Embed Size (px)
Citation preview

Capitolo 7
OSSERVABILITA E STIMA
DELLO STATO
I concetti di osservabilita e ricostruibilita si riferiscono alla possibilita di deter-minare lo stato di un sistema a partire da dati di ingresso e di uscita. Tali concettisi dimostrano particolarmente importanti nei problemi di controllo nei quali siarichiesto di conoscere, istante per istante, il valore dello stato. Non sempre essoe disponibile o misurabile ma, come vedremo, le proprieta di osservabilita e ri-costruibilita sono strettamente legate alla possibilita di realizzare algoritmi ingrado di fornire “stime” dello stato in tempo reale.
La determinazione del valore dello stato in un certo istante t puo essere af-frontata come un problema di osservabilita, quando i dati di cui si dispone siriferiscono a tempi successivi a t, oppure come un problema di ricostruibilita se idati sono relativi a tempi precedenti t. Mentre l’osservabilita dello stato implicala ricostruibilita, per i sistemi discreti il viceversa in generale non e vero.
7.1 Osservabilita dei sistemi lineari e discreti
Definizione [Stato non osservabile in k passi] Dato un sistema discretoΣ = (F, G, H), lo stato x e non osservabile in k passi se per ogni successione diingresso
u(0),u(1), . . . ,u(k − 2)
le successioni di uscita y(·) e y′(·) che corrispondono rispettivamente allo stato
1

2 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
iniziale x e allo stato iniziale 0 coincidono negli istanti 0, 1, . . . , k − 1, ovvero se
y(t) =t−1∑
σ=0
HF t−1−σu(σ) + HF tx
= y′(t) =t−1∑
σ=0
HF t−1−σu(σ) t = 0, 1, . . . , k − 1. (7.1)
Pertanto, x e non osservabile in k passi se non esiste alcun “esperimento” in-gresso/uscita sull’intervallo [0, k − 1] che consenta di stabilire se lo stato inizialedel sistema e 0 oppure x.Indipendentemente dalla successione di ingresso, la (7.1) equivale ad assumere
0 = y(t) − y′(t) = HF tx, t = 0, 1, . . . , k − 1 (7.2)
ovvero
x ∈ ker
H
HF...
HF k−1
= kerOk (7.3)
Ok e chiamata matrice di osservabilita in k passi e associa allo stato x ∈ X ilvettore
Okx =
yℓ(0)yℓ(1)
...yℓ(k − 1)
,
che rappresenta la successione di uscita in evoluzione libera indotta da x sull’intervallo[0, k − 1]. Da quanto detto, segue che
• per stabilire se uno stato x non e osservabile in k passi basta verificarese esso induce sull’intervallo [0, k − 1] un’uscita in evoluzione libera nulla,coincidente quindi con quella indotta dallo stato 0.
• l’insieme degli stati non osservabili in k passi, in quanto nucleo della matriceOk, e un sottospazio vettoriale di X, che chiameremo (sotto)spazio nonosservabile in k passi del sistema e denoteremo con Xno
k .
Il sottospazio non osservabile in k passi include quello non osservabile in k + 1passi: cio discende immediatamente dalla struttura delle matrici Ok e Ok+1 o, piu

7.1. OSSERVABILITA DEI SISTEMI LINEARI E DISCRETI 3
semplicemente, dal fatto che se uno stato induce un’uscita in evoluzione liberanulla fino all’istante k, allora la induce nulla fino all’istante k − 1. Si ha cosı lacatena di inclusioni
Xno1 ⊇ Xno
2 ⊇ . . . ⊇ Xnok ⊇ Xno
k+1 ⊇ . . . (7.4)
Lemma 7.1.1 Se Xnok = Xno
k+1, allora Xnok+1 = Xno
k+2.
Prova Tenendo conto di (7.4), basta verificare che x ∈ Xnok+1 implica x ∈ Xno
k+2.Nel fatto, se x appartiene a Xno
k+1, lo stato Fx appartiene a Xnok e quindi, per
l’ipotesi, a Xnok+1. Allora lo stato x, presente all’istante t = 0, e in Xno
k+2 percheinduce un’evoluzione libera nulla negli istanti 0, 1, . . . , k + 1.
Proposizione 7.1.2 [Sottospazio non osservabile] In un sistema Σ =(F, G, H) di dimensione n la catena di sottospazi (7.4) dal passo n-esimo in poie stazionaria (i.e. costante):
Xno1 ⊇ Xno
2 ⊇ . . . ⊇ Xnpn = Xno
n+1 = . . . (7.5)
Il sottospazioXno := Xno
n = Xnon+1 = . . . (7.6)
e detto (sotto)spazio non osservabile ed e costituito dagli stati iniziali ai qualicorrisponde un’uscita in evoluzione libera nulla su [0, +∞).
Prova Se H e la matrice nulla, la catena (7.4) e stazionaria gia dal primo passo.Se H 6= 0, lo spazio Xno
1 ha dimensione non superiore a n − 1. Nel caso in cuile inclusioni fino allo spazio Xno
n siano tutte proprie, Xnon e lo spazio nullo e la
catena e certamente stazionaria dopo il passo n; se la catena presenta un segnodi eguaglianza prima del passo n, basta applicare il Lemma 7.1.1.
Il sottospazio non osservabile Xno del sistema Σ = (F, G, H) (o, piu brevemente,della coppia (F, H)) e pertanto il nucleo della matrice di osservabilita in n passi,di dimensione np×n. Essa sara chiamata matrice di osservabilita e denotata conO
O := On =
H
HF...
HF n−1
. (7.7)

4 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Il sottospazio Xno contiene solo il vettore 0} se e solo se la matrice di osservabiltaha rango n: in tal caso il sistema e detto osservabile e lo stato zero e l’unico aindurre un’uscita libera identicamente nulla.
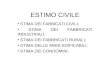
Esempio 7.1.1 Si consideri il sistema discreto, con una sola uscita, di figura 1
- k+ - z−1 -x1(t + 1) x1(t)
6
λ1�
h1
- k+ - z−1 -x2(t + 1) x2(t)
6
λ2�
h2
?
6
k+ -y(t)
Figura 1
Dalle equazioni di stato in evoluzione libera
x1(t + 1) = λ1x1(t)x2(t + 1) = λ2x2(t)
y(t) = h1x1(t) + h2x2(t)
si ricavano le matrici F ed H
F =
[λ1 00 λ2
]
, H = [h1 h2 ] .
e quindi la matrice di osservabilita
O =
[H
HF
]
=
[h1 h2
λ1h1 λ2h2
]
Essa ha rango 2, e il sistema e osservabile, se e solo se h1 e h2 sono entrambi non nulli eλ1 6= λ2.
E facile verificare che se, ad esempio, h1 6= 0 e h2 = 0 allora Xno = span
[01
]
, mentre se
h1 e h2 sono entrambi non nulli ma λ1 = λ2 = λ, allora lo spazio non osservabile e
Xno = kerO = ker
[h1 h2
λh1 λh2
]
= {x =
[x1
x2
]
: h1x1 + h2x2 = 0}

7.1. OSSERVABILITA DEI SISTEMI LINEARI E DISCRETI 5
Se il sistema e osservabile in k passi, e possibile determinarne lo stato ini-ziale a partire dalle successioni di ingresso u(0),u(1), . . . ,u(k − 2) e di uscitay(0),y(1), . . . ,y(k − 1). Ricordando che l’uscita in evoluzione libera e data da
yℓ(·) = y(·) − yf (·)
e che l’uscita in evoluzione forzata yf (·) e calcolabile a partire dall’ingresso u(·),possiamo ricavare yℓ(0), yℓ(1), . . . , yℓ(k − 1) dai dati disponibili e ricondurci alproblema di determinare lo stato iniziale a partire da yℓ(·).Poiche il vettore che rappresenta l’uscita in evoluzione libera su [0, k − 1] appar-tiene all’ immagine di Ok, l’equazione
yℓ(0)yℓ(1)
...yℓ(k − 1)
=
H
HF...
HF k−1
x(0) = Okx(0) (7.8)
e risolubile per qualche stato iniziale x(0). Inoltre, essendo nullo il nucleo di Ok,tale stato iniziale e unico e, come e facile verificare, e individuato dalla relazione
x(0) = [OTk Ok]
−1OT
yℓ(0)yℓ(1)
...yℓ(k − 1)
(7.9)
Osservazione Se i dati di cui si dispone sono affetti da rumore, i valori di yℓ(·) che ven-gono utilizzati in (7.8) non corrispondono all’evoluzione libera indotta dallo stato inizialeeffettivamente presente e possono addirittura non appartenere a ImOk. In quest’ultimocaso, essi non rappresentano alcuna uscita libera possibile del sistema e la (7.8) non am-mette soluzioni. Lo stato individuato dalla (7.9) a partire dai dati rumorosi ha tuttaviauna qualche rilevanza ai fini del problema, essendo fra tutti i vettori di R
nquello che da
luogo all’uscita in evoluzione libera piu prossima in norma all’uscita rumorosa yℓ(·) chesi e utilizzata.
Supponiamo infatti di voler determinare uno stato iniziale x(0) cui corrisponda un’evo-luzione libera dell’uscita che meno si discosti dall’uscita affetta da rumore, che abbiamoeffettivamente a disposizione
yℓ := [yℓ(0)T yℓ(1)T . . . yℓ(k − 1)T ]T
.
Cio equivale a risolvere in x(0) il seguente problema di minimo
minx(0)
||yℓ −Okx(0)|| (7.10)

