Embed Size (px)
Citation preview

Cognitive Radio-Aware Transport Protocol forMobile Ad Hoc Networks
著者 Tsukamoto Kazuya, Koba Shun, Tsuru Masato,Oie Yuji
journal orpublication title
IEEE Transactions on Mobile Computing
volume 14number 2page range 288-301year 2015-02-01URL http://hdl.handle.net/10228/00006172
doi: info:doi/10.1109/TMC.2014.2320267

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 1
Cognitive Radio-Aware Transport Protocol forMobile Ad Hoc Networks
Kazuya Tsukamoto, Member, IEEE, Shun Koba, Non member, IEEE, Masato Tsuru, Member, IEEEand Yuji Oie, Member, IEEE
Abstract —With the proliferation of new wireless service, scarce wireless resources is expected to become a critical issue. Forthis reason, cognitive radio mobile ad hoc networks (CogMANET) are being developed as a promising solution to this problem.However, in CogMANET, channel switching is inherently necessary whenever a primary user with a license appears on thechannel. Allowing secondary users to choose an available channel from among a wide spectrum range thus enables reliablecommunication in this context, but communication characteristics such as bottleneck bandwidth and RTT will change with channelswitch. In response to this change, TCP has to adaptively update its congestion window (cwnd) to make an efficient use of theavailable resources. For this purpose, TCP CRAHN was proposed for CogMANET. In this paper, TCP CRAHN is first evaluatedin cases where bottleneck bandwidth and RTT drastically change. Based on these results, TCP CoBA is proposed to furtherimprove the throughput of the above use cases. TCP CoBA updates the cwnd based upon the available buffer space in the relaynode upon channel switch, as well as other communication characteristics. Through simulations, we show that compared withTCP CRAHN, TCP CoBA improves the throughput by up to 200%.
Index Terms —Transport Protocol, Cognitive Radio, Mobile ad hoc network, Multi-hop communication
✦
1 INTRODUCTION
Cognitive radio technology has the potential to ame-liorate the scarcity of wireless resources because un-licensed users (secondary users: SUs) can use wire-less resources only if they have no impact on theoperations of licensed users (primary users: PUs). Inthe future, cognitive radio mobile ad hoc networks(CogMANET) will be constructed from many mobileSUs connected to each other in a distributed manner,which can be deployed for various applications, in-cluding intelligent transport systems (ITS).
A promising way to improve not only the surviv-ability but also the reliability of communication inCogMANET is to allow SUs to select a communicationchannel (channel) satisfying their application require-ments from a wide range of spectrum. However, sinceSUs always need to guarantee no impact on PU per-formance, they have to engage in periodical sensing todetect PUs, and then switch channels whenever a newPU appears. Hence, communication in CogMANET islikely to experience changes in characteristics in termsof bottleneck bandwidth and round-trip time (RTT)due to channel switching. In such case, in responseto channel change, TCP has to adaptively updateits window size (wnd) to achieve an efficient use ofavailable wireless resources. It is assumed that thewnd is determined by the congestion window (cwnd)
• K. Tsukamoto is with the Dept. of Computer Science and Electronics,Kyushu Institute of Technology, Iizuka, Fukuoka, Japan, 820-8502.E-mail: [email protected]
• S. Koba, M. Tsuru and Y. Oie are with Kyushu Institute of Technology.
This study was supported in part by the JSPS KAKENHI (25330107).
only because of a large advertised window (awnd).In this context, TCP CRAHN was proposed as
a TCP variant for CogMANET [12]. Except for thefeatures of channel switching and periodical sensing,TCP CRAHN’s congestion control is completely samewith those of existing TCP (TCP NewReno). When achannel is changed, TCP CRAHN’s congestion controluses information sent by relay nodes (see Table 2), asis the case of XCP [11]. If the relay node changes itschannel, it will inform the TCP sender of when tobegin and finish changing as well as the bandwidthand link delay of two neighboring nodes (i.e., a newchannel link). After receiving this information, theTCP sender updates cwnd appropriately. This is thekey function required in CogMANET. However, thisscheme assumes that each node engages in periodicalsensing, the timing and duration of periodical sensingare totally controlled by the TCP sender. For thatpurpose, the TCP sender sends a message to the nodeson the routing path. This may not be scalable, asthe nodes have to accommodate multiple flows fromdifferent TCP senders.
Furthermore, it is assumed that SUs are allowedto use some wide range of the spectrum, such as400 MHz to 6 GHz [18], in a future CogMANET, forspectrum efficiency. However, this can cause drasticchanges in bottleneck bandwidth and RTT when anode changes its channels. Therefore, TCP CRAHN isfirst evaluated when bottleneck bandwidth and RTTdrastically change in CogMANET, exposing some is-sues to degrade throughput performance. Next, a newTCP that solves the related issues identified above isdeveloped. Our contributions are described below.

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 2
• Performance degradation, caused by drasticchange in bottleneck bandwidth and/or RTTwhen channel switching, can be avoided ef-fectively by updating the cwnd appropriatelythrough collaborative work with relay nodes.
• Each of multiple TCP CoBA flows can achieve afair share of the network resources.
2 TARGET NETWORK
The target network is multihop communication inCogMANET. It is assumed that different channels areused in each hop so that communication of each hopdoes not interfere with each other. Communication inCogMANET is likely to suffer from changes in char-acteristics due to channel switching and interruptionscaused by periodical sensing. In this study, channelcharacteristics, such as bandwidth and transmissioncoverage area of channel, are changed as a resultof channel switching, because it is assumed that thenodes select a channel from a wide range of thespectrum, such as 400 MHz to 6 GHz. Therefore, end-to-end communication characteristics such as bottle-neck bandwidth and RTT may change. The evaluationfocuses on TCP performance when bottleneck band-width and RTT are changed drastically.
