Embed Size (px)
DESCRIPTION
Minimovka
Citation preview

Fakulta Matematiky, Fyziky
a Informatiky
Univerzita Komenského v Bratislave
Progresívne optické metódy reverzného inžinierstva a rýchleho prototypovania v medicíne
Písomná práca k odbornej dizertačnej skúške
2005 Mgr. Ján Čarnický

Fakulta Matematiky, Fyziky a Informatiky
Katedra jadrovej fyziky a biofyziky
Progresívne optické metódy reverzného inžinierstva a rýchleho prototypovania v medicíne
Písomná práca k odbornej dizertačnej skúške
V Bratislave 2005 Mgr. Ján Čarnický

Čestne prehlasujem, že prácu som vypracoval samostatne, pod odborným vedením
môjho školiteľa a s použitím uvedenej literatúry
______________________

Predložená práca bola spracovaná v súčinnosti s realizáciou grantu APVT-20-014602 - progresívne optické a laserové technológie pre reverzné inžinierstvo a rýchle prototypovanie.
Za morálnu podporu a trpezlivosť ďakujem najmä mojej rodine, ako aj všetkým
priateľom. Ďakujem môjmu školiteľovi Prof. RNDr. Dušanovi Chorvátovi, DrSc. za
umožnenie tejto práce, poskytnutie možnosti využívať prístrojové vybavenie Medzinárodného Laserového Centra (MLC), ako aj mnohé rady a literatúru.
Moja veľká vďaka za spoluprácu, nadšenie a inšpirujúce rady patrí najmä môjmu špecializovanému školiteľovi RNDr. Dušanovi Chorvátovi, PhD.
Veľkým prínosom pre túto prácu boli tiež mnohé rady zamestnancov Medzinárodného Laserového Centra, najmä rady RNDr. A. Mateášika , a RNDr. J. Smolku v oblasti 3D grafiky a spracovania obrazu, RNDr. M. Držíka, CSc. v oblasti mechanických vlastností stereolitografických materiálov, ako aj odborné rady MUDr. Ľ. Bachárovej, CSc. a RNDr. M. Cagalinca.
Za spoluprácu, literatúru a rady týkajúce sa spracovania 3D obrazu ďakujem Ústavu počítačovej grafiky a spracovania obrazu KAI FMFI UK, menovite RNDr. A. Ferkovi, CSc., RNDr. M. Fanovi PhD. a RNDr. P. Kubínimu. Obzvlášť ďakujem RNDr. Marekovi Zimányimu za poskytnutie textov k jeho prednáškam o metódach trojrozmerného snímania obrazu.
Katedre antropológie PriF UK ďakujem za zapožičanie lebky ako aj pomoc v oblasti antropológie, moja vďaka patrí najmä RNDr. R. Beňušovi, PhD. a Doc. RNDr. M. Thurzovi, CSc.
Pre moju prácu boli veľkým prínosom odborné rady RNDr. M. Daniela, PhD. týkajúce sa mechanických vlastností stereolitografických materiálov. Taktiež mu ďakujem za umožnenie ťahových skúšok stereolitografických materiálov, za pomoci Ing. R. Sedláčka z Laboratória mechanických testov ČTU v Prahe .
Za pomoc zo zaobstarávaním informácií a literatúry ďakujem Prof. RNDr. T. Hianikovi, DrSc., R. Krivánekovi PhD., Mgr. E. Polákovej, Mgr. L. Zemanovej, RNDr. Mgr. E. Štefánekovej, RNDr. Cs. Bíróvi, J. Kirchnerovej, RNDr. M. Gondovi, RNDr. J. Podskočovej, Mgr. V.Polohovej a RNDr. P. Musilovi.
Ďakujem tiež mnohým ochotným ľuďom, za separátne výtlačky článkov a rady zaslané prostredníctvom pošty a elektronickej pošty.
V neposlednej miere ďakujem všetkým dobrovoľníkom, ktorých tváre som mal možnosť nasnímať.

Obsah
1 Úvod 1
2 Prehľad súčasného stavu problematiky 3
2.1 Experimentálne metódy reverzného inžinierstva 3
2.1.1 „Image content“ metódy 5
2.1.2 Stereoskopické metódy 6
2.1.3 Metódy merania vzdialenosti (range scanners) 8
2.1.4 Metódy vychádzajúce zo zmeny ohniska 9
2.1.5 Metóda analýzy pohybu 10
2.1.6 Interferometrické metódy 10
2.1.7 Kontaktné metódy 11
2.1.8 Štrukturované svetlo 12
2.2 Experimentálne metódy rýchleho prototypovania 17
2.2.1 Základné postupy 18
2.2.2 Laminated object manufacturing (LOM) 19
2.2.3 Selective laser sintering (SLS) 20
2.2.4 Fused deposition Modeling (FDM) 20
2.2.5 Solid ground curing (SGC) 20
2.2.6 3D Ink-Jet Printring 21
2.2.7 Stereolitografia (SLA) 22
2.3 Využitie povrchových trojrozmerných obrazov v medicíne 30
2.4 Trojrozmerné počítačové modelovanie tváre a hlavy 32
2.5 Využitie rýchleho prototypovania v medicíne 35
3 Projekt dizertačnej práce 38
4 Metódy riešenia projektu 39
4.1 Štruktúrované svetlo 39
4.2 Stereolitografia 43
5 Dosiahnuté výsledky 45
6 Literatúra 65

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 1
1 Úvod
Pod pojmom reverzné inžinierstvo ( RE, angl. Reverse Engineering ) sa vo
všeobecnosti chápu metódy získania technických špecifikácií objektu, alebo systému,
ktorého technická špecifikácia nie je dostupná. Reverzné inžinierstvo je procesom
analýzy systému identifikáciou komponent tohto systému a ich vzájomných
vzťahov, ako aj následného vytvárania reprezentácie systému v inej forme alebo na
inej úrovni abstrakcie [1, 2]. Pojem RE má pôvod v analýze strojov, elektroniky a ich
dizajnu, dnes sa často používa aj pre software [1]. Pre reverzné inžinierstvo v oblasti
dizajnu sa používa aj označenie Computer Aided Reverse Engineering (CARE) [1].
RE sa v súčasnosti najčastejšie používa pre predmety historickej hodnoty ako aj
technické zariadenia, pre ktoré špecifikácia nie je k dispozícii [1, 2]. Trojrozmerné
modely sú dôležité v oblasti medicínskych technológií a v súčasnosti sa často
používajú pre diagnostiku ako aj predoperačnú prípravu [3, 4]. Pojem reverzné
inžinierstvo sa v biomedicínskych aplikáciách používa, ak ide o získanie technických
špecifikácií vlastností tkanív a orgánov, tvorbu modelov pre optimalizáciu
mechanických a tepelných vlastností, ako aj tvaru implantátov. Je vstupom pre
modelovanie pôsobiacich síl a tlakov, ako aj modelovanie prúdenia telesných tekutín.
Model vytvorený metódami reverzného inžinierstva je možné upraviť metódami
priameho inžinierstva (direct engineering), teda metódami pre tvorbu technických
špecifikácií (modelu), ktorý je možné použiť priamo pre výrobu skutočného objektu
[1].
Naša práca je zameraná získavanie trojrozmerných modelov biologických
štruktúr. Jej cieľom je rešerš problematiky týkajúcej sa snímania povrchových
trojrozmerných obrazov tváre pomocou zariadenia ShapeCam od firmy Eyetronics,
využívajúceho metódu štruktúrovaného svetla. Chceli by sme sa taktiež zamerať na
postupy vytvorenia modelu mäkkého tkaniva tváre, v prípade známych
trojrozmerných informácií o lebke na základe odstupov v špecifických bodoch.
Rýchle prototypovanie (RP, Rapid Prototyping) sa zaoberá rýchlou výrobou
skutočného hmotného prototypu na základe jeho trojrozmerného počítačového
modelu. Metódy rýchleho prototypovania sú v dnešnej dobe veľmi progresívne, pre
krátky čas, za ktorý je možné vytvoriť prototyp, vysokú presnosť a pomerne nízku

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 2
cenu výroby detailného modelu. Model vytvorený metódami rýchleho prototypovania
je možné použiť aj na výrobu foriem, prípadne lisov, ktoré vytvárajú možnosť vyrobiť
tisíce kusov hotových súčiastok do týždňa po vytvorení počítačového modelu.
V medicíne je dôležitá rýchlosť a presnosť metód rýchleho prototypovania, pre
diagnostiku a prípravu operácii je veľkým prínosom možnosť vytvárať priesvitné
modely [5, 6]. Pre tvorbu individuálnych implantátov je dôležitá možnosť vytvárať
pomocou stereolitografických prototypov lisy na lisovanie titánových implantátov
presných rozmerových charakteristík. Stereolitografia je vhodnou metódou na výrobu
foriem pre biologicky degradovateľné [7] ako aj biologicky inertné implantáty.
Nezanedabateľnou je aj možnosť vytvárať modely biologických štruktúr zložitej
geometrie pre edukačné účely.
V predkladanej práci sa zameriavame na postupy získavania a úpravy
trojrozmerných dát, pomocou ktorých by bolo možné vytvárať prototypy optimálnych
rozmerových a mechanických vlastností.
V prípade existencie vhodných vstupných trojrozmerných dát budeme schopní
vytvárať pomocou stereolitografu LS 250 prototypy vhodné pre plánovanie operácii,
prípadne výrobu prototypov nástrojov pre medicínske využitie.
Cieľom tejto práce je:
- Rešerš literatúry z oblasti optických metód reverzného inžinierstva
a rýchleho prototypovania a ich aplikácií v antropológii a medicíne.
- Formulácia cieľa dizertačnej práce.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 3
2 Prehľad súčasného stavu problematiky
2.1 Experimentálne metódy reverzného inžinierstva
Jedným z časovo najnáročnejších aspektov práce s trojrozmernými dátami je
vytváranie geometrických modelov skutočných objektov. V dnešnej dobe existuje
množstvo komerčne dostupných metód a zariadení na 3D snímanie. Sú vypracované
metódy na získanie trojrozmerných modelov objektov od molekulových veľkostí, cez
modely kostí, lietadiel, historických pamiatok, až po metódy pre tvorbu geologických
máp.
Aplikácie, v ktorých sa využíva rekonštrukcia trojrozmerných objektov
zasahujú do mnohých odvetví, ako napr. priemyselná výroba, virtuálne simulácie,
medicínske aplikácie, vedecký výskum, reverzné inžinierstvo, počítačové
modelovanie pomocou CAD (angl. Computer Aided Design) systémov, výroba
prototypov automobilov, špeciálne efekty, počítačové hry a virtuálna realita, prípadne
sprístupnenie muzeálnych artefaktov [8, 9, 10, 11]. V oblasti snímania a rekonštrukcie
tvaru objektov nastal v posledných desaťročiach rýchly vývoj. Vzrastajúci záujem o
túto oblasť je úzko spätý so zdokonaľovaním snímacích a digitalizačných zariadení a
so stále väčšou potrebou digitalizácie trojrozmerných dát.
Základný proces získavania 3D dát pozostáva z fázy vlastného snímania a fázy
rekonštrukcie 3D modelu z nasnímaných dát. Vo fáze snímania sa zbierajú
priestorové dáta. Snímané údaje geometrických štruktúrach môžu obsahovať
informácie o hraniciach objektov (3D mračná bodov - point clouds) alebo plnú 3D
informáciu o objeme objektu (tomografia).
V medicínskych aplikáciách existuje v súčasnej dobe mnoho rôznych
zariadení, schopných nedeštruktívne získavať plnú trojrozmernú informáciu
o snímanom objekte (CT, MRI, PET, 3D-ultrazvukové metódy), ktoré sa vďaka
svojim vynikajúcim vlastnostiam aj veľmi často používajú pre rôzne typy diagnostiky.
Jedinou zreteľnou nevýhodou týchto zariadení je ich vysoká cena a náklady na
údržbu. Dáta získavané pomocou takýchto zariadení je možné použiť na výrobu
modelov metódami rýchleho prototypovania v rámci nášho pracoviska. Pre našu
prácu sú však postačujúce povrchové trojrozmerné dáta, ktoré je možné získať
tradičnými optickými, prípadne dotykovými postupmi reverzného inžinierstva.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 4
Trojrozmerné skenery sú zariadenia schopné získavať 3D informáciu
o snímanom objekte, jeho povrchu, alebo jeho časti [12].
Efektívne metódy snímania trojrozmerných objektov možno rozdeliť na
základe spôsobu snímania na aktívne a pasívne.
Pasívne metódy pri ktorých hĺbka je rekonštruovaná iba z intenzít - obrázkov,
sú založené na dvoch alebo viacerých záberoch scény na vytvorenie 3D dát (stereo-
vision, structure from motion). Sú použiteľné v mnohých aplikáciách, kde presnosť
nie je najdôležitejším parametrom. Nájsť navzájom si zodpovedajúce body na
snímkach môže byť technicky náročné, čo je podstatné v procese rozoznávania.
Rekonštrukcia takýchto dát zaberá veľa času, na viac hladké povrchy bez farebných
vzorov väčšinou nie je možné dobre rozoznať. Takéto plochy nemajú hrany, ktoré sú
základom tradičných metód spracovania.
Aktívne metódy interagujú s prostredím, čím sa zľahčuje hľadanie
korešpondujúcich hrán. Dochádza k projekcii niektorého typu energie (pattern of
light, sonar impulses) na scénu a detekuje sa jej pozícia; alebo využívanie efektu
kontrolovanej zmeny niektorých parametrov (napr. ohnisková vzdialenosť). Pri
niektorých aktívnych metódach stačí 1 záber na získanie hĺbky scény.
Často používané užšie rozdelenie 3D scanovacích metód je na:
• Stereovízia - Metódy založené na používaní stereo kamier, rozdielne druhy
štruktúrovaného svetla a hĺbky z obrysov.
• Image content - Metódy založené na zisťovaní hĺbky z tieňov a textúry.
• Range scanner - Metódy založené na používaní laserového range skenera,
sonary, radary a lidary.
• Focus - Metódy založené na zisťovaní hĺbky zo zaostrovania.
• Motion - Metódy založené na získavaní hĺbky z pohybu a transfokácie
(preostrovanie).
• Physical contact - 3D dotykové snímače.
Často sa tiež používa rozčlenenie metód 3D snímania na optické a neoptické. Podľa
toho či spracovávajú odrazenú alebo objektom prechádzajúcu časť tohto žiarenia,
rozdeľujeme tieto metódy na reflektívne (napr. radar) a transmisné (napr. počítačová

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 5
tomografia). Reflektívne metódy môžeme ďalej rozdeliť na metódy využívajúce
svetelnú energiu (optické metódy) a iné metódy, ktoré nevyužívajú svetelné javy
(napr. sonar alebo mikrovlnný radar). Princíp optických metód spočíva v premietaní
svetelného zväzku na objekt a následnej rekonštrukcií tvaru objektu meraním
charakteristík odrazenej svetelnej zložky. Patrí sem napr. laserový radar (lidar),
interferometrické metódy, metódy využívajúce rozostrenie obrazu na rekonštrukciu
tvaru, stereovízia a optická triangulácia.
Prehľad metód použiteľných na 3D snímanie objektov je znázornený na Obr. 1[13].
Obr. 1.: Prehľad aktívnych metód rekonštrukcie 3D objektov [13]
2.1.1 „Image content“ metódy
Získavanie modelu objektu je tiež možné za istých podmienok aj z jedinej
fotografie, buď pomocou tieňov alebo na základe analýzy textúry.
Model z tieňov
Táto metóda sa používa niekedy napr. pri detekcii výšok budov z leteckých
snímok. Pri tejto metóde je nutné zistiť polohu zdroja svetla. Predpokladáme, že v
obraze sa nachádzajú tiene objektov s nenulovou výškou. Táto metóda nie je veľmi

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 6
používaná v oblasti snímania biologických štruktúr, ktoré je potrebné snímať
s vysokým rozlíšením
Choi et al [14] vyvinuli metódu merania pozície tváre na základe metódy
získavania povrchu z tieňov. Táto metóda sa opiera o zmenu histogramu obrazu v
závislosti od rôzneho uhla pohľadu na tvár.
Model z textúry
Táto metóda je vhodné pre objekty a ktorých povrchu sa opakuje rovnaký
farebný vzor nemenného tvaru.
2.1.2 Stereoskopické metódy
Hlavným cieľom stereo-metód je získanie 3D informácie o 3D objekte z 2D
obrázkov. Tieto metódy patria k najrozšírenejšej množine na získavania 3D
informácie o existujúcich objektoch, scénach aj vďaka relatívnej finančnej
nenáročnosti.
Stereo metódy sú založené na stereoskopickom videní (stereoscopic vision),
Vychádza z rozdielnosti (disparity) obrazov objektu z jedného a druhého oka
v ľudskom vizuálnom systéme. Medzi dvoma uhlami pohľadu vytvára možnosť
vidieť do hĺbky, alebo rekonštruovať tretí rozmer.
Najjednoduchšie sa vizuálny systém človeka napodobňuje pomocou dvoch
kamier. Namiesto druhej kamery je možné použiť zrkadlo. Často sa používajú rôzne
konfigurácie viacerých zrkadiel alebo kamier. Obrázky z kamier (fotoaparátov)
obsahujú väčšinou informáciu o intenzite (farba) bodu, zobrazeného projekciou na 2D
obrázok. Na zistenie vzdialenosti od 3D bodu daného objektu je potrebných niekoľko
krokov: kalibrácia kamery, nájdenie a párovanie korešpondujúcich bodov
a triangulácia.
Počas kalibrácie kamery sa zisťujú vnútorné a vonkajšie parametre kamery
(intrinsic and extrinsic parameters). Vonkajšie parametre kamery sú napr. poloha
kamery, orientácia. Medzi vnútorné patria ohnisková vzdialenosť, veľkosť snímky
(v pixloch), distorzia (zakrivenie) a pod. Obe skupiny sú potrebné pri samotnom
výpočte 3D súradníc. Existujú rôzne spôsoby kalibrácie, ktoré sa líšia presnosťou
a výpočtovou zložitosťou [15, 16].

