Embed Size (px)
Citation preview
Revista Mexicana de Física 31 No. 3 (1985) 465-487
BIFURCACION y CAOS ENSISTEMAS DINAMICOSDEL PLANO COMPLEJO
Xav;er Gómez Mont
Instituto de Matemát'icas, UNAM
México, 04510, n.F.
RESUMEN
congreso 465investigación
El objeto del presente trabajo es ilustrar el fenómeno de estabi-lidad estructural y de bifurcación para sistemas dinamicos, a través dela iteración de funciones racionales. Dados los avances recientes en lateoría y en el uso de métodos computacionales, se posee una imagen clarade la estabilidad estructural de estos sistemas. Ilustramos, en el casode funciones cuadráticas, el fenómeno de bifurcación para sistemas dinámicoso
ABSTRACf
We illustrate the problem of structural stability and bifurcation
466
for dynamical systems, through the process oE iteration oE rati0nalfunctions. Due to recent advances in the theory and in computationalmethods, a clear picture emerges oí the structural stability oE thesesystems. We illustrate through quadratic maps the intricate phenomenaoE bifurcation for dynamical systems.
1 • ¡NTKODUCC ION
Ins sistc~JS dinamicos son la parte de las matemáticas que tratasobre la dcscripci6n de fcn6menosque están evolucionando con el t ¡empa.Los primeros sistemas Jinfunicos con los que nos top<unosson las ecuacio-nes Jifcrcnciales ordinanas. Estas ecuaciones parten Je una dcscripc,i6ninfinitcsi!!lal del movimiento, especificando en cada PlUlto del espacio elvector velocidad del movimiento:
<Ixat = x f(x) lx £ E) (1)
El teorC~1 de existencIa y unicidad de las soluciones nos garantiza queexiste un movimiento completamente determinado por esta descripci6n infinitcsi~11 que podemos ver como una familia de transformaciones del espa-cio, Wt :E ...•.E, que nos especifica d6nde se cncuentran los puntos de Et-unidades de tiempo después.
Ln su pruncra ctapa de evoluci6n, los matemáticos trataban deencontrar soluciones a las ecuaciones diferencwles a tr<.avésde fWlcionesconocidas. Durante esta etapa, se resolvieron analíticamente muchas deestas ecuaciones, y se ganó W1<l intuic16n bastante buena del comportamie~to de lJS soluciones. Mas también, se enfrentaron al hecho de que la m.::l-
yor.ía de las ecuaciones no se pocHan resolver analíticamente.Fue Ilcnri Poincaré(1), a finales del siglo XIX, el que introdujo
la teoría cualitativa de ecuaciones diferenciales. El enfoque ya no eraresolver analíticamente las ecuaciones, sino rn.'Ísbien dar una dcscripci6ngeométrlco-topol6gica del retrato fase, es decir, las soluciones van tra-zando en el espacio donde est6n definidas una trayectoria al irse movien-do, y el conjunto de todas las trayectorias nos da una descomposici6n delespacio ambiente en la unibn disjunta de una infinIdad de curvas.Poincaré fue el primero q\£ trat6 de entender esta descomposición gcomé-
467
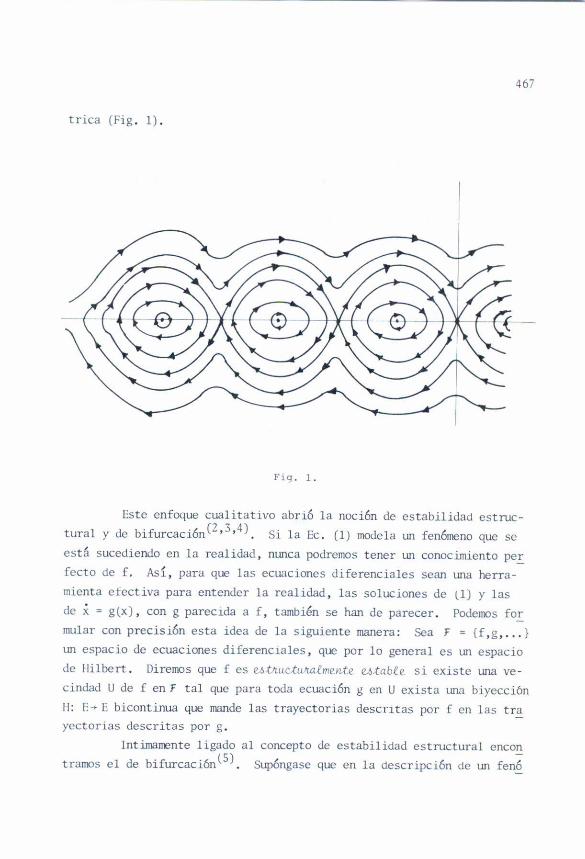
trica (fOig. 1).
Fig. 1.
Este enfoque cualitativo abri6 ]a noci6n de estabilidad estruc-tural y de bifurcaci6n(2.3.4). Si la Ec. (1) modela un fcn6mcnoque se
está sucediendo en la real idad J nLmca podremos tener tlll conocimiento pe..!'.recto de f. Así, para que las ect~ciones diferenciales sean una herra-mienta etectiva para entender la realidad, las soluciones de lI) y lasde x = g(x), con g parecida a f, tambi6n se han de parecer. Podemos farmular con precisi6n esta idea de la siguiente manera: Sea F = {f,g •••• }un espacio de ecuaciones difercnc~ales. que por lo general es un espaciode Hilbcrt. Diremos que f es uvwuu'tafme.nte u,-tabie si existe una ve-cindad U de f en F tal que para toda ecuaci6n g en U exista W41 biyecci6n11: E..•.E bicontinua que mande las trayectorias descntas por f en las traycctorias descritas por g.
Intimamcnte ligado al concepto de estabilidad estructural cncontramos el de bifurcaci6n(S). Sup6ngase que en la descripci6n de un fenó
468
meno tenemos lID parámetro k que podemos variar contintlaIrenteentre O y 1,Y para cada valor de k el fen6meno queda descrIto por una ecuaci6n f enF, y que tanto fo como £1 son estructuralmente estables; más fo Y £1 noson equivalentes, en el sentIdo de que sus 6rbitas tienen comportamientosdistintos. Para valores pequeños de k, fo Y fk si son equivalentes y porconsiguiente ha de haber un primer valor ko para el cual fo Y fko ya nosean equivalentes. Este ptmto ko se denomm3 un punto de b,¿6UJlc.ac..Wl1.
