Embed Size (px)
Citation preview
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
CAPITULO 9: RESPUESTA EN FRECUENCIA
Los tres objetivos principales del análisis de sistemas de control con retroalimentación son la determinación de las siguientes características del sistema:
1.- El grado o alcance de la estabilidad del sistema. 2.- La respuesta en estado estable. 3.- la respuesta en estado transitoria. Existen cuatro métodos gráficos para el análisis de sistemas de control, los cuales son más simples y directos que los métodos en el dominio del tiempo para modelos lineales prácticos de sistemas de control con retroalimentación ellos son: 1.- El método del lugar de las raíces. 2.- Representaciones de diagramas de Bode. 3.- Diagramas de Nyquist. 4.- Cartas de Nichols. Los tres últimos son técnicas en el dominio de la frecuencia. 9.1 Método Del Grafico De Bode El método más usado a nivel industrial para el análisis de estabilidad es el método del gráfico de Bode. El método del gráfico de Bode consta de dos gráficos:
- Gráfico de magnitud. - Gráfico de de fase.
Existen tres formas de determinarlas
1) Método práctico. 2) Método teórico. 3) Método asintótico.
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
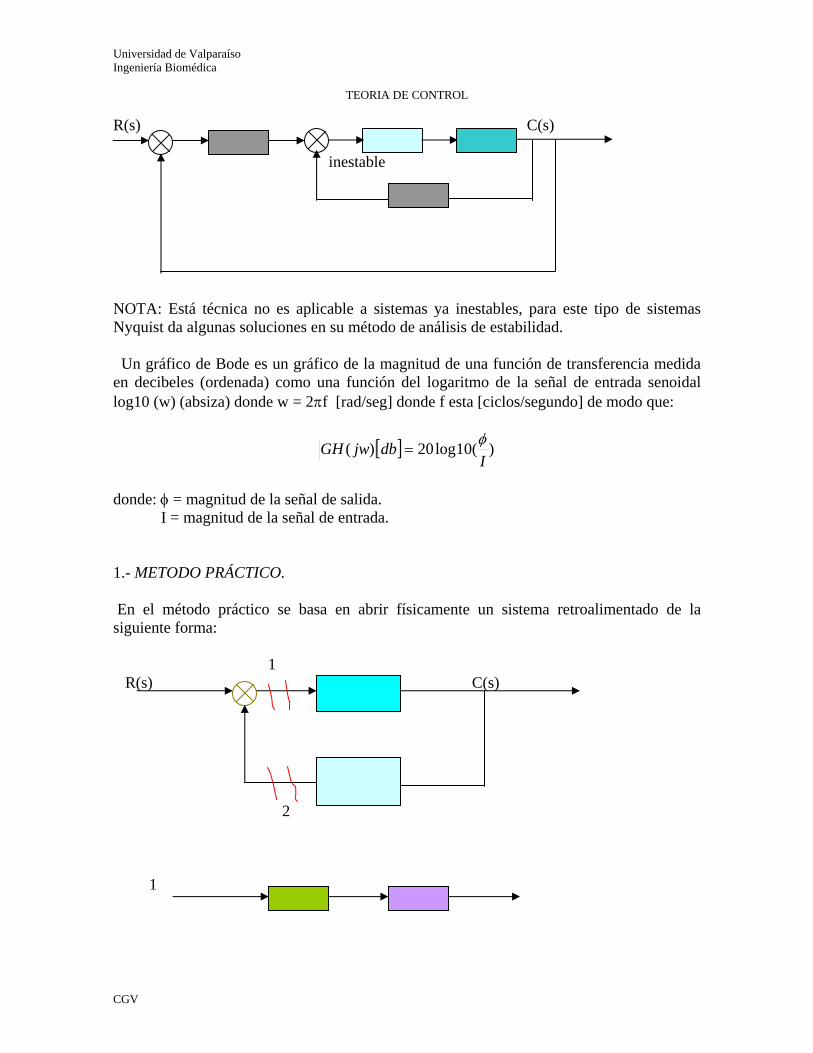
R(s) C(s) inestable
NOTA: Está técnica no es aplicable a sistemas ya inestables, para este tipo de sistemas Nyquist da algunas soluciones en su método de análisis de estabilidad. Un gráfico de Bode es un gráfico de la magnitud de una función de transferencia medida en decibeles (ordenada) como una función del logaritmo de la señal de entrada senoidal log10 (w) (absiza) donde w = 2πf [rad/seg] donde f esta [ciclos/segundo] de modo que:
[ ] )(10log20)(I
dbjwGH φ=
donde: φ = magnitud de la señal de salida. I = magnitud de la señal de entrada. 1.- METODO PRÁCTICO. En el método práctico se basa en abrir físicamente un sistema retroalimentado de la siguiente forma: 1 R(s) C(s) 2 1
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
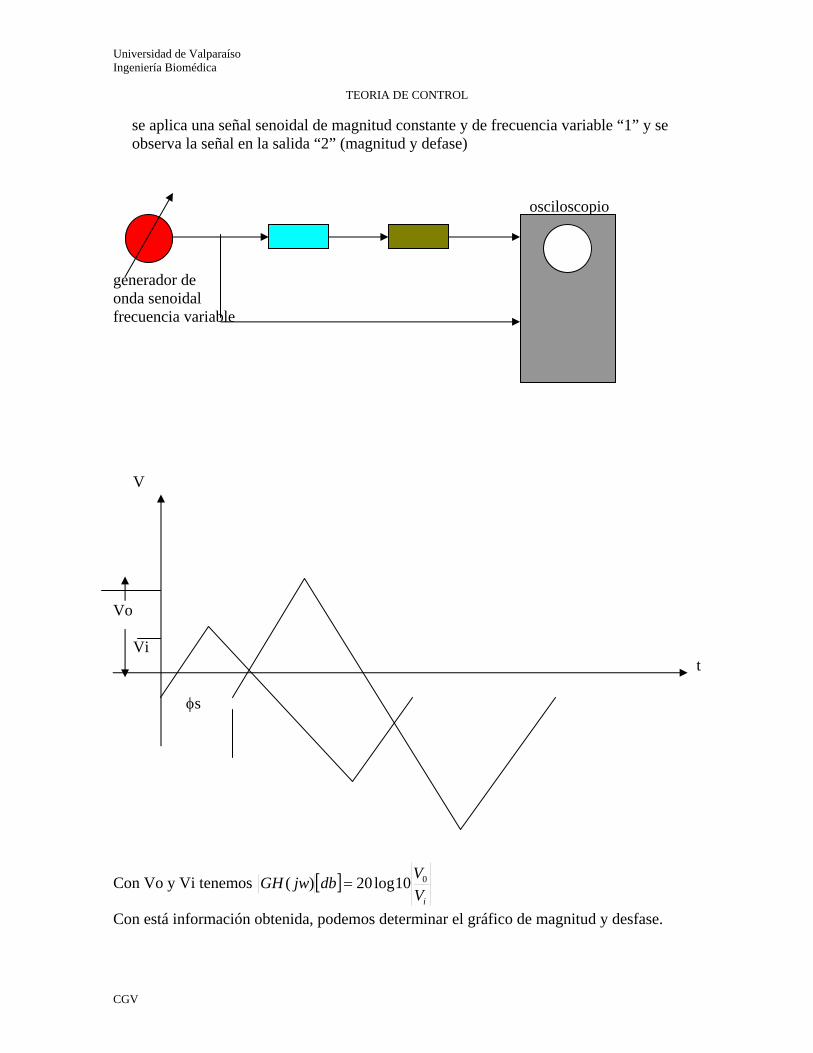
se aplica una señal senoidal de magnitud constante y de frecuencia variable “1” y se observa la señal en la salida “2” (magnitud y defase)
osciloscopio
generador de onda senoidal frecuencia variable
V Vo Vi t φs
Con Vo y Vi tenemos [ ]iV
VdbjwGH 010log20)( =
Con está información obtenida, podemos determinar el gráfico de magnitud y desfase.
