-
8/8/2019 Bai2-4-6
1/7
Copyright 2006 Hi u
2.4.6 Solving ODEs with MATLAB/Simulink Software
MATLAB/Simulink software provides with very good tools to solve
ordinary differentialequations. You can solve ODEs by your own
codes (M-files) using the above-mentionednumerical methods, MATLAB
built-in functions (solvers) or Simulink. The simulationtechniques
in Simulink was also designed based on the above mentioned
numerical methods.The following examples illustrate how to solve
differential equations usingMATLAB/Simulink software in different
ways.
3.5.1 Programming in MATLAB
Example 3.16 Sovling 2nd order ODE by MATLAB using the modified
Eulers method
A dynamic system is represented by the following differential
equation:
u7y7y2y =
where y is output and u is input. It is assumed that all initial
conditions are zero. Find thesystem response when a unit step input
is applied.
SOLUTION
Using the modified Eulers method, sample M-files are as
follows:
% Example0316Sim.m % This program is to illustrate how to solve
a second-order ODE % by MATLAB (using the modified Euler's method).
%
% Made by Hung Nguyen in January 2006 % Last modified on 19th
Jan 2006. This program is for the unit: % Marine and Offshore
Systems Simulation and Diagnostics, BE (MOS). % Copyright(C) 2006
Hung Nguyen. %
clear
% initial conditions:
x = [0 0]'; h = 0.01; N = 10; u = 1; % unit step function index
= 0;
for ii = 0:h:N
index = index + 1;
% Modified Euler's method
[k1,y] = Example0316(x,u,ii); [k2,y] =
Example0316(x+0.5*h*k1,u,ii); x = x + h*k2;
-
8/8/2019 Bai2-4-6
2/7
Copyright 2006 Hi u
% Store computed data in the matrix data:
data(index,1) = ii; % Time (seconds) data(index,2) = x(1); %
Response data(index,3) = x(2); % Response rate
end
% Plots:% Response: subplot(211); plot(data(:,1),data(:,2));
xlabel( 'Time (seconds)' ); ylabel( 'Response y' ); grid
% Response rate: subplot(212); plot(data(:,1),data(:,3));
xlabel( 'Time (seconds)' ); ylabel( 'Response rate y-dot' );
grid
% Example0316.m%% State vector x = [x1 x2]' % u = input % t =
time
function [x_dot,y] = Example0316(x,u,t)
% Physical constants:
a = 1.0; b = 2.0; c = 7.0; d = 7.0;
% State space model: A = [0 1;-c/a -b/a]; B = [0 d/a]'; C = [1
0];
x_dot = A*x + B*u; y = C*x;
% End of function Example0216
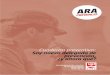
Running this simulation program, we have the following results
as shown in Figure 3.17.
-
8/8/2019 Bai2-4-6
3/7
Copyright 2006 Hi u
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
Time (seconds)
R e s p o n s e y
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
Time (seconds)
R e s p o n s e r a
t e y - d o
t
Figure 17 Simulated results for Example 3.16 using the modified
Eulers method
3.5.2 Using Solvers in MATLAB
MATLAB provides a number of built-in functions (called sovlvers)
that can be used to solveODEs. They are ode23, ode45, ode113,
ode15s, ode23s, ode23t, ode23tb. Readers can finddetailed
descriptions of these built-in functions by typing the command help
function_namein the MATLAB Command windows.
Example 3.17 Solving 2nd order ODE by using a solver (ode45) in
MATLAB
Lets reconsider the equation in Example 3.16. A dynamic system
is represented by thefollowing differential equation:
u7y7y2y =
where y is output and u is input. It is assumed that all initial
conditions are zero. Find thesystem response when a unit step input
is applied.
SOLUTION
Using MATLAB solver (ode45) we have the following sample
M-files:
% Example0317.m % Second Order Differential Equation: %
y_dot_dot + 2*y_dot + 7*y = 7*u
-
8/8/2019 Bai2-4-6
4/7
Copyright 2006 Hi u
function y_dot = Example0317(t,y)
u = 1; % input
y_dot = [y(2); -2*y(2)-7*y(1) + 7*u];
% End of Example0317.m
% Example0317Sim.m:
clear
[T,Y] = ode45( 'Example0317' ,[0 10],[0 0]);
%plot(T,Y(:,1),T,Y(:,2));grid %xlabel('Time (seconds)');
%ylabel('Response and rate')
% Plots:% Response: subplot(211); plot(T,Y(:,1)); xlabel( 'Time
(seconds)' ); ylabel( 'Response y' ); grid
% Response rate: subplot(212); plot(T,Y(:,2)); xlabel( 'Time
(seconds)' ); ylabel( 'Response rate y-dot' ); grid
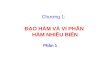
Running this program, we obtain the following results in Figure
3.18. Readers may comparethe results with the above results solved
by uing the modified Eulers method (see Figure3.17).
-
8/8/2019 Bai2-4-6
5/7
Copyright 2006 Hi u
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
Time (seconds)
R e s p o n s e y
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
Time (seconds)
R e s p o n s e r a
t e y - d o
t
Figure 3.18 Simulated results using solver ode45
3.5.3 Using Simulink
Example 3.18 Solving ODEs using Simulink
Lets reconsider the differential equation in Example 16. We will
use Simulink to solve thisequation.
SOLUTION
The Simulink model can be created as shown in Figure 3.19. In
order to display computedresults, Simulink library provides a
number of blocks (in Sinks): Scope block, Display block,To
Workspace block, etc.
After running the Simulink model, user can save computed data in
the Workspace using thesave command in the MATLAB Command Window.
The saved data can be retrieved byusing the load command.
Before running the Simulink model, a solver can be selected as
shown in Figure 3.20(Simulation menu Configuration Parameters).
The initial conditions for the differential equation can be set
by double-clicking the Integrator block.
-
8/8/2019 Bai2-4-6
6/7
Copyright 2006 Hi u
Figure 3.19 Simulink model for Example 17
Figure 3.20 Selection of solver (ode45)Running this Simulink
model, we obtain the following results.
-
8/8/2019 Bai2-4-6
7/7
Copyright 2006 Hi u
Figure 3.21 The Scope block can be used to display computed
results
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
Time (seconds)
R e s p o n s e y
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
Time (seconds)
R e s p o n s e r a
t e y - d o
t
Figure 3.22 Simulated results using Simulink and ode45
solver