Embed Size (px)
DESCRIPTION
CONTROL AUTOMATICO
Citation preview

INGENIERÍA DE CONTROL AUTOMÁTICO
Mag. Ing. FIDEL HUMBERTO ANDÍA GUZMÁN

II. MATEMÁTICA APLICADA.• SISTEMAS LINEALES ESTACIONARIOS EN TIEMPO CONTINUO.
– Éstos pueden siempre representarse por una ecuación diferencial ordinaria de la forma:
• VARIABLES COMPLEJAS Y FUNCIONES COMPLEJAS.– Variable Compleja.-
– Función Compleja.-
)t(ubdt
)t(udb)t(ya
dt
)t(yda
dt
)t(ydm
m
mn
n
nn
n
001
1
1
js
yx jFFsF )(22
yx FF)s(F x
y
F
F1 tan

• Son los puntos singularesen los que G(s) o susderivadas tienden ainfinito.
Polos.-
• Son los puntos en loscuales la función G(s) esigual a cero.Ceros.-

• EL TEOREMA DE EULER.-– Se obtiene a partir de la expansión en serie de senos y cosenos, de
manera que:
– Sumando ambas y restando amas ecuaciones, se obtiene:
• LA TRANSFORMADA DE LAPLACE.– Existe siempre y cuando la función sea seccionalmente continua y de
orden exponencial, se define mediante:
jejsencos jejsencos
jj eecos 2
1 jj eej
sen 2
1
0;)()()(0
tparadtetfsFtfL st

Transformada de Laplace con MATLAB
• laplace: Determina la transformada de Laplace deuna función temporal en forma simbólica.
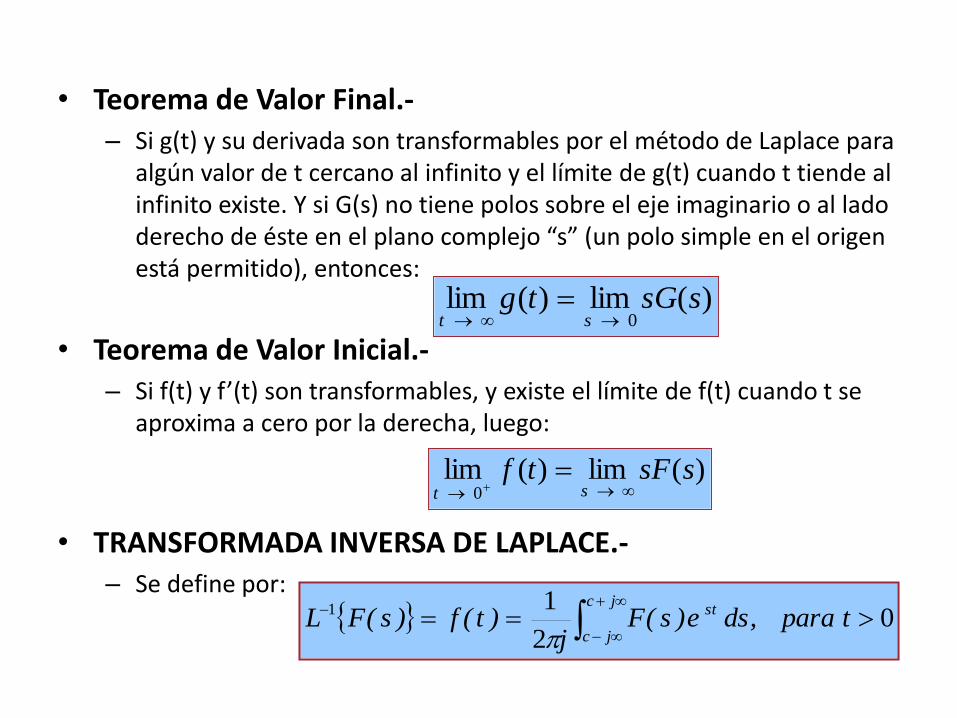
• Teorema de Valor Final.-– Si g(t) y su derivada son transformables por el método de Laplace para
algún valor de t cercano al infinito y el límite de g(t) cuando t tiende al infinito existe. Y si G(s) no tiene polos sobre el eje imaginario o al lado derecho de éste en el plano complejo “s” (un polo simple en el origen está permitido), entonces:
• Teorema de Valor Inicial.-– Si f(t) y f’(t) son transformables, y existe el límite de f(t) cuando t se
aproxima a cero por la derecha, luego:
• TRANSFORMADA INVERSA DE LAPLACE.-– Se define por:
)(lim)(lim0
ssGtgst
)(lim)(lim0
ssFtfst
02
11
tpara,dse)s(Fj
)t(f)s(FLjc
jc
st

