Embed Size (px)
Citation preview

-----------------------------------------------------
ROBOT CÔNG NGHIỆP Trường ĐHCN Hà Nôi
-----------------------------------------------------
Sinh viên thực hiện : Nguyễn Văn Khiêm

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
LỜI MỞ ĐẦU
Vào đầu thập kỷ trước, ý tưởng đầu tiên về robot xuất hiện, thể hiện ước mơ cháy bỏng của con người là tạo ra những người máy có thể thay thế mình trong những công việc nặng nhọc, nhàm chán nguy hiểm. Vào khoảng năm 1940, mẫu robot đầu tiên ra đời tại phòng thí nghiệm quốc gia Oak Ridge và Argonne của Mỹ, để vận chuyển các hoạt chất phóng xạ. Đến thập kỷ 80 trên thế giới đó có tới 40 nghìn robot thuộc 500 kiểu do 200 hãng tham gia sản xuất. Ngày nay robot đã được sử dụng rộng rãi trong sản xuất nghiên cứu khoa học và đời sống. Đó là các thiết bị không thể thiếu được trên các hệ thống sản xuất, đặc biệt là các hệ thống sản xuất linh hoạt. Robot ngày càng khéo léo và thông minh, được coi là sản phẩm điển hình của 1 số ngành kỹ thuật.
Cho đến nay, hầu hết các trường đại học kỹ thuật ở Việt Nam đó
đưa môn kỹ thuật robot vào chương trình chính khóa. Môn học này chủ yếu được giảng dạy cho chủ yếu cho các chuyên ngành cơ khí, song khía cạnh riêng biệt của nó như kỹ thuật điều khiển, lập trình, mô phỏng cũng được các ngành khác rất quan tâm. Ngày 12-10-2003 đó xảy ra một sự kiện, đánh dấu mốc phát triển mới trong lĩnh vực nghiên cứu, đào tạo và ứng dụng khoa học vào công nghệ robot tại Việt Nam: Hội khoa học Công nghệ robot Việt Nam được thành lập. Sự ra đời của hội phản ánh nhu cầu cấp thiết của công nghiệp, quốc phòng và cuộc sống, đáp ứng được sự mong mỏi của đông đảo các nhà khoa học, các nhà sản xuất, các giáo sư, các nhà nghiên cứu sinh, sinh viên tại các trường đại học và tất cả những ai quan tâm đến robot. Kuka là một loại robot đang được sử dụng rất rộng rãi, với công suất lớn. Ngay sau đây chúng tôi sẽ đưa ra những hiểu biết cơ bản về robot Kuka. Trong quá trình tìm hiểu và làm bài có nhiều thiếu sót rất mong được sự đóng góp và thông cảm của quý thầy cô và các bạn. Xin trân thành cảm ơn!

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
2
PHẦN I: GIỚI THIỆU SƠ BỘ VỀ ROBOT KUKA KR 1000
Ngay từ khi mới ra đời Kuka đó được củng cố chủ quyền với những sáng tạo rất năng động trong lĩnh vực robot. Điển hình kr kuka 1000 là một nhà vô địch mới trong các lớp học của robot nặng. Mạnh mẽ và năng động, các KR kuka 1000 luôn xử lý an toàn và chính xác với những thành phần nặng nhất. Năng lực tải trọng của nó là 1.000 kg - mức cao nhất của robot cụng nghiệp, với một chuỗi động học mở, với một tiếp cận ngang rất lớn là 3.200 mm và và vươn cao tới 5.000 mm. Nú giúp loại bỏ sự cần thiết cho các trạm thang máy, thiết bị nâng hạ khác. Thiết kế của nó hoàn toàn mới cho phép tốc độ và sức nâng rất lớn mà đối với những loại robot trước đây chỉ là mơ ước: thời gian chu kỳ đạt tới mức tối thiểu, tải trọng tối đa và rất linh hoạt.
1. Kuka kr 1000 cú những lợi thế vụ tận với các tính năng sau:
Mạnh hơn bất kỳ robot nào: Tải trọng 1.000 kg, năng lực tải trọng cao nhất của tất cả các robot 6 trục với một chuỗi động học mở.
Nhanh hơn: Vận tốc cao làm việc do FEM và tối ưu hóa trọng lượng, động cơ AC năng động và nhanh chóng thích nghi với điều kiện môi trường. không gian làm việc: bề ngang là 3.200 mm và chiều cao từ 5.000 mm mở ra các ứng dụng mới rất linh hoạt trong sản xuất.
An toàn hơn: Kuka luôn giữ an toàn để bảo vệ máy tính dựa trên phần mềm và an toàn khi vận hành.
Chính xác hơn: Sai số do thiết kế robot tối ưu. Nhiều phũng để cơ động: Không có hạn chế chuyển động trục
phạm vi do năng lượng tích hợp và hệ thống cấp nước.
Bảo dưỡng thấp hơn: Quỏ tải, bảo vệ, động cơ brushless AC servo được sử dụng trong robot, các trục chính được bôi trơn.
Độ bền cao: Kuka có thể làm việc nơi mà người khác không thể làm việc với nhiệt độ cao như các xưởng đúc, các lò cán thép, độ chịu nhiệt và chịu mài món cực tốt không những thế Kuka 1000 có thể đề

