-
Prof. dr. ing Cristian Negrescu
FILTRE OPTIME PENTRU ESTIMAREA LINIARA
A FORMEI SEMNALELOR STAIONARE
1.1 ESTIMAREA LINIAR A FORMEI UNUI SEMNAL
Se pune urmtoarea problem: fiind dat o pereche de semnale
discrete reale
sau complexe, aici notate cu d k i respectiv x k , s-ar putea
exprima fiecare eantion al primului printr-o combinaie liniar a
unui numr finit de eantioane succesive imediat anterioare din cel
de-al doilea semnal? Altfel spus, poate fi
considerat
1
*
0
MNot
k
k
d n y n w x n k
, (1.1)
n care k k kw a jb sunt constante ce urmeaz a fi determinate1,
drept un
bun estimat pentru y n . Aceast problem este cunoscut in
literatur sub numele de estimare liniar a formei semnalului
(waveform estimation). Pentru un ordin
M fixat, rezolvarea problemei const n determinarea constantelor
kw . Spunem
c estimarea s-a realizat optim dac aceste constante au fast ales
astfel nct s
minimizeze un criteriu de cost convenabil ales. n cele ce urmeaz
vom conveni ca d s fie numit semnal de referin (sau semnal dorit)
iar x s poarte numele de semnal de intrare. ntr-o abordare sistemic
(vezi Fig. 1.1.) semnalul d
1 Conjugarea constantelor
kw n relaia de mai sus este introdus din comoditi matematice
ulterioare
e intrare x este aplicat unui sistem discret liniar, cu
parametrii constani, de ordin finit (FIR) descris prin funcia
pondere (rspunsul la impuls)
1
*
0
M
k
k
h n w n k
. (1.2)
Ieirea sa
1
*
0
*M
k
k
y n x h n w x n k d n
, (1.3)
reprezint estimatul semnalului de referin.
1
-
1-2 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
1z x k
*
0w*
1w*
2w*
2Mw *
1Mw
d k
y k e k
Filtru discret
1z 1z
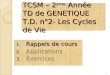
Fig. 1.1. Structura de baz pentru estimarea liniar a formei
Evaluarea calitii estimrii se face de regul prin intermediul
semnalului eroare definit ca
Def
e n d n y n d n d n . (1.4)
Totui, inspectarea direct a semnalului de eroare nu este
ntotdeauna suficient pentru a spune ct de bun este respectiva
estimare. Ceea ce putem ns
declara cu certitudine, este c atunci cnd, pentru n , 0e n ,
obinem
d n d n i vom spune c estimarea este perfect. Dificultile apar
cnd, din diverse motive, eroarea nu este identic nul (i de cele mai
multe ori aceasta este
situaia din practic). n consecin, pe baza semnalului de eroare e
n se va construi aa numita funcie de cost, iar criteriul de
optimizare va consta n minimizarea ei.
Notat cu J , funcia de cost este real (altfel nici nu s-ar putea
minimiza) i este
dependent (prin y n ) de cei M parametrii ( 0 1 1, ,... Mw w w )
ai estimatorului n acest moment, putem reformula exact, problema
estimrii liniare: s se
determine coeficienii optimi 0
kw astfel nct funcia de cost s devin minim
0 1 1
0 0 0
0 1 1 0 1 1 min, ...min , ... , ...
M
Not
M Mw w w
J w w w J w w w J
. (1.5)
Soluia optim pentru estimarea liniar a formei este prezentat n
Fig. 1.2.
1z x k
0*
0w0*
1w0*
2w0*
2Mw 0*
1Mw
0d k
0y k 0e k
Filtru discret
1z 1z
Fig. 1.2. Filtrul optim pentru estimarea liniar a formei
-
Tehnici de compresie a semnalelor multimedia 1-3
Prof. dr. ing Cristian Negrescu
Alegerea funciei de cost reale
: M MJ (1.6) este hotrtoare n asigurarea succesului
estimatorului construit pe baza ei. Funcia de cost trebuie s aib
sens, adic s aib o semnificaie fizic pentru utilizator permindu-i
acestuia s stabileasc o relaie monoton ntre valorile funciei de
cost i calitatea estimrii. Numai n acest caz el va percepe cea mi
bun estimare atunci cnd funcia de cost i va atinge minimul. Un al
doilea criteriu care se va dovedi important n alegerea funciei de
cost se refer la complexitate. n acest sens este de preferat
utilizarea unei funcii de cost care s permit determinarea facil a
setului
coeficienilor 0kw optimi.