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
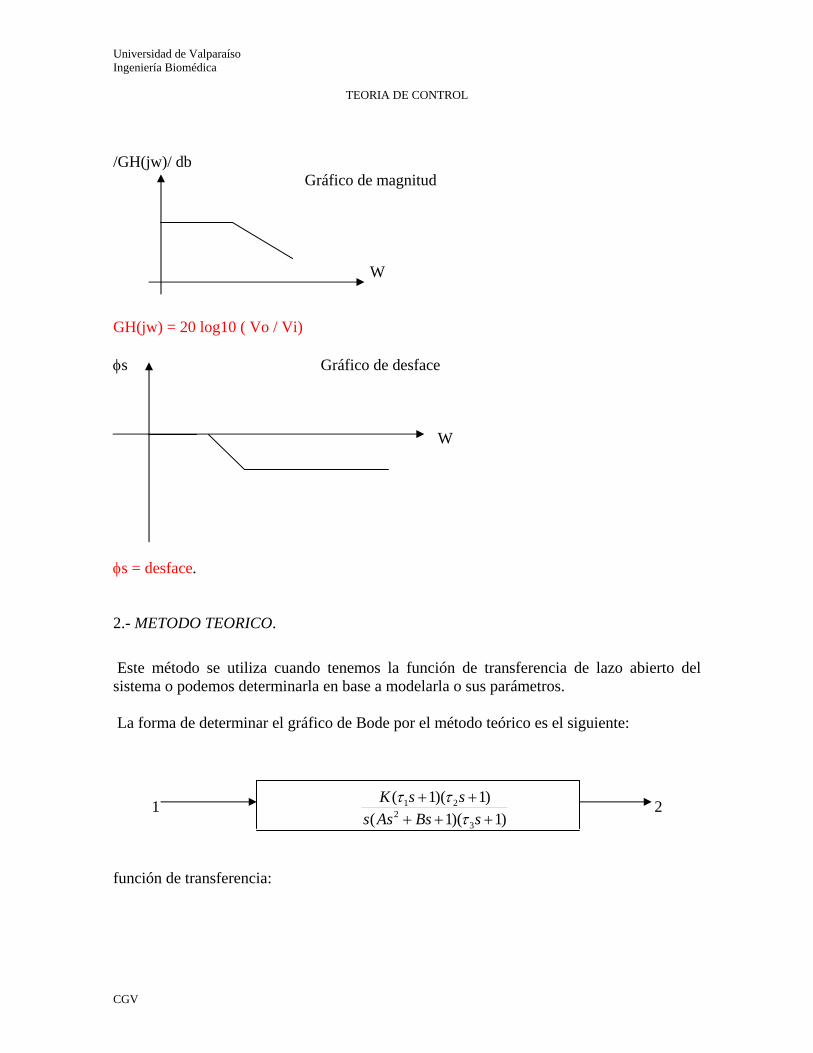
/GH(jw)/ db Gráfico de magnitud W GH(jw) = 20 log10 ( Vo / Vi) φs Gráfico de desface W φs = desface. 2.- METODO TEORICO.
Este método se utiliza cuando tenemos la función de transferencia de lazo abierto del sistema o podemos determinarla en base a modelarla o sus parámetros. La forma de determinar el gráfico de Bode por el método teórico es el siguiente:
1 )1)(1(
)1)(1(
32
21
+++++sBsAss
ssKτ
ττ 2
función de transferencia:
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
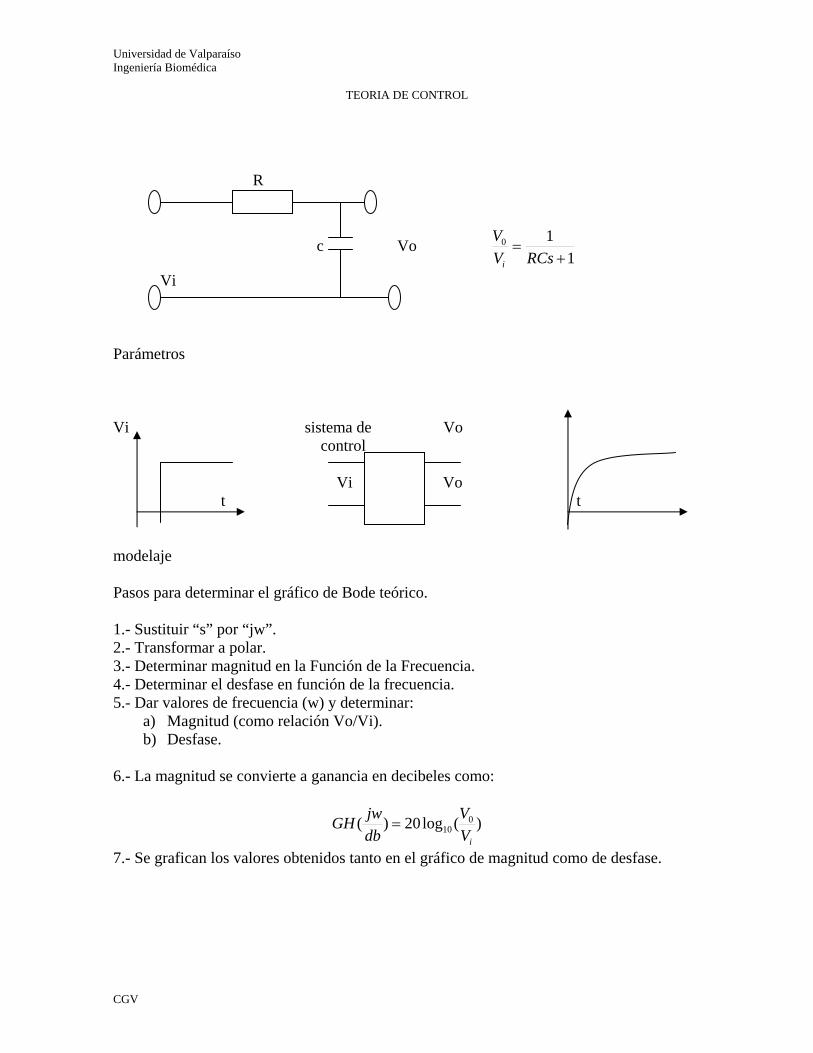
R
c Vo 1
10
+=
RCsVV
i
Vi Parámetros Vi sistema de Vo control Vi Vo t t modelaje Pasos para determinar el gráfico de Bode teórico. 1.- Sustituir “s” por “jw”. 2.- Transformar a polar. 3.- Determinar magnitud en la Función de la Frecuencia. 4.- Determinar el desfase en función de la frecuencia. 5.- Dar valores de frecuencia (w) y determinar:
a) Magnitud (como relación Vo/Vi). b) Desfase.
6.- La magnitud se convierte a ganancia en decibeles como:
)(log20)( 010
iVV
dbjwGH =
7.- Se grafican los valores obtenidos tanto en el gráfico de magnitud como de desfase.

Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
Por ejemplo si:
)1)(1()1)(1(
32
21
+++++sBsAss
ssKτ
ττ
)1)(1()1()( 22
2
1
++++
=BjwwAjjwjw
jwkjwGHτ
τ
Transformar a polar ))1)((1(
)1()(222222
2
1
wBwAwwjwkjwGH
+−++
=τ
τ
φs = -90 + tg wτ - tg w 2τ – tg( Bw/1-Aw²) dar valores a w y determinar
/GH(jw)/db = 20 10log /GH(jw)/ Realizar un tabulado y pasarlo al gráfico de magnitud y desfase. Im E= K5+jK6 = (K5² + K6²) θ = tg K6 / K5 K6 K5 Re “j” es un vector unitario que rota cualquier vector 90 con el plano complejo. Algunas observaciones sobre el la aplicación del método teórico de Bode. 1.- Justificación del método asintótico de Bode. 2.- Cuando tenemos factores cuadráticos con coeficientes de amortiguamiento menores o iguales a 0.5 3.- Cuando se utiliza algún algoritmo computacional (programable). θ = wt= diferencia entre ángulo geométrico y trigonométrico ó una medida de cierto defasamiento a una frecuencia dada.

Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
3.- METODO ASINTOTICO. El aspecto de que el gráfico de Bode tenga ejes coordenados logarítmicos y que la ganancia se maneje en decibeles hace que se observen algunas características consistentes en la construcción de estás así:
a) Como en el gráfico de magnitud, en la ordenada, graficamos la ganancia en db o sea:
/GH(jw)/db = 20 10log /GH(jw)/ y como GH(s) está formada por una serie de factores en su forma normalizada esto es: /GH(jw/ db)/= quedaría como
GH(jw) = 20 log10[)1)(1(
)1()(2
2
1
jwBwAwjwjwkjwGH
+−+
+=
ττ
Que es equivalente a: /GH(jw)/db =20 log10 /K/ + 20 log10 /1+jwτ/ - 20 log10 /jw/ - 20 log10 /jwB+ (1-Aw²) / - 20 log10 /1 + jwτ2/ Tenemos que /GH(jw)/db está formada por la suma de efectos individuales de cada uno de los términos lo cual nos da oportunidad a que al conocer como se comportan los términos individuales tipo, podamos mediante una suma de efectos, determinar el comportamiento del todo.
b) En caso de defasamiento tenemos que si:
GH(s) = )1)(1(
)1(2
2
1
++++
BsAssssk
ττ
φs = tg( k) + tg (wτ) – tg( jw) – tg (Bw/1-Aw²) – tg(τ2) Con lo cual tenemos también una suma de efectos individuales.
c) Además de las características presentadas anteriormente, podemos observar un comportamiento aproximado a líneas rectas de parte de los factores individuales tipo de una función de transferencia; esto le da el nombre de gráfico de Bode

Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
asintotico, cuya justificación está basada en el análisis por medio del Bode teórico de factores tipo que podamos encintrar en una función de transferencia y que es lo que trataremos de mostrar a continuación.
1.- Ganancia estática constante.
GH(s) = K GH(s) = GH(jw) = K
/ GH(jw) /db = 20 10log ( K)
φs = tg( K0 ) = 0
/GH(jw)/ db
Log10 w φs log10 w 2.- Integrador simple.
GH(s) = 1/s
GH(s) = GH(jw) = 1 / jw
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
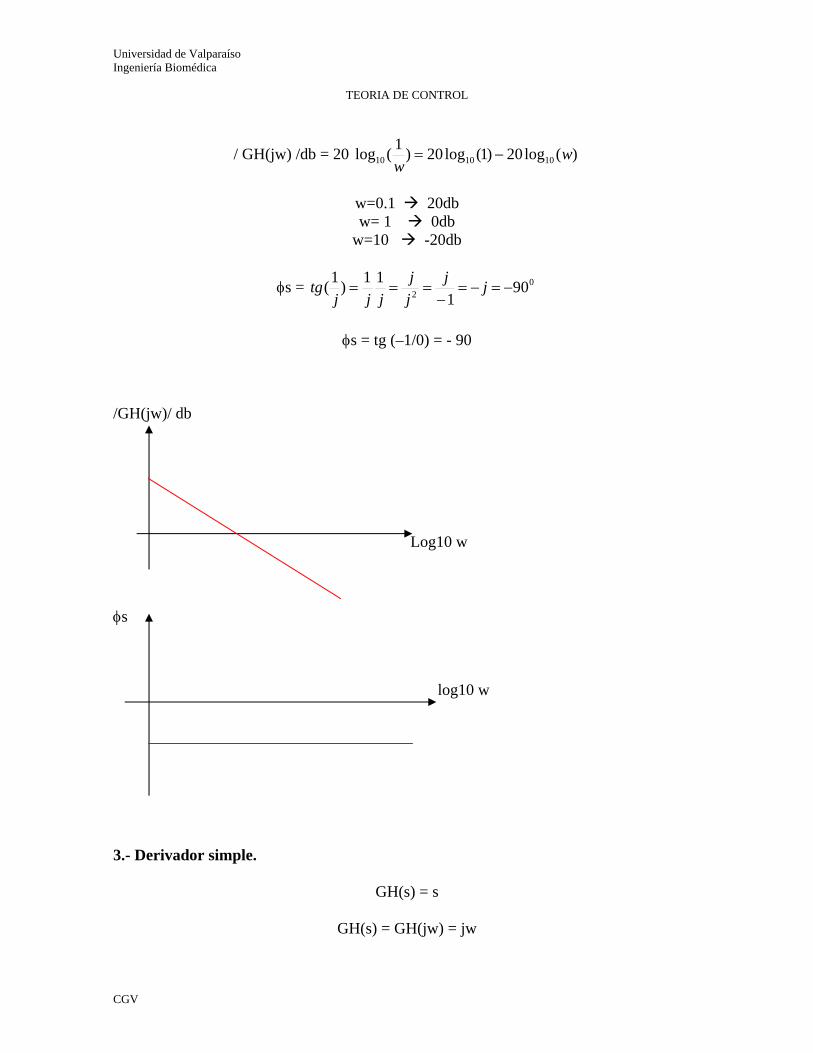
/ GH(jw) /db = 20 )(log20)1(log20)1(log 101010 ww
−=
w=0.1 20db w= 1 0db
w=10 -20db
φs = 02 90
111)1( −=−=
−=== jj
jj
jjjtg
φs = tg (–1/0) = - 90
/GH(jw)/ db
Log10 w φs log10 w 3.- Derivador simple.
