Embed Size (px)
Citation preview

Centro de Investigación Científica y de Educación Superior de Ensenada, Baja California
Maestría en Ciencias
en Electrónica y Telecomunicaciones
con orientación en Instrumentación y Control
Diseño de un microaerogenerador de eje vertical
Tesis para cubrir parcialmente los requisitos necesarios para obtener el grado de
Maestro en Ciencias
Presenta: Mikhail Ramos Domínguez
Ensenada, Baja California, México 2018

Tesis defendida por
Mikhail Ramos Domínguez
y aprobada por el siguiente Comité
Mikhail Ramos Domínguez © 2018 Queda prohibida la reproducción parcial o total de esta obra sin el permiso formal y explícito del autor y director de la tesis.
Dr. Daniel Sauceda Carvajal Director de tesis
Dr. Miguel Ángel Alonso Arévalo
Dr. Ricardo Arturo Chávez Pérez
Dra. Vanesa Magar Brunner
Dr. Daniel Sauceda Carvajal Coordinador del Posgrado en
Electrónica y Telecomunicaciones
Dra. Rufina Hernández Martínez Directora de Estudios de Posgrado

ii
Resumen de la tesis que presenta Mikhail Ramos Domínguez como requisito parcial para la obtención del grado de Maestro en Ciencias en Electrónica y Telecomunicaciones con orientación en Instrumentación y Control.
Diseño de un microaerogenerador de eje vertical
Resumen aprobado por: _________________________
Dr. Daniel Sauceda Carvajal Director de tesis
En este trabajo se presenta el estudio de un aerogenerador de eje vertical con dos rotores en contrarrotación. Aplicando la dinámica de fluidos computacional, se llevaron a cabo simulaciones en dos y tres dimensiones para analizar las fuerzas de arrastre, sustentación y momento en tres diferentes modelos de rotor tipo Savonius. De acuerdo a los resultados obtenidos, la topología más eficiente fue la que considera un desfase en las cazoletas de 0.15 con respecto al diámetro y la que opera en un rango mayor de velocidades de viento, es la del tipo Savonius clásico. Palabras clave: Energía eólica, CFD, Simulación, Savonius, Contrarrotación, Aerogenerador

iii
Abstract of the thesis presented by Mikhail Ramos Domínguez as a partial requirement to obtain the Master of Science degree in Electronics and Telecommunications with orientation in Instrumentation and Control
Design of a vertical axis micro wind turbine
Abstract approved by: __________________________
Dr. Daniel Sauceda Carvajal Thesis Director
The study of a vertical axis wind turbine with two rotors in counter rotation is presented. Applying computational fluid dynamics, simulations in two and three dimension were done to analyze the drag, lift force and momentum in three different models of Savonius type rotors According to the obtained results, the most efficient topology was the one that considers an overlap in the cups of 0.15 with respect to the diameter and the one that operates in a greater range of wind speeds, is the classic Savonius type.
.
Keywords: Wind energy, Wind turbine, CFD, Simulation, Savonius, Counterrotation

iv
Dedicatoria
A mis padres Jorge Ramos y Rosalina Domínguez.
A mis hermanos Francisco y Fernando.
A mis tíos Gabriel y Silvia.
A mis abuelas Julia y María.
Por su cariño, apoyo, comprensión,
confianza y enseñanzas incondicionales
que me han ayudado en cada paso que he dado.
v
Agradecimientos
A CICESE, por abrirme sus puertas y permitirme realizar mis estudios de maestría en un posgrado de
nivel mundial.
Al Dr. Daniel Sauceda Carvajal y la Dra. Marcela Ovalle Marroquín por haberme brindado su apoyo,
confianza, conocimientos y herramientas necesarias para concluir mis estudios de maestría y quienes
han sido mis apoyos fundamentales durante mi estancia en CICESE.
A los miembros de mi comité de tesis, Dra. Vanesa Magar Brunner, Dr. Miguel Ángel Alonso Arévalo y Dr.
Ricardo Arturo Chávez Pérez, por haber aceptado ser parte de este proyecto, por sus consejos y
disciplina inculcada.
A la Dra. Ivett Zavala por haberme proporcionado parte de su tiempo y brindarme conocimientos que
ayudaron a mejorar y concluir este proyecto.
A mis profesores y amigos de energías renovables: Dr. Francisco J. Carranza, M.Cs. Moisés Castro, M.Cs.
Beatriz Stephens, M.Cs. Alejandro Álvarez, M.Cs. Víctor Juárez, Sr. Raúl Moreno, Ing. Fernando Gómez y
Srta. Daniela Villa por haberme otorgado su amistad, confianza, ayuda y conocimientos que han ayudado
a concluir exitosamente este proyecto.
A mis amigos y compañeros de generación, Alan Calderón, Heberto Molina, Isaí Cabral, Luis Mízquez,
Luis Reyes, Manuel Lizárraga y Rolando Díaz por haberme brindado su amistad y haber pasado
experiencias inolvidables en estos años y más en esos meses críticos del 2016.
A mi amigo Arturo Iñiguez que siempre me ha brindado su apoyo y conocimientos que ayudaron a
aterrizar ideas del proyecto. A mi entrenador Aarón Aguilar que me ha ayudado a mejorar quien soy de
manera física, mental y espiritual.
A CONACYT, por el apoyo económico que permitió desempeñarme de la mejor manera en mis estudios.

vi
Tabla de contenido Página
Resumen en español……………………………………………………………………………………………………………………………ii
Resumen en ingles……………………………………………………………………………………………………………………………..iii
Dedicatoria ........................................................................................................................................ iv
Agradecimientos ................................................................................................................................ v
Lista de figuras ................................................................................................................................ viii
Lista de tablas..................................................................................................................................... x
Capítulo 1. Introducción ..................................................................................................................... 1
1.1 Planteamiento del problema............................................................................................................... 2
1.2 Justificación ......................................................................................................................................... 3
1.3 Objetivos. ............................................................................................................................................ 4
1.3.1. Objetivo general. .............................................................................................................................4
1.3.2 Objetivos específicos. .......................................................................................................................4
Capítulo 2. Marco teórico ................................................................................................................... 5
2.1 Turbinas de eje vertical y eje horizontal. ............................................................................................ 5
2.2 Rotores del tipo arrastre y sustentación ........................................................................................... 11
2.2.1 Limite de Lanchester-Betz ............................................................................................................. 14
2.3 Clasificación de turbinas por su tamaño. .......................................................................................... 17
2.4 Parques eólicos.................................................................................................................................. 22
Capítulo 3. Metodología ................................................................................................................... 23
3.1 Análisis de disponibilidad de viento. ................................................................................................. 23
3.2 Estudio de los rotores........................................................................................................................ 24
3.2.1 Diseño 2D y 3D. ............................................................................................................................. 25

vii
3.2.3 Proceso de mallado. ...................................................................................................................... 31
3.2.4 Configuración de Fluent. ............................................................................................................... 37
Capítulo 4. Resultados y Discusión .................................................................................................... 43
4.1 Análisis de disponibilidad de viento. ................................................................................................. 43
4.2 Verificación ........................................................................................................................................ 45
4.3 Análisis de la curva de potencia ........................................................................................................ 47
4.3.1 Análisis bidimensional ................................................................................................................... 47
4.3.2 Análisis tridimensional .................................................................................................................. 50
4.4 Rotores dobles................................................................................................................................... 53
4.4.1 Estudio de independencia de desfase en rotores dobles. ............................................................ 53
4.2.5 Análisis de rotores en contrarrotación. ......................................................................................... 58
4.5 Dimensionamiento de los rotores. .................................................................................................... 64
Capítulo 5. Conclusiones ................................................................................................................... 67
Literatura citada ......................................................................................................................................... 69

viii
Lista de figuras
1. Turbina de eje horizontal, tripala. ........................................................................................................... 6
2. Turbinas de eje vertical: a) Turbina Darrieus de alabes curvos. b) Turbina Darrieus de alabes rectos. c) Turbina tipo Savonius ............................................................................................................................ 7
3. Modelo simplificado de la turbina Savonius.......................................................................................... 12
4. Diagrama representando el flujo de aire a través del disco actuador. ................................................. 15
5. Comparación representativa de la altura de torre, diámetro de rotor y capacidad de generación (Manwell, McGowan, & Rogers, 2009). .............................................................................................. 18
6. Parque eólico tradicional. ...................................................................................................................... 22
7. Vista frontal de un rotor tipo Savonius. ................................................................................................ 26
8. Vista transversal de un rotor tipo Savonius con traslape ...................................................................... 26
9. Vista transversal de un rotor tipo Savonius con separación. ................................................................ 28
10. Ángulo de arco en un rotor Savonius. ................................................................................................. 28
11. A la izquierda el rotor Savonius bidimensional y a la derecha el rotor Savonius tridimensional. ....... 29
12. El rotor Savonius modificado por Blackwell. Bidimensional y tridimensional. ................................... 29
13. Rotor tipo Savonius modificado por Modi........................................................................................... 30
14. Dimensiones túnel 2D. ......................................................................................................................... 30
15. Dimensiones del túnel 3D. ................................................................................................................... 30
16. Malla de túnel y zonas de interfaz para simulaciones 2D. .................................................................. 33
17. Acercamiento a las mallas 2D de los rotores Savonius, Blackwell y Modi. ......................................... 34
18. Mallado 3D del túnel de viento y esfera de interfaz donde el rotor se encuentra encerrado. ........... 34
19. Mallado en los rotores singulares. ...................................................................................................... 35
20. Malla de túnel de viento e interfaces de los rotores dobles. .............................................................. 35
21. Mallas de los rotores en contra-rotación. ........................................................................................... 36
22. Localización de las fronteras en los casos 2D y 3D. ............................................................................. 36
23. Ajuste de curva de Weibull con k=1.837. ............................................................................................ 44
24. Rosa de los vientos para Ensenada, Baja California. ........................................................................... 44

ix
25. Comparación de mallas 2D. ................................................................................................................. 46
26. Malla triangular y malla cuadrada de mayor resolución. .................................................................... 46
27. a) Relación entre el coeficiente de sustentación. b) Coeficiente de momento promedio de cada rotor. ................................................................................................................................................... 49
28. Coeficiente de arrastre de rotores 3D. ................................................................................................ 51
29. Coeficiente de sustentación de rotores 3D. ....................................................................................... 51
30. a) Relación entre coeficiente de sustentación y arrastre. b) Coeficiente de momento de rotores 3D. c) Coeficiente de potencia de rotores 3D. .......................................................................................... 53
31. El coeficiente de arrastre para rotores dobles en desfase. ................................................................. 54
32. Coeficientes de arrastre para rotores dobles en desfase. ................................................................... 55
33. El coeficiente de sustentación para rotores dobles en desfase. ......................................................... 56
34. Coeficientes de sustentación totales resultantes de los diversos desfases. ....................................... 56
35. El coeficiente de momento para rotores dobles en desfase. .............................................................. 57
36. El coeficiente de momento para rotores dobles en desfase ............................................................... 58
37. Coeficiente de arrastre promedio del rotor Savonius en contrarrotación. ......................................... 60
38. Coeficiente de arrastre promedio para el rotor Blackwell en contrarrotación. .................................. 60
39. Coeficente de sustentación para un rotor Savonius en contrarrotación. ........................................... 61
40. Coeficente de sustentación para un rotor Blackwell en contrarrotación. .......................................... 61
41. Coeficiente de momento promedio de un rotor Savonius en contrarrotación. ................................. 62
42. Coeficiente de momento promedio de un rotor Blackwell en contrarrotación. ................................. 62
43. Coeficiente de potencia del sistema Savonius en contrarrotación y sus rotores. .............................. 63
44. Coeficiente de potencia del sistema Blackwell en contrarrotación y sus rotores. .............................. 63
45. Curva de potencia de generador de imanes permanentes SkyMAX. .................................................. 64

x
Lista de tablas
1. Producción de energía primaria en México. ............................................................................................. 3
2. Valores de las contantes C para el cálculo del factor de escala. ............................................................. 24
3. Medidas y proporciones de rotores. ....................................................................................................... 28
4. Configuración de malla para los rotores en 2D. ...................................................................................... 31
5. Configuración del mallado en simulaciones 3D singulares. .................................................................... 32
6. Configuración del mallado para las simulaciones dobles. ...................................................................... 32
7. Valores de referencia para las simulaciones 2D y 3D. ............................................................................ 40
8. Métodos de solución escogidos para las simulaciones. .......................................................................... 41
9. Estudios de dependencia y parámetros analizados. ............................................................................... 41
10. Resultados de las simulaciones a distintos grados por paso de tiempo. .............................................. 45
11. Comparación de los diferentes mallados con los resultados de Dobrev & Massouh. .......................... 46
12. Comparación de modelos de turbulencia y tipo de malla con resultados de Dobrev & Massouh (2011). ................................................................................................................................................. 47
13. Área de barrido para aerogeneradores en contrarrotación. ................................................................ 65
14. Dimensiones de rotores y número de aerogeneradores necesarios para generar 200 We. ................. 66

1
Capítulo 1. Introducción
En la actualidad, la mayor parte de la energía que se consume a nivel mundial se obtiene a partir
de combustibles fósiles (IEA, 2017). Estos combustibles a pesar de ser fáciles de transportar y de
contener una alta densidad energética son la mayor fuente de contaminación en el planeta, ya que su
combustión produce gases de efecto invernadero como el CO2 y CH4. Según cifras del Banco Mundial, en
el 2011 se emitieron 663 millones de toneladas equivalentes a CO2 de gases de efecto invernadero, que,
junto con un incremento de 1°C en la temperatura promedio del planeta, han causado sequías,
derretimiento gradual de los casquetes polares, aumento en los niveles del mar, así como tormentas y
huracanes más fuertes año con año, sumado a lo anterior, el incremento exponencial de la población
mundial ha aumentado la demanda de potencia y energía (European Commission, 2016; NASA and
Goddard Institute for Space Studies, 2016).
Para intentar solucionar los problemas del cambio climático y la demanda energética, han entrado en
vigor tratados internacionales como el Protocolo de Kioto y el Acuerdo de París que comprometen a los
países firmantes, a disminuir el uso de combustibles fósiles y aumentar el uso de energías renovables.
Estas fuentes de energía, surgen como una solución ante los problemas arriba mencionados, y son
aquellas que provienen de fuentes naturales prácticamente inagotables, ya sea por la inmensa cantidad
de energía que contienen o porque son capaces de regenerarse por medios naturales; entre ellas se
encuentran la energía eólica, geotérmica, hidroeléctrica, mareomotriz, solar, undimotriz y biomasa.
Las emisiones de gases contaminantes de las fuentes renovables de energía son pocas o nulas debido a
su construcción, transporte, instalación y mantenimiento. En el 2009 Mithraratne analizó las emisiones
de CO2 de un aerogenerador en Nueva Zelanda. Concluyó que la demanda de energía de la red de un
hogar promedio se puede reducir entre un 26% y 81% y que el tiempo de neutralización de emisiones
para su fabricación, transporte e instalación, se encuentra entre 9 a 15 años (Mithraratne, 2009).
Lo anterior demuestra el gran potencial de las fuentes de energía renovables para reducir las emisiones
de gases de efecto invernadero y frenar el cambio climático; de igual manera, representan una
oportunidad tanto para la industria como para la sociedad en general ya que ayudan a crear nuevos
empleos, reducir gastos y mejorar la calidad del aire. Según la Agencia Internacional de Energías
Renovables, alcanzar un 36% de participación de las energías renovables supondría un crecimiento del
1.1% del producto interno bruto mundial para el 2030 (equivalente a 1.3 millones de dólares), un 3.7%

2
de incremento en la calidad de vida y la creación de más de 24 millones de empleos (Ferroukhi et al.,
2016).
1.1 Planteamiento del problema
En México, la producción de energía eléctrica está concentrada en el uso de combustibles fósiles y se
divide de la siguiente manera: 55.60% de la energía proviene de centrales termoeléctricas, 30.4% de
plantas hidroeléctricas, 7.2% de centrales carboeléctricas, 3.8% de la planta nucleoeléctrica de Laguna
Verde, 2.6% de centrales geotérmicas y 0.2% de granjas eólicas. En la Tabla 1 se presentar un desglose
de la producción de energía en México, así como el porcentaje de variación entre los años 2014 y 2015.
Teniendo en cuenta lo anterior, el balance nacional de energía del 2016 proporcionado por la SENER dice
que:
“Al cierre de 2016, México presentó un índice de independencia energética equivalente a 0.84.
Es decir, se produjo 15.6% menos energía de la que se puso a disposición para las diversas
actividades de consumo dentro del territorio nacional. Durante los últimos diez años, este
indicador ha disminuido en promedio 4.3%.” (SENER, 2016).
Es por ello que se han presentado nuevas políticas que impulsan la producción de energías a partir de
fuentes renovables, lo cual ha permitido un aumento del 16.23% en la participación de energía solar y un
36.09% en la de energía eólica con respecto al 2014.
En el año 2017 México tenía 4.0 GW de potencia eólica instalada principalmente en Oaxaca en la región
de La Ventosa y se espera que se tengan instalados 12 GW para el año 2022 y se alcance una mayor
explotación en Baja California. La participación de las energías renovables a nivel doméstico, es aún
menor que en el sector industrial, las principales razones son los altos costos de los sistemas eólicos,
fotovoltaicos y la baja disponibilidad de recurso solar o eólico en algunas zonas. En el caso de los
sistemas eólicos, lo anterior representa un área de oportunidad para el estudio y desarrollo de sistemas
que operen a bajas velocidades de viento y sean capaces de alc anzar eficiencias de conversión similares
a los sistemas industriales.

