Embed Size (px)
Citation preview

Saad BargachIan FalconerCarlos MaesoJohn Rasmus�� !"#$Sugar Land
Ted BornemannRichard Plumb�� !"#!$
Daniel CodazziKyel Hodenfield��Clamart
Gary FordJohn HartnerAnadarko�� !�� !"#$Anchorage
Bill Grether�� !"#$%&'()�� !"Anchorage
Hendrik RohlerRWE-DEA AG���� !
�� LWD��� !
�� !"#!"$%&�� !"�
�� !"#$%� &'()*�
�� !"#$%&'()*+,-
�� !"#$%&'()*+'
�� !"#$%�� 5�� !"#���� !"�� !"# $%&
�� !"#$%&'()*+,��
�� !"#$%&'()*+,-.[2]
�� !"#$%&'�� !�"#
�� !"#$�� !�"#$%&
�� !"#$%&'()*+,-.
LWD�� !"#$%&'()�� !"#�� !"#$%&$'
�� !"#$%&'"#(�� !
�� !"#$%&'()�� !"
�� !"#$%&'()*+,-.��
���� !"#$Sugar Land�Tom BrattonIMarkFredetteIQiming Li � Lain Rezmer-Cooper��� Gatwick�Jim BristowX�� !"#$Anchorage�Jesse Cryer���Stavanger�Torger Skillingstad��
�� !"#Ian Tribe��� !"#!$%DougWaters�
AND�� !"#$%&'()*AIM�� !"�� !"#$APWD�� !"#$%&ARC5��
�� !"#$%&'()CDN�� !"#$%�� !CDR�� !"#$%&'()�� !��DTOR�� !"#$%&'DWOB�� !"�� !FMI�� !"#$%&'()*+,
�� GeoSteeringI=GeoVISIONIGeoVISION675I=IDEALE�� !"#$%!F�IMPulseI=INFORME��
�� F�InterACTI=InterACT Web WitnessI=ISONICEIDEAL�� !"#F�IWOB�� !"!#$%KickAlertI=M3IMACH-1E�� !"#F�MEL�� �� !"#$%PERFORM�PERT�� !"#$%&�� !"PowerDrillingIPowerPulseIRABE�� !�� !F�RWOB�� !"�� !"#$%&SHARPISlim 1I=SlimPulseI SPINE�� !"#$%�F�UBI�� !"#$%&'VIPER�VISION�VISION�� !"#$VISION475�VISION675�VISION825�� !"#$%&'
�� !"#$%&�� !"#
�� !"�� !"#$%&'()
�� !�LWD��� !"#$%&�� !"#$%&'�������
�� !"#$%&�'()�� !
�� !"#$%&'()�� !"
�� !"#$%�&'!()*%�
�� xNz=�� !"#$%&'()*
�� !"#$%&'()*+,-.
�� !"#$%&�� !"#$%
�� !"�� !"#$%&'(�
�� !"#$�� !"#$%&
��
�� !"#$%&%'()*�
�� !"#$%&'!"()*+,
�����58
�� !"#$%&'()*
�� !"#�� !"#$%&
�� �� !"#$%&'()
�� !"#$%&'()*+�
�� !"�#$%&'()*+
�� �� !"#$%& '(
�� !"#$%&'

�� !"#$%&[3]�� �� !
�� !"#�ROP���� !"#$�� !"J�� !"�� !��
�� !"#$%&'()*+��
�� !�� !"#$%&'()*
�� !"#$%&'()*�+��
������ !"#$%&'()*
�� !�� !"#$%�� !"
�� ![4]
�� �� !"�� !"#$
�� !"#$%&'()*+,-.
�� !"�� !"#$%&'()
1. Allen DIBergt DIBest DIClark BIfalconer IIHache J-MIKienitz CILesage MIRasmus J � Wraight P��Logging While DrillingI�Oilfield Review��1 ��
� 1 ��1987 � 4�� 4-17�
Bonner SIClark BIHolenka JIVoisin BIDusangJIHansen RIWhite J�Walsgrove T��Logging WhileDrillingWA Three-Year PerspectiveI�Oilfield Review�� 4 ��� 3 ��1992 � 7�� 4-21�
2. Allen FITooms PIConran GILesso B � Van de SlijkeP��Extended-Reach DrillingWBreaking the 10-kmBarrierI�Oilfield Review�� 9 ��� 4 ��1997�� !"#32-47�
Bonner SIClark BIHolenka J Voisin B. Dusang JIHansenRIWhite J�Walsgrove T��Logging While DrillingWA Three-Year PerspectiveI�Oilfield Review��4��
� 3 ��1992 � 7�� 4-21�
3. Bonner SI=Burgess TI=Clark BI Decker DI=Orban JIPrevedel BI=Luling M� White J��Measurement atthe BitW=A New Generation of MWD ToolsI�OilfieldReview�� 5��� 2/3��1993�4/7�� 44-54�
Bonner SIFredette MILovell JIMontaron BIRosthalRITabanou JIWu PIClark BIMills R � Williams R��Resistivity While Drilling-Images From the StringI��� ��� !� 8 ��� 1 ��1996�� �� 4-19�
Evans MIBest DIHolenka JIKurkoski P � Sloan WW
�Improved Formation Evaluation Using AzimuthalPorosity Data While DrillingI�SPE 30456�� !��� SPE�� !"#$!%&�� !"#�� !"1995 � 10 � 22-25 ��
Prilliman JDIAllen DF � Lehtonen LRW=�HorizontalWell Placement and Petrophysical Evaluation UsingLWDI�SPE 30549�� !�� SPE�� !�� !"#�� !"#$%&#'1995�10 � 22-25 ��
4. Rasmus JIBornemann TI Farruggio G � Low SW�Optimizing Horizontal Laterals in a Heavy Oil Reservoir
Using LWD Azimuthal MeasurementsI�SPE 56697��� �� SPE�� !"#$!%&��
�� !"#!$%1999 � 10 � 3-6 ��
5. Aldred WICook JIBern PICarpenter BIHutchinsonMILovell JIRezmer-Cooper I � Leder PC��UsingDownhole Annular Pressure Measurements to ImproveDrilling PerformanceI��� ��� !�10��
� 4 ��1998�� !"#40-55�
Aldred WIPlumb DIBradford IICook JIGholkarVICousins LIMinton RIFuller JIGoraya S�Tucker DW�Managing Drilling RiskI��� ��� !� 11��� 2 ��1999�� !"#2-19�
Plumb RIEdwards SIPidcock GILÉÉ=a� Stacey BW�The Mechanical Earth Model Concept and Its
Application to High-Risk Well Construction ProjectsI�IADC/SPE 59128�� !�� IADC/SPE�� ���� !"#$%&'()*2000 �2 �23-25 ��
Rezmer-Cooper II=Bratton T� Krabbe HW�=The Useof Resistivity-at-the-Bit Images and Annular PressureWhile Drilling in Preventing Drilling ProblemsI�=IADC/SPE 59225�� !IADC/SPE�� !"�� �� !"#$%&'2000� 2 � 23-25 ��
第二代(1993-1996) 第三代 (1997-2000)发展阶段
服务类型
地面控制系统
位/秒(bps)最大传输率
通讯方式
主要应用
MWD
创新
LWD
第一代(1988-1992)
仪器
快
3
传真
相关对比
地层评价
勘测
DTOR
M1-M3
Slim 1
DWOB
随钻地层评价
井眼补偿电阻率
双间距电阻率
密度-中子电阻率
CDN
CDR
提供结果
PERT
SPIN
MEL
最大密度
快速直观 地层 评价
各项异性
定性电阻率重叠
仪器
IDEAL
6 到10
InterACT
在油藏中成功地质导向
地层评价
IWOB
RWOB
PowerPulse
SHARP
MVC
方位读数
电阻率图像
阵列电阻率
钻头电阻率
带仪器马达
钻头地震
ADN
ARC5
GeoSteering
IMPulse
RAB
ISONIC
超声井径仪
提供结果
钻杆冲洗
碰撞报警
TR 防撞
动力钻井监测器
钻头牙轮琐定
智能报警
MACH-1
象限密度
相关对比显示
地质导向显示
INFORM
仪器
12到16
InterACT 网络显示
钻井效率和风险管理的实时决策
地质导向至储层最佳部位
AIM
SlimPulse
VIPER
提高精度
井眼尺寸范围更大
非化学源
实时图象
提高了可靠性
Seismic MWD
VISION475, 675, 825
ARC312, ARC900
孔隙度评价工具
APWD
提供结果
PERFORM
密度图像
INFORM 3D
快速直观VISION
==�� !�LWD��� !"�MWD��� !"#$%
2000�� ! 59
>
�� !"#$%&'()*+��
�� !"#$%&'()*+,-.
�� !�� !"#$%&'()*
�� !"#$%&'()�� !"
�� !�� !"#�MEM���
�� !"#$%&[5]�� !"#�

�� !"#$%&'(!)*+,-.
���� !"#$%&'()*$+,
�� !"MEM�� !"�� !"�� !"#$%&'()*+,-./
�� !"#$%&'(
�� !"#$%&'()*+
�� !"#$%&'(%)�� !"
�� !"#�� !"�� !"#$
�� !"#$%&'(()*+,-.
�� !"#$%�� !"#$%&'
�� !"#�� !"#$%&'()
�� !"#$%&'()*+,*!
���� !"#��� !"#$%
���� !"#$%"&'()���
�� !"#$%&'�� !"#
���� !"#$%&'()*+,
�� !"#$%&�� !"#$
���� !"#$%&'(�� !
�� !"#$%&'()*+,2�x6��z��� !"#$%0.35�x1��z�� !"#�� !"#$%&
�� !"#�� !"#$%&'(
�� !"#$%&'[6]�� ��
�� !"#$%&�� !"#��
�� !"#$%&'(�� !"#
�� �� !"#$%&'(
�� !"#$%&�� !"#
�� !"#[7]
�� LWD�� !"#$%&'�� !�"�� !�� !"#$
�� !"�� !"�� !"��
�� !"#$%[8]�� !"LWD�
�� !"#$�� !"#$%&'
�� !"#$%&'�� !"#$
�� �� !"#$
�� !"#$
�� !"#$%&'()*+,
�� !"#�� !"#$%&'
�AIM��� VISION�� !"#$�� !"#$%&'()*�� !
�����[9]
�� !"#$%�� !"#$
�� ! "#$�� !"#$%&
�� !�� !"#$%&�� !
�� !"#$%�&'()*+��
�� !"#$%&'()*+&,&
�� !�� !"#$%&'()*
AIM�� !"#$%&'(�� !
> �� !"#$AIM ���� !�� MWD�� !�� �� !�� !"�� �� !"#$%&'6 1/
8�� !"#�� !"MWD�� !"#$%&�MWD�AIM
�� !"#$%&'(�� !""#0.2��0.3���� !"#$%&'�BHA���
�� !"#$%&'()�� !"#$%&'(�� !"#$%�BHA�� !"#���� !"#$%&'()*+,
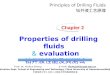
> �� !"#$�� !"#$%&'()*+,-./0 3�� �� !"�A��B���� !"#$%&'()*+,�BHA������ ! 6.5�� �� !"�� !�C ���� GeoSteering�� !"#$%�� !"#$%2.2�� �� !"#$%&'(�� !"�D���� !"#$%& AIM�� !"#$�� !�� !"#$% 1�� C��D��� !"#D�� !"#3���
93.5
93.0
92.5
92.0
91.5
91.0
90.5
90.0
89.516,700 16,800
倾斜
,度
测量深度,英尺
16,900 17,000 17,100 17,200 17,300 17,400 17,500 17,600 17,700
垂直段,m
真垂
直深
度,
m
0 400
X49
X50
X51
X52
X53
X54
X55
X56200 600 800
深度容差上限
深度容差下限A
D
B
C
1000 1200
C 采用 GeoSteering 仪器钻井D 采用 VISION475 和 AIM 仪器钻井
A, B 未采用GeoSteering 仪器钻井
�� !"#$%&'()*+,-.
�� !"#$%&'()*�� !"
��� !"#$%& 12�� !"���� !"#$%&'()*+,
�� !"#�� !"#$%&'(
�� !"#�� !"#$%&'�
�� !"#$%&'()*+,��
�� !"#$%&'()*+,-&
�����60

