Embed Size (px)
Citation preview
Basic Control Engineering
Prof. Wonhee Kim
Examples for Control Systems
2
Contents
Stepper Motor
Electro Hydraulic System
3
Contents
Stepper Motor
Electro Hydraulic System
4
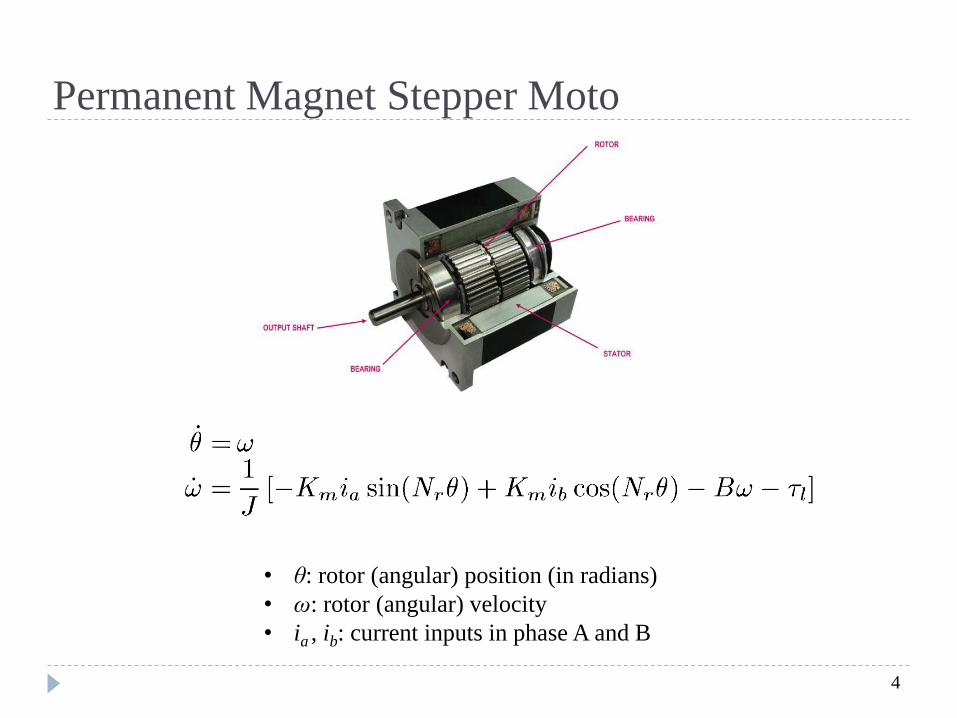
Permanent Magnet Stepper Moto
