Embed Size (px)
Citation preview

Moderné vzdelávanie pre vedomostnú spoločnosť/
Projekt je spolufinancovaný zo zdrojov EÚ
NUMERICKÁ MATEMATIKA
Fakulta elektrotechniky a informatiky
Štefan Berežný

Autor: Štefan Berežný
ISBN: 978-80-553-1067-1
Rukopis neprešiel jazykovou úpravou.
Za odbornú a obsahovú stránku zodpovedá autor.
Táto publikácia vznikla za finančnej podpory z Európskeho sociálneho fondu v rámci
Operačného programu VZDELÁVANIE.
Prioritná os 1 Reforma vzdelávania a odbornej prípravy
Opatrenie 1.2 Vysoké školy a výskum a vývoj ako motory rozvoja vedomostnej
spoločnosti.
Názov projektu: Balík inovatívnych prvkov pre reformu vzdelávania na TUKE

Moderné vzdelávanie pre vedomostnú spoločnosť/
Projekt je spolufinancovaný zo zdrojov EÚ
NUMERICKÁ MATEMATIKA
Fakulta elektrotechniky a informatiky
Štefan Berežný

Numerická matematikaPrvé vydanie
Autor: c© RNDr. Štefan BEREŽNÝ, PhD., 2012
Recenzovali: prof. RNDr. Jozef DŽURINA, CSc.RNDr. Ján BUŠA, CSc.
Vydavateľ: Technická univerzita v KošiciachFakulta elektrotechniky a informatiky
ISBN: 978-80-553-1067-1
Za odbornú a jazykovú stránku tejto vysokoškolskej učebnice zodpovedajú autori.Rukopis neprešiel redakčnou ani jazykovou úpravou.

4
Predhovor
Tento učebný text obsahuje prehľadnú teóriu, riešené príklady a neriešenéúlohy k učivu preberanému v predmete Numerická matematika pre externýchštudentov bakalárskeho štúdia odboru aplikovaná informatika na Fakulteelektrotechniky a informatiky Technickej univerzity v Košiciach. Učebnicaje rozdelená do piatich kapitol. Každá kapitola je rozdelená na podkapitolypodľa jednotlivých oblastí. V závere každej kapitoly sú podkapitoly riešenýchúloh, neriešených úloh a výsledky k nim.
Táto učebnica numerickej matematiky je elektronickou verziou tlačenejučebnice Numerická matematika. Tlačená verzia má obmedzený počet strán,čomu zodpovedá aj rozsah a forma prezentovanej teórie a riešených príkladov.Táto učebnica obsahuje aj obrázky k teórii aj k príkladom, rozšírený komentára súbory neriešených úloh aj s výsledkami. Okrem numerickej matematikysú v tejto učebnici doplnené aj teória a príklady o základné informácie zmatematickej analýzy a lineárnej algebry, keďže si to vyžaduje študijný odborAplikovaná informatika.
Táto učebnica je k dispozícii na CD a na web stránke KMTI FEI TUKEa v systéme Moodle, ktorý je spravovaný na FEI TUKE.
Košice 31. augusta 2012 Autor

5
Zoznam skratiek a symbolovSLR – sústava lineárnyh algebraických rovníc
HSLR – homogénna sústava lineárnych algebraických rovníc
N – množina prirodzených čísel
Z – množina celých čísel
Q – množina racionálnych čísel
R – množina reálnych čísel
C – množina komplexných čísel
D(f) – definičný obor funkcie f
H(f) – obor hodnôt funkcie f
det(A) – determinant matice A
h(A) – hodnosť matice A
A> – transponovaná matica k matici A
~v – vektor
Ω(S) – množina riešení SLR S

ZOZNAM OBRÁZKOV 6
Zoznam obrázkov1 Konštantná funkcia . . . . . . . . . . . . . . . . . . . . . . . . 152 Lineárna funkcia . . . . . . . . . . . . . . . . . . . . . . . . . 163 Kvadratická funkcia . . . . . . . . . . . . . . . . . . . . . . . . 184 Odmocninová funkcia . . . . . . . . . . . . . . . . . . . . . . . 195 Exponenciálna funkcia . . . . . . . . . . . . . . . . . . . . . . 216 Logaritmická funkcia . . . . . . . . . . . . . . . . . . . . . . . 227 Goniometrická funkcia: sin x . . . . . . . . . . . . . . . . . . . 238 Goniometrická funkcia: cosx . . . . . . . . . . . . . . . . . . . 239 Goniometrická funkcia: tg x . . . . . . . . . . . . . . . . . . . 2410 Goniometrická funkcia: cotg x . . . . . . . . . . . . . . . . . . 25

7 ZOZNAM TABULIEK
Zoznam tabuliek1 Tabuľka pre metódu bisekcie . . . . . . . . . . . . . . . . . . . 482 Riešenie rovnice metódu bisekcie . . . . . . . . . . . . . . . . . 533 Riešenie rovnice Newtonovou metódu . . . . . . . . . . . . . . 544 Riešenie rovnice iteračnou metódu . . . . . . . . . . . . . . . . 565 Lichobežníková metóda. . . . . . . . . . . . . . . . . . . . . . 826 Riešenie SLR Jacobiho iteračnou metódu . . . . . . . . . . . . 107

OBSAH 8
ObsahPredhovor 4
Zoznam skratiek a symbolov 5
Zoznam obrázkov 6
Zoznam tabuliek 7
Obsah 9
1 Reálna funkcia jednej reálnej premennej 101.1 Množina reálnych čísel a ďalšie číselné množiny . . . . . . . . 101.2 Reálna funkcia jednej reálnej premennej . . . . . . . . . . . . 131.3 Limita funkcie . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.4 Derivácia funkcie . . . . . . . . . . . . . . . . . . . . . . . . . 311.5 Riešené príklady . . . . . . . . . . . . . . . . . . . . . . . . . 381.6 Neriešené úlohy . . . . . . . . . . . . . . . . . . . . . . . . . . 411.7 Výsledky neriešených úloh . . . . . . . . . . . . . . . . . . . . 44
2 Riešenie algebraických rovníc s jednou reálnou neznámou 452.1 Separácia koreňov . . . . . . . . . . . . . . . . . . . . . . . . . 452.2 Metóda bisekcie . . . . . . . . . . . . . . . . . . . . . . . . . . 462.3 Metóda prostej iterácie . . . . . . . . . . . . . . . . . . . . . . 482.4 Newtonova metóda . . . . . . . . . . . . . . . . . . . . . . . . 512.5 Riešené príklady . . . . . . . . . . . . . . . . . . . . . . . . . 532.6 Neriešené úlohy . . . . . . . . . . . . . . . . . . . . . . . . . . 572.7 Výsledky neriešených úloh . . . . . . . . . . . . . . . . . . . . 58
3 Aproximácia funkcie 593.1 Interpolácia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.2 Metóda najmenších štvorcov . . . . . . . . . . . . . . . . . . . 613.3 Riešené príklady . . . . . . . . . . . . . . . . . . . . . . . . . 653.4 Neriešené úlohy . . . . . . . . . . . . . . . . . . . . . . . . . . 673.5 Výsledky neriešených úloh . . . . . . . . . . . . . . . . . . . . 68

9 OBSAH
4 Výpočet určitého integrálu 694.1 Primitívna funkcia . . . . . . . . . . . . . . . . . . . . . . . . 694.2 Určitý integrál . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.3 Numerické metódy výpočtu určitého integrálu . . . . . . . . . 754.4 Riešené príklady . . . . . . . . . . . . . . . . . . . . . . . . . 804.5 Neriešené úlohy . . . . . . . . . . . . . . . . . . . . . . . . . . 844.6 Výsledky neriešených úloh . . . . . . . . . . . . . . . . . . . . 87
5 Lineárna algebra 885.1 Vektorový priestor . . . . . . . . . . . . . . . . . . . . . . . . 885.2 Matice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 925.3 Determinanty . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.4 Sústavy lineárnych rovníc . . . . . . . . . . . . . . . . . . . . 975.5 Numerické riešenie sústav lineárnych rovníc . . . . . . . . . . . 1015.6 Riešené príklady . . . . . . . . . . . . . . . . . . . . . . . . . 1065.7 Neriešené úlohy . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.8 Výsledky neriešených úloh . . . . . . . . . . . . . . . . . . . . 113
Register 118
Literatúra 118

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 10
1 Reálna funkcia jednej reálnej premennej
1.1 Množina reálnych čísel a ďalšie číselné množinyPrirodzené čísla 1, 2, 3, 4, 5, . . . sú čísla, ktorými vyjadrujeme počet. Množinuprirodzených čísel budeme označovať písmenom N. Pre prirodzené čísla platíprincíp úplnej matematickej indukcie. Ak N je nejaká množina prirodzenýchčísel, ktorá obsahuje číslo 1 a ktorá s každým prirodzeným číslom n obsahujeaj číslo n+1, potom množina N obsahuje všetky prirodzené čísla, t. j. N=N.
Celé čísla dostaneme rozšírením množiny prirodzených čísel N o číslo 0(nula) a o čísla −1, −2, −3, . . . . Množinu celých čísel označíme písmenomZ. Prirodzené čísla N sa nazývajú kladné celé čísla a čísla −1, −2, −3, . . . sanazývajú záporné celé čísla.
Racionálne čísla dostaneme rozšírením celých čísel o zlomky, t. j. o číslav tvare a
b, kde a a b sú celé čísla, b 6= 0. Platí, že a
b= c
dpráve vtedy, ak
platí a ·d = c · b. Množinu racionálnych čísel budeme označovať písmenom Q.Usporiadanie racionálnych čísel je husté, t.j. medzi každými dvoma rôznymiracionálnymi číslami leží nekonečne veľa racionálnych čísel, ale toto hustéusporiadanie má „medzery“, t. j. existuje rozklad množiny racionálnych číselna dve také neprázdne podmnožiny A a B, že platí:
(1) A ∪B je množina všetkých racionálnych čísel(2) pre každé číslo a ∈ A a pre každé číslo b ∈ B platí a < b(3) množina A nemá najväčší prvok a množina B nemá najmenší prvok.
Takýmto rozkladom môžu byť napríklad množiny B = b ∈ Q+ : b2 > 2 aA = Q−B.
Ak vyplníme tieto „medzery“ medzi racionálnymi číslami novými číslamitzv. iracionálnymi číslami, potom dostaneme reálne čísla, ktoré označímepísmenom R.
Definícia 1.1.1 Ak reálne číslo a je kladné, potom píšeme a > 0. Hovoríme,že číslo a je menšie ako číslo b, ak b− a > 0 a píšeme a < b. Ak reálne čísloa je záporné, potom píšeme a < 0. Hovoríme, že číslo a je väčšie ako číslo b,ak a − b > 0 a píšeme a > b. Zápis a 5 b znamená, že a < b alebo a = b.Analogicky chápeme aj zápis a = b.
Veta 1.1.1 Množina reálnych čísel je usporiadaná vzhľadom na reláciu <.Toto usporiadanie má nasledujúce vlastnosti:
(1) Pre každé dve reálne čísla a a b nastane práve jedna z možností:a < b alebo a > b alebo a = b.

11 1.1 Množina reálnych čísel a ďalšie číselné množiny
(2) Pre každé a, b, c ∈ R: a < b ∧ b < c ⇒ a < c.(3) Pre každé a, b, c, d ∈ R: a < b ∧ c ≤ d ⇒ a+ c < b+ d.(4) Pre každé a, b, c ∈ R: a < b ∧ c > 0 ⇒ ac < bc.(5) Pre každé a, b, c ∈ R: a < b ∧ c < 0 ⇒ ac > bc.
Veta 1.1.2 Reálne čísla môžme sčítavať, odčítavať, násobiť a deliť. Pre tietobinárne operácie platia nasledujúce pravidlá (predpokladáme, že a, b, c ∈ R):
(1) asociatívny zákon pre sčítanie:(a+ b) + c = a+ (b+ c),
(2) komutatívny zákon pre sčítanie:a+ b = b+ a,
(3) asociatívny zákon pre násobenie:(a · b) · c = a · (b · c),
(4) komutatívny zákon pre násobenie:a · b = b · a,
(5) distributívny zákon:(a+ b) · c = a · c+ b · ca · (b+ c) = a · b+ a · c.
(6) Pre každé a platí: a+ 0 = a.(7) Pre každé a platí: a · 1 = a.(8) Ku každému číslu a existuje také číslo −a, že platí: a+ (−a) = 0.(9) Ku každému číslu a 6= 0 existuje také číslo a−1 ∈ R: a · a−1 = 1.
Veta 1.1.3 Každé racionálne číslo q ∈ Q môžme napísať v tvare q = ab, kde
a ∈ Z a b ∈ N.
Veta 1.1.4 Každé iracionálne čísla r ∈ R−Q môžme vyjadriť nekonečnýmneperiodickým desatinným zápisom. Racionálne čísla q ∈ Q môžme vyjadriťkonečným zlomkom alebo nekonečným periodickým desatinným zápisom.
Veta 1.1.5 Racionálne čísla môžme usporiadať takto:Ak q, r ∈ Q, q = a
ba r = c
d, kde a, c ∈ Z a b, d ∈ N, potom platí:
(1) q < r, ak a · d < b · c,(2) q = r, ak a · d = b · c,(3) q > r, ak a · d > b · c.
Definícia 1.1.2 Reálne číslo α sa nazýva algebraické, ak je koreňom nejakejalgebraickej rovnice xn+a1 ·xn−1 +a2 ·xn−2 +a3 ·xn−3 + · · ·+an−1 ·x1 +an = 0s racionálnymi koeficientami a1, a2, a3, . . . , an. Ak číslo α nie je algebraické,tak sa nazýva transcendentné. Transcendentné sú napríklad čísla π alebo e.

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 12
Definícia 1.1.3 Množina K ⊆ R reálnych čísel sa nazýva zhora ohraničená,ak existuje také reálne číslo M , že M je väčšie ako všetky čísla z množiny K.
Množina K ⊆ R reálnych čísel sa nazýva zdola ohraničená, ak existujetaké reálne číslo m, že m je menšie ako všetky čísla z množiny K.
Množina K sa nazýva ohraničená, ak je ohraničená zhora aj zdola.Nech K ⊆ R. Horným ohraničením množiny K nazývame každé reálne
číslo h ∈ R, pre ktoré platí: ∀x ∈ K je x ≤ h.Nech K ⊆ R. Dolným ohraničením množiny K nazývame každé reálne
číslo d ∈ R, pre ktoré platí: ∀x ∈ K je x ≥ d.
Definícia 1.1.4 Najmenšie horné ohraničenie množiny K ⊆ R sa nazývasuprémum množiny K. Označíme ho supK. Najväčšie dolné ohraničeniemnožiny K sa nazýva infimum množiny K. Označíme ho inf K.
Veta 1.1.6 Každá zhora ohraničená neprázdna množina reálnych čísel másuprémum. Každá zdola ohraničená neprázdna množina reálnych čísel máinfimum.
Na základe vyššie uvedenej vety je zrejmé, že usporiadanie reálnych číselnemá „medzery“.
Veta 1.1.7 Nech K ⊆ R. Maximom množiny K nazývame také reálne čísloM ∈ K, pre ktoré platí: ∀x ∈ K je x 5M .
Nech K ⊆ R. Minimom množiny K nazývame také reálne číslo m ∈ K,pre ktoré platí: ∀x ∈ K je x = m.
Ak množina K ⊆ R reálnych čísel má najväčší prvok (t. j. prvok M jemaximom množiny K, M = maxK), potom supK = maxK.
Ak množina K ⊆ R reálnych čísel má najmenší prvok (t. j. prvok m jeminimom množiny K, m = minK), potom inf K = minK.
Veta 1.1.8 Medzi dvomi rôznymi reálnymi číslami leží nekonečne veľa ra-cionálnych čísel a nekonečne veľa iracionálnych čísel.
Poznámka 1.1.1 Nech je daná množina K ⊆ R. Pre množinu K platí, žeinf K a supK môžu, ale nemusia patriť do danej množiny K. Vyplýva toz tvrdenia vety 1.1.7.
Poznámka 1.1.2 (Číselná os) Reálne čísla znázorňujeme ako body napriamke. Ak zvolíme na priamke p počiatočný bod O, určitú orientáciupriamky p a jednotku dĺžky l, potom každému reálnemu číslu a prislúcha

13 1.2 Reálna funkcia jednej reálnej premennej
práve jeden bod A na priamke p so súradnicou a. Naopak, každý bod napriamke p má určitú súradnicu, ktorá zodpovedá nejakému reálnemu číslu.Priamku p nazývame číselná os.
Body na číselnej osi často priamo stotožňujeme s reálnymi číslami. Reálnečíslo a je menšie ako reálne číslo b, ak bod a leží na číselnej osi skôr ako bodb vzhľadom na jej orientáciu (t. j. pri obvyklej orientácii číselnej osi leží boda naľavo od bodu b).
1.2 Reálna funkcia jednej reálnej premennejDefinícia 1.2.1 Hovoríme, že na neprázdnej množine A ⊆ R je definovanáfunkcia f : A −→ B, ak ku každému prvku x ∈ A je podľa nejakého pravidlaf priradené jediné reálne číslo y ∈ B (označme ho f(x)). Potom premennú xnazývame nezávislou premennou a premennú y nazývame závislou premen-nou alebo funkčnou hodnotou. Množinu A nazývame definičný obor funkcie fa označujeme ho D(f). Množinu všetkých funkčných hodnôt f(x) nazývameoborom hodnôt funkcie f a označíme ho H(f). Funkciu f jednej reálnejpremennej x zadanú predpisom f(x) zapíšeme takto: f : y = f(x). Grafomfunkcie f je množina Gf = [x, y] : y = f(x); x ∈ A.
Definícia 1.2.2 Nech funkcia f má definičný obor D(f) a nech M ⊆ D(f).Ak pre každá dve čísla x1, x2 ∈M také, že x1 < x2 a platí:
(a) f(x1) < f(x2), tak hovoríme, že funkcia f je rastúca na množine M ,
(b) f(x1) > f(x2), tak hovoríme, že funkcia f je klesajúca na množine M ,
(c) f(x1) 5 f(x2), tak hovoríme, že funkcia f je neklesajúca na množineM ,
(d) f(x1) = f(x2), tak hovoríme, že funkcia f je nerastúca na množine M .
Poznámka 1.2.1 Ak sú funkcie rastúce, klesajúce, nerastúce alebo nekle-sajúce, tak takéto funkcie nazývame monotónne. Funkcie rastúce a funkcieklesajúce sa nazývajú rýdzo-monotónne funkcie.
Definícia 1.2.3 Nech je daná funkcia f s definičným oborom D(f). Nechpre všetky x ∈ D(f) je aj −x ∈ D(f). Potom hovoríme, že
(1) funkcia f je párna, ak pre všetky x ∈ D(f) platí: f(−x) = f(x),(2) funkcia f je nepárna, ak pre všetky x ∈ D(f) platí: f(−x) = −f(x).

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 14
Poznámka 1.2.2 Graf párnej funkcie je symetrický podľa osi oy. Graf ne-párnej funkcie je symetrický vzhľadom na začiatok súradného systému, t. j.bod O = [0, 0].
Definícia 1.2.4 Nech funkcia f má definičný obor D(f) a nech p je kladnéreálne číslo. Hovoríme, že funkcia f je periodická s periódou p, ak
(1) ∀x ∈ D(f): x+ p ∈ D(f) a(2) ∀x ∈ D(f): f(x+ p) = f(x).
Poznámka 1.2.3 Najmenšie kladné reálne číslo p s uvedenými vlastnosťamisa nazýva perióda funkcie f .
Definícia 1.2.5 Nech sú dané funkcie g: z = g(x) z množina A do množinyC a h: y = f(x) z množiny C do množiny B (kde A, B a C sú podmnožinymnožiny reálnych čísel). Potom funkciu F : y = F (x) = f(g(x)) z množinyA do množiny B nazývame zloženou funkciou z funkcií f a g, pričom g sanazýva vnútorná (vedľajšia) zložka a funkcia f sa nazýva vonkajšia (hlavná)zložka zloženej funkcie F .
Definícia 1.2.6 Hovoríme, že funkcia f : y = f(x) je prostá (jednoznačná),ak pre každé x1, x2 ∈ D(f) také, že x1 6= x2 platí: f(x1) 6= f(x2).
Definícia 1.2.7 Nech funkcia f : y = f(x) je prostá s definičným oboromD(f) a oborom hodnôt H(f). Funkciu, ktorá priradí každému reálnemu čísloy ∈ H(f) také číslo x ∈ D(f), pre ktoré platí y = f(x), nazývame inverznoufunkciou k funkcii f a označujeme ju symbolom f−1. Pre inverznú funkciuf−1 k funkcii f platí: D(f−1) = H(f) a H(f−1) = D(f).
Poznámka 1.2.4 Grafy funkcií f a f−1 sú symetrické vzhľadom na priamkup: y = x. Pre všetky x ∈ D(f) platí, že f−1(f(x)) = x a pre všetky y ∈ D(f−1)platí, že f(f−1(y)) = y. Inverzná funkcia existuje len k prostej funkcii.
ELEMENTÁRNE FUNKCIE
Konštantná funkciaVšeobecný tvar konštantnej funkcie f je f : y = k, kde k ∈ R. Definičným
oborom konštantnej funkcie je množina všetkých reálnych čísel, D(f) = R.Oborom hodnôt je jednoprvková množina s prvkom k, H(f) = k. Grafom

15 1.2 Reálna funkcia jednej reálnej premennej
x
y
0 1 2 4−1−4
1
4
−1
−4
f1
f2
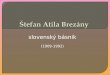
Obr. 1: Funkcia f1(x) je daná predpisom f1 : y = 3 a funkcia f2(x) je danápredpisom f2 : y = −2
konštantnej funkcie je priamka rovnobežná s osou x, ktorá pretína os y v bode[0, k]. Pozri obrázok 1.
Lineárna funkciaVšeobecný tvar lineárnej funkcie f je f : y = a ·x+b, kde a, b ∈ R a a 6= 0.
Definičný obor funkcie f a aj obor hodnôt funkcie f tvorí množina reálnychčísel, D(f) = H(f) = R. Grafom lineárnej funkcie je priamka. Koeficientylineárnej funkcie a a b majú nasledujúci význam:1
a = tgϕ – smernica priamky, ktorá je grafom lineárnej funkcie.a > 0 – lineárna funkcia je rastúcaa < 0 – lineárna funkcia je klesajúcab – úsek vyťatý priamkou na osi yb = 0 – priamka prechádzajúca počiatkom súradnicového systémua = 0 – priamka je rovnobežná s osou x
1ϕ je uhol, ktorý zviera priamka (graf lineárnej funkcie) s kladnou orientáciou osi x

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 16
Príkladom lineárnej funkcie môžu byť funkcie na obrázku 2, kde funkciaf1 je daná predpisom y = x. Grafom funkcie f1 je priamka, ktorá pretína os yv bode [0, 0] a funkcia f1 je rastúca. Funkcia f2 je daná predpisom y = x+ 2.Graf funkcie f2 vznikol posunutím grafu funkcie f1 v kladnom smere osi yo +2. Grafom je priamka, ktorá pretína os y v bode [0, 2] a funkcia f2 jerastúca. Funkcia f3 je daná predpisom y = −x−1. Grafom je priamka, ktorápretína os y v bode [0,−1] a funkcia f3 je klesajúca.
x
y
0 1 2 4−1−4
1
4
−1
−4
f1
f2
f3
Obr. 2: Lineárna funkcia: grafy funkcií f1(x), f2(x) a f3(x)
Kvadratická funkciaKvadratická funkcia f má tvar f : y = a · x2 + b · x + c, kde a, b, c ∈ R
a a 6= 0. Definičný obor funkcie f tvorí množina reálnych čísel, D(f) = Ra oborom hodnôt kvadratickej funkcie je množina H(f) = 〈− b2
4·a + c,∞), aka > 0 alebo H(f) = (−∞,− b2
4·a + c〉, ak a < 0. Grafom kvadratickej funkcieje parabola, ktorej os je rovnobežná s osou y. Pre kladné hodnoty parametraa je parabola otvorená smerom hore a pre záporné hodnoty parametra a je

17 1.2 Reálna funkcia jednej reálnej premennej
parabola otvorená smerom dole. Vrchol paraboly V má súradnice:
V =[−b2 · a,−
b2
4 · a + c
].
Špeciálne tvary kvadratickej funkcie:
f : y = a · x2 – parabola s vrcholom v bode V = [0, 0],f : y = a · x2 + c – parabola s vrcholom v bode V = [0, c],f : y = a · (x+ d)2 – parabola s vrcholom v bode V = [−d, 0],f : y = a · (x+ d)2 + k – parabola s vrcholom v bode V = [−d, k],f : y = x2 + p · x+ q – normovaná parabola s vrcholom v bode
V =[−p
2 ,−(p2
)2+ q
].
Na obrázku 3 sú zobrazené grafy troch kvadratických funkcií f1(x), f2(x) af3(x). Funkcia f2(x) je daná predpisom f2: y = x2, ktorej grafom je parabolas vrcholom v bode [0, 0], ktorý je minimom funkcie f2. Funkcia f3(x) je danápredpisom f3: y = x2−4, ktorej grafom je parabola s vrcholom v bode [0,−4].Tento vrchol je minimom funkcie f3. Funkcia f1(x) je daná predpisom f1:y = 4− x2, ktorej grafom je parabola. Funkcia f1 nadobúda vo vrchole [0, 4]maximum funkcie f1.
Mocninová funkcia:Mocninová funkcia f má tvar f : y = a · xk, kde k ∈ N a a ∈ R − 0.
Definičným oborom mocninovej funkcie je množina všetkých reálnych čísel,D(f) = R.
• pre a > 0 a k = 2n, n ∈ N je grafom funkcie f parabola k-tehostupňa s vrcholom v počiatku súradnicového systému V = [0, 0], ktoráje otvorená smerom hore a oborom hodnôt je množina H(f) = 〈0,∞),
• pre a < 0 a k = 2n, n ∈ N je grafom funkcie f parabola k-tehostupňa s vrcholom v počiatku súradnicového systému V = [0, 0], ktoráje otvorená smerom dole a oborom hodnôt je množinaH(f) = (−∞, 0〉,
• pre a > 0 a k = 2n + 1, n ∈ N je grafom funkcie f parabola k-teho stupňa, ktorá leží v prvom a treťom kvadrante, ktorej stredomsúmernosti je počiatok súradnicového systému, bod V = [0, 0] a oboromhodnôt je množina H(f) = R,

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 18
x
y
0 1 2 4−1−4
1
4
−1
−4
f1
f2
f3
Obr. 3: Kvadratická funkcia: grafy funkcií f1(x), f2(x) a f3(x)
• pre a < 0 a k = 2n + 1, n ∈ N je grafom funkcie f parabola k-teho stupňa, ktorá leží v druhom a štvrtom kvadrante, ktorej stredomsúmernosti je počiatok súradnicového systému, bod V = [0, 0] a oboromhodnôt je množina H(f) = R.
Ak exponent k môže nadobúdať aj záporné hodnoty, tak dostaneme funkciuv tvare f : y = a · x−k, kde k ∈ N a a ∈ R − 0. Definičným oborom tejtofunkcie je množina všetkých reálnych čísel okrem nuly, D(f) = R− 0.
• pre a > 0 a k = 2n, n ∈ N je grafom funkcie f hyperbola k-teho stupňa,ktorá leží v prvom a druhom kvadrante a oborom hodnôt je množinaH(f) = (0,∞),

