-
TD1
TRAVAIL DEMAND Problmatique du sujet Le systme dempilage de
palettes Multitec est motoris par un ensemble compos dun moteur
hydraulique et dune centrale hydraulique fournissant lnergie
ncessaire. Afin de diminuer les cots de fabrication et dentretien,
la socit ERM dcide de proposer le systme avec une motorisation
lectrique.
- Vous validerez, dans un premier temps, les caractristiques du
systme permettant de raliser la cadence du systme donne par le
constructeur.
- Vous dterminerez, dans un second temps, les caractristiques de
la motorisation lectrique ainsi que les lments de guidage du systme
de levage.
Dmarche technique Afin de dterminer les caractristiques du
moteur lectrique, moteur lectrique ralisant la fonction stocker la
palette , on se propose de suivre la dmarche suivante :
- Analyse du fonctionnement global du systme ; - Analyse
cinmatique du sous-systme de transfert ; - Analyse cinmatique de
llvateur ; - Analyse dynamique du mouvement de llvateur ; -
Caractristiques nergtiques de la chane de transmission de mouvement
de llvateur ; - Choix du moto - rducteur du sous-ensemble de
stockage ; - Montage des lments de guidage de llvateur.
1. Analyse du fonctionnement global du systme Analyse du
fonctionnement de llvateur
En vous aidant des documents techniques DT 6 DT 9 et du schma
cinmatique prsent sur le document rponse DR 1, rpondre sur le
document rponse DR 1 aux questions suivantes : 1.1. Llvateur (105)
est motoris par un vrin hydraulique (300) raccord une centrale
hydraulique (non
reprsente). Dfinir la liaison entre le vrin (300) et lensemble
cinmatique de llvateur (105). Rfrez vous aux documents ressources
R1 et R2 issus de la documentation constructeur. Reprsenter la
liaison normalise entre (300) et (105), sur le schma cinmatique
incomplet.
1.2. Le vrin est aussi en liaison avec le bti (101). Dfinir la
liaison entre le vrin (300) et le bti (101). Reprsenter la liaison
normalise entre (300) et (101), sur le schma cinmatique
incomplet.
1.3. Quel est alors le mouvement de llvateur (105) par rapport
au bti (101) cr par le vrin (300) ? 1.4. Pourquoi le corps du vrin
(300) nest-il pas mont en liaison encastrement par rapport au bti ?
Justifier
votre rponse en fonction du mode de fabrication du bti de la
machine (en mcano-soud). - Analyse des lments constituant le sous
ensemble de saisie
1.5. Reprer sur les documents techniques DT 6 DT 9 et complter
sur le schma cinmatique incomplet du document rponse DR 1 les
numros des lments constituant le sous-ensemble de saisie.
2. Analyse cinmatique du sous-systme de transfert Cette partie
permettra de valider la chane cinmatique utilise pour le convoyage
des palettes. On sattachera tout particulirement vrifier que la
cadence donne par le constructeur est bien respecte par le
sous-ensemble de transfert.
Donnes, hypothses dtude. - On suppose que la phase dacclration
de la palette pose sur le systme de transfert est trs courte.
Par consquent, la vitesse de translation de la palette par
rapport au bti est suppose constante ; - On suppose que la palette
roule sans glisser sur les rouleaux du systme de transfert ; - Les
caractristiques des lments constituant la chane de transmission
sont disponibles sur le
document technique DT 4 ;
-
TD2
- Distance parcourir minimum pour lvacuation dune palette : 600
mm.
Le schma de la chane dnergie de la transmission de puissance se
rfrant aux documents techniques DT 7, DT 8 et DT 9 se prsente de la
faon ci-dessous :
Travail demand
Rpondre aux questions suivantes sur les documents rponse DR1 et
DR 2. 2.1. Proposer la solution technologique retenue par le
constructeur permettant de raliser la transmission entre le
pignon moteur (132) et le pignon du rouleau (146). 2.2. Calculer
la frquence de rotation du pignon rducteur Nred. 2.3. Dterminer la
frquence de rotation dun rouleau du systme de transfert Nroul. 2.4.
