, o que, de acordo com a
equação do campo de tensões para esta componente, indica que a razão das tensões deverá ser
igual à dos módulos de elasticidade. Tal pode não acontecer, por falha na compatibilidade da
solução. Repara-se ainda que, para esta componente, o gráfico aparenta indicar que o valor é de 1
junto à aresta carregada e que, a zona da maior concentração de tensões deixou de ser os cantos,
concentrando-se junto da aresta entre materiais.
Para a componente yy , as alterações são menores, mantendo-se nomeadamente a mancha de
tensões junto do bordo encastrado, devido ao efeito de restrição da deformação vertical, mas nota-se
que os valores mais elevados dentro desta mancha ocorrem nas zonas correspondentes às tensões
xx mais elevadas, introduzindo a importância do efeito de Poisson nas tensões geradas.
Na componente tangencial, junto ao bordo encastrado, a indicação dos valores e sentidos das
tensões são semelhantes ao exemplo anterior.

41
Tanto para a componente yy como para a componente xy , junto do bordo carregado, surgem
uns bolbos de tensões, gerados pelo efeito de restrição ao movimento do material 1 por parte do
material 2. Assim, no material 2, surgem tensões negativas ou de compressão e, no material 1,
tensões de positivas ou de tracção, que contraíram o movimento ascendente do material 1,
desencadeado pelas diferenças de extensões, segundo x, no material 1 (menores junto ao bordo
comum) por este estar acoplado ao material 2. Este facto também origina as tensões tangenciais aí
presentes.
Figura 6-8 Representação das tensões para as formulações Primal e Dual, para GA=5/6, NE=256 e E2=2
Ao prosseguirmos com o aumento do módulo de elasticidade do material 2, para o valor de 10,
representado na Figura 6-9, podemos nos aperceber de uma rotação mais acentuada dos elementos
da malha, com maior foco no material menos rígido e de uma diminuição geral das tensões xx no
material 1, face às que se representam para o material 2. Para esta componente do campo de
tensões, ao longo da aresta comum aos dois materiais, intensifica-se a diferença nos valores das
tensões, de acordo com o aumento do módulo de elasticidade do material 2. É ainda possível
dizer-se que, na aresta carregada, os valores das tensões segundo x são iguais aos do
carregamento, ou seja de 1. Ao examinar a componente x das tensões, parece haver, no material 2,
uma zona de transição entre a aresta carregada e, aproximadamente, o meio da peça e que, a partir
desta zona, as tensões absorvidas assemelham-se ao comportamento de uma viga em flexão
composta, com tracção na zona inferior.

42
Figura 6-9 Representação das tensões para as formulações Primal e Dual, para GA=5/6, NE=256 e E2=10
Ao continuarmos o aumento do valor de E2, apenas se nota uma intensificação das conclusões
tecidas para o exemplo anterior, com realce para o aumento da área e intensidade das tensões
tangenciais negativas no material 2, consistentes com a redução da zona de transição, neste
material, da tensão unitária para a zona com comportamento semelhante a uma viga em flexão
composta, com tracção na zona inferior. No material um verifica-se um comportamento semelhante
mas com menor intencidade no valor das tensões.

43
Figura 6-10 Representação das tensões para as formulações Primal e Dual, para GA=5/6, NE=256 e E2=40
6.2 Casos auxiliares
Para averiguar a evolução das distribuições das tensões, avaliaram-se mais dois casos de
carga, resultantes da simplificação das condições de fronteira, mas sem a exaustão de soluções
possíveis da combinação dos valores utilizados para as variáveis presentes nos eixos do cubo de
soluções, como para o caso load1.
O primeiro caso de carga, designado load3, pode ser descrito como um par de forças unitárias
distribuídas uniformemente nas arestas verticais no sentido positivo das suas normais exteriores e
está representado na Figura 6-11a), e o segundo caso, designado como load4, pode ser descrito
como uma força unitária distribuída uniformemente na aresta vertical mais à esquerda, no sentido
positivo da sua normal exterior, representado na Figura 6-11b).
Figura 6-11 Casos de carga auxiliares
a) b)

44
A situação exposta para a load1, presente no Quadro 6-1, fica sem efeito como se pode ver
pelas figuras presentes no Quadro 6-2, relativas ao caso de load3 com GA=5, NE=16, E1/E2=1/10 e
=0.3, sendo que, as ilustrações gráficas para as diferentes opções para a variável Dirichlet
apresentam-se idênticas.
Lo
ad
Dirichlet
0 1 2
load
3
Quadro 6-2 Diferenças dirichlet 0, 1 e 2, nos casos de load3
Estes casos servirão para se estabelecer mais algumas conclusões que se podem ler no
capítulo seguinte, onde, entre outros parâmetros, se volta a focar as diferenças da imposição das
condições de fronteira.

45
7 Avaliação dos resultados numéricos
7.1 Comparação com casos de carga auxiliares
Os resultados, neste capítulo, reportam as combinações dos casos de carga load1, load3, e
load4, com as razões dos módulos de elasticidade E1/E2 de 1/1 e 1/10, com os valores 0, 0.1 e 0.3
para o coeficiente de Poisson e, por fim, com as diferentes opções de Dirichlet, pretendendo-se
avaliar o efeito produzido nas soluções dos majorantes de erro, em função das opções para o
estabelecimento das condições de fronteira, do tipo de fronteira existente e do efeito da transmissão
das tensões entre direcções ortogonais pelo efeito de Poisson.
Estas combinações encontram-se organizadas no Quadro 7-1. Para facilitar a sua percepção,
note-se o padrão de números ímpares para casos de materiais homogéneos e números pares para
casos de materiais heterogéneos.
Poisson Load
v=0 v=0.1 v=0.3
Load1
1 E1/E2=1
7 E1/E2=1
13 E1/E2=1
2 E1/E2=1/10
8 E1/E2=1/10
14 E1/E2=1/10
Load3
3 E1/E2=1
9 E1/E2=1
15 E1/E2=1
4 E1/E2=1/10
10 E1/E2=1/10
16 E1/E2=1/10
Load4
5 E1/E2=1
11 E1/E2=1
17 E1/E2=1
6 E1/E2=1/10
12 E1/E2=1/10
18 E1/E2=1/10
Quadro 7-1 Combinações de casos de estudo
Em seguida, serão listadas as observações que surgiram de um conjunto vasto de soluções,
associadas a cada célula do quadro acima, podendo-se atribuir algumas destas a diferentes casos,
evidenciando certos comportamentos espectáveis e outros não tanto.
1, 3, 5, 9, 11, 15, 17
Factor comum: combinações para peças homogéneas e onde não se faz sentir o efeito da
restrição ao deslocamento vertical, em 1 devido ao coeficiente de Poisson nulo, em 3, 9, 15
pela ausência de fronteiras cinemáticas e, nas restantes, devido ao encastramento deslizante;
Podemos considerar que, estamos perante a solução exacta, uma vez que, o erro é na
ordem de 10 , o que pode ser resultante da própria computação e arredondamentos;
Diferentes opções da abordagem de Dirichlet, às condições de fronteira, conduzem à
mesma conclusão;
Aplicável a todos os casos, excepto os que se consideraram como soluções exactas;
Factor comum: peças heterogéneas e homogéneas com restrição deslocamentos verticais no
encastramento;
Para uma qualquer dada abordagem de Dirichlet, quanto maior o número de elementos,
melhor a solução, por diminuição do majorante do erro;

