Embed Size (px)
Citation preview
29
Cálculo de la estructura: . J lirv1ldJDAD NA(2OKALra cuna
o _~
' ) ~ PTO. DE Bl1JLlOTBCU - Peso propio de las vigas 1, 2, 3, 4, 5, 6 Y 7: II'\'I()T~CA "@.pW" (JOM!l
Vigas 1 Y 2 6,2 kg./m x 1,198 m = 7,43 kg.
Vigas 3 y 4 6,2 kg./m x 0,925 m = 5,74 kg.
Vigas 5, 6 Y 7 6,2 kg./m x 0,600 m = 3,72 kg.
- Cargas muertas: Vigas: 2 x 7,43 + 2 x 5,74 + 3x3,72) = 37,5 kg.
Motor: 30 kg
Aceite: 162 kg
Total: 37,5+ 162+30 = 229,5 kg.
- Carga Viva: Persona: 100 kg.
Carga Total: 229,5 + 100 = 329,5 kg.
Carga sobre una columna: 329,5/4 = 82,4 kg
Factor de seguridad: FS = 10
Pcr = CT*Fs =82,4 x 10 = 824 kg. (8 .075 N)
Para columna con estremos empotrados: factor C = 0,5 2
Modulo de elasticidad del acero: E = 200 x 1<1 N/m
Limite de fluencia: Sy = 245 x 106 N/m2
Longitud de la columna: L = 1,90 m
Sección columna A: (50,8)2_(44,45)2=604,8mm~,0006048m2
Momento de inercia 1= 0,000000206m4
K = (lA' = 0,000000206 =0 O18 mfA 0,0006048 '
OOrnm12
O
Planta -
30
Esbeltez:
(~) = 1,90 = 105 5 K 0,018 '
b = 12PcrL2 = O 0027 m y se disefio con b=0 0508 m (2") Jt 2CEh3 ' ,
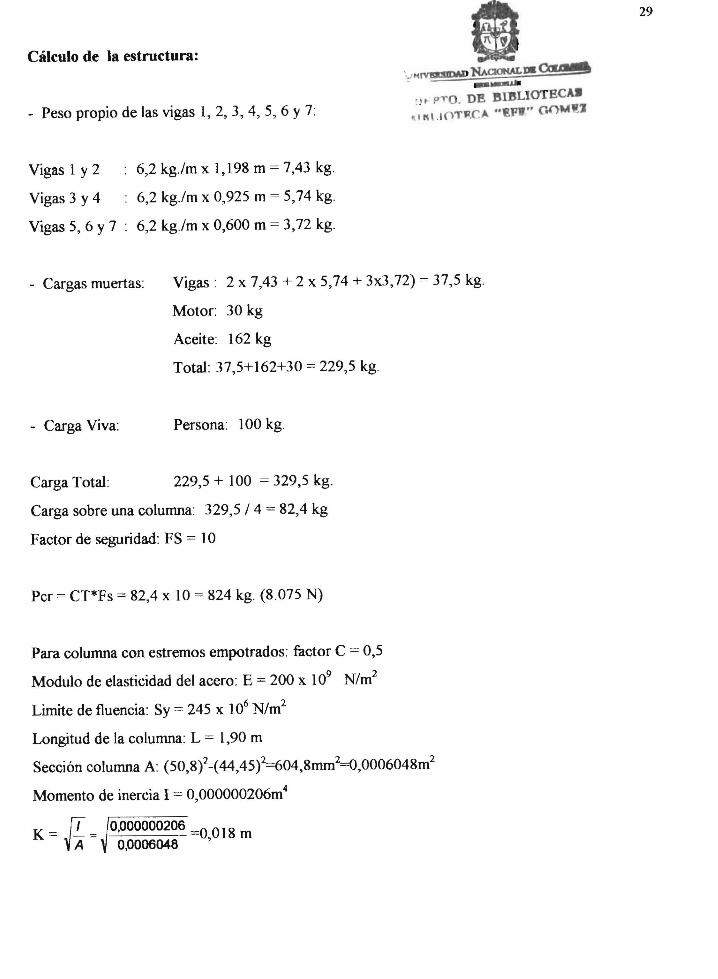
Se seleccionaron para las columnas y vigas ángulos de 2"xIl8" atiezados. La estructura tipo
caballete tiene las siguientes dimensiones: altura de 1900 mm, longitud de 1200 mm y ancho de
600 mm; dimensiones elegidas teniendo presente la arquitectura de cafetos de la variedad
Colombia de 36 meses, sembrados en el campo a 1,5 m x 1 m de distancia. En la Figura 7 se
muestra la estructura diseñada con sus principales dimensiones.