In practice, SUs have to sense whether PUs are com-municating on their licensed channel, where SUs areassumed to use energy detection (ED) as the sensingtechnology. ED provides high speed processing butless sensitivity. Since ED cannot distinguish betweenPUs and SUs, each SU in CogMANET synchronouslyexecutes sensing and data transmission in sequenceperiodically in a time-division manner. That is, thesignal received during the sensing period indicatesPUs’ signal. To achieve this in TCP CRAHN, the TCPsender sends a message to adjust the timing andduration of periodical sensing to nodes on the routingpath. On the other hand, if the Global PositioningSystem (GPS) function is assumed to be available foreach SU, the SU can synchronously execute periodi-cal sensing. This can result in frequent interruptionsin ongoing communication. Conversely, each nodecannot execute sensing during the data transmissionperiod, which has the potential to interfere with PUcommunication. Furthermore, to switch a channelused between two adjacent nodes, exchange of sometype of control messages is necessary. Thus, datatransmission is interrupted during channel switchingas well. As can be seen above, communication inCogMANET suffers from frequent interruptions dueto periodical sensing and channel switching. Notethat, in this paper, packet losses on wireless links donot occur since the goal is to focus on the impact ofcognitive radio only.
3 RELATED WORK
A large number of TCP variants has been developedto achieve high performance in various contexts. This
section will summarize the main state-of-the-art TCPfrom the perspective of multihop cognitive networks.
3.1 Transport protocol for a 1-hop cognitive radio
In [1], [2], [3], [4], the performance of conventionalTCPs in a cognitive radio environment was found tobe significantly degraded because of frequent inter-ruptions due to sensing and channel switching.
On the other hand, TCP Westwood [5] preventsperformance degradation due to random losses inthe last 1-hop wireless environment. When packetlosses are detected, the sender updates ssthresh tothe calculated bandwidth-delay product (BDP) basedon the estimated bandwidth and the minimum RTTin ongoing communications, thereby avoiding excessreduction of the cwnd. Although in [5], the interval ofreceiving time of two consecutive ACKs is utilized toestimate bandwidth, the bandwidth is overestimatedwhen the ACK interval is reduced due to ACK filter-ing and so on. To solve the problem, TCP Westwood+[6] was proposed. In [6], the bandwidth is estimatedbased on both the amount of data acknowledgedby receiving the latest ACK and the calculated RTT.Moreover, moving average is employed to smooththe estimated bandwidth, thereby improving the es-timation accuracy of Westwood+. Since these TCPswere not developed for use in cognitive radio envi-ronments, it underestimates the bottleneck bandwidthbecause it ignores the interruptions caused by pe-riodical sensing. To resolve this issue, cogTCPE [9],which is based on Westwood(+), was proposed forthe last 1-hop cognitive radio environment. With thisTCP, the estimation of bandwidth by Westwood isenhanced. The cwnd is also computed using mes-sages exchanged between end nodes only. However,when cogTCPE is used for multihop communicationin CogMANET, it cannot detect channel switchingat the relay nodes. In this case, the Layer 2 (L2) inswitching nodes successfully switches a channel, butcogTCPE continues to send segments even duringchannel switching, thereby causing buffer overflow inthe switching nodes. For this reason, cogTCPE cannotefficiently use wireless resources, because cwnd is notupdated after channel switching at the relay nodes.
In addition, [10] targets multihop communication inmesh networks with cognitive radio. The authors pro-pose a multichannel MAC protocol that can improvethe TCP throughput, without modifying TCP.
3.2 Transport protocol for MANET
ATP [7] and ATCP [8] are proposed for multihopcommunication in MANET. ATP [7] is not a variantof TCP, but a rate-based transport protocol. ATP ob-tains network congestion information, which is firstattached to each ATP packet by the relay nodes and isthen received and sent back to the sender by the ATPreceiver. By using this information, the ATP sender

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 3
can adjust its transmission rate. In contrast, ATCP [8]is fully compatible with the traditional TCP. ATCPrelies on a network layer feedback to make the TCPsender aware of the status of network path, so thatsupport of ATP is required for the sender only. Indeed,among the feedback information, explicit congestionnotification (ECN) flags and ICMP destination un-reachable messages enable the TCP sender to detectnetwork congestion and path disruption, respectively.
In this way, these TCP variants use specializedcontrol messages transmitted from relay nodes, forexample, feedback control. Feedback control in ATPand ATCP is used to determine the cause of packetloss and avoid performance degradation as a resultof inappropriate congestion control. However, theseapproaches do not detect channel switching in theCogMANET environment. Therefore, they continue tosend segments during channel switching, leading tobuffer overflow in the switching node. As a result,they cannot efficiently use wireless resources due toinappropriate cwnd sizing.
3.3 Transport protocol for CogMANET
To the best of our knowledge, existing transportprotocols that support multihop communication inCogMANET are TCP CRAHN [12] and TFRC-CR [13]only. TFRC-CR maintains the end-to-end principle,which does not need both of feedback informationfrom relay nodes and cross-layer collaboration withlower layers, whereas TCP CRAHN needs both ofthem, that is, the end-to-end principle is broken.
In [13], since all nodes in CogMANET could ex-perience drastic changes in communication perfor-mance due to PU appearance and channel switching,the authors pointed out that handling the frequentchanges is difficult when using a RTT-based self-clocking mechanism (as in the regular TCP) and theincrease in the amount of feedback information couldcause performance degradation by 20%. To solve theseissues, the authors propose a new transport proto-col based on TFRC (TFRC-CR), which shows stableperformance in CogMANET. Note that the sender ofTFRC-CR is assumed to be able to obtain variousinformation such as which channel on the en-to-endpath is used by PU, through the whitespace Database(DB) authorized by FCC.
So far, the standardization process of whitespace DBhas not been finalized yet. In particular, in terms of theDB access, its radio frequency and access proceduresare not fixed yet. Furthermore, access latency may be-come large due to traffic congestion and/or variationof wireless link quality, so that quick and appropriatecontrol of data transmission while considering PUsignal will be extremely difficult.