46
À medida que aumentamos o grau das funções de aproximação, melhoramos, em geral,
as soluções do majorante do erro, para cada opção de Dirichlet, quando comparada com a
mesma opção para o grau inferior. Como excepção, temos o caso do material
heterogéneo, onde não existem condições de fronteira cinemáticas (4, 10, 16) e as
diferentes abordagens produzem o mesmo valor para majorante do erro;
3, 4, 9, 10, 15, 16
Factor comum: inexistência de fronteiras cinemáticas
as diferentes abordagens produzem o mesmo valor para majorante do erro, mesmo para
as combinações que produziram erros muito diminutos e que se enquadram na primeira
observação (3, 9, 15)
2, 6, 7, 8, 12,13, 14, 18
Factor comum: combinações com fronteiras cinemáticas pelo menos em uma direcção e que
produzem erros não desprezáveis;
A abordagem d0 sempre pior que d1 e d2;
As abordagens d1 e d2, produzem soluções muito próximas, que tendem para o mesmo
número (até à oitava casa decimal) com o aumento do número de elementos;
As conclusões que se seguem foram baseadas no Quadro 7-2 e, idênticos a este, para as
diferentes células do Quadro 7-1, onde se representam os quocientes dos majorantes do
erro para as soluções d0 com d1, e d0 com d2.
Ao andarmos no sentido descendente em cada coluna, com o aumento do número de
elementos aproximamos a solução dual para a abordagem d0, das abordagens d1 e
d2, com excepção de alguns casos pontuais nas combinações com encastramento
total, para as malhas mais grosseiras;
Se percorrermos as linhas do mesmo quadro, as razões dos majorantes do erro
obtidas para as abordagens d0 com d1 (d0 d1⁄ ), e d0 com d2 (d0 d2⁄ ), são
semelhantes e aumentam com o aumento do grau das funções de aproximação, isto
é, as soluções duais com d1 e d2 são semelhantes e fornecem majorantes do erro
menores do que para d0 e são tanto melhores que as soluções para d0, quanto maior
for o grau das aproximações. De uma forma geral, esta observação é possível se
desprezarmos a 1ª linha, onde não se detecta nenhum padrão crescente ou
decrescente com o aumento dos graus das funções de aproximação e os valores
correspondentes às funções de aproximação mais básica, novamente para as malhas
mais grosseiras.

47
Ex_ID Load E1/E2 Poisson
2 load1 E1E212 0
degree_u/s degree_u/s degree_u/s degree_u/s
2/3 ¾ 4/5 5/6
NE ∆U
d0/d1 ∆U
d0/d2 ∆U
d0/d1 ∆U
d0/d2 ∆U
d0/d1 ∆U
d0/d2 ∆U
d0/d1 ∆U
d0/d2
4 2.09 2.20 2.28 2.37 2.33 2.40 2.31 2.37
16 2.04 2.04 2.13 2.13 2.22 2.22 2.30 2.30
64 1.82 1.82 1.98 1.98 2.10 2.10 2.19 2.19
256 1.70 1.70 1.88 1.88 2.02 2.02 2.11 2.11
1024 1.62 1.62 1.82 1.82 1.96 1.96 2.05 2.05 Quadro 7-2 Resumo dos quocientes para uma determinada célula do quadro de combinações
Outras observações foram realizadas dum ponto de vista mais exterior às células do quadro de
combinações, nomeadamente avaliando-se as suas colunas, ou seja, o aumento do efeito do
coeficiente de Poisson.
Na generalidade, os majorantes do erro aumentam, para cada abordagem de Dirichlet, com o
aumento de coeficiente de Poisson, sendo que, para os valores testados (os que fizeram sentido
realizar esta análise, ou seja, os que casos em que não consideramos a solução como exacta), no
máximo 15% dos casos não cumpriam esta conclusão, ocorrendo tal facto, geralmente, para os
valores mais baixos dos graus das funções de aproximação e para um menor número de elementos.
Esta percentagem diminui com o aumento deste coeficiente, pois a solução torna-se menos regular e
o seu efeito faz-se sentir com maior intensidade em cada elemento, afectando mesmo as soluções
mais grosseiras.
Para o caso de carga load1, ao progredirmos pelas diferentes colunas com os aumentos do
valor do coeficiente de Poisson, tanto no caso homogéneo como no heterogéneo, o aumento deste
coeficiente agrava o efeito de restrição provocado pelo encastramento, pelo que, para um maior valor
deste coeficiente, as razões ( 0 1⁄ ), e ( 0 2⁄ ) aumentam, indicando que a diferença entre a
abordagem d0 e d1 ou d2 será maior com o aumento do coeficiente de Poisson.
Se estivermos perante um caso de carga nas condições de load4, no caso com materiais
diferentes (pois o homogéneo é considerado como solução exacta), o aumento do coeficiente de
Poisson conduz a uma diminuição das razões ( 0 1⁄ ) e ( 0 2⁄ ), o que indica que o erro que surge
na interface ganha relevância perante o erro das condições de fronteira, uma vez que, neste caso,
não temos a restrição ao deslocamento vertical no bordo encastrado.
7.2 Resultados do caso de estudo
A evolução dos majorantes do erro foi analisada mais exaustivamente para o caso de carga
load1, na tentativa de percebermos o ritmo de progressão das várias soluções, para uma solução
considerada como boa, para as diferentes razões entre os módulos de elasticidade dos dois materiais
constituintes de cada peça.

