Embed Size (px)
Citation preview

Calibracao Espaco-Temporal de Previsoes
Numericas do Modelo de Mesoescala Eta
para a Velocidade do Vento em Minas
Gerais
Luiz Eduardo da Silva Gomes
Universidade Federal do Rio de Janeiro
Instituto de Matematica
Departamento de Metodos Estatısticos
2018

Calibracao Espaco-Temporal de PrevisoesNumericas do Modelo de Mesoescala Eta
para a Velocidade do Vento em MinasGerais
Luiz Eduardo da Silva Gomes
Dissertacao de Mestrado submetida ao Programa
de Pos-Graduacao em Estatıstica do Instituto de
Matematica da Universidade Federal do Rio de
Janeiro como parte dos requisitos necessarios a
obtencao do tıtulo de Mestre em Estatıstica.
Orientadoras: Profa. Dra. Thais C. O. Fonseca
Profa. Dra. Kelly C. M. Goncalves
Rio de Janeiro, RJ - Brasil
2018
ii

Calibracao Espaco-Temporal de PrevisoesNumericas do Modelo de Mesoescala Eta
para a Velocidade do Vento em MinasGerais
Luiz Eduardo da Silva Gomes
Dissertacao de Mestrado submetida ao Programa de Pos-Graduacao em Estatıstica
do Instituto de Matematica da Universidade Federal do Rio de Janeiro como parte dos
requisitos necessarios a obtencao do tıtulo de Mestre em Estatıstica.
Aprovada por:
Profa. Dra. Thais C. O. Fonseca
UFRJ – Orientadora
Profa. Dra. Kelly C. M. Goncalves
UFRJ – Co-orientadora
Profa. Dra. Marina S. Paez
UFRJ
Prof. Dr. Marcos O. Prates
UFMG
Prof. Dr. Gustavo S. Ferreira
ENCE/IBGE
Rio de Janeiro, RJ - Brasil
2018
iii

FICHA CATALOGRAFICA
iv

Aos meus pais.
v

“Seja quem voce for, seja qualquer posicao que voce tenha na vida, nıvel altıssimo ou
mais baixo social (sic), tenha sempre como meta muita forca, muita determinacao e
sempre faca tudo com muito amor e com muita fe em Deus, que um dia voce chega la.
De alguma maneira, voce chega la.”
Ayrton Senna.
vi

Agradecimentos
A Deus.
Aos meus amados pais que sempre fizeram de tudo para que eu pudesse chegar ate aqui.
Obrigado pelo suporte, educacao e apoio que voces me proporcionam. Sem voces, grande
momentos como este, nao seriam possıveis. Eu continuarei orgulhando voces. Ate o fim. Eu
amo voces. Incondicionalmente.
A Iuna Alves, minha velha amiga que tornou-se recem companheira. Voce e incrıvel (e
engracada). Obrigado por sempre mostrar-me o lado bom da vida e me fazer sorrir em dias
chuvosos e ensolarados. Te amo.
As minhas orientadoras Thais Fonseca e Kelly Goncalves pelo auxılio e disponibilidade
oferecidos durante o desenvolvimento do trabalho. O conhecimento compartilhado por voces
foram primordiais no meu desenvolvimento academico.
Aos amigos que fiz durante o curso, em especial, Rafael Erbisti, Rebecca Souza, Renato
Gomes, Rodrigo Lassance e Victor Eduardo. Foi um prazer compartilhar aflicoes, notas de aula
e conceitos (nem tao bons assim) com voces.
Aos amigos que fiz previamente e tambem estavam la, em especial, ao Marcel, meu antigo
orientador de IC na Fiocruz, e a Raıra Marotta, uma graduacao inteira nao foi o suficiente ne?
Aos velhos amigos, em especial, a “uniao do transporte coletivo” formada em perıodos
colegiais por Bruno Delgado, Filipe Steikofp, Patrick Martins e Romario Paiva. Nos estaremos
sempre juntos!
A Profa. Marina Paez e ao Prof. Marcos Prates por aceitarem integrar a banca.
Ao Prof. Gustavo Ferreira por, ainda, ser um exemplo profissional e pessoal para mim.
Obrigado pela oportunidade de ir alem do esperado (no passado) e ter chegado ate aqui. Como
proposto por mim no fim da graduacao, obrigado por tambem compor a atual banca.
A Ramiro Cadernas por auxiliar na coordenacao do projeto maior o qual, meu projeto esta
aninhado, e pela disponibilizacao dos dados necessarios para este trabalho.
Por fim, a FAPEMIG e a CEMIG pelo apoio financeiro.
vii
Resumo
Previsoes de variaveis meteorologicas provenientes de modelos numericos estao,
sistematicamente, sujeitas a erros. Tais erros, devem-se a tentativa de simular
deterministicamente processos termodinamicos da atmosfera a partir de suas condicoes
correntes por meio de sistemas de equacoes diferenciais. Alem disto, estes sistemas sao
solucionados em uma grade discreta, apresentando previsoes uniformes para toda regiao
pertencente a mesma celula desta grade. Por consequencia, previsoes procedentes de
modelos numericos podem nao ser representativas em locais especıficos (Chou et al.,
2007). Assim, tecnicas de pos-processamento estatıstico sao apropriadas para a calibracao
destas previsoes, minimizando possıveis distorcoes (Glahn e Lowry, 1972).
O presente trabalho tem por objetivo minimizar os erros das previsoes do modelo
de mesoescala Eta para a velocidade do vento a 10 metros do solo no Estado de Minas
Gerais atraves do desenvolvimento de extensoes aprimoradas dos principais modelos
de pos-processamento estatıstico para campos meteorologicos. Os modelos propostos
foram estruturados atraves da tecnica de aumento de dados (Tanner e Wong, 1987) e
dos Modelos Lineares Dinamicos (MLD, West e Harrison, 1997).
Palavras-Chaves: velocidade do vento; modelo de mesoescala Eta; calibracao; modelos
lineares dinamicos espaco-temporais; tecnica de aumento de dados.
viii

Abstract
Forecasts of meteorological variables from numerical models are systematically subject
to errors. Such errors are due to the attempt to simulate deterministically thermodynamic
processes of the atmosphere from their current conditions through systems of differential
equations. In addition, these systems are solved in a discrete grid, presenting uniform
forecasts for every region belonging to the same grid cell. Consequently, forecasts
from numerical models may not be representative at specific locations (Chou et al.,
2007). Thus, statistical post-processing techniques are appropriate for calibration of
these forecasts, minimizing possible distortions (Glahn e Lowry, 1972).
This work aims to minimize the errors of Eta mesoscale model’s forecasts for the
wind speed at 10 meters above the ground in the State of Minas Gerais through the
development of improved extensions of the main statistical post-processing models for
meteorological fields. The proposed models were structured by the data augmentation
technique (Tanner e Wong, 1987) and Dynamic Linear Models (MLD, West e Harrison,
1997).
Keywords: wind speed; Eta mesoscale model; calibration; dynamical spatio-temporal
linear models; data augmentation technique.
ix

Sumario
Lista de Figuras xiii
Lista de Tabelas xix
1 Motivacao e Introducao 1
1.1 Previsao Numerica em Minas Gerais . . . . . . . . . . . . . . . . . . . . 2
1.2 Previsao Numerica do Tempo . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.1 Historia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.2 Aplicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.3 Classificacao dos modelos . . . . . . . . . . . . . . . . . . . . . . 14
1.2.4 Ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.5 Fontes de incerteza . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.2.6 Aperfeicoamento dos modelos . . . . . . . . . . . . . . . . . . . . 17
1.3 Pos-Processamento Estatıstico . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4 Modelo de Mesoescala Eta . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Modelos de Pos-Processamento Estatıstico 21
2.1 Metodos de Calibracao Univariados . . . . . . . . . . . . . . . . . . . . . 21
2.1.1 Model Output Statistics . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.2 Ensemble Model Output Statistics . . . . . . . . . . . . . . . . . . 22
2.2 Metodos de Calibracao Espaciais . . . . . . . . . . . . . . . . . . . . . . 23
2.2.1 Geostatistical Output Pertubation . . . . . . . . . . . . . . . . . . 23
2.2.2 Ensemble Model Output Statistics Espacial . . . . . . . . . . . . . 24
x

2.3 Metodos de Calibracao Espaco-temporais . . . . . . . . . . . . . . . . . . 25
2.3.1 Geostatistical Output Pertubation Dinamico . . . . . . . . . . . . 26
2.3.2 Ensemble Model Output Statistics Espaco-temporal . . . . . . . . 29
3 Aplicacao a Previsao da Velocidade do Vento em Minas Gerais 31
3.1 Descricao do Conjunto de Dados . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Selecao de Covariaveis e Definicoes dos Modelos . . . . . . . . . . . . . . 33
3.3 Modelos Propostos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4.1 Aplicacao: Diaria . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4.2 Aplicacao: Horaria . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.4.3 Aplicacao: Interpolacao Espacial . . . . . . . . . . . . . . . . . . 58
3.5 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4 Consideracoes Finais e Trabalhos Futuros 65
Referencias Bibliograficas 68
A Outros Modelos de Pos-Processamento Estatıstico 76
A.1 Bayesian Model Average . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
A.2 Bayesian Model Average Espacial . . . . . . . . . . . . . . . . . . . . . . 77
B Criterios de Comparacao de Modelos 79
B.1 Raiz Quadrada do Erro Quadratico Medio . . . . . . . . . . . . . . . . . 79
B.2 Erro Absoluto Medio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
B.3 Indice de Concordancia de Willmott . . . . . . . . . . . . . . . . . . . . . 79
B.4 Interval Score . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
C Distribuicoes Condicionais Completas 81
C.1 Vetor parametrico β . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
C.2 Parametro φ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
C.3 Parametro λ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
C.4 Processo Espacial latente Zt(s) . . . . . . . . . . . . . . . . . . . . . . . 82
xi

C.5 Processo Espacial latente Ut(s) . . . . . . . . . . . . . . . . . . . . . . . 83
D Algoritmo Robusto-Adaptativo de Metropolis 84
E Modelos Dinamicos 86
E.1 Modelo Linear Dinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
E.2 Filtro de Kalman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
E.3 Distribuicoes de Previsao . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
E.4 Fatores de Desconto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
E.5 Esquema de Amostragem para MLD . . . . . . . . . . . . . . . . . . . . 89
E.6 MLD com Covariancias Estocasticas e Aprendizado por Descontos . . . . 90
F Resultados Adicionais 93
G Simulacao dos Modelos Propostos 103
G.1 Scripts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
G.2 Graficos de Simulacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
xii

Lista de Figuras
1.1 Localizacoes das estacoes de monitoramento meteorologico em Minas
Gerais e vizinhanca. Triangulos solidos representam as estacoes.
Linhas contınuas representam a grade discreta utilizada pelo modelo de
mesoescala Eta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Representacao da interpolacao bilinear feita na grade discreta com celulas
15km × 15km utilizada pelo modelo Eta para obtencao de previsoes
numericas nos locais de observacao. . . . . . . . . . . . . . . . . . . . . . 3
1.3 Serie temporal da velocidade do vento a 10 metros de altura ao longo das
estacoes do ano iniciado as 12 UTC. . . . . . . . . . . . . . . . . . . . . . 5
1.4 FAC da velocidade do vento a 10 metros de altura ao longo das estacoes
do ano iniciado as 12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Histograma da velocidade do vento a 10 metros de altura ao longo das
estacoes do ano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.6 Distribuicao espacial de previsoes da refletividade (em dBZ) durante a
passagem do Furacao Gustav. Oceano Atlantico, 2008. . . . . . . . . . . 8
1.7 Exemplos de grade horizontal com diferentes resolucoes. . . . . . . . . . . 14
1.8 Representacao das trajetorias das previsoes numericas inicializadas com
distintas condicoes iniciais. Adaptado de Wilks (2006). . . . . . . . . . . 15
1.9 Organizacao dos membros do ensemble conforme sua classificacao: (a)
Defasados e (b) Tradicional. Adaptado de Warner (2010). . . . . . . . . . 15
xiii

1.10 Ensemble de previsoes para a rota do furacao Katrina. Inicializado em 26
de agosto de 2005, 00 UTC (a) e 12 UTC (b). Adaptado de Leutbecher e
Palmer (2008). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.11 Diagrama do processo de calibracao para ensemble de previsoes da
temperatura de superfıcie. Adaptado de Warner (2010). . . . . . . . . . . 19
1.12 Representacao da topografia pela coordenada vertical eta (η). Adaptado
de Mesinger et al. (1988). . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1 Diagrama de dispersao relacionando distintos membros do ensemble de
previsoes numericas da velocidade do vento a 10 m em 01 de abril de 2016,
12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Criterios de comparacao de modelos na aplicacao diaria ao longo das
estacoes do ano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3 Criterios de comparacao de modelos na aplicacao diaria ao longo das
estacoes do ano para os modelos propostos. . . . . . . . . . . . . . . . . . 44
3.4 Interval Score na aplicacao diaria ao longo das estacoes do ano. . . . . . 45
3.5 Media a posteriori e intervalos de credibilidade de 95% para o vetor
parametrico estatico do modelo EMOS espaco-temporal na aplicacao
diaria ao longo das estacoes do ano. . . . . . . . . . . . . . . . . . . . . . 47
3.6 Diagrama de dispersao com valores previstos versus observados na
aplicacao diaria para 18 a 21 de janeiro de 2016, 12 UTC. . . . . . . . . . 48
3.7 Previsao 1 a 4 dias a frente para a velocidade do vento a 10 m de altura
em janeiro de 2016, 12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.8 Diagrama de dispersao com valores previstos versus observados na
aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. . . . . . . . . 49
3.9 Previsao 1 a 4 dias a frente para a velocidade do vento a 10 m de altura
em outubro de 2016, 12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . 50
3.10 Criterios de comparacao de modelos na aplicacao horaria ao longo das
estacoes do ano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
xiv

3.11 Criterios de comparacao de modelos na aplicacao horaria ao longo das
estacoes do ano para os modelos propostos. . . . . . . . . . . . . . . . . . 52
3.12 Interval Score na aplicacao horaria ao longo das estacoes do ano. . . . . . 53
3.13 Mediana a posteriori e intervalos de credibilidade de 95% para o vetor
parametrico estatico do modelo EMOS espaco-temporal na aplicacao
horaria ao longo das estacoes do ano. . . . . . . . . . . . . . . . . . . . . 54
3.14 Diagrama de dispersao com valores previstos versus observados na
aplicacao horaria de 20 de julho de 2016, 13 UTC a 21 de julho de 2016,
12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.15 Previsao ate 24 horas a frente para a velocidade do vento a 10 m de altura
de 20 de julho de 2016, 13 UTC a 21 de julho de 2016, 12 UTC. . . . . . 56
3.16 Diagrama de dispersao com valores previstos versus observados na
aplicacao horaria de 20 de agosto de 2016, 13 UTC a 21 de agosto de
2016, 12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.17 Previsao ate 24 horas a frente para a velocidade do vento a 10 m de altura
de 20 de agosto de 2016, 13 UTC a 21 de agosto de 2016, 12 UTC. . . . . 57
3.18 Previsao ate 24 horas a frente para a velocidade do vento a 10 m de altura
de 20 de julho de 2016, 13 UTC a 21 de julho de 2016, 12 UTC obtidos a
partir da interpolacao espacial. Estacoes de monitoramento A505, A517,
A550 e A560 fora da amostra. . . . . . . . . . . . . . . . . . . . . . . . . 59
3.19 Previsoes 6, 12, 18 e 24 horas a frente para a velocidade do vento a 10 m de
altura para o Estado de Minas Gerais. PN: Previsao numerica proveniente
do modelo Eta. PP: Previsao pontual calibrada proveniente do ajuste do
modelo GOP dinamico. ME: Margem de erro, definida como metade do
comprimento do intervalo de credibilidade 95% da previsao probabilıstica. 61
3.20 Mapa contendo a localizacao das regioes enumeradas. . . . . . . . . . . . 62
F.1 Cadeias MCMC para os parametro estaticos do modelo EMOS espacial na
aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha tracejada
vertical representa o perıodo de aquecimento. . . . . . . . . . . . . . . . 93
xv

F.2 Cadeias MCMC para os parametro estaticos do modelo EMOS espaco-
temporal na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC.
Linha tracejada vertical representa o perıodo de aquecimento. . . . . . . 94
F.3 Cadeias MCMC para os parametro estaticos do modelo GOP dinamico na
aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha tracejada
vertical representa o perıodo de aquecimento. . . . . . . . . . . . . . . . 94
F.4 Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espacial na aplicacao diaria para 18 a 21 de outubro de 2016, 12
UTC. Linha tracejada representa a distribuicao a priori. Area sombreada
representa o intervalo de credibilidade de 95%. . . . . . . . . . . . . . . . 95
F.5 Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espaco-temporal na aplicacao diaria para 18 a 21 de outubro de
2016, 12 UTC. Linha tracejada representa a distribuicao a priori. Area
sombreada representa o intervalo de credibilidade de 95%. . . . . . . . . 95
F.6 Trajetoria a posteriori estimada para os parametros dinamicos do modelo
EMOS espaco-temporal na aplicacao diaria para 18 a 21 de outubro de
2016, 12 UTC. Linha contınua representa a media a posteriori. Area
sombreada representa o intervalo de credibilidade de 95%. . . . . . . . . 96
F.7 Distribuicao a posteriori estimada para os parametros estaticos do modelo
GOP dinamico na aplicacao diaria para 18 a 21 de outubro de 2016, 12
UTC. Linha tracejada representa a distribuicao a priori. Area sombreada
representa o intervalo de credibilidade de 95%. . . . . . . . . . . . . . . . 96
F.8 Trajetoria a posteriori estimada para os parametros dinamicos do modelo
GOP dinamico na aplicacao diaria para 18 a 21 de outubro de 2016, 12
UTC. Linha contınua representa a media a posteriori. Area sombreada
representa o intervalo de credibilidade de 95%. . . . . . . . . . . . . . . . 97
F.9 Cadeias MCMC para os parametro estaticos do modelo EMOS espacial na
aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de outubro,
12 UTC. Linha tracejada vertical representa o perıodo de aquecimento. . 98
xvi

F.10 Cadeias MCMC para os parametro estaticos do modelo EMOS espaco-
temporal na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a
21 de outubro, 12 UTC. Linha tracejada vertical representa o perıodo de
aquecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
F.11 Cadeias MCMC para os parametro estaticos do modelo GOP dinamico na
aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de outubro,
12 UTC. Linha tracejada vertical representa o perıodo de aquecimento. . 99
F.12 Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espacial na aplicacao horaria para 20 de de outubro de 2016, 13
UTC a 21 de outubro, 12 UTC. Linha tracejada representa a distribuicao
a priori. Area sombreada representa o intervalo de credibilidade de 95%. 100
F.13 Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espaco-temporal na aplicacao horaria para 20 de de outubro de
2016, 13 UTC a 21 de outubro, 12 UTC. Linha tracejada representa
a distribuicao a priori. Area sombreada representa o intervalo de
credibilidade de 95%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
F.14 Trajetoria a posteriori estimada para os parametros dinamicos do modelo
EMOS espaco-temporal na aplicacao horaria para 20 de de outubro de
2016, 13 UTC a 21 de outubro, 12 UTC. Linha contınua representa a
media a posteriori. Area sombreada representa o intervalo de credibilidade
de 95%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
F.15 Distribuicao a posteriori estimada para os parametros estaticos do modelo
GOP dinamico na aplicacao horaria para 20 de de outubro de 2016, 13
UTC a 21 de outubro, 12 UTC. Linha tracejada representa a distribuicao
a priori. Area sombreada representa o intervalo de credibilidade de 95%. 101
F.16 Trajetoria a posteriori estimada para os parametros dinamicos do modelo
GOP dinamico na aplicacao horaria para 20 de de outubro de 2016, 13
UTC a 21 de outubro, 12 UTC. Linha contınua representa a media a
posteriori. Area sombreada representa o intervalo de credibilidade de 95%. 102
xvii

G.1 Tracos das cadeias MCMC dos parametros estaticos (simulados) do modelo
GOP dinamico. Linha vermelha representa o valor verdadeiro. . . . . . . 103
G.2 Distribuicao a posteriori estimada para os parametros estaticos
(simulados) do modelo GOP dinamico. Linha vermelha representa o
valor verdadeiro. Linha tracejada representa a distribuicao a priori e
linha contınua, a distribuicao a posteriori. Area sombreada representa
o intervalo de credibilidade de 95%. . . . . . . . . . . . . . . . . . . . . . 104
G.3 Trajetoria a posteriori estimada para os parametros dinamicos (simulados)
do modelo GOP dinamico. Linha vermelha representa o valor verdadeiro.
Linha tracejada representa a media a posteriori. Area sombreada
representa o intervalo de credibilidade de 95%. . . . . . . . . . . . . . . . 104
G.4 Tracos das cadeias MCMC dos parametros estaticos (simulados) do modelo
EMOS espaco-temporal. Linha vermelha representa o valor verdadeiro. . 105
G.5 Distribuicao a posteriori estimada para os parametros estaticos
(simulados) do modelo EMOS espaco-temporal. Linha vermelha
representa o valor verdadeiro. Linha tracejada representa a distribuicao
a priori e linha contınua, a distribuicao a posteriori. Area sombreada
representa o intervalo de credibilidade de 95%. . . . . . . . . . . . . . . . 106
G.6 Trajetoria a posteriori estimada para os parametros dinamicos (simulados)
do modelo EMOS espaco-temporal. Linha vermelha representa o valor
verdadeiro. Linha tracejada representa a trajetoria estimada. Area
sombreada representa o intervalo de credibilidade de 95%. . . . . . . . . 107
xviii

Lista de Tabelas
3.1 Configuracao dos membros do ensemble para previsoes 24 horas a frente
as 12 UTC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Relacao dos criterios de comparacao de modelos para diferentes blocos de
covariaveis e horizontes obtidos nas previsoes realizadas na aplicacao piloto. 36
3.3 Informacoes acerca das cadeias MCMC para os modelos propostos em
diferentes aplicacoes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.4 Tempo medio consumido (em minutos) para aplicacao dos modelos
propostos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
xix
Capıtulo 1
Motivacao e Introducao
As previsoes numericas do modelo de mesoescala Eta (Mesinger et al., 1988; Black,
1994) sao uteis para a previsao de fenomenos climaticos no Brasil. Esses sistemas sao
solucionados em uma grade discreta, i.e., apresentam previsoes uniformes para toda regiao
pertencente a mesma celula desta grade. Como cada previsao e obtida com base em dados
medios da regiao (e.g. altitude media e vegetacao predominante), a representatividade
das previsoes em locais com orografia1 complexa e vegetacao densa se torna deficiente
devido as diferencas nas caracterısticas reais da superfıcie com a homogeneizacao feita
por este modelo. Dessa forma, previsoes geradas pelo modelo Eta podem nao ser
representativas em um local especıfico (Chou et al., 2007).
Para produzir previsoes em pontos distintos, minimizando estas e outras limitacoes
que este tipo de modelo esta sistematicamente submetido, tecnicas de pos-processamento
estatıstico sao apropriadas e auxiliam na melhor acuracia das estimativas num contexto
probabilıstico (Glahn e Lowry, 1972).
Especificamente, a metodologia proposta neste trabalho tem como principal objetivo
corrigir potenciais diferencas verificadas entre valores medidos e previsoes numericas da
velocidade do vento no Estado de Minas Gerais de dezembro de 2015 a novembro de
2016.
1Orografia e a descricao das nuances do relevo de uma regiao.
1

1.1 Previsao Numerica em Minas Gerais
Minas Gerais situa-se na regiao Sudeste do Brasil, sendo inteiramente formado por
planaltos. O relevo acidentado confere ao Estado um recurso hıdrico privilegiado,
abrigando grandes potenciais hidreletricos. A vegetacao predominante e a do Cerrado
consistindo em grandes variacoes na paisagem entre as estacoes chuvosa e seca, resultando
uma influencia sazonal da rugosidade aerodinamica do terreno2 no deslocamento dos
ventos. Toda a porcao leste do Estado e coberta pela Mata Atlantica, sendo a vegetacao
permanentemente verde e densa (Minas Gerais, 2018).
O clima em Minas Gerais varia desde o quente semiarido ate o mesotermico umido.
De maneira geral, a distribuicao das chuvas em Minas Gerais e desigual com o norte
apresentando longos perıodos de estiagem. Nas areas de maior altitude do sul, o regime
pluviometrico e mais intenso. A sazonalizade tambem exerce influencia nas temperaturas,
onde predominantemente as maiores medias ocorrem no verao. Periodicamente, na maior
parte do territorio mineiro, predominam ventos mais intensos no inverno e na primavera
(Amarante et al., 2010).
Ao longo de Minas Gerais e seu entorno, ha 59 estacoes de monitoramento
meteorologico, onde sao recolhidas, de hora em hora, informacoes instantaneas sobre
a velocidade do vento a 10 metros de altura, umidade relativa do ar, temperatura
de superfıcie, pressao atmosferica e precipitacao, distribuıdas conforme a Figura 1.1.
Devido a irregularidade do espacamento das estacoes meteorologicas e a grade discreta
consideravelmente fina, as previsoes numericas para os locais de observacao sao obtidas,
usualmente, por meio de interpolacao bilinear. Metodos de interpolacao mais complexos
podem ser aplicados, no entanto, e pouco provavel que haja ganhos consideraveis (Gel
et al., 2004). A Figura 1.2 ilustra esta interpolacao para previsoes numericas da
velocidade do vento a 10 metros de altura em Minas Gerais.
Assim, ha a possibilidade de analisar o erro pontual destas previsoes, principalmente
em locais que sao afetados por aspectos de posicionamento geografico (e.g. latitude,
2A rugosidade aerodinamica do terreno e a altitude em que a velocidade do vento cai a zero com base
na extrapolacao do perfil de vento neutro (Barry e Chorley, 2009).
2