On the other hand, since sensing only devices stillremain in FCC regulations, this type of devices wouldbe deployed and could not be negligible. Moreover,
we believe that a dedicated control channel shared byneighbor nodes can avoid performance degradationeffectively, even when access to the DB is not availabledue to the congested traffic of access messages and/orthe variation of wireless condition [14]. Therefore,in this paper, we focus on TCP CRAHN in whicheach node executes periodical sensing without theuse of DB. Note that TCP CRAHN is based on TCPNewReno, so that the existing applications employingconventional TCP can be used.
3.4 TCP CRAHN
TCP CRAHN [12] was proposed as a transport proto-col for multihop communication in CogMANET. ThisTCP variant adaptively updates cwnd in response tochanging communication characteristics due to chan-nel switching at relay nodes.
3.4.1 Sensing methodCRAHN uses ED as the sensing technology. EachSU performs sensing and data transmission processesin an asynchronous time-division manner. Therefore,CRAHN modifies the three-way handshake processin NewReno such that the TCP sender can obtainthe sensing schedules of all nodes on the routingpath. Furthermore, the TCP sender sends messagesto adjust the timing and duration of sensing to thenodes on the routing path during TCP communica-tion. However, it may happen that a node receivesmessages from more than one TCP sender, whichwill cause the node to require different schedules forsensing. Such a situation is not considered in [12],which limits the scalability of this solution.
3.4.2 Response to interruptionsAs noted in Section 2, end-to-end communication maysuffer from frequent interruptions because the nodescannot send data packets during periodical sensing. Inaddition, once the node begins to switch channel, itstops data transmission until the completion of chan-nel switching. Packet arrivals to the node during thechannel switching can result in buffer overflow in thenode. Hence, the relay node informs the TCP senderof the start and the end of channel switching. The TCPsender stops sending TCP segments once the startof channel switching is notified. After that, CRAHNfreezes the retransmission timeout (RTO) timer soas to avoid timeout during channel switching. TheTCP sender restarts the RTO timer after receivingnotification of end of channel switching.
3.4.3 Response to changes in communicationcharacteristicsIn CRAHN, nodes switching their channels measurecommunication characteristics (link bandwidth W ,link delay LT ) and send back related information tothe TCP sender. When the TCP sender receives the

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 4
TABLE 1Communication parameters
Simulation time 50 sNumber of trials 30Segments size 1460 bytesL4 buffer size 1000 packetsL2 buffer size 100 packetsData transmission period 1.0 sSensing period 0.5 sAvg. of PU com. period 3.0 sPon 0.5channel switching time 0.5 s
channel i: ch i(0 s - 50 s)Flow 1
ch1 ch2 ch4switch
ch3
ch3’node1 node2 node3 node4 node5
Fig. 1. Simulation topology
information, the bottleneck bandwidth (W ′b) is calcu-
lated using this information. When W ′b is changed
by over 20% relative to the value before channelswitching, the sender updates cwnd and RTT fromEqs. (1) and (2). L′T is the link delay before channelswitching. In addition, α in Eq. (2) is 1 or less1 becausethe updated cwnd is intentionally limited to less thanthe cwnd limit [15].
RTTnew = RTTold + LT − L′T (1)cwnd = α ·W ′
b ·RTTnew (2)
4 EVALUATION OF EXISTING SCHEMES
Some of TCP variants described in the previous sec-tion, TCP NewReno, Westwood+, and CRAHN, willbe examined below in terms of their throughput per-formance in CogMANET.
4.1 Simulation Model
Simulations are performed using Qualnet 4.5, withparameters given in Table 1. In Qualnet 4.5, we usedstandard codes for NewReno. However, since no offi-cial support on Westwood+ and CRAHN is provided,we implemented these protocols and used them. L4buffer size of end nodes is 1000 packets, so that it isconsiderably larger than BDP, while L2 buffer size ofeach node is set to 100 packets 2. Furthermore, the
1. In Ref. [12], α is 0.8 because each node stores packets frommultiple flows. In the present study, α is set to 1 since only a singleflow is considered.
2. Reference [16] investigated L2 buffer size on several types ofwireless APs. It was shown that commercial APs have a bufferwhose size varies from 50 to 350 packets and residential APsvary from 40 to 100 packets. In the present paper, it is assumedthat mobile nodes, which are not superior in their performanceto commercial APs, are used as nodes. Therefore, L2 buffer sizeon each node is set to 100 packets in consideration of futureperformance improvement of mobile node.
sensing period is fixed to 0.5 s using Eq. (3) in [17] toprevent the probability of PU misdetection Pf frombecoming larger than 5%. W is the channel spectrumbandwidth [Hz] and γ is the external signal to noiseratio (SNRdb[dB] = 10 log10 γ). Furthermore, Pon is theprobability that a PU is in a communication period;Poff = 1− Pon, and Q is the standard Q function.
ts =1
W · γ2
[Q−1(Pf ) + (γ + 1)Q−1
(PoffPf
Pon
)]2(3)
W was set to 2 MHz, and SNRdB was set to −25dB [12] since signal quality deteriorates due to nodemobility. Moreover, Pon was set to 0.5, i.e., Poff = 0.5.
We assume communication on CogVANET in whichPU appears frequently. Thus, we set the average of PUcommunication period to 3.0 s and set Pon to 0.5.
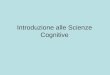
The simulation network is shown in Fig. 1, in whichnode 1 sends bulk data to node 5. Channels 3 and 3’are available between nodes 3 and 4, one of which ischosen in a way to avoid interference to PU commu-nication. Channel 3’ is assumed not to be used for asingle hop, but to be composed of several channelsfor multihop communication between nodes 3 and 4.Therefore, link delay of Channel 3’ is set to be largerthan that of Channel 3. In this paper, we assume thatchannel switching at some link causes the change inthe number of hops between end nodes, which in turnchanges the link delay of multiple hops, so that weemulate it by changing link delay. Furthermore, sincethe bandwidth over multiple hops may be changed,we varied the bandwidth from 20 Mb/s to 60 Mb/s.