6 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
ovvero, scomponendo yℓ nella forma yℓ = y1 + y2 , con y1 ∈ ImOk e y2 ∈ ImO⊥
k =kerOT
k , il problema equivalente
minx(0)
||y1 −Okx(0)||2 + ||y2||2 (7.11)
E’ chiaro che in (7.11) il valore minimo e raggiunto in corrispondenza all’unico stato x(0)che risolve l’equazione
Okx(0) = y1. (7.12)
Poiche OTk y2 = 0, tale stato risolve anche l’ equazione
OTk Okx(0) = OT
k y1 = OTk (y1 + y2) = OT
k yℓ. (7.13)
Ma OTk Ok e matrice non singolare, quindi (7.13) ha il vettore [OT
k Ok]−1OT yℓ come unicasoluzione, che pertanto coincide con la soluzione di (7.12).
La nozione di non osservabilita si riferisce, come abbiamo visto, all’ impossi-bilita di stabilire sulla base del comportamento ingresso/uscita se lo stato inizialedel sistema coincide con lo stato 0. Essa rappresenta un caso particolare dellanozione di indistinguibilita fra due stati arbitrari, che puo essere studiata moltosemplicemente basandosi sui risultati finora ottenuti.
Definizione [Indistinguibilita’ nel futuro] Gli stati x′ e x” sono indi-stinguibili (nel futuro) in k passi (notazione: x′ ∼
kx”) se per ogni successione
di ingresso u(0),u(1), . . . ,u(k − 2) le successioni di uscita y′(·) e y”(·) che cor-rispondono allo stato iniziale x′ e allo stato iniziale x” coincidono negli istanti0, 1, . . . , k − 1, ovvero se
y′(t) = HF tx′ +t−1∑
σ=0
HF t−1−σu(σ)
= HF tx” +t−1∑
σ=0
HF t−1−σu(σ) = y′(t) t = 0, 1, . . . , k − 1. (7.14)
x′ e x” sono indistinguibili nel futuro (notazione x′ ∼ x”) se la (7.14) vale perogni k ≥ 0.
E facile verificare che x′ ∼k
x” se e solo se x′ e x” inducono la medesima evoluzione
libera negli istanti 0, 1, . . . , k − 1 e quindi se e solo se x′ − x” e in Xnok .
L’indistinguibilita nel futuro di x′ e x” si ha quando i due stati inducono lemedesime uscite su [0, +∞) e si riconduce al fatto che x′ − x” appartenga allospazio non osservabile Xno.

7.1. OSSERVABILITA DEI SISTEMI LINEARI E DISCRETI 7
La relazione di indistinguibilita in k passi e quella di indistinguibilita sono re-lazioni di equivalenza (i.e. riflessive, simmetriche e transitive). Le classi di equi-valenza in cui risulta partizionato lo spazio di stato X hanno in entrambi i casiuna struttura molto semplice: per la indistinguibilita in k passi la classe checontiene il vettore x contiene tutti e soli i vettori del tipo
x + v, v ∈ Xnok ,
e viene denotata con x + Xnok ; per l’indistinguibilita, la classe che contiene x e
costituita dai vettori
x + v, v ∈ Xno
e si indica con x + Xno.
Se il sistema e osservabile (osservabile in k passi), Xno (Xnok ) coincide con {0},
ogni classe di indistinguibilita (di indistinguibilita in k passi) contiene esattamenteuno stato. Due stati iniziali diversi inducono evoluzioni libere diverse (diversesull’intervallo [0, k − 1]), cosicche - come visto in precedenza - lo stato inizialerisulta individuato univocamente dai dati di ingresso e di uscita.
Se il sistema non e osservabile, le classi di equivalenza contengono ciascuna infinitivettori e dai dati ingresso/uscita si individua la classe alla quale lo stato inizialeappartiene, ma non il particolare elemento della classe al quale lo stato inizialecorrisponde. In altre parole, si puo determinare lo stato iniziale soltanto a menodi un vettore di Xno
k o di Xno, circa il quale non si puo avere alcuna informazione.
Osservazione Se Xnok ha dimensione maggiore o eguale a 1 ed e disponibile (diretta-
mente, o indirettamente a partire dai dati ingresso/uscita) l’uscita in evoluzione libera,l’equazione (7.8) e risolubile, ma la soluzione non e unica. La soluzione generale e co-stituita da una soluzione particolare x(0) di (7.8) cui va aggiunto un vettore arbitrariodi kerOk = Xno
k . La classe di indistinguibilita in k passi x(0) + Xnok rappresenta percio
la totalita degli stati iniziali in grado di render conto dell’uscita in evoluzione liberaconsiderata.
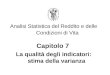
Esempio 7.1.2 Con riferimento al sistema dell’esempio 7.1.1, si ponga λ1 = λ2 = λ eh1 = h2 = 1. Il sottospazio non osservabile (ovvero il sottospazio non osservabile in 2passi) e
Xno = {
[x1
x2
]
: x1 = −x2}
e le classi di equivalenza sono le rette parallele alla retta xl = −x2.
Gli stati x′ e x′′ sono indistinguibili, mentre sono fra loro distinguibili x′ e x′′′.

8 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
A partire dall’uscita in evoluzione libera si puo dedurre a quale retta di R2
appartengalo stato iniziale, ma non si puo dire nulla circa la sua posizione sulla retta. Ad esempio,se l’uscita vale
yℓ(0) = 2, yℓ(1) = 2λ
lo stato iniziale e una qualsiasi soluzione dell’equazione[
22λ
]
=
[H
HF
] [x1(0)x2(0)
]
=
[1 1λ λ
] [x1(0)x2(0)
]
-
6
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@
@@Xno
ba x′
bax′′
bax′′′
Figura 2
Una soluzione particolare e[
x1(0)x2(0)
]
=
[11
]
e la soluzione generale e data da[
11
]
+ Xno2 = {
[11
]
+
[α
−α
]
, α ∈ R}
7.2 Ricostruibilita dei sistemi lineari discreti
Si supponga ora di disporre dei valori dell’ingresso u(0),u(1), . . . ,u(k−2) edell’uscita y(0),y(1), . . . ,y(k−1) e di voler determinare lo stato del sistemaall’istante finale k − 1.
Se il sistema e osservabile in k passi, il problema ha una soluzione unica,dal momento che gli ingressi e le uscite nell’intervallo [0, k− 1] individuanox(0) e quindi, tramite la
x(k − 1) = F k−1x(0) +k−2∑
σ=0
F k−2−σGu(σ) (7.15)

7.2. RICOSTRUIBILITA DEI SISTEMI LINEARI DISCRETI 9
lo stato in k − 1.
Se il sistema non e osservabile in k passi, le successioni dei valori di ingressoe di uscita non determinano univocamente lo stato iniziale, ma solo la classedi indistinguibilita x(0) + Xno
k alla quale esso appartiene. In altre parole,possiamo soltanto dire che, se x(0) e uno stato iniziale compatibile con idati, lo sono tutti e soli gli stati della classe x(0) + Xno
k . In base a (7.15),sono allora ammissibili all’istante k−1 tutti e soli gli stati che possono essereottenuti partendo in t = 0 da un elemento qualsiasi della classe x(0)+Xno
k eapplicando la successione di ingresso assegnata. Essi costituiscono la classe
F k−1x(0) + F k−1Xnok +
k−2∑
σ=0
F k−2−σGu(σ) (7.16)
La classe (7.16) contiene un solo elemento e quindi lo stato all’istante k− 1e univocamente determinato, se e solo se il sottospazio non ricostruibile ink passi F k−1Xno
k contiene solo il vettore nullo, ovvero se
ker F k−1 ⊇ Xnok (7.17)
La (7.17) rappresenta la condizione necessaria e sufficiente affinche dai datidi ingresso e di uscita sull’intervallo [0, k − 1] sia possibile determinare uni-vocamente lo stato finale in t = k− 1. Il sistema e allora detto ricostruibilein k passi.
Si verifica immediatamente che
1. se un sistema discreto e osservabile in k passi, e anche ricostruibile in k
passi;
2. la ricostruibilita in k passi non implica necessariamente l’osservabilita ink passi;
3. se un sistema e ricostruibile in k passi, lo e anche in k + 1.
• Esercizio 7.2.1 Si dia un esempio di un sistema discreto che sia ricostruibile in2 passi, ma che risulti non osservabile in k passi, qualunque sia k.
• Esercizio 7.2.2 [Sottospazio non ricostruibile] Si dimostri che
(i) Il sottospazio non ricostruibile in k passi Xnrk := F k−1Xno
k , k ≥ 1, contienetutti e soli gli stati nei quali il sistema puo trovarsi all’istante t = k − 1 quandol’uscita in evoluzione libera e nulla su [0, k − 1];

