Embed Size (px)
DESCRIPTION
Automation , book
Citation preview

Chöông 2: Cô sôû lyù thuyeát
Tín hieäu mong muoán d(k) Ngoõ vaøo x(k) Ngoõ ra y(k) - Sai soá e(k) +
Hình 2.8 : Baøi toaùn loïc thích nghi Baøi taäp: 1. Cho moat thí duï veà ñieàu khieån môø. 2. Maùy giaët môø laø heä ñieàu khieån voøng hôû hay heä thoáng ñieàu khieån voøng kín? Coøn veà heä thoáng ñieàu khieån xi maêng môø thì sao? Giaûi thích söï traû lôøi cuûa baïn. 3.Chu U laø taäp caùc soá nguyeân töø 1 ñeán 10, nghóa laø u=1,2,3,..,10. Theá thì taäp môø “nhieàu” coù theå ñöôïc ñònh nghóa nhö sau ( duøng kí hieäu toång) Nhieàu=0,5/3+ 0,8/4 +1/5 +1/6 + 0,8/7 + 0,5/8 Giaûi thích vaø veõ ra haøm thaønh vieân μnhieàu(X). 4. Cho hai taäp môø D vaø F ñöôïc ñònh nghóa: Chuùng ta ñònh nghóa taäp hôïp “xe hôi Vieät nam ôû TP. Hoà Chí Minh” kí hieäu bôûi D, nhö laø taäp môø theo phaàn traêm cuûa caùc phaàn ñöôïc laøm ôû Vieät nam.Cuï theå D ñöôïc ñònh nghóa bôûi haøm thaønh vieân
)()( xpxD =μ (1) Trong ñoù p(x) laø phaàn traêm cuûa caùc phaàn cuûa xe x ñöôïc laøm ôû Vieät nam, noù laáy giaù trò töø 0% ñeán 100%. Thí duï, neáu moat xe cuï theå x0 coù 60% cuûa caùc phaàn ñöôïc laøm ôû Vieät nam, thì chuùng ta noùi raèng x0 thuoäc veà taäp môø D vôùi baäc 0,6. Töông töï, chuùng ta ñònh nghóa taäp “xe hôi khoâng phaûi cuûa Vieät nam ôû Tp.Hoà Chí Minh”, kí hieäu bôûi F, nhö laø taäp môø vôùi haøm thaønh vieân
)(1)( xpxF −=μ Trong ñoù p(x) gioáng nhö (1). Vì vaäy , neáu moat xe cuï theå x0 coù 60% cuûa caùc phaàn ñöôïc laøm ôû Vieät nam, thì chuùng ta noùi raèng x0 thuoäc veà taäp môø F vôùi caáp ñoä 1-0,6=0,4.
a) Veõ haøm thaønh vieân )(xDμ , )(xFμ . b) Tính )(xFμ , )(xDF∪μ , )(xDF∩μ , veõ ñoà thò töông öùng.
5. Trình baøy luaät hôïp thaønh max-min vaø luaät hôïp thaønh max-prod. 6.Trình baøy caùc phöông phaùp giaûi môø.
Boä loïc
Giaûi thuaät thích nghi

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
153
7. Trình boä ñieàu khieån môø Mamdani vaø boä ñieàu khieån môø Takagi-Sugeno. 8. Thieát keá boä ñieàu khieån môø cho ñieàu khieån nhieät ñoä. 9. Ñieàu khieån môø heä con laéc ngöôïc treân xe. 10. Ñieàu khieån ñoäng cô baèng môø. 11.Tìm hieåu chöông trình slcp (ñieàu khieån môø heä co laéc ngöôïc treân xe)trongMatlab 12. Maïng nôron (neuron) laø gì. Maïng nôron truyeàn thaúng vaø maïng hoài quy. 13. Maïng truyeàn thaúng perceptron nhieàu lôùp vôùi giaûi thuaät hoïc lan truyeàn ngöôïc 14. Maïng haøm cô sôû xuyeân taâm RBF. 15. Neâu caùc öùng duïng cuûa maïng nôron. 16. Cho moät ñoái töôïng loø nhieät coù haøm truyeàn
)456,864,1)(5,0(228,4)( 2 +++
=sss
sG
a) Tính thoâng soá boä PID theo Ziegler-Nichols, tính POT, txl. b)Thieát keá boä PID môø thoûa maõn caùc ñieàu kieän sau:POT<10% vaø txl< 5s. Bieát raèng: -Nhieät ñoä ñaët Ts=200 0C. -Sai soá emax=±5% - ]1010[ +−∈DET (0C/s). -Coâng suaát loø nhieät P=5 kW. TìmKp,Ki, Kd vaø tính coâng suaát trong caùc tröôøng hôïp: 1.ET=8 0C DET=9 0C/s. 2.ET=2 0C DET=2 0C/s 3.ET=8 0C DET=-9 0C/s. 17.Cho baøi toaùn phaân loaïi vôùi caùc caëp vaøo/ ra nhö sau:
⎭⎬⎫
⎩⎨⎧
=⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
=⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
=⎥⎦
⎤⎢⎣
⎡−
=⎭⎬⎫
⎩⎨⎧
=⎥⎦
⎤⎢⎣
⎡=
⎭⎬⎫
⎩⎨⎧
=⎥⎦
⎤⎢⎣
⎡−=
0,10
,0,01
,1,1
1,1,
00
,1,11
5544
332211
tptp
tptptp
a)Veõ sô ñoà maïng perceptron cho baøi toaùn.Coù bao nhieâu ngoõ vaøo yeâu caàu? b) Bieãu dieãn caùc caëp ngoõ vaøo/ra treân ñoà thò. Baøi naøy coù theå giaûi baèng sô ñoà maïng vöøa thieát keá ôû treân khoâng?Taïi sao?

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
154
Chöông 5: Caùc ÖÙng duïng: 5.1. Ñieàu khieån thích nghi töï chænh duøng phöông phaùp ñaët cöïc ñeå ñieàu khieån loø nhieät. 5.1.1.Thiết kế phần cứng Sơ đồ khối phần cứng:
Hình 5.1: Sơ đồ khối phần cứng Sơ đồ nguyên lý mạch giao tiếp:
PC
VDK P89V51RD2
Mạch ADC Mạch công suất
AC110V
Cảm biến nhiệt độ
Điện trở đốt nóng
MAX232

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
155
Hình 5.2: Sơ đồ nguyên lý mạch giao tiếp máy tính
Vi điều khiển P89V51RD2:
Phần cơ sở lý thuyết đã trình bày về vi điều khiển P89V51RD2. Ở đây chỉ xin nói thêm về chức năng của IC này.
Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
156
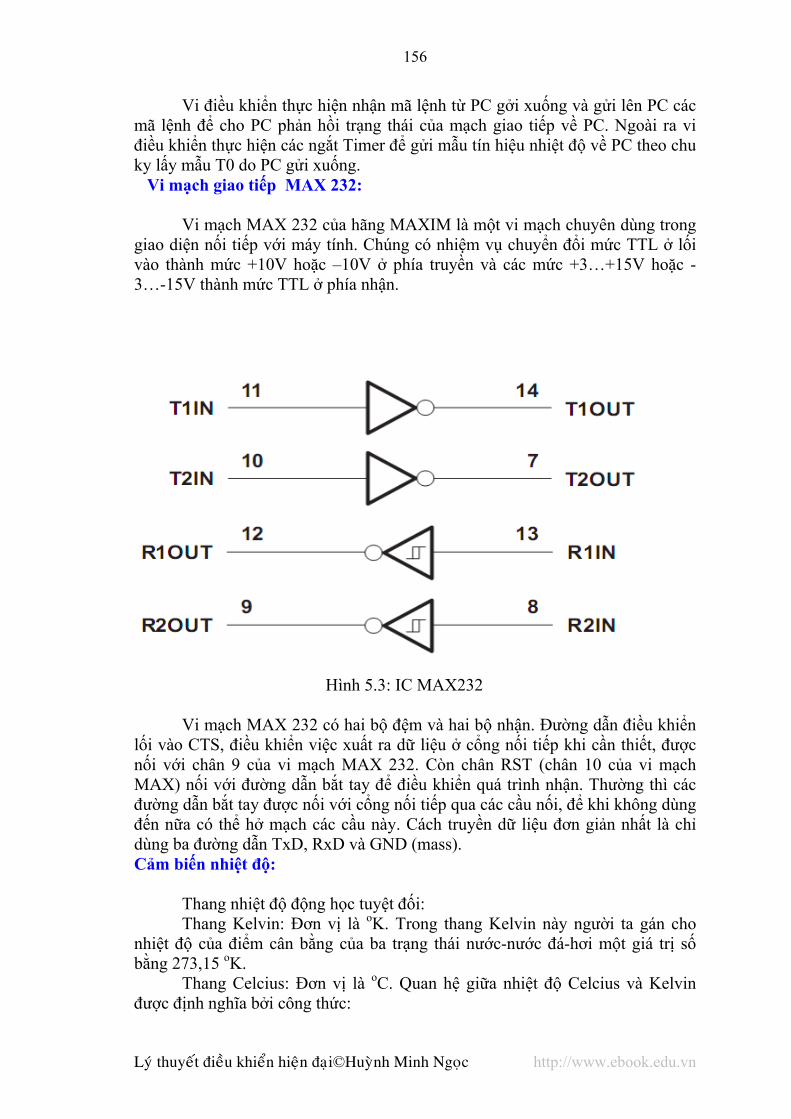
Vi điều khiển thực hiện nhận mã lệnh từ PC gởi xuống và gửi lên PC các mã lệnh để cho PC phản hồi trạng thái của mạch giao tiếp về PC. Ngoài ra vi điều khiển thực hiện các ngắt Timer để gửi mẫu tín hiệu nhiệt độ về PC theo chu ky lấy mẫu T0 do PC gửi xuống. Vi mạch giao tiếp MAX 232:
Vi mạch MAX 232 của hãng MAXIM là một vi mạch chuyên dùng trong giao diện nối tiếp với máy tính. Chúng có nhiệm vụ chuyển đổi mức TTL ở lối vào thành mức +10V hoặc –10V ở phía truyền và các mức +3…+15V hoặc -3…-15V thành mức TTL ở phía nhận.
Hình 5.3: IC MAX232
Vi mạch MAX 232 có hai bộ đệm và hai bộ nhận. Đường dẫn điều khiển lối vào CTS, điều khiển việc xuất ra dữ liệu ở cổng nối tiếp khi cần thiết, được nối với chân 9 của vi mạch MAX 232. Còn chân RST (chân 10 của vi mạch MAX) nối với đường dẫn bắt tay để điều khiển quá trình nhận. Thường thì các đường dẫn bắt tay được nối với cổng nối tiếp qua các cầu nối, để khi không dùng đến nữa có thể hở mạch các cầu này. Cách truyền dữ liệu đơn giản nhất là chỉ dùng ba đường dẫn TxD, RxD và GND (mass). Cảm biến nhiệt độ:
Thang nhiệt độ động học tuyệt đối: Thang Kelvin: Đơn vị là oK. Trong thang Kelvin này người ta gán cho nhiệt độ của điểm cân bằng của ba trạng thái nước-nước đá-hơi một giá trị số bằng 273,15 oK. Thang Celcius: Đơn vị là oC. Quan hệ giữa nhiệt độ Celcius và Kelvin được định nghĩa bởi công thức:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
157
T(oC)=T(oK)-273,15 Thang Fahrenheit: Đơn vị là oF T(oC)=T(oF)-32*5/9 T(oF)=T(oC)*9/5 +32 Các phương pháp đo nhiệt độ: Nhiệt độ là một đại lượng không điện, đo nhiệt độ được chia thành nhiều dãi: đo nhiệt độ thấp, đo nhiệt độ trung bình và đo nhiệt độ cao. Việc đo nhiệt độ được tiến hành nhờ các dụng cụ chuyên biệt như: nhiệt điện trở bán dẫn, nhiệt điện trở kim loại, cảm biến thạch anh, cặp nhiệt điện hoặc nhiệt điện kế kim loại. Việc sử dụng các IC cảm biến nhiệt để đo nhiệt độ là một phương pháp thông dụng được sử dụng trong bài báo cáo đồ án này, nên ở đây chỉ giới thiệu về IC cảm biến nhiệt. Cảm biến LM35: LM35 là IC cảm biến nhiệt độ có độ chính xác cao, 10mV/oC. Ở 25oC nó có sai số là không quá 1%. Với tầm đo từ -55oC – 150oC, tín hiệu ngõ ra tuyến tính liên tục với những thay đổi nhiệt độ ở ngõ vào. Thông số kỹ thuật: LM35 có độ biến thiên theo nhiệt độ: 10mV/1oC. Độ chính xác cao, tính năng cảm biến nhiệt độ rất nhạy, ở nhiệt độ 25oC nó có sai số khộng quá 1%. Tầm đo từ -55oC – 150oC, tín hiệu ngõ ra tuyến tính liên tục với những thay đổi của tín hiệu ngõ vào. Thông số kỹ thuật:
Ngõ ra điện áp. Độ nhạy là 10 mV/1oC. Phạm vi hoạt động: -55oC – 150oC. Ở nhiệt độ 25oC sai số không quá 1%. Áp làm việc từ 4 – 30 V.
Đặc tính điện:
Theo thông số của nhà sản xuất LM35, quan hệ giữa nhiệt độ và điện áp ra như sau:
Vout = 0,01*ToC Vậy ứng với tầm hoạt động từ 0oC – 100oC ta có sự biến
thiên điện áp ngõ ra là: Ở 0oC thì Vout = 0V Ở 5oC thì Vout = 0.05V Ở 100oC thì Vout = 1V
Khối biến đổi ADC (IC ADC0809):