3
A pesar de la modernización de los medios para la producción de energía eléctrica, en México 9.4
millones de personas se encuentran en situación de pobreza extrema, las cuales cuentan solamente con
fuentes de energía como leña, carbón o estiércol para satisfacer sus necesidades, además de carecer de
acceso a la red eléctrica por lo que no pueden acceder a servicios como iluminación, refrigeración y
bombeo de agua. Desde hace muchos años, se ha visto lo importante de la relación entre el acceso a la
electricidad y el desarrollo humano, así se comprobó que una de las consecuencias de la situación actual
sobre la falta de acceso a la energía fue la imposibilidad de cumplir los Objetivos de Desarrollo del
Milenio, es decir que sin acceso a la energía fue imposible conseguir reducir la pobreza extrema a la
mitad para el año 2015.
Tabla 1. Producción de energía primaria en México.
2014 [Petajoules] 2015 [Petajoules] Variación [%]
Total 8854.25 8261.03 -6.7
Carbón 303.73 287.69 -5.28
Hidrocarburos 7782.96 7203.85 -7.44
Nucleoenergía 100.6 120.41 19.69
Renovables 666.97 649.09 -2.68
Hidroenergía 140.01 111.21 -20.57
Geo energía 129.88 134.53 3.58
Solar 8.73 10.15 16.23
Eólica 23.13 31.48 36.09
Biogás 1.93 1.87 -3.01
Biomasa 363.28 359.84 -0.95
1.2 Justificación
El sistema energético mundial actual no es sustentable debido a que los combustibles fósiles son finitos,
su regeneración lleva demasiado tiempo, generan contaminantes nocivos para la salud de los seres vivos
y modifican considerablemente el clima del planeta. Por ello es necesario crear un nuevo sistema basado
en fuentes de energía renovables que ayuden a mitigar el cambio climático, reducir la sobre explotación
de los combustibles fósiles y garantizar el acceso a la energía para futuras generaciones. Aunque existen
parques eólicos y solares de gran capacidad, en el sector doméstico aun es poca la participación de las
4
fuentes renovables de energía, específicamente la eólica. Para mejorar esta situación, se deben poder
superar limitantes como la incapacidad de aprovechar bajas velocidades de viento y la complejidad en el
mantenimiento de los aerogeneradores, esto proporcionaría una nueva opción para brindar energía
eléctrica a personas que habitan en zonas alejadas de la red y/o en situación de pobreza extrema.
Adicionalmente al aumentar el uso de las energías renovables disminuirá la dependencia energética de
México.
Por lo anterior, en este trabajo se propone el estudio de un aerogenerador tipo Savonius en contra-
rotación, el cual consiste en una turbina de eje vertical que incluye dos rotores configurados para rotar
de manera opuesta; la rotación relativa duplica la velocidad efectiva de rotación y permite que el
dispositivo gire a bajas velocidades de viento y logre una mayor generación de potencia comparado con
un sistema de un solo rotor.
1.3 Objetivos.
1.3.1. Objetivo general.
Diseñar y simular un aerogenerador Savonius en contra-rotación.
1.3.2 Objetivos específicos.
Realizar un estudio de disponibilidad de viento para la ciudad de Ensenada, Baja California.
Analizar diferentes tipos de rotores y seleccionar tres propuestas para su estudio.
Realizar estudios de coeficiente de arrastre, sustentación, momento y potencia para los rotores
seleccionados con ayuda de Ansys Fluent.

5
Capítulo 2. Marco teórico
Un aerogenerador es un dispositivo que transforma la energía cinética del viento en energía
eléctrica, estos equipos pueden ser clasificados de 3 maneras distintas: la orientación de su eje de
rotación (horizontal o vertical), la fuerza dominante que lo hace girar (arrastre o sustentación) y/o la
capacidad de generación de energía (micro, pequeña, mediana o gran escala).
2.1 Turbinas de eje vertical y eje horizontal.
Esencialmente existen dos tipos de turbinas eólicas según la orientación de su eje de rotación: Las
turbinas de eje vertical (VAWT’s por sus siglas en inglés) y las turbinas de eje horizontal (HAWT’s por sus
siglas en inglés.) De todas las turbinas eólicas las HAWT’s son las más populares entre todos los diseños,
gracias a que usualmente alcanzan eficiencias entre el 30% y 40%, mientras que en las turbinas VAWT
este parámetro es inferior al 40% (Akwa et al, 2012).
En las HAWT, el eje de rotación está posicionado de manera horizontal y paralela al suelo, la mayoría de
ellas son del tipo sustentación lo que las hace muy susceptibles a cambios en su diseño y rugosidad de la
superficie, adicionalmente, requieren de un mecanismo que haga girar la nacela en dirección del viento y
es una de las razones por la cual estas turbinas no fueron populares a principio del siglo XX cuando se
diseñaron los primeros prototipos. El sistema de orientación en HAWT pequeñas se reduce a un sistema
de rodamientos conectado entre la torre y la nacela; una cola con una aleta es montada en la parte
trasera, la cual produce la fuerza necesaria para mover la turbina hacia la dirección del viento; este tipo
de orientación es conocido como sistema pasivo. En turbinas cuya capacidad está en el rango de
Megawatts, las HAWT’s necesitan un sistema de orientación activo; estos sistemas están usualmente
compuestos por un sensor que detecta la dirección del viento, y un servo motor que hace rotar la
turbina en dirección del viento. Un ejemplo de estas turbinas se aprecia en la Figura 1 (Hau, 2015).

6
Figura 1. Turbina de eje horizontal, tripala.
Las primeras turbinas desarrolladas fueron de eje vertical, debido a que eran más fáciles de construir y
no requerían de un mecanismo de orientación. A pesar de esas ventajas no lograron un nivel de
desarrollo avanzado que permitiera su implementación masiva, actualmente, los tres diseños más
populares son la Savonius, la Darrieus de palas curvas y la Darrieus de palas rectas como se muestran en
la Figura 2.
Las VAWT’s tipo Darrieus constan de dos o más palas que están unidas a un eje vertical. Estas palas son
curvas o rectas y tienen un perfil aerodinámico que produce una fuerza de sustentación cuando se
expone al viento, esta fuerza genera un par a lo largo del eje y provoca que el rotor gire. Las turbinas
Darrieus de perfiles curvos (Figura 2a) están sometidas a menores esfuerzos de flexión que los de palas
rectas, por lo que son más usadas comercialmente para aplicaciones de alta potencia. Los rotores
Darrieus de palas rectas (Figura 2b) pueden llegar a tener un sistema de guiado del ángulo de ataque
que permite solucionar, hasta cierto punto, el problema de arranque que se presenta en los rotores
Darrieus de perfiles curvos, sin embargo es demasiado complicado para ponerlo en práctica en un
sistema de baja potencia (Batista et al., 2015).

7
Figura 2. Turbinas de eje vertical: a) Turbina Darrieus de alabes curvos. b) Turbina Darrieus de alabes rectos. c)
Turbina tipo Savonius.
En la Figura 2c se aprecia la turbina Savonius que fue inventada por el arquitecto finlandés Sigurd
Johannes Savonius en 1924 tomando como inspiración el rotor Flettner, sin embargo, fue patentada
hasta 1929. Esta turbina está formada por dos mitades semicirculares (conocidas como cubetas o
cazoletas), colocadas a lo largo de un plano central y desplazadas para formar una “S”, cuando la parte
cóncava está en contra del viento, se genera fuerza de arrastre que hace girar al rotor. Las turbinas
Savonius tienen una eficiencia de conversion inferior al 25% por lo que no han sido exitosas
comercialmente, sin embargo, tienen ventajas tales como una construcción simple, niveles bajos de
ruido al girar, velocidad de rotación lenta y desgaste reducido en sus partes moviles, lo que justifica su
uso en aplicaciones de bajo consumo eléctrico. Savonius reportó una eficiencia máxima del 31%, sin
embargo, hasta la fecha no se ha logrado reproducir estos resultados (Savonius, 1931; Golecha et al.,
2012).
En 1976 Shankar, estudió en un túnel de viento 4 diferentes modelos de rotores Savonius de dos
cazoletas con traslapes con respecto al diámetro de 0.5, 0.1, 0.15 y 0.2, de acuerdo a los resultados
obtenidos el autor concluyó que la eficiencia de los sistemas aumenta mientras más turbulento es el
flujo de viento y que de los cuatro modelos probados, el más eficiente correspondió a un traslape de
0.18 (Shankar, 1976). Sheldahl et al. (1978) obtuvieron resultados similares, pero reportaron una
eficiencia mayor que la obtenida por Shankar, con un traslape de 0.15 y un TSR de 0.9.
Otros autores han realizado modificaciones a la forma de las cazoletas del rotor Savonius convencional
para mejorar el desempeño. Khan (1978) estudió el efecto de la forma del rotor, traslape y separación de

8
5 rotores de 2 cazoletas; en este trabajo se logró obtener eficiencias entre el 30% y 35%. Modi et al.
(1990) estudiaron la influencia de parámetros geométricos tales como grados de arco y una sección
recta sólida para separar las cubetas obteniendo una eficiencia del 32%. Moutsoglou & Weng (1995)
examinaron el desempeño del rotor Benesh, el cual es un rotor tipo Savonius que incorpora una sección
cruzada modificada y reportaron que un momento positivo se generaba sin importar el ángulo en el que
encontrara el rotor, lo que mejoraba las condiciones iniciales del rotor para empezar a girar. Kamoji
(2009) experimentó con un rotor Savonius helicoidal para reducir la variación en el par inicial, probó el
rotor con una torsión a 90o y obtuvo una eficiencia del 20% para una relación de la velocidad de rotación
y la velocidad de viento de 0.71.
En algunas propuestas, dos o más rotores se colocan uno sobre el otro para suavizar las fluctuaciones del
par durante la rotación mejorando así las características de inicio de rotación del rotor. Ushiyama &
Nagai (1989) reportaron que para la misma área, un rotor de dos niveles y un desfase de 90° tiene una
mejora del 2% de fuerza par y un aumento en la eficiencia de 2% a 3%. Kamoji et al. (2008) realizaron
experimentos alcanzando una eficiencia máxima de 15.5%, 12.5% y 12.2% para rotores Savonius de uno,
dos y tres niveles respectivamente. Los autores concluyeron que al aumentar niveles, manteniendo la
misma área transversal del rotor, disminuye la eficiencia, pero el coeficiente de momento se mantiene
constante permitiendo tener mejores características para empezar a girar por si solos.
La potencia de un rotor puede ser aumentada por medio del uso de paletas guía, placas desviadoras y
ranuras que ayudan a mejorar el desempeño de potencia del rotor reduciendo la resistencia al viento en
la cazoleta retornante. Ogawa (1989) investigó el uso de una placa desviadora para mejorar la eficiencia
y poder controlar la velocidad rotacional, reportó que la eficiencia aumenta en un 30% con la placa a una
posición de 30° y a 0.5 veces el diámetro del rotor de alejada de la cazoleta retornante. Huda & Selim
(1992) investigaron el desempeño de un rotor tipo Savonius con y sin placa desviadora en un túnel de
viento, obteniendo una eficiencia del 20% cuando la placa desviadora se encontraba a 0.5 veces el
diámetro del rotor de la cazoleta retornante y en un ángulo de 35°, condiciones similares a las
reportadas por Ogawa. Posteriormente en la investigación llevada a cabo por Shaughnessy & Probert
(1992), se investigaron rotores con y sin un deflector con forma de “V”. Concluyeron que para una
velocidad de viento de 4 m/s, un rotor con deflector mejora la potencia y el par de torsión en 19.7% y
23.2% respectivamente, respecto a un rotor convencional.
En otras propuestas se han utilizado dispositivos de concentración para aumentar la velocidad del
viento, entre los estudios que reportan el desempeño de rotores Savonius con concentradores, destaca

9
el desarrollado por Sabzevari (1977), quien investigó el desempeño de un rotor Savonius con y sin
concentrador y difusor. El autor reportó que el uso del concentrador produjo un incremento del 200% al
300% en la eficiencia y mediante la adición del difusor se incrementó la eficiencia en 48.5% más.
Sivasegaram (1979) presentó una investigación experimental y determinó los parámetros de diseño
óptimos para un sistema de concentración. Sus resultados muestran que con este tipo de sistemas la
potencia aumenta en un 150% con respecto a un rotor Savonius típico.
Shikha (2005) investigó el uso de toberas con un rotor de 6 cazoletas, de acuerdo a los resultados
obtenidos, el autor concluye que la eficiencia es una función del número de cazoletas y las dimensiones
de la tobera y el valor máximo alcanzado fue de 53%. Irabu & Roy (2007) llevaron a cabo experimentos
para mejorar y ajustar la potencia del rotor Savonius y propusieron un método para proteger al rotor de
vientos fuertes. Durante sus experimentos, el rotor Savonius fue colocado en una caja que podía variar
el área de entrada de viento por medio de una compuerta de tal manera que ajustaba el flujo de aire
incidente en la turbina; la eficiencia máxima para rotores de 2 y 3 cazoletas fue de 27.6% y de 24.6%
respectivamente. Altan et al. (2008) probaron un arreglo de cortina que se extendía alrededor del rotor,
con este arreglo se buscaba reducir la resistencia en la parte posterior de la cazoleta y al mismo tiempo,
concentrar el viento en la sección frontal de la cazoleta. Concluyeron que el uso de toberas mejora la
eficiencia de los rotores Savonius y reportaron un incremento en la eficiencia del 38.5% comparado a un
rotor Savonius normal.
La contrarrotación en aerogeneradores es un concepto relativamente nuevo, el uso de dos rotores que
giran en sentidos opuestos permite aumentar las revoluciones en el generador, incrementando la
generación de energía. Dentro de los pocos trabajos existentes en el área, destaca el de Mitulet et al.
(2015), quienes desarrollaron un generador de eje horizontal con dos rotores en donde se permitía el
libre movimiento del rotor y estator, con la configuración propuesta obtuvieron 60% más de energía que
la obtenida respecto a un solo rotor, este incremento se debía principalmente al aprovechamiento de la
estela de viento desacelerado que deja el primer rotor. Chaichana & Chaitep (2015) construyeron un
aerogenerador tipo Savonius de dos rotores en contra rotación unido por cuatro engranes cónicos que
transmiten el par a un solo eje, de esta manera lograron disminuir la velocidad de inicio a tan sólo 1.3
m/s y obtuvieron una eficiencia de generación del 14%.
En cuanto a la aplicación de la Dinámica de Fluidos Computacional (CFD) para el análisis de estos
sistemas, es alrededor de 1985 cuando se empiezan a escribir los primeros programas aplicados a
aerogeneradores de eje vertical. Rajagopalan & Fanuccit (1985) realizaron uno de los primeros modelos

10
CFD basado en diferencia finitas, el cual considera el movimiento de las aspas o alabes promediado en el
tiempo y concluyeron que los campos de fluido podían llegar a ser estables y convergentes
computacionalmente.
En 1988, Wilcox (1988) llevó a cabo una revisión de los modelos de turbulencia k-ϵ y k-ω para encontrar
la variables y aproximaciones óptimas usando computaciones numéricas. Demostró que los modelos son
imprecisos generalmente para las capas límites y que se presentan problemas de convergencia cuando
hay gradientes de presión adversos. Esta revisión llevó al desarrollo de los modelos como el k-ϵ
realizable y k-ω SST que mejoran o eliminan los problemas vistos por Wilcox; además ayudan a mejorar
los resultados en simulaciones de rotores y otras máquinas.
Rajagopalan et al. (1990) llevaron a cabo simulaciones bidimensionales de grupos de hasta 20
aerogeneradores de eje vertical y observaron que el posicionamiento relativo de las turbinas afectó su
eficiencia, llegaron a concluir que se puede mejorar el desempeño y eficiencia controlando la orientación
angular de las turbinas.
En 1993, Ishimatsu & Shinohara realizaron una de las primeras simulaciones CFD de un rotor Savonius
resolviendo las ecuaciones de Navier-Stokes. Los resultados reportados indicaron que la eficiencia
máxima corresponde a un intervalo de razón de velocidad de punta de pala de 0.75 a 1.0 y también
encontraron que un desfase entre las cubetas del rotor incrementa su eficiencia.
Menter (1994) desarrolló dos modelos de turbulencia basados en el modelo k-ω de Wilcox. El primer
modelo conocido como Baseline (BSL) evita la sensibilidad del flujo libre usando el modelo k-ω en las
zonas cercanas al rotor y en las zonas alejadas el k-ϵ. El segundo modelo surge de modificaciones al
modelo BSL y toma en cuenta los efectos de transporte de esfuerzos cortantes mejorando las
predicciones con flujos de gradientes de presión adversos, este modelo es conocido como el modelo de
transporte de esfuerzos cortantes (SST).
En el trabajo desarrollado por Rajkumar et al. (2005) investigaron la evolución de los contornos de flujo
alrededor de un rotor Savonius a una velocidad de viento de 10 m/s. Ellos observaron que los flujos
turbulentos no son simétricos, además de que a un ángulo de ataque de 90o el viento fluye verticalmente
causando vórtices en las puntas de las cubetas debido a la rotación.