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
3
kháng với cả 2 loại axit và kiềm . 2. Kuka kr 1000 là robot đi tiên phong
Khi bạn lựa chọn robot kuka, bạn có thể chắc chắn rằng bạn đang có sự lựa chọn đúng đắn cho mọi lĩnh vực ứng dụng mà bạn chọn, Kuka là một loại robot tối ưu. Nhờ chính năng lực của chúng ta trong phát triển và sản xuất cộng thêm sự chuyên môn của các nhà thiết kế trong các bộ điều khiển và phần mềm, Kuka cung cấp cho bạn các tính năng không chỉ hiện nay mà sẽ vẫn còn được chứng minh hiệu quả của chúng trên thế giới trong tương lai. Kuka kr điều khiển dựa trên Windows kuka C2, chính vì vậy bạn được hưởng lợi từ công nghệ đó được chứng minh dịch vụ hàng ngàn lần, nên sẽ đơn giản hóa việc cài đặt, và lập trình các robot của bạn. 3. Thông số kỹ thuật cơ bản của Kuka Kr 1000
Góc quay tối đa bề ngang là 300o

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
4
Đặc điểm kỹ thuật ROBOT KR KUKA 1000

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
5
Tải trọng 1000kg Tải trọng bổ sung 50kg Tầm với phương ngang 3200mm Tầm với phương dọc 5000mm Số trục 6 trục Sai số ±0.1mm Trọng lượng 4690kg Vị trí gắn Sàn phẳng Bộ điều khiển Kr C2 Nhiệt độ hoạt động an toàn +10oC đến +50oC (283K đến 323K)
Tốc độ chuyển động
J1(58 o/s (1.01 rad/s) J2, J3 (50 o/s (0.87 rad/s) J4, J5 (60 o/s (1.05 rad/s) J6 (84 o/s (1.47 rad/s)
Giới hạn chuyển động
J1 = ±150o J2 = +175o, -130o
J3 = +145o, -110o J4 = ±350o J5 = ±118o J6 = ±350o
4. Các ứng dụng của robot Kr kuka và tiềm năng tại thị trường Việt Nam:
Robot kr Kura cú rất nhiều ứng dụng trong nền công nghiệp hiện đại, nó được sử dụng trên nhiều lĩnh vực khác nhau.
Ví dụ: Được sử dụng trong công nghiệp ô tô ,công nghiệp chế tạo kính……
- Ở Việt Nam robot kr kura đã bắt đầu được ứng dụng nhiều, ví dụ ở cụng ty Toyota Việt Nam,Yamaha…
- Ở Việt Nam có một số công ty bán sản phẩm này: CÔNG TY TNHH SẢN XUẤT VÀ THƯƠNG MẠI W.I.N Địa chỉ: Vĩnh Thịnh, Đại Áng, Thanh Trì, Hà Nội…..
PHẦN 2: PHƯƠNG TRÌNH ĐỘNG HỌC CHO KHÂU CÔNG TÁC CỦA ROBOT

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
6
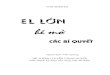
1. Mô hình và bảng thông số động học Denavit – Hatenberg.
Khâu di θi ai αi
1 l0 θ0* a0 90o
2 0 θ1* a2 0
3 0 θ2* 0 -90o
4 l4 θ3* 0 90o
5 0 θ4* 0 90o
6 l6 θ5* 0 0