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
158
ADC0809 là IC để chuyển đổi tương tự sang số dùng kỹ thuật CMOS bao gồm tám kênh làm việc độc lập với nhau để lựa chọn đầu vào từ IN0 – IN7 và giá trị nhiệt độ sẽ được xuất ra dưới dạng 8 nhị phân 8 bit D0 – D7.
Hình 5.4: IC ADC0809
Sơ đồ chân: IN0 – IN7: 8 ngõ vào tương tự. A0 – A2: giải mã chọn một trong 8 ngõ vào. D0 – D8: ngõ ra song song 8 bit. ALE: cho phép chốt địa chỉ. START: xung bắt đầu chuyển đổi. CLK: xung đồng hồ cho IC hoạt động. REF(+): điện thế tham chiếu (+). REF(-): điện thế tham chiếu (-). VCC: nguồn cung cấp. EOC: báo kết thúc chuyển đổi. OE: cho phép đọc dữ liệu sau chuyển đổi. GND: chân nối đất.
Nguyên lý hoạt động: Kích hoạt chân ALE (Address Latch Enable) cho phép chốt địa chỉ. Cần cấp một xung thấp lên cao để chốt địa chỉ. Sau khi kích xung START thì bộ chuyển đổi bắt đầu hoạt động ở cạnh xuống của xung START, ngõ ra EOC (End Of Conversion) sẽ xuống mức thấp sau khoảng 8 xung clock tính từ cạnh xuống cảu xung START. Lúc này bít có trọng số lớn nhất (MSB) được đặt lên mức 1, tất cả các bit còn lại xuống mức 0,

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
159
đồng thời tạo giá trị điện thế Vref/2, điện thế này được so sánh với điện thế vào Vin. Nếu Vin>Vref/2 thì bit MSB vẫn ở mức 1.
Nếu Vin<Vref/2 thì bit MSB xuống mức 1. Tương tự như vậy bit kế tiếp MSB được đặt lên 1 và tạo ra điện thế có giá
trị Vref/4 và cũng so sánh với điện áp ngõ vào Vin. Quá trình cứ tiếp tục cho đến khi xác định được bit cuối cùng. Khi đó chân EOC lên mức 1 báo cho biết quá trình chuyển đổi đã hoàn tất. Để đọc được dữ liệu thì set bit OE (Output Enable) lên mức 1. Trong quá trình chuyển đổi khi có xung START tác động thì ADC sẽ ngưng chuyển đổi.
Các bit A2A1A0 để định địa chỉ cổng vào tương tự theo bảng sau:
A2 A1 A0 Ngõ vào được
chọn 0 0 0 IN1 0 0 1 IN2 0 1 0 IN3 0 1 1 IN4 1 0 0 IN5 1 0 1 IN6 1 1 0 IN7 1 1 1 IN8
Bảng 5.1: Ngõ vào analog tương ứng với giá trị ÀA1A0
Mạch cấp xung đồng hồ cho ADC0809:
Hình 5.5: Mạch dao động cấp xung đồng hồ cho ADC0809
Trong ADC0809 không có đồng hồ riêng và do vậy phải cấp xung đồng bộ ngoài đến chân CLK. Mặc dù tốc độ chuyển đổi phụ thuộc vào tần số xung đồng hồ được nối đến CLK nhưng nó không nhanh hơn 100ms. Tần số dao động của mạch: f = 0,7/(R*C)

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
160
Độ phân giải của ADC0809 là: ( )
( ) ( )
256*( )N in ref
ref ref
V VV V
−
+ −
−=
−
Nếu lấy chân Vref(+) = 5V, chân Vref(-) =0V thì độ phân giải của ADC0809 là 0,0196 V/byte.
Mạch công suất:
Opto-triac MOC3020: Để tạo vùng cách ly giữa hệ thống điều khiển và mạch công suất.
Triac BT136: Mạch công suất dùng BT136 để kích thay đổi nhiệt độ của lò.
BT136 có thể chịu được dòng điện từ 4-25A, còn MOC3020 có thể chịu được điện áp tới 400V nhưng dòng chỉ được 1,2A nên phải dùng thêm BT136 để có thể điều khiển được tải có công suất lớn.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
161
5.1.2.Lưu đồ giải thuật
5.1.2.1 Lưu đồ giải thuật chương trình cho vi điều khiển:
Hình 8.10: Trạng thái ban đầu của VDK hoặc khi được RESET
Hình 5.6: Chương trình phục vụ ngắt Timer0 của VDK
- Ngắt port nối tiếp tích cực. - Khởi tạo giá trị cho TH0 & TL0, Timer1
(baudrate là 9600) và port nối tiếp. - Khởi tạo PCA cho chế độ điều rộng xung. - Trạng thái lò nhiệt State=OFF.
START
Có ngắt T0
- ALE tích cực - START tích cực - OE tích cực - Chờ EOC lên mức tích cực hoàn tất chuyển đổi ADC
Điều khiển chân ALE, START và OE trở về không tích cực
Gửi giá trị nhiệt độ dạng nhị phân lên PC

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
162
Hình 5.7: Lưu đồ chương trình phục vụ ngắt port nối tiếp của VDK 5.1.2.2.Lưu đồ giải thuật chương trình Matlab:
Các mã được dùng để giao tiếp PC với VDK: Mã #255: Mã kiểm tra kết nối. Mã #254: Mã vận hành. Mã #254: Mã ngừng vận hành.
SBUF = #253 STOP
- Ngắt Timer0 không tích cực. - STATE = 0. - Gửi mã #253 lên PC
Đ
S
Đ
Đ
S
S
- Ngắt Timer0 tích cực. - Trạng thái lò nhiệt State=ON.
State=ON CCAP4H=SBUF
Có ngắt port nối tiếp
SBUF = #255 LINK
SBUF = #254 RUN
Gửi mã #255 lên PC
SBUF=252 SAMPLE
SAMPLE=1
- SAMPLE = 1. - Gửi mã #252 lên PC.
- Nhận T0 do PC gửi xuống. - Gửi mã #251 lên PC. - SAMPLE=0.
END
Đ
Đ
Đ
S
S
S

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
163
Mã #252: Mã thiết lập trạng thái sẵn sàng cho VDK để nhận thời gian lấy mẫu từ PC gửi xuống.
Mã #251: Mã xác nhận rằng VDK đã nhận thời gian lấy mẫu.
Hình 5.8: Trạng thái ban đầu khi mở giao diện chạy thực
Mở cửa sổ giao diện chạy thực
- Các nút LINK, HELP và CLOSE sáng.
- Nút START, STOP mờ. - Tất cả các điều khiển trong phần cài
đặt thông số đều được cho phép.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
164
Nhập thông số vào giao diện
Nhấn nút START
- Nạp vào các thông số cố định cho bộ điều khiển. - Gửi mã #252 xuống VDK.
Xảy ra sự kiện TimerFcn
Hủy sự kiện TimerFcn
Nhận được mã #252
Thông báo “KHÔNG THỂ KẾT NỐI PC VÀ VDK”
Gửi giá trị thời gian lấy mẫu
Khởi tạo sự kiện TimerFcn
Đ
Đ S
S

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
165
Hình 5.9: Trạng thái khi nhấn nút VẬN HÀNH
Xảy ra sự kiện TimerFcn
Nhận được mã #251
Khởi tạo sự kiện TimerFcn
Hủy sự kiện TimerFcn
Gửi mã #254
Thông báo “KHÔNG THỂ KẾT NỐI PC VÀ VDK”
Hiện thông báo “HỆ THỐNG LÒ NHIỆT ĐANG VẬN HÀNH”
- Làm mờ nút START. - Làm sáng nút STOP.
Đ
Đ S
S

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
166
Hình 5.10: Sự kiện BytesAvailable
Xảy ra sự kiện ByteAvailableFcn
Nhận nhiệt độ yk do VDK gửi lên đưa vào
Cập nhật giá trị Nhiệt độ đặt wk được nhập từ giao diện
Nhận dạng tham số đối tượng: tính Theta và ma trận C
Thiết kế bộ điều khiển: tính P, Q, R
Tính toán tín hiệu điều khiển uk
Gửi giá trị uk xuống VDK
Đưa giá trị uk, yk, wk lên đồ thị