19 1.2 Reálna funkcia jednej reálnej premennej
• pre a < 0 a k = 2n, n ∈ N je grafom funkcie f hyperbola k-teho stupňa,ktorá leží v treťom a štvrtom kvadrante a oborom hodnôt je množinaH(f) = (−∞, 0),
• pre a > 0 a k = 2n + 1, n ∈ N je grafom funkcie f hyperbola k-teho stupňa, ktorá leží v prvom a treťom kvadrante, ktorej stredomsúmernosti je počiatok súradnicového systému, bod V = [0, 0] a oboromhodnôt je množinaH(f) = R−0. Pre n = 0 dostávame funkciu y = 1
x
(nepriama úmernosť), pre ktorú platí: f = f−1 a jej grafom je rovnoosáhyperbola.,
• pre a < 0 a k = 2n + 1, n ∈ N je grafom funkcie f hyperbola k-teho stupňa, ktorá leží v druhom a štvrtom kvadrante, ktorej stredomsúmernosti je počiatok súradnicového systému, bod V = [0, 0] a oboromhodnôt je množina H(f) = R− 0.
Ak by sme exponent k zvolili z množiny racionálnych čísel, tak získamegrafy funkcií, ktoré zodpovedajú odmocninám z reálnych čísel. Príkladomtakejto funkcie môžu byť funkcie zobrazené na obrázku 4. Tieto funkcie majúnasledujúce predpisy: f1: y =
√x, f2: y =
√x− 2 a f3: y = 2−
√x.
x
y
4 5 6 830
1
4
−1
−4
f1
f2
f3
Obr. 4: Funkcia druhá odmocnina: grafy funkcií f1(x), f2(x) a f3(x)

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 20
Exponenciálna funkciaExponenciálna funkcia f má tvar f : y = ax, kde a > 0 a a 6= 1. Definičným
oborom exponenciálnej funkcie je množina všetkých reálnych čísel,D(f) = R.Oborom hodnôt je množina kladných reálnych čísel, H(f) = (0,∞). Gra-fom exponenciálnej funkcie je exponenciálna krivka, ktorá prechádza bodom[0, 1]. Funkcia je prostá. Rastie pre hodnoty a > 1 a klesá pre hodnotya ∈ (0, 1). Medzi najvýznamnejšie exponenciálne funkcie patrí funkcia y = ex,kde e = 2,7182818 . . . (známe Eulerovo číslo), ktorá sa nazýva prirodzenáexponenciálna funkcia. Exponenciálna funkcia patrí medzi transcendentnéfunkcie.
Príklady grafov exponenciálnych funkcií sú zobrazené na obrázku 5. Funk-cia f1 má predpis y = ex. Pretína os y v bode [0, 1] a je rastúca. Funkcia f2má predpis y = ex5 . Os y pretína v bode [0, 1] a tiež je to rastúca a prostáfunkcia. Funkcia f3 má funkčný predpis y = 4−ex. Os y pretína v bode [0, 3].Funkcia f3 je klesajúca a prostá.
Logaritmická funkciaLogaritmická funkcia je inverznou funkciou k odpovedajúcej exponenciál-
nej funkcii. Všeobecný tvar logaritmickej funkcie jef : y = loga x, kde a > 0a a 6= 1. Definičným oborom logaritmickej funkcie je množina všetkých klad-ných reálnych čísel, D(f) = (0,∞). Oborom hodnôt je množina všetkých re-álnych čísel, H(f) = R. Grafom logaritmickej funkcie je logaritmická krivka,ktorá prechádza bodom [1, 0]. Funkcia je prostá. Rastie pre hodnoty a > 1a klesá pre hodnoty a ∈ (0, 1). Medzi najvýznamnejšie logaritmické funkciepatria funkcia y = loge x = ln x, kde e = 2,7182818 . . . , ktorá sa nazýva pri-rodzená logaritmická funkcia (prirodzený logaritmus) a y = log10 x = log x,ktorý nazývame dekadický logaritmus. Logaritmická funkcia tiež patrí medzitranscendentné funkcie.
Na obrázku 6 sú zobrazené príklady logaritmickej funkcie. Funkcia f1:y = ln x. Os x pretína v bode [1, 0] a je rastúca. Graf funkcie f2: y = 2 · ln xpretína os x v bode [1, 0]. Je to rastúca a prostá funkcia. Funkcia f3: y =2− ln x je prostá a klesajúca.
Goniometrické funkcieGoniometrické funkcie je spoločný názov pre funkcie sínus (symbolicky
y = sin x), kosínus (y = cosx), tangens (y = tg x) a kotangens (y =cotg x). Definičným oborom funkcií sínus a kosínus je množina všetkých re-álnych čísel, D(f) = R a oborom hodnôt je uzavretý interval medzi −1 a

21 1.2 Reálna funkcia jednej reálnej premennej
x
y
0 1 2 4−1−4
1
5
−1
−4
f1
f2
f3
Obr. 5: Exponenciálna funkcia: grafy funkcií f1(x), f2(x) a f3(x)
1, H(f) = 〈−1, 1〉. Definičným oborom funkcie tangens je množina D(f) =R−π2 +kπ, k ∈ Z a funkcie kotangens je množina D(f) = R−kπ, k ∈ Z.Oborom hodnôt funkcií tangens aj kotangens je množina všetkých reálnychčísel,H(f) = R. Goniometrické funkcie sú periodické. Funkcie sínus a kosínus

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 22
x
y
4 5 61 30
1
4
−1
−4
f1
f2
f3
Obr. 6: Logaritmická funkcia: grafy funkcií f1(x), f2(x) a f3(x)
majú periódu 2π a funkcie tangens a kotangens majú periódu π. Pre tietofunkcie platia nasledujúce rovnosti pre všetky x ∈ D(f):
sin x = sin(x+ 2π · k) pre ∀k ∈ Z,cosx = cos(x+ 2π · k) pre ∀k ∈ Z,tg x = tg (x+ k · π) pre ∀k ∈ Z,cotg x = cotg (x+ k · π) pre ∀k ∈ Z.
Grafy goniometrických funkcií sú:
f1 = [x, y] : y = sin x, x ∈ R, y ∈ 〈−1, 1〉 (sínusoida),f2 = [x, y] : y = cosx, x ∈ R, y ∈ 〈−1, 1〉 (kosínusoida),f3 = [x, y] : y = tg x, x ∈ R− π2 + kπ, k ∈ Z, y ∈ R (tangentoida),f4 = [x, y] : y = cotg x, x ∈ R− kπ, k ∈ Z, y ∈ R (kotangentoida).
Na obrázkoch 7, 8, 9 a 10 sú znázornené grafy goniometrických funkciísínus, kosínus, tangens a kotangens. Funkcia sin x je na obrázku 7 ako funkciaf1. Funkcia f2 má predpis y = 1 + sin x. Graf funkcie f3 má funkčný predpisy = −2 · sin x.

23 1.2 Reálna funkcia jednej reálnej premennej
x
y
1
π2
−2π 2π−π π−π2
0
3
−1
−3
f1
f2
f3
Obr. 7: Funkcia sínus: grafy funkcií f1(x), f2(x) a f3(x)
Funkcia cosx je na obrázku 8. Graf funkcie f1 má funkčný predpis y =cosx. Funkcia f2 má predpis y = 1+cos x a graf funkcie f3 je daný predpisomy = 3 · cosx. Na obrázku 9 je znázornený graf funkcie f : y = tg x a naobrázku 10 je znázornený graf funkcie f : y = cotg x. Body, ktoré nepatria dodefiničného oboru týchto dvoch funkcií, sú znázornené priamkami kolmýmina os x.
x
y
1
π2
−2π 2π−π π−π2
0
3
−1
−3
f1f2
f3
Obr. 8: Funkcia kosínus: grafy funkcií f1(x), f2(x) a f3(x)

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 24
x
y
0 π2−3π
23π2
−π π−π2
−1
1
3
−3
−5
f
Obr. 9: Funkcia tangens: graf funkcie f : y = tg x
Cyklometrické funkcieGoniometrické funkcie nie sú prosté na svojom definičnom obore, preto
k ním neexistujú inverzné funkcie. Ak zúžime definičný obor na vhodný in-terval tak, aby na ňom bola funkcia prostá, potom môžeme k ním definovaťinverzné funkcie. Takto vytvorené inverzné funkcie ku goniometrickým fun-kciám nazývame cyklometrické funkcie.
1. Funkcia arkussínus: Funkcia y = sin x je rastúca a prostá na uzavretomintervale 〈−π
2 ,π2 〉 a zobrazuje tento interval na uzavretý interval 〈−1, 1〉.
Inverzná funkcia k funkcii sin x, pre x ∈ 〈−π2 ,
π2 〉 ⊆ D(f) je funkcia
arkussínus, y = arcsin x. Definičným oborom funkcie y = arcsin x jeinterval D(f) = 〈−1, 1〉 a oborom hodnôt je interval H(f) = 〈−π
2 ,π2 〉.
Funkcia je rastúca a prostá na intervale 〈−1, 1〉.
2. Funkcia arkuskosínus: Funkcia y = cosx je klesajúca a prostá na uzav-retom intervale 〈0, π〉 a zobrazuje tento interval na uzavretý interval

25 1.2 Reálna funkcia jednej reálnej premennej
x
y
0 π2−3π
2−2π 3π
2−π π 2π−π
2
−1
1
2
5
−3
−5
f
Obr. 10: Funkcia kotangens: graf funkcie f : y = cotg x
〈−1, 1〉. Inverzná funkcia k funkcii cosx, pre x ∈ 〈0, π〉 ⊆ D(f) je funk-cia arkuskosínus, y = arccosx. Definičným oborom funkcie y = arccosxje interval D(f) = 〈−1, 1〉 a oborom hodnôt je interval H(f) = 〈0, π〉.Funkcia je klesajúca a prostá na intervale 〈−1, 1〉.
3. Funkcia arkustangens: Funkcia y = tg x je rastúca a prostá na otvo-renom intervale
(−π
2 ,π2
)a zobrazuje tento interval na množinu všet-
kých reálnych čísel (−∞,∞). Inverzná funkcia k funkcii tg x, pre x ∈(−π
2 ,π2
)⊆ D(f) je funkcia arkustangens, y = arctg x. Definičným obo-
rom funkcie y = arctg x je množina všetkých reálnych čísel D(f) = R aoborom hodnôt je intervalH(f) =
(−π
2 ,π2
). Funkcia je rastúca a prostá
na množine (−∞,∞).
4. Funkcia arkuskotangens: Funkcia y = cotg x je klesajúca a prostá naotvorenom intervale (0, π) a zobrazuje tento interval na množinu všet-kých reálnych čísel (−∞,∞). Inverzná funkcia k funkcii cotg x, prex ∈ (0, π) ⊆ D(f) je funkcia arkuskotangens, y = arccotg x. Definič-ným oborom funkcie y = arccotg x je množina všetkých reálnych číselD(f) = R a oborom hodnôt je interval H(f) = (0, π). Funkcia je kle-sajúca a prostá na množine (−∞,∞).

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 26
1.3 Limita funkcieDefinícia 1.3.1 Hovoríme, že funkcia f : y = f(x) má v bode a limituzprava rovnú číslu L, ak platí: (∀ε > 0)(∃δ > 0)(∀x ∈ (a; a + δ) : (0 <|x− a| < δ =⇒ |f(x)− L| < ε)). Píšeme:
limx→a+
f(x) = L
Definícia 1.3.2 Hovoríme, že funkcia f : y = f(x) má v bode a limitu zľavarovnú číslu L, ak platí: (∀ε > 0)(∃δ > 0)(∀x ∈ (a − δ; a) : (0 < |x − a| <δ =⇒ |f(x)− L| < ε)). Píšeme:
limx→a−
f(x) = L
Definícia 1.3.3 Hovoríme, že funkcia f : y = f(x) má v bode a limiturovnú číslu L, ak má limitu zľava aj zprava, t.j. platí: (∀ε > 0)(∃δ > 0)(∀x ∈(a− δ; a+ δ) : (0 < |x− a| < δ =⇒ |f(x)− L| < ε)). Píšeme:
limx→a
f(x) = L
Veta 1.3.1 Ak limx→c
g(x) = b a g(x) 6= b v istom okolí bodu c a limz→b
f(z) = a,tak lim
x→cf(g(x)) = a.
Veta 1.3.2 (Základné pravidlá pre počítanie s limitami) Nech sú danéfunkcie f : y = f(x) a g: y = g(x). Nech lim
x→cf(x) = a ∈ R a lim
x→cg(x) = b ∈ R.
Potom platí:
(1) limx→c|f(x)| = |a|,
(2) limx→c
(f(x) + g(x)) = limx→c
f(x) + limx→c
g(x) = a+ b,
(3) limx→c
(f(x)− g(x)) = limx→c
f(x)− limx→c
g(x) = a− b,
(4) limx→c
(f(x) · g(x)) = limx→c
f(x) · limx→c
g(x) = a · b,

27 1.3 Limita funkcie
(5) Ak pre všetky x z okolia bodu c je g(x) 6= 0 a limx→c
g(x) 6= 0, tak
limx→c
(f(x)g(x)
)=
limx→c
f(x)
limx→c
g(x) = ab.
Veta 1.3.3 Nech sú dané funkcie f : y = f(x) a g: y = g(x). Nech limx→c
f(x) =0 a funkcia g je ohraničená funkcia. Potom lim
x→c(f(x) · g(x)) = 0.
Veta 1.3.4 Nech sú dané funkcie f : y = f(x) a g: y = g(x). Potom platí:
(1) ak limx→c
f(x) =∞, tak limx→c
(−f(x)) = −∞,
(2) ak limx→c
f(x) = −∞, tak limx→c
(−f(x)) =∞,
(3) ak limx→c
f(x) = −∞ alebo limx→c
(−f(x)) =∞, tak limx→c|f(x)| =∞,
(4) ak limx→c
f(x) = ∞ a množina H(g) (obor hodnôt funkcie g) je zdolaohraničená, tak lim
x→c(f(x) + g(x)) =∞,
(5) ak f(x) > 0 a limx→c
f(x) = 0, tak limx→c
1f(x) =∞.
(6) ak limx→c|f(x)| =∞, tak lim
x→c1
f(x) = 0.
Základné vzorce na výpočet limít 2
(1) limx→0
sinxx
= 1[
00
](2) lim
x→0ex−1x
= 1[
00
](3) lim
x→∞
(1 + 1
x
)x= e [1+∞]
(4) limx→−∞
(1 + 1
x
)x= e [1−∞]
(5) limx→0
1x
= neexistuje[
10
](6) lim
x→0−1x
= −∞[
10−]
(7) limx→0+
1x
=∞[
10+
](8) lim
x→∞ax =∞, pre a > 1 [a∞]
2V hranatých zátvorkách je uvedený typ limity.

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 28
(9) limx→∞
ax = 1, pre a = 1 [a∞](10) lim
x→∞ax = 0, pre a ∈ (0, 1) [a∞]
(11) limx→−∞
ax = 0, pre a > 1 [a−∞](12) lim
x→−∞ax = 1, pre a = 1 [a−∞]
(13) limx→−∞
ax =∞, pre a ∈ (0, 1) [a−∞](14) lim
x→∞ex =∞ [e∞]
(15) limx→−∞
ex = 0 [e−∞](16) lim
x→0+ln x = −∞ [ln 0]
(17) limx→∞
ln x =∞ [ln∞](18) lim
x→∞xn =∞, pre n ∈ N [∞n]
(19) limx→−∞
xn =∞, pre n ∈ N, n párne [(−∞)n](20) lim
x→−∞xn = −∞, pre n ∈ N, n nepárne [(−∞)n]
(21) limx→±∞
1xn
= 0, pre n ∈ N[
1(±∞)n
](22) lim
x→01xn
=∞, pre n ∈ N, n párne[
1(0)n
](23) lim
x→01xn
= neexistuje, pre n ∈ N, n nepárne[
1(0)n
](24) lim
x→0−1xn
= −∞, pre n ∈ N, n nepárne[
1(0−)n
](25) lim
x→0+1xn
=∞, pre n ∈ N, n nepárne[
1(0+)n
](26) lim
x→(π2 )−tg x =∞
[tg π
2
](27) lim
x→(π2 )+tg x = −∞
[tg π
2
](28) lim
x→0−cotg x = −∞ [cotg 0]
(29) limx→0+
cotg x =∞ [cotg 0](30) lim
x→∞arctg x = π
2 [arctg∞](31) lim
x→−∞arctg x = −π
2 [arctg −∞](32) lim
x→∞arccotg x = 0 [arccotg∞]
(33) limx→−∞
arccotg x = π [arccotg −∞](34) lim
x→±∞sin x = neexistuje [sin±∞]
(35) limx→±∞
cosx = neexistuje [cos±∞]

29 1.3 Limita funkcie
Poznámka 1.3.1 Pri výpočte limity funkcie limx→c
f(x) môžeme dostať takétovýsledky:
• limx→c
f(x) = b, b ∈ R – existuje vlastná limita,
• limx→c
f(x) = ±∞ – existuje nevlastná limita,
• limita limx→c
f(x) neexistuje, ale existujú jednostranné limity, pre ktoréplatí: lim
x→c−f(x) = a a lim
x→c+f(x) = b a a 6= b,
• limita nemá zmysel (nie je definovaná), pretože funkcia f nie je defino-vaná v okolí bodu c resp. v pravom alebo v ľavom okolí bodu c.
Definícia 1.3.4 Nech funkcia f je definovaná v nejakom okolí bodu a ∈ I ⊆D(f). Hovoríme, že funkcia f je spojitá v bode a, ak platí lim
x→af(x) = f(a)
t. j. (∀ε > 0)(∃δ > 0)(∀x ∈ I : |x − a| < δ)(|f(x) − f(a)| < ε). Hovoríme,že funkcia f je spojitá v bode a sprava, ak lim
x→a+f(x) = f(a). Hovoríme, že
funkcia f je spojitá v bode a zľava, ak limx→a−
f(x) = f(a).
Definícia 1.3.5 Funkcia f je spojitá, ak je spojitá v každom bode definič-ného oboru funkcie f . Funkcia f je spojitá na množine I ⊆ D(f), ak jespojitá v každom bode množiny I.
Definícia 1.3.6 Hovoríme, že funkcia f je spojitá na otvorenom intervale(a, b), ak je spojitá v každom bode tohto intervalu. Hovoríme, že funkcia f jespojitá na uzavretom intervale 〈a, b〉, ak je spojitá v každom bode intervalu(a, b) a naviac je spojitá v bode a sprava a spojitá v bode b zľava.
Veta 1.3.5 Ak je funkcia f spojitá sprava a súčasne aj zľava v bode a, takje spojitá v bode a.
Veta 1.3.6 Nech funkcie f : y = f(x) a g: y = g(x) sú spojité v bode a ∈D(f) a nech α ∈ R. Potom v bode a sú spojité aj funkcie f + g, f − g, α · f ,f · g, |f |. Ak platí, že g(a) 6= 0, tak v bode a je spojitá aj funkcia f
g.
Veta 1.3.7 Nech funkcia f : y = f(x) je spojitá v bode a a funkcia g: y =g(x) je spojitá v bode f(a), potom funkcia y = f(g(x)) je spojitá v bode a.

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 30
Veta 1.3.8 Každá elementárna funkcia je spojitá na svojom definičnom obore.
Veta 1.3.9 Nech funkcia f je spojitá na uzavretom intervale 〈a, b〉. Potomfunkcia f nadobúda minimum aj maximum na intervale 〈a, b〉 a funkcia fnadobúda každú hodnotu medzi minimom a maximom.
Veta 1.3.10 Nech funkcia f je spojitá na uzavretom intervale 〈a, b〉 a nechf(a) · f(b) < 0. Potom existuje bod c ∈ (a, b) taký, že f(c) = 0.
Poznámka 1.3.2 Ak limx→a
f(x) = b, tak platí jedno z nasledujúcich tvrdení:
• Ak f(a) = b, tak funkcia f je spojitá v bode a.
• Ak f(a) 6= b, tak funkcia f nie je spojitá v bode a, ale je v bode adefinovaná.
• Ak existuje limx→a
f(x) = b, ale f(a) nie je definovaná, tak funkcia f nieje spojitá v bode a a súčasne funkcia f nie je definovaná v bode a.

31 1.4 Derivácia funkcie
1.4 Derivácia funkcieDefinícia 1.4.1 Nech funkcia f : y = f(x) je definovaná v okolí bodu x0 ∈D(f). Derivácia funkcie f v bode x0 je číslo:
f ′(x0) = limx→x0
f(x)− f(x0)x− x0
(1)
resp.
f ′(x0) = limh→0
f(x0 + h)− f(x0)h
(2)
Definícia 1.4.2 Hovoríme, že funkcia f : y = f(x) má v bode x0 ∈ R deri-váciu zľava, ak je definovaná v istom ľavom okolí bodu x0 ∈ D(f) a existujelimita:
f ′−(x0) = limx→x−0
f(x)− f(x0)x− x0
(3)
resp.
f ′−(x0) = limh→0−
f(x0 + h)− f(x0)h
(4)
Hovoríme, že funkcia f : y = f(x) má v bode x0 ∈ R deriváciu sprava, ak jedefinovaná v istom pravom okolí bodu x0 ∈ D(f) a existuje limita:
f ′+(x0) = limx→x+
0
f(x)− f(x0)x− x0
(5)
resp.
f ′+(x0) = limh→0+
f(x0 + h)− f(x0)h
(6)
Veta 1.4.1 Ak funkcia f má v bode x0 deriváciu, tak funkcia f je v tomtobode spojitá.
Veta 1.4.2 Nech je daná funkcia f : y = f(x) a bod x0 ∈ D(f) je vnútornýmbodom definičného oboru funkcie f . Funkcia f má v bode x0 deriváciu f ′(x0)práve vtedy, ak má v bode x0 deriváciu zľava f ′−(x0), deriváciu sprava f ′+(x0)a platí rovnosť: f ′−(x0) = f ′+(x0).

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 32
Veta 1.4.3 Nech je daná funkcia f : y = f(x) a bod T = [x0, y0], kde x0 ∈D(f), y0 ∈ H(f) a y0 = f(x0). Ak existuje derivácia funkcie f v bode x0(f ′(x0)), tak dotyčnica t ku grafu funkcie f v bode T má rovnicu:
t : y − y0 = f ′(x0) · (x− x0). (7)
Veta 1.4.4 Nech je daná funkcia f : y = f(x) a bod T = [x0, y0], kde x0 ∈D(f), y0 ∈ H(f) a y0 = f(x0). Ak existuje derivácia funkcie f v bode x0(f ′(x0)) a f ′(x0) 6= 0, tak normála n ku grafu funkcie f v bode T má rovnicu:
n : y − y0 = −1f ′(x0) · (x− x0). (8)
Veta 1.4.5 (Základné pravidlá derivovania) Nech funkcie f : y = f(x)a g: y = g(x) majú v bode x0 derivácie f ′(x0) a g′(x0). Necjh c ∈ R. Potomplatí:
(1) (c · f(x0))′ = c · f ′(x0),(2) (f(x0) + g(x0))′ = f ′(x0) + g′(x0),(3) (f(x0)− g(x0))′ = f ′(x0)− g′(x0),(4) (f(x0) · g(x0))′ = f ′(x0) · g(x0) + f(x0) · g′(x0),(5)
(f(x0)g(x0)
)′= f ′(x0)·g(x0)−f(x0)·g′(x0)
g2(x0) ,
Veta 1.4.6 (Derivácia zloženej funkcie) Nech zložená funkcia h: y =f(g(x)
)je definovaná na intervale (a, b) a nech x0 ∈ (a, b). Nech funkcia g
má v bode x0 deriváciu g′(x0) a nech funkcia f má v bode z0 = g(x0) deriváciuf ′(z0). Potom funkcia h má v bode x0 deriváciu h′(x0) = f ′(z0) · g′(x0).
Základné vzorce pre derivovanie
(1) (c)′ = 0, kde c je konštanta c ∈ R,(2) (x)′ = 1,(3) (xn)′ = n · xn−1, pre n ∈ R,(4) (sin x)′ = cosx, pre x ∈ R,(5) (cosx)′ = − sin x, pre x ∈ R,(6) (tg x)′ = 1
cos2 x, pre x ∈ R− (2k+1)π
2 ; k ∈ Z,

33 1.4 Derivácia funkcie
(7) (cotg x)′ = −1sin2 x
, pre x ∈ R− kπ; k ∈ Z,(8) (arcsin x)′ = 1√
1−x2 , pre x ∈ (−1, 1),(9) (arccosx)′ = −1√
1−x2 , pre x ∈ (−1, 1),(10) (arctg x)′ = 1
1+x2 , pre x ∈ R,(11) (arccotg x)′ = −1
1+x2 , pre x ∈ R,(12) (ln x)′ = 1
x, pre x ∈ (0,∞),
(13) (loga x)′ = 1x·ln a , kde a > 0 a a 6= 1, pre x ∈ (0,∞),
(14) (ex)′ = ex, pre x ∈ R,(15) (ax)′ = ax · ln a, kde a > 0 a a 6= 1, pre x ∈ R.
Ukážeme, ako derivovať funkciu, ktorá má tvar y = f(x)g(x), kde f(x) > 0pre všetky x ∈ D(f).
y′ =(f(x)g(x)
)′=(
eln(f(x)g(x)))′
=(eg(x)·ln f(x)
)′=(eg(x)·ln f(x)
)·[g(x)·ln f(x)
]′=
=(f(x)g(x)
)·[g′(x) · ln f(x) + g(x) · (ln f(x))′
]=
=(f(x)g(x)
)·[g′(x) · ln f(x) + g(x) · 1
f(x) · f′(x)
]Dostali sme ďalší derivačný vzorec v tvare:(
f(x)g(x))′
= f(x)g(x) ·[g′(x) · ln f(x) + g(x)
f(x) · f′(x)
](9)
Veta 1.4.7 Nech je daná funkcia f : y = f(x) a nech 〈a, b〉 ⊆ D(f). Nechfunkcia f nadobúda vo vnútornom bode c intervalu 〈a, b〉 najväčšiu resp.najmenšiu hodnotu. Ak funkcia f má v bode c deriváciu, tak platí f ′(c) = 0.
Veta 1.4.8 (Rolleho veta) Nech funkcia f : y = f(x) je spojitá na uzavre-tom intervale 〈a, b〉, má prvú deriváciu na otvorenom intervale (a, b) a platí,že f(a) = f(b). Potom na otvorenom intervale (a, b) existuje aspoň jeden bodξ taký, že f ′(ξ) = 0.
Veta 1.4.9 (Lagrangeova veta) Nech funkcia f : y = f(x) je spojitá nauzavretom intervale 〈a, b〉 a má prvú deriváciu na otvorenom intervale (a, b).Potom existuje aspoň jeden bod ξ na otvorenom intervale (a, b) taký, že
f ′(ξ) = f(b)− f(a)b− a
.