En otras palabras, en el espacio F de ecuaciones diferencialeshay ciertos conjuntos abiertos Vi donde todas las ecuaciones en cada Vison equivalentes. Los puntos de blfurcacibn son los puntos que se encucntran en la frontera de cada uno de estos conjuntos abiertos.
se puede decir que a pesar de lo efectivo que han sido las ecuaciones diferenciales para modelar la realidad, no tenemos una Idea claradel fenbmeno de estabilidad estructural y de bifurcaci6n para un sistemade ecuaciones parametrizadas por f. El objeto del presente trabajo esreportar sobre avances recientes en este problema para una clase de sistemas dinAffiicos,que pueden servir para ilustrar el patr6n general y quemuestran que el cuadro resultante es más interesante de lo que podría unoimaginar a primera vista. El esbozo de esta clase particular de sistemases interesante dado que:
l. Es el primer caso no trivial donde se tIene una descrlpci6n más o me-nos completa
2. Cualquier fen6meno observado en sistemas dinámicos ya aparece en estaclase de sistemas
3. Las computadoras han hecho posible graflcar muchos de estos SIstemasy observar c6mo varían al modificar las ecuaciones que los definen
4. se cuenta con la herrarnaenta de la teoría clásica de funciones de va-riable compleja, que es una de las teorías más perfeccionadas de lasIll3ternfiticas
11. LA D1NMIlCA DE LOS ~1APEOSRACIONALES
Obtenemos otra clase de sistemas dinimicos al considerar c6moevoluciona un sistema,no con respecto a todo tiempo sino únicamente c6mo
469
evoluciona en una clerta unidad de tiempo, dando origen a una transforma-ci6n del espacio: T;E-+E. El sistema evoluciona en TI l.Uudades de tiempoal aplicar TI veces la transformación T: Tn = To"'oT:E-+-E. Las 6rbitasdel sistema dinámico generado por T, (Tn(P)}' son ahora de dimensi6n ceroy estamos interesados por una descripci6n topo16gico-geométrica de estadescomposici6n(6).
Empezaremos dando una definici6n algebraica de los sistemas quevamos a analizar, que tiene la ventaja de que presenta a 10$ sistemas p~rametrizados de una manera natural.
Definición algehraica:forma
Una 6unu6n lW.uonal es t.ma expresi6n de la
R(z)b¡nZm +
+ ao+ b o
Polinomio en zPolinomio en z
(2)
donde las constantes 3i, bí son números complejos arbitrarios. La p.xpre-5i6n algebraica R(z) da origen a una transformaci6n
R: [~[
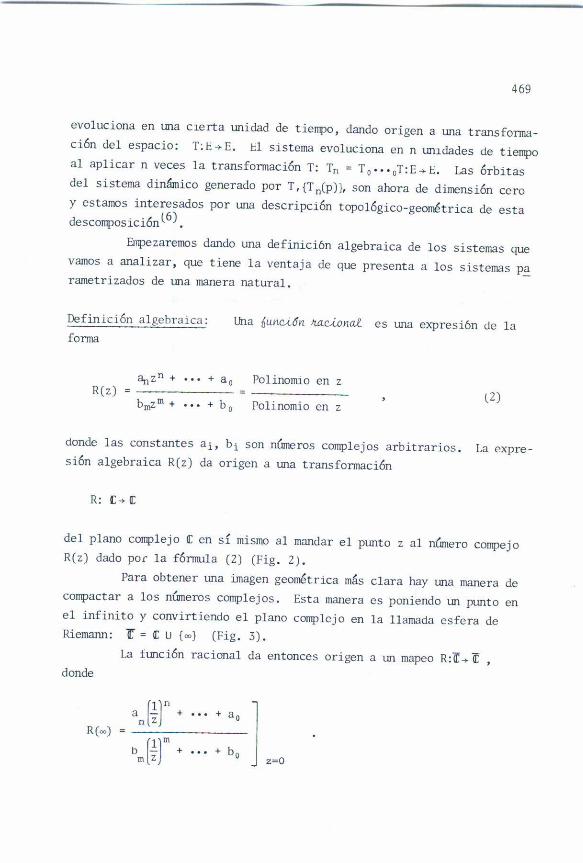
del plano complejo [ en sí mismo al mandar el punto z al número compejoR(z) dado por la f6rmula (2) (Fig. 2).
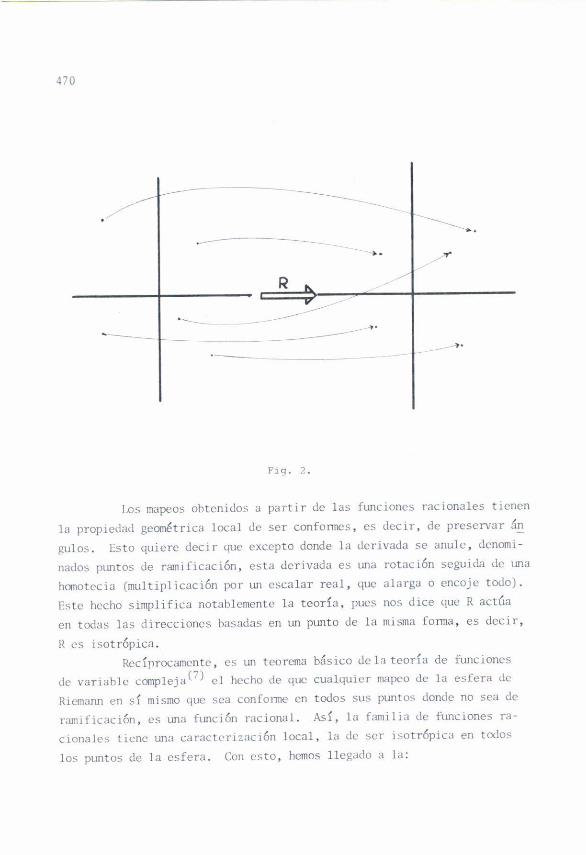
Para obtener una ~agen geométrica más clara hay una manera decompactar a los números complejos. Esta manera es poniendo un punto enel infinito y convirtiendo el plano complejo en la llamada esfera deRiernann: ~ = [ U {oo} (Fig. 3).
La ftmci6n racional da entonces origen a un mapeo R:[-+ ["donde
an[W + ••• + ao LR(oo)
bm[W + ••• + bo
470
.---- ------------- ..-..
R
--- "---- -"-------'-
Fiq. 2.
