-
BAB 4
KONTROL MOTOR SINKRON
1. PENYINKRONAN TOMBOL-TEKAN
Terdapat dua fungsi dasar dari kontrol motor sinkron.
a. Kontrol motor sinkron berarti bahwa motor dapat diasut
sebagai suatu motor induksi. Hasilnya, motor dapat diasut dengan
menggunakan sebarang skema pengasutan motor
induksi yang umum, termasuk juga menghubungkan langsung jala
jala atau dengan menggunakan autotrafo, tahanan primer atau alat
lainnya.
b. Kontrol motor sinkron juga menyebabkan motor sampai pada
kecepatan sinkronnya dengan mengeksitasi medan dc. Perbedaan dasar
antara kontrol motor sinkron dan
kontrol motor induksi terletak pada kontrol medan.
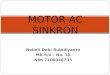
Pada gambar 4.1, motor sinkron diasut sebagai suatu motor
induksi dengan menekan tombol
START. Ketika motor mencapai kecepatan maksimumnya, tombol-tekan
RUN ditutup untuk
meng-energize koil F dan menutup kontak eksitasi dc F. Kontak
kontak ini, nantinya, membuka kontak pengosongan medan N.C. F, dan
meng-energize medan.
Ammeter dan rheostat yang ditunjukkan pada gambar 4.1 memberikan
kontrol arus eksitasi.
Faktor daya sebesar 1 dari motor dapat diperoleh dengan mengatur
rheostat untuk
memperoleh suatu pembacaan minimum pada ammeter ac. Jika medan
dc dieksitasi pada
suatu tingkat yang lebih besar, maka suatu faktor daya leading
akan tercipta dimana berguna
untuk sistem distribusi yang lagging.
Gambar 4.1 Diagram elementer penyinkronan tombol-tekan
-
Ammeter dan rheostat pada rangkaian dc di gambar 4.1 memberikan
kontrol arus eksitasi.
Faktor daya motor yang unity dapat diperoleh dengan mengatur
rheostat untuk memperoleh
pembacaan yang minimum dari ammeter. Jika medan dc dieksitasi
pada tingkat yang lebih
besar, maka akan dihasilkan faktor daya yang leading akan
dihasilkan dimana sangat berguna
bagi suatu sistem distribusi yang lagging.
Penyesuaian suatu rangkaian mungkin menyebabkan arus medan atau
arus jala jala, melebihi rating motor. Akibatnya, instrumen -
instrumen listrik harus harus dilengkapi untuk
memantau parameter parameter rangkaian sehingga operator dapat
mencegah rusaknya peralatan akibat overload tripping. Pembacaan
instrumen instrumen tersebut harus tidak melebihi harga rating yang
ada pada nameplate motor.
2. PENYINKRONAN SEMIOTOMATIS YANG BERWAKTU
Suatu motor sinkron dapat dibawa hingga kecepatan sinkronnya
dengan menggunakan relay
waktu definit untuk mengeksitasi relay pewaktuan medan. Metode
ini ditunjukkan pada
gambar 4.2
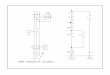
Gambar 4.2 Diagram elementer dari suatu instalasi
penyinkronan
semi otomatis berwaktu
Relay pewaktuan TR di-energized oleh koil pengasut utama M.
Kontak N.O. interlock M
yang instantaneous kemudian menutup. Baik kontak M dan koil
kontaktor dc F harus
menunggu menutupnya kontak delay-in-closing TR. Setelah suatu
periode waktu tertentu,
rotor harus berakselerasi sampai pada kecepatan maksimum yang
memungkinkan pada tahap
ini. Kontak TR kemudian menutup untuk mengakselerasi rotor
hingga ia mencapai
kesinkronan. Pengaturan pewaktuan harus disesuaikan terhadap
waktu maksimum yang
diperlukan untuk mengakselerasi motor sampai ke titik dimana ia
dapat mencapai kecepatan
sinkronnya setelah kontak TR menutup.
Usaha untuk menyinkronkan motor ini mungkin tidak berhasil
dengan baik. Maka perlu
untuk menekan tombol STOP ada mengulang siklus pengasutan.