Deto.lle A
O perfil en L1500 I"1M
o. tlezado dE? 2xl/8'
P A~¡-,I\
'""V
I..::J-.- 600 M M ----t;>o
Figura 7. Dimensiones principales de la estructura de soporte.
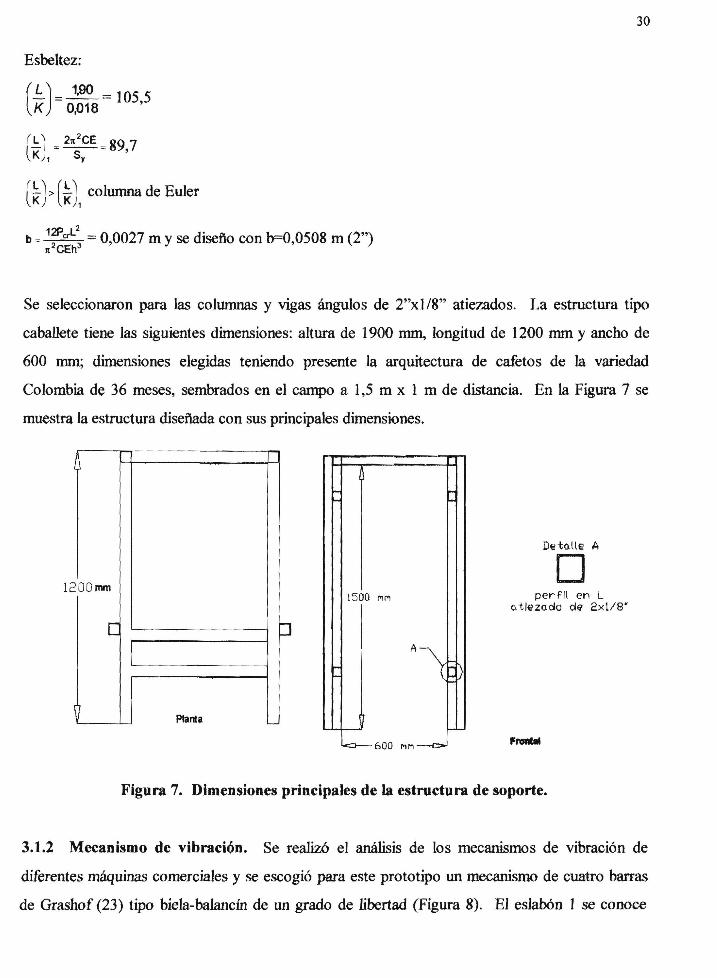
3.1.2 Mecanismo de vibración. Se realizó el análisis de los mecanismos de vibración de
diferentes máquinas comerciales y se escogió para este prototipo un mecanismo de cuatro barras
de Grashof (23) tipo biela-balancín de un grado de libertad (Figura 8). El eslabón 1 se conoce
31
como tierra o elemento fijo y corresponde a la longitud entre los pivotes de los eslabones de
entrada 2 y de salida 4. El eslabón 2 o biela es el eslabón de entrada del movimiento al
mecanismo, presenta rotación pura El eslabón 3 se conoce como acoplador, trasmite el
movimiento entre el eslabón de entrada y de salida y presenta un movimiento complejo. El
eslabón 4 se conoce como balancm que presenta un movimiento de oscilación alrededor de su
junta de unión con el eslabón fijo l.
Figura 8. Mecanismo de vibración manivela-balancín.
Se realizó una smtesis cualitativa y dimensional pro bando más de 40 combinaciones de longitud
de los cuatro eslabones.