Figura 1.1: Localizacoes das estacoes de monitoramento meteorologico em Minas Gerais
e vizinhanca. Triangulos solidos representam as estacoes. Linhas contınuas representam
a grade discreta utilizada pelo modelo de mesoescala Eta.
(a) Previsao Numerica (b) Interpolacao Bilinear
Figura 1.2: Representacao da interpolacao bilinear feita na grade discreta com celulas
15km × 15km utilizada pelo modelo Eta para obtencao de previsoes numericas nos locais
de observacao.
longitude e altitude), de proximidade com corpos d’agua e de vegetacao regional. Pode-
se citar algumas estacoes com estas caracterısticas como a estacao meteorologica A507
3

– Uberlandia, pertencente a regiao do Triangulo Mineiro localizada na parte oeste do
Estado, a qual possui majoritariamente vegetacao de cerrado, A530 – Caldas, localizado
ao sul do Estado, no qual ha grande quantidade de registros de velocidade do vento
baixas, A537 – Diamantina, localizada na regiao central, possuindo a maior altitude
(1359 metros) com relacao ao nıvel do mar dentre todas as estacoes; A543 – Espinosa,
localizada no extremo norte, fazendo fronteira com o Estado da Bahia, onde registra-se
maiores medias da velocidade do vento comparado a Minas Gerais e inclusive, contem
instalacoes de parques eolicos; e A547 – Sao Romao, localizada proximo as margens do
Rio Sao Francisco, o qual forma um corredor canalizando o vento. As possıveis influencias
sazonais tambem sao relevantes e entao, a Figura 1.3 ilustra a serie temporal da velocidade
do vento a 10 metros e de suas respectivas previsoes numericas ao longo da estacoes do
ano.
E possıvel observar que nao ha um padrao seguido pelas diferentes localidades.
Estacoes meteorologicas como A507 e A547 apresentam medias maiores durante a
primavera. Para as mesmas estacoes durante o outono, ocorre o menor erro medio das
previsoes numericas, no entanto, para A543, a periodicidade da previsao ao longo de um
dia aparenta inversao. Em ordem de visualizar este padrao periodico existente, a Figura
1.3 ilustra a funcao de autocorrelacao (FAC) para a serie temporal das mesmas estacoes
exibidas previamente.
Ha padroes periodicos bem definidos durante algumas estacoes do ano. As estacoes
A537, A543 e A547 nao registraram este padrao durante a primavera, diferentemente de
A507 e A530. Estes padroes periodicos sao efeitos sazonais devido ao forcamento solar
o qual, tem influencia direta na velocidade do vento. Uma melhor abordagem sobre as
consequencias desta atuacao no comportamento e nas previsoes da velocidade do vento
sera dada na Secao 1.2.5.
Majoritariamente em Minas Gerais, as previsoes numericas do modelo de mesoescala
Eta sobrestimam a velocidade do vento a 10 metros. Uma grande limitacao destas e a
ausencia de previsoes com velocidades baixas e iguais a zero, mesmo sendo observada
uma grande proporcao destes casos, como e evidenciado na Figura 1.5 que apresenta os
histogramas da velocidade do vento a 10 metros de altura para as estacoes meteorologicas
4

(a) A507 - Verao (b) A507 - Outono (c) A507 - Inverno (d) A507 - Primavera
(e) A530 - Verao (f) A530 - Outono (g) A530 - Inverno (h) A530 - Primavera
(i) A537 - Verao (j) A537 - Outono (k) A537 - Inverno (l) A537 - Primavera
(m) A543 - Verao (n) A543 - Outono (o) A543 - Inverno (p) A543 - Primavera
(q) A547 - Verao (r) A547 - Outono (s) A547 - Inverno (t) A547 - Primavera
Figura 1.3: Serie temporal da velocidade do vento a 10 metros de altura ao longo das
estacoes do ano iniciado as 12 UTC.
A517 – Muriae, A549 – Aguas Vermelhas, A557 – Coronel Pacheco e F501 – Belo
Horizonte (Cercadinho). Esta ultima destoa significativamente das demais, apresentando
medias mais elevadas. De forma geral, a distribuicao da velocidade do vento a 10 metros
5

(a) A507 - Verao (b) A507 - Outono (c) A507 - Inverno (d) A507 - Primavera
(e) A530 - Verao (f) A530 - Outono (g) A530 - Inverno (h) A530 - Primavera
(i) A537 - Verao (j) A537 - Outono (k) A537 - Inverno (l) A537 - Primavera
(m) A543 - Verao (n) A543 - Outono (o) A543 - Inverno (p) A543 - Primavera
(q) A547 - Verao (r) A547 - Outono (s) A547 - Inverno (t) A547 - Primavera
Figura 1.4: FAC da velocidade do vento a 10 metros de altura ao longo das estacoes do
ano iniciado as 12 UTC.
em Minas Gerais e assimetrica com grande variabilidade possuindo ponto de massa em
0 e atingindo velocidade maxima de 12 m/s.
6

(a) A517 - Verao (b) A517 - Outono (c) A517 - Inverno (d) A517 - Primavera
(e) A549 - Verao (f) A549 - Outono (g) A549 - Inverno (h) A549 - Primavera
(i) A557 - Verao (j) A557 - Outono (k) A557 - Inverno (l) A557 - Primavera
(m) F501 - Verao (n) F501 - Outono (o) F501 - Inverno (p) F501 - Primavera
Figura 1.5: Histograma da velocidade do vento a 10 metros de altura ao longo das estacoes
do ano.
Com a breve descricao dos erros e limitacoes das previsoes numericas, considera-se
a calibracao destas por meio de modelos estatısticos e portanto, o principal objetivo
deste trabalho e propor modelos de pos-processamento estatıstico considerando dinamica
espaco-temporal para a distribuicao assimetrica da velocidade do vento a 10 metros em
Minas Gerais de forma que minimize o erro sistematico das previsoes numericas do modelo
de mesoescala Eta devido as suas limitacoes intrınsecas.
7

A seguir, uma visao geral de aspectos importantes no contexto da previsao numerica
de fenomenos meteorologicos como aplicacoes, pos-processamento e informacoes acerca
do modelo Eta sera fornecida.
1.2 Previsao Numerica do Tempo3
Previsoes numericas de variaveis climaticas sao baseadas em modelos matematicos que
fazem previsoes determinısticas com base nas condicoes atmosfericas correntes. Baseada
na teoria da dinamica dos fluidos, essas variaveis climaticas podem ser vistas como
um sistema de equacoes diferenciais que nao possuem solucao analıtica e utilizam-se
da integracao numerica para simular processos fısicos, dinamicos e termodinamicos da
atmosfera dependendo de suas condicoes correntes, sendo possıvel a solucao do sistema
para qualquer instante de tempo posterior (Krishnamurti, 1995). Na Figura 1.6 e
ilustrada a forma fluida como a atmosfera se comporta.
Figura 1.6: Distribuicao espacial de previsoes da refletividade (em dBZ) durante a
passagem do Furacao Gustav. Oceano Atlantico, 2008.
1.2.1 Historia
No inıcio do seculo XX, o meteorologista noruegues Vilhelm Bjerknes propos que
a previsao do tempo poderia ser baseada nas leis da fısica e entao, desenvolveu um
conjunto de equacoes, conhecidas como equacoes primitivas, cuja solucao, a princıpio,
previa movimentos atmosfericos em grande escala.
3Historicamente, a expressao “previsao numerica do tempo” foi utilizada para descrever todas as
atividades envolvendo a simulacao numerica de processos atmosfericos.
8

Em 1922, o matematico ingles Lewis Fry Richardson desenvolveu um metodo
diferente para analisar as equacoes, simplificando-as antes de resolve-las numericamente
(Richardson, 1922), sendo este o primeiro sistema de previsao numerica de variaveis
climaticas. No entanto, somente na decada de 1950, com o advento da computacao
e pleno funcionamento do Computador Integrador Numerico Eletronico (ENIAC),
primeiro computador digital eletronico de grande escala, surgiram resultados efetivos
de previsoes meteorologicas computadorizadas sob idealizacao do matematico hungaro,
naturalizado estadunidense, John von Neummann (Charney et al., 1950). Inicialmente,
von Neummann, sob dias de pos-Segunda Guerra Mundial (1939 – 1945), acreditava
que essa modelagem pudesse levar ao conhecimento antecipado de fenomenos climaticos,
podendo ser usada como arma de guerra contra a, entao, Uniao Sovietica (URSS) (Kwa,
2001).
1.2.2 Aplicacoes
Alem de aplicacoes militares, ha uma gama de modelos numericos de previsao
meteorologica que possuem distintas aplicacoes ambientais, epidemiologicas, agrarias,
na seguridade dos meios de transportes e nas industrias de geracao de energia.
Detalhadamente, algumas delas sao:
1. Altura das ondas: A direcao e a velocidade do vento pode influenciar a altura das
ondas formadas nos oceanos e em outros corpos d’agua (Bidlot et al., 2002).
– Atividades marıtimas: A altura das ondas impacta a seguranca das atividades
marıtimas recreativas e comerciais e, portanto, devem ser previstas. Tambem
e desejavel se calcular a probabilidade de ocorrencias de vagalhoes4.
– Energia maremotriz: A acao das ondas nas zonas litorais pode ser usada para
gerar eletricidade e, portanto, as previsoes de ondas estao relacionadas as
previsoes de energia maremotriz.
4Vagalhoes sao grandes ondas que se formam repentinamente em alto-mar.
9

2. Doencas Infecciosas: A atmosfera pode influenciar a propagacao de doencas
infecciosas humanas e agrıcolas (Thomson et al., 2000).
– Saude dos patogenos: A saude dos organismos que transmitem doencas
pode estar relacionada a variaveis atmosfericas, como temperatura, umidade
relativa, intensidade da radiacao ultravioleta e precipitacao.
– Vetores de doencas: Doencas podem se espalhar atraves de vetores, como
pulgas, mosquitos ou roedores, e a quantidade e vitalidade dos vetores podem
depender da temperatura, umidade relativa, verdor da vegetacao e umidade
do solo.
– Comportamento animal: O comportamento animal esta relacionado as
condicoes atmosfericas (e.g. para humanos, a quantidade de tempo gasto
em interiores na proximidade de outras pessoas devido a baixas temperaturas
externas), podendo influenciar a propagacao de doencas.
– Transporte eolico: O vento pode transportar vetores de doencas e expor novas
populacoes.
– Inundacoes: Pode aumentar a incidencia de diversas doencas como resultado
do comprometimento do abastecimento de agua doce, migracao forcada e a
producao de um ambiente favoravel para vetores de doencas.
3. Seguranca e eficiencia do transporte: Operacoes em aeroportos, roteamento de
aeronaves pelos controladores de trafego aereo e as decisoes tomadas pelos pilotos,
bem como o trafego rodoviario e ferroviario sao afetados pelas condicoes climaticas
(Sharman et al., 2006).
– Turbulencia: Resulta de uma variedade de situacoes meteorologicas, como
conveccao e cisalhamento do vento, afetando a seguranca na aviacao.
– Formacao de gelo em aeronaves: A crosta de gelo formada em aeronaves sao
causas significativas de acidentes e possui relacao com a umidade relativa,
temperatura na altura de voo e velocidade vertical do vento.
10

– Visibilidade: A capacidade do aeroporto, em termos de espacamento mınimo
das aeronaves na aproximacao e partida, e geralmente uma funcao da
visibilidade prevalecente a qual, depende da precipitacao e umidade relativa
local. Alem disso, e importante para o fechamento de autoestradas quando
nao ha condicoes mınimas de direcao segura, evitando potenciais acidentes.
– Logıstica de precaucao: Implantacao de equipamentos de remocao de neve
antes de uma tempestade de inverno, evacuacao do publico antes de um
furacao, estimar regioes em que as linhas ferroviarias e rodovias inundarao
como resultado de fortes precipitacoes e pre-posicionamento de mao de obra
qualificada para reparos apos alguma catastrofe natural, como tempestades,
furacoes e maremotos.
4. Agricultura: Eventos climaticos podem influenciar o desempenho e vida util de
colheitas (Mera et al., 2006).
– Plantacao e colheita: Requer condicoes secas e o planejamento necessario e
baseado em previsoes meteorologicas entre 12 a 72 horas. O uso de modelos
adequados de solo, juntamente com modelos de predicao atmosferica, pode
permitir o diagnostico de trafego terrestre por maquinas agrıcolas.
– Aplicacao de pesticidas: Sistemas integrados de manejo de pragas exigem que
os produtos quımicos sejam aplicados um numero especıfico de horas antes da
precipitacao e em temperaturas e umidades apropriadas. Condicoes de vento
fraco tambem permitem uma aplicacao mais precisa.
– Aplicacao de herbicidas: Herbicidas nao devem ser deixados a deriva com o
vento em areas em que ocorrerao danos nao intencionais a vegetacao.
– Aplicacao de fertilizantes: Fertilizantes quımicos ou naturais nao devem ser
aplicados com grande antecedencia da precipitacao pois, o fertilizante pode
escoar para vias navegaveis, contaminando-as com produtos quımicos.
11

– Movimento de insetos: Insetos que podem prejudicar as culturas sao
transportados pelos ventos de suas areas de reproducao para areas agrıcolas e
previsoes dos padroes climaticos podem permitir a avaliacao deste risco.
– Selecao de colheita: Para areas agrıcolas as quais, a agua de irrigacao nao
esta disponıvel, as culturas podem ser selecionadas para plantacao que serao
apropriadas para as condicoes climaticas que se esperam durante a estacao de
crescimento.
5. Aplicacoes Militares: Alem das utilidades semelhantes as citadas, algumas
atividades especıficas requerem a tomada de decisao antecipada com relacao a
variaveis climaticas (Liu et al., 2008).
– Trafego terrestre de veıculos militares: Veıculos pesados tem dificuldade em
operar em solos umidos. Tipos especiais de modelos de superfıcie terrestre,
denominados modelos de trafego de solo, empregam analises e previsoes de
variaveis meteorologicas que afetam a umidade do substrato (precipitacao,
temperatura, velocidade do vento e umidade) e sao usados para estimar a
capacidade do substrato para suportar diferentes tipos de veıculos.
– Trajetorias de mısseis guiados e nao guiados: Os ventos, a turbulencia e a
densidade do ar afetam a trajetoria dos mısseis. O impacto aerodinamico das
condicoes meteorologicas observadas e modeladas nas trajetorias e calculado
usando um modelo de trajetoria.
6. Industria de energia: A logıstica para abertura de comportas em usinas
hidreletricas, a venda de energia eolica no mercado energetico e a avaliacao do
potencial impacto a saude publica de lancamentos de gases na atmosfera pelas
instalacoes nucleares dependem de previsoes meteorologicas com boa acuracia
(Landberg et al., 2003).
– Demanda energetica: Como os provedores de energia eletrica se beneficiam
com a capacidade de antecipar a demanda de energia gerada por diferentes
12

fontes (e.g. hidreletrica, eolica e solar), usam modelos para estimar
a quantidade de muitos fatores governamentais meteorologicos e nao
meteorologicos. As variaveis meteorologicas relevantes sao a nebulosidade,
velocidade do vento, precipitacao, temperatura e a umidade.
– Avaliacao de recursos de energia eolica: A prospeccao dos recursos
de energia eolica envolve a geracao de reanalises do clima proximo a
superfıcie. Os resultados permitem que os desenvolvedores de parques
eolicos determinem onde a instalacao de turbinas seria economicamente bem-
sucedida. Idealmente, reanalises regionais de alta resolucao sao desejaveis,
pois a velocidade do vento de baixa altitude varia muito devido as
diferencas na paisagem, no entanto, sao demasiadamente custosas em termos
computacionais.
– Previsao de energia eolica: A energia eolica disponıvel e uma funcao da
velocidade do vento, em geral, em alturas entre 80 e 100 metros, nos parques
eolicos onde os aerogeradores estao instalados. Portanto, as estimativas de
energia futura requerem previsoes de velocidade do vento nestas alturas. A
velocidade de previsao do vento e traduzida para a producao de energia usando
um algoritmo baseado no numero de turbinas que operam no parque, a mistura
de seus tipos e a eficiencia de cada. Sao necessarias previsoes de producao de
energia eolica para equilibrar a carga entre as varias fontes disponıveis, como
termoeletricas, hidreletricas, solares e nucleares. A medida que a energia eolica
possui maior porcentagem na fonte de energia total, as previsoes do modelo
devem tornar-se cada vez mais precisas para evitar apagoes (ou blecautes)
quando a velocidade do vento diminui inesperadamente e impedir o desperdıcio
de combustıveis fosseis, liberando gases de efeito estufa desnecessariamente,
quando a velocidade do vento aumenta abruptamente. Devido ao carater
sinotico dos modelos numericos, ha um desafio de produzir previsoes acuradas
para essas localizacoes pois, locais vantajosos para parques eolicos estao em
terrenos complexos e zonas litoraneas.
13

1.2.3 Classificacao dos modelos
Operacionalmente, sistemas de previsoes numericas meteorologicas sao solucionados
em uma grade discreta. A Figura 1.7 ilustra diferentes resolucoes de grade, demonstrando
as potenciais diferencas que a amplitude de suas celulas causa nas previsoes.
Figura 1.7: Exemplos de grade horizontal com diferentes resolucoes.
Conforme a extensao de seu domınio espacial de previsao, os modelos numericos
podem ser classificados como globais, quando descrevem a atmosfera em escala global,
identificando fenomenos meteorologicos de escala sinotica (e.g. trajetoria de ciclones,
tornados e furacoes) ou modelos de mesoescala, quando possuem escalas regionais,
permitindo a analise de fenomenos meteorologicos de mesoescala (e.g. brisas marıtimas
e terrestres).
Dada a natureza caotica da atmosfera, os modelos numericos podem apresentar
distorcoes em suas previsoes devido a anomalias captadas nas condicoes iniciais
necessarias para a solucao de seus sistemas de equacoes. A Figura 1.8 esquematiza a
potencial mudanca na trajetoria das previsoes numericas empregando distintas condicoes
iniciais (Wilks, 2006).
1.2.4 Ensembles
Como previsoes unicas nao descrevem completamente o fenomeno, considera-se a
producao de ensembles (ou conjuntos) de previsoes. O ensemble pode ser interpretado
como uma forma de analise de Monte Carlo, visando uma gama de possıveis estados
14

Figura 1.8: Representacao das trajetorias das previsoes numericas inicializadas com
distintas condicoes iniciais. Adaptado de Wilks (2006).
futuros da atmosfera, a partir de diferentes estados atmosfericos iniciais. Multiplas
simulacoes sao realizadas com objetivo de minimizar incertezas nas previsoes (Epstein,
1969). Os ensembles sao classificados como defasados, quando previsoes sao feitas ate
determinado horizonte e se sobrepoem conforme o regime de funcionamento do modelo,
ilustrado intuitivamente na Figura 1.9(a) e tradicionais, quando utilizam condicoes
iniciais ou suposicoes distintas para uma mesma solucao do sistema, ilustrado na Figura
1.9(b).
(a) (b)
Figura 1.9: Organizacao dos membros do ensemble conforme sua classificacao: (a)
Defasados e (b) Tradicional. Adaptado de Warner (2010).
Ensembles sao mais proficientes do que previsoes individuais pois, a media de seus
membros e, geralmente, mais precisa do que uma previsao singular. A dispersao entre
15

seus membros pode indicar maior incerteza associada a previsao pontual. A distribuicao
de frequencia empırica formada fornece informacoes sobre eventos extremos (Grimit e
Mass, 2007). O realismo da dispersao dependera de quao bem as fontes de incerteza
estao sendo representadas pelo modelo. Um exemplo da variabilidade da dispersao e
apresentado na Figura 1.10 que equipara dois ensembles consecutivos para a rota do
furacao Katrina. O ensemble inicializado em 26 de agosto de 2005, 00 UTC exibe uma
grande dispersao a qual, e substancialmente reduzida no ensemble inicializado doze horas
mais tarde. A verdadeira trajetoria do furacao foi proxima a media do ensemble mais
recente.
(a) (b)
Figura 1.10: Ensemble de previsoes para a rota do furacao Katrina. Inicializado em 26
de agosto de 2005, 00 UTC (a) e 12 UTC (b). Adaptado de Leutbecher e Palmer (2008).
1.2.5 Fontes de incerteza
De acordo com Warner (2010), ha uma variedade de fontes conhecidas de erros que
acometem as previsoes dos modelos numericos, brevemente, pode-se citar:
– Incerteza sobre as condicoes iniciais: Ma calibracao e localizacao inadequada
dos instrumentos, pouca representatividade da regiao e condicoes atmosfericas
anomalas implicam em variacoes nas previsoes.
– Incerteza sobre a superfıcie: Depressoes e corpos d’agua sao sub-representados
devido a homogeneizacao da superfıcie feita pelo sistema.
16

– Incerteza nos algoritmos numericos: As equacoes diferenciais que compoem o
sistema sao solucionadas a partir de aproximacoes lineares e consequentemente,
ha erros de truncamento.
– Incerteza na parametrizacao dos processos fısicos e dinamicos: A dinamica
atmosferica possui alta complexidade e fenomenos de pequena escala
sao representados indiretamente pois, elevariam demasiadamente o custo
computacional.
A existencia de variacao diurna e sazonal do forcamento solar na superfıcie e na atmosfera
da Terra impacta diretamente o comportamento de muitas variaveis previstas por esses
sistemas. Alem das fontes de erros sistematicos, existem aspectos naturais que podem
causar variacao na qualidade das previsoes. Sao eles:
– Variabilidade regional e climatologica: O padrao climatico de uma regiao
depende de sua localizacao geografica, orografia e a proximidade com o oceano.
Previsoes para regioes com padrao climatico inconstante requerem ferramentas mais
avancadas.
– Variabilidade sazonal: Pode haver queda de desempenho nas previsoes devido as
diferencas regionais existentes entre as estacoes do ano.
– Dependencia do regime climatico: Alguns fenomenos naturais (e.g. El Nino e La
Nina) causam anomalias no padrao climatico global, podendo ocasionar distorcoes
nas previsoes.
1.2.6 Aperfeicoamento dos modelos
Novos metodos de assimilacao de dados, atualizacao dos algoritmos numericos,
reparametrizacoes de processos fısicos e o aumento da resolucao da grade horizontal
fornecem melhorias aos sistemas de previsao numerica. No entanto, e uma tarefa ardua
representar fenomenos de pequenas escalas em modelos com carater sinotico. Aumentar
sua complexidade eleva demasiadamente os custos financeiros e computacionais para
17
a operacionalizacao desses sistemas e, ainda sim, com possibilidade de queda no
desempenho das previsoes devido a insercao de mais erros sistematicos (Kalnay, 2003).
Uma alternativa as melhorias diretamente feitas no modelo e o pos-processamento
estatıstico das previsoes numericas.
1.3 Pos-Processamento Estatıstico
O pos-processamento estatıstico, ou calibracao, das saıdas operacionais do modelo de
previsao numerica (i.e., ensembles) e util na remocao dos erros sistematicos presentes
e pode resultar em avancos equivalentes a melhorias elaboradas no modelo (Glahn e
Lowry, 1972). Relativamente menos dispendioso do que outras abordagens tradicionais de
melhoria (e.g. aumento da resolucao do modelo), esse refinamento deve ser implementado
como parte integrante do sistema de modelagem para aplicacoes operacionais (Warner,
2010). Historicamente, os metodos de pos-processamento estatısticos foram utilizados
para predizer variaveis que nao eram preditas explicitamente pelos modelos numericos
de baixa resolucao relacionando-as estatisticamente (Klein et al., 1959). Atualmente, com
os modelos bem desenvolvidos, o uso de algoritmos estatısticos e empregado como uma
forma de downscaling5 relacionando aspectos locais (e.g. orografia) para reduzir erros
sistematicos. Alguns dos principais bem estabelecidos metodos de pos-processamento
estatıstico serao apresentados e comentados no Capıtulo 2. A ilustracao do processo de
calibracao do ensemble de previsoes para temperatura de superfıcie se encontra na Figura
1.11, sendo esquematizada a remocao do erro sistematico (i.e., remocao do vies na media)
e o ajuste da dispersao (i.e., remocao do vies na variancia).
1.4 Modelo de Mesoescala Eta
O modelo de mesoescala Eta e um modelo numerico de area limitada desenvolvido
inicialmente na decada de 1970. Apos algumas modificacoes, entrou em operacao no
5Downscaling e o procedimento que faz inferencia sobre informacoes em alta resolucao a partir de
dados provenientes de baixas resolucoes.
18