• θ: rotor (angular) position (in radians)
• ω: rotor (angular) velocity
• ia , ib: current inputs in phase A and B
5
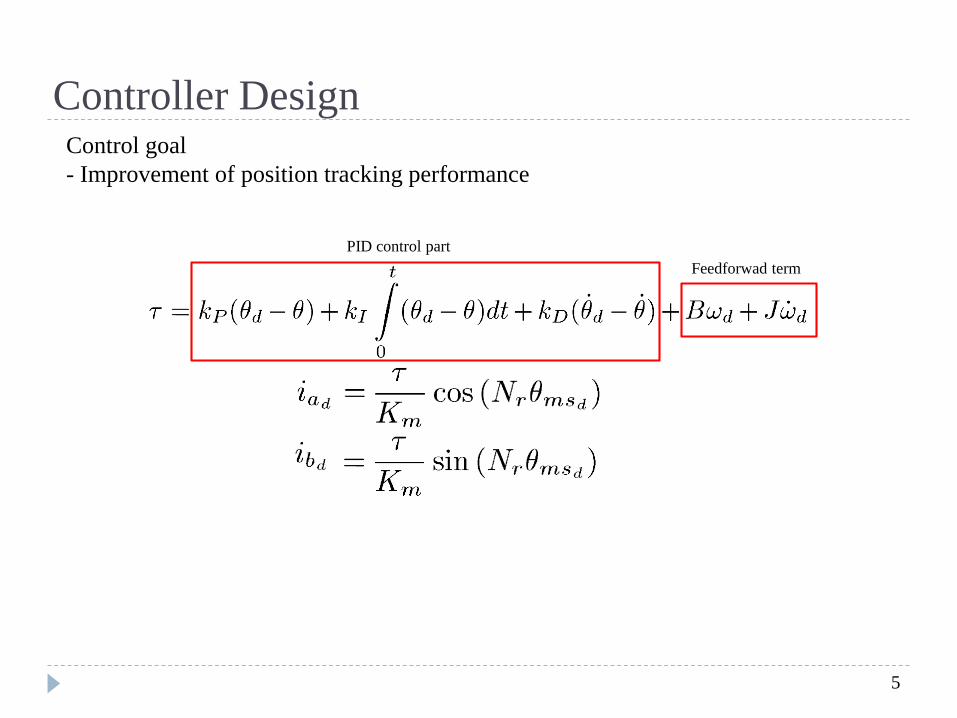
Controller DesignControl goal
- Improvement of position tracking performance
Feedforwad term
PID control part
6
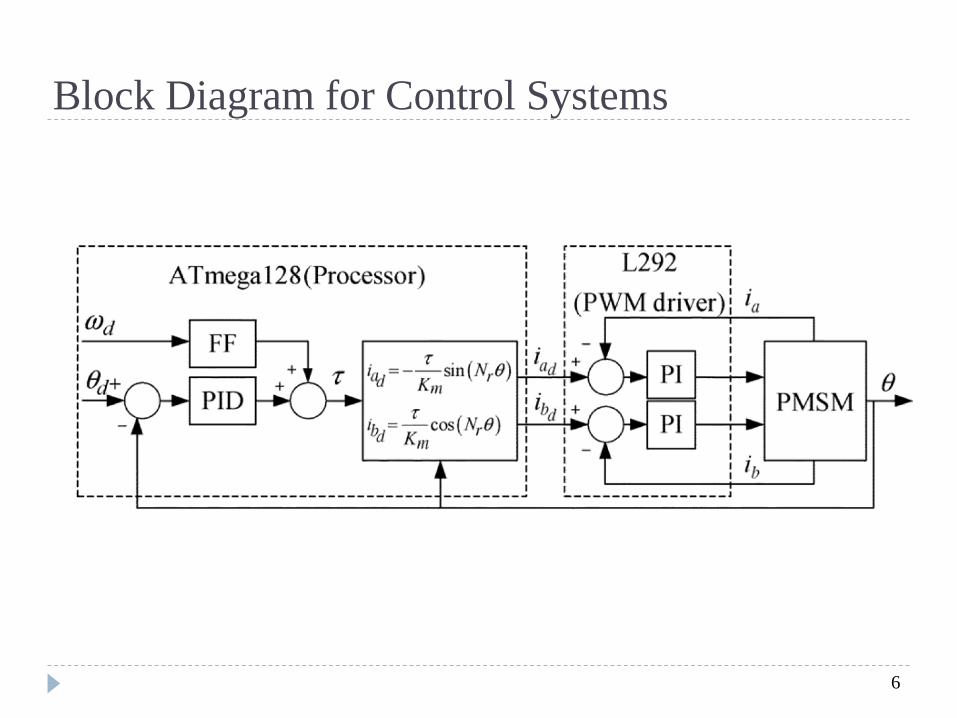