11
Zullah et al. (2010) Utilizaron un rotor Savonius helicoidal para la conversión de energía undimotriz,
probaron 3 modelos independientes de la geometría de una cámara de agua con un rotor Savonius
tripala convencional y un Savonius tripala helicoidal, llevaron a cabo sus experimentos en Ansys CFX e
hicieron simulaciones utilizando del modelo k-ϵ y sus resultados indicaron que los modelos desarrollados
son buenos para los flujos de agua tanto en la cámara como en la turbina.
Kang et al. (2010) llevaron a cabo la simulación de un rotor helicoidal con placas circulares a los
extremos y una en medio, usando el modelo Spalart-Allmaras de una ecuación, concluyeron que la
fuerza par es más favorable durante el ciclo completo de rotación y que además hay una gran diferencia
de presión generada entre la parte cóncava y convexa cuando el par es máximo mientras que la
diferencia es mínima cuando el par es mínimo.
Yaakob et al. (2010) demostraron que el uso de una turbina Savonius en eje vertical para el
aprovechamiento de la energía marina tiene potencial para corrientes de baja velocidad. Una razón de
traslape de 0.21 demostró ser la más eficiente y que el coeficiente de momento siempre fue positivo.
Mohamed et al. (2010) hicieron simulaciones en rotores Savonius de 2 y 3 cubetas con una librería de
optimización propia llamada OPAL y Fluent®, ambos acoplados con algoritmos evolutivos y obtuvieron
resultados que indican que hay un incremento de hasta el 27% en el coeficiente de potencia en ambos
rotores y aquellos con 2 cubetas son mejores a los de 3.
Más tarde Mohamed et al. (2011) realizaron simulaciones con rotores cuyas cubetas fueron modificadas
en excentricidad y circunferencia, utilizaron la librería OPAL de optimización y Fluent y obtuvieron un
incremento del 40% en el coeficiente de potencia a 0.7 de relación entre la velocidad de rotación sobre
la velocidad del viento y un incremento promediado del 30% en el rango operacional del rotor, además,
la fuerza par fue positiva a cualquier ángulo y suficiente para hacer girar el rotor.
2.2 Rotores del tipo arrastre y sustentación
Cuando un objeto se pone en contra de un fluido, se generan fuerzas sobre su superficie conocidas como
fuerzas aerodinámicas. La fuerza paralela a la corriente de fluido es conocida como fuerza de arrastre

12
(𝐷) mientras que la fuerza perpendicular es conocida como sustentación (𝐿). Las magnitudes de estas
fuerzas están dadas por las siguientes ecuaciones (Manwell et al., 2009):
𝐷 = 𝐶𝐷
𝜌
2𝑎𝑢∞
2
(1)
𝐿 = 𝐶𝐿
𝜌
2 𝑎 𝑢∞
2 (2)
Donde 𝑎 es el área proyectada del objeto, 𝜌 es la densidad del aire, 𝑢 es la velocidad incidente del viento
y las constantes 𝐶𝐷 y 𝐶𝐿 son los coeficientes de arrastre y sustentación respectivamente, los cuales son
constantes de proporción; generalmente, conforme 𝐶𝐿 es mayor y 𝐶𝐷 es menor, la calidad aerodinámica
es mejor.
La turbina Savonius es considerada del tipo arrastre debido a que la fuerza de arrastre es la dominante y
provoca el inicio de la rotación (Manwell et al., 2009). En este tipo de turbinas, el par y la potencia
mecánica se pueden estimar usando un modelo simplificado como el que se muestra en la Figura 3.
Figura 3. Modelo simplificado de la turbina Savonius.
Asumiendo que el rotor tiene un radio 𝑅 y que gira con una velocidad angular 𝜔. La velocidad
circunferencial del rotor es igual a:

13
𝑢 = 𝜔𝑅 (3)
Las velocidades relativas del viento 𝑢𝑟1 y 𝑢𝑟2 en la primera y segunda cazoleta están dadas por las
siguientes expresiones respectivamente:
𝑢𝑟1 = 𝑢∞ − 𝑢 (4)
𝑢𝑟2 = 𝑢∞ + 𝑢 (5)
Las fuerzas de arrastre resultantes 𝐷1 y 𝐷2 en las cazoletas están dadas por:
𝐷1 = 𝐶𝐷1
1
2𝑎 𝑢𝑟1
2 = 𝐶𝐷1
𝜌
2𝑎(𝑢∞ − 𝑢)2 = 𝐶𝐷1
𝜌
2𝑎𝑢∞
2 (1 −𝑢
𝑢∞)
2
(6)
𝐷2 = 𝐶𝐷2
1
2𝑎𝑢𝑟2
2 = 𝐶𝐷2
𝜌
2𝑎(𝑢∞ + 𝑢)2 = 𝐶𝐷2
𝜌
2𝑎𝑢∞
2 (1 −𝑢
𝑢∞)
2
(7)
Donde 𝑎 denota el área proyectada de las cazoletas. El par aerodinámico a lo largo del eje central se
calcula de la siguiente manera:
𝜏 = (𝐷1 − 𝐷2) ∗ 𝑅 =
𝜌
2𝑎𝑢∞
2 𝑅 (𝐶𝐷1 (1 −𝑢
𝑢∞)
2
− 𝐶𝐷2 (1 + 𝑢
𝑢∞)
2
) (8)
La potencia mecánica generada por la turbina se obtiene por medio de las siguientes expresiones:
𝑃 = 𝜏 ∗ 𝜔 =
𝜌
2𝑎𝑢∞
2 𝜔𝑅 (𝐶𝐷1 (1 −𝑢
𝑢∞)
2
− 𝐶𝐷2 (1 + 𝑢
𝑢∞)
2
) = 𝐶𝑃
𝜌
2𝑎𝑢∞
3 (9)
𝐶𝑃, conocido como el coeficiente de potencia, es la razón de energía extraída del viento por el rotor,
puede apreciarse en la ecuación 9 que la potencia mecánica producida por el rotor es proporcional al
área proyectada y al cubo de la velocidad del viento.

14
Las turbinas de eje vertical Darrieus y todas aquellas de eje horizontal, son máquinas basadas en la
fuerza sustentación, el proceso para obtener las características aerodinámicas de este tipo de turbinas
es complicado, para llevar a cabo su estudio, comúnmente se utiliza la dinámica de fluidos
computacional, sin embargo, hay modelos como el de teoría del disco actuador, modelo del cilindro
vórtice del disco actuador y la teoría del rotor de alabe. Dentro de esos, el más conocido es el de teoría
del disco actuador, ya que fue utilizado para calcular el limite teórico de eficiencia de una turbina,
conocido como Limite de Lanchester-Betz.
2.2.1 Limite de Lanchester-Betz
El límite de Lanchester-Betz define la máxima potencia que una turbina logra extraer de una corriente
de viento y se deriva de la primera ley de la termodinámica, así como de la conservación de masa y
momento (Manwell et al., 2009). Tomando como referencia la Figura 4, si se considera un flujo de viento
a través de un disco actuador, tiene una velocidad de entrada 𝑢1, una velocidad de salida 𝑢2, y una área
transversal 𝐴1. El disco extrae la energía cinética del viento por lo que este es desacelerado a la
velocidad 𝑢2. Dado que el flujo está compuesto de un fluido incompresible, el área transversal del flujo
debe expandirse a un área 𝐴2 para acomodar el flujo ahora lento, adicionalmente, debido a una caída en
la presión estática a través del disco actuador, el flujo de salida continua expandiéndose hasta igualarse
con la presión atmosférica cuando se alcanza el equilibrio. Más alejado del disco actuador, el área
transversal aumenta a 𝐴3 y la velocidad del viento es 𝑢3.
Usando la ecuación de continuidad, podemos establecer que el flujo másico ṁ se define como:
ṁ = ρu1A1 = ρu2A2 = ρu3A3 (10)
Donde ρ denota la densidad del aire. La potencia total disponible del viento a velocidad 𝑢1, que atraviesa
el área transversal 𝐴2, está dada por:
Pmax =
1
2ṁ2u1
2 =1
2(ρA2u1)u1
2 =1
2ρA2u1
3 (11)

15
Figura 4. Diagrama representando el flujo de aire a través del disco actuador.
mientras que la máxima potencia extraíble por la turbina se calcula como:
Pext =
1
2ṁu1
2 −1
2ṁu3
2 =1
2ρA2u2(u1
2 − u32)
(12)
usando la ecuación de Bernoulli, se establece lo siguiente:
1
2𝜌 + 𝑝∞ =
1
2𝜌𝑢2
2 + 𝑝+ (13)
1
2𝜌 + 𝑝− =
1
2𝜌𝑢2
2 + 𝑝_∞ (14)
De las ecuaciones 22 y 23, se deriva:
𝑝+ − 𝑝− =
1
2𝜌𝑢1
2 −1
2𝜌𝑢3
2 (15)
Usando la ecuación de momento se sabe que la fuerza de empuje axial 𝐹 = (𝑝+ − 𝑝−)𝐴2 ejercida por el
fluido sobre la turbina, es igual al cambio en el momento:

16
(p+ − p−)A2 = ṁ(u1 − 𝑢3) (16)
O
(𝑝+ − 𝑝−)𝐴2 = 𝜌𝐴2𝑢2(𝑢1 − 𝑢3) (17)
De las ecuaciones 16 y 17 se desarrolla:
𝜌𝐴2𝑢2(𝑢1 − 𝑢3) = 𝐴2 (
1
2𝜌𝑢1
2 −1
2𝜌𝑢3
2) (18)
Esto implica que:
𝑢2 =
1
2(𝑢1 + 𝑢3)
(19)
Como se explica en la sección previa, el coeficiente de potencia 𝐶𝑃 está definido como:
𝐶𝑝 =𝑃𝑒𝑥𝑡
𝑃𝑚𝑎𝑥=
12 𝜌𝐴2𝑢2(𝑢1
2 − 𝑢32)
12
𝜌𝐴2𝑢12
(20)
𝐶𝑃 =
14
𝜌𝐴2(𝑢1 + 𝑢3)(𝑢12 − 𝑢3
2)
12
𝜌𝐴2𝑢13
(21)
𝐶𝑝 =
1
2(1 +
𝑢3
𝑢1) (1 −
𝑢32
𝑢12)
(22)
Siendo, 𝑢3
𝑢1= 𝑦
𝐶𝑝 =
1
2(1 + 𝑦)(1 − 𝑦2)
(23)

17
El valor máximo del coeficiente de potencia ocurre cuando
𝑑𝐶𝑝
𝑑𝑦= 0
(24)
𝑑𝐶𝑃
𝑑𝑦=
1
2(1 − 𝑦2) +
1
2(1 + 𝑦)(−2𝑦)
(25)
1
2(1 + 𝑦)(1 − 3𝑦) = 0
(26)
Y como, 𝑦 =𝑢3
𝑢1≠ −1
𝑦 =
1
3
(27)
Esto da el valor máximo del coeficiente de potencia:
𝐶𝑃𝑚𝑎𝑥 = 𝐶𝑝 (𝑦 =
1
3) =
16
27≈ 0.592
(28)
2.3 Clasificación de turbinas por su tamaño.
Los aerogeneradores se clasifican por su tamaño y/o capacidad de producción de energía de
acuerdo al siguiente orden (Tong, 2002):
i. Micro escala: <3 kW.
ii. Pequeña escala: 3 kW a 30Kw.
iii. Gran escala: 200kW a 1.5 MW.
iv. Megawatt: >1.5 MW.
Las microturbinas suelen ser usadas en lugares apartados de la red eléctrica, normalmente para
aplicaciones de poca demanda como: alumbrado público y bombeo de agua. Debido a que estos
18
sistemas tienen la capacidad de operar a velocidades de viento relativamente bajas y pueden ser
instalados en casi cualquier parte del mundo.
Las turbinas de pequeña escala se han utilizado desde ya hace tiempo en hogares, granjas, así como en
aplicaciones especializadas como bombeo de agua y torres de telecomunicaciones en zonas rurales. Una
distribución inteligente de este tipo de turbinas puede incrementar el suministro de energía en algunas
regiones mientras que, a la par, retrasa o evita la necesidad de incrementar la capacidad de las líneas de
transmisión.
La tecnología de gran escala es la más usada en aplicaciones conectadas o no a la red, las turbinas de
hasta 10 MW se han convertido en el estándar en los parques eólicos. Turbinas de más de 10 MW son
referidas como “ultra grandes” y aún se encuentran en etapa de investigación y desarrollo (Tong, 2002).
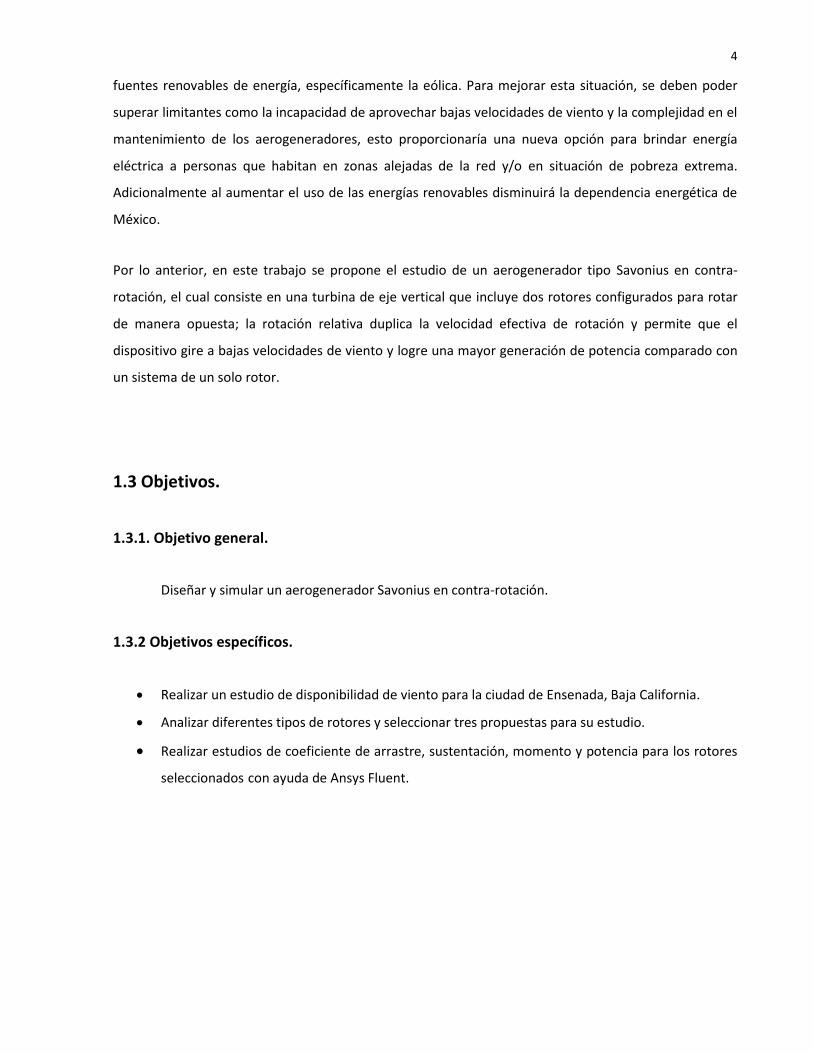
En la Figura 5 se muestra el crecimiento progresivo de las turbinas eólicas. Todas las turbinas tienen
parámetros que describen su ambiente de trabajo, forma y eficiencia. Las siguientes características
describen a grandes rasgos cualquier turbina sin importar si es de eje vertical u horizontal.
Figura 5. Comparación representativa de la altura de torre, diámetro de rotor y capacidad de generación (Manwell et al., 2009).

19
La razón de velocidad de punta (TSR): usualmente referida como 𝜆 , es un parámetro
adimensional que expresa la razón de la velocidad de rotación entre la velocidad de flujo libre.
𝑇𝑆𝑅 =𝜔𝑅
𝑢∞ (29)
Donde 𝜔 es la velocidad angular de la turbina, R es el radio de la turbina y U∞ es la velocidad de
flujo libre. Una razón de velocidad de punta debe ser escogida para que la turbina trabaje. Esta
elección depende no solo de la velocidad de flujo libre, sino también del generador disponible;
para escoger la TSR apropiada, se obtiene usualmente una curva CP vs TSR de esta manera se
identifica fácilmente la máxima eficiencia del rotor y las revoluciones por minuto a las que esto
ocurre.
El número de Reynolds (𝑅𝑒): está definido como la razón de las fuerzas inerciales a las fuerzas
viscosas, cuantificando así de esta manera la importancia estas dos fuerzas para las condiciones
dadas de un flujo.
Es utilizado para determinar la similitud dinámica entre dos diferentes casos de flujo de fluido, así
como para caracterizar los diferentes regímenes dentro de un fluido similar, como laminar o
turbulento.
a) Flujo Laminar: Esta dominado por las fuerzas viscosas, esto ocurre a números de
Reynolds bajos. Está caracterizado por líneas de flujo paralelas con líneas de flujo más
rápidas al centro que aquellas cercanas a las paredes de donde está contenido el flujo,
provocando así una proyección parabólica.
b) Flujo turbulento: Es dominado por las fuerzas inerciales, esto ocurre a altos valores del
número de Reynolds y que tiende a provocar remolinos caóticos, vórtices y otras
inestabilidades en el flujo.
De esta manera:
𝑅𝑒 =
𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑖𝑛𝑒𝑟𝑐𝑖𝑎𝑙𝑒𝑠
𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑣𝑖𝑠𝑐𝑜𝑠𝑎𝑠=
𝜌𝑢𝑐
𝜇=
𝑢𝑐
𝜈
(30)

20
Donde ρ es la densidad del fluido, u es la velocidad media del objeto relativo al fluido, c es la
cuerda del perfil aerodinámico o radio de la cazoleta, μ es la viscosidad dinámica de fluido y 𝜈 es
la viscosidad cinemática del fluido.
El coeficiente de potencia (𝐶𝑝) es un parámetro adimensional, que expresa la cantidad de
potencia que una turbina es capaz de extraer del viento. Por lo tanto, Cp es la razón de la
potencia extraída del viento con respecto a la potencia disponible.
La potencia generada por la energía cinética del viento está dada por la ecuación:
𝑃𝑣 =
1
2𝜌𝑆𝑈∞
3 (31)
Donde 𝑆 es el área del rotor.
La potencia extraída de la turbina está dada como:
𝑃𝑇 = 𝑀𝜔 (32)
𝑀 es el momento total generado por la turbina y se combinan las ecuaciones 3 y 4 para
conseguir la ecuación del coeficiente de potencia:
𝐶𝑝 = 𝑃𝑇
𝑃𝑣 =
𝑀𝜔
12 𝜌𝑆𝑈∞
3
(33)
Como ya se dijo anteriormente, una curva de potencia Cp vs λ, es obtenida para identificar el
TSR al que la turbina es más eficiente. El valor de 𝐶𝑝 sería de 0.592 en un caso ideal.
El coeficiente de momento o 𝐶𝑚 es una variable adimensional relacionada directamente a la
fuerza par, la cual hace girar al rotor como respuesta a la fuerza que el viento ejerce en los
alabes. Su expresión está dada por la siguiente ecuación:

21
𝐶𝑚 =
𝑀
𝑞∞𝑆𝑙 =
𝑀
12
𝜌𝑈∞2 𝑆𝑙
(34)
En la ecuación la expresión 𝑞∞ = 1
2𝜌𝑈∞
2 es la presión dinámica, l es la longitud de referencia.
Tomando en cuenta esta definición así como la definición del coeficiente de potencia, se puede
obtener una relación entre ambas. Remplazando la expresión 𝑀 en el coeficiente de potencia
por la del coeficiente de momento se obtiene la siguiente ecuación:
𝐶𝑝 = 𝐶𝑚
𝜔𝑙
𝑈∞
(35)
Y sabiendo que 𝑙 corresponde al radio 𝑅. Se concluye que:
𝐶𝑝 = 𝐶𝑚
𝑅𝑙
𝑈∞= 𝐶𝑚𝜆
(36)
De esta manera, con esta relación se obtiene de manera sencilla el coeficiente de potencia.
La solidez es otro parámetro adimensional, y representa la fracción del área de barrido frontal
de la turbina eólica que de hecho es cubierta por las palas.
Está definido por la siguiente ecuación:
𝜎 =
𝑁𝑐
𝑑
(37)
𝑁 representa el número de alabes, cazoletas o palas y d es el diámetro del rotor.