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 7
Štandardná metóda, ktorá sa používa na výpočet 3D súradníc detekovaných
bodov zo vstupných obrázkov vyžaduje poznať nasledujúce parametre:
- rozmery snímacieho poľa čipu kamery (CCD, CMOS)
- optickú vzdialenosť kamery: f (známy parameter kamery, alebo sa dá
zistiť pri kalibrácii)
- pozíciu zariadenia, ktoré premieta na objekt vzorku, vzhľadom na
súradnicový systém kamery
- rovnicu roviny (povrchu stola, podložky), na ktorej je objekt položený
Na kalibráciu kamery sa štandardne pužívajú špeciálne objekty - kalibračné
telesá., ktoré by mali spĺňať tri nasledujúce požiadavky:
- 3D súradnice kalibračného telesa musia byť známe s veľmi vysokou
presnosťou
- Ľahko identifikovateľné body na kalibračnom obrázku.
- Kalibračné body na objekte by mali pokrývať celý priestor ktorý bol
snímaný danou kamerou.
Ďalšou požiadavkou je nájsť páry (korešpondujúce body) na dvoch obrázkoch,
ktoré určujú jeden a ten istý bod v 3D priestore [17]. Táto časť problému je riešená
pomocou metód spracovania obrazu, keď sa na obrázkoch hľadajú charakteristické
črty (feature points) jednotlivých snímok (napr. rohy, hrany, iné značky). Problém sa
dá riešiť automaticky, poloautomatický (semiautomaticky), alebo manuálne.
Automatický prístup spočíva v použití len spomínaných metód spracovania obrazu,
keď sa na snímkach vyhľadávajú korešpondujúce rohy, hrany, obrysy okien a pod.
Manuálny prístup nám umožňuje označenie konkrétneho bodu (pixelu) na 2D snímku
na jednom a na druhom obrázku. Poloautomatický prístup používa obidve možnosti.
Nevýhodou manuálneho prístupu je užívateľská nepresnosť, keď užívateľ
musí označiť korešpondujúce body na jednom aj na druhom obrázku. Nevýhodou
automatického prístupu je zase to, že jednotlivé nájdené charakteristické prvky sa

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 8
nemusia vždy navzájom priradiť správne. Z tohto dôvodu sa niekedy objekt označuje
značkami, ktoré majú farbu ktorá sa v scéne prirodzene nevyskytuje a jej odstup od
ostatných farieb v scéne je dostatočný pre bezchybnú detekciu prahovaním.
Východiskom je použitie poloautomatického prístupu, ktorý umožní použitie
metód spracovania obrazu na nájdenie charakteristických čŕt a následnú korekciu zo
strany užívateľa, či sa tieto body priradili správne. nápomocné môže byť aj hľadanie
takýchto bodov v lokálnom meradle daného obrázku. Výsledkom tohto procesu je
mračno bodov (point cloud), reprezentujúce body snímaného objektu zo snímaného
smeru.
Aby sme získali informácie o povrchu celého snímaného povrchu, je nutné
vzájomne zložiť trojrozmerné plochy nasnímané z rôznych smerov do jediného
výsledného modelu. Proces takéhoto skladania sa označuje registrácia [18].
Metódy stereovízie majú problém nájsť korešpondujúce body v obrazoch
z nevýraznou textúrou a nevýraznými hranami. Napríklad fotografia jednofarebnej
steny z blízka, kedy v obraze nie sú zahrnuté jej hranice, má všetky body približne
rovnakej intenzity a počítač nie je schopný určiť korešpondentné body. Tento
nedostatok pasívneho snímania viacerými kamerami je možné odstrániť pomocou
aktívneho prvku – projekciou svetla [19]. Pre takéto obohatenie stereovízie postačuje
osvetliť snímaný objekt nehomogénnym svetlom. Siebert a Marshall [19] použili
projekciu zrnitého svetla na snímanie povrchu ľudského tela. Prípadom aktívnej
stereovízie, kde ide o projekciu svetla nie náhodnej, ale dobre známej štruktúry je
metóda štruktúrovaného svetla, ktorou sa zaoberá kapitola 2.1.8.
2.1.3 Metódy merania vzdialenosti (range scanners)
Metódy pre meranie vzdialenosti sú založené na meraní doby dopadu a odrazu
určitého „nosiča informácie“. Táto doba určuje za aký čas je konkrétny „nosič“
schopný odraziť sa späť, čím umožňuje zmerať vzdialenosť snímaného objektu od
daného zariadenia (ktoré „nosič“ vyslalo), pri známej rýchlosti nosiča [20].
Techniky sa delia podľa typu nosiča:
• radar používa na zistenie vzdialenosti rádiové vlny
• lidar (laserový radar) používa ako nosič svetlo
• sonar je založený na odraze zvuku (ultrazvuk)

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 9
Vzdialenostné mapy (Range images) získané týmto spôsobom merania môžu byť
reprezentované ako mračno bodov (angl. Cloud of points, množina 3D súradníc),
alebo ako hĺbková mapa (Depth image, 2,5 D depth map, matica výšok na definičnom
obore obrázku (x, y). Hĺbková mapa je špeciálna trieda digitálnych obrazov kde každý
pixel vyjadruje vzdialenosť medzi referenčnou priemetňou a viditeľným bodom v
priestore.
Radary, sonary a lidary využívajú emitovanie krátkych elektromagnetických
alebo akustických vĺn (impulzov) a oneskorenú detekciu návratu (echo) od snímaného
objektu.
2.1.4 Metódy vychádzajúce zo zmeny ohniska
Aktívne zaostrovanie
Mračná bodov sú získané z dvoch alebo viacerých obrázkov jednej scény,
získaných pri rôznych nastaveniach ohniskovej vzdialenosti. Informácia o treťom
rozmere vychádza z vedomosti, na akú vzdialenosť je systém zaostrený. Tento systém
sa využíva najmä v prípade veľkej numerickej apertúry optického systému,
najčastejšie v mikroskopii (vo variante konfokálnej mikroskopie).
Konfokálna mikroskopia
Konfokálna mikroskopia sa vyznačuje mnohými výhodami oproti obyčajnej
optickej mikroskopii. Ako zdroj svetla sa používa laser, resp. biele svetlo
prechádzajúce cez rotujúci disk so systémom apertúr. Konfokálna mikroskopia
dovoľuje získavať optické rezy v úzkej rovine zaostrenia. Svetlo ktoré prichádza
z tejto roviny je prepustené clonou s malým otvorom (pinhole), svetlo z iných rovín
zaostrenia sa na pinhole zachytí. Týmto spôsobom môžeme zosnímať z preparátu
viacero rovinných rezov z presne definovanej hĺbky. Následne je možné z týchto
rovín zložiť trojrozmerný model objektu. V prípade že sa použije femtosekundový
pulzný laser, je možné dosiahnuť dvojfotónovú excitáciu pozorovanej vzorky. Takáto
varianta konfokálnej mikroskopie nevyžaduje použitie pinholy a je technicky
pokrokovejšia. Nevýhodou systémov laserovej skenovacej mikroskopie je vysoká
cena.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 10
Okrem laserovej skenovacej konfokálnej mikroskopie Carl Zeiss
microimaging predstavil v r. 2003 ApoTome, nový 3D zobrazovací systém pre
obohacovanie kontrastu fluorescenčnej mikroskopie založený na technikách projekcie
mriežky, s využitím software AxioVision 4.1. Táto nová technika dovoľuje aby boli
optické rezy nasnímané rýchlo a s veľmi dobrou kvalitou. Mriežka ApoTome je
vložená do roviny irisovej clony fluorescenčného lúča mikroskopov Zeiss Axioplan 2
IE alebo Axiovert 200. Technológia ApoTome je založená na princípe projekcie
prúžkov. Obraz prúžkovanej mriežky je projekovaný do ohniskovej roviny vzorky.
Tento obraz je posúvaný do troch definovaných pozícií pomocou skenovacieho
mechanizmu. Digitálny obraz je snímaný pri každej pozícii mriežky, a nasnímané
obrázky sú kombinované do optických rezov zo zlepšeným kontrastom a vyšším
rozlíšením. Mriežkové štruktúry na výslednom obrázku nie sú viditeľné.
2.1.5 Metóda analýzy pohybu
Metóda používaná pri sekvencii obrázkov. Buď objekt sa pohybuje alebo sa
kamera pohybuje okolo objektu (napr. záznam na video). Metóda vychádza z faktu že
informácia sa na záznamovom médiu (kamere) mení len málo, resp. iba v určitých
smeroch. Preto je snaha o hľadanie korešpondenčných bodov v obrázkoch. Veľmi
dobré výsledky dosiahli skupiny Marca Pollefeysa [21] a Briana Curlessa [22]. Pre
túto metódu sa často používajú rôzne svetelné zdroje a rôzne typy kamier [23].
Trojrozmerným snímaním pier z videa, ako aj vytváraním fyzikálno-štatistického
modelu pre čítanie s pier sa zaoberali Basu et al [24].
2.1.6 Interferometrické metódy
Interferomerické techniky patria medzi veľmi presné a rýchle techniky merania
trojrozmernej formy povrchov. Ich rozlíšenie je dané v závislosti od vlnovej dĺžky
použitého svetla.
Na základe interferencie svetla pracuje optická koherenčná tomografia OCT.
Najčastejšie je ako jadro celého systému OCT použitý Michelsonov interferometer,
kde je jedno zrkadlo nahradené vzorkou a druhé je upevnené na mechanizmus s
krokovým motorčekom s veľmi jemným mechanizmom na presný posuv. Svetlo z
laserového zdroja (pre interferenciu musí byť zdroj koherentný) je rozkladané na

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 11
hranole na dva lúče, jeden sa odrazí od zrkadla, druhý zo vzorky. Na hranole sa spoja
a interferujú, vytvorený interferenčný obrazec sa sníma pomocou CCD poľa a
spracováva spätnou fourierovou transformáciou. Vzhľadom k tomu, že interferujú len
vlny s rovnakou fázou, získaný obraz je z vrstvy vo vzorke, ktorá má rovnako veľkú
optickú dráhu od hranola ako zrkadlo, ktoré možno posúvať. Z tohto dôvodu posuv
zrkadla má menšie kroky ako je vlnová dĺžka použitého svetla. Zrkadlá aj hranol
musia byť veľmi presné, nepresnosť porovnateľná z vlnovou dĺžkou svetla by viedla k
nepoužitelnosti zariadenia. Zo sady obrázkov s rôznou polohou referenčného zrkadla
(vlastne rezov cez vzorku) sa dá poskladať 3D obraz. Táto metóda je použiteľná
približne do hĺbky 1 - 2 cm, v závislosti od tkaniva. Aby nedochádzalo k poškodeniu
tkaniva používajú sa IR lasery (napr. YAG : Nd).
2.1.7 Kontaktné metódy
Pevné objekty môžu byť digitalizované pomocou CMM (coordinate
measurment machines), koordináty merajúcich zariadení. Senzor býva umiestnený na
pracovnom stole kde má možnosť pohybu v rámci dostatočného počtu stupňov
voľnosti. Senzor sa buď premiestňuje manuálne alebo je zariadenie vybavené
motorickým automatizovaným zariadením na pohyb. Väčšina CMM systémov sa
pohybuje pozdĺž ortogonálneho systému súradníc.
Dotykové metódy je limitovaná objemom, ktorý môže naraz byť snímaný. Je
vhodná len na malé a stredne veľké objekty. Táto metóda nie je vhodná pre snímanie
plastických alebo stlačiteľných telies, lebo môžu ľahko vzniknúť odchýlky. Náklady
na tento systém sú relatívne nízke. Nie nepodstatnou nevýhodou tohto systému je dlhý
čas potrebný pre získanie 3D dát, vzhľadom k tomu, že každý bod 3D povrchu treba
zadať manuálne.
Vzhľadom k veľkej presnosti a veľkému počtu bodov zosnímateľných naraz sa
používajú často mechanizmy CMM v dnešnej dobe ako polohovacie zariadenia pre
optické 3D skenery, čím sa zvyšuje rýchlosť, rozsah aj presnosť skenovania.
Práca [25] sa zaoberá telerobotickými systémami, teda systémami na ovládanie
robotických zariadení v priestore na diaľku. Takéto systémy zväčša využívajú
kontaktné snímače pre presný pohyb robota v priestore, ovládaný na diaľku,
najčastejšie robotické ramená.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 12
2.1.8 Štrukturované svetlo
Hlavnou limitáciou stereoskopie je problém korešpondencie, teda zhody
súhlasných bodov v rámci obrázkov. Za účelom riešenia tohto problému bola
vyvinutá technológia štruktúrovaného svetla. V systéme štruktúrovaného svetla, druhá
kamera je nahradená zdrojom svetla projekujúcim známy vzor na scénu, ako na Obr.
2. Keďže projektor môže byť pokladaný za kameru pracujúcu opačne, môže byť
modelovaný rovnakým spôsobom, ako kamera [1, 26, 27]. Korešpondenciou
s využitím štruktúrovaného svetla s rôznymi vzorami projekcie sa zaoberal Scharstein
a Szelinski [28]. Najčastejšie používanými obrazcami pre projekciu štruktúrovaného
svetla sú bod, úsečka, rôzne planárne obrazce, mriežka, koncentrické kruhy,
sínusoídy, farebné obrazce).
Optická triangulácia pomocou kamery a štruktúrovaného svetla je jednou z
najpopulárnejších optických metód snímania 3D povrchov. Tvarová informácia o
objekte sa získava z tvaru zosnímaného odrazeného zväzku svetla, ktorý bol
premietnutý na objekt (Obr. 2) [29, 30].
Obr. 2.: Snímanie obrazu pre tvorbu hĺbkovej mapy povrchu objektu na základe
štruktúrovaného svetla [31 ]
Najčastejšie sa ako premietací obrazec volí úsečka. Z jej deformácie ktorá je
spôsobená premietnutím na objekt, sa generujú trojrozmerné súradnice. Rekonštrukcia
celého povrchu snímaného objektu sa dá získať dvoma spôsobmi. Prvým je pohyb