• Expansión en Fracciones Parciales para encontrar lasTransformadas Inversas de Laplace.-– Si G(s) = Q(s)/P(s) se separa en componentes:
– La transformada inversa se determinaría de la siguiente manera:
• Si G(s) tiene polos simples, entonces:
– El coeficiente de la k-ésima fracción parcial se obtiene haciendo:
Además
– Finalmente:
)s(F)s(F)s(F)s(F n 21
)t(f)t(f)t(f)}s(F{L)}s(F{L)}s(F{L)}s(F{L nn 21
1
2
1
1
11
n
n
n
m
ps
a
ps
a
ps
a
)ps(....)ps()ps(
)zs()zs)(zs(K
)s(P
)s(Q)s(G
2
2
1
1
21
21
kps
kk)s(P
)s(Q)ps(a
tp
k
k
k kea}ps
a{L
1
tp
n
tptp neaeaea)}s(G{L 21
21
1
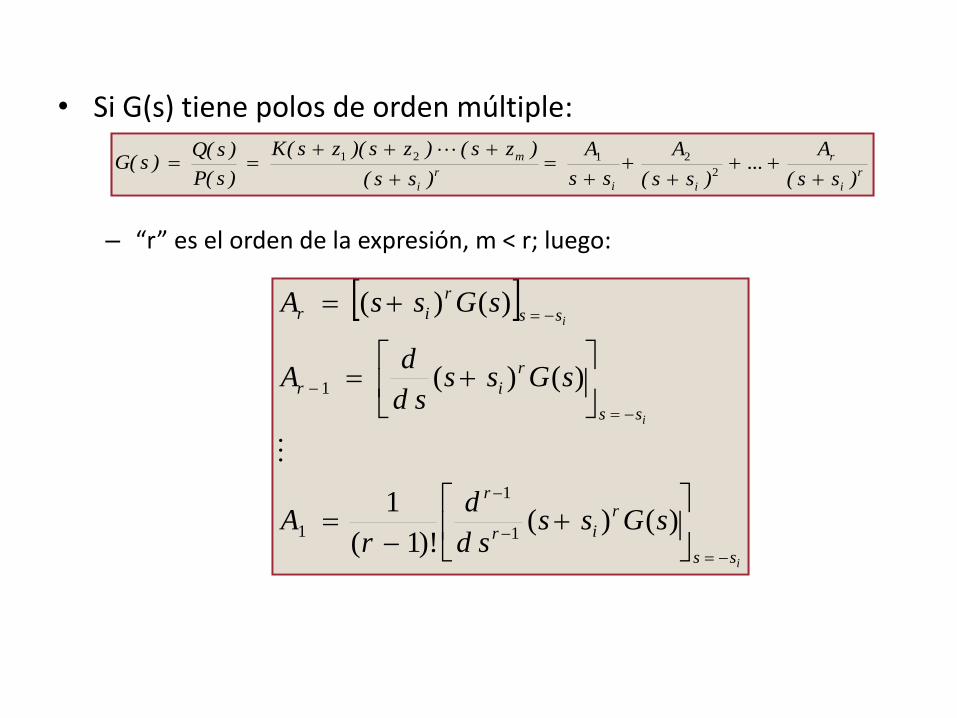
• Si G(s) tiene polos de orden múltiple:
– “r” es el orden de la expresión, m < r; luego:
r
i
r
ii
r
i
m
)ss(
A...
)ss(
A
ss
A
)ss(
)zs()zs)(zs(K
)s(P
)s(Q)s(G
2
2121
i
i
i
ss
r
ir
r
ss
r
ir
ss
r
ir
sGsssd
d
rA
sGsssd
dA
sGssA
)()()!1(
1
)()(
)()(
1
1
1
1

