Embed Size (px)
Citation preview
ISSN 2080-167X
BIULETYN
INFORMACYJNY
Polskiego Towarzystwa
Elektrotechniki Teoretycznej
i Stosowanej
Oddział Gdańsk
Gdańsk 2016
30
BIULETYN
INFORMACYJNY
Polskiego Towarzystwa
Elektrotechniki Teoretycznej
i Stosowanej
Oddział Gdańsk
Nr 30
Gdańsk, kwiecień 2016

Biuletyn Informacyjny
Polskiego Towarzystwa Elektrotechniki Teoretycznej i Stosowanej
Oddział Gdańsk
Nr 30 – kwiecień 2016
Materiały zebrał i biuletyn opracował:
Ludwik Referowski
Wydział Elektrotechniki i Automatyki PG
80-952 Gdańsk, ul. Narutowicza 11/12,
tel: 501 678 006
Copyright © by Ludwik Referowski
tel: +48 501 678 006
Wydawca: Polskie Towarzystwo Elektrotechniki Teoretyczne i Stosowanej
Oddział Gdańsk
ul. Gabriela Narutowicza 11/12 80-233 Gdańsk
e-mail: [email protected]
Drukarnia: b3project
ul. Jana Sobieskiego 14, 80-216 Gdańsk
Nakład 150 egzemplarz

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 5
Spis treści
Spis treści ………………………………………………………………….. 5
I. Uchwała Zarządu Głównego PTETiS ……………………………..……… 7
II. Wspomnienie o Profesorze Władysławie Latku …………………………. 7
III. XXVI Cykl Seminaryjny
„Zastosowanie Komputerów w Nauce i Technice’2016” ………………… 11
Harmonogram odczytów …………………..………………………..…… 11
Autorzy referatów …………………………….………………...… ...…. 15
Streszczenie referatów …………………………………………………… 17
IV. Wyniki konkursu „Najlepszy referat w cyklu seminaryjnym
Zastosowanie Komputerów w Nauce i Technice 2014” ………….….…. 43
V. Konferencje i sympozja w roku 2015 …….………..………………….… 45
VI. Wydawnictwa Oddziału Gdańskiego w roku 2015 …………………..…. 45
VII. Cykliczne konferencje naukowe organizowane
i współorganizowane przez PTETiS …………………………………… 47
VIII. Konferencje i sympozja w roku 2016 …….………..………………….… 49
IX. Konferencje naukowe organizowane i współorganizowane
przez PTETiS w roku 2016 ………………………………..……………. 51
X. Zeszyty Naukowe WEiA PG w Internecie ………………………………. 53
XI. Zaproszenie do udziału w XXV cyklu seminaryjnym
„Zastosowanie Komputerów w Nauce i Technice 2017” ……………….. 53

6 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 7
2016 – Rokiem Profesora
Władysława Latka
1916 - 2016
I. UCHWAŁA ZARZĄDU GŁÓWNEGO PTETiS
Wobec nadchodzącej w 2016 roku setnej rocznicy urodzin profesora Władysława Latka,
na plenarnym zebraniu Zarządu Głównego Polskiego Towarzystwa Elektrotechniki Teoretycznej
i Stosowanej z dnia 28 września 2015 roku, podjęto jednomyślnie uchwałę o następującej treści:
"Polskie Towarzystwo Elektrotechniki Teoretycznej i Stosowanej proklamuje rok 2016
Rokiem Władysława Latka w 100. rocznicę Jego urodzin"
Zadanie to będzie koordynowane przez
przewodniczącego PTETiS prof. K. Kluszczyńskiego
Władysław Latek 1916 - 1991
II. WSPOMNIENIE O WŁADYSŁAWIE LATKU
Władysław Latek urodził się w 1916 roku w Skromowicach (powiat Lubartów) i ukończył
Państwowe Gimnazjum Męskie im. Tadeusza Kościuszki w Łukowie. W 1934 roku podjął studia na
Wydziale Elektrycznym Politechniki Warszawskiej uzyskując absolutorium w r. 1939. Podczas studiów
był działaczem Stronnictwa Ludowego oraz Akademickiego Koła „Wici”.
Z chwilą wybuchu wojny powrócił do rodzinnych Skromowic, gdzie był świadkiem ostatniej bitwy
września. Zadecydowała ona o jego postanowieniu walki konspiracyjnej, do której przystąpił w 1940 r.
w szeregach Batalionów Chłopskich. Działając w organizacji zbrojnej pod pseudonimem „Młot”,
doszedł do stanowiska zastępcy komendanta BCh na okręg lubartowski. Uczestniczył w scalaniu
oddziałów BCh z AK a od roku 1943 był delegatem rządu londyńskiego na powiat lubartowski
Po zakończeniu wojny złożył egzamin dyplomowy w Politechnice Warszawskiej i rozpoczął pracę
zawodową w Lubelskim Międzykomunalnym Związku Elektryfikacyjnym LUBZEL,
w charakterze kierownika stacji prób i warsztatu remontowego maszyn elektrycznych
i transformatorów.
W latach 1946-47 w firmie „Elektrobot” zajmował się projektowaniem i budową maszyn
indukcyjnych. W latach 1949-50 projektuje i nadzoruje montaż dużych układów napędowych.
Z dniem 1 kwietnia 1948 r. rozpoczął pracę naukowo-dydaktyczną w Katedrze Maszyn
Elektrycznych Politechniki Warszawskiej w charakterze starszego asystenta. Pracę tę kontynuował do
ostatnich chwil swego życia, przechodząc wszystkie szczeble kariery naukowej.
W roku 1951 uzyskał stopień naukowy doktora nauk technicznych w Wydziale Elektrycznym
Politechniki Warszawskiej za dysertację pt. Określenie wielkości charakterystycznych
synchronizowanego silnika indukcyjnego na podstawie danych biegu jałowego i danych znamionowych.
8 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
W roku 1955 został mianowany docentem etatowym, w roku 1961 – profesorem nadzwyczajnym, a
w roku 1971 – profesorem zwyczajnym.
Wykładał przedmioty: maszyny elektryczne, teoria maszyn elektrycznych, stany nieustalone w
maszynach elektrycznych, turbogeneratory. Każdorazowo był autorem programów tych wykładów oraz
autorem podręczników i skryptów, z których do dnia dzisiejszego korzystają kolejne roczniki studentów.
Prof. Władysław Latek był twórcą ośrodka badawczego, zajmującego się zjawiskami w silnikach i
prądnicach dużych mocy, a zwłaszcza w turbogeneratorach. Był inicjatorem, autorem lub współautorem
wielu prac naukowych referowanych ma konferencjach krajowych i zagranicznych oraz publikowanych
w czasopismach naukowych.
Bardzo duże zasługi położył profesor Władysław Latek w zakresie kształcenia młodej kadry
naukowej. Profesor wypromował ponad 20 doktorów, recenzował ponad 70 rozpraw doktorskich i ponad
20 prac habilitacyjnych. Wielu byłych wychowanków profesora zajmuje dzisiaj stanowiska profesorskie
oraz wypełnia odpowiedzialne zadania w przemyśle, energetyce i administracji gospodarczej.
W Politechnice Warszawskiej prof. Władysław Latek pełnił liczne funkcje kierownicze. Od roku
1956 przez trzy kadencje był prodziekanem Wydziału Elektrycznego, a w1971 został dziekanem tego
Wydziału. Od roku 1962 był kierownikiem Zakładu Maszyn Elektrycznych Dużych Mocy w Katedrze
Maszyn Elektrycznych, a po zmianie struktury Politechniki – kierownikiem Zakładu Maszyn
Elektrycznych w Instytucie Maszyn Elektrycznych. W latach 1976-1984 pełnił funkcję dyrektora tego
Instytutu. Pracę naukową w Politechnice Warszawskiej powiązał ściśle z potrzebami przemysłu i
energetyki. Od roku 1950 był samodzielnym pracownikiem naukowym, a następnie przez wiele lat
konsultantem prac badawczych w Instytucie Elektrotechniki. W tym czasie pod Jego kierownictwem
wykonana była ogromna liczba prac, niejednokrotnie o charakterze unikatowym, dla klientów spoza
uczelni. Dochodzono przyczyn awarii i naprawiano układy elektromaszynowe w zakładach
przemysłowych, elektrowniach, cukrowniach, mleczarniach, szpitalach, lotniskach wojskowych, i
fabrykach przemysłu zbrojeniowego.
W pracach badawczych najwięcej uwagi poświecił profesor Latek turbogeneratorom. Był
długoletnim konsultantem w pracowni turbogeneratorów w Instytucie Energetyki. Współpracował
również z Zakładami DOLMEL we Wrocławiu w zakresie konstrukcji turbogeneratorów oraz z
wieloma elektrowniami w zakresie eksploatacji tych maszyn.
Niespożyta energia i talent organizacyjny Profesora skłaniały Go do podejmowania wielu
owocnych działań w życiu zawodowym, w organizacji nauki i dydaktyki oraz pracy stowarzyszeniowej.
Był członkiem Prezydium Komitetu Elektrotechniki PAN oraz długoletnim przewodniczącym Sekcji
Maszyn Elektrycznych i Transformatorów tego Komitetu. Członek rad naukowych Instytutu
Elektrotechnik, BOBRE KOMEL w Katowicach, Instytutu Układów Elektromaszynowych Politechniki
Wrocławskiej. Członek Komitetu Nagród Państwowych, długoletni przewodniczący Komisji Maszyn
Elektrycznych przy BOBRME KOMEL oraz Komisji Normalizacyjnej Małych Maszyn Elektrycznych
w Instytucie Elektrotechniki.
W działalności stowarzyszeniowej dużą aktywność przejawiał w Stowarzyszeniu Elektryków
Polskich. Był wielokrotnym przewodniczącym Komisji w Oddziale Wrocławskim SEP, prezesem
Oddziału w latach 1966-68, a w latach 1969-68 – Zarządu Głównego SEP i przewodniczącym Komisji
Zagranicznej ZG SEP. Za działalność stowarzyszeniową została Mu nadana godność Honorowego
Członka SEP. Senat Politechniki Rzeszowskiej wyróżnił Go, za szczególny wkład w rozwój uczelni,
medalem „Zasłużony dla Politechniki Rzeszowskiej”.
Niezwykle cenna dla całego środowiska maszynowców była inicjatywa stworzenia stałego cyklu
konferencji naukowych pod nazwą Sympozjum Maszyn Elektrycznych. Początkowo było ono
organizowane przez ośrodek warszawski, a po piętnastu latach w roku 1965 przekształciło się w
Sympozjum Ogólnopolskie. Obecnie ma już ono status międzynarodowego.
Profesor Latek otrzymał wiele odznaczeń, w tym między innymi Krzyż Kawalerski Orderu
Odrodzenia Polski, Krzyż Oficerski Orderu Odrodzenia Polski, Medal Komisji Edukacji Narodowej oraz
Medal Ampere’a od Stowarzyszenia Elektryków Francuskich.
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 9
Zmarł w Warszawie 18 października 1991 r. i został pochowany na Powązkach Wojskowych w
Warszawie.
Wykaz doktorantów
1. Stefan Piątek, Współczynnik możliwości wirnika turbogeneratora z uzwojeniami aluminiowymi,
1960
2. Alfred Kiszko, Wyznaczenie rozkładu temperatur w prętach wirników silników klatkowych
silników indukcyjnych, 1965
3. Ryszard Matusiak, Metoda wyznaczania rozkładu temperatur w prętach uzwojenia i stali zębów
wirnika turbogeneratora dużej mocy w stanie cieplnie ustalonym, 1965
4. Jerzy Przybysz, Wyznaczenie rozkładu temperatur w wirnikach turbogeneratorów z chłodzeniem
pośrednim, 1968
5. Tadeusz Kaczmarek, Niektóre zagadnienia syntezy parametrów układu kompaundacji
indukcyjnych silników synchronizowanych, 1968
6. Zdzisław Życki, Metody wyznaczania podstawowych wymiarów prądnic synchronicznych z
biegunami kłowymi o magnesach trwałych, 1970
7. Andrzej Bytnar, Wyznaczanie rozkładu temperatur w stojanach turbogeneratorów z chłodzeniem
pośrednim w stanach cieplnie ustalonych, 1971
8. Leokadia Sobolewska, Konstrukcja wykresu pracy oraz wyznaczenie poślizgu krytycznego i
przeciążalności momentu silnika indukcyjnego jednofazowego bez fazy pomocniczej, 1971
9. Włodzimierz Przyborowski, Metoda analizy pola elektromagnetycznego w skrajnych elementach
statora turbogeneratora z uwzględnieniem ekranu anizotropowego, 1974
10. Ryszard Rut, Działanie elektrodynamiczne i termiczne prądu w pręcie klatki silnika
asynchronicznego głębokożłobkowego w stanie zwarcia, 1974
11. Wiesław Partyka, Rozkład temperatury w skrajnych elementach turbogeneratorów energetycznych,
1975
12. Jerzy Kłopotowski, Wybrane zagadnienia dotyczące określonych metod badań diagnostycznych
samochodowej prądnicy prądu przemiennego, 1976
13. Witold Jasienicki, Parametry sprzęgła indukcyjnego z wykorzystaniem energii poślizgu, 1979
14. Bronisław Mrugała, Zagadnienia termiczne silnika liniowego przy obciążeniu stochastycznym,
1980
15. Jan Mróz, Wpływ prętów biernych na przebieg momentu rozruchowego i naprężeń w prętach
silnika synchronicznego, 1983
16. Wojciech Krajewski, Analiza rozkładów pola elektromagnetycznego i naprężeń w elementach
metalowych kształtowanych impulsem elektromagnetycznym, 1984
17. Krzysztof Pyś, Model matematyczny procesu komutacji w silnikach uniwersalnych oraz kryterium
oceny warunków komutacji, 1985
18. Jadwiga Płoszyńska, Nagrzewanie trapezowych prętów uzwojeń klatkowych podczas zwarcia
silników indukcyjnych i w czasie ich długotrwałego rozruchu, 1989
Wykaz publikacji
1. Badanie maszyn elektrycznych prądu stałego, PWN 1953
2. Badanie maszyn elektrycznych prądu zmiennego, PWN, wyd. I, 1952, wyd. II, 1954
3. Badanie maszyn elektrycznych w przemyśle, Warszawa Wydawnictwo Naukowo-Techniczne,
wyd. I, 1987, wyd. II, 1978, wyd. III, 1987, wyd. IV
4. Maszyny elektryczne, cz. 1 i 2, Warszawa, wydawnictwo Politechniki Warszawskiej wyd. I, 1987,
wyd. II, 1981
5. Maszyny elektryczne w pytaniach i odpowiedziach Warszawa, Wydawnictwo Naukowo-
Techniczne, wyd. I, 1987, wyd. II, 1994
6. Pomiary laboratoryjne maszyn elektrycznych, Szczecin Dział Wydawnictwo Wyższej Szkoły
Morskiej, 1985, współautor Jarosław Hryniewicz
7. Poradnik inżyniera elektryka, t. 3, Aparaty, przyrządy i urządzenia elektryczne (autor Andrzej Au
et al., koordynator tomu Władysław Latek), Wydawnictwa Naukowo-Techniczne 1974

10 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
8. Poradnik inżyniera elektryka t. 2, Maszyny i napędy elektryczne, technika oświetleniowa (autor
Andrzej Bytnar et al., koordynatorzy tomu Władysław Latek, Włodzimierz Moroz), Warszawa,
Wydawnictwa Naukowo-Techniczne 1975
9. Teoria maszyn elektrycznych, Warszawa, Wydawnictwa Naukowo-Techniczne, wyd. I, 1982, wyd.
II, 1987
10. Turbogeneratory, Warszawa, Wydawnictwa Naukowo Techniczne,1973
11. Zarys maszyn elektrycznych, Warszawa, Wydawnictwa Naukowo Techniczne, wyd. I, 1974, wyd.
2. 1978
12. Skrypty wydawane nakładem Oficyny Wydawniczej Politechniki Warszawskiej (wielokrotnie
wznawiane)
13. Liczne artykuły w czasopismach fachowych polskich i zagranicznych oraz w materiałach
konferencyjnych
Eugeniusz Koziej, Wojciech Urbański