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
167
Hình 5.11: Trạng thái khi nhấn nút KIỂM TRA KẾT NỐI
Nhấn LINK
Mở cổng COM
Gửi mã #255
Khởi tạo sự kiện TimerFcn
Xảy ra sự kiện TimerFcn
Hủy sự kiện TimerFcn
Nhận được mã #255
- Hiện thông báo “KẾT NỐI THÀNH CÔNG”.
- Làm mờ nút LINK, làm sáng nút START.
Thông báo “KHÔNG THỂ KẾT NỐI PC VÀ VDK”
Đ S
SĐ

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
168
Hinh 5.12: Trạng thái khi nhấn nút NGỪNG
Nhấn STOP
Hủy sự kiện ByteAvailableFcn
Gửi mã #253
Thiết lập sự kiện TimerFcn
Xảy ra sự kiện TimerFcn
Hủy sự kiện TimerFcn
Nhận được mã #253
Thông báo “KHÔNG THỂ KẾT NỐI PC VÀ VDK”
Đóng cổng COM
Thông báo “HỆ THỐNG LÒ NHIỆT ĐÃ NGƯNG VẬN HÀNH HÀNH”
- Làm sáng nút LINK. - Làm mờ nút STOP.
Đ
Đ
S
S
Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
169
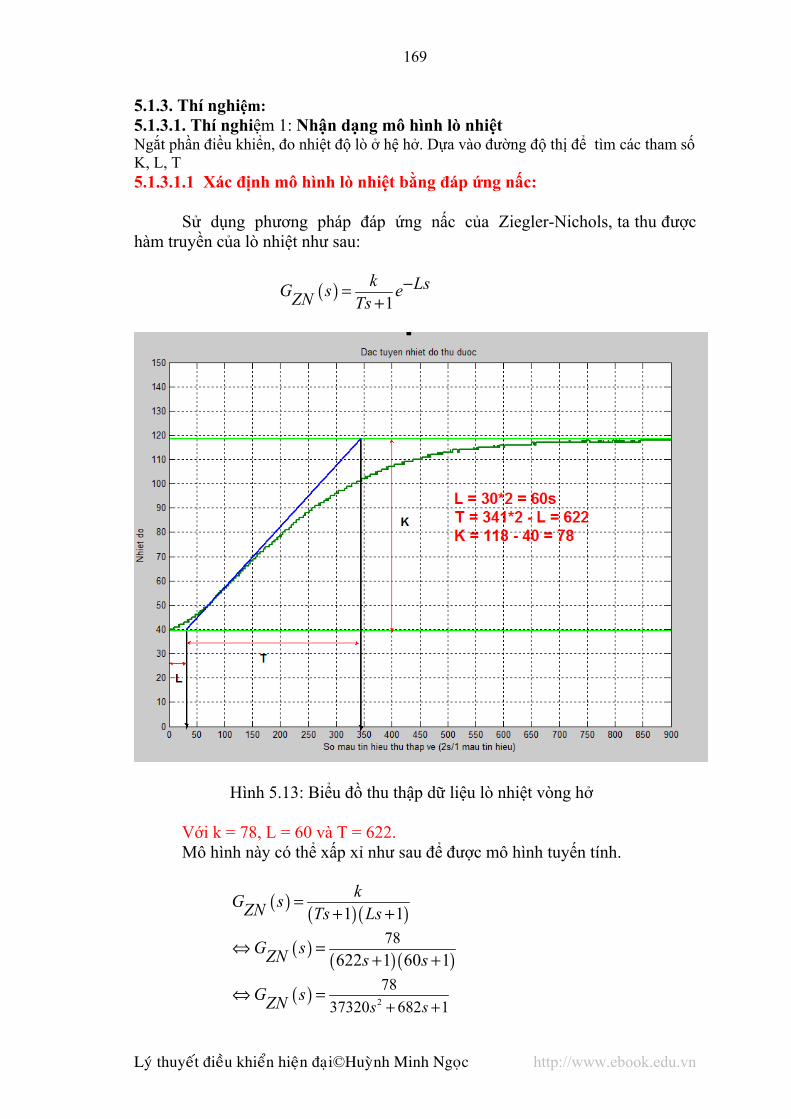
5.1.3. Thí nghiệm: 5.1.3.1. Thí nghiệm 1: Nhận dạng mô hình lò nhiệt Ngắt phần điều khiển, đo nhiệt độ lò ở hệ hở. Dựa vào đường độ thị để tìm các tham số K, L, T 5.1.3.1.1 Xác định mô hình lò nhiệt bằng đáp ứng nấc:
Sử dụng phương pháp đáp ứng nấc của Ziegler-Nichols, ta thu được
hàm truyền của lò nhiệt như sau:
( ) 1k LsG s eZN Ts
−=+
Hình 5.13: Biểu đồ thu thập dữ liệu lò nhiệt vòng hở
Với k = 78, L = 60 và T = 622. Mô hình này có thể xấp xỉ như sau để được mô hình tuyến tính.
( ) ( )( )1 1kG sZN Ts Ls
=+ +
( ) ( )( )78
622 1 60 1G sZN s s
⇔ =+ +
( ) 2
7837320 682 1s s
G sZN + +⇔ =

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
170
Tóm tắt:
Trong phần này, mô hình lò nhiệt được nhận dạng. Mô hình này sẽ được dùng để mô phỏng sự hoạt động của bộ điều khiển. 5.1.3.2. Thí nghiệm 2 Mục đích : 1/sinh viên tiến hành mô phỏng bộ điều khiển tự chỉnh và PID số 2/ sinh viên tiến hành chạy thực bộ điều khiển tự chỉnh và PID số. SInh viên xây dựng giao diện như sau dùng Matlab: Giao diện người dùng:
Hình 5.14: Giao diện chính 5.1.3.2.1 Kết quả mô phỏng: 5.1.3.2.1.1 Bộ điều khiển tự chỉnh STR:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
171
Hình 5.15: Giao diện mô phỏng bộ STR
Hình 5.16: Sơ đồ khối bộ điều khiển lò nhiệt STR trong Simulink
Hình 5.17: Sơ đồ kết nối các khối bên trong của khối adaptive pp3c2dof Tiến hành mô phỏng:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
172
Hình 5.18: Mô phỏng bộ điều khiển STR
5.1.3.2.1.2 Bộ điều khiển PID số:
Hình 5.19: Giao diện mô phỏng bộ PID

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
173
Hình 5.20: Sơ đồ khối bộ điều khiển lò nhiệt PID trong simulink Tiến hành mô phỏng:
Tiến hành nhập các thông số theo Zeigler-Nichols:
Hình 5.21: Kết quả mô phỏng bộ điều khiển PID theo Zeigler - Nichols Nhập các thông số đã được điều chỉnh:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
174
Hình 5.22: Kết quả mô phỏng bộ điều khiển PID sau khi đã thử sai nhiều lần 5.1.3.2.2 Kết quả chạy thực: 5.1.3.2.2.1Bộ điều khiển tự chỉnh STR:
Hình 5.23: Giao diện chạy thực bộ STR Tiến hành chạy thực:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
175
Hình 5.24: Một kết quả khi chạy thực bộ STR
Hình 5.25: Một kết quả khác khi chạy thực bộ STR

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
176
Hình 5.26: Kết quả quá trình ước lương tham số
Hình 5.27: Kết quả quá trình ước lượng tham số (phóng lớn) 5.1.3.2.2.2 Bộ điều khiển PID số:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
177
Hình 5.28: Giao diện chạy thực bộ PID Tiến hành chạy thực:
Kết quả chạy thực với các thông số nhập vào theo công thức của Zeigler – Nichols. Với kp = 0,16; ki = 0,0013; kd = 4,8.
Hình 5.29: Kết quả chạy thực theo Zeigler – Nichols Kết quả chạy thực với kp = 0,16; ki = 0; kd=10.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
178
Hình 5.30: Kết quả chạy thực với các tham số đã được chọn lọc trong quá trình thử sai nhiều lần.
5.1.3.2.2.3. Kết luận:
Kết quả mô phỏng cũng như chạy thực cho thấy bộ điều khiển tự chỉnh STR vận hành tốt, độ vọt lố và sai số rất ít khi đã vào trạng thái xác lập. Tuy nhiên, nếu trong thời gian lên xuất hiện nhiễu quá nhiều, mất nhận dạng có thể xảy ra làm cho đặc tuyến nhiệt độ không được như mong muốn.
Kết quả mô phỏng cũng như chạy thực với bộ điều khiển PID với những tham số kp-ki-kd theo Zeigler - Nichols cho kết quả rất không như mong muốn. Tuy nhiên khi tiến hành thử sai và chỉnh sửa lại nhiều lần để chọn lựa bộ thông số kp-ki-kd thích hợp, bộ điều khiển PID cũng cho kết quả tốt và trong thời gian lên nếu xuất hiện nhiễu nhiều thì cũng không bị ảnh hưởng nhiều. Tham khảo: Nguyễn Hưng Thịnh, Thiết kế và thi công bộ điều khiển tự chỉnh dung đặt cực để điều khiển lò nhiệt, đồ án tốt nghiệp, lớp ĐHĐT4ALT, tháng 5-2010. 5.2. Ñieàu khieån môø nhieät ñoä loø ñieän.
THIẾT KẾ VÀ THI CÔNG BỘ ĐIỀU KHIỂN MỜ NHIỆT ĐỘ LÒ ĐIỆN
5.2.1.THIẾT KẾ PHẦN CỨNG
5.2.1.1.Phân tích :

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
179
Yêu cầu đặt ra là thiết kế một bộ điều khiển hoạt động dựa trên cơ sở logic mờ để điều khiển nhiệt độ cho một lò nhiệt. Để thực hiện được những vấn đề trên thì hệ thống cần có những khối sau: + Khối cảm biến nhiệt: dùng để đo nhiệt độ hiện tại trong lò
+ Khối khuếch đại và biến đổi A/D: có nhiệm vụ khuếch đại tín hiệu từ cảm biến nhiệt và số hóa tín hiệu để đưa vào bộ vi điều khiển
+ Khối hiển thị: có nhiệm vụ hiển thị nhiêt độ trong lò và nhiệt độ cài đặt + Khối nút nhấn: có nhiệm vụ nhập nhiệt độ cần cài đặt
+ Khối vi điều khiển: thực hiện các chức năng mờ hóa, hợp thành, giải mờ và điều khiển các khối khác hoạt động
+ Khối công suất: có nhiệm vụ điều khiển việc cấp nguồn động lực cho lò nhiệt Từ những phân tích trên ta có sơ đồ khối của hệ thống như sau
5.2.1.2. Thiết Kế Mạch
5.2.1.2.1.Khối Cảm Biến Nhiệt
Với giải nhiệt độ từ 300C đến 1000C, ta chọn cảm biến nhiệt độ bán dẫn thông thường là LM35. Lm35 có nhiệt độ ngõ ra tỷ lệ trực tiếp với thang đo nhiệt độ bách phân. Điện áp ngõ ra là 10mv/0C. Sai số đo không tuyến tính là ± 1.8mv cho toàn thang đo. Điện áp cấp có thể thay đổi từ 4 – 30 V. Lm35 được chế tạo cho 3 thang đo:-550c … +1500c (LM35/35A); - 400c… +1100c (LM35C/CA) và 00c …1000c( LM 35D)
Tải điện dung của lm35 có trị số lớn nhất là 50 pf. Thì trị số của dây đo vượt quá trị số này ở ngõ ra của LM35 cần mắc 1 mạch RC 10Ω/1pf . Điều này là cần thiết khi dây đo giữa cảm biến và bộ biến đổi ADC khá dài. Sơ đồ chân của cảm biến nhiệt LM35