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 34
Veta 1.4.10 (Cauchyho veta) Nech funkcie f : y = f(x) a g: y = g(x)sú spojité na uzavretom intervale 〈a, b〉 a majú prvú deriváciu na otvorenomintervale (a, b). Nech g′(x) 6= 0 pre ∀x ∈ (a, b). Potom na otvorenom intervale(a, b) existuje aspoň jeden bod ξ taký, že
f ′(ξ)g′(ξ) = f(b)− f(a)
g(b)− g(a) .
Veta 1.4.11 (L‘Hospitalovo pravidlo) Nech funkcie f : y = f(x) a g:y = g(x) majú derivácie v prstencovom okolí bodu a ∈ R ∪ ±∞. Nechlimx→a
f(x) = limx→a
g(x) = 0 alebo limx→a|g(x)| = +∞. Ak existuje (vlastná alebo
nevlastná) limita limx→a
f ′(x)g′(x) , tak existuje aj limita lim
x→af(x)g(x) a platí:
limx→a
f(x)g(x) = lim
x→a
f ′(x)g′(x) .
Veta 1.4.12 Nech funkcia f : y = f(x) je spojitá na intervale I a má deri-váciu vo všetkých vnútorných bodoch intervalu I. Potom platí:
(1) Ak funkcia f je na intervale I neklesajúca, tak f ′(x) = 0 pre každývnútorný bod intervalu I.
(2) Ak funkcia f je na intervale I nerastúca, tak f ′(x) 5 0 pre každývnútorný bod intervalu I.
(3) Ak funkcia f je na intervale I rastúca, tak f ′(x) = 0 pre každý vnútornýbod intervalu I a f ′ je nenulová na každom otvorenom podintervaleintervalu I.
(4) Ak funkcia f je na intervale I klesajúca, tak f ′(x) 5 0 pre každývnútorný bod intervalu I a f ′ je nenulová na každom otvorenom pod-intervale intervalu I.
Veta 1.4.13 Nech funkcia f : y = f(x) je spojitá na intervale I a má deri-váciu vo všetkých vnútorných bodoch intervalu I. Potom platí:

35 1.4 Derivácia funkcie
(1) ak f ′(x) > 0 pre každý vnútorný bod intervalu I, tak f je rastúca naintervale I,
(2) ak f ′(x) < 0 pre každý vnútorný bod intervalu I, tak f je klesajúca naintervale I,
(3) ak f ′(x) = 0 pre každý vnútorný bod intervalu I, tak f je neklesajúcana intervale I,
(4) ak f ′(x) 5 0 pre každý vnútorný bod intervalu I, tak f je nerastúcana intervale I.
Definícia 1.4.3 Hovoríme, že funkcia f : y = f(x) má vo vnútornom bodex0 ∈ I, kde I ⊆ D(f), lokálne maximum, ak existuje prstencové okolie bodux0 také, že pre všetky body z tohoto okolia platí: f(x) 5 f(x0).
Hovoríme, že funkcia f : y = f(x) má vo vnútornom bode x0 ∈ I, kdeI ⊆ D(f), lokálne minimum, ak existuje prstencové okolie bodu x0 také, žepre všetky body z tohoto okolia platí: f(x) = f(x0).
Hovoríme, že funkcia f : y = f(x) má vo vnútornom bode x0 ∈ I, kdeI ⊆ D(f), ostré lokálne maximum, ak existuje prstencové okolie bodu x0také, že pre všetky body z tohoto okolia platí: f(x) < f(x0).
Hovoríme, že funkcia f : y = f(x) má vo vnútornom bode x0 ∈ I, kdeI ⊆ D(f), ostré lokálne minimum, ak existuje prstencové okolie bodu x0také, že pre všetky body z tohoto okolia platí: f(x) > f(x0).
Hovoríme, že bod x0 je stacionárny bod funkcie f : y = f(x), ak existujef ′(x0) a platí: f ′(x0) = 0.
Veta 1.4.14 Nech existuje f ′(x0). Ak funkcia f má v bode x0 lokálny ex-trém, tak f ′(x0) = 0. 3
Definícia 1.4.4 Funkcia f : y = f(x) sa nazýva konvexná na intervale I ⊆D(f), ak pre každú trojicu bodov x1, x2, x3 ∈ I takú, že x1 < x2 < x3, jebod [x2, f(x2)] pod priamkou, ktorá je určená bodmi [x1, f(x1)] a [x3, f(x3)],alebo leží na tejto priamke.
Funkcia f : y = f(x) sa nazýva konkávna na intervale I ⊆ D(f), ak prekaždú trojicu bodov x1, x2, x3 ∈ I takú, že x1 < x2 < x3, je bod [x2, f(x2)]
3Podmienka f ′(x0) = 0 je len nutnou podmienkou pre existenciu lokálneho extrému.Z tejto podmienky nevyplýva automaticky, že funkcia f má v bode x0 lokálny extrém.Funkcia f môže mať lokálny extrém aj v bodoch, ktoré nie sú stacionárnymi bodmi
funkcie f t. j. aj v bodoch, v ktorých funkcia f nemá deriváciu.

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 36
nad priamkou, ktorá je určená bodmi [x1, f(x1)] a [x3, f(x3)], alebo leží natejto priamke.
Funkcia f : y = f(x) sa nazýva rýdzo konvexná na intervale I ⊆ D(f),ak pre každú trojicu bodov x1, x2, x3 ∈ I takú, že x1 < x2 < x3, je bod[x2, f(x2)] pod priamkou, ktorá je určená bodmi [x1, f(x1)] a [x3, f(x3)].
Funkcia f : y = f(x) sa nazýva rýdzo konkávna na intervale I ⊆ D(f),ak pre každú trojicu bodov x1, x2, x3 ∈ I takú, že x1 < x2 < x3, je bod[x2, f(x2)] nad priamkou, ktorá je určená bodmi [x1, f(x1)] a [x3, f(x3)].
Veta 1.4.15 Nech funkcia f : y = f(x) má deriváciu f ′ vo všetkých vnútor-ných bodoch intervalu I ⊆ D(f). Ak pre každú dvojicu bodov x0, x1 ∈ Itakú, že x0 6= x1, je bod [x1, f(x1)] nad dotyčnicou ku grafu funkcie f v bodeT = [x0, f(x0)], tak funkcia f je rýdzo konvexná.
Veta 1.4.16 Nech funkcia f : y = f(x) má deriváciu f ′ vo všetkých vnútor-ných bodoch intervalu I ⊆ D(f). Ak pre každú dvojicu bodov x0, x1 ∈ Itakú, že x0 6= x1, je bod [x1, f(x1)] pod dotyčnicou ku grafu funkcie f v bodeT = [x0, f(x0)], tak funkcia f je rýdzo konkávna.
Veta 1.4.17 Nech funkcia f : y = f(x) je spojitá na intervale I a má druhúderiváciu vo všetkých vnútorných bodoch intervalu I. Potom platí:
(1) ak f ′′(x) > 0 pre každý vnútorný bod intervalu I, tak funkcia f je naintervale I rýdzo konvexná,
(2) ak f ′′(x) < 0 pre každý vnútorný bod intervalu I, tak funkcia f je naintervale I rýdzo konkávna,
(3) ak f ′′(x) = 0 pre každý vnútorný bod intervalu I, tak funkcia f je naintervale I konvexná,
(4) ak f ′′(x) 5 0 pre každý vnútorný bod intervalu I, tak funkcia f je naintervale I konkávna.
Definícia 1.4.5 Nech funkcia f : y = f(x) je spojitá na intervale I ⊆ D(f).Bod x0 ∈ I nazývame inflexným bodom funkcie f , ak funkcia f je v nejakomľavom okolí bodu x0 rýdzo konkávna (rýdzo konvexná) a v nejakom pravomokolí bodu x0 je rýdzo konvexná (rýdzo konkávna).

37 1.4 Derivácia funkcie
Veta 1.4.18 Nech existuje f ′′(x0). Ako bod x0 je inflexným bodom funkcief , tak platí f ′′(x0) = 0. 4
Veta 1.4.19 Nech f ′′(x0) = 0 a f ′′′(x0) 6= 0, potom funkcia f má v bode x0inflexný bod.
Veta 1.4.20 Nech funkcia f : y = f(x) má vo vnútornom bode x0 intervaluI ⊆ D(f) nenulovú n-tú deriváciu f (n)(x0) 6= 0, pre n = 2. Nech f ′(x0) =f ′′(x0) = · · · = f (n−2)(x0) = f (n−1)(x0) = 0. Potom platí:
(1) Ak n je párne číslo a f (n)(x0) > 0, tak funkcia f má v bode x0 ostrélokálne minimum.
(2) Ak n je párne číslo a f (n)(x0) < 0, tak funkcia f má v bode x0 ostrélokálne maximum.
(3) Ak n je nepárne číslo, tak funkcia f má v bode x0 inflexný bod.
4Podmienka f ′′(x0) = 0 je nutná podmienka pre existenciu inflexného bodu, pretoz tejto podmienky automaticky nevyplýva, že bod x0 je inflexným bodom funkcie f .

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 38
1.5 Riešené príkladyPríklad 1.5.1 Určte definičný obor funkcie:
f : y = x+ 3x2 − 9 + ln (x+ 4)−
√16− x2, x ∈ R.
Riešenie:Pre túto funkciu máme tri podmienky. V prvom sčítanci nesmie byť meno-vateľ rovný nule. V druhom sčítanci musí byť argument logaritmickej funkciekladný a v treťom sčítanci musí byť výraz pod odmocninou nezáporný. For-málne to zapíšeme takto: x2 − 9 6= 0 ∧ x + 4 > 0 ∧ 16 − x2 = 0. Vyriešimetieto nerovnosti a dostávame nasledujúce množiny: x ∈ R − −3, 3 ∧ x ∈(−4,∞) ∧ x ∈ 〈−4, 4〉. Prienik týchto množín je výsledný definičný oborD(f) = (−4,−3) ∪ (−3, 3) ∪ (3, 4〉.
√
Príklad 1.5.2 Určte definičný obor funkcie:
f : y = x+ 3(x2 − 9) ·
√16− x2
+ arcsin(x+ 2
6
), x ∈ R.
Riešenie:Napíšeme jednotlivé podmienky, ktoré musia byť splnené, aby funkcia f boladefinovaná. x2 − 9 6= 0 ∧ −1 5 x+2
6 5 1 ∧ 16 − x2 = 0 ∧ 16 − x2 6= 0. Tietopodmienky prepíšeme do nasledujúceho tvaru: x2 − 9 6= 0 ∧ −6 5 x + 2 ∧x+ 2 5 6 ∧ 16−x2 > 0. Vyriešime tieto nerovnosti a dostávame nasledujúcemnožiny: x ∈ R−−3, 3∧x ∈ 〈−8,∞)∧x ∈ (−∞, 4〉∧x ∈ (−4, 4). Prieniktýchto množín je výsledný definičný obor D(f) = (−4,−3)∪ (−3, 3)∪ (3, 4).√
Príklad 1.5.3 Vypočítajte deriváciu k daným funkciám:
f1 : y = x3 − 2x2 + x
5 + e3 − 1x4 + 2
5x
f2 : y =√x+ 5√x− 4√
x+ x2
3√x− 1
ex
f3 : y = x2 · (3− 2 · ln x) + 2− 3xx− 1
f4 : y = ln(e− e2x)
f5 : y = arccos(√
1− x2)

39 1.5 Riešené príklady
Riešenie:Postupne vypočítame derivácie jednotlivých funkcií.
f ′1 : y′ =(x3 − 2x2 + x
5 + e3 − 1x4 + 2
5x
)′=
= (x3)′ − 2(x2)′ + 15 · x
′ + e3 · (1)′ − (x−4)′ + 25 · (x
−1)′ =
= 3x2 − 4x+ 15 + e3 · 0− (−4)x−5 + 2
5 · (−1)x−2 =
= 3x2 − 4x+ 15 + 4
x5 −2
5x2
f ′2 : y′ =(√x+ 5√x− 4√
x+ x2
3√x− 1
ex
)′=
=(√
x)′
+(
5√x)′−(
4√x
)′+(x2
3√x
)′−( 1
ex)′
=
=(x
12)′
+(x
15)′−(4x− 1
2)′
+(x2 · x−
13)′−(e−x
)′=
= 12x
12−1 + 1
5x15−1 − 4
(−1
2
)x−
12−1 +
(x
53)′− e−x (−x)′ =
= 12x− 1
2 + 15x− 4
5 + 2x− 32 + 5
3x23 − e−x(−1) =
= 12√x
+ 15 5√x4
+ 2x√x
+ 53
3√x2 + 1
ex
f ′3 : y′ =(x2 · (3− 2 · ln x) + 2− 3x
x− 1
)′=
=(x2 · (3− 2 · ln x)
)′+(2− 3xx− 1
)′=
= (x2)′ ·(3−2 · ln x)+x2 ·(3−2 · ln x)′+ (2− 3x)′(x− 1)− (2− 3x)(x− 1)′(x− 1)2 =

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 40
= 2x · (3− 2 · ln x) + x2 ·(
0− 2 · 1x
)+ (−3)(x− 1)− (2− 3x)(1)
(x− 1)2 =
= 4x− 4x · ln x+ 1(x− 1)2
f ′4 : y′ =(ln(e− e2x)
)′= 1
(e− e2x) · (e− e2x)′ = 1(e− e2x) · (0− e2x(2x)′) =
= −2e2x
(e− e2x)
f ′5 : y′ =[arccos
(√1− x2
)]′= −1√
1−(√
1− x2)2·(√
1− x2)′
=
= −1√1− (1− x2)
·((1− x2) 1
2)′
= −1√x2· 1
2 · (1− x2) 1
2−1(1− x2)′ =
= −12|x| ·
1√1− x2
(0− 2x) = ±1√1− x2
√
Príklad 1.5.4 Zderivujte funkciu f :
f : y = xlnx.
Riešenie:Použijeme vzťah (9) zo strany 33.
f ′ : y′ =(xlnx
)′=(xlnx
)·[(ln x)′ · ln x+ ln x
x(x)′
]=
=(xlnx
)·[
1x· ln x+ ln x
x· 1]
=(xlnx
)·[
2 ln xx
]√

41 1.6 Neriešené úlohy
1.6 Neriešené úlohy1.1 Určte definičný obor daných funkcií:
a) f : y = 3− x4x2 − 1
b) f : y = (5x+ 1) · sin x2x3 + 3x
c) f : y =√x+ x2 −
√4− x2 + ex − 2x
1−√
1− x2
d) f : y = ln(x− 11 + x
)
e) f : y = x2 − 5x+ 6√1 + ln x− 1
f) f : y = ln( 5x
8x2 + 1
)− ln (1− x)
g) f : y =√
1− 1x−√
1x
+ 1− arccos 10x16 + x2
h) f : y = ln(1− x) · ln(x+ 1)3x2 + 2
i) f : y = ln [ln(ln x)]3e3x + 2e2x + ex + 1
j) f : y = ex · arccos(1 + x)x+√
3 + 2x
k) f : y = ln (3x− 6) ·√
4x− x2
l) f : y =
√(ln x) · arccos (6x− 5)
1 + x2
m) f : y =√
x2 − 12 + 3x+ x2

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 42
n) f : y =
√log 1
3(x2 − 2x+ 1)8 + x3
1.2 Vypočítajte prvú deriváciu daných funkcií:
a) f : y = 3x5 − x4
2 + 7x− 6 + 2x3 · ln 2− cos 1
b) f : y = 52x3 −
√3x
+ 13√
8x− 4√x
c) f : y =(1−√x)· (1 + x)
d) f : y = 1− x2√x
e) f : y = x5
5 ·(
ln x− 15
)− (x− 2)2
x
f) f : y = ex ·(x3 − 3x2 + 6x− 6
)g) f : y = x− cosx · sin x
2
h) f : y = x
2 −1 + x2
2 · arctg x
i) f : y = ex + 1ex − 1
j) f : y = ex · x3 · cosx
k) f : y = ln(2 + x
2− x
)l) f : y = (2x3 − 4)5
m) f : y = arctg x− 1x+ 1 − arctg 1
x
n) f : y = − 1√2· arcsin
√2 · x
1 + x2

43 1.6 Neriešené úlohy
1.3 Vypočítajte druhú deriváciu daných funkcií:
a) f : y = 4x3 − x4
b) f : y = x2 − 2 ln (x− 1)2
c) f : y = 2x+ ln(cosx)
d) f : y = x2
x− 1
e) f : y = 7 + x2
3 + x2
f) f : y = x2 + 11− x2
g) f : y = x2 · e−x
h) f : y = x+ arctg x
1.4 Napíšte rovnicu dotyčnice t k danej funkcii f v danom bode T = [x0, y0]:
a) f : y = x2
x− 1 , ak x0 = 3
b) f : y = arctg x, ak x0 = −1
c) f : y = ln xx
, ak x0 = e
d) f : y = 2x+ 1x2 , ak x0 = −2
e) f : y =√
1− x2, ak x0 = −√
22

1 REÁLNA FUNKCIA JEDNEJ REÁLNEJ PREMENNEJ 44
1.7 Výsledky neriešených úloh1.1 a) D(f) = (−∞,−2)∪ (−2, 2)∪ (2,∞) b) D(f) = R−0 c) D(f) =
(−2,−1〉 ∪ (0, 2〉 d) D(f) = (−∞,−1) ∪ (1,∞) e) D(f) = 〈1e , 1) ∪ (1,∞) f)
D(f) = (0, 1) g) D(f) = (−∞,−8〉 ∪ 〈−2,−1〉 ∪ 〈1, 2〉 ∪ 〈8,∞) h) D(f) =(−1, 1) i) D(f) = (e,∞) j) D(f) = 〈−3
2 ,−1) ∪ (−1, 0) k) D(f) = (2, 4〉 l)D(f) = 〈−1
2 , 0〉 m) D(f) = (−∞,−2) ∪ (1,∞) n) D(f) = 〈0, 1) ∪ (1, 2〉
1.2 a) y′ = 15x4 − 2x3 + 6x2 · ln 2 + 7 b) y′ = − 152x4 +
√3
x2 − 16x 3√x −
2√x
c) y′ = 1 − 32√x − 1
2√xd) y′ = − 1
2x√x− 3
2√x e) y′ = x4 · ln x − 1 + 4
x2
f) y′ = x3 · ex g) y′ = sin2 x h) y′ = −x · arctg x i) y′ = −2ex(ex−1)2 j) y′ =
x2 · ex · (x · cosx+ 3 cosx− x sin x) k) y′ = 44−x2 l) y′ = 30x2(2x3 − 4)4 m)
y′ = 21+x2 n) y′ = x4−1√
x4+1
1.3 a) y′′ = 12x · (2− x) b) y′′ = (x−1)2−1(x−1)2 c) y′′ = −1
(cosx)2 d) y′′ = 2(x−1)3 e)
y′′ = 24 · x2−1(3+x2)3 f) y′′ = 4 · 3x2+1
(1−x2)3 g) y′′ = (2− 4x+ x2) · e−x h) y′′ = −2x(x2+1)2
1.4 a) T = [3, 92 ], t : 3x−4y+ 9 = 0 b) T = [−1, π4 ], t : 2x−2y+ 2−π = 0
c) T = [e, 1e ], t : e · y − 1 = 0 d) T = [−2,−3
4 ], t : x + 4y + 5 = 0 e)T = [−
√2
2 ,√
22 ], t : x− y +
√2 = 0

45
2 Riešenie algebraických rovníc s jednou re-álnou neznámou
V tejto kapitole ukážeme niektoré základné numerické metódy na riešenierovnice f(x) = 0 s jednou reálnou neznámou. Ukážeme, či dané metódykonvergujú k riešeniu vždy, alebo len za určitých podmienok. Naznačíme ajrýchlosť konvergencie jednotlivých metód.
2.1 Separácia koreňovNech je daná nelineárna rovnica f(x) = 0. Snažíme sa nájsť také body c ∈ R,pre ktoré platí f(c) = 0. Tieto body c nazývame korene rovnice f(x) = 0. Pririešení tejto rovnice f(x) = 0 sa snažíme určiť koľko koreňov má táto rovnicaa hľadáme intervaly, v ktorých sa nachádza práve jeden koreň rovnice. Proceshľadania týchto intervalov sa nazýva separácia koreňov rovnice f(x) = 0.Hovoríme, že rovnica f(x) = 0 má odseparované korene, ak platí:
(1) D(f) = 〈a1, b1〉 ∪ 〈a2, b2〉 ∪ · · · ∪ 〈an−1, bn−1〉 ∪ 〈an, bn), 5
(2) (ai, bi) ∩ (aj, bj) = ∅, pre i, j ∈ 1, 2, . . . , n, i 6= j(3) Každý interval 〈ai, bi〉, i ∈ 1, 2, . . . , n obsahuje najviac jeden koreň
rovnice f(x) = 0.Potom takto odseparované korene budeme hľadať niektorou z nižšie po-
písaných približných metód. Pre hľadanie koreňov rovnice je užitočná nasle-dujúca veta.
Veta 2.1.1 Nech je daná funkcia f : y = f(x) a nech 〈a, b〉 ⊆ D(f). Ak jefunkcia f spojitá na intervale 〈a, b〉 a platí:
f(a) · f(b) < 0, (10)
potom v intervale 〈a, b〉 leží aspoň jeden koreň rovnice f(x) = 0.Podmienka (10) vo vete 2.3.1 znamená, že znamienka funkčných hodnôt
v bodoch a a b sú opačné. V danom intervale 〈a, b〉 môže byť aj viac akojeden koreň. Ale ak podmienka (10) vo vete 2.3.1 nie je splnená, tak aj takmôže interval 〈a, b〉 obsahovať korene rovnice f(x) = 06.
5Predpokladáme, že bi = ai+1 pre i ∈ 1, 2, . . . , n− 1.6Napríklad rovnica x2 = 0 má koreň c = 0, ale na žiadnom intervale 〈a, b〉 nemôže byť
splnená podmienka (10).

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 46
Aby sme mohli odseparovať korene rovnice, je vhodné preskúmať vlast-nosti a priebeh funkcie f a na základe týchto vlastností určiť intervaly se-parácie. Pre jednoduchšie nájdenie koreňov s tým, že využijeme základnévlastnosti elementárnych funkcií, je vhodné upraviť rovnicu f(x) = 0 na tvarg(x) = h(x), ak grafy funkcií g a h vieme ľahko nakresliť. Potom oba grafyfunkcií g a h nakreslíme do toho istého súradnicového systému. Hľadané ko-rene funkcie f sa nachádzajú v bodoch, v ktorých sa grafy funkcií g a hpretínajú.
2.2 Metóda bisekcieMetóda bisekcie (resp. metóda polenia intervalu) je najjednoduchšou nume-rickou metódou na riešenie nelineárnych rovníc. V tejto kapitole popíšemealgoritmus, ako hľadať približné riešenie nelineárnej rovnice pomocou me-tódy bisekcie.
Nech je daná spojitá funkcia f : y = f(x) na intervale 〈a, b〉, ktorý je záro-veň intervalom separácie koreňov rovnice f(x) = 0 a nachádza sa v ňom právejeden koreň c. Našou úlohou je nájsť koreň c alebo nájsť takú aproximáciuck, ktorá bude dostatočne blízko ku koreňu c.
Predpokladáme, že na intervale 〈a, b〉 platí: f(a) · f(b) < 0. Tento po-čiatočný interval označíme ako interval 〈a0, b0〉. Tento interval 〈a0, b0〉 roz-delíme na polovicu. Jeho stred označíme ako c0. Pre stred intervalu 〈a0, b0〉platí: c0 = a0+b0
2 . Vznikli nám dva intervaly 〈a0, c0〉 a 〈c0, b0〉. Z týchto dvochintervalov vyberieme ten, v ktorom sa nachádza koreň c. To zistíme pomo-cou podmienky pre krajné body oboch intervalov. Ak f(a0) · f(c0) < 0, taktento interval označíme ako 〈a1, b1〉, t. j. c0 = b1. Ak f(a0) · f(c0) > 0 af(c0) · f(b0) < 0, tak interval 〈c0, b0〉 označíme ako 〈a1, b1〉, kde c0 = a1.Ak f(a0) · f(c0) = 0 resp. f(c0) · f(b0) = 0, tak vieme, že f(c0) = 0. Na-šli sme koreň c = c0 a ukončíme iteračný proces. Ak sme koreň c nenašli,tak nový interval 〈a1, b1〉 polovičnej dĺžky opäť rozdelíme na polovicu a po-stupujeme rovnakým spôsobom v označovaní nových prvkov a ďalšom roz-hodovaní. Takto postupne vytvoríme postupnosť intervalov 〈a0, b0〉, 〈a1, b1〉,〈a2, b2〉, . . . , 〈ak, bk〉, . . . . Každý ďalší interval získame tak, že interval 〈ak, bk〉rozdelíme na polovicu a získame stred ck = ak+bk
2 , pre nejaké k ∈ N. Akf(ak) · f(ck) < 0, tak tento interval označíme ako 〈ak+1, bk+1〉, t. j. ck = bk+1.Ak f(ak) · f(ck) > 0 a f(ck) · f(bk) < 0, tak interval 〈ck, bk〉 označíme ako〈ak+1, bk+1〉, kde ck = ak+1. Ak f(ak) · f(ck) = 0 resp. f(ck) · f(bk) = 0, takvieme, že f(ck) = 0. Našli sme koreň c = ck a ukončíme iteračný proces. Ak

47 2.2 Metóda bisekcie
sme koreň c nenašli, tak nový interval polovičnej dĺžky 〈ak+1, bk+1〉 vytvá-rame až kým jeho dĺžka je menšia ako číslo 2 · ε, pre vopred dané malé reálnečíslo ε > 0, resp.7
bk − ak < 2 · ε. (11)
Približné riešenie rovnice f(x) = 0 zodpovedá hodnote stredu poslednéhok-teho intervalu:
ck = ak + bk2 . (12)
Odhadneme chybu pre takto získané riešenie našej rovnice. Vieme, že koreňc rovnice f(x) = 0 sa nachádza vo vnútri intervalu 〈ak, bk〉. Preto približnáhodnota ck sa môže od presnej hodnoty c nachádzať nanajvýš polovicu dĺžkyintervalu 〈ak, bk〉, t. j. o hodnotu ε. Preto pre odhad chyby metódy bisekcieplatí, že po k-tej iterácii má tvar:
|ck − c| <b− a2k+1 5 ε. (13)
Metóda bisekcie konverguje ku koreňu rovnice vždy, ak interval 〈a, b〉 ob-sahuje koreň c. Ak by sa v intervale nachádzalo viacero koreňov, tak tátometóda nájde jeden z nich. Nevýhodou metódy bisekcie je, že konverguje kukoreňu relatívne pomaly. Preto je vhodné túto metódu využiť na zmenše-nie pôvodného intervalu, kde sa nachádza koreň c, a potom použiť niektorúrýchlejšiu metódu.
Pre prehľadnosť pri riešení rovnice metódou bisekcie môžme použiť na-sledujúcu tabuľku, v ktorej sú zapísané 4 iteračné kroky metódy bisekcie.
Tabuľku 1 na strane 48 vypĺňame až kým v poslednom stĺpci nebudehodnota menšia ako 2 · ε. Hľadanie približného riešenia metódou bisekcies danou presnosťou vôbec nezávisí od tvaru funkcie f . Dá sa ukázať, žezlepšenie výsledku o jedno desatinné miesto si vynúti vždy ďalšie 3 až 4kroky tejto metódy.
7Ak reálny koreň c leží vo vnútri intervalu 〈a, b〉 a c1 = a+b2 , tak |c− c1| < b−a
2 t. j. c1je približná hodnota koreňa c s presnosťou b−a
2 .Ak pre nejaký bod x platí f(x− ε) · f(x + ε) < 0, tak |x− c| < ε.

