Embed Size (px)
Citation preview

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 1/19
NỘI DUNG BÁO CÁO THU HOẠCH
1. Giới thiệu về hệ thống cơ điện tử được thực hành kiến tập
- Tổng quan về cơ điện tử
- Hệ thống sản xuất linh hoạt FMS
- Hệ thống robot công nghiệp
2. Nêu các đặc điểm cơ bản của hệ thống
- Cấu tạo.
- Nguyên lý hoạt động của hệ thống
- Phạm vi ứng dụng của hệ thống
3. Phân tích các tính năng và thành phần cơ bản hợp thành hệ
thống
- Hệ thống cơ khí,
- Hệ thống điện-điện tử
- Hệ thống thủy lực-khí nén
- Hệ thống điều khiển
- Hệ thống thông tin-giám sát (sensor…)
- …
4. Các bước vận hành hệ thống
5. Kết luận

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 2/19
PHẦN MƠ DẦU
GIƠI THIÊU HÊ THỐ NG ROBOT CÔNG NGHIỆP VÀ HÊ
THỐ NG SẢ N XUẤT LINH HOẠT FMS
I. TÔNG QUAN VÊ CƠ ĐIÊN TƯ
Cơ điện tử(Mechatronics) là một kịch bản tự nhiên trong quá trình phát triển của kỹ
thuật hiện đại. Sự phát triển của máy tính, và sau đó là máy tính siêu nhỏ, máy tính tích h
công nghệ thông tin, kỹ thuật phần mềm, đã buộc cơ điện tử phải phát triển như một yêu
cấp thiết vào những năm cuối của thế kỷ 20. Đứng trước ngưỡng cửa của thế kỷ 21, với s
mong chờ những tiến bộ trong các hệ Cơ - điện - Sinh học, máy tính lượng tử, hệ thống p
và nano, và những công nghệ khác đang triển khai. Tương lai của cơ điện tử là đầy tiềmnăng.

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 3/19
Định nghĩa cơ điện tử đã bắt đầu được quan tâm kể từ khi định nghĩa ban đầu được
đưa ra bởi công ty điện Yasakawa. Trong các tài liệu thương mại, Yasakawa đã định ngh
cơ điện tử như sau:
Từ "mechatronics" được tạo ra bởi "mecha" trong từ mechanism(có nghĩa là cơ cấu)
"tronics" trong từ electronics(có nghĩa là điện tử). Nói cách khác công nghệ và các sản p
được phát triển sẽ được kết hợp nhiều phần điện tử và cơ khí ở mức độ tích hợp rất cao,
không thể nói đâu là điểm bắt đầu và đâu là điểm kết thúc, không có một ranh giới rõ ràn
Định nghĩa tiếp theo về cơ điện tử được tiếp tục phát triển sau khi Yasakawa đưa ra đ
nghĩa đầu tiên. Một trong những định nghĩa cơ điện tử được trích dẫn phát triển bởi
Harashima, Tomizuka và Fukada vào năm 1996. Trong đó cơ điện tử được định nghĩa là
tích hợp của cơ khí, điện tử và điều khiển máy tính thông minh trong một thiết kế, chế tạ
các sản phẩm và quy trình công nghiệp.
Trong cùng năm, một định nghĩa khác được đưa ra bởi Auslander và Kempf: Cơ điệ
tử là sự áp dụng tổng hợp các quyết định tạo nên hoạt động của các hệ thống vật lý.
Tiếp tục một định nghĩa khác xuất hiện năm 1997 của Shetty và Kolk: Cơ điện tử làmột phương pháp tư duy dùng cho việc thiết kế tối ưu các sản phẩm cơ điện.
Gần đây, W.Bolton định nghĩa: Một hệ cơ điện tử không chỉ là một sự kết hợp giữa
khí và điện tử, và cũng không đơn thuần là một hệ thống điều khiển, nó là một sự kết hợp
toàn diện giữa tất cả chúng lại với nhau.
Tất cả những định nghĩa và phát biểu trên về cơ điện tử đều xác đáng và giàu thông