48
Nesta secção, será analisada a relação da qualidade da solução com o custo computacional, o
peso das principais fontes de erro e serão retiradas ilações a partir de gráficos construídos com base
nos valores numéricos obtidos para os 576 casos executados.
7.2.1 Relação da qualidade da solução com o custo computacional
Para a avaliação da relação qualidade da solução com o seu custo computacional, os
programas Primal e Dual foram executados num sistema com menores capacidades de cálculo, o
que levou a que, apenas se tenha executado a análise até ao número máximo de 1024 elementos.
Tal procedimento foi necessário para que o ambiente de execução fosse mais controlado, pois os
programas já referidos são executados através da aplicação MATLAB, e esta, na sua linguagem,
contém comandos que permitem medir o tempo que o processador do sistema demora a efectuar
uma determinada tarefa, mas este também depende da disponibilidade do próprio processador.
Para os diferentes graus das funções de aproximação dos deslocamentos e, consequentemente,
das funções de aproximação das tensões utilizados, com o incremento do número elementos
assentes numa potência de base 4, com expoentes i=1,2,3,4 e 5, ocorre uma melhoria da solução,
por redução do majorante do erro em energia potencial variando entre 55% e 85% para a abordagem
0 de Dirichlet e de 60% a 70% para as restantes abordagens, sendo que, para cada caso analisado,
com as diferentes razões entre materiais, associado a um determinado grau de aproximação, a
melhoria relativa, dada pela redução do majorante, entre os 4 e os 16, 64, 256, 1024 segue,
aproximadamente, a distribuição que se apresenta no Quadro 7-3.
Número de elementos
Médias das melhorias relativamente à utilização de 4 elementos
Dirichlet 0 Dirichlet 1 Dirichlet 2
16 68.7% -/+ 10.1/4.6 66.5% -/+ 2.4/3.1 65.5% -/+ 2.5/3.8
64 90.3% -/+ 3.5/1.3 88.7% -/+ 1.5/1.8 88.4% -/+ 1.6/2.0
256 96.8% -/+ 1.1/0.4 96.3% -/+ 0.7/0.8 96.1% -/+ 0.7/0.9
1024 98.9% -/+ 0.4/0.1 98.8% -/+ 0.3/0.3 98.7% -/+ 0.3/0.4 Quadro 7-3 Distribuição média da melhoria da solução relativa ao caso de 4 elementos
Para as várias abordagens, as melhorias, em termos médios, seguem distribuições idênticas,
mas com amplitudes de variação maiores para a abordagem 0, como indicado pelos valores da
segunda coluna para cada abordagem, revelando uma maior instabilidade da abordagem.
Os valores presentes no seguinte Quadro 7-4, parecem indicar que obtemos melhorias mais
significativas para o aumento do número de elementos, com a abordagem 0, mas é necessário ter em
conta que, a solução de partida é uma pior solução, pelo que uma ligeira melhoria se traduz num
maior aumento da qualidade relativa, do que quando partimos de uma solução melhor, como quando
usamos as abordagens 1 e 2 de Dirichlet.
Em relação ao tempo gasto na sua computação, este aumentou em média 3.0 vezes para d0 e
3.5 vezes para d1 e d2, com o incremento do número de elementos em cada caso para cada grau
das aproximações utilizadas. A distribuição do aumento de tempo relativo ao obtido com 4 elementos,
para um determinado caso da razão de módulos de elasticidade e um determinado grau de
aproximação, segue, em termos médios, a distribuição que se encontra no Quadro 7-4.

49
Número de elementos
Aumento do tempo computacional relativamente à utilização de 4 elementos
Dirichlet 0 Dirichlet 1 Dirichlet 2
16 289.9% -/+ 37/44 345.5% -/+ 85/47 348.4% -/+ 106/74
64 804.7% -/+ 92/108 1042.9% -/+ 274/157 1223.5% -/+ 375/196
256 2385.2% -/+ 309/351 3241.9% -/+ 930/490 4026.8% -/+ 1221/749
1024 7842.0% -/+ 1105/1429 11036.7% -/+ 3312/1626 14065.8% -/+ 4553/2448 Quadro 7-4 Distribuição média dos tempos relativos ao caso de 4 elementos
As distribuições das médias dos tempos não são tão semelhantes, como as do aumento da
qualidade, para as diferentes abordagens de Dirichlet. D0 é, neste caso, a abordagem que aumenta
menos tempo com o aumento do número de elementos e a que possui menor amplitude de variação
em relação ao aumento do tempo médio em cada nível.
As distribuições d1 e d2 são mais próximas entre si, mas significativamente superiores a d0, em
especial para um maior número de elementos, sendo que, d2 acusa uma maior necessidade de
tempo e com uma maior amplitude de valores, relativamente a este aumento.
Podemos concluir que, como se viu em 7.1e se verá mais adiante, como d1 e d2 produzem
soluções quase idênticas e d1 é a abordagem que necessita de menos tempo, esta parece ser a mais
vantajosa por ter uma melhor relação qualidade/custo em tempo.
Com base nas tabelas acima, é possível construir o Gráfico 7-1, onde se pode facilmente
observar que, para o caso a ser estudado, existirá um limite a partir do qual o aumento do número de
elementos, que conduzirá ao elevado aumento do tempo de execução, não se traduzirá num aumento
significativo da qualidade da solução final.
Gráfico 7-1 Relação entre a qualidade da solução avaliada pelo número de elementos e o tempo gasto na sua computação
60%
65%
70%
75%
80%
85%
90%
95%
100%
0 20 40 60 80 100 120 140 160
Per
cen
tag
em d
a re
du
ção
do
d
e en
erg
ia
po
tên
cial
rel
ativ
amen
te a
o c
aso
de
4 el
emen
tos
Multiplos do tempo obtido para 4 elementos
Relação da melhoria relativa da solução com o tempo gasto na sua computação
Abordagem d0 Abordagem d1 Abordagem d2
64 elementos
256 elementos1024 elementos
64 elementos
1024 elementos
16 elementos
64 elementos