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 48
Tabuľka 1: Tabuľka pre metódu bisekciek ak bk ck |bk − ak|0 a0 = a b0 = b c0 = a0+b0
2 b0 − a0 f(c0) má rovnaké znamienko ako f(b0)
1 a1 = a0 b1 = c0 c1 = a1+b12 b1 − a1 f(c1) má rovnaké znamienko ako f(a1)
2 a2 = c1 b2 = b1 c2 = a2+b22 b2 − a2 f(c2) má rovnaké znamienko ako f(a2)
3 a3 = c2 b3 = b2 c3 = a3+b32 b3 − a3 f(c3) má rovnaké znamienko ako f(b3)
4 a4 = a3 b4 = c3 c4 = a4+b42 b4 − a4
5 ... ... ... ...
2.3 Metóda prostej iterácieMetóda prostej iterácie na riešenie jednej nelineárnej rovnice s jednou reálnouneznámou je aplikáciou všeobecnej metódy postupných aproximácií, ktorúteraz popíšeme.
Definícia 2.3.1 Hovoríme, že g je zobrazenie množiny A do množiny B(píšeme g: A −→ B), ak každému prvku x ∈ A priradíme pomocou g právejeden prvok y ∈ B taký, že platí: y = g(x).
Nás budú zaujímať zobrazenia množín do seba a prvky, ktoré sa zobraziasamé na seba.
Definícia 2.3.2 Prvok x ∈ A sa nazýva pevný bod zobrazenia g: A −→ A,ak platí:
g(x) = x. (14)
Ak množina A = R, tak zobrazenie g: R −→ R je reálna funkcia jednejreálnej premennej. Napríklad kvadratická funkcia f : y = x2 má dva pevnébody. Sú to body, v ktorých sa graf funkcie f pretne s priamkou y = x. Toplatí pre body x = 0 a x = 1, lebo 02 = 0 a 12 = 1.
Pýtame sa, či každé zobrazenie má pevný bod a ak pevný bod má, ako honájsť. Dá sa dokázať, že niektoré zobrazenia majú pevný bod vždy a existujepostup, ktorý nám nájde tento pevný bod.
Definícia 2.3.3 Nech A ⊂ R je metrický priestor. Hovoríme, že zobrazenieg: A −→ A je kontraktívne (kontrakcia), ak existuje reálne číslo α ∈ 〈0, 1)také, že pre každé dva body x, y ∈ A platí:
d(g(x), g(y)) 5 α · d(x, y). (15)

49 2.3 Metóda prostej iterácie
Číslo α nazývame koeficient kontrakcie.Kontrakcia resp. zúženie sa môže voľne interpretovať tak, že kontraktívne
zobrazenie má obrazy (funkčné hodnoty) bližšie, ako boli ich vzory.
Veta 2.3.1 Nech A je úplný metrický priestor a nech g: A −→ A je kontrak-tívne zobrazenie. Potom existuje práve jeden pevný bod tohoto zobrazenia g(označme ho xp), pre ktorý platí:
xp = limn→∞
xn, (16)
kde xn∞n=0 je postupnosť aproximácií, ktorá je definovaná takto: x0 je ľu-bovoľný prvok z množiny A a ostatné členy postupnosti sú definované pred-pisom:
xk+1 = g(xk), k = 0, 1, 2, . . . (17)
a navyše pre všetky prirodzené čísla n platí:
d(xp, xn) 5 α
1− α · d(xn, xn−1), (18)
d(xp, xn) 5 αn
1− α · d(x0, x1), (19)
kde α je koeficient kontrakcie zobrazenia g.Veta 2.3.1 nám dáva návod, ako približne nájsť pevný bod daného zo-
brazenia g. Zvolíme si ľubovoľný bod x0 ∈ A. Bod x0 nazývame počiatočnáaproximácia. Potom vypočítame ďalšie členy postupnosti podľa vzťahu (17)vo vete 2.3.1. Tento výpočet nazývame iteračný proces a k-ty člen postup-nosti xn∞n=0 sa nazýva k-ta aproximácia.
Podľa vzťahu (16) vo vete 2.3.1 je pevný bod zobrazenia g limitou postup-nosti xn∞n=0. Postupné aproximácie sa približujú k pevnému bodu xp. Ak bysme mohli vykonávať iteračný proces donekonečna, tak by sme týmto postu-pom získali presnú hodnotu pevného bodu xp. To v reálnych podmienkach nieje možné, preto po určitom počte krokov zastavíme iteračný proces a pevnýbod aproximujeme posledným vypočítaným členom postupnosti xn∞n=0.
Kedy zastaviť iteračný proces závisí od toho, s akou presnosťou chcememať pevný bod xp vypočítaný. Na to môžme použiť vzťah (18) resp. vzťah(19) vo vete 2.3.1, ktorý ohraničuje vzdialenosť n-tej aproximácie od pevnéhobodu xp.

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 50
Vráťme sa k riešeniu rovnice f(x) = 0 s tým, že využijeme vyššie uvedenéfakty. Rovnicu f(x) = 0 upravíme na tvar:
x = g(x). (20)
Funkcia g sa nazýva iteračná funkcia. Po tejto úprave bude hľadanie koreňac rovnice f(x) = 0 to isté, ako hľadanie pevného bodu xp funkcie g(x).Zvolíme si počiatočnú aproximáciu c0 ∈ D(g). Ďalšie aproximácie pevnéhobodu (resp. riešenia rovnice) budeme počítať podľa vzťahu:
ck+1 = g(ck). (21)
Takto vytvoríme postupnosť aproximácií cn∞n=0, ktorá vo všeobecnosti ne-musí konvergovať. Preto si ukážeme, kedy metóda prostej iterácie konvergujek riešeniu.
Veta 2.3.2 Nech funkcia g zobrazuje interval 〈a, b〉 do seba a má na tomtointervale prvú deriváciu. Potom ak existuje reálne číslo α ∈ 〈0, 1) také, že
|g′(x)| 5 α ∀x ∈ 〈a, b〉, (22)
tak zobrazenie g(x) je kontraktívne s koeficientom α a v intervale 〈a, b〉 exis-tuje pevný bod xp funkcie g a postupnosť aproximácií získaná predpisom(21) na strane 50, ktorá k tomuto pevnému bodu konverguje pre ľubovoľnúpočiatočnú aproximáciu x0 ∈ 〈a, b〉. Pre odhad chyby platí:
|ck − xp| 5α
1− α · |ck − ck−1|, (23)
|ck − xp| 5αk
1− α · |c0 − c1|, (24)
Odhad (23) resp. (25) vo vete 2.3.2 môžme použiť pri rozhodovaní o ukon-čení iteračného procesu. Avšak overenie podmienky (22) vo vete 2.3.2 môžebyť vo všeobecnosti zložité, tak ako zastavovacie kritérium sa často použijepodmienka:
|ck − ck−1| < ε, (25)čo však neznamená, že platí: |ck − xp| < ε. Preto sa často používa kritérium:
f(ck − ε) · f(ck + ε) < 0. (26)

51 2.4 Newtonova metóda
2.4 Newtonova metódaNewtonova metóda (tiež jej vravíme dotyčnicová metóda) je metóda, ktoráaproximuje riešenie rovnice f(x) = 0 pomocou dotyčníc ku grafu funkcie f .
Základný princíp Newtonovej metódy je konštrukcia dotyčníc k zvolenýmresp. vypočítaným bodom. Zvolíme si počiatočnú aproximáciu x0 riešenia crovnice f(x) = 0. Vypočítame funkčnú hodnotu f(x0). Skonštruujeme dotyč-nicu t0 ku grafu funkcie f v bode [x0, f(x0)]. Priesečník dotyčnice t0 s osou xoznačíme ako bod x1. Bod x1 je ďalšia aproximácia riešenia rovnice f(x) = 0.Opäť vypočítame funkčnú hodnotu f(x1) a skonštruujeme dotyčnicu t1 kugrafu funkcie f v bode [x1, f(x1)]. A týmto spôsobom pokračujeme vo vy-tváraní postupnosti aproximácií x0, x1, x2, . . . . Nech funkcia f má prvú deri-váciu. Potom rovnica dotyčnice tk ku grafu funkcie f v bode T = [xk, yk] márovnicu:
tk : y − yk = f ′(xk) · (x− xk). (27)
Priesečník dotyčnice tk v bode [xk, f(xk)] s osou x vypočítame pomocouvzťahu:
xk+1 = xk −f(xk)f ′(xk)
. (28)
Newtonovu metódu môžme odvodiť pomocou Taylorovho vzorca. Pred-pokladajme, že máme k-tu aproximáciu xk koreňa c. Potom môžeme napísaťnasledujúci vzťah:
f(ξ) = f(xk) + f ′(xk) · (ξ − xk) + ER,
kde ER je zvyšok v Taylorovom vzorci.Ak zanedbáme zvyšok ER a uvedomíme si, že f(ξ) = 0, lebo ξ je koreň
rovnice f(x) = 0, tak z predchádzajúcej rovnice môžme približne vyjadriťkoreň ξ takto:
ξ.= xk −
f(xk)f ′(xk)
,
čo zodpovedá aproximácii xk+1.Z Taylorovho vzorca môžme taktiež odvodiť odhady chyby k-tej aproxi-
mácie koreňa c získanej Newtonovou metódou. Ak má funkcia f na intervaleI druhú deriváciu, pričom xk ∈ I a c ∈ I, potom platia nasledujúce vzťahy:

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 52
|c− xk| <M2
2 ·m1· (xk − xk−1)2, |c− xk| <
M2
2 ·m1· (c− xk−1)2, (29)
kde M2 = maxx∈I |f ′′(x)| a m1 = minx∈I |f ′(x)|.Na základe Lagrangeovej vety 1.4.9 na strane 33 medzi bodmi xk a c
leží taký bod ξ, pre ktorý platí f ′(ξ) = f(xk)−f(c)xk−c
. Keďže pre koreň c platíf(c) = 0, tak máme |xk − c| = |f(xk|
|f ′(ξ)| . Pre každé číslo m, 0 < m 5 |f ′(ξ)|potom platí odhad:
|c− xk| 5|f(xk)|m1
., (30)
Ďalší spôsob ako vyjadriť vzťah pre výpočet k-tej aproximácie je skom-binovať poznatky z teórie pevného bodu a Newtonovej metódy. Vyjadrimex z rovnice f(x) = 0, čo je základný princíp metódy prostej iterácie. Vy-deľme túto rovnicu deriváciou funkcie f , Dostaneme rovnicu v tvare f(x)
f ′(x) .Vynásobíme túto rovnosť číslom −1 a k obom stranám rovnice pripočítamex. Potom dostaneme vzťah:
x = x− f(x)f ′(x) ,
ktorý zodpovedá Newtonovej metóde a je špeciálnym prípadom metódy pros-tej iterácie.
Newtonova metóda je z nami uvažovaných metód na riešenie nelineár-nych rovníc najefektívnejšia, avšak nemusí vždy konvergovať. KonvergenciaNewtonovej metódy často závisí od voľby počiatočnej aproximácie x0. Pretopopíšeme podmienky, ktoré nám zaručia konvergenciu Newtonovej metódy.Veta 2.4.1 (Fourierova podmienka) Nech funkcia f je spojitá na inter-vale 〈a, b〉 a nech v tomto intervale leží práve jeden koreň c rovnice f(x) = 0.Nech prvá aj druhá derivácia funkcie f sú spojité na intervale 〈a, b〉 a nech natomto intervale nemenia znamienko.8 Ak za počiatočnú aproximáciu zvolímebod x0 ∈ 〈a, b〉 tak, že platí:
f(x0) · f ′′(x0) > 0, (31)potom Newtonova metóda bude konvergovať ku koreňu c.
8To, že prvá derivácia funkcie f nemení znamienko na intervale 〈a, b〉, znamená, žefunkcia f je na celom intervale rastúca, alebo je na celom intervale klesajúca. To, že druháderivácia funkcie f nemení znamienko na celom intervale 〈a, b〉, znamená, že funkcia f jena celom intervale konkávna, alebo konvexná.

53 2.5 Riešené príklady
2.5 Riešené príkladyPríklad 2.5.1 Metódou bisekcie riešte danú rovnicu, vykonajte 8 iterácií aodhadnite chybu, ak
x
8 − 2 + ln 3x = 0.
Riešenie:Separáciou koreňov (8 · ln(3x) = 16−x) sa ľahko nájde interval, v ktorom ležíkoreň. Označme si ako funkciu f ľavú stranu rovnice, f : y = x
8 − 2 + ln 3x.Overíme, že koreň c leží v intervale 〈1, 2〉. Funkcia f je na intervale 〈1, 2〉 spo-jitá a platí, že f(1) ·f(2) < 0, teda koreň c ∈ 〈1, 2〉. Vytvoríme tabuľku Tab 2na základe tabuľky Tab 1 zo strany 48, pomocou ktorej nájdeme aproximáciuriešenia c danej rovnice.
Tabuľka 2: Riešenie rovnice metódu bisekciek ak bk ⊕ ck |bk − ak|0 1 2 1,5 11 1,5 2 1,75 0,52 1,75 2 1,875 0,253 1,875 2 1,9375 ⊕ 0,1254 1,875 1,9375 1,90625 0,06255 1,90625 1,9375 1,921875 0,031256 1,921875 1,9375 1,9296875 0,0156257 1,9296875 1,9375 1,93359375 0,00781258 1,93359375 1,9375 1,935546875 ⊕ 0,00390625
Na základe posledného riadku v tabuľke Tab 2 sme dostali približné rie-šenie rovnice c8 = 1,935546875. Odhadneme chybu riešenia:
|c8 − c| 52− 128+1 = 1
29.= 0,001953125.
Znamienko v krúžku v Tab 2 je znamienko funkčnej hodnoty funkcie f vdaných bodoch. Napríklad 1,75 znamená, že f(1,75) < 0.
√
Príklad 2.5.2 Riešte danú rovnicu Newtonovou metódou s presnosťou ε =5 · 10−6, ak
x
8 − 2 + ln 3x = 0.

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 54
Riešenie:Podobne ako v predchádzajúcom príklade ľahko zistíme, že koreň tejto rov-nice c ∈ 〈1, 2〉. Označme ako funkciu f ľavú stranu rovnice, f : y = x
8 − 2 +ln 3x. Na to, aby sme overili podmienky konvergencie Newtonovej metódypotrebujeme poznať prvú a druhú deriváciu funkcie f .
f : y = x
8 − 2 + ln 3x,
f ′ : y′ =(x
8 − 2 + ln 3x)′
= 18 + 1
x,
f ′′ : y′′ =(1
8 + 1x
)′= − 1
x2 ,
Druhá derivácia funkcie f je záporná (a teda f ′′ nemení znamienko) na in-tervale 〈1, 2〉 a platí, že f(1) · f ′′(1) > 0, preto ako počiatočnú aproximáciuzvolíme bod c0 = 1. Napíšeme iteračný vzťah, pomocou ktorého vyplnímetabuľku s aproximáciami riešenia našej rovnice.
ck+1 = ck −f(ck)f ′(ck)
= ck −ck8 − 2 + ln 3ck
18 + 1
ck
.
Vytvoríme tabuľku: Keďže je splnené zastavovacie kritérium (druhý stĺpec v
Tabuľka 3: Riešenie rovnice Newtonovou metóduk ck f(ck − ε) · f(ck + ε)0 1 —1 1,69012241 · = ⊕2 1,92080143 · = ⊕3 1,934036886 · = ⊕4 1,934073692 · ⊕ =
tabuľke Tab 3), tak približným riešením našej rovnice pre zadanú presnosť ječíslo c4 = 1,934073692. Pre toto riešenie musíme ešte odhadnúť chybu. Platí:
m1 = minx∈〈1,2〉
|f ′(x)| = 0,625,
|c− c4| <|f(c4)|m1
= 2,8974 · 10−10 < ε.
√

55 2.5 Riešené príklady
Príklad 2.5.3 Separujte korene rovnice x ·√x+ 1 = 1, overte splnenie pod-
mienok konvergencie iteračnej metódy. Uskutočnite 3 kroky a odhadnite ne-presnosť riešenia po treťom kroku.Riešenie:Pre separáciu koreňov môžme upraviť našu rovnicu na tvar:
√x+ 1 = 1
x
Z grafov elementárnych funkcií, ktoré tvoria pravú a ľavú stranu rovnice ľahkoodhadneme, že koreň c by mohol ležať v intervale 〈1
2 , 1〉. Overíme, že naozajkoreň c patrí do tohto intervalu. Označme si f : y = x ·
√x+ 1− 1. Funkcia
f je spojitá na intervale 〈0, 1〉 a platí, že f(0) · f(1) = (−1) · (√
2 − 1) < 0.Ukázali sme, že naozaj c ∈ 〈0, 1〉. Vyjadrime si teraz funkciu ϕ úpravou našejrovnice na tvar x = ϕ(x).
x = 1√x+ 1
=⇒ ϕ(x) = 1√x+ 1
pre x ∈ 〈12 , 1〉
Vypočítame prvú deriváciu funkcie ϕ:
ϕ′(x) =(
1√x+ 1
)′= −1
2 · (x+ 1)− 32 = −1
2√
(x+ 1)3.
Funkcia |ϕ′(x)| je klesajúca funkcia na intervale 〈0, 1〉, preto ju môžme ohra-ničiť:
|ϕ′(x)| =
∣∣∣∣∣∣ −12√
(x+ 1)3
∣∣∣∣∣∣ 5 310 < 1 pre x ∈ 〈12 , 1〉
Zobrazenie ϕ je kontraktívne na intervale 〈12 , 1〉 a α = 3
10 , takže iteračnámetóda bude konvergovať. Ako počiatočnú aproximáciu zvolíme bod c0 = 0a vyjadríme iteračný vzťah:
ck+1 = 1√ck + 1
Vytvoríme tabuľku, do ktorej zapíšeme výsledky z vyššie uvedeného iterač-ného vzťahu.
Ešte musíme odhadnúť chybu nášho riešenia. Poznáme hodnotu α a po-užijeme vzťah (23), ktorý je uvedený na strane 50.
|ck − c| 5α
1− α · |ck − ck−1|

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 56
Tabuľka 4: Riešenie rovnice iteračnou metóduk ck |ck − ck−1|0 0 —1 1 12 0,7071 0,29293 0,7654 0,0583
|c3 − c| 5α
1− α · |c3 − c2|
|c3 − c| 512
1− 12· 0,0583 = 0,0583.
Dostali sme približné riešenie c3 = 0,7654, pričom odhad nepresnosti pre totoriešenie má hodnotu 0,0583.
√

57 2.6 Neriešené úlohy
2.6 Neriešené úlohy2.1 Separujte reálne korene danej rovnice a vyriešte danú rovnicu metó-dou bisekcie pre určený koreň. Vykonajte n krokov tejto iteračnej metódy aodhadnite chybu výpočtu.
a) x5 = 6x2 − 1, kde n = 10 a zvoľte menší kladný koreň,
b) x5 = 4x4 + 2, kde n = 14 a zvoľte kladný koreň,
c) x4 = 7− 8x, kde n = 15 a zvoľte najväčší koreň,
d) x3 = 2− 4x2, kde n = 10 a zvoľte väčší záporný koreň,
e) ex + 2x = 2, kde n = 12 a zvoľte kladný koreň,
f) x2 + ln x = 4, kde n = 12 a zvoľte kladný koreň,
2.2 Separujte reálne korene danej rovnice a vyriešte danú rovnicu metódouprostej iterácie pre určený koreň s presnosťou ε. Odhadnite chybu výpočtu.
a) x3 − 1 = 12x, kde ε = 10−3 a zvoľte najmenší koreň,
b) x3 − 1 = 12x2, kde ε = 10−2 a zvoľte menší kladný koreň,
c) ln x = 4− 2x, kde ε = 10−3 a zvoľte kladný koreň,
d) e2x − 9 = x, kde ε = 10−4 a zvoľte kladný koreň,
e) 4x3 + 1− x2 = 0, kde ε = 10−3 a zvoľte najmenší záporný koreň.
2.3 Separujte reálne korene danej rovnice a vyriešte danú rovnicu Newto-novou metódou pre určený koreň s presnosťou ε. Odhadnite chybu výpočtu.
a) x3 + x = 3, kde ε = 10−3 a zvoľte kladný koreň,
b) x4 + 3 = 5x3, kde ε = 10−4 a zvoľte najväčší kladný koreň,
c) ln x = x− 2, kde ε = 10−4 a zvoľte najväčší kladný koreň,
d) e2x = 8x, kde ε = 10−4 a zvoľte najmenší kladný koreň,
e) x5 + 4− x2 = 0, kde ε = 10−4 a zvoľte záporný koreň.

2 RIEŠENIE ALGEBRAICKÝCH ROVNÍC S JEDNOU REÁLNOUNEZNÁMOU 58
2.7 Výsledky neriešených úloh2.1 a) 0,4111328125 ∈ 〈0, 1〉 b) 4,0076904296875 ∈ 〈3, 5〉 c) 0,81881713867188 ∈〈0, 1〉 d)−0,7900390625 ∈ 〈−1, 0〉 e) 0,314697265625 ∈ 〈0, 1〉 f) 1,841064453125 ∈〈1, 2〉
2.2 a) −3,505 ∈ 〈−4,−3〉 b) 0,29 ∈ 〈0, 1〉 c) 1,727 ∈ 〈1, 2〉 d) 1,0374 ∈〈0, 2〉 e) −0,24490799644825 ∈ 〈−1, 0〉
2.3 a) 1,213 ∈ 〈1, 2〉 b) 4,9756 ∈ 〈4, 6〉 c) 3,1462 ∈ 〈3, 4〉 d) 0,17870 ∈〈0, 1〉 e) −1,2056 ∈ 〈−2, 0〉

59
3 Aproximácia funkcieČasto sa stáva, že funkcia nie je zadaná žiadnym funkčným predpisom apoznáme len jej funkčné hodnoty v niektorých jej bodoch, ktoré najčastejšiezískavame pri rôznych meraniach. Pri takýchto funkciách je problém získaťfunkčnú hodnotu v inom než zadanom bode, nájsť jej deriváciu, prípadne juintegrovať. Preto je vhodné takúto funkciu nahradiť inou funkciou, ktorá jepodobná, má funkčný predpis a ľahko sa s ňou počíta. Najčastejšie sa priaproximácii využíva polynomická funkcia (polynóm n-tého stupňa), ktorá jedefinovaná na množine R, je ľahko diferencovateľná a integrovateľná na R.Požiadavky na funkciu, ktorou chceme aproximovať zadanú funkciu môžubyť rôzne. Ak použijeme interpoláciu, tak požadujeme, aby aproximujúcafunkcia mala rovnaké funkčné hodnoty vo zvolených bodoch. Pri metódenajmenších štvorcov nie je nevyhnutné, aby aproximujúca funkcia priamoprechádzala danými bodmi, stačí, aby v určitom zmysle, bola k daným bodomčo najbližšie.
3.1 InterpoláciaFormulácia úlohy: Nech je daná funkcia f pomocou n+ 1 navzájom rôznychbodov x0, x1, . . . , xn. Tieto body nazývame uzlové body (uzly interpolácie).Označme funkčné hodnoty v týchto bodoch y0, y1, . . . , yn, kde y0 = f(x0),y1 = f(x1), y2 = f(x2), . . . , yn = f(xn). Nájdime polynóm Pn(x) nanajvýšn-tého stupňa taký, že v uzlových bodoch nadobúda rovnaké funkčné hod-noty, ako daná funkcia f t. j. Pn(xi) = yi pre i = 0, 1, 2, . . . , n. Od polynómuPn(x) sa tiež zvykne požadovať aj zhoda v hodnotách derivácií v uzlových bo-doch. V ďalších úvahách sa budeme zaoberať len najjednoduchším riešením,v ktorom budeme požadovať len zhodu vo funkčných hodnotách.
Veta 3.1.1 Nech sú dané uzlové body [xi, yi] pre i = 0, 1, 2, . . . , n. Po-tom existuje práve jeden polynóm Pn(x) nanajvýš n-tého stupňa taký, žePn(xi) = yi pre i = 0, 1, 2, . . . , n.
Konštrukcia interpolačného polynómu
Nižšie popíšeme konštrukciu polynómu, ktorý spĺňa podmienky vety 3.1.1,a ktorý sa nazýva Lagrangeov interpolačný polynóm.