Los mapcos ohtenidos <.lpartir de las flmciones racionales tienen
la propiedad geométrica local de ser confonnes, es decir, de preservar á~guloso [sto quiere decir que excepto donde la derivada se anule, denomi-nados plmtas de ramificación, esta derivada es tma rotación seguida de una
hcmotccia (multiplicación por Wl escalar real, que alarga o encoje todo).
Este hecho simplifica notJblcrncntc la teoría, pues nos dice que R actúa
en todas las direcciones basadas en un ptmto tic 1<.1misma forma, es decir,
R 0S isotr6pica.Recíprocamente, es Wl teorema básico de 1.1teoría de funciones
de variable cOOIpleja(7) el hecho de que cualquier mapco uc la esfera deRicmarm en sí mismo que sea confonnc en tooos sus puntos donde no sea de
r:unificación, es lUla flUlci6n racional. Así, la familia dc funciones ra-
cionales tiene una caracterización local, la dc ser isotr6pica en todos
los puntos de la esfera. Con esto, hemos llegado a la:
471
ce
/ \
/ \/ \
/ \/ \
/ \/ \
/ \-- - --_.--- ----------"'<--- - ..\\
Fig. 3.
Definición gC00l6trica. Un t71apeo J!.auona.t es una transformación continuade la esfera de Riemann en sí misma,
R: ii' ~ ii'
que es isotr6pica (o confmmc) en todo a: menos en un n(nncro finito de p~tos, los plU1tas de rarnificacj6n dc R.
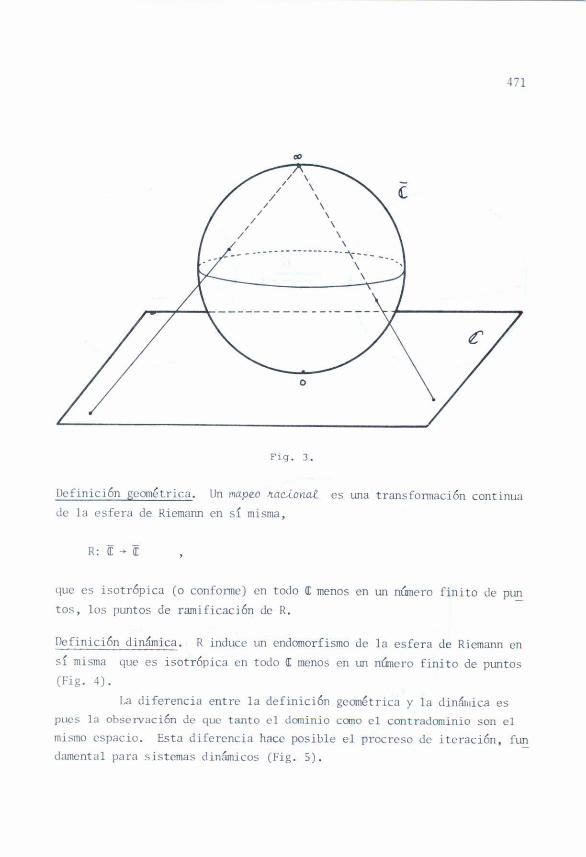
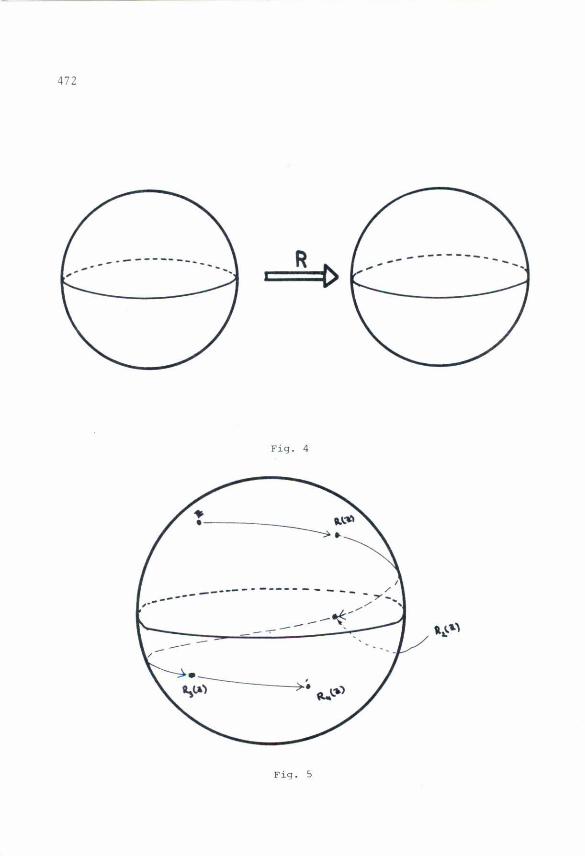
Definici6n dinámica. R induce un cndomorfismo de la esfera de Riemann ensí mbll1<l que es igotr6pica en todo «: menos en un número fini to de PtUltos(Fig. 4).
La diferencia entre la definición geométrica y la dinrullica espues 1.1 observación de que tanto el dominio cano el contrauominio son el
mismo espacio. Esta diferencia hace posible el procrcso de iteraci6n, fun
d~uncntal para sistemas dinfunicos (Fig. 5).
472
Fig. 4
------- -----,.-
Fig. 5
473
Si R se escribe como en (2), el grado de R, d, es el máximo delos enteros TI y ffi. Este grado también se puede definir geométricamentecomo el número de veces que envuelve R a la esfera de Riemann sobre símisma, dado q.1C por el teorema fundamental del álgebra R-1(c) es igual a
las raíces del polinomio
(a zn + ~ •• + 30) - c(b zm + ••• + bol On m
que es d siempre, si sabemos contar multiplicidades y tomamos en cuentael punto al infinito. A~í cada punto del contradominio queda cubierto dveces. Los mapeos racionales de grado d quedan pues par~unctrizados por(ao. ' •• , a. bo, ••• , b )e:a:2d+-2, con la condici6n de que a f O 6
d d db f O. Quedan paramctrizados de manera natural por Rae , que es un abierd dto de [2d + 2 Diremos que una funci6n racional es cercana a otra si suscoeficientes están cercanos. Esta ~tefinici6n es equivalente a decir quela diferencia entre los dos mapeos es pequeña, es decir, la distancia(R(z), S(z)) < £ para todo punto z £ ir.
Dcfinici6n: Decimos que la funci6n racional R de grado d es e6tnuctukal-mente e6tabie si existe una vecindad U de R en Racd tal que toda S en Usea topol6gicamentc equivalente a Ri es decir, que exista para cada S enU un mapco biyectivo h, continuo y de inverso continuo tal quehoRoh-1=S
Hay varias preguntas relevantes que ya podemos hacemos:A. Dcscripei6n de la dinámica de R:
1) ¿Cuál es el canportamiento de ~(zo) cuando n tiende a más o me-nos infinito?