�� �� !"#$�� !"#$
�� !"#$%&'�� !"#$
���� !"#�� !"#$%&
�� !"#$%
�� !"#$%&'()��
�� !"#$%&'(4�x13��z�
�� !" 12�x39 ��z��� 1��� 6 �� !"#$� !%&���� !"�#$%&'()*+
�� !"#$%& 1�x� 3��z��
�� !"#$%&'�� !"A�B���� !"#$%&'()*+,
�� !"�BHA���� !"#$%�� 2 �x6.5 ��z��� !"��
������� 3 �� !"#$%GeoSteering�� !"GeoSteering �
�� !"#$%&�� !"#$%
�� !"#$%& 2.5 �x8 ��z��
�� !"#$%&'()*+,-
� 0.7 �x� 2.2 ��z��� !"#$
�� 8 1/2�� �6�� !"#$���AIM�� !"#$%&�� !�� !"#$%&0.3�x�0.9��z�
�� !"#$%&'( 3�� !��� !"#$%&'()*�� !
�BHA�� !�� !4�� !��� !"#$%&'()*+,-�
�� !"#$%&'�� !"#$
�� !"#$%�� !"#[10]
�� VisionV I S I O N �� !"#$% &
LWD�� !"�#$%&�� !"�� !"#$%&�� !"#��
�� !"#$�� !"#$%&"
�� !"��� ��VISION�� �� !"#$%&'()*+,-.
�� !"#$% RAB�� !"#�� !AND�� !"#$%�� �� !"#$%�� !"#$%&
�� !"#$%&'()*�� !
�� !"#$%&'(�� !"#
�� APWD�� !"#$%&'(�� !"#�� !"#$%��
�� !"[11]
�� !"#$%&VISION�� �� !"#$%&�� !"#$�
�� !�� !"#$%&'()�
�� !"#$GeoVISION�� !"�� !"#$%&'()�� !"
�� !"#$ 16�� !"# 56�
�� !"#�� !"#$%&'#
�� !"#$%&#'(VISION��
��� !"#$%&'(�� !"
���� !"#$%&'( BHA��
�� !" VISION�� !"#� 4 3/4�� �� VISION�� !"#�� 6 3/4 ��BHA��� VISION475��� !"# 6 1/4�� !"#��
� VISION675�� ! 8 - 9 7/8��
��[12] �� !" VISION825�� !12 1/4�� !"VISION�� !"#$�� !"#$AIM�� GeoVISION�GeoSteering�� IWOB�� !"��� �� !"#$%!�IDEAL��
�� !"#$% ISONIC�MVC�� �� !"��
�� !"#$�� !"#$%
6. Pogson MI Hillock PIEdwards J � Nichol G��Reservoir Optimization in Full-Field Development Using
Geosteering Techniques to Avoid Existing ProductionCompletionsI�SPE 56452�� !�� SPE��� !"# $%�� !"#$#%1999� 10� 3-6 ��
Edwards J��Geosteering Examples Using Modelingof 2-MHz Resistivity LWD in the Presence ofAnisotropyI�SPLWA � 41�� !"#�� �� !"# $2000� 6�5-7���� NN�
7. Brown TIBurke TIKletzky AIHaarstad IIHensley JIMurchie SI=Purdy C� Ramasamy A��In-Time DataDeliveryI��� ��� !�11���4��1999/2000�� !"#34-55�
8. Aldred ���� ! 5�
Rezmer-Cooper II=Rambow FHKI=Arasteh MI=HashemMNI=Swanson B=� Gzara KW�Real-Time FormationIntegrity Tests Using Downhole DataI�IADC/SPE 59123�� !�� IADC/SPE�� !"��� !"#$%&'()2000�2�23-25��
9. Varco MISmith JE� Stone DM��Inclination at thebit Improves Directional Precision for SlimholeHorizontal Wells-Local Case HistoriesI�SPE 54593��� �� SPE�� !"#$�� !"�� Anchorage�1999� 5 � 26-28 ��
10. Skillingstad T��At-Bit Inclination MeasurementsImproves Directional Drilling Efficiency and ControlI�IADC/SPE59194�� !�� IADC/SPE�� ���� !"#$%&'()*2000�2�23-25 ��
11. Aldred ���� ! 5�
12. Bornemann EIHodenfield KIMaggs DIBourgeois T�Bramlett K��The Application and Accuracy ofGeological Information From a Logging-While-DrillingDensity ToolI�SPWLA� 39�� !"#$%&�� !"#$KeystoneI1998�5�26-29��
�� L�
Bourgeois TJIBramlett KICraig PICannon DIHodenfield KI Lovell JIHarkins R � Pigram I��Pushing the Limits of Formation Evaluation While
DrillingI��� ��� !�10���4��1998�� !"#29-39 ��
13. Bourgeois ���� ! 12�
> �� VISION�� �� !"#$%&'() J�� !"#$%&' 4 3/4�� 6 3/4
�� �� !"#$%&'()*$%+,-./012 6 3/4�� �� !"#$%
PowerPulse MWD�� !" #$%&'(�� !"#$%&'()*+,-)IDEAL��� !"#�� !"#$%$&'(�)*+,-GeoVISION�� !"GeoSteering �
�� !
VISION 密度中子
PowerPulse
VISION 电阻率
综合钻井评价与测井(IDEAL )井场信息系统 GeoVISION
电阻率钻头处倾斜测量
(可选项)
GeoSteering 仪器(可选项)
VISION675/475
GeoVISION675
2000�� ! 61

�� !"#$%&�� !"#$%
�� !"#VISION�� !"#$
�VADN��� !"#AND�� !"�� !"#$%"&13�� !"#�� !"#$%&'6�� �� 16�� !"#$%�� !"#$%��� !"#AND�� !4�� �� !!"#$%&'()*+,#
�� !"#$%&'()*+��
�� !"#$%&'()*+,-.
�� !"#$�� !"#$%&'
�� !"#$%&'()�� !"
�� !"#$%&'()*+,-.
�� !"#$%&�� !"#$%
�� �����
�� !"#$%&'�� !"
�� !"#$%&'()*+,-.
�� !"#$�� ��BHA�� �� !"#$%&'()*+,-.
�� !"#$%&'()*+��
�� !"#$%&'()*+��
�� !�� !"#$%&'()*
�� !"#$%&�� !"#$%
���� !"#$�� !"#$[14]
�� !"#$�� !"#$%&'
�� !"#$%&'()*+,-.
�� !"#$�� !"#$%�&
��
�� !"#$%&'()*��
�� !�"#$%&'()*+,-
�� ��� !"#$��%&'�
�� !"#$%& '()*+,
���� !"#$%&'()*+,
�� !"#$%&'()*+,-.
�� !"#$%&'�� !"#$
�� !"#$%&�� !"#$%
�� !"#$%&'()*+,-.
���� !"#$
�� 6 3 / 4 �� !"#$%&
BHA�GeoVISION�� !"# VISION�� !"#$%&'()*+,-
���� !"#$%&'()*��
�� !"#�$�� !"#$%&
���� !"#$%&'()*+
GeoVISION�� !" RAB�� !���� !"#$%&'()*+,
�� !"#$%&'()*+,--
�� !"#$%&'()*�� !
�� !"#$%GeoVISION�� !�� !"#$%&'()�� !"
�� 10 � 1�� !" 5� 1����
�� !"#$%RAB�� !"#$�� �� !"#$%&'(
GeoVISION�� !"#$%&'()56�� !"#$%&'()*+,�� !��� ����
�� !"#$%&'()*��
�� !"#$%&'()*+,��
�� !"#$%&'(�� !"#
� GeoVISION�� !"#$%&'(LWD�� !"#$%&'()
�� !"#$%&'(�� !"#
�� !"#$%&GeoVISION�� ��LWD�� !�� !"#$%&�� !"#$% FMI�� !" 5���� ������ !"#$%&'
�� LWD�� �� !"#$%&'()*��
�� !"#$%&'()*+�N�
�� !"#$%&'()*+,-�
�� !"#$%&'()*+,-.
���� !"#$%&' 60�130��x18�40�z�� !"#$%&'(
���� !"#$%&'()*+,
�� !"#$%&'()*+,-$
�� !"�� !"#$%&'()
�� !"#$� 2�� !"#$%�� !"#$%&'()*+,-.
�� !"#0.1�L�� !"�3��� !"#$%&'() BHA ��
�� !"#$%&'()*+,-.
�� �� !"#$%&'(� 4��� !"#$%&�� 30�L��
�� !�� 200��L��x61�L
��z����� !"#$%&��
�� !"#$%&'()*&+
> VISION�� !"#$%&� 1�� !"#$�TVD��� ! "#$%&'()*+�� !"� 2�� !"#$%�� !� RwaE�� !"#F�� 3�� !"#�� �� !"#$%&'()*� 4 �� VISION�� �� !"#$%&� 5�� !"#$���� !"#�� !"#�� !"Pe��� 6�� !"#$�� !"#$%&'�� !"�� !"!#$%&'()*+,-./012�� !"#$%&'()*+,
�� !"Pe�� !"#!$%6�� 2�� �� !"#$�� !"#$%&'(�� !" 0.2�L�� !"�� !"#$"%&'()�� !"#$%&�� !"
�� !"#$%&'()*+,-./01234�� !"#$%&'()*+,-./
�� !�� !"#$%&'()*+,-./
倾角指出钻到构造
RHOB 成像
成像方位U R UB L
2.05
Pe0 10
底部密度1.95 2.95
中子0.45 -0.15
2.45g/cm3
g/cm3底部密度
总体积
Rwa-CTVD
钻头-电阻率时间ft0 10 ohm-m0 10
0 10hr
X900
Y000
Y100
GR0 10API unit
有效孔隙度泥岩石灰岩束缚水
1.95 2.95
相移电阻率0.2 2000ohm-m
ohm-m ft3/ft3
�����62
14. Maeso CISudakiewicz N� Leighton P��FormationEvaluation From Logging While-Drilling Data in a 6.5Inch Horizontal Well-A North Sea Case StudyI�SPWLA�40�� !"#$%&�� !"#1999�5 � 30 � -6 � 3 ���� K�

�� !"#$%&'(
�� !"#$%&''()*+
�� !"#$%&�VISION�� !��� !�� !"#$%&''(
�� !"#$%&'()*+,-.
�� !!"#$%&'()*+,
INFORM��� !"#$%&'()
�� �� !"#$%&�� !"
�� !"#$%&�� !"��
�� !"#$%&'(�� !"#
���� !"#$#%&'(��
�� !"#$%&'()*+,-.
�� !"#$%�� !"#$%&
�� !"#$%&'()*+,-.
�� !"#$%
�� !"# Cook Inlet�� !�� !"#$%&'()*+,-.
���� !"#$%&'()��
�� �!"#$%&'()*�+,
�� �� !"#$%&�� !"
�� !"#�� !"#$%%
Anadarko�� ! Lone Creek 1�� �� !"�� !FMI�� !"#�� !"�� !"#$�� !"
�� !"#$FMI�� !"��
> �� !�LWD��� !"#$�WL���
�� 6�� !"#$%&'()�� !"�� !"#$%&'(�� !"VISION��
�� !�LWD��16 ��GeoVISION=ELWDFI56��UBI�� !"#$�WL��cjf�� !"
�� !"#$%&'�WL��
图像分辨率,相对像素
1英尺比例
VISION GeoVISION UBI FMI
> �� ! RWE-DEA�� !" VISION�� !"#$%&� 1�� !"������ !"�� !"�� !"#�� !"#�2�� !"#$�� !"#�� !"#$%�� !�� !"#$�3�� GeoVISION�� !"#���� !"�� �� !"�� !"#�� !"#$�
�� !"�� !"#$%� 4�� !" 56�� !"#"$%&'()�� !�� !"#$%&'()*�� !"#$%&'()*+,-.
�� !"#
RAB自然伽马,
上,实时API
N
S
EW
RAB自然伽马
下,实时API
倾角方位
真倾角:地层与北方向
度
X025
3050
50 150
50 -10 90150
井眼偏差度
井眼方位
道1方位
0 100
倾角方位
环带电阻率
2 200
深底部上
2 200
视倾角:地层与井眼顶部方向
度
0 100
深底部下
2 欧姆米
欧姆-米
欧姆-米
200
钻头电阻率 电导性
RU B L U
电阻性2 欧姆米 200
2000�� ! 63

�� !"BHA�� !"#$%��
�� F M I �� !"#$%&GeoVISION�� �� !"#$%&�LWD�� !"#$%&'()*+�� !GeoVISION�� !"#$%�� !"#$%&'�� !"#$
�� ������� !"#$"%�
�� !"#$%&'()*+,-.
�� !"#$%&'(��
GeoVISION�� !"#$%&'()�� !"#$�� !"#$%[15]
�� !"#$%&'()'*+
���� !"#$%&'()*+,
�� !"#$%�&'()���
����� !"#$%&'()*+�
�� !"#$%&'()*+,-.
���� !"#$%&'!()*�
�� !"#$%&'([16]�� !"
�� �� !"#$%%&' 6��
x15��z��� !VISION�� !"�� !"#�� !"#$%&'(
���� �� !"# 85�� !"�� 1��x2.5��z�� !"#$
� 1 ��x30 ��z�
15. Ford GI=Hartner J Grether BI=Waters D � Cryer JW�Dip Interpretation from Resistivity at Bit Images (RAB)
Provides a New and Efficient Method for EvaluatingStructurally Complex Areas in the Cook Inlet, AlaskaI�SPE54611�� !�� SPE�� !"#$��� !"#Anchorage�1999�5�26-28 ��
16. Rosthal RAIBornemann ETI=Ezell JR� SchwalbachJRW�Real -Time Formation Dip From a Logging-While-Drilling ToolI�SPE 38647�� !�� SPE��� !"# $%�� !"#$ S a nAntonioI1997 � 10� 5-8��
> �� ! GeoVISION�� !"����� FMI ������� ��
�� !"#$%&'()*� +",#$%-./01�� !"#$%
�� !"#�� !"#$%&'()*&'+�� !"#$����
FMI�� !"����� !"
XX30
地层倾角,度0 90
地层倾角,度0 90
XX40
XX50
XX60
XX70
XX80
U R BVISION FMI
L U
> GeoVISION �� !"#����� !"#$%����� !
0U R B L U
XX40
XX45
XX50
地层倾角,度0 90
U R B L U地层倾角,
度 90
�����64

�� !"#$%&'()*+,
�� �� !"#$%&'()*+
�� �� !"#$%&'()*+
�� !"#�� !"#$%&'(
�� !"#$%&'(�����
�� !"#$%�� !"#$
�� !"#$%&'(Faja�� ��� !"#$%&Faja�� !"#
���� !"#$%&'()*+
���� !"20�40��x6�12�z�
�� !"#$%&'()$%*+�
�� !"#$%�� !"#!$%
�� !"#$%&'()*+,-.
��GeoVISION�� !"#$�� �� !"#$�� !"#$%!&
�� !"#$%�� !"#$%&
�� !"#$%&#'()*+,-
�� !"�� !"#$%&'(
���� !"#$%&'()*+,
��
�� !"#$%&%'()*+
�� !" 4000��x1220�z�� �
� 3D�� !"#$%&'()*+�� !"#$�� !"#$%&'
> �� !"#$%&�GeoVISION�� !"#����� !"#$%&'��
�� !"#$%&'()*������ !"#$%&'()*+,-./01
���� !"#$%&
X100
X200
X300
X400
X500
X600
X700
X800
0 地层倾角,度地层倾角,度 90 0 90
2000�� ! 65