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
180
Sơ đồ mạch khối cảm biến nhiệt được cho như hình dước
Ngõ ra chân số 2 của LM35 được đưa tới khối khuếch đại 5.2.1.2.2. Khối Khuếch Đại
Tín hiệu đưa ra từ cảm biến nhiệt LM35 rất nhỏ cần phải đưa qua một mạch khuếch đại đủ lớn để đưa vào bộ biến đổi A/D. với cảm biến nhiệt LM35 thì ngõ ra tăng 10mv/0C. trong khi đó với ADC 8 bit, Vcc = 5V, để ngõ ra tăng 1 giá trị thì ngõ vào phải tăng một khoảng là
5 0,02 20255
mv≈ =
do đó cần thiết kế một mạch khuếch đại có hệ số khuếch đại: Av = 20mv/10mv = 2. với mạch khuếch đại này ta sử dụng opamp 741 thông dụng. Mạch khuếch đại dùng opamp có sơ đồ như sau
Hệ số khuếch đại của mạch được tính như sau:
1 21
R RAvR+=
Để hệ số khuếch đại là 2 ta chọn các điện trở R1 = R2 = 10k 5.2.1.2.3. Bộ biến Đổi A/D.
Tín hiệu sau khi được khuếch đại được đưa vào bộ biến đổi tương tự sang số A/D:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
181
Mạch biến đổi A/D có nhiệm vụ biến đổi điện áp tương tự thàng tín hiếu số để gửi vào vi điều khiển. Vì nhiệt độ là một đại lượng biến đổi chậm nên ta chọn vi mạch A/D thông dụng trên thị trường hiện nay là ADC0804. Các đặc tính của ADC0804 như sau: - đầu ra được đệm bằng các cổng 3 trạng thái nên có thể ghép trực tiếp vào bus dữ
liệu mà không cần mạch đệm dữ liệu ở bên ngoài; - thời gian biến đổi khoảng 100ms/mẫu; - khi điện áp đầu vào là 5v thì đầu ra cực đại là 1111 1111 ; - dòng tiêu thụ nhỏ cỡ 1,9mA sơ đồ mạch kết nối ADC0804 được cho như hình dưới:
Để điều khiển ADC hoạt động ta điều khiển các chân CS, RD, RW, chân INTR là chân ngõ ra của ADC. Các chân trên được nối như sau: - Chân CS( chân số 1) là chân chọn chíp hay chân điều khiển phép ADC hoạt động hay không hoạt động, tín hiệu điều khiển CS là tín hiệu tích cực mức thấp, khi CS = 0 ADC được phép hoạt động, CS = 1 ADC không hoạt động. Chân CS của ADC được nối với chân CS2 của IC giải mã địa chỉ 74LS138 - Chân WR có tiêu chuẩn mức điện áp logic TTL. Tín hiệu vào mức cao tới mức thấp cho phép ADC bắt đầu biến đổi. Chân này được nối với chân WR của vi điều khiển. - Chân RD là tín hiệu đọc số liệu, sau khi ADC biến đổi xong vi điều khiển thực hiện việc đọc số liệu bằng cách chuyển tín hiệu RD của ADC xuống mức thấp. - Bus dữ liệu (DB0 –DB7) ADC truyền dữ liệu với vi điều khiển thông qua 8 chân dữ liệu. khi chân RD mưc thấp lúc này các cổng đệm 3 trạng thái ở đàu ra mở cho phép vi điều khiển nhập dữ liệu từ ADC thông qua bus dữ liệu. 5.2.1.2.4. Vi Mạch Mở Rộng Vào Ra (8255A):
Các chân I/O của vi diều khiển không đủ kết nối với các thành phần trong mạch do đó cần một vi mạch mở rộng vào ra. Một vi mạch mở rộng vào ra được sử dụng nhiều

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
182
là 8255A. Vi mạch này có 24 chân cho thiết bị I/O có thể lập trình hoạt động trong 3 mode khác nhau .8255A-5 có thể nối ghép bất kỳ thiết bị vào ra kiểu TTL và tương thích với 8051. 8255A thường được sử dụng để ghép nối với bàn phím và cổng máy in song song trong các máy PC. Ba cổng vào ra của nó được lập trình thành các nhóm 12 chân. Nhóm A bao gồm cổng A ( PA7 - PA0 ) và nửa cao của cổng C (PC7 - PC4 ), nhóm B bao gồm cổng B (PB7 - PB0 ) và nửa thấp của cổng C ( PC3 - PC0 ). Hai chân A1, A0 chọn thanh ghi nội để lập trình hoặc hoạt động. hai chân này được nối với hai chân A0, A1 của IC giải đa hợp 74HC573. Ðể 8255A-5 có thể đọc ghi thì chân CS phải ở mức logic 0 và địa chỉ I/O phải được nối với chân A1 và A0
0 0 Cổng A
A1 A2 Chức năng
0 1 Cổng B
1 0 Cổng C
1 1 Thanh ghi lệnh
Khi tín hiệu RESET bằng 1 tất cả các cổng được đưa về trạng thái là các cổng vào
(Input port) nghĩa là tất cả 24 đường của ba cổng đều ở trạng thái trở kháng cao ). Sau khi tín hiệu RESET bằng 0 thì 8255 có thể duy trì trạng thái trên nếu như không có sự thiết lập trạng thái bổ xung nào nữa, do đó trong mạch chân RESET được nối xuống mát.
Các chế độ của cổng A và cổng B có thể được định nghĩa một cách riêng biệt, trong khi đó cổng C được chia thành hai phần vì lý do các định cho cổng A và cổng B . Tất cả các thanh ghi nội và thông tin trạng thái sẽ được xoá khi chế độ thay đổi. Nhóm B ( Group B) có thể được lập trình ở mode 0 để điều khiển các chuyển mạch đơn giản hoặc hiển thị các kết quả tính toán. Nhóm A có thể được lập trình hoạt động trong mode1 để điều khiển bàn phím hoặc bộ đọc băng từ hoặc một bộ điều khiển ngắt cơ bản.
Chức năng xoá bit và lập bit: Bất cứ bit nào trong 8 bit của cổng C đều có thể được thiết lập hoặc được xoá nhờ sử dụng các lệnh ghi ra thanh ghi điều khiển các bit phù hợp. Như vậy khi cổng C đang được dùng để điều khiển, ghi trạng thái cho cổng A hoặc cổng B thì những bit của cổng C có thể được xoá hoặc được thiết lập nhờ sử dụng các lệnh xoá, thiết lập bit như khi cổng C là cổng ra dữ liệu . 1/ Mode 0.( Basic input/output).
Ðây là chế độ vào ra cơ bản của vi mạch, nó đảm bảo dữ liệu được đưa ra hoặc ghi vào các cổng riêng biệt . Trong chế độ này , vi mạch có các chức năng sau : - Vi mạch hoạt động gồm hai cổng 8 bit và hai cổng 4 bit - Các cổng có thể là cổng vào hoặc cổng ra. - Các tín hiệu ra được chốt lại . - Các tín hiệu vào không được chốt . - Trong chế độ này 8255 có 16 cấu hình hoạt động vào/ra như sau :

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
183
2. Mode 1( Strobe input/output). Trong chế độ này cổng A và cổng B sử dụng các đường dây tín hiệu của cổng C để tạo hoặc tiếp nhận tín hiệu hội thoại ( hanshaking signal ) nghĩa là mọi quá trình trao đổi dữ liệu của từng cổng đều dùng các tín hiệu hội thoại.
Vi mạch hoạt động gồm hai nhóm ,nhóm A và nhóm B.
- Mỗi nhóm chứa một cổng 8 bit và một cổng điều khiển 4 bit. - Cổng 8 bit có thể là cổng vào , hoặc cổng ra ,cả hai cổng vào ra đều là cổng chốt . - Các cổng 4 bit được sử dụng để điều khiển và xác định trạng thái của các cổng 8
bit.
3/Mode2.
Chế độ hoạt động này cung cấp khả năng trao đổi dữ liệu với các thiết bị ngoại vi sử dụng một đường truyền 8 bit để vừa truyền vừa nhận dữ liệu .
Các chức năng cơ bản của Mode 2.
- Trong chế độ này chỉ có nhóm A được sử dụng . - Cổng A là cổng vào/ ra hai chiều 8 bit .
Trong mạch 8255A được kết nối như hình dưới
- Chân CS, 8255A-5 được chọn bằng chân CS của nó để lập trình và phục vụ việc ghi đọc ra cổng I/O. trong mạch chân CS được nối với chân 14 của IC giải mã địa chỉ 74LS138. là tín hiệu điều khiển tích cự mức thấp, khi CS = 0 thì 8255 được phép hoạt động. - Chân RESET là chân xác lập lại trạng thái hoạt động của 8255, chân này có thể nối với chân RESET của vi điều khiển hoặc nối đất.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
184
- Bus dữ liệu (D0 – D7) là các chân trao đổi dữ liệu với vi điều khiển - Chân RD, WR là các chân cho phép và ghi dữ liệu, các chân này có tín hiệu điều khiển tích cực mức thấp, RW = 0 cho phép ghi dư liệu vào, RD là chân cho phép đọc dữc liệu từ 8255, khi vi điều khiển muốn đọc dữ liệu từ 8255 thì chân này được tích cực mức thấp. - Các cổng I/O. 8255 có 3 cổng I/O là PA, PB, PC. Cổng PA được nối với các chân dữ liệu của LCD để gửi các thông tin cần hiển thị lên LCD. Các chân PB0, PB1, PB2 được nối với các chân RS, RW, E của LCD để điều khiển việc đọc ghi dữ liệu ra LCD. 5.2.1.2.5 . Khối Hiển Thị (LCD HD44780)
LCD trong những năm gần đây được sử dụng ngày còng rộng rãi thay thế dần cho các đèn Led: trong phần này em giới thiệu LCD HD44780 của Hitachi là loại LCD phổ biến trên thị trường hiện nay. Hình dạng của LCD được cho như hình dưới Chức năng các chân của LCD : 1. chân Vss, Vdd dùng để cấp nguồn và mát cho LCD còn chân Vee dùng để điều chỉnh độ tương phản, hay độ sáng của đèn nền 2 chân chọn dãy thanh ghi RS: Có hai thanh ghi rất quan trọng bên trong LCD, chân RS được dùng để chọn các thanh ghi này như sau: Nếu RS = 0 thanh ghi lệnh được chọn để cho phép người dùng gửi một lệnh điều khiển ra LCD như xóa màn hình, đưa con trỏ về đầu dòng v v …: Nếu RS = 1 thì thanh ghi dữ liệu được chọn cho phép người dùng gửi dữ liệu cần hiển thị trên LCD 3. chân đọc / ghi (RW) Đầu vào đọc ghi cho phép người dùng ghi thông tin lên LCD khi RW = 0 và đọc thông tin từ nó khi RW = 1 4. chân cho phép E: Chân cho phép E được sử dụng để chốt thông tin hiện hữu trên chân dữ liệu của nó. Khi dữ liệu được cấp đến chân dữ liệu thì thì một xung mức cao xuống thấp phải được áp đến chân này để LCD chốt dữ liệu trên các chân dữ liệu. Xung này phải rộng tối thiểu là 450ns 5 . Chân D0 - D7: Đây là 8 chân dữ liệu, được dùng để đọc thông tin hoặc ghi thông tin lên LCD Để hiển thị các chữ và con số, chúng ta phải gửi các mã ASCII của các chữ các từ a đến z, Từ 0 đến 9 khi chân RS được bật. Để điều khiên LCD hoạt động thì phải ghi các lệnh điều khiển ra LCD thông qua các chân Dữ liệu và các chân điều khiển của LCD, dưới đây là bảng lệnh điều khiển LCD
Mã (hex) Chức năng 1 Xóa hiển thị 2 Trở về đầu dòng 4 Giảm con trỏ (dịch con trỏ sang phải) 6 Tăng con trỏ ( dịch con trỏ sang trái) 5 Dịch con trỏ hiển thi sang phải 7 Dịch con trỏ hiển thị sang trái 8 Tắt hiển thị, tắt con trỏ A Tắt hiển thị, bất con trỏ C Bật hiển thị, tắt con trỏ E Bật hiển thị, nhấp nháy con trỏ F Tắt con trỏ, nhấp nháy con trỏ