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 4/19
tuy nhiên bản thân chúng nếu đứng riêng lẻ lại không định nghĩa được đầy đủ thuật ngữ
điện tử.
Sự phát triển và tính nổi trội của cơ điện tử tạo cho các sản phẩm và hệ thống thực hiện t
hơn ,linh hoạt hơn,thông minh hơn trong chức năng và cả trong khả năng vận chuyển, gia
tiếp truyền thống.ngày nay đã xuất hiên. Ngày nay cơ điện tử được ứng rất nhiều trong sản
xuất công nghiệp cũng như nhiều lĩnh vức khác.Các sản phẩn cơ điện tử điển hình
như:robotics,hệ thống sản xuất linh hoạt FMS có tích hợp CIM,máy công cụ CNC,hệ vi cơ
điện tử…đã tạo nên một nền công nghiệp hiện đại.
Trong khuôn khổ bài báo cáo kiến tập tôi xin giới thiệu về 2 sản phẩm của cơ điện tử là
hệ thống Robot hàn OTC Daihen AII-V6 ” và “ trạm phân phối vật gia công”
II. HỆ THỐNG ROBOT CÔNG NGHIỆP
Robot công nghiệp là cơ cấu chuyển động tự do có thể lập trình lại bằng các chươn
trình,tổng hợp các chương trình đặt ra trên các tọa độ ;có khả năng định vị định hướng
chuyển các đối tương vật chất :chi tiết .dao cụ.gá lắp… theo những hành trình thây đổ
chương trình hóa nhắm thực hiện các nhiệm vụ công nghệ khác nhau.
OTC Daihen AII-V6 là robot hàn của công ti OTC Daihen Nhật Bản,một công ti
chuyên sản xuất các thiết bị hàn,thiết bị cắt,robot hàn công nghiệp có độ chính xác c
Dòng Robot OTC Daihen AII-V6 được trang bị bộ điều khiển AX21, sử dụng cho các
dụng hàn TIG/MIG/MAG/CO2 và các ứng dụng cắt Plasma.
III. HỆ THỐNG SẢN XUẤT LINH HOẠT FMS
Trong nền công nghiêp hóa hiên đại hóa hiên nay, công nghê sản xuất đã phát triển
mạnh.môt thành phần không thể thiếu của nền công nhiêp này là hê thống sản xuất linh ho
FMS
Hê thống sản xuất linh hoạt FMS(Flexible Manufacturing System) là hê thống đưsản xuất được điều kiển tự đông bằng máy tính,có khả năng thay đổi chươnh trình điều kiể
và sản phẩm môt cách linh hoạt trong quá trình sản xuất.
Bên cạnh khái niêm FMS còn có khái niêm sản xuât có sự trợ giúp của máy tính
CIM(Computer Integrated Manufacturing) được sử đụng để mô tả môt phương thức sản x
hiên đại.Măc dù CIM chứa nhiều công nghê sản xuất tiên tiến như

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 5/19
CAD/CAM/CNC/ROBOT…nhưng nó được hiểu với cái nghĩa là công nghê mới hơn là m
khái niêm mới.
Trong bài báo cáo này tôi xin trình bày về mô hình “TRA M PHÂN PHÔ I VÂT GIA CÔN
Môt mô hình thể hiên phần nào của hê thống sản xuất linh hoạt FMS.Mô hình này được sả
xuất bởi công ti “TNHH đầu tư phát triển công nghệ điện tử tự động hoá DK”.
PHẦN I
ĐẶC ĐIỂM CƠ BẢN CỦA HỆ THỐNG ROBOT CÔNG NGHIỆP
VÀ HỆ THỐNG SẢN XUẤT LINH HOẠT FMS
A. ROBOT CÔNG NGHIỆP

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 6/19
I. CẤU TẠO HỆ THỐNG
Hệ thống cơ bản gồm 3 phần:1. Cánh tay robot (Manipulator)
Cơ cấu cơ khí ROBOT gồm 6 khâu động 6 khớp tạo ra một cơ cấu có 6 bật tự do
6 khớp là 6 động cơ servo với các kích thước và công suất khác nhau.
2. Bộ điều khiển AX21 (Controller AX21)
Manipulator
Controller AX21
Operation Box
Teach pendant

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 7/19
Bộ điều khiển gồm hộp cpu AX21 với các cổng ra là hộp điều kiển bằng tay (Teach pend
và hộp thuật toán (Operation Box).