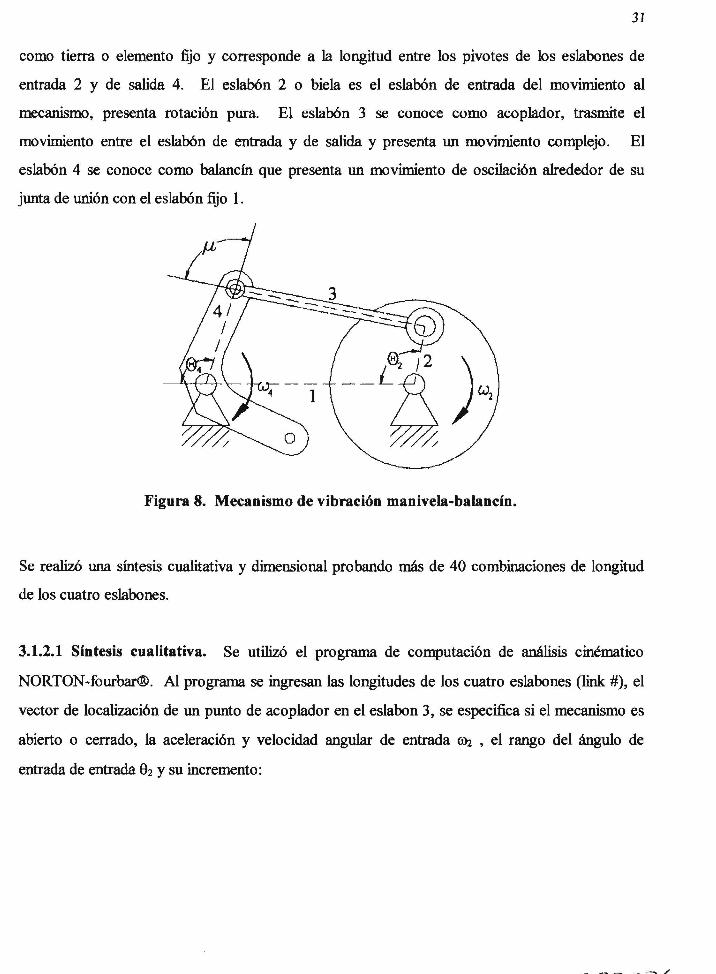
3.1.2.1 Síntesis cualitativa. Se utilizó el programa de computación de análisis cinématico
NORTON-fourbar®. Al programa se ingresan las longitudes de los cuatro eslabones (link #), el
vector de localización de un punto de acoplador en el eslabon 3, se especifica si el mecanismo es
abierto o cerrado, la aceleración y velocidad angular de entrada <:tl2 , el rango del ángulo de
entrada de entrada 92 y su incremento:
32
FOURBAR 5.1
Link # Length in Meters
1 0,27
2 0,04
3 0,23
4 0,14
Coup1er Pt. 0,23 at O Degrees
Open/Crossed OPEN
Start Alpha2 O Radians/Sec A 2
Start Omega2 31 Radians/Sec
Start Theta2 O Degrees
Final Theta2 360 Degrees
Delta Theta2 2 Degrees
3.1.2.2 Síntesis dimensional: se detenrunaron las longitudes de Los eslabones necesarias para
efectuar los movimientos esperados en el mecanismo. Fueron realizadas más de 40
combinaciones (Tabla 1) analizando los siguientes parámetros: ángulo de transmisión ¡.t, ángulo
de salida en el balancín (04) y velocidad angular del balancín ((04).