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
185
10 Dịch vị trí con trỏ sang trái 14 Dịch vị trí con trỏ sang phải 18 Dịch toàn bộ hiển thị sang trái 1C Dịch tòa bộ hiển thị sang phải 80 Ép con trỏ vũ đầu dòng thứ nhất C0 Ép con trỏ vũ đầu dòng thứ hai 38 Hai dòng và 5x7 điểm ảnh
5.2.1.2.6. khối công suất: là khối điều khiển công suất của lò thông qua xung điều khiển của vi điều khiển. lò là tải sợi đốt sử dụng nguồn xoay chiều 220V trong khi xung điều khiển từ ví điều khiển có có 5V do đó cần có một mạch cách ly. Mạch cách ly thông dụng hiện nay là dùng optotriac, MOC3020 là optotriac được sử dụng khá phổ biến trên thị trường hiện nay, thành phần điều khiển trực tiếp là triác BT139. sơ đồ kết nối mạch được thực hiện như sau
5.2.1.2.7. Khối Vi Điều Khiển Khối vi điều khiển có nhiệm vụ điều khiển toàn bộ hoạt động của hệ thống. Trong ứng
dụng này em sử dụng vi điều khiển 8 bit thuộc họ 8051 là AT89C52.
Sơ đồ mạch vi điều khiển được cho như hình dưới

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
186
Chức năng các chân của vi điều khiển trong mạch như sau:
- Port 0: là port dữ liệu đa hợp và địa chỉ byte thấp. vi điều khiển trao đổi dữ liêu với các khối khác thông qua Port này. Port 0 cũng đóng vai trò là địa chỉ byte thấp khi giao tiếp với RAM ngoài:
- Port 2: là Port địa chỉ byte cao; khi truy xuất bộ nhớ RAM ngoài Port nay xuất các tín hiệu điều khiển nhằn xác định địa chỉ các các byte cao của bộ nhớ dữ liệu ngoài cần được sử dụng.
- Port 3: là Port điều khiển các chân của Port này có các chức năng đặc biệt có thể điều khiển một các độc lập: chân P3.2 là ngõ vào ngắt ngoài 0 chân này được nối với nút nhấn để thực hiện điều chỉnh nhiệt độ độ trong lò. Chân P3.3 là chân ngõ vào ngắt ngoài 1 chân này được nối với chân INTR của ADC để nhận biết ADC đã biến đổi xong hay chưa. Chân P3.5 chân nay được nối với chân WR của ADC để điều khiển ADC hoạt động. chân P3.4 là ngõ ra xung PWM để điều khiển việc cấp nguồn đọng lực cho khối công suất. chân P3.6, P3.7 là các chân ghi đọc điều khiển việc ghi đọc dữ liệu từ các khối khác.
- P1.0, P1.1, P1.2 các chân này được nối với nút nhấn để thực hiện việc cài đặt nhiệt độ mong muốn.
5.2.1.3. Sơ Đồ Nguyên Lý Toàn Mạch
Từ những phân tích trên ta có sơ đồ mạch như hình dưới

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
187
5.2.2.THIẾT KẾ CHƯƠNG TRÌNH ĐIỀU KHIỂN: Chương trình điều khiển thực hiện điều khiển hoạt động các khối khác. như điều
khiển hiển thị, đo nhiệt độ trong lò, nhưng quan trọng nhất là thực hiện chương trình của bộ điều khiển mờ. Bao gồm các chức năng chính như: mờ hóa, hợp thành, giải mờ:
5.2.2.1. Mờ Hóa: Mờ hóa là quá trình biến một giá trị vật lý thành một biến ngôn ngữ. Trong bộ điều
khiển này quá trình mờ hóa đầu vào và đàu ra được thực hiện như sau: + đầu vào DT là sai lệch nhiệt độ thực tế đo được ở lò và nhiệt độ do người dùng cài
đặt: DT = Tdo – Tdat
Trong đó Tdo là nhiệt đọ đo được thực tế trong lò và Tdat là nhiệt độ do người dùng cài đặt.
Đầu vào sai lệch TE được xác định qua 5 thông số là: âm nhiều, âm ít, bằng không, dương ít, dương nhiều, hàm liên thuộc của của các tập mờ này được chọn như hình dưới.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
188
Quá trình mờ hóa đầu vào DT là ánh xạ từ giá trị rõ DT thành các véc tơ μ . DT
a μ . Véctơ μ là tập hợp các hàm liên thuộc:
các giá trị trên được xác định thông qua các công thức như sau:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
189
+ Đầu ra tỷ số độ rộng xung μ được xác định bằng cách cộng thêm một lượng dμ vào giá trị hiện tại của nó. dμ được xác định thông qua 5 giá trị ngôn ngữ là giảm mạnh, giảm, giữ nguyên, tăng và tăng mạnh. Mỗi giá trị ngôn ngữ này được mô tả bằng một tập mờ có hàm liên thuộc như hình dưới.
Quá trình mờ hóa đầu ra dμ là ánh xạ từ giá trị rõ dμ thành véctơ μ :
Các giá trị trên được xác định theo các công thức sau:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
190
Rời rạc hóa các tập mờ. Với dμ nguyên từ -50 đến +50, được xác định theo các công thức sau đây:
( 50); ( 49);.....; (49); (50)GM GM GM GMGM μ μ μ μ= − −
( 50); ( 49);.....; (49); (50)G G G GG μ μ μ μ= − −
( 50); ( 49);.....; (49); (50)GN GN GN GNGN μ μ μ μ= − −
( 50); ( 49);.....; (49); (50)T T T TT μ μ μ μ= − −
( 50); ( 49);.....; (49); (50)TM TM TM TMTM μ μ μ μ= − −
Các giá trị này được lưu dưới các mảng một chiều 101 ở bộ nhớ RAM ngoài
5.2.2.2Hợp thành:
- Xây dựng luật điều khiển: Với bộ điều khiển mờ gồm một đầu vào và một đầu ra ta sử dụng nguyên lý bộ điều
khiển mờ tỷ lệ P. Với việc mờ hóa đầu vào và đầu ra như trên ta đặt ra cho bộ điều khiển 5 luật điều khiển như sau:
R1: nếu DT = AN thì dμ = TM R2: nếu DT = AI thì dμ = T R3: nếu DT = BK thì dμ = GN R4: nếu DT = DI thì dμ = G R5: nếu DT = DN thì dμ = GM
Gọi H1 là độ phụ thuộc của DT vào AN, nghĩa là 1 ( )ANH DTμ= H2 là độ phụ thuộc của DT vào AI, nghĩa là 2 ( )AIH DTμ= H3 là độ phụ thuộc của DT vào BK, nghĩa là 3 ( )BKH DTμ= H4 là độ phụ thuộc của DT vào DI, nghĩa là 4 ( )DIH DTμ= H5 là độ phụ thuộc của DT vào DN, nghĩa là 5 ( )DNH DTμ=
Chọn luật hợp thành, hay luật điều khiển là Max – Min thì ta có : + đầu ra của các luật điều khiển như sau:
1 min( 1; ( 50));min( 1; ( 49));...;min( 1; (50))TM TM TMR H H Hμ μ μ= − −
2 min( 2; ( 50));min( 2; ( 49));...;min( 2; (50))T T TR H H Hμ μ μ= − −
3 min( 3; ( 50));min( 3; ( 49));...;min( 3; (50))GN GN GNR H H Hμ μ μ= − −
4 min( 4; ( 50));min( 4; ( 49));...;min( 4; (50))G G GR H H Hμ μ μ= − −