10 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
(ii) Xnrk ⊇ Xnr
k+1;
(iii) Se Xnrk = Xnr
k+1 allora Xnrk+1 = Xnr
k+2
♯ Suggerimento: x ∈ Xnrk+1 equivale a supporre che x abbia la forma x = F kz,
per qualche z ∈ Xnok+1. Poiche x := F k−1z appartiene a Xnr
k , l’ipotesi di (iii)
comporta che x appartiene anche a Xnrk+1. Ma allora esiste z ∈ Xno
k+1 per cui
risulta x = F kz. Da F x = F kz = x segue x = F k+1z e da HF k+1z = HF kz = 0
segue z ∈ Xnok+2. Quindi x ∈ Xnr
k+2.
Il sistema Σ = (F, G, H) si dice ricostruibile se e ricostruibile in k passiper qualche k, ovvero se dalla conoscenza dei dati di ingresso e di uscita suun intervallo sufficientemente lungo e possibile determinare univocamentelo stato finale.
Proposizione 7.2.1 Sia Σ = (F, G, H) un sistema lineare discreto didimensione n. Sono fatti equivalenti:
i) Σ e ricostruibile
ii)
ker F n ⊇ ker
H
HF...
HF n−1
= Xno (7.18)
iii) Σ e ricostruibile in n + 1 passi.
Prova i) ⇒ ii) Osserviamo preliminarmente (si veda la Proposizione A.2.3)che, per ogni valore positivo di k, si ha
ker F n ⊇ ker F k (7.19)
Tenendo conto di (7.5) e di (7.19), se il sistema e ricostruibile in k passi perqualche k, si ha ker F k−1 ⊇ Xno
k e quindi
ker F n ⊇ ker F k−1 ⊇ Xnok ⊇ Xno
n = Xno (7.20)
che prova la (7.18).
ii) ⇒ iii) Da (7.18) segue ker F n ⊇ Xnon = Xno
n+1, che e la condizione diricostruibilita in n + 1 passi.
iii) ⇒ i) ovvio dalla definizione di sistema ricostruibile.

7.2. RICOSTRUIBILITA DEI SISTEMI LINEARI DISCRETI 11
Esempio 7.2.1 Si consideri il seguente modello di dinamica di una popolazionecon tre classi di eta, l’ultima delle quali postriproduttiva,
x1(t + 1) = α1x1(t) + α2x2(t)
x2(t + 1) = β1x1(t)
x3(t + 1) = β2x2(t)
ove αi, i = 1, 2 sono i tassi di fertilita e βi, i = 1, 2 i tassi di sopravvivenza. Sisupponga di registrare in ogni intervallo i nuovi nati, assumendo come uscita delsistema
y(t) = x1(t)
Le matrici del sistema (in evoluzione libera, in assenza di fenomeni migratori)sono allora
F =
α1 α2 0β1 0 00 β2 0
, H = [ 1 0 0 ]
Consideriamo i seguenti problemi:
P.1 determinare il vettore iniziale di popolazione x(0) a partire dalle registrazionidei nuovi nati negli intervalli successivi all’istante 0 (ovvero dalla conoscenza diy(0), y(1), . . .)
P.2 determinare il vettore di popolazione finale x(0) a partire dalle registrazionidei nuovi nati negli intervalli precedenti l’istante 0 (ovvero dalla conoscenza diy(0), y(−1), . . .)
Il problema P.1 e relativo alla proprieta di osservabilita mentre P.2 a quella diricostruibilita. Per quanto riguarda l’osservabilita, si ha
O =
1 0 0α1 α2 0
α21 + α2β1 α1α2 0
(7.21)
Se supponiamo che α2 sia positivo, ovvero se la seconda classe di eta e ripro-duttiva, (7.21) ha rango 2 e il sistema e non e osservabile, con sottospazio nonosservabile di dimensione 1. Dal momento che non tutte le popolazioni inizialix(0) sono distinguibili dalla popolazione nulla, P.1 non e risolubile. Piu specifi-camente, sono indistinguibili dalla popolazione nulla tutte le popolazioni inizialicostituite soltanto da individui della classe postriproduttiva, ovvero tutti i vettoridi popolazione del tipo
x =
00x3
, x3 ∈ R+
Per la ricostruibilita si hakerF 3 ⊇ kerO

12 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Quindi il sistema e ricostruibile e P.2 ha soluzione.
Si puo avere una verifica diretta della non risolvibilita di P. 1 scrivendo esplicita-mente il sistema di equazioni nelle incognite xi(0), i = 1, 2, 3. Da
y(0) = Hx(0) = x1(0)
y(1) = HFx(0) = α1x1(0) + α2x2(0)
y(2) = HF 2x(0) = (α21 + α2β1)x1(0) + α1α2x2(0)
si vede che x1(0) e x2(0) sono determinabili univocamente, mentre x3(0) noncompare nelle equazioni e puo quindi assumere qualsiasi valore. x3(0) non edeterminabile avendo a disposizione i numeri dei nuovi nati in istanti successivia 0, perche esso rappresenta il numero di individui della classe postriproduttiva,che non influenzano nel futuro l’uscita, ovvero il numero di individui della primaclasse.
Per quanto riguarda P.2, i dati a disposizione sono y(0), y(−1), y(−2), . . .. Dall’e-quazione
x(0) = Fx(−1) =
α1 α2 0β1 0 00 β2 0
x1(−1)x2(−1)x3(−1)
=
α1x1(−1) + α2x2(−1)β1x1(−1)β2x2(−1)
tenendo conto che y(t) = x1(t), si ha
y(0) = x1(0) = α1x1(−1) + α2x2(−1) = α1y(−1) + α2x2(−1)
x2(0) = β1x1(−1) = β1y(−1)
x3(0) = β2x2(−1)
Ricavando x2(−1) dalla prima e sostituendo nella terza, si ottiene infine
x1(0) = y(0)x2(0) = β1y(−1)
x3(0) =β2
α2y(0) −
α1β2
α2y(−1),
ovvero lo stato finale e ricostruibile (in due passi).
7.3 Osservabilita e ricostruibilita dei sistemi
lineari e continui
Vediamo ora alcuni metodi che consentono di studiare l’osservabilita e laricostruibilita nel caso di un sistema lineare, continuo, di dimensione n
x(t) = Fx(t) + Gu(t)

7.3. OSSERVABILITA E RICOSTRUIBILITA DEI SISTEMI LINEARI E CONTINUI13
y(t) = Hx(t) (7.22)
Uno stato x e non osservabile sull’intervallo [0, t], con t > 0, se per ognifunzione d’ingresso u(·) l’uscita y(·) corrispondente allo stato iniziale x
coincide su [0, t] con l’uscita corrispondente allo stato iniziale 0. Tenutoconto che le componenti forzate dell’uscita sono le stesse in entrambi i casi,x e non osservabile su [0, t] se e solo se
HeFσx = 0, 0 ≤ σ ≤ t (7.23)
Se indichiamo con ωt la mappa lineare
ωt : X → C[0, t]p : x 7→ HeFσx, 0 ≤ σ ≤ t (7.24)
che associa allo stato iniziale x la funzione d’uscita1 in evoluzione libera cheesso induce nell’intervallo [0, t], e chiaro che x non e osservabile su [0, t] see solo se x ∈ ker ωt. L’insieme degli stati non osservabili in [0, t] e allora unsottospazio
Xnot := ker ωt (7.25)
dello spazio di stato X, che chiameremo sottospazio non osservabile in [0, t].
La proposizione che segue consente di esprimere molto semplicemente ilsottospazio non osservabile Xno
t di un sistema continuo come nucleo diuna matrice. Poiche essa non dipende da t, ne consegue che Xno
t e inrealta indipendente dall’ampiezza, purche positiva, dell’intervallo sul qualesi conoscono i dati di ingresso e di uscita.
Proposizione 7.3.1 Il sottospazio non osservabile Xnot del sistema (7.22)
e, per ogni t > 0, il nucleo della matrice di osservabilita
O =
H
HF...
HF n−1
(7.26)
1con C[0, t]p indichiamo lo spazio delle funzioni continue in [0, t] e a valori in Rp