• EXPANSIÓN EN FRACCIONES PARCIALES CON MATLAB.
– Considere la función:
En donde algunos de los ai y bj pueden ser cero. En MATLAB, losvectores renglón num y den especifican los coeficientes delnumerador y del denominador de la función.
– Es decir:
– El comando:
encuentra los residuos, los polos y los términos directamente deuna expansión en fracciones parciales del cociente de dospolinomios Q(s) y P(s). Luego, la expansión en fraccionesparciales, queda:
0
1
1
0
1
1
asas
bsbsb
den
num
)s(P
)s(Q)s(F
n
n
n
n
n
n
n
01
01
1 aaden
bbbnum
n
nn
)den,num(residuek,p,r
)s(k)n(ps
)n(r
)(ps
)(r
)(ps
)(r
)s(P
)s(Q)s(F
2
2
1
1
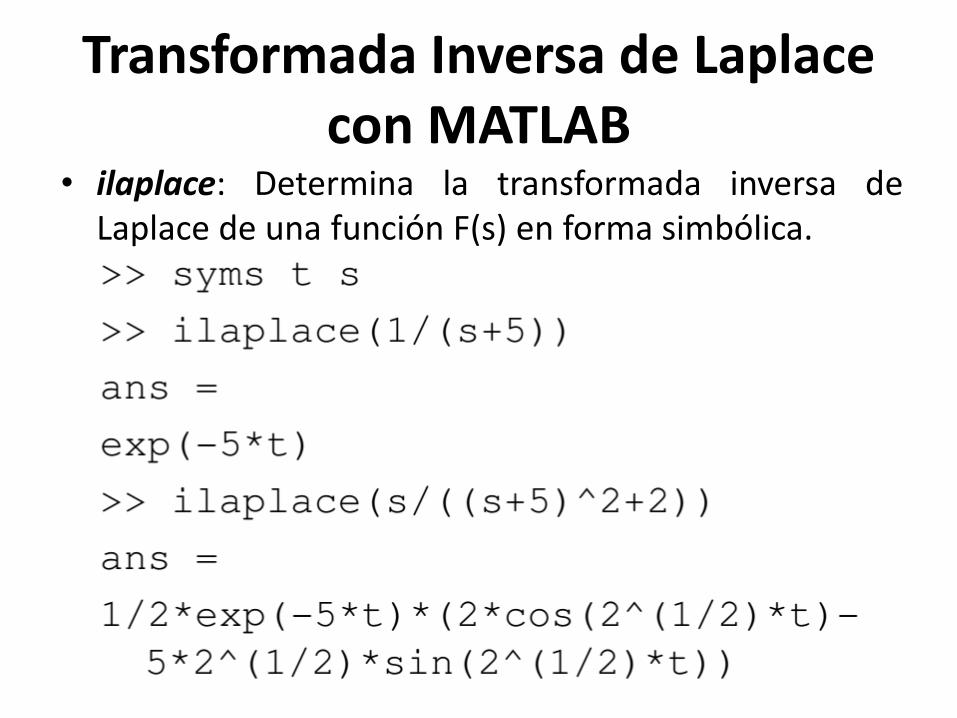
Transformada Inversa de Laplace con MATLAB
• ilaplace: Determina la transformada inversa deLaplace de una función F(s) en forma simbólica.