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 13
telesa pod laserovým pásom. Táto metóda sa zvyčajne aplikuje ako rotácia telesa
o 360° v prípade malých telies. Druhým spôsobom je pohyb svetelného pásu okolo,
resp. pozdĺž objektu. Tento prípad je najčastejšie aplikovaný ako zmena natočenia
alebo posúvanie svetelného zdroja pozdĺž objektu.
V systéme štruktúrovaného svetla je hĺbka funkciou troch parametrov:
vzdialenosti zdroja svetla a kamery, uhla záberu kamery a uhla osvetlenia pomocou
svetelného zdroja. Pre vzdialenosť r môžeme napísať rovnicu:
r = F(i,j,α,β,B,...)
kde F je funkcia, často nelineárna, i a j reprezentujú pozíciu obrazového bodu
v koordinátach obrazu, α a β sú osvetlujúci uhol a uhol pohľadu kamery, B je
vzdialenosť medzi kamerou a zdrojom svetla [1].
Optimalizáciou veľkosti základne projekcie B, pre stereovíziu všeobecne sa
zaoberal Herbig [32]. Pri veľkej báze dochádza k veľkým oklúziám, pri malej báze je
znížená presnosť určenia hĺbky.
Typ zdroja svetla determinuje typ systému štruktúrovaného svetla. Tri metódy
osvetlenia sú: jediný bod (single point), projekcia úsečky (sheet-of-light), projekcia
rovinných vzorov (coded light) [1]. Od výberu metódy závisí rýchlosť snímania.
Najrýchlejšie snímanie sa dosahuje pomocou premietania rovinných obrazcov. Pri
použití štruktúrovaného svetla vyvstáva niekoľko problémov. Prvým z nich je
oklúzny problém (occlusion problem). Oklúzie, ako aj u iných zobrazovacích
systémoch, vznikajú vtedy, keď povrch objektu je prekáža pohľadu na iný povrch
toho istého objektu. Riešením tohto problému je snímanie objektu z viacerých strán,
čím sa nasníma celý povrch. Týmto spôsobom získame oveľa viac dát a okrem toho
každý uhol pohľadu má svoj vlastný systém koordinát. Teda vzniká otázka registrácie,
ako uložiť lokálne mriežky koordinát pre každý uhol pohľadu do jedného systému
koordinát. Registrácia je proces, pri ktorom sa viacero uhlov pohľadu asociovaných
s vlastnými systémami koordinát uloží do jednej globálnej mriežky koordinát.
Podstatou registrácie je rigidná transformácia vstupných dát. Rigidná transformácia je
definovaná ako
y = Rx + t
kde R reprezentuje rotačnú maticu, t translačný vektor, x bod v koordinátach
kamery a y bod v koordinátach výsledného obrazu [1]. Registrácia zahŕňa nájdenie R
a t. Je mnoho algoritmov registrácie [18], najznámejší z nich je ICP algoritmus (angl.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 14
Interactive Closest Point) [1, 33, 34, 35]. Po registrácii častí virtuálneho modelu zo
všetkých uhlov pohľadu je potrebné ešte tieto registrované komponenty zložiť do
jednej konzistnentnej reprezentácie povrchu. Je viacero metód integrácie takýchto
povrchových modelov, ktoré je možné rozdeliť do dvoch skupín, v závislosti od toho
či ich vstupom je mračno bodov (cloud of points) alebo sada povrchov (set of
surfaces)[1]. Jednou z najväčších obtiažností pri vytváraní kompletného povrchu
telesa je zistiť, koľko snímok je potrebných a z ktorých smerov [36]. Snažíme sa mať
objekt nasnímaný z každého možného smeru. Liska a Sablating [37] sa zaoberali
vývojom systému, ktorý z nasnímaného snímku dopredu určuje pravdepodobne
najlepšiu pozíciu kamery pre ďalší záber.
Metódami indexovania pruhov štruktúrovaného nekódovaného svetla sa
zaoberal Robinson et al [38]. Pravouhlá mriežka nenesie kód, ktorý by udával číslo
každej čiary v poradí (nekódované štruktúrované svetlo). Vďaka tomu, že je tu veľa
čiar veľmi blízko seba, individuálna identifikácia čiary je skoro nemožná. No
vzhľadom k pseudo-ortografickej projekcii [39], táto informácia nevyhnutná pre
tradičnú trianguláciu, nie je potrebná, ak je známy uhol medzi smerom projekcie
a uhlom pohľadu kamery [40].
Pri projekcii viditeľného štruktúrovaného svetla dochádza k strate alebo
nežiadúcemu ovplyvneniu textúrových a farebných informácií. Aby bolo možné
využiť výhody štruktúrovaného svetla a pritom sa vyhnúť strate týchto informácií,
vznikli metódy neviditeľného štruktúrovaného svetla. Existuje viacero metód
neviditeľného štruktúrovaného svetla, ktoré možno zaradiť do kategórií [41]:
- Infračervené štruktúrované svetlo (IRSL InfraRed Structured Light), pri
ktorom dochádza k projekcii laserového infračerveného svetla, sníma sa
senzorom citlivým na infračervené svetlo.
- Nevnímateľné štruktúrované svetlo (ISL Imperceptible Structured Light),
Objekt je pri tejto metóde vysokou frekvenciou (nevnímateľnou) osvetlovaný
striedavo vzorom štruktúrovaného svetla a následne komplementárnym
vzorom (inverzným). Sníma sa dvoma kamerami, jedna sníma textúru, druhá
je synchronizovaná s projekciou štruktúrovaného svetla.
- Filtorované štruktúrované svetlo (FSL Filtered Structured Light), je veľmi
podobné IRSL, ide o projekciu svetla z projektora cez filter prepúšťajúci len
infračervenú zložku, často sa projekovaný vzor mení počas projekcie.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 15
Využitím štruktúrovaného svetla pre rozoznávanie kónických povrchov pre
kalibráciu, ako aj pre vypočítanie osí kónických súčiastok na základe informácií
o povrchu sa zaoberal Chia [42].
Kalibrácia a vyhľadávanie korešpondencií je prevádzané podobným spôsobom
ako u stereo kamier – pomocou známeho kalibračného telesa. Chen a Li vyvinuli aj
iný spôsob kalibrácie, na základe vnútorných parametrov kamery [15]. Výhodou tejto
metódy je možnosť odprahovania svetelného pásu od pozadia a následná ľahšia
identifikácia jeho charakteristických čŕt, nevýhodou veľké množstvo snímaných
obrázkov. Jednou z výhod metódy použitia štruktúrovaného svetla je aj fakt, že
pridáva charakteristické body na inak nevhodné objekty (hladké objekty, nevhodné
materiály a pod.). Metódy s použitím štruktúrovaného svetla sa osvedčili napr. pri
snímaní tvárí a biometrických meraniach (ShapeSnatcher od firmy Eyetronic).
Pri snímaní sa dá využiť aj rôznofarebná mriežka, napr. pomocou projektora
[43]. Pri použití štruktúrovaného svetla s farbou z oblasti farieb snímaného svetelného
spektra nutne dochádza k stratám informácií o textúre povrchu snímaného objektu.
Preto je vhodné nasnímať jeden obrázok osvetlený štruktúrovaným svetlom, druhý
normálnym svetlom. Druhú snímku potom možno použiť na vytvorenie textúry 3D
telesa, napr. pomocou programu Shape Snatcher (Eyetronics). Ďaľšou možnosťou je
nasnímať dva alebo viac obrazov s rôzne posunutou mriežkou z tej istej pozície,
následne sa tieto obrázky upravia registráciou, prahovaním a spriemerovaním do
výsledného 3D obrázku bez straty textúry.
Scéna pri snímaní obrazu osvetleného štruktúrovaným svetlom by mala byť
zatemnená, resp. projektor štruktúrovaného svetla musí mať vysokú intenzitu, aby sa
zachoval odstup signálu od šumu [44].
Po zosnímaní obrázku je potrebné rozoznávanie obrazca štrukturovaného svetla.
Nasvietený obrazec (mriežka) musí byť rozoznaný na získanej snímke, aby bolo
možné rekonštruovať 3D objekt. Tento proces závisí od vzoru svetla, často sa používa
pravouhlá mriežka. Preto nie je problém mriežku detekovať na hladkých povrchoch.
Problém však vzniká na ostrých hranách, na ktorých je obtiažne detekovať ich presnú
polohu, vzhľadom k reálnym rozmerom mriežky. Okrem nepresnosti pri spracovaní
ostrých hrán môže vzniknúť aj ďalší problém. Môže sa stať že počítač nesprávne
interpretuje hranu na konkávnom telese ako hranu na konvexnom telese. Tento
problém vzniká hlavne vtedy, ak je zdroj svetla veľmi blízko kamery, pri kolmom

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 16
dopade svetla na hranu. Ďalším problémom môže byť, ak textúra telesa je podobná
štruktúrovanému svetlu a počítač nie je schopný rozlíšiť medzi textúrou povrchu
a štruktúrovaným svetlom. Tento problém sa rieši, pokiaľ je o možné zafarbením
telesa pomocou bielej matnej farby. Rovnakým spôsobom je možné riešiť aj problém
so snímaním reflektujúcich alebo transparentných povrchov.
Moiré interferometria, je de-facto jednou z metód 3D skenovania za pomoci
štruktúrovaného svetla. Pomocou mriežky medzi objektom a snímaným objektom
vzniká situácia podobná ako pri štruktúrovanom svetle, zmena oproti tejto metóde je
v tom že ďalšia mriežka sa vkladá medzi objekt a fotoaparát (kameru), a dva tiene
mriežok navzájom interferujú. Z interferenčného obrazca sa dá následne zistiť
zakrivenie telesa, jednou z alternatívnych metód spracovania 3D modelu zo snímky so
štruktúrovaným svetlom je využitie virtuálnej moiré interferometrie – druhá mriežka
je len súčasť programu pre spracovanie 3D informácie.
Pozitívnym aspektom 3D skenovania pomocou projekcie štruktúrovaného
svetla je bezpečnosť, pokiaľ využíva ako zdroj biele svetlo a nie laserový zdroj.
Proces snímania je veľmi rýchly, trvá len zopár sekúnd. Táto skutočnosť je
veľkou výhodou pri snímaní dynamických objektov (napr. tvárí), keďže objekt musí
zostať nehybný len zopár sekúnd.
Negatívnym aspektom je, že objekt musí byť osvetlený projekovaným svetlom,
a neosvetlené miesta (tiene) nebudú zaznamenané. Taktiež v miestnosti, kde sa sníma
by mala byť nízka intenzita osvetlenia. Veľmi veľké objekty musia byť skenované po
malých častiach.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 17
2.2 Experimentálne metódy rýchleho prototypovania
Pojem rýchle prototypovanie RP (rapid prototyping) označuje skupinu
technológii, ktoré automaticky konštruujú fyzické modely priamo z údajov počítačom
podporoveného dizajnu (CAD copmputer aided design). Tieto „trojrozmerné
tlačiarne“ dovoľujú dizajnérom rýchlu tvorbu hmotných prototypov, ktoré majú
mnoho výhod oproti dvojrozmerným obrazom. Trojrozmerné modely majú
nespočetné množstvo rôznych možných použití. Sú vynikajúcimi pomôckami pri
komunikácii o návrhoch so spolupracovníkmi alebo zákazníkmi. Ďalej môžu byť
priamo využité na testovanie dizajnu. Napríklad letecký inžinieri môžu postaviť
model profilu do veterného tunela a merať sily vztlaku a odporu. Dizajnéri vždy
používali prototypy, metódy RP im dovoľujú ich vytvárať rýchlejšie a
ekonomickejšie.
Navyše k prototypovaniu, techniky RP môžu byť tiež použité na obrábanie
(rapid tooling) a tiež výrobu súčiastok vysokej kvality (rapid manufacturing). Pre
malú produkciu komplikovaných objektov je rýchle prototypovanie často najlepšou
dostupnou technológiou.
Prirodzene, „rýchle“ je relatívny pojem. Väčšina prototypov potrebuje tri hodiny
až tri dni na vytvorenie kompletného modelu, v závislosti od objemu a zložitosti
modelu. Na prvý pohľad to môže vyzerať pomalé, no je to oveľa rýchlejšie ako
týždne alebo mesiace potrebné na výrobu prototypov tradičnými spôsobmi obrábania.
Tento zisk času dovoľuje výrobcom priniesť produkty na trh rýchlejšie a lacnejšie. V
roku 1994 Pratt & Whintney dospeli k 70 až 90 percentnej redukcii nákladov
a potrebného času, pomocou investícií do začlenenia rýchleho prototypovania do
vývoja.
Komerčne je dostupných viac ako 6 rôznych metód rýchleho prototypovania,
z ktorých každá má jedinečné výhody. Keďže technológie rýchleho prototypovania
sú stále viac používané aj v aplikáciach, kde nejde o prototypovanie, často sa tieto
technológie nazývajú aj Solid Free-form Fabrication SFF (trojrozmerná neformátová
výroba), computer automated manufacturing CAM, alebo Layered Manufacturing LM
(tvorba po vrstvách). Posledný výraz - LM je čiastočne opisný pre všetky komerčné
technológie RP.
Programový balík „nakrája“ CAD model na mnohé tenké (asi 0,1 mm) vrstvy,
ktoré sú potom vytvárané jedna nad druhou. Výroba po vrstvách je „aditívny proces“,
Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 18
používajúci často vrstvy plastov, papiera, vosku, alebo kovové fólie na výrobu
objektu. Naopak väčšina obrábacích techník (frézovanie, vŕtanie, brúsenie a pod.) sú
„substraktívne“ procesy ktoré odoberajú materiál z pevného bloku. Aditívna podstata
dovoľuje vytvárať objekty s komplikovaným vnútorným vzhľadom, ktorý nie je
možné vyrobiť inými spôsobmi.
Pochopiteľne, rýchle prototypovanie nie je dokonalé. Rozmery vytvoreného
objektu sú väčšinou limitované na 0,125 kubických metrov alebo menej, v závislosti
od RP stroja. V nami používanom stereolitografe LS 250 je tento objem 250mm x
250mm x 250mm.
Je náročné priamo vytvárať kovové časti, no k vyriešeniu týchto problémov
zrejme dôjde v blízkej budúcnosti. Pre kovové objekty, vyrábané vo veľkých
množstvách a jednoduché objekty sú väčšinou ekonomickejšie konvenčné spôsoby
výroby. Napriek obmedzeniam RP je význačnou technológiou, ktorá spôsobila
revolúciu v oblasti výrobného procesu.
2.2.1 Základné postupy
Napriek tomu, že existuje mnoho rozmanitých techník rýchleho prototypovania,
všetky, ktoré sa zaoberajú výrobou po vrstvách obsahujú týchto 5 základných krokov:
1. Vytvorenie CAD modelu dizajnu
V princípe môže byť CAD model vytvorený ľubovoľnou z metód priameho
alebo reverzného inžinierstva. Vstupnými dátami môžu byť hĺbkové mapy alebo
mračná bodov, pri priamom inžinierstve býva často model reprezentovaný
parametrickými krivkami [45].
2. Konverzia CAD modelu do STL formátu
Aj keď bol STL (Standard Triangulation Language) formát dát vyvinutý
špecificky pre stereolitografiu, stal sa priemyselným štandardom pre transfer dát pre
systémy plánujúce proces RP [46]. V budúcnosti je snaha zaviesť namiesto STL dáta
vo formáte STEP (podľa normy ISO 10303). V trojuholníkovej sieti STL dochádza
totiž k stratám informácií o geometrii parametrických povrchov ich kvantizovaním.
Taktiež narastajú problémy STL formátu pre kompozitné technológie RP, prípadne

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 19
farebné metódy stereolitografie [47]. STL dáta (binárne alebo ASCII) sú tvorené
koordinátami vrcholov trojuholníkov a normálovým vektorom každého trojuholníka
[48].
3. Tvorba rezov STL súboru
V tomto kroku dochádza k vytvoreniu počítačovej reprezentácie každej
vytváranej vrstvy, ktorej hrúbka závisí od použitej technológie. Vzhľadom k tomu že
prechody medzi nasledujúcimi vrstvami sú stupňovité (angl. Stair stepping effect), je
často dôležité zvoliť vhodný smer orientácie modelu pre zvýšenie presnosti jeho
povrchu [49] .
4. Konštrukcia fyzického modelu po vrstvách
Obraz vrstvy pre stereolitografiu je tvorený obrazom kontúry, a obrazom
vnútorného štáfovania (angl. hatching). Najprv sa v procese vytvrdzovania vytvrdzujú
kontúry, následne je vyšráfovaná plocha pevnej časti modelu.
5. Čistenie a dohotovenie modelu (post-curing, post-processing)
Vytvorený model je nutné očistiť a v závislosti od typu RP technológie zbaviť
podporných štruktúr. Pri mnohých technológiách je model nutné zakonzetvovať.
Modely sa často obrusujú, vŕtajú, frézujú alebo pieskujú pre zlepšenie vlastností
povrchu. K post-processingu niektorých technológií patrí aj morenie, prípadne náter
modelu.
V dnešnej dobe existuje viac ako 20 druhov technológii rýchleho prototypovania
a ich hybridných variant. Najčastejšie sa používa 6 typov RP strojov:
2.2.2 Laminated object manufacturing (LOM) Touto technológiou vyvinutou vo firme Helisys, sa vrstvy adhezívne pokrytého
materiálu lepia navzájom aby utvorili prototyp. Pôvodným materiálom bol papier
laminovaný tepelne aktivovaným lepidlom a navinutý na cievkach. Posuvno-zberací
(feeder/collector) mechanizmus posúva papier nad platformu, kde sa vytvorila
základňa z papiera a obojstrannej penovej pásky. V ďaľšom sa zohriatym valcom
aplikuje tlak na zlepenie papiera so základňou. Fokusovaný laser vyreže okraje prvej
vrstvy a potom vyreže skrížené rezy (mriežku) do zostávajúceho materiálu (negatívny
priestor prototypu). Tieto rezy do kríža porušia zostávajúci materiál aby sa dal neskôr

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 20
ľahko odstrániť. Počas tvorby je tento materiál vynikajúcou podporou pre prevísajúce
a tenkostenné časti modelu. Následne platforma klesne a nad ňu sa posunie ďalší
materiál. Platforma sa zvýši kúsok nižšie ako bola pôvodne, Valec nalepí ďalšiu
vrstvu na predošlú a laser vyreže nasledujúcu vrstvu. Tento proces sa opakuje až do
vytvorenia modelu, ktorý má textúru podobnú drevu. Ak sú modely vyrobené
z papiera, musia byť zatmelené a nalakované, alebo impregnované aby sa zabránilo
poškodeniu zvlhnutím.
2.2.3 Selective laser sintering (SLS) SLS vyvinul Carl Deckard pre svoju diplomovú prácu na Texasskej Univerzite.
Patentované bolo roku 1989. SLS používa laserový lúč na selektívnu fúziu
práškového materiálu, akým je nylon, elastomer, alebo kov. Takto vzniká pevný
objekt. Objekty sú vytvárané nad platformou, ktorá je pod povrchom v nádobe
s tepelne spojiteľným práškom. Laser rysuje tvar prvej vrstvy, pričom z roztaveného
materiálu vznikajú po schladnutí aglomeráty. Platforma následne klesne o hrúbku
jednej vrstvy a na povrch sa znovu aplikuje prášok. Toto sa opakuje až do vytvorenia
kopmletného objektu. Zvyšný prášok každej vrstvy pomáha udržať model počas
tvorby na správnej pozícii. SLS zariadení produkuje napr DTM Austin, TX.
2.2.4 Fused deposition Modeling (FDM) Pri tejto technológii, sa vlákna zohriateho termoplastu pretláčajú cez hrot
(dýzu), ktorá sa pohybuje v smeroch osí x a y. Podobne ako kuchár pri ozdobe
medovníkov, kontrolovanou extrúziou spadajú usadeniny materiálu na stavebnú
platformu aby vytvorili prvú vrstvu. Platforma sa udržiava na nižšej teplote, takže
termoplast rýchlo tuhne. Kaď platforma klesne, hlava s dýzou vytlačí ďalšiu vrstvu na
predošlú. Už od začiatku sa vytvárajú podporné časti ktoré sú buď z iného materiálu,
alebo majú perforované spojenia.
2.2.5 Solid ground curing (SGC) Vyvinuté v Cubital, je veľmi podobné stereolitografii, v tom, že tiež používa
UV svetlo na selektívne stvrdenie fotosenzitívnych polymérov. Na rozdiel od
stereolitografie, SGC osvetľuje celú vrstvu naraz. Najprv sa fotosenzitívna živica
nastrieka na platformu. Následne prístroj vytvorí fotomasku (ako šablónu) vrstvy,