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
7
x0
z0
x1
x3
x2
x4
x5
z1
z2
z3
z4
z5
x6 6l
a
a
l
l
Robot KR 1000 và các hệ tọa độ 2. Giải bài toán động học thuận robot: Ma trận mô tả hướng và vị trí khâu thứ i so với khâu thứ i-1:
,.,.,., 111*
11 iiiii
i xRotaxTranszRotdzTransT

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
8
10000cossin00sincos00001
.
100001000010
001
.
1000010000cossin00sincos
.
1000100
00100001
1ii
ii
i
ii
ii
i
ii
a
dT
1000cossin0
sin.sin.coscos.cossincos.sin.sincos.sincos
1iii
iiiiiii
iiiiiii
ii d
aa
T
Ta có các ma trận biến đổi thuần nhất giữa các hệ trục tọa độ theo D – H:
1000010
sincos0sincossin0cos
0
*00
*0
*0
*00
*0
*0
1
0 laa
T OO
10000100
sin0cossincos0sincos
*12
*1
*1
*12
*1
*1
2
1
ll
T OO
100000100cos0sin0sin0cos
2
*2
3
2
OOT

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
9
1000010
0cos0sin0sin0cos
4
3
4
3 lT O
O
100000100cos0sin0sin0cos
4
4
5
4
OOT
1000100
00cossin00sincos
6
5
5
6
5 lT O
O
Phương trình động học của khâu công tác:
6
5
5
4
4
3
3
2
2
1
1
0
6
0..... O
OOO
OO
OO
OO
OO
OO TTTTTTT
Để đơn giản khi viết phương trình động học, ta quy ước các hàm lượng giác như sau:
5,0
i
SinSCosC
ii
ii
Thực hiện tính toán ma trận trên phần mềm Matlab như sau: Syms C0 C1 C2 C3 C4 C5; Syms S0 S1 S2 S3 S4 S5; Syms l0 a0 a2 l4 l6;

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
10
5*4*3*2*1*061000;6100;0055;005551000;0010;0404;040441000;4010;0303;03033
1000;0010;0202;020221000;0100;1*2011;1*20111
1000;0010;0*0000;0*00000
TTTTTTTlCSSCT
CSSCTlCSSCT
CSSCTSaCSCaSCT
lSaCSCaSCT
T6 = [((C1*C2-S1*S2)*C3*C4+(-C1*S2-S1*C2)*S4)*C5+(C1*C2-S1*S2)*S3*S5, -((C1*C2-S1*S2)*C3*C4+(-C1*S2-S1*C2)*S4)*S5+(C1*C2-S1*S2)*S3*C5, (C1*C2-S1*S2)*C3*S4-(-C1*S2-S1*C2)*C4, ((C1*C2-S1*S2)*C3*S4-(-C1*S2-S1*C2)*C4)*l6+(-C1*S2-S1*C2)*l4+a2*C1] [((S1*C2+C1*S2)*C3*C4+(C1*C2-S1*S2)*S4)*C5+(S1*C2+C1*S2)*S3*S5, -((S1*C2+C1*S2)*C3*C4+(C1*C2-S1*S2)*S4)*S5+(S1*C2+C1*S2)*S3*C5, (S1*C2+C1*S2)*C3*S4-(C1*C2-S1*S2)*C4, ((S1*C2+C1*S2)*C3*S4-(C1*C2-S1*S2)*C4)*l6+(C1*C2-S1*S2)*l4+a2*S1] [-S4*C4*C5+C3*S5, S4*C4*S5+C3*C5, -S4^2, -S4^2*l6] [0, 0, 0, 1] Thay số cụ thể: a0 = 600; l0 = 1100; a2 = 1400; l4 = 1200; l6 =0.
T6 mô tả hướng và vị trí của khâu chấp hành cuối:

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
11
Ta được hệ thống các phương trình động học của khâu công tác như sau:
nx = ((C1*C2-S1*S2)*C3*C4+(-C1*S2-S1*C2)*S4)*C5+(C1*C2-S1*S2)*S3*S5. ny = ((S1*C2+C1*S2)*C3*C4+(C1*C2- S1*S2)*S4)*C5+(S1*C2+C1*S2)*S3*S5 nz = -S4*C4*C5+C3*S5 Ox = -((C1*C2-S1*S2)*C3*C4+(-C1*S2-S1*C2)*S4)*S5+(C1*C2-S1*S2)*S3*C5 Oy = -((S1*C2+C1*S2)*C3*C4+(C1*C2-S1*S2)*S4)*S5+(S1*C2+C1*S2)*S3*C5 Oz = S4*C4*S5+C3*C5 ax = (C1*C2-S1*S2)*C3*S4-(-C1*S2-S1*C2)*C4 ay = (S1*C2+C1*S2)*C3*S4-(C1*C2-S1*S2)*C4