GH(s) = s
GH(s) = GH(jw) = jw
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
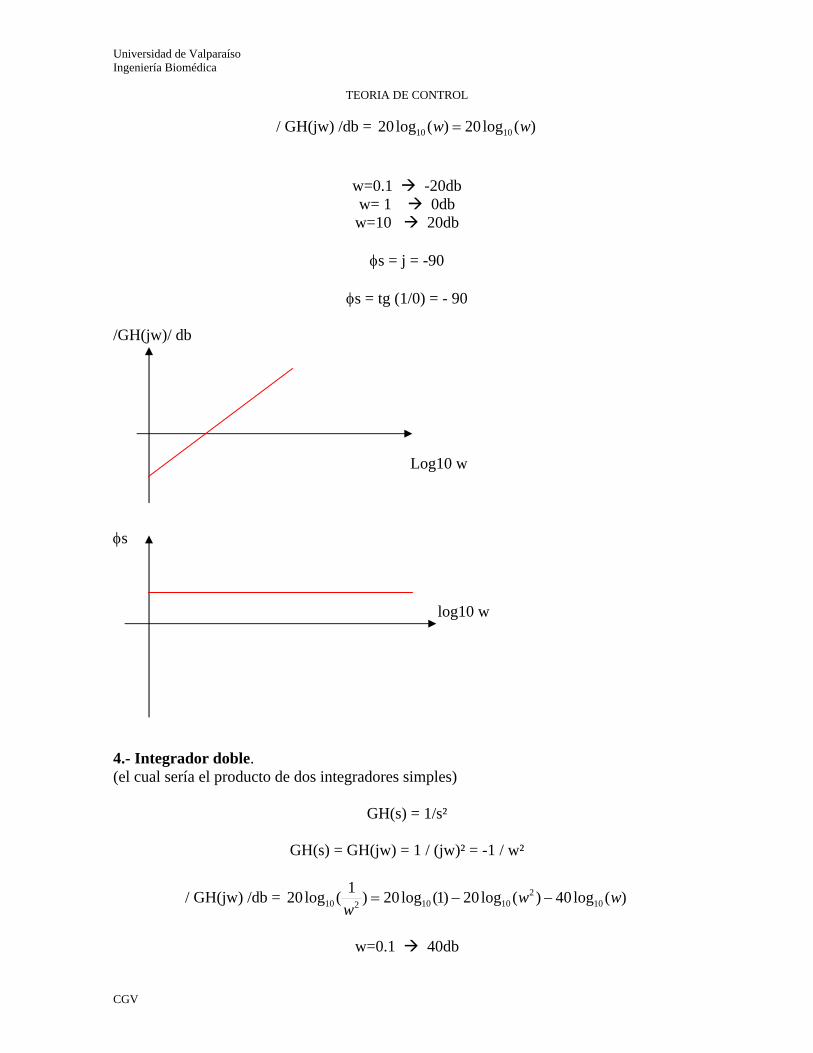
/ GH(jw) /db = )(log20)(log20 1010 ww =
w=0.1 -20db w= 1 0db w=10 20db
φs = j = -90
φs = tg (1/0) = - 90
/GH(jw)/ db
Log10 w φs log10 w 4.- Integrador doble. (el cual sería el producto de dos integradores simples)
GH(s) = 1/s²
GH(s) = GH(jw) = 1 / (jw)² = -1 / w²
/ GH(jw) /db = )(log40)(log20)1(log20)1(log20 102
1010210 www
−−=
w=0.1 40db
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
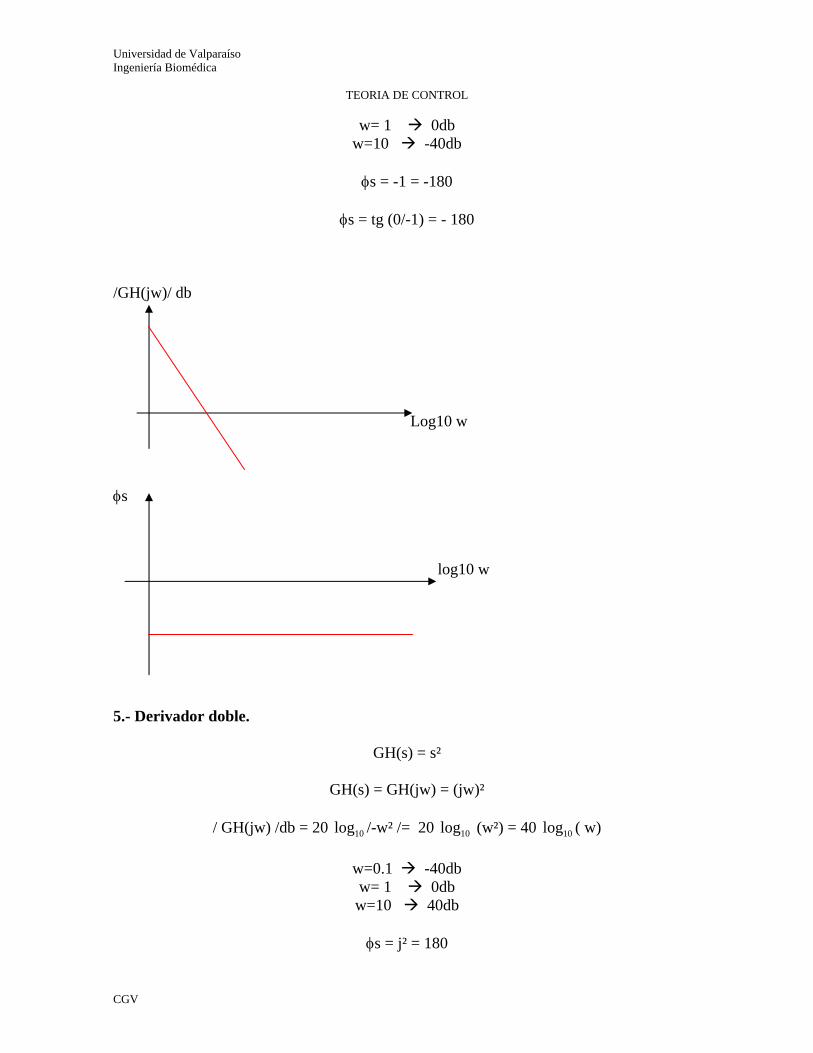
w= 1 0db w=10 -40db
φs = -1 = -180
φs = tg (0/-1) = - 180
/GH(jw)/ db
Log10 w φs log10 w 5.- Derivador doble.