50
7.2.2 Oscilação das principais fontes de erro com o aumento do módulo de elasticidade do material mais rígido
As principais fontes do erro no caso estudado, serão resultantes da imposição das condições de
fronteira ao longo do bordo encastrado e da diferença de rigidez dos materiais ao longo do bordo
interior comum, com especial ênfase nas suas extremidades como se verá adiante.
Com base nos resultados obtidos e presentes no Quadro 7-5, onde se representa, tal como no
Quadro 7-2, os quocientes d0/d1 e d0/d2 mas, desta vez apenas para o caso load1, e recorrendo a
todos os casos das razões dos módulos de elasticidades presentes no Quadro 5-3, com coeficiente
de Poisson de 0.3, podendo-se notar a existência, na maioria das malhas escolhidas, nomeadamente
as de 16, 64, 256 e 1024 elementos, de um valor mínimo (representado a azul) para a aproximação
da abordagem para d0 das abordagens d1 e d2, por volta dos módulos de elasticidade do material
mais rígido com valores de 20, 30.
Para cada malha, o andamento relevante é a redução do valor dos quocientes do caso
homogéneo, de quocientes acima da dezena, até ao valor mínimo, onde em média a abordagem d0 é
três vezes superior às abordagens d1 e d2, que ocorrem para materiais significativamente
heterogéneos, indicando, como se pode ver na Figura 7-1, a perca de importância das formas da
imposição das condições de fronteira face à singularidade introduzida pela diferença dos materiais. O
número de elementos que terão valores de erro de valor significativo, mudam de local,
movimentando-se do canto superior e da aresta encastrada para a aresta comum entre os materiais e
em especial para as suas extremidades. Na mesma figura nota-se que os elementos com maiores
erros pertencem, de uma forma geral, ao material mais flexível, facto que se torna mais evidente com
o aumento da rigidez do material menos flexível.
A partir do valor mínimo dos quocientes, à medida que aumentamos a rigidez do material 2,
ocorre novamente um ligeiro aumento do quocientes, indicando que as abordagens d0 e, d1 e d2,
tornam-se a afastar, o que pode ser explicado devido à elevada exigência de deformação dos
elementos presentes no canto inferior direito do material mais flexível, atribuindo de novo um maior,
embora que não muito, peso aos erros das condições fronteira como fontes de erro.
As ocorrências visíveis nas células referentes aos casos com número de elementos de 4096,
nomeadamente as células onde a aparente ausência do andamento dos quocientes, referido acima,
para os restantes casos, podem dever-se à elevada densidade da malha, que, para o caso em
estudo, produz soluções de elevada qualidade, onde o erro fica disperso pelos diferentes elementos.
Na interpretação da figura seguinte, há que ter em consideração a forma como esta foi criada,
nomeadamente a forma estabelecida para a interpretação da escala de cores. A escala de cores foi
obtida aplicando-se a função logarítmica aos valores de erro obtidos em cada elemento, pois estes
decresciam muito rapidamente, o que não permitia a interpretação pretendida do aumento do número
de elementos com um valor representativo, sem que se estendesse demasiado a mancha de
elementos com maior erro. A encarnado escuro temos um valor superior ao valor do erro obtido com
a abordagem d0 e, para atender ao compromisso de realçar o aumento e deslocação dos elementos
com maior erro, o valor mínimo foi obtido por iterações que permitiram estabelecê-lo no valor indicado
na escala da Figura 7-1.

51
Figura 7-1 Diferenças de intensidade e localização do erro para as abordagens d0, d1 e d2

52
Load Poisson
load1 0.3
NE E2
degree_u / s degree_u / s degree_u / s degree_u / s
2 / 3 3 / 4 4 / 5 5 / 6
∆U d0 / d1
∆U d0 / d2
∆U d0 / d1
∆U d0 / d2
∆U d0 / d1
∆U d0 / d2
∆U d0 / d1
∆U d0 / d2
4 1 8.80 8.62 13.20 13.17 13.73 13.72 14.92 14.91
4 2 9.43 9.46 6.78 6.85 9.30 9.44 8.53 8.58
4 5 10.39 10.77 2.85 2.92 6.13 6.30 3.28 3.32
4 10 10.95 11.53 2.54 2.62 5.51 5.67 2.65 2.70
4 15 11.22 11.90 2.68 2.77 5.36 5.52 2.69 2.74
4 20 11.38 12.12 2.82 2.93 5.31 5.47 2.78 2.83
4 30 11.58 12.39 3.04 3.16 5.26 5.42 2.93 2.99
4 40 11.70 12.54 3.19 3.31 5.25 5.41 3.04 3.11
16 1 12.35 12.32 12.68 12.67 14.37 14.37 15.62 15.61
16 2 8.80 8.79 7.66 7.66 9.30 9.30 10.57 10.57
16 5 6.03 6.03 3.75 3.75 4.31 4.31 4.69 4.69
16 10 5.54 5.53 3.15 3.15 3.44 3.44 3.61 3.61
16 15 5.43 5.42 3.08 3.08 3.32 3.32 3.47 3.47
16 20 5.38 5.38 3.09 3.09 3.31 3.31 3.45 3.45
16 30 5.34 5.34 3.14 3.14 3.33 3.33 3.48 3.48
16 40 5.33 5.33 3.18 3.18 3.36 3.36 3.52 3.52
64 1 11.70 11.67 11.78 11.78 13.91 13.91 15.48 15.48
64 2 7.67 7.66 7.78 7.78 9.78 9.78 11.31 11.31
64 5 4.11 4.10 3.59 3.59 4.33 4.33 4.90 4.90
64 10 3.43 3.43 2.88 2.88 3.29 3.29 3.59 3.59
64 15 3.30 3.30 2.80 2.80 3.16 3.16 3.42 3.42
64 20 3.27 3.27 2.81 2.81 3.15 3.15 3.39 3.39
64 30 3.27 3.27 2.85 2.85 3.18 3.18 3.42 3.42
64 40 3.28 3.28 2.89 2.89 3.22 3.22 3.45 3.45
256 1 10.85 10.82 11.53 11.53 13.84 13.84 15.54 15.54
256 2 7.42 7.40 8.30 8.31 10.48 10.48 12.14 12.14
256 5 3.63 3.63 3.79 3.79 4.65 4.65 5.33 5.33
256 10 2.87 2.87 2.91 2.91 3.39 3.39 3.75 3.75
256 15 2.75 2.75 2.81 2.81 3.22 3.22 3.52 3.52
256 20 2.73 2.73 2.81 2.81 3.19 3.19 3.47 3.47
256 30 2.75 2.75 2.85 2.85 3.22 3.22 3.48 3.48
256 40 2.77 2.77 2.89 2.89 3.25 3.25 3.51 3.51
1024 1 10.47 10.44 11.51 11.52 13.90 13.90 15.63 15.63
1024 2 7.68 7.67 8.89 8.89 11.17 11.18 12.90 12.90
1024 5 3.66 3.66 4.08 4.08 5.07 5.07 5.85 5.85
1024 10 2.79 2.79 3.02 3.02 3.55 3.55 3.95 3.95
1024 15 2.66 2.65 2.88 2.88 3.33 3.33 3.65 3.65
1024 20 2.63 2.63 2.87 2.87 3.28 3.28 3.58 3.58
1024 30 2.65 2.65 2.90 2.90 3.29 3.29 3.57 3.57
1024 40 2.67 2.67 2.93 2.93 3.31 3.31 3.58 3.58
4096 1 10.38 10.36 11.56 11.57 3.32 3.32 2.65 2.70
4096 2 8.13 8.11 9.45 9.46 3.16 3.16 3.61 3.61
4096 5 3.89 3.89 4.45 4.45 3.22 3.22 3.59 3.59
4096 10 2.87 2.87 2.91 2.91 3.33 3.33 3.75 3.75
4096 15 2.69 2.69 2.98 2.98 3.45 3.45 3.80 3.80
4096 20 2.66 2.66 2.95 2.95 3.38 3.38 3.70 3.70
4096 30 2.67 2.67 2.97 2.97 3.37 3.37 3.65 3.65
4096 40 2.67 2.67 2.93 2.93 3.31 3.31 3.58 3.58
Quadro 7-5 Quocientes d0/d1 e d0/d2 para load1

