Embed Size (px)
Citation preview

Bài t p l n ậ ớ Lọc hóa dầu -K53 Đặng văn tùng
Bài Tập Lớn
Đề bài
câu 1: giới thiệu về đo lường và điều khiển
câu2: phân loại van và bơm
Câu 2:Phân loại van và bơm
A. Phân loại van:a) Dựa theo thiết kế và kiểu chuyển động của chốt van như sau:+)Van cầu:Chốt trượt có đầu hình cầu hoặc hình nón,chuyển động lên xuống+)Van nút:Chốt xoay hình trụ (có đục các lỗ theo chiều ngang) hoặc một phần hình trụ.+)Van bi:Chốt xoay hình cầu (có đục các lỗ theo chiều ngang) hoặc một phần hình cầu.+)Van bướm:Chốt xoay hình đĩa. Phân lại van dựa theo cơ chế truyền động như:+)Van khí nén:Loại phổ biến nhất,truyền động khí nén sử dụng màng chắn lò so hoặc pittong.Tín hiệu đầu vào có thể là khí nén,dòng điện hoặc tín hiệu.Nếu tín hiệu điều khiển là dòng điện,ta cần bộ chuyển đổi dòng điện-khí nén(I/P) tích hợp bên trong hoặc tách riêng bên ngoài+)Van điện:cơ chế chấp hành sử dụng động cơ servo hoặc động cơ bước,được điều khiển trực tiếp từ tín hiệu đầu ra của bộ điều khiển,thông thường là dòng điện tương tự 4-20mA hoặc tín hiệu số.+)Van thủy lực:Cơ chế chấp hành sử dụng hệ thống bơm dầu kết hợp màng chắn hoặc pittong,bơm dầu được điều khiển bởi tín hiệu ra từ bộ điều khiển. +)Van từ:Cơ chế chấp hành sử dụng hệ thống bơm dầu kết hợp lò xo. b)Ứng dụng+)Van điện: được sử dụng trong những ứng dụng công suất nhỏ đòi hỏi độ chính xác cao.+)Van thủy lực: được sử dụng cho các ứng dụng công suất lớn.+)Van từ: lực nén yếu và độ chính xác kém,chỉ phù hợp với các bài toán đơn giản
2 GIỚI THIẸU MỘT SỐ LOẠI VAN
2.1 Van chặn
Van chặn là van dùng để đóng mở, chặn dòng nhiên liệu trên đường ống và điều chỉnh mức độ dòng chảy
trong ống. Van chặn là loại van được sử dụng nhiều nhất do cấu tạo đơn giản, dễ chế tạo và vận hành, sửa chữa.
Trong thực tế thường sử dụng 2 loại van chặn là:
- Van chặn hình nêm tay quay

Vỏ
Ê cu
Bích van
Đĩa van
- Van chặn hình đĩa phẳng
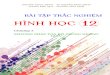
2.1.1 Van chặn hình nêm tay quay
a. Cấu tạo
Trên hình II.3.1 là cấu tạo một loại van chặn hình nêm tay quay. Cấu tạo của loại van này gồm các bộ phận
chính là:
- Vỏ van: Vỏ van thường được làm bằng gang.
- Bích van.
- Vô lăng van: thường được đúc bằng thép.
- Êcu van: thường được đúc bằng đồng.
- Ti van: được đúc bằng thép.
- Đĩa van hình nêm: có rãnh chữ T để nối với ti van đĩa van, đĩa van được làm bằng thép và trên bề mặt đĩa thường
được mạ đồng.
b. Nguyên lý làm việc
Quay tay quay vô lăng van làm ti van quay ăn khớp với êcu cố định trên vỏ van làm tịnh tiến lên xuống ti
van kéo theo đĩa van lên xuống để đóng, mở van.
c. Đặc tính kỹ thuật
Van này là loại van điều chỉnh được lưu lượng phụ thuộc vào chiều cao đóng mở van tuy nhiên hay bị dò
rỉ, nặng, đắt và gia công khó.
Hình II.3.1:Van chặn hình nêm tay quay

Van 1 chiều
Đĩa Van
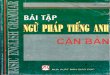
2.1.2 Van chặn hình đĩa phẳng (van kim)
a. Cấu tạo
Vỏ van có 2 ngăn, ngăn cách đóng kín bằng đĩa van hình phẳng (dạng như sup pap). Trên hình II.3.2 là cấu
tạo một loại van chặn hình đĩa phẳng.
b. Nguyên lý làm việc
Quay vôlăng van nhờ êcu cố định trên vỏ van làm ti van lên xuống kéo theo sự định tiến của đĩa van sẽ
đóng mở van.
c. Đặc tính kỹ thuật
Là loại van không điều chỉnh được (rất ít điều chỉnh) lưu lượng van ít phụ thuộc vào chiều cao đóng mở
van.
2.2 Van 1 chiều
Van 1 chiều là loại van chỉ cho nhiên liệu đi theo 1 chiều nhất định và tự động đóng lại khi nhiên liệu
đi ngược lại. Van 1 chiều có 2 loại: kiểu nâng và kiểu thẳng đứng.
2.2.1 Kiểu nâng
- Cấu tạo:
+ Bích van
+ Vỏ van
+ Ống dẫn hướng
+ Sup páp đĩa van.
- Nguyên lý làm việc:
Dòng chảy nhiên liệu đi từ trái qua phải đẩy suppap trượt dọc ống dẫn hướng lên cho nhiên liệu lỏng chảy
qua và sẽ tự động đóng lại khi nhiên liệu chảy ngược lại.
2.2.2 Kiểu thẳng đứng (elape)
- Cấu tạo:
+ Bích van.
+ Vỏ van.
Hình II.3.2
Van chặn hình đĩa phẳng

Lưới kim loạiSupap dương
Lưới Bình ngăn tia lửa
Supap âm
Nắp đậy
+ Đĩa van kiểu thẳng đứng có chốt trục làm bản lề.
- Nguyên lý làm việc:
Khi nhiên liệu chảy từ trái qua phải sẽ làm đĩa van quay quanh trục bản lề làm mở van, nếu nhiên liệu chảy
ngược lại van sẽ tự động đóng.
Chú ý: van 1 chiều thường lắp ở ống đẩy của máy bơm và có tác dụng ổn áp dòng chảy trong đường ống,
không cho nhiên liệu chảy ngược trở lại gây xung lực cho máy.
2.3 Van an toàn
a. Cấu tạo:
- Vỏ van.
- Cửa vào cửa ra.
- Lò xo súp páp.
b. Nguyên lý làm việc:
Điều chỉnh vít nén lò xo súp áp đến áp suất làm việc
của van khi đó lò so bị nén lại, súp sẽ tự động mở ra và đưa nhiên liệu qua cửa đẩy
khi áp suất dòng nhiên liệu tăng quá áp suất làm việc của van.
Chú ý: - Van an toàn thường lắp ở ống đẩy của máy bơm, trên tuyến tiếp với van an toàn thường lắp thêm
ống hồi lưu để đưa nhiên liệu về ống hút hoặc với bể chứa dầu khi có sự cố.
- Van an toàn thường dùng áp suất làm việc khoảng 16 kG/cm2.
2.4 Van hô hấp
Van hô hấp thường lắp ở trên mái bể chứa dầu nhằm tự động đóng mở van khi xuất nhập nhiên liệu vào bể,
trong quá trình tồn chứa nhằm đảm bảo an toàn cho bể.
a. Cấu tạo
- Bộ ngăn tia lửa.
- Súp páp hút, đẩy.
- Đối trọng.
b. Nguyên lý làm việc:
-Thở ra: Khi nhập nhiên liệu vào
bể, áp suất trong bể lớn hơn áp
suất ngoài trời vì thế sẽ tạo một
áp lực dồn lên qua lỗ ngăn tia lửa đẩy đĩa súp páp ngoài mở ra (thở tự động), khi ngừng nhập hoặc bể có áp suất
cân bằng với áp suất ngoài thì van tự động đóng súp áp lại.

- Hút vào: Khi xuất nhiên liệu đi, lúc đó trong bể vơi dầu sẽ tạo ra chân không, áp suất trong bể nhỏ hơn áp
suất ngoài trời. Không khí sẽ từ ngoài qua súp áp của van thở hút vào trong bể cho đến khi áp suất trong bể cân
bằng với bên ngoài thì đồng thời lúc đó súp áp van thở đóng lại.
- Bình ngăn tia lửa:
Tác dụng dùng để ngăn ngọn lửa từ bên ngoài vào trong bể. Cấu tạo của bình ngăn tia lửa gồm vỏ bằng
thép hình trụ và được cuộn lưới ngăn tia lửa và mái che mưa. Các mặt lưới có kích thước và chiều cao sao cho có
thể chia ngọn lửa thành nhiều tia nhỏ và dập tắt trong lưới.
2.5 Phương pháp hiệu chỉnh van an toàn và hô hấp
2.5.1 Hiệu chỉnh van an toàn
Lắp van an toàn vào bộ giá gồm có ống chữ T, có lắp áp kế và rắc co lắp ống mềm để nén khí hoặc nhiên liệu vào.
Căn cứ thông số áp kế hiển thị để điều chỉnh vít điều chỉnh nén lò xo đóng mở súp páp.
2.5.2 Van hô hấp
a. Thử áp lực dương: nhằm xác định số lượng đối trọng cho van an toàn.
Dùng ống bích riêng làm thành bộ, trên bộ gá đặt một áp kế, bắc ống mềm vào rắc co bộ gá, dùng bơm nén
khí vào van hô hấp, qua số chỉ của áp kế theo dõi sự tự mở của sup páp dương và quyết định thêm bớt đối trọng.
b. Thử áp lực âm tương tự như trên ta dùng thiết bị để rút khí ra khỏi van an toàn, căn cứ vào số chỉ của chân không kế
và sự làm việc của súp páp âm mà quyết định thêm bớt đối trọng.
2.6 Giới thiệu một số loại van thường dùng và cách lắp đặt van trên đường ống

B. Phân loại bơm:a) Dựa vào nguyên lý làm việc người ta chia bơm thành nhiều loại:
+) Bơm thể tích:Do bộ phận tịnh tiến hay quay của bơm làm thay đổi thể tích bên trong tạo nên áp suất âm ở đầu hút và ấp suất dương ở đầu đẩy,do đó thế năng và áp suất của chất lỏng khi qua bơm tăng lên.+) Bơm ly tâm:Nhờ lực ly tâm tạo ra trong chất lỏng khi guồng quay mà chất lỏng được hút vào và đẩy ra khỏi bơm.+) Bơm đặc biệt :Bao gồm các loại bơm không có bộ phận dẫn động như động cơ điện,máy hơi nước,mà dùng luồng khí hay hơi làm nguồn động lực để đẩy chất lỏng
I- Phaân loaïi maùy bôm
Maùy bôm coù theå phaân loaïi theo nhieàu caùch. Thoâng duïng nhaát laø phaân loaïi theo caáu taïo vaø nguyeân lyù laøm vieäc cuûa maùy bôm.
1. Bôm caùnh
Boä phaän laøm vieäc chính cuûa bôm laø baùnh xe coâng taùc coù caùc caùnh daãn doøng, noù laø boä phaän chuû yeáu ñeå trao ñoåi naêng löôïng vôùi chaát loûng.
Loaïi bôm naøy goàm: Bôm ly taâm, bôm höôùng truïc, bôm xoaùy.

