Embed Size (px)
DESCRIPTION
Chapter 9 Image Registration. Chuan-Yu Chang ( 張傳育 )Ph.D. Dept. of Computer and Communication Engineering National Yunlin University of Science & Technology [email protected] http://mipl.yuntech.edu.tw Office: EB212 Tel: 05-5342601 Ext. 4337. Introduction. - PowerPoint PPT Presentation
Citation preview

Chapter 9Image Registration
Chuan-Yu Chang (張傳育 )Ph.D.
Dept. of Computer and Communication Engineering
National Yunlin University of Science & Technology
http://mipl.yuntech.edu.tw
Office: EB212
Tel: 05-5342601 Ext. 4337

2醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Introduction Different medical imaging modalities provide specific information
about human physiology and physiological processes that are often complimentary in diagnosis.
To understand the physiological processes better, images obtained from different modalities need to be registered.
To study the variability of anatomical and function structures among the subjects, images from respective modalities can be registered to develop computerized atlases. Structural Computerized Atlas (SCA)
Represent the anatomical variations among subjects can be developed using registered image from the anatomical medical imaging modalities such as CT or MRI.
Functional Computerized Atlas (FCA) Represent the metabolic variations among subjects for a specific path
ology or function can be developed using registered images from the functional medical imaging modalities such as fMRI, SPECT or PET.

3醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
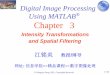
A schematic diagram of multi-modality MR-PET image analysis using computerized atlases.
Analysis
Functional Reference
(FCA)ReferenceSignatures
MR Image(New Subject)
PET Image(New Subject)
MR-PETRegistration
AnatomicalReference(SCA)

4醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Introduction
Image registration methods and algorithms provide transformation of a source image space to the target image space. The target image may be an image of the same or any
other subject from any medical imaging modality. Registration methods
External markers and stereotactic frames based landmark registration.
Rigid-body transformation based global registration. Image feature-based registration
Boundary and surface matching based registration Image landmarks and features based registration

5醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Image Registration Through Transformation
AB
f
g

6醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Rigid-Body Transformation
Rigid-Body Transformation is based on translation and rotation operations.
Two images of equal dimensions are registered by applying a pixel-by-pixel transformation consistently throughout the image space.
A rigid transformation based mapping of a point vector x to x’ is defined by
where R is a rotation matrix and t is translation vector.
tRxx '

7醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Rigid-body Transform
The translation and rotation operations of a 3-D rigid transformation.
Translation along x-axis by p
Translation along y-axis by q
Translation along z-axis by r
Translation of z
Translation of y Translation of x
Rotation by
Rotation by
Rotation by
zz
yy
pxx
'
'
'
zz
qyy
xx
'
'
'
rzz
yy
xx
'
'
'

8醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Rigid-body Transform
The translation and rotation operations of a 3-D rigid transformation.
Rotation about x-axis by
Rotation about y-axis by
Rotation about z-axis by
Translation of z
Translation of y Translation of x
Rotation by
Rotation by
Rotation by
cossin'
sincos'
'
zyz
zyy
xx
cossin'
'
sincos'
zxz
yy
zxx
zz
yxy
yxx
'
cossin'
sincos'

9醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Rigid-body Transform
The rotation matrix R for the x-y-z rotational order of operation can be given as
100
0cossin
0sincos
cos0sin
010
sin0cos
cossin0
sincos0
001
RRRR

10醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Affine Transformation
Affine transformation is a special case of rigid-body transformation that includes translation, rotation and scaling operations.
If the two image volumes to be registered are not at the same scale, a scaling parameter in each dimension has to be added as
where a, b, and c are the scaling parameters along x, y, and z directions.
czz
byy
axx
'
'
'

11醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Affine Transformation
The affine transformation can be expressed as
where A is the Affine matrix that includes the translation, rotation and scaling transformation with nine parameters.
The overall mapping can be expressed as
Axx '
11000
000
000
000
1000
0cossin0
0sincos0
0001
1000
0cos0sin
0010
0sin0cos
1000
0100
00cossin
00sincos
1000
100
010
001
1
'
'
'
z
y
x
c
b
a
r
q
p
z
y
x

12醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal Axes Registration
Principal Axes Registration can be used for global matching of two binary volumes such as segmented brain volumes from CT, MR or PET images.
Let us represent a binary segmented B(x,y,z) as
Let the centroid of the binary volume B(x,y,z) be represented by (xg, yg, zg)T
object. in thenot is z)y,(x, if 0
object in the is z)y,(x, if 1z)y,B(x,
zyx
zyxg
zyx
zyxg
zyx
zyxg
zyxB
zyxzB
zzyxB
zyxyB
yzyxB
zyxxB
x
,,
,,
,,
,,
,,
,,
),,(
),,(
),,(
),,(
),,(
),,(

13醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal Axes Registration The principle axes of B(x,y,z) are the eigenvectors of the inertia matrix I:
where
The method can resolve six degrees of freedom of an object including three rotations and three translations.
zzzyzx
yzyyyx
xzxyxx
III
III
III
I
zyxggzyyz
zyxggzxxz
zyxggyxxy
zyxggzz
zyxggyy
zyxggxx
zyxBzzyyII
zyxBzzxxII
zyxByyxxII
zyxByyxxI
zyxBzzxxI
zyxBzzyyI
,,
,,
,,
,,
22
,,
22
,,
22
),,())((
),,())((
),,())((
),,()()(
),,()()(
),,()()(

14醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal Axes Registration
Let us define a normalized eigenvector matrix E as
Let R=RRR represent the rotation matrix as
where , , and are the rotation angles with respect to the x, y, and z axes.
333231
232221
131211
eee
eee
eee
E
cossin0
sincos0
001
cos0sin
010
sin0cos
100
0cossin
0sincos
RRR

15醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal Axes Registration
By equating the normalized eigenvector matrix to the rotation matrix as
it can be shown that
RRRE
)cos/arcsin(
)cos/arcsin(
)arcsin(
32
21
31
e
e
e

16醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal Axes Registration Given two volumes, V1 and V2, for registration, the
PAR method provides the following operations: Translate the centroid of V1 to the origin.
Rotate the principal axes of V1 to coincide with the x, y a
nd z axes. Rotate the x, y and z axes to coincide with the principal a
xes of V2.
Translate the origin to the centroid of V2.
The volume V2 is scaled to match the volume V1 using th
e scaling factor Fs.3
2
1
V
VFs

17醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal axes Transformation
zyx
zyx
zyx
zyx
zyx
zyx
zyxV
zyxzV
z
zyxV
zyxyV
yzyxV
zyxxV
x
CentroidtheComputingStep
otherwise
boundarysurfacetheonzyxvoxelzyxV
,,
,,
,,
,,
,,
,,
),,(
),,(
),,(
),,(
,),,(
),,(
:2
0
),,(,1),,(
Step 1: Define the volume

18醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal axes Transformation
Step 3: Computing the principal axes: The principal axes of V(x,y,z) are the eigenvectors of the inertia matrix I:
zyxzz
zyxyy
zyxxx
zzzyzx
yzyyyz
xzxyxx
zyxVzzI
zyxVyyI
zyxVxxI
where
III
III
III
I
,,
2
,,
2
,,
2
),,()(
),,()(
),,()(

19醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal axes Transformation
zyxzx
zyxyz
zyxxy
zyxVxxzzI
zyxVzzyyI
zyxVyyxxI
,,
,,
,,
),,())((
),,())((
),,())((
The normalized eigenvector matrix E of I is then obtained with
333231
232221
131211
eee
eee
eee
E

20醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal axes Transformation Step 4: Computing the rotation matrix
The E is expanded to a product of rotation matrix by
311
211
321
sin
cossin
cossin
cossin0
sincos0
001
cos0sin
010
sin0cos
100
0cossin
0sincos
e
e
e
RRRE

21醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Principal axes Transformation Step 5: Computing the transform matrix
The registration of image 1 to image 2 can be obtained by a translation to the center of mass coordinate system followed by the transform matrix
TEE 21

22醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
A 3-D model of brain ventricles obtained from registering 22 MR brain images using the PAR method.

23醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Rotated views of the 3-D brain ventricle model shown in Figure 9.3.

24醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Iterative Principal Axes Registration The Iterative Principal Axes Registration method c
an be used with partial volumes. For registering MR and PET brain images. The IPAR algorithm allows registration of two 3D image d
ata sets in which one of the data set does not cover the entire volume but has the subvolume contained in the other data set.
Let V1 and V2 represent two volumes to be registered, the IPAR method can be implemented using the following steps:
1. Find the full dynamic range of PET data and select a threshold T, which is about 20% of the maximum gray-level value. Extract binary brain regions using a region growing method on the thresholded PET slice data.
2. Threshold and extract binary brain regions from the MR data using a region growing method.

25醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Iterative Principal Axes Registration
3. Stack 2-D binary segmented MR slices and interpolate as necessary to obtain cubic voxel dimensions using a shape-based interpolation algorithm.(3-D binary MR data)
4. Stack 2-D binary segmented PET slices and interpolate as necessary to obtain cubic voxel dimension to match the voxel dimension of brain MR data using a shape-based interpolation algorithm. .(3-D binary PET data)
5. Define a Field of View box, FOV(0) as a parallelepiped from the slices of the interpolated binary PET data to cover the PET brain volume
6. Compute the centroid and principal axes of the binary PET brain volume.

26醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Iterative Principal Axes Registration
7. IPAR algorithm
8. Interpolate the gray-level PET data to match the resolution of MR data to prepare the PET data for registration with MR data.
9. Transform the gray-level PET data into the space of the MR slices using the last set of MR and PET centroids and principal axes. Extract the slices from the transformed gray-level PET data that match the gray-level MR image.

27醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Iterative Principal Axes Registration The IPAR algorithm
For i =n to 0 do Compute the centroid and principal axes of the current binary
MR brain volume. Transform the augmented FOV (i) box according to the space
of the MR slices The PET data are registered with the MR data by performing t
he required translations and rotations1. Translate the centroid of the binary PET data to origin.2. Rotate the principal axes of the binary PET data to coincide with t
he x, y and z axes.3. Rotate the x, y and z axes to coincide with the MR principal axes.4. Translate the origin to the centroid of the binary MR data.
Remove all voxels of the binary MR brain which lie outside the transformed FOV(i) box.

28醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
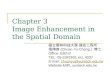
Three successive iterations of the IPAR algorithms for registration of vol 1 and vol 2: The results of the first iteration (a), the second iteration (b) and the final iteration (c). Vol 1 represents the MR data while the PET image with limited filed of view (FOV) is represented by vol 2.
Iteration 1 Iteration 2

29醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Iteration 3

30醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
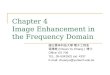
Sequential slices of MR (middle rows) and PET (bottom rows) and the registered MR-PET brain images (top row) of the corresponding slices using the IPAR method.

31醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Sequential slices of MR (middle rows) and PET (bottom rows) and the registered MR-PET brain images (top row) of the corresponding slices using the IPAR method.

32醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Sequential slices of MR (middle rows) and PET (bottom rows) and the registered MR-PET brain images (top row) of the corresponding slices using the IPAR method.

33醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Image Landmarks and Features based Registration
Once the corresponding landmarks or features are identified from in source and target image spaces, a customized transformation can be computed for registering the source image into the target image space. Relationships of corresponding points Relationships of corresponding feature such as surface

34醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Similarity Transformation for Point-Based Registration
Assume that x and y are the corresponding points in the source and target image spaces belonging to the source X and target Y images.
A non-rigid transformation T(x) for registering the source image into the target image space can be defined by a combination of rotation, translation and scaling operations to provide x’ from x as
such that the registration error E is minimized as
where r, s and t represent the rotation, scaling and translation operations.
tsrxx
yxTxE )()(

35醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Similarity Transformation for Point-Based Registration
A transformation should be obtained with r, s and t values to minimize the error function as
where wis are the weighting factors representing the confidence in the specific landmark (point) or feature correspondence and N is the total number of landmarks.
N
iiii ytsrxw
1
22

36醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Similarity Transformation for Point-Based Registration
To register the source image into the target image space
1. Set s=1
2. Find r through the following steps Compute the weighted centroid of the body representing th
e set of landmarks in each spaces as
Compute the distance of each landmark from the centroid as
N
ii
N
iii
N
ii
N
iii
w
yw
y
w
xw
x
1
2
1
2
1
2
1
2
,
yyy
xxx
ii
ii

37醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Similarity Transformation for Point-Based Registration
Compute the weighted co-variance matrix as
with a singular value decomposition as
where UtU=VtV=Iand
Compute
N
i
tiii yxwZ
1
2
tVUZ
0 ,, 321321 diag
tUVUVdiagr det,1,1

38醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Similarity Transformation for Point-Based Registration
3. Compute the scaling factor
4. Compute the translation factor
N
iiii
N
iiii
xxrw
yxrws
1
2
1
2
xrsyt

39醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Point-Based Registration
N
jjj
xp
xj
pj
pxN
Td
NNN
NjxX
NjpP
tRpp
1
2)(
1)(
,...,1},{
,...,1},{
)(
R is a 3x3 rotation matrix,t is a 3x1 translation vector,p is a 3x1 position vector.
<=Orthogonal Procrustes

40醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Surface-Based Registration
Outlining contours on the serial slices of each scan.
Head is a stack of disks or “prisms”, each of which has cross section determined by one of the contour.
Hat is represented as a set of independent points.

41醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Weighted Feature Based Registration Different optimization functions can be designed to improve
the computation of parameters of transformation for registration of the source image into the target image space.
A disparity function can be designed as
where {Xi} for I = 1, 2, 3, …, N represents a set of corresponding data shapes in x and y spaces.
The transformation T must minimize the disparity function register the source image into the target space utilizing the correspondence of geometrical features.
s iXN
i
N
jijijij yxTwTd
1 1
22

42醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Weighted Feature Based Registration Determine the parameters for a rigid or non-rigid b
ody transformation T. Initialize the transformation optimization loop for k
=1 as
For each shape Xi in the source space, find the closest points in the corresponding shape in the target space Yi as
where Ci is the corresponding function.
001
0
ijij
ijij
xTx
xx
ixi
kiji
kij NjYxCy ,,3,2,1,,

43醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Weighted Feature Based Registration
Compute the transformation between {xij(0)} and {yij
(k)} with the weights {wij}. Use the transformation parameters for registration
of the corresponding points as
Compute the disparity measure difference d(T(k))-d(T(k+1)), if the convergence criterion is met, stop; otherwise increment k and go to step 3 for next iteration.
01ij
kkij xTx

44醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Point-Based Registration
Determinate the coordinates of corresponding points in different images, and the estimation of the geometrical transformation using these corresponding point.
Intrinsic points: anatomic landmark Extrinsic points: artificially applied markers

45醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Surface-Based Registration
),(
)(1
)(1
2
jj
N
jjj
p
pTCy
pTyN
Tdp
The general approach is to search iteratively for therigid-body transformation T that minimizes the cost function:
is a point on the surface X
C is a correspondence function.

46醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Surface-Based Registration(2) Coarse registration: Principal axes Transfor
mation Fine registration: surface fitting A rigid body is determined by the position o
f its center of mass and its orientation with respect to its center of mass (principal axes)
Compute the centroid and the three principal axes for a 3-D volume data

47醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Surface fitting based on (E-Distance Transformation) The DT is performed on the 1st surface imag
es (base image) base image 2nd surface image (match ima
ge) to determine the registration parameters
matrixtiontransformatheisM
pppp
Mpqzn
yn
xnn
nn
),,(

48醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Surface fitting based on (E-Distance Transformation)
P
nnQ
zyx
pMDP
PQMF
functionObjective
RRRTM
1
2 )(1
),,(
1000
tmmm
tmmm
tmmm
z333231
y232221
x131211
DQ is the distance map of the base image Qpn is the nth point of match image P

49醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
ICP Registration algorithm Iterative Closest Point, ICP
1. assigning one shape to be the “data” shape
2. assigning other shape to be the “model” shape
3. The “data” shape is decomposed into a point set
4.The “data” shape is registered to the “model” shape by iteratively finding “model” points closest to the “data” primitives.
ICP registration method defines the “corresponding” point yj to be the “closest” point on the surface

50醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Volume-Based Registration 1. Roger P. Woods, Simon R. Cherry, and Jo
hn C. Mazziotta, ”Rapid automated algorithm for aligning and reslicing PET images”, Journal of Computer Assisted Tomography, 16(4): 620-633, 1992.
2. Roger P. Woods, John C. Mazziotta, and Simon R. Cherry, ”MRI-PET registration with automated algorithm”, Journal of Computer Assisted Tomography, 17(4): 536-546, 1993.

51醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Basic Assumption
If two image sets are accurately aligned, then the value of any voxel in one image set is related to the value of the corresponding voxel in the other image set by a single multiplicative factor,R.

52醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Basic Assumption
令 ri=ai/bi
where ai and bi is the value of voxel i in reference study and the corresponding voxel in reslice study.
r: standard deviation of ri over all voxels within the brain.
rmean: mean value of ri over all voxels within the brain.
Objective:
Minimize the r / rmean

53醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.

54醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Image Alignment Algorithm
Step 1:使用者指定 Reference study 與 Reslice study.Step 2: 使用者初步評估六個 reslice parameters, (x-,y-,z-
的旋轉與平移 )Step 3: Linear interpolation in z-axis, 產生 3D reference v
olume.Step 4: 利用 Step 2 的 reslice parameters 以 Trilinear int
erpolation 法 ,產生 3D reslice volume.Step 5: 計算 ratio volumn ri=ai/bi
Step 6: 利用 thresholding法 ,只留下腦部區域 . 並將其他地區的 ratio volumn設為 0. ( 對 reference volume)

55醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Image Alignment Algorithm
Step 7: 計算平均 ratio volumn rmean, 及正規化的標準差 r / rmean .(此比值越小 ,代表越 uniform)
Step 8: 調整 reslice parameters, 求出使 brain/ rbrain最小化的 reslice parameters參數值 .
Disadvantage:
1. 無法進行不同模組影像間的對準2. 計算複雜度很高

56醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
MRI-PET Registration
Two modifications: Edit the MR images to exclude nonbrain structures
prior to registration. Partitions the MR image into 256 separate compon
ents based on the value of the MR pixels. Seeks to maximize the uniformity of the PET pixel
values within each of these partition.

57醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
MRI-PET RegistrationStep 1:移除MRI中非腦部區域 .(人工 )
Step 2:使用者評估六個 reslice parameters, (x-,y-,z-的旋轉與平移 )
Step 3:Construct the 3D volume of MRI and PET
Step 4:計算MRI與 PET中相對應 voxels的平均值 a’j及標準差 j
Step 5: 計算
Step 6: 計算
Step 7: 調整 reslice parameters使‘’最小化
MRI為 referencePET為 reslice
''
j
jj
a
jj j
jj n
n'''

58醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
MRI-PET Registration Disadvantage
Segmentation是一件困難的事 無法適用於所有類型的醫學影像 , (打藥前後 )

59醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
不同對準法的比較
2-D Registration Point-Based Registration
缺點 :必須找出欲對準影像的特徵點包括 Intrinsic points( anatomic landmark) 及 Extrinsic points( artificially applied markers)
Lvv 優點 :
不需對影像進行特徵擷取的動作 . 缺點 :
由於不同模組影像特性不同 ,造成 ridge image會存在許多差異 .

60醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
不同對準法的比較
3-D Registration Surface-Based Registration
缺點 : 1.必須建立 3-D volume 2.必須找出每張影像的輪廓 ,以輪廓來進行 ,因此只適用於相同
modality的影像 . Volume-Based Registration (R. P. Woods ’92, ‘93)
缺點 : 1.無法進行不同模組影像間的對準 2.計算複雜度很高 3.不同模組影像的對準必須事先 segmentation,可是 segmentati
on是一件困難的事

61醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
不同對準法的比較
Iterative Closest Point(ICP) 缺點 :
1.必須事先求取影像的幾何特徵 .(point sets, line segment sets, triangle sets, surfaces, …)
2.

62醫學影像處理實驗室 (Medical Image Processing Lab.) Chuan-Yu Chang Ph.D.
Block diagram for the MR image registration procedure
MR ReferenceBrain Image
Data
Global RegistrationIPAR
Algorithm
MR NewBrain Image
Data
AnatomicalReference
Model
LandmarksLocalization and
VOICharacterization
Expert ViewerEditing andValidation
Low-ResolutionDeformation and
Matching
Spatial Relaxationand Constraint
Adapation
High-ResolutionDeformation and
Matching
Multi-Resolution DeformationBased
Local Registration andMatching