14 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Prova x e non osservabile in [0, t] se e solo se HeFσx = 0, ∀σ ∈ [0, t],ovvero se
∞∑
k=0
HF kx
k!σk = 0, ∀σ ∈ [0, t] (7.27)
Applicando il principio di identita delle serie di potenze e il teorema diCayley-Hamilton, la (7.27) e equivalente a HF kx = 0, k = 0, 1, 2, ....n − 1e quindi a
x ∈ kerO (7.28)
Poiche il sottospazio Xnot = kerO non dipende da t, esso sara indicato
piu semplicemente con Xno e chiamato sottospazio non osservabile, senzaulteriori specificazioni.
Se Xno = {0}, ovvero se O ha rango pieno n, diremo che (7.22) e osservabile.In questo caso l’uscita in evoluzione libera del sistema puo essere nulla inun intorno destro dell’istante 0 soltanto se lo stato iniziale e lo stato zero.
• Esercizio 7.3.1 Si supponga che il sistema (7.22) sia osservabile e in evoluzionelibera a partire dallo stato x(0) = x
(i) se l’uscita e nulla su qualche intervallo [τ1, τ2] con 0 ≤ τ1 < τ2, allora x = 0
(ii) se per j = 1, 2, . . . , p la componente j-esima yj(·) dell’uscita in evoluzionelibera si annulla su [τ1j , τ2j ], con 0 ≤ τ1j < τ2j , allora x = 0
♯ Suggerimento. Con il procedimento della Prop.7.4.1 si verifichi che eTj Ox = 0,
per j = 1, 2, . . . , p. Quindi Ox = 0.
• Esercizio 7.3.2 Il sottospazio non osservabile, sia per i sistemi discreti checontinui, e F -invariante e puo essere caratterizzato in termini geometrici come ilpiu grande sottospazio F -invariante contenuto in kerH
♯ Suggerimento. Per la F -invarianza si verifichi che x ∈ kerO ⇒ Fx ∈ kerO;l’inclusione kerO ⊆ kerH e ovvia; ogni sottospazio F -invariante V ⊆ kerH econtenuto in kerHF k, ∀k > 0.
Seguendo un ragionamento analogo a quello sviluppato per i sistemi di-screti, si puo introdurre anche per un sistema continuo la relazione di indi-stinguibilita (nel futuro) di due stati x′ e x′′. Essa si riconduce alla coinci-denza (su [0, +∞) o su qualsiasi intervallo non degenere [0, t]) delle uscitein evoluzione libera indotte dai due stati, ed equivale quindi alla condizione
x′ − x′′ ∈ Xno.

7.3. OSSERVABILITA E RICOSTRUIBILITA DEI SISTEMI LINEARI E CONTINUI15
Dai dati ingresso/uscita e possibile individuare la classe di equivalenzax(0) + Xno alla quale appartiene lo stato del sistema all’istante t = 0,ma non lo stato stesso, salvo il caso in cui il sistema risulti osservabile. Algenerico istante t > 0 sono allora compatibili con i dati ingresso/uscita tuttigli stati appartenenti alla classe
eFtx(0) + eFtXno +∫ t
0eF (t−σ)Gu(σ)dσ, (7.29)
quindi lo stato del sistema all’istante t e individuato univocamente se esolo se eFtXno = {0}. Per l’invertibilita della matrice esponenziale cio siverifica se e solo se Xno = {0} e la conclusione e che un sistema continuoe ricostruibile (su un arbitrario intervallo non degenere [0, t]) se e solo se ilsistema e osservabile.
Esempio 5.3.1 Nel circuito elettrico di figura
si assumano come ingresso u(·) la tensione applicata e come uscita la corrente y(·)assorbita dal circuito. Si supponga di poter registrare per un certo intervallo ditempo sia la tensione applicata che la corrente assorbita. Si vuole sapere se questeregistrazioni permettono di ricavare i valori che all’inizio dell’intervallo hanno lecorrenti nelle induttanze e la tensione ai capi del condensatore. Si tratta di unproblema di osservabilita. Per rispondere al quesito si scrivono le equazioni distato del circuito e si calcola la matrice di osservabilita.
Le equazioni di stato sono
x1(t) =1
L1(u(t) − x3(t))
x2(t) =1
L2(u(t) − x3(t))
x3(t) =1
C(x1(t) + x2(t))
y(t) = x1(t) + x2(t)

16 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
cui corrispondono le matrici F,g, H date da
F =
0 0 − 1L1
0 0 − 1L2
1C
1C
0
, g =
[ 1L1
1L2
]
, H = [ 1 1 0 ]
e la matrice di osservabilita
O =
H
HF
HF 2
=
1 1 00 0 −( 1
L1
+ 1L2
)
− 1C
( 1L1
+ 1L2
) − 1C
( 1L1
+ 1L2
) 0
ha rango 2. Quindi a partire da registrazioni di u e y non e determinabile la ternadi valori iniziali di x1, x2, x3.
Il sottospazio non osservabile e dato da
Xno = kerO = {x : x1 + x2 = 0, x3 = 0} = {
α
−α
0
, α ∈ R}
e due stati iniziali x′ e x” non sono distinguibili se x′ − x” ∈ kerO ovvero se
x′ − x” =
α
−α
0
per un qualche α reale.
Il risultato ottenuto ha un’interpretazione fisica molto semplice: la eventuale pre-senza di una corrente iniziale che si chiuda nella maglia costituita da L1 e L2 noninfluenza il comportamento del circuito visto dai terminali esterni.
Ricorrendo all’operatore aggiunto di ωt
ω∗
t : C[0, t]p → X : y(·) 7→∫ t
0eF T σHTy(σ)dσ (7.30)
possiamo ottenere un’ulteriore caratterizzazione del sottospazio non osser-vabile Xno
t . Infatti, dalle proprieta dell’operatore aggiunto
ker ωt = ker(ω∗
t ωt) = ker∫ t
0eF T σHT HeFσdσ, (7.31)
si ha che Xnot e il nucleo della matrice n × n
Vt :=∫ t
0eF T σHT HeFσdσ, (7.32)

7.4. DUALITA 17
detta gramiano di osservabilita relativo all’intervallo [0, t]. In particolare,risulta Xno
t = {0}, ovvero il sistema e osservabile, se e solo se il gramianoha rango n. In questo caso, se e disponibile l’andamento dell’uscita inevoluzione libera yℓ(·) sull’intervallo [0, t], da
yℓ = ωtx(0)
si haω∗
t yℓ = ω∗
t ωtx(0) = Vtx(0)
e quindi
x(0) = V−1t ω∗
t yℓ = [∫ t
0eF T σHT HeFσdσ]−1
∫ t
0eF T σHTyℓ(σ)dσ (7.33)
Osservazione Se i dati di cui si dispone sono affetti da rumore, procedendo comenel caso a tempo discreto si puo dimostrare che lo stato iniziale fornito dalla (7.33)e quello che da luogo all’uscita in evoluzione libera che meno si discosta in normadalla funzione yℓ(·). I dettagli sono lasciati come esercizio.
7.4 Dualita
La trattazione dei problemi relativi alla raggiungibilita e controllabilita edi quelli relativi all’osservabilita e ricostruibilita e stata svolta seguendodelle linee che mostrano una certa corrispondenza sia nelle definizioni chenei risultati. Tale corrispondenza trova una spiegazione in termini formaliricorrendo alla nozione di sistema duale.
Dato un sistema continuo o discreto Σ = (F, G, H), il sistema Σd :=(F T , HT , GT ) viene detto sistema duale di Σ. Il numero degli ingressi edelle uscite di Σd e uguale rispettivamente al numero delle uscite e degliingressi di Σ.
E immediato verificare che, dette Rd e Od le matrici di raggiungibilita eosservabilita di Σd, esse sono legate alle matrici R e O di Σ dalle relazioni
Rd = [ HT F T HT . . . (F T )n−1HT ] =
H
HF...
HF n−1
= OT (7.34)

18 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
e, analogamente,Od = RT (7.35)
Nel caso dei sistemi discreti, se Σ e controllabile, la condizione
ImF n ⊆ ImR
equivale a(ImF n)⊥ ⊇ (ImR)⊥,
quindi aker(F n)T = ker(F T )n ⊇ kerRT = kerOd
che e la condizione di ricostruibilita di Σd. Analogamente si vede che se Σe ricostruibile allora Σd e controllabile.
I legami dati dalle formule precedenti sono evidenziati nella seguente tabella:
Σ Σd
raggiungibile ⇔ osservabileosservabile ⇔ raggiungibile
controllabile ⇔ ricostruibilericostruibile ⇔ controllabile
L’utilita della nozione di sistema duale e fondamentalmente strumentale,perche consente di ottenere criteri e forme canoniche di osservabilita daicriteri e dalle forme canoniche di raggiungibilita. In particolare
1. dati due sistemi
Σ = (F, G, H) , Σ = (P−1FP, P−1G, HP )
algebricamente equivalenti, i corrispondenti duali sono dati da
Σd = (F T , HT , GT ) , Σd = (P TF T (P T )−1, P T HT , GT (P T )−1)
e risultano algebricamente equivalenti:
Σ = (F,G,H) P−→
Σ = (P−1FP,P−1G,HP )
l dual. l dual.
Σd = (F T ,HT , GT ) (P T )−1
−→Σd =
(
P T F T (P T )−1, P T HT , GT (P T )−1)
Se la matrice di cambiamento di base da Σ a Σ e P , quella da Σd aΣd e (P T )−1