OTROS COMANDOS MATLAB• title: permite añadir un título a la gráfica
• xlabel: añadir una etiqueta al eje horizontal de lagráfica
• ylabel: añadir etiqueta al eje vertical
• grid: añadir una rejilla
• axis: permite modificar los límites de los ejeshorizontal y vertical
• text: añadir un texto en una posición cualquiera de lagráfica
• gtext: igual que text pero permite seleccionar laubicación del texto mediante el ratón.
• freqs: Transformada de Laplace
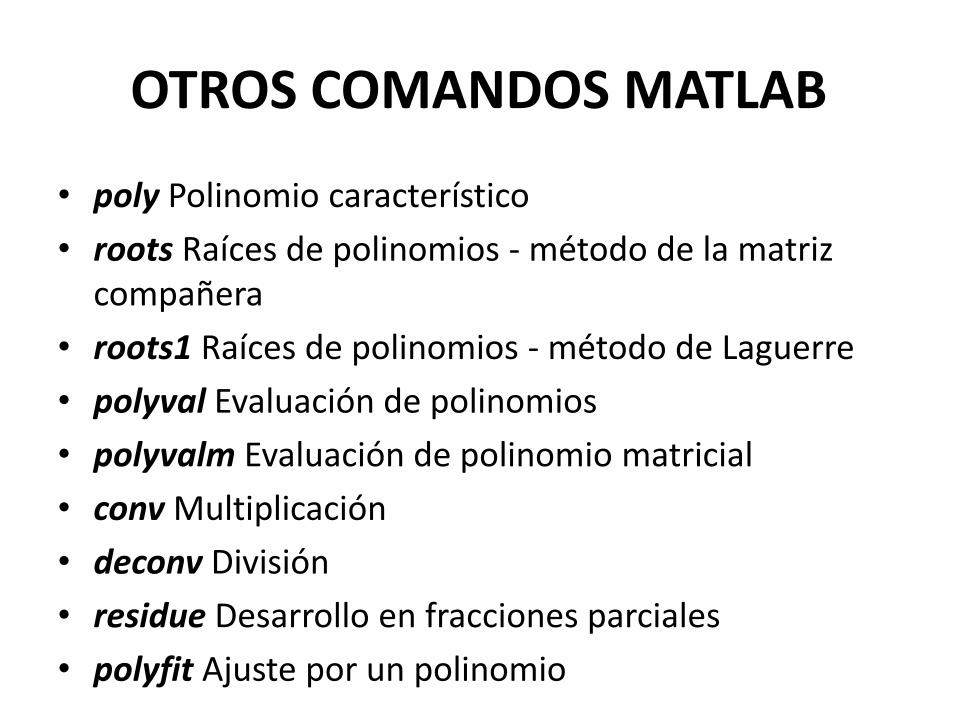
• poly Polinomio característico
• roots Raíces de polinomios - método de la matriz compañera
• roots1 Raíces de polinomios - método de Laguerre
• polyval Evaluación de polinomios
• polyvalm Evaluación de polinomio matricial
• conv Multiplicación
• deconv División
• residue Desarrollo en fracciones parciales
• polyfit Ajuste por un polinomio
OTROS COMANDOS MATLAB
SOLUCIÓN DE ECUACIONES DIFERENCIALES LINEALES E INVARIANTES CON EL TIEMPO.
• Se toma la transformada de cada término dela ecuación diferencial determinada
• Se convierte la ecuación diferencial en unaecuación algebraica en “s”
• Se obtiene la expresión para la transformadade Laplace de la variable dependientereordenando la ecuación algebraica.