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
12
az = -S4^2 px = ((C1*C2-S1*S2)*C3*S4-(-C1*S2-S1*C2)*C4)*l6+(-C1*S2-S1*C2)*l4+a2*C1 pY = ((S1*C2+C1*S2)*C3*S4-(C1*C2-S1*S2)*C4)*l6+(C1*C2-S1*S2)*l4+a2*S1 pz = -S4^2*l6

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
13
PHẦN 3: ROBOT CÓ MỘT KHỚP QUAY VÀ HAI KHỚP TỊNH TIẾN
Đề số 14 Câu 3: Viết phương trình động học robot Giải bài toán động học
1 10
2 20
3 30
1 2 3
0.1sin0.3sin0.6sin
, , ?
( )
( )
( )
, , ?
p p p
p p
p p
p p
q q tq q tq q t
x y zx x ty y tz z t
q q q
Xác định quy luật chuyển động, vân tốc và gia tốc biến khớp q1? Biết: q1(0) = 50; q1(2) = 150; q1(4) = 450; q1(5) = 750; gia tốc liên tục tại các điểm chốt. Vẽ các biểu đồ vị trí, vận tốc, gia tốc biến khớp q1?
I. Phương trình động học:

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
14

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
15
Bảng thông số động học D – H:
Khâu di θi ai αi 1 d2
* θ1* 0 0
2 l2 -90o a3 -90o
3 d3* 0 0 0
Các ma trận biến đổi thuần nhất theo D – H:
1000100
00cossin00sincos
2
11
11
2
1 dT O
O
;
1000010001
0100
2
33
2 la
T OO
1000100
00100001
3
4
3 dT O
O
Phương trình động học của robot:
1000010
*cos*sinsin0cos*sin*coscos0sin
..
22
313111
313111
4
1
4
3
3
2
2
1
4
1
dladad
T
TTTT
OO
OO
OO
OO
OO
Nhìn vào ma trận phương trình động học của robot ta thấy vị trí của khâu công tác:
22
3131
3131
*cos*sin*sin*cos
dlzadyadx
p
p
p

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
16
Thay các giá trị
tqqtqqtqq
sin6.0sin3.0sin1.0
303
202
101
Ta được
tqlzatqtqtqyatqtqtqx
p
p
p
sin3.0*sin1.0cossin6.0*sin1.0sin
*sin1.0sinsin6.0*sin1.0cos
202
3103010
3103010
II. BÀI TOÁN ĐỘNG HỌC NGƯỢC: 22
3131
3131
*cos*sin*sin*cos
dltzadtyadtx
p
p
p
21
Ta có: Lượng tịnh tiến 22 ltzd p Bình phương 2 vế của (1) và (2) rồi cộng vào ta tìm được
lượng tịnh tiến 23
223 atytxd pp
Từ (1) rút 1sin thay vào (2) ta có:
323
221
323
221
arccos
cos
aatytx
tytx
aatytx
tytx
pp
pp
pp
pp
\
III. QUY LUẬT CHUYỂN ĐỘNG CỦA KHÂU 1 Ta có: quy luật chuyển động của khớp 1 có dạng sau:

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
17
231
122
31
012
23
31
26
23
atat
atatat
atatatat
Tại các thời điểm đã cho: q1(0) = 50; q1(2) = 150; q1(4) = 450; q1(5) = 750 Ta có hệ phương trình sau:
2121
45
1452510416524
5
3
2
1
0
123
123
123
0
aa
aa
aaaaaaaaa
a
Vậy quy luật chuyển động của khâu 1 là:
5421
21 23
1 tttt
Và vận tốc và gia tốc:
13
423
1
21
tt
ttt
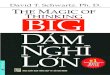
*) Đồ thị hàm số:

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
18
a. Đồ thị hàm số của: 5421
21 23
1 tttt
b. Đồ thị hàm số của vận tốc: 423 2
1
ttt

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
19

TRƯỜNG ĐHCN HÀ NỘI ROBOT CÔNG NGHIỆP
SVTH: NGUYỄN VĂN KHIÊM GVHD: KHỔNG MINH
20
c. Đồ thị hàm số gia tốc: 131
tt