GH(s) = s²
GH(s) = GH(jw) = (jw)²
/ GH(jw) /db = 20 10log /-w² /= 20 10log (w²) = 40 10log ( w)
w=0.1 -40db w= 1 0db w=10 40db
φs = j² = 180
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
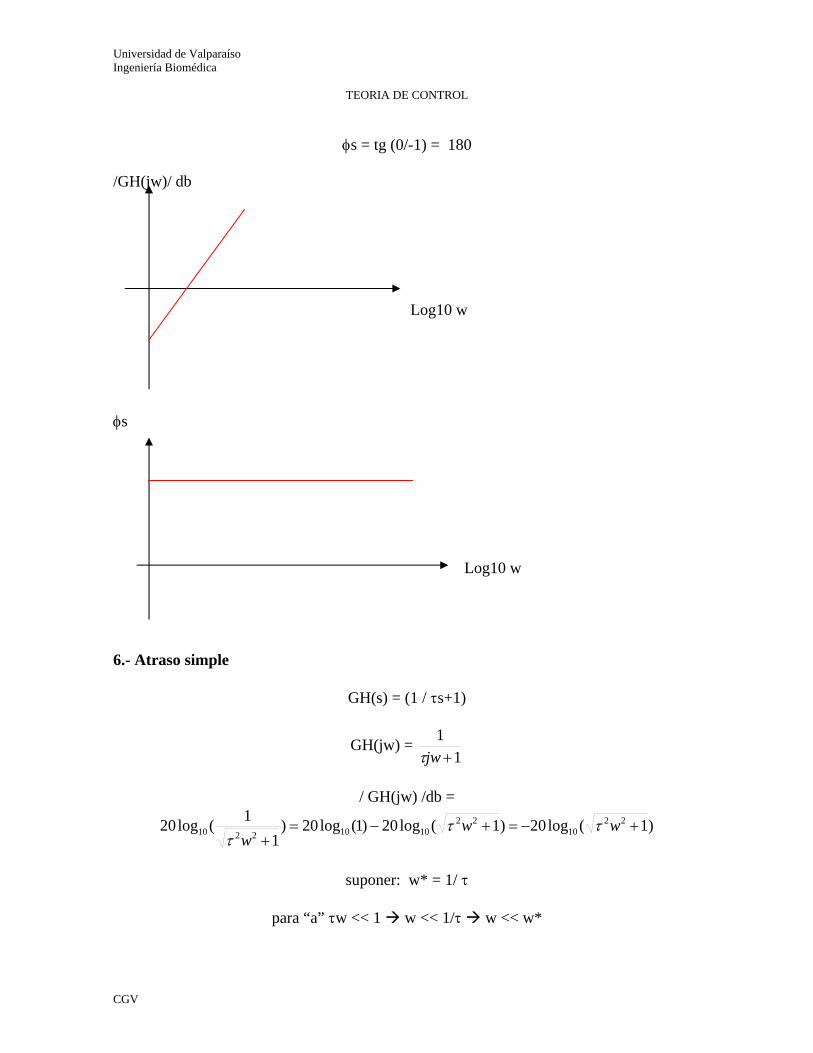
φs = tg (0/-1) = 180
/GH(jw)/ db
Log10 w φs Log10 w 6.- Atraso simple
GH(s) = (1 / τs+1)
GH(jw) = 1
1+jwτ
/ GH(jw) /db =
)1(log20)1(log20)1(log20)1
1(log20 2210
2210102210 +−=+−=
+ww
wττ
τ
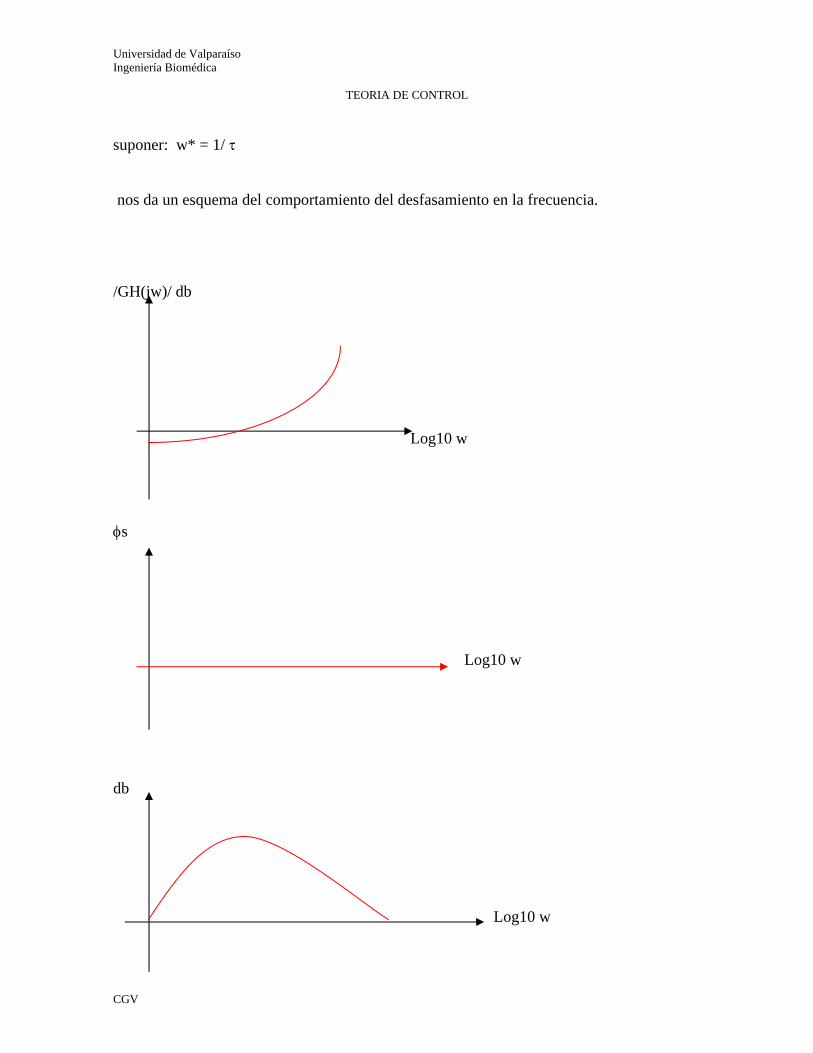
suponer: w* = 1/ τ
para “a” τw << 1 w << 1/τ w << w*

Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
/ GH(jw) /db = -20 10log (√1) = 0db para “b” τw = 1 w = 1/τ w = w*
/ GH(jw) /db = -20 10log (√2) = - 3db para “c” τw >> 1 w >> 1/τ w >> w*
/ GH(jw) /db = -20 )1(log 2210 +wτ =- 20 10log ( τw) = -20 10log ( τ) - 20 10log (w)
= -20 (db/dec)
φs = - tg τw para “a” τw << 1 w << 1/τ w << w*
φs = - tg 0 = 0 para “b” τw = 1 w = 1/τ w = w*
φs = - tg 1 = - 45 para “c” τw >> 1 w >> 1/τ w >> w*
φs = - tg ∞ = - 90 ejemplificando para w = w*/10 , w* y 10w*
si w = w*/10 φs = -tg ( 5)101()
101 *
* −=−= tgww
si w = w* φs = -tg ( )1 ** w
w = -tg 1 = - 45
si w = 10w* φs = -tg ( ** 101 w
w) = -tg 10 = - 84
lo cual nos da un esquema del comportamiento del defasamiento en la frecuencia.
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
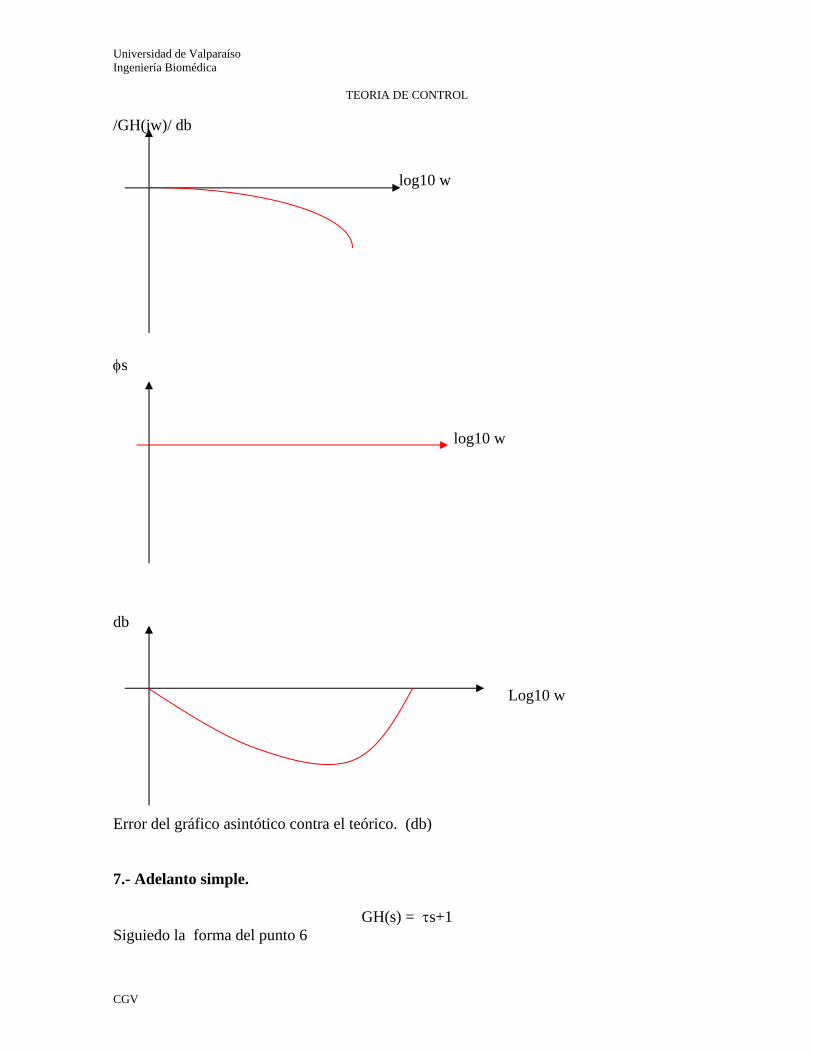
/GH(jw)/ db log10 w
φs log10 w db Log10 w Error del gráfico asintótico contra el teórico. (db) 7.- Adelanto simple.