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 11
III. XXVI CYKL SEMINARYJNY
ZASTOSOWANIE KOMPUTERÓW W NAUCE I TECHNICE’2016
W ramach XXVI cyklu seminaryjnego „Zastosowanie Komputerów w Nauce i Technice’2016”
zaplanowano 49 odczytów, które zostaną wygłoszone na 19 zebraniach naukowych.
Odczyty odbywają się we wtorki w Sali E-27 w budynku Wydziału Elektrotechniki i Automatyki
Politechniki Gdańskiej (Gmach im. Profesora Kazimierza Kopeckiego). Początek wszystkich odczytów
o godzinie 14:15.
Sala wyposażona jest w środki audiowizualne, dostęp za pośrednictwem pamięci przenośnej ze
złączem USB.
Referaty po pozytywnej opinii recenzentów zostaną zakwalifikowane przez Komitet Naukowy do
druku w kolejnym Zeszycie Naukowym Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej,
który ukaże się w grudniu 2016 r.
Opłata związana z wydaniem materiałów seminaryjnych za każdy referat wynosi:
dla członków PTETiS - 150 PLN (opłata ulgowa)
dla pozostałych osób - 250 PLN
W przypadku, gdy objętość referatu przekracza 4 strony formatu A4, autorzy referatu pokrywają
także koszty wydania dodatkowych stron w wysokości 100 PLN za dodatkową stronę nieparzystą.
Istnieje również możliwość zamieszczenia kolorowych rysunków w tekście po wniesieniu dodatkowej
opłaty w wysokości 120 PLN za stronę z rysunkami.
Opłaty za udział w seminarium należy wpłacać na konto:
71 1020 1811 0000 0502 0078 5816
Polskie Towarzystwo Elektrotechniki Teoretycznej i Stosowanej - Oddział Gdańsk
Harmonogram odczytów
Data Imię i nazwisko Tytuł referatu Nr
ref.
12.04
Aleksandra Kamińska,
Marcin Strąkowski
Układ detekcji do optycznego tomografu
koherentnego – spektrometr Czernego –
Turnera
12
Marcin Mrotek,
Jerzy Pluciński
Computer-aided analysis of measured low-
coherence signals from biological samples
22
Kamil Dolny,
Michał Wiszniewski,
Robert Piotrowski
Wykonanie i sterowanie platformą Stewarta 9
19.04
Mikołaj Bartłomiejczyk Zastosowanie metod numerycznych w analizie
trakcyjnego układu zasilania – przykłady
praktyczne
3
Agnieszka Mikołajczyk,
Michał Grochowski
System wspomagający diagnostykę czerniaka
złośliwego przy pomocy metod przetwarzania
obrazu i algorytmów inteligencji obliczeniowej
21
26.04
Roman Śmierzchalski Struktura systemu sterowania statkiem
dynamicznie pozycjonowanym
49
Maksymilian Tomczyk
Michał Pacholczyk
Krzysztof Karwowski
Comprehensive Modelling of the Economical
Threshold of Railway Line Electrification
39
Andrzej Wilk,
Mirosław Mizan,
Krzysztof Karwowski,
Paweł Kaczmarek
Analiza drgań przewodów jezdnych sieci
trakcyjnej w aspekcie oceny jej stanu
technicznego
42
12 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
10.05
Marek Blok DSPElib - biblioteka C++ do szybkiej
implementacji
wieloszybkościowych algorytmów
przetwarzania sygnałów
4
Konrad Michalski,
Anna Golijanek
Jędrzejczyk
Stanowisko do pomiaru szerokości krawędzi
narty
20
17.05
Marcin Ogielski
Anna Golijanek-
Jędrzejczyk,
Leszek Rafiński
System pomiarowy do urządzenia typu stepper
dedykowany do prób wysiłkowych ,
26
Łukasz Lentka,
Janusz Smulko
Analiza skuteczności i złożoności obliczeniowej
metod usuwania trendu z danych pomiarowych
16
Tomasz Barnert Metoda grafu ryzyka w kontekście analizy
warstw zabezpieczeń
2
24.05
Stanisław Szczesny,
Anna Golijanek-
Jędrzejczyk,
Dariusz Świsulski
Szacowanie niepewności rezystancji
zmierzonej metodą techniczną
37
Piotr Kołodziejek Symptomy asymetrii wirnika w układach
napędowych o zmiennej prędkości kątowej
wału z silnikiem klatkowym
13
Ariel Dzwonkowski Szacowanie niepewności pomiaru układu do
diagnostyki łożysk tocznych
48
31.05
Bartosz Mudlaff,
Sylwia Babicz,
Janusz Smulko
System zabezpieczenia przed kradzieżą
pomieszczeń techniką RFID
23
Barbara Stawarz-Graczyk
Damian Sprawka
Głowica do pomiaru szumów diod LED w
szerokim zakresie prądów
35
07.06
Jan Piesik Implementacja wspomaganych komputerowo
narzędzi statystycznych do poprawy
niezawodności maszyn i urządzeń na linii
produkcji półfabrykatów
30
Marian Kostrzewski Metoda wyszukiwania bloków podobnych linii
w analizie antyplagiatowej plików źródłowych
programów komputerowych
14
Bartosz Tarakan,
Marcin Sarnicki,
Ryszard Zajczyk,
Stanisław Czapp,
Krzysztof Tarakan
Model farmy fotowoltaicznej i badanie jej
wpływu na system elektroenergetyczny
38
14.06
Adam Kurowski,
Józef Kotus,
Bożena Kostek,
Andrzej Czyżewski
Komputerowa symulacja rozkładu wektora
natężenia dźwięku w pobliżu dyfuzora
akustycznego
16
Jan Piesik,
Kazimierz T. Kosmowski
Zastosowanie metod statystycznych do analizy
zdarzeń nienormalnych oraz oceny
niezawodności i bezpieczeństwa linii
produkcyjnej z uwzględnieniem czynników
ludzkich
31
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 13
21.06
Stanisław Czapp
Seweryn Szultka
Wpływ sposobu ułożenia kabli
elektroenergetycznych na ich obciążalność
prądową długotrwałą
6
Ryszard Studański Komputerowe stanowisko pomiarowe do
analizy sygnałów radiokomunikacyjnych
rejestrowanych w szerokim paśmie
36
28.06
Ireneusz Rogala,
Kazimierz T. Kosmowski
Metoda analizy i oceny ryzyka potencjalnych
zdarzeń zagrażających w projektowaniu
systemu detekcji gazów wybuchowych w
obiektach przemysłowych
33
Przemysław Spychalski,
Ryszard Arendt
Rozproszony system wieloagentowy
wspomagający projektowanie wybranych
układów sterowania
34
04.10
Mariusz Dąbkowski Realizacja zadania automatycznego chwytania
przez robota przemysłowego RV-2AJ na
podstawie obrazu z kamery
7
Beata Pałczyńska,
Krystyna Maria Noga
Sieciowy rozproszony system pomiarowy w
laboratorium dydaktycznym
29
Mirosław Włas Regulacja mocy biernej w mikrosieciach z
źródłami wytwórczymi
43
11.10
Michał Pacholczyk
Dariusz Karkosiński
Wind Resource and Energy Yield Prediction
for Small Wind Farm on the Szubieniczne Hill
27
Stanisław Czapp
Kornel Borowski
Stanowisko do badania nowej metody pomiaru
rezystancji pętli zwarciowej
5
Karolina Marciniuk,
Bożena Kostek
Analiza rozkładu pojazdów w ruchu ulicznym
na podstawie zarejestrowanego sygnału
fonicznego
19
18.10
Mariusz Dąbkowski Nawigacja bezkolizyjna robota Pioneer 3DX
na podstawie obrazu z kamery.
8
Mirosław Włas Zastosowanie algorytmów sztucznych sieci
neuronowych do prognozowania zużycia
energii elektrycznej
44
Adam Łukasz Kaczmarek Zastosowanie algorytmu MSA (Multiple
Similar Areas) do wyznaczania głębokości w
wielowidokowych systemach widzenia
komputerowego
11
25.10
Tomasz Ferlin,
Paweł Galias,
Stanisław Galla
Pozyskiwanie energii z przepływu wody 10
Bartlomiej Adamczyk,
Barbara Florkowska
Modelling of space charge influence on
electrical
field distribution in corona discharges in air
1
Jacek Zawalich Regulator rozmyty o właściwościach
regulatora trójpołożeniowego
45

14 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
08.11
Krzysztof Kula Sterowanie poziomem cieczy przy pomocy
regulatora wykorzystującego model neuronowy
obiektu
15
Agnieszka Lazarowska Metoda uwzględniania dynamiki statku w
procesie wyznaczania bezpiecznej trajektorii.
17
Dariusz Palmowski,
Grzegorz Lentka,
Arkadiusz Hojka
Przegląd metod pomiaru małych energii
dla oceny układów „Energy-harvesting” i
systemów mikromocowych.
28
15.11
Józef Roehrich,
Paweł Zydroń,
Michał Bonk,
Łukasz Fuśnik
Kierunkowe układy detekcji VHF/UHF dla
lokalizacji źródeł wyładowań niezupełnych w
liniach napowietrznych i urządzeniach stacji
elektroenergetycznych
32
Paweł Zydroń
Paweł Mikrut
Józef Roehrich
Analiza teoretyczna i modelowanie wpływu
harmonicznych napięcia na powstawanie
wyładowań niezupełnych w układach
izolacyjnych wysokiego napięcia
47
Paweł Zydroń,
Michał Bonk,
Łukasz Fuśnik
Konrad Bęc,
Dominik Maniak,
Franciszek Szafrański
Modelowanie propagacji impulsów wyładowań
niezupełnych w uzwojeniach transformatorów
energetycznych z zastosowaniem stanowiska
laboratoryjnego
46
22.11
Krystyna Maria Noga Wykorzystanie modelu robota- człowieka
ROBOWISDOM w dydaktyce techniki cyfrowej
24
Krystyna Maria Noga Przykłady przetwarzania dźwięku w
środowisku Vissim
25
29.11
Mirosław Tomera Modyfikacja parametrów modelu
matematycznego dynamiki statku treningowego
Blue Lady
40
Mirosław Tomera Sterowanie modelem fizycznym tankowca
wzdłuż zadanej trasy przejścia
41
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 15
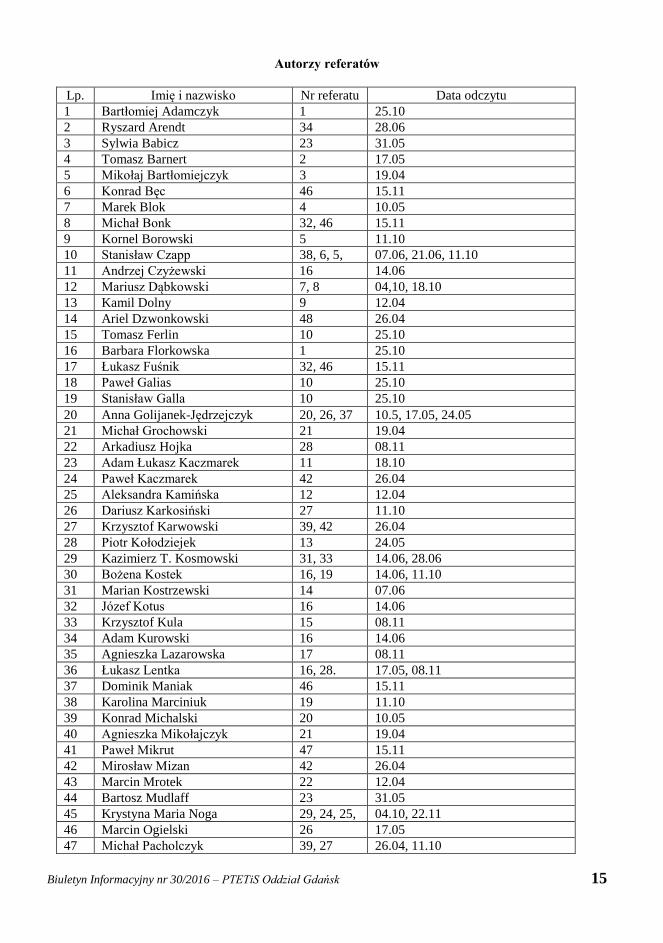
Autorzy referatów
Lp. Imię i nazwisko Nr referatu Data odczytu
1 Bartłomiej Adamczyk 1 25.10
2 Ryszard Arendt 34 28.06
3 Sylwia Babicz 23 31.05
4 Tomasz Barnert 2 17.05
5 Mikołaj Bartłomiejczyk 3 19.04
6 Konrad Bęc 46 15.11
7 Marek Blok 4 10.05
8 Michał Bonk 32, 46 15.11
9 Kornel Borowski 5 11.10
10 Stanisław Czapp 38, 6, 5, 07.06, 21.06, 11.10
11 Andrzej Czyżewski 16 14.06
12 Mariusz Dąbkowski 7, 8 04,10, 18.10
13 Kamil Dolny 9 12.04
14 Ariel Dzwonkowski 48 26.04
15 Tomasz Ferlin 10 25.10
16 Barbara Florkowska 1 25.10
17 Łukasz Fuśnik 32, 46 15.11
18 Paweł Galias 10 25.10
19 Stanisław Galla 10 25.10
20 Anna Golijanek-Jędrzejczyk 20, 26, 37 10.5, 17.05, 24.05
21 Michał Grochowski 21 19.04
22 Arkadiusz Hojka 28 08.11
23 Adam Łukasz Kaczmarek 11 18.10
24 Paweł Kaczmarek 42 26.04
25 Aleksandra Kamińska 12 12.04
26 Dariusz Karkosiński 27 11.10
27 Krzysztof Karwowski 39, 42 26.04
28 Piotr Kołodziejek 13 24.05
29 Kazimierz T. Kosmowski 31, 33 14.06, 28.06
30 Bożena Kostek 16, 19 14.06, 11.10
31 Marian Kostrzewski 14 07.06
32 Józef Kotus 16 14.06
33 Krzysztof Kula 15 08.11
34 Adam Kurowski 16 14.06
35 Agnieszka Lazarowska 17 08.11
36 Łukasz Lentka 16, 28. 17.05, 08.11
37 Dominik Maniak 46 15.11
38 Karolina Marciniuk 19 11.10
39 Konrad Michalski 20 10.05
40 Agnieszka Mikołajczyk 21 19.04
41 Paweł Mikrut 47 15.11
42 Mirosław Mizan 42 26.04
43 Marcin Mrotek 22 12.04
44 Bartosz Mudlaff 23 31.05
45 Krystyna Maria Noga 29, 24, 25, 04.10, 22.11
46 Marcin Ogielski 26 17.05
47 Michał Pacholczyk 39, 27 26.04, 11.10
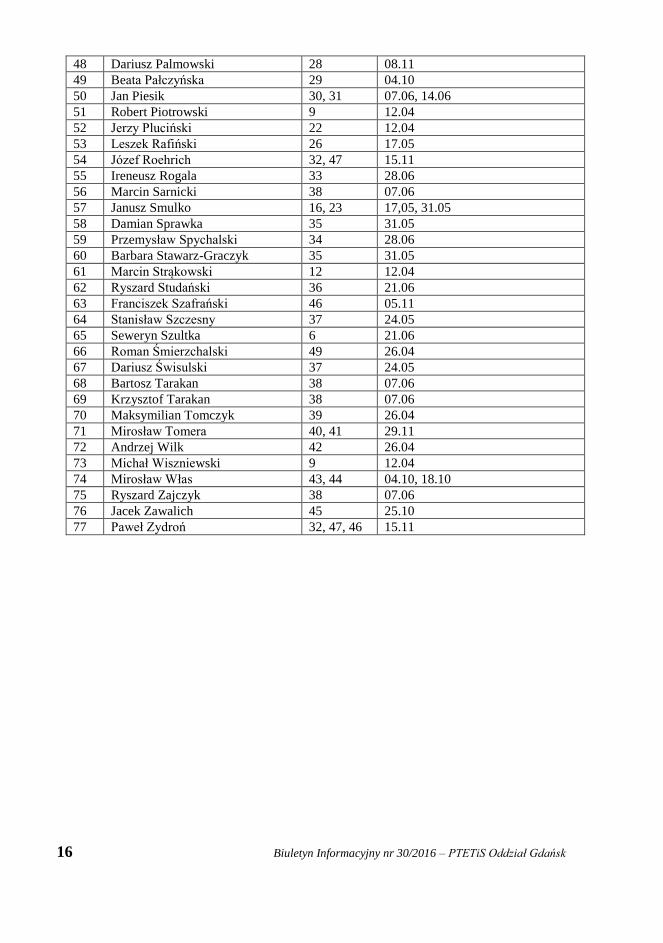
16 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
48 Dariusz Palmowski 28 08.11
49 Beata Pałczyńska 29 04.10
50 Jan Piesik 30, 31 07.06, 14.06
51 Robert Piotrowski 9 12.04
52 Jerzy Pluciński 22 12.04
53 Leszek Rafiński 26 17.05
54 Józef Roehrich 32, 47 15.11
55 Ireneusz Rogala 33 28.06
56 Marcin Sarnicki 38 07.06
57 Janusz Smulko 16, 23 17,05, 31.05
58 Damian Sprawka 35 31.05
59 Przemysław Spychalski 34 28.06
60 Barbara Stawarz-Graczyk 35 31.05
61 Marcin Strąkowski 12 12.04
62 Ryszard Studański 36 21.06
63 Franciszek Szafrański 46 05.11
64 Stanisław Szczesny 37 24.05
65 Seweryn Szultka 6 21.06
66 Roman Śmierzchalski 49 26.04
67 Dariusz Świsulski 37 24.05
68 Bartosz Tarakan 38 07.06
69 Krzysztof Tarakan 38 07.06
70 Maksymilian Tomczyk 39 26.04
71 Mirosław Tomera 40, 41 29.11
72 Andrzej Wilk 42 26.04
73 Michał Wiszniewski 9 12.04
74 Mirosław Włas 43, 44 04.10, 18.10
75 Ryszard Zajczyk 38 07.06
76 Jacek Zawalich 45 25.10
77 Paweł Zydroń 32, 47, 46 15.11

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 17
Streszczenia referatów wygłaszanych w cyklu seminaryjnym
”Zastosowanie Komputerów w Nauce i Technice 2016”
1. Modelling of space charge influence on electrical
field distribution in corona discharges in air
Bartlomiej Adamczyk, Barbara Florkowska
email: [email protected], [email protected]
The paper refers to corona discharges in high voltage overhead transmission lines resulting in
electromagnetic interferences and losses during power transmission. Initiation and development of these
phenomena depends on the electric field in the proximity of the phase conductors. The electric field
strength on the surface of corona source influences the size of the ionization air zone, thus the radius of
the corona zone. At the DC voltage of high voltage overhead transmission lines mechanism of corona
discharges is more complex than at AC voltage due to space charge cumulation. Type of charge space:
positive or negative polarity, their mobility in the electric field and the conditions for the formation of
electron avalanches are dependent on the polarity of the overhead line conductor. Space charges deform
the electric field distribution, leading to the attenuation or enhancement in the proximity of the corona
electrode. In a study of corona discharges, a model setup of point-to-plane electrodes is used, in which
the point electrode may have a positive or negative DC voltage or high potential or is grounded at AC
voltage. In simulations of corona discharges the point-to-plane configuration at DC voltage was used.
The electric field distributions, distorted due to the presence of space charges, were obtained from
numerical modeling. Paper presents comparison of the electric field distributions in the inter electrode
space at AC and DC voltage, as well as influence of the space charges on the corona inception, the
ionization air zone and conditions of corona pulse formation.
2. Metoda grafu ryzyka w kontekście analizy warstw zabezpieczeń
Tomasz Barnert
email: [email protected].
W referacie przedstawiono zagadnienia związane z oceną ryzyka w kontekście określania
wymagań nienaruszalności bezpieczeństwa SIL. Funkcje związane z bezpieczeństwem realizowane są
przez dedykowane przyrządowe systemy automatyki i są częścią warstwowego systemu bezpieczeństwa
obiektu przemysłowego. W procesie określania wymagań SIL stosuje się metody jakościowe oraz pół-
ilościowe bazujące na opisie ryzyka. Bierze się przy tym pod uwagę kilka podstawowych parametrów
ryzyka, które są związane z częstością wystąpienia zdarzeń awaryjnych oraz ich potencjalnymi
skutkami. W polskim przemyśle stosuje się najczęściej dwie metody określania wymagań SIL. Pierwszą
z nich jest metoda grafu ryzyka. Pozwala ona na szybkie wykonanie analizy, jednak charakteryzuje się
dość dużym uogólnieniem. Wyniki uzyskane z grafu ryzyka są trudne do interpretacji w dalszych
etapach analiz bezpieczeństwa. Drugą metodą jest analiza warstw zabezpieczeń, która korzysta z
wyników modelowania probabilistycznego różnego rodzaju awarii przemysłowych z uwzględnieniem
danych statystycznych uszkodzeń urządzeń. Wyniki tej analizy są dokładniejsze, jednakże potrzebny
nakład pracy i czasu jest znacznie większy w stosunku do metod jakościowych. W referacie
przedstawiono charakterystykę obu metod oraz porównano ich zalety i wady w kontekście analiz
przeprowadzanych w polskim przemyśle.
Zaproponowano rozszerzenie ogólnie stosowanej metody grafu ryzyka o nowe możliwości
rozbudowy modelu ryzyka (parametrów ryzyka) oraz kalibracji grafu w oparciu o matrycę ryzyka, która
powinna być podstawą opisu akceptowalności ryzyka w zakładach przemysłowych. Referat zamyka
przykład określenia wymagań SIL, który bazuje na nowym modelu grafu ryzyka. Komentarz dotyczący
uzyskanego wyniku odpowiada na pytanie, czy zaproponowana metoda może być stosowana jako
zamiennik analizy warstw zabezpieczeń i jakie mogą być dalsze jej zastosowania.
3. Zastosowanie metod numerycznych w analizie trakcyjnego
układu zasilania – przykłady praktyczne
Mikołaj Bartłomiejczyk