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
191
5 min( 5; ( 50));min( 5; ( 49));...;min( 5; (50))GM GM GMR H H Hμ μ μ= − − -hợp mờ:
Đầu ra R của thiết bị hợp thành được xác định theo công thức sau: R[j] = maxR1[j], R2[j], R3[j], R4[j], R5[j] với j ∈ [0,100]
5.2.2.3.Giải Mờ: Chọn phương pháp giải mờ là phương pháp điểm trọng tâm. Khi đó kết quả thu được
của giá trị rõ dμ được xác định theo công thức sau: 100
0100
0
[j]
[j]
j
j
jRd
Rμ =
=
=∑
∑
Giá trị rõ dμ này được sử dụng để tạo ra xung vuông có tỷ số độ rộng bằng dμ μ+ . Ban đầu μ có độ rộng bằng 50%. Sau đó tùy vào nhiệt độ sai lệch mà công thêm một lượng dμ phù hợp để nhiệt độ lò và nhiệt độ đặt bằng nhau. 5.2.3. Nguyên Lý Hoạt Động.
Mạch hoạt động dựa trên nguyên lý của bộ điều khiển mờ. Nhiệt độ trong lò được đo bằng khối cảm biến nhiệt, khối khuếch đại và được đưa vào khối A/D để chuyển đổi tín hiệu từ tương tự sang số trước khi đưa vào bộ khi điều khiển. Nhiệt độ trong lò được so sánh với nhiệt độ mong muốn do người dùng cài đặt thông qua 4 nút nhấn. Sự sai lệch nhiệt độ đặt và nhiệt độ đo là đầu vào của bộ điều khiển mờ. Bộ điều khiển mờ làm nhiệm vụ mờ hóa tín hiệu đầu vào, hợp thành, giải mờ và cho ra một xung điều khiển có tỷ số độ rộng bằng dμ giá trị này được cộng với một xung vuôngμ có độ rộng ban đầu bằng 50%. Xung điều khiển này được đưa tới mạch công suất để điều khiển việc cấp nguồn cho sợi đốt. tùy vào giá trị sai lệch nhiệt độ mà xung điều khiển có độ rộng khác nhau. Nhưng chu kỳ T được giữ cố định:
T = Ton + Toff. Khi nhiệt độ đo thấp hơn nhiệt độ đặt thì Ton tăng và ngược lại. Ton có thể thay đổi từ 0% tới 100% do đó công suất lò có thể thay đổi từ không tới cực đại. Do đó ta có thể điều khiển nhiêt độ trong lò ở một nhiệt độ nào đó. 5.2.4. GIẢI THUẬT VÀ CHƯƠNG TRÌNH 5.2.4. 1. Chương Trình Vi Điều Khiển
Phần mềm hay chương trình có chức năng điều khiển phẩn cứng hoạt động. Chương trình điều khiển lò nhiệt được viết bằng ngôn ngữ C. C là một ngôn ngữ cấp cao được sử dụng khá phổ biến hiện nay. Chương trình là phần quan trọng nhất của hệ thống. Chương trình sẽ điều khiển toàn bộ quá trình hoạt động của hệ thống, thông qua các dữ liệu mà nó nhận được và thực hiện theo yêu cầu của người lập trình.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
192
Để viết chương trình điều khiển mờ nhiệt độ là nhiệt thông thường phải thực hiện theo các bước sau:
1. Xác định yêu cầu cần phải thực hiện 2. Tìm hiểu lý thuyết điều khiển mờ 3. Tìm hiểu ngôn ngữ lập trình c,phàn mềm keil c 4. Xác định các thành phần, phần cứng của hệ thống 5. Vẽ lưu dồ giải thuật 6. Viết chương trình hoàn chỉnh
5.2.4.1.1. Lưu Đồ Giải Thuật
5.2.4.1.1.1.Lưu Đồ Giải Thuật Chương Trình Chính(main).
Chương trình chính có nhiệm vụ điều khiển hoạt động của toàn hệ thống bằng cách gọi các hàm con tương ứng
5.2.4.1.1.2. Lưu Đồ Chương Trình Con Khởi Tạo 8255, mờ hóa đầu ra(setting)

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
193
5.2.4.1.1.3.Lưu Đồ Chương Trình Con Khởi Tạo LCD(LCDSetup)

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
194
5.2.4.1.1.4. các lưu đồ chương trình con mờ hóa đầu vào

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
195

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
196
Mã Nguồn Chương Trình C Điều Khiển Hệ Thống : duøng phaàn meàm Keil μVision Sinh vieân töï thöïc hieän xem nhö baøi taäp.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
197
5.2.4.2 . Chương Trình VB Và Đồ Thị Nhiệt Độ Màn hình chương trình giao tiếp VB:
Chöông trình Visual Basic 6.0: Sinh vieân töï thöïc hieän xem nhö baøi taäp.
Nhận xét: Màn hình giao tiếp còn đơn giản, đồ thị đáp ứng còn chậm Chương trình VB dung để tạo giao diện trên máy tính. Bao gồm việc hiển thị nhiệt
độ đặt và nhiệt độ thực tế trong lò. Đồng thời thể hiện đường đồ thị nhiệt độ hay dữ liệu nhiệt độ thu được thông qua cổng com.
5.2.5. MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN MỜ TRÊN MATLAB 5.2.5.1. Giới Thiệu Các Công Cụ Trên Trên Matlab:
MatLab vừa là môi trường vừa là ngôn ngữ lập trình được viết trên cơ sở toán học như:lý thuyết ma trận, đại số tuyến tính, phân tích số… nhằm mục đích tính toán khoa học và kỹ thuật.
Matlab cho phép người sử dụng thiết kế các hộp công cụ riêng của mình. Ngày càng nhiều các hộp công cụ được tạo ra bởi các nhà nghiên cứu trong các lĩnh vực khác nhau. Sau đây là một số hộp công cụ trong Matlab được dùng trong lĩnh vực điều khiển tự động.
Control System Toolbox: nền tảng của một nhóm các dụng cụ để thiết kế trong lĩnh vực điều khiển. Bao gồm các hàm dành cho việc mô hình hóa, phân tích thiết kế hệ thống điều khiển tự động.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
198
Frequency Domain System Identification Toolbox: bao gồm một tập các file.m dùng cho việc mô hình háo hệ thống tuyến tính dựa trên sự đo lường đáp tuyến tần số của hệ thống .
Fuzzy Logic Toolbox: bao gồm một tập hoàn chỉnh các giao diện với người dùng dành cho việc thiết kế, mô phỏng và phân tích hệ thống lôgic .
Neutral Network Toolbox: bao gồm một tập các hàm của Matlab dành cho việc thiêt kế và mô phỏng mang nơron.
Nonlinear Control Design Toolbox: là một giao diện đồ họa người dùng cho phép thiết kế hệ thống điều khiển tuyế tính và phi tuyến sử dụng kỹ thuật tối ưu trong miền thời gian.
Simulink: Simulink là phần mô phỏng của MatLab tạo ra thêm một môi trường đồ họa dùng cho việc mô hình hóa, mô phỏng và phân tích hệ tuyến tính và phi tuyến động.
System Identification Toolbox: bao gồm các công cụ để phỏng tính và nhận dạng hệ thống.
5.2.5.2. Thiết Kế Hệ Thống Thống Điều Khiển Mờ Nhiệt Độ Lò Điện Dùng Fuzzy logic
FIS Editor: FIS Editor cho phép xác định số đầu vào, số đầu ra, đặt tên các biến vào, các biến
ra.
FIS Editor được gọi khi đánh “Fuzzy” tại dấu nhắc của MatLab.
Theo yêu cầu cầu của mô hình ta thế kế bộ điều khiển mờ một ngõ vào và một ngõ ra. Ngõ vào là sai lệch nhiệt độ DT giữa giá trị đo và giá trị đặt. ngõ ra là xung điều
khiển dμ .