Utilizando una velocidad de entrada <i>2 de 1.700 RPM (178 Hz), velocidad de giro del motor
eléctrico utilizado como fuente de potencia, fueron calculadas para cada combinación, el ángulo
de salida 04 y velocidad angular de los eslabones acoplador úl:3 y balancín (04 y el ángulo de
transmisión ~ 1, para cada dos grados (180 posiciones) de la biela. De todas se eligió La
combinación que cumplió con los siguientes criterios de diseño:
33
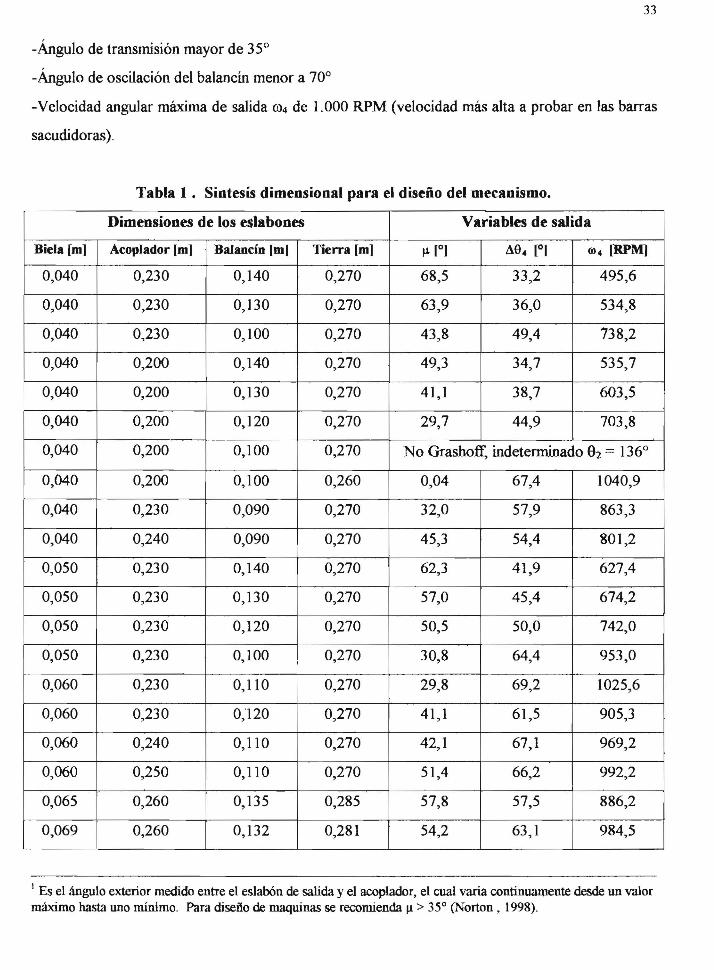
-Ángulo de transmisión mayor de 35 0
-Ángulo de oscilación del balancín menor a 70°
-Velocidad anguJar máxima de salida (04 de 1.000 RPM (velocidad más alta a probar en las barras
sacudidoras).
Tabla 1. Sintesís dimensional para el diseño del mecanismo.
Dimensiones de los eslabones Varia bies de salida
Biela [m] Acoplador [m] Balancín [m] Tierra [m] 11 [0] .19, [0] (í)4 [RPM]
0,040 0,230 0,140 0,270 68,5 33,2 495,6
0,040 0,230 0,130 0,270 63,9 36,0 534,8
0,040 0,230 0,100 0,270 43,8 49,4 738,2
0,040 0,200 0,140 0,270 49,3 34,7 535,7
0,040 0,200 0,130 0,270 41,1 38,7 603,5
0,040 0,200 0,120 0,270 29,7 44,9 703,8
0,040 0,200 0,100 0,270 No Grashoff, indeterminado (h = 1360
0,040 0,200 0,100 0,260 0,04 67,4 1040,9
0,040 0,230 0,090 0,270 32,0 57,9 863,3
0,040 0,240 0,090 0,270 45,3 54,4 801,2
0,050 0,230 0,140 0,270 62,3 41,9 627,4
0,050 0,230 0,130 0,270 57,0 45,4 674,2
0,050 0,230 0,120 0,270 50,5 50,0 742,0
0,050 0,230 0,100 0,270 30,8 64,4 953,0
0,060 0,230 0,110 0,270 29,8 69,2 1025,6
0,060 0,230 0,'120 0,270 41,1 61,5 905,3
0,060 0,240 0,110 0,270 42,1 67,1 969,2
0,060 0,250 0,110 0,270 51,4 66,2 992,2
0,065 0,260 0,135 0,285 57,8 57,5 886,2
0,069 0,260 0,132 0,281 54,2 63,1 984,5
I Es el ángulo exterior medido entre el eslabón de salida Yel acoplador, el cual varia continuamente desde un valor máximo hasta uno mínimo. Para diseí10 de maquinas se recomienda ~ > 35° (Norton , 1998).