The focus of the simulations is on the status of PUcommunication. When a PU is present on both Chan-nels 3 and 3’ simultaneously, communication betweennodes 3 and 4 is disconnected. Therefore, it is assumedthat the PU uses Channel 3 only. These nodes switchfrom Channel 3 to 3’ quickly after detecting the PUon Channel 3. On the other hand, these nodes switchback from Channel 3’ to 3 when the PU on Channel 3ceases communication. The PU communication periodfollows an exponential distribution with a mean 3s. Furthermore, communication performance of boththe PU and the SU inevitably degrades when the SUinterferes with the PU. However, this problem is outof consideration as we focus on how the changes incommunication characteristics impact on throughputperformance of the SU. Furthermore, cwnd and theaverage throughput are used as a performance mea-sure. The average throughput is defined as the time-averaged TCP goodput (from 10 s after communica-tion has begun) averaged over 30 runs.
4.2 Impact of changes in both the bottleneckbandwidth and RTT caused by channel switching
In this section, the case where both RTT and band-width change due to channel switching is considered.

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 5
channel i: ch i(0 s - 50 s)Flow 1
20 ~ 60Mb/s, 20ms
100Mb/s, 0.5ms
100Mb/s,0.5ms
100Mb/s, 0.5ms
10Mb/s, 0.5ms
ch1 ch2 ch4switch
ch3
ch3’
node1 node2 node3 node4 node5
(a) The topology and parameters 0
50
100
150
200
250
300
350
10 15 20 25 30 35 40 45 50 0
10
20
30
40
50
60
70
80
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)cwnd
(b) cwnd (BW of Channel 3’ is 60 Mb/s)
0
5
10
15
20
25
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 3’ Rate [Mb/s]
Upper boundNewReno
Westwood+CRAHN
(c) Averaged throughput
Fig. 2. Impact of the changes on both the bottleneck bandwidth and RTT by channel switching
As shown in Fig. 2a, link delay of Channel 3 is 0.5ms, and that of Channel 3’ is 20 ms, so that RTTis significantly changed after channel switching. Inaddition, it is assumed that SUs select a channel froma wide spectrum, so that bandwidth of Channel 3’varies from 20 Mb/s to 60 Mb/s.
Fig. 2b illustrates the cwnd of CRAHN when thebandwidth of Channel 3’ is 60 Mb/s. The cwnd wasupdated to a large value when node 3 switched fromlow-rate Channel 3 to high-rate Channel 3’. After that,a too large cwnd immediately after channel switchingcauses buffer overflow at the relay node, therebyresulting in a drastic decrease in the cwnd. In CRAHN,TCP sender calculates cwnd based on BDP (Eq. (2)).
Fig. 2c shows the average throughput of all TCPvariants when the bandwidth of Channel 3’ ischanged. The performance difference between an up-per bound and throughput of all TCP variants in-creases with the bandwidth of Channel 3’, whichis the bottleneck bandwidth. Note that the upperbound is an achievable maximum throughput ob-tained by transmitting UDP packets. As mentionedearlier, CRAHN increases the cwnd up to a too largevalue by Eq. (2) compared with the available bufferspace of the relay node when both link delay andbandwidth are increased, thereby causing buffer over-flow. On the other hand, both NewReno and West-wood do not update cwnd at all after channel switch-ing. Thus, NewReno and Westwood cannot make anefficient use of available bandwidth if the bandwidthis increased due to channel switching. CRAHN dy-namically changes its cwnd by using changing BDP.However, Fig. 2b shows that it can excessively in-crease its cwnd compared with available buffer spaceof relay node when the bandwidth increases drasti-cally. This results in throughput performance degra-dation as shown in Fig. 2c.
The solution to this issue is to adjust appropriatelythe cwnd based upon the available buffer space of thebottleneck, if necessary, in addition to BDP. Further-more, the change in RTT should also be considered forupdating BDP, although CRAHN does not. Therefore,we will propose a new TCP which solves this issuein the following section.
5 TCP COBABased on the evaluation presented in Section 4, thissection proposes TCP CoBA as a new transport pro-tocol. Behavior of TCP CoBA is completely samewith that of TCP NewReno except for the period ofchannel switching, as in the TCP CRAHN. Note thatwe assume that each SU can synchronously executeperiodical sensing by exploiting GPS function.
CoBA is proposed to achieve high performance byupdating the cwnd appropriately in response to thechange in the bottleneck bandwidth (Wb) and RTT.Hence, CoBA also updates the cwnd when the RTT ischanged by over 20% due to channel switching, whichis different from CRAHN. CoBA freezes data trans-mission and RTO timer during the channel switchingas in CRAHN.
5.1 Feedback information
First, a sender of TCP CoBA can get various infor-mation from each relay node. Relay nodes send theinformation in the following four cases: (1) three-wayhandshake, (2) forwarding of data packet, (3) start ofchannel switching, and (4) end of channel switching.The information sent in each case is listed in Table 2,where BWi is the bandwidth on link i, LT
i,i+1 is the1-hop RTT between neighboring two nodes (nodes iand i + 1), and BFi is the remaining buffer space innode i. These parameters are obtained from layer 2 3.Since the information of bandwidth (BWi) and latency(LT
i,i+1) for each link are inserted in the TCP header ofall relaying packets, these information can be knownby TCP sender. Therefore, TCP sender also grasps thebottleneck bandwidth (Wb) by BWi of all links.
The relay node returns a layer 3 packet includingfeedback information of new link bandwidth and newlatency immediately after channel switching, so thatthe TCP sender on layer 4 can quickly recognize anew latency (L′T
i,i+1) and a new bandwidth (BW ′i )
as well as where the bottleneck node is located andhow much its bandwidth is (W ′
b). In addition, CoBA
3. BWi and BFi can be obtained from driver software of radiointerface. Furthermore, we assume that LT
i,i+1 can be obtainedby measurement packet exchange between neighboring two nodes(i, i+ 1), as in the TCP CRAHN.