GH(s) = τs+1 Siguiedo la forma del punto 6
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
suponer: w* = 1/ τ nos da un esquema del comportamiento del desfasamiento en la frecuencia. /GH(jw)/ db
Log10 w φs Log10 w db Log10 w
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
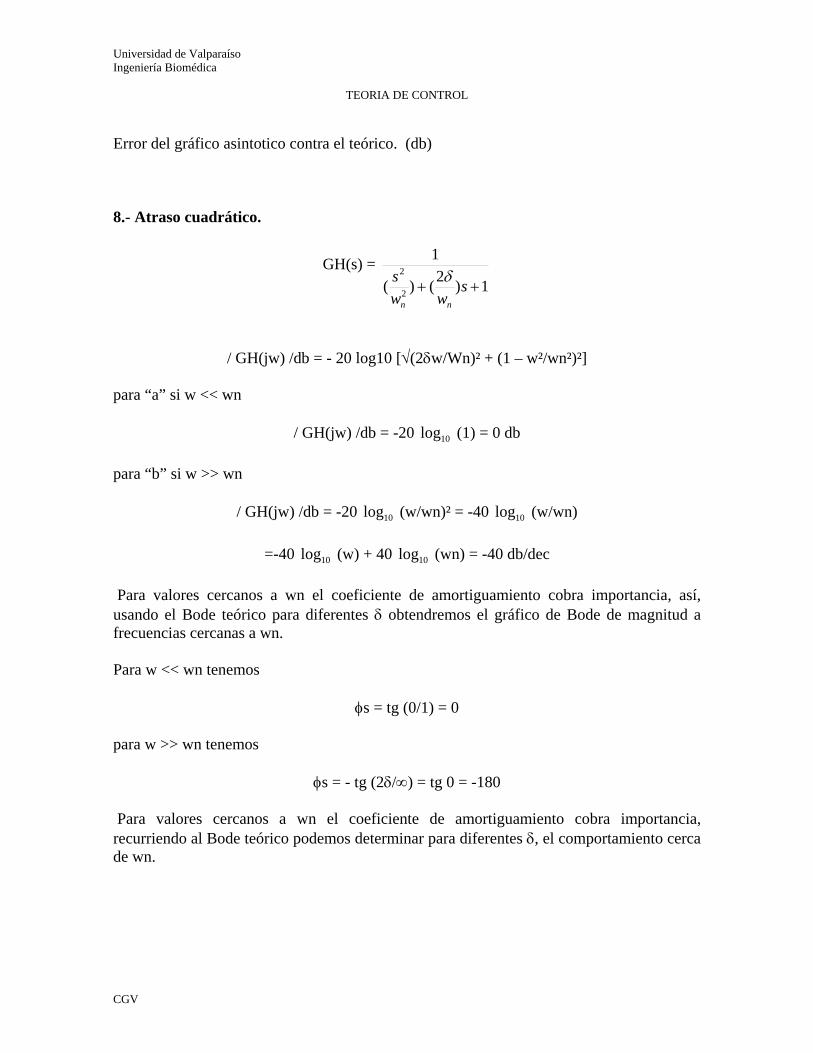
Error del gráfico asintotico contra el teórico. (db) 8.- Atraso cuadrático.
GH(s) = 1)2()(
1
2
2
++ sww
s
nn
δ
/ GH(jw) /db = - 20 log10 [√(2δw/Wn)² + (1 – w²/wn²)²] para “a” si w << wn
/ GH(jw) /db = -20 10log (1) = 0 db para “b” si w >> wn
/ GH(jw) /db = -20 10log (w/wn)² = -40 10log (w/wn)
=-40 10log (w) + 40 10log (wn) = -40 db/dec Para valores cercanos a wn el coeficiente de amortiguamiento cobra importancia, así, usando el Bode teórico para diferentes δ obtendremos el gráfico de Bode de magnitud a frecuencias cercanas a wn. Para w << wn tenemos
φs = tg (0/1) = 0 para w >> wn tenemos
φs = - tg (2δ/∞) = tg 0 = -180 Para valores cercanos a wn el coeficiente de amortiguamiento cobra importancia, recurriendo al Bode teórico podemos determinar para diferentes δ, el comportamiento cerca de wn.
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
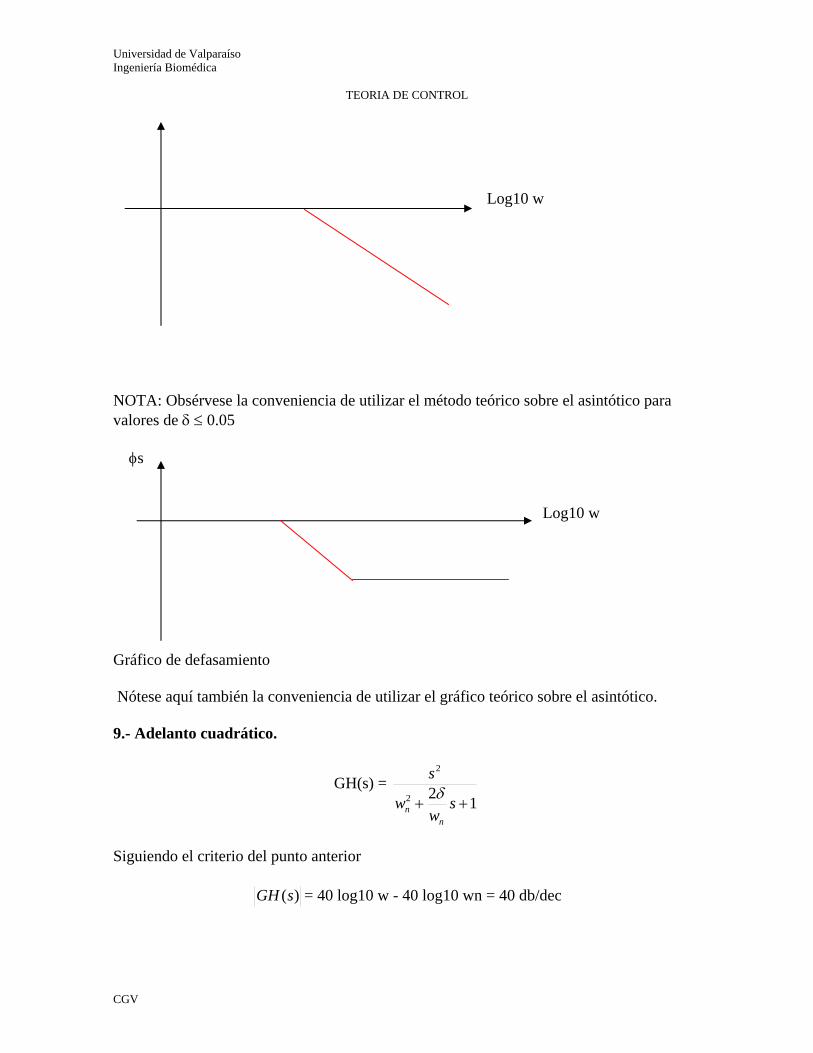
Log10 w NOTA: Obsérvese la conveniencia de utilizar el método teórico sobre el asintótico para valores de δ ≤ 0.05 φs Log10 w Gráfico de defasamiento Nótese aquí también la conveniencia de utilizar el gráfico teórico sobre el asintótico. 9.- Adelanto cuadrático.