7.4. DUALITA 19
2. (forma standard di osservabilita) Sia Σ = (F, G, H) un sistema nonosservabile. Allora Σd = (F T , HT , GT ) non e raggiungibile ed esisteuna matrice Q di cambiamento di base che lo riduce in forma standarddi raggiungibilita:
Σd = (Q−1F T Q, Q−1HT , GT Q) =( [
F T11 F T
21
0 F T22
]
,
[HT
1
0
]
, [ GT1 GT
2 ])
(7.36)con (F T
11, HT1 ) raggiungibile.
Il duale Σ di Σd e dato da
Σ = (F , G, H) =( [
F11 0F21 F22
]
,
[G1
G2
]
, [ H1 0 ])
, (7.37)
con la coppia (F11, H1) osservabile, perche ottenuta per dualita da unacoppia raggiungibile . Σ fornisce la forma standard di osservabilitadel sistema Σ, al quale e algebricamente equivalente con matrice dicambiamento di base P = (QT )−1. La situazione e rappresentata nelseguente diagramma:
Σ = (F,G,H) P=(QT )−1
−→Σ =
( [F11 0F21 F22
]
,
[G1
G2
]
, [ H1 0 ])
l dual. l dual.
Σd = (F T ,HT , GT ) Q−→
Σd =( [
F T11 F T
21
0 F T22
]
,
[HT
1
0
]
, [ GT1 GT
2 ])
La matrice P , che realizza il passaggio in forma standard di osser-vabilita del sistema non osservabile, e stata qui ottenuta dalla matriceQ che realizza, sul duale, il passaggio in forma standard di raggiun-gibilita. La sua inversa P−1 puo peraltro essere costruita diretta-mente dalla matrice di osservabilita di Σ, senza passare al sistemaduale: infatti le prime colonne di Q costituiscono un insieme mas-simale di colonne linearmente indipendenti di Rd, quindi le primerighe di QT = P−1 sono un insieme massimale di righe linearmenteindipendenti di RT
d = O.
3. Se indichiamo con x = P−1x la n-upla rappresentativa del vettoredi stato del sistema (7.37) e la partizioniamo in modo conforme alla

20 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
partizione delle matrici (F , G, H), otteniamo le equazioni
x1(t + 1) = F11x1(t) + G1u(t)
x2(t + 1) = F21x1(t) + F22x2(t) + G2u(t)
y(t) = H1x1(t)
cui corrisponde lo schema a blocchi di fig.l.
- G1- k+ - z−1I -
x1(t + 1) x1(t)
6
F11�
H1-
y(t)
- G2- k+ - z−1I
F21
x2(t + 1) x2(t)
6
F22�
Figura 1
�
?
-u(t)
Il sottosistema (F11, G1, H1) e detto sottosistema osservabile del si-stema (7.37). Poiche la coppia (F11, H1) e osservabile, lo stato diquesto sottosistema puo essere determinato sulla base dei dati di in-gresso e di uscita.
Il sottospazio non osservabile Xno del sistema (7.37) e costituito datutti e soli i vettori aventi nulle le componenti x1
Xno = {[x1
x2
]
: x1 = 0}

7.4. DUALITA 21
Infatti essi sono gli unici vettori di stato cui corrisponde, in evoluzionelibera, un’uscita del sistema (7.37) identicamente nulla. Il sottosis-tema (F22, G2, 0) detto sottosistema non osservabile.
4. E’ immediato verificare che la matrice di trasferimento del sistema(7.37), ovvero del sistema Σ = (F, G, H) ad esso algebricamente equiv-alente, coincide con la matrice di trasferimento del sottosistema os-servabile
W (z) = H(zI − F )−1G = H1(zI − F11)−1G1.
Questo risultato e anche ovvio dalla fig.1: qualunque sia l’ingressou(·), l’uscita y(·) e determinata soltanto dal sottosistema osservabilee, a partire da condizioni iniziali nulle, dalla matrice di trasferimentodi tale sottosistema.
5. (PBH test di osservabilita) Il sistema Σ = (F, G, H) e osservabile se esolo se la matrice [
F − zIn
H
]
(7.38)
ha rango pieno per ogni z complesso, o, equivalentemente, per ogniz nello spettro di F . La verifica e diretta, applicando il PBH test diraggiungibilita al sistema duale, ed e lasciata per esercizio.
6. (forma canonica di osservabilita per sistemi con un’uscita) Ogni sis-tema con una sola uscita e osservabile Σ = (F, G, H) e algebricamenteequivalente ad un sistema della forma
Fo = Q−1FQ =
0 0 −α0
1 0 −α1
1 −α2. . .
1 −αn−1
, G0 = Q−1G
H0 = HQ = [ 0 0 · · · 0 1 ] (7.39)
dove α0 + α1z + . . . + αn−1zn−1 + zn e il polinomio caratteristico di
F . Per verificare la (7.39) e sufficiente ridurre il sistema duale Σd informa canonica di controllo. La matrice Q e data da (P−1)T , doveP e la matrice di cambiamento di base che permette di ridurre Σd informa canonica di controllo.

22 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Q puo essere ottenuta direttamente dalle matrici di osservabilita O diΣ e Oo di (7.39). Si ha infatti
Oo = OQ
da cui
Q = O−1Oo (7.40)
7. Con procedimento simile a quello del punto precedente, si puo ot-tenere la forma canonica multivariabile di osservabilita per un sistemaosservabile Σ con piu uscite. Basta ridurre il corrispondente sistemaduale (raggiungibile) Σd in forma canonica di controllo multivariabile
Σ(can)d e costruire il duale di Σ
(can)d . La struttura della forma canon-
ica di osservabilita dipende dagli indici di Kronecker di osservabilita,che possono essere definiti sulla coppia osservabile (F, H) in completaanalogia agli invarianti di controllo considerati nei capitoli precedenti.
7.5 Decomposizione canonica
Consideriamo un sistema Σ = (F, G, H) e siano XR e Xno il sottospazioraggiungibile e quello non osservabile. Essi sono entrambi F -invarianti,quindi lo e anche la loro intersezione
X2 := XR ∩ Xno.
Detta B2 una base per X2, siano B1 e B4 due insiemi di vettori linearmenteindipendenti tali che B1 ∪ B2 sia una base per XR e B2 ∪ B4 sia una baseper Xno. Sia infine B3 un insieme di vettori linearmente indipendenti taleche la giustapposizione dei vettori di B1, B2, B3 e B4 sia una base per X.
Rispetto a tale base le matrici F, G, H assumono la forma
F =
F11 0 F13 0F21 F22 F23 F24
0 0 F33 00 0 F43 F44
, G =
G1
G2
00
,
H = [ H1 0 H3 0 ] (7.41)

7.5. DECOMPOSIZIONE CANONICA 23
Per ottenere la struttura delle (7.41) basta ricordare che
XR = span{B1,B2} e Xno = span{B2,B4}
sono F -invarianti, che Im G ⊆ XR e che ker H ⊇ Xno. Dalla struttura(7.41) si possono individuare i seguenti sottosistemi:
(F11, G1, H1) sottosistema raggiungibile e osservabile;
(F22, G2, 0 ) sottosistema raggiungibile e non osservabile
(F33, 0, H3) sottosistema non raggiungibile e osservabile
(F44, 0, 0 ) sottosistema non raggiungibile e non osservabile
che sono collegati fra loro secondo il seguente schema
G1k z−1
F11
6
Ovviamente, la matrice di trasferimento dipende solo dal sistema raggiun-gibile e osservabile:
W (z) = H(zI − F )−1G = H1(zI − F11)−1G1

24 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
7.6 Stimatori asintotici dello stato
Molte tecniche di controllo, fra le quali quella dell’allocazione degli auto-valori,richiedono di avere a disposizione ad ogni istante le variabili di stato.Spesso pero non e possibile, o non e conveniente, misurare tutte le variabilidi stato ma solo una parte di esse e quindi si dispone di un’informazioneparziale sulla dinamica interna del sistema. In queste condizioni, o si adot-tano delle strategie di controllo piu complicate, basate sull’elaborazionedinamica della parte di variabili di stato che si conoscono, oppure si cercadi costruire, a partire dalle misure, la parte mancante di informazione sullostato. Questo secondo modo di procedere si basa sull’introduzione di unsistema dinamico, detto stimatore, che, a partire dai dati disponibili, cal-cola il vettore di stato in modo approssimato. Cosı nell’implementazionedelle tecniche di controllo basate sulla retroazione dallo stato, viene usatolo stato approssimato elaborato dallo stimatore.
7.6.1 Stimatori di ordine intero
La forma piu semplice di stimatore e quella detta a catena aperta, costituitada una copia del sistema Σ = (F, G, H)
- (F, G) -u x y
-H
- (F,G) -x
Figura 1
Σ
Con riferimento ad un sistema discreto (il modo di procedere e del tuttoanalogo per un sistema continuo), l’equazione dello stimatore a catenaaperta e quindi
x(t + 1) = F x(t) + Gu(t) (7.42)
Definendo l’errore di stima al tempo t come
e(t) = x(t) − x(t), (7.43)

7.6. STIMATORI ASINTOTICI DELLO STATO 25
si ha
e(t + 1) = x(t + 1) − x(t + 1) = F (x(t) − x(t)) = Fe(t)
Quindi a partire da una stima x(0) dello stato iniziale x(0), cui corrispondeun errore di stima iniziale e(0) = x(0) − x(0), la dinamica dell’errore
e(t) = F te(0)
e determinata dagli autovalori di F . Cosi, ad esempio, se il sistema einstabile, l’errore di stima anziche convergere a zero al crescere di t, puo di-vergere. D’altra parte, anche se il sistema e asintoticamente stabile, puo nonessere possibile ottenere una convergenza sufficientemente rapida dell’errorea zero se il sistema non ha un margine di stabilita abbastanza consistente.
Nello stimatore a catena aperta non si tiene conto di uno dei dati che sihanno a disposizione e cioe dell’uscita y(·) di Σ. Questa viene utilizzatainvece nello schema di stimatore riportato in figura 2, per produrre unaspecie di retroazione dal confronto fra l’uscita Hx(t) del sistema Σ e lagrandezza Hx(t). Questo tipo di stimatore e detto appunto a catena chiusae di ordine intero (perche di dimensione uguale a quella di Σ).
- (F, G) -u(t) x(t)
H -y(t)
Σ
- G - k+ -x(t + 1)
z−1I -x(t)
H
k−+
?
F �
?
6
6
�L
AAAU
Figura 2