Alegerea unei funciei de cost bune este o problem delicat i
impune ncadrarea semnalului de intrare i de referin ntr-o anumit
clas. Lund n considerare particularitile precum i experimentele
realizate, se pare c n prelucrarea semnalelor audibile funciile de
cost cu caracter energetic s-au dovedit a fi extrem de utile,
permind stabilirea unui bun echilibru ntre obinerea unui
estimator
de calitate i complexitatea (matematic) a calculului
coeficienilor 0w . n ceea ce
privete ncadrarea semnalelor de intrare ntr-o anumit clas
(specificarea unor proprieti ale acestora), ea este dependent
efectiv de contextul n care este utilizat estimarea liniar precum i
de modul n care sunt privite (modelate) semnalele. n cele ce urmeaz
ne vom ocupa n exclusivitate de rezolvarea a dou cazuri particulare
de estimare liniar a formei: filtrarea optimal MS i filtrarea
optimal LS.
1.2 FILTRAREA OPTIMAL MS. FILTRE WIENER
n cazul problemelor de filtrare optimal MS semnalul de intrare i
semnalul de referin sunt privite ca realizri ale unor procese
aleatore staionare, de medie nul i care vor avea anumite proprieti
statistice. Mai exact vom considera c exist un numr suficient de
mare de utilizatori care vor ncerca s estimeze fiecare n parte
cte
un semnal de referin d folosind pentru aceasta eantioanele cte
unui semnal de intrare x . Sarcina proiectantului va fi s furnizeze
un filtru de estimare suficient de bun pentru a putea fi folosit de
toi utilizatorii. Precizm faptul c toi utilizatorii vor
folosi acelai filtru, indiferent de perechea de semnale d , x cu
care opereaz. Pentru a nelege mai bine problema pus s presupunem c
dorim s realizm un astfel de filtru de estimare liniar a formei
care, inclus ntr-un sisteme de comunicaie telefonic, va opera cu
semnale vocale (s facem abstracie n acest moment de faptul c
semnalul vocal nu este staionar). Filtrul este construit de
productor i ulterior distribuit pe pia. Atragem aici atenia c n
momentul n care filtrul a fost proiectat, respectivul proiectant nu
are la dispoziie exact semnalele cu care va opera respectivul
sistem. Astfel el nu are de unde s tie cine va cumpra respectivul
produs i nici ce va avea de gnd s vorbeasc. Dispozitiv pe care l va
proiecta trebuie s fie suficient de bun pentru a putea fi folosit
de orice cumprtor (fiecare utilizator al sistemului va folosi
propriile semnale, necunoscute de proiectant). n aceste condiii cum
ar putea el s proiecteze filtrul optim?
-
1-4 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
Ideea de baz ar fi ca el s achiziioneze un numr suficient de
mare de mostre de semnal vocal, iar proiectarea s o fac nu pentru
un anumit semnal n parte ci
pentru o ntreag clas de semnale. n acest mod semnalele de
referin d i cele de intrare x pentru fiecare utilizator n parte vor
fi privite de proiectant ca realizri ale dou procese aleatoare
staionare i cu anumite caracteristici statistice. Deoarece filtrul
FIR optim va fi unic (acelai pentru toi utilizatorii,), devine
evident faptul c funcia de cost va trebui s fie construit folosind
o medie statistic a semnalelor eroare de la
toate perechile x , d pe care proiectantul le are la
dispoziie.