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 6
uses feedback information on the remaining bufferspace transmitted from a relay node having changedits channel in order to prevent buffer overflow. Notethat, for ease of implementation, it is assumed that thefeedback information is available only from a nodechanging its channel.
When multiple TCP flows coexist, BWi
(Num.offlows)
and BFi
(Num.offlows) are informed by a nodeexperiencing channel switching. TCP senderupdates the amount of transmitted data tomin( BWi
(Num.offlows) ,BFi
(Num.offlows) ), thereby preventingbuffer overflow even under a case of multipleTCP flows. Moreover, when bi-directional flowscoexist, each of the two neighboring nodesexperiencing channel switching sends back thefeedback information to the TCP sender, so that eachof the TCP senders adjusts the transmission rate tothe appropriate value based on the updated cwnd(described later). As a result, we can say that theCoBA can provide good communication performancebetter than that for CRAHN, irrespective of directionof multiple flows. Note that, for ease of mathematicalexpressions, the information in case of single floware hereinafter assumed.
5.2 Discussion for feedback-based method
Since the sender node of TCP CoBA receives feed-back information transmitted from relay nodes afterchannel switching, the end-to-end principle cannot beapplied to CoBA, as in the CRAHN. Collaborativecontrol between sender node and relay nodes requiresan exchange of control message, thereby increasingnot only computational load but also message over-head in the network. As a result, communicationperformance may degrade.
In CogMANET, all nodes could experience drasticchanges in communication performance due to ap-pearance of PU signal and channel switching, so thattransmission control with the end-to-end principle isextremely difficult. In such case, this collaborativecontrol provides relatively stable communication inspite of possible drawbacks mentioned earlier. There-fore, we propose a new transport protocol based oncollaborative control, as in CRAHN.
It may happen that the feedback information getslost in real wireless environment. To prevent this fromcausing severe performance degradation, we designthe control of CoBA to be completely same with thatof NewReno, except for in the channel switching. Thatis, CoBA ensures that negative impact by introducingCoBA can be limited extremely.
5.3 Procedures for cwnd updates
The method used to update cwnd and ssthresh whennode i changes its channel (see Fig. 3) is outlined inFig. 4 and explained below.
PU
channel switchingbottleneck node ;
bandwidth: BW
(source)node 1 node i-1
(destination) node Nnode i node i+1
link i-1 link i・・・ ・・・
Fig. 3. Scenario of channel switching
TABLE 2Feedback information from relay nodes
Timing CRAHN CoBA(1) 3 way handshake timing of sensing
duration of sensing(2) relaying of data/ack BWi, LT
i,i+1
(3) switching start time at start of switching(4) switching end time at end of switching
BW ′i : BWi after swiching
L′Ti,i+1: LT
i,i+1 after switchingBFi
When a relay node changes its channel if PU com-munication is detected, its bandwidth and link delay(LT
i,i+1) can also be changed. This change is dras-tic when the bottleneck bandwidth or RTT changes.Therefore, in response to a change of more than 20% inthe bottleneck bandwidth or RTT, CoBA appropriatelyupdates its congestion control parameters, cwnd andssthresh, using the feedback information receivedfrom the relay node4.
We can categorize cases of where the bottlenecknode is located into two cases, depending on whetherthe remaining buffer space at the switching nodeshould be considered or not. The first case is that thebottleneck node is located on a path from the TCPsender to node i, in which even in the bottlenecknode, the buffer will be empty by the end of chan-nel switching because the TCP sender stops sendingpackets during channel switching. In this case, BDPis thus good enough for updating cwnd. The secondcase is that the bottleneck node is just the switchingnode or located forward of it. In this case, cwnd shouldbe limited to not allow excessive consecutive packettransmissions by using the remaining buffer spaceat the switching node, as explained later. cwnd andssthresh are updated as shown in Fig. 4.
a) The switching node sends information describedin Section 5.1 to the TCP sender. When the TCPsender receives the feedback message after channelswitching, it calculates the RTTnew by Eq. (4), whichcorresponds to Eq. (1), and bottleneck bandwidth W ′
b.
RTTnew = LT1,2 + · · ·+ LT
i−1,i + L′Ti,i+1 + · · · (4)
4. Cross-layer control that can share information obtained fromlayer 2, 3, and 4, is essential. In [20], cross-layer collaboration fromlayer 2 to layer 4 can be realized by an independent managementmodule implemented in the Linux kernel. Therefore, we assumethat this kind of implementation can be used for TCP CoBA.

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 7
Start
a) Sender receives a feedback message indicating the completion of channel switching
b) sFÐñÍ
ÐÍ
R rät
or
sFËÍÍÙÐâ
ËÍÍÚ×Ï
R rät
c) bottleneck node 0Õ: 0Õ R E
d) Calculation of FZQG��requires remaining buffer space BFi
e) ?SJ@ññ L ��� ?SJ@ñá���
OOPDNAOD L ?SJ@""
YES
YES
End
f ) ?SJ@ññ L ��� OOPDNAOD L ?SJ@""
NO
NO
Fig. 4. Procedure for cwnd updates
Note that CRAHN includes queueing delay inLTi,i+1, so that its resulting cwnd assumes some pack-
ets are buffered in relay nodes. This can congest thebuffer, while achieving high throughput if the avail-able buffer space is large enough. Since the queuingdelay can be estimated by exploiting packet length,bandwidth, and buffer length, CoBA employs LT
i,i+1
excluding queuing delay. However, in our simulation,we pre-set the parameters of bandwidth and 1-hopRTT for each channel. On the other hand, the bufferlength is obtained from layer 2.