Block Diagram for Control Systems
7
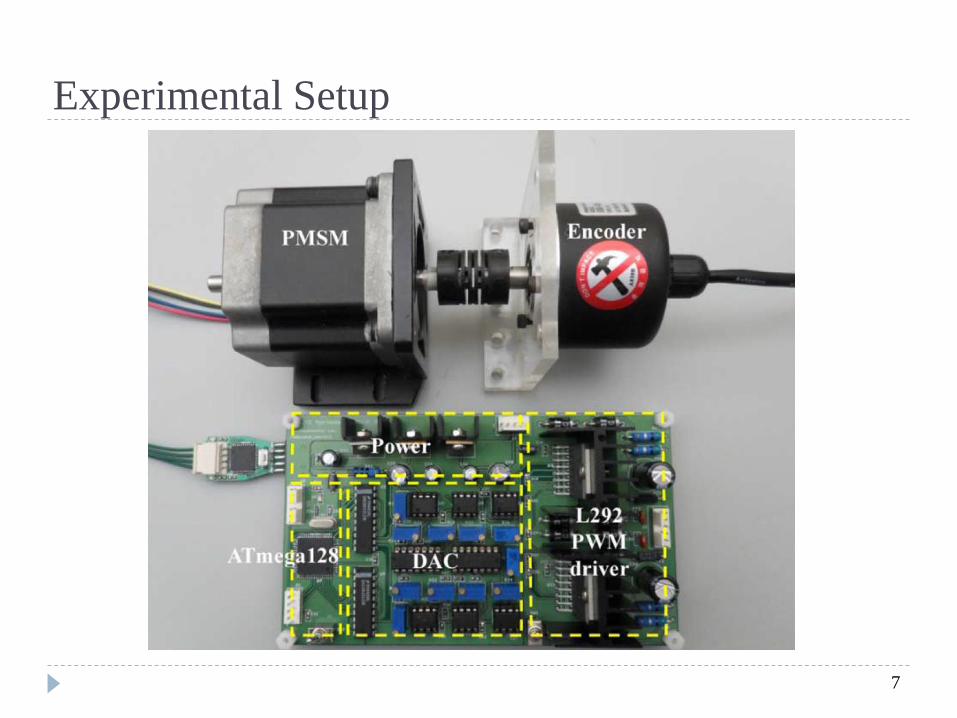
Experimental Setup
8
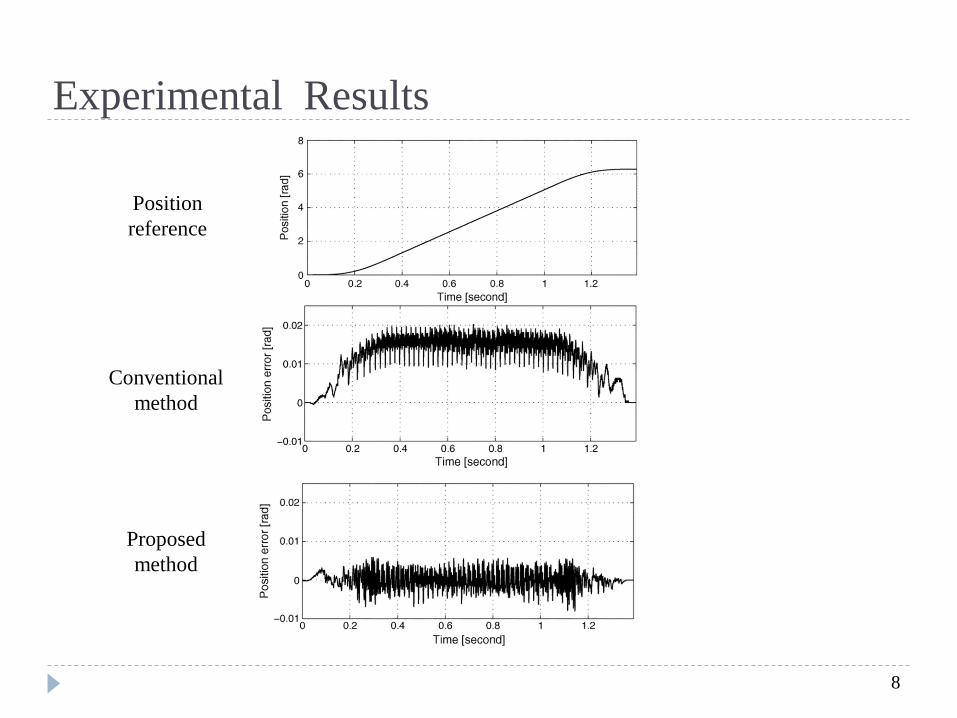
Experimental Results
Position
reference
Conventional
method
Proposed
method
9
Contents
Stepper Motor
Electro Hydraulic System
10
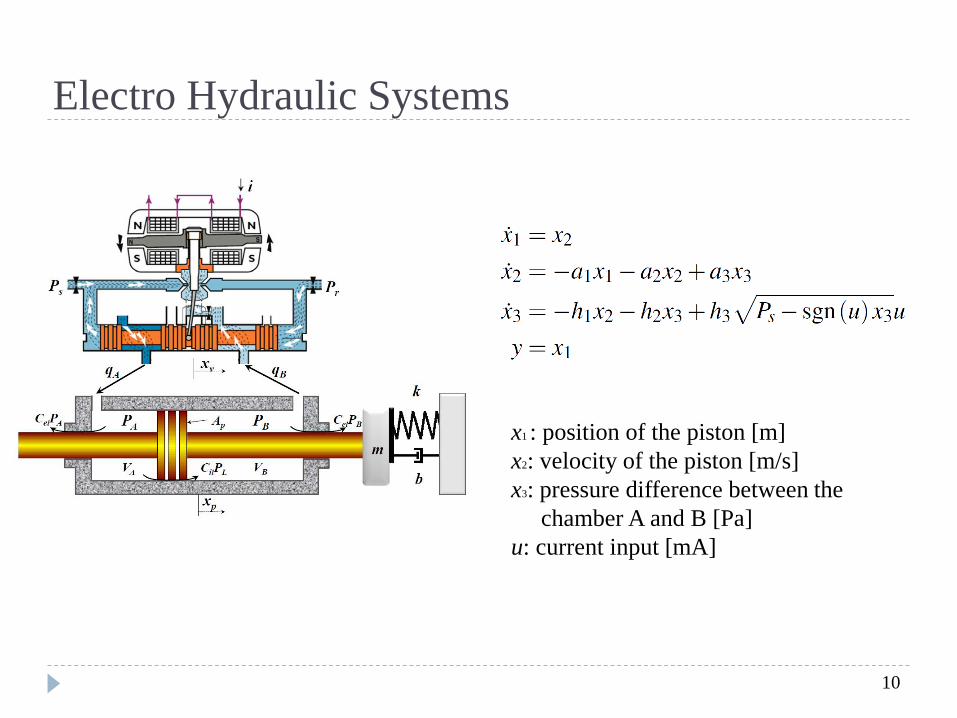