2) ¿c6mo depende este comportamiento de la condici6n inicial zo?
B. DependencIa de parámetros:1) ¿c6mo depende este comportamiento de los parámetros
ao, •••• bm en (1)?
2) Analizar el fen6mcnode estabilidad estructural.

474
111. IDS ~~\PEOS RACIONALES CUNJRATlCOS
En esta secci6n analizaremos los mapcos de grado 2, 3, S, 6.Empecemos con la ÍLmci6n R(z} = Z2. Recordemos que al multiplicar dosnúmeros complejos, el valor absoluto del resultado es el producto de lo~valores absolutos de los multiplicandos, y que el ángulo que hace el re-sultado con el eje real es la suma de los ángulos de los factores. Así.el valor absoluto de 22 es Iz21 = Izl2 yargtuTlcnto (Z2) = 2 argunento (z).Oe esta simple observaci6n tenemos:
Z2n y tendremos quelo Si Iz 1 < 1, iterar n veces R da Rn1 ¡ro Rn(z) = O.n-
2. Si 1z 1 > 1 tendremos que lim Rn(z)n~~
3. Si Iz 1 1, Y si arg(z)2TIm
= con ro1m punto pcri6Jico. 2n
= oo.
impar, entonces Rn(z) z y z es
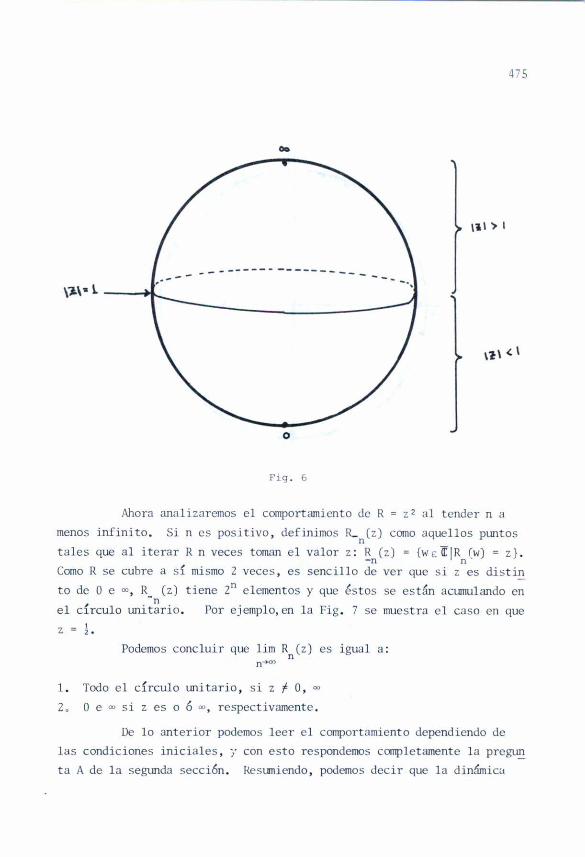
4. Si Iz! = 1 Y el argumento no tiene la forma de (3) entonces z no espcri6dico, y se puede probar que de hecho la 6rhita positiva de z esdensa en el circulo uni tario (Fig. 6).
Observemos clanunente lUla dicotomía.
1. Parn los puntos donde Izll- 1. tenemos un canporté.uniento sencillo,uado qLC hay dos ptmtos atractores, O e ce, caun uno con su rcgi6n deatracción, los dos hemisferios.
2. En la frontera entre las dos regiones, el círculo lll1itario SI. la f~ci6n lo manda en sí mismo, R: SI -+ SI cubriéndolo dos veces. Si sacamas la derivada R' (z) = 2z y IR' (z) 1 = 21z1 = 2, asi que R siempre
está exp~ndiendo infinitesimalmente a lo largo de SI homogéneamentepor un factor de 2.
Nos referi remos al primer conjunto cano el domúuo de eqtÚcont-{ntÚda.d de I~Jz) = Z2 Y queda Matemáticamente definido porER = {ZE:[ 1] vccinunu Vz• {R IV} es "precanp3ctalt}, y al complemento lollé.unarcmosel c.onJw1to Umite o conJunto de. Juüa de R(z), JR•
475
\~ I ') 1
--.-- - - - ------ ------- -- ---',
o
Fig. 6
11\ < \
Ahora analizaremos el comportamiento de R ::: Z2 al tender n amenos infinito. Si n es positivo, definimos R_ (z) como aquellos puntos
ntales que al iterar R n veces tom,m el valor z: R (z) = {wE[IR (w) = zJ.-n nComo R se cubre a sí mismo 2 veces, es sencillo de ver que si z es disti~to de O e 00, R_ (z) tiene Zn elementos y que éstos se csttin acumulando en
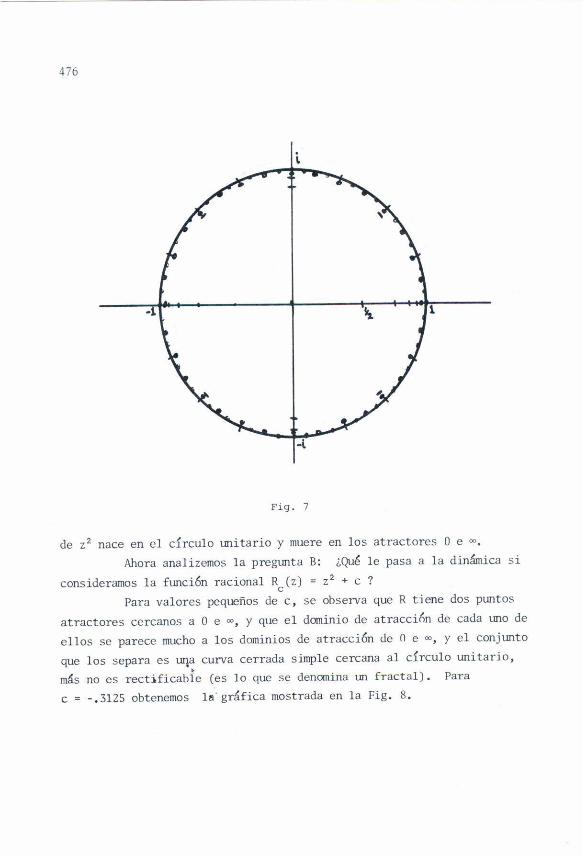
nel círculo llilitario. Por cjcmpl0,cn la Fig. 7 se mUestra el caso en quez = L
Podemos concluir que lim R (z) es igual a:n
n~
1. Todo el círculo unitario, si Z f O,20 O e 00 si z es o 6 00, respectivamente.
De lo anterior podemos leer el comportamiento dependiendo delas condiciones iniciales, j' con esto respondemos canplctamentc la prcgu!!ta A de la segunda sccci6n. Rcsunicndo, podemos decir que la din~ica
476
-l
Fig. 7
de Z2 nace en el círculo unitario y muere en los atr3ctores O e oo.