53
7.2.3 Apreciação dos gráficos
Da análise dos resultados facilmente se conclui, que, como esperado, o incremento, tanto no
número de elementos, como nos graus das funções de aproximação dos deslocamentos e das
tensões, conduz a uma melhoria da solução, por uma diminuição do majorante do erro em energia
potencial, como se pode ver nos seguintes Gráfico 7-2 e Gráfico 7-3, para o caso de E1/E2=1/10,
onde as variáveis de ambos os eixos se encontram representadas só na forma logarítmica.
Gráfico 7-2 Variação da diferença de energia potencial entre a solução Primal e a solução Dual, com o aumento do número de elementos, em casos com fronteiras cinemáticas para uma determinada razão dos módulos de
elasticidade
1.0E‐06
1.0E‐05
1.0E‐04
1.0E‐03
1.0E‐02
1.0E‐01
4 16 64 256 1024 4096
Dif
eren
ça d
e en
erg
ia p
otê
nci
al e
ntr
e a
solu
çãoPrimal
e a
solu
ção
Dual
Número de elementos
Variação da diferença de energia potêncial entre a solução Primal e a solução Dual, com o aumento do número de elementos
2/3 ‐ d0 3/4 ‐ d0 4/5 ‐ d0 5/6 ‐ d0
2/3 ‐ d1 3/4 ‐ d1 4/5 ‐ d1 5/6 ‐ d1
2/3 ‐ d2 3/4 ‐ d2 4/5 ‐ d2 5/6 ‐ d2
relação E1/E2 = 1/10
Grau da das funções de aproximação dos deslocamentos/tensões - solução de imposição das condições de fronteira

54
Gráfico 7-3 Variação da diferença de energia de deformação entre a solução Primal e a solução Dual, com o aumento do grau das funções de aproximação dos deslocamentos/tensões, em casos com fronteiras cinemáticas
para uma determinada razão dos módulos de elasticidade
Pode-se notar nos gráficos acima que, tal com já foi referido, em condições semelhantes, a
abordagem d0, produz piores soluções que as abordagens d1 e d2, que produzem soluções
semelhantes entre si. Repare-se ainda que, para a malha grosseira de 4 elementos, ao passarmos
do 3º para o 4º grau das funções de aproximação dos deslocamentos, ao contrário do que seria
esperado, deu-se um aumento do majorante de erro, o que pode ser possível por a solução do 4º
grau não conter na sua base a solução do grau inferior, devido a uma diferente aproximação as
tensões resultantes da formulação Primal, para a imposição das condições de fronteira.
Para os diferentes casos da razão entre os módulos de elasticidade estudados, os gráficos
apresentam andamentos semelhantes, havendo apenas ligeiras mudanças na gama dos erros para
cada unidade do eixo horizontal e pequenas translações de todo o conjunto, sendo que, quanto
menor a razão entre os módulos, maior é o erro medido.
1.0E‐06
1.0E‐05
1.0E‐04
1.0E‐03
1.0E‐02
1.0E‐01
2 3 4 5
Dif
eren
ça d
e en
erg
ia potêncial e
ntr
e a
solu
çãoPrimal
e a
solu
ção
Dual
Grau das funções de aproximação do campo de deslocamentos
Variação da diferença de energia potencial entre a solução Primal e a solução Dual, com o aumento do grau das funções de aproximação dos
deslocamentos/tensões
4 ‐ d0 16 ‐ d0 64 ‐ d0 256 ‐ d0 1024 ‐ d0 4096 ‐ d0
4 ‐ d1 16 ‐ d1 64 ‐ d1 256 ‐ d1 1024 ‐ d1 4096 ‐ d1
4 ‐ d2 16 ‐ d2 64 ‐ d2 256 ‐ d2 1024 ‐ d2 4096 ‐ d2
Número de elementos - solução de imposição das condições de fronteira
relação E1/E2 = 1/10