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 21
ktorá sa má vytvoriť. Táto fotomaska je vytlačená na sklenenej tabuli nad platformou,
použitím elektrostatickej metódy analogickej k metóde, ktorú používajú fotokopírky
(Xerox). Maska je potom osvetlená UV svetlom, ktoré sa dostane iba cez priesvitné
časti masky, aby selektívne vytvrdilo tvar vrstvy. Keď je vrstva vytvrdená, stroj
vysaje zvyšnú tekutú živicu a nasprejuje vosk na jej miesto, aby držal model počas
tvorby v správnej pozícii. Vrchná vrstva sa zvalcuje do hladka a proces sa opakuje
tvorbou ďalšej vrstvy. Keď je model hotový, musí sa zbaviť vosku ponorením do
rozpúšťadla.
2.2.6 3D Ink-Jet Printring Ink-Jet printing označuje celú skupinu zariadení, ktoré používajú ink-jet
technológiu. Prvá bola 3D tlač (3D Printing 3DP) vyvinutá v MIT, licencovaná
Soligen Corporation, Extrude Hone a inými.
Modely sú vyrábané nad platformou umiestnenou v nádobe plnej práškového
materiálu. Ink-jet tlačová hlava selektívne vytláča lepiacu tekutinu na spevnenie
a zlepenie prášku. Nezlepený prášok zostáva ako podpora pre rastúci model.
Platforma následne klesá, pridá sa vrstva prášku, ktorá sa vyhladí a proces sa opakuje.
Po skončení sa objekt vyberie z neviazaného prášku a zostávajúci neviazaný prášok sa
odfúkne. Takto vytvorené objekty je možné nechať presiaknuť voskom, CA lepidlom,
alebo zatmeliť kôli zvýšeniu trvácnosti a povrchovej úprave. Typická hrúbka vrstvy je
rádovo 0.1 mm. Tento proces je veľmi rýchly a produkuje povrchy z jemne zrnitým
povrchom. Zcorp používa dva rozličné materiály, prášok na báze škrobu (nie veľmi
pevný ale model je možné vypáliť pre aplikácie skúmania modelu) a keramický
púder. Sú dostupné zariadenia pre 4-farebnú tlač.
Verzia ink-jet tlačiarne od 3D systems používa lineárne usporiadenie tlačových
hláv na rýchlu tvorbu termoplastických modelov. Ak je model dosť úzky, tlačová
hlava môže vytlačiť celú vrstvu na jeden prechod. V inom prípade urobí niekoľko
prechodov.
Sanders Protorype of Wilton, používa inú ink-jet techniku vo svojich
zariadeniach rady Model Maker. Tieto stroje používajú dve tlačové hlavy. Jedna tlačí
termoplast s nízkou teplotou topenia na výrobu modelu, pokým druhá hlava tlačí vosk
na tvorbu podporiek. Po každej vrstve nôž zrovná vrchný povrch na rovnakú hrúbku.
Týmto spôsobom sa dosahuje veľmi dobrá presnosť, dovolujúca zariadeniam
pracovať v šperkárskom priemysle.
Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 22
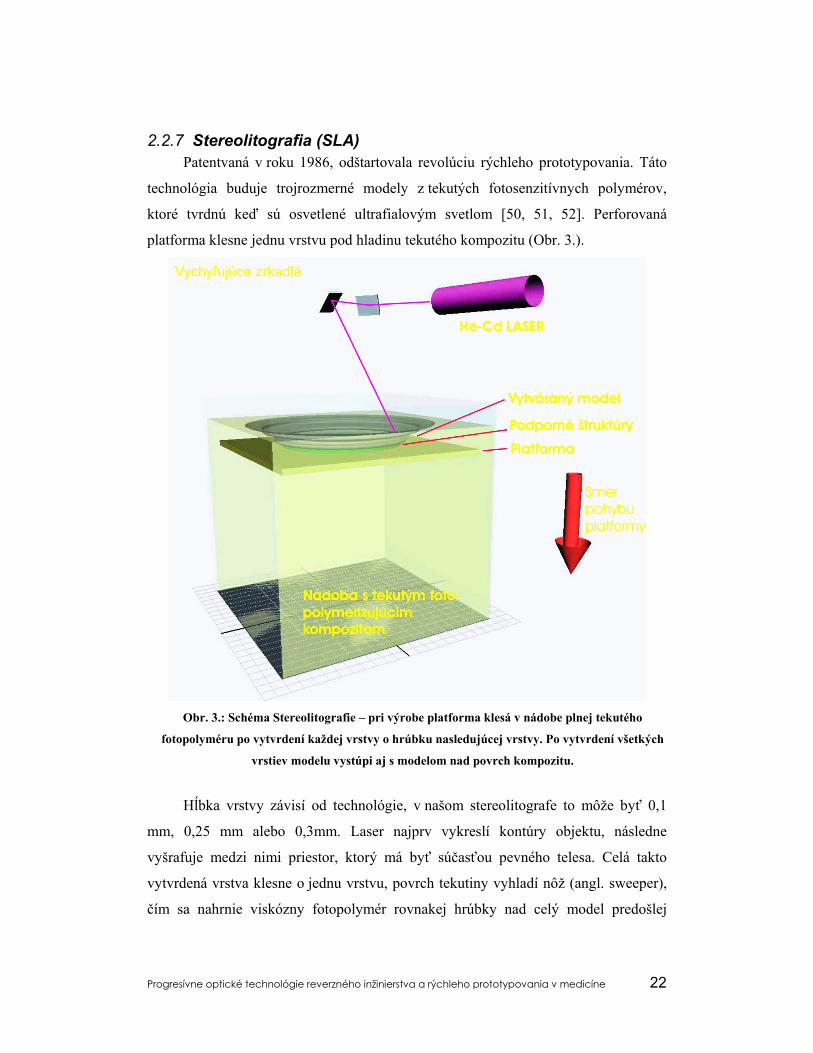
2.2.7 Stereolitografia (SLA) Patentvaná v roku 1986, odštartovala revolúciu rýchleho prototypovania. Táto
technológia buduje trojrozmerné modely z tekutých fotosenzitívnych polymérov,
ktoré tvrdnú keď sú osvetlené ultrafialovým svetlom [50, 51, 52]. Perforovaná
platforma klesne jednu vrstvu pod hladinu tekutého kompozitu (Obr. 3.).
Obr. 3.: Schéma Stereolitografie – pri výrobe platforma klesá v nádobe plnej tekutého
fotopolyméru po vytvrdení každej vrstvy o hrúbku nasledujúcej vrstvy. Po vytvrdení všetkých
vrstiev modelu vystúpi aj s modelom nad povrch kompozitu.
Hĺbka vrstvy závisí od technológie, v našom stereolitografe to môže byť 0,1
mm, 0,25 mm alebo 0,3mm. Laser najprv vykreslí kontúry objektu, následne
vyšrafuje medzi nimi priestor, ktorý má byť súčasťou pevného telesa. Celá takto
vytvrdená vrstva klesne o jednu vrstvu, povrch tekutiny vyhladí nôž (angl. sweeper),
čím sa nahrnie viskózny fotopolymér rovnakej hrúbky nad celý model predošlej

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 23
vrstvy aj v prípade, že má táto vrstva veľký povrch, následne sa proces vytvrdzovania
vrstvy opakuje až po poslednú vrstvu [51].
Fuh et al [53] opisoval fotopolymerizáciu (vytváranie polymérov spájaním
monomérov, iniciované vystavením monomérov účinkom svetelného žiarenia)
materiálov pre rýchle prototypovanie. Pozostáva z troch krokov: iniciácie, propagácie
a terminácie. Fotopolymerizácia je exotermický proces, a teda sa pri nej uvoľňuje
energia. Toto uvoľňovanie energie dovoľuje používať nízkovýkonové UV lasery
v rýchlom prototypovaní. Pri vystavení UV žiareniu vznikajú voľné radikály (R*)
z foto-iniciátoru (I) osvetleného vhodným svetlom istej frekvencie. Voľné radikály
reagujú z monomérmi (M) a iniciujú polymerizačnú reakciu:
I+hν→2R*
R*+M→(R-M)*
Kde hν je energia dodávajúceho fotónu. V prechode zo slabých Van der Waalsových
síl medzi molekulami monoméru na sieť kovalentných väzieb polyméru (často
trojrozmernú [51]) sa menia celkové vlastnosti materiálu. Priemerná vzdialenosť
medzi skupinami atómov sa zmenšuje, čo spôsobuje zmenu hustoty (zmrašťovanie).
Mení sa pevnosť materiálu, ktorý prechádza z kvapalnej fázy do tuhej.
Epoxidové kompozity fotopolymerizujú trochu odlišne ako akrylárové
fotopolyméry [51]. U akrylátov prebieha radikálová fotopolymerizácia:
V epoxidových kompozitoch je to katonická fotopolymerizácia, obdobná
reakcia, kde namiesto radikálu ako iniciátor pôsobí katión (napr. protón), viaže sa na
ketonickú skupinu epoxidu za vzniku katiónu, ktorý môže spúšťať ďalší krok reakcie:
Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 24
Rozdiely týchto fotopolymerizačných procesov možno zhrnúť nasledovne [3]:
Radikálová fotopolymerizácia
(Akrylát)
Katonická fotopolymerizácia
(Epoxid)
Rýchlosť reakcie Vysoká Nízka
Inhibícia kyslíkom Áno Nie
Inhibícia vlhkosťou Nie Áno
Polymerizácia za tmy Nie Áno
Exotermia Nízka Vysoká
K zmrašťovaniu dochádza pri laserovom vytvrdzovaní vrstvy za vrstvou. Pri
stereolitografii máme množstvo nad sebou uložených vrstiev rovnakej hrúbky.
Vzhľadom k neskoršej polymerizácii vyšších vrstiev a ich zmrašťovaniu na povrchu
už spolymerizovanej vrstvy, dochádza k vzniku vnútorných napätí, ktoré môžu viesť
k deformácii materiálu modelov a tiež zvyšujú riziko vzniku trhlín.
Gunnars a Wiklund [54] použili merania zakrivení dvojvrstvových systémov
z vrstiev porovnateľnej hrúbky na vytvorenie modelu pre určovanie vnútorných napätí
a Youngovho modulu pružnosti.
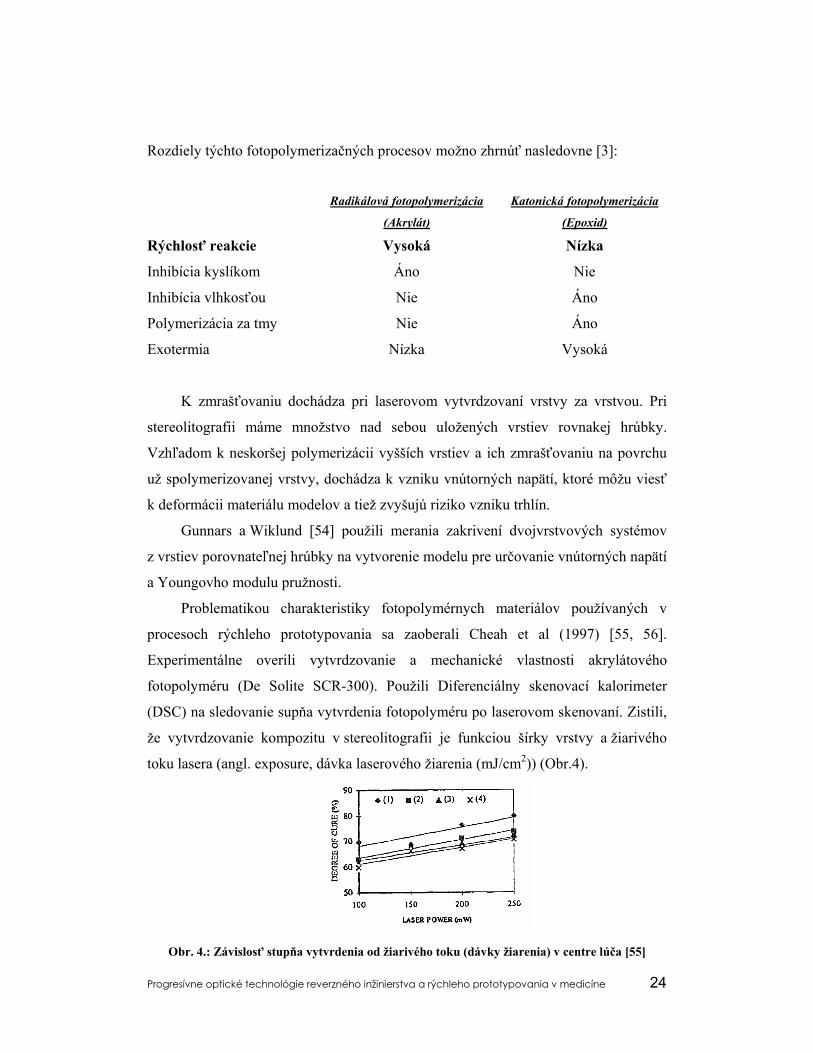
Problematikou charakteristiky fotopolymérnych materiálov používaných v
procesoch rýchleho prototypovania sa zaoberali Cheah et al (1997) [55, 56].
Experimentálne overili vytvrdzovanie a mechanické vlastnosti akrylátového
fotopolyméru (De Solite SCR-300). Použili Diferenciálny skenovací kalorimeter
(DSC) na sledovanie supňa vytvrdenia fotopolyméru po laserovom skenovaní. Zistili,
že vytvrdzovanie kompozitu v stereolitografii je funkciou šírky vrstvy a žiarivého
toku lasera (angl. exposure, dávka laserového žiarenia (mJ/cm2)) (Obr.4).
Obr. 4.: Závislosť stupňa vytvrdenia od žiarivého toku (dávky žiarenia) v centre lúča [55]
Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 25
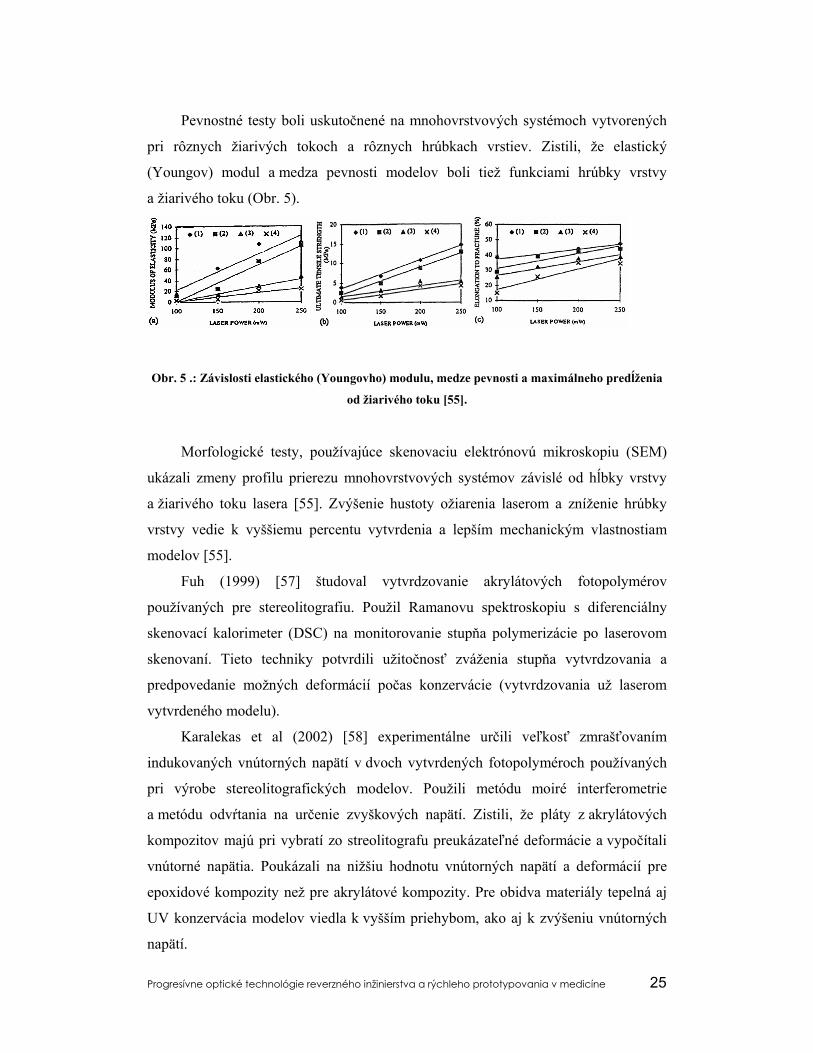
Pevnostné testy boli uskutočnené na mnohovrstvových systémoch vytvorených
pri rôznych žiarivých tokoch a rôznych hrúbkach vrstiev. Zistili, že elastický
(Youngov) modul a medza pevnosti modelov boli tiež funkciami hrúbky vrstvy
a žiarivého toku (Obr. 5).
Obr. 5 .: Závislosti elastického (Youngovho) modulu, medze pevnosti a maximálneho predĺženia
od žiarivého toku [55].
Morfologické testy, používajúce skenovaciu elektrónovú mikroskopiu (SEM)
ukázali zmeny profilu prierezu mnohovrstvových systémov závislé od hĺbky vrstvy
a žiarivého toku lasera [55]. Zvýšenie hustoty ožiarenia laserom a zníženie hrúbky
vrstvy vedie k vyššiemu percentu vytvrdenia a lepším mechanickým vlastnostiam
modelov [55].
Fuh (1999) [57] študoval vytvrdzovanie akrylátových fotopolymérov
používaných pre stereolitografiu. Použil Ramanovu spektroskopiu s diferenciálny
skenovací kalorimeter (DSC) na monitorovanie stupňa polymerizácie po laserovom
skenovaní. Tieto techniky potvrdili užitočnosť zváženia stupňa vytvrdzovania a
predpovedanie možných deformácií počas konzervácie (vytvrdzovania už laserom
vytvrdeného modelu).
Karalekas et al (2002) [58] experimentálne určili veľkosť zmrašťovaním
indukovaných vnútorných napätí v dvoch vytvrdených fotopolyméroch používaných
pri výrobe stereolitografických modelov. Použili metódu moiré interferometrie
a metódu odvŕtania na určenie zvyškových napätí. Zistili, že pláty z akrylátových
kompozitov majú pri vybratí zo streolitografu preukázateľné deformácie a vypočítali
vnútorné napätia. Poukázali na nižšiu hodnotu vnútorných napätí a deformácií pre
epoxidové kompozity než pre akrylátové kompozity. Pre obidva materiály tepelná aj
UV konzervácia modelov viedla k vyšším priehybom, ako aj k zvýšeniu vnútorných
napätí.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 26
Karalekas et al (2003) [59] využil experimenty spolu s teoretickou analýzou
založenou na teórii elastických vrstiev, na určenie veľkosti výsledných zvyškových
napätí v laserom vytvrdenom akrylátovom fotopolyméri. Použil dvojvrstvové
štvorcové modely rovnakých rozmerov, ktoré následne nechali kompletne
spolymerizovať pôsobením UV svetla a tepelne. Výsledný priehyb bol snímaný
pomocou moiré metódy projekcie tieňa mriežky a zosnímaný ako interferenčné čiary
moiré interferometrie. Nameraný priehyb bol korelovaný s teoreticky vypočítanými
hodnotami vnútorných napätí. Jednoduchá experimentálna metodológia potvrdila jeho
teóriu ako vhodnú na výskum charakteristík deformácií fotopolymérov používaných
pre stereolitografiu. Taktiež ukázal, že testovacie modely vytvrdzované po
stereolitografii UV svetlom vykazovali uniformné priehyby, zatiaľ čo tepelné
vytvrdzovanie spôsobuje vyššie vnútorné napätia.
Karalekas et al (2003) [60] poukázal na vyšší Youngov modul ako aj medzu
pevnosti stereolitografických modelov, ktoré boli vytvorené technológiou, pri ktorej
sa medzi vrstvy polyméru vkladali sklenené vlákna.
Deformácie a vnútorné napätia je potrebné v procesoch rýchleho prototypovania
zvažovať v každom kroku, nie len pri výrobe samotných prototypov. Harris (2004)
[61] pozoroval zmrašťovanie odliatkov z nylonu PA66, ktorého rozsah zmrašťovania
je 1 až 2,2 %. Experimentálne overil, že odliatky do foriem vyrobených z hliníka,
vykazovali minimálne zmrašťovanie, zatiaľ čo odliatky do foriem priamo
vytvorených stereolitografiou boli vyššie ako maximum predpokladaného rozsahu.
K tomuto dochádza v kryštalizujúcich polyméroch vďaka inému stupňu kryštalizácie,
ktorého príčinou je iná rýchlosť ochladzovania modelu.
Najčastejšie dnes používané materiály pre rýchle prototypovanie sú
fotopolymerizujúce kompozity (tekuté živice). Tieto materiály vykazujú
zmrašťovanie pri zmene z kvapaliny na pevnú látku počas vytvrdzovania materiálu po
vrstvách.
Prototypy vytvorené stereolitografiou obsahujú všeobecne istý stupeň
nehomogenít vo svojej štruktúre. Toto je dôsledkom nespolymerizovaného alebo len
z časti spolymerizovaného kompozitu uzatvoreného medzi vrstvami počas vytvárania
modelu po vrstvách (Obr. 6).