2. Bôm theå tích
Vieäc trao ñoåi naêng löôïng vôùi chaát loûng ñöôïc tieán haønh theo nguyeân1yù neùn chaát loûng trong moät theå tích kín döôùi moät aùp suaát thuûy tónh.
Loaïi bôm naøy goàm: Bôm pit toâng, bôm truïc vít, bôm roâto caùnh tröôït.
3. Bôm phun tia
Loaïi bôm naøy khoâng coù chi tieát chuyeån ñoäng. Vieäc truyeàn naêng löôïng cho chaát loûng ñöôïc thöïc hieän nhôø moät doøng chaát loûng (hoaëc khí) khaùc coù naêng löôïng cao hôn.
4. Bôm khí eùp
Loaïi bôm naøy cuõng khoâng coù chi tieát chuyeån ñoäng. Bôm laøm vieäc döïa treân nguyeân taéc bình thoâng nhau.
5. Bôm nöôùc va
Lôïi duïng naêng löôïng nöôùc va ñeå vaän chuyeån chaát loûng.
6. Bôm chaân khoâng
Cuõng thuoäc loaïi bôm theå tích nhöng laøm vieäc theo nguyeân lyù thay ñoåi aùp suaát
Sau đây giới thiệu một số loại máy bơm dầu sáng thường dùngb) Lựa chọn bơm:
- Trong công nghiệp hóa chất và thực phẩm,loại bơm được dùng phổ biến nhất là bơm ly tâm,vì so với bơm pittông,bơm ly tâm có ưu điểm:+)Tạo được lưu lượng đều đặn đáp ứng yêu cầu về kỹ thuật của nhiều ngành sản xuất.Đồ thị cung cấp đều đặn,không tạo hình sin.+)Số vòng quay lớn,có thể truyền động trực tiếp từ động cơ điện.+)Có cấu tạo đơn giản,gọn,chiếm ít diện tích xây dựng và không cần kết cấu nền móng quá vững chắc.Do đó giá thành chế tạo,lắp đặt và vận hành thấp.+)Có thể dùng bơm nhừng chất lỏng bẩn,vì khe hở giữa cánh guồng và than bơm tương đối lớn,không có van là bộ phận dễ bị hư hỏng và tắc do bẩn gây ra.Nhờ cải tiến kết cấu cánh guồng mà bơm ly tâm hiện nay đã bơm được cả dung dịch huyền phù có nồng độ pha rắn cao.+)Có năng suất lớn và áp suất tương đối nhỏ lên phù hợp với yêu cầu của phần lớn các quá trình hóa học và thực phẩm.
- Tuy nhiên,bơm ly tâm cũng tồn tại nhiều nhược điểm cần được tiếp tục nghiên cứu cải tiến.Đặc trưng những nhược điểm này là:+)Hiệu suất thấp hơn bơm pittong từ 10-15%+)Khả năng tự hút kém,nên trước khi bơm phải mồi đầy chất lỏng cho bơm và ống hút,khi bơm đặt cao hơn bể chứa+)Nếu tăng áp suất thì năng suất giảm mạnh so với thiết kế,khi đó hiệu suất giảm theo
- Những ưu nhược điểm của bơm ly tâm đối với bơm pittong hoàn toàn ngược lại.vì vậy,có thể nêu chung một ưu nhược điểm của bơm pittong như sau:+)Bơm pittong được dùng trong trường hợp cần năng suất thấp,nhưng áp suất cao.+)Nếu thay động cơ điện bằng máy hơi nước thì bơm pittong được dùng để bơm các chất dễ cháy nổ rất an toàn.+)Dùng bơm pittong tiết kiệm hơn về năng lượng và vốn xây dựng,do có hiệu suất cao hơn bơm ly tâm.

- Ngoài ra đối với một số loại bơm khác chỉ được dùng trong những trường hợp đặc biệt,ví dụ:+)Bơm hướng trục được dùng khi lưu lượng lớn (khoảng 30m3/s),áp suất thấp (khoảng 10-15m).Nó có cấu tạo đơn giản,gọn và hiệu suất cao.+)Bơm răng khía thuận tiện khi bơm các chất lỏng có độ nhớt cao,không chứa các hạt rắn,khi cần áp suất cao (tới 150at) nhưng năng suất quá nhỏ(không quá 0,1m3/s).+)Bơm tia,bơm thùng nén,bơm sục khí có cấu tạo đặc biệt đơn giản,không có bộ phận dẫn động,có thể chế tạo bằng vật liệu có độ bền hóa học cao.Tuy nhiên các loại bơm này có hiệu suất rất thấp(như thùng nén có hiệu suất nhỏ hởn 20%,bơm tia và xiphông có hiệu suất từ 30-35%)=>Qua sơ bộ so sánh ưu nhược điểm và phạm vi sử dụng của các loại bơm trên,người ta sẽ chọn loại bơm thích hợp cho từng trường hợp cụ thể để có hiệu quả nhất.
Một số bơm thường dùng
I. Bơm thể tích
1. Bơm pittông
Căn cứ vào đặc điểm cấu tạo cụ thể và nguyên tắc hoạt động ta có thể chia nhóm bơm hoạt động theo
nguyên tác pittông thành một số loại bơm cụ thể như sau: Bơm pittông tác dụng đơn, bơm tác dụng kép, bơm vi
sai, bơm pittông quay hướng kính, bơm pittông quay hướng trục
Sau đây ta sẽ nghiên cứu cấu tạo và nguyên tắc một số loại bơm cụ thể hay được sử dụng trong công nghệ
Lọc – Hoá dầu
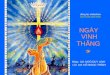
1.1 Bơm pittông tác dụng đơn
Cấu tạo và nguyên tắc hoạt động của bơm tác dịng đơn thể hiện ở hình ----
Pitông 2 chuyển động qua lại trong xi lanh 1 nhờ cơ cấu chuyển động gồm trục O, biên 5 và thanh truyền 4, con
trượt. Dung tích xi lanh nằm giữa hai điểm chết của pittông bằng dung tích chất lỏng trong mỗi lần hoạt động của
pittông ở điều kiện lý thuyết (không có tổn thất thể tích). Khi pittông chuyển động sang phải thì van 8 đóng, van 7
mở, chất lỏng từ bể 11 được hút lên xilanh. Khi pittông đến điểm chết bên phải thì hoàn thành quá trình hút. Sau
đó pittông chuyển động ngược lại thì van 7 đóng và van 8 mở ra, chất lỏng sẽ được đẩy lên bể chứa 10. Khi
pittông đến điểm chết trái thì quá trình đẩy hoàn thành. Như vậy, cứ mỗi vòng quay của trục O thì bơm thực hiện
được một chu trình hút và đẩy.
Hình----: Nguyên lý – cấu tạo của bơm pittông tác dụng đơn

1. Xi lanh 2. pittông 3. Cán pittông 4. Thanh truyền 5. Biên
6. ống hút 7. Van hút 8. van đẩy 9. ống đẩy 10. Bể chứa
11. bể hút 12. Lưới lọc 13. Culit (thay cho thanh truyền và con trượt)
1.2 Bơm pitông tác dụng kép
Bơm pitông tác dụng kép có pittông dạng tấm. Cấu tạo và hoạt động của loại bơm này được cho ở hình ----
. Khi pitông chuyển đọng từ trái qua phải thì phía trái thực hiện quá trình hút còn phía phải thực hiện quá trình
đẩy và ngược lại. Như vậy mỗi vòng quay của trục chính thì bơm thực hiện được hai lần hút và hai lần đẩy. Do
cán pittông chiếm chỗ nên mỗi lần hút đẩy của phía phải (phía có cán) kém hơn phía trái.
Hình ===: Cấu tạo và nguyên lý hoạt động của bơm pittông tác dụng kép
1,7: Các van hút 2,4: Các van đẩy 3,8: Cửa đẩy hút của bơm
5. Cán Pittông 6. Hộp chèn
Ưu điểm: năng suất cao, dòng chảy của chất lỏng ít biến động hơn loại tác dụng đơn.
Nhược điểm: Chiều dài lớn, lựa ép của pittông lên hai phía khác nhau, hộp chèn kín cho cán phức tạp và
hay hỏng, nhiều van.
1.3 Bơm vi sai
Bơm vi sai có cấu tạo gần giống như bơm pittông tác dụng kép nhưng khi nó hoạt động và lưu lượng mà
nó hút đẩy trong mỗi chu kì lại giống như bơm tác dụng đơn. Nguyên lý cấu tạo và hoạt động của bơm vi sai được
thể hiện như hình-----

Hình-----: Nguyên lý cấu tạo và hoạt động của bơm vi sai
1. Cửa cấp nước cho bơm 2. Van hút 3. Van đẩy
4. Cửa đẩy 5. Bỗu khí 6. Pittông
Từ hình ----- ta thấy: khi pittông chuyển động sang phải thì chất lỏng từ khoang B được chảy vào ống đẩy
với thể tích V1 còn khoang A sẽ hút chất lỏng với thể tích V2. Khi pittông chuyển động từ phải qua trái thì từ
khoang A chất lỏng sẽ chảy vào khoang B với thể tích V1 và đẩy vào ống dẫn chất lỏng là hiệu V2 – V1. Như vậy
cứ mỗi chu kì bơm hút và đẩy được một lượng chất lỏng là V2
Bơm vi sai được áp dụng trong các trường hợp lưu lượng vừa và nhỏ, áp suất không lớn.
1. Bơm bánh răng.
Nhờ kết cấu truyền động cặp bánh răng, dầu nhờn qua các rãnh răng theo chiều quay bánh răng guồng từ
cửa hút lên cửa đẩy của bơm rồi đẩy đi.
- Nguyên lý hoạt động: Trong hoạt động các rãnh răng thực hiện chức năng xi lanh còn các răng thực hiện
chức năng pít tông như vậy khi quay bơm sẽ liên tục hút và đẩy chất lỏng với lưu lượng khá đồng đều (số răng
càng nhiều thì lưu lượng càng đều).
Cấu tạo bơm bánh răng
a) Cấu tạo bơm
b) Thể hiện rãnh thông khử tải:
A – Rãnh thông

Kết cấu của bơm bánh răng rất đơn giản. Bánh răng chủ động 1 gắn liền trên trục chính của bơm, ăn khớp
với bánh răng bị động 2. Cả 2 đặt trong vỏ bơm 3 khoảng trống A giữa miệng hút và hai bánh răng gọi là bọng
hút. Khoảng trống B là bọng đẩy
Khi hoạt động 2 bánh răng quay theo chiều mũi tên lúc này chất lỏng ở trong rãnh các rãnh ngoài vùng ăn
khớp được chuyển từ bọng hút đến bọng đẩy vòng theo vỏ bơm vì thể tích chứa chất lỏng trong bọng đẩy giảm
khi răng của 2 bánh răng ăn khớp nên chất lỏng bị chèn ép và dồn vào ống đẩy với áp suất cao. Đây là quá trình
đẩy, đồng thời ở bọng hút cũng xẩy ra quá trình hút: Thể tích chứa chất lỏng tăng khi các răng ra khớp, áp suất
giảm hơn áp suất mặt thoáng bể hút làm chất lỏng chạy vào ống hút (nếu áp suất bể hút bằng áp suất khí quyển thì
trong bọng hút có áp suất chân không).
Theo nguyên lý làm việc ta thấy nếu trong bơm không có khe hở thì áp suất chất lỏng chỉ tăng khi nào chất
lỏng được chuyển đến bọng đẩy, như áp suất do bơm tạo nên chỉ phụ thuộc vào phụ tải trên ống đẩy. Nhưng thực
tế bao giờ cũng có khe hở giữa đỉnh răng với vở bơm, giữa hai mặt đầu bánh răng với vỏ bơm và giữa các mặt
răng nên chất lỏng được tăng áp suất sớm hơn trước khi đến bọng đẩy và chính các khe hở này gây ra, tổn thất lưu
lượng bơm, hạn chế khả năng tăng áp suất của bơm. Vì thế để hạn chế áp suất làm việc tối đa của bơm thì trong
các bơm bánh răng người ta thường bố trí 1 van an toàn ngay trong bơm để khi áp suất tăng quá lớn nó sẽ tự mở
cho một phần chất lỏng thoát về bọng hút.
Đặc điểm:
- Truyền động chắc chắn, tạo được áp suất khá lơn.
- Dễ gây tiếng ồn hơn bơm li tâm (mặc dù dùng bánh răng nghiêng, chữ V).
- Kết cấu bơm năng nề.
- Bơm được chất lỏng có độ nhớt cao.
- Phạm vi điều chỉnh lưu lượng cột áp nhỏ.
2. Bơm trục vít.
Hình -------: Cấu tạo nguyên lý hoạt động của bơm trục vít
a) Bơm trục vít
1. vỏ 2. Giá đỡ 3. Cửa hút 4. Xi lanh(Stato)
5. Trục vít (Rô to) 6. Trục Cácđăng 7,8. Khớp nối9. Hộp đệm kín
10. Đệm kín 11. Hộp chèn 12. ống lót 13. ống đỡ