55
Uma conclusão geral a todos os gráficos analisados, é que existe uma clara distinção entre os
erros obtidos quando se utiliza a abordagem 0 (descrita no ponto 3.2.2), em relação às abordagens 1
e 2 que produzem valores semelhantes, muitos até coincidentes na oitava casa decimal. Tal
observação justifica-se com a forma com que cada abordagem impõe as condições de fronteira e
pelo facto do caso em estudo possuir uma fronteira cinemática (fronteira encastrada), o que conduz a
majorantes de erro superiores e, consequentemente, a uma pior solução para a abordagem 0.
Em face da análise acima, a partir deste ponto, apenas serão utilizados os resultados obtidos
para a imposição das condições de fronteira pela abordagem d2, isto é, considerando a partição da
unidade dos deslocamentos na fronteira em todas as arestas, com condições de fronteira de Dirichlet.
É também visível que, o grau das funções de aproximação que produzem melhores resultados é o
conjunto 5/6, nomeadamente para os deslocamentos/tensões, pelo que será apenas este o visado
nos desenvolvimentos que se seguem.
Para que se pudesse realizar um estudo sobre a solução obtida, comparando-se a evolução
decrescente dos módulos de elasticidade (1/k com k=1,2,5,10,15,20,30 e 40), recorreu-se à
extrapolação dual para, a partir dos dois conjuntos de soluções disponíveis, compatíveis e
equilibradas, estimar-se o valor da solução exacta e, assim, podermos obter um erro relativo em cada
caso.
Este processo baseou-se nos valores obtidos para a energia potencial para a formulação
Primal e Dual, para os casos de 256, 1024 e 4096 elementos. Tais valores, assim como os resultados
extrapolados e os resíduos resultantes, encontram-se no seguinte quadro
Razão dos módulos de elasticidade
Modelação Número de elementos
Extrapolação Resíduo 256 1024 4096
1/1 Dual 0.49390222 0.49389940 0.49389842
0.4938978966 1.61E-06 Primal 0.49388727 0.49389419 0.49389660
1/2 Dual 0.36153477 0.36153188 0.36153096
0.3615305231 8.01E-05 Primal 0.36152061 0.36152725 0.36152942
1/5 Dual 0.26039912 0.26039131 0.26038897
0.2603879619 8.34E-06 Primal 0.26036946 0.26038227 0.26038620
1/10 Dual 0.21105058 0.21103353 0.21102820
0.2110257703 6.01E-07 Primal 0.21099344 0.21101548 0.21102249
1/15 Dual 0.18908685 0.18906285 0.18905512
0.1890514545 3.29E-07 Primal 0.18900982 0.18903789 0.18904704
1/20 Dual 0.17618377 0.17615470 0.17614519
0.1761405735 1.95E-07 Primal 0.17609253 0.17612468 0.17613532
1/30 Dual 0.16145223 0.16141644 0.16140451
0.1613985513 7.83E-08 Primal 0.16134245 0.16137970 0.16139222
1/40 Dual 0.15320607 0.15316608 0.15315262
0.1531458014 1.54E-07 Primal 0.15308484 0.15312512 0.15313879
Quadro 7-6 Confronto das soluções Primal e Dual
Como se pode averiguar, os valores dos resíduos são bem diminutos, pelo que temos uma
indicação de que a extrapolação dual produziu bons resultados.
Podemos utilizar os valores extrapolados como medida de aferição da qualidade da formulação
Primal e da formulação Dual, ao invés do conjunto das duas como realizado até agora por avaliação
do majorante do erro. No gráfico que se segue, estão representados os valores de energia potencial

56
para cada caso do número de elementos avaliado, para a razão dos módulos de elasticidade
E1/E2=1/10.
Gráfico 7-4 Energias potenciais Primal, Dual e Extrapolada
Apesar do Gráfico 7-4 apenas ser referente à razão 1/10 dos módulos de elasticidade, o Quadro
7-7 permite concluir que, para as diferentes razões avaliadas, com o aumento do número de
elementos, as linhas da energia potencial Primal e Dual possuem um andamento semelhante ao
representado, embora com valores absolutos distintos. Em todos estes casos, temos um boa
convergência de soluções para o caso em estudo com o número máximo de elementos escolhidos,
sendo que, a solução Primal fornece sempre um limite inferior para a energia potencial, o que está de
acordo com a afirmação “prova-se que modelos completos e conformes (ou compatíveis) produzem
soluções que correspondem a limites superiores da rigidez real da estrutura, isto é, deslocamentos da
solução aproximada são menores que os da solução exacta (que é mais flexível).” como em (Lamas,
1981). No mesmo documento pode-se ler “modelos não conformes (ou equilibrados) produzem ao
contrário, em geral, limites superiores da solução exacta, isto é, convergentes por cima.”, tal como se
pode constatar no Gráfico 7-4 e nos valores Quadro 7-7.
2.100E‐01
2.102E‐01
2.104E‐01
2.106E‐01
2.108E‐01
2.110E‐01
2.112E‐01
2.114E‐01
2.116E‐01
2.118E‐01
4 16 64 256 1024 4096En
erg
ia d
e d
efo
rmaç
ão d
as s
olu
ções
Primal
e a
Dual
Número de elementos
Variação da energia de potencial da solução Primal e da solução Dual, com o aumento do número de elementos
Primal Dual Extapolação
relação E1/E2 = 1/10