1.2.1 Organizarea semnalelor sub forma unui spaiu Hilbert
Din punct de vedere formal, un mare beneficiu se va obine prin
organizarea mulimii proceselor aleatoare staionare, de medie nul ca
spaiu unitar Hilbert. n
acest context fie dou astfel de procese x n i y n . Este uor de
verificat c funcionala biliniar hermitic (liniar pentru primul
argument i antiliniar pentru cele de al doilea), definit prin
*,Def
x y E x n y n , (1.7)
n care E reprezint operatorul de mediere statistic, satisface
proprietile unui produs scalar peste un spaiu complex. n consecin,
ptratul normei unui semnal devine
22 ,Def
x x x E x n (1.8)
i are semnificaie fizic de putere (statistic). S remarcm
posibilitatea interpretrii funciei de corelaie (statistice) ntre
dou semnale, cu ajutorul produsului scalar, ca
*, , ,Def
k kr k E x n k y n x y x y x y , (1.9)
n care Not Not
k kx n x n k T x n . (1.10)
n acest context problema filtrrii optimale MS este de fapt o
problem de
estimare liniar a formei (vezi Fig. 1.1.) n care se vor
considera semnalele x i d drept realizri ale unor procese aleatoare
staionare iar drept funcie de cost se va alege media (statistic)
ptratic (mean square MS) a erorii
2MS MSJ n E e n J ct (1.11) S remarcm c funcia de cost MSJ are
natur energetic (puterea statistic a
semnalului de eroare). n plus, datorit staionaritii semnalelor,
funcia de cost
2 2 ,Def
MSJ E e n e n e e . (1.12)
este independent de momentul de timp ales. Astfel realizm c
asigurarea (proiectarea) optimalitii MS la un moment dat este
suficient pentru asigurarea optimalitii MS la orice moment de
timp
Filtrul optim MS este cunoscut i sub numele de filtru Wiener.
Vom considera rezolvat problema proiectrii unui filtru Wiener
atunci cnd vom avea la
-
Tehnici de compresie a semnalelor multimedia 1-5
Prof. dr. ing Cristian Negrescu
ndemn o metod de determinare a coeficienilor optimi 0w din
structura prezentat
n Fig. 1.2.
1.2.2 Principul de ortogonalitate n contextul filtrelor optime
MS
n procesul de determinare a coeficienilor optimi este necesar
minimizarea
funciei de cost MSJ (1.12). Fiind astfel necesar rezolvarea unei
probleme de calcul
al unui extrem, este evident importana determinrii gradientului
funciei de cost MSJ
n funcie de coeficienii pondere k k kw a jb . Componentele
gradientul cutat sunt
MS MSk MSk k
J JJ j
a b
, 0, 1k M . (1.13)
Lund n considerare definiia funciei de cost precum i forma
explicit a erorii, dup un calcul simplu rezult pentru fiecare
component a gradientului expresia
2 ,k MS kJ x e 0, 1k M . (1.14)
Remarcm c n situaia n care filtrul utilizeaz setul de coeficieni
0
kw , secvena
particular de eroare rezultat este notat cu 0e (vezi Fig. 1.2.),
iar condiia de minim
pentru funcia de cost se traduce n anularea gradientului n acest
punct2, sau echivalent, la anularea tuturor componentelor sale.
Explicitnd se obine setul de relaii
0, 0kx e 0, 1k M , (1.15)
care reprezint formularea matematic a principiului de
ortogonalitate, unde
1
0 0 0*
0
MDef
k
k
e n d n y n d n w x n k
. (1.16)
reprezint semnalul eroare pentru filtrul optim MS (vezi Fig.
1.2.).
Fie ,x
n MF subspaiul liniar complex determinat de irul variabilelor
aleatoare
0, 1k M
x n k
. Principiul de ortogonalitate, unul din rezultatele de baz
din
teoria filtrrii optimale n sensul mediei ptratice a erorii poate
fi formulat prin:
Condiia necesar i suficient ca funcia de cost MSJ s-i ating
minimul pentru mulimea 0*kw este ca semnalul de eroare
corespunztor 0e n , pentru orice moment de timp n , s fie ortogonal
pe subspaiul liniar
,
x
n MF determinat de toate eantioanele intrrii pe baza crora se
realizeaz
estimarea curent.