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 8/19
3. Thiết bị hàn hồ quang
Thiết bị hàn bao gồm: súng hàn đươc gắn vào khâu cuối của cánh tay robot,bộ phận
khiển khí hàn, nguồn hàn DTC-DM350 ,bình khí hàn và hệ thống đây hàn.
II. NGUYÊN LÍ HOẠT ĐÔNG CỦA HỆ THỐNG
Dầu tiên,hệ thống sẽ nhận được các lệnh diều khiển từ hộp điều kiển bằng tay và hộ
thuật toán,cpu sẽ nhận lệnh đó và xử lí nó.Sau đó đưa ra các lệnh điều kiển các động cơ
servo và hệ thống hàn để có được một đường hàn theo ý muốn.các động cơ servo được
khiển các góc quay rất chính xác,sự kết hợp đồng thời của các động cơ đó sẽ tạo cho qu
đạo chuyển động của dầu súng hàn được theo ý muốn.
III. PHẠM VI ỨNG DỤNG CỦA HỆ THỐNG
Ngày nay robot công nghiệp được ứng dụng rất rỗng rãi, đặc biệt là trong nền cnhiệp sản xuất sản phẩm tiêu dùng.Theo thông kê cho thấy robot công nghiệp chủ yếu
robot hàn và robot lắp ráp,trong đó robot hàn chiếm 25%,robot lắp ráp chiếm 33% dâ
robot trên thế giới .Hệ thống Robot hàn OTC Daihen AII-V6 được ứng dụng trong hà
TIG/MIG/MAG/CO2 và các ứng dụng cắt Plasma,ngoài ra hệ thống có thể được ứng
dụng để nâng các đồ vật. OTC Daihen AII-V6 có thể được trang bị cho dây chuyền sả
xuất oto,xe máy,các sản phẩm cơ khí… tự động .Với đặc thù của công việc hàn là rấtnguy hiểm,độc hại và đòi hỏi sự chính xác cao nên robot hàn là một giải pháp thay thế
cần thiết cho việc hàn thủ công.
B. HÊ THÔNG SAN XUÂT LINH HOAT FMS
I. CẤU TẠO HỆ THỐNG
Hê thống trạm phân phối vât gia công bao gồm:
1.Các thiết bị vân chuyển và tháo lắp chi tiết gồm thống gồm 2 băng tải truyền ,1 vành
xoay tròn có các rãnh trụ để chứa vât gia công,1 cánh tay robot gắp các vât gia công v
thống pitong đẩy các vân gia công.
2.Máy công cụ gồm 3 máy gia công máy khoa vât gia công,máy tiên và máy phay.
3. Hê thông đồ gá:do chỉ dừng lại ở mô hình nên hê thống không có đồ gá để kep chi tiế
mà thay vào đó là các rãnh trụ trên vành xoay dể giữ các vât gia công
4. Các thiết bị cắt gồm các mũi khoan,dao phay hay dao tiên.
5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 9/19
5.hê thống các máy tính ,hê điều kiển PLC và cảm biến.
II. NGUYÊN LÍ HOẠT ĐÔNG CỦA HỆ THỐNG
Khi hê thống khởi đông các băng tải hoạt đông.Pitong đầu tiên sẽ hoạt đông và đ
vât gia công vào băng tải 1,băng tải 1 đưa vât gia công vào vành quay để gia công.T
đường di chuyển trên băng tải có 1 sensors màu,sensors này sẽ gửi tính chất của vât
công đó về bô xử lí trung tâm.Sau đó bô xử lí trung tâm sẽ đưa ra lênh để diều khiển
bàn xoay tới vị khí máy gia công cần thiết cho vât gia công đó,qua các lênh của cpu
máy công cụ sẽ gia công thêo tính chất của vât gia công.Sau khi gia công,bàn xoay
đưa vât gia công đến vị trí robot và robot gắ p vât gia công rồi nha vào băng truyền
2.Trên băng truyền 2 có 3 sensors và dưới 3 sensors có 3 pitong đẩy vât gia công xu
buồng chứa sản phẩm.Khi vât gia công đi qua sensors thứ nhât là sensors màu,hê bătruyền sẽ dừng lại,sensors tiến hành kiểm tra tính chất của vât gia công và gửi về cp
cpu xử lí tín hiêu vât gia công rồi đưa ra tinh chất của vât gia công.Sau đó nếu vât g
công thỏa mãn tính chất nào đó thì cpu sẽ ra lênh cho pitong đẩy vât gia công xuốn
buồng sản phẩm,nếu không thì hê thông băng truyền se tiếp tục hoạt đông và đến c
sensors sau.Sau quá trình như thế hê thống sẽ gia công được sản phẩn và tiến hành
phân loại no theo tính chất.
III. PHAM VI ỨNG DỤNG CỦA HÊ THỐNG
Hê thống có thể được á p dụng cho dây chuyền gia công các sản phâm có tính c
khác nhau và phân loại các sản phẩm đó.Đây chỉ là mô hình nhưng về cơ bản thì nó
nguyên lí cũng như các thành phần hoàn toàn tương tự như dây chuyền sản xuất thự
tế.