3 APROXIMÁCIA FUNKCIE 60
Sú dané body [xi, yi] pre i = 0, 1, 2, . . . , n. Pre i = 0, 1, 2, . . . , n zostrojímepolynómy pi(x), pre ktoré platí:
pi(xj) =
1 pre i = j0 pre i 6= j
Potom Lagrangeov interpolačný polynóm má tvar:
Ln(x) = p0(x) · y0 + p1(x) · y1 + · · ·+ pn−1(x) · yn−1 + pn(x) · yn
Ľahko vidieť, že takto definovaná funkcia Ln(x) spĺňa tvrdenie vety 3.1.1.Ostáva už len ukázať samotnú konštrukciu polynómu pi(x).
p0(x) = (x− x1) · (x− x2) · · · · · (x− xn)(x0 − x1) · (x0 − x2) · · · · · (x0 − xn)
p1(x) = (x− x0) · (x− x2) · · · · · (x− xn)(x1 − x0) · (x1 − x2) · · · · · (x1 − xn)
p2(x) = (x− x0) · (x− x1) · · · · · (x− xn)(x2 − x0) · (x2 − x1) · · · · · (x2 − xn)
pn−1(x) = (x− x0) · (x− x1) · · · · · (x− xn−2) · (x− xn)(xn−1 − x0) · (xn−1 − x1) · · · · · (xn−1 − xn−2) · (xn−1 − xn)
pn(x) = (x− x0) · (x− x1) · · · · · (x− xn−2) · (x− xn−1)(xn − x0) · (xn − x1) · · · · · (xn − xn−2) · (xn − xn−1)
Ľahko vidieť, že takéto funkčné predpisy spĺňajú definíciu polynómu pi(x)v uzlových bodoch xj pre i, j = 0, 1, 2, . . . , n. Po dosadení do predpisu Ln(x)dostávame Lagrangeov interpolačný polynóm:
Ln(x) =n∑j=0
n∏i=0i 6=j
(x− xi)(xj − xi)
· yj
Podobným spôsobom môžme definovať aj inverzný Lagrangeov interpo-lačný polynóm. Nech sú dané body [xi, yi] pre i = 0, 1, 2, . . . , n. Zostrojímepolynómy pi(y), pre ktoré platí:
pi(yj) =
1 pre i = j0 pre i 6= j

61 3.2 Metóda najmenších štvorcov
Potom Inverzný Lagrangeov interpolačný polynóm má tvar:
LInvn (y) = p0(y) · x0 + p1(y) · x1 + · · ·+ pn−1(y) · xn−1 + pn(y) · xn
Podobným postupom, ako pri konštrukcii Lagrangeovho interpolačnéhopolynómu dostávame pre uzlové body [xi, yi] pre i = 0, 1, 2, . . . , n predpisLInvn (y) - Inverzný Lagrangeov interpolačný polynóm:
LInvn (y) =
n∑j=0
n∏i=0i 6=j
(y − yi)(yj − yi)
· xj
3.2 Metóda najmenších štvorcovPri experimentálnych meraniach sa často vykonáva meranie viac krát pritých istých podmienkach, čo je v rozpore s predpokladmi interpolácie, kdepožadujeme, aby všetky uzlové body boli navzájom rôzne. Taktiež pri mera-niach získavame údaje zaťažené chybou, preto nie je vhodné, aby aproximu-júca funkcia kopírovala tieto chyby. Preto ak vieme aspoň trošku odhadnúťznámu funkčnú závislosť (lineárna, kvadratická, logaritmická, exponenciálnaapod. ), môžme uvedenú funkciu aproximovať tak, že z predpokladaného typufunkčnej závislosti vyberieme takú funkciu, ktorá je daným bodom v istomzmysle, čo najbližšie.
Formulácia úlohy: Nech sú dané body x0, x1, x2, . . . , xn a k ním odpoveda-júce funkčné hodnoty y0, y1, y2, . . . , yn. Nech sú dané funkcie ϕ0, ϕ1, . . . , ϕm,kde m < n+1. Potom medzi všetkými funkciami tvaru (lineárna kombináciafunkcií ϕ0, ϕ1, ϕ2, . . . , ϕm):
fm(x) = a0 · ϕ0(x) + a1 · ϕ1(x) + · · ·+ am · ϕm(x) =m∑j=0
aj · ϕj(x)
hľadáme takú, pre ktorú bude kvadratická odchýlka:
g(a0, a1, . . . , am) =n∑i=0
(yi − fm(xi))2 . (32)
nadobúdať minimálnu hodnotu. Neznáme premenné a0, a1, . . . , am sú z mno-žiny R. Kvadratická odchýlka g vyjadruje súčet obsahov štvorcov s dĺž-kou strany |yi − fm(xi)|, pre i = 0, 1, 2, . . . , n. Funkcia, pre ktorú sa nado-búda minimum g sa nazýva najlepšou aproximáciou experimentálnych údajovy0, . . . , yn v danej triede funkcií v zmysle metódy najmenších štvorcov.

3 APROXIMÁCIA FUNKCIE 62
Určenie najlepšej aproximácie:
Pretože body [xi, yi], i = 0, 1, 2, . . . , n a funkcie ϕj, j = 0, 1, 2, . . . ,m súdané, kvadratická odchýlka:
g(a0, a1, . . . , am) =n∑i=0
(yi − fm(xi))2 =
=n∑i=0
[yi − (a0 · ϕ0(xi) + a1 · ϕ1(xi) + · · ·+ am · ϕm(xi))]2 .
závisí len od koeficientov a0, a1, . . . , am funkcie g. Z diferenciálneho počtufunkcie viacerých premenných vieme, že nutnou podmienkou pre to, aby funk-cia g(a0, a1, . . . , am) nadobudla minimum, je splnenie podmienok vyjadrenýchnasledujúcimi rovnicami:
∂g
∂aj= ∂
∂aj
[n∑i=0
[yi − (a0 · ϕ0(xi) + a1 · ϕ1(xi) + · · ·+ am · ϕm(xi))]2]
= 0,
pre j = 0, 1, . . . ,m. Po zderivovaní dostávame novú sústavu m rovníc:[n∑i=0
2 · [yi − (a0 · ϕ0(xi) + a1 · ϕ1(xi) + · · ·+ am · ϕm(xi))] · (−ϕj(xi))]
= 0,
pre j = 0, 1, . . . ,m. Všetky rovnice vydelíme číslom −2 a rozdelíme ich najednotlivé sumy. Potom dostaneme takúto sústavu m lineárnych rovníc s mneznámymi:[n∑i=0
(yi · ϕj(xi))−n∑i=0
(a0 · ϕ0(xi) · ϕj(xi))− · · · −n∑i=0
(am · ϕm(xi) · ϕj(xi))]
= 0,
pre j = 0, 1, . . . ,m. Z každej sumy môžeme vybrať pre sumu zodpoveda-júci koeficient ak a po úprave dostávame takzvané normálne rovnice prepremenné a0, a1, . . . , am:
a0 ·n∑i=0
(ϕ0(xi) · ϕj(xi)) + · · ·+ am ·n∑i=0
(ϕm(xi) · ϕj(xi)) =n∑i=0
(yi · ϕj(xi)) ,
(33)pre j = 0, 1, . . . ,m. Takto sme získali sústavu m lineárnych rovníc s m ne-známymi ao, a1, . . . , am, ktorú už vieme ľahko vyriešiť.

63 3.2 Metóda najmenších štvorcov
Ukážeme špeciálny prípad aproximácie metódou najmenších štvorcov po-mocou algebraických polynómov. Zvoľme funkcie ϕi takto: ϕi(x) = xi, prei = 0, 1, 2, . . . ,m, t. j.
ϕ0(x) = 1, ϕ1(x) = x, ϕ2(x) = x2, . . . , ϕm(x) = xm.
Aproximujúcu funkciu fm teraz označme ako polynóm Pm, ktorý má tvar:
Pm(x) = a0 + a1 · x+ a2 · x2 + · · ·+ am · xm. (34)
Po úprave dostávame sumy zo sústavy normálnych rovníc:n∑i=0
(ϕ0(xi) · ϕ0(xi)) =n∑i=0
(ϕ0(xi))2 =n∑i=0
(x0i
)2=
n∑i=0
12 = (n+ 1),
n∑i=0
(ϕ0(xi) · ϕ1(xi)) =n∑i=0
(x0i · x1
i
)=
n∑i=0
xi
n∑i=0
(ϕ0(xi) · ϕ2(xi)) =n∑i=0
(x0i · x2
i
)=
n∑i=0
x2i
...n∑i=0
(ϕr(xi) · ϕs(xi)) =n∑i=0
(xri · xsi ) =n∑i=0
xr+si , r, s ∈ 0, 1, . . . ,m
...Sústava normálnych rovníc má tvar:
a0 · (n+ 1) + a1 ·∑ni=0 xi + . . . + am ·
∑ni=0 x
mi = ∑n
i=0 yi
a0 ·∑ni=0 xi + a1 ·
∑ni=0 x
2i + . . . + am ·
∑ni=0 x
m+1i = ∑n
i=0 xi · yi
a0 ·∑ni=0 x
2i + a1 ·
∑ni=0 x
3i + . . . + am ·
∑ni=0 x
m+2i = ∑n
i=0 x2i · yi
... ... ... ...
a0 ·∑ni=0 x
mi + a1 ·
∑ni=0 x
m+1i + . . . + am ·
∑ni=0 x
2mi = ∑n
i=0 xmi · yi
Pre aproximáciu priamkou P1(x) = a0 +a1 ·x dostávame sústavu normál-nych rovníc v tvare:

3 APROXIMÁCIA FUNKCIE 64
a0 · (n+ 1) + a1 ·∑ni=0 xi = ∑n
i=0 yi
a0 ·∑ni=0 xi + a1 ·
∑ni=0 x
2i = ∑n
i=0 xi · yi
a pre aproximáciu parabolou P2(x) = a0 + a1 · x+ a2 · x2 dostávame sústavunormálnych rovníc v tvare:
a0 · (n+ 1) + a1 ·∑ni=0 xi + a2 ·
∑ni=0 x
2i = ∑n
i=0 yi
a0 ·∑ni=0 xi + a1 ·
∑ni=0 x
2i + a2 ·
∑ni=0 x
3i = ∑n
i=0 xi · yi
a0 ·∑ni=0 x
2i + a1 ·
∑ni=0 x
3i + a2 ·
∑ni=0 x
4i = ∑n
i=0 x2i · yi
Okrem polynómov sa často využívajú aj goniometrické funkcie, ak predpo-kladáme periodické správanie sa aproximovaných údajov. Napríklad funkcieϕi môžme zvoliť takto (ak predpokladáme periódu 2π):
ϕ0(x) = 1, ϕ1(x) = cos x, ϕ2(x) = sin x, ϕ3(x) = cos 2x, ϕ4(x) = sin 2x, . . .

65 3.3 Riešené príklady
3.3 Riešené príkladyPríklad 3.3.1 Napíšte Lagrangeov interpolačný polynóm k funkcii f , ktorá
je daná uzlovými bodmi: xi −1 0 1 2yi 3 2 1 6 .
Riešenie:Zo zadania vidíme, že n = 3. Lagrangeov interpolačný polynóm má tvar:
L3(x) =3∑j=0
3∏i=0i6=j
(x− xi)(xj − xi)
· yj =
= (x− 0) · (x− 1) · (x− 2)((−1)− 0) · ((−1)− 1) · ((−1)− 2) · 3+
+(x− (−1)) · (x− 1) · (x− 2)(0− (−1)) · (0− 1) · (0− 2) · 2+
+(x− (−1)) · (x− 0) · (x− 1)(2− (−1)) · (2− 0) · (2− 1) · 1+
+(x− (−1)) · (x− 0) · (x− 2)(1− (−1)) · (1− 0) · (1− 2) · 6 =
= 3x · (x2 − 3x+ 2)(−1) · (−2) · (−3) + (x2 − 1) · (2x− 4)
1 · (−1) · (−2) +
+x · (x2 − 1)
3 · 2 · 1 + x · (x2 − x− 2)2 · 1 · (−1) = x3 − 2x+ 2
Príklad 3.3.2 Riešte rovnicu f(x) = 0 pomocou Lagrangeovej inverznej in-
terpolácie ak je funkcia f daná uzlovými bodmi: xi 0 1 3 4yi 5 3 −1 −2 .
Riešenie:Riešiť rovnicu f(x) = 0 pomocou inverzného Lagrangeovho interpolačnéhopolynómu znamená určiť hodnotu tohto polynómu v bode nula t. j. LInv
n (0).9Zo zadania vidíme, že n = 3. Inverzný Lagrangeov interpolačný polynóm mátvar:
9Predpokladáme, že f(x) = 0 práve vtedy, ak x = f−1(0) .= LInv.n (0)

3 APROXIMÁCIA FUNKCIE 66
LInv3 (y) =
3∑j=0
3∏i=0i 6=j
(y − yi)(yj − yi)
· xj =
= (y − 3) · (y − (−1)) · (y − (−2))(5− 3) · (5− (−1)) · (5− (−2)) · 0+
+(y − 5) · (y − (−1)) · (y − (−2))(3− 5) · (3− (−1)) · (3− (−2)) · 1+
+ (y − 5) · (y − 3) · (y − (−2))((−1)− 5) · ((−1)− 3) · ((−1)− (−2)) · 3+
+ (y − 5) · (y − 3) · (y − (−1))((−2)− 5) · ((−2)− 3) · ((−2)− (−1)) · 4
V tomto prípade nie je nevyhnutné poznať funkčný predpis tohto poly-nómu, stačí ak vypočítame hodnotu polynómu v bode nula, t. j. spočítame:
LInv3 (0) =
3∑j=0
3∏i=0i 6=j
(0− yi)(yj − yi)
· xj =
= (0− 3) · (0− (−1)) · (0− (−2))(5− 3) · (5− (−1)) · (5− (−2)) · 0+
+(0− 5) · (0− (−1)) · (0− (−2))(3− 5) · (3− (−1)) · (3− (−2)) · 1+
+ (0− 5) · (0− 3) · (0− (−2))((−1)− 5) · ((−1)− 3) · ((−1)− (−2)) · 3+
+ (0− 5) · (0− 3) · (0− (−1))((−2)− 5) · ((−2)− 3) · ((−2)− (−1)) · 4 =
= −684 · 0 + −10
−40 · 1 + 3024 · 3 + 15
−35 · 4 = 14 + 90
24 −6035 = 2,29571.
Dostávame LInv3 (0) = 2,29571, teda L3(2,29571) = 0, preto riešením rov-
nice f(x) = 0 je bod x = 2,29571.Príklad 3.3.3 Pre hodnoty zadané tabuľkoux 0,1 0,5 0,7 1,2y 14,61 3,39 2,14 0,47
určte metódou najmenších štvorcov optimálne koeficienty a a b v závislostiy(x) ∼ a
x+ b · ln(x). Vypíšte teoretickú aj číselnú maticu sústavy. Sústavu
riešte Gaussovou eliminačnou metódou.

67 3.4 Neriešené úlohy
3.4 Neriešené úlohy3.1 Zostrojte Lagrangeov interpolačný polynóm pre funkciu f(x), ktorá jezadaná tabuľkou:
a) x −1 0 1 2y 2 −1 2 4
b) x 0,1 0,5 0,7 1,2y 7,2 3,6 2,4 0,8
c) x −2 0 2 3y 4 −1 −2 1
d) x −2 1 3y 5 −3 5
e) x −1 0 2 3 5y 12 10 0 −4 15
f) x −3 −2 1 3y 12 0 4 −15
3.2 Funkcia f(x) je daná tabuľkou. Metódou najmenších štvorcov aproxi-mujte funkciu f lineárnou funkciou g: y = ax+ b.
a) x −1 2 3 5y 4 4 5 7
b) x −0,1 0,5 0,7 1,2y 7,2 3,6 2,4 0,8
e) x −1 0 2 3 5y 6 2 0 −6 −12
3.3 Funkcia f(x) je daná tabuľkou. Metódou najmenších štvorcov aproxi-mujte funkciu f funkciou g: y = a+ b · ex.x 0 0,5 1,1 2,0y −1,75 0,53 0,95 1,25

3 APROXIMÁCIA FUNKCIE 68
3.5 Výsledky neriešených úloh3.1 a) L3(x) = −7
6x3 + 3x2 + 7
6x−1 b) L3(x) = −1011x
3 + 6811x
2− 1367110 x+ 461
55c) L3(x) = 1
5x3 + 1
2x2 − 23
10x − 1 d) L2(x) = 43x
2 − 43x − 3 e) L4(x) =
112x
4 − 54x
2 − 196 x+ 10 f) L3(x) = −11
12x3 − 1
3x2 + 15
4 x+ 32
3.2 a) g: y = 0, 48x+3, 92 b) g: y = −2.89473684210526x+3.21052631578947c) g: y = −4.99135446685879x+ 6.3700288184438
3.3 g: y = −0, 8085 + 0, 3231 · ex

69
4 Výpočet určitého integrálu
4.1 Primitívna funkciaS pojmom derivácie sme sa stretli v časti 1.4.1. V tejto kapitole sa budemezaoberať opačným procesom, ako bolo derivovanie funkcie. Hľadáme takúfunkciu, ktorej derivácia sa bude rovnať danej funkcii.
Definícia 4.1.1 Nech je daná funkcia f s definičným oborom D(f) ⊆ R.Funkcia F sa nazýva primitívna funkcia k funkcii f na intervale I ⊆ D(f),ak pre všetky x ∈ I platí: F ′(x) = f(x). Predpokladáme, že v krajnýchbodoch intervalu I má funkcia F aspoň jednostranné derivácie.
Dôsledkom definície primitívnej funkcie je fakt, že každá primitívna funk-cia F je spojitá na intervale I, lebo má na intervale I prvú deriváciu.
Veta 4.1.1 Nech funkcia F : y = F (x) je primitívnou funkciou k funkciif : y = f(x) na intervale I ⊆ D(f) ⊆ R a nech c ∈ R je reálna konštanta.Potom aj funkcia G = F + c je primitívna funkcia k funkcii f na intervale I.
Veta 4.1.2 Nech funkcie F a G sú primitívne funkcie k funkcii f na intervaleI ⊆ D(f) ⊆ R. Potom funkcia H = F −G je konštantná na intervale I.
Definícia 4.1.2 Množinu F + c : c ∈ R ∧ F ′ = f nazývame neurčitý in-tegrál a označujeme ju symbolom
∫f(x) dx = F (x)+c. Hľadanie primitívnej
funkcie k danej funkcii f nazývame integrovanie (integrácia funkcie f), argu-ment x nazývame integračná premenná a konštantu c nazývame integračnákonštanta.
Poznámka 4.1.1 Platia vzťahy:∫f ′(x) dx = f(x)+c a (
∫f(x) dx)′ = f(x).
Veta 4.1.3 Nech funkcia f : y = f(x) je spojitá na intervale I ⊆ D(f) ⊆ R,potom k funkcii f na intervale I existuje primitívna funkcia F : y = F (x).
Pravidlá pre integrovanie:
(1)∫
(α · f(x)) dx = α ·∫f(x) dx
(2)∫
(f(x) + g(x)) dx =∫f(x) dx+
∫g(x) dx
(3)∫
(f(x)− g(x)) dx =∫f(x) dx−
∫g(x) dx
(4)∫ f ′(x)
f(x) dx = ln |f(x)|+ c

4 VÝPOČET URČITÉHO INTEGRÁLU 70
Vzorce pre integrovanie:
(1)∫
1 dx = x+ c(2)
∫k dx = k · x+ c pre k ∈ R
(3)∫xn dx = 1
n+1 · xn+1 + c pre n 6= −1
(4)∫ax dx = 1
ln a · ax + c pre a > 0 ∧ a 6= 1
(5)∫
ex dx = ex + c(6)
∫ 1x
dx = ln |x|+ c(7)
∫sin x dx = − cosx+ c
(8)∫
cosx dx = sin x+ c(9)
∫ 1cos2 x
dx = tg x+ c(10)
∫ 1sin2 x
dx = −cotg x+ c(11)
∫ 1√1−x2 dx = arcsin x+ c
(12)∫ 1
1+x2 dx = arctg x+ c
(13)∫ 1
1−x2 dx = 12 · ln
∣∣∣1+x1−x
∣∣∣+ c
(14)∫ 1√
x2+a2 dx = ln∣∣∣x+
√x2 + a2
∣∣∣+ c
(15)∫ 1√
x2−a2 dx = ln∣∣∣x+
√x2 − a2
∣∣∣+ c
Integrovanie metódou per partes:
Ako sme si mohli všimnúť, tak medzi pravidlami pre integrovanie námchýbajú integrály pre integrovanie súčinu dvoch funkcií a podielu dvoch funk-cií. Na rozdiel od derivácie, pri integrovaní neexistuje univerzálne pravidlo preintegrovanie uvedených funkcií. Metóda per partes nám umožňuje integrovaťniektoré súčiny a podiely a aj elementárne funkcie, ktoré sa nenachádzajúmedzi vzorcami na integrovanie.
Veta 4.1.4 Nech funkcie u : y = u(x) a v : y = v(x) majú spojité prvéderivácie na intervale I ⊆ R. Potom platí:∫
u(x) · v′(x) dx = u(x) · v(x)−∫u′(x) · v(x) dx
∫u′(x) · v(x) dx = u(x) · v(x)−
∫u(x) · v′(x) dx

71 4.2 Určitý integrál
Integrovanie substitučnou metódou:
Substitučná metóda nám umožňuje integrovať mnohé zložené funkcie,niektoré súčiny funkcií a často aj podiel dvoch funkcií.
Veta 4.1.5 Nech funkcia g : y = g(x) je definovaná na otvorenom intervaleI = (a; b) ⊆ D(g) ⊆ R s oborom hodnôt IH = (c; d) ⊆ H(g) ⊆ R (t. j.g : (a; b) −→ (c; d)). Nech funkcia g je spojitá a diferencovateľná. Nechfunkcia F : y = F (x) je primitívna funkcia k funkcii f : y = f(x), ktorá jedefinovaná na intervale J = IH = (c; d) ⊆ D(f) ⊆ R. Potom funkcia F (g(x))je primitívna funkcia k funkcii f(g(x)) · g′(x) na intervale I = (a; b).
Vetu 4.1.5 môžme formálne prepísať do tvaru:
∫f(g(x)) · g′(x) dx
∣∣∣∣∣ g(x) = tg′(x) dx = dt
∣∣∣∣∣ =∫f(t) dt
4.2 Určitý integrálUrčitý integrál je jedným zo základných nastrojov, ktoré môžme využiť privýpočte plošných obsahov rovinných útvarov.
Definícia 4.2.1 Nech je daná spojitá a nezáporná funkcia f : y = f(x),kde f : 〈a; b〉 −→ R, 〈a; b〉 ⊆ D(f) ⊆ R. Pre interval 〈a; b〉 je dané de-lenie Dn, ktoré je dané n deliacimi bodmi Dn = x0;x1;x2; . . . ;xn, kdea = x0 < x1 < x2 < · · · < xn−1 < xn = b a 〈a; b〉 = ⋃n
i=1〈xi−1;xi〉. Označme∆xi = xi − xi−1 dĺžku i-teho intervalu pre i = 1, 2, . . . , n. Pre každé priro-dzené číslo n vieme vytvoriť nejaké delenie Dn intervalu 〈a; b〉 a dostávamepostupnosť delení Dn∞n=1 intervalu 〈a; b〉. Označme normu delenia Dn akočíslo ||Dn|| = max∆x1,∆x2, . . . ,∆xn−1,∆xn. Predpokladajme, že postup-nosť delení Dn∞n=1 je normálna (t. j. limx→∞ ||Dn|| = 0). Nech ξi je ľu-bovoľný bod z intervalu 〈xi−1;xi〉 pre i = 1, 2, 3, . . . , n. Označme S(f,Dn)integrálny súčet funkcie f pre delenie Dn intervalu 〈a; b〉 a pre danú voľbubodov ξ1; ξ2; . . . ; ξn, kde S(f,Dn) = ∑n
i=1 f(ξi) ·∆xi. Potom určitým integrá-lom funkcie f na intervale 〈a; b〉 nazývame číslo S = limx→∞ S(f,Dn) (limitapostupnosti integrálnych súčtov funkcie f na intervale 〈a; b〉), ak existuje.

4 VÝPOČET URČITÉHO INTEGRÁLU 72
Určitý integrál označujeme znakom∫ ba f(x) dx. 10 Číslo a nazývame dolná
hranica, číslo b nazývame horná hranica určitého integrálu.
Definícia 4.2.2 Nech funkcia f je definovaná a ohraničená na uzavretomintervale 〈a; b〉. Funkcia f je integrovateľná na intervale 〈a; b〉, ak pre každúnormálnu postupnosť Dn∞n=1 intervalu 〈a; b〉 je postupnosť integrálnych súč-tov S(f,Dn)∞n=1 funkcie f pre delenie Dn intervalu a ľubovoľné voľby číselξ1; ξ2; . . . ; ξn konvergentná.
Poznámka 4.2.1 Ak si označíme rovinný útvar – krivočiary lichobežník akomnožinu bodov K = [x, y] ∈ R2 : a 5 x 5 b ∧ 0 5 y 5 f(x), potom obsahtejto oblasti sa rovná číslu S, t.j. hodnote určitého integrálu
∫ ba f(x) dx.
Veta 4.2.1 (Newtonova-Leibnizova formula) Nech funkcie f : y = f(x)je integrovateľná na uzavretom intervale 〈a, b〉 a nech má na intervale 〈a, b〉primitívnu funkciu F : y = F (x). Potom platí:∫ b
af(x) dx = [F (x)]ba = F (b)− F (a).
Vlastnosti určitého integrálu:
(1)∫ ba f(x) dx = −
∫ ab f(x) dx
(2)∫ aa f(x) dx = 0
(3)∫ ba (f(x) + g(x)) dx =
∫ ba f(x) dx+
∫ ba g(x) dx
(4)∫ ba α · f(x) dx = α ·
∫ ba f(x) dx, kde α ∈ R
(5)∫ ba f(x) dx =
∫ ca f(x) dx+
∫ bc f(x) dx.
Veta 4.2.2 Ak je funkcia f : y = f(x) spojitá na intervale 〈a, b〉, tak funkciaf je na tomto intervale integrovateľná.
Veta 4.2.3 Nech je funkcia f : y = f(x) ohraničená na intervale 〈a, b〉a má na tomto intervale konečný počet bodov nespojitosti. Potom funkciaf : y = f(x) je na intervale 〈a, b〉 integrovateľná.
10Súčtovú definíciu integrálu zaviedol Cauchy pre spojité funkcie a Riemann pre nespo-jité funkcie. Názov určitý integrál zaviedol Bernoulli a symbol
∫je vlastne písmeno S,
ako začiatočné písmeno slova Summa, ktoré používal Leibniz, učiteľ Bernoulliho. Preto saurčitý integrál nazýva Riemannov integrál alebo Cauchyho-Riemannov integrál.

73 4.2 Určitý integrál
Veta 4.2.4 Nech funkcia f : y = k je konštantná funkcia (k ∈ R). Potomplatí:
∫ ba k dx = k · (b− a).
Veta 4.2.5 Nech funkcia f : y = f(x) je integovateľná a nezáporná funkciana intervale 〈a, b〉. Potom platí:
∫ ba f(x) dx = 0.
Veta 4.2.6 Nech funkcie f : y = f(x) a g : y = g(x) sú integovateľné funkciena intervale 〈a, b〉. Nech f(x) 5 g(x) pre všetky hodnoty x ∈ 〈a, b〉. Potomplatí:
∫ ba f(x) dx 5
∫ ba g(x) dx.
Veta 4.2.7 Nech funkcie f : y = f(x) a g : y = g(x) sú integovateľnéfunkcie na intervale 〈a, b〉. Nech g(x) = 0 pre všetky hodnoty x ∈ 〈a, b〉 am 5 f(x) 5 b. Potom platí:
∫ ba f(x) dx 5
∫ ba g(x) dx.
Veta 4.2.8 (Per partes) Nech funkcie u : y = u(x) a v : y = v(x) sú spojitodiferencovateľné na uzavretom intervale 〈a, b〉. Potom platí:∫ b
au(x) · v′(x) dx = [u(x) · v(x)]ba −
∫ b
au′(x) · v(x) dx.
Veta 4.2.9 (Substitúcia) Nech funkcia f : y = f(x) je spojitá na uzavre-tom intervale 〈a, b〉. Nech funkcia g : y = g(x) má spojitú prvú deriváciu naohraničenom a uzavretom intervale 〈c, d〉, pričom zobrazuje interval 〈c, d〉 dointervalu 〈a, b〉. Potom platí:∫ b
af(x) dx =
∫ d
cf(g(t)) · g′(t) dt,
kde g(c) = a a g(d) = b.
Definícia 4.2.3 Nech funkcie f : 〈a, b〉 −→ R a g : 〈a, b〉 −→ R sú spojité anech pre každé x ∈ 〈a, b〉 je f(x) 5 g(x). Potom množinu D = [x, y] ∈ R2 :a 5 x 5 b ∧ g(x) 5 y 5 f(x) nazývame elementárna oblasť v R2 vzhľadomna os ox.
Definícia 4.2.4 Nech funkcie φ : 〈c, d〉 −→ R a ψ : 〈c, d〉 −→ R sú spojité anech pre každé y ∈ 〈c, d〉 je φ(y) 5 ψ(y). Potom množinu H = [x, y] ∈ R2 :c 5 y 5 d ∧ φ(y) 5 x 5 ψ(y) nazývame elementárna oblasť v R2 vzhľadomna os oy.