14, 16. ổ bi 15. Trục chính
b) Bơm hai trục vít
1. Bánh răng dẫn 2. Bánh răng bị dẫn 3. Thân bơm
Nhờ kết cấu truyền động trục vít mà chất lỏng bơm chuyển động theo rãnh xoắn của trục vít tạo nên áp
suất cao đẩy chất lỏng qua bơm.
Bộ phận chủ yếu của bơm trục vít gồm 2 hay 3 trục vít ăn khớp với nhau đặt trong 1 vở máy cố định có lõi
dẫn chất lỏng vào và ra. Khe hở giữa trục vít và vỏ máy rất nhỏ (1/100mm) trục vít thường có 1 hoặc 2 mối ren và
biến dạng ren thường là ren hình chữ nhật, hình thang. Thường dùng loại bơm 3 trục vít: 1 trục vít chủ động và 2
trục vít bị động lắp ở hai bên trục chủ động. Hai trục bị động này có tác dụng làm kín chất lỏng ở trong rãnh ren
của trục chủ động cùng với vỏ bơm. Lượng chất lỏng này do sự quay của các trục vít được chuyển từ bọng hút ra
đến bọng đẩy và vào ống xả. Các đường ren của các trục vít đã ngăn cách bọng hút bọng đẩy một cách chắc chắn.
Các kích thước của các trục người ta chọn sao cho trục bị động quay được không phải do trục chủ động mà là do
năng lượng nén của chất lỏng bơm chuyển vì thế thường không cần có thêm bánh răng truyền động giữa các trục.
Đặc điểm:
- Kết cấu phức tạp, hạn chế về kích thước trục vít, rãnh vít nên lưu lượng thấp, dùng trong bơm chuyển
gần.
- Bơm được chất lỏng có độ nhớt lớn.
- Có khả năng tự hút.
- Truyền động êm chắc chắn.
3. Bơm Rôto cánh trượt
Bơm Rôto cánh trượt thường có lưu lượng từ 0,25 đến 20 m3/h áp suất đạt từ (15 - 100)105N/m2. Cấu tạo
và nguyên lý hoạt động của bơm rôto cánh trượt được thể hiện như hình====
Hình: Bơm rôto cánh trượt được cấp ngoài
1. Cánh trượt 2. Rãnh chứa cánh 3. Rôto 4. Stato
Hoạt động của bơm rôto cánh trượt được cấp ngoài như sau: khi rôto quay với vận tốc đủ lớn để các cánh 1
dưới tác dụng của lực ly tâm tì sát cạnh ngoài vào mặt trụ của stato 4 có độ lệch tâm với rôto 3 là e. Các canh 1
vừa quay theo rôto 3 vừa dịch chuyển qua lại trong rãnh 2 của rôto 3. Khi cánh 1 bắt đầu rời vị trí I thì quá trình

hút bắt đầu. Cánh I đến vị trí II rồi vị trí III thì quá trình hút ở mỗi khoang a nằm giữa hai cánh đã hoàn thành. Khi
cánh rời vị trí III thì quá trình đẩy bắt đầu và kết thúc khi cánh đến vị trí IV. Như vậy mỗi vòng quay của rôto 3
bơm sẽ cho một năng suất thể tích là q
q= .b.Z.e2.b.e2.R.2 dm3/s
Năng suất thể tích lý thuyết(không có tổn thất) của bơm rôto cánh trượt sẽ là:
60)ZeR.2(n.b.e2
n.qQlt
dm3/s
Năng suất thể tích thực của bơm sẽ là:
Qlttt .QQ
Trong đó: R- bán kính của vỏ Stato; dm
e - Độ lệch tâm; dm
b – Chiều rộng của cánh; dm
- Chiều dày cánh; dm
Z – Số cánh
n – số vòng quay của rôto; vg/ph
Q- hệ số hiệu dụng thể tích;
9,007Q
Trên hình ----- là cấu tạo và nguyên lý hoạt động của bơm rôto cánh trượt có đường hút và đẩy chất lỏng ở
tâm của rôto. Phía trên đường C – C là phía hút, còn phía dưới là phía đẩy của bơm. Khi đổi chiều quay của rôto
thì hai chỗ đẩy hút đổi chỗ cho nhau. Các thông số đạc trưng của bơm cũng tính toán như trên. Cũng có thể làm
răng 2 nghiêng về phía chiều tiến của cánh một góc 0156 tuỳ thuộc vào độ lớn của bơm nhằm mục đích
giảm lực ma sát giữa cánh và vỏ bơm.
Hình -------: Bơm rôto cánh trượt có cửa hút và đẩy bên trong
1. Cánh 2. Rãnh chứa cánh 3. Rôto 4. Lỗ cho chất lỏng đi qua

5. Cửa đẩy 6. Vách ngăn 7. Cửa hút 8. Stato
II. Bơm ly tâm
a. Định nghĩa: Là loại bơm làm việc theo nguyên lý truyền động nhờ lực li tâm (do kết cấu bánh công tác li tâm
tròn xoay quanh tạo ra). Tác động vào chất lỏng tạo nên lưu lượng và áp suất lớn qua bơm.
b. Cấu tạo:
Gồm 2 phần phần chính phần quay (rô to) bao gồm:
- Bánh công tác: Bánh bằng đồng hay bằng thép đúc, tròn xoay có cửa hút (5), các rãnh dẫn phân bố đều
trên chu vi bánh công tác (1), tiết kiệm rãnh dẫn nhỏ dần về vành ngoài để tăng áp suất.
- Có lỗ giữa để lồng vào trục
- Có rãnh then trục lỗ để lắp then truyền động.- Có vòng bảo vệ bánh công tác để làm kín bãnh công tác
với khoang và chống mòn cho đuôi bánh công tác chạm vào khoang.
- Trục (2) là chi tiết chính để lắp các chi tiết của rô to như bánh công tác, bộ làm kín, ổ và truyền chuyển
động quay.
Phần không quay (vỏ bơm, thân bơm, sát xi) vỏ bơm đúc liền hoặc 2 nửa ghép lại.
* Đặc điểm:
- Có các lỗ để lắp các ổ trục.
- Có luồng khoang để chứa bánh công tác và chứa nhiên liệu bơm.
- Rãnh dẫn nhiên liệu.
- Có bích cửa hút, cửa đẩy.
Sơ đồ bơm ly tâm
1. Bánh công tác 2. Trục bơm
3. Bộ phận dẫn hướng vào
4. Bộ phận dẫn hướng ra

- Bộ phận làm kín: Dùng các loại dây vaxe túp quấn nhiều vòng hoặc bộ làm kín mặt đầu.
c. Nguyên lý làm việc
Trục động cơ quay qua khớp nối làm trục bơm quay dẫn đến bánh công tác quay nhiên liệu từ ống hút (5)
chuyển động vào thân bơm 3 và được các rãnh của bánh công tác (1) mang theo vào chuyển động quay. Lực li
tâm làm cho nhiên liệu bị dồn chuyển động trong rãnh có thiết diện thay đổi giữa phần bơm và bánh công tác. Khi
đó vận tốc của nhiên liệu do tiết diện mặt cắt rãnh dần thay đổi nên vận tốc giảm dần cho đến khi đạt được vận tốc
nhiên liệu chuyển động trong ống đẩy (6). Lúc đó động năng của nhiên liệu biến thành thế năng làm cho áp suất
của chất lỏng tăng lên, đồng thời miệng vào của bánh công tác tạo nên một vùng có áp suất chân không và dưới
áp suất của nhiên liệu, vì vậy chất lỏng bị đẩy liên tục vào bơm qua ống hút.
d. Một số điểm chú ý khi vận hành bơm li tâm
Trước khi cho bơm làm việc phải mồi bơm. Có thể tạo chân không trong bơm, trong ống hút bằng thiết bị
tạo chân không hoặc đổ nhiên liệu vào bơm qua ống đẩy hay 1 ống phụ mồi.
- Trước khi khởi động phải kiểm tra dầu mỡ trong bơm nước làm mát, các mối ghép bulông độ xiết căng
bu lông ở các bộ phận làm kín, kiểm tra độ đóng chặt của các van công nghệ, tình trạng hệ thống điện và phải
nắm chắc yêu cầu về chế độ bơm chuyển (Q, H, …) lượng hàng cần bơm chuyển.
- Trước khi khởi động bơm phải khởi động hệ thống thông gió nhà bơm.
- Mở van hút hoàn toàn.
- Ấn nút khởi động bơm, chờ cho động cơ quay ổn định thì từ từ mở van xả
- Trong khi khởi động và làm việc phải luôn luôn theo dõi đồng hồ chân không và áp kế chú ý nghe tiếng máy để
phát hiện kịp thời những hiện tượng bất thường và xử lý kịp thời.
- Theo dõi lượng nước làm mát, bôi trơn và độ ò rỉ của bơm.
- Khi tắt máy làm thứ tự động tác ngược lại đóng van ống đầy trước tắt máy sau.
- Nghiêm cấm xiết, nới lỏng các bu lông thân bơm, bu lông làm kín, bu lông trên bích khi bơm đang làm
việc.
e. Một số sự cố và nguyên nhân trong khi vận hành:
- Các chi tiết chóng mòn
- Lưu lượng không đều.
- Truyền động phức tạp.
- Khó làm kín.
- Dùng bơm được các loại dầu sáng và dầu nhờn
2. Bơm xoáy lốc
a. Kết cấu và nguyên lý làm việc:

Cấu tạo của bơm xoáy lốc
1. Rôto cánh 2. Vỏ bơm
- Giữa bánh công tác và vỏ bơm có rãnh hình xuyến trên 1 đoạn cung AB, còn ở đoạn cung CD có khe hở rất nhỏ
đủ để bánh công tác không cọ sát vào vỏ bơm. Bơm có
bọng hút A và bọng đẩy B. Khi bánh công tác
quay do lực li tâm các phần tử chất
lỏng chuyển động từ trong ra ngoài
theo các cánh dẫn và đồng thời quay
theo cánh dẫn, khi ra đến rãnh hình
xuyến gặp vỏ bơm, chất lỏng quay
trở vào trong tạo thành 1 chuyển
động xoáy dọc theo rãnh hình xuyến.
Cứ mỗi vòng xoáy chất lỏng lại nhận
thêm cơ năng của cánh dẫn truyền cho,
do đó năng lượng của dòng chất lỏng
tăng dần trong quá trình chuyển động từ bọng hút đến bọng đẩy.
Như vậy bơm xoáy chỉ khác bơm li tâm là trong một vòng quay của bánh công tác mỗi phần từ chất lỏng
nhiều lần nhận được cơ năng của cánh dẫn truyền cho do đó cột áp của bơm xoáy cao hơn của bơm li tâm (cùng 1
kích thước, vòng quay lớn hơn từ 2 – 3 lần cột áp).
b. Đặc điểm:
- Tổn thất cột áp lớn, hiệu suất thấp. Nếu độ nhớt của nhiên liệu tăng thì hiệu suất càng giảm vì vậy bơm
chỉ dùng bơm dầu sáng.
- Công suất tiêu hao và chiều cao áp lực tăng khi lưu lượng giảm khi q = 0 thì công xuất và chiều cao áp
lực là lớn nhất. Để tránh chiều cao áp lực và công suất quá lớn, đồng thời để cho không khí lẫn trong chất lỏng
bơm thoát ra ngoài người ta đặt van an toàn hồi lưu trên thân bơm hay trên ống đẩy và khi khởi động bơm phải
mở hoàn toàn van đẩy.
- Bơm có khả năng tự hút tốt, có thể làm việc như một bơm chân không. Vì ống hút và đẩy đặt phía trên
bơm chỉ cần mồi bơm 1 lần.
- Bơm xoáy có thể làm việc với chất lỏng có tính bay hơi nhiên liệu hỗn hợp chất lỏng, khí nhưng những
hạt cứng trong chất lỏng bơm có thể làm mòn, sứt mẻ cánh bơm dẫn đến hiệu suất giảm.
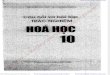
So sánh và lựa chọn bơm
Hiện nay trong công nghiệp nói chng và trong công nghiệp Lọc – Hoá dầu nói riêng các loại bơm dược sử
dụng rất rộng rãi. Sử dụng loại bơm nào là do yêu cầu kỹ thuật (Năng suất, công suất, hiệu suất) và các yêu càu
kinh tế (rẻ tiền, làm việc an toàn). Trên hình ----- là biểu đồ sử dụng các loại bơm khác nhau tuỳ thuộc và yêu cầu
về năng suất và áp suất cần sử dụng bơm.

Hình -----: Vùng áp dụng các loại bơm khác nhau
Tuy nhiên trong tất cả các loại bơm kể trên bơm ly tâm được dùng nhiều hơn cả, chứng cùng có ưu điểm
với bơm ly tâm như:
- Cung cấp đều
- Quay nhanh (có thể nối trực tiếp với động cơ)
- Thiết bị đơn giản
- Có thể bơm các chất lỏng không sạch
- Không có supap nên ít bị tắc và hư hỏng
Nhược điểm của bơm ly tâm so với bơm pittông là:
- Hiệu suất thấp hơn bơm pittông từ 10 – 15%
- Năng suất giảm khi áp suất tăng
Bơm ly tâm được sử dụng rộng rãi nhất tuy nhien nó được dùng trong phạm vi áp suất trung bình trở xuống
và năng suất trung bình trở lên.
Bơm pittông được dùng khi năng suất tương đối nhỉ nhưng áp suất tương dối cao và không đòi hỏi cung
cấp đều đặn. Bơm pittông chạy bằng hơi nước nên có thể dùng để bơm các chất lỏng dễ gây cháy nổ, hay bơm
chất lỏng có độ nhớt cao.
Khi cần bơm lưu lượng tới trên 30 m3/s và áp suất nhỏ (dưới 10 – 15 m) người ta sử dụng bơm hướng trục.
II- Phaïm vi söû duïng caùc loaïi maùy bôm
Bôm pittoâng thöôøng ñöôïc söû duïng vôùi coät aùp cao vaø löu löôïng nhoû.
Bôm roâto, truïc vít, raêng khía khoù cheá taïo oå truïc, söû duïng vôùi coät aùp < 300m.
Bôm caùnh coù keát caáu goïn nheï neân ñöôïc duøng roäng raõi vôùi coät aùp thaáp vaø löu löôïng trung bình ñeán raát lôùn.
Phaïm vi söû duïng caùc kieåu bôm ñöôïc theå hieän cuï theå treân ñoà thò (hình 03) trong toïa ñoä Logarit Q-H

Câu 1:Giới thiệu về đo lường và điều khiển
Trong công nghiệp nói chung và công nghiệp dầu khí nói riêng,người ta cần phải đo và điều khiển kiểm tra thường xuyên các đại lượng như:áp suất,nhiệt độ,nồng độ,lưu lượng…Đó là những quá trình đo liên tục. Các tín hiệu đo từ các cảm biến được gửi về các trung tâm xử lý số liệu. Do đó đảm bảo đo chính xác các thông số này có ảnh hưởng rất lớn đến quá trình sản xuất và chế biến dầu khí.
Điều khiểnq quá trình không phải là một lĩnh vực mới nhưng luôn chiếm vị trí quan trọng hàng đầu trong tự động hóa công nghiệp. Ngày nay các nhà máy xí nghiệp đã và đang được trang bị các hệ thống điều khiển tự động ở mức độ cao với các thiết bị tiên tiến. Hệ thống điều khiển tự động đảm bảo cho sự hoạt động của quy trình công nghệ đạt được kết quả mong muốn.
Cấu trúc hệ điều khiển tự động các quá trình công nghệ rất đa dạng,nhưng có thể chia thành hai mức : mức thấp và mức cao. Mức thấp là các hệ thống điều chỉnh tự động để đảm bảo môi trường cần thiết cho quy trình công nghệ. Mức cao là hệ thống tự động hóa điều khiển quy trình công nghệ . Mục đích của hệ thống này chỉ đảm bảo môi trường công nghệ mà còn bảo đảm sao cho quy trình công nghệ đạt được chất lượng tốt nhất.
Mức độ tự động hóa các dây chuyền sản xuất ngày càng phải được nâng cao để tăng năng suất và hạ giá thành sản xuất.
Ta hiểu tự động hóa điều khiển quá trình là sử dụng các dụng cụ thiết bị và các máy điều khiển.Những phương tiện kỹ thuật này cho phép thực hiện các quá trình công nghệ theo một chương trình đã được tạo dựng ,phù hợp với những tiêu chuẩn cho trước (các điều kiện) mà không cần sự than gia trực tiếp của con người.
Phụ lục 1Hệ đơn vị đo lường hợp pháp
(các đơn vị thường dùng trong kỹ thuật điện)

Sốthứ
tự
Tên đại lượngĐơn vị trong hệ hợp pháp
Ghi chúTên Ký hiệu
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Chiều dài
Khối lượng
Thời gian
Cường độ dòng điện
Lực
Tần số
Công, năng lượng
Công suất
Điện tích
Điện thế, điện áp, sức điện
động
Cường độ điện trường
Điện trở
Điện dẫn
Điện dung
Điện cảm
Cường độ từ trường
Từ cảm
Từ thông
Sức từ động
Mét
Kilogam khối
Giây
Ampe
Niutơn
Hec
Jun
Oát
Culông
Vôn
Vôn trên mét
Ôm
Simen
Fara
Henri
Ampe trên mét
Tesla
Vebe
Ampe vòng
M
Kg
S
A
N
Hz
J
W
C
V
V/m
Ω
S
F
H
A/m
T
Wb
Avg
Các đại lượng Tên đơn vị Kí hiệuĐộ dài mét mKhối lượng kilôgam kgThời gian giây sDòng điện ampe A
166
3


A. Giới thiệu về đo lường1. Các khái niệm cơ bản về đo lường
1.1 khái niệm đo lường- Đo lường la khoa học về các phép đo,các phương pháp và các công cụ đảm bảo cho kết quả
đo đạt được độ chính xác mong muốn. Các hướng nghiên cứu chính của đo lường bao gồm:+)Các lý thuyết chung về phép đo.+)Các đơn vị vật lý và hệ thống của chúng.+)Các phương pháp và công cụ đo,biện pháp nâng cao độ chính xác của phép đo+)Phương pháp xác định độ chính xác của phép đo.+)Phương pháp đảm bảo cho việc thống nhất giữa phép đo và rất nhiều công cụ làm việc.+)Công cụ đo chuẩn và barem+)Các phương pháp để chuyển đơn vị đo từ công cụ chuẩn hoặc gốc ra công cụ làm việc.
- Phép đo là công việc thực hiện chính của đo lường,đó là việc tìm ra giá trị vật lý bằng các thí nghiệm với sự trợ giúp của các công cụ kỹ thuật đặc biệt.Giá trị tìm được gọi là kết quả của phép đo.Phép đo có bản chất là quá trình so sánh đại lượng vật lý cần đo với một đại lượng vật lý được dùng làm đơn vị,kết quả của phép đo được biểu diễn bằng một số là tỷ lệ của đại lượng cần đo với đơn vị đó. Như vậy để thực hiện phép đo,ta cần phải thiết lập đơn vị đo,so sánh giá trị của đại lượng cần đo với đơn vị và ghi nhận kết quả so sánh được.
1.2 Các phương pháp và biện pháp đo lường cơ bản
+)phương pháp đo trực tiếp
+)phương pháp đo gián tiếp
+)phương pháp đo kết hợp tương quan
- Đo trực tiếp:là phương pháp dùng các máy đo hay các mẫu đo để đánh giá số lượng của đại lượng cần được đo. Kết quả đo được chính là trị số của đại lượng cần đo,mà không phải tính toán thông qua phương trình vật lý nào liên quan giữa các đại lượng ,giá trị đại lượng cần đo được so sánh trực tiếp với giá trị đơn vị đo để xác định chỉ số đo.
- Đo gián tiếp : là phương pháp đo mà kết quả đo được không phải là trị số của đại lượng cần đo,mà là các số liệu cơ sở để tính ra trị số của đại lượng này. Giá trị đơn vị đo các thông số này không tồn tại trong thực tế mà chỉ là giá trị trừu tượng.
- Đo kết hợp: kết quả nhận được bằng cách giải hệ phương trình, được xác lập trên cơ sở các phép đo trực tiếp,phép đo kết hợp chỉ ứng dụng trong điều kiện thí nghiệm và trong nghiên cứu.
- Đo tương quan:dùng trong những trường hợp cần đo các quá trình phức tạp.- Ngoài ra,còn 1 số các phương pháp đo khác thường được thực hiện trong quá trình đo
lường: phương pháp đo thay thế,phương pháp hiệu số,phương pháp vi sai,phương pháp đo thẳng,phương pháp đo rời rạc hóa.
Đặng văn tùng k53_ lọc hóa dầu