Ahora analizemos la pregunta B: ¿Qu~ le pasa a la dinámica siconsideramos la funci6n racional R (z) = Z2 + e ?e
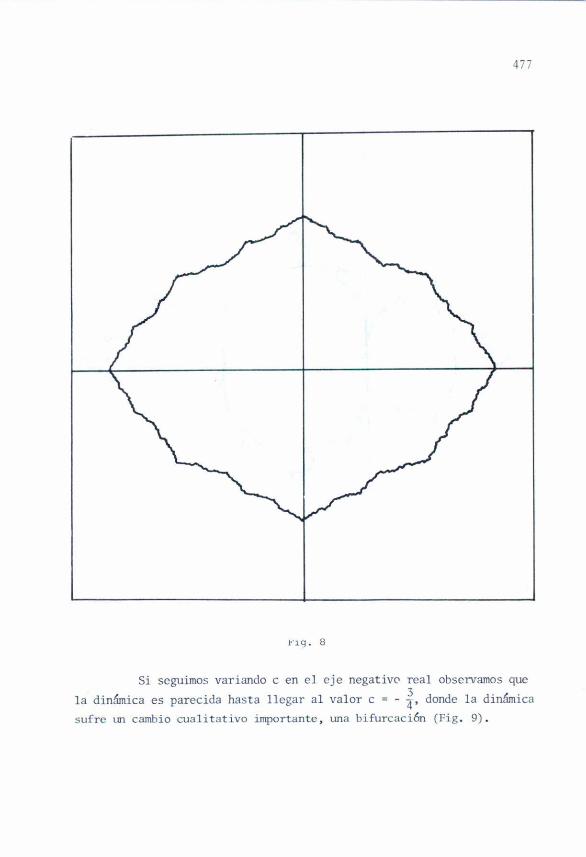
Para valores pequeños de c, se observa que R tiene dos puntosatractores cercanos a O e 00, y que el dominio de atracción de cada uno deellos se parece mucho a los dominios de atracci6n de n e 00, y el conjuntoque los separa es uq~ curva cerrada simple cercana al círculo unitario,más no es rectificable (es lo que se denomina un fractal). Parae = -.3125 obtenemos lB" gráfica mostrada en la Fig. 8.
477
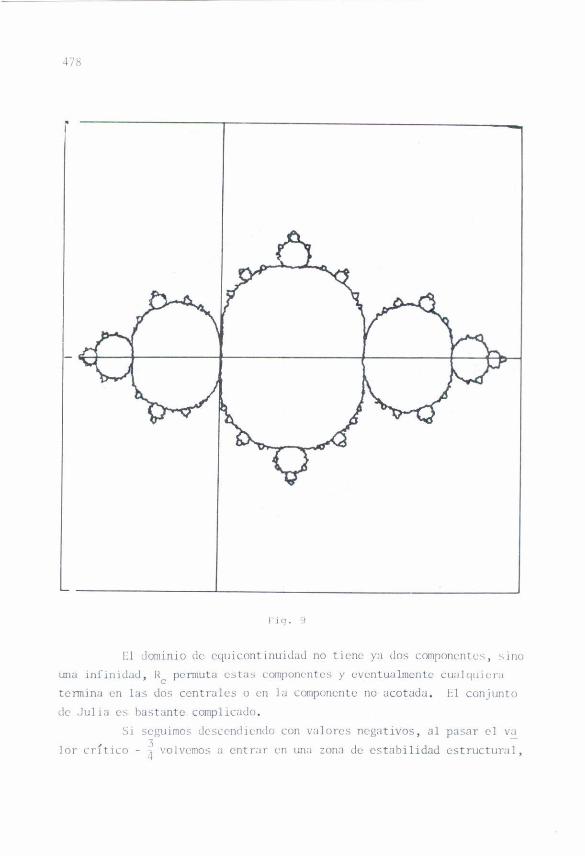
Si seguimos variando e en el eje negativo real observamos quela dinámica es parecida hasta llegar al valor e = - 1. donde la dinámicasufre t~ cambio cualitativo importante, una bifurcaci6n (Fig. 9).
i
¡'ir¡. 'J
1:1 domjnio dc' cquicontinuidad no tiene ya dos cornrOnl'fltcs, sino
LUl<..lin!"illidaJ, He pennuta estas componentes y eventualmente cU;llquic'.;1
tcnnjn;¡ en las dos centrales o en la cornpom:ntc no acotada. El conjunto
dc .Jul j;¡ ('s bustantc compl ¡caJo.
Sj seguimos dcscr'nd i<:ndo con v:l1orcs negativos, al pastlr el \!.::101' CrÍtiL'O - ~ volvemos;¡ cntr:lf <.'111m:! Z0I1:1 dc estabilidad estructural,
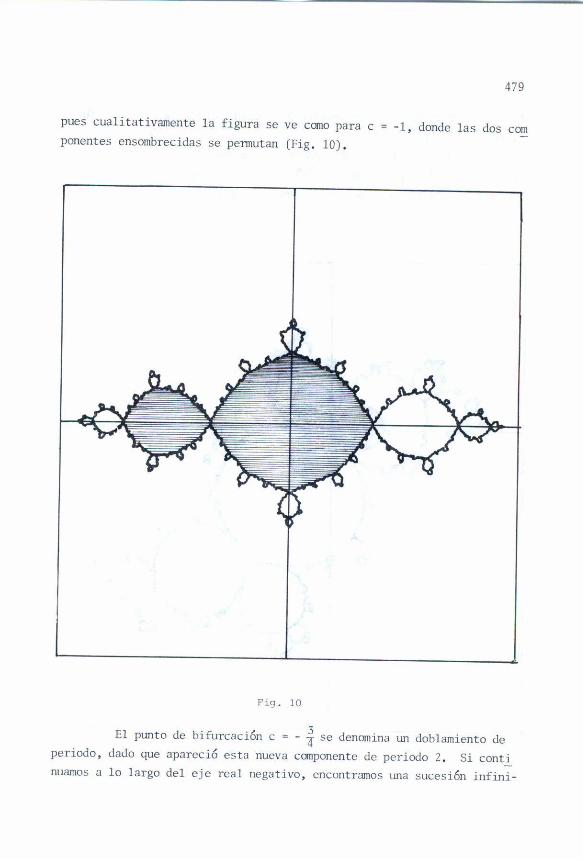
pues cualitativamente la figura se ve como para eponentes ensombrecidas se permutan (Fig. 10).