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 27
Obr. 6. Schéma dvoch laserom vytvrdených vrstiev s náčrtom ťahových a tlakových napätí[56]
Príčinou takejto štruktúry je intenzitný profil laserového lúča používaného v
stereolitografe (Obr. 7) a taktiež chemické vlastnosti fotosenzitívnych kompozitov.
Obr. 7. : Normalizovaný intenzitný profil laserového lúča [ 51 ], stmavenie fotografick0ho
papiera stereolitografickým laserom [51], profil laserového lúča určujúci vytvrdený objem [ 55]
Okrem tvaru lúča je dôležitý aj smer šrafovania (angl. hatching) od ktorého
závisí prekryv nasledujúcich vrstiev ako aj ich stupeň spolymerizovania.
Optimalizácia algoritmov výpočtu smeru šrafovania je dôležitou úlohou väčšiny
metód rýchleho prototypovania [62].
Fotopolymerizácia je vysoko exotermický proces, teplo sa uvoľňuje z
kompozitnej živice počas jej polymerizácie, kompletná vrstva však nie je
spolymerizovaná v celom objeme modelu ihneď po fotopolymerizácii laserom
v stereolitografe.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 28
Zvýšenie žiarivého toku lasera, ako aj zníženie rozostupu vrstiev, vedie k
lepšie spolymerizovanej štruktúre a k zvýšeniu stupňa vytvrdenia [55, 51]. Pre
príslušný výkon lasera je možné vypočítať hĺbku spolymerizovania. Tento vzťah
vyjadruje nasledujúca rovnica známa ako pracovná krivka kompozitu:
Cd = Dp ln (Emax/Ec)
kde Dp je penetračná hĺbka živice na príslušnej vlnovej dĺžke laserového lúča a Emax je
žiarivý tok lasera [mW] v centre laserového lúča, Ec je materiálová konštanta
kompozitu [mW]. V praxi je hĺbka vrstvy často nastavená na menšiu hodnotu ako je
penetračná hĺbka. Tým sa zabezpečuje isté pretvrdzovanie predošlej vytvrdenej
vrstvy, zabezpečujúce dobré uchytenie novej vrstvy na predošlej. Preto zníženie
hrúbky vrstvy pri konštantnom výkone lasera vedie k zväčšeniu znovu
vytvrdzovaného objemu predošlej vrstvy , čo vedie ku kompaktnejšej štruktúre.
Keďže hustota vytvrdeného materiálu je vyššia ako hustota živice, vytvrdzovaná
vrstva sa zmrašťuje na povrchu predošlej, čím sa obe deformujú a vytvárajú
polmesiačikovitý povrch. Po klesnutí platformy sa tento povrch naplní živicou a pri
vytvrdzovaní ďalšej vrstvy, zostane v prípade, že nemá ako odtiecť pod ňou
uväznený nespolymerizovaný materiál. Tento materiál spolymerizuje až počas
konzervácie, čoho následkom je ešte väčšia deformácia počas tohoto procesu. Geving
et al [63], zhrnuli možnosti ako eliminovať uzatvorenie materiálu medzi vrstvami
pomocou rôznych metód prekrytia spolymerizovanej vrstvy kompozitom. Aj
v prípade použitia takéhoto systému, je však priehyb vrstiev nežiadúci a preto je
potrebné čo možno najlepšie ukotviť model pomocou podporných štruktúr aby sa
nedeformoval a počítať s priehybom modelu na úrovni CAD návrhu.
Okrem samotného stereolitografického procesu dochádza k zmrašťovaniu aj
následne, pri kompletnej polymerizácii (konzervácii) pôsobením UV svetla, alebo
tepelne. Takéto zmrašťovanie už neohrozuje stereolitografický proces. Miera tohoto
zmrašťovania je však vyššia ako pri stereolitografii samotnej, čo môže viesť
k veľkým nepresnostiam modelu, najmä pri použití akrylátových kompozitov. Preto je
dôležité optimalizovať konzerváciu modelov z časového hľadiska, ako aj ich tvar
a orientáciu vrstiev [64].
Nickel [65] sledoval tepelné vplyvy a tvary vrstiev pri procese SDM (shape
deposition modelling), ktorý je veľmi podobný stereolitografii.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 29
Zjednodušene je možné stereolitografický proces chápať ako navrstvovanie
homogénnych vrstiev. Yang [66] sa zaoberal prevenciou deformácii
mnohovrstvových systémov. Janda [67, 68] sa zaoberal zdokonaľovaním metód
merania vnútorných napätí tenkých vrstiev. Metódy výpočtu priehybov a vnútorných
napätí dvoch vrstiev sú veľmi potrebné a často používané v oblasti bi-metalových
termostatov [69].
Súhrn optimalizácie návrhu stereolitografických modelov a procesu ich tvorby
z hľadiska presnosti spracovali Zhou et al [70].
Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 30
2.3 Využitie povrchových trojrozmerných obrazov v medicíne
Podľa Hajeer-a et al [3] klinické použitie stereofotogrametrie bolo prvýkrát
zaznamenané v roku 1944. Viacero techník bolo predložených v literatúre ešte pred
vznikom dnešných digitálnych metód stereofotogrametrie [71]. Metóda
šrukturovaného svetla má pravdepodobne 200 ročnú históriu [72].
Callieri et al [73] použili triangulačný laserový 3D skener na meranie
chronických ochorení a rán kože ako aj monitorovanie a analýzu ich vývoja.
Fuchs et al [74] si vybrali štruktúrované svetlo na výskum v oblasti laparoskopie
z viacerých dôvodov. Prvým bola efektivita a priamosť spracovania informácie. Ďalej
je to metóda robustná vzhľadom na tiene a opakujúce sa oblasti objektu a môže byť
dynamicky vylepšovaná pre zvýšenie robustnosti. Ponúka veľký hĺbkový rozsah
a dovoľuje meniť rýchlosť snímania za účelom vyššej priestorovej presnosti. Vybrali
si metódu binárne kódovaných premietaných útvarov, no neskôr ju vymenili za
metódu projekcie čiar, vzhľadom k tomu, že ich prototypový systém nebol schopný
dosť rýchlo vyhodnocovať hĺbku dynamických scén.
Porovnaním vlastností rôznych trojrozmerných senzorov využívajúcich
stereovíziu a štruktúrované svetlo sa zaoberali Avis et al. [75]. Poukázali na možnosti
3D obrazov v simulácii operácii, ako aj v patológii a edukačnom procese. Povrchové
dáta s textúrou zložili spolu s CT dátami. Napriek mnohým výhodám, majú takéto
metódy problémy, hlavne s odrazom svetla podpovrchových oblastí orgánov.
V porovnaní s inými systémami trojrozmerného snímania sa zariadenie, používané na
našom pracovisku, ShapeCam (Eyetronics), ukázalo byť veľmi rýchle pri snímaní dát,
no senzitívne na podmienky osvetlenia [75].
Sadowsky et al [76] sa zaoberali porovnaním kontaktného systému a systému na
princípe stereovízie pre počítačovo podporované operácie (computer-aided surgery
CAS). Kalibrácia kamier bola vyhodnotená ako najdôležitejší zdroj chýb ich systému.
Ich výsledky indikovali, že registrácia s CT dátami kontaktným spôsobom je
presnejšia a registráciu stereovízie s CT je nutné vylepšiť, najmä lepšou kalibráciou.
Niekoľko navigačných operačných systémov, pracujúcich na princípe
stereovízie, je už v dnešnej dobe komerčne dostupných a bežne používaných [77].
Tieto systémy však neslúžia ako primárny zdroj 3D informácie. Tá sa získava pred

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 31
operáciou pomocou CT, MRI, PET alebo 3D ultrasonických metód. V rámci operácie
tieto systémy slúžia na nájdenie výrazných čŕt, prípadne častí povrchov orgánov,
alebo štruktúr a ich namapovanie na už existujúci 3D model. Je potrebná vzájomná
registrácia význačných bodov, alebo línii na povrchu s volumetrickým modelom
získaným pred operáciou. Takto vytvorený integrovaný model poskytuje operačnému
tímu informácie kde pod povrchom sa nachádzajú dôležité orgány, prípadne nádory, z
uhla pohľadu na ranu, ktorý je rovnaký, ako uhol pohľadu lekárov. Valstar et al [77]
používajú takéto zariadenie na operácie ramenného kĺbu.
Cash et al [78] sa zaoberali použitím laserového triangulačného skenera pri
obrazom navádzanej operácii pečene. Povrchové dáta boli korelované s CT dátami.
Prvá takto nasnímaná pečeň patrila 68 ročnej pacientke s nádorom v pravom lobe
pečene. Jednou z výhod ich postupu bola intraoperatívna možnosť korigovať
deformácie orgánu.
Obrazovo navádzané operácie môžu byť veľmi užitočné pri zložitých operáciách
mozgu a miechy [79]. Narastajúca komplexnosť operácií s použitím minimálne
invazívych techník, ako sú laparoskopia a endoskopia, indikuje signifikantnú
príležitosť na zvýšenie úspešnosti zákrokov vylepšením koordinácie lekára pomocou
techník stereoskopie [79].
Stereoskopické metódy sa často používajú aj ako súčasť systémov navádzania
robotov. Gasteratos et al [80] používajú systém pre navigáciu robotov stereovíziou
spolu s trojrozmerným modelom scény.
Najčastejšími pomôckami pre slepcov sú dlhá palica a vodiaci pes. Bolo
vyvinutých viacero pomôcok zrakovo postihnutým, pracujúcich ako sonar, na trhu sa
však veľmi neujali, pretože neposkytujú signifikantne viac informácii ako dlhšia
palica. Molton et al [81] sa zaoberali vývojom systému pre zrakovo postihnutých,
ktorý ako snímače používa stereovíziu pomocou dvoch kamier umiestnených na
pleciach, s dynamickou rekalibráciou. Okrem stereovízie je do tohto systému
zahrnutých niekoľko sonarov umiestnených na trup nevidiaceho. Tento systém je
schopný detekovať prekážky výšky 10 cm na vzdialenosť 3-5 m. Zatiaľ má niekoľko
nevýhod, týkajúcich sa najmä spracovania množstva informácii a rekalibrácie pri
pohybe nevidiaceho. Výsledky dosiahnuté týmto systémom sú však sľubné a
poukazujú na možnosť využívať podobné systémy v budúcnosti.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 32
Douglasová et al [82] použili stereofotogrametriu röntgenových snímok hlavy
na trojrozmernú lokalizáciu význačných bodov. Použili 10 mm veľké značky. Chyba
ich trojrozmerného merania 16 označených bodov bola menšia ako 1 mm.
2.4 Trojrozmerné počítačové modelovanie tváre a hlavy
Modelovanie a meranie ľudskej tváre má široké uplatnenie v oblasti medicíny,
počítačovej animácie, systémov čítajúcich s pier, telekonferencií a virtuálnej reality
[83].
Diagnostika, analýza rastu, ako aj rozpoznávanie tvárí závisí na identifikácii
význačných bodov tváre [84,85]. Trojrozmerný morfometrický anatomický atlas je
možné po registrácii s trojrozmerným obrazom pacienta použiť na diagnostiku
v oblasti hlavy [86]. Trojrozmerné počítačové zobrazovanie ľudskej anatómie pre
diagnostické, terapeutické a edukačné využitie sa rýchle rozvíja v náväznosti na
rozvoj počítačovej tomografie, zobrazovacích techník magnetickej rezonancie
a mnohých iných techník získavania trojrozmerných dát. Výskum v oblasti
vizualizácie tváre začal v plánovaní kraniofaciálnych operácií, kde sa v súčasnosti aj
úspešne používa [87, 88, 89]. Mnohé ochorenia sa prejavujú zmenou morfológie tváre
[90,91,92,93]. Ochorenia v tvárovej oblasti môžu viesť k obštrukcii dýchacích ciest,
poruchám reči, neschopnosti dýchať, alebo prijímať potravu, prípadne slepote.
Nebezpečné sú aj zápalové procesy v tvárovej oblasti, vzhľadom k anastomózam
cievneho zásobenia oblasti tváre a prínosových dutín s cievnym zásobením mozgu.
Asymetria tváre môže byť dôsledkom genetickej alebo metabolickej poruchy, ako aj
signálom patologického procesu [94].
Nute et al [95] sa zaoberali trojrozmerným štúdiom rastu tváre snímaným
pomocou stereovízie. Použili jednu kameru, ktorá snímala tvár z dvoch smerov cez
systém zrkadiel. Počas snímania boli tváre osvetlené pruhom laserového svetla.
Snímaní dobrovoľníci sa počas snímania točili na otáčavom kresle. Počas
snímania bol z dvoch smerov zaznamenávaný obrazec vzniknutý premietaním úsečky
na tvár. Následne bol počítačom vypočítaný trojrozmerný model tváre. Merania robili
opakovane s tými istými dobrovoľníkmi.
Trojrozmerné modely tvárí majú svoje opodstatnenie aj v diagnostike
malformácií ako aj analýze rastu v kranio-maxilo-faciálnej chirurgii. Dochádza