Quelle est la vitesse de translation Vtp de la palette sur le
convoyeur par rapport au bti de la machine ? 2.5. Quel temps Tt
faut-il au systme de transfert pour vacuer une palette ?
3. Analyse cinmatique de llvateur Cette partie permettra de
dterminer les caractristiques cinmatiques de la loi de commande du
moto- rducteur du sous-ensemble de stockage. On sintressera plus
prcisment, lors du cycle dempilage des palettes, la monte de
llvateur (voir tape 12 du document technique DT 3).
Donnes, hypothses dtude On tudie le mouvement de llvateur
suivant :
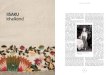
La loi de commande de vitesse du mouvement de llvateur rpond la
loi des vitesses suivante : V (m/s)
Vmax t0 t1 t2 t3
600 mm Rouleau
Palette
Moteur Rducteur Pignon rducteur (132) Lien flexible Rouleau
(146)
lvateur
bti
-
TD3
Le respect du cahier des charges impose les valeurs suivantes :
- Course total du dplacement 350 mm ; - Vitesse maximum de
dplacement Vmax = 0,1 m/s ; - Dure dacclration gale dure de
dclration T = (t1 - t0) = (t3 - t2) = 0,5 s ;
Les dures des autres tapes sont dfinies sur le document
technique DT 3. Travail demand
Rpondre aux questions suivantes sur les documents rponses DR 2
et DR 3. Dans un premier temps, on cherche dterminer la valeur de
lacclration linaire lors de la phase 1. 3.1. Donner le type de
mouvement de chacune des phases de la loi de commande des vitesses
propose ci-dessus.
Donner, pour les phases 1 et 2, les quations gnrales de
mouvement (position, vitesse et acclration), 3.2. Etablir le bilan
pour les 3 phases (Ne pas inscrire les rsultats des questions
suivantes) 3.3. Dterminer la valeur de lacclration (note a1) lors
de la phase 1. On donne X01 = 0 et V01 = 0 3.4. Quelle est la
distance parcourue lors de la phase 1 : X1.
Dans un second temps, on cherche dterminer le temps de monte de
llvateur, afin de vrifier le respect du cahier des charges (cadence
: 4 palettes par minute). 3.5. Ecrire les quations particulires du
mouvement 2 en dterminant les constantes X02 et V02 de la phase 2.
3.6. Calculer la distance parcourue par llvateur la fin de la phase
2 : X2 3.7. Calculer la date t2, date de fin de la phase 2. 3.8.
Quelle est la dure Tm = (t3 - t0) du cycle de monte de llvateur
sachant que (t1 - t0) = (t3 - t2)? 3.9. En prenant en compte les
rsultats de la question 2.5 du paragraphe Analyse cinmatique du
sous-systme
de transfert , de la question 3.8 du paragraphe Analyse
cinmatique de llvateur et des lments du cahier des charges du
document technique DT 3 Temps de chaque tape du cycle dempilage ,
vrifier que le cahier des charge concernant la cadence du systme
est respect (4 palettes par minute).
4. Analyse dynamique du mouvement de llvateur Cette partie
permettra de dterminer le couple moteur minimum utile, afin de
respecter le cahier des charges.
Donnes, hypothses dtude La solution retenue pour la modification
de la motorisation de llvateur (changement de la motorisation
hydraulique par un moteur lectrique) se prsente suivant la
modlisation suivante :
R
M
Bti (0)
lvateur (3)
G
O
A
B
Pignon moteur (1)
X
Y
Z
Chane motrice (2)
-
TD4
Ltude seffectuera avec les hypothses simplificatrices suivantes
: - Les liaisons sont considres parfaites ; - Les solides sont
indformables ; - La masse des pices est constante au cours du
mouvement ; - Le repre associ au bti peut tre considr comme un
repre Galilen ; - Le systme peut tre considr comme plan (O ; Y ; Z)
; - Linertie des pices en mouvement de rotation sera nglige, -
Llvateur est en mouvement uniformment vari.