479
-1, donde las uos com
Fig. 10
El punto de bifurcaci6n e : - ~ se denomina un dohlamiento deperiodo, dado que apareci6 esta nueva ccmponente de periodo 2. Si contimIamos a 10 largo del eje real negativo, encontramos una sucesi6n infini-
480
ta de bifurcaciones con doblamiento de periodos, las denominadas bifurcacienes de Feigenbaum.
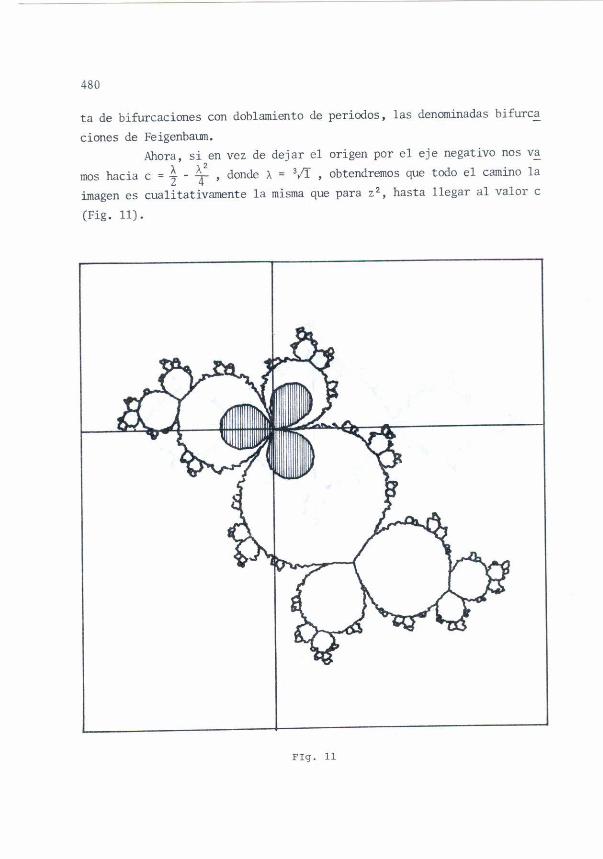
Ahora, si en vez de dejar el origen por el eje negativo nos vaIDOS hacia e = % - ~2 , donde A = 31I , obtendremos que todo el camino laimagen es cualitativamente la misma que para Z2, hasta llegar al valor e(Fig. 11).
FIg. 11
481
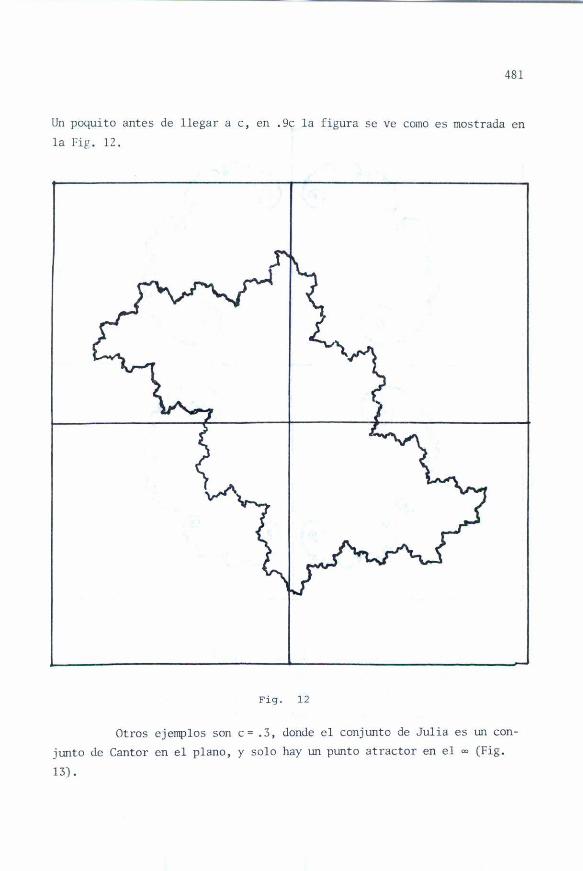
Un poquito antes de llegar a c, en .9c la figura se ve como es mostrada enla Fig. 12.
Fig. 12
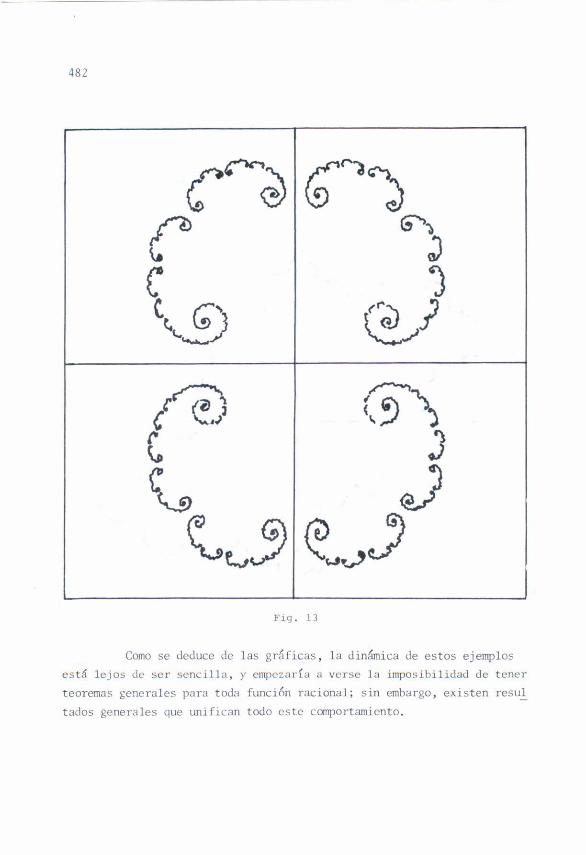
Otros ejemplos son c= .3, donde el conjunto de Julia es un con-junto de Cantor en el plano, y solo hay un punto atractOT en el 00 (Fig.13) •
482
c~~,~)~r G"'»
J\.ee ')(t, c;'} ("v jJ
c...'"""- .••• ~/
,~"I (~e ......i(" ')
'".;
C'~ J~tJ'~~.~jI
Fig. 13
Comose deduce de las gr(¡fiGJs, la dinfunica de estos ejemplosestá lejos oe ser sencilla, y empezaría a verse la imposihilldau de tener
teoremas generales para toda función racional; sin embargo, existen rcsul
tados generales que uní rican tOLlo este comportamiento.