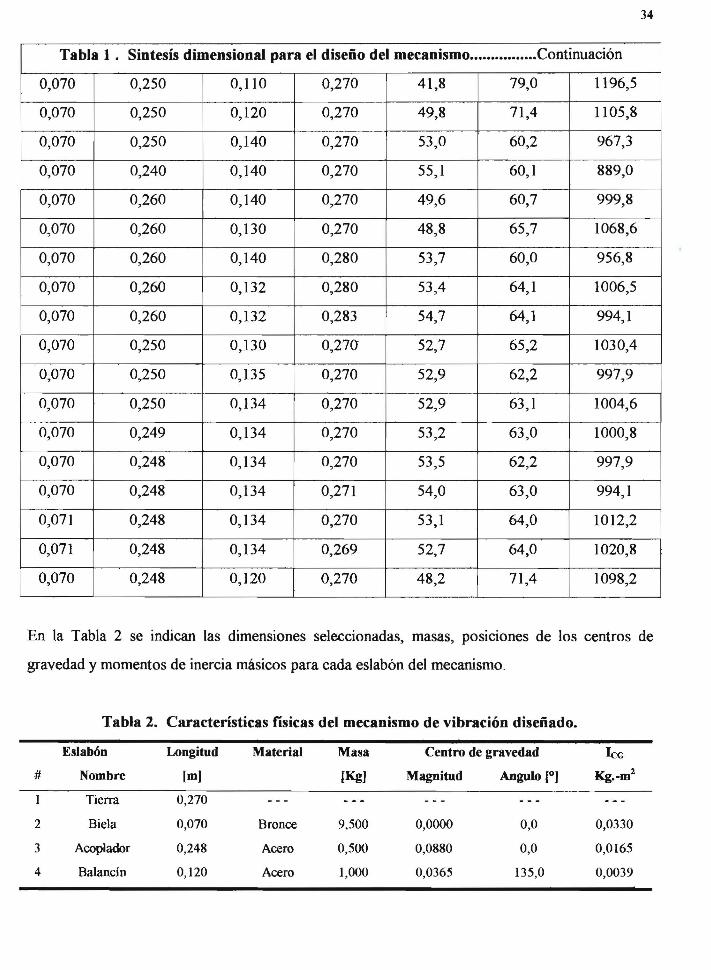
34
Tabla 1 . Sintesís dimensional para el diseño del mecanismo ....•..•........ Continuación
0,070 0,250 0,110 0,270 41,8 79,0 1196,5
0,070 0,250 0,120 0,270 49,8 71,4 1105,8
0,070 0,250 0,140 0,270 53,0 60,2 967,3
0,070 0,240 0,140 0,270 55,1 60,1 889,0
0,070 0,260 0,140 0,270 49,6 60,7 999,8
0,070 0,260 0,130 0,270 48,8 65,7 1068,6
0,070 0,260 0,140 0,280 53,7 60,0 956,8
0,070 0,260 0,132 0,280 53,4 64,1 1006,5
0,070 0,260 0,132 0,283 54,7 64,1 994,1
0,070 0,250 0,130 0,270 52,7 65,2 1030,4
0,070 0,250 0,135 0,270 52,9 62,2 997,9
0,070 0,250 0,134 0,270 52,9 63,1 1004,6
0,070 0,249 0,134 0,270 53,2 63,0 1000,8
0,070 0,248 0,134 0,270 53,5 62,2 997,9
0,070 0,248 0,134 0,271 54,0 63,0 994,1
0,071 0,248 0,134 0,270 53,1 64,0 1012,2
0,071 0,248 0,134 0,269 52,7 64,0 1020,8
0,070 0,248 0,120 0,270 48,2 71,4 1098,2
En la Tabla 2 se indican las dimensiones seleccionadas, masas, posiciones de los centros de
gravedad y momentos de inercia másicos para cada eslabón del mecanismo.
Tabla 2. Características físicas del mecanismo de vibración diseñado.