• La solución en el tiempo de la ecuacióndiferencial se obtiene encontrando latransformada inversa de Laplace de lavariable dependiente.
Implica lo siguiente:
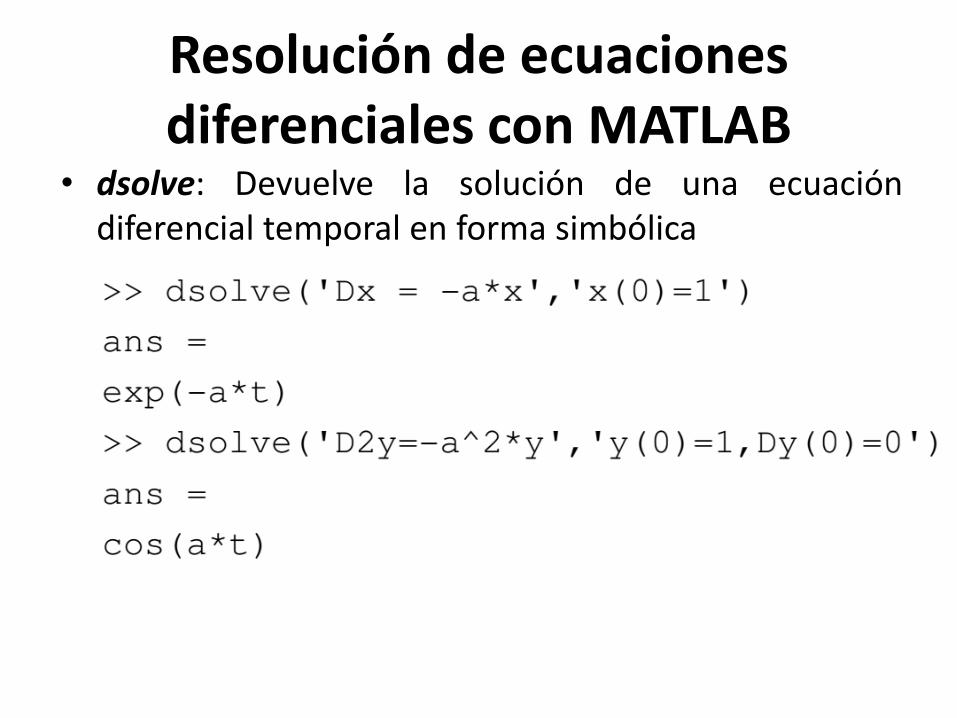
Resolución de ecuaciones diferenciales con MATLAB
• dsolve: Devuelve la solución de una ecuacióndiferencial temporal en forma simbólica

REPRESENTACIÓN DE SISTEMAS DE CONTROL
Mag. Ing. FIDEL HUMBERTO ANDÍA GUZMÁN

FUNCIÓN DE TRANSFERENCIA
• Asumiendo condiciones iniciales nulas en el sistema:
• Aplicando transformada de Laplace:
• La función de transferencia es la razón entre la transformada de Laplace de la salida y la transformada de Laplace de la entrada, considerando condiciones iniciales nulas
)t(ubdt
)t(udb)t(ya
dt
)t(yda
dt
)t(ydm
m
mn
n
nn
n
001
1
1
)s(Ub)s(Usb)s(Ya)s(Ysa)s(Ys m
m
n
n
n
00
1
1
0
1
1
0
)(
)(
)(
)()(
asas
bsb
sD
sN
sU
sYsG
n
n
n
m
m

ALGUNAS DEFINICIONES PERTINENTES
• Grado relativo: es la diferencia en grados n -m entre numerador y denominador.
• Función transferencia propia: si m n.
• Función transferencia estrictamente propia: si m < n.
• Función transferencia bipropia: si m = n.
• Función transferencia impropia: si m > n.