�� !"#$%&' 500�� !��� !"#$�%&'()*+,
50�� !�� !"#$%&'��
�� !"#$%&'()*+,-.
�� !"#�� !"#�� !"
75%�� !"#$%&'(#)*�� !"#$%&'()*+,
�� !"#$%&'()'*"��
����� !"#$%&' !()
�� �� !"#$%&'()*+
���� !"#$%&'()*+,
�� !"#$%&'()*+,��
�� �!"#$%&'()*+,-
���� !"#$%� 3530�� 3560�� !"#$%�� !"#$�� �!"#$%�� !"#$%
�� !
�� !"# 3D�� !"#$�� !"#$%&!'������
�� !"#8 1/2�� !"#$50��x15�z�� �� !"#$%&'
�� !"#$%&'(�� !"#
�� !"#$%&'()*+,��
�� !"#$%&�� !"#$%
�� !"#$%&'(�� !"
�� !"#�� !"#$%&
�� !"#$%&'()�� !"
�� !"#$%&'()*+,-.
�� !3545 �� -3560�� !"#�� !"40�� !�� !"#$�� !"#$%&'()*+,��
�� !�� !"#$%!&'()
�� !"#$%&'()*+,-.
�� !"#$%&'()[17] �� !
�� !"#$%&'()*+,-.
��
==GeoVISION�� !"#$%&'()*+,-./012�
�� !"#$%&'()*+� 1�� !"#$%�� !�� !"�� !"#$%�� !�� !"�2�� !"�� !"#$%�� !�� !"�� !"�� !"#$%�
�� !"#$%&'�3�� !"#$"%&'()�� !�� !"#$%&'()�� !"#$%&'()*��
�� !"#$%&� 4�� !"#$�� !"#$%&�
�� !"#�� !"#$�� !"#$%�� !"#$%
�� !"#$%&'�� !"#$%&'()*+,-."/
�� !"#$%&'()*+,-�� �� !"#$%&
�� !"#!$�� !"#$%&'()*
GeoVISION�� !"#�$�� !"#$"#%&'(�� !"#$%�� !" 8 1/
2�� �� !"#$%&
3500������2550�������� !"#$%&'��
�� !"#$%&'
TVD
RPM
ROP5ft/hr2000 0
80
度0 360 欧姆 米0.2 2000
cycles/sec
GeoVISION 深电阻率水平比例尺: 1:13与井眼顶部方位
线性比例
北标记曲线 GeoVISION欧姆 米
深图像
0.0
1.0
2.0
3.0
8.0
4.0
5.0
6.0
7.0
13.0
14.0
12.0
11.0
10.09.0
GeoVISION 深底部 上
GeoVISION 深底部 下
高电阻率下
高电阻率上
2060 2030ftDEVIdeg
HAZIdeg
0.2 2000欧姆 米
0.2 2000欧姆 米
1:200ft
自然伽马 上API0 100
API0 100自然伽马 下
上
下
3500
3550
91.1215/270.306
89.9046/270.98
3500 英尺 2550 英尺
�����66
>>

�� !"#$%&'()*+,
�� !"#$%&#'()*+,-
���� !"#$%&'()*��
�� !"#$%$&'()*+,-
�� !"#$%��VISION�� !�� !"�� !"#$%&'()
�� !�� !!"#$%&'()
�� !"#������� !��
�� !"#$%&'(()*+,-
���� !"#$%& !'(��
�� !"#$$%&�� !"#$
�� !"#"13�J=35���� !
�� !"#$%"&'()*"+,
�� !" B�� !"#$%&'�� !
�� !"#$%&'( LWD �
�� !"#$%&'�� !"#$
�� !"#$%&'()*+,-�
�� !"#$%&'()*+,-.
�� !"#$%�� !"#$%�
�� !"�� !"#$%&'()
�� !"�� !"#$%��
VISION�� !"#$%&'()*���� !"#
==�� !"#$%&'()*+,�� !"
�� !VISION�� !"�� !"#$%&������� !�1�� !"#$%� 2��� !"#$%&'(�� !"#$%&
�GR��� !"#�� !"#$%&��3��
P34H���� !"�#$��4��TNPH�ROBB����5�6�� !"#$%&'!()*+,-�� !"�� !"#$%&'()*+,-
��7�8 ���� !"#$%&'()#*�
�� !"#$%&'�� !"�� !"#
���� !"#$�%
13° / 332° NNW
不整合
D
E
H
30到40英尺宽的断层拖拽层
基底 B无明显角度不整合
在H顶部的不整合
在H顶部的不整合
13° to 35° / 330° NNW
断层
15° / 331° NNW
VISION 密度静图像
ROBB
1.95
2.95
Coal
0GR
300
不整合
?
X550 ft
X950 ft
解释
来自
ADN
图像
的倾
角真
倾角
幅度
度0
1.95
2.95
1000
-130
0 ft
D层中
稍为
降低
的倾
角
在小断块
上变陡的
层面
东南方向断层
拖拽陡倾角
在H层
中朝
更西方位
摆动
断层面
为断
层岩
石所
限制
?
1765
-181
0 ft
?90
可信度特征
高RO
BB低
TVD 与
MD
剖面解释
0.45
-0.1
5TN
PH
A B C D E ED F G H B D E F G H
VISION密度图像
XX80
0
GR0
300
X100
0
X120
0
X140
0
X160
0
X180
0
X200
0
X220
0
X240
0
X260
0
X280
0
X300
0
基底 B非常小的角度不整合
F
来自VISION图像的倾角
真倾角幅度
可信度特征
deg
090
TNPH
0.46
-0.1
6
10 ftX1450
高密度泥岩
储层单元
E顶部
低密度储层砂岩
构造倾角
测量深度,英尺
地层学
高低
测量深度,英尺
高低
17. Rasmus���� ! 4�
2000�� ! 67
>