1.3 Phân loại dụng cụ đo- Theo cách thông báo kết quả đo,các dụng cụ đo được phân thành: dụng cụ tự chỉ ,dụng cụ
tự ghi,và đồng hồ tổng ghiDụng cụ tự ghi được trang bị phương tiện cho phép tự động ghi kết quả đo trên giấy hoặc trên các phần tử nhớ.Dụng cụ tự ghi có loại một điểm và loại nhiều điểm đo.
- Theo đại lượng đo (thông số đo) các dụng cụ đo phân thành dụng cụ đo nhiệt đô,áp suất và chân không,lưu lượng và số lượng,mức,thành phần chất lượng và trạng thái của chất và các thông số khác.
2. Định giá sai số trong đo lường2.1 Nguyên nhân và phân loại sai số trong đo lường
- Các nguyên nhân gây sai số:+)Các nguyên nhân khác quan.ví dụ:dụng cụ đo lường không hoàn hảo ,đại lượng đo được bị can nhiễu…+)Các nguyên nhân chủ quan.Ví dụ:do thiếu thành thạo,phương pháp tiến hành không hợp lý.
- Phân loại sai số:+)Sai số hệ thống:sai số này do những yếu tố thường xuyên hay các yếu tố có quy luật tác động. Nó khiến kết quả đo hoặc là lớn hơn hoặc là bé hơn giá trị thực.+)Sai số ngẫu nhiên: là sai số do các yếu tố biến đổi bất thường không có quy luật tác động.
- Các biểu thức diễn đạt sai số+)Sai số tuyệt đối là trị tuyệt đối của hiệu số giữa hai giá trị đo được và giá trị thực của đại lượng cần đo.+)Sai số tương đối:là tỷ số của sai số tuyệt đối và trị số thực của đại lượng cần đo.
2.2 Một số khái niêm cơ bản về đo lường.- Chuẩn đo: là tái lập vật chất của đơn vị đo,giá trị bội số hoặc ước số của đơn vị đo.- Dụng cụ đo: là thiết bị nhờ nó ta thực hiện phép so sánh đại lượng với đơn vị đo.- Các chuẩn mẫu và dụng cụ đo mẫu: là các chuẩn và dụng cụ dùng để bảo quản và phục hồi
đơn vị đo,để kiểm định và khắc độ các chuẩn và các dụng cụ đo khác.- Kiểm định: là thao tác so sánh các chuẩn và dụng cụ đo công nghiệp với các chuẩn và dụng
cụ mẫu.- Khắc độ:là thao tác gán giá trị ở đơn vị đo cho các vạch trên thang đo.- Thang đo:là tổ hợp các vạch,mô tả dãy trình tự các số,ứng với các giá trị của đại lượng đo.- Biểu đồ:là giấy có lưới tọa độ,dùng để ghi các chỉ thị của dụng cụ đo tự ghi.- Chỉ số đo:là số đọc trong phép đo theo chỉ thị ở thang đo hoặc ở biểu đồ.- Vạch thang đo:dấu ứng với từng giá trị riêng biệt của đại lượng đo.- Điểm không của thang đo: Vạch thang đo,ứng với giá trị không của đại lượng đo.Nếu điểm
không là điểm đầu hoặc điểm cuối của thang đo,thì thang đo thuộc loại một phía. Khi các vạch thang đo,thì thang đo thuộc loại một phía. Khi các vạch thang đo phân bố theo hai phía so với điểm không thì thang đo thuộc loại hai phía.
- Chỉ thị của dụng cụ đo:là giá trị của đại lượng đo xác định theo chỉ số đo.
Đặng văn tùng k53_ lọc hóa dầu

- Giới hạn chỉ thị của dụng cụ đo:giá trị của đại lượng đo,ứng với các điểm đầu và điểm cuối của thang đo.
- Phần làm việc của thang đo: là phần của thang đo, trong đó giới hạn đó sai số chỉ thị của dụng cụ đo không vượt quá các đại lượng quy định.
- Hằng số của dụng cụ đo: là đại lượng cần nhân với chỉ số đo để nhận được giá trị của đại lượng cần đo.
- Các giới hạn đo của dụng cụ đo: là các giá trị của đại lượng đo, giới hạn miền trong phạm vi đó sai số chỉ thị của dụng cụ không vượt quá những đại lượng quy định,nghĩa là giới hạn phần làm việc thang đo.
- Hiệu chỉnh: là đại lượng cần được thêm (bớt) vào chỉ thị của dụng cụ do để nhận được giá trị thực của đại lượng đo.Hiệu chỉnh bằng sai số chỉ thị của dụng cụ đo, tính với dấu đảo ngược.
- Hệ số điều chỉnh: là thừa số cần được nhân với chỉ thị của dụng cụ đo để nhận được giá trị thực của đại lượng đo.
- Độ phân rã của dụng cụ đo: là hiệu số lớn nhất giữa các chỉ thị số của dụng cụ đo trong phép đo lặp lại ứng với một giá trị thực của đại lượng đo khi điều kiện bên ngoài không thay đổi.
- Độ nhạy của dụng cụ đo: là tỷ số giữa độ dịch chuyển thẳng hoặc dịch chuyển góc của kim chỉ thị với độ thay đổi nhỏ giá trị của đại lượng đo do độ dịch chuyển đó tạo ra.Độ nhạy tỷ lệ nghịch với giá trị vạch đo.
- Ngưỡng nhạy cảm của các dụng cụ đo: là độ thay đổi nhỏ nhất giá trị của đại lượng đo,có khả năng tạo ra sự thay đổi chỉ thị của dụng cụ đo.
- Kim chỉ thị: là chi tiết cho ta đọc chỉ thị số đo trên thang đo.- Khoảng chia của thang đo: là khoảng các giữa hai trục của vạch đo kề nhau thuộc thang đo.- Độ trễ: là khoảng thời gian tính từ thời điểm có sự biến đổi của đại lượng đo đến thời điểm
chỉ thị sự biến đổi đó bằng kim chỉ thị của dụng cụ đo. Độ trễ đặc trưng cho quán tính của dụng cụ đo.
- Hệ số nhiệt độ: là sự thay đổi tương đối chỉ số của dụng cụ đo khi nhiệt độ của dụng cụ đo thay đổi.
- Công thức nhiệt: là công thức mô tả quy luật thay đổi chỉ số của dụng cụ đo khi nhiệt độ của dụng cụ đô thay đổi.
- Sai số cho phép : là giá trị sai số chỉ thị lớn nhất của dụng cụ được văn bản pháp quy cho phép.
- Sai số cơ bản: là sai số chỉ thị của dụng cụ đo xác định trong các điều kiện làm việc chuẩn,khi ảnh hưởng của các yếu tố không thuận lợi bên ngoài,đến phép đo ở mức tối thiểu.
- Sai số bổ sung: là sai số chỉ thị của dụng cụ đo,phát sinh dưới tác động của những điều kiện bên ngoài vào dụng cụ đo,khi điều kiện làm việc không phải là điều kiện tiêu chuẩn.
- Sai số dụng cụ: là sai số có nguyên nhân xuất hiện do tính chất của các phương tiện được sử dụng trong phép đo.
- Cấp chính xác của dụng cụ đo.2.3 Các phương pháp khử sai số và xác định kết quả đo.
Đặng văn tùng k53_ lọc hóa dầu

Sau khi đó ta có thể loại bỏ các sai số hệ thống được. Sự xử lý này được thực hiện đơn giản bằng phép cộng đại số. Sai số ngẫu nhiên được tính toán với một số hữu hạn n lần đo,có trình tự sau:+) Tính trị số trung bình cộng của n lần đo+) Tính sai số trung bình bình phương.
3. Cảm biến đo và chuyển đổi đo3.1 Cảm biến đo:là thiết bị thụ nhận giá trị đại lượng cần đo và chuyển đổi sang dạng tín hiệu khác
trên hiện tượng xảy ra trong lòng nó.
Mô Hình Cảm Biến ĐoNói cách khác, cảm biến là thiết bị dùng để cảm nhận và biến đổi các đại lượng vật lý cần đo thành các đại lượng vâtl lý cần đo thành các đại lượng đo chứa đựng thông tin cho phép xác định giá trị đại lượng cần đo.
- Độ nhạy của cảm biến đo: là sự thay đổi giá trị tín hiệu ra của cảm biến đo có thể thu nhận và chuyển đổi đảm bảo độ chính xác cần thiết và không lam hư hỏng cảm biến đo.
- Thời gian quá độ của cảm biến đo là khoảng thời gian cần thiết để tiến hành một lần đo riêng lẻ.
- Sai số của cảm biến: gồm hai loại sai số cơ bản và sai số phụ.- Đường cong chuẩn của cảm biến là đường cong biểu diễn sự phụ thuộc của đáp ứng đầu ra
của cảm biến vào giá trị của đại lượng đo.- Phương pháp chuẩn của cảm biến:chuẩn cảm biến là phép đo nhằm mục đích xác lập mối
quan hệ giữa giá trị đo được của đại lượng điện ở đầu ra và giá trị của đại lượng đo có tính đến các yếu tố ảnh hưởng,trên cơ sở đó xây dựng đường cong chuẩn dưới dạng tường minh (đồ thị hoặc biểu thức đại số).
3.2 Chuyển đổi đo là thiết bị chuyển tín hiệu từ dạng này sang dạng khác thuận tiện cho việc truyền tín hiệu hoặc xử lý tín hiệu X Y
- Đăc tuyến của chuyển đổi đo là mối liên hệ giữa tín hiệu ra y của chuyển đổi đo và tín hiệu vào x của nó. Đặc tuyến này luôn tuyến tính (y=ax hoặc y=ax + b,a và b là hằng số).
- Giới hạn chuyển đổi đo:gồm giới hạn tín hiệu vào xmin-xmax và giới hạn tín hiệu ra ymin-ymax - Sai số chuyển đổi đo:gồm sai số cơ bản và sai số phụ
3.3 Chuyển đổi đo lường sơ cấpTrong nhiều hệ thống ,cảm biến đo thường được gắn liền với chuyển đổi đo tạo thành một thiết bị hoàn chỉnh được gọi là chuyển đổi đo lường sơ cấp.
Đặng văn tùng k53_ lọc hóa dầu
CĐĐ

X Y
Các chuyển đổi đo lường sơ cấp được gắn với đối tượng đo có đầu ra dạng tín hiệu điện hoặc tín hiệu khí nén.Đặc tuyến của chuyển đổi sơ cấp cũng mang tính tuyến tính như chuyển đổi đo.
3.4 Giới thiệu các cảm biến và chuyển đổi đo nhiệt độ
Các phương pháp đo nhiệt độ bao gồm:cặp nhiệt điện,nhiệt kế điện trở,nhiệt kế điện trở bán dẫn,hỏa kế và các IC cảm biến nhiệt độ.
3.4.1 Nhiệt kế giãn nở:nguyên lý hoạt động dựa vào sự giãn nở của vật liệu khi tăng nhiệt độ.Các nhiệt kế giãn nở:nhiệt kế giãn nở dùng chất rắn,nhiệt kế giãn nở dùng chất lỏng.
3.4.2 Cặp nhiệt điện:là cảm biến đo nhiệt độ,chuyển tín hiệu nhiệt độ sang tín hiệu điện áp dựa trên hiện tượng nhiệt độ.Trong thực tế ,cặp nhiệt điện thường được sử dụng để đo nhiệt độ của một môi trường hay vật thể .Một số cặp nhiệt điện tiêu chuẩn:cặp nhiệt điện cromen-coper,cặp nhiệt điện cromen-alumen,cặp nhiệt điện platinorôđi-platin,cặp nhiệt điện hợp kim platin và rodi
3.4.3 Nhiệt kế điện trở+)Nguyên lý hoạt động:dựa trên sự phụ thuộc điện trở của vật dẫn vào nhiệt độ của nó theo công thức: Rt=f(R0,t) Trong đó : R0 là điện trở của dây dẫn ở 00C Rt là điện trở của dây dẫn ở t0C+)Một số IC cảm biến đo nhiệt độ Vi mạch LM335 Vi mạch LM 34 Vi mạch AD 590 (AD 592)
3.4.4 Hỏa kế:là dụng cụ đo nhiệt độ không tiếp xúc.Theo nguyên lý làm việc người ta chia ra :hỏa kế bức xa toàn phần, hỏa kế quang.+)Hỏa kế bức xạ toàn phần :Năng lượng bức xạ toàn phần của vật đen tuyệt đối tỷ lệ với lũy thừa bậc 4 của nhiệt độ tuyệt đối của nhiệt độ tuyệt đối của vật: E=αT4
Trong đó :α là hệ số bức xạ T-nhiệt độ tuyệt đối của vật đen tuyệt đối(K)+)Hỏa kế quang:nguyên tắc là so sánh độ sáng của vật cần đo và độ sáng của một đèn mẫu ở trong cùng một bước song nhất định và theo cùng một hướng.Khi độ sáng của chúng bằng nhau thì nhiệt độ của chúng bằng nhau
3.5 Các cảm biến và chuyển đổi đo áp suất.3.5.1 Áp kế định mức dịch thể.
+)Nguyên lý làm việc của áp kế dịch thể là sự hình thành cột thể chênh lệch giữa hai mức dịch thể thông nhau dưới tác động của áp suất khác nhau.
Đặng văn tùng k53_ lọc hóa dầu
CBĐ CĐĐ