57
E2 NE Energia potencial Valor
Extrapolado
Erro da solução
Primal Dual Primal Dual
1 / 1 4 0.49365309 < 0.49399916
0.493897897
2.45E-04 > 1.01E-04
1 / 1 16 0.49381155 < 0.49393348 8.63E-05 > 3.56E-05
1 / 1 64 0.49386753 < 0.49391030 3.04E-05 > 1.24E-05
1 / 1 256 0.49388727 < 0.49390222 1.06E-05 > 4.32E-06
1 / 1 1024 0.49389419 < 0.49389940 3.71E-06 > 1.50E-06
1 / 1 4096 0.49389660 < 0.49389842 1.30E-06 > 5.23E-07
1 / 2 4 0.36122287 < 0.36166856
0.361530523
3.08E-04 > 1.38E-04
1 / 2 16 0.36143471 < 0.36157345 9.58E-05 > 4.29E-05
1 / 2 64 0.36149997 < 0.36154391 3.06E-05 > 1.34E-05
1 / 2 256 0.36152061 < 0.36153477 9.91E-06 > 4.25E-06
1 / 2 1024 0.36152725 < 0.36153188 3.27E-06 > 1.36E-06
1 / 2 4096 0.36152942 < 0.36153096 1.10E-06 > 4.37E-07
1 / 5 4 0.25973906 < 0.26079371
0.260387962
6.49E-04 > 4.06E-04
1 / 5 16 0.26019069 < 0.26051335 1.97E-04 > 1.25E-04
1 / 5 64 0.26032766 < 0.26042535 6.03E-05 > 3.74E-05
1 / 5 256 0.26036946 < 0.26039912 1.85E-05 > 1.12E-05
1 / 5 1024 0.26038227 < 0.26039131 5.69E-06 > 3.35E-06
1 / 5 4096 0.26038620 < 0.26038897 1.76E-06 > 1.01E-06
1 / 10 4 0.21004757 < 0.21179321
0.21102577
9.78E-04 > 7.67E-04
1 / 10 16 0.21071035 < 0.21127854 3.15E-04 > 2.53E-04
1 / 10 64 0.21092456 < 0.21110508 1.01E-04 > 7.93E-05
1 / 10 256 0.21099344 < 0.21105058 3.23E-05 > 2.48E-05
1 / 10 1024 0.21101548 < 0.21103353 1.03E-05 > 7.76E-06
1 / 10 4096 0.21102249 < 0.21102820 3.28E-06 > 2.43E-06
1 / 15 4 0.18788940 < 0.19005563
0.189051455
1.16E-03 > 1.00E-03
1 / 15 16 0.18866547 < 0.18939259 3.86E-04 > 3.41E-04
1 / 15 64 0.18892427 < 0.18916149 1.27E-04 > 1.10E-04
1 / 15 256 0.18900982 < 0.18908685 4.16E-05 > 3.54E-05
1 / 15 1024 0.18903789 < 0.18906285 1.36E-05 > 1.14E-05
1 / 15 4096 0.18904704 < 0.18905512 4.41E-06 > 3.67E-06
1 / 20 4 0.17486123 < 0.17730663
0.176140574
1.28E-03 > 1.17E-03
1 / 20 16 0.17570850 < 0.17654372 4.32E-04 > 4.03E-04
1 / 20 64 0.17599598 < 0.17627270 1.45E-04 > 1.32E-04
1 / 20 256 0.17609253 < 0.17618377 4.80E-05 > 4.32E-05
1 / 20 1024 0.17612468 < 0.17615470 1.59E-05 > 1.41E-05
1 / 20 4096 0.17613532 < 0.17614519 5.25E-06 > 4.62E-06
1 / 30 4 0.15997815 < 0.16276943
0.161398551
1.42E-03 > 1.37E-03
1 / 30 16 0.16091031 < 0.16188168 4.88E-04 > 4.83E-04
1 / 30 64 0.16123240 < 0.16155973 1.66E-04 > 1.61E-04
1 / 30 256 0.16134245 < 0.16145223 5.61E-05 > 5.37E-05
1 / 30 1024 0.16137970 < 0.16141644 1.89E-05 > 1.79E-05
1 / 30 4096 0.16139222 < 0.16140451 6.33E-06 > 5.96E-06
1 / 40 4 0.15164349 < 0.15464017
0.153145801
1.50E-03 > 1.49E-03
1 / 40 16 0.15262466 < 0.15367786 5.21E-04 < 5.32E-04
1 / 40 64 0.15296686 < 0.15332500 1.79E-04 < 1.79E-04
1 / 40 256 0.15308484 < 0.15320607 6.10E-05 > 6.03E-05
1 / 40 1024 0.15312512 < 0.15316608 2.07E-05 > 2.03E-05
1 / 40 4096 0.15313879 < 0.15315262 7.01E-06 > 6.82E-06 Quadro 7-7 Confronto das soluções Primal e Dual

58
Como se pode verificar na representação gráfica, da média da erro Primal com o Dual, abaixo,
aplicando-se a função logarítmica de base 4 ao eixo com os números de elementos e a função
logarítmica de base 10 ao eixo majorante do erro relativo em energia potencial, cada conjunto de
valores associados a um determinado grau de funções de aproximação para os
deslocamentos/tensões, é representado por uma recta, sendo que, para os diferentes valores da
razão dos módulos de elasticidade, obtemos rectas com declives semelhantes, o que se traduz pela
conclusão de que, embora o erro seja diferente à partida, o ritmo de progressão para a solução
exacta muito pouco se altera. Facilmente se observa que, quanto menor o quociente entre os
módulos de elasticidade, maior será o erro inicial.
Gráfico 7-5 Variação da média do entre o erro da solução Primal e da solução Dual, com o aumento do número de elementos
De um modo geral, a solução Dual produz melhores resultados, como se pode constatar no
Quadro 7-7, nas colunas referentes ao erro da solução, onde é visível que, apenas com a excepção
de uns poucos casos para malhas grosseiras e diferenças acentuadas de módulos de elasticidade, a
solução Dual é aquela onde a diferença entre o valor extrapolado e o valor calculado é menor. Tal
observação era expectável, uma vez que na solução Primal o equilíbrio apenas é garantido
globalmente, e a solução Dual, partindo dos resultados da solução Primal, melhora-os impondo o
equilíbrio local, obtendo-se assim uma solução melhor, isto se a solução Primal for razoável, pois
caso não o seja, acontece tal como referido na excepção acima e obtemos, como para o caso das
malhas relativamente grosseiras de 16 e 64 elementos e para a razão de 1/40 dos módulos de
elasticidade, casos em que a solução Primal forneceu um valor mais próximo do extrapolado.
7.000E‐07
7.000E‐06
7.000E‐05
7.000E‐04
4 16 64 256 1024 4096
Méd
ia d
o e
ntr
e o
err
o d
a so
luçã
o P
rim
al e
da
solu
ção
Du
al
Número de elementos
Variação da média do entre o erro da solução Primal e da solução Dual, com o aumento do número de elementos
1 / 1 1 / 2 1 / 5 1 / 10 1 / 15 1 / 20 1 / 30 1 / 40