18 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
email: [email protected]
Komunikacja miejska, a w szczególności trolejbusowa cechuje się znacznym wpływem kongestii
ruchu drogowego. Efektem tego obciążenie trakcyjnego układu zasilania ma losowy charakter. Z tego
powodu zastosowanie dla celów analizy energetycznej klasycznych analitycznych metod
obliczeniowych wiąże się z brakiem możliwości uwzględnienia wpływu losowych czynników na ruch
pojazdów, a więc ze znaczną rozbieżnością między obliczeniami teoretycznymi a rzeczywistym
zachowaniem się układu. W związku z tym metody statystyczne są predestynowane e analizie
trakcyjnych systemów zasilania. W artykule zaprezentowano przykładowe aplikacje metod
symulacyjnych i numerycznych w analizie układów zasilania sieci trolejbusowych.
4. DSPElib - biblioteka C++ do szybkiej implementacji wieloszybkościowych
algorytmów przetwarzania sygnałów
Marek Blok
email: [email protected]
W pracy przedstawiono opracowaną przez autora bibliotekę C++, DSPElib – Digital Signal
Processing Engine library, pozwalającą na prostą i szybką implementację wieloszybkościowych
algorytmów przetwarzania sygnałów, a co za tym idzie na szybkie prototypowanie tego typu
algorytmów i włączanie ich do autonomicznych aplikacji przeznaczonych na platformę Windows lub
Linux. Korzystając z prezentowanej biblioteki programista może oprogramować algorytm
przetwarzania sygnałów bezpośrednio w oparciu o jego schemat blokowy. Typowe bloki przetwarzania
deklaruje się jako obiekty, a połączenia pomiędzy blokami definiuje się jednym poleceniem wskazując
obiekty reprezentujące łączone bloki oraz nazwy odpowiednich wejść i wyjść. Użytkownik biblioteki nie
musi wdawać się w szczegóły implementacji bloczków oraz relacji pomiędzy nimi, co jest znacznym
ułatwieniem zwłaszcza, gdy w algorytmie występują sprzężenia zwrotne, a bloczki pracują z różnymi
szybkościami próbkowania. Otwarty charakter biblioteki umożliwia zaawansowanym użytkownikom na
uzupełnianie zestawu dostępnych bloczków DSP korzystając z uproszczonych wzorców.
Możliwość oprogramowywania algorytmów cyfrowego przetwarzania sygnałów na poziomie
struktury blokowej jest szczególnie istotna na etapie prototypowania algorytmów. Zwłaszcza przydatna
jest łatwość modyfikowania struktury oraz możliwość uzyskania wglądu w sygnały w dowolnym
miejscu schematu poprzez dodanie jednego obiektu reprezentującego wyjście do pliku oraz jego
podłączenie do interesującego nas wyjścia. Samo uproszczenie implementacji algorytmów nie zapewnia
jednak bezbłędności ich implementacji. Pomimo braku błędów składni C++ opracowany kod może
reprezentować nieprawidłowy schemat blokowy. Dlatego biblioteka zawiera w sobie rozbudowane
mechanizmy detekcji i raportowania błędów zawartych w zaimplementowanej strukturze algorytmu
przetwarzania sygnału aktywne przy uruchamianiu aplikacji w trybie debugowania. Przykładowo
biblioteka wykrywa i raportuje, podając nazwy powiązanych z problemem bloków i wyjść, próby
podłączenia wielu wyjść do jednego wejścia, pętle sprzężenia zwrotnego nie zawierające opóźniacza czy
też niezgodność zegarów łączonych bloków. Funkcjonalność ta ułatwia zrealizowanie struktury
spełniającej zasady realizacji algorytmów cyfrowego przetwarzania sygnałów. Jednak struktura
spełniająca te zasady może nie być zgodna z założeniami programisty. W takich sytuacjach przydatna
jest dostępna w bibliotece funkcja generacji schematów na podstawie utworzonej struktury bloków
przetwarzania sygnałów, która niekoniecznie wynika z samego kodu, bo może być ona konstruowanych
programowo, np. zależnie od parametrów wprowadzanych przez użytkownika aplikacji.
Prezentowana biblioteka jest wykorzystywana przez jej autora w pracy badawczej oraz dydaktyce.
Posługując się biblioteką studenci już po krótkim przygotowaniu mogą samodzielnie implementować,
modyfikować i testować autonomiczne aplikacje DSP korzystając z narzędzi OpenSource’owych.
5. Stanowisko do badania nowej metody pomiaru rezystancji pętli zwarciowej
Stanisław Czapp, Kornel Borowski
e-mail: [email protected]

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 19
Pomiar impedancji/rezystancji pętli zwarciowej w instalacjach niskiego napięcia z wyłącznikami
różnicowoprądowymi jest kłopotliwy, ponieważ może powodować ich zbędne zadziałania. Aby uniknąć
zbędnych zadziałań, w szczególności najpowszechniej stosowanych wyłączników różnicowoprądowych
o prądzie znamionowym różnicowym 30 mA, stosuje się prąd pomiarowy o małej wartości, np. 10–
15mA. Niestety, tak mała wartość prądu pomiarowego w wielu przypadkach nie zapewnia
wystarczającej dokładności pomiaru. W artykule opisano stanowisko laboratoryjne do badania nowej
metody pomiaru rezystancji pętli zwarciowej. Metoda ta nie powoduje zbędnego zadziałania
wyłączników różnicowoprądowych prądzie znamionowym różnicowym 30 mA, mimo zastosowania
prądu pomiarowego o wartości kilku amperów.
6. Wpływ sposobu ułożenia kabli elektroenergetycznych
na ich obciążalność prądową długotrwałą
Stanisław Czapp, Seweryn Szultka
email: [email protected]
Obciążalność prądowa długotrwała przewodów i kabli elektroenergetycznych zależy od sposobu
ich ułożenia, co jest związane ze sposobem i intensywnością oddawania ciepła. Kabel
elektroenergetyczny ułożony w zmiennych warunkach, np. ziemia – woda – powietrze ma obciążalności
długotrwałą wynikającą z najgorszych warunków otoczenia pod względem oddawania ciepła. Celem
artykułu jest przedstawienie modeli cieplnych jednożyłowych kabli elektroenergetycznych niskiego
napięcia. Modele te będą postawą propozycji poprawy obciążalności prądowej długotrwałej kabli przy
zmiennym sposobie ich ułożenia.
7. Realizacja zadania automatycznego chwytania przez robota
przemysłowego RV-2AJ na podstawie obrazu z kamery
Mariusz Dąbkowski
Jedną z najważniejszych czynności, do których wykorzystuje się manipulatory przemysłowe jest
przenoszenie elementów, zwane fachowo cyklem „pick and place” („złap-przenieś-odłóż”). Zadanie to
robot może wykonywać bez rozpoznawania otoczenia, kiedy ruchy są zaprogramowane na stałe oraz ze
sprzężeniem zwrotnym od środowiska pracy, kiedy jego ruchy nie są całkowicie zdeterminowane na
etapie uczenia. System autonomicznie decyduje o modyfikacji trajektorii ruchu chwytaka w zależności
od położenia detalu.
W artykule przedstawiono realizację zadania automatycznego chwytania (przenoszenia i
odkładania przedmiotu) przez robota przemysłowego RV-2AJ wyposażonego w autorski system
wizyjny. Na wstępie opisano ogólne problemy występujące w czynności automatycznego przenoszenia
elementów przez manipulator. Należy do nich przede wszystkim konieczność określenia położenia i
orientacji przenoszonego przedmiotu, co rodzi potrzebę pozyskania informacji o otoczeniu robota. W
przeszłości używano prostych czujników dotykowych i odbiciowych. Dziś wykorzystuje się czujniki
wizyjne, czyli kamery. Umożliwił to postęp, jaki dokonał się w technice półprzewodnikowej,
pozwalający na konstruowanie coraz tańszych kamer cyfrowych o coraz większej rozdzielczości oraz
komputerów o coraz większej wydajności obliczeniowej. Z drugiej strony rozpowszechnienie systemów
wizyjnych, w przemyśle i nie tylko wsparł rozwój technik informatycznych, który zaowocował
powstaniem specjalizowanych, a co ważniejsze, darmowych bibliotek zawierających zaimplementowane
narzędzia do obróbki cyfrowej obrazu. Można tu wyróżnić przede wszystkim biblioteki OpenCV oraz
AForge.NET. Innymi zagadnieniami, które należy wziąć pod uwagę podczas realizacji zadania
chwytania są: kształt i maksymalny rozmiar przedmiotu przenoszonego, rodzaj materiału, z którego jest
wykonany, chropowatość i temperatura powierzchni. Nie można również zapomnieć o zapewnieniu
odpowiedniego – jasnego oświetlenia sceny oraz wyraźnego odróżnienia detalu od tła. Wszystkie te
elementy mają łącznie kluczowy wpływ na poprawne uchwycenie detalu przez palce robota.
W artykule podano podstawowe założenia definiujące zadanie automatycznego chwytania dla
robota RV-2AJ wyposażonego w chwytak dwupalcowy. Maksymalne wymiary przedmiotu, o przekroju
prostokątnym lub owalnym, nie mogą przekroczyć 55 mm. Materiał, z którego wykonany jest element
musi być wystarczająco twardy i wytrzymały na ściskanie, aby wytrzymać siłę 6,2 N nacisku, która nie
20 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
podlega regulacji. Zdefiniowano, że detal będzie miał kolor zielony, który doskonale odcina się od
jasnego koloru blatu stanowiska. System wizyjny przedstawiony w artykule można podzielić na dwie
części: warstwę sprzętową oraz programową. Do pierwszej należy czujnik, czyli kamera oraz komputer
o dużej mocy obliczeniowej. Natomiast drugą stanowi autorska aplikacja opracowana w środowisku C#
z wykorzystaniem biblioteki AForge.NET, która odpowiada za zrealizowanie głównego celu, a więc
uchwycenie elementu, przeniesienie i odłożenie go w zdefiniowanym miejscu. W artykule
przedstawiono algorytm działania programu. Następnie opisano funkcje poszczególnych komponentów
programowych, a więc części odpowiadającej za: automatyczny pobór obrazu z kamery USB, jego
obróbkę cyfrową w celu określenia położenia detalu, komunikację z kontrolerem robota oraz
automatyczne sterowanie jego ruchami. W końcowej części publikacji opisano wyniki testów
weryfikacyjnych powstałego systemu. Przedstawiono również porównanie prędkości działania
autorskiego systemu z dostępnymi na rynku komercyjnymi rozwiązaniami.
8. Nawigacja bezkolizyjna robota Pioneer 3DX na podstawie obrazu z kamery
Mariusz Dąbkowski
email: [email protected]
W artykule przedstawiono i opisano strukturę systemu sterowania realizującego zadanie nawigacji
bezkolizyjnej robota mobilnego Pioneer 3DX poruszającego się na podstawie informacji z kamery. Na
wstępie artykułu podano założenia dotyczące realizacji misji. Najważniejszymi z nich są: przybliżona
dekompozycja komórkowa powierzchni, ruch robota w 4 kierunkach, przeszkody nieruchome w
otoczeniu robota.
Nawigacja bezkolizyjna robotów jest najważniejszym zadaniem, jakie się przed nimi stawia. Ze
względu na dostęp do wiedzy o otoczeniu można wyróżnić dwie jego różne realizacje: nawigacja na
podstawie mapy terenu oraz nawigacja tylko na podstawie danych sensorycznych. W pierwszym
przypadku istnieje dostęp do częściowej lub pełnej informacji na temat otoczenia i robota. Na tej
podstawie można wyznaczyć, najczęściej optymalną globalnie (jeśli istnieje) ścieżkę. Informację o
otoczeniu dostarcza system pomiarowy, którym najczęściej jest kamera CCD. Ze względu na dużą ilość
informacji nawigacja w czasie rzeczywistym jest utrudniona lub niemożliwa. Dodatkowo, przy
założeniu uwzględniania przeszkód w ruchu lub nowo pojawiających się, mapy należy aktualizować co
zadany, bardzo krótki okres czasu, co pogłębia problemy z prędkością działania tych metod. Dzięki
uproszczeniom zadania nawigacji bezkolizyjnej (np.: bez uwzględnienia przeszkód dynamicznych) oraz
zmniejszeniu ilości danych o otoczeniu można znacząco przyspieszyć działanie algorytmów
poszukiwawczych. Do metod globalnych należą między innymi: metoda grafów Voronoia, grafu
widoczności, elastycznej wstęgi oraz wszystkie te, które wykorzystują przybliżony podział komórkowy
powierzchni otoczenia (metoda propagacji fali, algorytmy grafowe zupełne, heurystyczne, rojowe,
genetyczne).
W przypadku braku informacji o środowisku zewnętrznym robota jedyną możliwością zapewnienia
bezkolizyjności ruchu jest wykorzystanie czujników pokładowych robota. Na podstawie dostarczonych
informacji planowana jest jedynie ścieżka w ujęciu lokalnym, czyli w najbliższym otoczeniu robota
będącym w zasięgu czujników. Tak powstała ścieżka jest najczęściej daleka od optymalnej. Jednak ze
względu na brak modelu otoczenia (mapy) ilość informacji jest niewielka, co pozwala systemowi
sterowania robotem, z jednej strony na pracę w czasie rzeczywistym, z drugiej na łatwe uwzględnienie
dynamicznych zmian zachodzących w środowisku. Do lokalnych metod nawigacji należą przede
wszystkim strategie behawioralne wzorowane na reakcjach istot żywych wiążące bezpośrednio (bez
udziału modelu) sygnały sensoryczne ze sterującymi napędami.
Ze względu na mnogość metod generowania trajektorii na podstawie mapy w artykule ograniczono
się do przedstawienia wybranych trzech algorytmów: grafowego zupełnego Dijkstry, heurystycznego A*
oraz rojowego ACO (ant colony optimization – algorytm optymalizacji rojem mrówek). Podano krótki
opis tych algorytmów. Główną część artykułu stanowi opis systemu sterowania robota
zaimplementowany w języku C/C++ w środowisku Visual Studio 2010. Opisano pokrótce algorytm
działania programu oraz jego poszczególne komponenty: interfejs graficzny, część służącą obróbce
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 21
cyfrowej obrazu oraz generowaniu trajektorii i realizacji ruchu przez urządzenie. Następnie
przedstawiono wyniki testów weryfikacyjnych poprawności realizacji trajektorii w środowisku z
przeszkodami statycznymi oraz porównano czas generowania ścieżek obydwoma metodami. W
podsumowaniu przedstawiono możliwe kierunki rozwoju systemu.
9. Wykonanie i sterowanie platformą Stewarta
Kamil Dolny, Michał Wiszniewski, Robert Piotrowski
email: [email protected], [email protected]
Platforma Stewarta-Gougha stała się popularnym tematem już od czasu jej wynalezienia w roku
1965. Od tego momentu powstała bardzo pokaźna liczba publikacji na jej temat. Dotyczyły one przede
wszystkim kinematyki, dynamiki i przestrzeni roboczej platformy. Oryginalna wersja platformy opierała
się na siłownikach hydraulicznych. W krótkim czasie powstały jej modyfikacje, w których siłowniki
hydrauliczne, zastąpiono serwomechanizmami. Umożliwiło to wzrost dynamiki górnej platformy.
Platforma Stewarta z powodzeniem znajduje zastosowanie w różnego rodzaju symulatorach jazdy i
lotów. Dzięki sześciu stopniom swobody jest w stanie symulować ruch pojazdu lub samolotu.
W artykule opisano projekt, wykonanie i oprogramowanie platformy Stewarta. Artykuł ma
charakter multidyscyplinarny i obejmuje elektronikę, automatykę, informatykę oraz mechanikę.
10. Pozyskiwanie energii z przepływu wody
Tomasz Ferlin, Paweł Galias, Stanisław Galla
email: [email protected], [email protected], [email protected]
W referacie poruszono temat związany z odzyskiwaniem energii z nietypowych źródeł.
Przedstawiono wyniki prac nad układem wykorzystującym przepływ strumienia wody występujący
zarówno w warunkach domowych instalacjach wodnych jak i naturalnych cieków wodnych.
Zaprezentowane zostaną wyniki pracy nad wykorzystane pozyskanej energii min. do celów
dekoracyjnych w warunkach domowych lub do wstępnej ochrony bakteriobójczej wody na ostatnim
etapie dostarczania jej do użytkownika końcowego którym mogą być zarówno ludzie (w warunkach
środowiska domowego) jak i zwierzęta w przypadku zastosowań zewnętrznych.
11. Zastosowanie algorytmu MSA (Multiple Similar Areas) do wyznaczania
głębokości w wielowidokowych systemach widzenia komputerowego
Adam Łukasz Kaczmarek
email: [email protected]
Artykuł poświęcony jest wyznaczaniu odległości na podstawie zdjęć z układów wielu kamer w celu
wykonania skanów trójwymiarowych obiektów rzeczywistych. Powszechnie stosowane metody
określania odległości na podstawie zdjęć oparte są na widzeniu stereoskopowym, w którym pozyskuje
się zdjęcia z pary kamer, a następnie na podstawie lokalizacji obiektów na tych zdjęciach oszacowywana
jest odległość między urządzeniami rejestrującym obraz, a badanymi obiektami rzeczywistymi. W celu
zwiększenia dokładności pomiaru odległości zastosować można układy zawierające więcej niż dwie
kamery. Dla tego rodzaju układu kamer opracowany został algorytm MSA (Multiple Similar Areas).
Został on opracowany przez autora niniejszego artykułu. Algorytm ten przeznaczony jest do określania
odległości za pomocą pięciu kamer umieszczonych w ściśle określonym położeniu. Układ pięciu kamer
składa się z kamery centralnej oraz czterech kamer bocznych. Odległości między kamerą centralą a
każdą z kamer bocznych są sobie równe. Wszystkie kamery skierowane są w tym samym kierunku.
Kamery boczne znajdują się po bokach kamery centralnej, nad nią oraz pod nią. Dzięki takiemu
rozmieszczeniu kamer możliwe jest precyzyjne wykonanie zdjęć badanych obiektów, co pozwala na
zwiększenie dokładności pomiaru odległości między układem kamer a obiektami. Przeprowadzone
zostały ponadto eksperymenty, które potwierdziły skuteczność algorytmu MSA. Alternatywą do metod
określania odległości za pomocą kamer stereoskopowych są urządzenia tj. kamery czasu przelotu (Time-
of-flight cameras) i trójwymiarowe skanery światła strukturalnego (3D structure+light scanners.
Urządzenia te charakteryzują się tym, że w celu dokonania pomiaru emitują fale świetlne, a następnie
rejestrują odbicie tych fal lub ich załamani na badanych obiektach. Na pomiar wpływa jednak to, że