b) The Wb and RTTold are the bottleneck bandwidthand RTT before channel switching, respectively. Wheneither the W ′
b or RTTnew is changed by over 20% fromthe previous value before channel switching (i.e.,Wb
and RTTold), the sender updates cwnd.c) The following procedures depend on where the
bottleneck node Nb is located. It is important to care-fully deal with the case that the bottleneck node isjust node i or some node located between node i andnode N after channel switching, i.e., Nb ≥ i (see (d)).Otherwise, the cwnd and ssthresh are determined byjust BDP (see (f)).
d) Here the cwnd′ that prevents buffer overflowin the bottleneck node Nb based upon the remain-ing buffer space given by node Nb is derived. First,suppose that cwnd is increased to cwnd′. In this case,some packets of cwnd′−cwnd, which is denoted by R[packets], are now allowed to be sent. This can thenresult in R consecutive packet arrivals at node Nb. Onthe other hand, let BW ∗ be the minimum bandwidthbetween node 1 and i − 1. Note that the BW ∗ canbe obtained through the feedback information. Then,the transmission time of a packet, tt, is PS
W ′b
(PS:packet size), which is larger than the packet arrivalinterval, ta, equal to PS
BW∗ . Thus, a new packet arrivesbefore a packet is entirely transmitted, and so part ofthe packet is buffered at every packet arrival, which
is given by 1 − tatt
. Therefore, R consecutive packetarrivals cause the queue of packets to increase byBLNb
, which is given by Eq. (6).
R[pkts] = (cwnd′[pkts]− cwnd[pkts]) (5)
BLNb[pkts] = R
(1− W ′
b
BW ∗
)= (cwnd′ − cwnd)
BW ∗ −W ′b
BW ∗ (6)
In order to prevent buffer overflow in node Nb,BLNb
has to satisfy BFNb≥ BLNb
. On the otherhand, during the channel switching time, node Nb
receives no packets from node i, while transmittingpackets stored there, so that the buffer of node Nb willbe empty by the end of channel switching. After theend of channel switching, node i begins to transmitpackets stored back-to-back, which will arrive at nodeNb and then be further forwarded by node Nb. Inaddition, the bandwidth of node Nb is smaller thanthat of node i. Thus, BFNb
is expected not to besmaller than BFi. To be on the safe side, assume thatBFNb
= BFi and BLNbsatisfies inequality (7).
BFi[pkts] ≥ BLNb= (cwnd′ − cwnd)
BW ∗ −W ′b
BW ∗ (7)
Therefore, cwnd′ considering BFi is calculated by
cwnd′[pkts] = BFiBW ∗
BW ∗ −W ′b
+ cwnd (8)
e) The cwnd′ can avoid buffer overflow in theswitching node, but it does not take into account BDPwhich is known to be suitable for cwnd. Therefore,it could lead to congestion when cwnd is updatedto cwnd′. To solve this problem, the TCP sender ofCoBA also calculates BDP using Eq. (9), and it updatescwnd using Eq. (10), which corresponds to Eq. (2).Furthermore, the TCP sender of CRAHN can changeits mode to slow start immediately after channelswitching because of the non-updated ssthresh. Asa result, buffer overflow could occur. Therefore, theTCP sender of CoBA updates ssthresh using Eq. (11).
BDP [pkts] =W ′
b[b/s] ·RTTnew[s]
PS[b/pkt](9)
cwnd′′[pkts] = min (BDP, cwnd′) (10)ssthresh[pkts] = cwnd′′ (11)
f) When bottleneck node Nb is located on a path be-tween TCP sender and node i, cwnd and ssthresh aredetermined by BDP only Eqs. (12), which correspondsto Eq. (2), and (13).
cwnd′′[pkts] =W ′
b[b/s] ·RTTnew[s]
PS[b/pkt](12)
ssthresh[pkt] = cwnd′′ (13)

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 8
6 PERFORMANCE EVALUATION
In this section, we implemented TCP CoBA into Qual-net 4.5 and examine how the change of bottleneckbandwidth and RTT due to channel switching affectssingle flow and multi flows of NewReno, Westwood+,CRAHN, and CoBA. As described in Fig. 4, the cwndis updated in different ways depending upon the loca-tion of the bottleneck node. Thus, in order to examinewhether that works well, we also consider the casewhere the bottleneck node moves. The topology usedis the same as that shown in Fig. 1. Unless otherwisestated, the same parameter values as in Table 1 areused. Note that we set the L2 buffer size to 100 packetsin all the experiments, and cwnd and the averagethroughput are used as a performance measure.
6.1 Case of Single TCP Flow
Here, we examine the impact of the change in bottle-neck bandwidth and RTT on the throughput perfor-mance of single TCP flow.
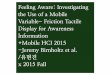
6.1.1 Case where a node experiencing channelswitching is a bottleneck nodeAs noted in Section 5, the sender of TCP CoBA takesinto account both BDP and the remaining buffer size inthe switching node. This section evaluates whether thiscontrol can prevent buffer overflow in the switchingnode. The network topology and simulation parame-ters are listed in Fig. 2a.
Fig. 5a shows cwnd for CoBA, and Fig. 5b shows thequeue length of node 3, which is not only switchingnode but also bottleneck node. In these figures, thebandwidth of Channel 3’ is 60 Mb/s. The sender ofCoBA can increase the cwnd to a suitable value whennode 3 switches from low-rate Channel 3 to high-rate Channel 3’, while preventing buffer overflow inthe switching node. Furthermore, CoBA can decreasethe cwnd to a suitable value when node 3 switchesfrom high-rate Channel 3’ to low-rate Channel 3.As a result, CoBA can limit the queue length to anappropriate value.
When node 3 switches from low-rate Channel 3 tohigh-rate Channel 3’, the cwnd of CRAHN is drasti-cally increased and then immediately reduced. This isbecause the buffer in the relay nodes overflowed dueto an excessive large cwnd (See in Fig. 5b). As a result,throughput of CRAHN is degraded.