Electro Hydraulic Systems
x1 : position of the piston [m]
x2: velocity of the piston [m/s]
x3: pressure difference between the
chamber A and B [Pa]
u: current input [mA]
11
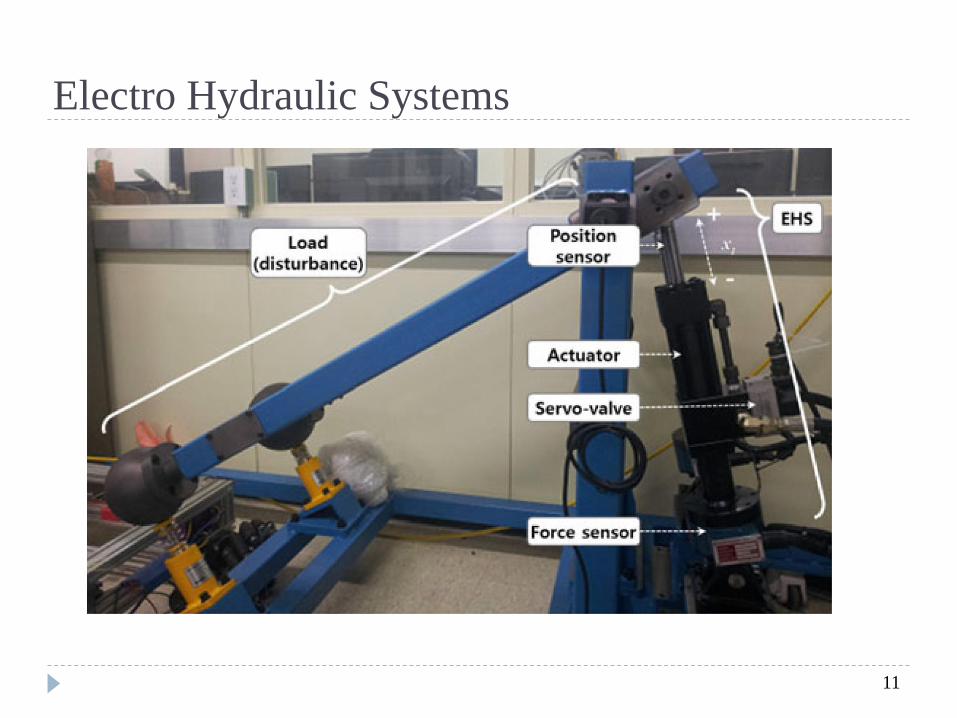
Electro Hydraulic Systems
12
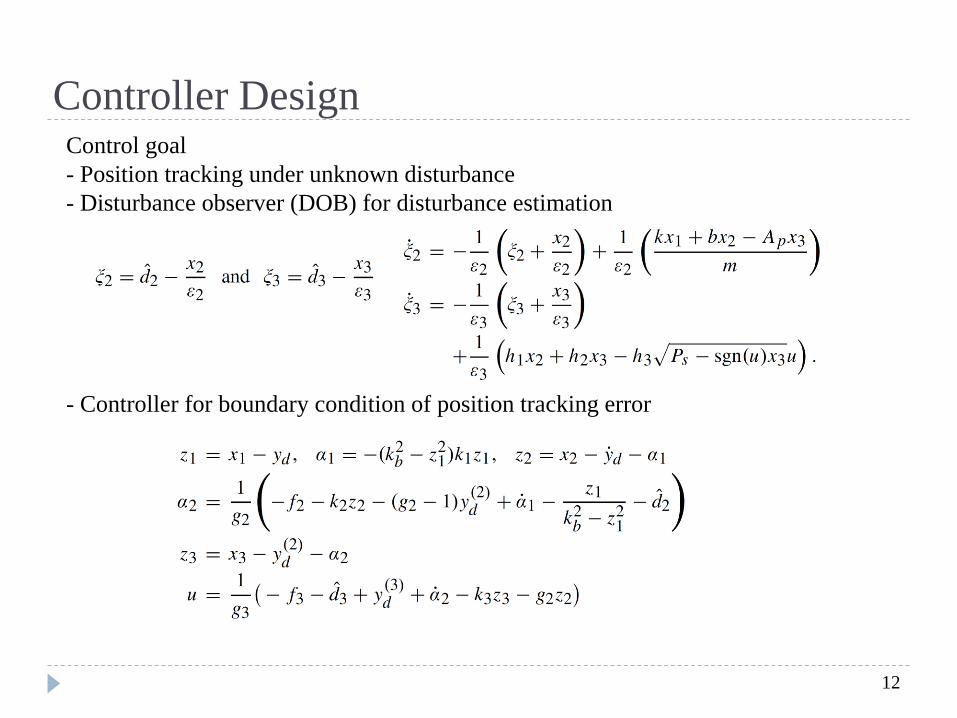