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 10/19
PHẦN III
PHÂN TÍCH CÁC TÍNH NĂNG VÀ THÀNH PHẦN CƠ BẢN CỦA
THỐNG
A.HỆ THỐNG ROBOT CÔNG NGHIỆPI. HỆ THỐNG CƠ KHÍ 1
2
3
Hê thống cơ khí đơn giản chỉ gồm 6 khâu đông,1 khâu cứng và 6 khớp (hình vẽ).khâu
cứng (khâu 3) là phần được gắn trược tiếp vào nền và khâu này không di chuyển.vị trí khớ
là vị trí nối khâu cuối của robot và trên khâu cuối này được gắn súng hàn.toàn bô cơ cấu h
đông sẽ định vị cho đầu súng hàn di chuyển theo môt quy đạo xác định,qua đó có thể tạo r
các đường hàn theo mong muốn.vị trí 1 dể gắn bô điều chỉnh hàn và bô phân này là bô ph
trung gian được nối với súng hàn ,nguồn hàn và cpu.
6 khâu động của cánh
tay,1 khâu chưa lắp chính
khâu lắp súng hàn
6 khớp là động 6
cơservo

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 11/19
Kích thước các khâu và giới hạn không gian làm viêc của cơ cấu robot:
Chiếu bằng
Qua hình ta thấy được giới hạn giới hạn của điểm hàn trên măt phăng ngang là
đường cong P-point Working Range.trong đó bán kính đường tròn lớn là 1402 mm,đường
tròn nhỏ là 399mm và góc quay giới hạn la -170 +170 .