+)Áp kế chữ U là thiết bị đo áp suất tại chỗ.Nó có thể sử dụng đo áp suất dư,áp suất chân không và hiệu áp suất giữa hai môi trường.
3.5.2 Các cảm biến đo áp suất.a) Cảm biến đàn hồi:Nguyên lý là dựa vào tính chất của các vật thể đàn hồi.Đặc tính
tĩnh của cảm biến đàn hồi có thể là tuyến tính hoặc phi tuyến phụ thuộc vào cấu trúc và hình thức tác động lên nó.Các cảm biến đàn hồi thường được sử dụng là:lò xo ống một vòng,lò xo ống nhiều vòng,màng đàn hồi ,màng hộp nhiều tầng,màng xếp hay còn gọi là cảm biến chuông và cảm biến phao.
3.5.3 Các bộ chuyển đổi đo.a) Biến áp vi sai:là chuyển đổi sang tín hiệu điện và chuyển đổi khí nén được sử dụng
nhiều nhất.Biến áp vi sai là bộ chuyển đổi tín hiệu dịch chuyển sang điện áp xoay chiều
b) Chuyển đổi sơ cấp đo áp suất:chuyển đổi sơ cấp đo áp suất là thiết bị được tạo ra do sự ghép nối cảm biến đo vàchuyển đổi đo.
3.6 Các cảm biến và chuyển đổi đo lưu lượng3.6.1 Đo lưu lượng theo độ giảm áp thay đổi
a) Nguyên lý hoạt động :Một trong những phương pháp khá phổ biến để đo lưu lượng dịch thể chất khí và hơi quá nhiệt chảy trong đường ống là đo hiệu áp suất hai bên thiết bị thu hẹp.Thiết bị thu hẹp đóng vai trò cảm biến đo.Giá trị hiệu áp suất này phụ thuộc vào lưu lượng của dòng chảy trên đường ống.
b) Các thiết bị thu hẹp tiêu chuẩn:là những thiết bị mà dựa trên thông số ban đầu như: tính chất của dòng chảy,đường kính của đường ống,giới hạn đo của thiết bị gây áp suất…vv.Các thiết bị thu hẹp bao gồm:tấm lỗ tiêu chuẩn,mỏ phun tiêu chuẩn,mỏ phun venture tiêu chuẩn và ống venture tiêu chuẩn.
3.6.2 Đo lưu lượng theo độ giảm áp suất không đổia) Nguyên lý đo lưu lượng theo độ giảm áp không đổi.Lưu lượng dòng chảy khi đi qua
bộ phận thu hẹp cảu dòng cahỷ tỷ lệ với căn bậc hai của hiệu áp suất hai bên bộ phận thu hẹp và tỷ lệ bậc nhất với diện tích thoát của dòng chảy tại vị trí thu hẹp.lưu lượng của dòng chảy được xác định thông qua giá trị diện tích.Thiết bị này được gọi là rotamet và phương pháp đo lưu lượng bằng rotamet được gọi là phương pháp đo lưu lượng theo độ giảm áp không đổi.
b) Cấu trúc của rotamet:cấu trúc của rotamet rất đa dạng, nhưng có thể chia làm hai loại:rotamet chỉ thị tại chỗ (rotamet phòng thí nghiệm) và rotamet có thiết bị chuyển đổi để truyền tín hiệu đi xa (rotamet công nghiệp)
b1) Rotamet trong phòng thí nghiệm.+)Nguyên lý cấu tạo của Rotamet chỉ thị tại chỗ bao gồm ống thủy tinh hình côn 1 trên có thang chia độ,đáy nhỏ phía dưới đáy lớn phía trên.+)Nguyên lý hoạt động của rotamet như sau: khi trong đường ống có dòng chảy thì dưới tác dụng của áp lực dòng chảy phao sẽ được nâng lên.Tiết diện thoát của dòng chảy tăng lên.Áp lực cảu dòng chảy lên phao giảm xuống cho đến áp lực của
Đặng văn tùng k53_ lọc hóa dầu

dòng chảy lên phao cân bằng với khối lượng của phao.Vị trí cân bằng của phao phụ thuộc vào lưu lượng của dòng chảy trong đường ống. b2)Rotamet trong công nghiệp:là chuyển đổi sơ cấp đo lưu lượng theo độ giảm áp không đổi có trang bị bộ chuyển đổi sang tín hiệu điện hoặc tín hiệu khí nén để truyền đi xa.Các rotamet này được chế tạo với than bằng kim loại,còn phao gắn liền động với chuyển đổi đo.
3.6.3 Một số phương pháp đo lưu lượng kháca) Đo lưu lượng theo tốc độ trung bình của dòng chảyb) Phương pháp tuốc binc) Đo lưu lượng theo độ chênh áp ở khuỷu cong đường ốngd) Lưu lượng kế siêu âme) Lưu tốc kế siêu âm
3.7 Đo mức3.7.1 Khái niệm về phương pháp đo
Đo và phát hiện mức chất lưu là xác định mức hoặc lượng chất trong bình chứa.Có hai dạng đo: đo liên tục và xác định theo ngưỡng.Có 3 phương pháp hay dùng trong kỹ thuật đo và phát hiện mức chất lưu: +)Phương pháp thủy tĩnh dùng biến đổi điện +)Phương pháp điện dựa trên tính chất điện của chất lưu +)Phương pháp bức xạ dựa trên sự tương tác giữa bức xạ và chất lưu
3.7.2 Cảm biến đo mức theo phương pháp thủy tĩnh3.7.3 Cảm biến đo mức theo phương pháp điện
Hoạt đông theo nguyên tắc chuyển đổi trực tiếp biến thiên mức chất lỏng thành tín hiệu điện dựa vào tính chất điện của chất lưu.Các cảm biến thường dùng là cảm biến độ dẫn và cản biến điện dung.
a) Cảm biến độ dẫn:các cảm biến loại này dùng để đo mức các chất lưu có tính dẫn điệnb) Cảm biến tụ điện:khi chất lỏng là chất cách điện,có thể tạo tụ điện bằng hai điện cực
hình trụ nhúng trong chất lỏng hoặc một điện cực kêt hợp với điện cực thứ hai là thành bình chứa nếu thành bình làm bằng kim loại.Việc đo mức chất lưu được chuyển thành đo điện dụng của tụ điện,điện dụng này thay đổi theo mức chất long trong bình chứa.
3.7.4 Cảm biến đo mức theo phương pháp bức xạCảm biến bức xạ cho phép đo mức chất lưu mà không cần tiếp xúc với môi trường rất thích hợp khi đo ở điều kiện môi trường có tính ăn mòn mạnh.
B. Giới thiệu về điều khiển1. Khái quát chung về điều khiển
1.1 Các khái niện cơ bản:+)Điều khiển nói chung là khoa học nghiên cứu quá trình thu thập,xử lý tín hiệu về quá trình hoạt động,trên cơ sở đó tạo ra tác động điều khiển để quá trình hoạt động đạt được mục đích mong muốn
Đặng văn tùng k53_ lọc hóa dầu

+)Hệ thống điều khiển nói chung bao gồm hai thành phần cơ bản là :đối tượng điều khiển(ĐTĐK) và chủ thể điều khiển (CTĐK) .Sơ đồ khối hệ thống điều khiển:
zu y
Sơ Đồ Khối Hệ Thống Điều Khiển ĐTĐK là thiết bị công nghệ hoặc quy trình công nghệ bắt buộc phải hoạt động theo đúng mục đích nhất định của hoạt động công nghệ dưới sự tác động của tác nhân điều khiển u được phát ra từ CTĐK.
zx u y
Sơ Đồ Khối Hệ Thống Điều Khiển Tự Động Trong hệ thống điều khiển ,con người chỉ có nhiệm vụ duy nhất là tạo ra tín hiệu chủ đạo x tác động lên TBĐK.TBĐK được hiểu là mục đích của hoạt động công nghệ và sẽ điều khiển ĐTĐK hoạt động theo đúng mục đích này.x là nhiễu có mục đích và hệ thông ĐKTĐ phải thực hiện mục đích này của hoạt động.z là nhiễu không có mục đích,tác động của nó làm cho hoạt động lệch hkỏi mục đich mong muốn. Có 3 phương pháp điều khiển cơ bản:điều khiển theo chương trình,điều khiển bù nhiễu và điều khiển theo sai lệch.Trong công nghiệp người ta sử dụng phương thức điều khiển theo sai lệch vi hệ thống điều khiển trong công nghiệp chịu rất nhiều nhiễu phụ tải.+)Trạng thÍ xác lập là trạng thái hệ thống không vận động,các thông tin trong hệ thống không thay đổi,trạng thái này luôn tồn tại khi hệ thống chưa chịu tác động của nhiễu hay quá trình điều khiển đã kế thúc.Trang thái quá độ là sự vận động của hệ thống khi có tác động của nhiễu.
1.2 Phân loại hệ thống điểu chỉnh tự động+)Phân loại theo trạng thái xác lập:hệ thống có sai lệch tĩnh và hệ thống không có sai lệch tĩnh+)Theo trang thái quá độ phân thành hệ thống dao động và hệ thống không dao động…+)Để nghiên cứu về phương diện lý thuyết gồm:hệ thống tuyến tính và hệ thống phi tuyến tính.Theo tính chất truyền tín hiệu,hệ tuyến tính được phân thành 2 loại:hệ thống tuyến tính liên tục và hệ thống tuyến tính gián đoạn.Trong hệ thống tuyến tính liên tục,tín hiệu truyền đi liên tục trong tất cả các mắt xích của nó.Lý thuyết điều khiển tuyến tính được phân thành hai loại:lý thuyết điều khiển hệ tuyến tính liên tục và lý thuyết điều khiển hệ tuyến tính xung-số+)Dựa trên tính chất thu thập mà hệ thông điều chỉnh được chia ra:hệ thống điều chỉnh thông thường và hệ thống điều chỉnh đặc biệt
Đặng văn tùng k53_ lọc hóa dầu
CTĐK ĐTĐK
TBĐK ĐTĐK