Controller DesignControl goal
- Position tracking under unknown disturbance
- Disturbance observer (DOB) for disturbance estimation
- Controller for boundary condition of position tracking error
13
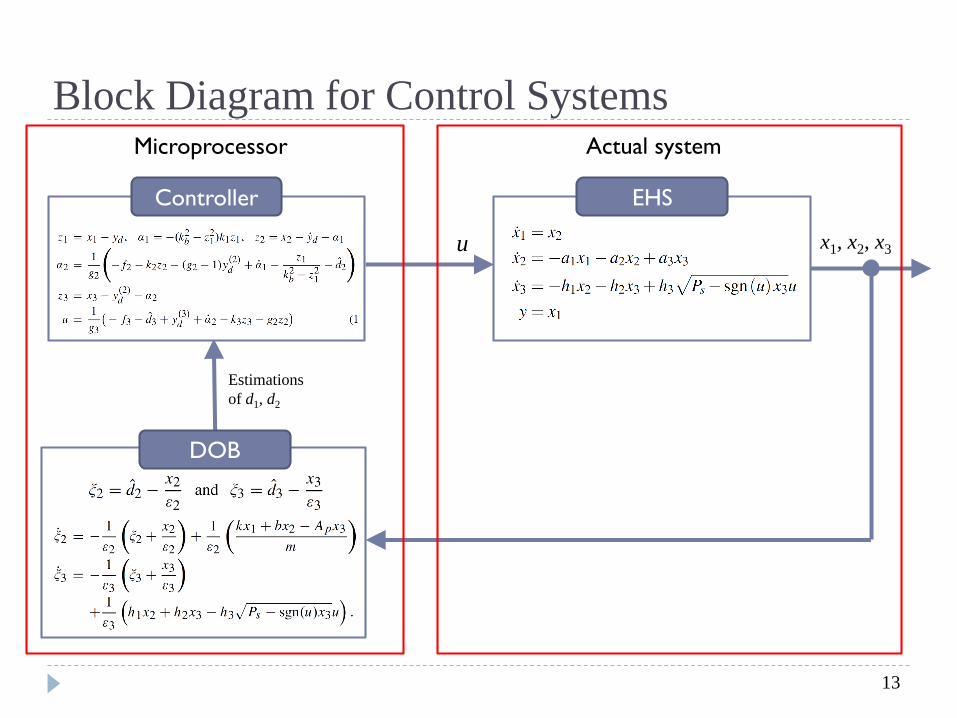
Block Diagram for Control Systems
EHS
x1, x2, x3u
DOB
Controller