2 n mod riguros, n punctual de minim trebuie satisfcute dou
condiii. Una dintre ele, caracteriznd proprietatea de extrem impune
anularea gradientului. Cea de a doua, specific tipul i eventual
unicitatea extremului. Pentru condiia de minim este necesar ca
Hesiana s fie o matrice pozitiv semidefinit (minim) sau pozitiv
definit (minim unic). Deoarece pentru filtrele optime n sens MS
(filtre Wiener), aa cum se da demonstra ulterior funcia de cost
este o form ptratic, cea de a doua condiie este automat
satisfcut
-
1-6 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
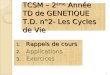
Acest principiu este reprezentat sugestiv n Fig. 1.3. unde
datorit limitrilor
de reprezentare grafic subspaiul ,x
n MF are o ilustrare planar.
F n, x N
d n 0e n
2x n
1x n x n
0 y n d n
Fig. 1.3. Principiul de ortogonalitate
O consecin a principiului de ortogonalitate ce-i va dovedi
ulterior importana deosebit se poate obine imediat. tiind c
estimatul semnalului de referin n cazul filtrului optim este
0 0Not
d n y n , (1.17)
se poate calcula
0 0 0* 0 0* 0*
0 0
, , 0N N
k k k k
k k
y e w x e w x e
(1.18)
de unde rezult:
Pentru un filtru optim MS semnalele de ieire 0y n (estimatul
semnalului dorit) i de eroare 0e n sunt ortogonale (vezi Fig.
1.3.).
1.2.3. Eroare medie ptratic minim. Eroarea medie ptratic minim
normat
Este evident c se dorete o eroarea medie ptratic (funcia de
cost) ct mai mic, ceea ce ar avea ca efect o estimare mai bun a
semnalului de referin. ntruct
2
0
minJ e n . (1.19)
folosind (1.16) i (1.18) el poate fi exprimat prin
22 0 2 2
min d dJ d n y n (1.20)
unde 2
d i 2
d reprezint puterea semnalului de referin i respectiv
puterea
semnalului la ieirea filtrului optim.3 Acest rezultat nu
reprezint altceva dect teorema lui Pitagora n spaiul unitar
al semnalelor. (vezi Fig. 1.3.) i subliniaz faptul c estimatul d
n reprezint
3 n determinarea relaiei anterioare s-a inut cont de faptul c
semnalele sunt cu medie nul.
-
Tehnici de compresie a semnalelor multimedia 1-7
Prof. dr. ing Cristian Negrescu
proiecia semnalului de referin d n pe subspaiul liniar ,x
n MF generat de cele M
eantioane ale semnalului de intrare. O msur a calitii estimrii
se poate obine prin normarea erorii medii
ptratice minime. Se definete astfel eroarea medie ptratic normat
prin
2
min
2 21 0, 1
Defd
d d
J
. (1.21)
Se observ ca depinde numai de statistica de ordin 2 a semnalului
de referin i a celui estimat (la ieirea filtrului). Valori mici
pentru (ctre 0) semnific o adaptare foarte bun a filtrului
(estimarea semnalului dorit se face aproape perfect), iar pe de alt
parte, valori mari ale lui indic o slab adaptare a filtrului la
semnal.
1.2.4 Proiectarea filtrului optim MS. Sistemul de ecuaii Wiener
Hopf
Condiia de filtru optim MS este echivalent cu respectarea
principiului de ortogonalitate. Exist posibilitatea de a se
reformula condiia de optim n termeni ai unor funcii de corelaie ai
semnalului de intrare i de referin. Pentru acesta pornind de la
(1.15), prin explicitarea semnalului de eroare se obine
1
0 0*
0
, 0 ,M
k k i i
i
x e x d w x
(1.22)
sau, echivalent 1
0
0
, ,M
i k i k
i
w x x x d
(1.23)
Dar ,Not
k ix x r i k r i k xx (1.24)
reprezint funcia de autocorelaie pentru semnalul de intrare, de
argument i k , iar
,Not
kx d r k p k xd (1.25)
reprezint funcia de intercorelaie a semnalului de intrare cu cel
de referin4. Prin folosirea notaiilor (1.24) i (1.25) n (1.23) se
obine sistemul de ecuaii Wiener - Hopf:
1
0
0
M
i
i
w r i k p k
, pentru 0, 1k M (1.26)
Aadar sistemul de ecuaii Wiener - Hopf stabilete legtura ntre
coeficienii filtrului optim i dou funcii de corelaie, mai precis,
autocorelaia semnalului de intrare respectiv intercorelaia ntre
semnalul de intrare i cel de referin.