FUNCIÓN DE TRANSFERENCIA DE SISTEMAS CON RETARDO
• Estrictamente, estos sistemas tienen dimensión infinita. La función transferencia de un retardo de T segundos es de la forma:
• Ejemplo: Sistema intercambiador de calor.- La función transferencia es de la forma:
)Tt(u)t(ye)s(G sT
1
s
Ke)s(G
sT

COMANDOS PARA ESCRIBIR FUNCIONES DE TRANSFERENCIA
• En matlab las funciones de transferencia se introducen dando elpar de polinomios numerador denominador:
• Ejemplo. Sea la función de transferencia:
𝐻 𝑠 =−2𝑠2 + .3𝑠 + 1
(𝑠2 + .4𝑠 + 1)(𝑠 + .5)
– num = [.2 .3 1];
– den1 = [1 .4 1];
– den2 = [1 .5];
• Para obtener el polinomio resultante se usa el producto deconvolución (o de polinomios).
– den = conv(den1,den2)
• Para ver los polos (o los ceros) de la función de transferencia,podemos usar: roots(den) (roots(num)).
COMANDOS PARA ESCRIBIR FUNCIONES DE TRANSFERENCIA
• Una forma más completa de convertir una función detransferencia dada por dos polinomios numerador y denominador,en un conjunto de factores de grado 1, correspondientes a lospolos y ceros es mediante el comando tf2zp:
– [ceros,polos,gan] = tf2zp (N,D);
– que devuelve un vector conteniendo los ceros de la función detransferencia, un vector conteniendo los polos, y un escalarcorrespondiente a la ganancia estática.
• La función complementaria a ésta también existe:
– [N,D] = zp2tf (ceros,polos,gan);

DIAGRAMAS DE BLOQUES
• Capturan la esencia del sistema en un formalismo gráfico abstracto de simple manipulación.

ELEMENTOS DEL DIAGRAMA DE BLOQUES
• Bloque funcional, Punto Suma y Punto de ramificación:
Función de
Transferencia
G(s)

• Funciones de transferencia de distintas configuraciones
• Función de Transferencia en lazo abierto:
• Función de transferencia de la trayectoria directa:
• Función de transferencia en lazo cerrado.-
)s(H)s(G)s(E
)s(B
)s(G)s(E
)s(C
)s(R)s(H)s(G
)s(G)s(C
1

• Sistema en lazo cerrado sujeto a una perturbación.-
– Entonces:
)s(H)s(G)s(G
)s(G
)s(D
)s(CD
21
2
1
)s(H)s(G)s(G
)s(G)s(G
)s(R
)s(CR
21
21
1
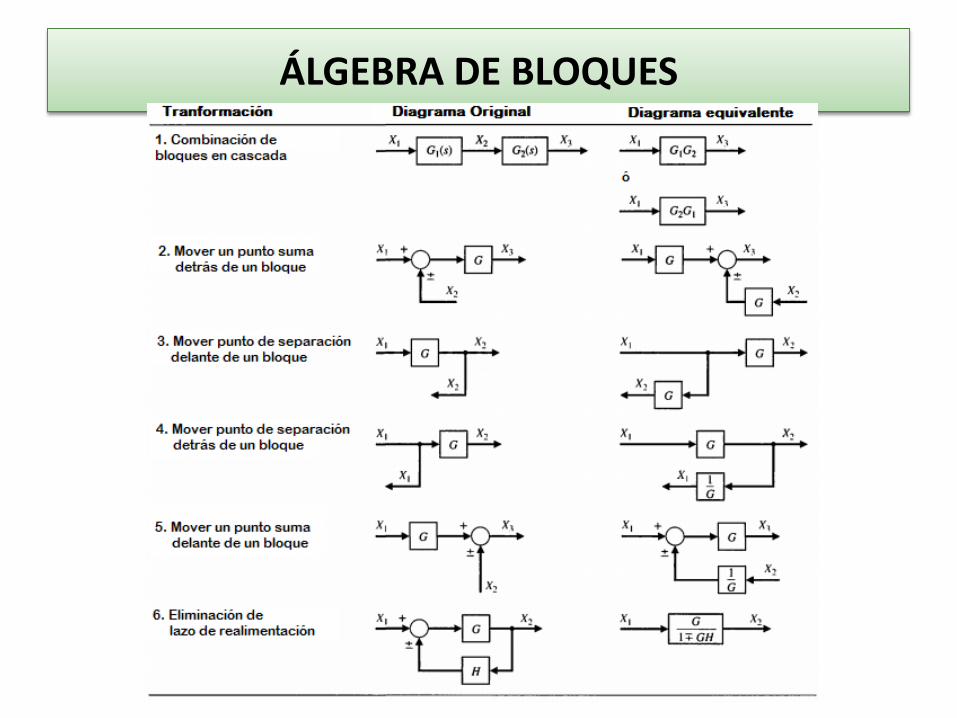
ÁLGEBRA DE BLOQUES
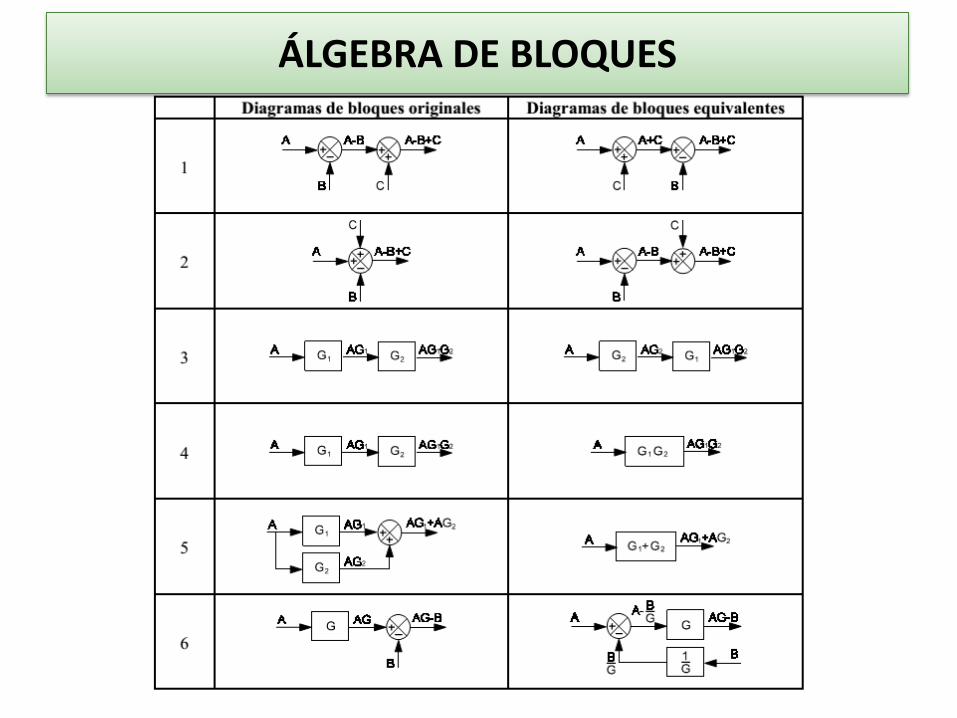
ÁLGEBRA DE BLOQUES