Figura 1.11: Diagrama do processo de calibracao para ensemble de previsoes da
temperatura de superfıcie. Adaptado de Warner (2010).
Centro Americano de Previsao Ambiental (NCEP) durante a decada de 1980 (Black,
1994). A principal caracterıstica deste modelo e a introducao da coordenada vertical
eta (η), homonima ao modelo, visando a reducao dos erros nas derivadas horizontais
sobre relevos montanhosos (Mesinger et al., 1988). Desta maneira, o terreno passa a ser
representado sob a forma de degraus discretos, onde o topo coincide com a interface do
relevo. A Figura 1.12 ilustra essa discretizacao.
Figura 1.12: Representacao da topografia pela coordenada vertical eta (η). Adaptado de
Mesinger et al. (1988).
Operacionalmente, o modelo Eta vem sendo utilizado pelo Centro de Previsao de
Tempo Estudos Climaticos (CPTEC) do Instituto Nacional de Pesquisas Espaciais
(INPE) desde 1996 com o intuito de fornecer previsoes do tempo de curto a longo prazo
para o Brasil. Seu domınio engloba toda a America do Sul. Suas variaveis prognosticas
sao temperatura do ar, componentes zonal e meridional do vento, umidade especıfica e
19

pressao na superfıcie. A partir destas, sao derivadas as demais variaveis previstas pelo
modelo. Sua atual resolucao horizontal e de 5 km. O funcionamento do modelo ocorre
duas vezes ao dia (00 UTC e 12 UTC) disponibilizando saıdas a cada hora para um
horizonte de previsao de ate 72 horas (INPE/CPTEC, 2018). Os resultados operacionais
sao disponibilizados em http://previsaonumerica.cptec.inpe.br/eta05.
20

Capıtulo 2
Modelos de Pos-Processamento
Estatıstico
Os modelos descritos neste Capıtulo tem por objetivo comum minimizar os
erros sistematicos presentes nas previsoes numericas, como discutido no Capıtulo 1.
Basicamente, exploram padroes estatısticos nas relacoes entre observacoes e previsoes,
buscando melhor representatividade local.
A Secao 2.1 apresenta os precursores metodos univariados. Na Secao 2.2, as extensoes
espacias sao listadas. E por fim, a Secao 2.3 propoe novas extensoes espaco-temporais.
2.1 Metodos de Calibracao Univariados
Nesta secao serao apresentados os principais modelos de pos-processamento
estatıstico os quais, foram desenvolvidos para calibracao em localizacoes fixas, supondo
independencia entre estas, produzindo previsoes probabilısticas calibradas para as
mesmas em um horizonte pre-determinado, sem possibilidade de interpolacao espacial.
2.1.1 Model Output Statistics
A abordagem precursora de pos-processamento estatıstico e conhecida como o metodo
Model Output Statistics (MOS, Glahn e Lowry, 1972). Nesta abordagem, relaciona-
21

se estatisticamente as previsoes feitas pelo modelo com as observacoes correspondentes
de uma mesma variavel, a fim de quantificar os erros sistematicos para cada ponto de
observacao e corrigir futuras previsoes atraves de um modelo de regressao linear multipla
(Montgomery e Peck, 1982), dado por:
Y = θ0 + θ1F1 + ...+ θmFm + ε. (2.1)
Este modelo supoe uma relacao linear entre a variavel climatica de interesse Y a qual,
deseja-se minimizar o erro sistematico em sua previsao, com seu ensemble de m membros
F1, ..., Fm adicional de um termo de erro aleatorio ε para o qual, assume-se:
E(ε) = 0, V ar(ε) = σ2. (2.2)
Os metodos de inferencia para estimacao dos coeficientes da regressao θ0, ..., θm e do
parametro de variancia σ2 sao baseados no metodo dos mınimos quadrados e estao
descritos em Glahn e Lowry (1972).
Com o passar dos anos, a aplicacao de ensembles se tornou usual nas operacoes
e entao, o metodo MOS recebeu diversas versoes que diferem, em geral, no tamanho
do perıodo de treinamento (e.g. Updatable MOS (UMOS, Wilson e Vallee, 2002)), na
modelagem direta do erro de previsao (e.g. MOC (Mao et al., 1999)) e na distribuicao da
variavel resposta (e.g. Piani et al., 2010) por meio dos Modelos Lineares Generalizados
(MLG, Nelder e Baker, 1972). Uma das extensoes mais avancadas em termos estatısticos,
conforme discutido em Gneiting (2014), e o metodo Ensemble MOS, utilizado como base
para os modelos que serao propostos na Secao 2.3.
2.1.2 Ensemble Model Output Statistics
O metodo Ensemble MOS (EMOS, Gneiting et al., 2005), tambem conhecido como
modelo de regressao nao homogenea, e uma extensao do metodo MOS (Secao 2.1.1)
aplicavel a ensembles. A diferenca para o seu antecessor se encontra na incorporacao
da dispersao dos membros do ensemble ao coeficiente de variancia, em vista que, existe
uma relacao positiva entre a amplitude dessa dispersao com o erro absoluto de previsao.
Discussoes sobre essa relacao, conhecida na literatura como relacao dispersao-proficiencia
22

(spread-skill relationship), podem ser encontradas em Whitaker e Loughe (1998). Este
metodo utiliza o modelo de seu sucessor MOS descrito em (2.1) com o erro aleatorio ε
seguindo as seguintes suposicoes:
E(ε) = 0, V ar(ε) = σ2∗ = β0 + β1S
2, (2.3)
com S2 representando a variancia amostral dos membros do ensemble e o vetor
β = (β0, β1)′, coeficientes lineares nao negativos. Para a estimacao dos parametros
desconhecidos do metodo EMOS calibrando a temperatura de superfıcie e a pressao ao
nıvel do mar, Gneiting et al. (2005) supoem normalidade na distribuicao do erro aleatorio
e utilizam a minimizacao do escore probabilıstico de posto contınuo (CRPS, Matheson
e Winkler, 1976) que neste caso, pode ser obtido de forma analıtica. Mais aplicacoes
deste metodo para outros tipos de variaveis climaticas (e.g velocidade, rajada e direcao
do vento) supondo distintas distribuicoes de probabilidade para o erro aleatorio, podem
ser encontradas em Thorarinsdottir e Gneiting (2010), Thorarinsdottir e Johnson (2012)
e Schuhen et al. (2012), respectivamente.
2.2 Metodos de Calibracao Espaciais
Nesta secao serao apresentados as principais extensoes dos modelos de pos-
processamento estatıstico univariados as quais, foram desenvolvidas de forma que haja
interacao espacial da informacao, i.e., produzem previsoes probabilısticas calibradas para
campos meteorologicos com horizonte pre-determinado.
2.2.1 Geostatistical Output Pertubation
O metodo Geostatistical Output Pertubation (GOP, Gel et al., 2004) e uma extensao
do metodo MOS que considera a existencia de correlacao entre as medicoes de um
fenomeno meteorologico medido em diferentes localizacoes possibilitando previsoes para
campos meteorologicos. Foi o metodo de pos-processamento estatıstico pioneiro no
contexto espacial. Seja {Y (s), s ∈ S} um campo meteorologico aleatorio e Ys =
(y(s1), ..., y(sn))′ observacoes deste em um conjunto de n localizacoes pertencentes a S.
23

Considere m membros do ensemble para estas mesmas localizacoes, representados por
Fs1 = (F1(s1), ..., F1(sn))′ , ...,Fsm = (Fm(s1), ..., Fm(sn))′. A forma geral desse modelo e
dada por:
Ys = θ01n + θ1Fs1 + ...+ θmFsm + ε, (2.4)
com 1n representando um n-vetor completo por 1’s, θ = (θ0, ..., θm)′, o vetor parametrico
da regressao e ε = (ε(s1), ..., ε(sn))′, observacoes de um Processo Gaussiano {ε(s), s ∈ S},
com as seguintes suposicoes:
E(ε) = 0n, Cov(ε(si), ε(sj)) = Σi,j = σ2C(si, sj), i, j = 1, ..., n. (2.5)
com 0n representando um n-vetor completo por 0’s. As entradas de C(.) dependem de
uma estrutura de correlacao valida para Processos Espaciais (veja Cressie (1993)). Para
a estimacao dos parametros desconhecidos do modelo GOP calibrando a temperatura
de superfıcie, Gel et al. (2004) propoem um metodo de estimacao em tres estagios
que se aproxima de uma abordagem de maxima verossimilhanca completa. Os autores
indicam a estimacao dos parametros por uma abordagem totalmente Bayesiana devido as
previsoes numericas serem realizadas em uma grade discreta, enquanto que as observacoes
correspondem a locais irregularmente espacados, o chamado problema de mudanca de
suporte, e esta abordagem tem a vantagem de lidar explicitamente e de forma coerente
com tal adversidade. Para mais detalhes sobre mudanca de suporte, consulte Gelfand
et al. (2001).
Uma desvantagem desse metodo e o fato de que nao foi desenvolvido para uso de
ensembles como o EMOS. Extensoes naturais combinando estes metodos com o GOP
serao apresentadas na sequencia.
2.2.2 Ensemble Model Output Statistics Espacial
O metodo Ensemble Model Output Statistics espacial (EMOS espacial, Feldmann
et al., 2015), tambem conhecido como modelo de regressao espacial nao homogenea,
combina os metodos EMOS (Secao 2.1.2) e GOP (Secao 2.2.1). Este metodo utiliza o
24

mesmo modelo que o metodo GOP descrito em (2.4) com {ε(s), s ∈ S} sendo um Processo
Gaussiano com ε = (ε(s1), ..., ε(sn))′ seguindo as seguintes suposicoes:
E(ε) = 0n, Cov(ε(si), ε(sj)) = Σ∗i,j = Di,iC(si, sj)Dj,j, i, j = 1, ..., n, (2.6)
onde D = diag(√β0 + β1S2
1 , ...,√β0 + β1S2
n) e uma matriz diagonal de dimensao n com
S2i representando a variancia amostral dos membros do ensemble para a i-esima localidade
e C(.) e uma matriz de correlacao espacial baseada no metodo GOP. Para a estimacao dos
parametros do EMOS espacial calibrando a temperatura de superfıcie, Feldmann et al.
(2015) consideraram primeiro ajustar o modelo EMOS original de forma semelhante a
feita em Gneiting et al. (2005). Dado as estimativas para os parametros do EMOS, o
modelo GOP e ajustado igualmente como feito em Gel et al. (2004). Nao ha disponıveis
aplicacoes com este modelo para a calibracao de variaveis assimetricas (e.g. velocidade
do vento e chuva) para campos meteorologicos completos na literatura.
2.3 Metodos de Calibracao Espaco-temporais
Comumente nos modelos apresentados, a estimacao dos parametros e feita atraves
de uma janela movel que consiste de um passado recente de valores observados e
previstos pelo modelo numerico, usualmente chamado, no contexto do pos-processamento
estatıstico, de perıodo de treinamento. Conforme discutido em Gneiting (2014), a medida
em que os perıodos de treinamento sao mais longos, permitem, a princıpio, uma melhor
estimativa com menor incerteza. No entanto, como abordado na Secao 1.2.5, podem
tambem introduzir distorcoes devido aos efeitos sazonais provindos do forcamento solar
e de aspectos geograficos (e.g. localizacao geografica, orografia e proximidade com o
oceano). Gneiting et al. (2005) e Raftery et al. (2005) analisam como o comprimento do
perıodo de treinamento afeta a estimacao e incerteza dos parametros, observando que ha
ganhos com o aumento ate 25 dias, especificamente em sua aplicacao. Tambem comentam
que, provavelmente, diferentes comprimentos deste perıodo sejam melhores para outros
tipos de aplicacoes deste modelo (e.g. tipos de variaveis, ciclos, regioes, horizontes, etc.)
e ressaltam a importancia do desenvolvimento de modos automaticos de decisao. Em
25

geral, a sazonalidade de fenomenos meteorologicos e bem definida (e.g. forcamento solar
– 24 horas, estacoes do ano – 3 meses), tornando o uso do Filtro de Kalman (Kalman,
1960) usual para este tipo de aplicacao, contornando a limitacao do comprimento do
perıodo de treinamento e permitindo a dinamica temporal dos parametros de tendencia.
Nesta secao serao apresentados novas extensoes para os principais metodos de pos-
processamento estatıstico apresentados anteriormente as quais, foram desenvolvidas com
a adicao da componente temporal por meio dos Modelos Lineares Dinamicos (MLD,
West e Harrison, 1997), de forma que tambem haja interacao espacial da informacao,
produzindo previsoes probabilısticas calibradas para campos meteorologicos completos
com possibilidade de previsao em um horizonte intervalar, nomeadas, respectivamente,
por Geostatistical Output Pertubation Dinamico (Secao 2.3.1) e Ensemble Model Output
Statistics Espaco-temporal (Secao 2.3.2).
2.3.1 Geostatistical Output Pertubation Dinamico
Um modelo que mostrou-se adequado para descricoes de fenomenos meteorologicos
com distribuicao assimetrica de forma simples (e.g. precipitacao em Bardossy e
Plate (1992)) em diferentes escalas de tempo e o modelo Normal Truncado (Stidd,
1973; Hutchinson, 1995). Seja {Yt(s), s ∈ S ⊂ R2, t = 1, ..., T} um campo meteorologico
aleatorio no tempo discreto t. Assumindo que o vetor de observacoes deste campo em n
localizacoes Yt,s = (yt(s1), ..., yt(sn))′ possui distribuicao Normal Truncada, tem-se que:
Yt(s)|λ =
BC−1 (Xt(s);λ) , se BC−1 (Xt(s);λ) ≥ c,
c∗, se BC−1 (Xt(s);λ) < c.(2.7)
onde c e c∗ sao constantes conhecidas, λ e o parametro desconhecido desta transformacao
especıfica, Xt(s) e um Processo Gaussiano e BC(.;λ) representa a Transformacao Box-
Cox (Box e Cox, 1964) definida por:
BC(y;λ) =
(yλ − 1
)/λ, se λ 6= 0 e y > 0,
log y, se λ = 0 e y > 0,
Assim, supoe-se que Xt(s) e um Processo Gaussiano latente que coordena um outro
Processo Espacial assimetrico a partir de uma transformacao conhecida. Diferentes
26

famılias de transformacoes foram utilizadas em Glasbey e Nevison (1997) e Sanso e
Guenni (1999).
A estruturacao dada em (2.7) baseia-se na tecnica de aumento de dados (Tanner
e Wong, 1987) e lida de forma natural e intuitiva com dados ausentes, eventualidade
corriqueira quando estuda-se simultaneamente um grande numero de localizacoes ao longo
do tempo, e com a suposta “censura” do Processo Espacial assimetrico quando Yt(s) < c,
com adicao de outros Processos Espaciais latentes da seguinte maneira:
Xt(s) =
Ut(s), se Yt(s) e ausente,
BC(Yt(s);λ), se Yt(s) ≥ c,
Zt(s), se Yt(s) < c.
(2.8)
A extensao proposta para o modelo GOP (Secao 2.2.1), nomeada por Geostatistical
Output Pertubation Dinamico (GOP dinamico) combina este com uma dinamica temporal
de seus coeficientes lineares a partir da adaptacao de MLDs. Portanto, GOP dinamico
e um MLD com covariancias estocasticas e aprendizado por descontos a partir de uma
evolucao estocastica Beta-Gama (veja Secao E.6 do Apendice E). Sequencialmente com
(2.7), o modelo GOP dinamico e dado por:
Xt,s = F′t,sθt + εt, εt ∼ N(0n,Σt), (2.9a)
θt = Gtθt−1 + ωt, ωt ∼ Tnt−1(0p,Wt), (2.9b)
onde Xt,s = (xt(s1), ..., xt(sn))′, F′t,sθt descreve a tendencia polinomial com a matriz
F′t,s de dimensao n × r (r ≥ m) composta por covariaveis explicativas (e.g. ensemble
de previsoes, latitude, longitude e altura das localizacoes) e θt representando o vetor de
parametros de estados de dimensao r, Gt e a matriz de evolucao de dimensao r, ωt e o erro
de evolucao com distribuicao t-Student com nt−1 graus de liberdade com vetor de medias
nulo e matriz de forma Wt. Os graus de liberdade nt−1 sao definidos atraves da evolucao
estocastica Beta-Gama. A partir do Processo Gaussiano {εt(s), s ∈ S, t = 1, ..., T},
assume-se que εt = (εt(s1), ..., εt(sn))′ segue as seguintes suposicoes:
E(εt) = 0n, Cov(εt(si), εt(sj)) = Σti,j = σ2tC(si, sj), i, j = 1, ..., n. (2.10)
27

Construiu-se C(.) com base na funcao de correlacao exponencial dada por C(si, sj) =
exp(−φ‖si − sj‖) com φ > 0 representando a taxa de decaimento exponencial e ‖si − sj‖,
a distancia euclidiana entre as localizacoes si e sj, i, j = 1, ..., n.
Para a estimacao dos parametros desconhecidos do modelo GOP dinamico, opta-
se pela abordagem Bayesiana devido a incorporacao das incertezas nas estimativas
dos parametros serem levadas em consideracao na inferencia preditiva atraves de suas
distribuicoes a posteriori. Utiliza-se a tecnica de fatores de desconto como auxılio na
especificacao de W1:T . Mais detalhes sobre fatores de desconto podem ser encontrados na
Secao E.4 do Apendice E. Assim, seguindo o Teorema de Bayes, a distribuicao a posteriori
do vetor parametrico Θ = (θ1:T , σ21:T , φ, λ)′ e proporcional a funcao de verossimilhanca
p(Y1,s, ...,YT,s|θ1:T , σ21:T , φ, λ) multiplicada pela distribuicao a priori p(θ0, σ
20, φ, λ). Para
o modelo espaco-temporal GOP dinamico apresentado em (2.7) a (2.9), a distribuicao a
posteriori do vetor parametrico Θ = (θ1:T , σ21:T , φ, λ)′ e dada por:
p(θ1:T , σ21:T , φ, λ|Y1,s, ...,YT,s) ∝
T∏t=1
|Σt|−1/2
× exp
{−1
2
T∑t=1
(Xt,s − F′t,sθt)′Σt−1(Xt,s − F′t,sθt)
}
× exp
{−1
2
T∑t=1
(θt −Gtθt−1)′Wt
−1(θt −Gtθt−1)
}×
∏{i,t:Yit>c}
Y λ−1it × p(θ0, σ2
0, φ, λ).
(2.11)
Para obter amostras aproximadas da distribuicao a posteriori do vetor parametrico
Θ = (θ1:T , σ21:T , φ, λ)′, a qual nao possui forma analıtica conhecida, metodos de Monte
Carlo via Cadeias de Markov (MCMC, Gamerman, 1997) sao aplicaveis. A partir de
(2.11), obtem-se as distribuicoes condicionais completas dos parametros de interesse.
A descricao completa das distribuicoes condicionais completas poderao ser encontradas
no Apendice C. De forma especıfica para os parametros deste modelo, amostras para
(θ1:T , σ21:T )′ sao obtidas atraves do procedimento Forward Filtering Backward Sampling
(FFBS, Fruhwirth-Schnatter, 1994; Carter e Kohn, 1994) e para (φ, λ)′, usa-se o algoritmo
Robusto-Adaptativo de Metropolis (RAM, Vihola, 2012). Mais detalhes acerca do
28

procedimento FFBS podem ser encontrados na Secao E.5 do Apendice E e do algoritmo
RAM, no Apendice D. Informacoes acerca das distribuicoes a priori, fatores de desconto
utilizados e detalhes computacionais serao dados durante sua aplicacao no Capıtulo 3.
2.3.2 Ensemble Model Output Statistics Espaco-temporal
Analogo ao metodo GOP dinamico, o metodo Ensemble Model Output Statistics
espaco-temporal (EMOS espaco-temporal) combina o metodo EMOS espacial (Secao
2.2.2) com MLDs. Portanto, EMOS espaco-temporal e um MLD Normal Multivariado
(veja Secao E.1 do Apendice E).
Com a estruturacao dada em 2.8, o modelo EMOS espaco-temporal e,
sequencialmente, dado por:
Xt,s = F′t,sθt + εt, εt ∼ N(0n,Σ∗t ), (2.12a)
θt = Gtθt−1 + ωt, ωt ∼ N(0p,Wt), (2.12b)
onde, diferentemente do modelo apresentado anteriormente, ωt e o erro de evolucao
Normalmente distribuıdo com vetor de medias nulo e matriz de covariancia Wt. A partir
do Processo Gaussiano {εt(s), s ∈ S, t = 1, ..., T}, assume-se que εt = (εt(s1), ..., εt(sn))′
segue as seguintes suposicoes:
E(εt) = 0n, Cov(εt(si), εt(sj)) = Σ∗ti,j = Dti,iC(si, sj)Dtj,j , (2.13)
onde Dt = diag(√β0 + β1S2
1,t, ...,√β0 + β1S2
n,t) e uma matriz diagonal de dimensao n
com S2i,t representando a variancia amostral dos membros do ensemble para a i-esima
localidade no tempo t e C(.) e uma matriz de correlacao espacial construıda de mesmo
modo que o modelo GOP dinamico (Secao 2.3.1). Faz-se uso da tecnica de fatores de
desconto para a especificacao de W1:T .
29

A estimacao dos parametros do EMOS espaco-temporal tambem e feita sobre
a abordagem Bayesiana. A distribuicao a posteriori do vetor parametrico Θ∗ =
(θ1:T ,β, φ, λ)′ e dada por:
p(θ1:T ,β, φ, λ|Y1,s, ...,YT,s) ∝T∏t=1
|Σ∗t |−1/2
× exp
{−1
2
T∑t=1
(Xt,s − F′t,sθt)′Σ∗t−1(Xt,s − F′t,sθt)
}
× exp
{−1
2
T∑t=1
(θt −Gtθt−1)′Wt
−1(θt −Gtθt−1)
}×
∏{i,t:Yit>c}
Y λ−1it × p(θ0,β, φ, λ).
(2.14)
De forma especıfica para os parametros deste modelo, amostras para θ1:T sao obtidas
atraves do procedimento Forward Filtering Backward Sampling (FFBS, Fruhwirth-
Schnatter, 1994; Carter e Kohn, 1994) e para (β, φ, λ)′, atraves do algoritmo Robusto-
Adaptativo de Metropolis (RAM, Vihola, 2012). Informacoes acerca das distribuicoes a
priori utilizadas e detalhes computacionais tambem serao dados durante a aplicacao no
Capıtulo 3.
No capıtulo a seguir, alguns dos modelos de pos-processamento estatıstico para
calibracao de campos meteorologicos completos exibidos nas Secoes 2.2 e 2.3 serao
testados e comparados conforme o desempenho na calibracao feita nas previsoes
numericas da velocidade do vento a 10 metros em Minas Gerais providas pelo modelo
Eta.
30

Capıtulo 3
Aplicacao a Previsao da Velocidade
do Vento em Minas Gerais
Os resultados apresentados neste capıtulo avaliam a capacidade de calibracao dos
modelos de pos-processamento apresentados no Capıtulo 2.
A Secao 3.1 caracteriza o banco de dados disponıvel. Na Secao 3.2, definicoes iniciais
sao contextualizadas para aplicacao dos modelos propostos. A Secao 3.3 cataloga os
modelos propostos para a aplicacao. Na Secao 3.4, sao exibidos os resultados obtidos
na pratica em distintas aplicacoes. Por fim, a Secao 3.5 resume os resultados e exibe as
conclusoes.
3.1 Descricao do Conjunto de Dados
O banco de dados utilizado e composto pelo ensemble de previsoes numericas horarias
iniciadas as 12 UTC do modelo de Mesoescala Eta para a velocidade do vento instantanea
a 10 metros de altura no Estado de Minas Gerais e seu entorno de 01 de novembro de
2015, 12 UTC a 30 de novembro de 2016, 11 UTC, totalizando mais de 10 mil ensembles,
1 para cada hora de previsao. A quantidade de membros do ensemble pode variar devido
a nao inicializacao do modelo Eta e no horizonte de previsao requisitado. O horizonte
maximo de previsao deste modelo e 255 horas, i.e., o modelo Eta preve de 0 a 255 horas
a frente. Assim, se o interesse e calibrar as previsoes no horario de iniciacao do modelo
31