26 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Il blocco tratteggiato e un elemento statico caratterizzato da una matriceL, di dimensioni n × p, che possiamo scegliere ad arbitrio per agire sulladinamica dell’errore di stima. Le equazioni dello stimatore sono:
x(t + 1) = F x(t) + L(
Hx(t) − y(t))
+ Gu(t)
ovverox(t + 1) = (F + LH)x(t) − Ly(t) + Gu(t) (7.44)
e quindi l’errore di stima soddisfa l’equazione
e(t + 1) = x(t + 1) − x(t + 1)= (F + LH)x(t) − LHx(t) + Gu(t) − Fx(t) − Gu(t)= (F + LH)e(t) (7.45)
In questo caso, la dinamica dell’errore di stima e determinata dagli autoval-ori della matrice F + LH e possiamo influire sulla loro posizione nel pianocomplesso variando L. Di quanto si possano variare agendo sui valori di L
dipende dalle proprieta strutturali della coppia (F, H).
Piu specificamente, dato che
det(
zI − (F + LH))
= det(
zI − (F + LH))T
= det(
zI − (F T + HT LT ))
,
(7.46)al variare di L il polinomio caratteristico di F + LH puo essere variato adarbitrio fra i polinomi monici di grado n se e solo se la coppia (F T , HT ) eraggiungibile e quindi se e solo se la coppia (F, H) e osservabile. Una voltascelti gli autovalori di F + LH che si desiderano, nell’ipotesi che (F, H)sia osservabile la (7.46) suggerisce un procedimento per calcolare L. In-fatti si considera la coppia raggiungibile (F T , HT ) e, procedendo secondole tecniche indicate nei capitoli precedenti, si determina una matrice diretroazione K in modo da allocare gli autovalori di F T + HT K. Basterainfine porre L = KT .
Se (F, H) non e osservabile, la dinamica dell’errore caratterizzata da F +LH
ha alcuni modi fissi, che non possono essere influenzati dalla scelta di L.Come si puo facilmente verificare ponendo il sistema in forma standard diosservabilita, tali modi corrispondono agli autovalori del sottosistema nonosservabile di (F, H). Di conseguenza si puo costruire uno stimatore asin-totico se e solo se il sottosistema non osservabile e asintoticamente stabile.

7.6. STIMATORI ASINTOTICI DELLO STATO 27
E invalso l’uso di chiamare rivelabile 2 un sistema il cui sottosistema nonosservabile e asintoticamente stabile.
Esempio 7.7.1 Si consideri il sistema Σ = (F, G, H) di equazioni
x(t) =
0 1 00 −2 1−1 0 −1
x(t) +
001
u(t) = Fx(t) + gu(t)
y(t) = [ 1 0 0 ]x(t) = Hx(t)
Si vuole costruire uno stimatore asintotico avente autovalori eguali a -3. Seguendoquanto detto, poiche Σ e osservabile, il duale Σd = (FT , HT ,gT ) e raggiungibilee quindi esiste una matrice K tale che
∆F T +HT K(s) = (s + 3)3
Per calcolare K, si puo riferirsi alla forma canonica di raggiungibilita di Σd, datadalla coppia
(FT )c =
0 1 00 0 1−1 −2 −3
, (HT )c =
001
(7.47)
Denotando con Rd e con Rdc le matrici di raggiungibilita della coppia (FT , HT )e della coppia ((FT )c, (H
T )c), la matrice di cambiamento di base per ottenere laforma canonica di raggiungibilita e
T = RdR−1dc =
1 0 00 1 −20 0 1
2 3 13 1 01 0 0
=
2 3 11 1 01 0 0
La matrice Kc tale che
det(
sI − (FT )c − (HT )cKc
)
= (s + 3)3 = 27 + 27s + 9s2 + s3 (7.48)
si calcola immediatamente da (7.47) e (7.48):
Kc = [−26 −25 −6 ]
AlloraK = KcT
−1 = [−6 −7 −7 ]
e la matrice di retroazione tale che FT +HT K ha tutti gli autovalori eguali a -3 e
L = KT =
−6−7−7
e la matrice dello stimatore.
2in inglese “detectable”

28 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Nel caso di sistemi discreti, abbiamo visto che (F, H) e ricostruibile se esolo se (F T , HT ) e controllabile, e in questo caso e possibile allocare tuttigli autovalori di F + LH nell’origine ottenendo uno stimatore dead-beat, ilcui errore di stima che si annulla in un numero finito di passi.
• Esercizio 7.7.1 Si dimostri che per un sistema discreto Σ = (F, G, H) le seguentiproprieta sono equivalenti:
(i) Σ e ricostruibile
(ii) Il sottosistema non osservabile di Σ ha tutti autovalori nulli
(iii) Σ ammette uno stimatore dead-beat
(iv) La matrice
[F − zI
H
]
ha rango pieno per ogni valore non nullo di z ∈ C.
7.6.2 Stimatori di ordine ridotto
Gli stimatori di ordine intero, di cui abbiamo parlato finora, hanno un certogrado di ridondanza, dato che producono una stima di tutte le n variabili distato senza tenere conto che le uscite sono legate in modo istantaneo a questeultime attraverso delle combinazioni lineari con elementi della matrice H .L’idea che sta alla base della costruzione di stimatori di ordine ridottoconsiste nello sfruttare il legame esistente fra uscite e variabili di stato, inmodo da estrarre in “modo statico” dalle uscite la maggior informazionepossibile sullo stato, lasciando quindi ad uno stimatore, che e un sistemadinamico, il compito di fornire una stima del resto.
La parte statica del procedimento e immediata e si basa su un opportunocambiamento di base nello spazio X. Supponiamo che le p righe di H , ovverole p uscite del sistema, siano linearmente indipendenti. Cio corrisponde adassumere
rangoH = p
Se H non avesse rango di riga pieno, si puo considerare la matrice H ′, dirango pieno, che si ottiene estraendo da H un insieme massimale di righelinearmente indipendenti. Cosı facendo, le uscite che vengono escluse sonoquelle linearmente dipendenti dalle altre, che non forniscono quindi ulterioreinformazione sullo stato.
Costruiamo una matrice n × n di cambiamento di base T la cui inversa
T−1 =[
V
H
]} n − p
} p(7.49)

7.6. STIMATORI ASINTOTICI DELLO STATO 29
si ottiene scegliendo le n − p righe della sottomatrice V in modo che T sianon singolare. Rispetto alla nuova base, lo stato e rappresentato dal vettore
x = T−1x =[V x
Hx
]
=[w
y
]} n − p
} p(7.50)
Il cambiamento di base introdotto in X ha permesso di identificare le ul-time p variabili dello stato con le uscite, lasciando cos da stimare le n − p
componenti di w
Rispetto alla nuova base le matrici del sistema sono
A := T−1FT =[A11 A12
A21 A22
]
, B := T−1G =[B1
B2
]
, [ 0 Ip ] = HT
(7.51)e le equazioni di aggiornamento di stato possono essere scritte nella forma
w(t + 1) = A11w(t) + A12y(t) + B1u(t)y(t + 1) = A21w(t) + A22y(t) + B2u(t) (7.52)
Indichiamo con L un’opportuna matrice di dimensioni (n−p)×p e poniamo
v(t) := w(t) + Ly(t). (7.53)
Premoltiplicando in (7.52) la seconda equazione per L e sommandola allaprima otteniamo
v(t+1) = (A11 +LA21)w(t)+(A12+LA22)y(t)++(B1 +LB2)u(t); (7.54)
da cui, sommando e sottraendo a secondo membro in (7.54) il termine (A11+LA21)y si ricava l’equazione di aggiornamento di v(t)
v(t+1) = (A11+LA21)v(t)+(A12+LA22−A11L−LA21L)y(t)+(B1+LB2)u(t),(7.55)
ovvero l’equazione di un sistema con vettore di stato v di dimensione n−p.
Se coonsideriamo uno stimatore in catena aperta, di ordine n − p, per lostato del sistema (7.55)
v(t+1) = (A11+LA21)v(t)+(A12+LA22−A11L−LA21L)y(t)+(B1+LB2)u(t),(7.56)