Như vậy lý thuyết điều khiển được phân thành 4 phần:lý thuyết hệ tuyến tính liên tục thông thường,lý thuyết hệ tuyến tính xung số,lý thuyết hệ phi tuyến tính và lý thuyết hệ đặc biệt
1.3 Nhiệm vụ của lý thuyết điều khiển Nó có hai chức năng cơ bản là tổng hợp lý thuyết hệ thống điều khiển và phân tích chất lượng hệ thống.Nhiệm vụ tổng hợp lý thuyết hệ thống điều khiển là phải xây dựng mô hình toán học của hệ thống điều khiển,nghiên cứu các đặc tính của đối tượng điều khiển mà mục đích cuối cùng là xác định mô tả toán học của đối tượng điều khiển. Sau khi xác định mô tả toán học của đối tượng điều khiển thì tiến hành chọn thuật toán điều khiển.Nghĩa là phải xác định mô tả tóan học của thiết bị điều khiển cần thiết.Cuối cùng là xác địnhmô tả toán học của hệ thống điều khiển dựa trên các mô hình toán học của hệ thống điều khiển dựa trên các mô hình toán học của ĐTĐK,của TBĐK và mối liên hệ giữa chúng. Nhiệm vụ tiếp theo của lý thuyết điều khiển tự động là đánh giá chất lượng của hệ thống dựa trên mô hình toán học cảu hệ thống vừa xây dựng được.Mục đích:phải kết luận được khả năng sử dụng hệ thống trong thực tế.Khả năng này được đánh giá dựa trên điều kiện cần thiết và điều kiện đầy đủ để hệ thống có thể sử dụng đúng.Bước đầu tiên khảo sát chất lượng chỉ kết thúc khi đạt được điều kiện hệ thống điều khiển ổn định. Ổn định mới là điều kiện cần thiết để hệ thống có thể sử dụng trong thực tế.
2. Cơ sở về điều khiển quá trình.2.1 Điều khiển quá trình là gì?
Điều khiển quá trình được hiểu là ứng dụng kỹ thuật điều khiển tự động trong điều khiển,vận hành và giám sát các quá trình công nghệ nhằm đảm bảo chất lượng sản phẩm,hiệu quả sản suất và an toàn con người,máy móc và môi trường.
2.1.1 Quá trình và các biến quá trình+)Quá trình được định nghĩa là một trình tự các diễn biến vật lý,hóa học hoặc sinh học trong đó,vật chất và năng lượng hoặc thông tin được biến đổi,vận chuyển hoặc lưu trữ+)Quá trình công nghệ là những quá trình liên quan tới biến đổi,vận chuyển hoặc lưu trữ vật chất và năng lượng,nằm trong một dây chuyền công nghệ hoặc một nhà máy sản xuất năng lượng+)Quá trình kỹ thuật là một quá trình với các đại lượng kỹ thuật được đo hoặc/và được can thiệp.+)Biến vào là một đại lượng hoặc một điều kiện phản ánh tác động từ bên ngoài vào quá trình.+)Biến ra là một đại lượng hoặc một điều kiện thể hiện tác động của quá trình ra bên ngoài .+)Biến trạng thái mang thông tin trạng thái bên trong quá trình
Đặng văn tùng k53_ lọc hóa dầu

+)Biến cần điều khiển là một biến ra hoặc một biến trạng thái của quá trình được điều khiển,điều chỉnh sao cho gần với một giá trị mong muốn hay giá trị đặt hoặc bám theo một biến chủ đạo/tín hiệu mẫu.+)Biến điều khiển là một biến vào của quá trình có thể can thiệp trực tiếp từ bên ngoài,qua đó tác động tới biến theo ý muốn.+)Những biến vào còn lại không can thiệp được một các trực tiếp hay gián tiếp trong phạm vi quá trình đang quan tâm được gọi là nhiễu.
Biến Vào
Biến Điều Khiển Nhiễu
Vật chất Vật chấtNăng lượng Năng lượngThông tin Thông tin
Biến Trạng Thái Biến ra
Biến không cần Biến cần điều Biến không cần
Điều khiển Khiển Điều khiển
Quá Trình Và Phân Loại Biến Quá Trình
2.2 Phân loại quá trình+)Cách phân loại thứ nhất là dựa trên số lượng biến vào và biến ra.Một quá trình chỉ có một biến ra được gọi là quá trình đơn biến,còn nếu nhiều biến ra thì được gọi là quá trình đa biến+)Dựa trên đặc tính đặc trưng,ta cũng có thể phân loại các quá trình thành quá trình liên tục,quá trình gián đoạn,quá trình rời rạc và quá trình mẻ
2.3 Mục đích và chức năng điều khiển quá trìnha) Đảm bảo vận hành hệ thống ổn định,trơn tru:một quá trình ổn định khi mà nó được
duy trì ở trang thái xác lập hay nói cách khác là ở trạng thái cân bằng vật chất và năng lượng,có nghĩa là trang thái mà lượng vật chất hoặc năng lượng tích lũy của nó không thay đổi.Vận hành trơn tru,ổn định đồng nghĩa với việc tín hiệu điều khiển được giữ cố định hoặc ít thay đổi,đảm bảo năng suất và chất lượng sản phẩm theo yêu cầu.
Đặng văn tùng k53_ lọc hóa dầu
QUÁ TRÌNH

b) Đảm bảo năng suất và chất lượng sản phẩm:chất lượng điều khiển có vai trò quyết định tới,nhưng không đồng nghĩa với chất lượng sản phẩm
c) Đảm bảo vận hành hệ thống an toàn:bất cứ một giải pháp điều khiển quá trình công nghiệp nào cũng phải đảm bảo vận hành hệ thống một các an toàn và để bảo vệ con người,các thiết bị máy móc và môi trường xung quanh trong các trường hợp xảy ra sự cố.Chức năng đình chỉ là một trong hang loạt biện pháp cần thiết bảo đảm sự vận hành an toàn cho hệ thống.
d) Bảo vệ môi trường thông qua giảm nồng độ khí thải độc hại,giảm lượng nước sử dụng và nước thải,hạn chế lượng bụi và khói.
e) Nâng cao hiệu suất kinh tế:để đạt được hiệu quả kinh tế,hệ thống điều khiển quá trình không những phải đảm bảo chất lượng theo yêu cầu,mà năng suất phải thích ứng với yêu cầu thị trường cũng như tiêu hao ít nguyên liệu và nhiên liệu.
2.4 Các thành phần cơ bản của hệ thốngBa thành phần cơ bản là thiết bị đo,thiết bị chấp hành và thiết bị điều khiển.DSC là giải pháp điều khiển số tích hợp có cấu trúc phân tán được sử dụng rất rộng rãi trong các hệ thống điều khiển quá trình
Tín hiệu Biến điều Biến cần Giá trị đặt điều khiển khiển điều khiển
(SP) (CO) (MV) (CV)
Tín hiệu đo Đại lượng đo(PM) (PV)
Thuật ngữ:Giá trị đặt Set Point(SP), Set Value (SV)Tín hiệu điều khiển Control Signal, Controller Output (CO)Biến điều khiển Control Variable,Manipulated Variable (MV)Biến được điều khiển Control Variable (CV)Đại lượng đo Measured Variable,Process Value (PV)Tín hiệu đo Measured Signal, Process Measurement (PM)
Các thành phần cơ bản của mọt hệ thống điều khiển quá trình+)Thiết bị đo:Chức năng của một thiết bị đo là cung cấp một tín hiệu ra tỷ lệ theo một ý nghĩa nào đó với đại lượng đo.Một bộ chuyển đổi đo chuẩn là một bộ chuyển đổi đo mà cho đầu ra là một tín hiệu chuẩn ,trong các hệ thống điều khiển quá trình truyền thống thì tín hiệu 4-20mA là thông dụng nhất+)Thiết bị điều khiển :là một thiết bbi tự động thực hiện chức năng điều khiển là thành phần cốt lõi của một hệ thống điều khiển công nghiệp.Trên cơ sở các tín hiệu đo và một cấu trúc điều khiển/sách lược điều khiển được lựa chọn,bộ điều khiển thực hiện thuật toán điều khiển và đưa ra các tín hiệu điều khiển để can thiệp trở lại quá trình kỹ thuật thông qua các thiết bị chấp hành.Tùy theo dạng thiết bị vào ra phương pháp thể hiện luật
Đặng văn tùng k53_ lọc hóa dầu
Bộ Điều Khiển
Thiết Bị Chấp Hành
Quá Trình Công Nghệ
Thiết bị đo

điều khiển có thể được xếp loại là thiết bị điều khiển tương tự,thiết bị điều khiển logic hoặc thiết bị điều khiển số+)Thiết bị chấp hành:một hệ thống thiết bị chấp hànhnhận tín hiệu ra từ bộ điều khiển và thực hiện động tác can thiệp tới biến điều khiển.Các thiêt bị chấp hành tiêu biểu trong công nghiệp là van điều khiển,động cơ,máy bơm và quạt gió.Một thiết bị chấp hành công nghiệp bao gồm hai thành phần cơ bản là cơ cấu chấp hành hay cơ cấu dẫn động và phần tử điều khiển
2.5 Mô tả chức năng hệ thống- Các tài liệu mô tả đồ họa
+)Lưu đồ công nghệ+)Lưu đò ống dẫn và thiết bị+)Sơ đồ khóa liên động+)Biểu đồ trình tự
- Lưu đồ P&ID:có ý nghĩa hết sức quan trọng trong mô tả các chức năng và thiết bị một hệ thống, là cơ sở cho việc phân tích và thiết kế hệ thống.Các lưu đồ P&ID trong thực tế có thể phức tạp hoặc đơn giản tùy theo yêu cầu và mục đích đặt ra.Nếu mục đích đặt ra là lựa chọn thiết bị,phát triển phần mềm,cài đặt và đưa vào vận hành thì ta cần bản lưu đồ chi tiết.
Chỉ Thị (Indication) và điều khiển (Control) chênh áp (Differential Pressure),mạch vòng 103
P D I C -103Chữ cái đầu:Biến đo hoặc khởi tạoChữ cái phụ:Bổ xung cho chữ cái đầuChữ cái sau:Chức năng chỉ thị,chức năng bị động hoặc đầu raMã số mạch vòng,điểm đo
3. Nhận biết các biến quá trìnhCác biến quá trình bao gồm biến cần điều khiển ,biến điều khiển và nhiễu.Hầu hết các biến quá trình có thể đuọc xếp vào 1 trong hai loại là biến dòng chảy hoặc biến trạng thái.Một biến trạng thái mô tả thể trạng vật chất hoặc năng lượng của quá trình trong từng pha.Một
Đặng văn tùng k53_ lọc hóa dầu

biến dòng chảy mổ tả sự thay đổi,vận chuyển,trao đổi vật chất hoặc năng lượngtrong một khu vực,giữa các địa điểm,giữa các vật hoặc giữa các pha
4. Các sách lược điều khiển cơ sở4.1 Điều khiển truyền thẳng
Giá trị biến điều khiển được tính toán dựa vào các biến nhiễu,vì thế sách lược điều khiển ở đây còn được gọi là bù nhiễuƯu điểm:tác động nhanh,cho phếp loại nỏ đáng kể ảnh hưởng của nhiễu,không làm mất tính ổn định của một quá trình ổn định.Nhược điểm:không đảm bảo được đầy đủ chất lượng mong muốn của quá trình điều khiển.
4.2 Điều khiển phản hồi:dựa trên nguyên tắc liên tục đo giá trị biến được điều khiển và phản hồi thông tin về bộ điều khiển tính toán lại giá trị của biến điều khiển.Trong các sách lược điều khiển,điều khiển phản hồi đóng vai trò quan trọng hàng đầu.+)Điều khiển phản hồi kết hợp với điều khiển truyền thẳng:tận dụng những ưu điểm và khắc phục những nhược điểm của mỗi sách lược
4.3 Điều khiển tỷ lệ:là duy trì tỉ lệ giữa hai biến tại một giá trị đặt nhằm gián tiếp điều khiển một biến thứ ba+)Bản chất và ý nghĩa của điều khiển tỷ lệ:có thể được thực hiện 1 trong 2 cấu hình.Nếu chỉ phân tích bên trong hai cấu hình này,ta sẽ có hai cách nhìn nhận khác nhau.Trong một số trường hợp,nó có thể được thực thi một cách đơn giản hơn với việc sử van trộn ba cửa.Tóm lại,nhìn tổng thể theo mục đích điều khiển thì điều khiển tỷ lệ là trường hợp đặc biệt của điều khiển truyền thẳng,trong đó các biến nhiễu được đo và bù theo nguyên tắc tỷ lệ.Quan hệ giữa biến được điều khiển và biến cần điều khiển thường là tuyến tính.Hai ý nghĩa quan trọng của điều khiển tỷ lệ là:Một,giúp giải quyết hiệu quả một loạt các bài toán phi tuyến,thay vì phải tuyến tính hóa xấp xỉ mô hình hoặc sử dụng các phương pháp thiết kế bộ điều khiển phi tuyến phức tạp.Hai,trong nhiều trường hợp,giúp cho việc thiết kế cấu trúc điều khiển đơn biến cho một quá trình đa biến được đơn giản hơn,trong đó sự tương tác chéo giữa một vòng điều khiển được giảm thiểu+)Điều khiển tỷ lệ kết hợp với điều khiển phản hồi:trong hai cấu hình cơ bản cảu điều khiển tỉ lệ,thực rat a cũng đã thấy vai trò cảu điều khiển phản hồi.Tuy nhiên,nếu xét theo mực đích điều khiển chính thì điều khiển tỷ lệ vẫn chỉ là một dạng cảu điều khiển truyền thẳng
4.4 Điều khiển tầng:là một cấu trúc mở rộng của điều khiển phản hồi vòng đơn.Điều khiển tầng giúp loại bỏ ảnh hưởng cảu một dạng nhiễu và cải thiện rõ rệt đặc tính động học của hệ thống.Tư tưởng chính cảu điều khiển tầng là phân cấp điều khiển nhằm loại bỏ ảnh hưởng của nhiễu ngay tại nơi nó phát sinh+)Hai cấu trúc điều khiển tầng+)Điều khiển vị trí van+)Ứng dụng của điều khiển tầng Cải thiện khả năng loại bỏ nhiễu cục bộ Giảm độ quá điều chỉnh
Đặng văn tùng k53_ lọc hóa dầu