483
r v . LA TEOR¡A CL~H{¡\L
La teoría genera! de ffi<.lPCOSracionales fue empezad;] en 1918 con
los tr;¡hajos de los matcID<Íticos franceses Fatou(8) y Julia(9), y ha reci-
bido 1m nuevo iPlrU1so(lO,ll,12,13). F.l primer rcsultauo estructural es:
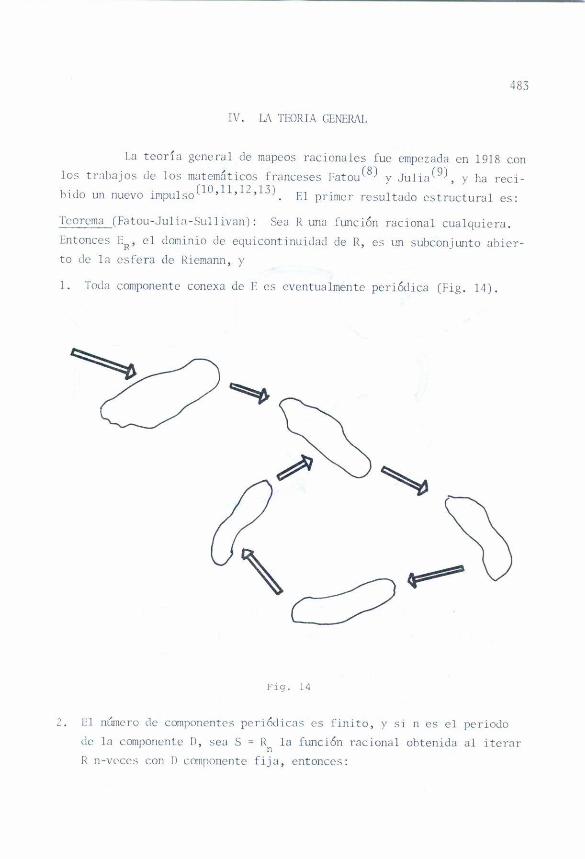
Teorema (Fatou-.1uli:1-Sullivan): Sea R illla fW1Ción racional cualquicru.
Entonces ER, el dominio oc cquicontinuiLbd de R, es un suhconjlU1to abier-
to de la esfcra de Ricmann, y
]. To<J<lcomponente conexa de [ es eventualmente periódica (Fig. 14).
Fig. 14
2. El ntlmcro de componentes pcrjéx.licas es finito, y si n es el periodo
de la componente [J, sea S = R la [¡meión raciOlwl obtenida al iterarn
R Il-Vl'CCS con D componente fija, entonces:
484
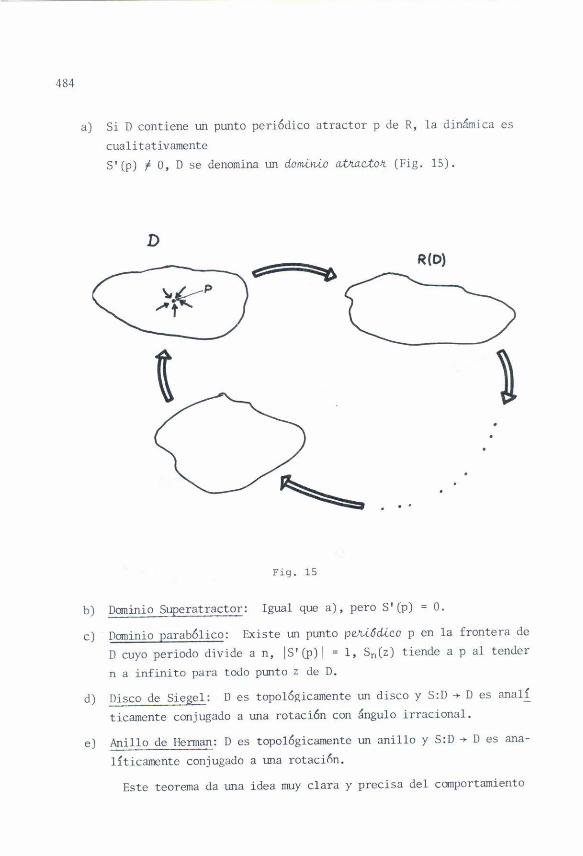
a) Si D contiene un punto peri6dico atractor p de RJ la din~mica escualitativamenteS' (p) f O, O se denomina un dominio atnacto~ (Fig. 15).
DR(D)
c_~~
..
Fig. 15
b) Dominio Superatractor: Igual que a), pero S' (p) = O.e) Dominio parab61ico: Existe un punto p~~6dicop en la frontera de
O cuyo periodo divide a n, IS'(p) I = 1, Sn(z) tiende a p al tendern a infinito para todo punto z de D.
d) Disco de Siegel: O es topo16gicamente un disco y S:D ~ D es analíticamente conjugado a una rotaci6n con ángulo irracional.
e) Anillo de Herrnan: O es topo16gicamente un anillo y S:D -+ D es ana-
l!ticamente conjugado a una rotacinn.Este teorema da una idea muy clara y precisa del comportamiento
-l85
dinámico en el dominio de discontinuidad. Afirma que a final de cuentastoda la acci6n se lleva a cabo en un número fini to de componentes donde ladinámica es bien conocida.
Del conjunto de Julia se conoce(l4):
1) R: JR -+JR es topo16gicamente transitivo, es decir, para cualquierpunto z de J la 6rbita positiva y negativa de z es denso en JR
2) El conjunto de puntos peri6dicos repulsores, Rn(z) = Z y IR'n(z) I >1,es denso en J R
3) J es no vacío y no tiene puntos aislados
4) Decimos que RIJ es hipcrb61ico si existe un entero N tal queR
IR'N(Z) I >1 para toda z en JRo Si es así, entonces:a) RIJ es J-establcJ es decir, todo mapco racional cercano a R tie-
ne úha dinámica conjugada a RIJR al restringirlo a su conjunto deJulia.
b) Existe una medida invariante en JR con la cual- 1el sentido de que si A = R (A) JR, entonces
O o total. Adem5s, podemos representar a RIJRca simb6lica.