Tidaklah harus untuk
-
membuat rotor diam sama sekali; cukup siklus pewaktuannya saja
yang diaktifkan ulang.
Baik cara ini maupun cara yang dipaparkan pada bagian 1 tidaklah
dijamin efektif pada tiap
percobaan untuk menyinkronkan motor.
3. PENGASUT MOTOR SINKRON DENGAN RELAY FREKUENSI MEDAN
TERPOLARISASI
Suatu relay frekuensi medan terpolarisasi dapat digunakan untuk
aplikasi otomatis dari
eksitasi medan untuk motor sinkron. Terdapat dua metode dasar
pengasutan motor
sinkron. Pada metode yang pertama, tegangan penuh diterapkan
pada lilitan stator, dan
pada metode yang kedua, pengurangan tegangan pengasutan.
PERALATAN KONTROL ROTOR
Kontaktor Medan
Kontaktor medan membuka kedua saluran yang menuju ke sumber
eksitasi. Selama
pengasutan, kontaktor tersebut juga menyediakan suatu rangkaian
medan yang tertutup
yang melalui suatu tahanan pelepasan. Suatu kontaktor medan yang
dioperasikan oleh
solenoida, bentuknya sangat mirip dengan kontaktor dc standar.
Bagaimanapun juga,
untuk kontaktor yang dioperasikan oleh solenoida, kutub
tengahnya biasanya tertutup dan
dirancang untuk memberikan suatu overlap positif antara kontak
normally closed dan dua
kontak normally open. Overlap ini merupakan suatu fitur yang
penting, karena lilitan
medan harus terbuka secepatnya. Lilitan medan dari motor harus
selalu terhubung singkat
melalui tahanan pelepasan atau terhubung dengan saluran dc. Koil
daripada kontaktor
medan dioperasikan dari sumber dc yang sama yang mana
menyediakan eksitasi untuk
medan motor sinkron.
Relay Out-of-Step
Untuk melindungi lilitan pengasutan, sebuah relay
Out-of-Step(OSR) digunakan pada
pengasut sinkron. Jika motor tidak berakselerasi dan mencapai
titik sinkron setelah waktu
tunda tertentu (atau kembali ke keadaan sinkron setelah lepas
darinya), dan jika jumlah
arus yang diinduksikan di lilitan medan melebihi suatu harga
yang telah ditentukan oleh
setting inti dari OSR, maka kontak normally closed daripada
relay itu akan membuka
untuk men-deenergize-kan kontaktor jala jala. Hasilnya, daya
dilepaskan dari rangkaian stator sebelum motor mengalami panas yang
berlebihan.
Relay Frekuensi Medan Terpolarisasi
Proses pengasutan suatu motor sinkron hanyalah akselerasi motor
hingga kecepatan yang
setingginya dari lilitan sangkar dan kemudian penggunaan
eksitasi medan. Komponen
yang bertugas dalam pemberian dan pelepasan eksitasi medan
secara baik dan bebas
adalah reaktor dan relay frekuensi medan terpolarisasi
-
Operasi dari relay frekuensi ditunjukkan pada gambar 4.3. Inti
magnetis dari relay
memiliki sebuah koil arus searah C, sebuah koil arus medan
induksi B, dan sebuah
jangkar yang berputar dimana kontak S terpasang. Koil C
terhubung ke sumber eksitasi
dc, menghasilkan suatu fluks magnetik konstan pada inti relay.
Fluks ini menyebabkan
relay terpolarisasi. Penumpukan pada fluks magnetik ini di inti
relay adalah fluks
magnetik yang dihasilkan arus induksi bolak balik yang mengalir
melalui koil B. Fluks yang melalui jangkar A bergantung pada fluks
yang dihasilkan oleh koil B dan C. Koil B
menghasilkan suatu fluks bolak balik yang besar sisi negatif dan
positif pada tiap setengah siklusnya. Dengan demikian, fluks
gabungan yang mengalir melalui jangkar A
lebih besar ketika fluks dari koil B berlawanan dengan yang dari
koil C. Pada gambar 4.3
A, fluks dari koil B melawan fluks dari koil dc C, yang
menyebabkan suatu fluks resultan
yang kuat dipaksa melalui jangkar A daripada relay. Kondisi ini
ditunjukkan pada loop loop yang berbayang dari gambar 4.3 C.