Tabela 3.1: Configuracao dos membros do ensemble para previsoes 24 horas a frente as
12 UTC.
Previsao
Origem 02/12/2015 03/12/2015 ... 10/12/2015 11/12/2015 ...
01/12/2015 +24h +48h ... +216h +240h ...
02/12/2015 +24h ... +192h +216h ...
03/12/2015 ... +168h +192h ...
04/12/2015 ... +144h +168h ...
05/12/2015 ... +120h +144h ...
06/12/2015 ... +96h +120h ...
07/12/2015 ... +72h +96h ...
08/12/2015 ... +48h +72h ...
09/12/2015 +24h +48h ...
10/12/2015 +24h ...
Eta (12 UTC) 24 horas a frente, o ensemble sera composto pelas previsoes feitas 240,
216, ... , 48 e 24 horas anteriores, totalizando 10 membros. A Tabela 3.1 esquematiza o
enquadramento dos membros para a construcao de um ensemble do tipo defasado, como
na Figura 1.9(a).
Para evitar a eventual indisponibilidade de algum membro, optou-se utilizar a media
dos que estiverem disponıveis no momento sob determinado horizonte de calibracao.
Este procedimento nao acarreta grande perda de informacao, em vista que, ha alta
correlacao linear entre os membros, implicando em uma boa estabilidade do modelo
Eta, como exibida pela Figura 3.1. Note que desta forma, tambem evita-se problemas
de multicolinearidade. Mais detalhes sobre tal adversidade, consulte Montgomery e Peck
(1982). Segundo Grimit e Mass (2007), a media dos membros pode captar uma eventual
anomalia meteorologica pontual (e.g. frente fria) e assim, seu uso tambem e indicado por
aspectos teoricos.
Medicoes da variavel meteorologica em estudo nas 59 estacoes de monitoramento em
Minas Gerais e seu entorno, assim como dados georreferenciados destas (e.g. latitude,
longitude e altura do relevo) tambem integram o banco de dados utilizado. O historico de
32

Figura 3.1: Diagrama de dispersao relacionando distintos membros do ensemble de
previsoes numericas da velocidade do vento a 10 m em 01 de abril de 2016, 12 UTC.
registros de previsoes numericas e variaveis meteorologicas esta disponıvel para o mesmo
perıodo de tempo. A precisao numerica dos dados e de uma casa decimal, com menor
valor registrado nao-nulo 0,1. Essa informacao sera importante para a definicao das
constantes de censura c e c∗ em (2.7). Outras definicoes requeridas como entrada para
os modelos apresentados na Secao 2.3 como o vetor de descontos δ, as matrizes F′t,s e
Gt e o fator de desconto requerido na evolucao estocastica Beta-Gama (veja Secao E.6
do Apendice E) exclusivo do modelo GOP dinamico (Secao 2.3.1) serao apresentados na
secao a seguir.
3.2 Selecao de Covariaveis e Definicoes dos Modelos
Iniciando a aplicacao, decidiu-se analisar quais covariaveis seriam introduzidas na
analise final. As covariaveis dividem-se em 3 blocos, sao eles:
33

– Ensemble (ENS): Refere-se a uma covariavel explicativa unidimensional com a
media dos membros do ensemble para determinada localizacao. E o mınimo
requerido como entrada de modelos de pos-processamento estatıstico.
– Autorregresivo (AR): Refere-se a uma covariavel explicativa unidimensional com
valores observados no passado recente, respeitando a defasagem imposta pelo
horizonte de previsao (e.g. Para previsoes 24 horas a frente, o conjunto
autorregressivo recebe as medicoes feitas 24 horas anteriormente) para determinada
localizacao.
– Auxiliares (AUX): Refere-se a uma covariavel explicativa tridimensional com a
latitude, longitude e altitude do relevo dos locais das estacoes de monitoramento
meteorologico. Estas covariaveis nao se alteram ao longo do tempo.
Determinou-se que, em uma analise inicial de desempenho e significancia dos
parametros relacionados a cada covariavel, a combinacao do bloco de covariaveis utilizada
no modelo de calibracao espaco-temporal GOP dinamico (Secao 2.3.1) que retornasse os
melhores resultados em suas previsoes, segundo os criterios de comparacao, em uma
aplicacao piloto, seria a utilizada de forma geral. Considerou-se na aplicacao piloto
o tempo em dias e o horizonte de previsao de 1 a 4 dias a frente, simbolizado por
horas como 24 a 96 horas a frente. As previsoes foram feitas para os dias 01 a 04 de
abril de 2016, 12 UTC, escolhidos arbitrariamente, com um perıodo de treinamento de
90 observacoes. Os criterios de comparacao foram selecionados de maneira que seja
praticavel a comparacao entre as previsoes numericas provindas do modelo Eta que
fornece apenas estimativas pontuais com as calibradas provenientes do ajuste dos modelos
estatısticos. Assim, os criterios escolhidos foram raiz quadrada do Erro Quadratico
Medio (rEQM), Erro Absoluto Medio (EAM) e Indice de Concordancia de Willmott
(ICW, Willmott, 1981). Quanto menores forem os valores da rEQM e do EAM, melhores
serao as previsoes. O ICW e uma medida padronizada variando entre 0 (ausencia de
concordancia) e 1 (correspondencia perfeita). Estes criterios sao os mais usuais em meio
a literatura disponıvel sobre calibracao de variaveis meteorologicas. Mais detalhes acerca
destes criterios podem ser encontrados no Apendice B.
34

A transformacao proposta em (2.7) auxilia na acomodacao de variaveis meteorologicas
com distribuicao assimetrica e com domınio positivo (R+) em modelos estatısticos que
dispoem intrinsecamente de Processos Gaussianos como os modelos de calibracao espacial,
apresentados na Secao 2.2, e espaco-temporal, apresentados na Secao 2.3. Estes ultimos
tem esta transformacao agregada em si, a qual dependem de constantes. Assim, conforme
a precisao numerica dos dados, comentada na Secao 3.1, atribuiu-se que c∗ = 0 e c = 0, 1
e entao, a transformacao em (2.7) e, exclusivamente para esta aplicacao com o particular
banco de dados, dada por:
Yt(s)|λ =
BC−1 (Xt(s);λ) , se BC−1 (Xt(s);λ) ≥ c,
c∗, se BC−1 (Xt(s);λ) < c.
O vetor de descontos δ utilizado e composto por 3 componentes divididas por δT1,
representando o desconto para os coeficientes de tendencia relativos ao intercepto do
modelo, media do ensemble e medicoes retroativas, δT2, para os coeficientes de tendencia
relativos a localizacao geografica (altitude, latitude e longitude) e δS, para a componente
sazonal. Assim, o vetor de descontos δ e dado por:
δ = (δT1, δT2, δS)′,
sendo atribuıdo δT1 = δT2 = 0, 99 e δS = 0, 95.
A matriz Ft,s depende da escolha dos blocos de covariaveis que serao utilizados.
Conforme os criterios definidos, foi visto que o modelo com somente as previsoes
numericas (bloco ENS) nao consegue descrever bem o fenomeno e assim, fornecer boas
previsoes. A adicao de informacoes locais, tanto da variavel de estudo de maneira
retroativa (bloco AR), quanto de aspectos regionais (bloco AUX), fornecem uma menor
propensao a erros. Dentre os resultados obtidos nesta aplicacao, exibidos na Tabela 3.2,
pode-se perceber uma relacao de complemento entre os blocos. Em particular para as
previsoes do horizonte +96h, note que a insercao do bloco AR fez com que o valor da
rEQM elevasse de 1,316 para 1,371. Adicionado o bloco AUX, regressa a 1,315. Ocorre
algo similar para o EAM neste mesmo horizonte. Assim, perceba que o uso dos 3 blocos
(ENS, AR e AUX) auxiliou na diminuicao dos criterios rEQM e EAM quando o uso de
2 blocos (ENS e AR) acarretou prejuızos no desempenho das previsoes. Para os demais
35
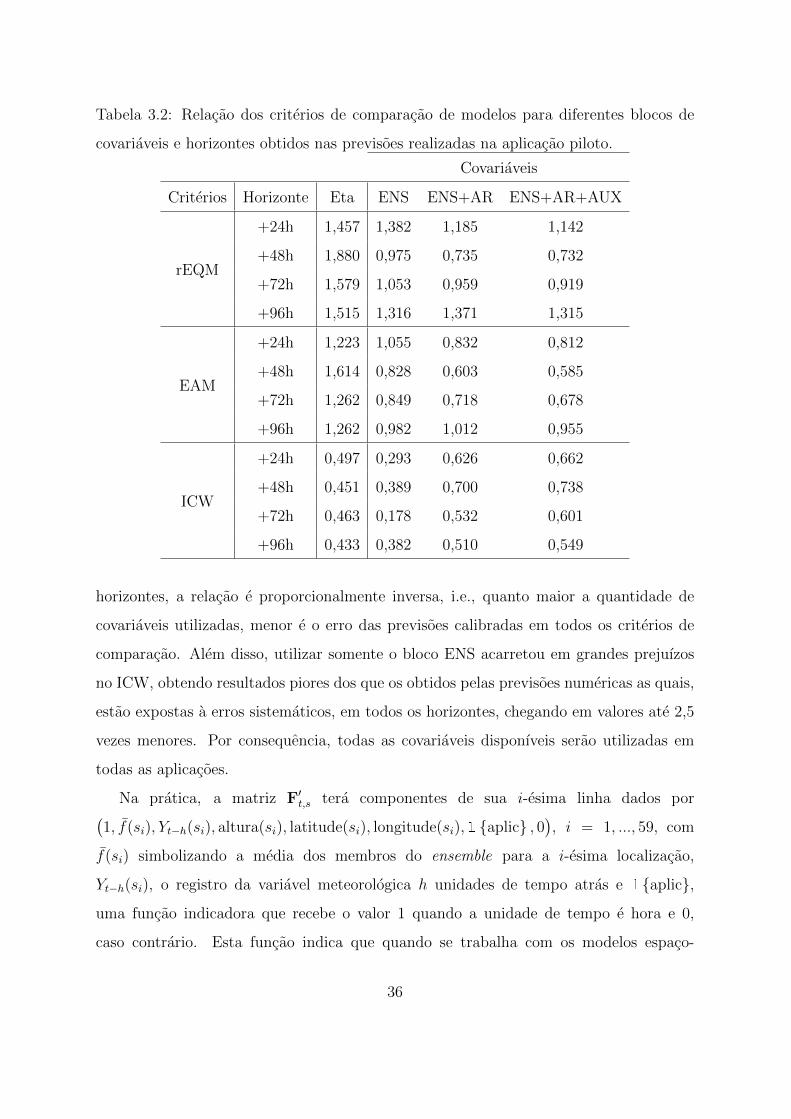
Tabela 3.2: Relacao dos criterios de comparacao de modelos para diferentes blocos de
covariaveis e horizontes obtidos nas previsoes realizadas na aplicacao piloto.
Covariaveis
Criterios Horizonte Eta ENS ENS+AR ENS+AR+AUX
rEQM
+24h 1,457 1,382 1,185 1,142
+48h 1,880 0,975 0,735 0,732
+72h 1,579 1,053 0,959 0,919
+96h 1,515 1,316 1,371 1,315
EAM
+24h 1,223 1,055 0,832 0,812
+48h 1,614 0,828 0,603 0,585
+72h 1,262 0,849 0,718 0,678
+96h 1,262 0,982 1,012 0,955
ICW
+24h 0,497 0,293 0,626 0,662
+48h 0,451 0,389 0,700 0,738
+72h 0,463 0,178 0,532 0,601
+96h 0,433 0,382 0,510 0,549
horizontes, a relacao e proporcionalmente inversa, i.e., quanto maior a quantidade de
covariaveis utilizadas, menor e o erro das previsoes calibradas em todos os criterios de
comparacao. Alem disso, utilizar somente o bloco ENS acarretou em grandes prejuızos
no ICW, obtendo resultados piores dos que os obtidos pelas previsoes numericas as quais,
estao expostas a erros sistematicos, em todos os horizontes, chegando em valores ate 2,5
vezes menores. Por consequencia, todas as covariaveis disponıveis serao utilizadas em
todas as aplicacoes.
Na pratica, a matriz F′t,s tera componentes de sua i-esima linha dados por(1, f(si), Yt−h(si), altura(si), latitude(si), longitude(si),1 {aplic} , 0
), i = 1, ..., 59, com
f(si) simbolizando a media dos membros do ensemble para a i-esima localizacao,
Yt−h(si), o registro da variavel meteorologica h unidades de tempo atras e 1 {aplic},
uma funcao indicadora que recebe o valor 1 quando a unidade de tempo e hora e 0,
caso contrario. Esta funcao indica que quando se trabalha com os modelos espaco-
36

temporais em aplicacoes que consideram a unidade de tempo como horas, pode-se
adicionar covariaveis explicativas para definir a sazonalidade. Esta, e adaptada na matriz
de evolucao do vetor de estados composta por Gt = BD(G1, G2×1 {aplic}) com G1 sendo
uma matriz diagonal de ordem 6 e G2, harmonicos, definido pela matriz:
G2 =
cos(2π/24) sen(2π/24)
−sen(2π/24) cos(2π/24)
.
Os harmonicos foram definidos com um perıodo de 24 horas representando o forcamento
solar corroborados pela Figura 1.4.
Optou-se fixar o fator de desconto requerido para a evolucao estocastica Beta-Gama
do modelo GOP dinamico (Secao 2.3.1), definido na Secao E.6 do Apendice E, δ∗ = 1, de
forma que o parametro de variancia seja constante ao longo do tempo, i.e., σ2t = σ2,∀t.
Essa decisao foi tomada em vista que, o parametro σ2t fixado no tempo, pertencente
ao modelo em questao, equivale ao parametro β0 do modelo EMOS espaco-temporal
(Secao 2.3.2). Assim, a diferenca, com relacao aos parametros, entre estes modelos
ficara por conta da relacao dispersao-proficiencia, comentada na Secao 2.1.2, representada
pelo parametro β1 > 0. De forma direta, este parametro infla a variancia quando ha
discordancia entre os membros do ensemble. Na pratica, quando β1 se aproxima de zero,
EMOS espaco-temporal e proximo ao GOP dinamico com variancia fixa.
As distribuicoes a priori atribuıdas aos parametros dos modelos, bem como a definicao
dos modelos que serao utilizados nas aplicacoes serao elucidados na secao a seguir.
3.3 Modelos Propostos
Para a calibracao da velocidade do vento a 10 metros de altura no Estado de
Minas Gerais, comparou-se o desempenho de 3 distintos modelos de pos-processamento
propostos. Em suma, sao eles:
1. Modelo EMOS espacial
Este modelo possui componente espacial, transformacao Box-Cox na variavel
resposta e censura a esquerda.
37

Apesar de homonimo, este nao e o proposto por Feldmann et al. (2015) devido
a restricao de acomodar apenas variaveis meteorologicas assumindo distribuicao
simetrica (e.g. temperatura e pressao atmosferica). Assim, o modelo EMOS
espacial proposto e uma extensao do existente, estruturado como a combinacao
da transformacao definida em (2.7) e o modelo da literatura definido na Secao
2.2.2. Este modelo e um caso particular do modelo EMOS espaco-temporal e ocorre
quando o vetor de estados e fixado ao longo do tempo, i.e., θt = θ, ∀t.
Para os parametros deste modelo, supos-se, inicialmente, independencia entre
seus parametros, i.e., p(θ,β, φ, λ) = p(θ)p(β)p(φ)p(λ) com θ ∼ N(08, I8), β ∼
NT(0,∞)(02, 10I2), φ ∼ G(
2, max(d)6
)e λ ∼ N(1, 10) onde I8 representa uma
matriz identidade de dimensao 8 e max(d), a distancia maxima observada entre
as localizacoes. Como, no contexto da calibracao, θ representa os coeficiente de
uma combinacao linear de covariaveis com a mesma escala (excluındo o bloco
AUX), proximo a uma media ponderada, espera-se que∑8
i=1 θi seja proximo a
1. Entao, a distribuicao a priori atribuıda a θ, assim como para β e λ, e
considerada nao informativa. O vetor de parametros β representa os coeficientes
(estritamente positivos) da combinacao linear da variancia amostral dos membros
do ensemble. Sendo assim, adicionou-se tal restricao na distribuicao a priori
comumente atribuıda para parametros com esta finalidade. Os hiper-parametros
para a distribuicao a priori atribuıda a φ foram selecionados de acordo com a
premissa de que a correlacao espacial e quase nula na metade da distancia maxima
entre as localizacoes observadas (Banerjee et al., 2014) e a λ, de forma que o valor
esperado seja 1, representando o efeito nulo da tranformacao Box-Cox.
2. Modelo EMOS espaco-temporal
Este modelo e o MLD Normal Multivariado com o vetor de erros observacionais
εt restrito as suposicoes indicadas em (2.13) apresentado na Secao 2.3.2. De
forma geral, o EMOS espaco-temporal possui componente espacial, temporal,
transformacao Box-Cox na variavel resposta e censura a esquerda.
38
As definicoes de entrada utilizadas, como o vetor de descontos δ, as matrizes F′t,s e
Gt, foram as mesmas utilizadas na aplicacao piloto, definidas na Secao 3.2.
Para os parametros deste modelo, supos-se, inicialmente, independencia entre seus
parametros, i.e., p(θ0,β, φ, λ) = p(θ0)p(β)p(φ)p(λ) com θ0 ∼ N(08, I8). As
distribuicoes a priori atribuıdas ao vetor parametrico (β, φ, λ)’ sao similares ao
modelo anterior. De maneira analoga ao parametro θ do modelo EMOS espacial,
a distribuicao a priori atribuıda a θ0 e tambem considerada nao informativa.
3. Modelo GOP dinamico
Este modelo e o MLD com covariancias estocasticas e aprendizado por descontos a
partir de uma evolucao estocastica Beta-Gama com o vetor de erros observacionais
εt restrito as suposicoes indicadas em (2.10) apresentado na Secao 2.3.1. De forma
geral, o GOP dinamico possui componente espacial, temporal, transformacao Box-
Cox na variavel resposta e censura a esquerda. Foi o modelo utilizado inicialmente
na aplicacao piloto. Sob certas condicoes, e tambem um caso particular do EMOS
espaco-temporal.
Para os parametros deste modelo, supos-se, inicialmente, independencia entre seus
parametros, i.e., p(θ0, σ2, φ, λ) = p(θ0)p(σ
2)p(φ)p(λ) com θ0 ∼ T1(0, I8) e ϕ =
1/σ2 ∼ G(1; 0, 1). As distribuicoes a priori atribuıdas ao vetor parametrico (φ, λ)’
sao similares aos modelos anteriores. Os hiper-parametros da distribuicao a priori
atribuıda a ϕ = 1/σ2 foram determinados de forma que haja semelhanca com os
atribuıdos ao vetor de parametros β dos modelos EMOS espacial e espaco-temporal,
o qual possui finalidade parecida com a de σ2. As distribuicoes a priori designadas
a θ0 e ϕ = 1/σ2 podem ser consideradas nao informativas conforme elucidado
previamente.
Modelos de pos-processamento estatıstico que nao possuem componente espacial,
descritos na Secao 2.1, nao foram empregados no presente trabalho pois, nao consideram
a calibracao de campos meteorologicos, corrigindo independentemente cada localizacao,
sem a possibilidade de uma interpolacao espacial corrigida e assim, nao sendo uteis para
a calibracao da velocidade do vento a 10 m no Estado de Minas Gerais. Alem disso, os
39

modelos de pos-processamento existentes na literatura que detem da componente espacial
assumem que a variavel meteorologica tem distribuicao simetrica, o que nao e o caso do
presente estudo, sendo assim, tambem nao foram aplicados em sua forma canonica.
Para medir o desempenho da calibracao feita pelos modelos propostos e compara-los
com as previsoes numericas determinısticas, empregou-se os mesmos criterios utilizados
na aplicacao piloto, descritos na Secao 3.2. A avaliacao das previsoes probabilısticas
dos modelos de pos-processamento propostos e feita tambem atraves do Interval Score
(IS, Gneiting e Raftery, 2007) o qual, leva em consideracao a amplitude e cobertura
dos intervalos de predicao, de forma parcimoniosa. Quando nao ocorre a cobertura, o
modelo e penalizado. Caso, todos os valores verdadeiros estejam contidos no intervalo
de predicao, esta medida se resume a amplitude do intervalo. Quanto menores os valores
para IS, mais eficientes sao as previsoes probabilısticas. Para mais detalhes sobre este
criterio, consulte o Apendice B.
Todos os modelos utilizados no presente trabalho foram implementados em linguagem
de programacao R1 no software estatıstico homonimo e visando a minimizacao do
tempo computacional, algumas funcoes do algoritmo MCMC foram implementadas em
linguagem C++2 utilizando a biblioteca Armadillo (Sanderson e Curtin, 2016) por meio
do pacote Rcpp (Eddelbuettel et al., 2011).
3.4 Resultados
Devido a atividade operacional que os modelos de pos-processamento exercem e a
grande quantidade de dados disponıveis, nao houve como utilizar todos de forma contınua.
Por consequencia, seguindo a logica das estacoes do ano, foram feitas 12 previsoes, 1
para cada mes, partindo de dezembro de 2015 a novembro de 2016. O horizonte de cada
aplicacao sera explicado a frente.
Projetou-se duas situacoes de aplicacoes para a calibracao da velocidade do vento a
10 metros. Sao elas:
1https://www.r-project.org/2https://isocpp.org/
40

(i) Previsao em um horario especıfico (e.g. no horario de funcionamento do modelo
Eta, 12 UTC). Assim, a unidade de tempo t sao dias.
(ii) Previsao continuamente de hora em hora. Assim, a unidade de tempo t sao horas.
Tais aplicacoes foram nomeadas por (i) “diaria” e (ii) “horaria”. Os resultados obtidos
serao apresentados, respectivamente, nas Secoes 3.4.1 e 3.4.2.
Para a obtencao de amostras da distribuicao a posteriori dos parametros dos modelos
por meio do algoritmo MCMC, monitorou-se a trajetoria de duas cadeias partindo
de valores iniciais distintos. Para minimizar problemas provindos da autocorrelacao
existente entre os valores gerados que compoem a cadeia, apos um determinado perıodo
de aquecimento (burn-in), valores sao incluıdos na amostra da distribuicao a posteriori
com certo espacamento (thinning). Esses valores variam entre os modelos e aplicacoes.
A Tabela 3.3 contem estas informacoes acerca das cadeias MCMC para todos os modelos
empregados em diferentes aplicacoes. Devido ao carater operacional do tipo de correcao
a qual, os modelos propostos foram desenvolvidos, o custo computacional e tambem
um criterio de comparacao. Como a inferencia foi feita com o auxılio de metodos
computacionais intensivos, a quantidade de parametros e de iteracoes necessarias do
algoritmo influenciam diretamente no tempo de processamento. A Tabela 3.4 reporta o
tempo medio consumido por cada modelo para diferentes tipos de aplicacoes a partir de
um desktop com configuracoes domesticas medianas.3
Com o auxılio do algoritmo Robusto Adaptativo de Metropolis (Vihola, 2012), o
tuning e feito de maneira sequencial e adaptativa, de forma que, fixa-se a taxa de aceitacao
de interesse (23,4%), resultando em taxas observadas entre 22 a 25%. Algumas destas
cadeias MCMC podem ser encontradas no Apendice F.
A atualizacao dos parametros de estado dos modelos com dinamica espaco-temporal
e feita de acordo como descrito na Secao E.2 do Apendice E. Apos a estimacao do vetor
parametrico Θ particular de cada modelo via MCMC, assume-se a existencia de amostras
Θ(i)
, i = 1, ..., Q da distribuicao a posteriori p(Θ|Y1,s, ...,YT,s) com Q representando o
3Processador: Intel(R) Core(TM) i5-4590 CPU @ 3.30GHZ; Memoria RAM: 8 GB
41

Tabela 3.3: Informacoes acerca das cadeias MCMC para os modelos propostos em
diferentes aplicacoes.
Cadeias MCMC
Modelo Aplicacao Burn-in Thinning Iteracoes Amostra
GOP dinamicoDiaria 15000 30 75000 2500
Horaria 3000 30 63000 2100
EMOS espacialDiaria 3000 30 63000 2100
Horaria 6000 30 66000 2200
EMOS espaco-temporalDiaria 15000 30 75000 2500
Horaria 50000 50 150000 3000
Tabela 3.4: Tempo medio consumido (em minutos) para aplicacao dos modelos propostos.
Aplicacoes
Modelos Diaria Horaria
GOP dinamico 34,78 72,33
EMOS espacial 34,43 103,36
EMOS espaco-temporal 42,74 169,83
42

tamanho da amostra gerada. A distribuicao preditiva p(Y1,s, ...,YT,s) e aproximada por
meio de Integracao de Monte Carlo (Robert, 2004) da seguinte maneira:
p(Y1,s, ...,YT,s) ≈Q∑i=1
p(Y1,s, ...,YT,s|Θ(i)
). (3.1)
E por fim, a distribuicao de previsao h unidade de tempo a frente p(YT+h,s|Y1,s, ...,YT,s)
dos modelos com dinamica espaco-temporal e obtida como descrito na Secao E.3 do
Apendice E. Assim, obtem-se, de cada modelo, previsoes pontuais e intervalares para a
velocidade do vento a 10 m.
3.4.1 Aplicacao: Diaria
Nesta aplicacao, considera-se o tempo em dias e o horizonte de previsao de 1 a 4 dias
a frente, simbolizado por horas como 24 a 96 horas a frente. As previsoes sao feitas para
o dia 18 a 21 de cada mes, 12 UTC. O perıodo de treinamento possui 90 dias.
Em uma visao geral do desempenho das previsoes do modelo Eta e dos modelos
propostos ao longo das estacoes do ano apresentada na Figura 3.2, por meio dos criterios
rEQM, EAM e ICW, observa-se que as previsoes numericas provenientes do modelo
Eta foram mais erraticas, no perıodo disponıvel desta aplicacao (dia 18 a 21 de cada
mes, 12 UTC), durante os meses do verao e da primavera. Isso pode se dar ao fato
de que estas estacoes do ano apresentaram extremos da velocidade do vento a 10 m,
respectivamente, como menores e maiores medias observadas. A rEQM para estas
previsoes varia, aproximadamente, no intervalo (1; 3, 5), o EAM, em (0, 9; 3) e o ICW,
em (0, 4; 0, 6).
Com objetivo de comparar o desempenho dos modelos de pos-processamento
propostos com o modelo numerico Eta, obteve-se a previsao pontual a partir da media da
distribuicao preditiva, definida em (3.1), em vista que, esta estatıstica retornou melhores
valores para os criterios utilizados. A Figura 3.3 ilustra o desempenho das previsoes dos
modelos propostos por meio dos criterios rEQM, EAM e ICW em uma melhor escala para
visualizacao, excluindo os valores dos criterios para as previsoes numericas do modelo Eta.
A rEQM para estas previsoes varia, aproximadamente, no intervalo (0, 9; 2, 5), o EAM,
em (0, 7; 2) e o ICW, em (0, 4; 0, 8). Em geral, todos os modelos propostos obtiveram
43