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 12/19
Kích thước chiếu đứng
Cũng tương tự với chiếu bằng ta có giới hạn giới hạn của điểm hàn trên măt phăn
đứng là đường cong P-point Working Range trên hình vẽ.
II. HÊ THỐNG ĐIÊN –ĐIÊN TƯ
Hê thống điên-diên tử bao gồm hê thống xử lí cpu AX21,hôp điều kiển bằng tay,bô nạ p
chương trình,các đông cơ servo tạo chuyển đông cho cơ cấu,bô điều khiển nguồn hàn DT
DM350 ,hê thống điều kiển súng hàn và khí hàn cùng với các dây nối.
5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 13/19
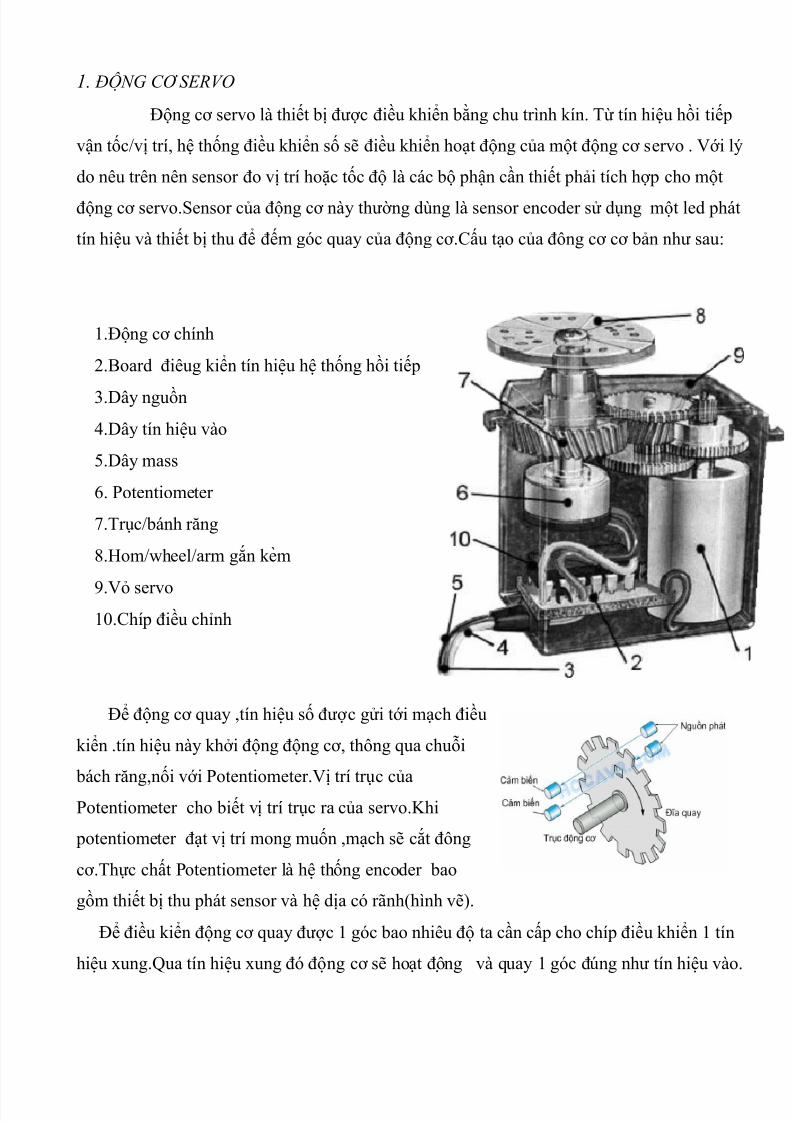
1. ĐÔ NG CƠ SERVO
Động cơ servo là thiết bị được điều khiển bằng chu trình kín. Từ tín hiệu hồi tiế
vận tốc/vị trí, hệ thống điều khiển số sẽ điều khiển hoạt động của một động cơ servo . Với
do nêu trên nên sensor đo vị trí hoặc tốc độ là các bộ phận cần thiết phải tích hợp cho một
động cơ servo.Sensor của đông cơ này thường dùng là sensor encoder sử dụng môt led ph
tín hiêu và thiết bị thu để đếm góc quay của đông cơ.Cấu tạo của đông cơ cơ bản như sau:
1.Đông cơ chính
2.Board điêug kiển tín hiêu hê thống hồi tiếp
3.Dây nguồn
4.Dây tín hiêu vào
5.Dây mass
6. Potentiometer
7.Trục/bánh răng
8.Hom/wheel/arm gắn kem
9.Vỏ servo10.Chí p điều chỉnh
Để đông cơ quay ,tín hiêu số được gửi tới mạch điều
kiển .tín hiêu này khởi đông đông cơ, thông qua chuỗi
bách răng,nối với Potentiometer.Vị trí trục củaPotentiometer cho biết vị trí trục ra của servo.Khi
potentiometer đạt vị trí mong muốn ,mạch sẽ cắt đông
cơ.Thực chất Potentiometer là hê thống encoder bao
gồm thiết bị thu phát sensor và hê dịa có rãnh(hình vẽ).
Để điều kiển đông cơ quay được 1 góc bao nhiêu đô ta cần cấp cho chíp điều khiển 1 tí
hiêu xung.Qua tín hiêu xung đó đông cơ sẽ hoạt đông và quay 1 góc đúng như tín hiêu v