ÁLGEBRA DE BLOQUES
ALGUNOS COMANDOS MATLAB
• tf2zp: Conversión de función de transferencia arepresentación polo-cero
• zp2tf: Paso de representación polo-cero a función detransferencia.
• cloop: Calcula el bucle cerrado de un sistema
• connect: Modelado con diagrama de bloques
• feedback: Conexión de sistemas realimentados
• parallel: Conexión de sistemas en paralelo
• series: Conexión de sistemas en serie

Comandos relacionados con operaciones de bloques
• [N12,D12] = series (N1,D1,N2,D2): Devuelve laresultante de colocar en serie dos funciones detransferencia. El mismo resultado podría obtenersellamando dos veces al comando conv, que permitemultiplicar dos polinomios.
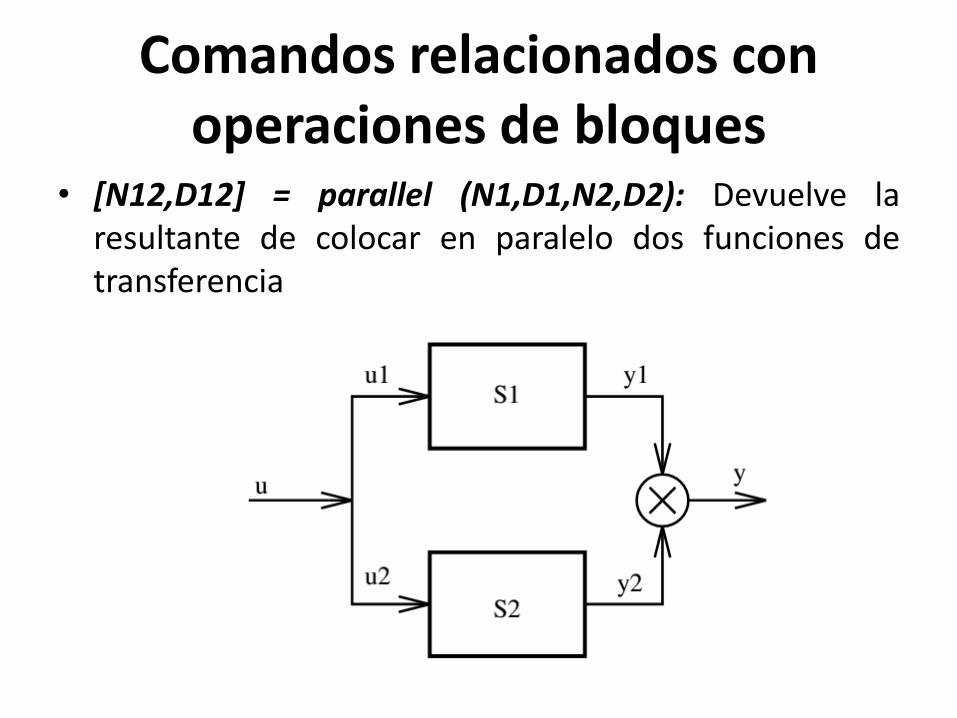
Comandos relacionados con operaciones de bloques
• [N12,D12] = parallel (N1,D1,N2,D2): Devuelve laresultante de colocar en paralelo dos funciones detransferencia
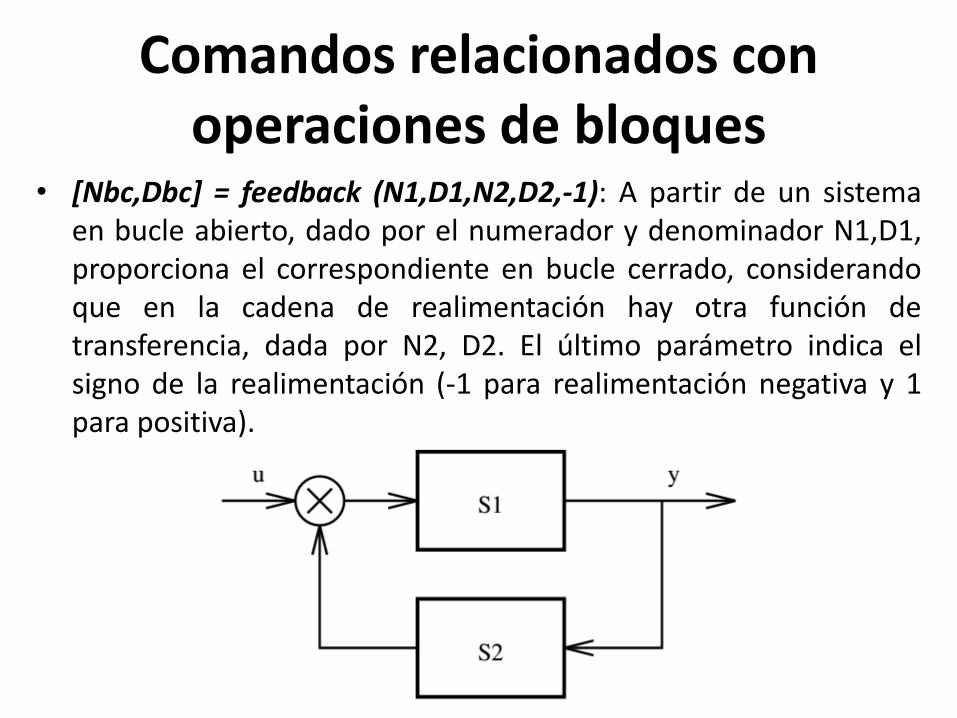
Comandos relacionados con operaciones de bloques
• [Nbc,Dbc] = feedback (N1,D1,N2,D2,-1): A partir de un sistemaen bucle abierto, dado por el numerador y denominador N1,D1,proporciona el correspondiente en bucle cerrado, considerandoque en la cadena de realimentación hay otra función detransferencia, dada por N2, D2. El último parámetro indica elsigno de la realimentación (-1 para realimentación negativa y 1para positiva).

Comandos relacionados con operaciones de bloques
• [Nbc,Dbc] = cloop (N1,D1,-1): En el caso en que sepretenda obtener la función de transferencia en buclecerrado con realimentación unitaria, puede emplearseeste comando mas compacto, en el que se evita tenerque especificar una segunda función de transferencia.

GRÁFICOS DE FLUJO DE SEÑALES
• Medio gráfico de descubrir la relación salida –entrada entre las variables de un conjunto deecuaciones algebraica.
• Útil cuando la simplificación por el álgebra debloques se hace complicado.
• la ventaja de que existe una fórmula quepermite hallar la ganancia entre dos extremos,denominada “fórmula de la ganancia deMASON”.