(a) rEQM (b) EAM (c) ICW
Figura 3.2: Criterios de comparacao de modelos na aplicacao diaria ao longo das estacoes
do ano.
(a) rEQM (b) EAM (c) ICW
Figura 3.3: Criterios de comparacao de modelos na aplicacao diaria ao longo das estacoes
do ano para os modelos propostos.
criterios de comparacao melhores que o modelo Eta, implicando que, de fato, o pos-
processamento foi relevante na qualidade das previsoes. Os resultados destacam-se mais
no verao e na primavera, respectivamente, estacoes do ano que registraram medias
mınimas e maximas da velocidade do vento a 10 m. No entanto, em determinados
momentos nos meses de abril, maio (outono) e julho (inverno), o pos-processamento
produziu resultados ligeiramente piores. E difıcil elucidar com precisao o porque destes
casos pontuais. Uma possibilidade e a ocorrencia de uma anomalia em muitos locais
de observacao, implicando em registros incomuns. Alem disto, perceba a mudanca de
nıvel da rEQM e do EAM iniciada na sucessao do inverno para a primavera durante o
mes de agosto. Possivelmente, indica uma mudanca de regime climatico a qual, pode ser
44

pretexto para o uso de covariaveis dummies para as estacoes do ano ou a introducao de
harmonicos com perıodo que represente as estacoes do ano exclusivamente nos modelos
com componente temporal. Ambos devem ser aplicados conjuntamente com um perıodo
de treinamento mais longo (� 90 dias4). Em contrapartida, perıodos de treinamentos
muito longos acarretam altos custos computacionais para estes modelos.
Sobre o desempenho das previsoes pontuais calibradas provenientes do ajuste
dos modelos propostos, pode-se afirmar que houve um empate. Nao ha diferencas
significativas no desempenho destas previsoes pontuais nesta aplicacao. Todavia, os
modelos estatısticos fornecem previsoes intervalares, no contexto da inferencia Bayesiana,
nomeados por intervalos de credibilidade (IC). Sao obtidos a partir da distribuicao
preditiva, demonstrada em (3.1). Assim, a Figura 3.4 apresenta o IS, criterio que engloba
a amplitude dos ICs95% e penaliza valores observados que nao estao contidos nestes,
elucidado na Secao 3.3, ao longo das estacoes do ano. Como nos criterios anteriores, ha
pouca divergencia. Contudo, pode-se enfatizar 2 picos: um ocorrido em abril (outono)
pelas previsoes provenientes do modelo EMOS espacial e o outro, em agosto (inverno) a
partir do ajuste do modelo GOP dinamico. As previsoes fornecidas pelo ajuste do modelo
EMOS espaco-temporal mostraram-se superficialmente mais parcimoniosas, equilibrando
o comprimento medio do IC95% com a cobertura dos valores observados. No entanto,
isto nao o caracteriza como melhor modelo.
Figura 3.4: Interval Score na aplicacao diaria ao longo das estacoes do ano.
4Duracao media das estacoes do ano.
45

Na tentativa de compreender melhor o processo estatıstico subentendido no
procedimento da calibracao das previsoes numericas da velocidade do vento a 10 m,
a Figura 3.5 ilustra um resumo da distribuicao a posteriori para o vetor de parametros
estaticos Θ = (β0, β1, φ, λ)′ ao longo das estacoes do ano. Os parametros em questao
pertencem ao modelo EMOS espaco-temporal o qual, foi selecionado pelo fato de conter
mais parametros, independente dos resultados exibidos ate entao. Observou-se que os
parametros que compoem o vetor parametrico estatico de outros modelos e sao comuns
a Θ = (β0, β1, φ, λ)′, resultaram em valores semelhantes. De fato, estes parametros
nao se alteram significativamente ao longo do tempo. Nota-se leves movimentos na
media a posteriori dos 4 parametros ao longo das estacoes. A variancia do processo,
representada pelo parametro β0, tem um leve decrescimo durante os meses do outono e
se eleva durante a sucessao do inverno para a primavera. A relacao dispersao-proficiencia
(Secao 2.1.2), representada pelo parametro β1, esta distribuıda muito proxima a zero,
indicando uma possıvel nao significancia. Para a taxa de decaimento exponencial da
correlacao espacial, representada pelo parametro φ, mantem-se praticamente constante
em 2. Este parametro caracteriza o inverso do alcance espacial. Assim, quanto menor seu
valor, mais significativa sera a correlacao espacial. E por fim, o parametro de potencia da
transformacao Box-Cox, representado pelo parametro λ, evolui em torno de 0,5, indicando
uma transformacao raiz quadrada a qual, e bastante usual em variaveis com distribuicao
com assimetria positiva.
Com o objetivo de investigar minuciosamente o comportamento local das previsoes
numericas e calibradas a partir do ajuste dos modelos propostos, selecionou-se os meses de
janeiro (verao) e outubro (primavera), devido a boa performance dos modelos propostos,
para a exibicao das series observadas e previsoes numericas, calibradas pontuais e
intervalares. De 18 a 21 de janeiro de 2016, 12 UTC, registraram-se velocidades do
vento a 10 m de ate 8 m/s. No entanto, conforme exibido na Figura 3.6, perceba
que velocidades acima de 5 m/s sao pontuais. Em geral, grande parte das velocidades
registradas acomodam-se ate 5 m/s nesta aplicacao. Note que o diagrama de dispersao
dos modelos propostos sao praticamente identicos e demonstram a boa habilidade dos
modelos para calibrar as previsoes numericas. O melhor ajuste se da pelo modelo que
46

(a) β0 (b) β1
(c) φ (d) λ
Figura 3.5: Media a posteriori e intervalos de credibilidade de 95% para o vetor
parametrico estatico do modelo EMOS espaco-temporal na aplicacao diaria ao longo
das estacoes do ano.
apresenta um diagrama de dispersao que retorna uma relacao mais proxima de linear entre
valores observados e previstos. Casos isolados de velocidade acima de 6 m/s podem nao
ser previstos devido a um possıvel comportamento atıpico (e.g. passagem de um frente
fria). Pelo diagrama de dispersao, constata-se que as previsoes numericas do modelo Eta
apresentam uma grande sobrestimacao da realidade.
O comportamento local das previsoes em questao e exibido na Figura 3.7.
Arbitrariamente, selecionou-se as estacoes de monitoramento A533 – Ganhaes, A535
– Florestal, A557 – Coronel Pacheco e A561 – Sao Sebastiao do Paraıso. Note que
a velocidade do vento a 10 m as 12 UTC evoluiu suavemente ao longo dos dias nos
locais citados. Diferentemente das previsoes calibradas pontuais, as previsoes numericas
evoluem no tempo, em certos momentos, de forma brusca. Esta distincao indica uma
maior relevancia de outras covariaveis, como a do bloco AR. De forma informativa, com
diferencas sutis, a menor amplitude do IC95% para as previsoes da velocidade do vento a
47

(a) Eta (b) EMOS E (c) EMOS ET (d) GOP D
Figura 3.6: Diagrama de dispersao com valores previstos versus observados na aplicacao
diaria para 18 a 21 de janeiro de 2016, 12 UTC.
10 m e dada pelo modelo GOP dinamico e a maior, pelo modelo EMOS espaco-temporal.
Esta informacao ja fora contemplada de maneira eficiente no criterio IS, exibido na Figura
3.4.
(a) A533 – EMOS E (b) A535 – EMOS E (c) A557 – EMOS E (d) A561 – EMOS E
(e) A533 – EMOS ET (f) A535 – EMOS ET (g) A557 – EMOS ET (h) A561 – EMOS ET
(i) A533 – GOP D (j) A535 – GOP D (k) A557 – GOP D (l) A561 – GOP D
Figura 3.7: Previsao 1 a 4 dias a frente para a velocidade do vento a 10 m de altura em
janeiro de 2016, 12 UTC.
48

De 18 a 21 de outubro de 2016, 12 UTC, registraram-se velocidades do vento a 10
m de ate 6 m/s. Repare que a estacao do ano corrente e a primavera, a qual retorna
maiores medias de velocidade do vento. No entanto, nestes dias de previsao nao registrou-
se velocidades acima de 6 m/s. Em contraponto, o cenario apresentado na Figura 3.6
durante o verao o qual, apresenta menores medias de velocidade do vento em geral,
observou-se velocidade ate 8 m/s. Apesar de haver a influencia das estacoes do ano,
a velocidade do vento a 10 m mostra-se volatil. De forma semelhante ao apresentado
anteriormente, as previsoes numericas tambem sobrestimam a velocidade do vento neste
mes. Em vista da nao ocorrencia de velocidades que fogem do padrao, os modelos
apresentaram resultados satisfatorios neste mes.
(a) Eta (b) EMOS E (c) EMOS ET (d) GOP D
Figura 3.8: Diagrama de dispersao com valores previstos versus observados na aplicacao
diaria para 18 a 21 de outubro de 2016, 12 UTC.
O comportamento local das previsoes em questao e exibido na Figura 3.9 nas
mesmas estacoes de monitoramento selecionadas previamente nesta aplicacao. De forma
semelhante, a velocidade do vento a 10 m as 12 UTC evoluiu suavemente ao longo dos dias
nos locais citados. Note que, para este mes, as previsoes numericas evoluıram de maneira
mais suave com seus erros dados, aproximadamente, por um incremento constante para
cada localizacao.
Nesta aplicacao, os modelos demonstraram razoavel habilidade para a calibracao das
previsoes numericas, como demonstrado pelos criterios exibidos na Figura 3.2. Houve
certa dificuldade na previsao de velocidades mais altas (acima de 6 m/s). No entanto,
este pode ser um caso atıpico. A componente sazonal dos modelos de calibracao espaco-
49
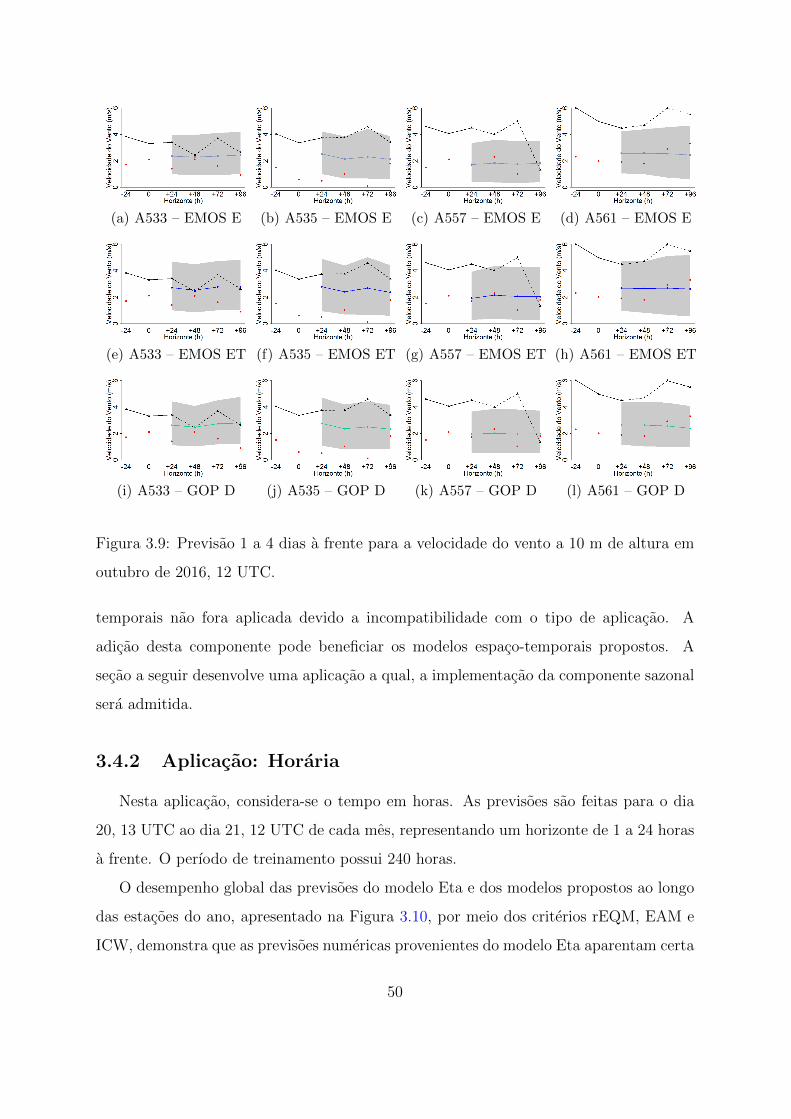
(a) A533 – EMOS E (b) A535 – EMOS E (c) A557 – EMOS E (d) A561 – EMOS E
(e) A533 – EMOS ET (f) A535 – EMOS ET (g) A557 – EMOS ET (h) A561 – EMOS ET
(i) A533 – GOP D (j) A535 – GOP D (k) A557 – GOP D (l) A561 – GOP D
Figura 3.9: Previsao 1 a 4 dias a frente para a velocidade do vento a 10 m de altura em
outubro de 2016, 12 UTC.
temporais nao fora aplicada devido a incompatibilidade com o tipo de aplicacao. A
adicao desta componente pode beneficiar os modelos espaco-temporais propostos. A
secao a seguir desenvolve uma aplicacao a qual, a implementacao da componente sazonal
sera admitida.
3.4.2 Aplicacao: Horaria
Nesta aplicacao, considera-se o tempo em horas. As previsoes sao feitas para o dia
20, 13 UTC ao dia 21, 12 UTC de cada mes, representando um horizonte de 1 a 24 horas
a frente. O perıodo de treinamento possui 240 horas.
O desempenho global das previsoes do modelo Eta e dos modelos propostos ao longo
das estacoes do ano, apresentado na Figura 3.10, por meio dos criterios rEQM, EAM e
ICW, demonstra que as previsoes numericas provenientes do modelo Eta aparentam certa
50

periodicidade em seus erros, corroborando com a premissa de que estas previsoes possuem
erros sistematicos caracterısticos. A rEQM para estas previsoes varia, aproximadamente,
no intervalo (1, 2; 3, 8), o EAM, em (0, 8; 3, 4) e o ICW, em (0, 2; 0, 7).
(a) rEQM (b) EAM (c) ICW
Figura 3.10: Criterios de comparacao de modelos na aplicacao horaria ao longo das
estacoes do ano.
Com objetivo de comparar o desempenho dos modelos de pos-processamento
propostos com o modelo numerico Eta, obteve-se a previsao pontual a partir da mediana
da distribuicao preditiva, definida em (3.1), em vista que, esta estatıstica retornou
melhores valores para os criterios utilizados. A Figura 3.11 ilustra o desempenho das
previsoes dos modelos propostos por meio dos criterios rEQM, EAM e ICW em uma
melhor escala para visualizacao, excluindo os valores dos criterios para as previsoes
numericas do modelo Eta. A rEQM para estas previsoes varia, aproximadamente, no
intervalo (0, 5; 2), o EAM, em (0, 4; 1, 7) e o ICW, em (0, 4; 0, 9). Em geral, todos
os modelos propostos obtiveram criterios de comparacao melhores que o modelo Eta,
implicando que, de fato, o pos-processamento aprimorou as previsoes. Atente ao fato de
que, todos os modelos propostos conseguem suavizar a notoria periodicidade dos erros.
Os resultados sao moderadamente prejudicados durante a primavera, estacao a qual, os
erros (rEQM e EAM) maximos observados sao maiores. Apenas em um momento no
mes de maio (outono), o pos-processamento realizado pelos modelos espacos-temporais
produziu resultados vagamente piores. Ja o modelo EMOS espacial resultou em um erro
relativamente maior, destoando de forma excessiva dos modelos mais robustos. Como
e um caso particular, possivelmente, uma anormalidade meteorologica ocorreu. Assim
51

como na aplicacao da Secao 3.4.1, observou-se uma mudanca de regime durante a sucessao
do inverno para a primavera.
(a) rEQM (b) EAM (c) ICW
Figura 3.11: Criterios de comparacao de modelos na aplicacao horaria ao longo das
estacoes do ano para os modelos propostos.
Sobre o desempenho das previsoes pontuais calibradas provenientes do ajuste dos
modelos propostos, percebe-se que os modelos espaco-temporais apresentam resultados
de rEQM, EAM e ICW suavemente melhores. Ja para as previsoes intervalares, a Figura
3.12 apresenta o IS ao longo das estacoes do ano. Note-que neste criterio, potenciais
disparidades foram realcadas. O modelo proposto EMOS espacial possui uma longa
sequencia de picos, enquanto os modelos propostos espaco-temporais permanecem mais
estaveis. Sendo assim, salienta-se que as previsoes fornecidas pelos ajustes dos modelos
espaco-temporais foram mais parcimoniosas.
De forma analoga a que fora apresentado na Figura 3.5, um resumo da distribuicao
a posteriori do vetor de parametros estaticos do modelo EMOS espaco-temporal
Θ = (β0, β1, φ, λ)′ ao longo das estacoes do ano e apresentado na Figura 3.13.
Comparando com o obtido na aplicacao da Secao 3.4.1, apesar da transicao estar
desajeitada, o parametro β0, representando a variancia do processo, permanece tendo
um leve decrescimo durante os meses do outono e se eleva durante a sucessao do
inverno para a primavera. O parametro λ, representando a potencia da transformacao
BC, evolui tambem em torno de 0,5, indicando, igualmente, uma transformacao raiz
quadrada. O parametro β1, representando a relacao dispersao-proficiencia (Secao
2.1.2), esta distribuıdo muito proximo a zero, sendo, igualmente nesta aplicacao, pouco
52

Figura 3.12: Interval Score na aplicacao horaria ao longo das estacoes do ano.
representativo. O parametro φ e o unico que destoa completamente da aplicacao feita
anteriormente. Atente ao fato de que com a introducao dos campos meteorologicos
de forma horaria, muitos instantes com velocidades do vento reduzidas por todo o
territorio (e.g. durante a madrugada) podem ser adicionados ao perıodo de treinamento,
principalmente durante as estacoes do ano de ventos mais fracos como o outono e parte do
inverno. Assim, a velocidade do vento e aproximadamente uniforme por todo o territorio,
implicando na baixa representatividade da correlacao espacial. Em contrapartida, repare
que o cenario muda durante a primavera, estacao do ano a qual, observou-se maiores
medias de velocidade do vento a 10 m.
Com o proposito de apurar o comportamento local das previsoes numericas e
calibradas a partir do ajuste dos modelos propostos, selecionou-se os meses de julho
e agosto (inverno) conforme o bom desempenho demonstrado nestes meses. Apesar de
pertenceram a mesma estacao do ano, o erro (rEQM e EAM) de agosto se assimila mais ao
padrao da estacao seguinte, aparentando ser um perıodo de mudanca de regime climatico.
De 20 de julho, 13 UTC a 21 de julho de 2016, 12 UTC, registraram-se velocidades do
vento a 10 m de ate 8 m/s, como apresentado na Figura 3.14. Na presente aplicacao,
velocidades mais altas (> 5 m/s) aparecem com mais frequencia. Porem, grande parte
das velocidades registradas ainda acomodam-se ate 5 m/s. Repare que o diagrama de
dispersao dos modelos propostos retornam uma relacao bem proxima de linear entre
valores observados e previstos. Inclusive, para velocidades acima de 5 m/s. Contudo,
53

(a) β0 (b) β1
(c) φ (d) λ
Figura 3.13: Mediana a posteriori e intervalos de credibilidade de 95% para o vetor
parametrico estatico do modelo EMOS espaco-temporal na aplicacao horaria ao longo
das estacoes do ano.
o diagrama de dispersao do modelo EMOS espacial evidencia uma sobrestimacao da
velocidade do vento a 10 m. Em contraste, o diagrama de dispersao das previsoes do
modelo Eta demonstra baixa representatividade.
(a) Eta (b) EMOS E (c) EMOS ET (d) GOP D
Figura 3.14: Diagrama de dispersao com valores previstos versus observados na aplicacao
horaria de 20 de julho de 2016, 13 UTC a 21 de julho de 2016, 12 UTC.
54

O comportamento local das previsoes em questao sao exibidos na Figura 3.15.
Arbitrariamente, selecionou-se as estacoes de monitoramento A512 – Ituiutaba, A549
– Aguas Vermelhas, A555 – Ibirite (Rola Moca) e F501 – Belo Horizonte (Cercadinho).
Atente ao fato de que as estacoes A555 e F501 distanciam-se 8 km e sao as estacoes com
maior proximidade. Assim, estao localizadas dentro da mesma celula da grade discreta
do modelo Eta e portanto, possuem igual previsao (numerica). Entretanto, perceba a
diferenca no nıvel das previsoes calibradas. Isto corrobora com o fato de que aspectos
locais em microescala, i.e., caracterısticas do local da estacao e seu entorno em um curto
raio, influenciam diretamente na velocidade do vento a 10 m. Semelhante ao que ocorre
na aplicacao da Secao 3.4.1, ha uma grande distincao entre as trajetorias das previsoes
numericas e calibradas, prenunciando uma maior relevancia de outras covariaveis. A
maior amplitude do IC95% para as previsoes da velocidade do vento a 10 m e dada
pelo modelo EMOS espacial. Esta larga amplitude pode ter sido consequencia do uso
de um longo perıodo de treinamento o qual, pode introduzir distorcoes na estimacao dos
parametros devido a sazonalidade provinda do efeito do forcamento solar na velocidade
do vento a 10 m. Em contrapartida, os modelos espaco-temporais proposto se beneficiam
desta particularidade, absorvendo este efeito, sem custo extra.
De 20 de agosto, 13 UTC a 21 de agosto de 2016, 12 UTC, registraram-se velocidades
do vento a 10 m de ate 9 m/s, como apresentado na Figura 3.16. Velocidades acima de 6
m/s nao foram previstas. Note que as previsoes numericas apresentaram sobrestimacao
excessiva. Como ocorrido no cenario anterior, o diagrama de dispersao do modelo EMOS
espacial evidencia uma sobrestimacao da velocidade do vento a 10 m.
O comportamento local das previsoes em questao sao exibidos na Figura 3.17 nas
mesmas estacoes de monitoramento selecionadas previamente nesta aplicacao. Repare
como os intervalos de predicao de todos os modelos sao bem mais extensos dos que foram
ajustados no mes anterior. Enfase nos intervalos provenientes do ajuste do modelo EMOS
espacial os quais, mostram-se pouco informativos devido a sua vasta amplitude. Note o
ocorrido durante a madrugada do dia 21 de outubro de 2016 na estacao de monitoramento
A512. A velocidade do vento a 10 m permaneceu 8 horas seguidas sendo registrada
abaixo de 1 m/s e repentinamente, a velocidade se eleva em ate 6 m/s. Perceba que a
55

(a) A512 – EMOS E (b) A549 – EMOS E (c) A555 – EMOS E (d) F501 – EMOS E
(e) A512 – EMOS ET (f) A549 – EMOS ET (g) A555 – EMOS ET (h) F501 – EMOS ET
(i) A512 – GOP D (j) A549 – GOP D (k) A555 – GOP D (l) F501 – GOP D
Figura 3.15: Previsao ate 24 horas a frente para a velocidade do vento a 10 m de altura
de 20 de julho de 2016, 13 UTC a 21 de julho de 2016, 12 UTC.
(a) Eta (b) EMOS E (c) EMOS ET (d) GOP D
Figura 3.16: Diagrama de dispersao com valores previstos versus observados na aplicacao
horaria de 20 de agosto de 2016, 13 UTC a 21 de agosto de 2016, 12 UTC.
previsao do modelo numerico Eta consegue, embora tardiamente, captar esta mudanca
abrupta. Infortunadamente, devido ao historico de erros, tais previsoes tem pouco peso
56

nos modelos de calibracao propostos e nao faz com que a previsao calibrada realize este
movimento inesperado.
(a) A512 – EMOS E (b) A549 – EMOS E (c) A555 – EMOS E (d) F501 – EMOS E
(e) A512 – EMOS ET (f) A549 – EMOS ET (g) A555 – EMOS ET (h) F501 – EMOS ET
(i) A512 – GOP D (j) A549 – GOP D (k) A555 – GOP D (l) F501 – GOP D
Figura 3.17: Previsao ate 24 horas a frente para a velocidade do vento a 10 m de altura
de 20 de agosto de 2016, 13 UTC a 21 de agosto de 2016, 12 UTC.
O modelo GOP dinamico e um dos modelos espaco-temporais propostos. Os
resultados obtidos por este modelo foram muito proximos aos obtidos pelo outro modelo
espaco-temporal proposto, EMOS espaco-temporal, o qual, apresentou os melhores
criterios na presente aplicacao. A principal vantagem do modelo GOP dinamico e
possuir menos parametros que necessitam de metodos computacionais intensivos para
serem estimados, requerendo menos iteracoes do algoritmo MCMC durante o processo
de inferencia para alcancar a convergencia, como apresentado na Tabela 3.3. A Tabela
3.4 demonstra que, dependendo do tipo de aplicacao, o modelo GOP dinamico pode
chegar a ser mais de 2 vezes mais rapido quando comparado ao EMOS espaco-temporal.
57