Datorit modului compact de scriere se va dovedi benefic
utilizarea unui formalism matriceal i a notaiilor urmtoare:
Vectorul semnalului de intrare
. . 1Def
T
n x n x n M X ; (1.27)
4 Ultimele dou relaii folosesc implicit staionaritatea
mediului
-
1-8 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
Vectorul pondere al filtrului
0 1. .Def
T
Mw w W ; (1.28)
Matricea de autocorelaie a semnalului de intrare
, 0, 1
Def NotH
i j i j ME n n r
R X X , (1.29)
unde *,Def Not
i j i jr x x E x n i x n j r j i . (1.30)
ntr-o scriere explicit R devine
0 1 .. 2 1
1 0 .. 3 2
. . .. . .
. . .. . .
2 3 .. 0 1
1 2 .. 1 0
r r r M r M
r r r M r M
r M r M r r
r M r M r r
R (1.31)
Matricea de intercorelaie ntre semnalul de intrare i cel de
referin
*
0 1. .
0 . . 1
Not Not
M
T
E n d n p p
p p M
TP X
, (1.32)
n care *,ip i x d E x n i d n . (1.33)
Utiliznd acest formalism, semnalul de la ieirea filtrului
discret din Fig. 1.1. poate fi scris ca
1
* *
0
MH T
k
k
y n w x n k n n
W X X W , 0n . (1.34)
Notm cu 0*kw , 0, 1k M irul coeficienilor funciei pondere pentru
filtrul Wiener. Ei asigur minimizarea funciei de cost (1.12).
Utiliznd acest set de coeficieni se obine:
Ieirea filtrului optim (ieirea filtrului Wiener)
1
0 0* 0 0*
0
MH T
k
k
y n w x n k n
W X X W , (1.35)
n care0W 0 00 1. . Mw w
T
este vectorul pondere optim. (1.36)
Cu ajutorul notaiilor de mai sus este posibil rescrierea compact
a setului de ecuaii (1.26), obinndu-se pentru sistemul de ecuaii
Wiener-Hopf forma matricial
0 R W P . (1.37)
-
Tehnici de compresie a semnalelor multimedia 1-9
Prof. dr. ing Cristian Negrescu
Matricea R are o serie de proprieti remarcabile, dintre care
remarcm faptul c n marea majoritate a cazurilor este nesingular,
permind astfel determinarea soluiei optime
0 1 W R P . (1.38)
n concluzie rezolvarea problemei optime MS necesit cunoaterea
statisticii
semnalelor de intrare i de referin, mai precis, a matricilor R i
P . Construcia matricilor R i P necesit numai primele M eantioane
ale funciei de autocorelaie pentru semnalul de intrare i respectiv
ale funciei de intercorelaie ntre semnalul de intrare i de
referin.
1.2.5 Comentarii privind utilitatea soluiei Wiener
Revenind acum la exemplul de la nceputul paragrafului 1.2, tim
exact ce trebuie s fac proiectantul estimatorului optimal. Dup ce
va achiziiona un numr
respectabil de mostre posibile pentru semnalele d i x ,
alegndu-i n prealabil ordinul M al filtrului, el va calcula M
valori ale funciei de autocorelaie pentru
semnalul de intrare ( 0 , 1 ,... 1r r r M cu ajutorul crora va
construi matricea R de autocorelaie. Va calcula i M valori ale
funciei de intercorelaie ntre
semnalul de intrare i cel de referin ( 0 , 1 , ..., 1p p p M cu
ajutorul cruia va forma matricea de intercorelaie P . Inversnd
matricea de autocorelaie i
efectund nmulirea (1.38) el va obine coeficienii 0W pentru
filtrului optim pe care
l caut. S observm c acest filtru nu este optimizat pentru o
realizare anume a
proceselor x i d , ci va fi valabil pentru toate seturile de
semnale care au aceleai funcii de autocorelaie i respectiv de
intercorelaie cu cele implicate n faza de proiectare.
Ce ne asigur proiectantul filtrului Wiener?