Quelles que soit les valeurs dtermines dans les questions
prcdentes, seules les valeurs donnes ci-dessous seront prendre en
compte dans la suite du problme.
- Valeur de lacclration amax = 0,25 m/s ; - Valeur de
lacclration terrestre (pesanteur) g = 9,81 m/s ; - Masse de
llvateur vide : M = 200 kg ; masse dune palette : m = 20 kg ; - Le
magasin peut contenir 6 palettes vides ; - Liaison entre llvateur
et le bti : liaison glissire daxe (O ; Z) ; - Pignon moteur : 19
dents, pas = 15,8 mm.
La liaison glissire entre llvateur est le bti tant ralise par
des galets, on retiendra le cas de charge suivant pour ltude
dynamique de llvateur :
3/2B
3/0D
3P 3/0E
Travail demand Rpondre aux questions suivantes sur les documents
rponses DR 3 et DR 4. 4.1. Dans quels cas de charge et de mouvement
faut-il dterminer les caractristiques du moteur ? Entourer les
rponses correspondant aux cas de charge et de mouvement pour le
calcul du moteur. (1 rponse par colonne) 4.2. Dterminer la valeur
de la masse en mouvement correspondant ce cas : m3 4.3. Dterminer
le poids P3 de llvateur. (Arrondir 10N prs, au plus prs) 4.4.
Llvateur 3 est isol ci-dessus. Faire le bilan des actions mcaniques
agissant sur cet lvateur. Les actions
dfinies D0/3 et E0/3 sont produites par la liaison glissire 3/0.
4.5. Appliquer le Principe Fondamental de la Dynamique llvateur.
4.6. En utilisant lquation issue du Principe Fondamental de la
Dynamique en projection sur Z, calculer la valeur
de leffort de la chane motrice sur llvateur B2/3 dans le cas
dtermin la question 4.1. de ce paragraphe. 4.7. laide des donnes
prcdentes, dterminer la valeur du rayon R du pignon moteur. 4.8.
Dterminer, laide de la question prcdente, la valeur du couple
moteur Cmot correspondant au cas de
fonctionnement le plus critique.
lvateur
G
D
B
X
Y
Z
E
-
TD5
5. Caractristiques nergtiques de la chane de transmission Cette
partie permettra de dterminer la puissance du moteur de
llvateur.
Donnes, hypothses dtude La solution retenue pour la modification
de la motorisation de llvateur (changement de la motorisation
hydraulique par un moteur lectrique) se prsente suivant la
modlisation suivante :
Quelles que soit les valeurs dtermines dans les questions
prcdentes, seules les valeurs donnes ci-dessous seront prendre en
compte dans la suite du problme.
- Llvateur se dplace de bas vers le haut, - Vitesse de
dplacement maximum de llvateur : Vmax = 0,1 m/s ; - Effort maximum
de la chane motrice sur llvateur F2/3 = 3300 N ; - Rendement de la
transmission par chane c = 0,85 ; - Rendement du rducteur accoupl
au moteur de llvateur m = 0,9
Travail demand Rpondre aux questions suivantes sur les documents
rponse DR 4 et DR 5.
5.1. Calculer la puissance maximum ncessaire pour dplacer
llvateur PPPPelev.
5.2. Dterminer le rendement global de la transmission g.
5.3. Dduire des questions prcdentes, la puissance minimum du
moteur pour motoriser llvateur PPPPmot.
6. Montage des lments de guidage de llvateur Cette partie
permettra didentifier les conditions de montage et de
fonctionnement de la liaison glissire entre le bti et llvateur.
Analyse et structure de la liaison Pour que le mcanisme
fonctionne correctement, il faut respecter un certain nombre de
conditions. Nous allons nous attacher dcouvrir certaines de ces
conditions.
R
M
Bti (0)
lvateur (3)
G
O
A
B
Pignon moteur (1)
X
Y
Z
Chane motrice (2)
-
TD6
Prsentation gnrale du guidage. Dtail de la liaison glissire
L'lvateur est guid par 4 galets transversaux et 4 galets latraux
qui roulent sans glisser sur les rails de guidage souds aux
montants de la machine.