22 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
badane obiekty mogą być oświetlone z innych źródeł światła. W szczególności pomiar za pomocą tych
urządzeń jest zakłócony, jeśli badane obiekty znajdują się w zasięgu intensywnego światła naturalnego.
Dodatkowo, urządzenia takie nie są dostosowane do określania odległości od obiektów znajdujących się
w znacznej odległości od urządzenia pomiarowego. Sytuacja taka występuje na przykład podczas
trójwymiarowego skanowania budynków. Konieczne jest w takim przypadku wyemitowanie bardzo
intensywnej wiązki pozwalającej oświetlić cały budynek. Problemy te nie występują w przypadku
wykonywania skanów trójwymiarowych za pomocą kamer. Algorytm MSA opisywany w tym artykule
przeznaczony jest do układów pięciu kamer, jednak algorytm ten zaadaptowany może również zostać do
układów składających się z różnej liczby kamer oraz takich, w których kamery umieszczane są w innym
położeniu niż opisany wyżej układ pięciokamerowy. Adaptacja algorytmu dla innego rodzaju systemów
widzenia komputerowego jest przedmiotem tego artykułu. Artykuł przedstawia dotychczas
przeprowadzone badania poświęcone algorytmowi MSA oraz proponuje uogólnienie tego algorytmu.
12. Układ detekcji do optycznego tomografu koherentnego
– spektrometr Czernego – Turnera
Aleksandra Kamińska, Marcin Strąkowski
Optyczna tomografia koherentna (OCT) jest nieinwazyjną metodą obrazowania struktury badanych
obiektów z wykorzystaniem optycznej wiązki skanującej oraz detekcji sygnału opartej na interferometrii
niskokoherentnej. Obecnie jest ona powszechnie stosowana przede wszystkim w aplikacjach
medycznych, w szczególności w oftalmologii. Szczególnie systemy oparte na analizie sygnału w
dziedzinie widma (SD-OCT – ang. Spectral Domain Optical Coherence Tomography), ze względu na
bardzo wysokie szybkości obrazowania w wysokiej rozdzielczości, umożliwiające badania obiektów w
czasie rzeczywistym, wyznaczają nowe kierunki rozwoju systemów OCT i ich aplikacji. Jednym z
kluczowych elementów systemu SD-OCT jest spektrometr o wysokiej rozdzielczości, rejestrujący
promieniowanie optyczne w szerokim zakresie z dużą szybkością. Celem niniejszej pracy jest
przedstawienie stosowanych rozwiązań na przykładzie projektu spektrometru pracującego w zakresie
widzialnym w granicach od 450 nm do 800 nm.
Projekt i realizacja spektrometru, dedykowanego do systemu OCT, wymaga określenia
właściwości metrologicznych takich jak szybkość pracy systemu, zakres widmowy stosowanego źródła
szerokopasmowego oraz maksymalny zakres skanowania próbki w głąb. Na tej podstawie wyznaczono
wstępne wartości parametrów spektrometru: 1) rozdzielczość minimum 4096 linii, 2) zakres długości fal
od 450 nm do 830 nm oraz szybkość akwizycji danych powyżej 20 kHz (wymagania dostosowane do
pracy źródła NKT Photonics CompactK). Przy takich wymaganiach standardowe układy oparte na
zastosowaniu soczewek są kosztowne i obarczone aberracjami, istotnie wpływającymi na właściwości
metrologiczne całego systemu OCT. Zdecydowano się na znacznie korzystniejsze rozwiązanie z
zastosowaniem układu ze zwierciadłami. Zadbano także o odpowiednią geometrię układu. Wybrano
konfigurację spektrometru w oparciu o budowę monochromatora Czernego – Turnera. W takiej
konfiguracji elementem kolimującym jest sferyczne zwierciadło wklęsłe. Za funkcję monochromatora
światła odpowiada natomiast odbiciowa siatka dyfrakcyjna. Następnie wiązka ogniskowana jest przez
kolejne, sferyczne zwierciadło wklęsłe na wyjściu urządzenia i rejestrowana przez wysokiej klasy linijkę
detektorów w technologii CMOS. Pomimo wykorzystania zwierciadeł układ charakteryzuje się
wprowadzeniem aberracji optycznych (coma, sferycznej i astygmatyzmu). Do kompensacji
astygmatyzm użyto cylindryczną soczewkę. Jest to aberracja wprowadzana przez sferyczność
zwierciadeł. Astygmatyzm jest zależny od promienia krzywizny oraz od kątów odbicia od zwierciadeł.
Aberracje sferyczną i coma wyeliminowano stosując odpowiednią geometrię układu.
Sterowanie spektrometrem jak i akwizycja i analiza danych pomiarowych odbywa się z poziomu
aplikacji napisanej w środowisku LabView (National Instruments). W ramach prezentowanych
rezultatów prac zostanie przedstawiony pełen proces projektowania spektrometru dedykowanego do
systemów OCT, jego realizacja fizyczna wraz z omówieniem warstwy programowej systemu oraz
wyniki testów potwierdzające zgodność parametrów systemu z założeniami projektowymi.
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 23
13. Symptomy asymetrii wirnika w układach napędowych o zmiennej
prędkości kątowej wału z silnikiem klatkowym
Piotr Kołodziejek
email: [email protected]
W artykule przedstawiono badania eksperymentalne symptomów asymetrii wirnika silnika
indukcyjnego klatkowego wynikającej z uszkodzenia. Uwzględniono współczesne struktury układów
sterowania napędami o zmiennej prędkości kątowej wału, sterowania z pomiarem prędkości kątowej
wału oraz sterowania bezczujnikowego. Wyniki przeprowadzonych badań znajdują zastosowanie w
diagnostyce układu napędowego. Wybór sygnału diagnostycznego istotnie wpływa na możliwości
detekcji uszkodzenia we wczesnej fazie rozwoju lub przy ograniczonym obciążeniu silnika.
Przedstawiono badania wrażliwości zmiennych stanu oraz zmiennych sterujących na asymetrię wirnika.
14. Metoda wyszukiwania bloków podobnych linii w analizie antyplagiatowej
plików źródłowych programów komputerowych
Marian Kostrzewski
email: [email protected]
Dane gromadzone na dyskach współczesnych komputerów zazwyczaj nie są unikalne, fragmenty
składowanych danych są powtórzeniami. W niektórych obszarach ludzkiej aktywności istnieje potrzeba
wskazania miejsc wystąpienia ciągów powtórzonych danych. Do takich obszarów należy analiza
antyplagiatowa. Jednym z miejsc gdzie taka analiza może być wykorzystywana jest praca
współczesnego nauczyciela, gdzie oprócz sprawdzenia poprawności przedłożonego rozwiązania czy
terminowości złożenia pracy zainteresowanie budzi także próba ustalenia na ile dostarczona praca jest
samodzielna, czy nie występują w niej zapożyczenia, itp. Dzisiejsze realia są takie, że aby wyszukać
możliwe powtórzenia trzeba przejrzeć wiele plików, ich liczba może iść w setki a nawet tysiące. Przy
badaniu populacji rzędu tysiąca plików trzeba potencjalnie przeanalizować około pół miliona różnych
par plików. Bez zastosowania komputera analiza tak licznych danych jest nierealna.
Teksty programów komputerowych są plikami o dostępie sekwencyjnym. Plik sekwencyjny składa
się z linii, każda z linii składa się ze znaków kodu ASCII, gdzie jeden ze znaków tzw. znak końca linii
jest wyróżniony, linie mogą być różnej długości. Operacje na plikach sekwencyjnych są dobrze znane;
wiodące języki programowania oferują różnorodne funkcje biblioteczne do obsługi takich plików. Cechą
charakterystyczną plików sekwencyjnych jest to, że a priori nie jest znane miejsce wystąpienia w nim n-
tej linii, aby to ustalić należy odczytać wszystkie linie poprzednie w pliku. Sprawia to, że operacje inne
niż sekwencyjne mimo, że możliwe, są kosztowne czasowo. Ten fakt w zestawieniu ze znaczną liczbą
operacji na plikach, które trzeba by wykonać przy wyszukiwaniu powtórzeń skłania do poszukiwania
rozwiązań redukujących czas przetwarzania.
W artykule prezentuje się metodę analizy antyplagiatowej, gdzie badaniu podlegają nie oryginalne
pliki sekwencyjne ale ich zamienniki, składające się z żetonów stałej długości. Każdy żeton jest
odpowiednikiem linii tekstu w pliku tekstowym. Rozważa się stosowanie różnych rozwiązań jako
funkcji generujących żetony. Użycie pliku składającego się z żetonów umożliwia stosowanie
efektywnych mechanizmów dostępu swobodnego do danych będących odpowiednikiem linii pliku.
Ponadto sprawniejsze jest odnajdywanie identycznych fraz (linii); zamiast porównywania tablic znaków
koniecznych do zastosowania w przypadku pliku źródłowego, porównuje się tylko jedną wartość
całkowitoliczbową wykonywaną przez współczesne komputery w jednym cyklu zegara.
Całość ilustrowana jest przykładem zastosowania na danych pochodzących ze studenckich prac
domowych; są to pliki z kodami krótkich programów w języku C, w których wystandaryzowano użycie
białych znaków.
15. Sterowanie poziomem cieczy przy pomocy regulatora
wykorzystującego model neuronowy obiektu
Krzysztof Kula
mail: [email protected]
24 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
Implementacja sieci neuronowych w procesach sterowania czasu rzeczywistego natrafia na różne
trudności. O ile włączenie sieci neuronowych do adaptacji z identyfikacją bezpośrednią nie jest
uznawane za wystarczająco odporne, to wykorzystanie SSN do identyfikacji modeli nie budzi już takich
obaw. Użytkowe wykorzystanie modeli matematycznych systemów dynamicznych jest otwartym i
rozwojowym tematem w automatyce.
W artykule przedstawiono uniwersalną metodę sterowania procesem nieliniowym z
wykorzystaniem regulatora IMC zawierającym w swej strukturze neuronowy model tego obiektu
Podejście IMC było opracowane na potrzeby sterowania obiektami liniowymi. Gdy model obiektu
utworzony jest przy zastosowaniu linearyzacji wokół wybranego punktu pracy, to może on być dokładny
tylko w bliskim otoczeniu tego punktu. Gdy punkt pracy ulegnie zmianie, to efekt nieliniowości nie
może być odtworzony przy użyciu takiego modelu, co pogarsza jakość regulacji a także w skrajnych
przypadkach prowadzić może do utraty stabilności układu.
Przedstawiona koncepcja układu regulacji wymaga opracowania ( ciągłego) regulatora IMC, który
wykorzystuje jako swoją integralną część zarówno model jak i model odwrotny obiektu nieliniowego.
Do konstrukcji tych modeli została zastosowana sztuczna siec neuronowa (SSN) z propagacją wsteczną
błędu. Ponieważ do syntezy regulatora z modelem wewnętrznym nieodzowny jest również model
odwrotny, z uwagi na potrzebę odwracania charakterystyk ograniczających poziom sygnałów do
osiągnięcia tego efektu zamiast neuronowego modelu odwrotnego zastosowano technikę inwersji
modelu przy pomocy sprzężenia zwrotnego.
Referat przedstawia w miarę uniwersalną metodę sterowania, która dzięki zastosowanej strukturze
układu regulacji oraz modelowi procesu sporządzonemu przy użyciu SSN stanowić może sprawne
narzędzie w procesie sterowania obiektami nieliniowymi, na które oddziałują niemierzalne zakłócenia.
Dzięki wkomponowaniu w strukturę regulatora modelu obiektu obejmującego szeroki zakres zmian
sygnałów sterujących układ posiada zdolność adaptacji do zmieniających się warunków pracy.
Rozpatrywany w tym referacie proces stabilizacji poziomu cieczy w zbiorniku o sterowanym
wypływie jest nieliniowy. Proponowana struktura układu regulacji może być zaimplementowana
również dla innych obiektów o znacznej zmienności własności statycznych i dynamicznych w różnych
punktach pracy. Indywidualnym problemem pozostaje jednak utworzenie modelu neuronowego, który
byłby w stanie oddawać własności obiektu dla szerokiego spektrum sygnałów wejściowych. W pracy
przedstawiony został opis matematyczny obiektu a także struktura modelu neuronowego oraz sposób
jego odwracania. Zachowanie się obiektu oraz proces sterowania został zasymulowany przy pomocy
pakietu oprogramowania Matlab/Simulink ( ver.2014 a). Otrzymane wyniki porównano z układem
IMC wykorzystującym liniowy analogowy model obiektu.
16. Komputerowa symulacja rozkładu wektora natężenia dźwięku
w pobliżu dyfuzora akustycznego
Adam Kurowski1, Józef Kotus1, Bożena Kostek2, Andrzej Czyżewski1
email: 1.{adakurow, joseph, andcz}@sound.eti.pg.gda.pl, [email protected]
Celem referatu jest przedstawienie procesu przygotowania oraz sposobu przeprowadzania
numerycznej symulacji rozkładu wektora natężenia dźwięku w pobliżu dyfuzora akustycznego.
Zaprezentowane zostały wyniki symulacji, które zweryfikowano poprzez porównanie z danymi
uzyskanymi za pomocą pomiaru. Posłużono się różnymi dostępnymi rozwiązaniami umożliwiającymi
symulację zjawisk akustycznych, zarówno pakietami komercyjnymi, jak i dostępnymi rozwiązaniami
typu open-source. Symulacja została przeprowadzona z wykorzystaniem metody elementów
brzegowych, która umożliwia przewidywanie rozkładu pola akustycznego na podstawie geometrii
obiektów, warunków brzegowych charakteryzujących własności źródeł fali akustycznej oraz własności
obiektów rozpraszających fale i zestawu parametrów opisujących na przykład własności ośrodka, w
którym propaguje się fala akustyczna.
Zilustrowano także różnice pomiędzy rozkładami uzyskanymi za pomocą różnych pakietów
oprogramowania służącego do symulacji i danymi pochodzącymi z pomiaru. Proces przygotowania
symulacji komputerowej rozpoczyna się od zmierzenia geometrii modelowanego obiektu oraz określenia
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 25
właściwości akustycznych materiału, z którego jest on wykonany. Informacje te mogą posłużyć do
wykonania trójwymiarowej siatki punktów reprezentującej obiekt w przestrzeni trójwymiarowej.
Do wykonania tego typu modelu komputerowego konieczne jest posłużenie się programem
umożliwiającym konstrukcję i edycję siatek punktów lub oprogramowaniem typu CAD, które pozwalają
na uzyskanie modeli opisujących geometrię obiektu za pomocą prostszych kształtów geometrycznych.
W drugim przypadku konieczne jest posłużenie się dodatkowym oprogramowaniem, które wygeneruje
odpowiednią siatkę punktów na podstawie zadanych kształtów. Właściwości akustyczne materiału
pozwalają dobrać odpowiedni warunek brzegowy powiązany z siatką obiektu. Złożoność siatki punktów
jest kolejnym zagadnieniem wpływającym na jakość otrzymanych wyników. Powinna się ona cechować
się odpowiednim stopniem złożoności. Zbyt uproszczona siatka może stać się przyczyną błędów
wynikających z niespełnienia założeń twierdzenia Shannona o próbkowaniu. Zbyt złożona siatka może
narzucić za wysokie wymagania dotyczące ilości pamięci oraz mocy obliczeniowej komputerów, które
dokonują obliczeń.
Poprawność wyników otrzymanych za pomocą symulacji zweryfikowano poprzez porównanie
otrzymanych danych z wynikami pomiarów w polu swobodnym, w warunkach komory bezechowej. Jest
to etap walidacji modelu komputerowego, który pozwala na wychwycenie niedoskonałości siatki
obiektów biorących udział w obliczeniach, a także umożliwia dobór odpowiednich parametrów
charakterystycznych dla metody obliczeń takich, jak dokładność kwadratur numerycznych służących do
przybliżonego obliczania wartości całek występujących w równaniach metody elementów brzegowych.
Dobór tych parametrów jest także wynikiem kompromisu pomiędzy dokładnością symulacji a
szybkością obliczeń. Pomiar, będący podstawą dla procesu weryfikacji jakości modelu komputerowego,
został wykonany przy użyciu sondy natężeniowej typu p-v, która umożliwia rejestrację sygnałów
ciśnienia oraz trzech składowych wektora prędkości akustycznej cząstek ośrodka. Wielkości te mogę
następnie być przeliczone w taki sposób, aby otrzymać trzy składowe wektora natężenia dźwięku w
punkcie pomiaru. Pomiary natężeniowe mogą zostać wykorzystane do określania, na podstawie
uzyskanych rozkładów pola akustycznego, parametrów dyfuzora takich, jak współczynnik dyfuzyjności
czy współczynnik rozproszenia.
Symulacje odzwierciedlające zjawiska poznawane za pomocą tego typu pomiarów mogą posłużyć
do przewidywania cech ustrojów akustycznych, a także do komputerowego wspomagania projektowania
ustrojów akustycznych dostosowanych do konkretnych warunków otoczenia.
17. Metoda uwzględniania dynamiki statku w procesie
wyznaczania bezpiecznej trajektorii
Agnieszka Lazarowska
email: [email protected]
W ramach tego referatu planowane jest zaprezentowanie metody uwzględniania własności
dynamicznych statku w algorytmach wyznaczania bezpiecznej trajektorii statku. Wyznaczanie
bezpiecznej trajektorii statku w sytuacji kolizyjnej na morzu jest zadaniem skomplikowanym,
wymagającym uwzględnienia wielu ograniczeń. Do ograniczeń tych zaliczamy statyczne ograniczenia
nawigacyjne w postaci lądów, mielizn, kanałów, torów wodnych, a także dynamiczne przeszkody,
którymi są występujące w obszarze obserwacji inne statki. Ograniczeniem tego procesu jest także
wymaganie zgodności wyznaczonej trajektorii statku z przepisami Międzynarodowego Prawa Drogi
Morskiej. Ponadto w procesie tym należy uwzględniać nie tylko kinematykę, ale również własności
dynamiczne statku.
Dynamika statku w procesie manewru zmiany kursu zależy od aktualnego kąta wychylenia płetwy
steru, aktualnej prędkości postępowej statku oraz stanu załadowania. W referacie autorka zamierza
przedstawić metodę uwzględniania dynamiki statku w algorytmach wyznaczania bezpiecznej trajektorii
statku. Własności dynamiczne statku uwzględniane są w algorytmie w postaci tzw. czasu manewru,
który przyjmuje wartości z zakresu od 5 do 150 sekund dla statku o nośności 10 000 t. W pracy
przedstawiona zostanie metoda tworzenia rodziny charakterystyk przedstawiających zależność czasu
manewru w funkcji zmiany kursu () dla różnych wartości kąta wychylenia płetwy steru oraz dla
różnych prędkości postępowych statku. Zostaną przedstawione charakterystyki otrzymane dla
wybranych typów statków np. kontenerowca, zbiornikowca. Do określania własności dynamicznych
26 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
danej jednostki wykonywane są w warunkach eksploatacyjnych próby manewrowe, do których należą
próba cyrkulacji, próba wężowa Kempfa oraz próba spiralna Dieudonne’a. Próba cyrkulacji polega na
wykonaniu zwrotu o 360º przy użyciu określonego wychylenia płetwy steru. W wyniku wykonanej
próby otrzymuje się informacje dotyczące zwrotności danej jednostki, między innymi takie jak taktyczna
średnica cyrkulacji oraz średnica cyrkulacji ustalonej. Taktyczna średnica cyrkulacji to odległość
pomiędzy kursem początkowym, a kursem statku po wykonaniu zwrotu o 180º, natomiast średnica
cyrkulacji ustalonej to średnica okręgu wyznaczonego przez środek ciężkości statku w fazie cyrkulacji
ustalonej.
W przeprowadzonych badaniach własności dynamiczne przykładowych typów statków obliczane
są przy wykorzystaniu oprogramowania MATLAB. Na początku wykonywane są obliczenia próby
cyrkulacji dla wybranej początkowej prędkości postępowej statku oraz dla danego kąta wychylenia
płetwy steru, w wyniku których otrzymywana jest wartość taktycznej średnicy cyrkulacji oraz średnicy
cyrkulacji ustalonej statku. Następnie obliczana jest prędkość kątowa zwrotu statku oraz wyznaczane są
charakterystyki czasu manewru w funkcji zmiany kursu. W dalszej części referatu przedstawiony
zostanie sposób uwzględniania czasu manewru w obliczeniach realizowanych przez opracowany przez
autorkę algorytm wyznaczania bezpiecznej trajektorii statku. Implementacja czasu manewru w
algorytmie wyznaczania bezpiecznej trajektorii statku polega na odczytaniu dla danej prędkości
postępowej statku i danej zmiany kursu z utworzonej wcześniej tabeli odpowiedniej wartości czasu
manewru dla założonej wartości kąta wychylenia płetwy steru. Następnie odczytana wartość czasu
manewru jest uwzględniana przy ocenie spełnienia przez wyznaczoną trajektorię ograniczeń procesu
sterowania.