El susine c dac se folosete setul de coeficieni 0W , la un
moment dat (i
datorit staionaritii se poate generaliza pentru orice moment de
timp) puterea semnalului de eroare, obinut prin medierea statistic
a eantioanelor curente de
eroare pentru toi utilizatorii (aceasta este semnificaia funciei
de cost MSJ ) este cea
mai mic posibil, fr a putea ns preciza exact care sunt valorile
semnalului eroare pentru fiecare utilizator n parte.
Este acceptabil o astfel de situaie? Se pare c da. Mai nti s ne
amintim c operarea se face n medii staionare
(semnalele nu-i schimb caracteristicile), altfel ntregul eafodaj
pe care l-am construit nu are nici un sens deoarece, odat cu
schimbarea caracteristicilor semnalului, ar trebui reproiectat i
filtrul de estimare. Dac semnalele au funcii de autocorelaie care
tind la zero (cnd argumentul autocorelaiei tinde ctre infinit)
atunci este de ateptat s fie valabil ergodicitatea. Conform
acesteia, mediile statistice (la orice moment de timp) sunt egale
cu media temporal i ca urmare atunci cnd puterea statistic a
semnalului eroare este mic, eventual zero (Wiener ne
asigur c dac se folosesc coeficienii 0W atunci se obine minimul)
i puterea
calculat prin mediere temporal pentru fiecare semnal eroare n
parte (aceea
-
1-10 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
msurabil cu un watmetru) s aib aceeai valoare mic, eventual
zero. Vedem astfel c ergodicitatea este cea care ne permite s
proiectm sisteme folosind medii statistice i s le utilizm efectund
medii temporale.
1.2.6 Funcia de cost. Suprafaa de cost. Forma canonic a
suprafeei de cost
Ar fi interesant de fcut unele comentarii relativ la ct de bun
este filtrul Wiener pe care l proiectm. ntruct calitatea estimrii
liniare a formei semnalului o
msurm prin intermediul funciei de cost MSJ (puterea semnalului
de eroare), n mod
cert ne-ar place s tim, nc din faza de proiectare, care va fi
valoare minim minJ a
acesteia. n acest mod putem avea o idee relativ la ct de bine
ne-ar putea rezolva problema filtrul optim Wiener chiar nainte ca
respectivul filtru s fie efectiv utilizat de beneficiar.
Un alt aspect se refer la faptul c, de cele mai multe ori,
determinarea soluiei optime direct din ecuaia matricial (1.38) nu
este convenabil n special din dou
motive. Primul este volumul mare de calcul necesar inversrii
matricei R . Cel de-al doilea motiv se refer la situaia n care
matricea R este singular, caz n care inversarea ei este imposibil.
Aici este chiar interesant deoarece singularitatea matricei
R ne spune c soluie optim exist, dar nu este unic. Exist mai
multe soluii bune
(pentru care funcia de cost MSJ este minim) dar ele nu pot fi
obinute aplicnd
(1.38)!. Pentru a depi aceste dou probleme este necesar s se
dezvolte alte metode, chiar i aproximative, de determinarea a
optimului. Un al treilea motiv se refer la faptul c n implementrile
numerice reprezentarea se face cu precizie finit i astfel
chiar dac determinarea soluiei optime Wiener (0W ) se face cu
precizie suficient de
ridicat, limitrile impuse de eficiena comunicaiei sau de
complexitatea sistemului
conduc la utilizarea unor valori cuantizate pentru coeficienii 0
0 0
0 1 1, , ... , Mw w w .