GH(s) = 122
2
++ sw
w
s
nn
δ
Siguiendo el criterio del punto anterior
)(sGH = 40 log10 w - 40 log10 wn = 40 db/dec
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
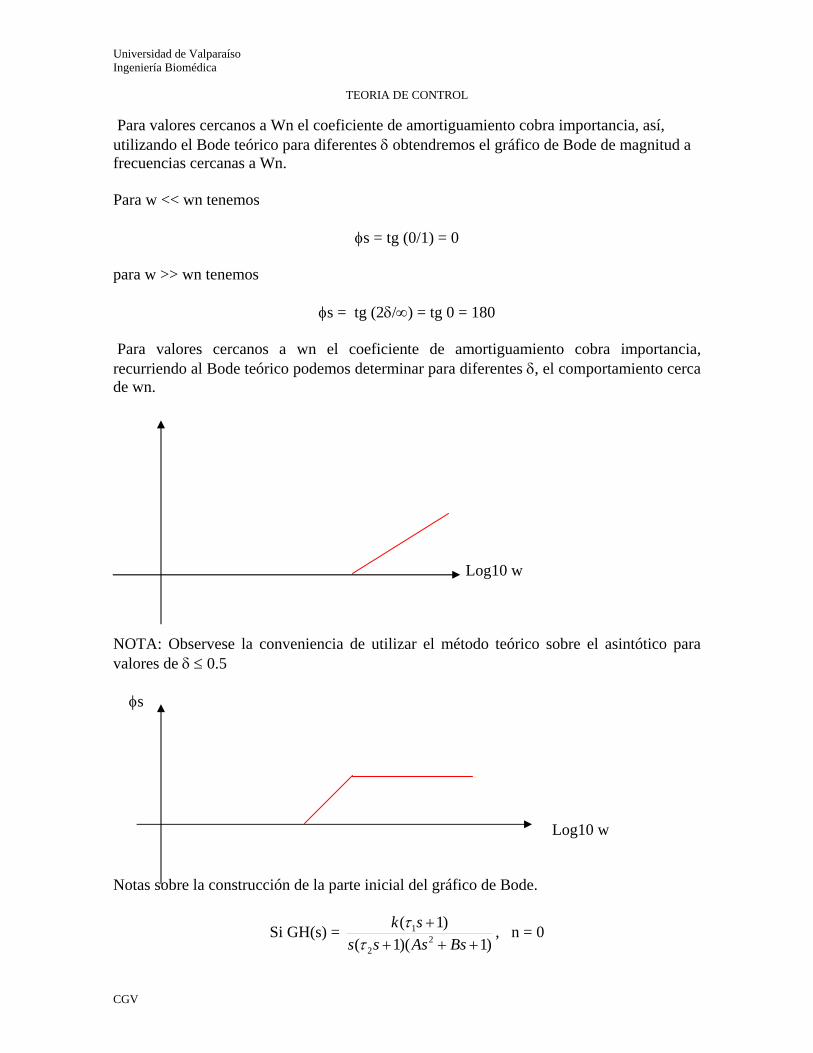
Para valores cercanos a Wn el coeficiente de amortiguamiento cobra importancia, así, utilizando el Bode teórico para diferentes δ obtendremos el gráfico de Bode de magnitud a frecuencias cercanas a Wn. Para w << wn tenemos
φs = tg (0/1) = 0 para w >> wn tenemos
φs = tg (2δ/∞) = tg 0 = 180 Para valores cercanos a wn el coeficiente de amortiguamiento cobra importancia, recurriendo al Bode teórico podemos determinar para diferentes δ, el comportamiento cerca de wn. Log10 w NOTA: Observese la conveniencia de utilizar el método teórico sobre el asintótico para valores de δ ≤ 0.5 φs Log10 w Notas sobre la construcción de la parte inicial del gráfico de Bode.
Si GH(s) = )1)(1(
)1(2
2
1
++++
BsAssssk
ττ , n = 0
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
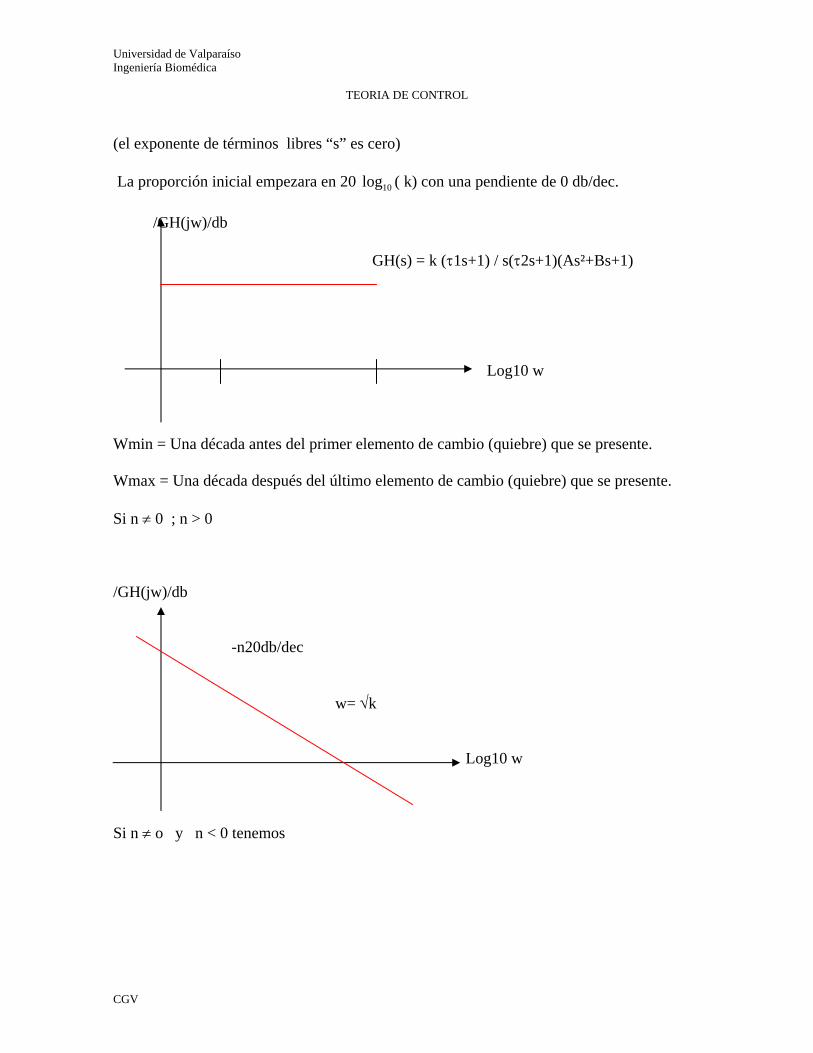
(el exponente de términos libres “s” es cero) La proporción inicial empezara en 20 10log ( k) con una pendiente de 0 db/dec. /GH(jw)/db
GH(s) = k (τ1s+1) / s(τ2s+1)(As²+Bs+1) Log10 w Wmin = Una década antes del primer elemento de cambio (quiebre) que se presente. Wmax = Una década después del último elemento de cambio (quiebre) que se presente. Si n ≠ 0 ; n > 0 /GH(jw)/db -n20db/dec w= √k Log10 w Si n ≠ o y n < 0 tenemos
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
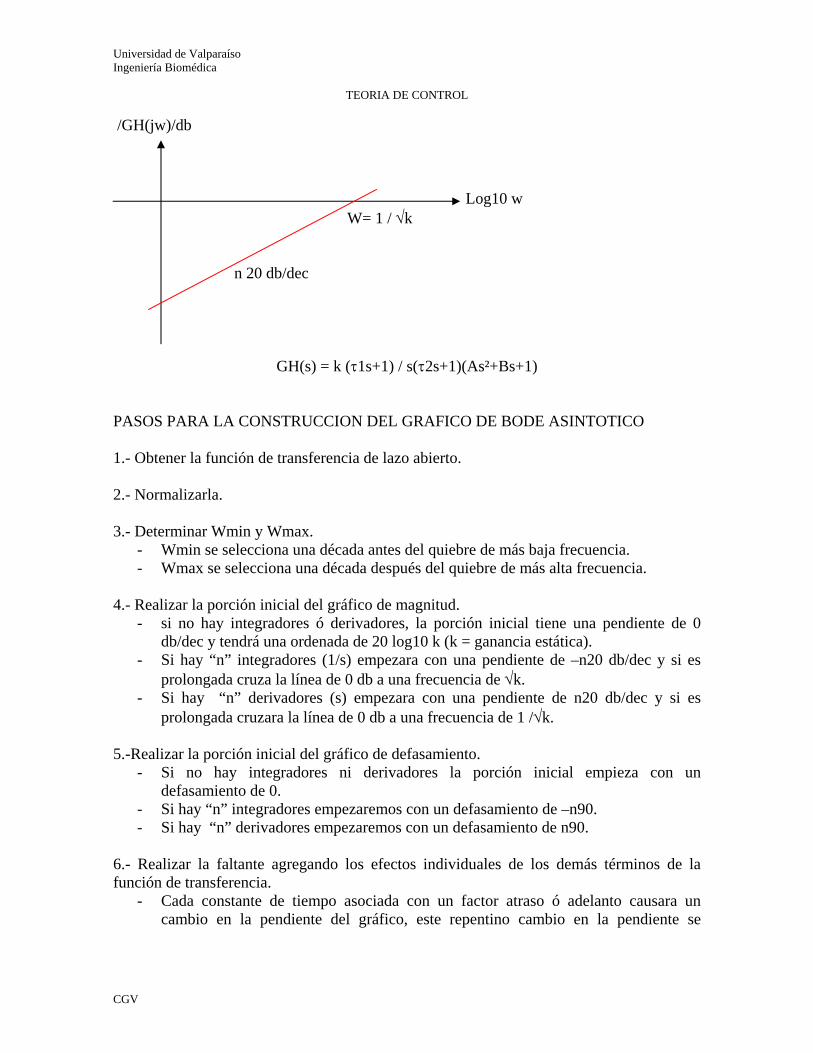
/GH(jw)/db Log10 w W= 1 / √k n 20 db/dec
GH(s) = k (τ1s+1) / s(τ2s+1)(As²+Bs+1) PASOS PARA LA CONSTRUCCION DEL GRAFICO DE BODE ASINTOTICO 1.- Obtener la función de transferencia de lazo abierto. 2.- Normalizarla. 3.- Determinar Wmin y Wmax.
- Wmin se selecciona una década antes del quiebre de más baja frecuencia. - Wmax se selecciona una década después del quiebre de más alta frecuencia.
4.- Realizar la porción inicial del gráfico de magnitud.
- si no hay integradores ó derivadores, la porción inicial tiene una pendiente de 0 db/dec y tendrá una ordenada de 20 log10 k (k = ganancia estática).