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
199
Để xác định hàm liên thuộc cho biến ngõ vào ta chọn input rồi chọn các hàm liên thuộc như hình dưới.
Name: đặt tên cho các hàm liên thuộc.
Type: chọn kiểu hàm liên thuộc: ta chọn hình tam giác:
Params: chọn điểm đầu đỉnh và điểm cuối của hàm liên thuộc, hay các giá trị vật lý cho các hàm liên thuộc.
Range: chọn khoảng giá trị vật lý cho biến ngõ vào.
Để thêm các hàm liên thuộc ta vào Edit rồi chọn add MFs.
Hàm liên thuộc của biến ngõ ra cũng được xây dựng tương tự như trên. Với 5 hàm
liên thuộc được cho như hình dưới.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
200
Chọn luật điều khiển:
Để chọn luật điều khiển ta vào Edit rồi chọn Rules: chọn một biến của ngõ vào ở cửa sổ input is rồi chọn một biến ở ngõ ra output is rồi click vào Add rule. Nếu muốn thay đổi luật điều khiển ta chọn chang rule, và chọn Delete rule để xóa luật điều khiển.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
201
Để kiểm tra hoạt động của bộ điều khiển mờ ta vào view chọn rule trong ô input chọn các giá trị ngõ vào để thấy các biến ngõ ra.
Để biết được đặc tính truyền đạy của bộ điều khiển mờ ta vào view rồi chon surface
5.2.5.3. Kết Quả Mô Phỏng Bộ Điều Trên Simulink:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
202
Tại dấu nhắc của Matlab gõ ‘simulink’ để kích hoạt màn hình làm việc của simulink
Để tạo một file mới vào file chọn new model Vào thư viện simulink chọn các khối của hệ thống và kéo thả vào trang cần thiết kế.
Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
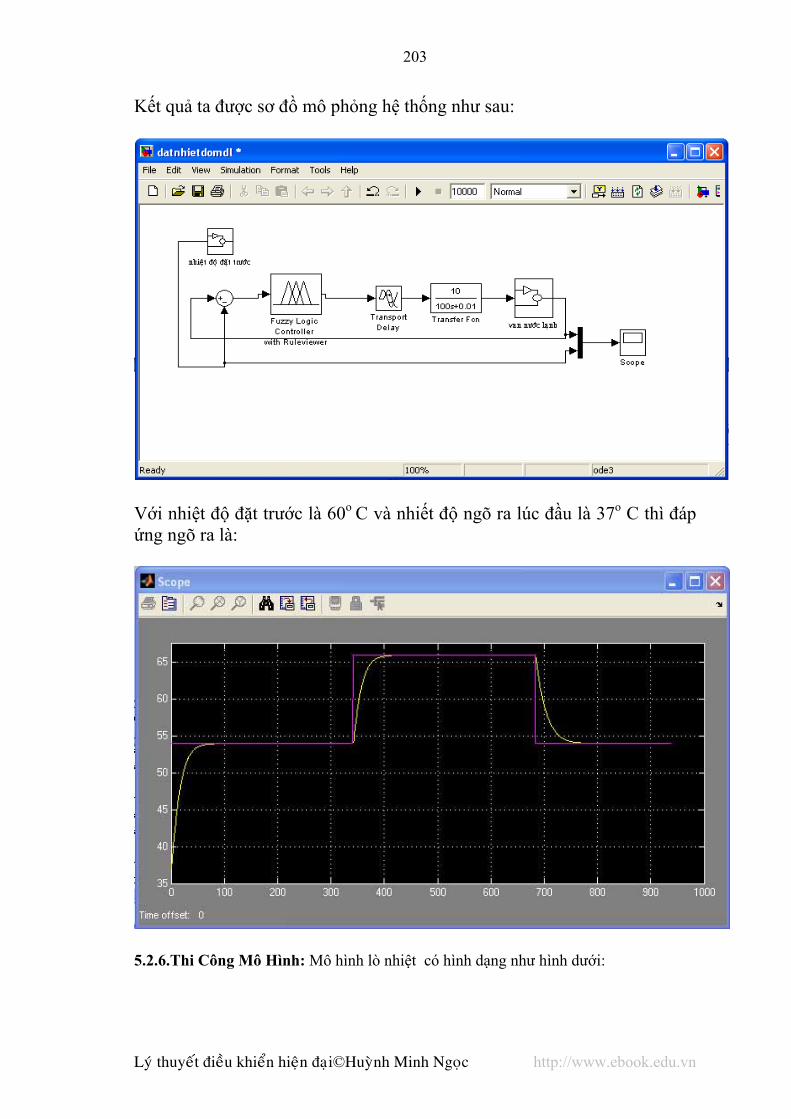
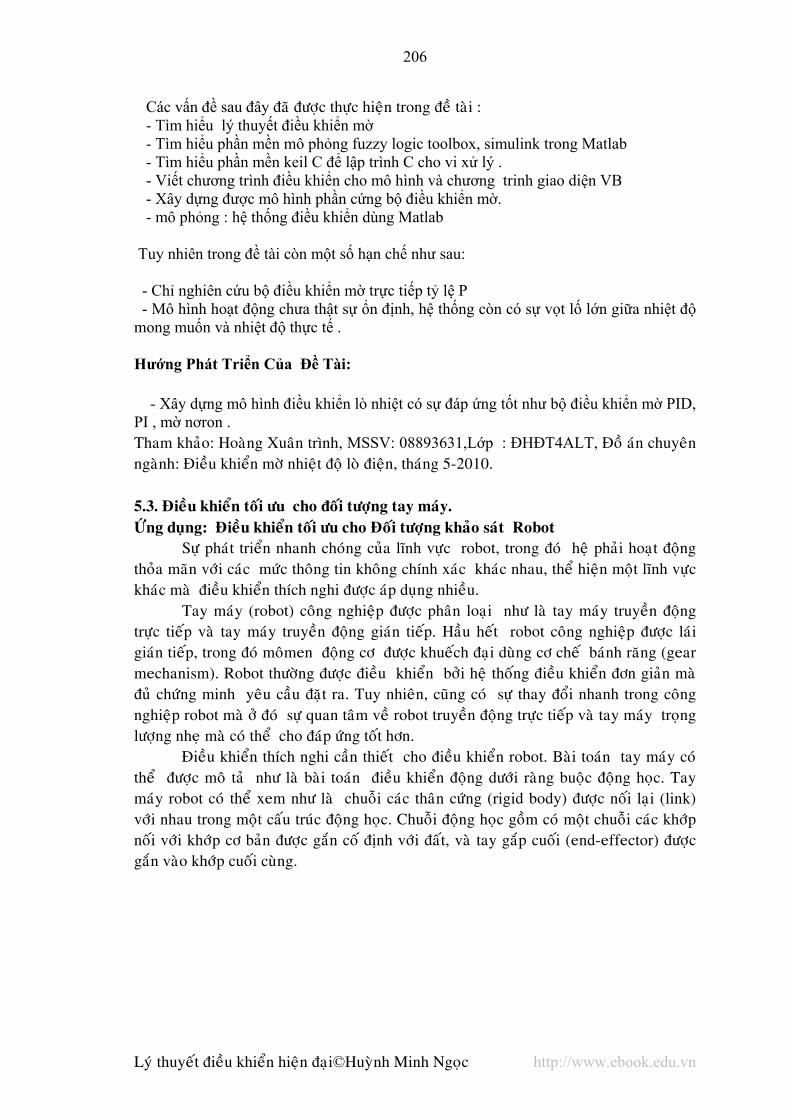
203
Kết quả ta được sơ đồ mô phỏng hệ thống như sau:
Với nhiệt độ đặt trước là 60o C và nhiết độ ngõ ra lúc đầu là 37o C thì đáp ứng ngõ ra là:
5.2.6.Thi Công Mô Hình: Mô hình lò nhiệt có hình dạng như hình dưới:

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
204

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
205
5.2.7. KẾT LUẬN Kết luận
Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
206
Các vấn đề sau đây ñaõ ñöôïc thöïc hieän trong ñeà taøi : - Tìm hiểu lý thuyết điều khiển mờ
- Tìm hiểu phần mền mô phỏng fuzzy logic toolbox, simulink trong Matlab - Tìm hiểu phần mền keil C để lập trình C cho vi xử lý . - Viết chương trình điều khiển cho mô hình và chương trinh giao diện VB - Xây dựng được mô hình phần cứng bộ điều khiển mờ.
- mô phỏng : hệ thống điều khiển dùng Matlab Tuy nhiên trong đề tài còn một số hạn chế như sau: - Chỉ nghiên cứu bộ điều khiển mờ trực tiếp tỷ lệ P - Mô hình hoạt động chưa thật sự ổn định, hệ thống còn có sự vọt lố lớn giữa nhiệt độ mong muốn và nhiệt độ thực tế . Hướng Phát Triển Của Đề Tài:
- Xây dựng mô hình điều khiển lò nhiệt có sự đáp ứng tốt như bộ điều khiển mờ PID, PI , mờ nơron . Tham khaûo: Hoaøng Xuaân trình, MSSV: 08893631,Lớp : ĐHĐT4ALT, Ñoà aùn chuyeân ngaønh: Ñieàu khieån môø nhieät ñoä loø ñieän, thaùng 5-2010. 5.3. Ñieàu khieån toái öu cho ñoái töôïng tay maùy. ÖÙng duïng: Ñieàu khieån toái öu cho Ñoái töôïng khaûo saùt Robot
Söï phaùt trieån nhanh choùng cuûa lónh vöïc robot, trong ñoù heä phaûi hoaït ñoäng thoûa maõn vôùi caùc möùc thoâng tin khoâng chính xaùc khaùc nhau, theå hieän moät lónh vöïc khaùc maø ñieàu khieån thích nghi ñöôïc aùp duïng nhieàu.
Tay maùy (robot) coâng nghieäp ñöôïc phaân loaïi nhö laø tay maùy truyeàn ñoäng tröïc tieáp vaø tay maùy truyeàn ñoäng giaùn tieáp. Haàu heát robot coâng nghieäp ñöôïc laùi giaùn tieáp, trong ñoù moâmen ñoäng cô ñöôïc khueách ñaïi duøng cô cheá baùnh raêng (gear mechanism). Robot thöôøng ñöôïc ñieàu khieån bôûi heä thoáng ñieàu khieån ñôn giaûn maø ñuû chöùng minh yeâu caàu ñaët ra. Tuy nhieân, cuõng coù söï thay ñoåi nhanh trong coâng nghieäp robot maø ôû ñoù söï quan taâm veà robot truyeàn ñoäng tröïc tieáp vaø tay maùy troïng löôïng nheï maø coù theå cho ñaùp öùng toát hôn.
Ñieàu khieån thích nghi caàn thieát cho ñieàu khieån robot. Baøi toaùn tay maùy coù theå ñöôïc moâ taû nhö laø baøi toaùn ñieàu khieån ñoäng döôùi raøng buoäc ñoäng hoïc. Tay maùy robot coù theå xem nhö laø chuoãi caùc thaân cöùng (rigid body) ñöôïc noái laïi (link) vôùi nhau trong moät caáu truùc ñoäng hoïc. Chuoãi ñoäng hoïc goàm coù moät chuoãi caùc khôùp noái vôùi khôùp cô baûn ñöôïc gaén coá ñònh vôùi ñaát, vaø tay gaép cuoái (end-effector) ñöôïc gaén vaøo khôùp cuoái cuøng.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
207
Hình 1. Sô ñoà thaân töï do 1. Moâ taû toaùn hoïc 2.Ñoäng hoïc, ñoäng löïc hoïc robot. Moâ hình toaùn hoïc: [8]
Moâ taû ñaày ñuû cuûa phöông trình kieåm soaùt ñoäng löïc hoïc tay maùy robot coù theå ñöôïc tham khaûo trong saùch [8]. Trong phaàn naøy , ta duøng coâng thöùc Newton-Euler ñeå tìm phöông trình chuyeån ñoäng(ta coù theå duøng coâng thöùc Lagrange). Cho fi-1,i ñöôïc ñònh nghóa laø löïc taùc ñoäng cuûa khôùp (i-1) leân treân khôùp I, mi laø khoái löôïng cuûa khôùp I,
iCv laø vaän toác tuyeán tính cuûa troïng taâm Ci cuûa khôùp I vôùi töông
öùng tôùi heä toaï ñoä coá ñònh (hình 3.1). Caân baèng löïc tuyeán tính ñaït ñöôïc:, Vôùi i=1,2,.. (3-1)
Trong ñoù taát caû vectô ñöôïc ñònh nghóa vôùi tham chieáu tôùi khung toïa ñoä cô sôû vaø coù n lieân keát (n link). Töông töï, neáu Ni-1,i ñöôïc ñònh nghóa laø moâmen aùp duïng vaøo khôùp I bôûi khôùp i-1, ri-1,i laø vectô vò trí töø ñieåm Oi-1 tôùi Oi trong hình 1, ωi laø vaän toác goùc vaø Ii laø moâmen troïng taâm cuûa khôùp i; nhö vaäy caân baèng moâmen coù theå ñöôïc daãn
ra nhösau: 0).(,1,11,,1,,1 =×−×−×−×+− −−++− iiiiiiiciiiiciiiiii IIfrfrNN ϖϖϖ& vôùi i=1,2,.. (3-2)
Phöông trình (3-1) vaø (3-2) coù theå ñöôïc hieäu chænh ñeå maø chuùng bieåu dieãn caùc bieán vaøo ra, maø coù theå ño ñöôïc. Choïn moâmen khôùp noái τ laø bieán ngoõ vaøo vaø khoaûng caùch dòch chuyeån moái noái [ ]Tnqqqq ,...,, 21= laø bieán ngoõ ra maø ñònh vò toaøn caùnh tay. Chuùng ta ñöa ra phöông trình ñoäng, maø töông öùng vôùi tay maùy thuoäc veà maët
01,,1 =−+− +− Ciiiiiii vmgmff &

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
208
phaúng hai baäc töï do vôùi hai khôùp noái rieâng bieät. Phöông trình bieåu dieãn thoâng qua moâmen khôùp 1τ vaø 2τ vaø khoaûng caùch dòch chuyeån khôùp q1 vaø q2 cuûa hai lieân keát. Tay maùy 2 lieân keát (Two link Arm) Phöông trình (3-1) vaø (3-2) cho lieân keát 1 vaø lieân keát 2 laø töông öùng:
0
0
111,01,02,11,12,11,0
112,11,0 1
=−×−×+−
=−+−
ϖ&&
IfrfrNN
vmgmff
CC
C (3-3)
vaø
0
0
222,12,12,1
122,1 2
=−×−
=−+
ϖ&&
IfrN
vmgmf
C
C (3-4)
Hình 2:Tay maùy robot 2 lieân keát Ñoái vôùi robot thuoäc veà maët phaúng , chuùng ta coù 11,0 τ=N vaø 22,1 τ=N . Cuõng vaäy,
vaän toác goùc ω1 vaø ω2 coù theå ñöôïc bieåu dieãn nhö sau: 21211 , qqq &&& +== ϖϖ
vaø vaän toác tuyeán tính 1Cv vaø
2Cv coù theå ñöôïc vieát nhö sau:
⎥⎦
⎤⎢⎣
⎡−=
111
111
cossin
1 qqlqql
vC
CC &
&