Fig. 5c shows the average throughput of all TCPvariants when the bandwidth of Channel 3’ ischanged from 20 Mb/s to 60 Mb/s. This figure in-dicates that the throughput of CoBA is higher thanthat of the other TCP variants. The advantage of CoBAbecomes clear with an increasing gap of changes in thecommunication characteristics for each channel switch.In particular, when Channel 3’ is 60 Mb/s, CoBA canachieve up to a 200% improvement in performancecompared to CRAHN.
6.1.2 Case where bottleneck node moves betweenthe channel switching node and upstream node
In our method, when some node experiences channelswitching, TCP CoBA suspends data transmissionto avoid buffer overflow. Therefore, nodes locatedbetween the channel switching node and the sendernode, which will be called as “upstream nodes” fromnow on, can transmit packets queued in L2 buffereven during the period of channel switching. Con-sequently, a length of L2 buffer tends to be smallimmediately after channel switching. CoBA, hence,updates the cwnd based on BDP when the bottlenecknode is located at upstream nodes from the channelswitching node (See f) in Fig. 4). Here, to examinehow this works well, we consider the case where thebottleneck node moves between the channel switchingnode and its upstream node due to channel switching.Fig. 6a indicates bandwidth and link delay of eachchannel. In this evaluation, the bottleneck node ischanged from node 2 to node 3 when channel switch-ing node switches from high rate Channel 3 to low-rate Channel 3’, and vice versa.
Fig. 6b shows cwnd for CoBA and CRAHN. Then,Figs. 6c and 6d show the queue length of node 2 andnode 3, respectively. From these figures, the band-width of Channel 2 is 60 Mb/s. The sender of bothTCP variants update cwnd to the BDP when the nodechanges from low-rate Channel 3 to high-rate Channel3’. However, the sender of CoBA is able to increasethe cwnd to a suitable value, while preventing bufferoverflow in node 2 (see Fig. 6c). On the other hand,cwnd of CRAHN increases drastically and thus bufferoverflow at relay node occurs, which is the same asin Fig. 5a. This is because CoBA is totally differentwith CRAHN in a way of measuring RTTnew; i.e.,CoBA excludes the queuing delay at relay nodes,while CRAHN includes it in RTTnew. As a result,RTTnew measured by CoBA is much smaller than thatof CRAHN; thereby avoiding buffer overflow due tothe small BDP successfully (see Figs. 6c and 6d).
Fig. 6e shows the average throughput of all TCPvariants when the bandwidth of Channel 2 is changedfrom 20 Mb/s to 60 Mb/s. The BDP is drasticallychanged due to channel switching to the large band-width of Channel 2, i.e., 60 Mb/s. CoBA updatesthe cwnd to suitable value in response to the drasticchange in the BDP. In particular, when Channel 2 is60 Mb/s, CoBA can achieve up to 200% improvementin performance, compared to CRAHN.
6.2 Case of Multiple TCP Flows
Here, we examine how the change in bottleneck band-width and RTT affects the performance of multipleTCP flows. The simulation network is illustrated inFig. 7, in which node 1 and node 2 send bulk data tonode 4 from 0 s to 40 s (flow 1), and node 5 from 10s to 50 s (flow 2), respectively.

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 9
0
50
100
150
200
250
300
350
10 15 20 25 30 35 40 45 50 0
10
20
30
40
50
60
70
80
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(a) cwnd (Channel 3’ is 60 Mb/s)
0
20
40
60
80
100
120
140
10 15 20 25 30 35 40 45 50 0
10
20
30
40
50
60
70
80
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(b) Queue length (node 3)
0
5
10
15
20
25
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 3’ Rate [Mb/s]
Upper boundCoBA
NewRenoWestwood+
CRAHN
(c) Averaged throughput
Fig. 5. Bottleneck node is switching node (The bandwidth of Channel 3’ set at 20 to 60 Mb/s)
channel i: ch i(0 s - 50 s)Flow 1
100Mb/s, 20ms
100Mb/s, 0.5ms
20 ~ 60Mb/s,0.5ms
100Mb/s, 0.5ms
10Mb/s, 0.5ms
ch1 ch2 ch4switch
ch3
ch3’
node1 node2 node3 node4 node5
(a) The topology and parameters 0
50
100
150
200
250
300
350
10 15 20 25 30 35 40 45 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(b) cwnd (Channel 2 is 60 Mb/s)
0
20
40
60
80
100
120
140
10 15 20 25 30 35 40 45 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(c) Queue length (node 2)
0
20
40
60
80
100
120
140
10 15 20 25 30 35 40 45 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(d) Queue length (node 3)
0
5
10
15
20
25
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 2 Rate [Mb/s]
Upper boundCoBA
NewRenoWestwood+
CRAHN
(e) Averaged throughput
Fig. 6. Bottleneck node is switching node or upstream node (The bandwidth of Channel 2 set at 20 to 60 Mb/s)
channeli: ch i(0 s - 40 s)Flow 1
(10 s - 50 s)Flow 2
ch1 ch2 ch4switch
ch3
ch3’node1 node2 node3 node4 node5
Fig. 7. Simulation model
6.2.1 Case where the shared bottleneck node of bothflows experiences channel switching
This section evaluates the performance of each of twoTCP flows. The network topology and simulation pa-rameters are listed in Fig. 8a. Note that the bottlenecknode of two TCP flows is fixed to node 3, irrespectiveof channel switching.
Fig. 8b shows the total throughput of all TCP vari-ants when the bandwidth of Channel 3’ is changedfrom 20 Mb/s to 60 Mb/s. This figure indicates thatthe throughput of CoBA is obviously higher than that
of the other TCP variants. The advantage of CoBAbecomes clear with an increasing gap of changes inthe communication characteristics for each channelswitch. In particular, when Channel 3’ is 60 Mb/s,CoBA can achieve up to a 110% improvement inperformance compared to CRAHN.