59
8 Conclusões e desenvolvimentos futuros
Neste trabalho, apresentaram-se as variáveis e caracterizou-se o comportamento de peças
laminares em estados planos de tensão, compostas por materiais distintos, avaliando-se o erro em
energia potencial e a influência das suas fontes no seu valor.
Uma das conclusões que mais se fez sentir ao longo das diversas análises foi a fraca qualidade
da solução, em casos com fronteiras cinemáticas, da abordagem d0 para a introdução das condições
de fronteira na formulação de equilíbrio adoptada, concluindo-se que, a imposição das abordagens
mais compatíveis, d1 e d2, produzem melhores resultados, ao contrário do referido no documento
(Moitinho de Almeida & Maunder, 2009) onde não se estabelece nenhuma conclusão sobre as três
abordagens.
As conclusões referentes ao aumento do número de elementos e do grau das funções de
aproximação são, como o expectável, de que as soluções melhoram com o aumento de ambas estas
variáveis. Dos valores obtidos, detecta-se que a evolução para uma solução de melhor qualidade se
faz a ritmos semelhantes, caso se dê um aumento do número de elementos de forma uniforme ou
com o incremento unitário dos graus das funções de aproximação, mas há a desvantagem de se ter
que atender à limitação do grau máximo permitido para estas nos programas utilizados, enquanto
que, em geral, o aumento do número de elementos, em sistemas computacionais de boas
capacidades, se traduz num aumento do tempo de processamento.
Como desenvolvimentos possíveis do estudo efectuado, realça-se o refinamento adaptativo da
malha, baseado num valor admissível, pré estabelecido, para a diferença entre os valores de energia
potencial da formulação primal e da formulação dual, desenvolvendo-se um programa de soluções
iterativas com geração da malha mais fina apenas onde será necessário. Outro desenvolvimento
interessante seria a introdução de materiais anisotrópicos, para poder simular os materiais reforçados
com fibra, cada vez mais utilizados em engenharia civil.
Outra questão a avaliar será a forma de resolução dos sistemas para as abordagens d1 e d2,
pois a abordagem d2, em que se impõem as condições cinemáticas em todas as fronteiras em que
existem, deveriam resultar em sistemas de menores dimensões, logo de resolução mais rápida.
A variável do coeficiente de Poisson avaliada neste documento foi considerada variável para a
comparação de casos, mas nunca diferente para os dois materiais do mesmo caso, podendo este
aspecto ser alvo de desenvolvimentos futuros também.
Será também útil a elaboração de um guia de utilização dos programas computacionais
utilizados, mais detalhados que o presente neste documento, nomeadamente dos processos que
decorrem desde a introdução dos dados até aos resultados em energia de deformação, visto que se
tratam de programas mais virados para a vertente de estudo académico. A elaboração de uma
interface gráfica para a introdução dos ficheiros a utilizar, assim com as variáveis a definir, nos
programas de “auto run” desenvolvidos, também facilitariam a sua utilização.


61
Bibliografia
Beckers, P., Zhong, H. G., & Debongnie, J. F. (1994). Dual analysis with general boundary
conditions. COMPUTER METHODS IN APPLIED MECHANICS AND ENGINEERING (122 (1995)),
183-192.
Duarte, M. J. (2008). Análise dual de lajes através de elementos finitos híbridos. Dissertação de
Mestrado. Lisboa: UTL-IST.
Freitas, J. A. (2009). Método dos Elementos Finitos: Análise de Problemas de Elasticidade
Plana. IST, DECivil. Lisboa: UTL-IST.
Lamas, A. (1981). Algumas Notas Das Lições Sobre Elasticidade Plana. Lisboa: UTL-IST.
Moitinho de Almeida, J. P., & Maunder, E. A. (2009). Recovery of equilibrium on star paches
using a partition of unity techique. INTERNATIONAL JOURNAL FOR NUMERICAL METHODS IM
ENGINEERING (79), pp. 1493-1516.
Pereira, O. J. (1996). Utilização de elementos finitos de equilibrio em refinamanto adaptativo.
Tese de Doutoramento. Lisboa: UTL - IST.


Anexos


65
Anexo I - 2hs.geo
Point(1) = {0, 0, 0,1}; Point(2) = {1, 0, 0,1}; Point(3) = {0, 0.5, 0,1}; Point(4) = {1, 0.5, 0,1}; Point(5) = {0, 1, 0,1}; Point(6) = {1, 1, 0,1}; Line(1) = {1, 2}; Line(2) = {3, 4}; Line(3) = {5, 6}; Line(4) = {1, 3}; Line(5) = {3, 5}; Line(6) = {2, 4}; Line(7) = {4, 6}; Line Loop(8) = {1, 6, -2, -4}; Plane Surface(9) = {8}; Line Loop(10) = {2, 7, -3, -5}; Plane Surface(11) = {10};


67
Anexo II – 2hs4e.msh
$MeshFormat 2 0 8 $EndMeshFormat $Nodes 15 1 0 0 0 2 1 0 0 3 0 0.5 0 4 1 0.5 0 5 0 1 0 6 1 1 0 7 0.4999999999986717 0 0 8 0.4999999999986717 0.5 0 9 0.4999999999986717 1 0 10 0 0.2499999999993359 0 11 0 0.7499999999992069 0 12 1 0.2499999999993359 0 13 1 0.7499999999992069 0 14 0.5 0.25 0 15 0.5 0.75 0 $EndNodes $Elements 17 1 15 3 0 1 0 1 2 15 3 0 2 0 2 3 15 3 0 3 0 3 4 15 3 0 4 0 4 5 15 3 0 5 0 5 6 15 3 0 6 0 6 7 8 3 0 1 0 1 2 7 8 8 3 0 2 0 3 4 8 9 8 3 0 3 0 5 6 9 10 8 3 0 4 0 1 3 10 11 8 3 0 5 0 3 5 11 12 8 3 0 6 0 2 4 12 13 8 3 0 7 0 4 6 13 14 9 3 0 9 0 1 2 3 7 14 10 15 9 3 0 9 0 2 4 3 12 8 14 16 9 3 0 11 0 4 6 3 13 15 8 17 9 3 0 11 0 3 6 5 15 9 11 $EndElements