4 VÝPOČET URČITÉHO INTEGRÁLU 74
Veta 4.2.10 Plošný obsah elementárnej oblasti D sa počíta podľa vzorca:
P =∫ b
a(f(x)− g(x)) dx.
Veta 4.2.11 Plošný obsah elementárnej oblasti H sa počíta podľa vzorca:
P =∫ d
c(ψ(y)− φ(y)) dy.
Veta 4.2.12 Ak krivka γ je grafom funkcie f : 〈a, b〉 −→ R, ktorá má spojitúprvú deriváciu, tak pre jej dĺžku d platí vzťah:
d =∫ b
a
√1 + (f ′(x))2 dx.
Veta 4.2.13 Nech funkcia f : y = f(x) je spojitá a nezáporná na uzavretomintervale 〈a, b〉, ktorá vytvára v rovine krivočiary lichobežník L nad interva-lom 〈a, b〉. Rotáciou krivočiareho lichobežníka L v priestore R3 s osami ox,oy a oz okolo osi ox vznikne rotačné teleso, ktorého objem V vypočítamepomocou vzorca:
V = limx→∞
n∑i=1
π · f 2(ξi) ·∆xi = π ·∫ b
af 2(x) dx.
Veta 4.2.14 Nech funkcia f : y = f(x) je spojitá, diferencovateľná a ne-záporná na uzavretom intervale 〈a, b〉, ktorá vytvára v rovine krivočiary li-chobežník L nad intervalom 〈a, b〉. Rotáciou krivočiareho lichobežníka L vpriestore R3 s osami ox, oy a oz okolo osi ox vznikne rotačné teleso, ktoréhoplošný obsah rotačnej plochy S vypočítame pomocou vzorca:
S = 2 · π ·∫ b
af(x) ·
√1 + (f ′(x))2 dx.

75 4.3 Numerické metódy výpočtu určitého integrálu
4.3 Numerické metódy výpočtu určitého integráluAko už vieme z predošlých kapitol, nie každá funkcia musí mať primitívnufunkciu, prípadne nájsť primitívnu funkciu môže byť veľmi komplikované. Ne-znalosť primitívnej funkcie nám neumožňuje použiť Newton-Leibnizovu for-mulu na výpočet určitého integrálu. Môžme ešte použiť definíciu určitého in-tegrálu, avšak jej použitie nie je veľmi praktické na výpočet. Preto je vhodnétúto definíciu vhodne upraviť tak, aby sme si približný výpočet určitého in-tegrálu, čo najviac zjednodušili. Na to využijeme takzvané Newton-Cotesovevzorce.Newton-Cotesove vzorce
Chceme vypočítač určitý integrál z funkcie f : y = f(x) na intervale 〈a, b〉:∫ b
af(x) dx. (35)
Newton-Cotesove kvadratúrne vzorce (kvadratúrna formula) dostaneme in-tegrovaním interpolačného polynómu s ekvidistantnými uzlami, ktorý ap-roximuje podintegrálnu funkciu f . Tieto vzorce môžme rozdeliť do dvochzákladných skupín:
• uzavreté vzorce, kde krajné body intervalu berieme za uzly kvadratúry
• otvorené vzorce, kde krajné body neberieme za uzly kvadratúry, aleuzly sú symetrické podľa stredu intervalu
V tejto kapitole sa budeme zaoberať jedným otvoreným vzorcom (obdĺžni-ková metóda) a dvomi uzavretými vzorcami (lichobežníková metóda a Simp-sonova metóda). Rozdiel medzi týmito metódami je v tom, akým polynómomaproximujeme podintegrálnu funkciu f . Pri obdĺžnikovej metóde použijemepolynóm nultého stupňa (konštantnú funkciu), pri lichobežníkovej metódepoužijeme polynóm prvého stupňa (lineárnu funkciu – priamku) a pri Sim-psonovej metóde použijeme polynóm druhého stupňa (kvadratickú funkciu– parabolu). Vieme, že určitý integrál z kladnej funkcie na intervale 〈a, b〉zodpovedá plošnému obsahu oblasti, ktorú ohraničuje funkcia f zhora, osx zdola a po stranách priamky x = a a x = b. Pri použití obdĺžníkovejmetódy budeme počítať plošné obsahy obdĺžníkov, ktoré budú aproximovaťuvedenú oblasť. Lichobežníková metóda počíta plošné obsahy lichobežníkov,ktoré aproximujú danú oblasť a pri Simpsonovej metóde počítame plošnéobsahy oblastí, ktoré zhora ohraničujú oblasť parabolami.

4 VÝPOČET URČITÉHO INTEGRÁLU 76
Obdĺžniková metódaNech je daný integrál (35). Interval 〈a, b〉 rozdelíme na n rovnakých častí,
čím získame n + 1 uzlových bodov x0, x1, x2, . . . , xn. Nech h ∈ R, pre ktoréplatí:
h = (b− a)n
. (36)
Potom uzlové body vieme vyjadriť pomocou konštanty h takto:
xi+1 = xi + h, (37)
kde i = 0, 1, 2, . . . , n − 1 a x0 = a, xn = b. Na každom intervale 〈xi, xi+1〉,pre i = 0, 1, 2, . . . , n − 1 aproximujeme funkciu f konštantnou funkciou fi:y = f
(xi+xi+1
2
)pre i = 0, 1, 2, . . . , n − 1. Obsah obdĺžnika nad intervalom
〈xi, xi+1〉, pre i ∈ 0, 1, 2, . . . , n− 1 sa dá vyjadriť vzťahom:
si = (xi+1 − xi) · f(xi + xi+1
2
). (38)
Potom pre súčet obsahov všetkých n obdĺžnikov platí:
s(n) =n−1∑i=0
si =n−1∑i=0
(xi+1 − xi) · f(xi + xi+1
2
).
Vzhľadom na vzťahy (36) a (37) môžme tento súčet upraviť na tvar:
s(n) =n−1∑i=0
h · f(xi + xi + h
2
)= h ·
n−1∑i=0
f
(xi + h
2
). (39)
Výsledný vzťah pre výpočet určitého integrálu obdĺžnikovou metódou s ndeleniami intervalu má tvar:∫ b
af(x) dx ≈ s(n) = h ·
n−1∑i=0
f
(xi + h
2
). (40)
Pre odhad chyby platí:∣∣∣∣∣s(n)−∫ b
af(x) dx
∣∣∣∣∣ 5 (b− a)2
2n ·M1, (41)
kde M1 = maxx∈〈a,b〉 |f ′(x)|.

77 4.3 Numerické metódy výpočtu určitého integrálu
Lichobežníková metódaNech je daný integrál (35) zo strany 75. Rozdeľme interval 〈a, b〉 na n
rovnakých častí, čím získame n + 1 uzlových bodov x0, x1, x2, . . . , xn. Dĺžkakaždého intervalu 〈xi, xi+1〉 je rovná číslu h ∈ R, pre ktoré platí vzťah(36). Potom uzlové body vieme vyjadriť pomocou vzťahu (37), kde i ∈0, 1, 2, . . . , n−1, pričom x0 = a a xn = b. Na každom intervale 〈xi, xi+1〉, prei = 0, 1, 2, . . . , n−1 aproximujeme funkciu f lineárnou funkciou fi: y = fi(x),ktorá prechádza bodmi [xi, f(xi)] a [xi+1, f(xi+1)] pre i = 0, 1, 2, . . . , n − 1.Obsah pôvodnej oblasti nad intervalom 〈xi, xi+1〉 nahradíme obsahom licho-bežníka nad intervalom 〈xi, xi+1〉, pre i ∈ 0, 1, 2, . . . , n − 1, ktorý sa dávyjadriť vzťahom:
si = 12 · h · (f(xi) + f(xi+1)) . (42)
Potom pre integrál (35) platí:∫ b
af(x) dx =
∫ x1
x0f(x) dx+
∫ x2
x1f(x) dx+
∫ x3
x2f(x) dx+ · · ·
· · ·+∫ xn−1
xn−2f(x) dx+
∫ xn
xn−1f(x) dx ≈
≈ s0 + s1 + s2 + · · ·+ sn−2 + sn−1 =
= h
2 · (f(x0) + f(x1)) + h
2 · (f(x1) + f(x2)) + h
2 · (f(x2) + f(x3)) + · · ·
· · ·+ h
2 · (f(xn−2) + f(xn−1)) + h
2 · (f(xn−1) + f(xn)) =
= h
2 ·[
(f(x0) + f(x1)) + (f(x1) + f(x2)) + (f(x2) + f(x3)) + · · ·
· · ·+ (f(xn−2) + f(xn−1)) + (f(xn−1) + f(xn))]
=
= h
2 ·[f(x0)+2·f(x1)+2·f(x2)+2·f(x3)+· · · 2·f(xn−2)+2·f(xn−1)+f(xn)
]∫ b
af(x) dx ≈ h
2 ·[f(x0) + f(xn) + 2 ·
n−1∑i=1
f (xi)]. (43)
Pre odhad chyby platí:∣∣∣∣∣s(n)−∫ b
af(x) dx
∣∣∣∣∣ 5 (b− a)3
12n2 ·M2, (44)
kde M2 = maxx∈〈a,b〉 |f ′′(x)|.

4 VÝPOČET URČITÉHO INTEGRÁLU 78
Simpsonova metódaPri Simpsonovej metóde budeme postupovať podobne ako pri lichobež-
níkovej metóde. Máme určiť približnú hodnotu integrálu (35) zo strany 75.Rozdeľme interval 〈a, b〉 na párny počet n = 2m, m ∈ N rovnakých častí,čím získame n+ 1 uzlových bodov x0, x1, x2, . . . , xn. Dĺžka každého intervalu〈xi, xi+1〉 je rovná číslu h ∈ R, pre ktoré platí vzťah (36). Potom uzlové bodyvieme vyjadriť pomocou vzťahu (37), kde i ∈ 0, 1, 2, . . . ,m − 1, pričomx0 = a a xn = b. Na každom intervale 〈x2i, x2i+2〉, pre i = 0, 1, 2, . . . ,m − 1aproximujeme funkciu f kvadratickou funkciou fi: y = fi(x), ktorá prechádzabodmi [x2i, f(x2i)], [1
2(x2i+x2i+2), f(12(x2i+x2i+2))] a [x2i+2, f(x2i+2)]. Obsah
pôvodnej oblasti nad intervalom 〈xi, xi+1〉 nahradíme obsahom krivočiareholichobežníka nad intervalom 〈xi, xi+1〉, pre i ∈ 0, 1, 2, . . . , n − 1, ktorý sadá vyjadriť vzťahom:
si = 13 · h · (f(xi) + f(xi+1)) . (45)
Potom pre integrál (35) platí:∫ b
af(x) dx =
∫ x1
x0f(x) dx+
∫ x2
x1f(x) dx+
∫ x3
x2f(x) dx+ · · ·
· · ·+∫ xn−1
xn−2f(x) dx+
∫ xn
xn−1f(x) dx ≈
≈ s0 + s1 + s2 + · · ·+ sn−2 + sn−1 =
= h
3 · (f(x0) + 4f(x1 + 2f(x2)) + h
3 · (f(x2) + 4f(x3 + f(x4))) +
+h3 · (f(x4) + 4f(x5 + f(x6))) + · · ·
· · ·+ h
3 ·(f(xn−4) + 4f(xn−3 + f(xn−2)))+ h
3 ·(f(xn−2) + 4f(xn−1) + f(xn)) =
= h
3 ·[
(f(x0) + 4f(x1) + f(x2)) + (f(x2) + 4f(x3) + f(x4)) +
+ (f(x4) + 4f(x5) + f(x6)) + · · ·
· · ·+ (f(xn−4) + 4f(xn−3) + f(xn−2)) + (f(xn−2) + 4f(xn−1) + f(xn))]
=
= h
3 ·[f(x0)+4·f(x1)+2·f(x2)+4·f(x3)+· · ·+2·f(xn−2)+4·f(xn−1)+f(xn)
]

79 4.3 Numerické metódy výpočtu určitého integrálu
∫ b
af(x) dx ≈ h
3 ·
f(x0) + f(xn) + 4 ·n2∑i=1
f (x2i−1) + 2 ·n−2
2∑i=1
f (x2i)
. (46)
Pre odhad chyby platí:∣∣∣∣∣s(n)−∫ b
af(x) dx
∣∣∣∣∣ 5 (b− a)5
180n4 ·M4, (47)
kde M4 = maxx∈〈a,b〉 |f (iv)(x)|.Pre odhad chyby sa tiež zvykne používať aj vzťah v tvare:∣∣∣∣∣s(n)−
∫ b
af(x) dx
∣∣∣∣∣ 5 (b− a)180 · h4 ·M4, (48)
kde M4 = maxx∈〈a,b〉 |f (iv)(x)|.Pri Simpsonovej metóde nesmieme zabúdať na to, že počet deliacich bo-
dov v intervale 〈a, b〉 musí byť vždy párny. Vyplýva to zo vzťahu (45) nastrane 78. Rovnako musíme dávať pozor, aj keď odhadujeme počet deliacichbodov n pri danom ε, lebo najbližšie väčšie prirodzené číslo môže byť ajnepárne.

4 VÝPOČET URČITÉHO INTEGRÁLU 80
4.4 Riešené príkladyPríklad 4.4.1 Vypočítajte nasledujúce neurčité integrály:
(a)∫ (
4x2 − 2x+ 3−√x− 1
4√x3
)dx
(b)∫ (2− x)2
x3 dx
(c)∫x2 · cosx dx
(d)∫ (arctg x)5
x2 + 1 dx
Riešenie:(a) Integrál prepíšeme pomocou pravidiel pre integrovanie tak, aby sme mohlipoužiť integračné vzorce.
∫ (4x2 − 2x+ 3−
√x− 1
4√x3
)dx =
= 4 ·∫x2 dx− 2 ·
∫x dx+ 3 ·
∫1 dx−
∫x
12 dx−
∫x−
34 dx =
= 4 · x2+1
2 + 1 − 2 · x1+1
1 + 1 + 3 · x− x12 +1
12 + 1 −
x−34 +1
−34 + 1 + c =
= 4 · x3
3 − 2 · x2
2 + 3 · x− x32
32− x
14
14
+ c =
= 43x
3 − x2 + 3x− 23√x3 − 4 4
√x+ c.
(b) Podintegrálnu funkciu upravíme na taký tvar, aby sme mohli použiť pra-vidlá pre integrovanie a integračné vzorce.
∫ (2− x)2
x3 dx =∫ (
4− 2x+ x2
x3
)dx =
∫ (4x3 −
2xx3 + x2
x3
)dx =
=∫ 4x3 dx−
∫ 2xx3 dx+
∫ x2
x3 dx = 4 ·∫x−3 dx− 2 ·
∫x−2 dx+
∫ 1x
dx =

81 4.4 Riešené príklady
4 x−3+1
−3 + 1 − 2 x−2+1
−2 + 1 + ln |x|+ c = 4x−2
−2 − 2x−1
−1 + ln |x|+ c =
= −2x2 + 2
x+ ln |x|+ c
(c) Podintegrálna funkcia je súčinom polynómu a goniometrickej funkciecosx. V takýchto prípadoch integrujeme túto funkciu metódou per-partes.∫x2 · cosx dx PP=
∣∣∣∣∣ u = x2 v′ = cosxu′ = 2x v = sin x
∣∣∣∣∣ = x2 · sin x−∫
2x · sin x dx =
= x2 · sin x− 2 ·∫x · sin x dx PP=
∣∣∣∣∣ u = x v′ = sin xu′ = 1 v = − cosx
∣∣∣∣∣ =
= x2 · sin x− 2 ·[x · (− cosx)−
∫1 · (− cosx) dx
]=
= x2 · sin x+ 2 · x · cosx− 2 ·∫
cosx dx =
= x2 · sin x+ 2x · cosx− 2 · sin x+ c
(d) Ak sa pozrieme na podintegrálnu funkciu a uvedomíme si, čomu je rovnáderivácia funkcie arctg x, tak na výpočet tohto neurčitého integrálu je vhodnépoužiť substitučnú metódu.
∫ (arctg x)5
x2 + 1 dx Sub=
∣∣∣∣∣∣arctg x = t
11 + x2 dx = 1 dt
∣∣∣∣∣∣ =∫t5 dt = t5+1
5 + 1 + c =
= t6
6 + c = 16 · t
6 + c = 16 · (arctg x)6 + c
√
Príklad 4.4.2 Vypočítajte daný určitý integrál Lichobežníkovou metódous presnosťou ε = 10−3, ak
2∫1
ln (x2 + 4) dx.
Riešenie:Označme podintegrálnu funkciu f : y = ln (x2 + 4). Aby sme zistili počet

4 VÝPOČET URČITÉHO INTEGRÁLU 82
delení n, potrebujeme vypočítať prvú a druhú deriváciu funkcie f a potomvyužijeme odhad chyby pri výpočte určitého integrálu Lichobežníkovou me-tódou.
y′ =(ln (x2 + 4)
)′= 2xx2 + 4 y′′ =
( 2xx2 + 4
)′= 8− 2x2
(x2 + 4)2 .
Vypočítame hodnotu M2 = maxx∈〈1,2〉
|f ′′(x)| = maxx∈〈1,2〉
∣∣∣∣∣ 8− 2x2
(x2 + 4)2
∣∣∣∣∣ = 0,24. Pre
určenie počtu delení n využijeme vzťah (44) na strane 77, z ktorého si vy-jadríme premennú n. Distávame nerovnosť:
n =
√(b− a)3 ·M2
12 · ε =√
13 · 0,2412 · 0,001 =
√20 .= 4,47.
Vieme, že n ∈ N, preto z nerovnosti n = 4,47 vyplýva, že stačí zvoliť n =5. Potom pre h platí: h = b− a
n= 0,2. Vytvoríme tabuľku pre výpočet
funkčných hodnôt.
Tabuľka 5: Lichobežníková metóda.k xk yk = f(xk)0 1,0 1,6094381 1,2 1,6937792 1,4 1,7850713 1,6 1,8809914 1,8 1,9796215 2,0 2,079442
Na základe hodnôt z tabuľky 5 môžme vypočítať približnú hodnotu zadanéhourčitého integrálu:
2∫1
ln (x2 + 4) dx ≈ h
2 ·[(y0 + y5) + 2 ·
4∑i=1
yi
]=
= 0,22 ·[(1,609438+2,079442)+2·(1,693779+1,785071+1,880991+1,979621)
]=
= 0,22 · 18,36780216 = 1,83678.

83 4.4 Riešené príklady
Približná hodnota určitého integrálu je:
2∫1
ln (x2 + 4) dx ≈ 1,83678.
Odhadneme chybu nášho výpočtu pomocou vzťahu (44):∣∣∣∣∣s(5)−∫ b
af(x) dx
∣∣∣∣∣ 5 (b− a)3
12n2 ·M2 = (2− 1)3
12 · 52 · 0,24 = 0,0008 < 0,001.
√

4 VÝPOČET URČITÉHO INTEGRÁLU 84
4.5 Neriešené úlohy4.1 Vypočítajte dané neurčité integrály.
a)∫ (
x6 − 4 · x3 + 3)
dx,
b)∫ (
1− 2 · x2)2
dx,
c)∫ (x− 2)3
x2 dx,
d)∫ 5√x− 6 · 4
√x3
√x
dx,
e)∫
(5 · sin4 x · cosx) dx,
f)∫
tg x dx,
g)∫
tg 2 x dx,
h)∫ex · (x2 + 3 · x− 4) dx,
i)∫
sin(3x− 7) dx,
j)∫e8−3x dx,
k)∫e1−4x2 · 2x dx,
l)∫
(1− 6x) · ln(2x− 6x2) dx,
m)∫ 3x2 + 2x3 + 2x− 6 dx,
n)∫ ln x
2x dx,
o)∫ ln2 x
6x dx,

85 4.5 Neriešené úlohy
p)∫
ln x dx,
r)∫
(x3 + 3x) · ln x dx,
s)∫ tg 3x
cos2 xdx,
t)∫
(4x+ 2)15 dx,
u)∫ 1x · ln4 x
dx,
4.2 Vypočítajte dané určité integrály.
a)∫ 1
−1
(x3 + 4x2 − 2x+ 1
)dx,
b)∫ 1
0
(x3 · e2x
)dx,
c)∫ π
2
π4
2 · sin x · cosx dx,
d)∫ e
1x · ln x dx,
e)∫ 9
3
(13x− 2
)8dx,
f)∫ π
0tg x dx,
g)∫ 1
02x · ex2 dx.
4.3 Vypočítajte určité integrály pomocou Lichobežníkovej metódy pre danýpočet delení n na intervale I = 〈a, b〉.
a)∫ 1
−1
(2x3 − 5x+ 1
)dx, n = 16,
b)∫ 1,2
0
(e2x2) dx, n = 10,

4 VÝPOČET URČITÉHO INTEGRÁLU 86
c)∫ π
2
π4
3 · sin3 2x · cos2 x dx, n = 6,
d)∫ e
1x3 · ln
√x2 + 1 dx, n = 10,
e)∫ 4
3
(13x
2 − 1)5
dx, n = 8,
f)∫ π
4
0tg x dx, n = 12,
g)∫ 1
0sin x · ex2 dx, n = 10,
h)∫ 2
1
sin xx
dx, n = 8.
4.4 Vypočítajte odhad chyby pre integrály z úlohy 4.3.
4.5 Vypočítajte určitý integrál Simpsonovou metódou s presnosťou ε =10−5 a odhadnite chybu výpočtu, ak∫ 0
−1
1− x(x+ 2)2 dx.
4.6 Vypočítajte integrál z úlohy 4.3 písmeno f) obdĺžnikovou metódou aodhadnite chybu výpočtu, ak je daná presnosť ε = 10−3.

87 4.6 Výsledky neriešených úloh
4.6 Výsledky neriešených úloh4.1 a) 1
7 ·x7−x4 +3x+c b) 4
5 ·x5− 4
3 ·x3 +x+c c) 1
2 ·x2−6x+6 · ln x+ 8
x+c
d) 107 ·
10√x7 − 24
5 · x 4√x+ c e) sin5 x+ c f) − ln | cosx|+ c g) tg x− x+ c h)
ex · (x2 +x−5)+ c i) −13 ·cos (3x− 7)+ c j) −1
3 ·e8−3x+ c k) −1
4 ·e1−4x2 + c l)
(3x2− 1) · (2− ln (2x− 6x2)) + c m) ln |x3 + 2x− 6|+ c n)(
12 · ln x
)2+ c o)
118 · ln
3 x+ c p) x · (ln x− 1) + c r)(
14x
4 + 32x
2)·(ln x− 1
4
)+ c s) 1
4 · tg4x+ c
t) 164 · (4x+ 2)16 + c u) −1
3·ln3 x+ c
4.2 a) 143 b) 1
8 · e2 + 3
8 c) 12 d) 1
4 · (e2 + 1) e) 2
3 f) 0 g) e− 1
4.3 a) 2,0000000000 b) 4,8046382541 c) 0,3168332310 d) 11,7688920106e) 442,9627421238 f) 0,3469302083 g) 0,7829408000 h) 0,6591551087
4.4 1
4.5 0
4.6 −1

5 LINEÁRNA ALGEBRA 88
5 Lineárna algebra
5.1 Vektorový priestorDefinícia 5.1.1 Vektorovým priestorom nad poľom F nazývame množinuV , na ktorej je definované sčítanie prvkov z V a násobenie prvkov z V prv-kami z F tak, že platí:
(1) ∀~a,~b ∈ V : ~a+~b ∈ V(2) ∀~a ∈ V , ∀α ∈ F : α · ~a ∈ V(3) ∀~a,~b ∈ V : ~a+~b = ~b+ ~a
(4) ∀~a,~b,~c ∈ V : ~a+ (~b+ ~c) = (~a+~b) + ~c
(5) ∃~0 ∈ V , ∀~a ∈ V : ~a+~0 = ~a
(6) ∀~a ∈ V , ∃~b ∈ V : ~a+~b = ~0(7) ∀~a,~b ∈ V , ∀α ∈ F : α · (~a+~b) = α · ~a+ α ·~b(8) ∀α, β ∈ F , ∀~a ∈ V : (α + β) · ~a = α · ~a+ β · ~a(9) ∀α, β ∈ F , ∀~a ∈ V : (α · β) · ~a = α · (β · ~a)(10) ∀~a ∈ V : 1 · ~a = ~a
Ak pole F je množina reálnych čísel R a prvky množiny V sú usporiadanén-tice reálnych čísel z množiny Rn, tak potom vektorový priestor V = Rn
nazývame n-rozmerný aritmetický vektorový priestor. Označme nulový vek-tor ~0 = (0, 0, 0, . . . , 0) ∈ Rn. Jednotkový vektor s jednotkou na k-tej pozíciioznačme písmenom ~ek = (0, 0, . . . , 0, 1, 0, . . . , 0) ∈ Rn.
Z definície 5.1.1 ľahko vidieť nasledujúce dôsledky:
(a) jednoznačnosť nulového prvku(b) zákon krátenia pre sčítanie (t. j. ~a+ ~u = ~b+ ~u =⇒ ~a = ~b)(c) jednoznačnosť opačného vektora (t. j. (∀~a ∈ V )(∃!(−~a) ∈ V ) :
~a+ (−~a) = ~0)(d) α · ~a = ~0 ⇐⇒ (α = 0 ∨ ~a = ~0) pre α ∈ F ∧ ~a ∈ V(e) (−1) · ~a = −~a pre ~a ∈ V
Definícia 5.1.2 Podpriestorom vektorového priestoru V nazývame takú ne-prázdnu množinu W , ∅ 6= W ⊆ V :

89 5.1 Vektorový priestor
(1) ∀a, b ∈ W : a+ b ∈ W(2) ∀a ∈ W , ∀α ∈ F : α · a ∈ W
Definícia 5.1.3 Nech ~a1,~a2, . . . ,~an ∈ V . Lineárnou kombináciou vektorov~a1,~a2, . . . ,~an nazývame ľubovoľný vektor ~u: ~u = α1 ·~a1 +α2 ·~a2 + · · ·+αn ·~an,kde α1, . . . , αn ∈ F .
Definícia 5.1.4 Obálka systému S vektorov z V (lineárny obal) je množinavšetkých lineárnych kombinácií všetkých konečných podsystémov systému S.Označíme ju [S].
Definícia 5.1.5 Netriviálna lineárna kombinácia vektorov ~a1, . . . ,~ak je takálineárna kombinácia α1 ·~a1 +α2 ·~a2 +· · ·+αk ·~ak, že aspoň jeden z koeficientovα1, . . . , αk je rôzny od nuly. Triviálna lineárna kombinácia vektorov ~a1, . . . ,~akje lineárna kombinácia 0·~a1+0·~a2+· · ·+0·~ak (t. j. ∀i ∈ 1, 2, . . . , k : αi = 0).
Definícia 5.1.6 Systém vektorov ~a1, . . . ,~ak ⊆ V sa nazýva lineárne zá-vislý, ak existuje netriviálna lineárna kombinácia vektorov ~a1, . . . ,~ak prektorú platí: α1 ·~a1+α2 ·~a2+· · ·+αn ·~an = ~0. Systém vektorov ~a1, . . . ,~ak ⊆ Vsa nazýva lineárne nezávislý, ak nie je lineárne závislý.
Definícia 5.1.7 Systém vektorov ∅ 6= S ⊆ V je lineárne závislý, ak exis-tuje konečný podsystém vektorov ~a1, . . . ,~ak ⊆ S, kde systém vektorov~a1, . . . ,~ak je lineárne závislý. Systém vektorov ∅ 6= S ⊆ V je lineárne ne-závislý, ak každý konečný podsystém systému S je lineárne nezávislý.
Definícia 5.1.8 Bázou vektorového priestoru V nazývame systém ∅ 6= S ⊆V , ktorý spĺňa nasledujúce podmienky:
(1) S je lineárne nezávislý systém vektorov,(2) systém S generuje vektorový priestor V t. j. [S] = V .
Definícia 5.1.9 Vektorový priestor V nazývame konečnorozmerný, ak exis-tuje konečný systém vektorov S ⊆ V , ktorý generuje vektorový priestorV . Nekonečnorozmerný vektorový priestor je taký, ktorý nie je konečno-rozmerný.