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 33
k vývinu trendov uskutočňovať predoperačné prípravy za pomoci počítačových
modelov [88, 89, 96, 97]. Metódami 3D antropometrie [98, 99], rekonštrukcie, ako aj
algoritmami pre analýzou 3D modelov pre automatickú detekciu význačných bodov
sa zaoberala Douglasová [97]. Na snímanie 3D modelov tvárí použila fotogrametriu,
stereofotogrametriu [100] ako aj X-ray stereofotogrametriu. Tieto metódy porovnala
s počítačovou tomografiou a zobrazovaním pomocou magnetickej rezonancie.
Kontakt antropomertických meradiel môže deformovať povrch tváre a viesť
k nepresnostiam merania [101]. Meranie vzdialenosti očí pomocou fotografií má
porovnateľnú presnosť zo stereofotogrametrickým meraním v prípade, ak je hlava
meraného človeka upevnená v správnej pozícii pomocou držiaka [102].
Enciso et al [103] sa zaoberali trojrozmernou antropometrickou analýzou,
a asymetriou tváre. Pomocou dotykového skenera Microscribe 3Dx snímali pozície
vybraných Farkasovej antropometrických bodov na modele hlavy. Vyhodnotili
presnosť tohoto zariadenia. Prínosom je, že každý antropometrický bod stačí
definovať v priestore len raz a nie pri každom meraní, čo prispieva k presnosti
metodiky.
Ferrario et al [104] analyzovali trojrozmerný tvar pier a nosu. Z databázy
Laboratória funkcionálnej anatómie stomatognatického aparátu Milánskej Univerzity
získali trojrozmerné dáta 90 mužov a 90 žien vo veku 18 až 32 rokov.
V oblasti 3D rekonštrukcie lebiek pre identifikáciu osôb výskum začal v roku
1980 [87]. Moderným trendom v antropológii je tvorba trojrozmerných počítačových
modelov pre počítačom podporovaný výskum a antropometriu. Trojrozmerné modely
je možné využiť pre rekonštrukcie fragmentov kostí, v historickom výskume,
kriminalistike, sledovaní rastu a podobne.
Objav skamenelých, kostných, rozložených alebo zmrzačených pozostatkov,
kde idendita je neznáma a nie je predpoklad, že tieto pozostatky patria známej osobe,
podáva vyšetrovateľom veľmi málo informácií pre identifikáciu osoby. V týchto
prípadoch sú vyšetrovatelia limitovaný hlavnými aspektami identifikácie ako
napríklad predpokladaný vek, výška, pohlavie, postava. Ak nie je možné identifikovať
pozostatky zvyčajnými postupmi, uvažuje sa o rekonštrukcii tváre za použitia lebky.
Vanezis et al. využívali rekonštrukciu tvárí použitím 3D počítačovej grafiky pre
súdny, ako aj historický a archeologický výskum [87]. Modely lebiek a tvárí žijúcich
subjektov získavali pomocou optického laserového snímacieho systému. Použili

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 34
laserový skenovací systém pre meranie tvárových povrchov ( Facia Optical Surface
Scanner) vyvinutý v Medical Physics Department of University College London.
Podstatou nimi použitej technológie je nafitovať trojrozmerný obraz tváre, na
trojrozmerný obraz lebky pre vytvorenie rekonštruovanej tváre. V súčasnosti existuje
viacero algoritmov pre 3D rekonštrukciu tvárí pomocou 3D modelov kostných
štruktúr.
Naftel a Mao [96] prezentovali hybridnú metódu využívajúcu projekciu
štrukturovaného svetla spolu so stereovíziou, čím urýchlili proces spracovania 3D
modelu.
Hjalgrim et al [89] sa zaoberali antropologickou rekonštrukciou Egyptskej
múmie datovanej do 1 storočia pred našim letopočtom (El-Faiyum, Egypt), ktorá bola
zabalzamovaná spôsobom, typickým pre svoju dobu. Múmia bola vyzdobená
portrétom mladého chlapca, pravdepodobne mumifikovaného. Tento portrét bol
znalcami uznaný za jeden z najkvalitnejších svojej doby (The Carlsberg Glyptotek),
preto výskum tejto múmie musel byť nedeštruktívny a neinvazívny. Trojrozmerný
model získali pomocou počítačovej tomografie. Následne bol pomocou
stereolitografie vytvorený model lebky pre antropologickú analýzu.
Hajeer et al [4] sa zaoberali rôznymi technikami trojrozmernej, počítačovo
podporovanej morfometrie tváre (CT, moiré interferometria, stereofotogrametria,
štruktúrované svetlo), ako aj predoperačnou prípravou s použitím trojrozmerných
modelov tváre.
O’Toole et al [105] sa zaoberali využitím trojrozmerných modelov tváre v
oblasti rozoznávania tvárí, ako aj algoritmami korešpondencie 2D a 3D obrazov.
Využitie trojrozmerných modelov tváre má dôležitú úlohu aj pre prevenciu.
Príkladom môžu byť plynové masky [106], prípadne ochranné okuliare, ktoré presne
kopírujú tvar tváre. Nesprávny tvar a veľkosť ochrannej helmy, najmä u detí, môže
viesť k ohrozeniu života, aj z tohto dôvodu je dôležité zaoberať sa meraním tvaru
hlavy [107].

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 35
2.5 Využitie rýchleho prototypovania v medicíne
Počítačovo podporovaným dizajnom a biologickým inžinierstvom sa zaoberal
Hidson 1988 [108]. Jeho práca bola zameraná na zhrnutie poznatkov a metód
využiteľných pre simuláciu nárazov, medicínske aplikácie počítačového modelovania,
počítačom podporovaný dizajn pre biomechanické inžinierstvo, analýzu tvaru
povrchu a počítačovým modelovaním, ako aj na počítačové modelovanie
antropometrických dát. Ako veľmi vhodné vstupné údaje pre počítačové
modelovanie, vhodné pre plánovanie operácií, označil CT (computer tomography).
Zhrnul poznatky v oblasti výroby prototypov umelých kĺbov pre výrobu foriem na
odlievanie, za pomoci päť - osej frézy (presnosť v tej dobe dosahovala ± 4mm, pri
veľmi kvalitných CT rekonštrukciách ±1 mm).
Používanie medicínskych modelov vytvorených pomocou rýchleho
prototypovania predstavuje nový spôsob plánovania operácií. Tieto techniky dovoľujú
reprodukovať anatomické objekty ako trojrozmerné fyzické modely, ktoré dovoľujú
lekárom realistický prehľad komplexných štruktúr pred operáciou. Posuv od vizuálnej
k vizuálno-dotykovej reprezentácii anatomických objektov predstavuje nový typ
interakcie označovaný „touch to comprehend“ [5]. RP modely sú veľmi vhodné pre
použitie v diagnostike a precíznej preoperatívnej simulácii operácií modifikujúcich
kostné štruktúry.
Trojrozmerné modely vytvorené frézami a stereolitografiou na základe
trojrozmerných CT snímok sa stali esenciálnou súčasťou v diagnostike a plánovaní
terapie mnohých ochorení v tvárovej oblasti a oblasti úst [109].
Petzold et al prezentoval kazuistiky štyroch prípadov použitia RP modelov pre
predoperatívnu prípravu zložitých operácií [5] , ktoré pomohli k vynikajúcim
výsledkom operácií. V prvom prípade išlo o synostózu pravého koronárneho
a lambdoidného švu, prvý krát operovaného dvojročného dieťaťa. Dieťa bolo apatické
a jeho mentálny vývoj bol retardovaný. Zákrok bol plánovaný krok po kroku na
medicínskom RP modeli. V operácii išlo o odstránenie čelovej kosti, asymetrické
obohatenie stredu čela, orbitotómiu a remodelovanie orbity, dissekciu temporálnej
kosti na prúžky, modelovanie, stabilizáciu a spojenie s centrom tváre. Boli
naplánované a simulované dve varianty operácie. Je potrebné sa vyhnúť niekoľkým
zraniteľným štruktúram ako sú zárodočné centrá zubov a mandibulárny nerv pri
umiestňovaní fixačných spojov a skrutiek. To bolo dosiahnuté pri simulácii pomocou

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 36
metódy tvorby selektívne zafarbených stereolitografických modelov (metódu je
možné použiť aj pre FDM modely). V ďalšom prípade išlo o operáciu 5 ročného
tracheotomizovaného dieťa z obštrukciou horných dýchacích ciest. RP model tiež
využili pre operáciu 24 ročného pacienta s otomandibulárnou dysostózou, ako aj 35
ročného pacienta, ktorého zlomeniny lebky sa zhojili v nesprávnej konfigurácii.
V traumatológii je preferovaný rýchly primárny zákrok, vzhľadom k tomu, že výroba
modelu stále trvá najmenej 24 hodín, táto metóda sa nepoužíva často v akútnych
prípadoch. Metódy RP sú však veľmi vhodné pre sekundárne zákroky zle zrastených
fraktúr, re-osteotómií, pre rekonštruktívne merania v mäkkých ako aj kostných
tkanivových defektov. V Mníchove sa ročne uskutoční vyše 200 operácii s
predoperačnou prípravou za pomoci stereolitografických modelov. Metódami odhadu
času potrebného na stereolitografický proces sa zaoberali Giannatsis et al [110], k
času potrebnému na tvorbu modelu treba rátať aj s čas spracovania tohto modelu do
formy vhodnej pre stereolitografiu.
Seitz et al [88] prezentoval nový spôsob tvorby medicínskych modelov kostného
ako aj mäkkého tkaniva pre plánovanie operácií. Na získanie vstupných dát použili
CT. Vytvorili model lebky pacienta so sánkou poškodenou úrazom, model mäkkého
tkaniva tváre, ako aj model implantátu. Model mäkkého tkaniva bol vytvorený zo
silikónovej formy, ktorá bola vytvorená za pomoci stereolitografického master
prototypu, ostatné modely boli vytvorené priamo stereolitografiou. Týmto spôsobom
mohli pred operáciou vyskúšať, akým spôsobom je možné vsadiť implantát. Tiež tak
vzniká možnosť zmeniť tvar implantátu pred operáciou.
Guidoin a Guidoin [111] použil stereolitografický model na výrobu formy pre
výrobu vonkajšieho titánového plášťa pre umelé implantovateľné srdce.
Vrielinck et al [112] používajú stereolitografické modely na výrobu nástrojov
pre operácie pacientov s atrofiami kostí v oblasti tváre. Pomocou stereolitografie
vytvárajú model s negatívnym povrchom ku kostným štruktúram hornej čeluste,
nasnímanej pomocou CT. Takýto povrch je možné počas operácie presne priložiť ku
kosti. V takto vytvorenom povrchu sú vytvorené diery, ktoré slúžia ako držiak pre
vrták počas vŕtania. Týmto je dosiahnuté, že vŕtajú v správnom smere cez kosť, bez
toho aby ohrozili životne dôležité štruktúry, prípadne vŕtali zlým smerom. Takto je
možné implantát umiestniť presne tým spôsobom, ako bolo predoperačne určené.
Stereolitografický model má diery pre vrták vystužené kónickými oceľovými rúrkami

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 37
s vnútorným priemerom o 0,2 mm väčšími, ako vrták aby nedošlo k poškodeniu
stereolitografického modelu. Predoperačná príprava zahŕňa skúšku vyrobeného
modelu s dierami spolu s modelmi časti pacientovej lebky. Niekedy je nutné
pacientovi voperovať väčší počet implantátov. V prípade ak nie je možné uložiť
kovové držiaky vrtákov do jedného stereolitografického modelu, lebo ich polohy sa
vzájomne prekrývajú, vytvárajú pre jednu operáciu viacero takýchto modelov. Použili
túto metodiku u 29 pacientov.
Sun et al [113] vytvorili na základe kontúr histologických preparátov kompletný
CAD model stredného ucha. Následne tento model v zväčšenej mierke vytvorili
pomocou stereolitografu SLA-7000 (3D systems). Takýto model je veľmi vhodný pre
geometrickú verifikáciu, školenia lekárov, diskusie medzi vedcami a lekármi ako aj
plánovanie operačných zákrokov.
Pentecost et al [114] vytvorili stereolitografické modely srdca pre analýzu
embrionálnej hemodynamiky, ako aj edukačné účely.
Lick et al [115] vyvinuli a na 7 ovciach testovali prototyp umelých pľúc. Pre
výrobu silikónových foriem súčastí tohto prototypu použili technológiu RP
používajúcu polyesterový kompozit, čím docielili možnosť iteratívne mnohonásobne
meniť ich dizajn.
V medicínskom výskume sa v posledných rokoch rýchlo začína rozvíjať oblasť
tkanivového inžinierstva (TE – tissue engineering), ktorého cieľom je pomocou
kmeňových alebo progenitorových buniek [116] vytvárať tkanivá [117], prípadne celé
orgány [118, 119, 120]. RP má v tejto aplikácii budúcnosť vo vytváraní kostry,
prípadne telom odbúrateľnej extracelulárnej matrix, počas rastu týchto orgánov
pomocou metód RP.
Sachlos a Czernuszka [121] sa zaoberali využitím rôznych metód RP pre TE.
Poukázali na výhody súvisiace s možnosťou tvorby mikroštruktúry skeletu pre rast
buniek (od ktorej závisí perfúzia a dostatok kyslíka v tkanive). Uviedli aj limitácie
metód RP a spôsoby ako ich je možné obísť.
V prípade transplantácie kože v tvárovej oblasti, by v budúcnosti bolo možné
výrazne znížiť riziká operácie ako aj jej dobu pomocou transplantátu [122], ktorý by
už pred operáciou mal rovnaký, in vitro pripravený [123], trojrozmerný tvar, aký sa
ním má pokryť. Znížil by sa tým aj počet jaziev a doba ich hojenia.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 38
3 Projekt dizertačnej práce
Cieľom projektu je bezkontaktné snímanie tvárí (mäkkých tkanív) a kostných
štruktúr (lebiek), spojené s textúrovaním povrchu vytvorených 3D modelov. Súčasťou
projektu je aj vyhodnotenie dosiahnutej presnosti získavania trojrozmerných modelov
a optimalizácia hustoty bodov popisujúcich povrch modelu. Výstupom projektu bude
zavedenie metodiky a realizácia kvantitatívnych antropometrických meraní, ktoré
umožnia tvorbu virtuálnych modelov mäkkých tkanív na základe predpokladaných
hrúbok tkaniva vo význačných bodoch nasnímaných virtuálnych modelov kostných
štruktúr. V prípade poskytnutých volumetrických, resp. povrchových trojrozmerných
dát, budeme schopný pomocou stereolitografie vytvárať skutočné modely štruktúr
v nich obsiahnutých. Ďalším z našich cieľov je optimalizácia virtuálnych modelov
použiteľných pre stereolitografiu ako aj optimalizácia podporných štruktúr. Chceli by
sme dosiahnuť minimalizáciu odchýlok od pôvodného modelu ako aj čo najlepšie
mechanické vlastnosti nami vytváraných modelov. Pomocou dát nasnímaných
pomocou štruktúrovaného svetla by sme chceli vytvoriť modely využiteľné v oblasti
antropológie.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 39
4 Metódy riešenia projektu
4.1 Snímanie 3D modelu
Na našom pracovisku používame systém ShapeCam od Eyetronics. Zdrojom
štruktúrovaného svetla vybavenia Eyetronics je ako svetelný zdroj blesk Speedlite
EX550. K tomuto blesku je pripojený objektív s ortogonálnou mriežkou obsahujúcou
300 x 300 čiar, táto mriežka je kódovaná. Problémom projektorov je ich malá hĺbka
ostrosti. Šum iných svetelných zdrojov môže byť redukovaný použitím
monochromatického svetla a znecitlivením kamery pre iné farby použitím
monochromatického filtra. Výhodou projekovania mriežky na objekt oproti
pohyblivému laserovému lúču je nižšia cena a menšie problémy zo synchronizáciou.
Laser musí nasvietiť celú čiaru, alebo mriežku v čase kým je uzávierka kamery
otvorená, čo môže zvýšiť šum na takto získaných snímkach.
Aj pri tomto spôsobe získavania 3D dát je potrebné použiť kalibráciu pre objem
väčší, ako je objem snímaného objektu. Na kalibráciu systému Eyetronics je dodaný
tzv. kalibračný box, pozostávajúci z dvoch kolmých rovín na ktorých je textúra
pozostávajúca z tmavých kruhov. Toto teleso je počítač schopný po osvietení
štruktúrovaným svetlom (Obr. 8.) rozoznať pomocou software ShapeSnatcher a podľa
neho nakalibrovať daľšie nasnímané 3D dáta.
Obr.8.: Kalibračné teleso s projekciou mriežky.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 40
V kalibračných dátach je obsiahnutá informácia o konfigurácii projektora
štrukturovaného svetla a fotoaparátu, z ktorých je možné prepočítať tretí rozmer -
kolmý na snímku. Súčasťou systému fy. Eyetronics je snímač ShapeCam (Obr. 9) na
báze digitálnej kamery, projektor štruktúrovaného svetla (mriežky) a programové
vybavenie ShapeSnatcher a ShapeMatcher umožňujúce získať priestorovo-rozlíšené
obrazy objektov pri použití štruktúrovaného svetla na základe porovnania získaného
obrazu s referenčnou maticou získanou pomocou kalibračného telesa. Snímanie oboch
je uskutočňované so vzdialenosti približne 2 – 3 m.
Obr. 9.: 3D skener ShapeCam
V rámci riešenia nášho projektu bol tento systém úspešne nainštalovaný,
nakalibrovaný a využitý pre prvé merania. Zariadenie sme charakterizovali z hľadiska
dosiahnutej presnosti a rozsahu merania, prevádzkových parametrov a materiálovej a
personálnej náročnosti riešenia reverzého inžinierstva reálnych objektov. Pri
skenovaní pomocou štruktúrovaného svetla je 3D model objektu vytvorený zo sady
fotografií (Obr.10), ktoré boli získané z rôznych pohľadov na objekt