Cải thiện tính ổn định của toàn hệ kín Nâng cao tính bền vững của hệ kín
4.5 Điều khiển suy diễn:dựa trên hai phương pháp:+)Sử dụng một mô hình toán học hoặc một mô hình suy diễn để tính toán,suy diễn giá trị biến cần điều khiển từ một số đại lượng đo được khác,suy diễn này còn gọi là cảm biến mềm+)Lụa chọn một biến trung gian để điều khiển hơn có quan hệ mật thiết với biến cần điều khiển,sao cho từ giá trị biến trung gian này ta có thể suy ra giá trị gần đúng của biến cần điều khiển
4.6 Điều khiển lựa chọn:là các sách lược điều khiển có sử dụng khâu chọn tín hiệu Tùy theo đặc thù cũng như chức năng của khâu chọn tín hiệu phân biệt hai dạng điều khiển lựa chọn sau đây:+)Điều khiển lấn át:hệ thống có hai hoặc nhiều vòng điều khiển tương ứng với hai hoặc nhiều biến cần điều khiển.Hai hoặc nhiều bộ điều khiển cùng hoạt động,nhưng đầu ra của một bộ điều khiển được lựa chọn+)Điều khiển giới hạn:hệ thống chỉ có một bộ điều khiển nhưng hai hoặc nhiều biến cần điều khiển.Khâu chọn tín hiệu quyết định đầu vào cho bộ điều khiển phụ thuộc vào các giá trị đo được dù chọn giá trị nhỏ nhất lớn nhất
4.7 Điều khiển lấn át là một dạng đặc biệt của điều khiển lựa chọn,trong đó một bộ điều khiển có thể giành quyền can thiệp vào biến điều khiển cảu một bộ điều khiển khác khi có nguy cơ xảy ra tình trang vượt ngưỡng cũng như vi phạm các điều kiện rang buộc của quá trình hoặc thiết bị
4.8 Điều khiển giới hạn:cũng được ứng dụng chủ yếu cho mục đích an toàn hệ thống4.9 Điều khiển phân vùng là một sách lược điều khiển được áp dụng khi hệ thống có một biến
cần điều khiển nhưng có nhiều biến điều khiển,trong đó mỗi biến điều khiển coa ảnh hưởng thống nhất trong một phạm vi riêng. Mục đích chính của điều khiển phân vùng là sử dụng phân hợp một cách tối ưu các thiết bị chấp hành,giảm thiểu chi phí điều khiển,đồng thời góp phần cải thiện tốc độ và chất lượng đáp ứng cảu hệ thống
5. Đặc tính các thành phần hệ thống5.1 Thiết bị đo:
+)Cấu trúc cơ bản:một thiết bị đo quá trình có nhiệm vụ cung cấp thông tin về diễn biến cảu quá trình kỹ thuật và cho đầu ra là một tín hiệu chuẩn.Thành phần cốt lõi của một thiết bị đo là cảm biến.Một cảm biến có thể bao gồm một vài phần tử cảm biến,trong đó mỗi phần tử cảm biến lại là một bộ chuyển đổi-từ một đại lượng này sang một đại lượng khác để dễ sử lý hơn.Một bộ chuyển đổi đo chuẩn đóng vai trò là một khâu điều hòa tín hiệu.Chất lượng và khả năng ứng dụng của một thiết bị đo phụ thuộc vào nhiều yếu tố mà ta khái quát là các đặc tính thiết bị đo,bao gồm:đặc tính vận hành,đặc tính tĩnh và đặc tính động học.+)Đặc tính vận hành:gồm phạm vi đo và dải đo.Phạm vi đo là phạm vi giá trị danh định của đại lượng đo mà một thiết bị đo được sử dụng theo quy định,giới han dưới còn gọi là
Đặng văn tùng k53_ lọc hóa dầu

điểm không.Dải đo được định nghĩa là khoảng cách giữa giới hạn trên và giới hạn dưới của phạm vi đo+)Độ phân giải:của thiết bị đo được định nghĩa là một bước thay đổi của tín hiệu ra+)Độ tin cậy là xác suất thiết bị đó hoạt động tốt qua một khoảng thời gian trong một số điều kiện quy định chuẩn.Độ lệch hay độ trôi là một thay đổi không mong muốn qua một thời gian làm việc quy định.Trôi điểm không là sự thay đổi tín hiệu đầu ra của thiết bị đo được giữ cố định tai điểm không.Lệch độ nhay là sự thay đổi độ nhạy của một thiết bị đo qua một khoảng thời gian quy định+)Tác động của môi trường
5.2 Thiết bị chấp hành và van điều khiển Một hệ thống/thiết bị chấp hành có chức năng can thiệp tới biến điều khiển theo tín hiệu đầu ra của bộ điều khiển theo tín hiệu đầu ra của bộ điều khiển.Thành phần can thiệp trực tiếp tới biến điều khiển được gọi là phần tử điều khiển.Phần tử điều khiển được truyền năng lượng,truyền động từ cơ cấu chấp hành.+)Cấu trúc cơ bản của van điều khiển:Một van điều khiển bao gồm thân van được ghép nối với một cơ chế chấp hành cùng với các phụ kiện liên quan.Ta có thể phân loiạ van dựa theo thiết kế và kiểu chuyển động của chốt van như sau: Van cầu:Chốt trượt có đầu hình cầu hoặc hình nón,chuyển động lên xuống Van nút:Chốt xoay hình trụ hoặc một phần hình trụ Van bi:Chốt xoay hình cầu hoặc một phần hình cầu Van bướm:chốt xoay hình đĩa+)Ta có thể phân loại van dựa theo cơ chế truyền động như: Van khí nén:loại phổ biến nhất,truyền động khí nén sử dụng màng chắn lo so hoặc pittong Van điện:được sử dụng trong những ứng dụng công suất nhỏ đòi hỏi độ chính xác cao Van thủy lực:cơ chế chấp hành sử dụng hệ thống bơm kết hợp với màng chắn hoặc pittong,được sử dụng cho các ứng dụng công suất lớn Van từ: cơ chế chấp hành cuộn hút kết hợp lò xo,lực nén yếu và độ chính xác kém,chỉ phù hợp với cá bài toán đơn giản.
6. Thiết lập sơ đồ chức năng đo và điều khiển các quá trình công nghệ6.1 Một số định nghĩa
+)Điểm đo-là điểm thuộc đối tượng công nghệ,tại đó đang thực hiện hoặc có thể đã thực hiện phép đo.+)Khí cụ đo-là cơ cấu hoặc tổ hợp các cơ cấu,trực tiếp hay gián tiếp được sử dụng để đo,phản ánh và điều khiển một thông số biến đổi nào đó.Khái niệm này không liên quan đến các phân tử bên trong của khí cụ như các điện trở hoặc ống xếp đàn hồi của các đồng hồ thứ cấp.+)Khí cụ lắp đặt trên tủ điều khiển+)Khí cụ lắp đặt tại chỗ+)Thiết bị chấp hành:bao gồm cơ cấu chấp hành và cơ cấu điều chỉnh
Đặng văn tùng k53_ lọc hóa dầu

+)Cơ cấu chấp hành:phần của thiết bị chấp hành,để có tác động định hướng vào cơ cấu điều chỉnh+)Cơ cấu điều chỉnh:phần cảu thiết bị chấp hành để trực tiếp xác định giá trị của biến số điều chỉnh+)Thiết bị cảnh báo báo động+)Giá trị đặt:giá trị của biến số điều chỉnh mà bộ điều chỉnh được điều hưởng
6.2 Hình dáng và kích thước của ký hiệu quy ước+)Khí cụ đo:ký hiệu quy ước của khí cụ bao gồm:đường tròn với đường kính gần 10mm,mã chữ nêu biến số đo và chức năng thực hiện của khí cụ
+)Khí cụ lắp đặt trên tủ điều khiển:là đường tròn mảnh với đường kính khoảng 10mm,có đường vạch ngang mảnh.Đường vạch này có thể kể bên trong đường tròn ở độ cao tùy ý
+)Cơ cấu điều chỉnh:là tam giác đều với độ dài cạnh gần 5mm
+Cơ cấu chấp hành Cơ cấu chấp hành hệ điều chỉnh tự động:đường tròn nét mảnh với đường kính gần 5mm,nối với cơ cấu chấp hành cơ cấu điều chỉnh bằng đường mảnh.
Cơ cấu chấp hành với tay điều khiển,hoạt động trong hệ điều chỉnh tự động:bên trong đường tròn ký hiệu quy ước cần viết chữ H
Cơ cấu điều khiển thủ công:ký hiệu quy ước là nửa đường tròn mảnh với đường kính gần 5mm,phía trên nửa 3 hình tròn ghi chữ H
Đặng văn tùng k53_ lọc hóa dầu
TIC
I-1
H

+)Thiết bị chấp hành:
+)Hành vi của cơ cấu chấp hành trong trường hợp sự cố mất nguồn năng lượng được mô tả bổ xung bằng ký hiệu
6.3 Mã chữ
1 2 3 4Chữ thứ nhất Ý nghĩa bổ xung Dạng mô tả thông tin
hoặc chức năng của tín hiệu ra
a Cảnh báo,báo độngbc Điều chỉnh,điều
khiểnd Mật độ Sai lệche Tất cả các biến số
điệnf Lưu lượng Tương quang Đo vị trí hoặc đọ dài
không định hướngh Tác động thủ côngi Chỉ thịj Tự động chuyển
mạchk Thời gian hoặc là
chương trình đặt theo thời gian
l Mứcm Hàm lượng nước
hoặc độ ẩmn Tùy theo ý của
người sử dụngo Tùy theo ý của
người sử dụngp Áp suất hoặc là chân
khôngq Chất lượng Tích lũy hoặc tính
tổngPhép tích phân hoặc
tính tổngr Tính phóng xạ Ghis Vận tốc hoặc tần sốt Nhiệt độu Một số biến không
đồng nhất
Đặng văn tùng k53_ lọc hóa dầu

v Độ nhớtw Trọng lượng hoặc
lựcx Những biến số khácy Tùy theo ý người sử
dụngz Bảo vệ sự cố hoặc tác
động an toàn
6.4 Ví dụ ứng dụng các ký hiệu cơ bản+)Khí cụ đo lưu lượng,chỉ thị lắp đặt tại chỗ
+)Khí cụ đo chênh áp,ghi và lắp đặt
+)Các cảm biến không thang chia độ,truyền tín hiệu đi xa
Đặng văn tùng k53_ lọc hóa dầu
FI
PDR
PT

Đặng văn tùng k53_ lọc hóa dầu