Por consequencia, foi o escolhido para demonstrar a calibracao da velocidade do vento a
10 m para todo o Estado de Minas Gerais.
3.4.3 Aplicacao: Interpolacao Espacial
A interpolacao espacial (Krigagem, Cressie, 1993) e feita a partir da distribuicao
preditiva do Processo Gaussiano latente Xt,s que fora adaptado aos modelos propostos
atraves da estruturacao dada em (2.8). Esta estruturacao permite lidar com variaveis
com distribuicao assimetrica com domınio positivo conjuntamente com a utilidade da
interpolacao espacial de forma simples e direta, no contexto da inferencia Bayesiana.
Seguindo o que foi apresentado em (3.1), para a predicao da velocidade do vento a 10
m em um novo conjunto de localizacoes Yt,s′ = (y(s′1), ..., y(s′n′))′, faz-se necessario a
distribuicao preditiva dada por:
p(Xt,s′ |Xt,s) =
∫p(Xt,s′|Xt,s, Θ)p(Θ|Xt,s′)dΘ,
sendo aproximada, utilizando Integracao de Monte Carlo, da seguinte maneira:
p(Xt,s′|Xt,s) ≈Q∑i=1
p(Xt,s′|Xt,s, Θ(i)
),
de forma que, sob um PG, tem-se:Xt,s′
Xt,s
|Θ ∼ N
µsµs′
,
Σs Σs,s′
Σ′s,s′ Σs′
.
Conforme as propriedades da distribuicao Normal, chega-se a:
Xt,s′|Xt,s, Θ ∼ N(µs′ + Σ′s,s′Σ−1s (Xt,s − µs),Σs′ − Σ′s,s′Σ
−1s Σs,s′).
Por fim, a velocidade do vento a 10 m em um novo conjunto de localizacoes Yt,s′ =
(y(s′1), ..., y(s′n′))′ e obtida atraves da relacao em (2.7) e a distribuicao de previsao h
unidade de tempo a frente p(YT+h,s|Y1,s, ...,YT,s) do modelo espaco-temporal selecionado
e obtida como descrito na Secao E.3 do Apendice E. Assim, obtem-se, previsoes pontuais
e intervalares para a velocidade do vento a 10 m para todo o Estado de Minas Gerais.
58

Uma limitacao especıfica da presente aplicacao e o uso do bloco AR. Para a
interpolacao espacial, isto se torna um fator ainda mais adverso pois, nao ha medicoes
disponıveis para o novo conjunto de localizacoes s′1, ..., s′n′ . Assim, apesar da possıvel
inclusao de erros, a inputacao destes dados atraves de uma interpolacao bilinear, como
feito com as previsoes numericas regularmente espacadas (consulte a Figura 1.2), e a
opcao mais eficiente do ponto de vista operacional. Espera-se que as previsoes numericas
calibradas serao mais representativas em regioes localizadas proximas as estacoes de
monitoramento meteorologico.
Em busca de garantias de que os resultados obtidos a partir da interpolacao espacial
sao coesos, aplicou-se uma validacao cruzada. Assim, retirou-se 4 estacoes do banco de
dados utilizado. Foram elas: A505 – Araxa, A517 – Muriae, A550 – Itaobim e A560
– Pompeu. Tomou-se a cautela de selecionar estacoes de monitoramento que nao sao,
relativamente, isoladas. Portanto, utilizou-se o modelo GOP dinamico para calibrar a
previsao numerica da velocidade do vento a 10 m para todo o Estado de Minas Gerais
para julho de 2016 utilizando 55 das 59 estacoes de monitoramento. A Figura 3.18 exibe
as previsoes numericas brutas, pontuais e intervalares calibradas para as estacoes de
monitoramento removidas da amostra.
(a) A505 – GOP D (b) A517 – GOP D (c) A550 – GOP D (d) A560 – GOP D
Figura 3.18: Previsao ate 24 horas a frente para a velocidade do vento a 10 m de altura
de 20 de julho de 2016, 13 UTC a 21 de julho de 2016, 12 UTC obtidos a partir da
interpolacao espacial. Estacoes de monitoramento A505, A517, A550 e A560 fora da
amostra.
Note que o ajuste feito na interpolacao espacial tem semelhanca em ordem de que
as previsoes calibradas tem trajeto completamente distinto das previsoes numericas
brutas, implicando, novamente, que a previsao numerica tem peso pequeno dentre as
59

covariaveis. Visualmente, as previsoes intervalares permanecem parcimoniosas. Nao sao
demasiadamente amplas, resultando pouca incerteza em tomadas de decisao, ao mesmo
tempo que, estritamente para estas previsoes nestas estacoes, obtiveram uma proporcao
de mais de 80% de cobertura.
Os mapas com as previsoes calibradas pelo modelo GOP dinamico juntamente com
as previsoes do modelo numerico Eta para 6, 12, 18 e 24 horas a frente no Estado de
Minas Gerais sao apresentados na Figura 3.19. Superficialmente, pode-se comentar sobre
alguns padroes regionais observados. Previu-se velocidades levemente superiores ao longo
do tempo na [1] porcao leste da mesorregiao do Triangulo Mineiro e Alto Paranaıba, [2] no
municıpio de Belo Horizonte e em uma [3] area de terreno acidentado que vai do centro ao
extremo norte do Estado. Em contraponto, observou-se previsoes de velocidade levemente
inferiores na [4] regiao mais ao sul do Estado e na [5] regiao que fica as margens do Rio
Paraıba do Sul em torno de Alem Paraıba. Estas regioes estao sinalizadas na Figura 3.20.
Os mapas produzidos pelo ajuste dos modelos de calibracao podem auxiliar em muitas
aplicacoes distintas, como as citadas em 1.2.2.
3.5 Conclusoes
Para calibrar as previsoes da velocidade do vento a 10 m providas pelo modelo
numerico Eta, propos-se 3 modelos de pos-processamentos estatıstico: EMOS espacial,
EMOS espaco-temporal e GOP dinamico.
Inicialmente, decidiu-se que seria necessario o uso de todas as covariaveis disponıveis,
em vista que, apenas os membros do ensemble nao explicavam razoavelmente o fenomeno.
O restante das covariaveis disponıveis sao compostas pelos valores observados passados
(bloco AR) e pela latitude, longitude e altura do relevo dos locais das estacoes de
monitoramento meteorologico (bloco AUX). Em geral, modelos de calibracao corrigem
variaveis meteorologicas em um horizonte de previsao distante. No entanto, utilizar
valores observados passados restringiu demasiadamente o horizonte maximo de previsao
e assim, as aplicacoes foram restritas a horizontes curtos.
60

20/07/2016, 18 UTC – PN 20/07/2016, 18 UTC – PP 20/07/2016, 18 UTC – ME
21/07/2016, 00 UTC – PN 21/07/2016, 00 UTC – PP 21/07/2016, 00 UTC – ME
21/07/2016, 06 UTC – PN 21/07/2016, 06 UTC – PP 21/07/2016, 06 UTC – ME
21/07/2016, 12 UTC – PN 21/07/2016, 12 UTC – PP 21/07/2016, 12 UTC – ME
Figura 3.19: Previsoes 6, 12, 18 e 24 horas a frente para a velocidade do vento a 10 m
de altura para o Estado de Minas Gerais. PN: Previsao numerica proveniente do modelo
Eta. PP: Previsao pontual calibrada proveniente do ajuste do modelo GOP dinamico.
ME: Margem de erro, definida como metade do comprimento do intervalo de credibilidade
95% da previsao probabilıstica.
61

Figura 3.20: Mapa contendo a localizacao das regioes enumeradas.
Projetou-se dois distintos modos de aplicacao para avaliar a capacidade de refino
que os modelos propostos possuem. Um deles, considerou a calibracao em um horario
especıfico (12 UTC) e foi nomeado por aplicacao “diaria” e o outro, concentrou-se em
calibrar sequencialmente ao longos das horas, nomeado por aplicacao “horaria”.
Na aplicacao “diaria”, os modelos propostos conseguiram refinar as previsoes
numericas de modo que os criterios de erro (rEQM e EAM), reduzissem. Os resultados
mais significativos com relacao ao EAM, por exemplo, ocorreram nos meses de janeiro
(verao), reduzindo de 2,2 para 0,75 (reducao de 66%), e outubro (primavera), de 2,6
para 1,2 (reducao de 53%) a partir do ajuste do modelo GOP dinamico. As previsoes
pontuais e intervalares foram muito semelhantes entre os modelos propostos. Nenhum
dos modelos se sobressaiu. Foi visto que, em geral, os modelos propostos conseguem
diminuir medidas de erro. Contudo, de forma especıfica, tiveram dificuldades em prever
velocidade do vento ligeiramente mais altas (> 5 m/s). Isto pode ser justificado devido a
haver poucos registros nesta faixa de velocidade. Assim, ate 5 m/s, os modelos propostos
tiveram desempenho razoavel.
Na aplicacao “horaria”, observou-se que o rEQM e o EAM das previsoes do modelo
numerico Eta possuem certa periodicidade. Mesmo assim, os modelos propostos
obtiveram resultados significativamente melhores do que o modelo Eta e conseguiram
suavizar este efeito periodico. Pode-se citar como resultados relevantes a diminuicao do
EAM em janeiro (verao), de 3,4 para 0,75 (reducao de 78%), e em agosto (inverno) de 3,4
62

para 0,8 (reducao de 76%) a partir do ajuste do modelo GOP dinamico. Comparando
o desempenho das previsoes probabilısticas entre os modelos propostos a partir do IS,
os modelos espaco-temporais tem vantagem. Isto pode se dar ao fato de que o modelo
espacial nao e habil para lidar com os efeitos sazonais que este tipo de variavel contem
implıcito, mencionados na Secao 1.2.5 e ilustrados na Figura 1.4. Outro ponto importante
e o fato de que o aumento do comprimento do perıodo de treinamento nao prejudica
a estimacao dos parametros. Esta e uma discussao recorrente na literatura de pos-
processamento estatıstico (consulte Raftery et al. (2005); Gneiting et al. (2005) e Gneiting
(2014)). Alem disto, estes modelos conseguem lidar com efeitos sazonais de maneira
intuitiva, sem custos adicionais. Nesta aplicacao, nenhum dos modelos propostos teve
dificuldade para prever velocidades mais altas (> 5 m/s).
Por fim, comparou-se o custo computacional de aplicacao dos modelos. O
modelo EMOS espaco-temporal, apesar de bons criterios, e demasiadamente custoso
computacionalmente para este tipo de aplicacao. Isto ocorre devido a grande quantidade
de parametros que necessitam de metodos computacionais intensivos para serem
estimados, requerendo uma maior quantidade de iteracoes do algoritmo MCMC, como
apresentado na Tabela 3.3. Alem disto, como apontado pelas Figuras 3.5 e 3.13, a
distribuicao a posteriori de β1, parametro que representa a relacao dispersao-proficiencia
(Secao 2.1.2) e e exclusivo da classe de modelos EMOS em geral, esta distribuıda muito
proxima a zero, implicando em uma nao significancia. Uma possıvel justifica a essa
irrelevancia pode ser dar dada pelo fato de que os membros do ensemble de previsoes
numericas do modelo Eta mostram-se estaveis, oscilando pouco, como apresentado
na Figura 3.1, e consequentemente, retornam uma variancia amostral reduzida. Em
contraponto, o modelo GOP dinamico chega a ser 2 vezes mais computacionalmente
eficiente. Estruturado sob um MLD com covariancias estocasticas e aprendizado por
descontos a partir de uma evolucao estocastica Beta-Gama, este modelo proposto
conseguiu combinar qualidade de previsoes, conforme os criterios rEQM, EAM, ICW e
IS, com um tempo computacional viavel para o tipo de aplicacao operacional o qual, fora
idealizado. Alem disso, a possibilidade da variacao do parametro de variancia ao longo do
tempo σ2t e uma faceta exclusiva deste modelo, embora nao testada na presente aplicacao
63

por questoes de comparabilidade entre modelos, elucidadas na Secao 3.2, pode auxiliar
em um melhor desempenho sem acarretar prejuızos no tempo de processamento devido
a sua estimacao ser feita de forma sequencial. Assim, conclui-se que dentre os modelos
propostos, o modelo GOP dinamico e o mais aconselhavel para o pos-processamento
estatıstico operacional das previsoes do modelo numerico Eta para a velocidade do vento
a 10 m.
64

Capıtulo 4
Consideracoes Finais e Trabalhos
Futuros
O presente estudo teve a finalidade de calibrar previsoes numericas fornecidas pelo
modelo de mesoescala Eta para a velocidade do vento a 10 metros de altura em Minas
Gerais. Devido a escala em que o modelo Eta trabalha, suas previsoes podem apresentar
erros sistematicos quando deseja-se prever em locais especıficos, como apontado pela
Figura 1.3. Assim, propos-se modelos estatısticos que facam o pos-processamento para
campos meteorologicos completos. Como inovacao, adicionou-se a dinamica temporal
aos modelos de pos-processamento, em vista que, muitos fenomenos meteorologicos
evoluem ao longo do tempo com certa sazonalidade devido ao forcamento solar e/ou
estacoes do ano. Alem disso, utilizou-se a tecnica de aumento de dados (Tanner e Wong,
1987), para definir Processos Gaussianos latentes capazes de acomodar a “censura”
da variavel meteorologica de estudo. Desta forma, contornou-se a limitacao do uso
exclusivo de variaveis meteorologicas com distribuicao simetrica e com domınio em R nos
modelos de calibracao espacial, comentados na Secao 2.2. A insercao deste procedimento,
determinado por (2.7) e (2.8), na literatura do pos-processamento estatıstico trara o
advento de novas aplicacoes deste tipo (e.g. calibracao espacial da velocidade do vento e
precipitacao).
Os modelos de pos-processamento propostos, nomeados por, GOP dinamico (Secao
2.3.1) e EMOS espaco-temporal (Secao 2.3.2) foram estruturados atraves dos Modelos
65

Lineares Dinamicos Bayesianos (MLD, West e Harrison, 1997). Ambos tem como
base o modelo MOS (Secao 2.1.1; Glahn e Lowry, 1972) o qual, foi primordial para
o desenvolvimento das sucessoras versoes. Outros metodos de pos-processamento usuais
nao foram utilizados no presente trabalho devido a questoes tecnicas e praticas especıficas
como, por exemplo, o modelo MOC (Mao et al., 1999), o qual supoe que os erros
sistematicos sao Normalmente distribuıdos, quando, na pratica, nao sao, principalmente
em variaveis com distribuicao assimetrica, como discute Lange (2005), e, ocasionalmente,
este modelo pode resultar valores negativos para a previsao da velocidade do vento,
sendo necessario a anexacao de um truncamento determinıstico nas previsoes. O
modelo Bayesian Model Average (BMA, Raftery et al., 2005), detalhado no Apendice A,
juntamente com sua extensao temporal Dynamic Model Average (DMA, Raftery et al.,
2010) nao foram utilizados porem, sao de interesse para investigacoes futuras. Embora o
DMA nao tenha sido aplicado no contexto do pos-processamento estatıstico de previsoes
numericas de variaveis meteorologicas, e um modelo de mesma natureza dos que foram
propostos neste trabalho. No entanto, encaixar as devidas adaptacoes para variaveis
assimetricas seria computacionalmente custoso para a estimacao dos parametros desta
classe de modelos. Alem disso, o BMA e seus derivados sao indicados para quando
se possui um superensemble, i.e., um ensemble composto por ensembles de distintos
modelos numericos, em vista que, os membros de um mesmo ensemble podem ser
altamente correlacionados, diferindo pouco entre si, como ocorreu na aplicacao especıfica
deste trabalho, elucidado na Figura 3.1. Ainda sobre os modelos propostos, foram
desenvolvidos com o princıpio de genericidade, aplicavel em diferentes tipos de variaveis
numericas contınuas positivas ou com domınio definido em R. As excecoes sao fenomenos
meteorologicos que sao medidos em graus (e.g. direcao do vento) e que estao definidos
em um intervalo fechado (e.g. umidade relativa do ar), requerendo transformacoes
especıficas. Ademais, contemplam covariaveis auxiliares e permitem a calibracao para
locais especıficos ou para todo o campo meteorologico de estudo.
Com respeito aos resultados obtidos, os modelos espaco-temporais propostos
apresentaram vantagem na aplicacao que dispunha de um efeito sazonal definido, com
os resultados exibidos na Secao 3.4.2, em comparacao com o modelo espacial proposto.
66

Quando este efeito nao esta presente, como na aplicacao apresentada na Secao 3.4.1,
nao ha diferencas significativas de resultados entre os modelos mais robustos com o
que possui somente a componente espacial. Indicando que, de fato, os modelos espaco-
temporais beneficiaram-se da sazonalidade intrınseca da variavel de estudo. Os modelos
propostos mostraram-se habeis na aplicacao que considera o tempo em horas com relacao
ao fornecimento de previsoes de velocidades mais altas (> 5 m/s) em vista que, ocorrem
com pouca frequencia.
Um grande limitador de desempenho dos modelos de pos-processamento propostos
foi a ausencia de informacoes locais mais detalhadas (e.g. relevo, orografia e rugosidade),
fazendo com que fosse necessario o uso de uma componente autorregressiva, limitando
largamente o horizonte de previsao. Em geral, os modelos de calibracao trabalham
em previsoes de longo prazo diferentemente de como fora empregado neste trabalho
devido as restricoes de desempenho demonstradas na Tabela 3.2. A velocidade do vento
a 10 metros de altura do solo mostrou-se demasiadamente instavel, sendo fortemente
influenciada por aspectos de microescala (e.g. proximidade com corpos d’agua e com
areas urbanas; Warner, 2010) os quais, se levados em consideracao, presumivelmente,
beneficiarao a qualidade da calibracao. Em vista que o Estado de Minas Gerais possui
um relevo bastante acidentado (Amarante et al., 2010) em uma area de 586.852,35 km2
(Minas Gerais, 2018), restringir a regiao de aplicacao para locais com caracterısticas
topograficas semelhantes pode auxiliar em uma estimacao mais fidedigna dos efeitos
espaciais.
Por fim, pretende-se estender a aplicacao dos modelos de pos-processamento propostos
no presente trabalho para outras variaveis meteorologicas, independente da simetria da
distribuicao (e.g. precipitacao, temperatura de superfıcie (2 m), pressao atmosferica e
velocidade do vento em outras altitudes), e compara-los com os existentes na literatura
em contextos admitidos por estes.
67

Referencias Bibliograficas
Amarante, O. d., Silva, F., e Andrade, P. (2010). “Atlas Eolico: Minas Gerais.” Belo
Horizonte: CEMIG .
Banerjee, S., Carlin, B. P., e Gelfand, A. E. (2014). Hierarchical modeling and analysis
for spatial data. Crc Press.
Bao, L., Gneiting, T., Grimit, E. P., Guttorp, P., e Raftery, A. E. (2010). “Bias correction
and Bayesian model averaging for ensemble forecasts of surface wind direction.”
Monthly Weather Review , 138, 5, 1811–1821.
Bardossy, A. e Plate, E. J. (1992). “Space-time model for daily rainfall using atmospheric
circulation patterns.” Water Resources Research, 28, 5, 1247–1259.
Barry, R. G. e Chorley, R. J. (2009). Atmosfera, tempo e clima. Bookman Editora.
Berrocal, V. J., Raftery, A. E., e Gneiting, T. (2007). “Combining spatial statistical and
ensemble information in probabilistic weather forecasts.” Monthly Weather Review ,
135, 4, 1386–1402.
Berrocal, V. J., Raftery, A. E., Gneiting, T., et al. (2008). “Probabilistic quantitative
precipitation field forecasting using a two-stage spatial model.” The Annals of Applied
Statistics , 2, 4, 1170–1193.
Bidlot, J.-R., Holmes, D. J., Wittmann, P. A., Lalbeharry, R., e Chen, H. S. (2002).
“Intercomparison of the performance of operational ocean wave forecasting systems
with buoy data.” Weather and Forecasting , 17, 2, 287–310.
68

Black, T. L. (1994). “The new NMC mesoscale Eta model: Description and forecast
examples.” Weather and forecasting , 9, 2, 265–278.
Box, G. E. e Cox, D. R. (1964). “An analysis of transformations.” Journal of the Royal
Statistical Society. Series B (Methodological), 211–252.
Carter, C. K. e Kohn, R. (1994). “On Gibbs sampling for state space models.”
Biometrika, 81, 3, 541–553.
Charney, J. G., Fjortoft, R., e Neumann, J. v. (1950). “Numerical integration of the
barotropic vorticity equation.” Tellus , 2, 4, 237–254.
Chou, S., Souza, C. d., Gomes, J. L., Evangelista, E., Osorio, C., e Cataldi, M. (2007).
“Refinamento estatıstico das previsoes horarias de temperatura a 2 m do modelo Eta
em estacoes do Nordeste do Brasil.” Revista Brasileira de Meteorologia, 22, 3, 287–296.
Cressie, N. (1993). Statistics for spatial data. New York: Wiley.
Dempster, A. P., Laird, N. M., e Rubin, D. B. (1977). “Maximum likelihood from
incomplete data via the EM algorithm.” Journal of the royal statistical society. Series
B (methodological), 1–38.
Eddelbuettel, D., Francois, R., Allaire, J., Ushey, K., Kou, Q., Russel, N., Chambers, J.,
e Bates, D. (2011). “Rcpp: Seamless R and C++ integration.” Journal of Statistical
Software, 40, 8, 1–18.
Epstein, E. S. (1969). “Stochastic dynamic prediction.” Tellus , 21, 6, 739–759.
Feldmann, K., Scheuerer, M., e Thorarinsdottir, T. L. (2015). “Spatial postprocessing
of ensemble forecasts for temperature using nonhomogeneous Gaussian regression.”
Monthly Weather Review , 143, 3, 955–971.
Fruhwirth-Schnatter, S. (1994). “Data augmentation and dynamic linear models.”
Journal of time series analysis , 15, 2, 183–202.
Gamerman, D. (1997). Markov Chain Monte Carlo: Stochastic Simulation for Bayesian
Inference. London: Chapman & Hall.
69

Gel, Y., Raftery, A. E., e Gneiting, T. (2004). “Calibrated probabilistic mesoscale weather
field forecasting: The geostatistical output perturbation method.” Journal of the
American Statistical Association, 99, 467, 575–583.
Gelfand, A. E., Zhu, L., e Carlin, B. P. (2001). “On the change of support problem for
spatio-temporal data.” Biostatistics , 2, 1, 31–45.
Glahn, H. R. e Lowry, D. A. (1972). “The use of model output statistics (MOS) in
objective weather forecasting.” Journal of applied meteorology , 11, 8, 1203–1211.
Glasbey, C. e Nevison, I. (1997). “Rainfall modelling using a latent Gaussian variable.”
Lecture Notes in Statistics , 122, 5, 233–242.
Gneiting, T. (2014). Calibration of medium-range weather forecasts . European Centre
for Medium-Range Weather Forecasts.
Gneiting, T. e Raftery, A. E. (2007). “Strictly proper scoring rules, prediction, and
estimation.” Journal of the American Statistical Association, 102, 477, 359–378.
Gneiting, T., Raftery, A. E., Westveld III, A. H., e Goldman, T. (2005). “Calibrated
probabilistic forecasting using ensemble model output statistics and minimum CRPS
estimation.” Monthly Weather Review , 133, 5, 1098–1118.
Grimit, E. P. e Mass, C. F. (2007). “Measuring the ensemble spread–error relationship
with a probabilistic approach: Stochastic ensemble results.” Monthly weather review ,
135, 1, 203–221.
Hutchinson, M. (1995). “Stochastic space-time weather models from ground-based data.”
Agricultural and Forest Meteorology , 73, 3-4, 237–264.
INPE/CPTEC (2018). “Instituto Nacional de Pesquisas Espaciais — Centro de Previsao
de Tempo e Estudos Climaticos — Eta Model — Regional.” http://etamodel.cptec.
inpe.br/. Acessado em 15/05/2018.
Kalman, R. E. (1960). “A new approach to linear filtering and prediction problems.”
Journal of basic Engineering , 82, 1, 35–45.
70