- Si hay “n” integradores (1/s) empezara con una pendiente de –n20 db/dec y si es prolongada cruza la línea de 0 db a una frecuencia de √k.
- Si hay “n” derivadores (s) empezara con una pendiente de n20 db/dec y si es prolongada cruzara la línea de 0 db a una frecuencia de 1 /√k.
5.-Realizar la porción inicial del gráfico de defasamiento.
- Si no hay integradores ni derivadores la porción inicial empieza con un defasamiento de 0.
- Si hay “n” integradores empezaremos con un defasamiento de –n90. - Si hay “n” derivadores empezaremos con un defasamiento de n90.
6.- Realizar la faltante agregando los efectos individuales de los demás términos de la función de transferencia.
- Cada constante de tiempo asociada con un factor atraso ó adelanto causara un cambio en la pendiente del gráfico, este repentino cambio en la pendiente se
Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
denomina quiebre. El primer quiebre ocurrirá a la menor frecuencia que esta asociada con la constante de tiempo más grande.
- Una constante de tiempo τ de un atraso cambiara la pendiente de la recta del gráfico de Bode –20 db/dec a la frecuencia de quiebre. W = 1/ τ
- Una constante de tiempo τ de un adelanto cambiara la pendiente de la recta del gráfico de Bode 20db/dec a la frecuencia de quiebre. W = 1 / τ.
- Un factor atraso cuadrático cambiara la pendiente de la recta del gráfico de Bode – 40 db/dec a la frecuencia de quiebre w = Wn (esto para δ ≤ 0.5)
- Un factor adelanto cuadrático cambia la pendiente de la recta del gráfico de Bode 40 db/dec a la frecuencia de quiebre W = Wn (esto para δ ≤ 0.5)
- En el caso del defasamiento, las contribuciones comenzaran a ser dadas una década antes del quiebre, en el quiebre llevaran la mitad de la contribución total y una década después terminarán de dar su contribución final.
EJEMPLO. Obtener el diagrama de Bode.
GH(s) = )101.0)(120(
1000++ ss
Solución: Obtener las constantes de tiempo. τ1 = 0.01 seg w1= 100 r/s τ2 = 20 seg w2 = 0.05 r/s Obtener Wmin y Wmax Wmin = 0.005 r/s y Wmax = 1000 r/s Pendiente inicial 0 (db/dec) Gh(jw) bd = 20 10log / 1000 / = 60 db φs inicial = 0 Trazar la gráfica de magnitud y de defasamiento.

Universidad de Valparaíso Ingeniería Biomédica
TEORIA DE CONTROL
CGV
/GH(jw)/ db
Log10 w φs log10 w