Setengah siklus kemudian, fluks yang dihasilkan
oleh koil B berbalik dan sedikit fluks yang mengalir melalui
jangkar A. Hal ini
dikarenakan oleh fakta bahwa fluks dari koil B tidak memaksa
lagi seperti halnya fluks
dari koil C untuk mengambil jalur yang lebih panjang melalui
jangkar A. Fluks
resultannya adalah lemah dan digambarkan oleh loop kecil
berbayang pada bagian atas
dari gambar 4.3 C. Jangkar relay membuka hanya jika terdapat
rentang arus medan
induksi yang digambarkan oleh loop bagian atas dari fluks
jangkar relay.
Gambar 4.3 Operasi dari relay frekuensi medan yang
terpolarisasi
Seiring motor mencapai kecepatan sinkronnya, arus medan induksi
pada koil relay B
amplitudanya mengecil, sebuah nilai fluks jangkar relay (loop
berbayang bagian atas)
dicapai dimana jangkar relay A tidak lagi tertutup. Relay
tersebut kemudian membuka
untuk mengaktifkan kontak S yang mana mengijinkan eksitasi dc
untuk diterapkan pada
titik yang mana ada pada gelombang arus medan yang terinduksi,
gambar 4.3 C.
-
Eksitasi sendiri diterapkan pada arah yang ditunjukkan oleh
tanda panah. Eksitasi
tersebut berlawanan , dalam hal polaritas, dengan arus medan
yang terinduksi pada saat
penggunannya. Prosedur ini diperlukan untuk mengkompensasi bagi
waktu yang
diperlukan unutk menghasilkan eksitasi. Interval waktunya
dihasilkan akibat dari inersia
magnetik daripada lilitan medan motor. Dikarenakan inersia
tersebut, eksitasi dc tidak
efektif hingga arus induksi berbalik (titik O pada gelombang) ke
polaritas yang sama
dengan arus searah. Eksitasi tersebut terus terbentuk hingga
motor sinkron seperti yang
ditunjukkan oleh titik M pada kurva.
Gambar 4.4 Operasi dan pengkawatan suatu relay frekuensi medan
terpolarisasi
Gambar 4.4 menunjukkan operasi normal dari relay frekuensi.
Eksitasi dc diterapkan
pada koil relay pada saat motor sinkron diasut. Ketika lilitan
stator energized
menggunakan metode tegangan penuh atau pereduksian tegangan,
maka arus jala jala diijinkan untuk mengalir melalui ketiga relay
beban lebih dan lilitan stator. Hasilnya, arus
frekuensi saluran terinduksi pada 2 rangkaian rotor yang tidak
terikat secara elektrik;
lilitan pengasutan atau sangkar, dan lilitan medan. Arus yang
terinduksi pada lilitan
medan mengalir melalui reaktor yang kemudian memparalelkan
sebagian dari rangkaian
itu melalui koil ac relay frekuensi. Koil relay out-of-step,
tahanan pelepasan medan, dan
akhirnya menuju kontak normally closed dari kontaktor medan.
Fluks yang dihasilkan
pada inti relay frekuensi menarik jangkar melawan spacer
(pengatur jarak) dan membuka
kontak kontak relay yang normally closed, pada gambar 4.4.
seiring motor berakselerasi ke kecepatan sinkronnya, frekuensi dari
arus induksi di lilitan medan
berkurang. Bagaimanapun juga terdapat fluks magnetik yang
memadai pada inti relay
untuk menmpertahankan jangkar terhadap inti. Fluks ini
disebabkan oleh impedansi
-
reaktor yang pada frekuensi slip yang tinggi memaksa sejumlah
arus induksi melalui koil
ac relay frekuensi.