Eslabón Longitud Material Masa Centro de gravedad IcG # Nombre [mJ [KgJ Magnitud Angulo [oJ Kg._m2
Tierra 0,270
2 Biela 0,070 Bronce 9,500 0,0000 0,0 0,0330
3 Acoplador 0,248 Acero 0,500 0,0880 0,0 0,0165
4 Balancín 0,120 Acero 1,000 0,0365 135,0 0,0039
35
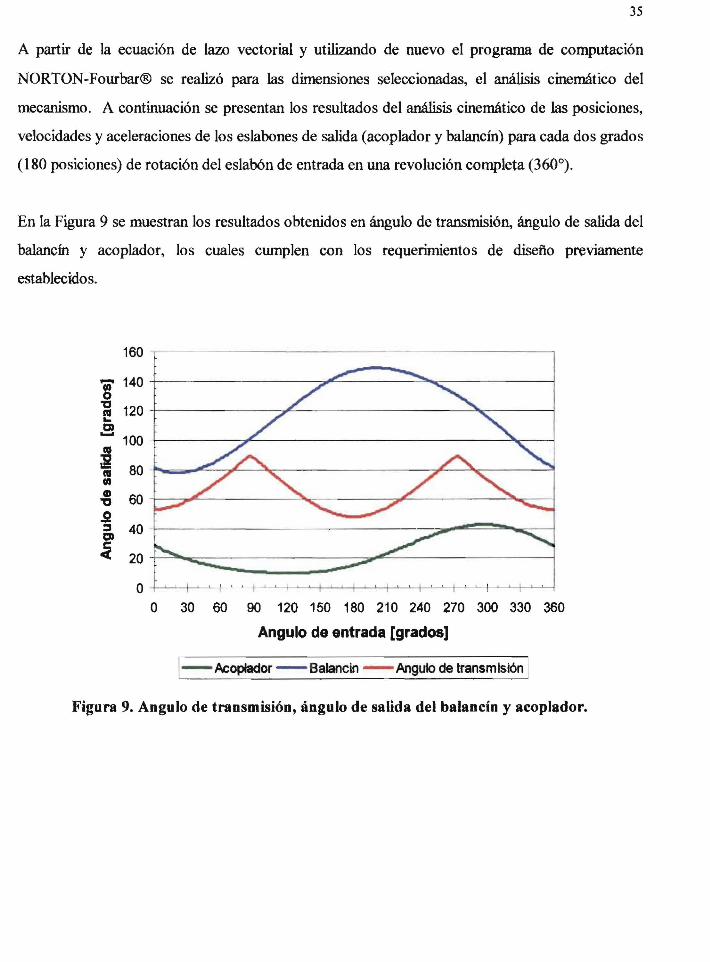
A partir de la ecuación de lazo vectorial y utilizando de nuevo el programa de computación
NORTON-Fourbar® se realizó para las dimensiones seleccionadas, el análisis cinemático del
mecanismo. A continuación se presentan los resultados del análisis cinernático de las posiciones,
velocidades y aceleraciones de los eslabones de salida (acoplador y balancín) para cada dos grados
(180 posiciones) de rotación del eslabón de entrada en una revolución completa (360°).
En la Figura 9 se muestran los resultados obtenidos en ángulo de transmisión, ángulo de salida del
balancín y acoplador, los cuales cwnplen con los requerimientos de disefio previamente
establecidos.
i ~ Q
i
1ft
~ ..2 :::1 Q
~
160
140
120 +-------------~------------------~.-----~
100 T-------~~------------------------~~
80 ~--~-.~~~--------------~--~----~ 60+-~~----------~--------~----------~~~
20~--~------------~~------------~
o 30 60 90 120 150 180 210 240 270 300 330 360
Angulo de entrada [grados]
1- Acoplador - Balancin Angu10 de transmisión 1 Figura 9. Angulo de transmisión, ángulo de salida del balancín y acoplador.


















![Take-3000-Installationsanleitung-Spiegelschrank-7 · A [mm] 500 mm 600 mm 800 mm 1.000 mm 1.200 mm Ø6mm B [mm] 400 mm 500 mm 700 mm 900 mm 1.100 mm](https://img.pdfslide.tips/doc/110x75/5e1a362e3bfd1320474f235f/take-3000-installationsanleitung-spiegelschrank-7-a-mm-500-mm-600-mm-800-mm-1000.jpg)