22
2.4 Parques eólicos.
Un parque o granja eólica se define como un grupo de 10 o más aerogeneradores que están
interconectados eléctricamente (Figura 6), fueron desarrollados a finales de los años setenta en
California y posteriormente en Europa. Los aerogeneradores se colocan a una distancia adecuada entre
ellos para que la turbulencia generada por cada aerogenerador no interfiera en el desempeño del resto.
Las mejores zonas para la instalación de parques eólicos son las regiones costeras que presentan
velocidades de vientos constante y las planicies que tienen pocos obstáculos.
Figura 6. Parque eólico tradicional.
23
Capítulo 3. Metodología
3.1 Análisis de disponibilidad de viento.
Uno de los aspectos más importantes a considerar antes de la instalación de un aerogenerador o
un parque eólico, es el análisis de disponibilidad de recurso eólico, el cual se utiliza para determinar la
constancia, dirección y velocidad del viento y con ellos, determinar el factor de planta y el tipo de
aerogenerador que puede ser instalado en dicho lugar. Para altas velocidades de viento se utiliza la
distribución de probabilidad de Rayleigh, mientras que para bajas velocidades de viento se utiliza la
distribución de probabilidad de Weibull, la cual es una variación de la distribución de Pearson y es la
empleada en este proyecto (Wood, 2011). La función de densidad de probabilidad indica la fracción de
tiempo o probabilidad para una velocidad de viento y es calculada por medio de la siguiente ecuación.
𝑓(𝑣) = 𝑘
𝑐 (
𝑣
𝑐 )
𝑘−1
𝑒 [ − (
𝑣𝑐
)𝑘
]
(38)
Por otro lado, la función de distribución acomulada está dada por la ecuación:
𝐹(𝑣) = 1 − 𝑒[−(
𝑣𝑐
)𝑘
]
(39)
Donde 𝑘, siendo el factor de forma, es un índice de disipación de datos así como la regularidad con la
que se da la velocidad promedio (ecuación 40), y 𝑐 el factor de escala que representa a la velocidad
promedio (m/s) (Anderson, 2013):
𝑘 = (𝜎
𝑉𝑚)
−1.086
(40)
𝜎 es la desviación estándar y 𝑉𝑚 es la velocidad promedio del área de estudio.
𝑐 ≅𝑉𝑚
𝐶0 + 𝐶1𝑥 + 𝐶2𝑥2 + 𝐶3𝑥3 + 𝐶4𝑥4
(41)
24
El denominador visto en la ecuación 41, es una expresión donde los coeficientes 𝐶 son constantes que se
presentan en la Tabla 2.
Tabla 2. Valores de las contantes C para el cálculo del factor de escala.
Constante Valor 𝐶0 0.886259184149 𝐶1 0.00852888014766 𝐶2 0.0257748943765 𝐶3 -0.002117760028167 𝐶4 0.000664358428
El otro término es 𝑥 y relaciona el factor de forma 𝑘 con el factor de escala 𝑐 y está dado por la
expresión:
𝑥 = 4 (1 +1
𝑘) − 6
(42)
Este análisis se llevó a cabo tomando datos meteorológicos medidos por un periodo de 5 años por el
área de meteorología de la división de Oceanología del CICESE.
3.2 Estudio de los rotores.
La dinámica de fluidos computacional, proporciona la posibilidad de analizar y resolver
problemas relacionados a corrientes de fluidos, así como cuerpos sumergidos en ellos. En este proyecto,
la simulación del aerogenerador se llevó a cabo utilizando Fluent® y considerando un sistema del tipo
Interacción Fluido-Estructura, que simula la interacción entre objetos móviles, inmóviles o deformables.
Las simulaciones de interacciones fluido-estructura (FSI) abarcan un gran número de aplicaciones tales
como aeroespacial, automovilística y generación de energía entre otras, su importancia radica en la
posibilidad de predecir los esfuerzos a los que se somete un sistema en condiciones críticas de operación
y la posibilidad de asegurar su resistencia bajo esas condiciones. A principios del siglo XIX, se formularon
las ecuaciones de Navier-Stokes, llamadas así por Claude-Louis Navier y George Gabriel Stokes y han sido
aplicadas a la solución de problemas de CFD. Unos de los primeros cálculos fueron los realizados por

25
Lewis Fry Richardson para predecir el clima en Gran Bretaña por medio de la división del territorio en
celdas y nodos, y fue en la década de los 40 cuando se utilizó una maquina ENIAC para realizar los
primeros análisis CFD con métodos parecidos a los de Richardson (Hunt, 1998).
El desarrollo de computadoras con mejores capacidades de procesamiento, hizo posible llevar a cabo
simulaciones más complejas, uno de los primeros trabajos de modelado de flujo de fluido gobernado por
las ecuaciones de Navier-Stokes fue llevado a cabo en el Laboratorio Nacional de Los Álamos en el grupo
T3 liderado por Francis H. Harlow quien es considerado uno de los pioneros en CFD (Harlow, 2004).
3.2.1 Diseño 2D y 3D.
El diseño 2D y 3D fue llevado a cabo en DesignModeller y SolidWorks, los rotores propuestos son
máquinas del tipo arrastre y se caracterizan por tener dos o más cazoletas en forma de semicírculo. Sus
parámetros principales son los siguientes:
Proporción de aspecto.
La proporción de aspecto es la relación entre la altura y el diámetro del rotor.
Está definida por la siguiente ecuación:
𝐴 =ℎ
𝐷
(43)
Donde ℎ es la altura del rotor y 𝐷 el diámetro de la turbina como se muestra en la Figura 7.
Proporción de traslape de cazoletas.
La proporción de traslape de cazoletas representa la razón de la distancia entre las cazoletas sobre el
diámetro del rotor como se observa en la Figura 8, su valor es positivo o negativo y se define por la
siguiente ecuación:
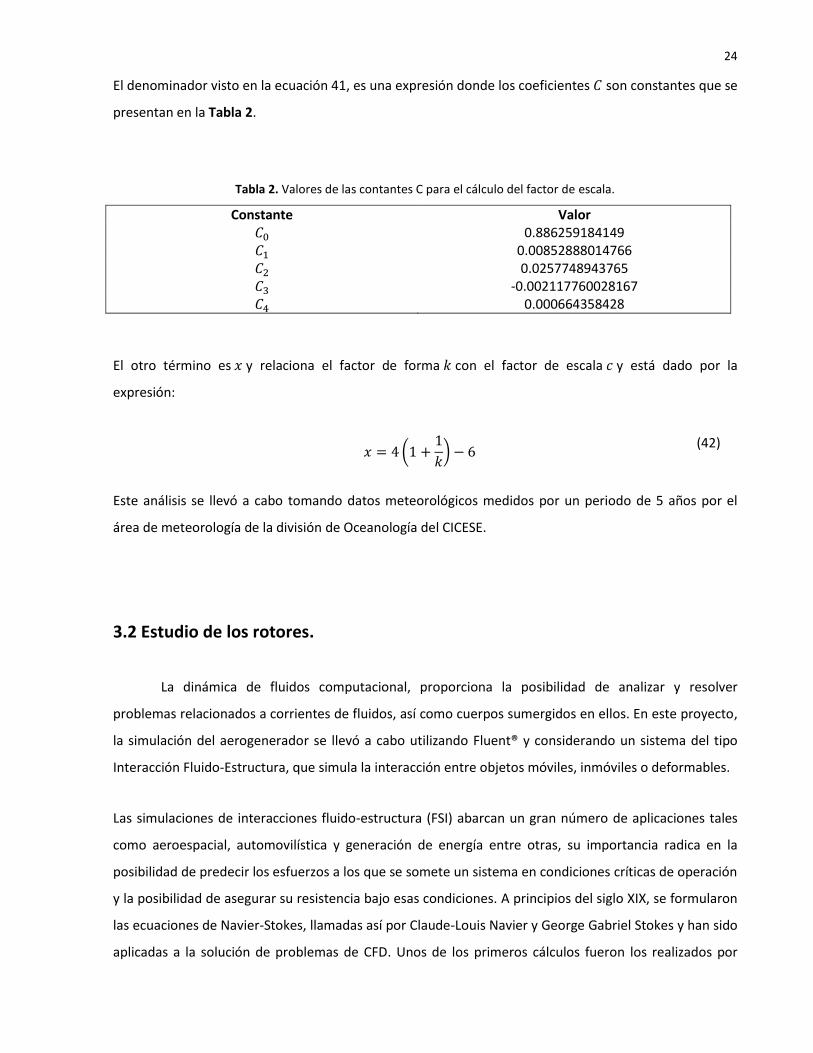
26
𝛽 =𝑎
𝐷 (44)
Donde:
𝛽 es la proporción de traslape de alabes.
𝑎 es la distancia de traslape.
Figura 7. Vista frontal de un rotor tipo Savonius.
Figura 8. Vista transversal de un rotor tipo Savonius con traslape

27
Proporción de separación (𝑮).
La proporción de separación de alabes representa la razón de la distancia vertical entre los alabes
dividido entre el diámetro del rotor y está definida por la siguiente ecuación:
𝐺 =𝑏
𝐷
(45)
Donde 𝐺 es la proporción de separación y 𝑏 es la distancia entre las cazoletas (
Figura 9).
Diámetro de disco (𝒅𝒅𝒊𝒔𝒄).
Una de las modificaciones más comunes y sencillas para aumentar el 𝐶𝑝 de un rotor de eje vertical, es el
uso de discos o platos que se colocan a los extremos del rotor. El principal parámetro que define estos
discos es su diámetro y se representa por 𝑑𝑑𝑖𝑠𝑐 (Jeon et al., 2015).
Angulo de arco de la cazoleta.
Este parámetro se representa por la letra griega 𝜃 como se observa en la Figura 10 y su modificación se
enfoca en mejorar el desempeño aerodinámico del rotor (Modi et al., 1989).
Los rotores propuestos para ser analizados, son los reportados por Savonius, Blackwell y Modi. En la
Tabla 3 se comparan algunos de sus principales parámetros geométricos.

28
Figura 9. Vista transversal de un rotor tipo Savonius con separación.
Figura 10. Ángulo de arco en un rotor Savonius.
Tabla 3. Medidas y proporciones de rotores.
Magnitud Savonius Blackwell Modi Diámetro 72.80 mm 74.70 mm 73.24 mm
Radio Cazoleta 17.45 mm 20.65 mm 18.18 mm Altura 58.24 mm 80.68 mm 56.4 mm
Diámetro disco extremo 80 mm 82.17 mm 97.65 mm
Traslape 0 mm 5.90 mm 0 mm Separación 0 mm 0 mm 7.28 mm
Arco de cazoleta 180o 180o 135o Proporción de Aspecto 0.8 1.1 0.77 Proporción de traslape 0 0.15 0
Proporción de separación 0 0 0.10

29
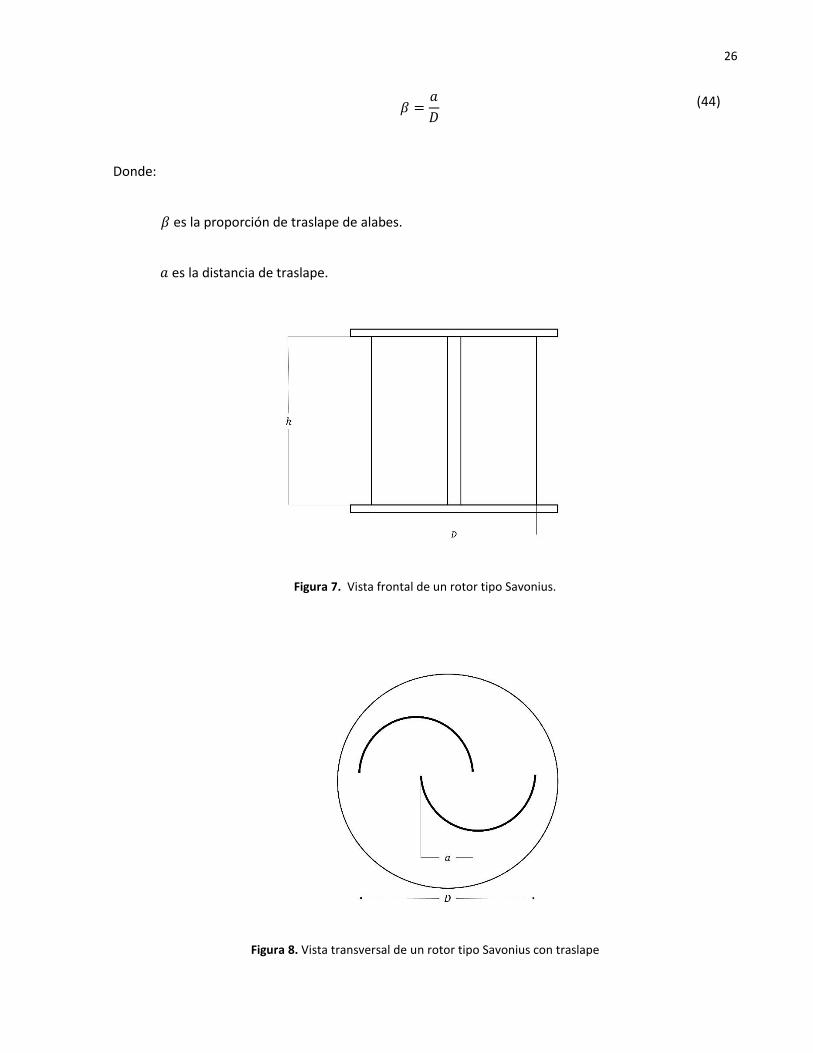
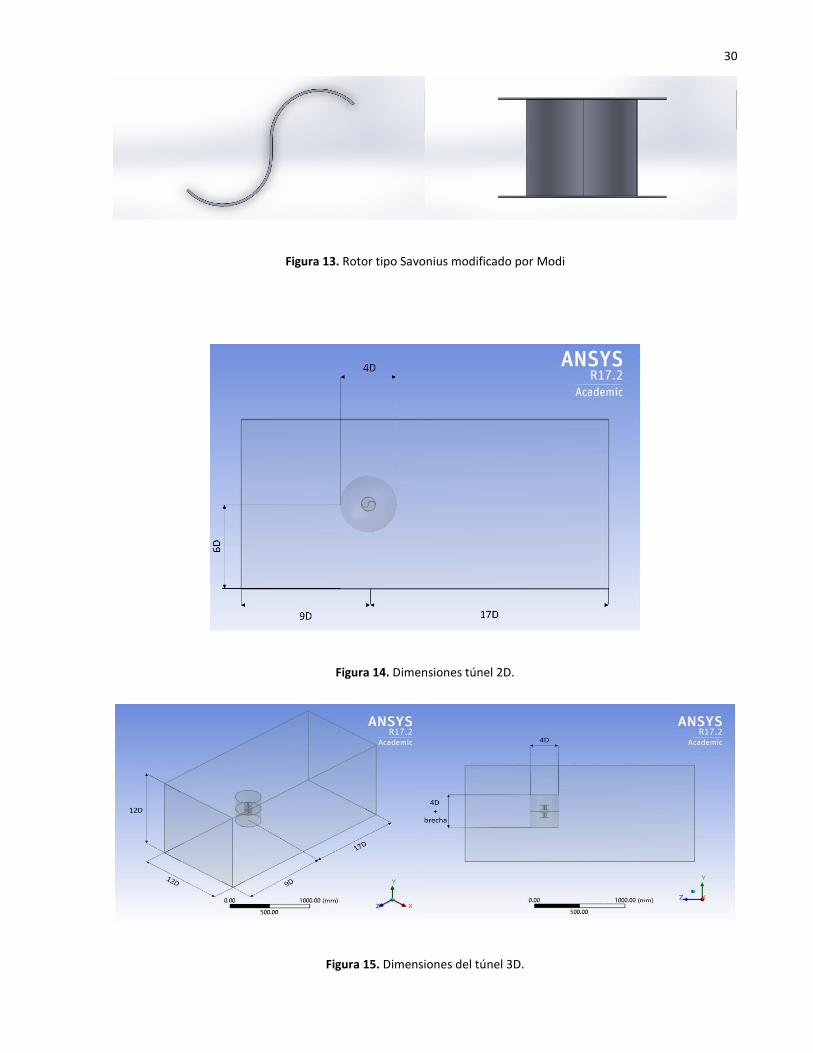
En las Figura 11, Figura 12 y Figura 13 se aprecian las topologías de los rotores a simular así como sus
proporciones de aspecto y tamaño de disco extremo.
Para el diseño del túnel de viento se tomaron las proporciones propuestas por Ferrari et al. (2017), en la
Figura 14 se muestran las proporciones utilizadas para el análisis en 2D y las dimensiones del túnel 3D
para un solo rotor son iguales a las bidimensionales con la excepción de que se extrude 12 veces el
diámetro del rotor en dirección del eje X para crear un prisma rectangular. La interfaz puede ser
cilíndrica o esférica, se consideró esférica para los rotores sencillos y cilíndricas para los rotores dobles y
se muestran en la Figura 15.
Figura 11. A la izquierda el rotor Savonius bidimensional y a la derecha el rotor Savonius tridimensional.
Figura 12. El rotor Savonius modificado por Blackwell. Bidimensional y tridimensional.
30
Figura 13. Rotor tipo Savonius modificado por Modi
Figura 14. Dimensiones túnel 2D.
Figura 15. Dimensiones del túnel 3D.