5 LINEÁRNA ALGEBRA 90
Definícia 5.1.10 Dimenzia konečnorozmerného vektorového priestoru V jepočet vektorov jeho bázy. Označíme ju dim(V ), dim(~0) = 0.
Definícia 5.1.11 Hodnosťou systému S konečnorozmerného vektorového pries-toru V rozumieme dim([S]).11
Definícia 5.1.12 Systémy vektorov S a T vo vektorovom priestore V nazý-vame ekvivalentnými, ak platí [S] = [T ].12
Dovolené zmeny:13
(1) zmena poradia určujúcich (generujúcich) vektorov,(2) vynásobenie ľubovoľného vektora nenulovým reálnym číslo α ∈ F , α 6= 0,(3) pripočítanie lineárnej kombinácie ostatných vektorov k nejakému vektoru,(4) vynechať vektor, ktorý je lineárnou kombináciou ostatných vektorov,(5) pridanie vektora, ktorý je lineárnou kombináciou ostatných vektorov.
Veta 5.1.1 Nech ~a ∈ V . Systém ~a je lineárne závislý práve vtedy, ak~a = ~0.
Veta 5.1.2 Systém vektorov ~a1, . . . ,~ak ⊆ V , kde k > 1 je lineárne závislýpráve vtedy, ak aspoň jeden z vektorov sa dá vyjadriť ako lineárna kombináciaostatných vektorov.
Veta 5.1.3 Systém vektorov ~a1, . . . ,~ak ⊆ V , kde k > 1 je lineárne ne-závislý práve vtedy, ak ani jeden z vektorov sa nedá vyjadriť ako lineárnakombinácia ostatných vektorov.
Veta 5.1.4 Systém vektorov ~a1, . . . ,~ak ⊆ V je lineárne nezávislý, ak platí:
(1) Každá netriviálna lineárna kombinácia vektorov ~a1, . . . ,~ak je rôznaod nuly.
(2) Iba triviálna lineárna kombinácia vektorov ~a1, . . . ,~ak je rovná nule.(3) α1 · ~a1 + α2 · ~a2 + · · ·+ αk · ~ak = ~0 =⇒ α1 = 0 ∧ α2 = 0 ∧ · · · ∧ αk = 0.
11Hodnosť systému S je daná jednoznačne.12Jeden systém vektorov má nekonečne veľa báz. Ak dve bázy určujú ten istý systém
vektorov, tak jedna z báz vznikla z druhej bázy pomocou dovolených zmien.13Sú to zmeny resp. ekvivalentné úpravy, ktoré nezmenia vektorový priestor.

91 5.1 Vektorový priestor
Veta 5.1.5 Vo vektorovom priestore V = Rn je každý systém vektorov ob-sahujúci viac ako n vektorov už lineárne závislý.
Veta 5.1.6 Každý konečnorozmerný vektorový priestor rôzny od ~0 mákonečnú bázu.
Veta 5.1.7 Ak vektorový priestor V má konečnú bázu pozostávajúcu z nvektorov, tak každá báza vektorového priestoru V má n prvkov.
Veta 5.1.8 Vo vektorovom priestore V , kde dim(V )= n, každý systém vek-torov pozostávajúci z väčšieho počtu ako n vektorov je už lineárne závislý.
Veta 5.1.9 V konečnorozmernom vektorovom priestore, každý lineárne ne-závislý systém vektorov možno rozšíriť na bázu.
Veta 5.1.10 Nech V je konečnorozmerný vektorový priestor a dim(V )= n >0. Nech ~a1, . . . ,~an je ľubovoľný systém vektorov vo V . Potom nasledujúcepodmienky sú ekvivalentné:
(1) ~a1, . . . ,~an je lineárne nezávislý systém vektorov.(2) [~a1, . . . ,~an] = V .(3) ~a1, . . . ,~an je bázou V .
Veta 5.1.11 Systémy vektorov S a T sú ekvivalentné práve vtedy, ak S ⊆[T ] ∧ T ⊆ [S].
Veta 5.1.12 Každý z nasledujúcich systémov vektorov je ekvivalentný sosystémom vektorov ~a1, . . . ,~ai, . . . ,~aj, . . . ,~ak:
(1) ~a1, . . . ,~ai, . . . ,~aj, . . . ,~ak,(2) ~a1, . . . , α · ~ai, . . . ,~aj, . . . ,~ak, kde α 6= 0,(3) ~a1, . . . ,~ai, . . . ,~aj + α · ~ai, . . . ,~ak,(4) ~a1, . . . ,~ai, . . . ,~aj, . . . ,~ak, α1 · ~a1 + · · ·+ αk · ~ak.

5 LINEÁRNA ALGEBRA 92
5.2 MaticeDefinícia 5.2.1 Matica typu m×n je systém prvkov zapísaných do tabuľkys m riadkami a n stĺpcami, pričom m, n sú prirodzené čísla. Zapisujeme ichdo okrúhlych zátvoriek:
A =
a11 a12 . . . a1na21 a22 . . . a2n... ... . . . ...am1 am2 . . . amn
,
kde aij sú prvky matice A pre i = 1, 2, . . . ,m a j = 1, 2, . . . , n. Matice väč-šinou označujeme veľkými písmenami a využívame aj skrátený zápis matice:A = aij, i = 1, 2, . . . ,m a j = 1, 2, . . . , n.
Popíšeme niektoré špeciálne typy matíc:
Obdĺžniková matica: Všeobecná matica typu m×n, matica s m riadkamia n stĺpcami.
Štvorcová matica: Matica, ktorá má rovnaký počet riadkov a stĺpcov, ma-tica typu n× n.
Stĺpcová matica: Matica typu m× 1. Tiež ju nazývame stĺpcový vektor.
Riadková matica: Matica typu 1× n. Tiež ju nazývame riadkový vektor.
Nulová matica: Matica typu m × n, ktorá má všetky prvky nulové, t. j.∀i, j : aij = 0. Označíme 0.
Diagonálna matica: Štvorcová matica typu n× n, kde aij = 0, pre i 6= j,i, j ∈ 1, 2, . . . , n. Označenie: diaga11, a22, . . . , ann = diagaii, i ∈1, 2, . . . , n.
Jednotková matica: Diagonálna matica, kde I = diaga11, a22, . . . , ann,aii = 1, i ∈ 1, 2, . . . , n.
Horná trojuholníková matica: Štvorcová matica typu n×n s nulami podhlavnou diagonálou, t. j. aij = 0, pre j < i, i, j ∈ 1, 2, . . . , n.
Dolná trojuholníková matica: Štvorcová matica typu n×n s nulami nadhlavnou diagonálou, t. j. aij = 0, pre i < j, i, j ∈ 1, 2, . . . , n.

93 5.2 Matice
Transponovaná matica: Transponovaná matica A> k matici A typum×nje matica typu n × m, pre ktorú platí: aij = aji, i ∈ 1, 2, . . . ,m,j ∈ 1, 2, . . . , n, t. j. navzájom vymeníme riadky a stĺpce matice A.
Symetrická matica: Matica A je symetrická, ak pre prvky matice A platí:aij = aij pre všetky i, j.
Definícia 5.2.2 Hovoríme, že matice A = aij a B = bij sa rovnajú(píšeme A = B), ak matice A, B sú rovnakého typu (majú rovnaký početriadkov a stĺpcov) a aij = bij pre všetky i, j.
Zadefinujeme základné operácie s maticami.
Definícia 5.2.3 Súčtom dvoch matíc A = aij a B = bij je maticaC = cij (píšeme C = A+B), ak matice A, B a C sú rovnakého typu a preprvky matice C platí: cij = aij + bij, ∀i ∈ 1, 2, . . . ,m, ∀j ∈ 1, 2, . . . , n.
Definícia 5.2.4 Hovoríme, že matice D je α násobkom matice A (píšemeD = α ·A, α ∈ R), ak pre prvky matice D platí: dij = α · aij pre všetky i, j.
Definícia 5.2.5 Nech sú dané matice A typu m×p a B typu p×n. Súčinomdvoch matíc A a B je matica C typu m × n (píšeme C = A · B), pre ktorúplatí: cij = ∑p
l=1 ail · blj pre i = 1, 2, . . . ,m, j = 1, 2, . . . , n.
Základné vlastnosti matíc:
(1) A = A, reflexívnosť relácie „=“.(2) Ak A = B, potom B = A, symetrickosť relácie „=“.(3) Ak A = B a súčasne B = C, potom A = C, tranzitívnosť relácie „=“.(4) (−1) · A = −A.(5) A+ (−A) = A− A = 0.(6) A+ A> je symetrická matica.(7) A · I = I · A = A, kde A je ľubovoľná štvorcová matica.(8) Ak existuje súčin matíc A ·B, tak súčin B · A nemusí existovať.(9) A ·B 6= B · A vo všeobecnosti.(10) A+B = B + A, komutatívnosť vzhľadom na operáciu „+“.(11) A+ (B + C) = (A+B) + C, asociatívnosť vzhľadom na operáciu „+“.(12) A+ 0 = A.(13) α · (A+B) = α · A+ α ·B.

5 LINEÁRNA ALGEBRA 94
(14) (α + β) · A = α · A+ β ·B.(15) (A ·B) · C = A · (B · C), asociatívnosť vzhľadom na operáciu „·“.(16) (A+B) · C = A · C +B · C, distributívnosť.(17) A · (B + C) = A ·B + A · C, distributívnosť.(18) (A ·B)> = B> · A>.
Definícia 5.2.6 Nech A je matica typu m×n. Nech h1 je dimenzia systémuriadkových vektorov a h2 je dimenzia systému stĺpcových vektorov. Číslo h =h1 = h2 nazývame hodnosť matice A a označujeme ju symbolom h(A) = h.
Definícia 5.2.7 Nech A je štvorcová matica typu n×n. Hovoríme, že maticaA je regulárna, ak h(A) = n (singulárna, ak h(A) < n).
Elementárne úpravy matíc sú také úpravy matíc na riadkoch (resp. stĺp-coch) matice, ktoré nemenia hodnosť matice. Elementárne úpravy matíczvykneme tiež nazývať riadkové (resp. stĺpcové) transformácie matice.
(1) Výmena dvoch riadkov (stĺpcov) matice.(2) Vynásobenie ľubovoľného riadka (stĺpca) matice nenulovým reálnym
číslom.(3) Pripočítanie násobku ľubovoľného riadka (stĺpca) matice k inému
riadku (stĺpcu) matice.(4) Vynechanie nulového riadka (stĺpca) matice.(5) Pridanie nulového riadka (stĺpca) k matici.
Definícia 5.2.8 Maticu B nazývame ekvivalentnou s maticou A, ak maticuB možno odvodiť z matice A konečným počtom elementárnych transformácií.Tento vzťah je reflexívny, symetrický a tranzitívny.
Nech je daná ľubovoľná matica A typu m × n. Vieme, že pre hodnosťmatice A platí: 0 5 h(A) 5 minm,n. Hodnosť nulovej matice je nula. Preľubovoľnú nenulovú maticu A platí: h(A) ∈ N. Hodnosť matice A je dimenzialineárneho obalu stĺpcových alebo riadkových vektorov matice A.
Definícia 5.2.9 Nech A je štvorcová matica typu n × n. Ak k matici Aexistuje taká matica B, že platí: A · B = B · A = I, potom maticu Bnazývame inverznou maticou k matici A a označujeme ju symbolom A−1.

95 5.3 Determinanty
Veta 5.2.1 Nech A je štvorcová matica typu n× n. Nutnou a postačujúcoupodmienkou pre existenciu inverznej matice A−1 k matici A je, aby maticaA bola regulárna t. j. h(A) = n (det(A) 6= 0).
Pre inverzné matice platí:
(1) (A−1)−1 = A,(2) A · A−1 = A−1 · A,(3) diag(a1, a2, . . . , an)·diag(b1, b2, . . . , bn) = I práve vtedy, ak ai · bi = 1,(4) (A ·B)−1 = B−1 · A−1,(5) (A1 · A2 · · · · · Ak−1 · Ak)−1 = A−1
k · A−1k−1 · · · · · A−1
2 · A−11 .
5.3 DeterminantyNech je daná štvorcová matica A = aij typu n × n. Matici A môžmepriradiť reálne číslo, ktoré nazývame determinant. Zadefinujeme ho pomocounasledujúcich definícií.
Definícia 5.3.1 Nech je daná štvorcová matica A = aij typu n× n. Sub-determinant matice A prislúchajúci k prvku aij matice A je determinantmatice, ktorá vznikne z matice A tak, že vynecháme i-ty riadok a j-ty stĺpecmatice A pre i, j ∈ 1, 2, . . . , n.
Definícia 5.3.2 Algebraickým doplnkom (doplnkom) patriaci k prvku aijštvorcovej matice A = aij typu n × n nazývame súčin čísla (−1)i+j asubdeterminantu patriaceho k prvku aij pre i, j ∈ 1, 2, . . . , n. Označujemeho: det(Aij) = (−1)i+j · det(Aij).
Definícia 5.3.3 Nech je daná štvorcová matica A = aij typu n × n. De-terminant matice A je reálne číslo, ktoré označujeme: det(A) alebo |A| aplatí:
(1) det(A) = a11, ak matica A = aij je typu 1× 1,
(2) det(A) =∣∣∣∣∣ a11 a12a21 a22
∣∣∣∣∣ = a11 · a22 − a12 · a21,
(3) det(A) =
∣∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣∣ = a11 · a22 · a33 + a21 · a32 · a13++a31 · a12 · a23 − (a13 · a22 · a31+a23 · a32 · a31 + a31 · a12 · a23),

5 LINEÁRNA ALGEBRA 96
(4) det(A) =
∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 . . . a1(n−1) a1na21 a22 . . . a2(n−1) a2n... ... . . .
... ...a(n−1)1 a(n−1)2 . . . a(n−1)(n−1) a(n−1)nan1 an2 . . . an(n−1) ann
∣∣∣∣∣∣∣∣∣∣∣∣∣=
= ∑nk=1 akj · det(Akj) = ∑n
l=1 ail · det(Ail) pre ľubovoľné i ∈ 1, 2, . . . , n,j ∈ 1, 2, . . . , n.
Veta 5.3.1 Nech A> je transponovaná matica k štvorcovej matici A, potomdet(A) = det(A>).
Veta 5.3.2 Nech matica B je matica, ktorá vznikla zo štvorcovej matice Avýmenou dvoch riadkov (stĺpcov). Potom det(B) = − det(A).
Veta 5.3.3 Ak B je matica, ktorá vznikla zo štvorcovej matice A vynáso-bením všetkých prvkov niektorého riadku (stĺpca) matice A reálnym číslomα, tak platí det(B) = α · det(A).
Veta 5.3.4 Nech B je matica, ktorá vznikla zo štvorcovej matice A tak,že k niektorému riadku (stĺpcu) matice A pripočítame lineárnu kombiná-ciu zvyšných riadkov (stĺpcov) matice A. Potom pre hodnotu determinantumatice B platí det(B) = det(A).
Veta 5.3.5 Nech A je štvorcová matica. Determinant matice A je rovnýnule (det(A) = 0) práve vtedy, ak aspoň jeden riadok (stĺpec) matice A jelineárnou kombináciou zvyšných riadkov (stĺpcov) matice A.
Veta 5.3.6 Ak štvorcová maticaA obsahuje aspoň dva rovnaké riadky (stĺpce),tak det(A) = 0.
Veta 5.3.7 Ak štvorcová maticaA obsahuje aspoň jeden nulový riadok (stĺpec),tak det(A) = 0.
Veta 5.3.8 Platí:
det(A) =
∣∣∣∣∣∣∣∣∣∣a11 + b11 a12 + b12 . . . a1n + b1na21 a22 . . . a2n... ... . . .
...an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣=

97 5.4 Sústavy lineárnych rovníc
=
∣∣∣∣∣∣∣∣∣∣a11 a12 . . . a1na21 a22 . . . a2n... ... . . .
...an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣+
∣∣∣∣∣∣∣∣∣∣b11 b12 . . . b1na21 a22 . . . a2n... ... . . .
...an1 an2 . . . ann
∣∣∣∣∣∣∣∣∣∣Veta 5.3.9 Ak štvorcová matica A je v trojuholníkovom tvare, tak det(A) =det(diaga11, a22, . . . , ann) = a11 · a22 · · · · · ann.
Veta 5.3.10 Matica A typu n×n je regulárna práve vtedy, ak det(A) 6= 0.
Definícia 5.3.4 Nech A je štvorcová matica typu n × n. Potom maticuAdj(A)
Adj(A) =
det(A11) det(A21) . . . det(An1)det(A12) det(A22) . . . det(An2)
... ... . . ....
det(A1n) det(A2n) . . . det(Ann)
nazývame adjungovaná matica k matici A (je to transponovaná matica al-gebraických doplnkov k prvkom matice A).
Veta 5.3.11 Ak A je regulárna štvorcová matica typu n×n, tak pre inverznúmaticu A−1 k matici A platí: A−1 = 1
det(A) · Adj(A).
Veta 5.3.12 NechA je štvorcová matica typu n×n. Potom platí: det(Adj(A)) =(det(A))n−1.
5.4 Sústavy lineárnych rovnícDefinícia 5.4.1 Sústavou (systémom) m lineárnych rovníc o n neznámychnad množinou reálnych čísel R nazývame konečnú postupnosť rovníc S:
a11 · x1 + a12 · x2 + · · ·+ a1n · xn = b1
a21 · x1 + a22 · x2 + · · ·+ a2n · xn = b2
a31 · x1 + a32 · x2 + · · ·+ a3n · xn = b3... = ...
am1 · x1 + am2 · x2 + · · ·+ amn · xn = bm,

5 LINEÁRNA ALGEBRA 98
kde ~x = (x1, x2, . . . , xn)> je vektor neznámych premenných, aij ∈ R sú koefi-cienty sústavy S a ~b = (b1, b2, b3, . . . , bm)> je vektor, ktorý nazývame pravástrana sústavy lineárnych rovníc S.
Definícia 5.4.2 Základné pojmy pre sústavu lineárnych rovníc (SLR) S,ktorá má m rovníc a n neznámych:
Homogénna sústava lineárnych rovníc: Ak pre každé i ∈ 1, 2, . . . ,mplatí: bi = 0, tak sústava S sa nazýva homogénna sústava lineárnychrovníc (HSLR).
Nehomogénna sústava lineárnych rovníc: Ak existuje i ∈ 1, 2, . . . ,mtaké, že platí: bi 6= 0, tak sústava S sa nazýva nehomogénna sústavalineárnych rovníc (skrátene len SLR).
Riešenie SLR: Usporiadanú n-ticu reálnych čísel (c1, c2, c3, . . . , cn)> na-zývame riešením SLR S, ak platí ∑n
j=1 aij · cj = bi pre všetky i ∈1, 2, . . . ,m.
Množina riešení SLR: Množina všetkých vektorov ~c = (c1, c2, c3, . . . , cn)>,ktoré sú riešením SLR S nazývame množina riešení SLR S a označímeju Ω.
Triviálne riešenie HSLR: Nulový vektor nazývame triviálnym riešením(nulové riešenie) HSLR.
Netriviálne riešenie HSLR: Ak riešenie HSLR má aspoň jednu zložku ne-nulovú, potom takéto riešenie nazývame netriviálnym riešením HSLR.
Nulová rovnica: Rovnica 0 · x1 + 0 · x2 + · · ·+ 0 · xn = 0 sa nazýva nulovárovnica.
Sporná rovnica: Rovnica 0 · x1 + 0 · x2 + · · · + 0 · xn = bi pre nejaké i ∈1, 2, . . . ,m, kde bi 6= 0 sa nazýva sporná rovnica.
Ekvivalentné SLR: Sústava S1 je ekvivalentná so sústavou S2 práve vtedy,ak obe majú tú istú množinu riešení Ω. Označíme tento vzťah: S1 ∼ S2resp. S1 ≈ S2.
Vedúci člen rovnice: Prvý nenulový koeficient zľava aij 6= 0 pre nejakéi ∈ 1, 2, . . . ,m sa nazýva vedúci člen rovnice ri: ai1 · x1 + ai2 · x2 +· · ·+ aij · xj + · · ·+ ain · xn = bi. Koeficienty ai1 až ai,j−1 sú nulové.

99 5.4 Sústavy lineárnych rovníc
Gaussov tvar SLR: Sústava lineárnych rovníc S je v Gaussovom tvare, akplatí: Ak i < j, tak vedúci člen aik i-tej rovnice ri má menší stĺpcovýindex ako vedúci člen ajl j-tej rovnice rj (t. j. k < l). Sústavu lineárnychrovníc v Gaussovom tvare budeme označovať Sg.
Elementárne úpravy pre sústavy lineárnych rovníc, ktoré nemenia mno-žinu riešení:
(1) Vynechanie nulovej rovnice.(2) Vynásobenie ľubovoľnej rovnice nenulovým reálnym číslom.(3) Pripočítanie jednej rovnice k inej rovnici.(4) Výmena ľubovoľných dvoch rovníc.(5) Pripočítanie k jednej rovnici lineárne kombinácie ostatných rovníc.
Definícia 5.4.3 Nech je daná SLR S a nech Sg je ekvivalentná sústava vGaussovom tvare so sústavou S. Počet nenulových rovníc sústavy Sg sa na-zýva hodnosť sústavy S a označíme ju h(S).
Definícia 5.4.4 Nech ~w1, ~w2, . . . , ~wk; ~wi = (c1i, c2i, . . . , cni); i ∈ 1, 2, 3, . . . , ksú riešenia SLR S (aj HSLR). Nech α1, α2, . . . , αk ∈ R. Potom vektor ~w =α1 · ~w1 +α2 · ~w2 +α3 · ~w3 + · · ·+αk · ~wk sa nazýva lineárna kombinácia riešení~w1, ~w2, . . . , ~wk.
Definícia 5.4.5 Množina riešení ~w1, ~w2, . . . , ~wk sa nazýva fundamentálnysystém riešení HSLR S, ak platí:
(1) Každé riešenie ~w je lineárnou kombináciou riešení ~w1, ~w2, . . . , ~wk, t. j.(∀w ∈ Ω(S)): ~w = ∑k
i=1 αi · ~wi.
(2) Riešenia ~w1, ~w2, . . . , ~wk sú lineárne nezávislé, t. j. žiadne riešenie ~wi prei ∈ 1, 2, 3, . . . , k nie je lineárnou kombináciou riešení ~w1, ~w2, . . . , ~wi−1,~wi+1, . . . , ~wk.
Veta 5.4.1 Každá sústava m lineárnych rovníc o n neznámych S sa dá ele-mentárnymi úpravami upraviť na Gaussov tvar.

5 LINEÁRNA ALGEBRA 100
Veta 5.4.2 Nech S ∈ Sm,n(R)14 a nech S ∼ S1 ∼ S2 ∼ · · · ∼ Sg. Potomplatia nasledujúce tvrdenia:
(1) Ω(S) = Ω(Sg).
(2) Ak Sg obsahuje spornú rovnicu, tak Ω(S) = ∅.
(3) Ak sa počet nenulových rovníc sústavy Sg rovná počtu neznámych, tak|Ω(S)| = 1.
(4) Ak Ω(S) 6= ∅ a počet nenulových rovníc sústavy Sg je menší ako početneznámych, tak Ω(S) je nekonečná množina.
Veta 5.4.3 Nech S je HSLR a nech ~w1 a ~w2 sú riešenia HSLR S. Potom aj~w = ~w1 + ~w2 je riešením HSLR S.
Veta 5.4.4 Nech S je HSLR a nech ~w1 je riešenie HSLR S a α ∈ R. Potomaj ~w = α · ~w1 je riešením HSLR S.
Veta 5.4.5 Nech S je HSLR. Ak ~w1, ~w2, . . . , ~wk sú riešenia HSLR S, tak ajich lineárna kombinácia ~w = α1 · ~w1 + α2 · ~w2 + α3 · ~w3 + · · · + αk · ~wk jeriešením HSLR S, kde α1, α2, . . . , αk ∈ R.
Veta 5.4.6 Nech S je HSLR, S ∈ Sm,n(R). Sústava S má iba triviálne rie-šenie práve vtedy, ak h(S) = n.
Veta 5.4.7 Fundamentálny systém riešení HSLR S má q = n−h(S) prvkov,ak h(S) < n.
Veta 5.4.8 Nech S ∈ Sm,n(R) a nech Sh je HSLR prislúchajúca k sústaveS15. Ak ~w1 ∈ Ω(S) a ~w2 ∈ Ω(S), tak ~w1 − ~w2 ∈ Ω(Sh).
Veta 5.4.9 Nech S ∈ Sm,n(R) je SLR a nech Sh je HSLR prislúchajúca k sú-stave S. Nech ~w1, ~w2, . . . , ~wn−h, kde h = h(S) < n je fundamentálny systémriešení HSLR Sh. Nech ~w? je (partikulárne16) riešenie sústavy S. Potom prekaždé riešenie ~w ∈ Ω(S) existujú také reálne čísla α1, α2, . . . , αn−h ∈ R, žeplatí: ~w = ~w? + α1 · ~w1 + α2 · ~w2 + α3 · ~w3 + · · ·+ αn−h · ~wn−h.
14Sm,n(R) je označenie množiny všetkých sústav m lineárnych rovníc o n neznámychnad množinou reálnych čísel R.
15HSLR prislúchajúca k sústave S ∈ Sm,n(R) je sústava Sh, ktorá má rovnaké koeficientyaij ako sústava S, ale pravá strana sústavy Sh sa rovná nulovému vektoru.
16Partikulárne riešenie sústavy S je ľubovoľné riešenie ~w? sústavy S.