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 27
18. Analiza skuteczności i złożoności obliczeniowej metod
usuwania trendu z danych pomiarowych
Łukasz Lentka, Janusz Smulko
W pracy przedstawiono sposób przetwarzania danych pomiarowych w celu usunięcia
wolnozmiennej składowej trendu występującego w rejestrowanych przebiegach. Porównano kilka często
stosowanych w tym celu metod pod kątem ich złożoności obliczeniowej jak i skuteczności w usuwaniu
trendu. Pokazano wpływ tych procedur na rozkład prawdopodobieństwa wartości chwilowych oraz
przebieg gęstości widmowej mocy.
W ogólności operację usuwania trendu możemy traktować jako filtrację górnoprzepustową danych
pomiarowych. W celu usunięcia trendu można użyć filtru górnoprzepustowego (analogowego lub
cyfrowego) już na etapie akwizycji danych pomiarowych. Jednakże często mamy do czynienia z
danymi, w których składowa trendu jest potrzebna do przeprowadzania innych analiz i nie może być
usunięta na etapie rejestracji danych pomiarowych. Ponadto, może mieć charakter niestacjonarny i
metody filtracji górnoprzepustowej nie będą skuteczne. W takich przypadkach należy rozważyć inne,
często bardziej zaawansowane metody. Skuteczność i złożoność obliczeniowa takich metod zależy
istotnie od charakteru usuwanego trendu.
W pracy opisano procedurę usuwania średniej kroczącej (ang. Moving Average Removal – MAR),
metody o niskiej złożoności obliczeniowej, ale dającej zadowalające rezultaty w dużej liczbie
potencjalnych zastosowań. Rozważono usuwanie trendu przez dopasowanie wielomianem
odpowiedniego stopnia do analizowanych danych pomiarowy. Procedura ta może być powtarzana
kilkukrotnie, nawet ze zwiększaniem stopnia wielomianu przy każdym z kroków, aż do uzyskania
przebiegu, w którym usunięto składową trendu. Część pracy poświęcono prezentacji bardziej złożonych
obliczeniowo metod, które zostały rozwinięte dopiero w ostatnich latach i wymagają znacznie bardziej
intensywnych obliczeń.
19. Analiza rozkładu pojazdów w ruchu ulicznym na podstawie
zarejestrowanego sygnału fonicznego
Karolina Marciniuk, Bożena Kostek
email: [email protected], [email protected].
Wzrost natężenia ruchu drogowego wpływa znacząco na pogorszenie się stanu zdrowia
mieszkańców dużych miast. Potrzeba kontroli i przeciwdziałania zanieczyszczeniu hałasem narzucane są
zarówno przez ustawy Ministerstwa Ochrony Środowiska, jak i dyrektywy Rady Unii Europejskiej.
Akustyczny nadzór nad miastami służy nie tylko do kontroli poziomu hałasu, ale jest również stosowany
do wykrywania niebezpiecznych zdarzeń takich, jak wybuchy, wystrzał z pistoletu czy wołanie o
pomoc. Niektóre systemy sterowania ruchem wprowadzają awaryjne zarządzanie sygnalizacją świetlną
w przypadku sygnału dźwiękowego służb publicznych (CSE, WCEM, Nagpur (Maharashtra), Indie).
W prezentowanych badaniach przedstawiono wpływ przejazdu pojazdu na charakterystykę sygnału
fonicznego rejestrowanego w systemie mikrofonowym stereofonicznym w bliskiej odległości od drogi.
Algorytm zliczania pojazdów, polegający na analizie zmian w zarejestrowanym sygnale fonicznym,
wspomagany jest obserwacją wystąpienia zdarzenia w sygnale wizyjnym. Uzyskane wyniki porównane
są z danymi uzyskiwanymi z pętli indukcyjnych zamontowanych na Gdańskich drogach na potrzeby
systemu TRISTAR.
Analiza sygnału fonicznego z zapisem przejazdu pojazdów pozwala na określenie takich cech, jak
kierunek jazdy, prędkość czy typ pojazdu. Jednocześnie analiza czasowa i częstotliwościowa pozwala na
ekstrakcję parametrów stosowanych w automatycznej klasyfikacji pojazdów. Na sygnał foniczny
przejeżdżającego pojazdu składa się kilka zjawisk, przy niskich prędkościach dominuje
niskoczęstotliwościowy dźwięk silnika. Przy wyższych częstotliwościach dominuje efekt kontaktu
opony z jezdnią, który wraz z mało znaczącym w mieście efektem aerodynamicznym wprowadza
zmiany w paśmie średnich i wysokich częstotliwości analizowanego sygnału. Są to kolejne wskaźniki
uwzględniane w tworzonym wektorze parametrów.

28 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
Parametryzacja sygnału fonicznego jest pierwszym etapem procesu klasyfikacji, w kolejnych
istotna jest optymalizacja proponowanego wektora parametrów, a także zastosowany algorytm
decyzyjny. Głównym celem poszczególnych etapów procesu decyzyjnego jest wykrycie zdarzenia w
dźwięku tła akustycznego otoczenia drogi, a także ustalenie typu pojazdu, tj. stosując klasyfikację:
motocykl, pojazd lekki, pojazd ciężki.
Inną metodą zliczania pojazdów w ruchu drogowym jest stosowanie pasywnych detektorów
akustycznych. Jednak głównym problemem jest w tym przypadku znalezienie odpowiedniego
kompromisu pomiędzy jakością systemu pomiarowego a jego ceną. Większość pasywnych detektorów
akustycznych stanowią czujniki, które zbudowane są z macierzy mikrofonów (wykorzystujących
nawet 150 sztuk), stąd cena pojedynczego w pełni funkcjonalnego układu pomiarowego stanowi
niekiedy znaczącą przeszkodą w ich stosowaniu. Rozwiązaniem alternatywnym jest zastosowanie
typowych mikrofonów pomiarowych, wspomaganych np. tanimi urządzeniami do detekcji sygnałów
sejsmicznych (N. Evans, Department of Electronics, University of York). W referacie zawarta zostanie
dyskusja poszczególnych rozwiązań w kontekście ich funkcjonalności, zalet oraz wad.
20. Stanowisko do pomiaru szerokości krawędzi narty
Konrad Michalski, Anna Golijanek-Jędrzejczyk
email: [email protected]
Regeneracja sprzętu narciarskiego zapewnia nie tylko niezapomniane doznania na stoku, ale przede
wszystkim bezpieczeństwo. Serwisowanie nart, poza smarowaniem, to w głównej mierze ostrzenie
krawędzi na specjalistycznych szlifierkach. Poprawne wykonanie tej usługi polega na naostrzeniu
krawędzi przy jednoczesnej minimalizacji ilości zebranego z narty materiału, co nie jest zadaniem
trywialnym, gdyż typowa szerokość narty jest rzędu 1,5 mm.
W referacie zaprezentowane zostanie specjalistyczne stanowisko zaprojektowane dla potrzeb
serwisu nart (zarówno od strony sprzętowej jak i programowej). Zbudowany system pomiarowy
umożliwia jednoczesny pomiar szerokości krawędzi narty w zakresie pomiarowym od 0,1mmm do 2
mm, zapewniając analizę szerokości krawędzi narty na ok. 80% jej długości.
W referacie przedstawione zostaną przykładowe wyniki testów nart (o różnym stopniu zużycia)
uzyskane na zaprojektowanym stanowisku.
21. System wspomagający diagnostykę czerniaka złośliwego przy pomocy metod
przetwarzania obrazu i algorytmów inteligencji obliczeniowej
Agnieszka Mikołajczyk, Michał Grochowski
email: [email protected], [email protected]
Nowotwory skóry są najczęściej spotykanymi nowotworami na świecie. Czerniaki złośliwe
stanowią od około 5 do 7% wszystkich nowotworów złośliwych skóry u człowieka.
Ich wczesne zdiagnozowanie jest kluczowym czynnikiem w późniejszej pomyślnej terapii. Niniejsza
praca zawiera propozycję rozwinięcia i zautomatyzowania najważniejszej metody diagnozowania
czerniaków, metody ABCD Stoltza. W artykule przedstawiono koncepcję
i implementację zautomatyzowanego systemu do diagnostyki znamion skórnych pod kątem wykrycia
czerniaka złośliwego. Zaproponowano nową, rozszerzoną wersję metody dermatoskopowej ABCD i
zaimplementowano niezbędne algorytmy w środowisku Matlab. Główne cechy znamion skórnych o
charakterze nowotworowym są wyszukiwane automatycznie przy pomocy metod przetwarzania obrazu
oraz opracowanych algorytmów. Decyzja na temat rozpoznania lub nie czerniaka złośliwego
podejmowana jest przez sztuczną sieć neuronową, wnioskującą na podstawie wskaźników
wyznaczonych na etapie przetwarzania obrazów.
Omawiany system wspomagania decyzji może służyć jako narzędzie usprawniające pracę lekarzy
pierwszego kontaktu lub jako system umożliwiający szybkie samobadanie skóry przez pacjentów.
Aplikację przetestowano na 126 znamionach skórnych. Uzyskano czułość równą 98% oraz swoistość
równą 73%, co jest bardzo dobrym osiągnięciem.
22. Computer-aided analysis of measured low-coherence signals frombiological samples
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 29
Marcin Mrotek, Jerzy Pluciński
email: [email protected]
This presentation describes a method for computer-aided analysis of signals measured
noninvasively from biological samples using a low-coherence Fabry-Pérot interferometer. Optical
methods have found extensive use in the industry, as they do not require contact between the
measurement probe and the measured object. Low-coherence interferometry removes the uncertainty of
measurements longer than one wavelength inherent to solutions based on lasers.
The measurement setup consists of: an optical processor (Optical Spectrum Analyzer Ando
AQ6319 with wavelength resolution of 1 pm, wavelength accuracy of ±50 pm, and close-in dynamic
range of 60 dB), superluminescent diode with Gaussian spectral intensity distribution (Superlum
Broadlighter S1300-G-I-20, with the following optical parameters: central wavelength λ₀ = 1290 nm and
bandwidth Δλ = 50 nm), and a low-finesse fiber-optic Fabry-Pérot interferometer. Experimental results
showed that the measurement set-up provided good quality data while maintaining simple configuration,
with an immunity for changes of the optical polarization.
A computer model of this setup was developed for the purpose of predicting the properties of
measured signals. The model comprises the change of mode field diameter in a single-mode optical fiber
as a function of wavelength, changes of the beam parameters inside the interferometer (including waist
diameter, phase shift due to the Gouy effect, and the radius of curvature), and changes of refractive index
and absorption coefficient of the measured medium. Numerical simulations using this model were
conducted to examine the relationship between the parameters of the measurement setup and the shape
of the output signal, including the positions and values of the maxima of the measured spectrum.
The main challenge encountered while designing the computer-based part of the setup was ensuring
that it is immune to noise that is inevitably included in the signal, while remaining sensitive to
components of the signal carrying meaningful information. Various solutions were evaluated on real and
simulated signals before the optimal filtering and peak detection method was determined.
23. System zabezpieczenia przed kradzieżą pomieszczeń techniką RFID
Bartosz Mudlaff, Sylwia Babicz, Janusz Smulko
Głównym wymaganiem stawianym przed systemami antykradzieżowymi jest pozostawienie
swobodnego kontaktu potencjalnego klienta z prezentowanym towarem. W tym celu, systemy
antykradzieżowe instalowane w obiektach handlowych, coraz częściej implementują w sobie
funkcjonalność bezprzewodowej techniki identyfikacji - RFID (ang. Radio-Frequency IDentification).
Zapotrzebowanie na systemy antykradzieżowe wzrasta nie tylko w obiektach handlowych. Podczas zajęć
laboratoryjnych na uczelniach wyższych, często zachodzi potrzeba udostępnienia drogich urządzeń i
narzędzi laboratoryjnych studentom, w sposób umożliwiający im bezpośredni i zarazem swobodny
kontakt ze sprzętem. W takiej sytuacji pojawia się potrzeba powstania systemu, który wspomógłby
nauczyciela prowadzącego zajęcia w monitorowaniu stanu wyposażenia laboratorium.
Celem prezentowanego projektu było opracowanie koncepcji i fizyczna realizacja systemu
alarmowego, zabezpieczającego elementy wyposażenia pomieszczenia laboratoryjnego przed kradzieżą.
Do głównych wymagań stawianych przed systemem należało: wykorzystanie techniki bezprzewodowej
identyfikacji (RFID) oraz umożliwienie swobodnego korzystania z obiektów podlegających ochronie
antykradzieżowej. Opracowanie systemu wymagało wykorzystania wielu narzędzi wspomagających
komputerowe projektowanie urządzeń elektronicznych. W projekcie wykorzystano mikrokontrolery z
rodziny AVR firmy Atmel, które oprogramowano w języku C, z wykorzystaniem darmowego
środowiska programistycznego Eclipse, wzbogaconego o rozszerzenie Atmel-Toolchain i kompilator
avrgcc. Program nadzorujący pracę systemu, przeznaczony na komputer PC, został napisany w języku
Java i pracuje pod kontrolą środowiska Wirtualnej Maszyny Java (ang. JRE – Java Runtime
Environment). W artykule zarysowano charakterystykę techniki RFID i omówiono najważniejsze
zagadnienia związane z systemami alarmowymi, przedstawiając i charakteryzując podstawowe elementy
i rodzaje tego typu systemów. Na podstawie analizy rynku, opracowano własną koncepcję systemu
alarmowego, implementującego technikę RFID. Przedstawiono założenia projektowe, koncepcję oraz