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
209
⎥⎦
⎤⎢⎣
⎡+++++−++−
=2212221211
2212121211
)cos()cos(cos)sin()sin(sin
2 qqqlqqqlqlqqqlqqqlql
vCC
CCC &&
&&
trong ñoù l, lc1 vaø lC2 ñöôïc kí hieäu ôû hình 2. Söû duïng quan heä ôû treân, phöông trình (3-3) vaø (3-4) coù theå ñôn giaûn hoùa thaønh caùc phöông trình:
2221112222
112122212111 2
ττ
=+−+
=+−−+
GqhqMqM
GqqCqhqMqM&&&&&
&&&&&&& (3-5)
trong ñoù
)cos(]cos)cos([cos
sincos
]cos2[
21222
1121221111
2212
22
22221212
22
2222
2212
22
1212
1111 2
qqglmGqlqqlgmqglmG
qllmhIlmqllmM
IlmM
IqllllmIlmM
C
CC
C
CC
C
CCC
+=+++=
=++=
+=
+++++=
(3-6)
Phöông trình (3-5) coù theå ñöôïc vieát laïi: τ=++ GqCqM &&& (3-7)
trong ñoù [ ]Tqqq 21,=
⎥⎦
⎤⎢⎣
⎡ −−−=⎥
⎦
⎤⎢⎣
⎡=
0,
1
212
2212
1211
qhqhqhqh
CMMMM
M&
&&& vaø ⎥
⎦
⎤⎢⎣
⎡=
2
1
GG
G
Roõ raøng thaáy raèng ma traän G laø ñoái xöùng, xaùc ñònh döông vaø laø haøm phi tuyeán cuûa q. Hôn nöõa C laø haøm cuûa caû q vaø q& , ma traän CM 2−& ñöôïc cho bôûi:
laø caáu truùc khoâng ñoái xöùng. Vectô G cuõng phuï thuoäc phi tuyeán vaøo q. Thaønh phaàn G1 vaø G2 laø lieân quan troïng löôïng. Chuùng theå hieän moâmen taïo bôûi khoái löôïng mi quanh truïc moái noái rieâng. Vì vaäy G thay ñoåi theo caáu hình tay maùy cuõng nhö khoái löôïng cuûa taûi maø caùnh tay maùy mang. M11 töông öùng moâmen quaùn tính toång coäng cuûa taát caû caùc lieân keát lieân quan ñeán truïc moái noái thöù i. Thaønh phaàn 2
1qh & vaø 22qh & lieân quan ñeán löïc trung taâm, trong khi 21qqh && lieân quan löïc Coriolis
maø bò gay ra khi khoái löôïng m di chuyeån ôû vaän toác v töông ñoái vôùi khung toïa ñoä chuyeån ñoäng quay ôû vaän toác goùc ω. DUØng phöông trình Lagrange daãn ra phöông trình ñoäng hoïc : Ta coù ñoäng naêng toång coäng cuûa robot:
qqMqT T && )(21=
Naêng löôïng troïng tröôøng: GH=GH(q) Goùc khôùp q ñöôïc ño vôùi chieàu ngöôïc chieàu kim ñoàng hoà. Vaø ta tìm phöông trình Euler-Lagrangian.
⎥⎦
⎤⎢⎣
⎡−
++⎥
⎦
⎤⎢⎣
⎡−
−−=−
02222
02
21
212
2
22
qhqhqhqh
qhqhqh
CM&
&&&
&
&&&

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
210
Lagrangian laø )()(21 qGqqMqGTL H
TH −=−= &&
Phöông trình Lagrange:
τ=∂∂−
∂∂
qL
qL
dtd
&
töø phöông trình naøy cho ra: τ=++ )(),()( qGqqbqqM &&&
qGqG H
∂∂
=)( :vectô löïc troïng tröôøng
b: vectô coù chieàu nx1 , laø vectô löïc Coriolis vaø löïc trung taâm:
qTqMqqb∂∂−= &&&),(
Ta coù theå vieát bi laø tích cuûa vectô haøng 1xn ),( qqci & vaø vectô vaän toác q& : qcb ii &.=
ôû daïng ma traän qqqCqqb &&& ).,(),( =
Nhö vaäy: τ=++ GqCqM &&& (laø phöông trình (3-7).
Toång quaùt, phöông trình moâ taû tay maùy n baäc töï do coù cuøng daïng (3-7), trong
ñoù q vaø q& laø vectô n chieàu kí hieäu dòch chuyeån moái noái vaø vaän toác moái noái töông öùng. M, C vaø G laø ma traän nxn lieân quan ñeán moâmen quaùn tính, Coriolis vaø löïc trung taâm, vaø löïc troïng tröôøng töông öùng, vaø nRt ∈)(τ laø ngoõ vaøo ñieàu khieån goàm coù moâmen aùp duïng hay löïc. M coù theå ñöôïc minh hoïa laø xaùc ñònh döông treân toaøn khoâng gian laøm vieäc, cuõng nhö caùc bò chaën ôû treân, vì noù chæ chöùa ña thöùc bao goàm haøm tieân nghieäm cuûa q. Ma traän C laø tuyeán tính trong q& vaø bò chaën trong q, vì noù cuõng chæ chöùa ña thöùc cuûa haøm tieân nghieäm ôû vò trí toång quaùt hoùa. Ma traän CM 2−& laø caáu truùc khoâng ñoái xöùng . Ma traän G coù caáu truùc töông ñoái ñôn giaûn hôn M vaø C vaø chöùa ña thöùc bao goàm haøm tieân nghieäm (tröøu töôïng) cuûa q. Trong daãn ra cuûa (3-5), ñoäng löïc hoïc truyeàn ñoäng, thaønh phaàn do ma saùt vaø aûnh höôûng vì baõo hoøa ngoõ vaøo bò boû qua. Thaäm chí vôùi söï ñôn giaûn nhö vaäy, roõ raøng thaáy laø moâ hình cuûa (3-7) laø phi tuyeán vaø bò gheùp noái raát maïnh. Moâ hình naøy taïo neân ñieåm baét ñaàu cho taát caû khaû naêng ñieàu khieån thích nghi ñöôïc moâ taû sau ñaây. Tröôøng hôïp robot 3 khôùp noái , tham soá lieân keát laø: i 1−iα 1−ia id iθ 1 0 0 0 1q 2 0 l1 0 2q 3 0 l2 0 3q

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
211
AÛnh höôûng phi tuyeán leân treân ñoái töôïng vaø heä coù nhieàu ngoõ vaøo nhieàu ngoõ ra (MIMO).
Chuùng ta ñeán ñoäng löïc hoïc truyeàn ñoäng, thaønh phaàn do ma saùt vaø aûnh höôûng vì baõo hoøa ngoõ vaøo.
Ñoái vôùi muïc ñích thieát keá ñieàu khieån, chuùng ta giaû söû raèng caùnh tay robot laø tay maùy caûi tieán vôùi ñoäng löïc hoïc ñöôïc cho bôûi:
dSdm TqFqFqGqqqVqqM +++++= )()(),()( &&&&&&τ trong ñoù M laø moâmen quaùn tính, Vm (hay C) laø löïc coriolis vaø moment (torque) trung taâm, G laø löïc troïng tröôøng. Fd laø ma traän ñöôøng cheùo xaùc ñònh döông nxn maø ñöôïc duøng ñeå theå hieän heä soá ñoäng hoïc cuûa ma saùt nhôùt (viscous friction), )(qFS & laø vectô nx1 chöùa thaønh phaàn ma saùt tónh, Td laø vectô nx1 theå hieän nhieãu bò chaën chöa bieát.

Lyù thuyeát ñieàu khieån hieän ñaïi©Huyønh Minh Ngoïc http://www.ebook.edu.vn
212
TAØI LIEÄU THAM KHAÛO [1]. Frank L. Lewis, Vassilis L. Syrmos, Optimal Control, John Wiley & Sons, Inc, 1995, ISBN 0-471-03378-2. [2]. Brian D.O. Anderson, John B. Moore, Optimal Control-Linear quadratic methods, Prentice Hall, 1989, ISBN 0-13-638651-2. [3].Donald E. Kirk, Optimal Control: an introduction, Dover Publication, 2004 (Origin: Prentice Hall, 1970). [4]. Kemin Zhou, John C. Doyle and Keith Glover, Robust and Optimal Control, Prentice Hall, 1996, ISBN 0-13-456567-3.
[5]. Karl Johan mostrAo
&& , rnoBj && Wittenmark, Adaptive Control, Addison-Wesley, 1989, ISBN 0-201-09720-6 and 2nd edition, Dover, 2008 ISBN -13: 978-0-486-46278-3. [6]. Li-Xin Wang, A course in fuzzy systems and control, Prentice Hall, 1997, ISBN 0-13-540882-2. [7]. Jean-Jacques E. Slotine, Weiping Li, Applied nonlinear control, Prentice Hall, 1991, ISBN 0-13-040890-5 and reprinted by Pearson and China Machine Press, 2004 ISBN 7-111-15218-2. [8]. Katsuhiko Ogata, Modern Control Engineering, Prentice Hall, 4th ed., 2002,ISBN 0-13-060907-2. [9]. L.X. Wang, “Stable adaptive fuzzy controllers with application to inverted pendulum tracking,” IEEE Trans. Syst., Man, Cybern., vol. 26, pp.677-691, October 1996. [10]. Lefteri H.Soukalas, Robert E. Uhrig, Fuzzy and Neural approaches in engineering, Wiley –Interscience Publication, 1997. [11]. Nguyeãn Thò Phöông Haø, Lyù thuyeát ñieàu khieån hieän ñaïi, NXB ÑHQG Tp. HCM, 2009. [12]. Nguyeãn Doaõn Phöôùc, Phan Xuaân Minh, Lyù thuyeát ñieàu khieån môø, NXB KHKT, Haø noäi, 2002. [13]. Ñoà aùn toát nghieäp ñaïi hoïc cuûa caùc sinh vieân ñaïi hoïc ngaønh ñieän töû töï ñoäng. [14]. Nguyeãn caûnh, Moät soá phöông phaùp toái öu hoùa, Ñaïi hoïc Baùch khoa Tp. HCM, 1991.





