R es erg6dico enla medida de A esa trav6s de dinámi
V. PROP1EDADES GENERlCAS OE ~IAPEOS ESTRUCl1JRAI.MF,\TE ESTABLES
El siguiente teorema debido a ~lañé, Sad. Sullivan y Thurston(1O.12)
nos da la estabilidad estructural de los mapcos estructuralmente estables:Te.o!t.ema: El conjtmto de mapeos racionales estructuralmente estables enRacd es abierto y denso.
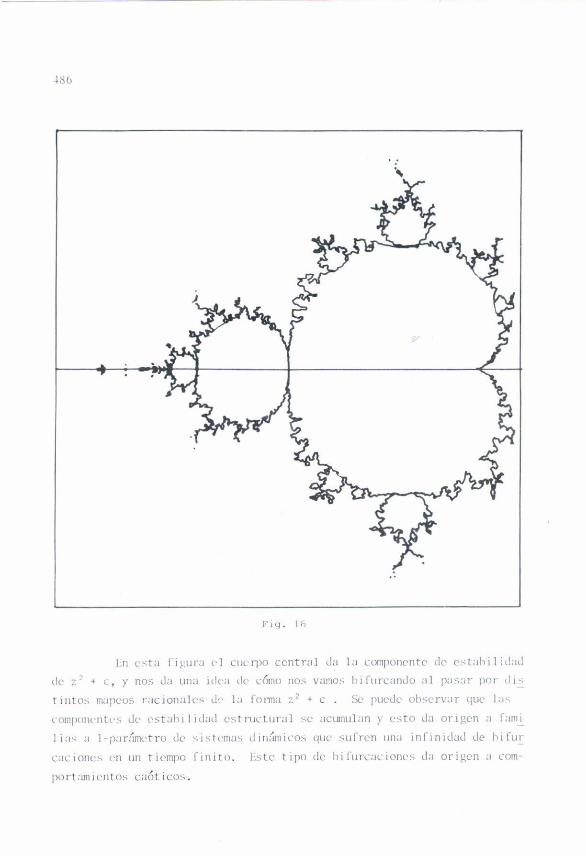
No es difícil ver que toda funci6n racional de grado 2, despuésde tul cambio holomorfo de coordenadas en todo "[ se puede escribir en laforma z + C para tma constante c. Si pintamos en el plano complejo ([ aqu~1105 puntos que representan funciones estructuralmente estables obtenemosun conjunto abierto y denso. El conjunto de ~mndelbrot(15) consiste enpintar todo el plano menos la componente no acotada de los estructuralme~te estables (Fig. 16).
••••
Fiq. 1G
Ln esta fir,ura vi (\1(''1)0 central J,l la compollente de cst;lhi 1 ¡d:ld
de z] + 1.:, Y nos da un;l ¡tlt';! de t:6r,¡o nos V¡Il'!IOS hifurc:mdo :11 p;Js:lr por dí.:
t illtos mapeas racionalc:-; J" 1;1 fOlma :2 + c. S<. puede OhSl'r\':lr que las
("ompolI{'lltt'S tlt' est;lhi I itl:ld ('st nKtural <.;c aClonu!;m y esto da origcn :1 fami
Ji:I";1 l-p:lr;í.mt'tro dc "isft'mns din;Ímicos qlK' sufren IJlla infiniuaJ Je hjrll~
c;h:iolll'S en un ticmr>o finito. I:"t(' tipo de hifun ...-;ICiorlcs d;l origen;¡ com-
p{)rt:ullil'/llOS caóticos.
487
Para concluir, podemos decir que tenemos un cuadro bastante pr~ciso de las preguntas A y B de la segunda sccci6n. Este cuadro deja muchode ser trivial y es un buen lugar para probar y enunciar conjeturas sobreel comportamiento general de los sistemas dinrunicos.
Tambi~n cabe mencionar que estas investigaciones se están apli-cando a la teoría de algoritmos(16), a través del método de Ncwton.
REFERENCIAS
I.2.3.4.5.6.7.8.9.
10.11.
12.13.14.15.
16.
17.
lE.
H. POincaré, Le¿ Methodeó Nouvelte¿ de fa M€eanique C€fe¿te, Paris, 1892-99A. Andronov, L. Pontrjagin, "Comptes Rendus" (Doklady), Me. Se. USSR,Vol. 14, 1937.M. Peixoto, S:tJwctw<.a.tstab-i-ü:ty on Two V-imCI1M.{)I1a£Mani60fiU,Topofogy 1, 1962, pp. 101-120.S. Smale,"Differentiable Dynamical Systems'~ Bull. 06 A.M.S.,No. 73, 1967.J. Sotomayor.lIGeneric one Parameter Families of Vector Fields on TwoDimensional flanifolds",Publo ¡HES, No. 43, 1973.Z. Nitecki, V-i-66~ent-i.abfe Vynam<C6, MIT Press, 1971.L. Ahlfors, Compfex AI1~-i.ó, McGraw-Hill, 1979.P. Fatou, Sun fe¿ equat-Con6 60net-i.onelte¿, Bull. Soe. Math. F~al1ce11 (1919), 161-271; 48 (1920) 33-94, 208-314.G. Julia, MemoiJtc. &M t'i;tvw..tA..on du fUl1cUo/1..6 Jtat.ionneliu. J.Math. Vol. 8, (1918) pp. 47-245.R. Mañé, P. Sad, D. Sullivan, On the Dynamics of Rational Maps (Preprint).D. Sullivan. Quasiconformal Homeomorphisms and Dynamics 1, 11, 111,(Preprint).D. Sullivan, W. Thurston, Extending Holomorphic Motions, (Preprint).W. Thurston, LectuAeA NoteA, CBMS Con6., Univ. of Minnesota.H. 8rolin, Invariant Sets under Iteration of Rational Functions.A~k. Mat., Vol. 6, (1966) pp. 103-144.P. Blanchard. Complex Analytic Dynamics on the Riemann Sphere,Bulfet-i.n 06 the A.M.S., 11 (1984) pp. 85-141.S. Smale, The Fundamental Theorem of Algebra and Complexity Theory,Bu.tf. 06 A.M.S.,1981, pp. 1-36.A. Dovady, Systems Dynamics Holomorphes. Sem;naire Bourbaki. 1982/83,No. 599.A. Dovady, J. Hubbard, Iteration des polyrlumes quadratiques complexes,C.R. Aead. Se-<-. P~, 294 (1982) pp. 123-126.





