Estimations
of d1, d2
Microprocessor Actual system
14
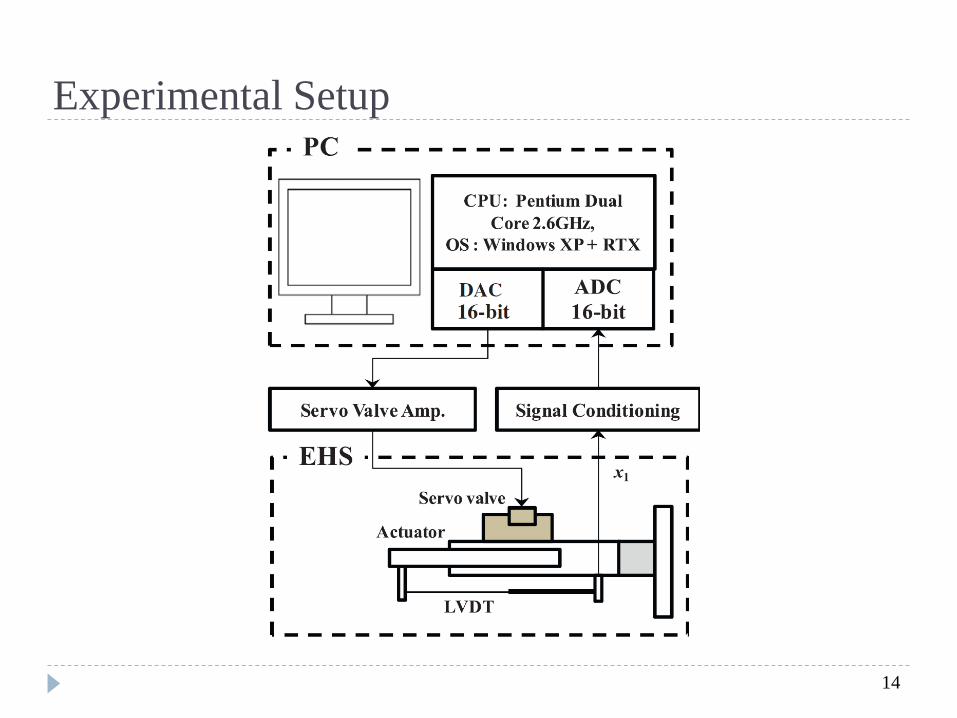
Experimental Setup
15
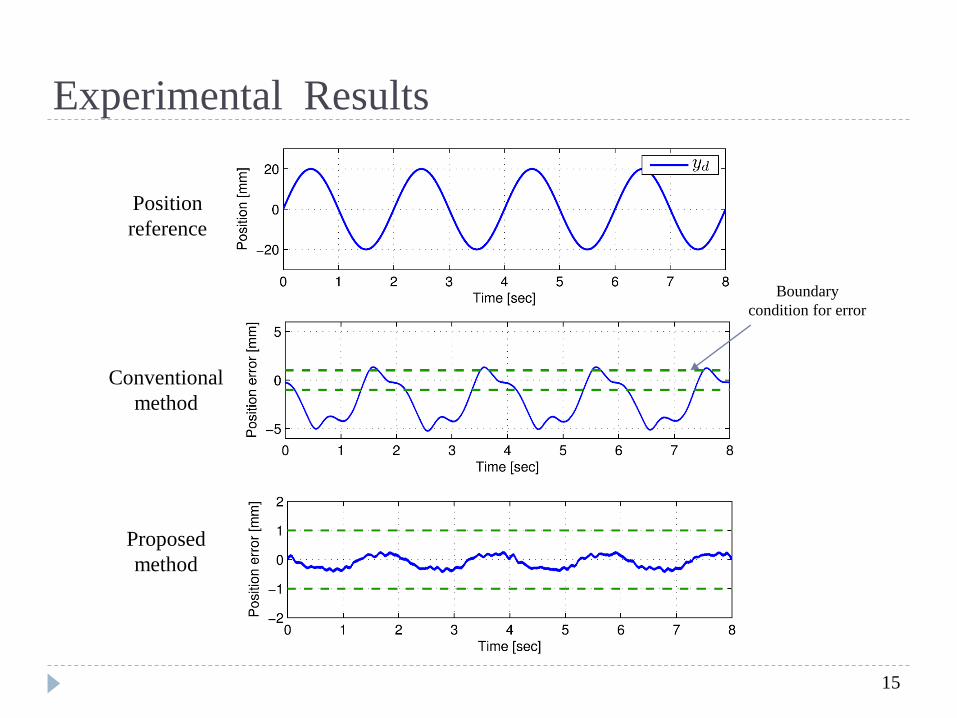
Experimental Results
Position
reference
Conventional
method
Proposed
method
Boundary
condition for error





























