Embed Size (px)
Citation preview

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 1/24
1
Chapter 6
AC Motors

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 2/24

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 3/24
3
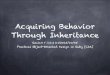
Stator/Rotor
Action
• The diagram to the
right demonstrates
one complete AC
cycle being appliedto the windings of an
AC motor

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 4/24
4
Stator Construction• Two-phase operation is necessary to create the magnetic field
conditions needed to generate torque in an AC motor
• Phase 1 is applied to the vertical stator windings
• Phase 2 is applied to the horizontal stator windings

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 5/24
5
Three-Phase• Three-phase power is commonly used in industrial factories
• Three-phase power is ideal for powering rotating stator fields in
motors

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 6/24
6
Rotor
Construction
• AC motors useelectromagnets for theirrotors
• Two methods are used forenergizing the rotor
– Connect an electricalcurrent to the windings
– Use induction as the meansof producing magneticfields

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 7/24
7
Types of Rotors
• Squirrel Cage - “cage” is made of aluminum or brass, connected to end rings
• Wound Rotors - rotor is wound with coils
of wire. The number of coils must be equalto the number of stator coils

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 8/24
8
Principles of Operation• The stator winding, when
energized, produces a
rotating magnetic fieldthat causes the motor toturn at synchronous speed
• However, the rotor willnever catch up to the
stator field
• Speed - determined byfrequency of the appliedvoltage and number of
stator poles per phase

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 9/24
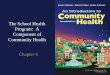
9
Speed and Slip
• Speed of a motor is determined by the following
formula:
– N = RPM
– P = Number of pole pairs
– f = Applied frequency– 60 = Formula constant based upon seconds/minute
N =f x66
P

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 10/24
10
AC Motor Synchronous Speeds

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 11/24
11
Single-Phase Induction Motors
• Single-phase commercial power is typically
supplied to residential customers
• AC induction motors require two phases
• Single-phase AC motors are classified by themeans of obtaining the two phases
– Resistance-start, induction-run
– Capacitor-start, induction-run
– Shaded-pole motor

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 12/24
12
Resistance-Start Induction-Run
Motor• Has two separate windings connected in parallel
– Main (run) winding
– Auxiliary (start) winding
• Start winding has high resistance

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 13/24
13
Capacitor-Start Induction-Run
Motor• Two windings, a start and a run winding
• Capacitor is placed in series with the start winding to obtain higher
starting torque
• At 70-80% of full speed, capacitor is disconnected by a centrifugal switch

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 14/24
14
Shaded-Pole Motor
• Uses a squirrel cagerotor and a mainwinding
• Uses shaded poles todevelop rotating field
• Shaded-pole motorsare useful in light loadapplications

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 15/24
15
Troubleshooting Split-phase
Motors
• The most frequent cause of failure incapacitor-start motors is a defective
capacitor
• Resistance-start motors usually fail as aresult of a defective centrifugal switch or
open start winding

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 16/24
16
Universal Motors• Usually classed as an AC
motor, but can operate on
DC voltages as well
• Similar to a DC series-wound motor
• Universal motors use a
laminated iron core versusthe solid iron cores of DCmotors
• Output torque is lesscompared to a DC motor

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 17/24
17
Three-Phase Motors• Most industrial motors operate on three-phase
power• Also referred to as polyphase motors
• Simpler in construction and more powerful thansingle-phase motors
• Three types:– Induction motor
– Wound-rotor motor
– Synchronous motor

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 18/24
18
Induction Motor
• Most industrial machines are powered bythree-phase squirrel cage induction motors
• Small size, efficiency, relatively low-cost

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 19/24
19
Rotating Field

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 20/24
20
Wound-Rotor Motor
• Rotor consists of a set of three coils in place of
conducting bars found in
squirrel cage motors
• Wound-rotor motors areused where speed and
torque need to be
adjustable

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 21/24
21
Synchronous Motor
• Synchronous motors turn at the same
speed as the stator’s magnetic field
• Synchronous motors perform two
functions:
– Convert electrical energy into mechanicalenergy
– Perform power factor correction

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 22/24
22
Synchronous Motor Construction
and Operation• The most common type of synchronous motor has two different
rotor circuits:
– Damper or amortisseur winding
– Squirrel cage bars
• Damper windings are locked on theouter periphery of the pole core on pole face
• The other circuit coils are wound onlaminated core bodies called salient poles

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 23/24

7/31/2019 Ch06 - AC Motors
http://slidepdf.com/reader/full/ch06-ac-motors 24/24
24
Power Factor Correction
• Synchronous motors are often used for power
factor correction in industrial settings
• Power factor correction is necessary because:
– Current-carrying capabilities of power systems are
reduced– Power companies assess penalties to industrial users
whose power factor is below a specified level