�� !"#$%&'()*+,-.
�� !"#$%&'()*+(
��[18] �� !"#$%&'()*+
�� !"#$�� !"#$%��
70��x21�z��� !"#$%&'
�� !"�� !"#$%&'()
�� !"�� !"#$%2500��
x762 �z�� !"#$%&'()*
�� !"#$%&'(�� !"#
�� !"#$%6�� !"#$�
18. Bristow JFW�Real-Time Formation Evaluation forOptimal Decision Making While Drilling-Examples Fromthe Southern North Sea��SPWLA � 41�� !�� !"�� !"#$%&#'2000�6� 5-7 ���� L�
�� !"#$LWD�� !"��� !"#$%&'()*+��
�� !"��VISION�� !"#$�� !"#$%& '()*#+,
�� !"#$%&'()*+,-.
�� �� !"#$%&'()*+
�� !"#$%&'()*+,-�
�� !"#$ %&'(%)* +
��
�� !"#$%&'()*+,
�� !1500��x457�z�� !"#
�� !"#$%�� !"#$%&
���� !"#$%& !'��
�� !"#$%&�'()*+��
�� !"#$INFORM�� !"#�� !"#$%&��� !"���
> �� !"#$%&'(�1�� !"#$�� �!" -2.7��=�� !"#$%&'(�� !�� !"#
实时自然伽马
模拟自然伽马
第1种情况
井眼进入了石炭层?
储层
倾角2.7°
石炭层
�����68

==�2�� !"#�� �!"# 0.75��=��
�� !"#$
实时自然伽马
模拟自然伽马
第2种情况接近储层上部
==�3�� !"#�� �!" -1��=�� !�� !"#$%&'�� 2�� 3�� !�� !"#$%&3.5��==�� !"#$%&�� 实时自然伽马
模拟自然伽马
第3种情况连续与地层面平行
2000�� ! 69
>
>

�� !"#$%&'�� !"
�� !"#$%�� !"#$%&
�� !"#$%&'(�����
�� !"#$%&'()*+,
�� !"#$%&�� !"#$%
�� !"#$%&'()*+,-.
�� !"#$%&'()*+��
�� !"#$%&!'(�� !"
�� !"#$�����
�� !"#$%&'()*+,
�� !"#�� !"#$%&'(
�� !"#$%&'%()*+,�
�� !"#$%&'()*+��
�� 4275�4350�� !20�J=30��� �� !"#$%&'()*+
�� �� !"#$%&'()*
��
�� !"#$%&'()*+
�� �!"#$%&'(��
�� !"#$%&'()*�� !
�� !"#$%&'()*+,-.
�� !�� !"#$%&'()
LWD��� !"#$�%&'()LWD��� !"#�� !"#
�� !�"#$�� !"#$%&
�� !"!#$%&�� !"#$
�� �� !"# $%&'��
LWD�� !"#$%&'()*+�� !"#$%&'()*+,-.
�� !"#$%&'()*+��
�� !
�� !"#�$%&'()*+
���� !"�#$%&�� !"
�� !"#$%&'(�� !"#
�� !"#�� !"#$%#&'
�� !"#$%&'� ()*+,
> �� !" #$%"&'()*+ VISION�� � 1�� !"#$��
�� !"#$%&'()*+�� !"#$%�2�� !"#$%&'()� 3�� !"#�� !"�� !�� !�� �� !�� � 4 ��
�� !"#3850�� !"#$%&'(1��=�� !"# 89��90��
3850
3900
3950
4000
4050
4100
4150
4200
向上序列
中子密度
VISION电阻率
GR
4300
4250
4350
4400
4450
4500
4550
4600
4650
层平行
向上序列
中子
密度
VISION电阻率
GR
高倾
沙丘滑落面
U R B L U深度英尺
层平行
�����70

�� !"#$%&'()*+,��
�� !"#$%&'( )*��
�� !"#$%&�� !"#$%
�� !"#$%&'()*+
�� ! LWD�� !"#$��� !�� !"#$%&'��
�� !�� !"#���� !�
�� !"�#$%&'()*+,-
�� !"#$%&'(
�� !"#$%&'(�� !
�� !"#$%&'()*+,-.
�� !"�� !"#$%&'()
�� �� !"#$%&'()*�
�� !"#$%&'()*+,-.
�� �� !"#$%&'()*+
���� !"#$%&'()��
�� !"#$�%&'()*
�ECD��� !"#$%�� !"#���� !"#$%&'()*+,
���� !"#$%&'()*+,
����� !��
GeoVISION�� !"#$%&'�� !"#$%&'()*+,-.
�� !�� !"#$%&'()*
> �� !"#$%&'()*+,-./0()1�� !"#$%&'()*+,-.�� !
�� !"#$%&'()*+,�-./01
真深度解释 实时自然伽马
模拟自然伽马
2000�� ! 71

�� !"#$%�� �� !"#
�� !"#$%&'()�*� +
�� !"#$�� !"#$%&'
�� !"#$%������� !
�� �� !"#$%�&'()*
���� !"#$%&'()*+
���� !"#$%&'�� !"
�� !"�� !"#$%&'()
�� !"
�� !"#$% !"&�'(
�� !"#$%&�'()*+,-
�� !"#$%�� !"#$%&
�� !"#$%&'()*+,-
���� !"#$%&'()*+,
> GeoVISION�� !"#$�� !"#$%&'()*+,-./0123 LWD�� !"#$������ !"#$%&'()�� !"#$%&'�� !"#$%&'()*+ -X080-X090����� X100-X110 �� -�� !"#$%&'()*#+,-.
X080
X090
X100
X110
X120
R B L R B 2 ohm-m 200
钻井图像测量深度1:140 ft
冲刷后图像 电阻率重叠
LU UUU
> GeoVISION�� !"�� !"�� 1�� ��� 2�� ���
3 ���� !"#$ 56�� !"#$%&�� !E� 1 �F��
�� !"�� !�� !" #$%&'()*+,-./��
�� !"#$%&'()*+,- ./01�� !"#$%
X750
测量
深度
,英
尺
X850
上 下右 左 上
浅
中
深
�����72

�� !"#$%&'()
�� !"#�� !"#$%&
�� !"�� !"#$������
�� !"#$%&'()*�� !
�� !"#$%&'()*+,-.
��
�� !"#$%&'()*+,
�� !"#$%�� !"#$%
APWD�� !"#$%&'()*+�� !"#$%&�� !"#$%
�� !"#$%&'(�� !"#
�� !"##$%&'()*+,,
�� !"#�� !"#$�%&&
�� !"#$%&'()*+,��
�� !"#$%&'()*+�+,
�� !"#$%&'(&)*&+,
�� !�� !"�� !"#$%
�� !"#$%&'()*+,-.
�� !"#$%&'()�� !"
�� !"�#�� !"#$%&'
�� !�� !"#$%�� !"
�� !"#$%�� !"#$��
�� !"#$%&'()*+,��
�� !"#$%&'()*+,-.
�� !"#$%&'()*
�� !"#$% &'()*+
�� !"#$�� !"#$%&�
�� !"#�� !"#$%&'(
�� !"#$%&'()*+,
�� !"#$%&'()*+,
�� !"#$%&�� !"#$%
�� !"#�� !"#$�% !
�� !"#$%&'()*+",-
�� !"#$�� !"#$%&'
�� !"#$%&'(#)*��
�� !"#$%&�� !"#$%
���� !���� !"#$%&
�� !"#$%&'()*+��
�� !"#$%&'()*+,-.
�� !"#$%&'()*+,��
�� !"#$%&
�� !"#$%&GeoVISION�
> �� !"#�� 2�� !"��� 2�� !�� !"#$%&'()*+,-�� !"��1���� !"�� �� !"#$%&'()*�� !"GeoVISION����3���� !"#$%&X750�� !"#$%&'()*+,-./012�� !"�� !"#$%&'(�� !"#$%&'()*+,-./01234
���� !"#$%&'()*+,-.�� !"#$%�� !"#�� !"#
�� !"#$%�� !"#$%&'()*+,-./�01234567�� !
���� !"#$%&'()*+,-./01234
侵入
破裂
U R B电阻率图像浅电阻率
2 2000L U
深电阻率
2 2000
自然伽马
X750
X800
2000�� ! 73