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 41
Obr. 10.: Fotografia s projekciou mriežky nasnímaná zaraidením Shape Cam
Z jednotlivých obrázkov je najprv vytvorený 3D reliéf (Obr. 11) objektu na
základe deformácie optickej mriežky premietanej na objekt, následne sú takto
spracované fotografie „spojené“ podľa spoločných referenčných bodov do 3D modelu
(Obr. 12) .
Obr. 11.: 3D reliéf vyhodnotený z 1 snímky

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 42
Obr. 12.: Vľavo spájanie 3D reliéfov (model z každého uhla pohľadu má inú farbu). Vpravo
výsledný 3D model
Výsledný model je exportovaný do formátu STL (standard triangulation
language), príp. vo formáte VRML (virtual reality modelling language) je použiteľný
s extrahovanou textúrou pre konceptuálne modelovanie v animačných balíkoch.
Dosiahnutá presnosť rekonštrukcie objektu v praxi dosahuje cca 1mm. Táto presnosť
sa vzťahuje na rekonštrukciu jednotlivých obrazov bez vyhladzovacích procedúr.
Presnosť rekonštrukcie celého objektu je spravidla menšia, pretože je daná okrem
presnosti jednotlivých snímok aj výsledkom procedúry spájania, ktorá závisí na
vhodnej definícii a prekryve obrazov objektu snímaného z rôznych strán. Pri hladkých
spojitých plochách prebieha táto procedúra bez problémov, v prípade tvarovo
zložitých telies dochádza k nepresnostiam resp. falošným prekryvom pri napájaní
hrán objektu, ktoré je nutné odstrániť viacnásobným preskenovaním rovnakej oblasti
objektu.
Nevýhodou skenovania zložitých objektov s jemnou štruktúrou povrchu je aj
relatívne malá hustota bodov snímanej mriežky (cca 100x100 až 300x300 bodov
podľa veľkosti objektu), ktorá sa prejavuje chýbajúcimi detailami povrchu. Medzi
výhody použitia skenera ShapeCam je prenositeľnosť celého systému do akéhokoľvek
terénu (batériové napájanie), ľahká obsluha a rýchlosť získania dát potrebných
k rekonštrukcii objektu. Tieto vlastnosti predurčujú použitie skenera na virtuálne
modelovanie objektov s relatívne jednoduchou povrchovou geometriou v teréne, pri
ktorých je dôležitá textúra povrchu. Medzi vhodné oblasti použitia môže patriť napr.
virtuálna rekonštrukcia pamiatok a umeleckých predmetov (archeologických,

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 43
architektonických), skenovanie ľudskej postavy, tváre a končatín (pre medicínske
alebo biometrické účely) a pod.
4.2 Stereolitografia
Nasnímané dáta je nutné skonvertovať do formátu STL (standard triangulation
language). Následne tieto dáta upravujeme pomocou programového balíka Magics RP
do tvaru vhodného pre stereolitografiu. Dáta pre stereolitografiu nesmú obsahovať
nesprávne otočené normály trojuholníkov, diery, viacnásobné povrchy a pretínajúce
sa trojuholníky. Tieto úpravy, ako aj testovanie chýb modelu, zmenu jeho mierky,
vyhladzovanie modelov a boolovské operácie pre modely je možné uskutočniť
v prostredí Magics RP (Obr.13.).
Obr.13.: Úprava modelu v prostredí Magics RP.
Veľmi dôležitá pre vznikajúci model je jeho orientácia vzhľadom k vytváraným
vrstvám. Po úprave modelu nasleduje tvorba modelu podporných štruktúr, ktoré sú
v procese stereolitografie uchytené priamo na platforme a udržujú model v správnej
pozícii počas jeho vytvrdzovania v stereolitografe. Tvar týchto podporných štruktúr
(Obr.14) by mal zaručovať pevné držanie modelu počas jeho tvorby ako aj
jednoduchý spôsob ich odstránenia, keď je model hotový.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 44
Obr. 14.: Upravený model s vytvorenými podpornými štruktúrami pre stereolitografiu.
Formát vstupných dát pre RP zariadenie je špecifický pre typ zariadenia. Pre
nami používaný stereolitograf LS 250 je dáta potrebné konvertovať do suboru *.sli
(za sebou radené bitové mapy každej vrstvy). Priamo na počítači, ktorý je súčasťou
stereolitografu je súbor *.sli skonvertovaný na stereolitografický projekt, ktorý je
vstupom pre program na ovládanie stereolitografu.
Po stereolitografickom vytvrdení (Obr. 15a.) je potrebné model zbaviť
podporných štruktúr. Modely následne konzervujeme 30 minút v UV peci (Obr. 14b.).
a b
Obr. 15.: a -Vytvorený stereolitografický model na platforme
b - Konzervácia modelu po odstránení podporných štruktúr v UV peci.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 45
5 Dosiahnuté výsledky
Výsledky našej doterajšej práce sme publikovali vo forme
- Postera :
3D replication of real objects using optical technologies for reverse engineering
and rapid prototyping, Prezentovaný na konferenci Spring Conference on Computer
Graphics (SCCG), 2004, Budmerice, Slovensko.
(Abstrakt v zborníku: strany 46-47, poster: strana 48)
-Prednášky:
Non-Contact scanning, reverse engineering and physical modelling of human
face, Na konferencii Slovak biophysical symposium (SBS), 2004, Herľany,
Slovensko. (Abstrakt v zborníku: strany 49-50)
-Internetovej prezentácie:
Optical technologies for 3D reconstruction of biomedical structures
Prezentovaná v rámci telekonferencie Saratov Fall Meating (SFM), 2004, Saratov,
Rusko.
(On-line na http adrese: http://optics.sgu.ru/SFM/2004/internet/ILC-SFM/ ),
(strany 51-59)
-Postera:
Reverzné inžinierstvo sochy psa a výroba jej repliky pomocou laserovej
stereolitografie, Prezentovaný na stretnutí používateľov software Pro/Engineer,
2004, Stará Lesná, Slovensko. (strana 60)
Náš príspevok: Three-dimensional measurement of human face with structured-
light illumination bol akceptovaný na konverenciu Masurements`05, Smolenice,
Slovensko. (strany 61 - 64)