Kalnay, E. (2003). Atmospheric modeling, data assimilation and predictability .
Cambridge University Press.
Klein, W. H., Lewis, B. M., e Enger, I. (1959). “Objective prediction of five-day mean
temperatures during winter.” Journal of Meteorology , 16, 6, 672–682.
Krishnamurti, T. (1995). “Numerical weather prediction.” Annual review of fluid
mechanics , 27, 1, 195–225.
Kwa, C. (2001). “The rise and fall of weather modification: changes in American attitudes
toward technology, nature, and society.” Changing the Atmosphere: expert knowledge
and environmental governance, 135–65.
Landberg, L., Myllerup, L., Rathmann, O., Petersen, E. L., Jørgensen, B. H., Badger, J.,
e Mortensen, N. G. (2003). “Wind resource estimation—an overview.” Wind Energy ,
6, 3, 261–271.
Lange, M. (2005). “On the uncertainty of wind power predictions—Analysis of the
forecast accuracy and statistical distribution of errors.” Journal of solar energy
engineering , 127, 2, 177–184.
Leutbecher, M. e Palmer, T. N. (2008). “Ensemble forecasting.” Journal of
Computational Physics , 227, 7, 3515–3539.
Liu, F., West, M., et al. (2009). “A dynamic modelling strategy for Bayesian computer
model emulation.” Bayesian Analysis , 4, 2, 393–411.
Liu, Y., Warner, T. T., Bowers, J. F., Carson, L. P., Chen, F., Clough, C. A., Davis,
C. A., Egeland, C. H., Halvorson, S. F., Huck Jr, T. W., et al. (2008). “The operational
mesogamma-scale analysis and forecast system of the US Army Test and Evaluation
Command. Part I: Overview of the modeling system, the forecast products, and how
the products are used.” Journal of Applied Meteorology and Climatology , 47, 4, 1077–
1092.
71

Mao, Q., McNider, R. T., Mueller, S. F., e Juang, H.-M. H. (1999). “An optimal model
output calibration algorithm suitable for objective temperature forecasting.” Weather
and forecasting , 14, 2, 190–202.
Matheson, J. E. e Winkler, R. L. (1976). “Scoring rules for continuous probability
distributions.” Management science, 22, 10, 1087–1096.
Mera, R. J., Niyogi, D., Buol, G. S., Wilkerson, G. G., e Semazzi, F. H. (2006). “Potential
individual versus simultaneous climate change effects on soybean (C 3) and maize (C
4) crops: an agrotechnology model based study.” Global and Planetary Change, 54, 1,
163–182.
Mesinger, F., Janjic, Z. I., Nickovic, S., Gavrilov, D., e Deaven, D. G. (1988). “The
step-mountain coordinate: model description and performance for cases of Alpine
lee cyclogenesis and for a case of an Appalachian redevelopment.” Monthly Weather
Review , 116, 7, 1493–1518.
Metropolis, N., Rosenbluth, A. W., Rosenbluth, M. N., Teller, A. H., e Teller, E. (1953).
“Equation of state calculations by fast computing machines.” The journal of chemical
physics , 21, 6, 1087–1092.
Minas Gerais, G. (2018). http://mg.gov.br/conheca-minas/geografia/. Acessado
em 15/05/2018.
Montgomery, D. C. e Peck, E. A. (1982). Introduction to linear regression analysis . Wiley.
Nelder, J. A. e Baker, R. J. (1972). Generalized linear models . Wiley Online Library.
Petris, G., Petrone, S., e Campagnoli, P. (2009). Dynamic Linear Models with R.
Springer.
Piani, C., Haerter, J., e Coppola, E. (2010). “Statistical bias correction for daily
precipitation in regional climate models over Europe.” Theoretical and Applied
Climatology , 99, 1-2, 187–192.
72

Prado, R. e West, M. (2010). Time series: modeling, computation, and inference. CRC
Press.
Raftery, A. E., Gneiting, T., Balabdaoui, F., e Polakowski, M. (2005). “Using Bayesian
model averaging to calibrate forecast ensembles.” Monthly Weather Review , 133, 5,
1155–1174.
Raftery, A. E., Karny, M., e Ettler, P. (2010). “Online prediction under model uncertainty
via dynamic model averaging: Application to a cold rolling mill.” Technometrics , 52,
1, 52–66.
Raftery, A. E., Madigan, D., e Hoeting, J. A. (1997). “Bayesian model averaging for
linear regression models.” Journal of the American Statistical Association, 92, 437,
179–191.
Richardson, L. (1922). Weather Prediction by Numerical Process . Cambridge University.
Robert, C. P. (2004). Monte carlo methods . Wiley Online Library.
Sanderson, C. e Curtin, R. (2016). “Armadillo: a template-based C++ library for linear
algebra.” Journal of Open Source Software.
Sanso, B. e Guenni, L. (1999). “Venezuelan rainfall data analysed by using a Bayesian
space–time model.” Journal of the Royal Statistical Society: Series C (Applied
Statistics), 48, 3, 345–362.
Schuhen, N., Thorarinsdottir, T. L., e Gneiting, T. (2012). “Ensemble model output
statistics for wind vectors.” Monthly weather review , 140, 10, 3204–3219.
Sharman, R., Tebaldi, C., Wiener, G., e Wolff, J. (2006). “An integrated approach to
mid-and upper-level turbulence forecasting.” Weather and forecasting , 21, 3, 268–287.
Sloughter, J. M., Gneiting, T., e Raftery, A. E. (2010). “Probabilistic wind speed
forecasting using ensembles and Bayesian model averaging.” Journal of the american
statistical association, 105, 489, 25–35.
73
Sloughter, J. M. L., Raftery, A. E., Gneiting, T., e Fraley, C. (2007). “Probabilistic
quantitative precipitation forecasting using Bayesian model averaging.” Monthly
Weather Review , 135, 9, 3209–3220.
Stidd, C. (1973). “Estimating the precipitation climate.” Water Resources Research, 9,
5, 1235–1241.
Tanner, M. A. e Wong, W. H. (1987). “The calculation of posterior distributions by data
augmentation.” Journal of the American statistical Association, 82, 398, 528–540.
Thomson, M. C., Palmer, T., Morse, A. P., Cresswell, M., e Connor, S. J. (2000).
“Forecasting disease risk with seasonal climate predictions.” The Lancet , 355, 9214,
1559–1560.
Thorarinsdottir, T. L. e Gneiting, T. (2010). “Probabilistic forecasts of wind speed:
ensemble model output statistics by using heteroscedastic censored regression.” Journal
of the Royal Statistical Society: Series A (Statistics in Society), 173, 2, 371–388.
Thorarinsdottir, T. L. e Johnson, M. S. (2012). “Probabilistic wind gust forecasting using
nonhomogeneous Gaussian regression.” Monthly Weather Review , 140, 3, 889–897.
Triantafyllopoulos, K. (2002). “On observational variance learning for multivariate
Bayesian time series and related models.” Ph.D. thesis, University of Warwick.
Vihola, M. (2012). “Robust adaptive Metropolis algorithm with coerced acceptance rate.”
Statistics and Computing , 22, 5, 997–1008.
Warner, T. T. (2010). Numerical weather and climate prediction. Cambridge University
Press.
West, M. e Harrison, P. (1997). Bayesian forecasting and dynamic models . 2nd ed.
Springer Verlag, New York.
Whitaker, J. S. e Loughe, A. F. (1998). “The relationship between ensemble spread and
ensemble mean skill.” Monthly weather review , 126, 12, 3292–3302.
74

Wilks, D. S. (2006). Statistical Methods in the Atmospheric Sciences: An Introduction.
Elsevier.
Willmott, C. J. (1981). “On the validation of models.” Physical geography , 2, 2, 184–194.
Wilson, L. J. e Vallee, M. (2002). “The Canadian updateable model output statistics
(UMOS) system: Design and development tests.” Weather and forecasting , 17, 2,
206–222.
75

Apendice A
Outros Modelos de
Pos-Processamento Estatıstico
A.1 Bayesian Model Average
O metodo Bayesian Model Average (BMA, Raftery et al., 1997) e uma abordagem
Bayesiana para combinar modelos estatısticos concorrentes e possui uma ampla aplicacao
nas ciencias sociais e da saude. Sua vantagem em relacao a outras tecnicas, como a analise
de regressao convencional, e a ponderacao de multiplos modelos, nao considerando um
unico modelo como o melhor. SuponhaM = {M1, ...,Mm} um conjunto discreto e finito
de modelos disponıveis, entao, a distribuicao a posteriori da variavel de interesse Y dado
o conjunto de dados D e:
p(Y |D) =m∑k=1
p(Y |Mk, D)P (Mk|D). (A.1)
Em suma, o BMA e a distribuicao de mistura resultante da media das distribuicoes
a posteriori de Y dado cada modelo Mk ponderada pela probabilidade a posteriori dos
modelos.
O metodo BMA foi aplicado como procedimento de pos-processamento estatıstico
inicialmente por Raftery et al. (2005). Neste contexto, cada membro do ensemble Fk
e individualmente associado a uma distribuicao de probabilidade g (i.e, aplicacao do
metodo MOS (secao 2.1.1) individualmente para cada membro do ensemble Fk) sendo
76

compreendido como um modelo unico Mk e a probabilidade a posteriori dos modelos
p(Mk|D), vista como peso ωk, e interpretada como a probabilidade a posteriori do
membro Fk, apos calibracao, ser o que melhor preve o fenomeno meteorologico de interesse
Y . A distribuicao preditiva do metodo BMA e dada pela distribuicao de mistura:
p(Y |F1, ..., Fm) =m∑k=1
ωkgk(Y |Fk), (A.2)
com os pesos ωk sendo nao negativos e∑m
k=1 ωk = 1. Para a estimacao dos parametros
desconhecidos do metodo BMA calibrando a temperatura de superfıcie e a pressao
ao nıvel do mar, Raftery et al. (2005) supoem normalidade na distribuicao do erro
aleatorio e utilizam a estimativa de maxima verossimilhanca a partir do algoritmo
iterativo EM (Dempster et al., 1977). Mais aplicacoes deste metodo para outros tipos de
variaveis climaticas (e.g. precipitacao, velocidade e direcao do vento) supondo distintas
distribuicoes de probabilidade para o erro aleatorio, podem ser encontradas em Sloughter
et al. (2007), Sloughter et al. (2010) e Bao et al. (2010), respectivamente.
A.2 Bayesian Model Average Espacial
O metodo Bayesian Model Average Espacial (BMA espacial, Berrocal et al., 2007)
combina os metodos BMA (secao A.1) e GOP (secao 2.2.1), aproveitando os benefıcios
de ambos os metodos. Este metodo se assemelha a tecnica original, tendo sua funcao
preditiva como uma media ponderada das densidades de previsao individuais com pesos
que refletem a habilidade dos membros da previsao. A distribuicao preditiva do metodo
BMA espacial e dada pela distribuicao de mistura:
p(Ys|Fs1 , ...,Fsm) =m∑k=1
ωkgk(Ys|Fsk). (A.3)
Analogamente a sua versao univariada, os pesos ωk sao nao negativos e∑m
k=1 ωk =
1. Para a estimacao dos parametros do BMA espacial calibrando a temperatura de
superfıcie, Berrocal et al. (2007) consideraram primeiro ajustar o modelo BMA original.
Dado as estimativas para os parametros do BMA, o modelo GOP e ajustado para cada
membro do ensemble Fsk , k = 1, ...,m, separadamente. Combinando as estimativas de
77

ambos os procedimentos, os parametros do BMA Espacial sao obtidos. O metodo descrito
em Berrocal et al. (2007) foi projetado para variaveis meteorologicas com distribuicao
simetrica e com domınio em R. Em Berrocal et al. (2008), um procedimento de pos-
processamento espacial foi desenvolvido para precipitacao, onde os autores adaptaram a
versao univariada do BMA para precipitacao proposto por Sloughter et al. (2007).
78

Apendice B
Criterios de Comparacao de Modelos
B.1 Raiz Quadrada do Erro Quadratico Medio
A raiz quadrada do Erro Quadratico Medio (rEQM) e definida por:
rEQM(y1, ..., yn) =
√√√√ 1
n
n∑i=1
(yi − yi)2,
com yi representando o i-esimo valor observado e yi, o valor previsto para yi.
B.2 Erro Absoluto Medio
O Erro Absoluto Medio e definido por:
EAM(y1, ..., yn) =1
n
n∑i=1
|yi − yi|,
com yi representando o i-esimo valor observado e yi, o valor previsto para yi.
B.3 Indice de Concordancia de Willmott
O Indice de Concordancia de Willmott (Willmott, 1981) e uma medida padronizada
do grau de erro de predicao. Variando entre 0 (ausencia de concordancia) e 1
(correspondencia perfeita), e dado por:
ICW(y1, ..., yn) = 1−∑n
i=1 (yi − yi)2∑ni=1 (|yi − y|+ |yi − y|)2
,
79

com yi representando o i-esimo valor observado, yi, o valor previsto para yi e y =
1n
∑ni=1 yi.
B.4 Interval Score
O Interval Score (Gneiting e Raftery, 2007) e uma regra de pontuacao intuitiva para
previsoes intervalares considerando o intervalo de predicao central com nıvel (1−α)×100%
o qual, tem extremidades definidas pelos quantis preditivos nos nıveis α2
e 1 − α2. O
previsor e recompensado por intervalos estreitos e penalizado quando nao ha a cobertura
da previsao. O IS medio e dado por:
IS(y1, ..., yn) =1
n
n∑i=1
(ui − li) +2
α(li − xi)1 {xi < li}+
2
α(xi − ui)1 {xi > ui}
com yi representando o i-esimo valor observado e li e ui, respectivamente, os limites
inferior, obtido pelo quantil α2, e superior, obtido pelo quantil 1− α
2, de previsao para yi.
80

Apendice C
Distribuicoes Condicionais
Completas
C.1 Vetor parametrico β
A distribuicao condicional completa de β, vetor de parametros relacionado com a
relacao dispersao-proficiencia no modelo EMOS espaco-temporal, e dada por:
p(β|θ1:T , φ, λY1:T ) ∝T∏t=1
|Σ∗t (β)|−1/2
× exp
{−1
2
T∑t=1
(Xt − F′tθt)′Σ∗t (β)−1(Xt − F′tθt)
}.
(C.1)
Assim, p(β|θ1:T , φ, λ,Y1:T ) nao possui forma analıtica conhecida. A distribuicao
condicional completa de β no modelo EMOS espacial e obtida de forma analoga.
C.2 Parametro φ
A distribuicao condicional completa de φ, parametro que representa a taxa de
decaimento exponencial no modelo EMOS espaco-temporal, e dada por:
81

p(φ|θ1:T ,β, λ,Y1:T ) ∝T∏t=1
|Σ∗t (φ)|−1/2
× exp
{−1
2
T∑t=1
(Xt − F′tθt)′Σ∗t (φ)−1(Xt − F′tθt)
}.
(C.2)
Assim, p(φ|θ1:T ,β, λ,Y1:T ) nao possui forma analıtica conhecida. A distribuicao
condicional completa de φ nos modelos EMOS espacial e GOP dinamico e obtida de
forma analoga.
C.3 Parametro λ
A distribuicao condicional completa de λ, parametro da transformacao potencia no
modelo EMOS espaco-temporal, e dada por:
p(λ|θ1:T ,β, φ,Y1:T ) ∝ exp
{−1
2
T∑t=1
(Xt(λ)− F′tθt)′Σ∗t−1(Xt(λ)− F′tθt)
}×∏Yit>c
Y λ−1it .
(C.3)
Assim, p(λ|θ1:T ,β, φ,Y1:T ) nao possui forma analıtica conhecida. A distribuicao
condicional completa de λ nos modelos EMOS espacial e GOP dinamico e obtida de
forma analoga.
C.4 Processo Espacial latente Zt(s)
Para o modelo Normal Truncado (Stidd, 1973; Hutchinson, 1995), supoe-se que Xt(s)
e um Processo Gaussiano latente que coordena um outro Processo Espacial assimetrico a
partir de uma transformacao conhecida f . Simplificando a construcao em (2.8), tem-se:
Xt(s) =
f(Yt(s)), se f(Yt(s)) ≥ c,
Zt(s), se f(Yt(s)) < c.
Note que o Processo Espacial Zt(s) e acrescentado para lidar com a censura
do Processo de estudo quando f(Yt(s)) < c com f(Yt(s)) e Zt(s) ocorrendo
82

de forma complementar. Defina como Xt,s = (xt(s1), ..., xt(sn))′, f(Yt,s) =
(f(yt(s1))), ..., f(yt(sn))))′ e Zt,s = (zt(s1), ..., zt(sn))′. Assim, o PG Xt,s e particionado
da seguinte maneira:
Xt,s =
f(Yt,s)
Zt,s
|Θ ∼ N
µf(Yt)µZt
,
Σf(Yt) Σf(Yt),Zt
Σ′f(Yt),ZtΣZt
.
Conforme as propriedades da distribuicao Normal e Normal Truncada e a restricao
imposta pela censura supondo distribuicao Normal Truncada para Yt(s), chega-se a
distribuicao condicional completa de Zt,s dada por:
Zt,s|f(Yt,s), Θ ∼ NT(−∞,BC(c;λ))(µZ∗t ,ΣZ∗t),
com µZ∗t = µZt+ Σ′f(Yt),Zt
Σ−1f(Yt)(f(Yt,s)− µf(Yt)) e ΣZ∗t= Σ′f(Yt),Zt
Σ−1f(Yt)Σf(Yt),Zt .
C.5 Processo Espacial latente Ut(s)
A prosseguir com o desenvolvimento anterior, Ut(s) e introduzido para contornar
possıveis dados faltantes. Assim como no caso anterior, ocorre de forma complementar
aos outros Processos latentes. Baseando-se na estrutura completa apresentada em (2.8),
Ut(s) nao possui restricao com relacao a domınio. Seja Y∗t,s = (f(Yt,s),Zt,s)′ e Ut,s =
(ut(s1), ..., ut(sn))′. O PG Xt,s e particionado da seguinte maneira:
Xt,s =
Y∗t,s
Ut,s
|Θ ∼ N
µY ∗tµUt
,
ΣY ∗tΣY ∗t ,Ut
Σ′Y ∗t ,UtΣUt
.
Conforme as propriedades da distribuicao Normal, chega-se a distribuicao condicional
completa de Ut,s dada por:
Ut,s|Y∗t,s, Θ ∼ N(µU∗t ,ΣU∗t),
com µU∗t = µUt+ Σ′Y ∗t ,Ut
Σ−1Y ∗t (Y∗t,s − µY ∗t ) e ΣU∗t= Σ′Y ∗t ,Ut
Σ−1Yt ΣYt,Ut .
83

Apendice D
Algoritmo Robusto-Adaptativo de
Metropolis
O algoritmo Robusto-Adaptativo de Metropolis foi proposto por Vihola (2012) e e
uma extensao do algoritmo de Metropolis (Metropolis et al., 1953). De forma analoga
ao precursor, este metodo e utilizado quando amostras das distribuicoes condicionais
completas sao difıceis de serem geradas. Possui a vantagem de obter a convergencia
de forma mais eficiente quando ha grande quantidade de parametros sendo amostrados
dessa forma. Alem de gerar valores dos parametros de interesse θ = (θ1, ...θp)′, lida
simultaneamente com a probabilidade de aceitacao media α, ou taxa de aceitacao,
pre-fixando uma meta α∗ ∈ (0, 1) e definindo a distribuicao proposta q(.), de modo
independente, requerendo apenas que esta seja esfericamente simetrica e centrada em 0p.
Determine{ζ(k)}k≥1 como uma sequencia que decai para zero. O esquema de amostragem
e dado por:
1. Inicialize θ(0) = (θ(0)1 , ..., θ
(0)p )′, S(0) = s0Ip e k = 1;
2. Obtenha um novo valor para θ(k) a partir de θ(k−1) da seguinte forma:
(a) Gere um valor para θ(k) a partir de:
θ(k) = θ(k−1) + S(k−1)V (k), V (k) ∼ q(.);
84

(b) Aceite o valor proposto em (a) com probabilidade de aceitacao α:
α(k) = min
{1,p(θ(k)|θ(k−1), y)q(θ(k−1)|θ(k))p(θ(k−1)|θ(k), y)q(θ(k)|θ(k−1))
};
(c) Calcule a matriz triangular inferior S(k) com os elementos da diagonal principal
positivos de forma que satisfaca:
S(k)S ′(k)
= S(k−1)
(Ip + ζ(k)(α(k) − α∗)V
(k)V ′(k)
‖V (k)‖2
)S ′
(k−1)
3. Atribua k = k+ 1 e volte para 2, repetindo o procedimento ate que a convergencia
seja alcancada.
Nomeia-se de passeio aleatorio quando amostra-se de θ(k) a partir de θ(k−1) sendo a
taxa de aceitacao otima para este de ≈ 23, 4%. Assim, α∗ = 0, 234. De forma interligada,
ha a indicacao de que s0 = 2.4√p
para que o algoritmo atinja a convergencia de forma mais
agil.
85

Apendice E
Modelos Dinamicos
Os Modelos Lineares Dinamicos (MLD) sao um caso particular dos Modelos de Espaco
de Estado (MEE).
E.1 Modelo Linear Dinamico
Considerando uma serie temporal n-dimensional Yt, t = 1, 2, ..., o MLD e definido
por:
Equacao de Observacao: Yt = F′tθt + εt, εt ∼ N(0n,Vt), (E.1a)
Equacao de Evolucao: θt = Gtθt−1 + ωt, ωt ∼ N(0p,Wt), (E.1b)
Informacao Inicial: θ0|D0 ∼ N(m0,C0). (E.1c)
Assume-se que as sequencias de erros observacionais εt e de evolucao ωt sao
independentes ao longo do tempo, entre si e da informacao inicial θ0|D0. Para t = 1, 2, ...:
– θt e um vetor p-dimensional denominado vetor de estados;
– F′t e uma matriz n × p conhecida denominada matriz de design com variaveis
independentes;
– Gt e uma matriz p× p conhecida denominada matriz de evolucao dos estados;
86
– Vt e a matriz de covariancia associada ao erro observacional εt;
– Wt e a matriz de covariancia associada ao erro de evolucao ωt.
A equacao de observacao em (E.1a) relaciona o vetor de observacoes Yt ao parametro
de estado θt onde assume-se independencia entre si condicional a θt, dependendo somente
deste. A equacao de evolucao em (E.1b) e responsavel pela evolucao dos parametros de
estado atraves do tempo.
Denota-se por Dt = {Yt,Dt−1} o conjunto de informacoes disponıveis ate o instante
de tempo t em que D0 denota o conjunto de informacoes no instante inicial t = 0.
O modelo descrito em (E.1) e completamente especificado pela quadrupla
{F,G,V,W}t e pela distribuicao a priori Normal assumida para os parametros de estado
em (E.1c), onde m0 e C0 sao, respectivamente, a media e a matriz de covariancia dadas
para θ0 refletindo a incerteza do processo no instante inicial.
O erro εt e uma pertubacao aleatoria no processo de medida das observacoes Yt. Em
contraste, o erro de evolucao ωt influencia no desenvolvimento do sistema ao longo do
tempo. A suposicao de que estes erros sao independentes dentre e entre si, reforca a
distincao destas fontes de variacao estocastica.
E.2 Filtro de Kalman
Para a inferencia sobre a estrutura dos dados e previsao de observacoes futuras da
serie, emprega-se o filtro de Kalman (Kalman, 1960) que e um procedimento recursivo que
baseia-se nas informacoes disponıveis. Especificamente, no contexto do MLD, o processo
do Filtro de Kalman e resumido por:
– Distribuicao a posteriori no tempo t− 1:
θt−1|Dt−1 ∼ N(mt−1,Ct−1);
– Distribuicao a priori no tempo t:
θt|Dt−1 ∼ N(at,Rt),
onde at = Gtmt−1 e Rt = GtCt−1G′t + Wt;
87

– Previsao um passo a frente:
Yt|Dt−1 ∼ N(ft,Qt),
onde ft = F′tat e Qt = F′tRtFt + Vt;
– Distribuicao a posteriori no tempo t:
θt|Dt ∼ N(mt,Ct),
onde mt = at + Atet e Ct = Rt −AtQtA′t com At = RtFtQ
−1t e et = yt − ft.
A demonstracao e feita por inducao utilizando propriedades da distribuicao Normal
e pode ser encontrada na ıntegra em West e Harrison (1997).
E.3 Distribuicoes de Previsao
Para se fazer inferencia sobre Yt+k, para k ≥ 1, condicionado ao conhecimento
corrente Dt, sao necessarias as distribuicoes de θt+k|Dt e Yt+k|Dt. Estas, sao dadas
por:
– Distribuicao de estado k passos a frente:
θt+k|Dt ∼ N(at(k),Rt(k))
sendo definido recursivamente por:
at(k) = Gt+kat(k − 1) e Rt(k) = Gt+kRt(k − 1)G′t+k + Wt+k
com valores iniciais at(0) = mt e Rt(0) = Ct;
– Distribuicao de previsao k passos a frente:
Yt+k|Dt ∼ N(ft(k),Qt(k)),
onde ft = F′t+kat(k) e Qt(k) = F′t+kRt(k)Ft+k + Vt+k.
A demonstracao pode ser encontrada em West e Harrison (1997) e Petris et al. (2009).
88