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 14/19
2. HÊ THÔ NG ĐIÊU KIÊ N SU NG HA N VA KHI HA N
Hê thống này có tác dụng nhân lênh từ cpu và thực thi lênh đều khiển súng hàn và lượng
cung cấp cho súng hàn trong quá trình làm viêc tự đông của robot.
3. BÔ ĐIÊU KHIÊ N NGUÔ N HA N DTC-DM350
Bô điều khiển này nhân lênh điều khiển từ CPU và thực thi lênh.Bô điều khiển này
tác dụng điều kiển công suất của máy hàn.
4. HÊ THÔ NG CPU AX21, BÔ ĐIÊU KHIÊ N BĂ NG TAY VA BÔ NA P CHƯƠNG TRI NH
CPU là nơi quan trọng nhât của hê thông điên-điên tử,là nơi trung tâm xử lí mọi hoạt đ
của hê thống.
CPU AX21 gồm phần trung tâm là bô PLC tích hợ p chip vi điều khiển PIC.Ngoài ra cò
các mạch điên tử như: mạch công suất,mạch tạo xung cho điều kiển các đông cơ,mạch bi
tần,mạch xử lí tín hiêu vào từ bô điều khiển bằng tay và bô nạp chương trình.
III.HÊ THỐNG ĐIÊU KHIÊN
Hê thống bao gồm cpu điều kiển,tay máy điều kiển bằng các lênh và thuât toán đikiển. Người sö dông cã thÓ cã nhiÒu kiÓu giao diÖn lËp tr×nh ®iÒu khiÓrobot. Trươc sù ph¸t triÓn nhanh chãng cña c¸c lo¹i m¸y vi tÝnh dïng trc«ng nghiÖp vµ c¸c ng«n ng÷ lËp tr×nh ngµy cµng cã nhiÒu tiÖn Ých cviÖc lËp tr×nh ®iÒu khiÓn robot ngµy cµng dÔ dµng vµ thuËn tiÖn h¬n
C¸c robot thÕ hÖ ®Çu tiªn ®· được lËp tr×nh b»ng mét cú ph¸p mµ chóta gäi lµ : d¹y b»ng chØ dÉn (Teach by showing), robot được ®iÒu khiÓn®Ó di chuyÓn ®Õn c¸c ®iÓm mong muèn vµ c¸c vÞ trÝ ®ã được ghi l¹itrong bé nhí cña m¸y tÝnh, sau ®ã c¸c d÷ liÖu sÏ c ®äc tuÇn tù vµ robthùc hiÖn l¹i c¸c ®éng t¸c ®· được häc. §Ó d¹y robot, người sö dông cã thhưíng dÉn robot b»ng tay hoÆc th«ng qua mét thiÕt bÞ d¹y häc gäi lµ
Teach pendant. ThiÕt bÞ d¹y häc gåm mét hép nhá cÇm tay (teachingbox) cã c¸c nót bÊm vµ card ®iÒu khiÓn mµ nã cho phÐp ®iÒu khiÓn c
khíp cña robot ®¹t được c¸c gi¸ trÞ mong muèn. Hệ thống có thể lập trình có thđược lập trình bằng ng«n ngữ máy tính sau đó được dịch sang ngôn ngư của robot,dùng
phương pháp này chúng ta co thể tạo ra một thư viện lệnh.Sau đó được lưu trong bộ nạpchương trình.Từ những nhóm lệnh đó người ta xây dựng nên ngôn ngữ lập trình theo nhiêvụ. Nh÷ng ng«n ng÷ nÇy cho phÐp người sö dông ra c¸c lÖnh ®Ó robotthùc hiÖn mét c«ng viÖc mong muèn mét c¸ch trùc tiÕp mµ kh«ng cÇnx¸c ®Þnh mét c¸ch chi tiÕt c¸c ho¹t ®éng cña robot.