101 5.5 Numerické riešenie sústav lineárnych rovníc
Veta 5.4.10 (Frobeniova veta) Nech S ∈ Sm,n(R) je SLR a nech Sh jeHSLR prislúchajúca k sústave S. Sústava S má riešenie práve vtedy, akh(S) = h(Sh). Navyše ak h(S) = h(Sh) = n, tak sústava S má práve jednoriešenie. Ak h(S) = h(Sh) < n, tak sústava S má nekonečne veľa riešení.
Veta 5.4.11 (Cramerovo pravidlo) Nech S ∈ Sm,n(R) je SLR. SústavaS má za predpokladu, že determinant D = det(S) 6= 0, jediné riešenie~w =
(D1D, D2D, D3D, . . . , Dn
D
), pričom D je determinant sústavy S t. j. matice
aijni,j=1 a Di je determinant, ktorý vznikne z determinantu D tak, že i-tystĺpec nahradíme pravou stranou ~b, kde i ∈ 1, 2, 3, . . . , n.
5.5 Numerické riešenie sústav lineárnych rovníc
Iteračné metódy, na rozdiel od presných metód, zväčša nevedú k presnémuriešeniu po konečnom počte krokov výpočtu. Pri iteračných metódach zvo-líme na začiatku počiatočnú aproximáciu riešenia a určitým postupom (algo-ritmom) toto riešenie v každom kroku iteračnej metódy zlepšíme. Tak sa po-stupne približujeme k riešeniu, ktoré sa vo všeobecnosti dosahuje až v limite.Keďže výpočet nemôžme robiť pre nekonečne veľa krokov, tak ho ukončímepo konečnom počte krokov. Tak získame približné riešenie sústavy lineárnychrovníc.
Jacobiho metódaNech je daná SLR, ktorá má n rovníc a aj n neznámych.
a11 · x1 + a12 · x2 + · · ·+ a1n · xn = b1
a21 · x1 + a22 · x2 + · · ·+ a2n · xn = b2
a31 · x1 + a32 · x2 + · · ·+ a3n · xn = b3... = ...
an1 · x1 + an2 · x2 + · · ·+ ann · xn = bn,
Z prvej rovnice vyjadríme premennú x1, z druhej rovnice vyjadríme premennú

5 LINEÁRNA ALGEBRA 102
x2 až z n-tej rovnice vyjadríme premennú xn. Dostaneme SLR v tvare:
x1 = 1a11· (b1 − a12 · x2 − · · · − a1n · xn)
x2 = 1a22· (b2 − a21 · x1 − · · · − a2n · xn)
x3 = 1a33· (b3 − a31 · x1 − a32 · x2 − · · · − a3n · xn)
... = ...xn = 1
ann· (bn − an1 · x1 − an2 · x2 − · · · − an−1,n−1 · xn−1)
Na začiatku zvolíme ľubovoľnú počiatočnú aproximáciu riešenia, ktorú ozna-číme horným indexom nula ~x(0) = (x(0)
1 , x(0)2 , x
(0)3 , . . . , x(0)
n )>. Toto riešeniedosadíme do pravej strany upravenej SLR a dostaneme novú aproximáciuriešenia ~x(1) = (x(1)
1 , x(1)2 , x
(1)3 , . . . , x(1)
n )>. Takto postupujeme, až dostanemek-tu aproximáciu riešenia SLR v tvare ~x(k) = (x(k)
1 , x(k)2 , x
(k)3 , . . . , x(k)
n )>. Po-tom k + 1-ú aproximáciu riešenia SLR vypočítame podľa predpisu:
x(k+1)1 = 1
a11·(b1 − a12 · x(k)
2 − · · · − a1n · x(k)n
)x
(k+1)2 = 1
a22·(b2 − a21 · x(k)
1 − · · · − a2n · x(k)n
)x
(k+1)3 = 1
a33·(b3 − a31 · x(k)
1 − a32 · x(k)2 − · · · − a3n · x(k)
n
)... = ...
x(k+1)n = 1
ann·(bn − an1 · x(k)
1 − an2 · x(k)2 − · · · − an−1,n−1 · x(k)
n−1
)
Takýmto postupom budeme vytvárať postupnosť aproximácií riešenia SLR~x(0), ~x(1), ~x(2), ~x(3), . . . , ~x(k), . . . , ktorá môže konvergovať k presnému rie-šeniu SLR. Vo výpočte pokračujeme dovtedy, pokiaľ nedosiahneme vopredstanovenú presnosť (t. j. aproximácia riešenia sa ustáli na požadovanom po-čte desatinných miest alebo prekročíme vopred stanovený maximálny početiterácií a pod.).
Jacobiho metóda nemusí vždy konvergovať k presnému riešeniu SLR.Preto si uvedieme podmienky, za ktorých táto metóda konverguje.

103 5.5 Numerické riešenie sústav lineárnych rovníc
Definícia 5.5.1 Matica A sa nazýva ostro riadkovo diagonálne dominantnápráve vtedy, ak platí vzťah:
|aii| >n∑j=1i 6=j
|aij| pre i = 1, 2, . . . , n (49)
Matica A sa nazýva ostro stĺpcovo diagonálne dominantná práve vtedy, akplatí vzťah:
|ajj| >n∑i=1i6=j
|aij| pre j = 1, 2, . . . , n (50)
Teraz ukážeme, kedy Jacobiho metóda konverguje. Upravenú SLR si môžmezapísať v maticovom tvare:
~x = C · ~x+ ~d, (51)
kde matica C je iteračná matica Jacobiho metódy a ~d je iteračný vektor.Prvky uvedenej matice a vektora majú tvar:
cij = −aijaii
pre i 6= j, cii = 0
di = biaii
Pôvodnú sústavu lineárnych rovníc A · ~x = ~b sme upravili na sústavu ~x =C · ~x+ ~d a našou úlohou je nájsť riešenie SLR, ktorý zodpovedá úlohe nájsťpevný bod zobrazenia:
F (~x) = C · ~x+ ~d, (52)
lebo riešením pôvodnej SLR je práve taký vektor ~x, pre ktorý platí: F (~x) = ~x.Potom všeobecný iteračný krok má tvar:
~x(k+1) = F (~x(k)) = C · ~x(k) + ~d. (53)
Máme zobrazenie F : Rn −→ Rn, kde Rn je vektorový priestor všetkých uspo-riadaných n-tíc reálnych čísel. Na tomto priestore môžme definovať metrikupredpisom:
d(~x, ~y) = ||~x− ~y||,

5 LINEÁRNA ALGEBRA 104
kde || · || je norma. Priestor Rn s touto metrikou je úplný. Potrebujeme ešteoveriť, kedy je zobrazenie F kontraktívne. Platí:
d(F (~x), F (~y) = ||F (~x)− F (~y|| = ||C · ~x+ ~d− C · ~y + ~d|| = ||C · (~x− ~y)|| 5
5 ||C|| · ||~x− ~y|| = ||C|| · d(~x, ~y),
kde ||C|| je norma matice. Vieme, že ak je ||C|| < 1, tak zobrazenie F jekontraktívne s koeficientom kontrakcie α = ||C||. Takto sme zabezpečili, žepostupnosť postupných aproximácií riešenia podľa nášho vzťahu konvergujek pevnému bodu nášho zobrazenia F . Ostáva ukázať, ako overiť podmienku||C|| < 1. Vo všeobecnosti to môže byť komplikované, ale pre SLR je overenietejto podmienky jednoduché, lebo súvisí s diagonálnou dominanciou maticeA. Ak je matica A riadkovo (stĺpcovo) diagonálne dominantná matica, potomJacobiho metóda konverguje.
Ak je splnená podmienka ||C|| < 1, tak pre odhad chyby pre k- tu iteráciuplatí:
||~x(k) − ~x|| 5 ||C||1− ||C|| · ||~x
(k) − ~x(k−1)|| (54)
||~x(k) − ~x|| 5 ||C||k
1− ||C|| · ||~x(0) − ~x(1)|| (55)
Pomocou týchto odhadov môžme rozhodnúť, kedy zastaviť iteračný pro-ces, ak máme dané ε > 0.
Gauss-Seidelova metódaNech je daná SLR, ktorá má n rovníc a n neznámych.
a11 · x1 + a12 · x2 + · · ·+ a1n · xn = b1
a21 · x1 + a22 · x2 + · · ·+ a2n · xn = b2
a31 · x1 + a32 · x2 + · · ·+ a3n · xn = b3... = ...
an1 · x1 + an2 · x2 + · · ·+ ann · xn = bn,
Gauss-Seidelova metóda je veľmi podobná Jacobiho metóde, ale líši sa odnej v tom, že pri výpočte ďalšej aproximácie riešenia používa vždy najnov-šie hodnoty vektora ~x = (x1, x2, x3, . . . , xn)>, ktoré máme k dispozícii. Tak

105 5.5 Numerické riešenie sústav lineárnych rovníc
dostaneme upravený iteračný vzťah:
x(k+1)1 = 1
a11·(b1 − a12 · x(k)
2 − · · · − a1n · x(k)n
)x
(k+1)2 = 1
a22·(b2 − a21 · x(k+1)
1 − a13 · x(k)3 − · · · − a2n · x(k)
n
)x
(k+1)3 = 1
a33·(b3 − a31 · x(k+1)
1 − a32 · x(k+1)2 − · · · − a3n · x(k)
n
)... = ...
x(k+1)n = 1
ann·(bn − an1 · x(k+1)
1 − an2 · x(k+1)2 − · · · − an−1,n−1 · x(k+1)
n−1
)
Dá sa ukázať, že ak matica sústavy A je ostro riadkovo (stĺpcovo) diago-nálne dominantná, tak Gauss-Seidelova metóda konverguje.

5 LINEÁRNA ALGEBRA 106
5.6 Riešené príkladyPríklad 5.6.1 Sústavu lineárnych rovníc upravte ekvivalentnými úpravamina sústavu s diagonálne dominantnou maticou. Vykonajte 3 kroky Jacobihoiteračnej metódy zo zvoleného počiatočného bodu a odhadnite nepresnosť potreťom kroku, ak SLR má tvar:
x− 7y + 2z = 7,3−x+ 2y + 11z = −818x− 11y − 8z = 21,3
Riešenie:V prvom kroku upravíme danú SLR na diagonálne dominantný tvar. Tretiurovnicu r3 dáme ako prvú a prvú a druhú rovnicu posunieme o jednu nižšie.Dostaneme tak sústavu:
18x− 11y − 8z = 21,3x− 7y + 2z = 7,3
−x+ 2y + 11z = −8
Prvú rovnicu nahradíme rovnicou r1 − r2 a dostávame SLR s diagonálnedominantnou maticou:
17x− 4y − 10z = 14x− 7y + 2z = 7,3
−x+ 2y + 11z = −8
Z tejto sústavy vytvoríme iteračný vzorec Jacobiho metódy.
x(k+1) = 417y
(k) + 1017z
(k) + 1417
y(k+1) = 17x
(k) + 27z
(k) − 7,37
z(k+1) = 111x
(k) − 211y
(k) − 811

107 5.6 Riešené príklady
Túto sústavu môžme napísať aj v tvare:
x(k+1) = 0,2353y(k) + 0,5882z(k) + 0,8235y(k+1) = 0,1429x(k) + 0,2857z(k) − 1,0429z(k+1) = 0,091x(k) − 0,1818y(k) − 0,7273
Za počiatočnú aproximáciu zvolíme vektor: x(0) = 0,8235, y(0) = −1,0429,z(0) = −0,7273. Vytvoríme tabuľku, v ktorej zapíšeme jednotlivé aproximá-cie. Ešte musíme odhadnúť chybu pre naše riešenie: x(3) = 0,184054, y(3) =
Tabuľka 6: Riešenie SLR Jacobiho iteračnou metóduk x(k) y(k) z(k)
0 0,8235 −1,0429 −0,72731 0,15031 −1,13301 −0,52002 0,25104 −1,169985 −0,619093 0,184054 −1,1839 −0,591905
−1,1839, z(3) = −0,591905. Vypočítame normu matice ||C|| = max0,2353+0,5882, 0,1429+0,2857, 0,091+0,1818= max0,8235, 0,4286, 0,7788= 0,8235 <1. Potom pre odhad chyby platí:
||~x(k) − ~x|| 5 ||C||1− ||C|| · ||~x
(k) − ~x(k−1)||
||~x(k) − ~x|| 5 0,82351− 0,8235 · 0,066986 = 0,3125.
√

5 LINEÁRNA ALGEBRA 108
5.7 Neriešené úlohy5.1 Vypočítajte maticu C = 5 · A+ 1
2 ·B, ak
a) A =(
3 −4 1−2 7 3
), B =
(1 −2 7
10 4 3
)
b) A =
1 1 −1−2 0 3
0 1 1
, B =
2 −2 48 4 6
−10 2 −2
5.2 Vypočítajte maticu A2, A3 a A4, ak
a) A =(
2 −10 3
)
b) A =
1 −1 00 2 −12 −1 1
5.3 Vypočítajte maticu C = A ·B, ak
a) A =
1 1 1 11 2 3 41 2 4 71 3 6 10
a B =
1 1 −2 −40 1 0 −1−1 −1 3 6
2 1 −6 −10
b) A =
1 1 1 11 2 3 41 2 4 7
a B =
1 0 −2 −20 1 0 −10 −1 3 30 1 0 1
c) A =
1 11 21 −20 3−3 0
a B =(
1 0 −2 −20 1 0 −1
)
d) A =(
1 1 0 −1 −12 3 4 −3 −2
)a B =
1 00 12 −2−1 3
1 4

109 5.7 Neriešené úlohy
5.4 Vypočítajte hodnosť matice A, ak
a) A =
1 2 0 3−2 0 1 1
1 2 −1 −4−1 2 0 −3
b) A =
3 2 16 1 81 0 34 3 2
c) A =(
1 0 −1 3−6 0 6 −18
)
d) A =
3 1 2 40 1 1 10 1 1 2
e) A =
−2 3
1 32
6 −9−2 3
f) A =
0 2 1 0 31 1 0 1 02 1 1 0 13 0 2 1 1
g) A =
0 4 2 0 61 1 0 1 0−4 −2 −2 0 −2
6 0 4 2 2−3 3 0 1 4
h) A =
1 0 0 0 00 2 0 0 0−4 −1 3 0 −2
0 0 2 4 20 0 0 4 5

5 LINEÁRNA ALGEBRA 110
5.5 Overte, či matica A je regulárna alebo singulárna, ak
a) A =
1 2 −12 2 11 4 0
b) A =
1 1 14 0 24 2 3
c) A =
0 1 3 4−3 2 1 −4−1 5 2 −3
7 0 −4 1
d) A =
1 3 1 41 1 −4 11 1 9 21 2 5 5
5.6 Vypočítajte elementárnymi úpravami inverznú maticu k matici A, ak
a) A =
−2 −1 12 0 0−2 1 1
b) A =
2 −1 20 −1 33 −1 1
c) A =
1 0 0 03 1 0 0−5 2 1 0
7 3 2 1
d) A =
3 0 1 0−2 2 −2 1
0 2 −3 2−1 1 −2 1
5.7 Vypočítajte determinant matice A, ak

111 5.7 Neriešené úlohy
a) det (A) =
∣∣∣∣∣∣∣1 3 −1−1 −2 2
2 1 −1
∣∣∣∣∣∣∣b) det (A) =
∣∣∣∣∣∣∣1 0 0−5 1 0
7 4 −1
∣∣∣∣∣∣∣
c) det (A) =
∣∣∣∣∣∣∣∣∣1 2 3 4−1 0 −3 −8−1 1 0 −13
2 3 5 15
∣∣∣∣∣∣∣∣∣
d) det (A) =
∣∣∣∣∣∣∣∣∣∣∣∣
1 1 1 1 21 1 1 −2 11 1 2 1 11 −2 1 1 12 1 1 1 1
∣∣∣∣∣∣∣∣∣∣∣∣5.8 Použitím Frobeniovej vety ukážte existenciu, alebo neexistenciu riešeniapre nasledujúce systémy lineárnych rovníc S:
a)
x+ y − z = 12x+ y − z = 2
y + z = 4x− y − 3z = −7
b)
x+ y − z = 22x+ y − z = 2
y + z = 4x− y − 3z = 7

5 LINEÁRNA ALGEBRA 112
5.9 Riešte nasledujúce systémy lineárnych rovníc S:
a)
x1 + 2x2 − x3 − 2x4 = −22x1 + x2 + x3 + x4 = 8x1 − x2 − x3 + x4 = 1
x1 + 2x2 + 2x3 − x4 = 4
b)
2x1 − x2 − x3 + 3x4 = 12x1 − x2 − 2x4 = 4
8x1 − 4x2 + x3 − 13x4 = 196x1 − 3x2 − x3 − x4 = 9
c)
2x1 + 2x2 − 2x3 + 5x4 = −62x1 − x2 + x3 − x4 = 1
2x1 − x2 − 3x4 = 24x1 − 2x2 + x3 − 4x4 = −3
5.10 Jacobiho iteračnou metódou riešte sústavu lineárnych rovníc s pres-nosťou ε = 10−3, ak
18x1 − 19x2 + 2x3 = −12−2x1 + x2 − 15x3 = 15
2x1 + 21x2 − x3 = 23

113 5.8 Výsledky neriešených úloh
5.8 Výsledky neriešených úloh
5.1 a) C =( 31
2 −21 172
−5 37 332
)b) C =
6 4 −3−6 2 18−5 6 4
5.2 a) A2 =
(2 −10 3
), A3 =
(2 −10 3
), A4 =
(2 −10 3
)
b)A2 =
1 −3 1−2 5 −3
4 −5 2
,A3 =
3 −5 4−8 15 −8
0 −16 7
,A4 =
11 −23 12−24 46 −23
22 −47 23
5.3 a) C =
2 2 −5 96 4 −17 −28
11 6 −32 −5215 8 −44 −71
b) C =
1 1 1 11 3 7 91 5 10 15
c) C =
1 1 −2 −31 2 −2 −41 −2 −2 00 3 0 −3−3 0 6 6
d) C =(
1 −611 −22
)
5.4 a) h(A) = 2 b) h(A) = 3 c) h(A) = 1 d) h(A) = 3 e) h(A) = 1 f)h(A) = 4 g) h(A) = 4 h) h(A) = 55.5 a) regulárna b) singulárna c) regulárna d) singulárna
5.6 a) A−1 = 12 ·
0 1 0−1 0 1
1 2 1
b) A−1 =
2 −1 −19 −4 −63 −1 −2
c) A−1 =
1 0 0 0−3 1 0 011 −2 1 0−20 1 −2 1
d) A−1 =
1 0 −1 21 1 −1 1−2 0 5 −6−4 −1 6 −10
5.7 a) det (A) = 6 b) det (A) = −1 c) det (A) = 24 d) det (A) = 305.8 a) h(S) = h(Sh) = 3 b) h(S) = 4 ∧ h(Sh) = 35.9 a) Ω(S) = ~x ∈ R4 : ~x = (1, 2, 1, 3) b) Ω(S) = ~x ∈ R4 : ~x =
(2, 0, 3, 0) + α · (12 , 1, 0, 0) + β · (1, 0, 5, 1);α, β ∈ R c) Ω(S) = ∅
5.10 ~xk = (0, 5; 1;−1)

Registerčíselná množina
celé čísla, 10iracionálne čísla, 10prirodzené čísla, 10racionálne čísla, 10reálne čísla, 10
čísloalgebraické, 11transcendentné, 11
adjungovaná matica, 97algebraický doplnok, 95antiderivácia, 69aproximácia funkcie, 59
báza vektorového priestoru, 89
dĺžka krivky, 73derivácia, 31
Cauchyho veta, 34L‘Hospitalovo pravidlo, 34Lagrangeova veta, 33Rolleho veta, 33sprava, 31zľava, 31
determinant matice, 95adjungovaná matica, 97algebraický doplnok, 95subdeterminant, 95
dimenzia vektorového priestoru, 90
ekvivalentné matice, 94ekvivalentné SLR, 99ekvivalentné systémy vektorov, 90
fundamentálny systém riešení SLR, 99
funkcia, 13aproximácia funkcie, 59bodinflexný, 36, 45stacionárny, 35
cyklometrická, 24arkuskosínus (arccos), 24arkuskotangens (arccotg ), 24arkussínus (arcsin), 24arkustangens (arctg ), 24
definičný obor, 13derivácia, 31sprava, 31zľava, 31
exponenciálna, 20goniometrická, 20kosínus (cos), 20kotangens (cotg ), 20sínus (sin), 20tangens (tg ), 20
integrovateľná, 71interpolácia, 59inverzný Lagrangeov interpolačný
polynóm, 61konštantná, 13konkávna, 35konvexná, 35kvadratická, 16Lagrangeov interpolačný polynóm,
59lineárna, 13logaritmická, 20lokálne maximum, 35lokálne minimum, 35
114

115 REGISTER
maximum, 35metóda najmenších štvorcov, 61sústava normálnych rovníc, 63
minimum, 35mocninová, 17obor hodnôt, 13ostré lokálne maximum, 35ostré lokálne minimum, 35spojitá, 28na množine, 28na otvorenom intervale, 28na uzavretom intervale, 28sprava, 28zľava, 28
Gauss-Seidelova metóda, 104Gaussov tvar SLR, 99
integrálintegračné vzorce, 70integrovanie, 70metóda per-partes, 70neurčitý, 69Newton-Leibnizova formula, 71numerická metódalichobežníková, 77obdĺžniková, 76Simpsonova, 78
numerický výpočet, 75Newton-Cotesove vzorce, 75
substitučná metóda, 71určitý, 71elementárna oblasť, 73per-partes, 72substitúcia, 73vlastnosti, 72
interpolácia, 59inverzný Lagrangeov interpolačný po-
lynóm, 61
Jacobiho iteračná metóda, 101diagonálne dominantná matica, 102ostro riadkovo, 102ostro stĺpcovo, 102
Lagrangeov interpolačný polynóm, 59limita funkcie, 26
L‘Hospitalovo pravidlo, 34limita sprava, 26limita zľava, 26nevlastná, 28vlastná, 28
lineárna kombinácia riešení SLR, 99
matica, 92štvorcová, 92adjungovaná matica, 97diagonálna, 92dolná trojuholníková, 92ekvivalencia matíc, 94elementárne úpravy, 94hodnosť, 94horná trojuholníková, 92inverzná, 94jednotková, 92nulová, 92obdĺžniková, 92operácie s maticami, 93reálny násobok, 93rovnosť, 93súčet, 93súčin, 93
prvok matice, 92regulárna, 94riadková, 92stĺpcová, 92symetrická, 93transponovaná, 93

REGISTER 116
typu m× n, 92základné vlastnsti, 93
metóda najmenších štvorcov, 61sústava normálnych rovníc, 63
množinadolné ohraničenie, 12horné ohraničenie, 12infimum, 12ohraničená, 12suprémum, 12zdola ohraničená, 12zhora ohraničená, 12
neurčitý inetgrál, 69Newton-Leibnizova formula, 71
objem rotačného telesa, 74
plošný obsah elementárnej oblasti, 73plošný obsah rotačného telesa, 74primitívna funkcia, 69
rovnicaFourierova podmienka, 52metóda bisekcie, 46metóda prostej iterácie, 48kontraktívne zobrazenie, 48pevný bod zobrazenia, 48
Newtonova metóda, 51
sústava lineárnych rovníc, 97Cramerovo pravidlo, 100ekvivalencia SLR, 99elementárne úpravy, 99Frobeniova veta, 100fundamentálny systém riešení, 99Gauss-Seidelova metóda, 104Gaussov tvar, 99hodnosť, 99
homogénna, 97Jacobiho iteračná metóda, 101lineárna kombinácia riešení, 99množina riešení, 99nehomogénna, 99nulová rovnica, 99riešenie, 99netriviálne, 99triviálne, 99
sporná rovnica, 99vedúci člen rovnice, 99
systém lineárnych rovníc, 97systém vektorov, 89
hodnosť, 90lineárne nezávislý, 89lineárne závislý, 89
určitý integrál, 71
vektor, 88jednotkový, 88lineárna kombinácia, 89netriviálna, 89triviálna, 89
lineárny obal, 89nulový, 88
vektorový priestor, 88báza, 89dimenzia, 90hodnosť systému vektorov, 90konečno-rozmerný, 89nekonečno-rozmerný, 89podpriestor, 88
vetaCauchyho, 34Cramerovo pravidlo, 100Frobeniova, 100L‘Hospitalovo pravidlo, 34

117 REGISTER
Lagrangeova, 33Rolleho, 33
zobrazeniekontraktívne, 48pevný bod, 48

LITERATÚRA 118
Literatúra[1] Berežný Š. – Mislivcová V.: Prehľad základov z matematiky, LF TU,
Košice (2009) ISBN: 978-80-553-0241-6.
[2] Bučko M. – Buša J. – Schrötter Š.: Lineárna algebra, Elfa, Košice (2001).
[3] Buša J. – Pirč V. – Schrötter Š.: Numerické metódy, pravdepodobnosť amatematická štatistika, KM FEI TUKE, Košice (2006). ISBN: 80-8073-633-2
[4] Džurina J. – Grinčová A. – Pirč V.: Matematika 1, Elfa, Košice (2009)ISBN: 978-80-8086-115-5.
[5] Eliáš J. – Horváth J. – Kajan J.: Zbierka úloh z vyššej matematiky 1 (6.a neskoršie vydanie), Alfa, Bratislava (1985).
[6] Havel V. – Holenda J.: Lineární algebra (učebnica pre EF), SNTL, Praha(1984).
[7] Ružičková I. – Hlavička R.: Numerické metody, Ústav matematiky FSIVUT v Brně.
[8] Kaprálik P. – Tvarožek J.: Zbierka riešených príkladov a úloh z lineárnejalgebry a analytickej geometrie, Alfa, Bratislava (1987).
[9] Daňo I. – Ostertagová E.: Numerické metódy, pravdepodobnosť a mate-matická štatistika v príkladoch, Elfa, Košice (2007).
[10] Olejník F. – Mislivcová V.: Matematika 1, Elfa, Košice, (2006).
[11] Rektorys K.: Přehled užité matematiky I, Prometheus, Praha (2000).
[12] Rektorys K.: Přehled užité matematiky II, Prometheus, Praha (2000).
[13] Sedláková K.: Vektory a matice, RVS VLA, Košice, (1999).
[14] Sedláková K.: Lineárna algebra, RVS, VVLŠ, Košice (1994).
[15] Sedláková K.: Príklady z lineárnej algebry, RVS, VVLŠ, Košice (1995).
[16] Železník V.: Úvod do numerickej matematiky, RVS, VLA, Košice (1999).

.
Názov: NUMERICKÁ MATEMATIKA
Autor: c© RNDr. Štefan BEREŽNÝ, PhD., 2012
Recenzovali: prof. RNDr. Jozef DŽURINA, CSc.RNDr. Ján BUŠA, CSc.
Vydavateľ: Technická univerzita v KošiciachFakulta elektrotechniky a informatiky
Miesto vydania: KošiceRok vydania: 2012Vydanie: PrvéRozsah: 120 stránNáklad: 50 ks
ISBN: 978-80-553-1067-1