31
3.2.3 Proceso de mallado.
Una vez que se estableció el modelo físico de los rotores, el siguiente paso consistió en la discretización
del dominio; cuanto mayor sea la cantidad de volúmenes de control mejor será la aproximación de los
resultados obtenidos, sin embargo, un aumento considerable de los volúmenes de control puede
incrementar exponencialmente el tiempo de cómputo. La licencia de Ansys con la que se cuenta tiene un
límite de 512,000 elementos o nodos, un nodo es un punto en el centro de un volumen de control donde
son calculadas las variables del análisis que se está efectuando. La configuración utilizada para la
creación de la malla en los rotores 2D se aprecia en la Tabla 4.
El uso de la función de dimensionamiento uniforme hace que el refinamiento de la malla sea basado en
una medida dada, lo que permite una mayor homogeneidad pero, da paso a que se presenten fallas
debido a la incapacidad de adaptarse a las paredes curvas del rotor (Ansys Inc., 2009).
En la Tabla 5 se muestra la configuración de malla para las simulaciones 3D y rotores singulares, se
utilizaron tetraedros los cuales permiten una mejor adaptación a las paredes de los rotores. Debido a la
complejidad de la simulación de los rotores en contra-rotación, se simplificó la configuración del mallado
en los rotores para que el número de elemento y nodos permanezca dentro de los límites permitidos por
la licencia. La Tabla 6 resume la configuración de las simulaciones con rotores dobles.
Tabla 4. Configuración de malla para los rotores en 2D.
Dimensionamiento
Función de dimensión: Uniforme
Centro de relevancia: Fine Suavizado: High
Tamaño de cara máximo: 0.05 metros Dimensionamiento del rotor
Método: Geometría Savonius Blackwell Modi 6 caras 8 caras 10 caras
Tamaño de elemento 0.001 m Función de dimensionamiento Uniforme
Dimensionamiento de las interfaces interior y exterior Geometría: 1 lado
Tamaño de elemento: 0.01 m Función de dimensionamiento: Uniforme
Refinamiento Geometría: Cara del túnel de viento y rotor
Método Geometría: Cara del túnel de viento y rotor
Método: Triángulos

32
Tabla 5. Configuración del mallado en simulaciones 3D singulares.
Dimensionamiento
Función de dimensión: Uniforme Centro de relevancia: Medium
Suavizado: Medium Tamaño de cara máximo: Default
Dimensionamiento del rotor Metodo: Geometría
Savonius Blackwell Modi 16 caras 18 caras 18 caras Tamaño de elemento 0.005 m
Función de dimensionamiento Uniforme Refinamiento
Geometría Cara del túnel de viento y rotor Método
Geometría Cara del túnel de viento y rotor Método Tetrahedros
Tabla 6. Configuración del mallado para las simulaciones dobles.
Dimensionamiento
Función de dimensión: Uniforme
Comportamiento: Hard Savonius Blackwell Modi
# Nodos 87,233 97,354 # Elementos 456,342 510,232
Refinamiento Cuerpo en Rotación Método: Selección de Geometría
Geometría: 3 cara. 10mm Refinamiento Túnel de Viento
Método: Selección de Geometría Geometría: 6 caras. 50mm
En los casos en 2D se empleó una malla triangular para mejorar el ajuste a las paredes del rotor como se
observa en la Figura 16.

33
Figura 16. Malla de túnel y zonas de interfaz para simulaciones 2D.
Se observa en la Figura 17 que en las orillas de los rotores se refina la malla, lo cual aumenta el número
de nodos en las zonas cercanas a la superficie sólida, esto permite tener mejores aproximaciones de la
capa limite que es la zona donde se presentan los mayores gradientes de presión y velocidad así como
los gradientes de velocidad y presión para el cálculo numérico de la simulación.
En el caso de las simulaciones en 3D, se consideró un mallado simple. En la Figura 18 se aprecia el túnel
de viento cuya forma es un prisma rectangular con polígonos y la interfaz es una esfera que encierra al

34
rotor. El uso de la esfera en el caso de rotores singulares, permite obtener una mejor calidad de malla y
se evitan problemas de divergencia.
La Figura 19 muestra el mallado de los rotores 3D, es importante señalar que se utilizó la misma
configuración en todos los casos porque en apariencia el rotor tipo Modi despliega un mallado más
concentrado comparado con el resto y se debe a la diferencia de alturas entre los rotores.
Figura 17. Acercamiento a las mallas 2D de los rotores Savonius, Blackwell y Modi.
Figura 18. Mallado 3D del túnel de viento y esfera de interfaz donde el rotor se encuentra encerrado.

35
Figura 19. Mallado en los rotores singulares.
En las simulaciones dobles, cada uno de los rotores se encuentra encerrado en un cilindro de interfaz
que gira en sentido contrario con respecto al otro, esto hace que se tengan 4 caras de contacto con el
túnel de viento y 2 entre los rotores, el cambio de forma de la interfaz de debe a la zona de
espaciamiento entre los dos rotores donde el viento pasa. Las mallas del túnel de viento y de interfaces
se muestran en la Figura 20 y las mallas de los rotores en la Figura 21.
Los nombres de las fronteras se muestran en la Figura 22, las paredes del rotor se llaman rotor_body,
inlet es la entrada de fluido y outlet la salida, interface es la zona de entrada y salida del fluido a la zona
de rotación, walls son las paredes del túnel de viento y rotating_body es el rotor.
Figura 20. Malla de túnel de viento e interfaces de los rotores dobles.

36
Figura 21. Mallas de los rotores en contra-rotación.
Figura 22. Localización de las fronteras en los casos 2D y 3D.

37
3.2.4 Configuración de Fluent.
Una vez finalizado el proceso de mallado, se procedió a configurar el solucionador de Fluent. Para
modelar el flujo inestable alrededor de la turbina, existen dos técnicas que se explican a continuación:
Marco de referencia móvil (MRF).
Esta técnica simula el movimiento del fluido sin mover el rotor e interfaz y añade aceleraciones
locales a cada matriz de celdas para simular el movimiento, sin embargo, en algunas ocasiones,
esta técnica es una sobresimplificación del problema y lleva a soluciones no precisas.
Malla deslizante.
Es un cálculo transitorio en el que se mueven zonas en cada paso de tiempo. Cuando se busca
una solución precisa, la técnica de malla deslizante es la indicada para simular un campo de flujo
inestable, aunque también es la que demanda mayor poder de procesamiento. En esta técnica
se utilizan dos o más zonas de celdas y cada una está unida por al menos una ‘zona de interfaz’
donde se encuentra con la zona de celdas contraria. Las zonas de interfaz y las zonas de celda
adyacentes están asociadas para formar una interfaz de malla y las dos zonas de celda se
mueven de forma relativa una con respecto a la otra a lo largo de la interfaz de malla, por lo
tanto la técnica que se utilizará en este trabajo de tesis es la de malla deslizante
3.2.4.1 Modelos de turbulencia.
La turbulencia es un fenómeno caótico y se caracteriza por la presencia de remolinos, lo cual hace de
éste un fenómeno complejo y difícil de representar matemáticamente. Sin embargo, ante la presencia
de la turbulencia en múltiples aplicaciones surge la necesidad de representar computacionalmente éste
fenómeno, para ello una de las opciones más utilizadas son los modelos promediados de Reynolds de las
ecuaciones de Navier–Stokes (RANS, por sus siglas en inglés). Los modelos RANS se basan en la
promediación de las ecuaciones del fluido, para lo cual todas las magnitudes se sustituyen por la suma
de su valor medio y una componente fluctuante. Donde la promediación de las ecuaciones genera
términos adicionales que causan un problema de cerradura, por lo tanto, es necesario generar otras
ecuaciones para cerrar el sistema; dando como resultado modelos de turbulencia de cero, una y dos
ecuaciones, siendo éstos últimos los más empleados dentro de los modelos RANS. Existen diversos
modelos de dos ecuaciones, pero los más conocidos son los de las familias 𝜅 − 𝜀 y 𝜅 − 𝜔 (Wilcox, 1998) .

38
En este trabajo se utilizaron los modelos 𝜅 − 𝜔 𝑆𝑆𝑇 y 𝐷𝐸𝑆 𝜅 − 𝜔 𝑆𝑆𝑇, de los cuales el modelo 𝐷𝐸𝑆 𝜅 −
𝜔 𝑆𝑆𝑇 es el más preciso pero requiere demasiados recursos computacionales, mientras el modelo 𝜅 −
𝜔 𝑆𝑆𝑇 se recomienda para casos donde los equipos de cómputo utilizados no son tan avanzados
(Dobrev & Massouh, 2011). Estos son modelos de dos ecuaciones que presentan una variable para cada
ecuación adicional, en este caso las variables son la energía cinética turbulenta (𝜅) y la tasa de disipación
especifica (𝜔).
𝐷𝜌𝜅
𝐷𝑡= 𝜏𝑖𝑗
𝜕𝑢𝑖
𝜕𝑥𝑗 -𝑐𝜇𝜌𝜔𝜅 +
𝜕
𝜕𝑥𝑗[(𝜇 + 𝜎𝑘𝜇𝑡)
𝜕𝜅
𝜕𝑥𝑗]
(46)
𝐷𝜌𝜔
𝐷𝑡= 𝜏𝑖𝑗
𝜕𝑢𝑖
𝜕𝑥𝑗-β𝜌𝜔2 +
𝜕
𝜕𝑥𝑗[(𝜇 + 𝜎𝜔𝜇𝑡)
𝜕𝜔
𝜕𝑥𝑗] + 2(1 − 𝐹1)𝜌𝜎𝜔2
1
𝜔
𝜕𝑘
𝜕𝑥𝑗
𝜕𝜔
𝜕𝑥𝑗
Donde las constantes y funciones de pared del modelo están reportadas por Menter (1994).La condición
de frontera de 𝜅 en la entrada está definida por la expresión:
𝜅𝑖𝑛 = 3
2(𝑈𝑖𝑛𝑓𝐼)
2
(47)
Y la de 𝜔 por la ecuación:
𝜔𝑖𝑛 = 𝐶𝜇
34
𝑘12
𝑙
(48)
Donde 𝐼 es la intensidad de turbulencia y es igual a 1.4%, 𝐶𝜇 a 0.09 y 𝑙 a 0.07 veces al diámetro hidráulico
del túnel de viento (Ferrari et al., 2017).

39
3.2.4.2 Materiales
Los materiales seleccionados para el análisis fueron aluminio para el rotor y el fluido de trabajo es aire.
El aluminio tiene una densidad de 2719 kg/m3 y el aire una densidad de 1.225 kg/m3 y una viscosidad de
1.7894e-05 kg/m-s.
3.2.4.3 Condiciones de zona de celdas.
En las simulaciones en 2D y 3D de un solo rotor se tienen dos zonas de celda, mientras que en las
simulaciones de rotores dobles se tienen 3. En las zonas de celda se definen los parámetros que rigen el
comportamiento de las áreas desde el material que circula en ellas hasta la forma y velocidad que se
moverán.
rotating_body (superior o inferior): es la zona donde se encuentra la turbina y es la que rota para
simular el funcionamiento del rotor. Se definen los parámetros del fluido, el tipo de movimiento
(MRF o malla deslizante), el origen de su eje, la dirección del eje de rotación y la velocidad de
rotación en radianes por segundo.
Tunnel: está definido como la región donde se encuentra la zona en rotación y en donde entra y
sale el flujo de aire. Aquí se especifica si el fluido es aire o agua lo cual depende del tipo de
simulación a realizar.
3.2.4.4 Condiciones de frontera
Las condiciones de frontera se dan a las paredes nombradas anteriormente:
Inlet: Es la entrada de fluido a una velocidad y turbulencia dada. El método de especificación de
velocidad es por medio de la magnitud de velocidad y es normal a la frontera mientras que su
marco de referencia es absoluto, la presión manométrica es de 0 debido a que se simula a
presión atmosférica y la velocidad del viento es 7.2 m/s. Las condiciones de frontera para las

40
variables 𝜅 y ω calculan de acuerdo de las ecuaciones 46 y 47, las cuales dependen de la
velocidad de entrada las dimensiones del túnel de viento.
Outlet: Es la salida del flujo de fluido, el marco de referencia es absoluto con una presión
manométrica de 0 Pascales y con un método de especificación de dirección normal a la frontera.
Para 𝜅 y 𝜔 se establecieron gradientes igual a cero en esa dirección.
Walls: Son las paredes del túnel de viento y están definidas como aluminio con condición no
deslizante y rugosidad contante de 0.5.
Rotating_body: representa al rotor y su área a simular, las condiciones que se le deben de dar
son de pared, movimiento relativo a la zona adyacente y que sea rotacional. En caso de los
rotores singulares su origen se encuentra en (0,0,0) y el eje de rotación se representa con el
vector [0,0,1] para los casos en 2D y [0,1,0] para los casos en 3D; las paredes tienen condición de
no deslizamiento y una contante de rugosidad de 0.5.
3.2.4.5 Valores de referencia.
Fluent usa valores de referencia para calcular 𝐶𝐿, 𝐶𝐷 y 𝐶𝑚. Algunos de estos valores están relacionados al
fluido de trabajo, mientras que otros a la geometría del rotor.
Tabla 7. Valores de referencia para las simulaciones 2D y 3D.
Parámetro Valor simulación 2D Simulación 3D
Densidad (kg
m^3 ) 1.229 1.229
Viscosidad (kg
m*s) 1.7894x10-05 1.7894x10-05
Área m2 Diámetro de la turbina (𝑚) Diámetro de la turbina * Altura (m2) Longitud m Radio de la turbina (𝑚) Radio de la turbina (m)
3.2.4.6 Parámetros de solución
Para llevar a cabo la simulación, se eligió el algoritmo de acople presión-velocidad, así como los
parámetros de discretización espacial. En la Tabla 8 se muestra la configuración para la simulación con
método de malla deslizante.

41
De acuerdo a la literatura, el algoritmo PISO para el acople de presión-velocidad, es la opción más
recomendable para simulaciones en estado transitorio, ya que mejora el tiempo de convergencia. Para el
cálculo del gradiente en mallas no estructuradas se recomienda el uso de Least Squares Cell Based,
mientras que para la interpolación de la presión se seleccionó el esquema PRESTO! Por último, para la
discretización espacial de las ecuaciones de momento, 𝜅 y 𝜔 se seleccionó una interpolación de segundo
orden mejorar precisión para el coeficiente de momento.
Tabla 8. Métodos de solución escogidos para las simulaciones.
Métodos de solución. Acercamiento malla deslizante Algoritmo de acople Presión-Velocidad PISO
Discretización de gradiente Least Square Cell Based Discretización de presión PRESTO!
Discretización de momento Upwind de segundo orden Discretización de energía cinética turbulenta Upwind de primer orden
Discretización de razón de disipación especifica Upwind de primer orden Discretización espacial del término transitorio Upwind de primer orden
Corridas de simulación.
Para predecir el comportamiento de los rotores de manera más precisa, es necesario definir qué tipo de
análisis se va a realizar, a estos estudios se les conoce como estudio de independencia y para su
selección se debe considerar diferentes características como, margen de error, tiempo de cómputo y
errores o problemas que puedan ocurrir durante la simulación. En el presente trabajo se realizaron
estudios de dependencia para: paso de tiempo, modelo te turbulencia, resolución de malla y desfase de
rotores, sus características se presentan en la Tabla 9.
Tabla 9. Estudios de dependencia y parámetros analizados.
Estudio de dependencia Comparación
Paso de tiempo. 1o, 2.5o y 5o por paso de tiempo
Modelo de turbulencia. k-ω SST y DES k-ω SST.
Resolución de malla. Triangular y cuadrada.
Desfase de rotores. Desfase entre rotores dobles de 0o, 45o, 90o y 135o.

42
3.2.4.7 Calculo del paso de tiempo.
Como ya se mencionó anteriormente, el análisis llevado a cabo es de estado transitorio, lo cual requiere
un paso de tiempo o una variación de ángulo para calcular las diferentes variables cada cierto número de
radianes o segundos. Aunque el paso de tiempo puede ser escogido por medio de un valor numérico
específico, es más útil trabajar con pasos de tiempo relacionados con la velocidad radial dada las
condiciones de zona de celdas, por lo tanto estará relacionado con la velocidad angular Ω de la turbina,
la cual está definida por:
Ω =∆𝜃
∆𝑡
(49)
Por lo que la expresión que dará el paso de tiempo asociado con la velocidad de rotación está dada por
la siguiente expresión:
∆𝑡 =𝑔𝑟𝑎𝑑𝑜𝑠
Ω (180
𝜋)
(50)
43
Capítulo 4. Resultados y Discusión
4.1 Análisis de disponibilidad de viento.
Después de la organización de los datos de velocidad y dirección del viento, se obtuvo la distribución de
Weibull y rosa de los vientos se aprecian en las Figura 23 y 24.
Como se observa en la Figura 23¡Error! No se encuentra el origen de la referencia., la curva se
encuentra sesgada a la izquierda lo cual significa que la probabilidad de que se presenten velocidades de
viento entre 0.5 y 1.5 m/s es mayor. El valor de velocidad más frecuente es 0.8 m/s y la velocidad media
para Ensenada es de 1.3 m/s, la probabilidad acumulada de velocidades mayores a 1.3 m/s es del 66% y
la probabilidad de que no haya viento es muy cercana a cero.
En la Figura 24 se observa que las direcciones de viento dominantes provienen del oeste y se deben al
fenómeno de brisa marina que se presenta en zonas costeras, este fenómeno es ocasionado porque
durante el día, la costa tiende a calentarse de forma más rápida que el mar, generando una diferencia de
presión y provocando viento. Se observa también que existen vientos provenientes del este y noreste los
cuales son ocasionados por el fenómeno de terrazón que se produce por la liberación de calor del mar y
el enfriamiento acelerado de la costa.
Se concluye que existe disponibilidad de recurso eólico a bajas velocidades lo que hace atractivo la
instalación de aerogeneradores diseñados específicamente para aprovechar este recurso.