n consecin, utilizarea unor valori aproximative pentru
coeficienii filtrului optim pare greu de evitat i astfel este de
ateptat ca, n realitate, operarea s nu se fac
n punctul optim 0W . Efectul imediat va fi o cretere a funciei
de cost (creterea
costului estimrii). Se ridic atunci urmtoarele ntrebri legitime:
Ct de mare este creterea funciei de cost ntr-o vecintate a
punctului de optim. Este acceptabil aceast cretere? Mai mult, ne-ar
place s tim, nc din faza de proiectare, care va fi
valoare minim a funciei de cost ( minJ ). n acest mod putem avea
o idee relativ la ct
de bine ne-ar putea rezolv problema filtrul optim Wiener Un
rspuns la aceste ntrebri l-am avea dac am ti cum arat funcie de
cost,
cel puin n jurul punctului de optim. Dac n aceast vecintate vom
constata creteri rapide, atunci mici abateri de la valorile optime
ale coeficienilor filtrului se vor traduce prin creteri accentuate
n funcia de cost, sau echivalent, prin creteri semnificative ale
puterii semnalului de eroare. O astfel de funcie de cost nu este
suficient de bun. Putem nelege acum c alegerea funciei de cost este
un proces delicat, care implic aspecte multiple.
-
Tehnici de compresie a semnalelor multimedia 1-11
Prof. dr. ing Cristian Negrescu
Pentru a pune n eviden aceste fenomene se va determina funcia de
cost
pentru un set oarecare W de coeficieni. Folosind (1.34), (1.12)
putem explicita funcia de cost prin
2 ,
, , , , .
MSJ E e n d y d y
d d y y d y y d
(1.39)
Dar 2, dd d , (1.40)
, ,y y H H HW X X W W R W , (1.41)
i
, , 2 Re ,
2 Re , 2 Re .
d y y d y d
d
H HW X W P (1.42)
In acest caz (1.39) devine
2 2 2 ReH HMS dJ E e n W R W W P . (1.43) n punctul optim (
0W ) calculul funciei de cost conduce la
02 0 2 1
min
H H
MS d dJ J
W WP W P R P . (1.44)
Remarcm nc odat c minJ este funcie numai de statisticile
semnalului de intrare i
de referin. Relaia anterioar este cea care ne permite s
determinm performana filtrului optim nainte ca acesta s realizeze
propriu-zis filtrarea. Astfel, proiectantul poate monitoriza prin
(1.44) calitatea estimatorului i dac este nemulumit, poate modifica
parametrii de proiectare (n cazul de fa singura posibilitate pe
care o are la
dispoziie ar fi creterea ordinului M pentru filtru).
Explicitnd 2
d din (1.44) i introducnd rezultatul n (1.43) se obine
relaia
important
0 0minH
MSJ J W W R W W . (1.45)
Notm cu
0
Def
V W W , (1.46)
diferena ntre vectorul coeficienilor i soluia optim Wiener.
Atunci (1.45) capt o form mai simpl, devenind
min
H
MSJ J V R V . (1.47)
Suprafaa pe care o descrie minMSJ J ca funcie de ponderile W
ale
filtrului, ntr-un spaiu cu 2 1M dimensiuni reale, se numete
suprafa de cost. Este evident c proprietile suprafeei de cost sunt
strns legate de matricea de
autocorelaie. ntruct R este o matrice hermitic suprafaa de cost
este o form
ptratic real. Mai mult, deoarece R este n marea majoritate a
cazurilor o matrice
pozitiv definit i forma ptratic H V R V va fi pozitiv definit
ceea ce va
determina ca suprafaa de cost s aib un minim unic i distinct
care este atins numai
cnd V 0 , sau echivalent, cnd 0W W .
-
1-12 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
n acest mod orice abatere de la soluia optim Wiener este imediat
penalizat
printr-o cretere a funciei de cost. Acum se explic de ce 0MSJ W
W s-a notat cu
minJ . Problema determinrii optimului se reduce astfel la gsirea
coordonatelor
punctului de minim al suprafeei de cost. Este remarcabil de
observat c forma i plasarea suprafeei de cost sunt determinate
numai de semnalul de intrare nu i de semnalul de referin.
Contribuia acestuia din urm se reflect numai n termenul
minJ .
1.3 FILTRAREA OPTIMAL LS
Filtrarea optimal LS (Least Squares) este tot un caz particular
al estimrii liniare a formei unui semnal i reprezint o alternativ
de succes pentru filtrele Wiener.
Spre deosebire de acestea din urm a cror teorie are ca element
central conceptul de mediere statistic, filtrele LS se dezvolt n
jurul ideii de mediere n domeniul timp, fr a implica astfel
cunotine despre statistica semnalelor aplicate la intrare.