Pada titik dimana motor mencapai kecepatan sinkronya, biasanya
92 sampai 97 % dari
kecepatan sinkronnya, frekuensi dari arus medan induksi berada
pada harga yang rendah
sekali. Impedansi reaktor juga dikurangi secara besar pada
frekuensi rendah ini. Hasilnya,
jumlah arus yang terparalel (shunted) ke koil ac dikurangi
hingga titik dimana fluks inti
resultan tidak kuat lagi menahan jangkar terhadap spacer. Pada
saat yang tepat dimana
frekuensi dan kecepatan rotor serta polaritas arus induksi
sesuai untuk penyinkronan,
maka jangkar dilepas, kontak kontak relay menutupdan rangkaian
kontrol tergenapi untuk mengoperasikan koil kontaktor medan. Dengan
demikian, eksitasi dc diterapkan
kepada lilitan medan motor, gambar 4.4 B. Pada saat yang
bersamaan, relay out-of-step
dan tahanan pelepasan deenergized yang disebabkan oleh kontak
kontak normaly closed kontaktor medan.
Suatu fluktuasi tegangan dapat menyebabkan motor lepas dari
kesinkronan. Pada keadaan
ini, arus frekuensi slip terinduksi pada lilitan medan. Sebagian
dari arus ini mengalir
melalui koil ac dari relay frekuensi medan terpolarisasi,
membuka kontak relay, dan
menghilangkan eksitasi medan dc. Jika keadaan beban dan tegangan
jala jala kembali normal dalam suatu interval waktu tertentu, dan
motor telah memiliki torsi tarik (pull-in),
maka kemudian motor secara otomatis sinkron kembali.
Bagaimanapun juga, jika
keadaan beban lebih dan tegangan yang rendah berlanjut sehingga
motor tak dapat
sinkron ulang, maka relay out-of-step atau relay beban lebih
bekerja untuk melindungi
motor dari overheating.
-
Gambar 4.5 Diagram garis untuk operasi otomatis motor sinkron
yang menggunakan
relay frekuensi medan terpolarisasi
Pada gambar 4.5, suatu diagram garis diperlihatkan untuk operasi
otomatis dari suatu
motor sinkron. Untuk pengasutan, lilitan medan motor dihubung
singkat melalui kontak
daya normally closed daripada kontaktor medan F, tahanan
pelepasan, koil relay out-of-
step, dan reaktor. Ketika tombol start ditekan, rangkaian
tergenapi ke kontaktor pilot
(CR1) melalui sekering kontrol, tombol STOP dan kontak kontak
dari relay out-of-step dan overload. Menutupnya CR1 mengenergize
kontaktor saluran M yang mana
menerapkan tegangan penuh pada terminal motor dengan relay
overload pada rangkaian.
Suatu kontak normally open pada CR1 dan suatu interlock yang
normally open pada
kontaktor jala jala menyediakan rangkaian penahan (hold-in).
Suatu ammeter, yang disediakan oleh trafo arus, memperlihatkan arus
starting dan running yang ditarik oleh
motor.
-
Pada saat motor mengasut, relay frekuensi medan terpolarisasi
membuka kontak normall
closed-nya dan mempertahankan suatu rangkaian yang terbuka
menuju kontaktor medan
F hingga motor berakselerasi ke kecepatan yang sesuai untuk
penyinkronan. Ketika
motor mencapai kecepatan sebesar 92 sampai 97 % dari kecepatan
sinkronnya, dan ketika
rotor berada pada posisi yang tepat, maka kontak dari pada relay
frekuensi medan
terpolarisasi menutup untuk mengenergize kontaktor medan F
melalui suatu kontaktor
saluran (M). Penutupan kontaktor medan F menyebabkan
diterapkannya eksitasi dc pada
lilitan medan dan menyebabkan motor menjadi sinkron. Setelah
rangkaian medan
terbentuk, melalui kontak kontak daya yang normally open dari
kontaktor medan, maka kontak normally closed dari kontaktor ini
membuka rangkaian pelepasan. Motor kini
bekerja pada kecepatan sinkron. Jika tombol stop ditekan ataupun
jika relay beba n lebih
magnetik mengalami trip, maka pengasut tersebut deenergized dan
memutuskan motor
dari jala jala.