GRÁFICOS DE FLUJO DE SEÑALES
• DEFINICIONES IMPORTANTES:– Nodo.- Representa las variables.
– Ramas.- Líneas que conectan los nodos de acuerdo a la relaciónCAUSA – EFECTO.
– Nodo de entrada.- sólo salen ramas de él.
– Nodo de salida.- Sólo ingresan ramas a él.
– Trayectoria.- Rama o secuencia continua de ramas.
– Lazo.- Trayectoria cerrada que se origina o termina en el mismonodo.
– Ganancia de Rama.- Valor que multiplicado por la señal o sumade señales arribando al nodo de entrada, da el valor de la señalen el nodo de salida.
– Ganancia de Lazo.- Producto de todas las ganancias de lasramas que constituyen el lazo.
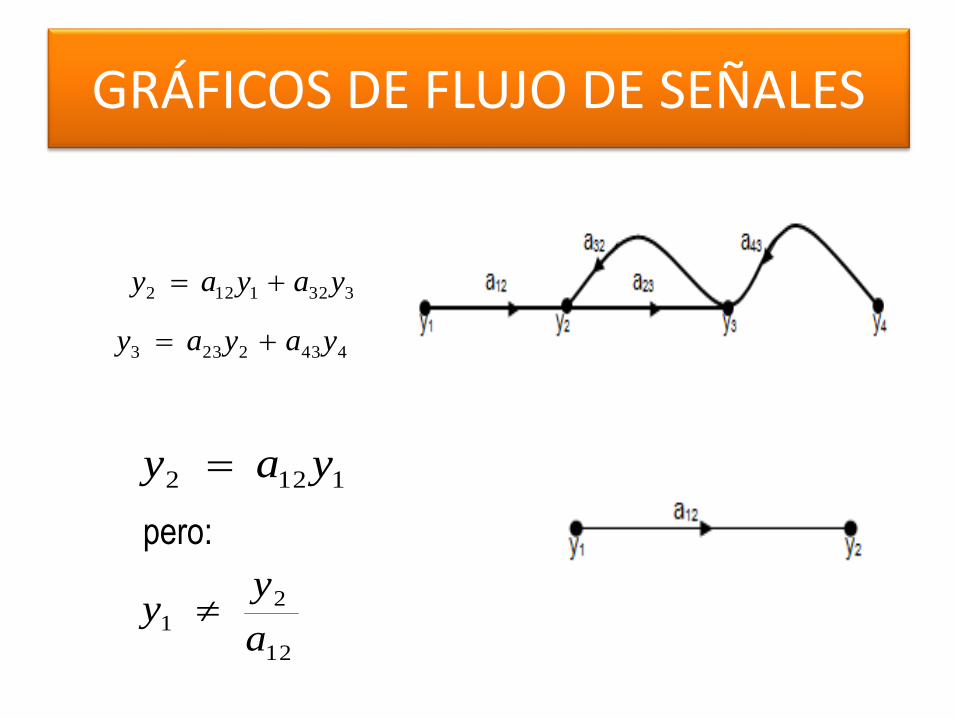
GRÁFICOS DE FLUJO DE SEÑALES
3321122 yayay
4432233 yayay
1122 yay
12
21
a
yy
pero:

GRÁFICOS DE FLUJO DE SEÑALES
GRÁFICOS DE FLUJOS DE SEÑALES.
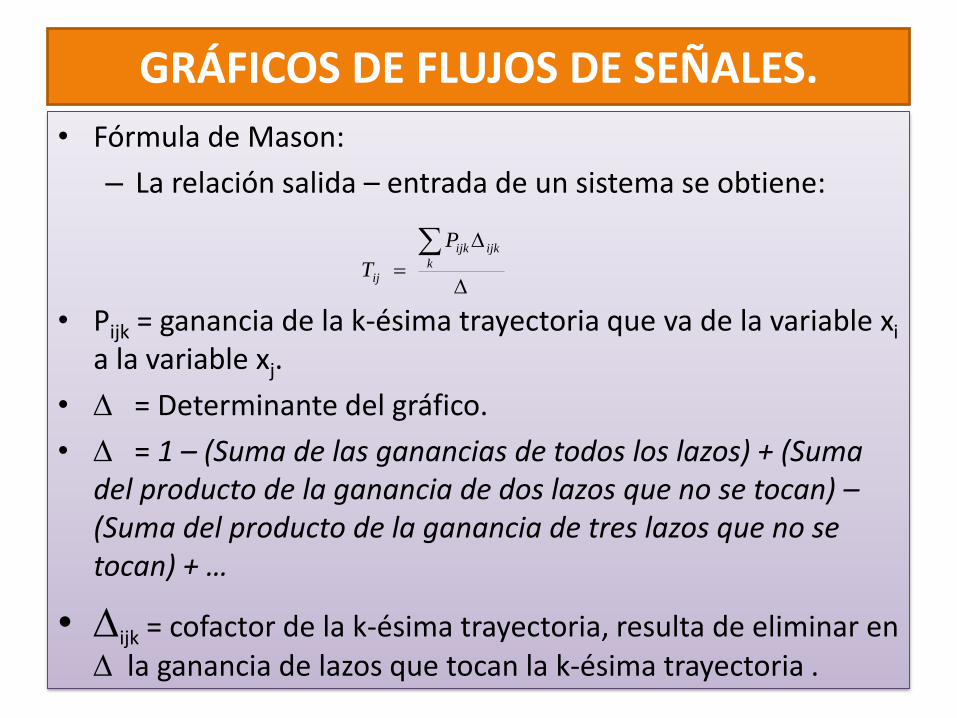
• Fórmula de Mason:
– La relación salida – entrada de un sistema se obtiene:
• Pijk = ganancia de la k-ésima trayectoria que va de la variable xi
a la variable xj.
• = Determinante del gráfico.
• = 1 – (Suma de las ganancias de todos los lazos) + (Suma del producto de la ganancia de dos lazos que no se tocan) –(Suma del producto de la ganancia de tres lazos que no se tocan) + …
• ijk = cofactor de la k-ésima trayectoria, resulta de eliminar en la ganancia de lazos que tocan la k-ésima trayectoria .
k
ijkijk
ij
P
T






