Fie de data aceasta spaiul semnalelor discrete de medie nul i
suport
considerat mrginit ( 0, 1n L ) organizat tot ca spaiu Hilbert
dar a crui metric
este bazat acum pe produsul scalar definit ca
2
1
*, ,nDef Not
LS
k n
x y x n y n x y
, (1.48)
unde valorile 1n i 2n sunt constante i alese astfel nct s
defineasc, pe de o parte,
domeniul temporal pentru care se face optimizarea, iar pe de alt
parte, s permit accesarea tuturor eantioanelor semnalelor necesare
calculului produsului scalar. n acest spaiu, norma unui semnal are
semnificaie fizic de energie i se calculeaz prin
2
1
22 2,
nDef Not
LSLSn n
x x x x n x
(1.49)
Problema filtrrii optimale LS este tot o problem de estimare
liniar a
formei (vezi figura Fig. 1.1.) n care se vor considera semnalele
x i d pe domeniul
temporal de interes ( 0, 1n L ) iar drept funcie de cost se va
alege energia erorii
(suma ptratelor eantioanelor erorii)
2
1
2 2
,n
LS LSLSn n
J e n e n e e
. (1.50)
Minimizarea acestei energii conduce la obinerea sumei celor mai
mici ptrate ale eantioanelor erorii ceea ce justific denumirea de
filtrare optimal LS (least squares LS). i de aceast dat, ne vom
considera satisfcui n ceea ce privete rezolvarea problemei atunci
cnd vom gsi o metod de determinare a coeficienilor
optimi 0w (vezi Fig. 1.2.) care s asigure minimizarea funciei de
cost (1.50), adic
-
Tehnici de compresie a semnalelor multimedia 1-13
Prof. dr. ing Cristian Negrescu
0 1 1
0 0 0
0 1 1 0 1 1 min, ...min , ... , ...
M
Not
LS M LS M LSw w w
J w w w J w w w J
(1.51)
S remarcm c minimizarea energiei erorii este echivalent cu
minimizarea
puterii semnalului de eroare deoarece intervalul de mediere 1
2,n n este constant. ntr-
adevr
2
1
2
2 1 2 1
1 1n
e LS
n n
P e n Jn n n n
, (1.52)
iar minimizarea funciei de cost LSJ va conduce la obinerea unei
valori minime
pentru eP .
ntruct formulat astfel, din punct de vedere formal problema
optimizrii LS este identic cu problema Wiener, astfel ne ateptm ca
i de aceast dat s fie valabil principiul de ortogonalitate
0, 0k LSx e 0, 1k M , (1.53)
i de aici
0 0, 0LSy e (1.54)
ceea ce ne va conduce la un sistem de ecuaii similar cu sistemul
de ecuaii Wiener Hopf
0
LS LS R W P . (1.55)
unde
, 0, 1
,Def Not
H
LS LS i j i j MLSn n r
R X X , (1.56)
n care 2
1
*
, , ,nDef Not
LS i j i j LS
n n
r x x x n i x n j r i j
. (1.57)
Matricea LSR poart numele de matrice de autocorelaie (temporal)
a
semnalului de intrare (remarcm din (1.57) legtura ntre
elementele matricei LSR i
funcia de autocorelaie temporal) i ntr-o scriere explicit
devine
0,0 1,0 .. 2,0 1,0
0,1 1,1 .. 2,1 1,1
. . .. . .
. . .. . .
0, 2 1, 2 .. 2, 2 1, 2
0, 1 1, 1 .. 2, 1 1, 1
LS
r r r M r M
r r r M r M
r M r M r M M r M M
r M r M r M M r M M
R (1.58)
n ceea ce privete matricea de intercorelaie LSP ea se calculeaz
prin
2
1
* 0,0 . . 1,0n Not T
LS
n n
n d n p p M
P X , (1.59)
-
1-14 Filtre optime pentru estimarea liniar a formei semnalelor
staionare
Prof. dr. ing Cristian Negrescu
n care 2
1
*,0 ,n
i LS
n n
p i x d x n i d n
. (1.60)
n cazul n care matricea LSR este nesingular se poate obine
soluia optim
LS
0 1
LS LS
W R P . (1.61)