44
Figura 23. Ajuste de curva de Weibull con k=1.837.
Figura 24. Rosa de los vientos para Ensenada, Baja California.
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0 1 2 3 4 5 6
Pro
bab
ilid
ad
Velocidad del viento (m/s)
Probabilidad de Weibull Frecuencia
0
0.05
0.1
0.15
0.2N
NNE
NE
ENE
E
ESE
SE
SSE
S
SSW
SW
WSW
W
WNW
NW
NNW
Probabilidad
45
4.2 Verificación
El rotor Blackwell, con una proporción de traslape de 0.15 y una proporción de aspecto de 1.08, es el
más estudiado en la literatura, por lo que se realizó una comparación correspondiente a 1°, 2.5° y 5° por
paso de tiempo y se compararon los resultados con los obtenidos por Blackwell et al. (1978). En la Tabla
10 se comparan los coeficientes de potencia obtenidos a distintos grados por paso de tiempo y el
resultado obtenido por los experimentos en túnel de viento de Blackwell et al. (1978). Los resultados
sugieren el uso de 1° por paso de tiempo para obtener resultados más precisos, pero si es necesario
reducir el tiempo de cálculo debido a la falta de potencia computacional se puede hacer uso de 2.5° por
paso de tiempo. Es importante señalar que cuando se incrementa el paso de tiempo, se reduce el
número de iteraciones necesarias para alcanzar la estabilidad, pero al mismo tiempo aumenta el error
porcentual.
Tabla 10. Resultados de las simulaciones a distintos grados por paso de tiempo.
Coeficiente Blackwell et al. (1978)
1o/paso 2.5o/paso 5o/paso
CP 0.24 0.217 0.202 0.176 Error % — 9.58% 15.83% 26.66%
Para analizar cómo afecta el número de volúmenes de control, su forma y el modelo de turbulencia, se
construyeron cuatro mallas distintas, dos bidimensionales y dos tridimensionales, como se aprecia en las
Figura 26 además, se probaron los modelos k-ω SST y DES k-ω SST y los resultados obtenidos se
compararon con los reportados por Dobrev & Massouh (2011) lo cual es mostrado en las Tabla 11 y
Tabla 12 donde se presentan los valores de CP obtenidos. En las simulaciones bidimensionales se obtuvo
un error relativo porcentual de 14.88% utilizando una malla cuadrada y un 19.34% una malla triangular
respecto a los datos obtenidos por Dobrev & Massouh.
En la Tabla 12 se observa que el coeficiente de potencia obtenido de las simulaciones 3D más
aproximado al experimento de Dobrev & Massouh se obtiene cuando se utiliza la malla cuadrada, el
modelo DES κ-ω SST y 1° por paso de tiempo. Los resultados permiten saber el margen de error si se
necesita disminuir el uso de recursos computacionales, debe mencionarse que las simulaciones con el
modelo 𝜅 − 𝜔 𝑆𝑆𝑇 de malla triangular tuvieron una duración de 36 horas mientras que la duración de
las simulaciones con el modelo 𝐷𝐸𝑆 𝜅 − 𝜔 𝑆𝑆𝑇, malla cuadrada y 1° por paso de tiempo fue de 4 días.

46
Se concluyó que el modelo de turbulencia 𝐷𝐸𝑆 𝜅 − 𝜔 𝑆𝑆𝑇 con una malla cuadrada obtiene los mejores
resultados, mientras que para llevar a cabo una simulación con bajos recursos computacionales, se
puede utilizar una malla triangular o tetraedros con el modelo de turbulencia 𝜅 − 𝜔 𝑆𝑆𝑇 .
Adicionalmente, conforme se incrementa el número de nodos, se disminuye el error porcentual.
Figura 25. Comparación de mallas 2D.
Figura 26. Malla triangular y malla cuadrada de mayor resolución.
Tabla 11. Comparación de los diferentes mallados con los resultados de Dobrev & Massouh.
Dobrev & Massouh
(2011)
Experimento
κ-ω SST
Triangular
2.5°/p.t
κ-ω SST
Cuadrada
2.5°/p.t
CP 0.180 0.214825192 0.20678617
Error % — 19.34% 14.88%

47
Tabla 12. Comparación de modelos de turbulencia y tipo de malla con resultados de Dobrev & Massouh (2011).
Dobrev & Massouh
(2011) Experimento
DES k-ω SST M. cuadrada
1o/p.t.
DES k-ω SST M. cuadrada
2.5°/p.t.
DES k-ω SST M. triangular
2.5°/p.t
k-ω SST M. triangular
2.5°/p.t.
𝑪𝑷 0.180 0.169
0.158624
0.1458 0.1270
Error % — 6.11% 11.87% 19% 29.44%
4.3 Análisis de la curva de potencia
4.3.1 Análisis bidimensional
La curva de potencia se refiere a los valores positivos de CP entre dos valores de TSR, la obtención de
este intervalo permite identificar las velocidades de rotación a las que el rotor aprovechará la energía del
viento y su máximo CP. Para llevar a cabo las simulaciones para los rotores tipo Savonius, Blackwell y
Modi, se utilizó una malla cuadrada con una velocidad de entrada de 7.2 m/s, modelo de turbulencia
DES k-ω SST y 2.5° por paso de tiempo.
Es importante mencionar que el signo negativo en los valores del coeficiente de sustentación indica el
sentido en el que es aplicada la fuerza de sustentación, por lo que se pensaría que entre menor sea el
valor es mejor, pero esto cambia dependiendo del eje y/o sentido de rotación.
En la Figura 27 inciso a se observa la relación entre la fuerza de arrastre y la fuerza de sustentación como
función del TSR, en el inciso b se aprecia el coeficiente de momento como función del TSR. A bajos
valores de TSR la fuerza de sustentación no es considerable mientras que a muy altos valores de TSR la
fuerza de sustentación detiene al rotor cuando gira rápidamente. Debido a que el rotor Savonius es de
tipo arrastre, a altos valores de CL/CD se genera una fuerza de sustentación en la cazoleta retornante en
sentido contrario a la rotación que afecta al momento y eficiencia de los rotores. En la Figura 27c se
aprecia como el coeficiente de potencia como función del TSR sigue la misma tendencia que la Figura
27b.

48
En la Figura 27a se aprecia como la relación CL/CD en el caso del rotor Blackwell se mantiene por debajo
o ligeramente por encima de -1 después de los 0.8 TSR; esto fenómeno tiene efecto sobre el coeficiente
de momento, lo cual se observa en la Figura 27b donde se aprecia que conserva un mayor momento a
TSR’s mayores a 0.8. Esto se refleja en un CP superior a los otros dos rotores como se muestra en la
Figura 27c en donde el área bajo la curva es mayor para este tipo de rotor.
Se observa en la Figura 27a que el rotor Modi presenta una mejor relación CL/CD que el rotor Savonius,
esto se debe a que en la cazoleta retornante del rotor Modi se genera una fuerza de sustentación en la
dirección positiva del eje “Y” haciendo que su signo cambie y afecte el valor de la relación CL/CD.
Mientras que en el rotor Savonius ocurre lo contrario, se genera una fuerza de sustentación negativa
tanto en la cazoleta retornante como en la de ida, siendo mayor en la cazoleta de marcha que en la
cazoleta retornante.
En las Figuras 27b y 27c se observa que después de 1.8 TSR los valores de CM y CP del rotor Modi son
menores que los del rotor Savonius y Blackwell, lo que significa que el rotor Modi tiene un mal
desempeño a altas revoluciones por minuto y velocidades de viento altas. Debido a que se busca diseñar
un aerogenerador que funcione a bajas velocidades de viento y sea sencillo de construir, se descartó al
rotor Modi de las simulaciones subsecuentes.
a)
-2
-1.75
-1.5
-1.25
-1
-0.75
-0.5
-0.25
0
0.4 0.6 0.8 1 1.2 1.4 1.6
CL /C
D
TSR
Savonius Blackwell Modi

49
b)
c)
Figura 27. a) Relación entre el coeficiente de sustentación. b) Coeficiente de momento promedio de cada rotor. c) Curva de coeficiente de potencia de cada rotor.
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.4 0.6 0.8 1 1.2 1.4 1.6
CM
TSR
Blackwell Modi Savonius
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.4 0.6 0.8 1 1.2 1.4 1.6
CP
TSR
Blackwell Modi Savonius

50
4.3.2 Análisis tridimensional
El análisis tridimensional permite analizar el efecto que tiene la proporción de aspecto y el uso de los
discos a los extremos de los rotores, estas características no pueden ser simuladas de manera
bidimensional y por esta razón se llevan a cabo simulaciones en 3D.
En la Figura 28 se aprecia el coeficiente de arrastre de los rotores Savonius y Blackwell como función del
TSR, se observa que el rotor Blackwell presenta un coeficiente de arrastre menor a pesar de tener una
razón de proporción mayor al rotor Savonius, esto se debe al traslape entre las cazoletas porque permite
que el viento pase entre las cazoletas y empuje la cazoleta retornante. En la Figura 29 se observa el
coeficiente de sustentación como función del TSR y se aprecia como el traslape del rotor Blackwell
mejora el coeficiente de sustentación.
En la Figura 30 inciso a se observa la relación entre la fuerza de arrastre y la fuerza de sustentación como
función del TSR, en el inciso b se aprecia el coeficiente de momento como función del TSR y en el inciso c
se aprecia el coeficiente de potencia como función del TSR, lo cual permite un mejor análisis del
coeficiente de sustentación y arrastre.
Comparando los diferentes incisos de la Figura 30 se observa que a bajos números de TSR el rotor
Savonius tiene una relación mayor de CL/CD que el rotor Blackwell lo que se traduce a un mayor valor de
CM y CP que el rotor Blackwell. Entre 0.4 y 0.9 TSR la relación de CL/CD del rotor Blackwell aumenta
incluidos el CM y el CP por encima del rotor Savonius. Pero a valores mayores a 0.9 TSR el rotor Blackwell
disminuye sus coeficientes de momento y potencia por debajo del rotor Savonius, el aumento del valor
de CL/CD se debe a que una de las cazoletas sufre de una fuerza de sustentación contraria al sentido de
giro, frenando el rotor y haciéndolo menos eficiente.
En la Figura 30b se aprecia que el rotor Blackwell presenta mejor coeficiente de momento a bajas
velocidades de rotación, por lo que tiene una mejor capacidad de empezar a girar por sí solo y hacer
girar generadores de mayor potencia que un rotor Savonius, pero para altos valores de TSR se aprecia
que el momento disminuye de manera significativa debido a la proporción de aspecto y la rápida
rotación que incrementan la resistencia al viento; el valor positivo del coeficiente de sustentación se
debe a que la fuerza está siendo aplicada en dirección positiva del eje Z.

51
En la Figura 30c se observa el comportamiento del coeficiente de potencia en función del TSR, se
aprecia que para un intervalo de TSR de 0.4 a 0.9 el rotor Blackwell es más eficiente que el rotor
Savonius; lo cual es mejor si se usa en zonas donde las velocidades de viento son constantes. Por otro
lado, si se necesita de un rotor que sea más eficiente a mayor número de revoluciones por minuto y en
zonas con velocidades de viento fluctuantes, entonces el rotor Savonius tendrá un mejor desempeño
que el Blackwell debido a su mayor generación promedio.
Figura 28. Coeficiente de arrastre de rotores 3D.
Figura 29. Coeficiente de sustentación de rotores 3D.
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
0.2 0.4 0.6 0.8 1 1.2
CD
TSR
Savonius Blackwell
0
0.2
0.4
0.6
0.8
1
1.2
0.2 0.4 0.6 0.8 1 1.2
CL
TSR
Savonius Blackwell

52
a)
b)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.2 0.4 0.6 0.8 1 1.2
CL
/ C
D
TSR
Savonius Blackwell
0
0.05
0.1
0.15
0.2
0.25
0.3
0.2 0.4 0.6 0.8 1 1.2
CM
TSR
Savonius Blackwell

53
Figura 30. a) Relación entre coeficiente de sustentación y arrastre. b) Coeficiente de momento de rotores 3D. c) Coeficiente de potencia de rotores 3D.
4.4 Rotores dobles.
En las secciones anteriores se observó que un rotor Savonius presenta un mejor desempeño para
condiciones donde la velocidad del viento no es constante y el rotor Blackwell para condiciones cuando
el viento se mantiene en una velocidad específica; por lo tanto, con el objetivo de disminuir la velocidad
de arranque y mejorar el porcentaje de aprovechamiento del viento, se presenta la adición de un
segundo rotor que gira en sentido contrario.
4.4.1 Estudio de independencia de desfase en rotores dobles.
Debido a que el desfase entre rotores permite observar el efecto que tiene la diferencia del ángulo de
ataque inicial sobre los coeficientes de arrastre, sustentación y momento, en esta sección se presenta el
estudio de la independencia del desfase entre rotores. En la Figura 31 se muestran los coeficientes de
arrastre para el rotor superior, inferior y total, así como de los diferentes casos de estudio con desfases
de 0°, 45°, 90° y 135° como función del tiempo de simulación; en ella se aprecia cómo se desfasan las
0
0.05
0.1
0.15
0.2
0.2 0.4 0.6 0.8 1 1.2
CP
TSR
Savonius Blackwell

54
series de valores de los rotores inferior y superior para 45°, 90° y 135° de desfase entre rotores. Además,
el coeficiente de arrastre total de un aerogenerador con dos rotores en contrarrotación es una suma de
los coeficientes de arrastre de los rotores individuales.
En la Figura 32 se aprecia el coeficiente de arrastre total de cada caso de estudio como función del
tiempo de simulación y se comparan entre sí. Como se transfiere el desfase físico a la serie de valores
resultante, ésta es amplificada o atenuada dependiendo del desfase y el valor promedio es igual en
todos los casos de estudio; esto demuestra la existencia de un fuerza paralela a la dirección del viento
que sería aplicada al eje del aerogenerador y generaría un momento mayor en el rotor superior que en
el rotor inferior. El momento máximo se presenta cuando se tiene un desfase de 0 grados, y lo que
produciría fatiga mecánica y aumentaría el riesgo de una falla en el soporte principal de los rotores, por
lo que se deberán de instalar en una estructura rígida y fuerte.
Figura 31. El coeficiente de arrastre para rotores dobles en desfase.