E.4 Fatores de Desconto
A especificacao da magnitude de Wt e importante pois, controla a extensao da
variacao estocastica na evolucao do modelo e assim, determinam a estabilidade ao longo
do tempo. Na equacao de evolucao em (E.1b), Wt leva a um aumento da incerteza
ou a uma perda de informacao sobre o vetor de estado antecessor. Considerando um
MLD, a especificacao de Wt pode ser feita indiretamente atraves do uso de descontos.
Considerando o filtro para o MLD (secao E.2) onde Rt = V ar(θt|Dt−1) = Pt + Wt
e Pt = GtCt−1G′t. Sendo assim, Wt = Rt − Pt e Pt seria a covariancia caso nao
houvesse incerteza sobre a evolucao dos estados, i.e., Wt = 0p. Definindo δ de forma que
Rt = Pt/δ, pode-se interpretar δ como a percentagem de informacao que se atualiza de
t− 1 para t e entao:
Wt =1− δδ
Pt,
com δ ∈ (0, 1] denominado fator de desconto. Se δ = 1 entao, Wt = 0p e nao ha perda
de informacao na evolucao do estado θt−1 para θt, de forma que Cov(θt|Dt−1) = Pt. Ha
a possibilidade de utilizar multiplos fatores de desconto por meio da matriz de desconto
p× p definida por:
∆ = diag(δ−1/21 , ..., δ−1/2p ).
Assim, Rt = ∆GtCt−1G′t∆.
Na pratica, o valor do fator de desconto e frequentemente fixado, variando entre 0,8
e 0,99.
E.5 Esquema de Amostragem para MLD
Para lidar com Modelos Dinamicos em que a distribuicao a posteriori nao esteja
disponıvel analiticamente, e usual que se utilize metodos MCMC (secao D) decompondo
o esquema em 2 blocos:
(i) Amostragem dos estados condicionados aos parametros estaticos;
(ii) Amostragem dos parametros estaticos condicionados ao vetor de estados.
89

Em particular, nos MLD, o vetor de estados pode ser amostrado utilizando-se um
tipo de amostrador de Gibbs chamado Forward Filtering Backward Sampling (FFBS).
Proposto por Fruhwirth-Schnatter (1994) e Carter e Kohn (1994), o esquema FFBS
tem por objetivo amostrar, de forma eficiente, o vetor de estados de um MLD como
o apresentado em (E.1). O algoritmo consiste em amostrar o vetor de estados
conjuntamente utilizando as distribuicoes filtradas e suavizadas destes parametros. A
amostragem pode ser decomposta em 2 passos da seguinte maneira:
1. Forward Filtering:
Este passo consiste na inferencia dos parametros utilizando o filtro de Kalman
(Kalman, 1960) a partir das definicoes apresentadas na secao E.2.
2. Backward Sampling:
Este passo baseia-se na analise retrospectiva, a partir da decomposicao da
distribuicao a posteriori conjunta dos parametros de estado da seguinte forma:
p(θ0, ...,θT |DT ) = p(θT |DT )T∏t=0
p(θt|θt+1,Dt).
Pelo Teorema de Bayes, obtem-se para t = T − 1, ..., 0:
p(θt|θt+1,DT ) ∝ (θt+1|θt,DT )p(θt|DT ).
Especificamente no contexto do MLD, tem-se:
θt|DT ∼ N(ht,Ht),
onde ht = mt + CtG′t+1R
−1t+1(θt+1 − at+1) e Ht = Ct − CtG
′t+1R
−1t+1Gt+1Ct com
valores iniciais hT = mT e HT = CT .
E.6 MLD com Covariancias Estocasticas e
Aprendizado por Descontos
Na pratica, dificilmente se conhece a covariancia observacional Vt ao longo do tempo.
O MLD com covariancias estocasticas e aprendizado por descontos contorna esta situacao
90

utilizando um passeio aleatorio por meio de uma evolucao estocastica Beta-Gama para
a sequencia de precisao observacional V−1t . Neste contexto, suponha um MLD com a
restricao Vt = σ2t In e ϕt = 1/σ2
t sendo definido por:
Equacao de Observacao: Yt = F′tθt + εt, εt ∼ N(0n, σ2t In), (E.2a)
Equacao de Evolucao: θt = Gtθt−1 + ωt, ωt ∼ Tnt−1(0p,Wt), (E.2b)
Equacao de Precisao: ϕt = γtϕt−1/δ∗, γt ∼ Beta(κt, κt), (E.2c)
Informacao Inicial: θ0|D0 ∼ Tn0(m0,C0),
ϕ0|D0 ∼ G(n0/2, d0/2). (E.2d)
com κt = δ∗nt−1/2 e κt = (1 − δ∗)nt−1/2. O parametro δ∗ ∈ [0, 1] atua como um fator
de desconto, i.e., quanto maior seu valor, menor o choque aleatorio para a covariancia
observacional. Quando δ∗ = 1, a covariancia se torna constante, i.e., Vt = V, ∀t.
As hipoteses usuais de independencia definidas na secao E.1 permanecem, no entanto,
condicionais a Vt. Especificado o modelo, determina-se as equacoes de atualizacao por:
– Distribuicao a posteriori no tempo t− 1:
θt−1|Dt−1 ∼ Tnt−1(mt−1,Ct−1) e ϕt−1|Dt−1 ∼ G(nt−1/2, dt−1/2);
– Distribuicao a priori no tempo t:
θt|Dt−1 ∼ Tnt−1(at,Rt) e ϕt|Dt−1 ∼ G(δ∗nt−1/2, δ∗dt−1/2),
onde at = Gtmt−1 e Rt = GtCt−1G′t + Wt;
– Previsao um passo a frente:
Yt|Dt−1 ∼ Tδ∗nt−1(ft,Qt),
onde ft = F′tat e Qt = F′tRtFt + St−1In com St−1 = dt−1/nt−1;
– Distribuicao a posteriori no tempo t:
θt|Dt ∼ N(mt,Ct) e ϕt|Dt ∼ G(nt/2, dt/2),
onde mt = at+Atet e Ct = (St/St−1)Rt−AtQtA′t com At = RtFtQ
−1t , et = yt−ft,
nt = δ∗nt−1 + 1, dt = δ∗dt−1 + St−1e′tQtet e St = dt/nt.
91

O algoritmo FFBS pode ser aplicado de forma analoga a demonstrada na secao E.5.
O passo Backward Sampling para os parametros ϕt com t = T − 1, ..., 0 e dado por:
ϕt|DT ∼ G(n∗t/2, d∗t/2),
onde n∗t = (1− δ∗)nt + δ∗nt+1 e d∗t = n∗tS∗t com S∗t = ((1− δ∗)/St + δ∗/S∗t+1)
−1 e valores
iniciais n∗T = nT e d∗T = dT .
Para demonstracoes e mais informacoes acerca desta configuracao de MLD, consulte
West e Harrison (1997) e Prado e West (2010). Aplicacoes podem ser encontradas em
Liu et al. (2009). Para a estimacao sequencial da covariancia observacional Vt ao longo
do tempo sem a restricao apresentada em (E.2), veja Triantafyllopoulos (2002).
92

Apendice F
Resultados Adicionais
De forma arbitraria, escolheu-se ilustrar os resultados na ıntegra, com respeito aos
parametros, para o ajuste feito no mes de outubro de ambas aplicacoes.
(a) β0 (b) β1
(c) φ (d) λ
Figura F.1: Cadeias MCMC para os parametro estaticos do modelo EMOS espacial na
aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha tracejada vertical
representa o perıodo de aquecimento.
93

(a) β0 (b) β1
(c) φ (d) λ
Figura F.2: Cadeias MCMC para os parametro estaticos do modelo EMOS espaco-
temporal na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha tracejada
vertical representa o perıodo de aquecimento.
(a) φ (b) λ
Figura F.3: Cadeias MCMC para os parametro estaticos do modelo GOP dinamico na
aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha tracejada vertical
representa o perıodo de aquecimento.
94
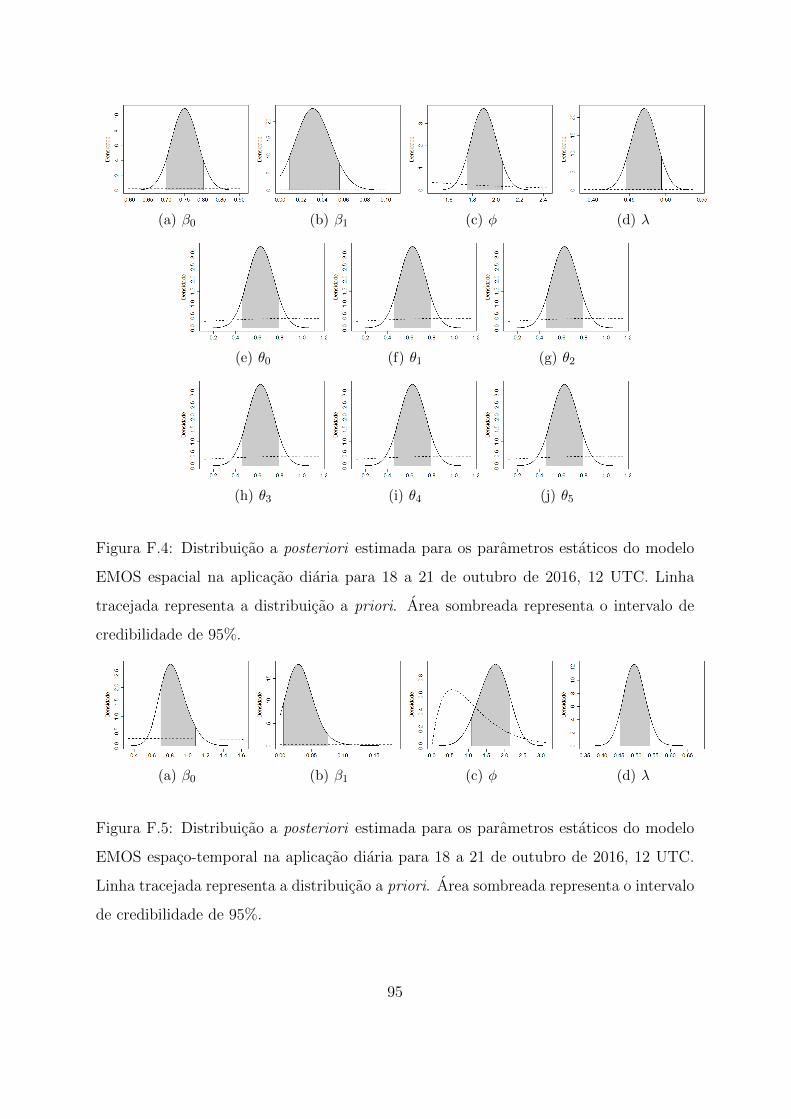
(a) β0 (b) β1 (c) φ (d) λ
(e) θ0 (f) θ1 (g) θ2
(h) θ3 (i) θ4 (j) θ5
Figura F.4: Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espacial na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha
tracejada representa a distribuicao a priori. Area sombreada representa o intervalo de
credibilidade de 95%.
(a) β0 (b) β1 (c) φ (d) λ
Figura F.5: Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espaco-temporal na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC.
Linha tracejada representa a distribuicao a priori. Area sombreada representa o intervalo
de credibilidade de 95%.
95

(a) θ0 (b) θ1 (c) θ2
(d) θ3 (e) θ4 (f) θ5
Figura F.6: Trajetoria a posteriori estimada para os parametros dinamicos do modelo
EMOS espaco-temporal na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC.
Linha contınua representa a media a posteriori. Area sombreada representa o intervalo
de credibilidade de 95%.
(a) σ2 (b) φ (c) λ
Figura F.7: Distribuicao a posteriori estimada para os parametros estaticos do modelo
GOP dinamico na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha
tracejada representa a distribuicao a priori. Area sombreada representa o intervalo de
credibilidade de 95%.
96

(a) θ0 (b) θ1 (c) θ2
(d) θ3 (e) θ4 (f) θ5
Figura F.8: Trajetoria a posteriori estimada para os parametros dinamicos do modelo
GOP dinamico na aplicacao diaria para 18 a 21 de outubro de 2016, 12 UTC. Linha
contınua representa a media a posteriori. Area sombreada representa o intervalo de
credibilidade de 95%.
97
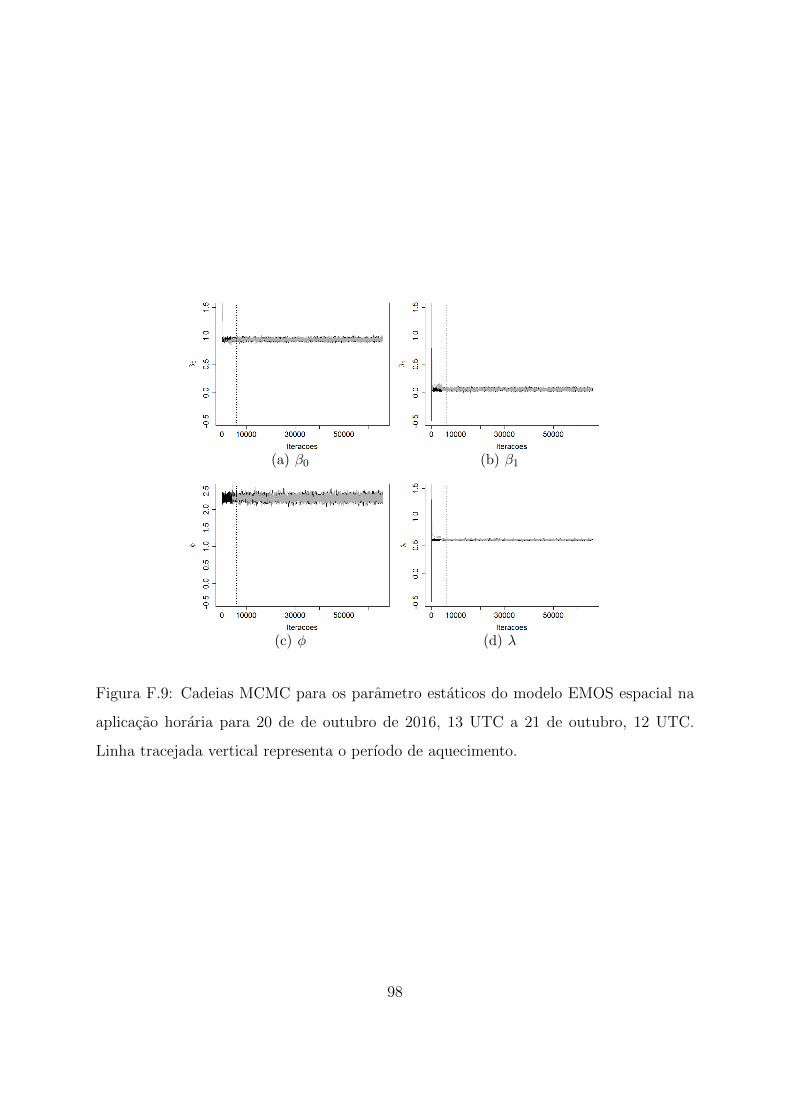
(a) β0 (b) β1
(c) φ (d) λ
Figura F.9: Cadeias MCMC para os parametro estaticos do modelo EMOS espacial na
aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de outubro, 12 UTC.
Linha tracejada vertical representa o perıodo de aquecimento.
98

(a) β0 (b) β1
(c) φ (d) λ
Figura F.10: Cadeias MCMC para os parametro estaticos do modelo EMOS espaco-
temporal na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de outubro,
12 UTC. Linha tracejada vertical representa o perıodo de aquecimento.
(a) φ (b) λ
Figura F.11: Cadeias MCMC para os parametro estaticos do modelo GOP dinamico na
aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de outubro, 12 UTC.
Linha tracejada vertical representa o perıodo de aquecimento.
99
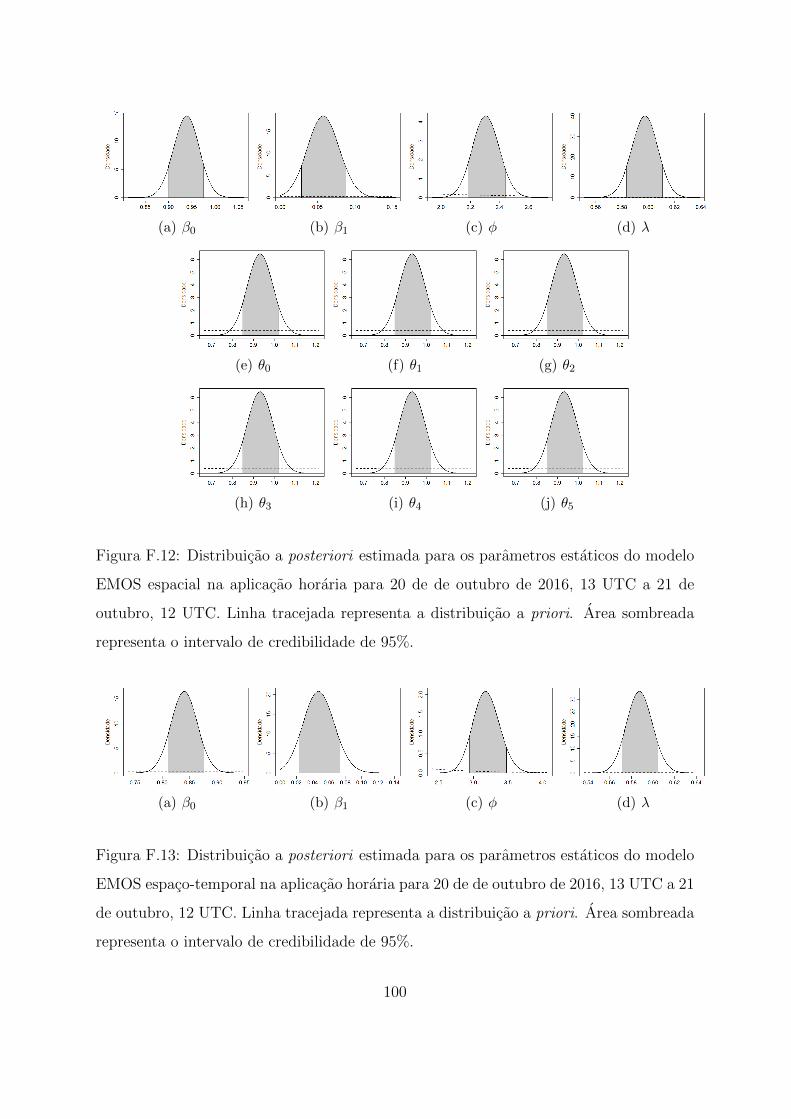
(a) β0 (b) β1 (c) φ (d) λ
(e) θ0 (f) θ1 (g) θ2
(h) θ3 (i) θ4 (j) θ5
Figura F.12: Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espacial na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de
outubro, 12 UTC. Linha tracejada representa a distribuicao a priori. Area sombreada
representa o intervalo de credibilidade de 95%.
(a) β0 (b) β1 (c) φ (d) λ
Figura F.13: Distribuicao a posteriori estimada para os parametros estaticos do modelo
EMOS espaco-temporal na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21
de outubro, 12 UTC. Linha tracejada representa a distribuicao a priori. Area sombreada
representa o intervalo de credibilidade de 95%.
100

(a) θ0 (b) θ1 (c) θ2
(d) θ3 (e) θ4 (f) θ5
(g) θ6
Figura F.14: Trajetoria a posteriori estimada para os parametros dinamicos do modelo
EMOS espaco-temporal na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a
21 de outubro, 12 UTC. Linha contınua representa a media a posteriori. Area sombreada
representa o intervalo de credibilidade de 95%.
(a) σ2 (b) φ (c) λ
Figura F.15: Distribuicao a posteriori estimada para os parametros estaticos do modelo
GOP dinamico na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de
outubro, 12 UTC. Linha tracejada representa a distribuicao a priori. Area sombreada
representa o intervalo de credibilidade de 95%.
101

(a) θ0 (b) θ1 (c) θ2
(d) θ3 (e) θ4 (f) θ5
(g) θ6
Figura F.16: Trajetoria a posteriori estimada para os parametros dinamicos do modelo
GOP dinamico na aplicacao horaria para 20 de de outubro de 2016, 13 UTC a 21 de
outubro, 12 UTC. Linha contınua representa a media a posteriori. Area sombreada
representa o intervalo de credibilidade de 95%.
102

Apendice G
Simulacao dos Modelos Propostos
G.1 Scripts
Scripts disponıveis em https://github.com/gomesleduardo/Calibration_
EtaModel.
G.2 Graficos de Simulacoes
(a) φ (b) λ
Figura G.1: Tracos das cadeias MCMC dos parametros estaticos (simulados) do modelo
GOP dinamico. Linha vermelha representa o valor verdadeiro.
103

(a) φ (b) λ
Figura G.2: Distribuicao a posteriori estimada para os parametros estaticos (simulados)
do modelo GOP dinamico. Linha vermelha representa o valor verdadeiro. Linha tracejada
representa a distribuicao a priori e linha contınua, a distribuicao a posteriori. Area
sombreada representa o intervalo de credibilidade de 95%.
(a) θ0 (b) θ1
(c) θ2 (d) θ3
Figura G.3: Trajetoria a posteriori estimada para os parametros dinamicos (simulados)
do modelo GOP dinamico. Linha vermelha representa o valor verdadeiro. Linha tracejada
representa a media a posteriori. Area sombreada representa o intervalo de credibilidade
de 95%.
104

(a) β0 (b) β1
(c) φ (d) λ
Figura G.4: Tracos das cadeias MCMC dos parametros estaticos (simulados) do modelo
EMOS espaco-temporal. Linha vermelha representa o valor verdadeiro.
105

(a) β0 (b) β1
(c) φ (d) λ
Figura G.5: Distribuicao a posteriori estimada para os parametros estaticos (simulados)
do modelo EMOS espaco-temporal. Linha vermelha representa o valor verdadeiro. Linha
tracejada representa a distribuicao a priori e linha contınua, a distribuicao a posteriori.
Area sombreada representa o intervalo de credibilidade de 95%.
106
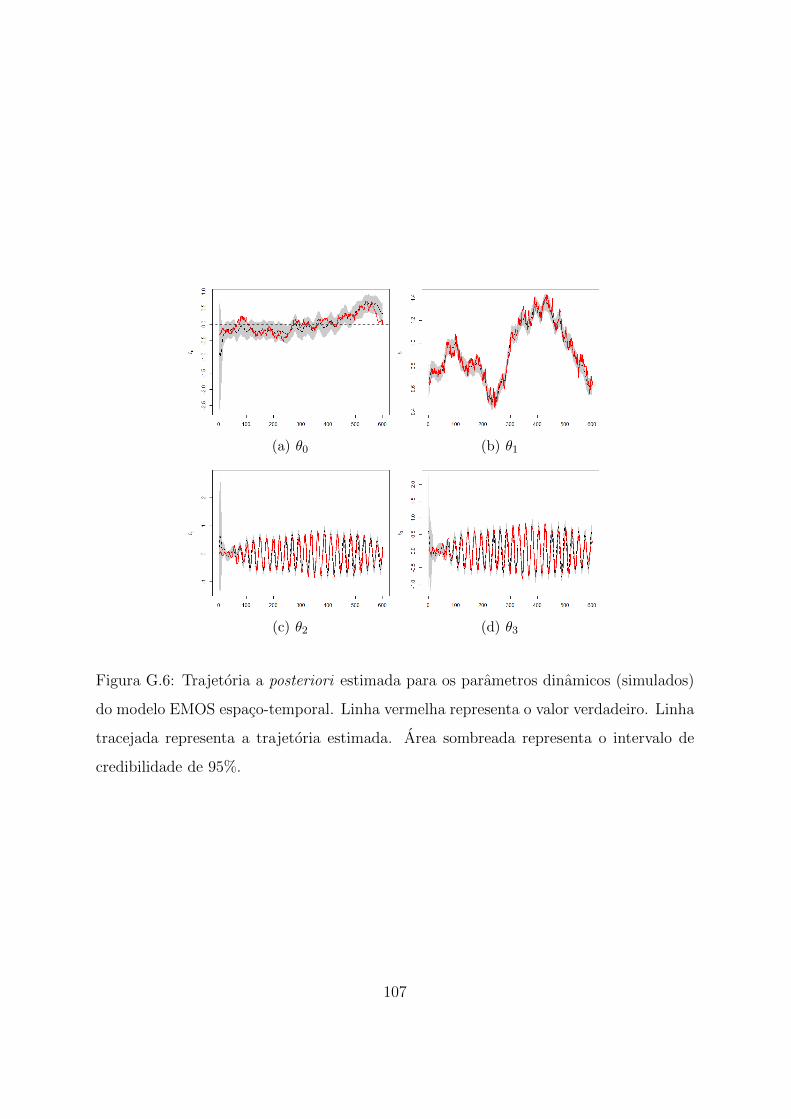
(a) θ0 (b) θ1
(c) θ2 (d) θ3
Figura G.6: Trajetoria a posteriori estimada para os parametros dinamicos (simulados)
do modelo EMOS espaco-temporal. Linha vermelha representa o valor verdadeiro. Linha
tracejada representa a trajetoria estimada. Area sombreada representa o intervalo de
credibilidade de 95%.
107