30 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
dokładny sposób wykonania fizycznego projektu prototypu systemu antykradzieżowego,
przeznaczonego do ochrony wyposażenia sali laboratoryjnej. Opisano wszystkie działania, które podjęto
by zbudować system alarmowy od podstaw, wykorzystując technikę RFID. Przedstawiono przebieg
testów działania zrealizowanego sprzętu oraz sposób obsługi oprogramowania. Zilustrowano
zaprojektowaną część sprzętową, a także zamieszczono widok graficznego interfejsu użytkownika
wykonanej aplikacji komputerowej. Określono najważniejsze parametry techniczne systemu oraz
opisano działania, które należy podjąć aby udoskonalić projekt i kontynuować pracę nad nim w
przyszłości.
24. Wykorzystanie modelu robota- człowieka ROBOWISDOM
w dydaktyce techniki cyfrowej
Krystyna Maria Noga email: [email protected]
W Katedrze Automatyki Okrętowej Akademii Morskiej w Gdyni powstało sporo modeli
sterowanych cyfrowo, które są wykorzystywane w laboratorium Techniki Cyfrowej. Znaczna część z
nich została zaprezentowana w ramach poprzednich edycji seminarium „Zastosowanie Komputerów w
Nauce i Technice”, przykładowo przedstawiono model robota kroczącego, skarbca, przenośnika
taśmowego, wielozadaniowego pojazdu, wciągarki okrętowej, domu mieszkalnego. W laboratorium do
nauki cyfrowego sterowania wykorzystywane są także modele w postaci dziecięcych zabawek,
przykładowo model pojazdu – czołgu, pojazdu strażackiego, koparki, sztaplarki, dźwigu, które zostały
odpowiednio przystosowane do potrzeb dydaktyki. Bardziej zaawansowanym modelem jest
autonomiczny robot – człowiek ROBOWISDOM. W artykule zostaną przedstawione kilkuletnie
doświadczenia wynikające z eksploatacji dwóch robotów, które cieszą się wśród studentów znacznym
zainteresowaniem. Wynika to przede wszystkim z dużych możliwości rozbudowy algorytmu sterowania,
wszystko dzięki 10 silnikom, przy czym dwa z nich odpowiadają za poruszanie nóg, dwa kolejne za
kołysanie się robota w lewo i prawo, a kolejne sześć za ruch ramion. W artykule zostanie także
omówiona budowa robota, możliwości i ograniczenia oraz uwagi wynikające z wykorzystania w
dydaktyce. Do sterowania modelem robota – człowieka z wykorzystaniem transmisji podczerwieni
studenci wykorzystują zestaw dydaktyczny DE_2 z układem programowalnym FPGA typu Cyclone
firmy Altera oraz język programowania sprzętu VHDL i środowisko Quartus. Do sterowania robotem
wykorzystywane są przyciski zestawu DE_2. Innym, alternatywnym rozwiązaniem jest sterowanie z
wykorzystaniem sieci Ethernet. Wówczas jako układ pośredniczący pomiędzy siecią a robotem
odbierającym sygnały sterujące za pomocą podczerwieni studenci wykorzystują platformę Arduino
Yun. Taka konfiguracja pozwala na sterowanie robotem z dowolnego miejsca na Ziemi poprzez sieć
Internet, pod warunkiem, że sieć, do której dołączono Arduino Yun posiada dostęp do Internetu i
Arduino Yun otrzyma publiczny adres IP, lub na jego port 80 (WWW) zostanie przekierowany port z
routera posiadającego publiczne IP. W tym przypadku Arduino Yun pełni funkcję pilota, sterowanie
następuje za pomocą przeglądarki internetowej, a nie za pomocą przycisków.
25. Przykłady przetwarzania dźwięku w środowisku Vissim
Krystyna Maria NOGA email: [email protected]
Współczesna wiedza z zakresu przetwarzania i przesyłania sygnałów jest szeroko stosowana
między innymi we współczesnej technice audio. Można się z nią spotkać zarówno przy projektowaniu
klasycznych instrumentów takich jak fortepian czy organy, jak również przy tworzeniu
zaawansowanych torów audio. Zagadnienia przetwarzania dźwięku stanowią jedno z zagadnień
omawianych na zajęciach wykładowych i laboratoryjnych z przedmiotu Cyfrowe Przetwarzanie i
Przesyłanie Sygnałów. W artykule zostaną przedstawione możliwości programu Vissim w procesie
tworzenia i obróbki dźwięku, ze szczególnym uwzględnieniem symulacji efektów brzmieniowych.
Zostaną między innymi omówione symulacje prezentujące echo wielokrotne, echo pojedyncze, echo o
zmiennym czasie opóźnienia, pogłos. Ponadto zostaną przedstawione przykładowe symulacje
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 31
przeznaczone do generowania przebiegów dźwiękowych o zadanych parametrach niezależnie dla kanału
lewego oraz prawego, np. o różnej częstotliwości fali nośnej, głośności, różnym wzmocnieniu szumu,
kształcie przebiegu sygnału nośnego lub rodzaju szumu. Wygenerowany przebieg o zadanych
parametrach odsłuchiwany na słuchawkach stereofonicznych powoduje powstanie zjawiska dudnień
różnicowych, co przykładowo symuluje pracę mózgu. Wirtualny układ przedstawia duże możliwości
pracy z dźwiękiem, między innymi generowanie sygnałów, przetwarzanie oraz wizualizację. Dzięki
wykorzystaniu elementów audio input oraz audio output możliwa jest praca z dźwiękiem
wprowadzanym z wejścia liniowego, np. z mikrofonu lub z pliku muzycznego oraz wyprowadzanie
sygnału na głośniki czy zapisywanie do pliku muzycznego. W artykule zostanie także zaprezentowany
wirtualny korektor dźwięku, który jest układem służącym do tłumienia lub wzmacniania określonych
częstotliwości dźwięku. Znajduje on szerokie zastosowanie w obróbce dźwięku zarówno w układach
rejestrujących jak i w odsłuchu.
Mimo, iż Vissim nie jest programem przeznaczonym do typowych zadań związanych z torem
audio to w jego środowisku można w bardzo łatwy sposób modelować i symulować różnego rodzaju
tory syntezy oraz obróbki sygnałów akustycznych. Uzyskane efekty można zapisywać w postaci plików
muzycznych lub analizować na wykresach. Niestety ze względu na duże zapotrzebowanie na moc
obliczeniową użycie programu Vissim jako narzędzia do pracy nad dźwiękiem w czasie rzeczywistym
nie jest praktycznie możliwe.
26. System pomiarowy do urządzenia typu stepper dedykowany do prób wysiłkowych
Marcin Ogielski, Anna Golijanek-Jędrzejczyk, mgr inż. Leszek Rafiński
Stepper to urządzenie umożliwiające przeprowadzenie prób wysiłkowych (m.in. testu Astrand'a -
Ryhming'a), dzięki którym wyznaczane są parametry związanych z wydolnością ludzkiego organizmu.
Tego typu testy przeprowadzane są w celu zaprogramowania intensywności treningu fizycznego u
sportowców, ale także u pacjentów kardiologicznych czy pulmonologicznych.
W referacie zostanie przedstawiony opracowany system pomiarowy dedykowany dla urządzenia
typu stepper, zarówno od strony sprzętowej jak i programowej. Zaprojektowany system pomiarowy
umożliwia dokładniejszą diagnostykę osoby wykonującej test, ponieważ rejestruje, wizualizuje i
pozwala śledzić na bieżąco (podczas przeprowadzania testu wysiłkowego) parametry związane z
wykonywanym ćwiczeniem. Pozwala on także na wprowadzenie i archiwizację podstawowych danych
osobowych oraz wyznaczenie parametrów wydolnościowych na podstawie wykonanego testu
wysiłkowego.
Przeprowadzone testy prototypu steppera wyposażonego w zaprojektowany system pomiarowy
potwierdziły, że uzyskany błąd względny pomiaru obciążenia nie przekraczał 3%.
27. Wind Resource Assessment and Energy Yield Prediction
For The Small Wind Farm on The Szubieniczne Hill
Michał Pacholczyk, Dariusz Karkosiński
email: [email protected], [email protected]
The goal of this study is to numerically assess the wind resource on the Szubieniczne Hill in order
to predict the annual energy production for planned small wind farm. The analyzed site is located close
to the Gdańsk University of Technology (GUT) campus, in complex urban environment additionally
surrendered by forested hills. The assessment is based on Computational Fluid Dynamics (CFD)
simulation which allows to evaluate wind energy potential on the entire area of interest. Simulations are
integrated with long-term local wind measurements from nearby meteorological mast located at the roof
of the GUT Electrical and Control Engineering Faculty. This study provides micro-scale wind energy
maps of the Szubienicze Hill and will help in identification of the optimal sitting for small wind turbines
at this location and cost-effectiveness evaluation.
The proposed paper will consist of:
1. Review of the methodologies and software packages used in industry for wind resource assessment,
challenges meet in the prediction of wind energy potential and state of the art measurement and
techniques used for this purpose.
32 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
2. Description of the Computational Fluid Dynamics methodology used in a study. The CFD
simulations are carried out using three-dimensional steady Reynolds averaged Navier-Stokes
RANS equations without heat transfer. Different turbulence models will be presented including shear
stress transport (SST) k-ε turbulence model used in computation. Simulation in the complex urban
environment will be discussed as well as modelling of the forest canopy methods. Software packages
utilized for creation of virtual model of the site and performance of the CFD computation will be
outlined. Especially Ansys Fluent software capabilities will be presented.
3. Case study of the Szubieniczne Hill description and results discussion. This section will include the
concept of the small power plant at the Szubieniczne Hill presentation, wind speeds and directions
measurement gathering and processing methods (23 month of measurement from 2008 to 2009),
virtual model of the site and volume elements grid presentation, demonstration of the CFD
simulation results as wind maps (mean wind speed, turbulence intensity, wind power density) at
specific heights and directions, discussion of the result and identification of potential wind turbines
locations, prediction of the annual energy production for proposed small wind turbines based on the
calculated wind speeds at the wind turbines locations, cost-effectiveness discussion, future works
proposal.
28. Przegląd metod pomiaru małych energii dla oceny układów
„Energy-harvesting” i systemów mikromocowych
Dariusz Palmowski, Grzegorz Lentka, Arkadiusz Hojka
email: [email protected]
Artykuł dotyczy tematyki pozyskiwania i wykorzystania energii dostępnej w otoczeniu do zasilania
układów mikromocowych (ang. Energy Harvesting). Pozyskanie i przetworzenie na energię elektryczna
innych form energii takich jak energia kinetyczna, energia cieplna, energia drgań mechanicznych lub
energia pola elektromagnetycznego umożliwia konstruowanie urządzeń niewymagających klasycznych
źródeł zasilania. System elektroniczny z pozyskiwaniem energii z otoczenia najczęściej zawiera 3
zasadnicze bloki: przetwornik energii dopasowany do dostępnego rodzaju energii, układ przetwarzania i
magazynowania oraz właściwy układ mikromocowy realizujący właściwą funkcjonalność (np. czujnik
pomiarowy z komunikacją bezprzewodową).
Główną trudnością w konstruowaniu urządzeń wykorzystujących zasilanie typu EH jest
oszacowanie rzeczywistego zapotrzebowania na energię zasilanego systemu mikromocowego oraz ilości
energii dostarczanej przez wybrany przetwornik w konkretnych warunkach pracy. Dokonanie bilansu
energetycznego i ocena sprawności narzuca konieczność pomiaru ilości energii na styku każdego z
trzech głównych bloków systemu mikromocowego. Jest to również narzędzie pozwalające
zoptymalizować konstrukcję systemu lub wykryć jego najsłabszy punkt. Ze względu na charakter pracy
poszczególnych bloków systemu oraz właściwości mierzonych sygnałów wykonanie takich pomiarów
najczęściej nie jest trywialne.
Zasadniczą część referatu zajmuje omówienie i porównanie metod pomiaru energii pobieranej
przez systemy mikromocowe oraz dostarczanej przez alternatywne źródła zasilania. Metody porównano
symulacyjnie oraz eksperymentalnie przy wykorzystaniu przykładowych układów Energy Harvesting
opartych o ogniwo fotowoltaiczne, ogniwo Peltiera (generator termoelektryczny) oraz piezoelektryczny
przetwornik drgań.
29. Sieciowy rozproszony system pomiarowy w laboratorium dydaktycznym
Beata Pałczyńska, Krystyna Maria Noga
[email protected], [email protected]
Referat prezentuje temat z dwóch perspektyw. Pierwsza pokazuje możliwości wykorzystania dla
celów dydaktycznych specjalistycznego narzędzia programistycznego zdecydowanie upraszczającego
oprogramowanie rozproszonego systemu pomiarowego (RSP). Druga przedstawia organizację systemu
pomiarowego, opartego na Technologii Zmiennych Współdzielonych w graficznym środowisku
LabVIEW.
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 33
Najczęściej stosowanym rozwiązaniem komunikacyjnym rozproszonych systemów pomiarowych
jest architektura typu klient – serwer. Daje ona duże możliwości nie tylko przestrzennego, ale także
funkcjonalnego rozproszenia systemu pomiarowego. Taka struktura aplikacji wymaga nietypowego
podejścia do oprogramowania RSP, które powinno uwzględniać różne uwarunkowania związane m.in. z
jednoczesnym wykorzystaniem procesorów różnego typu, zapewniać efektywne współdzielenie danych
przez te procesory, koordynację wszystkich węzłów rozproszonych jako jednego systemu, w tym
regulację czasową i synchronizację pomiędzy tymi węzłami a także integrować różne typy wejść/wyjść.
W środowisku LabVIEW takie wymagania spełnia struktura Technologia Zmiennych Współdzielonych,
która pozwala współdzielić dane przez różne procesory i kontrolery czasu rzeczywistego a także z
łatwością integrować do systemu inne urządzenia. W celu poprawnego działania systemu zmienne
sieciowe przypisane są do Systemu Zarządzania Zmiennymi Współdzielonymi (SVE). Oprogramowanie
SVE umożliwia przesyłanie zmiennych przez Internet.
Zaprezentowane w artykule stanowisko laboratoryjne, składające się z kilku węzłów
z dostępem do sieci komputerowej, pokazuje możliwości zastosowania tego oprogramowania. Funkcje
procesu pomiaru oraz sterowania i kontrola pomiaru zostały rozproszone i są wykonywane w różnych
węzłach systemu pomiarowego. Celem ćwiczenia laboratoryjnego jest przedstawienie studentom
wszystkich etapów procesu projektowania RSP. Każda aplikacja
w węźle to osobny LabVIEW Project, za pomocą którego administruje się wszystkimi plikami,
związanymi z aplikacją rozproszoną np. plikami źródłowymi przyrządów wirtualnych, dokumentacją
projektu, plikami pomocniczymi, kodem zewnętrznym, plikami danych
i konfiguracjami sprzętowymi. Możliwości wykorzystania zaprojektowanego systemu
w laboratorium dydaktycznym mogą być znacznie rozszerzone dzięki elastycznemu dołączeniu do
projektu dodatkowych węzłów.
30. Implementacja wspomaganych komputerowo narzędzi statystycznych
do poprawy niezawodności maszyn i urządzeń na linii produkcji półfabrykatów
Jan Piesik
email: [email protected]
W referacie zostaną przedstawione podstawy i założenia teoretyczne wraz z prezentacją propozycji
rozwiązań w zakresie poprawy niezawodności oraz minimalizowania wpływu niewłaściwych zachowań
człowieka na niezawodność i bezpieczeństwo linii produkcyjnej. Ten referat jest logiczną kontynuacją
uprzednio wymienionego referatu, gdzie zostanie przedstawione wdrożenie tego systemu na linię
produkcji półfabrykatów do produkcji opon.
Referat ma na celu pokazanie skutecznych, relatywnie tanich oraz łatwych w implementacji w
różnych środowiskach przemysłowych narzędzi do poprawy niezawodności maszyn, bezpieczeństwa
oraz pośrednio poprawy wyników jakościowych produkowanych produktów.
W pierwszym rozdziale zostaną przywołane po krótce podstawy teoretyczne rozwiązania oraz
podstawy statystyczne narzędzi wykorzystanych we wdrażanym systemie. Drugi rozdział to opis obiektu
na którym to rozwiązanie zostanie wdrożone oraz opis oczekiwań stawianych przed systemem. W
trzecim rozdziale zostanie zaprezentowane wdrożenie rozwiązania zarówno pod względem sprzętowym
jak i oprogramowania. Rozdział czwarty to prezentacja uzyskanych wyników. Rozdział piąty to
podsumowanie wyników i propozycje rozbudowy systemu.
31. Zastosowanie metod statystycznych do analizy zdarzeń nienormalnych
oraz oceny niezawodności i bezpieczeństwa linii produkcyjnej
z uwzględnieniem czynników ludzkich
Jan Piesik, Kazimierz T. Kosmowski
email: [email protected], [email protected],
W następstwie rosnących wymagań w zakresie produktywności maszyn i wymagań
bezpieczeństwa, redukcji kosztów, zadeklarowanych między innymi przez międzynarodowe normy IEC
61508 , IEC 62061 i ISO 13849 przemysł został zmuszony do znalezienia optimum pomiędzy
wymaganiami ekonomicznymi i akceptowalnym poziomem ryzyka w zakresie bezpieczeństwa.
Nowoczesne fabryki wyposażone w skomputeryzowane procesy i rozbudowane narzędzia diagnostyczne
34 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
często nie wykorzystują wszelkich informacji, które są zbierane z poziomu sprzętowego. Również
niektóre z relacji pomiędzy zdarzeniami są często pomijane lub zaniedbywane.
W referacie zostanie przedstawione nowe podejście do zwiększenia niezawodności maszyn
poprzez predykcyjną analizę danych oraz minimalizację prawdopodobieństwa błędów człowieka.
W pierwszym rozdziale zostaną przedstawione wymagania odnośnie niezawodności maszyn i
urządzeń. Zaprezentowane zostaną również narzędzia służące predykcji awarii oraz po krótce
scharakteryzowane generacje utrzymania ruchu które wnosiły wkład w rozwój tych narzędzi. W
kolejnym rozdziale zostaną opisane metody analizy niezawodności człowieka.
W trzecim rozdziale przedstawione zostaną metody statystyczne stosowane w systemach
komputerowych do predykcji zdarzeń oraz przedstawione narzędzia do obróbki danych typu ,,BIG
DATA”
W czwartym rozdziale referatu zostanie zaprezentowana propozycja kompletnego systemu do
obróbki danych, ich analizy oraz predykcji uszkodzeń i defektów oraz predykcji usterek z przyczyn
operatora linii ,wykonywanych przez bazujący na statystycznych metodach predykcji system
komputerowy.
W kolejnym artykule zostanie zaprezentowane wdrożenie omawianego narzędzia w warunkach
przemysłowych.
32. Kierunkowe układy detekcji VHF/UHF dla lokalizacji źródeł wyładowań
niezupełnych w liniach napowietrznych i urządzeniach stacji elektroenergetycznych
Józef Roehrich, Paweł Zydroń, Michał Bonk, Łukasz Fuśnik
email: [email protected], [email protected]
Współczesne wymagania dotyczące niezawodności dostaw energii elektrycznej powodują
konieczność prowadzenie badań diagnostycznych i monitorowania poprawności działania pracujących
urządzeń elektroenergetycznych. Występujące defekty linii napowietrznych oraz urządzeń stacji
elektroenergetycznych, charakteryzujące się podwyższeniem wartości lokalnego natężenia pola
elektrycznego ponad wartość krytyczną powoduję występowanie wyładowań niezupełnych, w różnych
ich formach. Pozwala to zastosować, w celach wykrywania i lokalizowania defektów, metody antenowe
z detekcją szerokopasmową, w zakresach VHF/UHF. W referacie przedstawione będą wyniki badań
laboratoryjnych skonstruowanych układów detekcji wyładowań z antenami kierunkowymi. Badania
eksperymentalne będą dotyczyć wybranych defektów modelowych: wyładowań ulotowych, wyładowań
iskrowych w mikroszczelinach powietrznych oraz łuków częściowych na powierzchniach izolatorów.

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 35
33. Metoda analizy i oceny ryzyka potencjalnych zdarzeń zagrażających
w projektowaniu systemu detekcji gazów wybuchowych w obiektach przemysłowych
Ireneusz Rogala, Kazimierz T. Kosmowski
W celu zmniejszenia ryzyka związanego z możliwością wybuchu gazów tworzących atmosferę
wybuchową stosuje się systemy detekcji gazów. Wyróżnia się systemy stacjonarne i detektory osobiste.
Systemy stacjonarne mają za zadanie wykryć sytuację zagrożenia, związaną z wystąpieniem atmosfery
potencjalnie wybuchowej, co ma związek nie tylko z możliwymi nieszczelnościami instalacji, ale
również ze skutecznością funkcjonowania systemu wentylacji. Celem jest zmniejszenie skutków
zdarzenia zagrażającego, a szczególnie redukcji ryzyka wybuchu, m.in. poprzez odpowiednie
ostrzeżenie i uniemożliwienie przebywania osób w miejscach zagrożonych wybuchem.
Systemy te powinny być wykonane zgodnie ze standardami przemysłowymi, ale mogą być również
zaprojektowane zgodnie z wymogami bezpieczeństwa funkcjonalnego z określonym poziomem
nienaruszalności bezpieczeństwa SIL. Dokonując analizy i oceny ryzyka związanego z zagrożeniem
wybuchu można uzyskać istotną poprawę stanu bezpieczeństwa poprzez właściwy dobór systemów
detekcji gazów wybuchowych, posługując się odpowiednią metodyką, opartą nie tylko na zasadach
dobrej praktyki, ale również metodach analizy i oceny ryzyka. W artykule zostanie przedstawiony
przykład analizy ryzyka i doboru urządzeń systemu detekcji gazów, z uwzględnieniem określenia
wymaganego poziomu SIL i weryfikacji tego poziomu dla przykładowego systemu detekcji.
Przedyskutowane będą uzyskane wyniki w kontekście stosowania systemów detekcji gazów w
przemyśle.
34. Rozproszony system wieloagentowy wspomagający
projektowanie wybranych układów sterowania
Przemysław Spychalski, Ryszard Arendt
email: [email protected], [email protected]
Projektowanie układów sterowania wiąże się z doborem odpowiedniej struktury (topologii) oraz
elementów składowych. Spełnienie wymagań statycznych przez elementy składowe nie zapewnia jednak
optymalnych właściwości dynamicznych. Jedną z metod oceny dynamiki projektowanego układu jest
budowanie prototypów, strojenie regulatorów i pomiar uzyskanych parametrów. Metoda iteracyjna może
być jednak bardzo kosztowna. Inną metodą jest zastosowanie drogi analitycznej polegającej na
utworzeniu modeli matematycznych elementów i dobór parametrów w badaniach symulacyjnych.
Zadania projektowe są trudne do sformalizowania, dlatego coraz częściej do ich rozwiązania
wykorzystuje się algorytmy sztucznej inteligencji.
W referacie przedstawiony zostanie rozproszony system wieloagentowy do wspomagania
projektowania wybranych układów sterowania. Zaimplementowany system składa się ze
specjalizowanych, niezależnych programów komputerowych (agentów), które poprzez realizację
wewnętrznych algorytmów oraz wzajemną komunikację rozwiązują określone zadania projektowe.
Realizacja zadań projektowych wymaga dużych mocy obliczeniowych, dlatego centralizacja
algorytmów w obrębie jednej jednostki sprzętowej nie była by dobrym rozwiązaniem. System
wieloagentowy został tak skonstruowany, aby działał w środowisku sieciowym, co umożliwia
dekompozycje procesu projektowania pomiędzy wiele komputerów i zrównoleglenie obliczeń.
Utworzony system składa się z agenta głównego (Master), który nadzoruje proces projektowania. Master
zleca decyzje projektowe agentowi ekspertowemu bazującemu na oprogramowaniu Exsys. Obliczenia
statyczne i dynamiczne realizowane są natomiast przez agenta symulacyjnego, który korzysta ze
środowiska Matlab Simulink.
Zaproponowany system oparty został o Uniwersalną Platformę Wieloagentową UMAP oraz
zaimplementowany w języku C# z wykorzystaniem .NET Framework. Komunikacja pomiędzy
poszczególnymi jednostkami agentowymi zrealizowana została w oparciu o komunikaty w formacie
XML oraz obsługę gniazd sieciowych (ang. Socket). System zgodny jest ze specyfikacją FIPA (ang.
Foundation for Intelligent Physical Agents). Rezultatem działania systemu jest dobór odpowiedniej

36 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
topologii układu sterowania, jego elementów składowych, przeprowadzenie badań symulacyjnych wraz
z optymalizacją parametrów oraz ocenę przydatności otrzymanego rozwiązania projektowego.
35. Głowica do pomiaru szumów diod LED w szerokim zakresie prądów
Barbara Stawarz-Graczyk, Damian Sprawka
email: [email protected]
W artykule zostaną zaprezentowany opis stanowiska badawczego do pomiarów szumów diod LED
w szerokim zakresie prądów diody wynoszących ID = 2, 5, 10 mA. Przedstawione zostaną wyniki
pomiarów oraz wnioski.
36. Komputerowe stanowisko pomiarowe do analizy sygnałów
radiokomunikacyjnych rejestrowanych w szerokim paśmie
Ryszard Studański
email: [email protected]
Współcześnie tendencją jest stosowanie technologii radia programowalnego do tworzenia i badania
nowoczesnych technik transmisji danych w systemach bezprzewodowych. W artykule zostanie
przedstawione stanowisko laboratoryjne zbudowane z modułów aparatury pomiarowej umożliwiające
prowadzenie analizy sygnałów radiokomunikacyjnych w rzeczywistym środowisku propagacyjnym.
Podstawowe bloki stanowiska to:
- zestaw anten odbiorczych wraz ze wzmacniaczami niskoszumnymi;
- odbiorniki szerokopasmowe, przemienniki częstotliwości;
- karty przetworników analogowo – cyfrowych;
- komputery wraz z kartami GPU;
- pamięci dyskowe o łącznej pojemności 48TB;
- konsola jako interfejs do sterowania pracą stanowiska;
- wektorowe generatory sygnałowe wykorzystywane jako źródła sygnałów zmodulowanych;
- oscyloskop cyfrowy i wektorowy analizator widma stanowiące dodatkowe wyposażenie pomiarowo
badawcze.
Uniwersalność tego stanowiska pozwala na prowadzenie oryginalnych badań. Między innymi
zapewnia wykrywanie sygnałów z bezpośrednim rozpraszaniem widma za pomocą ciągów
pseudoprzypadkowych, gdy w punkcie prowadzonej analizy moc tych sygnałów jest mniejsza niż
szumu. Umożliwia wyznaczanie odpowiedzi impulsowej kanału radiowego i jego pasma koherencji.
Stanowisko zapewnia odbiór sygnałów w szerokim paśmie i prowadzenie ich analizy równolegle we
wskazanych kanałach wąskopasmowych oraz ich archiwizację. W artykule zostaną scharakteryzowane
procedury przetwarzania dla potrzeb wykrycia sygnałów DS CDMA, wyznaczania odpowiedzi
impulsowych, jednoczesnego odbioru sygnałów zarejestrowanych w szerokim paśmie na przykładzie
analizy sygnałów systemu łączności satelitarnej Inmarsat.
37. Szacowanie niepewności rezystancji zmierzonej metodą techniczną
Stanisław Szczesny, Anna Golijanek-Jędrzejczyk, Dariusz Świsulski
email: [email protected]
W referacie zostanie zaprezentowana metodologia szacowania niepewności rezystancji zmierzonej
metodą techniczną, przy zastosowaniu metody opartej na Przewodniku GUM.
Pomiar rezystancji metodą techniczną jest pomiarem pośrednim, w związku z czym wyznaczenie
niepewności pomiarowej nie jest zagadnieniem trywialnym. W tym celu autorzy, stosując prawo
propagacji niepewności, przedstawią kolejne etapy oszacowania niepewności rozszerzonej pomiaru
rezystancji.
W artykule zaprezentowana zostanie także aplikacja, zaprojektowana przez autorów, pozwalająca
na przeprowadzenie tego typu analizy.
38. Model farmy fotowoltaicznej i badanie jej wpływu na system elektroenergetyczny
Bartosz Tarakan, Marcin Sarnicki, Ryszard Zajczyk, Stanisław Czapp, Krzysztof Tarakan