55
Figura 32. Coeficientes de arrastre para rotores dobles en desfase.
La Figura 33 muestra el comportamiento del coeficiente de sustentación en el rotor superior, inferior y
el resultante a diferentes desfases; la serie de valores resultantes fue producto de la resta de las series
de valores de coeficiente de sustentación de los rotores superior e inferior, debido a que las fuerzas de
sustentación de los rotores son contrarias, resultando en una serie de valores atenuada en los casos de
desfase donde el coeficiente de arrastre se vio aumentado. Se aprecia que a los 90o grados de desfase el
coeficiente de sustentación alcanza los máximos valores del rotor superior y los mínimos del rotor
inferior y a 0° el valor del coeficiente de sustentación es 0.
En la Figura 34 se presenta el coeficiente de sustentación resultante como función del tiempo de
simulación para cada desfase y se aprecia que el valor promedio es igual a 0 en todos los casos, además
de la existencia de un desfase en la serie de valores, el cual está relacionado con el desfase físico. Al igual
que la fuerza de arrastre, las gráficas muestran como el eje de soporte del aerogenerador se verá
expuesto a un momento perpendicular. Las fuerzas de arrastre y sustentación ocasionan la rotación del
rotor pero además un movimiento oscilatorio que producirá fatiga en el eje, por lo que se necesitan de
materiales fuertes y un diseño resistente a las fuerzas de arrastre y sustentación.
1
1.5
2
2.5
3
3.5
4
4.5
0.264 0.269 0.274 0.279 0.284 0.289 0.294 0.299 0.304
CD
Tiempo (s)
0 grados 45 grados 90 grados 135 grados

56
Figura 33. El coeficiente de sustentación para rotores dobles en desfase.
Figura 34. Coeficientes de sustentación totales resultantes de los diversos desfases.
-4
-3
-2
-1
0
1
2
3
4
0.26 0.265 0.27 0.275 0.28 0.285 0.29 0.295 0.3
CL
Tiempo (s)
0 grados 45 grados 90 grados 135 grados

57
En la Figura 35 se aprecia el coeficiente de momento para cada desfase y se observa un resultado similar
al coeficiente de sustentación, debido a que tienen símbolos contrarios ocasionados por el sentido de
rotación lo cual provoca que el valor resultante sea cero. El análisis del coeficiente de momento en el
desfase entre los rotores en contrarrotación está relacionado con la velocidad de arranque del
aerogenerador, la cual se reduce con la introducción del segundo rotor.
En la Figura 36 se aprecia la comparación entre los coeficientes de momento y la existencia de un
desfase de las series de valores, relacionado con el desfase físico y parecido a los mostrados por el
coeficiente de arrastre y sustentación. Para la obtención del coeficiente de momento y potencia total, se
deberá cambiar el signo de los valores de los coeficientes del rotor superior, esto para poder evaluar el
momento total que ejercen los rotores sobre los generadores y la eficiencia máxima aparente del
aerogenerador. Al ser contrarios los momentos el aerogenerador girará y generará energía a velocidades
menores que aerogeneradores de eje horizontal.
Figura 35. El coeficiente de momento para rotores dobles en desfase.
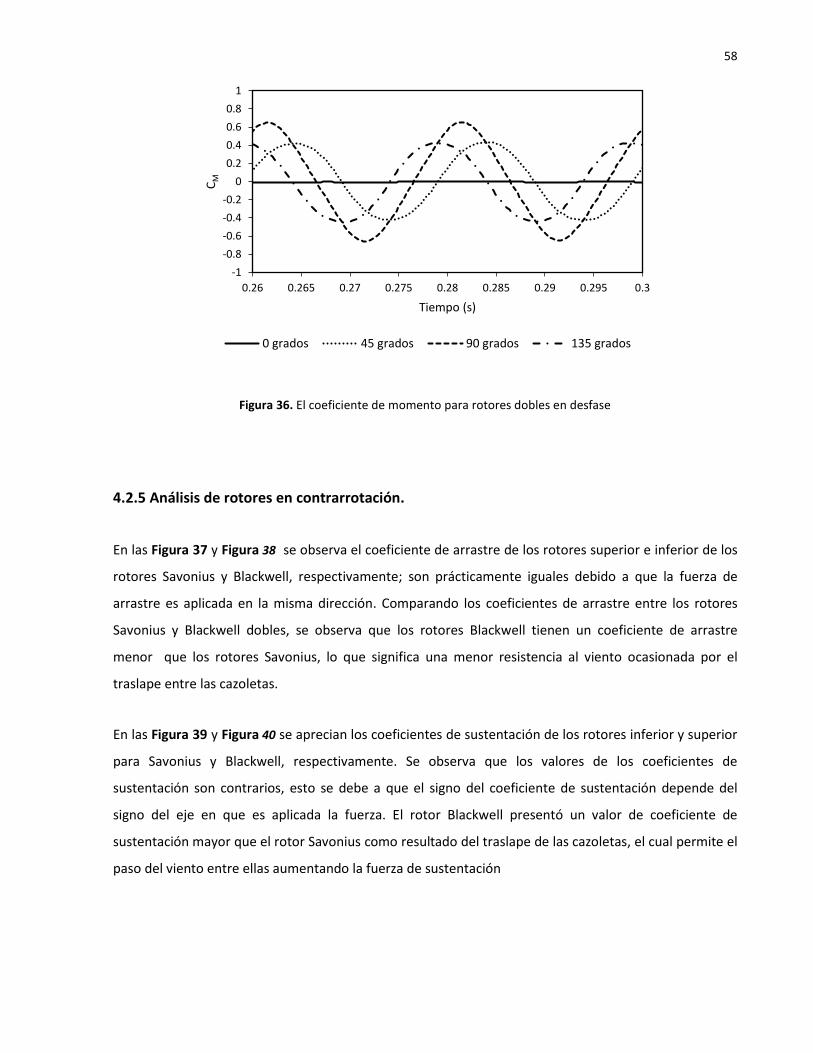
58
Figura 36. El coeficiente de momento para rotores dobles en desfase
4.2.5 Análisis de rotores en contrarrotación.
En las Figura 37 y Figura 38 se observa el coeficiente de arrastre de los rotores superior e inferior de los
rotores Savonius y Blackwell, respectivamente; son prácticamente iguales debido a que la fuerza de
arrastre es aplicada en la misma dirección. Comparando los coeficientes de arrastre entre los rotores
Savonius y Blackwell dobles, se observa que los rotores Blackwell tienen un coeficiente de arrastre
menor que los rotores Savonius, lo que significa una menor resistencia al viento ocasionada por el
traslape entre las cazoletas.
En las Figura 39 y Figura 40 se aprecian los coeficientes de sustentación de los rotores inferior y superior
para Savonius y Blackwell, respectivamente. Se observa que los valores de los coeficientes de
sustentación son contrarios, esto se debe a que el signo del coeficiente de sustentación depende del
signo del eje en que es aplicada la fuerza. El rotor Blackwell presentó un valor de coeficiente de
sustentación mayor que el rotor Savonius como resultado del traslape de las cazoletas, el cual permite el
paso del viento entre ellas aumentando la fuerza de sustentación
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.26 0.265 0.27 0.275 0.28 0.285 0.29 0.295 0.3
CM
Tiempo (s)
0 grados 45 grados 90 grados 135 grados
59
Las Figura 41 y Figura 42 muestran el coeficiente de momento para el rotor Savonius y Blackwell doble
en contra rotación, respectivamente. Se observa que el coeficiente de momento del rotor Savonius
doble se comporta de una manera más estable que el rotor Blackwell. El máximo valor de ambos rotores
se encuentra a 0.8 TSR y después disminuye de manera menos pronunciada en el rotor Savonius que en
el rotor Blackwell. Esto significa que el rotor Savonius doble mantiene un par casi constante
independientemente de la velocidad de giro, mientras que el rotor Blackwell tiene variaciones muy
grandes. Viendo los valores obtenidos se concluyó que el rotor Savonius empezaría a girar a menores
velocidades de viento que el rotor Blackwell debido a un mayor coeficiente de momento a valores de
TSR menores, por lo que un aerogenerador en contrarrotación con rotores Blackwell funcionaría mejor
en regiones con velocidades de viento más rápidas y sostenidas debido a su máximo a 0.8 TSR; mientras
que los rotores Savonius en contrarrotación pueden ser utilizados en zonas costeras urbanas donde se
presenten velocidades de viento cambiantes.
En las Figura 43 y Figura 40 se muestran los coeficientes de potencia para los rotores Savonius y
Blackwell, respectivamente, en ellas se observa como curva de coeficiente de potencia resultante es la
suma de los valores de los coeficientes de los rotores, sin tomar en cuenta perdidas por fricción o del
generador. El de CP del rotor Savonius tiene cambios pequeños entre 0.4 y 1.2 TSR por lo que la
producción de energía promedio sería mayor. Además, tiene un valor de CP a 1.2 TSR mayor que el rotor
Blackwell. Como se mencionó anteriormente, las revoluciones podrían controladas para mantener en
una zona aceptable la producción de energía debido a sus caídas repentinas de valor a 0.5 y 1.0 TSR.
Se concluyó que el uso de un aerogenerador en contrarrotación con rotores Savonius es más viable en
zonas donde las velocidades de viento son más variables, debido a su capacidad de mantener un par casi
constante. Un aerogenerador con rotores Blackwell es más apto en zonas con una velocidad de viento
específica muy frecuente o con generadores que cuentan con un sistema de control de velocidad.
Además, se comprobó que el uso de rotores dobles disminuye la velocidad de arranque y aumenta al
doble la eficiencia del aerogenerador, sin tomar en cuenta perdidas por fricción o el generador.
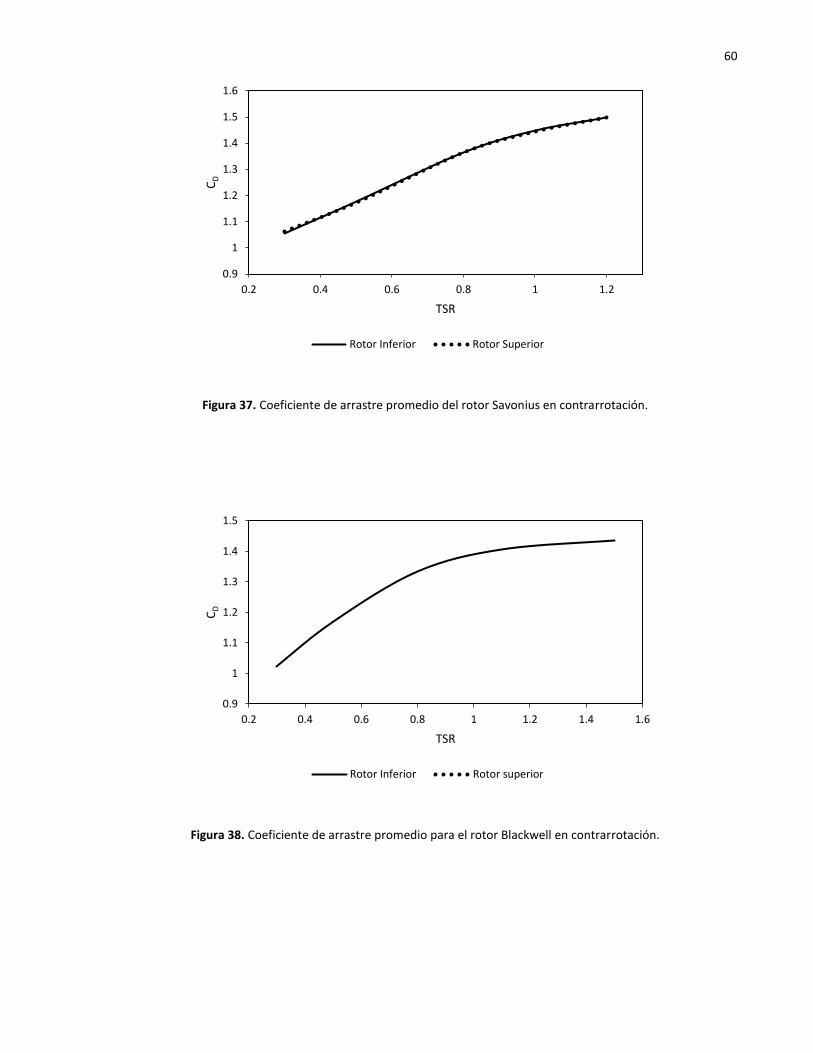
60
Figura 37. Coeficiente de arrastre promedio del rotor Savonius en contrarrotación.
Figura 38. Coeficiente de arrastre promedio para el rotor Blackwell en contrarrotación.
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
0.2 0.4 0.6 0.8 1 1.2
CD
TSR
Rotor Inferior Rotor Superior
0.9
1
1.1
1.2
1.3
1.4
1.5
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
CD
TSR
Rotor Inferior Rotor superior

61
Figura 39. Coeficente de sustentación para un rotor Savonius en contrarrotación.
Figura 40. Coeficente de sustentación para un rotor Blackwell en contrarrotación.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1 1.2
CL
TSR
Rotor Inferior Rotor Superior
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
CL
TSR
Rotor Inferior Rotor Superior

62
Figura 41. Coeficiente de momento promedio de un rotor Savonius en contrarrotación.
Figura 42. Coeficiente de momento promedio de un rotor Blackwell en contrarrotación.
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3
CM
TSR
Rotor Inferior Rotor Superior
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3
CM
TSR
Rotor Inferior Rotor superior
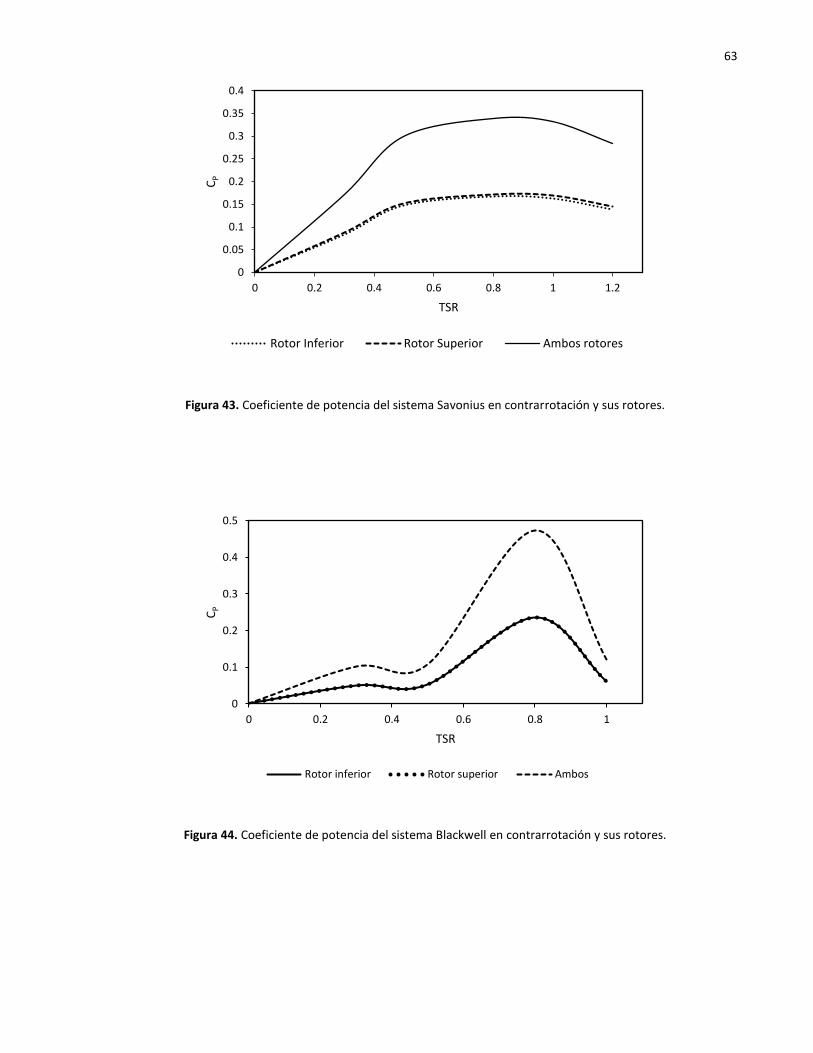
63
Figura 43. Coeficiente de potencia del sistema Savonius en contrarrotación y sus rotores.
Figura 44. Coeficiente de potencia del sistema Blackwell en contrarrotación y sus rotores.
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0 0.2 0.4 0.6 0.8 1 1.2
CP
TSR
Rotor Inferior Rotor Superior Ambos rotores
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 1
CP
TSR
Rotor inferior Rotor superior Ambos
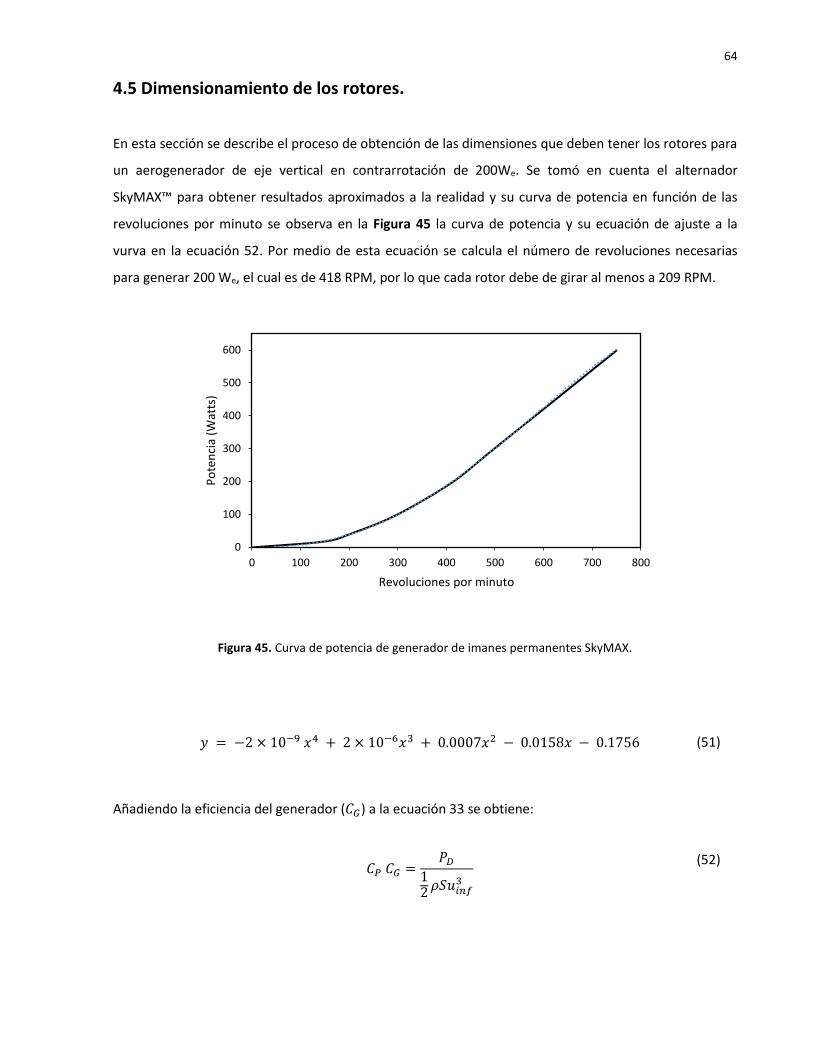
64
4.5 Dimensionamiento de los rotores.
En esta sección se describe el proceso de obtención de las dimensiones que deben tener los rotores para
un aerogenerador de eje vertical en contrarrotación de 200We. Se tomó en cuenta el alternador
SkyMAX™ para obtener resultados aproximados a la realidad y su curva de potencia en función de las
revoluciones por minuto se observa en la Figura 45 la curva de potencia y su ecuación de ajuste a la
vurva en la ecuación 52. Por medio de esta ecuación se calcula el número de revoluciones necesarias
para generar 200 We, el cual es de 418 RPM, por lo que cada rotor debe de girar al menos a 209 RPM.
Figura 45. Curva de potencia de generador de imanes permanentes SkyMAX.
𝑦 = −2 × 10−9 𝑥4 + 2 × 10−6𝑥3 + 0.0007𝑥2 − 0.0158𝑥 − 0.1756 (51)
Añadiendo la eficiencia del generador (𝐶𝐺) a la ecuación 33 se obtiene:
𝐶𝑃 𝐶𝐺 =𝑃𝐷
12 𝜌𝑆𝑢𝑖𝑛𝑓
3
(52)
0
100
200
300
400
500
600
0 100 200 300 400 500 600 700 800
Po
ten
cia
(Wat
ts)
Revoluciones por minuto