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 15/19
IV. HÊ THÔNG THÔNG TIN GIAM SATHê thống bao gồm các sensor cảm biến định vị được trang bị trong các đông cơ servo
định vị trí góc quay được của đông cơ qua đó đưa tín hiêu về bô xử lí của đông cơ.Ngoài ra còn có các sensor đo á p suất khí hàn phục phục vụ cho viêc điều kiển khí hàn
B.HÊ THỐNG SẢN XUẤT LINH HOẠT FMS
I. HÊ THÔNG CƠ KHÍHê thống cơ khí này bao gồm hê thống băng tải ,cơ cấu gắp của robot,cơ cấu chuyển
đông của các máy công cụ,hê thống quay của vành xoay vât gia công.Hê thống băng tải được đân đông bở dông cơ cuốn.Cơ cấu robot gồm cánh tay gắ p ,cơ cấu di chuyển ngang và cơ cấu di chuyển đứng .T
bô hê thống này được dẫn đông bởi các pitong(3 pitong khí).Hê bàn xoay được gắn với 1 đông cơ senvo nên nó có thể được điều chỉnh các góc qumôt cách chính xác.
II. HÊ THÔNG THỦY KHÍ-KHÍ NENHê thống này khí nen này được cung cấp nguồn khí bởi 1 máy bơm lố p xe máy.và to
bô được dẫn qua các mấy đo á p suất.Pitong khí nen có 2 dầu dẫn khí được nối van điên khí.van điên khí này sẽ điều khiển
pitong này đẩy hay keo.
Toàn bô hê thống khí được dẫn bởi các dây dẫn khí.III. HÊ THỐNG ĐIÊN-ĐIÊN TƯ1. Hê thống van điên khi :Van nay sư dụng hê thống đóng mở khí nen bằng ngy
lí từ trường.Khi có điên vào hê thống điên từ thì nó sẽ chuyển thành tác dung lực từ.Lực từnày làm chuyển đông cửa van và van có thể mở hoăc đóng tùy theo cácnh bố trinh hê thốn
2. Đông cơ senvo điêu khiển bàn xoay và các băng truyền có nguyên lí và cấu tđược trình bày ở hê thống robot
3. Hê thông cpu sư dung bô diều khiển PLC logic:hê thống này gồm các bảng m
điên tử:mạch xử lí tín hiêu sensors,mạch tạo xung.mạch công suât…toàn bô mạch đươc xử bở bô vi xử lí PIC.IV. HÊ THÔNG THÔNG TIN GIAM SAT1. Hê thống bình đo khí áp:cho biết áp suất trên các ông dẫn khí.2. Hê thống sensors:gồm 4 sensors:2 sensors màu,1 sensors từ,1 sensors quang.Các
sensors này hoạt đông theo các hiêu ứng vât lí.các tín hiêu hình ảnh,màu sắc,ánh sáng,từ

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 16/19
tính rồi chuyển thành các tín hiêu điên.các tín hiêu điên này được nối với mạch xử lí lo bỏ nhiêu sau đó nó trả về bô vi xử lí trung tâm là các tín hiêu phù hợ p cho công tác xử lí đưa ra các lênh điều khiển các cơ cấu chấ p hành khác.
V.HÊ THỐNG ĐIÊU KHIÊN
Hê thống điều kiển bao gồm hê thống điều khiển bằng tay thiết kế dưới dạng nút tròn
khiển và hê thống điều khiển bằng máy tính được kết nối vào bô xử lí cpu trung tâm.Ngônngữ lâ p trình điều khiển có thể là hợ p ngữ Assembly, ngôn ngữ c,c++,hay có thể là ngô nglênh… chương trình .Tùy thuôc vào cấu trúc phức tạ p của hê thống mà ta có thể chọn ngôngữ phù hợp…nhưng thường là sử dụng ngôn ngữ lênh điều kiển trược tiếp trên máy tính