Dtail des galets
Galet latral Galet transversal
Galets transversaux
Galets latraux
-
TD7
Conditions de fonctionnement. Les conditions fonctionnelles de
bon fonctionnement de la liaison glissire sont les suivantes :
- Seule, la surface de roulement des galets transversaux et
latraux doit toucher le bti ; - L'axe du galet latral ne doit pas
toucher le bti ; - Le galet latral doit pouvoir rentrer dans le
profil soud ; - Le galet transversal doit pouvoir rentrer dans le
profil soud ; - Pour une bonne prise de palette par les taquets,
l'lvateur et le chssis de la machine doivent tre
parallles sur toute la longueur du guidage.
Travail demand analyse des contacts Rpondre aux questions
suivantes sur le document rponse DR 5. La premire partie du travail
permettra didentifier les surfaces fonctionnelles de la liaison
glissire. 6.1. Pourquoi a-t-on utilis des galets pour raliser la
liaison glissire entre llvateur et le bti ? 6.2. Repasser en
couleur les contacts entre llvateur et le bti. 6.3. Combien y a
t-il de surfaces fonctionnelles distinctes dans la totalit du
mcanisme ? 6.4. Une liaison glissire ncessite au minimum 5 contacts
distincts. Pourquoi en a-t-on utilis 8 ?
Une liaison hyperstatique (liaison ayant plus de contact que le
strict minimum), impose des contraintes de fabrication et de
montage. Chaque galet doit tre en contact avec son rail. Une des
solutions technologiques pour rpondre ces contraintes est de monter
les galets avec un systme de rglage. Chaque galet devra tre rglable
en translation suivant laxe du trou oblong dfinit ci-dessous.
La seconde partie du travail permettra de concevoir le systme de
rglage des galets transversaux suivant laxe du trou oblong dfini
ci-dessus.
Cahier des charges du systme de rglage : - Laxe du galet (118)
doit tre en liaison encastrement avec llvateur (105) ; - La liaison
encastrement entre (118) et (105) doit permettre le rglage de la
position du galet suivant
laxe du trou oblong ; - Ce rglage doit tre ralis laide doutils
standards (clefs, tournevis etc.) ; - Le mcanisme de rglage doit
tre indpendant des lments de maintien en position de laxe (118)
avec (105) ; - Le maintien en position du galet transversal
seffectue par le serrage de (118) avec lcrou (316)
respecter le montage ci-aprs ; - Un desserrage des lments de
maintien en position de laxe (118) ne doit pas permettre un
drglage de la mise en position du galet suivant laxe du trou
oblong. Cest dire que les lments de maintien en position et les
lments de mise en position sont indpendants ;
- Les lments suivants ne peuvent pas tre modifis : (118) ; (129)
; (312) ; (315) ; (316) ; - Des lments de quincaillerie (lments du
commerce) peuvent tre ajouts si la solution technique
propose le ncessite.
Axe du trou oblong
-
TD8
tude graphique dune solution constructive Rpondre la question
suivante sur un des documents rponse. 6.5. Proposer une solution
technologique permettant le rglage du galet suivant laxe du trou
oblong. La
solution propose doit rpondre au cahier des charges dcrit
prcdemment et sinspirer du schma ci-dessous. Vous pouvez rpondre au
choix :
- soit sous forme de croquis en perspective (voir DR 6) ; - soit
sous forme de croquis clat en perspective (voir DR 7) ; - soit sous
forme de mise en plan (vue de face en coupe A-A et vue de gauche)
(voir DR 8).
Schma pour rpondre la question 6.5.
Rpondre la question suivante sur le document rponse DR 9. 6.6.
Reprer les surfaces et noncer les contraintes permettant
lassemblage du galet avec son systme de
rglage sur le croquis. (voir exemple sur document rponse DR
9).
105
316
315
126
312 118 129
Axe du trou oblong
118 316
105
312
126
315
Fixation avec 126
Systme de rglage