30 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
l’errore di stima ev(t) = v(t) − v(t) soddisfa l’equazione
ev(t + 1) = v(t + 1) − v(t + 1) = (A11 + LA21)ev(t)
ed ha quindi una dinamica caratterizzata dagli autovalori di A11+LA21. Taliautovalori possono essere fissati arbitrariamente con una scelta opportunadi L se e solo se la coppia (A11, A21) e osservabile. E immediato verificareche se lo e la coppia (F, H) e osservabile, allora lo e anche (A11, A21). Infatti,l’osservabilita di (F, H) implica che abbia rango pieno per ogni z complessola matrice del criterio PBH di osservabilita
A11 − zIn−p A12
A21 A22 − zIp
0 Ip
(7.57)
Di conseguenza, sono linearmente indipendenti per ogni z le prime n − p
colonne di (7.57), ovvero ha rango pieno la matrice
[A11 − zIn−p
A21
]
(7.58)
e cio rappresenta la condizione di osservabilita della coppia (A11, A21).
Per ottenere una stima x(t) dello stato x(t) del sistema (F, G, H) si utilizzaquella di v(t):
1. assumendo come stima di w(t) il vettore w(t) = v(t)−Ly(t), l’erroredi stima su w vale
ew(t) := w(t) −w(t) = ev(t);
2. la stima ˆx(t) di x(t) e allora
[w(t)y(t)
]
,
cui corrisponde un errore
ex(t) :=[w(t)y(t)
]
−[w(t)y(t)
]
=[ev(t)
0
]
;

7.6. STIMATORI ASINTOTICI DELLO STATO 31
3. assumendo come stima di x(t) = T x(t) il vettore x(t) := T ˆx(t),l’errore e dato da
ex(t) := T(
ˆx(t) − x(t))
= Tex(t) = T
[ev
0
]
(7.59)
che converge a zero con la stessa rapidita di ev.
In fig. 3 e riportato lo schema a blocchi dello stimatore di ordine ridotto
-u(t)
Σ -y(t)
?
?
A12 + LA22 − A11L − LA21L
?
?
−L
- B1 + LB2- k+v(t + 1)
- z−1I -v(t) k+ -
w(t)
T -x(t)
A11 + LA21�
6
Figura 3• Esercizio 7.7.2 Si provi che se (7.58) ha rango pieno per ogni z ∈ C, allora
anche (7.57) ha rango pieno per ogni z ∈ C. Quindi l’osservabilita della coppia(F, G) e condizione necessaria e sufficiente per quella della coppia (A11, A21).
• Esercizio 7.7.3 Si supponga che nel sistema con m ingressi Σ = (F, G, H) lamatrice G abbia rango m.
(i) Si determini una matrice di un cambiamento di base nello spazio di stato tale
che T−1G =
[0
Im
]
.
(ii) Posto
T−1FT = A =
[A11 A12
A21 A22
]
, (7.60)
si verifichi che la coppia (F, G) e raggiungibile se e solo se lo e la coppia (A11, A12)
(iii) Gli autovalori di una matrice quadrata A, partizionata come in (7.60), pos-sono essere arbitrariamente allocati modificando i blocchi A21 e A22 se e solo se(A11, A12) sono una coppia raggiungibile.

32 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Esempio 7.7.2 Consideriamo il sistema dell’esempio 7.7.l. Poiche p = 1, epossibile costruire uno stimatore ridotto, di ordine n − p = 2, con entrambi gliautovalori eguali a -3. Si pone
T−1 =
0 0 10 1 01 0 0
ottenendo
A =
[A11 A12
A21 A22
]
=
−1 0 | −11 −2 | 0
−−− −−−−|−−−−0 1 | 0
, B =
[B1
B2
]
=
−10
−−−0
C = [ 0 0 | 1 ]
Il problema della costruzione dello stimatore si riduce a quello di determinare L
in modo che siadet(sI − A11 − LA21) = s2 + 6s + 9
ovvero
det([
s + 1 0−1 s + 2
]
−
[ℓ1
ℓ2
]
[ 0 1 ])
= s2 + 6s + 9
Risolvendo, si ottiene[
ℓ1
ℓ2
]
=
[−4−3
]
e lo schema dello stimatore e riportato in fig.4
-u(t)
Σ -y(t)
?
?[−17−11
]
?
?[43
]
-[10
]
- k+˙v(t) - ∫ -
v(t) k+ -w(t)
0 0 10 1 01 0 0
-
x(t)
[−1 −41 −5
]
�
6
Figura 4

7.7. SINTESI DEL REGOLATORE 33
7.7 Sintesi del regolatore
Esaminiamo ora le proprieta dinamiche di un sistema nel quale la legge dicontrollo u(t) = Kx(t) venga implementata utilizzando al posto di x(t) lastima x(t) fornita da uno stimatore.
In particolare, vogliamo vedere in quali termini e ancora risolvibile per ilsistema risultante il problema dell’allocazione degli autovalori e qual e lamatrice di trasferimento del sistema risultante.
Lo schema riportato in fig. 1 rappresenta il sistema globale ottenuto dallaconnessione del sistema dato Σ (l’impianto) con uno stimatore Σ di ordineintero e nel quale la reazione statica K sia effettuata dallo stato stimato.
Il sistema costituito dalla serie dello stimatore e dell’elemento statico K edetto regolatore.
-v(t) k+ - (F, G) -
u(t) x(t)H -
y(t)
Σ
x(t)
Regolatore
StimatoreK �
�
6
�
Figura 1
Facendo riferimento alla fig.2, e immediato constatare che il sistema globaleha come spazio di stato la somma diretta degli spazi di stato del sistemaΣ e dello stimatore, e verificare che la sua dinamica e rappresentata dalleequazioni
x(t + 1) = Fx(t) + Gu(t)
y(t) = Hx(t)
u(t) = v(t) + Kx(t)
x(t + 1) = F x(t) + Gu(t) + L(Hx(t) − y(t))

34 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
dalle quali, eliminando u(t), si ottiene
x(t + 1) = Fx(t) + GKx(t) + Gv(t)
x(t + 1) = −LHx(t) + (F + LH + GK)x(t) + Gv(t)
y(t) = Hx(t).
ovvero, in forma matriciale
x(t + 1)−−−−x(t + 1)
=
A︷ ︸︸ ︷
F | GK
−−− −|− −−−−−−−−−LH | F + LH + GK
x(t)−−−−x(t)
+
B︷ ︸︸ ︷
G
−−−G
v(t)
y(t) = [ H | 0 ]︸ ︷︷ ︸
C
x(t)−−−−x(t)

7.7. SINTESI DEL REGOLATORE 35
-v(t) k+ - (F, G) -
u(t) x(t)H -
y(t)
Σ
- G - k+ -x(t + 1)
z−1Ix(t)
H
k−+
?
F �
Σ
?
6
6
�L
AAAU
K �
6
Figura 2
Per rispondere al quesito che ci siamo posti inizialmente circa il sistemaΣg = (A, B, C) di dimensione 2n che abbiamo ottenuto, e necessario:
(i) calcolare il polinomio caratteristico della matrice A
(ii) calcolare il legame ingresso-uscita del sistema globale Σg
Sia per (i) che per (ii) conviene operare un cambiamento di base nello spaziodegli stati del sistema globale, caratterizzato dalla matrice
T =[In 0In In
]
,

36 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
ovvero assumere come stato del sistema globale il vettore
T−1[x(t)x(t)
]
=[
In 0−In In
] [x(t)x(t)
]
=[
x(t)x(t) − x(t)
]
=[x(t)e(t)
]
(7.61)
Il sistema Σg = (A, B, C) cui si perviene e algebricamente equivalente a Σg
ed ha matrici
A = T−1AT =[F + GK GK
0 F + LH
]
,
B = T−1B =[G
0
]
,
C = CT = [ H 0 ] (7.62)
E allora chiaro che il polinomio caratteristico di A, e quindi di A, e dato da
det(zI2n − A) = det[zIn − F − GK −GK
0 zIn − F − LH
]
= det(zIn − F − GK) det(zIn − F − LH) (7.63)
Questo risultato, che va sotto il nome di proprieta di separazione, mostrache, nella progettazione di un regolatore, possono essere effettuate in modoindipendente
la sintesi del blocco di reazione,ovvero l’allocazione degli autovaloridel sistema (F, G) per retroazione K dallo stato effettivo,
la sintesi dello stimatore (allocazione degli autovalori di F + LH conscelta opportuna di L).
Lo spettro del sistema globale, nel quale la retroazione si effettua dallo statostimato, altro non e che l’unione degli spettri di F + GK e di F + LH .
E chiaro allora che il problema della stabilizzazione dell’impianto Σ medi-ante un regolatore puo essere risolto se e solo se il sottosistema non raggiun-gibile e il sottosistema non osservabile di Σ sono entrambi asintoticamentestabili, ovvero se Σ e simultaneamente stabilizzabile e rivelabile.
Per quanto riguarda il calcolo della matrice di trasferimento di Σg , tenendoconto della struttura delle matrici in (7.62) otteniamo
Wg(z) = C(zIn − A)−1B

7.7. SINTESI DEL REGOLATORE 37
= [H 0 ][(zIn − F − GK)−1 ∗
0 (zIn − F − LH)−1
] [G
0
]
= H(zIn − F − GK)−1G,
La matrice di trasferimento che si ottiene e la stessa che si ha effettuandodirettamente la retroazione dallo stato x, nell’ipotesi in cui esso sia accessi-bile, senza interposizione dello stimatore. In altri termini, la presenza dellostimatore non si fa sentire sul legame ingresso/uscita (a stato iniziale nullo)del sistema globale.
Le proprieta del sistema complessivo che abbiamo illustrato, hanno un’interpretazioneimmediata sullo schema che rappresenta il sistema rispetto alla base carat-terizzata da T . Infatti rispetto a questa base il vettore di stato globale edato da (7.61) e le equazioni descrivono la dinamica di x(t) e di e(t)
x(t + 1) = (F + GK)x(t) + GKe(t)
e(t + 1) = (F + LH)e(t)
y(t) = Hx(t),
danno luogo allo schema di fig. 3.