�� !"#$%&'()*+,-
���� 1100��x335�zE��F�
�� !"#$%&'()*+,
�� !"N�� !"#$%&'(
�� �� !"#$%&'()*+
���� !"#$%&'()*+,
������� !"#$%&'()*
�53���16������ !"#$
�� !"#$%&'()*+�(,
�� !"#$%&�� !"#$%
�� �ECD���� !"#$%&'�� !"#$%&'
�� !"# 1 3/4�� !"��
�� X1933�� X2017 ����
�� !�X1880�X1964�� !"#����� !"# 1�� !"#$�� !"�� !"#$%&'()
�� 6�� !"��BHA��� �� !"#$%&'()�� 8��
���� !"� 7�� !"#$%�X1965�� X2017�� �� !"�� !"#�� !"#$%&'(
==�� !"#$%�� !�� !�� !�"
���� !"#$%&'�� !"#$%�� !
�� !"#$%&'(�� !"#$%&'()
�� !"#$�� !"#$%&'()*+,-
�� !�� !"#APWD�� !ECD�� !�� !"�� !"�� !"#$%�&'()
�� !"#$%&'()�� !"#$%&��
�� !"#$%&'�� !"
井涌
井涌
20
16
13 3/8
11 3/4
9 5/8
7 5/8
覆压力梯度,磅/加仑10.00 17.00
电阻率 孔隙压力估计,磅/加仑10.00 17.00
ECD, 磅/加仑10.00 17.00
地震孔隙压力估计,磅/加仑10.00 17.00
> �� !"#$% GeoVISION�� �� !"����� !"#$
�� !"#$%&'��1100�� �� !"#$%&'�� !"�� �� !"# 200�� !����� !"#$%&
X1900
X1950
X2000
1100
英尺层段
测量深度,英尺
X2050
X2100
L L LU R B L U R B
�����74
>

�� �� !"#$%&'()*
���� !"#$%&�� !"#
�� !"#$%�� !"#$%&
�� !"#$%&'
� 1 3/4�� 8��� !"��
�� !"#�� !"#$%��
�� !"#�� !"#$%&'(
�� !"#$%&'()*+,-�
�� 7 3/4�� 8 3/4��� !"#$
�� !"#$%&'()*X1964 ��� X2040�� !"#$%&'( 6�� �� !"#$%�� !"#
�� !"#
�� !"#$%&'(')*+
���� !"#$%&'!()*+
�ECD���� !"#$%&'()*���ECD��� !"#$%&'�
�� !�"#$%&'�� !"#
�ECD��13.5-15.5� /��x1.62-1.86� /�� !z�� !"�� ! 1.5��
�� !"#�� !"#$%&'(
�� !"#$%&'()*+,
�� !"!#$%&'()*+
�� !�� !"#$%&'(��
�� !"#$%&'()*"+,-
�� !"#$%&'()*+,-.
�� !"#$%&'�ECD��� ��� !"#$$%&
�� ! APWD�� !"�#�� �ECD��� �� !"#$
�� !"#$%&'()*+,-.
�� !�� !"#$%&'()*
�� !"#�� !"#$%&'
���� !"#$%&'()*+,
�ECD�� ���� !"#$%&'
�� !"#$%
�� !"#$%&'()*+
���� �� !�"#$%&'(
�� !"#$%&LWD�� !"#�� �� !"#$%&'()*+
�� !"#$GeoVISION�� !"�� !"#$�� !"#$%&'
��
> GeoVISION�� !"#$%&'�� !"#$%&'(�� !�� !"#$�ECD��� !�� !"#$GeoVISION�� !"#$%&'()�� !"�A��� ! "X2017����
�� �� !"#�� !"#$%&'()*�� !"#BHA�� !"#$%&'6�� ��� !"#$%&'()*+,-�B��� !"#$%&'()�� 1�� !" 7�� !�� !"#$ %&'()*+�C���� !"#BHA�� !"#$%&''()*"#+,-�� !"#$%&'()�� !"#$ ECD�� !"#$%&'(�B���C��� !"#$�� !"#$%& ECD�� !"#$%&
15.5X1900
X1950
X2000
X2100
X2050
15.0
14.5
14.0
13.5
等效
循环
密度
,磅
/加
仑
A B
C
0 2 4经过的时间,小时
测量
深度
,英
尺
6 8 10
传感器
钻头
L U R B L
2000�� ! 75

�� !"#$
�� !"#$%&'�()*�
�� !"#$%&'(�� !"#
�� !"#�� !"#$%&'(
�� !"#$%&'()*+,-
��[19]�� !"#$%&'()*+
�� !"#$%&'(�� !"#
�� !"#$%&
�� !"#$%&'��()*
�� !�� !"#�� !��
�� !�� !"�� !"#$%
�� !"#$�� !"#�� !
�� !"#�����
�� !"#$%&'()*��
�� !"#$%&'()*+,-.
�� �� !"#$%&'()*+
�� !"#$%&'()*+,-.
���� !"#$%�� !"#$
�� !"#$%&'�� !"#$
�� !"#$%&'()*+,-.
�� !�� !"#�$%&'��
�� �!"#$%&'()�� !
�� !�� !"#$%&'()*
�� !"#$�%&'()*+,�
�� !"#$%&'()*+),-
��
�� !"#$%&'()*+,
�� !" #$%&�� !"#$
�� !"#$%&'�� !"#!
�� !"#$#%&GeoVISION��
�� VISION � APWD�� !"#$�� !"#$%&'()*�� !
�� !"#$%������� !
�� !"#$%&'()*+#,-
�� �� !"#$%&'�� !
�� !"#$ !%&'$()*+
�� !"#�$%&'()*+,-
�� !"#$�� !"#$%&'
�� !"#$%&'()�� !"
�� !"#$%&'()*+��
�� !"#$%&�� !"#$%
�� !"#$%&'()�� !"
�� !"#$%&'()*+,-.
�� !"#$%&'#$(�� !
�� !"#!$%&�� !"#$
�� !"#$%&'()*+$,-
�� !"
> �� !"#$ !%&'()�� !"#
�� !"#$%&1�� !"#$�vI2��
�� !"#�� !"#$%&'()*+
���� !"#�� !"#E� hF�� !�� E�HF��� !"#$%&'()*+�� !"#$%&'�� !"#�� !"
�� !"#$%�� !"#$%&'� rI��� !"#$%&'()#$�� a��� ���� t���� !"#�$%�&�� !�� !"#$%&�� !"#$%&'()
�� !"#$%&�� !"#$%!&'(
�� !"#$�� !�"#$%&"#'(
��
径向应力
切向(环向)应力
切向(环向)应力
轴向应力
σh σH
σv
σt
σa
σr
> �� !"#$%&'()*+'(,-./�� !"#$%&'()*+,
�� !�� !"#$%&'()%&*+,-./0123�� !"#$�
�� !"#$ 20%�� GeoVISION�� !"#$%&'()* +,"-������� !"#$1�90�� !"#$�� !"#$%&'()*+,-.���� !"#$�� ! 9.5� L�� !"#$%&'( 12.5 �L�� �
�� !"#$%&"#'()*+
剪切破裂泥浆比重低
张性破裂泥浆比重高
σH
σh
应力方向
U R B L U
�����76