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 17/19
PHẦN IV CÁC BƯƠC VÂ N HÀ NH
A.ROBOT CÔNG NGHIÊP
I. CHUYÊN ĐÔNG CỦA ROBOT HANRobot có 2 chế đô chuyển đông là chuyển đông theo tọa đô cực và chuyển đông theo tọ
đô đề cac .điều chỉnh theo hê tạo đô cực là điều chình các góc quay của các trục đông cơ.đichình theo tạo đô de-cac la điều chỉnh mỏ hàn theo các hướng các trục x,y,z .điều chỉnh thedề-các là tổ hợp của các điểu kiển tọa đô cực môt cách thống nhất.
II. CAC CHÊ ĐÔ LAM VIÊC CỦA ROBOT 1.MA N HI NH ĐIÊU KIÊ N TEACH PENDANT CU A ROBOT Teach pendant gồm 2 phần là các phím và màn hình hiên thị.Xung quanh màn hình là
phím chức năng từ f1-f12 ,phía dưới là các nút điều kiển chọn chế đô chuyển đông và phím nhâ p liêu.
Màn hình hiên thị điều kiển gồm: 2 bên rìa là hê thống hiên thị các lênh chức năncủa các phím f1-f12.Trên cùng của màn hình là các thông số của mỏ hàn theo thứ tự
bao gồm tốc đô mỏ hàn ,chế đô chuyển đông tự do của mỏ hàn,đô chính xác của mỏhàn và cuối cùng là hiên thị thứ tự tay máy. Phần trung tâm của màn hình là các dãylênh của máy hàn thực hiên của robot.2.ĐIÊU KHIÊ N VA CÂU LÊ NH HA N
Các câu lênh hàn:đóng/mở nguồn hàn,đẩy khí hàn,bât/tắt quang điên.Các câu lênh di chuyển đường hàn: mày hàn chỉ thực hiên được di chuyển của mỏ
hàn theo đường thăng và đường tròn.Muốn mỏ hàn đi chuyển theo môt đường cong phải chia nhỏ đường cong đó thành các đường tròn và thăng rồi thực hiên các lênh đchuyển thăng ,tròn nhỏ kết hợp lại,toàn bô di chuyển đó có thể được viết thành 1chương trình nhiêm vụ và lưu trong hôp nhớ.3. CHÊ ĐÔ LA M VIÊC CU A MAY HA N
Bao gồm chế đô điều khiển bằng tay qua các phím trên TEACH PENDANT , chế đ
điều khiển qua các lênh đơn giản có trên các phím chức năng f1-f2 và cuối cùng là điều kh
1 cách tự đông qua chương trình được lâ p trình săn.
III. CAC BƯƠC VÂN HANH MAY
Bước 1 :lắp các chi tiết cần hàn và vị trí hàn.
Bước 2:mở robot hàn,mở nguồn hàn.
Bước3: chọn chế đô hàn gồm chế đô hàn bằng điều kiển hay chế đô hàn chương trình tự
dông.

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 18/19
Bước 4:để máy tự chạy theo chương trình hoăc điều khiển các lênh hàn bằng tay.
B.HÊ THỐNG SẢN XUẤT LINH HOẠT FMS
Bước 1:cho phôi và chỗ cấy phôi.
Bước 2:chon chương trình hê thống gia công được lâ p trình săn.
Bước 3:khởi đông hê thống cho hê thống chạy và nhân được các sản phẩm gia công
phân loại.
Bước 4 :khiểm tra các hê thống hoạt đông,kiểm tra sản phẩn có bị lỗi hay không.nếu
gă p lỗi thì phải tiến hành tắt hê thống và kiểm tra ,kịp thời sửa chữa.

5/16/2018 Bao Cao Kien Tap Cdt - slidepdf.com
http://slidepdf.com/reader/full/bao-cao-kien-tap-cdt 19/19
KÊT LUÂ N
Thông qua buổi kiến tâp “ TI M HIÊU HÊ THÔ NG ROBOT CÔNG NGHIỆP VA HÊ
THÔ NG SA N XUÂT LINH HOAT FMS” tôi đã hiểu được phần nào về ngành cơ điên tử vàcác sản phẩn của ngành cơ điên tử.biết phân tích được các hê thống cơ điên,cụ thể là hê
thống robot hàn công nghiêp và hê thống trạm phân phối vât gia công.qua đó tôi nhân th
ngành cơ điên tử là môt ngành có ứng dụng rất cao và là ngành có triển vọng trong tương
lai.do thời gian có hạn nên bài báo cáo còn nhiều vấn đề sai sót và còn nhiều kiến thức v
thống tôi chưa nắm rõ được.kính mong thầy cô hướng dẫn có thể góp ý cho tôi để tôi có
hoàn thành tốt bài báo cáo và hiểu rõ thêm về các hê thống cơ điên tử.
CÁC TÀI LIÊU THAM KHẢO
1. Bai giang Robot công nghiê p –TS Phạm Đăng Phức-DH BKDN
2. Bai giang hê thông sản xuât fms cua thầy: §µo B¸ Phong - Bé m«nGCVL vµ DCCN, Khoa C¬ khÝ, §HBK Hµ Néi
3. Website: http://www.daihen-usa.com/ công ti OTC Daihen Nhật Bản
4. Các website khác như: cdtvn.net , http://www.picvietnam.com/....










![[123doc.vn] - KIEN TRUC MAY TINH - Mot So Kien Truc Tap Lenh](https://img.pdfslide.tips/doc/110x75/55cf9752550346d03390fd26/123docvn-kien-truc-may-tinh-mot-so-kien-truc-tap-lenh.jpg)


