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 46

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 47

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 48

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 49

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 50

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 51

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 52

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 53

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 54

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 55

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 56

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 57

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 58

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 59

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 60

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 61

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 62

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 63

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 64

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 65
6 Literatúra 1 Page D., Koschan A., Sun Y., Abidi M.: Laser based imaging for reverse engineering, Sensor Review, 23(3), 2003, 223-229. 2 Chikofsky E.J., Cross J.H.: Reverse Engineering and Design Recovery: A Taxonomy, Proceedings of IEEE Software, 7(1), 1990, 13-17. 3 Hajeer Y., Ayoub A.F., Millett D.T., Bock M., Siebert J.P.: Three-dimensional imaging in orthognatic surgery: The clinical application of a new method, Internal Journal of Adult Orthognathic Surgery, 17 (4), 2002, 1-13. 4 Hajeer M.Y., Millett D.T., Ayoub A.F. Siebert J.P.: Applications of 3D imaging in orthodontics: Part I , Journal of Orthodontics, 31, 2004, 62-70. 5 Petzold R., Zeilhofer H.-F, Kalender W.A.: Rapid prototyping technology in medicine – basics and applications, Computerized Medical Imaging and Graphics, 23, 1999, 277-284. 6 Im Y.G., Chung S.I., Son J.H., Jung Y.D., Jo J.G., Jeong H.D.: Functional prototype development: inner visible multi-color prototype fabrication using stereo lithography, Journal of Materials Processing Technology, 130-131, 2002, 372-377. 7 Sousa R.A., Reis L.R., Cuhna A.M., Bevis M.J.: Processing and properties of bone-analogue biodegradable and bioinert polymeric composites, Composites Science and Technology, 63, 2003, 389-402. 8 Žára J., Beneš B., Sochor J., Felkel P.: Moderní počítačová grafika, Computer press, Brno, 2004, 609 s. 9 Ferko A., Ružický E.: Počítačová grafika a spracovanie obrazu, Vydavateľstvo Sapientia, 1995, 325 s. 10 Tucci G., Guidi G., Ostuni D., Costantino F., Pieraccini M., Beraldin J.A.: Photogrammetry and 3D scanning: Assessment of Metric Accuracy for the Digital Model of Donatello`s Maddalena, In Proceedings of the 2001 Workshop of Itay-Canada on 3D Digital Imaging and modeling Application of: Heritage, Industry, Medicine, and Land, Padova, Taliansko, 3-4. apríl 2001, 8 s. 11 Riddel D.: Maya 5 pro Windows a Macintosh – Názorný průvodce, Computer Press, Brno, 2004, 412 s. 12 Boehler W., Marbs A.: 3D Scanning Instruments, In Proceedings of CIPA, Heritage Documentation – International Workshop on scanning for cultural heritage recording, Korfu, Gécko, 2002, 4 s. 13 Curless B.L.: New Methods for surface reconstruction from range images, Dizertačná práca, Department of electrical engineering and the commitee on graduate studies, Stanford University, 1997, 189 s.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 66
14 Choi K.N., Worthington P.L., Hancock E.R.: Estimating facial pose using shape-from-shading, Pattern Recognition Letters, 23, 2002, 533-548. 15 Chen S.Y., Li Y.F.: Self-recalibration of a colour-encoded light system for automated three-dimensional measurements, Measurement Science and Technology, 14, 2003, 33-40. 16 Chen S.Y., Li Y.F.: Self-recalibration of a Structured Light Vision System from a Single View, Proceedings of the 2002 IEEE International Conference on Robotics & Automation, Washington, DC, USA, máj 2002, 2539-2544. 17 Trucco E., Fusiello A., Roberto V.: Robust motion and correspondence of noisy 3-D points sets with missing data, Pattern Recognition Letters, 20, 1999, 889-898. 18 Zitová B., Flusser J.: Image registration methods: a survey, Image and Vision Computing, 21, 2003, 977-1000. 19 Siebert J.P., Marshall S.J.: Human body 3D imaging by speckle texture projection photogrammetry, Sensor Review, 20(3), 2000, 218-226. 20 Zimanyi M.: Reconstruction of Object Model from Range Data, Rigorózna práca, Fakulta Matematiky Fyziky a Informatiky, Univerzita Komenského, 2000, 20 s. 21 Pollefeys M., Koch R., Vergauwen M., Van Gool. L: Automated reconstruction of 3D scenes from sequences of images, ISPRS Journal of Photogrammetry and Remote Sensing, 55(4), 2000, 251-267. 22 Zhang L., Curless B., Hertzmann A., Seitz S.M.: Shape and Motion under Varying Illumination: Unifying Structure from Motion, Photometric Stereo, and Multi-view Stereo, In Proceedings of the 9th IEEE International Conference on Computer Vision (ICCV), Nice, France, Oct., 2003, 618 - 625. 23 Neumann J., Fermüller, Aloimonos Y.: Eyes from Eyes: New Cameras for Structure from Motion, Proceedings of the third IEEE workshop on omnidirectional vision, Copenhagen, Dánsko , 2002, 8 s. 24 Basu S., Olivier N., Pentland A.: 3D lip shapes from video: A combined physical-statistical model, Speech Communication 26, 1998, 131-148. 25 Amoretti M., Bottazi S., Reggiani M., Castelli S.: Designing telerobotic systems as distributed COBRA – based application, RIMlab – Robotics and Intelligent machines Laboratory, Pharma, Proceedings of the International Symposium on Distributed Objects and Applications, DOA'03, Catania, Taliansko, November 2003, 1063-1080. 26 Fofi D., Salvi J., Mouaddib E.M.: Uncalibrated reconstruction: an adaptation to structured light vision, Pattern Recognition, 36, 2003, 1631-1644.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 67
27 Rocchini C., Cignoni P., Montani C., Pingi P., Scopigno R.: A low cost 3D scanner based on structured light, Proceedings of Computer Graphics Forum Eurographics, 20(3), 2001, 299-308. 28 Scharstein D., Szeliski R.: High-Accuracy Stereo Depth Maps Using Structured Light, In IEEE Computer Vision and Pattern Recognition (CVPR 2003), vol. 1, Madison, USA, 2003, 195 - 202. 29 Kapusta R.: Scene reconstruction using structured light, Proceedings of the CESCG 2003, Budmerice, Slovakia, 2003, 6 s. 30 Maas H.G.: Robust Automatic Surface Reconstruction with Structured Light, International Archives of Photogrammetry and Remote Sensing, Vol. XXIV, 1992, 709-713. 31 Salvi J.: An approach to coded structured light to obtain three dimensional information, Dizertačná práca, Department of Electronics, Informatics and Automation, University of Girona, 1998, 160 s. 32 Herbig P.: Anmerkungen zur Stereofotografie mit vergrößerter oder verkleinerter Basis, 4 s. http://home.t-online.de/home/agp.herbig/german/variable_stereobasis.htm 31.1.2005 33 Pottmann H., Leopoldseder S., Hofer M.: Registration without ICP, Computer Vision and Image Understanding, 95(1), 2004, 54-71. 34 Estépar R.S.J., Brun A., Westin C.-F.: Robust Generalized Total Least Squares Iterative Closest Point Registration, In Proceedings of the Seventh International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI`2004), Renes –Saint Maio, Franúzko, 2004, 234-241. 35 Rodrigues M.A., Liu Y.: On the representation of rigid body transformations for accurate registration of free-form shapes, Robotics and Autonomous Systems, 39, 2002, 37-52. 36 Jaeggli T., Koninckx T.P., Van Gool L.: Online 3D Acquisition and Model Integration, In Proceedings of the IEEE International Workshop on Projector-Camera Systems –ICCV03, Nice, Francúzko, 2003, 8 s. 37 Liska Ch., Sablating R.: Adaptive 3D Acquisition using Laser Light, Czech pattern Recognition Workshop 2000, Peršlák, Česká Republika, 2.-4. február 2000, 6 s. 38 Robinson A., Alboul L., Rodrigues M.: Methods for Indexing Stripes in Uncoded Structured Light Scanning Systems, Journal of WSCG, 12(1-3), WSCG`2004, Plzeň, Česká republika, 2. - 6. február, 2003, 8 s.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 68
39 Koninckx T.P., Van Gool L.: Efficient, Active 3D Acquisition, based on a Pattern-Specific Snake, Proceedings of the 24th DAGM symposium on pattern recognition, lecture notes in computer science, 2449, 16-18. september 2002, Zurich, Švajciarsko, 557-565. 40 Prosemans M., Gool L.: Reading between the lines – a method for extracting dynamic 3D with texture, Proceedings of the ACM symposium on Virtual reality software and technoogy, Lausanne, Švajciarsko, 1997, 95-102. 41 Fofi D., Sliwa T., Voisin Y.: A comparative survey on invisible structured light, SPIE electronic imaging – machine vision applications in industrial inspection XII (MUA II‘ 2004), San José, USA , január 2004, 9 s. 42 Chia T.L.: Computing 3-D Location and Shape Parameters of Cones Using Structured Lights, Journal of Information Science and Engineering, 15, 1999, 27-40. 43 Zhang L., Curless B., Seitz S.M.: Rapid shape Acqisition using color structured light and Multi-pass dynamic programming, International Symposium on 3D Data Processing Visualization and Transmission, Padova, Italy, Jún 2002, 24 - 37. 44 Kalkhoven T., Namber N.: 3D measurment methods, research project, 39 s. http://www.io.tudelft.nl/cade/onderzoeksleer/reports/kalkhoven001.pdf 21.1.2003 45 Floater M.S., Hormann K.: Surface Parametrization: a Tutorial and Survey, in Advances in Multiresolution for Geometric Modelling, Dogson N.A., Floater M.S., Sabin M.A. eds., Springer Verlag, Berlin, 2005, 157-186. 46 Pratt M.J., Bhatt A.D., Dutta D., Lyons K.W., Patil L., Sriram R.D.: Progress towards an international standard for data transfer in rapid prototyping and layered manufacturing, Computer-Aided Design, 34, 2002, 1111-1121. 47 Starly B., Lau A., Sun W., Lau W., Bradbury T.: Direct slicing of STEP based NURBS models for layered manufacturing, Computer-Aided Design, 37, 2005, 387-397. 48 Béchet E., Cuilliere J.-C., Trochu F.: Generation of finite element MESH from stereolithography (STL) files, Computer-Aided Design, 34, 2002, 1-17. 49 Choi S.H., Samavedam S.: Modelling and optimisation of Rapid Prototyping, Computers in Industry, 47, 2002, 39-53. 50 Heger M.: Entwicklung eines Stereolithographieharzes für elastomere produkte, Dizertačná práca, Technická univerzita Darmstadt, 2001, 115 s. 51 Eschl J.: Die Mechanischen Eigenschaften von Stereolithographiematerialien während der Aushärtung, Dizertačná práca, Institut für Kunststoffprüfung und Kunststoffkunde der Universität Stuttgard, Stuttgard, 2002, 92 s.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 69
52 Nee A.Y.C., Fuh J.Y.H., Miyazawa T.: On the improvement of the stereolithography (SL) process, Journal of Materials Processing Technology, 113, 2001, 262-268. 53 Fuh J.Y.H., Lu L., Tan C.C., Shen Z.X., Chew S.: Processing and characterising photo-sensitive polymer in the rapid prototyping process, Journal of Materials Processing technology, 89-90, 1999, 211-217. 54 Gunnars J., Wiklund U.: Determination of growth-induced strain and thermo-elastic properties of coatings by curvature measurements, Materials Science and Engineering, A336, 2002, 7-21. 55 Cheah C.M., Nee A.Y.C., Fuh J.Y.H., Lu L., Choo Y.S., Miyazawa T.: Characteristics of photopolymeric material used in rapid prototypes, Part I. Mechanical properties in the green state, Journal of Materials Processing Technology, 67, 1997, 41- 45. 56 Cheah C.M., Fuh J.Y.H., Nee A.Y.C., Lu L., Choo Y.S., Miyazawa T.: Characteristics of photopolymeric material used in rapid prototypes, Part II. Mechanical properties at post-cured state, Journal of Materials Processing Technology, 67, 1997, 46- 49. 57 Fuh J.Y.H., Lu L., Tan C.C., Shen Z.X., Chew S.: Processing and characterising photo-sensitive polymer in the rapid prototyping process, Journal of Materials Processing technology, 89-90, 1999, 211-217. 58 Karalekas D., Rapti D., Gdoutos E.E., Aggelopoulos A.: Investigation of Schrinkage-induced Stresses in Stereolithography Photo-Curable Resins, Experimental Mechanics, 42(4), 2002, 439 - 444. 59 Karalekas D., Aggelopoulos A.: Study of shrinkage strains in a stereolithography cured acrylic photopolymer resin, Journal of materials Processing technology, 136, 2003, 146-150. 60 Karalekas D.E.: Study of the mechanical properties of nonwoven fibre mat reinforced photopolymers used in rapid prototyping, Materials and Design, 24, 2003, 665-670. 61 Harris R.A., Hague R.J.M., Dickens P.M.: The structure of parts produced by stereolithography injection mould tools and the effect on part schrinkage, International Journal of Machine Tools & Manufacture, 44 ,2004, 59-64. 62 Schwerdt J.: Computing an optimal hatching direction in Layered Manufacturing, International conference on computational science, 1, 2001, 683-692.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 70
63 Geving B., Kataria A., Moore C., Ebert-Uphoff I., Kurfess T.R., Rosen D.W.: Conceptual design of a generalized stereolithography machine, Proceedings of the 2000 Japan-USA Symposium on flexible automation, paper #2000JUSFA-13172, Ann Arbor, Mi,USA, 23.-26. Júl, 2000, 8 s. 64 Kim H-Ch., Lee S.-H.: Reduction of post-processing for stereolithography systems by fabrication-direction optimization, Computer-Aided Design, 37(7), 2005, 711-725. (Article in press) 65 Nickel A.H., Barnett D.M., Prinz F.B.: Thermal stresses and deposition patterns in layered manufacturing, Materials Science and Engineering, A317 , 2001, 59-64. 66 Yang J.C.S.: Prevention of Thermal Bending of multuilayered Beams and Plates, Experimental Mechanics, november 1975, 418 – 423. 67 Janda M.: Metody měžení vnitžního pnutí tenkých vrstev, Jemná Mecahnika a Optika, 10, 1985, 263-267. 68 Janda M.: Metody měžení vnitžního pnutí tenkých vrstev, Jemná Mecahnika a Optika, 11, 1985, 291-294. 69 Suhir E.: Stresses in Bi-metal thermostats, Journal of Applied Mechanics, september 53, 1986, 657-660. 70 Zhou J.G., Herscovici D., Chen C.C.: Parametric process optimization to improve the accuracy of rapid prototyped stereolithography parts, International Journal of Machine Tools & Manufacture, 40, 2000, 363-379. 71 Schmaltz G.: Eine Methode zur Darstellung der Profilkurven rauher Oberflächen, Die Naturwissenschaften,18, 1932, 315-316. 72 Livingston M.A.: Vision-based Trackong with Dynamic Structured Light for Video See-through Augmented Reality, Dizertačná práca, Faculty at Chapel Hill, University of North Carolina, 1998, 130 s. 73 Callieri M., Cignoni P., Pingi P., Scopigno R., Collucia M., Gaggio G., Romanelli M.: Derma: monitoring the evolution of skin lessions with a 3D system, In Proceedings of the 8th International Workshop on Vision, Modeling, and Visualization, Mníchov, Nemecko, 2003, 8 s. 74 Fuchs H., Livingston M.A., Raskar R., Collucci D., Keller K., State A., Crawford J.R., Rademacher P., Drake S.H., Meyer A.: Augmented Reality Vizualization for Laparoscopic Surgery, Proceedings of the 1st Int. Conf. on Med. Image Comput. And Computer-Assisted Intervention (MICCAI`98), MIT, Cambridge, USA, 1998, 11-13.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 71
75 Avis N.J., Kleinermann F., McClure J.: Soft Tissue Surface Scanning – A comparison of commercial 3D object scanners for surgical simulation content creation and medical education applications, Proceedings of the 2nd International symposium on medical simulation, Emerging science/enabling technologies, Massachussets, 2004, 10 s. 76 Sadowsky O., Yaniv Z., Joskowitz L.: Comparative In Vitro Study of Contact- and Image- Based Rigid Registration for Computer-Aided Surgery, Computer Aided Surgery, 7, 2002, 223-236. 77 Valstar E.R., Botha Ch.P., Van der Glas M., Rozing P.M., Van der Helm F.C.T., Post F.H., Vossepoel A.M.: Towards computer-assisted surgery in shoulder joint replacement, ISPRS Journal of Photogrammetry & Remote Sensing, 56, 2002, 326-337. 78 Cash M.D., Sinha T.K., Chapman W.C., Terawaki H., Dawant B.M., Galloway R.L., Miga M.I.: Incorporation of a laser range scanner into image-guided liver surgery: Surface acquisition, registration, and tracking, Medical Physics, 30(7) 2003, 1671-1682. 79 Vannier M.W., Haller J.W.: Navigation in diagnosis and therapy, European Journal of Radiology, 31, 1999, 132-140. 80 Gasteratos A., Beltran C., Metta G., Sandini G.: PRONTO: a system for mobile robot navigation via CAD-model guidance, Microprocessors and Microsystems, 26, 2002, 17-26. 81 Molton N., Se S., Brady J.M., Lee D., Probert P.: A stereo vision-based aid for the visually impaired, Image and Vision Computing, 16, 1998, 251-263. 82 Douglas T.S. Vaughan C.L., Wynne S.M.: Three-dimensional point localisation in low-dose X-ray images using stereo-photogrammetry, Medical & Biomedical Engineering & Computing, 42, 2004, 37-43. 83 D`Apuzzo N.: Modeling Human Faces with Multi-Image Photogrammetry, In Proceedings of SPIE, Three-Dimensional Image Capture and Applications V, San Jose, California, 4661, 2002, 7 s. 84 Farkas L.G.: Accuracy of Anthropometric Measurements: Past, Present, and Future, Cleft Palate-Craniofcial Journal, 33, 1996, 10-22. 85 El-Hussuna A.: Statistical variation of Three Dimensional face models, Diplomová práca, IT-University of Copenhagen, Multimedia Technologies, 2003, 66 s. 86 Subsol G., Thirion J.-P., Ayache N.: A scheme for automaticly building three-dimensional morphometric anatomical atlases: application to a skull atlas, Medical Image Analysis, 2(1), 1998, 37-60.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 72
87 Vanezis P., Vanezis M., McCombe G., Niblett T.: Facial reconstruction using 3-D computer grahics, Forsenic Science International, 108, 2000, 81-95. 88 Seitz H., Tille C., Irsen S., Bermes G., Sader R., Zielhofer H-F.: Raprid prototyping models for surgical planning with hard and soft tissue representation, International Congress Series, 1268, 2004, 567-572. 89 Hjalgrim H., Lynnerup N., Liversage M., Rosenklint A.: Stereolithography: Potential applications in anthropological studies, American Journal of Physical Anthropology, 97, 1995, 329-333. 90 Astley S.J., Clarren S.K.: Measuring the facial phenotype of individuals with prenatal alcohol exposure: correlations with brain dysfunction, Alcohol & Alcoholism, 36(2), 2001, 147-159. 91 Ferrario V.F., Dellavia C., Tartaglia G.M., Turci M., Sforza Ch.: Soft Tissue facial Morphology in Obese Adolescents: A Three-Dimensional Noninvasive Assessment, Angle Orthodontist, 74(1), 2004, 37-42. 92 Allanson J.E., Greenberg F., Smith A.C.M.: The face of Smith-Magentis syndrome: a subjective and objective study, Journal of Medical Genetics, 36, 1999, 394-397. 93 Moore S.J., Turnpenny P., Quinn A., Glover S., Lloyd D.J., Montgomery T., Dean J.C.S.: A clinical study of 57 children with fetal anticonvulsant syndromes, Journal of Medical Genetics, 37, 2000, 489-497. 94 Thornhill R., Gangestad S.W.: Facial attractiveness, Trends in Cognitive Sciences, 3(12), 1999, 452-460. 95 Nute S.J., Orth M., Moss J.P., Orth D.: Three-dimensional facial growth studied by optical surface scanning. Journal of Orthodontics, 27, 2000, 31-38. 96 Naftel A., Mao Z.: Acquiring dense 3D facial models using structured-light assisted stereo correspondence, ICCVG 2002, Int. Conference on computer vision and graphics, Zakopane, Poland, 2002, 9 s. 97 Douglas T.S.: Image processing for craniofacial landmark identification and measurement: a review of photogrammetry and cephalometry, Computerized Medical Imaging and Graphics, 28, 2004, 401-409. 98 Farkas L.G., Deutsch C.K.: Antropometric Determination of Craniofacial Motphology, American Journal of Medical Genetics, 65, 1996, 1-4. 99 Farkas L.G.: Accuracy of Anthropometric Measurements: Past, Present, and Future, Cleft Palate-Craniofacial Joutnal, 33(1), 1996, 10-21.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 73
100 Douglas T.S., Martinez F., Meintjes E.M., Vaughan C.L., Viljoen D.L.: Eye feature extraction for diagnosing the facial phenotype associated with fetal alcohol syndrome, Medical & Biological Engineering & Computing, 41, 2003, 101-106. 101 Ferrario V.F., Sforza Ch., Poggio C.E., Cova M., Tartaglia G.: Preliminary Evaluation of an Electromagnetic Three-Dimensional Digitizer in Facial Anthropometry, Cleft Palate-Craniofacial Joutnal, 35(1), 1998, 9-15. 102 Douglas T.S., Meintjes M.N., Vaughan Ch.L., Viljoen D.L.: Role of Depth in Eye Distance Measurements: Comparision of Single and Stereo-Photogrammetry, Americal Journal of Human Biology, 15, 2003, 573-578. 103 Enciso R., Shaw A., Neumann U., Mah J.: 3D head anthropometric analysis, In proceedings of the SPIE (The International Society or Optical Engineering), Medical Imaging, 5029, 2003, 590-597. 104 Ferrario V.F., Sforza Ch., Serrao G.: A Three-Dimensional Quantitative Analysis of Lips in Normal Young Adults, Cleft Palate-Craniofacial Journal, 37(1), 2000, 48 – 54. 105 O`Toole A.J., Vetter T., Blanz V.: Three-dimensional shape and two-dimensional surface reflectance contributions to face recognition: an application of three-dimensional morphing, Vision Research, 39, 1999, 3145-3155. 106 Rhi J., Han D.: A Design Process for Half-face Piece Respirators with Face Digitizing Method, Proceedings of the 6th Asian design conference, Tsukuba, Japonsko, 14.-17. október 2003, 6 s. 107 Rivara F.P., Astley S.J., Clarren S.K., Thompson D.C., Thompson R.S.: Fit of bicycle safety helmets and risc of head injuries in children, Injury Prevention, 5, 1999, 194-197. 108 Hidson D. J.: Computer-Aided Design and Bio-Engineering: A review of the literature, Defence research establishment Ottawa, technical note 88-31, Department of National Defence, Ontario, Júl 1988, 26 s. 109 Gaggl A., Schulters G., Santler G., Kärcher H.: Treatment planning for sinus lift augmentations through use of 3-dimensional milled models derived from computed tomography scans, Oral Surgery Oral Medicine Oral Pathology, 85(4), 1998, 388-392. 110 Giannatsis J., Dedoussis V., Laios L.: A study of the build-time estimation problem for Stereolithography systems, Robotics and computer Integrated Manufacturing, 17, 2001, 295 -304. 111 Guidoin M.F., Guidoin R.G.: Materials selection for the design and development of the housing for a totally implantable artifical heart: superiority of titanium and its alloys, ITBM-RBM, 25(3), 2004, 126-138.

Progresívne optické technológie reverzného inžinierstva a rýchleho prototypovania v medicíne 74
112 Vrielinck L., Politis C., Schepers S., Pauwels M., Naert I.: Image-based planning and clinical validation of zygoma and pterygoid implant placement in patients with severe bone atrophy using customized drill guides. Preliminary results from a prospective clinical follow-up study, International Journal of Oral & Maxillofacial Surgery, 32, 2003, 7-14. 113 Sun Q., Chang K.-H., Dormer K.J., Dyer R.K., Gan R.Z.: An advanced computer-aided geometric modeling and fabrication method for human middle ear, Medical engineering & Physics, 24, 2002, 595 – 606. 114 Pentecost J.O., Icardo J., Thornburg K.L.: 3D Computer modeling of human cardiogenesis, Computerized Medical Imaging and Graphics, 23, 1999, 45-49. 115 Lick S.D., Zwischenberger J.B., Wang D., Deyo D.J., Alpard S.K., Chambers S.D.: Improved Rigt Heart Function With a Compliant Inflow Artifical Lung in Series With the Pulmonary Circulation, The Annals of Thoracic Surgery, 72(3), 2001, 899-904. 116 Levenberg S., Huang N.F., Lavik E, Rogers A.B., Itskovitz-Eldor J., Langer R.: Differentiation of human embryonic stem cells on three-dimensional polymer scaffolds, Proceedings of the National Academy of Sciences of the United States of America (PNAS), 100(22), 2003, 12741-12746. 117 Jakab K., Neagu A., Mironov V., Markwald R.R., Forgacs G.: Engineering biological structures of prescribed shape using self-assembling multicellular systems, Proceedings of the National Academy of Sciences of the United States of America (PNAS), 101(9), 2004, 2864-2869. 118 Sun W., Lal P.: Recent development on computer aided tissue engineering – a review, Computer Methods and Programs in Biomedicine, 67, 2002, 85-103. 119 Langer R.S., Vacanti J.P.: Tissue engineering:the challenges ahead, Special Report, Scientific American, Apríl 1999, 86-89. 120 Salgado A.J., Coutinho O.P., Reis R.L.: BoneTissue Engineering: State of the Art and Future trends, Macromolecular Bioscience, 4, 2004, 743-765. 121 Sachlos E., Czernuszka J.T.: Making tissue engineering scaffolds work. Review on the application of solid freeform fabrication technology to the production of tissue engineering scaffolds, European Cells and Materials, 5, 2003, 29-40. 122 Kumar S., Wong P.F., Leaper D.J.: Perspectives In Medical Sciences: What is New in Wound Healing?, Turkish Journal of Medical Sciences, 34, 2004, 147-160. 123 Yannas I.V.: Synthesis of organs: In vitro or in vivo ?, In Proceedings of the National Academy of Sciences PNAS, 97(17), 2000, 9354-9356.
























![CME rate : 1/3 (4) day -1 at solar min (max) [LASCO CME catalogue. Yahsiro et al., 2005]](https://img.pdfslide.tips/doc/110x75/56814ac7550346895db7da5f/cme-rate-13-4-day-1-at-solar-min-max-lasco-cme-catalogue-yahsiro.jpg)