�� !"#$%&
�� !"#$%&'()*+,
�� !"#�� !"#$%&'�
�� !"#$%& '()*��
���� !"�� !"#$%&'
VISION�� !"#$%&'()*+�� !"#$%&'()�� !"
�� !"#$%&'(�� !"#
�� !"�� !"#$%&'(�
�� !"#$%&'( )*+
�� !"#$%&'()*+,
���� !"#$��%�� !"
��� !"�X480�X512�� !"X542�X562�� !"�� !"#$�� !"#$%&'()*+��
���
�� !"#�$%&'()*+
�� !"#$%&'()�� !"
�� !"#$%&'()*�� !
BHA�� !"#$%&'()*+,�BHA�� !"�� !"#$�%���� !"�# X512 � X524��
�� !"#$%�� !"#$%&
�� !�� BHA�� !"#$%�� !"#$%&'(�� !"#
�� !� X492 � X502�� !"#�� !"#$%&�� !"#$%
�� !"#$%&'()*+,-.
�� �� !"#$
�� !"#$%&'()*+,
�� !"#$%&�� !"��
�� !"#$%"&'()&*+,
�� !"#$%&�� !"#$%
BHA�� !"#$%�� !"#$�� !"#$%&'(�� !"#
�� VISION475�� !"#$%&'�� !"#$%#&'()*+,-
�� !"#$%ho��� !"#$�� !"#$%&� X502 � X513��� !"#$�� !BHA�� !�� !�� !"#$%&'()*
��
19.Bratton T�Bornemann TI=Li Q Plumb DI=Rasmus J� Krabbe H��Logging-While-Drilling Images forGeomechanical Geological and PetrophysicalInterpretationsI�SPWLA�40�� !"#$%&�� !"#1999�5 � 30� -6�3 ����
JJJ�
> �� !"#$%&'()*+,-.�� !"#$�%&'()�X512�� X542��
���� 2���� !"#�� !"#$%&'()*�� !�� 4���� !"#$
�� �� !"#$%&'()*+�� !"#��4���� !"�� !"#$��
4�� �� !"#$%&'�� !"#$%�� !"X502�� X513�� �� !"BHA�� !"#$�� !"#$%&'#()*+,-./0
X500
X550
测量深度1:200
ft
ADN 密度图像水平比例: 1:11.0井眼方位顶部
用户选择深度段经过均衡后的直方图
密度
g/cm3
R B图像方位
L UU
低 高
ROBU (顶部象限密度)
g/cm3 2.951.95
ROBL (左象限密度)
g/cm3 2.951.95
ROBR (右象限密度)
g/cm3 2.951.95
ROBB (底部象限密度)
g/cm3 2.951.95
GR CDR
API 1000
ARPM测量
cycles/sec 010
钻头尺寸
in. 166
密度井径
in. 7.75-2.25
钻杆旋转
ft/hr 0600
ARPM 钻头
旋转, 钻头深度
旋转, ADN 深度
冲刷
cycles/sec 100
2000�� ! 77

�� !"#$%&'()*+,
�� !"#$%&'(������
�� !"#$%&'"()*+!$
�� !�� !"BHA�� !"#�� !"#$%&'(�� !"#
�� !"#$%&�� !"#$
BHA�� !"#$%&'()*��
�� !"#$%&'(�� !"#
�� !�� !"#$%&'()*
�� !"#$%�� !"#$%&
�� !"#$%&'()*+,-
���� !"#$%&'()*+,
�� !�� !"#$%�&'()
�� !"#$�� !"
�� !
� 1�� !�� !"#$%&�� !"#$%&'()*+,-�
�� !"#$%&'()*+ ",
�� !"#$%"&'()*+
BHA��� !"#$%&'()*+�� !"#$%&'(�� !"
���� !"#$%&'()*+,
��VISION�� !"#$GeoVISION�� !"#$%&'()*
=GeoVISION�� !"#$%&�� RAB�� !"#$%&'(�� �� !"#$ 16 � 10�� �� !"�� !"56�� !"#���� !"#$%&#'()*+
���� ! 50:1��� !"#$%�� !"#$%&'()*+,-.
���� ! 1.5 ���� !"#$
PowerPulse MWD�� !"#$��
�� !"#$% 6�L���� !
�� !"#12�L���� !"#
�� ��VISION�� !"#$%&�� !"#$%&�� !"#$%
�� !"#$%&'()*+,-.
�� !"#$%&'
�� !"#$%&'()*+,
�� !"#$%&'()*+,-.
�� !"#$$%&'()*+,-
�� !"#$%&�� !"#$%
�� !"#$%&'()*+,-!
�� !"#$%&'()*�� !
�� !"#$%"#$&'()*�
= VISION�� !"#$%&'()*+,-11,030�� 12,010�� !"�� !"#$%&'()*+,�� !"#$%&'(�� !"#$%
�� !"BHA�� !"#$%&'()*+,�� !�"#$ %&"�� !"�� !12,010�� !"#$%&'()*+,-./0123�� �� Q�� !"#$�ROBU�ROBL�ROBR�ROBB��� J��
���TNPH��� !"#$%&'()*+
低 高g/cm3
g/cm3
VISION 密度图像水平比例 1:11.0井眼方位顶部
经过均衡后的直方图
图像方位R B L UU
测量深度1:200 ft
API0 150
自然伽马 底部象限体积密度 (ROBB)g/cm3
右象限体积密度 (ROBR)g/cm3
左象限体积密度 (ROBL)g/cm3
顶部象限体积密度 (ROBU)ft3/ft3
中子孔隙度 (TNPH)
11,050
12,000
12,050
�����78
>
�� !"#$%&'()*+�,-
�� !"#$%&'()#*+,-
VISION�� !""#$%& LWD �
�� !"#$%&�� !"#$%
�� !"#$��%&
� SP�� =�F