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 37
email: [email protected]
Moc zainstalowana oraz produkcja energii elektrycznej z odnawialnych źródeł energii od
kilkunastu lat systematycznie w Polsce wzrasta. Należy spodziewać się, że tendencja ta w najbliższych
latach zostanie utrzymana. Dość dużym zainteresowaniem cieszą się źródła fotowoltaiczne, co sprawia,
że przy znacznych ich mocach zainstalowanych konieczne staje się badanie wpływu tych źródeł na
system elektroenergetyczny. W artykule przedstawiono model farmy fotowoltaicznej wykonany w
programie DIgSILENT PowerFactory®. Zaprezentowano również wyniki wstępnych badań
symulacyjnych przeprowadzonych na opracowanym modelu.
39. Comprehensive Modelling of the Economical Threshold
of Railway Line Electrification
Maksymilian Tomczyk, Michał Pacholczyk, Krzysztof Karwowski
email: [email protected], [email protected],
Goal of this paper is the mathematical model estimating economical threshold between usage of
combustion engine traction and electrical traction for new and modernized railway passenger
communication lines. There is no such a comprehensive model currently available. Defined model was
implemented into Matlab and validated on “Pomorska Kolej Metropolitalna” investment time-frame and
its cost of infrastructure, type of diesel multiply units (DMU) and track geometry. Energy yield due to
energy recovery devices usage in electric multiply unit (EMU) is included. Meeting chosen vehicles
maintenance levels is taken into consideration as well. Result of this analysis is thresholds of economic
efficiency in analysed period of time for traffic flow expressed in millions of passenger per year.
A lot of new investments are on in Polish Railway. Regarding the nature of the investments and
condition of Polish Railway lines electrification economical threshold has to be taken into account in
planning stage. Economical threshold determines when it is reasonable to use an electrical traction over
diesel engine traction in predefined or predicted traffic flow. Costs of construction of the diesel traction
line are much smaller but with increase of traffic flow one reach a point where electric traction generates
equal expenses. Behind this point costs of consumed energy become significantly higher and it is cost
effective to use electric traction. To specify economical threshold number of factors regarding constant
and variable costs have to be taken into account.
The modelling consists of several stages. First, initial conditions, that are costs related to
infrastructure construction are considered. Then, the defined sub-model of the vehicle dynamics
calculates energy consumption on predefined line. In this step calculations of the energy yield in energy
recovery devices are included. Later, the costs related to long-term maintenance are analysed. A Life
Cycle Cost (LCC) is used in this purpose. LCC analysis defines constant costs of the cars maintenance,
which vary with train operator timetables. Summing up all the costs resulting from described steps and
linking them with traffic flow analysis we estimate economical threshold of railway line electrification.
Model and its implementation in Matlab were validated on “Pomorska Kolej Metropolitalna”
investment. Results from dynamics sub-model are almost equal to real timetable. PKM board is planning
to electrify line by year 2023. A threshold calculated in model indicates that is profitable about 2023
with traffic flow at level of the 914 passengers per hour. Cost of operation are average costs over
analysed 31 years long time period. Regarding limited amount of information the proposed model is
very good estimator of economical threshold.
38 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
40. Modyfikacja parametrów modelu matematycznego dynamiki
statku treningowego Blue Lady
Mirosław Tomera
e-mail: [email protected]
Statek treningowy Blue Lady jest modelem fizycznym zbiornikowca, wykonanym w skali 1:24, i
jest wykorzystywany do szkolenia kapitanów w Ośrodku Manewrowania Statkami, znajdującym się na
jeziorze Silm w Iławie/Kamionce. Podstawowe parametry tego modelu są następujące: masa 22934.4 kg,
długość całkowita 13.78 m, szerokość 2.38 m, maksymalna prędkość 1.2 m/s. Model ten wyposażony
został w płetwę sterową, śrubę napędową, dwa tunelowe stery strumieniowe: dziobowy i rufowy oraz
dwa obrotowe stery strumieniowe: dziobowy i rufowy.
Dla tego modelu fizycznego zbiornikowca został już wcześniej opracowany złożony model
matematyczny dynamiki statku i zainstalowanych na nim pędników, który obecnie wykorzystywany jest
do badań symulacyjnych opracowywanych algorytmów sterowania ruchem statku. Jednak
dotychczasowy model matematyczny dynamiki zbiornikowca, mocno odbiega od zachowania statku
rzeczywistego w zakresie średnich i dużych prędkości. Powoduje to, że uzyskiwane eksperymentalne
wyniki badań opracowywanych algorytmów sterowania mocno odbiegają od tych, które uzyskiwane są
na modelu matematycznym. Posiadanie dokładnego modelu matematycznego byłoby dużym
ułatwieniem w opracowywaniu algorytmów sterowania przeznaczonych do sterowania ruchem statku
treningowego Blue Lady.
Modyfikacja parametrów modelu matematycznego statku treningowego Blue Lady wykonana
zostanie przy użyciu metod sztucznej inteligencji, na podstawie eksperymentalnych prób manewrowych
przeprowadzonych w Ośrodku Manewrowania Statkami na jeziorze Silm w Iławie/Kamionce.
41. Sterowanie modelem fizycznym tankowca wzdłuż zadanej trasy przejścia
Mirosław Tomera
e-mail: [email protected]
Wraz z rozwojem techniki stosowanej w nawigacji ruchu statku, rosną również wymagania
związane z dokładnością sterowania ruchem statku polegające na stabilizacji jego współrzędnych
położenia. Przede wszystkim odnosi się to do torów wodnych o intensywnym ruchu, ograniczonej
wielkości i małej głębokości, do cieśnin, kanałów, a także do prowadzenia statku na trajektorii
bezpiecznej w sytuacji kolizyjnej. Oprócz zwiększenia dokładności sterowania i wynikającej z niej
wzrostu bezpieczeństwa prowadzenia statku wzdłuż zadanej, bezpiecznej trajektorii, istnieje
konieczność automatyzacji tego procesu, z wykorzystaniem współczesnych metod sterowania oraz
najnowszych środków technicznych. Wspomniana konieczność wynika między innymi z tendencji do
redukcji liczebności załóg pływających, z zastępowania człowieka w ciężkich, monotonnych, żmudnych
czynnościach i pracach, jak również z konieczności poprawy wskaźników ekonomicznych eksploatacji
statku poprzez minimalizację czasu podróży oraz zużycia paliwa.
Trasa ruchu statku określana jest zazwyczaj w zależności od punktów drogi. Przy wyznaczaniu
punktów drogi pod uwagę brane są takie własności jak: warunki pogodowe, unikanie przeszkód i
planowanie misji. Każdy punkt drogi definiowany jest we współrzędnych kartezjańskich. Trajektoria
zadana tworzona jest więc przez odcinki łączące kolejne punkty drogi. Wokół każdego punktu drogi
definiowany jest okrąg akceptacji i kiedy statek go osiąga to wówczas trajektoria zadana przełączana jest
na odcinek łączący kolejne punkty drogi. Z każdym odcinkiem drogi może być powiązania prędkość
poruszania się statku.
W pracy przedstawiony zostanie regulator trajektorii, którego algorytm działania opiera się na
teorii sterowania optymalnego, wykorzystując układ GPS (Global Positioning System). Prędkości
liniowe: wzdłużna i poprzeczna, oraz prędkość kątowa wyznaczane są na podstawie mierzonych
współrzędnych położenia statku (x, y) i kursu statku przez filtr Kalmana. Jakość pracy
zaprojektowanego algorytmu sterowania ruchem statku będzie badana na statku treningowym Blue Lady
w Ośrodku Manewrowania Statkami na jeziorze Silm w Iławie/Kamionce.
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 39
42. Analiza drgań przewodów jezdnych sieci trakcyjnej
w aspekcie oceny jej stanu technicznego
Andrzej Wilk1, Mirosław Mizan2, Krzysztof Karwowski3, Paweł Kaczmarek4
email: [email protected], [email protected],
[email protected], [email protected]
W referacie przedstawiono możliwości wykorzystania analizy wymuszonych drgań przewodów
jezdnych sieci trakcyjnej do oceny jej stanu technicznego. Zaprezentowano wyniki badań
laboratoryjnych, w których za pomocą laserowych mierników przemieszczeń rejestrowano drgania
odcinków przewodów jezdnych m.in. o zróżnicowanym stopniu zużycia, przy różnych siłach naciągu,
przy zmiennych kątach mocowania, jak również przy różnej sile wzbudzenia drgań. W oparciu o
przeprowadzone analizy w dziedzinie czasu i częstotliwości, wskazano zależności między stanem sieci a
wybranymi parametrami rejestrowanych przebiegów.
Przedstawiono wstępną wersję modelu matematycznego odcinka górnej sieci trakcyjnej sieci,
bazującego na metodzie energetycznej Lagrange’a. Elementy sieci trakcyjnej podzielono na skupione
elementy zachowawcze (bezwładnościowe i sprężyste) w ruchu postępowym. Wprowadzono także
skupione zastępcze elementy dyssypatywne (tłumiki) w ruchu postępowym. Wyznaczono funkcję
Lagrange’a oraz funkcję dyssypacji Rayleigha układu we współrzędnych uogólnionych. Wyznaczono
także siły uogólnione z uwzględnieniem oddziaływań grawitacyjnych oraz sił zewnętrznych
wywoływanych przez odbieraki prądu. Parametry skupionych elementów zachowawczych o charakterze
bezwładnościowym zostały wyznaczone na drodze teoretycznej. Opisano metodykę wyznaczania
parametrów skupionych elementów zachowawczych o charakterze sprężystym oraz skupionych
elementów dyssypatywnych w oparciu o wyniki badań laboratoryjnych.
Przedstawiono założenia rozwojowe modelu, zmierzające w szczególności do jego integracji z
opracowanym modelem trakcyjnego odbieraka prądu, co umożliwi modelowanie dynamicznej
współpracy tych dwóch elementów systemu zasilania pojazdów w różnych warunkach ruchowych i przy
ich różnym stanie technicznym. Opracowane modele są dedykowane do badań certyfikacyjnych dla
nowych i modernizowanych odcinków sieci, jak również do wspierania procesów oceny stanu
technicznego sieci i odbieraków w systemach monitoringu infrastruktury kolejowej.
43. Regulacja mocy biernej w mikrosieciach z źródłami wytwórczymi
Mirosław Włas
email: [email protected]
W ramach projektu badawczo-rozwojowego w Katedrze Automatyki Napędu Elektrycznego
został zaprojektowany i wykonany system zarządzania energią oraz sterowania źródłami energii o
nazwie ECV-10. System zainstalowano w zakładzie produkcyjnym firmy Infracorr wraz z źródłami
energii z fotowoltaiki, wiatru i gazu ziemnego. System umożliwia pomiar ośmiu prądów i sześciu
napięć, co w połączeniu z rozbudowanym procesorem sygnałowym OMAP-L138 umożliwia
przeprowadzenie zaawansowanych analiz jakości energii i pomiarów mocy. Pomiary można wykonać
zarówno po stronie odbiorów jak i po stronie odnawialnych źródeł energii. ECV-10 posiada również
liczne wejścia i wyjścia, zarówno analogowe jak i cyfrowe, dzięki czemu możliwe jest wysterowanie
urządzeń, takich jak falowniki i kompensatory. W pracy opisano system który steruje mocą bierną
generowaną przez przekształtnik sieciowy elektrowni wiatrowej oraz sterujący stycznikami
załączającymi kolejne stopnie baterii kondensatorów.
40 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
44. Zastosowanie algorytmów sztucznych sieci neuronowych
do prognozowania zużycia energii elektrycznej
Mirosław Włas
email: [email protected]
W artykule przestawiono algorytmu przewidywania zużycia energii elektrycznej zakładów
produkcyjnych i budynków mieszkalnych z wykorzystaniem informacji o produkcji i warunkach
atmosferycznych. W artykule zostaną wymienione metody predykcji oraz zostanie zaproponowana
własna metoda z wykorzystaniem wielowarstwowej sieci neuronowej. W pracy zostaną przedstawione
testy działania programu na podstawie rzeczywistych danych pomiarowych. Głównym zadaniem
badawczym było sprawdzenie dokładności algorytmu predykcji do prognozowania zużycia energii
elektrycznej. Ma to na celu uzyskanie programu, którego wyniki o charakterze ilościowym będą
wykorzystywane do prognozowania potrzeb zakupowych na TGE (Towarowej Giełdzie Energii) przy
udziale metody zakupu energii elektrycznej na Rynku Dnia Następnego.
45. Regulator rozmyty o właściwościach regulatora trójpołożeniowego
Jacek Zawalich
email. [email protected]
Regulatory trójpołożeniowe są najbardziej popularnymi i najprostszymi regulatorami w układach
automatyki, w których jako element wykonawczy zastosowano silnik elektryczny pracujący w sposób
nawrotny. Ich istotną cechą jest to, że sygnał sterujący przyjmuje tylko trzy różne wartości. W układach
takich jakość regulacji określa się m.in. poprzez analizę amplitudy oscylacji wielkości regulowanej,
częstotliwości, raz wartości średniej tych oscylacji. Układy takie przeważnie stosuje się w rozwiązaniach
przemysłowych, w których wymagania na jakość regulacji nie są duże.
Obecnie, mając do dyspozycji zaawansowane techniki obliczeniowe, chętnie stosuje się regulatory
rozmyte, które z jednej strony są bardziej zrozumiałe dla operatorów ze względu na generowanie
sygnałów bezpośrednio zrozumiałych dla człowieka, a z drugiej strony umożliwiają osiągnięcie
właściwości układów, które w klasycznych rozwiązaniach nie były do tej pory dostępne.
Referat jest próbą porównania otrzymywanej jakości regulacji w układzie z regulatorem
trójpołożeniowym oraz w układzie z regulatorem rozmytym, którego reguły wnioskowania mają
realizować właściwości regulatora trójpołożeniowego. Analiza zastosowania różnych modyfikacji
charakterystyki trójpołożeniowej w wykonaniu z regulatorem rozmytym daje pogląd na powstanie
nowych możliwości stosowania takich układów. W referacie przedstawione zostaną wyniki badań
wykonane w programie Matlab-Simulink. Będą one odpowiedzią m.in.: na ile można polepszyć jakość
regulacji, jak można zmniejszać występujące oscylacje oraz jak wprowadzać ujemną histerezę elementu
trójpołożeniowego.
46. Modelowanie propagacji impulsów wyładowań niezupełnych w uzwojeniach transformatorów
energetycznych z zastosowaniem stanowiska laboratoryjnego
Paweł Zydroń, Michał Bonk, Łukasz Fuśnik Konrad Bęc,
Dominik Maniak, Franciszek Szafrański
email: [email protected], [email protected]
Transformatory energetyczne są jednymi z podstawowych elementów systemu
elektroenergetycznego. Z tego względu duże znaczenie dla zapewnienia niezawodności ich działania ma
wszechstronna i wiarygodna diagnostyka. Jednym z objawów obecności wewnętrznych defektów układu
izolacyjnego jest powstawanie wyładowań niezupełnych. W przypadku transformatorów energetycznych
z izolacją papierowo-olejową mogą one występować w różnych miejscach, np. w uzwojeniach
transformatora lub w jego przepustach. Sygnały elektryczne wyładowań są rejestrowane na
doprowadzeniach liniowych transformatora, do których docierają propagując wzdłuż uzwojeń od
miejsca ich występowania. W zależności od położenia wewnętrznego defektu oraz jednostkowych
parametrów elektrycznych uzwojenia zmieniają się parametry czasowo-częstotliwościowe sygnałów

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 41
obserwowanych w miejscu jego detekcji. W referacie przedstawione będą wyniki badań efektów
propagacji impulsów wyładowań niezupełnych na modelach uzwojeń transformatorów, które zostaną
skonfrontowane z rezultatami symulacji numerycznych. Podczas symulacji zostanie uwzględniona
złożona, wieloelementowa struktura uzwojenia transformatora oraz jej wpływ na czasowo-
częstotliwościowe właściwości impulsów rejestrowanych na zacisku liniowym. Badania będą
prowadzone na obecnie powstającym, dydaktycznym stanowisku laboratoryjnym, przeznaczonym do
stosowania w laboratorium diagnostyki urządzeń elektroenergetycznych.
47. Analiza teoretyczna i modelowanie wpływu harmonicznych napięcia
na powstawanie wyładowań niezupełnych w układach izolacyjnych
wysokiego napięcia
Paweł Zydroń, Paweł Mikrut, Józef Roehrich
email: [email protected], [email protected]
Powstawanie wyładowań niezupełnych w defektach układów izolacyjnych jest uzależnione od
napięcia działającego na układ (stałe/przemienne, sinusoidalne/odkształcone) oraz od parametrów
określających właściwości samego defektu, takich jak: położenie defektu w układzie izolacyjnych, jego
charakter (np. ostrze w gazie, inkluzja wewnętrzna), stan powierzchni dielektryka w obszarze defektu
itp.. W referacie rozważany będzie wpływ odkształceń przemiennego napięcia probierczego na
powstawanie wyładowań niezupełnych oraz na ich parametry istotne z punktu widzenia metod fazowo-
rozdzielczych rejestracji i analizy wyładowań. Przedstawiona zostanie analiza teoretyczna, wyniki
rejestracji laboratoryjnych dla źródeł modelowych oraz wybrane symulacje numeryczne.
48. Szacowanie niepewności pomiaru układu do diagnostyki łożysk tocznych
Ariel Dzwonkowski
W artykule zostanie zaprezentowane zagadnienie dotyczące szacowania niepewności pomiaru
układu do diagnostyki łożysk tocznych, przy zastosowaniu metody opartej na Przewodniku GUM.
Pomiary diagnostyczne przeprowadzone zostały na stanowisku badawczym metodą pomiaru i
analizy mocy chwilowej. Ze względu na fakt, iż pomiar mocy jest pomiarem pośrednim szacowanie
niepewności jest złożonym zagadnieniem. Do oceny niepewności układu pomiarowego wykorzystano
opracowany w tym celu system komputerowy. Do analizy niepewności wykorzystany został również
kalibrator FLUKE 5500A.
Wyniki przeprowadzonych analiz umożliwią określenie niepewności pomiarowej, jakiej można się
spodziewać, dokonując badań diagnostycznych łożysk tocznych w określonych warunkach.
49. Struktura systemu sterowania statkiem dynamicznie pozycjonowanym
Roman Śmierzchalski
email: [email protected]
W artykule przedstawiono funkcje i zadania systemu dynamicznego pozycjonowania (DP) statku.
Omówiono zagadnienia sterownia - stabilizacji pozycji i kierunku (kursu rzeczywistego statku) przy
małej prędkości manewrowania oraz modele statku DP. Określono wymagania towarzystw
klasyfikacyjnych dla statków DP. Przedstawiono wielowarstwową strukturę systemu sterowania
statkiem DP, gdzie do podstawowych problemów należy zaliczyć filtrację sygnałów oraz estymację
wielkości mierzonych i niemierzonych, dobór metody sterownia i regulatora DP oraz alokację sterów i
napędów