65
Donde PD es la potencia de generación deseada en Watts. Despejando S se consigue la fórmula para
obtener el área total de barrido que se presenta en la siguiente ecuación:
𝑆 =
𝑃𝐷
12 𝜌 𝐶𝑃 𝐶𝐺 𝑢𝑖𝑛𝑓
3
(53)
Se obtuvo la superficie total de barrido de los rotores utilizando el 𝐶𝑝𝑀𝐴𝑋 de los rotores Savonius y
Blackwell. Los valores tomados en cuenta fueron: eficiencia del generador igual a 0.86, densidad del aire
1.225 kg
m3 , y la velocidad del viento 4 m/s. Se aprecia en la Tabla 13 el area total del aerogenerador y el
area por rotor para Savonius y Blackwell.
Tabla 13. Área de barrido para aerogeneradores en contrarrotación.
Rotor Área (m2) Área por rotor (m2) Savonius 40.80 20.40 Blackwell 24.47 12.235
Se observa en la tabla un área de barrido muy grande por lo que es necesario repartir la potencia en
distintos rotores. Los valores de área por rotor y dimensiones para diferentes potencias se presentan en
la Tabla 14.
El área de barrido total de un solo aerogenerador en contrarrotación es similar a la utilizada por un
aerogenerador tripala de eje horizontal, pero la diferencia es que a 4 m/s el aerogenerador de rotores en
contrarrotación tiene la capacidad de generar energía mientras que el aerogenerador de eje horizontal
solo empezaría a girar. Usar un solo aerogenerador sería demasiado grande y no es recomendable
debido a que una falla haría que se tenga un desabasto total de energía, por lo que repartir la potencia
en varios aerogeneradores es lo más viable; el número de aerogeneradores y su tamaño dependerá de la
potencia eléctrica que se decida abastecer

66
Tabla 14. Dimensiones de rotores y número de aerogeneradores necesarios para generar 200 We.
Rotor Potencia (Watts)
Área por rotor (m2)
Diámetro (m)
Altura (m)
Número de aerogeneradores
Savonius 200 20.40 5.05 4.04 1 Blackwell 200 12.73 3.40 3.74
Savonius 100 10.20 3.57 2.86 2
Blackwell 100 6.37 2.41 2.65
Savonius 50 5.10 2.52 2.02 4 Blackwell 50 4.41 1.70 2.60
Savonius 25 2.55 1.79 1.43 8
Blackwell 25 2.21 1.20 1.84
Savonius 20 2.04 1.60 1.28 10 Blackwell 20 1.27 1.07 1.18
Savonius 10 1.02 1.13 0.90 20
Blackwell 10 0.64 0.76 0.84

67
Capítulo 5. Conclusiones
Se llevó a cabo un estudio de disponibilidad de viento para la ciudad de Ensenada, Baja
California. Se obtuvieron las curvas de probabilidad de Weibull para la velocidad y la rosa de los vientos
para la ciudad de Ensenada. Se llegó a la conclusión que se tiene viento constante 365 días del año y que
la velocidad promedio anual es de 1.4 m/s teniendo una probabilidad de velocidades mayores del 66% y
que dominan vientos tipo brisa marina y terrazón provenientes del oeste y secundarios del este y
noreste. Debido a estas características un aerogenerador tipo Savonius es la opción más viable a instalar
de los rotores estudia en una región con las características anteriormente mencionadas debido a su
capacidad de empezar a girar a bajar velocidades de viento y aceptar vientos provenientes de cualquier
dirección
Usando el programa de simulación Fluent, se realizaron estudios de independencia para obtener los
parámetros de simulación adecuados así como economizar recursos computacionales. Se obtuvieron
graficas CD, CL, y CM como función del ángulo de ataque y CD, CL, CM y CP como función del TSR para
rotores de topología Savonius, Blackwell y Modi en 2D, de topología Savonius y Blackwell en 3D y rotores
en contrarrotación.
En los resultados de las simulaciones 2D se pudo apreciar que el rotor Blackwell obtuvo un CPMAX de
0.2148 a 0.8 TSR y el rotor Savonius CPMAX de 0.204 a 0.8 TSR, mientras que el rotor Modi tiene valor de
CPMAX de 0.2176 a 0.8 TSR. Este valor cayó de manera abrupta a valores de 1.0 y 1.5 TSR para el rotor
Modi comparado Savonius y Blackwell, lo que reduce su rango de funcionamiento, por esta razón se
descartaron las simulaciones posteriores debido a que de las tres topologías, es la que conlleva más
trabajo al construir y no presenta un rango de funcionamiento tan amplio como los rotores Blackwell y
Savonius.
En las simulaciones 3D singulares, se observó que el coeficiente de arrastre fue menor en el rotor
Blackwell lo que se tradujo en un mejor desempeño del coeficiente de sustentación y coeficiente de
momento, haciendo que funcione mejor con velocidades de viento menores. El rotor Savonius trabaja
mejor a mayores revoluciones que el rotor Blackwell que lo vuelve apto para velocidades de viento
mayores.

68
En las simulaciones en contrarrotación el estudio de independencia de desfase demostró que no existe
una diferencia en los promedios de los coeficientes de arrastre, sustentación y momento, y que el
coeficiente resultante no es más que la suma algebraica de las fuerzas correspondientes de cada rotor.
Entre el desfase del rotor superior e inferior se pueden presentar problemas de vibración al haber
fuerzas que van en distintas direcciones, este problema se acentuaría más al tener un eje largo. Se
observó que los rotores Blackwell fueron tan eficientes como reportaron Blackwell et al. (1978),
teniendo así un CPMAX de 0.46 a 0.8 TSR permitiendo extraer una mayor cantidad de energía y que los
rotores Savonius tienen un CPMAX a 0.8 TSR de 0.33. Se concluyó que el rotor Blackwell es el más apto a
utilizar si las velocidades de viento son constantes y un rotor Savonius para velocidades viento variables.
Para concluir, se calcularon las dimensiones de los rotores del aerogenerador en contrarrotación, así
como la cantidad que se deben de instalar para poder suplir la demanda de energía de 200 We, tomando
en cuenta una velocidad de 4 m/s y una eficiencia del generador del 86%. Aunque el área de barrido
aparenta ser muy grande, es similar a la utilizada por un aerogenerador tripala de eje horizontal de 10
kW, pero la diferencia es que a 4 m/s el aerogenerador de rotores en contrarrotación generará energía y
el tripala solo empezará a girar. Se llegó a la conclusión que un solo aerogenerador en contrarrotación
sería muy grande además y en caso de que se presente una falla no habría abasto de energía, por lo que
se recomienda la instalación de un sistema descentralizado con 4 u 8 aerogeneradores.
Este proyecto demostró la viabilidad de utilizar 2 rotores de eje vertical girando en sentido contrario
acoplados a un solo generador para que por medio de la rotación relativa de sus rotores se aumenten las
revoluciones por minuto produciendo una mayor potencia a menores velocidades de viento, mejorando
la posibilidad de instalación de aerogeneradores para micro generación y disminuir la velocidad de
arranque. El trabajo a futuro de este proyecto consiste en la construcción del aerogenerador y la puesta
a prueba para medir su generación potencia a distintas velocidades de viento.

69
Literatura citada
Akwa, J. V., Vielmo, H. A., & Petry, A. P. (2012). A review on the performance of Savonius wind turbines. Renewable and Sustainable Energy Reviews, 16(5), 3054–3064. http://doi.org/10.1016/j.rser.2012.02.056
Anderson, A. (2013). The (Lost) Art of Wind Turbine Technology Selection: Cost, Brand Aren’t the Only Factors to Consider. TECH Briefs, 1, 4-8.
Batista, N. C., Melício, R., Mendes, V. M. F., Calderón, M., & Ramiro, A. (2015). On a self-start Darrieus wind turbine: Blade design and field tests. Renewable and Sustainable Energy Reviews, 52, 508–522. http://doi.org/10.1016/j.rser.2015.07.147
Blackwell, B. F., Sheldahl, R. E., & Feltz, L. V. (1978). Wind tunnel performance data for two- and three-bucket Savonius rotors. Journal of Energy, 2(3), 160–164. http://doi.org/10.2514/3.47966
Chaichana, T., & Chaitep, S. (2015). Performance Evaluation of Co-Axis Counter-Rotation Wind Turbine. Energy Procedia, 79, 149–156. http://doi.org/10.1016/j.egypro.2015.11.453
Dobrev, I., & Massouh, F. (2011). CFD and PIV investigation of unsteady flow through Savonius wind turbine. Energy Procedia, 6, 711–720. http://doi.org/10.1016/j.egypro.2011.05.081
Ferrari, G., Federici, D., Schito, P., Inzoli, F., & Mereu, R. (2017). CFD study of Savonius wind turbine: 3D model validation and parametric analysis. Renewable Energy, 105, 722–734. http://doi.org/10.1016/j.renene.2016.12.077
Ferroukhi, R., Lopez-Peña, A., Kieffer, G., Nagpal, D., Hawila, D., Khalid, A., … Fernandez, A. (2016). Renewable Energy Benefits: Measuring the Economics. IRENA International Renewable Energy Agency. Recuperado a partir de http://www.irena.org/publications/2016/Jan/Renewable-Energy-Benefits-Measuring-the-Economics
Golecha, K., Kamoji, M. A., Kedare, S. B., & Prabhu, S. V. (2012). Review on savonius rotor for harnessing wind energy. Wind Engineering, 36(6), 605–646. http://doi.org/10.1260/0309-524X.36.6.605
Harlow, F. H. (2004). Fluid dynamics in Group T-3 Los Alamos National Laboratory. Journal of Computational Physics, 195(2), 414–433. http://doi.org/10.1016/j.jcp.2003.09.031
Hau, E. (2015). Wind turbines: Fundamentals, technology, application, economics. Statewide Agricultural Land Use Baseline 2015 (Vol. 1). http://doi.org/10.1017/CBO9781107415324.004
Huda M.D., Selim M.A., I. A. K. M. S. and I. M. Q. (1992). The performance of an S-shaped Savonius rotor with a deflecting plate. RERIC International Energy Journal, 14(1), 25–32.
Hunt, J. C. R. (1998). Lewis Fry Richardson and his contributions to mathematics, meteorology, and models of conflict. Annual Review of Fluid Mechanics, 30(1), xiii–xxxvi. http://doi.org/10.1146/annurev.fluid.30.1.0
Inc., A. (2009). Ansys FLUENT 12.0 User’s Guide. Recuperado el 24 de septiembre de 2015, a partir de http://users.ugent.be/~mvbelleg/flug-12-0.pdf
Irabu, K., & Roy, J. N. (2007). Characteristics of wind power on Savonius rotor using a guide-box tunnel.

70
Experimental Thermal and Fluid Science, 32(2), 580–586. http://doi.org/10.1016/j.expthermflusci.2007.06.008
Ishimatsu, K., & Shinohara, T. (1993). Simulation of flow around rotating Savonius rotors. En Japan Society of Computational Fluid Dynamics, Proceedings of the 6th National Symposium on Computational Fluid Dynamics (pp. 691–694).
Jeon, K. S., Jeong, J. I., Pan, J.-K., & Ryu, K.-W. (2015). Effects of end plates with various shapes and sizes on helical Savonius wind turbines. Renewable Energy, 79(1), 167–176. http://doi.org/10.1016/j.renene.2014.11.035
Kamoji M. A., K. S. B. and P. S. V. (2008). Experimental investigations on single stage, two stage and three stage conventional Savonius rotor. International Journal of Energy Research, Int. J. Energy Res, 32, 877–895.
Kamoji M. A., K. S. B. and P. S. V. (2009). Performance tests on Helical Savonius rotors. Renewable Energy, 34(3), 521–529.
Kang, C., Zhang, F., & Mao, X. (2010). Comparison Study of a Vertical-Axis Spiral Rotor and a Conventional Savonius Rotor. En 2010 Asia-Pacific Power and Energy Engineering Conference (pp. 1–4). IEEE. http://doi.org/10.1109/APPEEC.2010.5448791
Khan, M. H. (1978). Model and prototype performance characteristics of Savonius rotor windmill. Wind Engineering, 2(2), 75–85.
Altan, B. D. and Atigan M. (2008). An experimental and numerical study on the improvement of the performance of Savonius wind rotor. Experimental Thermal and Fluid Science, 32, 1673–1678.
Manwell, J. F., McGowan, J. G., & Rogers, A. L. (2009). Wind energy explained. Wind Energy Explained.
Menter, F. R. (1994). Two-equation eddy-viscosity turbulence models for engineering applications. AIAA Journal, 32(8), 1598–1605. http://doi.org/10.2514/3.12149
Mithraratne, N. (2009). Roof-top wind turbines for microgeneration in urban houses in New Zealand. Energy and Buildings, 41(10), 1013–1018. http://doi.org/10.1016/j.enbuild.2009.05.003
Mitulet, L.-A., Oprina, G., Chihaia, R.-A., Nicolaie, S., Nedelcu, A., & Popescu, M. (2015). Wind Tunnel Testing for a New Experimental Model of Counter-rotating Wind Turbine. Procedia Engineering, 100, 1141–1149. http://doi.org/10.1016/j.proeng.2015.01.477
Modi, V. J., Fernando, M. S. U. K., & Roth, N. J. (1990). Aerodynamics of the Savonius rotor: Experiments and analysis. Proceedings of the 25th Intersociety Energy Conversion Engineering Conference, 5, 3–8. http://doi.org/10.1109/IECEC.1990.747953
Mohamed, M. H., Janiga, G., Pap, E., & Thévenin, D. (2010). Optimization of Savonius turbines using an obstacle shielding the returning blade. Renewable Energy, 35(11), 2618–2626. http://doi.org/10.1016/j.renene.2010.04.007
Mohamed, M. H., Janiga, G., Pap, E., & Thévenin, D. (2011). Optimal blade shape of a modified Savonius turbine using an obstacle shielding the returning blade. Energy Conversion and Management, 52(1), 236–242. http://doi.org/10.1016/j.enconman.2010.06.070

71
Moutsoglou A. and Weng Y. (1995). Performance tests of a Benesh wind turbine rotor and a Savonius rotor. Wind Engineering, 19(6), 349–362.
Nagai, H. U. I. and. (1989). Optimum design configurations and performance of Savonius rotors. Wind Engineering, 12(1), 59–75.
National Aeronautics and Sapce Anministration., & Goddard Institute for Space Studies. (2018). GISS Surface Temperature Analysis: Analysis Graphs and Plots. Recuperado el 30 de septiembre de 2017, a partir de https://data.giss.nasa.gov/gistemp/graphs/
Ogawa T., Y. H. and Y. Y. (1989). Development of rotational speed control systems for a Savonius-type wind turbine. Journal of Fluids Engineering, 111, 53–58.
Rajagopalan, R. G., & Fanuccit, J. B. (1985). Finite Difference Model for Vertical Axis Wind Turbines, 1(6), 432–436.
Rajagopalan, R. G., Klimas, P. C., & Rickerl, T. L. (1990). Aerodynamic interference of vertical axis wind turbines. Journal of Propulsion and Power, 6(5), 645–653. http://doi.org/10.2514/3.23266
Rajkumar, M. J., Saha, U. K., & Maity, D. (2005). Simulation of flow around and behind a Savonius rotor. International Energy Journal, 6(2), 83–90.
S.D., S. B. M. and P. (1992). Partially-blocked Savonius rotor. Applied Energy, 43, 239–249.
Sabzevari. (1977). Performance characteristics of concentrator-augmented Savonius wind rotors. Wind Engineering, 1(5), 198–206.
Savonius, S. J. (1931). The S-rotor and its applications. Mechanical Engineering, 53(5), 333–338.
SENER. (2016). Balance nacional de energía 2016. Recuperado el 5 de noviembre de 2017, a partir de https://www.gob.mx/cms/uploads/attachment/file/288692/Balance_Nacional_de_Energ_a_2016__2_.pdf
Shankar, P. N. (1976). The effects of geometry and Reynolds number on Savonius type rotors. Bangalore, India.
Shikha, Bhatti, T. S., & Kothari, D. P. (2005). Early development of modern vertical and horizontal axis wind turbines: A review. Wind Engineering, 29(3), 287–300. http://doi.org/10.1260/030952405774354859
Sivasegaram S. (1979). Concentration augmentation of power in a Savonius - type wind rotor. Wind Engineering, 3(1), 52–61.
Tong, W. (2002). Wind Power Generation and Wind Turbine Design. (Wei Tong, Ed.), WITPress (Vol. 44). WITPress. http://doi.org/10.2495/978-1-84564-
Wilcox, D. C. (1988). Reassessment of the scale-determining equation for advanced turbulence models. AIAA Journal, 26(11), 1299–1310. http://doi.org/10.2514/3.10041
Wilcox, D. C. (1998). Turbulence modeling for CFD. D C W Industries; Subsequent edition (Julio 1 1998).
Wood, D. (2011). Advances in Wind Energy Conversion Technology. (M. Sathyajith & G. S. Philip, Eds.),

72
Advances in Wind Energy Conversion Technology (Vol. 3). Berlin, Heidelberg: Springer Berlin Heidelberg. http://doi.org/10.1007/978-3-540-88258-9
Yaakob, O. Bin, Tawi, K. B., & Sunanto, D. T. S. (2010). Computer simulation studies on the effect overlap ratio for Savonius type vertical axis marine current turbine. International Journal of Energy Transactions A: Basics, 23(1), 79–88. http://doi.org/10.1.1.468.833
Zullah, M. A., Prasad, D., Choi, Y.-D., Lee, Y.-H., Wahid, M. A., Samion, S., … Sheriff, J. M. (2010). Study on the performance of helical savonius rotor for wave energy conversion. En AIP Conference Proceedings (pp. 641–649). http://doi.org/10.1063/1.3464913