38 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
-v(t) k+ - G - k+ - z−1I H- -
y(t)
�F + GK
6
e(t)z−1I
e(t + 1)
6
�K
F + LH �
-
Figura 3
Si vede chiaramente come il legame ingresso-uscita (a partire da stato in-iziale nullo) dipenda solo dal sottosistema ΣK = (F + GK, G, H). L’erroredi stima e(t) e generato da un sottosistema in evoluzione libera, che pro-duce un ulteriore ingresso Ke(t) per ΣK , dipendente dall’errore iniziale distima e tendente a zero se l’errore di stima tende a zero.
Esempio 7.8.1 (controllo della posizione di un’asta verticale). Un’asta dilunghezza ℓ e massa m e incernierata ad un carrello di massa M >> m il cuimovimento e comandato da una forza u(·).

7.7. SINTESI DEL REGOLATORE 39
-u
����
����
-
6
��s
������������
������������
������������
������������
?
mg
6-
H
V
φXXz
��
Figura 4
Le equazioni del sistema sono quelle di bilanciamento delle componenti orizzontalie verticali delle forze agenti. Trascuriamo i fenomeni di attrito e indichiamorispettivamente con H(·) e V (·) la forza orizzontale e quella verticale esercitatedal carrello sull’asta, con L la distanza del baricentro dell’asta dalla cerniera, econ J il momento di inerzia dell’asta rispetto al baricentro.
Il moto del baricentro e descritto dalle equazioni
H(t) = md2
dt2
(
s(t) + sin φ(t))
(7.64)
V (t) = md2
dt2
(
L cosφ(t))
(7.65)
e il moto di rotazione relativo al baricentro da
LV (t) sin φ(t) − LH(t) cosφ(t) = Jd2φ(t)
dt2(7.66)
Il moto del carrello e descritto dalla equazione
Ms..(t) = −H(t) + u(t)
che, trascurando la reazione dell’asta sul carrello, diviene
Ms..(t) = u(t) (7.67)
Eseguendo le derivate in (7.64) e (7.65) ed eliminando V (t) ed H(t), si pervieneall’equazione
(J + ML2)φ..− mgL sinφ + mLs
..cosφ = 0 (7.68)

40 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Introduciamo le variabili di stato
x1 = φ, x2 = φ
e utilizziamo la (7.67) per esprimere s..
. Otteniamo cosı il sistema non lineare
x1 = x2 := f1(x1, x2, u)
x2 =gML
J + ML2sinx1 −
mL
J + ML2u cosx1 := f2(x1, x2, u) (7.69)
Il sistema ottenuto linearizzando (7.69) nell’intorno del punto di equilibrio x1 =x2 = 0 per u(·) = 0 e
x =[ ∂fi
∂xj
]
x=0x + [ ∂fi
∂u]x=0 u =
[0 1gL′
0
]
x +
[0
− 1ML′
]
= Fx + gu (7.70)
dove si e posto
L′ :=(J + mL2)
mL.
Poiche, com’era da aspettarsi, il punto di equilibrio non e stabile, ci proponiamo distabilizzare il sistema (7.70) nell’intorno di tale punto supponendo che la grandezzamisurabile come uscita sia soltanto la posizione angolare dell’asta
y = [ 1 0 ]x = Hx.
Con una semplice reazione statica dall’uscita, non e possibile stabilizzare il sistema(7.70), dato che, per ogni K, F + gKH e del tipo
[0 1α 0
]
ed ha quindi almeno un autovalore con parte reale non negativa.
Poiche non e disponibile la misura della velocita angolare, per effettuare la stabiliz-zazione si ricorre alla costruzione di uno stimatore e quindi ad una reazione staticadello stato stimato. Sfruttando il teorema di separazione, si procede indipenden-temente alla costruzione dello stimatore, con dinamica dell’errore prefissata, esuccessivamente ad allocare gli autovalori del sistema reazionato, caratterizzatodalla matrice F + gK.
i) costruzione dello stimatore
Poiche (F, H) e osservabile, e possibile assegnare arbitrariamente gli autovalori diF + LH . Imponendo che la dinamica dell’errore tenda a zero come e−αt , bastascegliere L in modo che
det(sI − F − LH) = (s + α)2

7.7. SINTESI DEL REGOLATORE 41
Si ottiene
L =
[−2α
−α2 − gL′
]
(7.71)
ii) costruzione della retroazione statica dallo stato stimato
Poiche (F,g) e raggiungibile, e possibile assegnare arbitrariamentegli autovaloridi F + gK. Per imporre che il sistema che si ottiene sia stabile, con autovalori λ1
e λ2, si deve scegliere K in modo che
det(sI − F − gK) = (s − λ1)(s − λ2)
Si ottieneK = [ ML′λ1λ2 −ML′(λ1 + λ2) ] (7.72)
Osservazione Nell’esempio precedente, il regolatore non stabilizza soltantoil sistema linearizzato, ma, nell’intorno del punto di equilibrio, anche ilsistema non lineare.
Infatti, il sistema non lineare risultante dalla connessione del sistema nonlineare,(7.69), dello stimatore (7.71) e della reazione dallo stato stimato(7.72) ha equazioni del tipo
x(t) = f(x(t), u(t))
y(t) = Hx(t)˙x(t) = (F + LH)x(t) − Ly(t) + gu(t)
u(t) = Kx(t) + v(t)
ovverox(t) = f(x(t), Kx(t) + v(t)) (7.73)
˙x(t) = (F + LH)x(t) + gKx(t) + gv(t) − Ly(t) (7.74)
Linearizzando le equazioni (7.73) e (7.74) nell’intorno del punto x = x = 0,che e di equilibrio per v = 0, si ottiene il sistema
x(t) =[
∂f∂x
]
x(t) +[
∂f∂u
] [∂u∂x
]
x(t) +[
∂f∂u
] [∂u∂v
]
v(t)
= Fx(t) + gKx(t) + gv(t) (7.75)
˙x(t) = (F + LH + gK)x(t) − LHx(t) + gv(t) (7.76)

42 CAPITOLO 7. OSSERVABILITA E STIMA DELLO STATO
Tali equazioni coincidono con quelle del sistema globale ottenuto connet-tendo con il regolatore il sistema linearizzato (7.70). Poiche il sistema glob-ale e asintoticamente stabile, per il teorema di linearizzazione di Lyapunovpossiamo concludere che l’origine e punto di equilibrio asintoticamente sta-bile per il sistema non lineare (7.74).
Naturalmente, mentre il sistema linearizzato risulta globalmente stabile, lastabilita dell’origine nel sistema (7.74) e soltanto locale. Cio comporta che,se lo stato iniziale del sistema (7.69) e/o l’errore iniziale di stima non sonosufficientemente piccoli, lo stato del sistema (7.74) puo non convergere alpunto di equilibrio.
– Esercizio 7.8.1 Si verifichi che la proprieta di separazione rimane valida anchequando si costruisce un regolatore ricorrendo a uno stimatore di ordine ridotto(Sugg.: riferendosi per semplicita al sistema con matrici nella forma (7.51), siverifichi che w soddisfa l’equazione
w(t + 1) = (A11 + LA21)w(t) − LA21w(t) + A12y(t) + B1u(t).
Supponendo che u(t) sia somma di un ingresso esterno ξ(t) e di un termine diretroazione dallo stato stimato u(t) = K1w(t) + K2y(t) + ξ(t) e assumendo comevettore di stato del sistema complessivo
w(t)y(t)
w(t) − w(t)
:=
w(t)y(t)ew(t)
si verifichi che
A11 + B1K1 A12 + B1K2 −B1K1
A21 + B2K1 A22 + B2K2 −B2K1
0 0 A11 + LA21
e la matrice di aggiornamento di stato).
– Esercizio 7.8.2 Nel sistema di fig.1 si modifichi una connessione, supponendo diriportare in ingresso allo stimatore, anziche il vettore u(t), il termine di retroazioneKx(t). Si ottiene cosı il sistema di fig.5.
(i) Si verifichi che la matrice di aggiornamento di stato del nuovo sistema globalee la stessa del sistema globale considerato in fig.1.
(ii) Se il sistema Σ e stabilizzabile e rivelabile, allora esiste una retroazione di-namica dall’uscita che rende asintoticamente stabile il sistema risultante
(iii) Le matrici di trasferimento dei sistemi globali negli schemi di fig.1 e di fig. 5coincidono?

7.7. SINTESI DEL REGOLATORE 43
-v(t) k+ - (F, G) -
u(t) x(t)H -
y(t)
Σ
x(t)
Regolatore
StimatoreK �
���
6
�
Figura 5