42 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 43
IV. WYNIKI KONKURSU
„NAJLEPSZY REFERAT W CYKLU SEMINARYJNYM ZKwNiT ‘2013”
Za najlepsze referaty w cyklu seminaryjnym „Zastosowanie Komputerów w Nauce i Technice” roku
2015 zostały uznane referaty:
Diffraction phase microscopy for observation on red blood cells fluctuation
Autorzy: Sylwia Babicz-Kiewlicz, Barbara Stawarz-Graczyk, Paweł Wierzba, Adam Mazikowski
Robot typu Quadrocopter sterowany mikrokontrolerami o niewielkiej mocy obliczeniowej
Autorzy: Stanisław Szczesny, Anna Golijanek-Jędrzejczyk, Leszek Rafiński, Przemysław Sztranc
Ponadto dyplom wyróżnienia otrzymali:
Arkadiusz Łykowski, Arkadiusz Szewczyk za referat
Badanie właściwości elementów mocy z węglika krzemu w zastosowaniach układowych
Stanisław Czapp, Kornel Borowski za referat:
Badanie wpływu odkształcenia napięcia sieci na przebieg prądu obciążenia wybranych lamp
oświetlenia ulicznego
V. KONFENCJE I SYMPOZJA W ROKU 2015
XXV Cykl Seminariów Zastosowanie Komputerów w Nauce i Technice
(organizator PTETiS/Gdańsk)
Seminaria odbywały się we wtorki w Sali 27 w budynku Wydziału Elektrotechniki i Automatyki w
okresie od kwietnia do czerwca i od października do grudnia 2015 r. W ramach seminariów wygłoszono
22 referaty opublikowane w nr 46 Zeszytów Naukowych Wydziału Elektrotechniki i Automatyki
Politechniki Gdańskiej. Łączna liczba uczestników seminariów – 297 osób.
II Konferencja E-Technologie w kształceniu inżynierów
(organizator Politechnika Gdańska, organizacja wspierająca PTETiS/Gdańsk)
Konferencji odbyła się w Politechnice Gdańskiej w dniu 30 kwietnia 2015 r. Jej celem była
popularyzacja najnowszych technologii w edukacji inżynierskiej oraz pokazanie dobrych praktyk w tym
zakresie. Wygłoszono 19 referatów, które zostały opublikowane w nr 41 Zeszytów Naukowych
Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej. Liczba uczestników konferencji 57
osób.
XVII Konferencja Międzynarodowa Aktualne Problemy w Elektroenergetyce
(organizatorzy Katedra Elektroenergetyki WEiA PG, patron honorowy PTETiS/Gdańsk)
Konferencji odbyła się w Jastrzębiej Górze w dniach 17 – 19 czerwca 2015 r. Jej celem była
prezentacja aktualnych problemów elektroenergetyki oraz kreowanie jej perspektyw rozwojowych.
Wygłoszono 80 referatów, które zostały opublikowane w nr 42 Zeszytów Naukowych Wydziału
Elektrotechniki i Automatyki Politechniki Gdańskiej. Liczba uczestników konferencji 160 osób.
I Sympozjum Historia Elektryki
(współorganizatorzy: Centralna Komisja Historyczna SEP, Wydział Elektrotechniki i Automatyki PG,
SEP/Gdańsk, Instytut Historii Nauki PAN, PTETiS/Gdańsk)
W ramach konferencji, która odbyła się w Politechnice Gdańskiej w dniach 29 - 30 czerwca 2015 r.
wygłoszono 43 referaty opublikowane w nr 43 i nr 44 Zeszytów Naukowych Wydziału Elektrotechniki i
Automatyki Politechniki Gdańskiej. Liczba uczestników konferencji 80 osób.
Sympozjum jest odpowiedzią na ciągłe zainteresowanie w Polsce historią techniki , w tym
elektrotechniki Pozwoliło na spotkanie osób zainteresowanych historią elektrotechniki pochodzących z
różnych środowisk: wyższych uczelni technicznych, przemysłu, historyków zajmujących się naukowo
historią techniki

44 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
VI. Krajowa Konferencja Elektroniki
(współorganizatorzy: PTETiS Oddział Gdańsk, Politechnika Koszalińska)
Konferencji odbyła się w Darłówku Wschodnim w dniach 8 -12 czerwca 2015 r. Jej celem była
prezentacja osiągnięć w dziedzinach: Materiałów i technologi dla nanoelektroniki i fotoniki,
Fotowoltaiki, Elektroniki drukowanej, Roli półprzewodników złożonych w elektronice, Zastosowaniu
elementów z azotku galu, Techniki radarowej. Wygłoszono 168 referatów zapisanych w formie
elektronicznej na pendrivach. Referaty wytypowane przez Komitet Naukowy zostały opublikowane w
następujących czasopismach naukowych i naukowo-technicznych: Elektronika, Przegląd
Elektrotechniczny, Metrology and Measurement System, Archives of Electrical Engineering, Bulletin of
the Polish Academy of Sciences, Optoelectronics Review. Liczba uczestników konferencji 170 osób.
LI Międzynarodowe Sympozjum Maszyn Elektrycznych SME
(współorganizatorzy: Katedra Energoelektroniki i Maszyn Elektrycznych PG, Polska Akademia
Nauk- Komitet Elektrotechniki, PTETiS/Gdańsk, Instytut Kaszubski)
Konferencji odbyła się w Gdańsku i Chmielnie w dniach 21 – 24 czerwca 2015 r. Jej celem było
zorganizowanie spotkania pracowników krajowych i zagranicznych ośrodków akademickich,
projektowych i naukowo-badawczych prowadzących prace o następującej tematyce: Teoria,
modelowanie i symulacja, Maszyny piezoelektryczne, Projektowanie i optymalizacja, Materiały i
wytwarzanie, Pomiary, diagnostyka i monitoring, Maszyny specjalne, Transformatory i dławiki,
Zjawiska termiczne i wibroakustyczne, Maszyny elektryczne w systemach napędowych, Maszyny
elektryczne w autonomicznych systemach generacji energii elektrycznej, Nauczanie maszyn
elektrycznych. Wygłoszono 64 referaty. Liczba uczestników konferencji 71 uczestników
39th International Microelectronics and Packaging IMPAS
(współorganizatorzy: Wydział Elektroniki, Telekomunikacji i Informatyki PG,
Akademia Morska w Gdyni, PTETiS/Gdańsk)
Konferencja odbyła się w Gdańsku w dniu 21 września 2015 r. Jej celem była mobilizacja i
integracja środowiska naukowego na rzecz współpracy ze szkolnictwem na poziomie średnim oraz
gimnazjalnym. Wygłoszono 18 referatów i przedstawiono 78 prezentacji posterowych. Liczba
uczestników konferencji 99 osób w tym 21 zagranicznych.
Gdańskie Dni Elektryki’2015 – XL Konferencja Naukowo-Techniczna
((współorganizatorzy: SEP/Gdańsk, Wydział EiA PG, PTETiS/Gdańsk)
Konferencja odbyła się w Gdańsku w dniach 5–7 listopada 2015 r. W konferencji uczestniczą
przedstawiciele wyższych uczelni, firm elektroenergetyki zawodowej i przemysłowej, biur
projektowych, firm wykonawczych jak również służby eksploatacyjne. Celem konferencji jest wymiana
doświadczeń z zakresu branży elektrycznej, prezentacja nowych wyrobów elektrotechnicznych i
sposobów ich wykorzystania. Uczestnicy konferencji mogli uczestniczyć w wyjazdach technicznych
umożliwiających zwiedzanie Centralnej Dyspozycji Mocy (Energa-Operator), Elektrociepłowni
Wybrzeże (EDF) oraz Farmy Fotowoltaicznej (Energa S.A).
Prezentowane referaty naukowe (11) zostały opublikowane w 45 Zeszycie Naukowym Wydziału
Elektrotechniki i Automatyki PG

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 45
VI. WYDAWNICTWA ODDZIAŁU GDAŃSKIEGO W ROKU 2015
1. Biuletyn Informacyjny Oddziału: Nr 29 - ISSN 2080-167X, kwiecień 2015 nakład
160 egz.
2. Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki PG nr 41, E-Technologie w
kształceniu inżynierów 2015, nakład 200 egz.
3. Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki PG nr 42, Aktualne Problemy w
Elektroenergetyce APE’2015, nakład 300 egz.
4. Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki PG nr 43 i 44, I Sympozjum Historia
Elektryki SHE’2015, nakład 200+200 egz.
5. XIV Krajowa Konferencja Elektroniki, Materiały Konferencyjne 2015 - pendrive
6. Materiały Konferencyjne SME 2015 nakład
7. Archives of Electrical Engineering referaty pokonferencyjne z SME 2015 - na etapie recenzji
(rok wydania 2016)
8. Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki PG nr 46, Zastosowanie
Komputerów w Nauce i Technice, XXV cykl seminaryjny, nakład 170 egz.

46 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 47
VII. CYKLICZNE KONFERENCJE NAUKOWE ORGANIZOWANE
I WSPÓŁORGANIZOWANE PRZEZ PTETIS

48 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 49
VIII. KONFERENCJE I SEMINARIA W ROKU 2016
XXVI Cykl Seminariów Zastosowanie Komputerów w Nauce i Technice
(organizator PTETiS/Gdańsk)
Seminaria odbywają się we wtorki w Sali 27 w budynku Wydziału Elektrotechniki i Automatyki w
okresie od kwietnia do czerwca i od października do grudnia 2016 r. W trakcie cyklu zostanie
wygłoszonych 40 referatów. Po uzyskaniu pozytywnej opinii przez dwóch niezależnych recenzentów
referaty zostaną opublikowane w kolejnym Zeszycie Naukowym Wydziału Elektrotechniki i
Automatyki Politechniki Gdańskiej, który ukaże się w grudniu 2017 r. Informacje o Seminarium są
podawane na stronie internetowej Towarzystwa:
XV Krajowa Konferencja Elektroników KKE’ 2016
(współorganizatorzy: PTETiS/Gdańsk, Wydział Elektroniki Politechniki Koszalińskiej)
XV KKE’ 2016 organizowana przez Oddział Gdańsk PTETiS Elektrotechniki Teoretycznej
Stosowanej oraz Wydział Elektroniki i Informatyki Politechniki Koszalińskiej odbędzie się w czerwcu
2016 roku w Darłówku Wschodnim. Obrady odbędą się w Centrum Konferencyjnym a zakwaterowanie
w hotelu JAN.
Planowane są sesje regularne i specjalne. Będą również wygłoszone referaty plenarne przez znanych
naukowców. Sesje specjalne będą zorganizowane przede wszystkim przez kierowników dużych
projektów badawczych. Poświęcone będą miedzy innymi problematyce: Materiałów i technologii dla
nanoelektroniki i fotoniki, Fotowoltaiki, Elektroniki drukowanej, Roli półprzewodników złożonych w
elektronice, Zastosowania elementów z azotku galu, Techniki radarowej. Komitet naukowy
zarekomenduje wyróżnione prace do druku czasopismach o poważnej randze międzynarodowej. W
trakcie Konferencji odbędzie się prezentacja wyrobów znanych firm komercyjnych. Dla najmłodszych
uczestników (do 30 lat) zorganizowany będzie konkurs na najlepsze prace w poszczególnych grupach
tematycznych.
Informacje dotyczące m.in. grup tematycznych, sposobu przygotowania i terminu zgłaszania
referatów, kosztów udziału w Konferencji i warunków płatności, programu konferencji, będą
sukcesywnie zamieszczane na stronie internetowej
www:kke.man.koszalin.pl
Konferencja odbywa się pod patronatem Komitetu Elektroniki i Telekomunikacji Polskiej
Akademii Nauk. Komitetowi Naukowemu Konferencji przewodniczy Prof. dr hab. inż. Włodzimierz
Janke.
Organizatorzy Konferencji zapewniają miłą atmosferę, dobre warunki zakwaterowania i
prowadzenia obrad, a także możliwość relaksu w trakcie spacerów nad morzem oraz imprez
towarzyszących.
14th International Conference on Optical and Electronic Sensors COE'2016 (organizer: Gdańsk University of Technology-Faculty of Electronics, Telecommunications and
Informatics, supported by PTETiS/Gdańsk)
The 14th International Conference on Optical and Electronic Sensors will take place in Gdańsk
from 19th to 22nd June 2016. The objective of the Conference is to bring together lecturers, researchers
and professionals in the field of OES with the aim to exchange ideas and information and contribute to
the development of sensors.
Conference will be held at the facilities of the Hotel Orle, Lazurowa str. 8
80-680 Gdansk-Sobieszewo.
Scope of the conference covers all aspects of sensors and sensor systems development
including:
Theory, modelling and design of sensors, transducers and actuators
New materials and technologies for sensors, micro and nanosystems
Physical quantities sensors
Environmental Sensors
Electrochemical, semiconductor and electrocatalytic gas sensors

50 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
Biosensors and lab-on-chips
Optoelectronic sensors, fiber optic and image converters
MEMS, optical MEMS, RF MEMS, NEMS
Sensory networks, transmission systems
Applications and metrological aspects of sensors and microsystems
Further information on the conference can be found on the website:
http://coe2016.eti.pg.gda.pl
XLI Gdańskie Dni Elektryki’2016 Gdańskie Dni Elektryki’ 2016 organizowane przez Oddział Gdański SEP, Wydział Elektrotechniki
i Gdańskiej PG i Oddział Gdański PTETiS odbędą się w listopadzie 2016 r. Konferencja ma na celu
przekazanie dla środowiska elektryków aktualnej wiedzy z zakresu elektryki, zarówno w sensie ogólnym
jak również wiedzy z poszczególnych specjalności.
Wygłoszone referaty po pozytywnej Komitetu Naukowego zostaną opublikowane w kolejnym numerze
Zeszytów Naukowych Politechniki Gdańskiej .
Bliższe informacje na temat konferencji można będzie znaleźć na stronie internetowej
Stowarzyszenia Elektryków Polskich – Oddział Gdańsk
http://www.sep.gda.pl

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 51
IX. KONFERENCJE NAUKOWE ORGANIZOWANE I WSPÓŁORGANIZOWANE
PRZEZ PTETIS W ROKU 2016

52 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk

Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk 53
X. ZESZYTY NAUKOWE WEiA PG W INTERNECIE
Pełne treści kolejnych Zeszytów Naukowych Wydziału Elektrotechniki i Automatyki są dostępne
na stronie internetowej Wydziału EiA PG www.ely.pg.gda.pl > Badania naukowe > Zeszyty Naukowe
Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej.
Wyszukiwanie materiałów jest możliwe według kilku kryteriów: nazwisko autora, słowa kluczowe,
tytuł referatu, nr zeszytu.
XI. ZAPROSZENIE DO UDZIAŁU W XXVII CYKLU SEMINARYJNYM
„ZASTOSOWANIE KOMPUTERÓW W NAUCE I TECHNICE 2017”
Oddział Gdański Polskiego Towarzystwa Elektrotechniki Teoretycznej i Stosowanej zaprasza do
udziału w kolejnym XXVII cyklu seminaryjnym
ZASTOSOWANIE KOMPUTERÓW W NAUCE I TECHNICE ’2017
Celem seminarium jest wymiana doświadczeń i sposobów wykorzystania komputerów w nauce,
technice i dydaktyce. Seminarium różni się od typowych konferencji, ponieważ przy jednym spotkaniu
wygłaszane są najwyżej trzy referaty. Dzięki temu słuchacze przychodzący na dany odczyt są
zainteresowani tematyką prezentowaną w referatach, a czasu na spokojną dyskusję jest znacznie więcej.
Komitet naukowy
Prof. dr hab. inż. Kazimierz Jakubiuk – przewodniczący
dr inż. Lech Hasse, dr hab. inż. Bogdan Kosmowski, dr hab. inż. Janusz Smulko, prof. PG,
dr inż. Ludwik Referowski, dr hab. inż. Dariusz Świsulski prof. PG.
Zgodnie z wytycznymi MNiSW każdy artykuł będzie opiniowany przez dwóch niezależnych
Recenzentów, którzy nie wchodzą w konflikt interesów z autorami.
Termin i lokalizacja seminarium
Seminarium będzie się odbywać we wtorki w okresie od marca do czerwca i od października do
grudnia 2017 roku, dzięki czemu autorzy referatów mogą zaproponować najbardziej dogodny termin.
Referaty będą wygłaszane na terenie Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej
w budynku imienia Profesora Kazimierza Kopeckiego, w sali Nr 27.
Dokładny harmonogram odczytów będzie ogłoszony w marcu 2017 roku.
Publikacje materiałów seminaryjnych
Wygłoszone referaty po uzyskaniu pozytywnej opinii recenzentów i akceptacji Komitetu
Naukowego zostaną wydane w grudniu 2017 roku w kolejnym Zeszycie Naukowym Wydziału
Elektrotechniki i Automatyki Politechniki Gdańskiej (ISSN 2353-1290).
Konkurs na najlepszy referat w ramach cyklu seminaryjnego
”Zastosowanie Komputerów Nauce i Technice 2017”
W oparciu o opinię Komitetu Naukowego seminarium autorom dwóch najlepszych,
opublikowanych referatów zostanie przyznany dyplom wraz z nagrodą. Wyniki konkursu zostaną
ogłoszone na początku roku 2017.
Zgłoszenie udziału w seminarium
Streszczenie referatu o objętości pół strony formatu A4 napisane czcionką Times New Roman 10
pkt z pojedynczym odstępem między wierszami (około 450 słów) przy zachowaniu 2,5 centymetrowego
górnego, dolnego, lewego i prawego marginesu winno być przesłane e-mailem do organizatorów do dnia
14 lutego 2017 na następujące dwa adresy:
[email protected] oraz [email protected]
Streszczenie powinno zwierać:
TYTUŁ REFERATU, Imię i NAZWISKO autora (autorów)
Miejsce pracy, e-mail, Propozycję terminu wygłoszenia referatu.
Koszty udziału w seminarium
Ewentualne koszty przejazdów do Gdańska, noclegu i wyżywienia uczestnicy seminariów
pokrywają we własnym zakresie.

54 Biuletyn Informacyjny nr 30/2016 – PTETiS Oddział Gdańsk
Autorzy referatów pokrywają koszty związane z wydaniem materiałów seminaryjnych, które wynoszą za
każdy referat:
dla członków PTETiS - 150 PLN (opłata ulgowa)
dla pozostałych osób - 250 PLN
W przypadku, gdy objętość referatu przekracza 6 stron, autorzy referatu pokrywają także koszty
wydania dodatkowych stron w wysokości 100 PLN za każdą dodatkową stronę nieparzystą. Istnieje
również możliwość zamieszczenia kolorowych rysunków w tekście po wniesieniu dodatkowej opłaty
120 PLN za stronę z rysunkami.
Opłaty za udział w seminarium należy wpłacać na konto:
Polskie Towarzystwo Elektrotechniki Teoretycznej i Stosowanej - Oddział Gdańsk
Konto Nr 71 1020 1811 0000 0502 0078 5816
Terminarz
do 14.02.17- nadsyłanie kart zgłoszeniowych oraz streszczeń referatów
do 14.03.17- informacje o akceptacji, wraz programem seminarium oraz wzorcem tekstu
do 30.09.17- nadsyłanie pełnego wydruku tekstu referatu pocztą oraz pliku (doc lub zip) za
pośrednictwem mailu
Wszystkie referaty opublikowane w Zeszytach Naukowych Wydziału Elektrotechniki i Automatyki
biorą udział w konkursie z nagrodami na najlepszy referat w XXVII Seminarium „Zastosowanie
Komputerów w Nauce i Technice’ 2017”.
Informacja w Internecie
Informacje o działalności Oddziału Gdańskiego Polskiego Towarzystwa Elektrotechniki Teoretycznej
i Stosowanej można znaleźć na stronie internetowej:
http://www.eia.pg.gda.pl/ptetis
Informacje o seminarium są dostępne również za pośrednictwem telefonu komórkowego:
501-678-006
lub za pośrednictwem poczty elektronicznej:
Materiały w Informatorze zestawił Ludwik Referowski