Fig. 8c and Fig. 8d show the average throughputof each TCP flow when the bandwidth of Channel 3’is changed from 20 Mb/s to 60 Mb/s. These figuresindicate that the throughput of both flow 1 and flow2 obtained by CoBA is obviously higher than thatof the other TCP variants. On the other hand, thethroughput of both flows of the CRAHN is the lowest.
Fig. 8e and Fig. 8f show how the cwnd changesin CoBA and CRAHN and Fig. 8g shows the queuelength of node 3, when the bandwidth of Channel 3’is 60 Mb/s. From Figs. 8e and 8g, the senders of CoBAincrease their cwnd to a suitable value when switchingfrom low-rate Channel 3 to high-rate Channel 3’,while preventing buffer overflow in the switchingnode. Furthermore, CoBA is able to decrease the cwnd

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 10
channeli: ch i(0 s - 40 s)Flow 1
(10 s - 50 s)Flow 2
20 ~ 60Mb/s, 20ms
100Mb/s, 0.5ms
100Mb/s,0.5ms
100Mb/s, 0.5ms
10Mb/s, 0.5ms
ch1 ch2 ch4switch
ch3
ch3’
node1 node2 node3 node4 node5
(a) The topology and parameters
5
10
15
20
25
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 3’ Rate [Mb/s]
Upper boundCoBA
NewRenoWestwood+
CRAHN
(b) Total throughput (flow 1 + flow 2)
0
2
4
6
8
10
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 3’ Rate [Mb/s]
CoBANewReno
Westwood+CRAHN
(c) Averaged throughput of flow 1
0
2
4
6
8
10
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 3’ Rate [Mb/s]
CoBAWestwood+
NewRenoCRAHN
(d) Averaged throughput of flow 2
0
50
100
150
200
250
300
0 10 20 30 40 50 0
10
20
30
40
50
60
70
80
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)flow1 cwndflow2 cwnd
(e) Behavior of cwnd for TCP CoBA
0
50
100
150
200
250
300
0 10 20 30 40 50 0
10
20
30
40
50
60
70
80
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)flow1 cwndflow2 cwnd
(f) Behavior of cwnd for TCP CRAHN
0
20
40
60
80
100
120
140
0 10 20 30 40 50 0
10
20
30
40
50
60
70
80
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(g) Queue length (node 3)
Fig. 8. 2 TCP flows share the bottleneck node experiencing channel switching.
of two flows to a suitable value when switching fromhigh-rate Channel 3’ to low-rate Channel 3.
In contrast, from Figs. 8f and 8g, we can see that thecwnds of two flows in CRAHN change in a differentway. Namely, these values are drastically increasedand then immediately reduced when the nodes switchfrom low-rate Channel 3 to high-rate Channel 3’. Thisis because the buffer in the relay nodes overflowsdue to an excessively large cwnd. As a result, thethroughput of CRAHN is degraded.
When the bottleneck node experiencing channelswitching is shared by two TCP flows, each of TCPflows achieves almost the same throughput perfor-mance. Therefore, in such case, we can say that fair-ness can be achieved, irrespective of the type of TCPvariants, but this evaluation indicates that, comparedwith CRAHN, CoBA improves the throughput ofmultiple TCP flows.
6.2.2 Case where the bottleneck node changes be-tween the switching node and upstream node at everychannel switchingNext, we investigate how the change in bottlenecknodes impacts the throughput performance achievedby TCP CoBA. Topology and parameter settings arelisted in Fig. 9a. As shown in this figure, the bot-tleneck node swaps between node 3 (when usingChannel 3) and node 2 (when using Channel 3’).
Fig. 9b shows the sum of throughput of two TCPflows achieved by all TCP variants when the band-width of Channel 2 is changed from 20 Mb/s to 60Mb/s. This figure indicates that the total throughputof CoBA is clearly higher than that of the otherTCP variants. On the other hand, the throughput ofCRAHN is the second highest in all TCP variants.
Fig. 9c and Fig. 9d show the mean throughput ofeach flow. These figures indicate that for CRAHN, thethroughput of flow 2 is higher than that of the flow1. This throughput gap of each flow in CRAHN is thelargest, especially the throughput of flow 2, being 4times as high as that of flow 1. On the other hand, thegap in CoBA is obviously limited. Fig. 9e shows theJain’s fairness index [19] of all TCP variants. From thisfigure, we can remark that the fairness index achievedby CoBA is significantly higher than that of CRAHN,while providing excellent throughput performance(see Fig. 9b). Next, we focus on the behavior of cwndfor each flow in order to clarify the reason of the gap.
When the bandwidth of Channel 3’ is 60 Mb/s, Figs.9f and 9g show behavior of cwnd controlled by CoBAand CRAHN, and Figs. 9h and 9i show the queuelength of node 2 and node 3. From Fig. 9f, CoBAof flow 1 increases the cwnd and then immediatelyreduces when node 3 and node 4 switch from low-rateChannel 3 to high-rate Channel 3’. When Channel 3’ isused, the bottleneck node is node 2, which is also the

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 11
channeli: ch i(0 s - 40 s)Flow 1
(10 s - 50 s)Flow 2
100Mb/s, 20ms
100Mb/s, 0.5ms
20 ~ 60Mb/s,0.5ms
100Mb/s, 0.5ms
10Mb/s, 0.5ms
ch1 ch2 ch4switch
ch3
ch3’
node1 node2 node3 node4 node5
(a) The topology and parameters 5
10
15
20
25
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 2 Rate [Mb/s]
Upper boundCoBA
CRAHNWestwood+
NewReno
(b) Total throughput (flow 1 + flow 2)
0
2
4
6
8
10
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 2 Rate [Mb/s]
CoBANewReno
Westwood+CRAHN
(c) Averaged throughput of flow 1
0
2
4
6
8
10
12
14
20 30 40 50 60
thro
ughp
ut [M
b/s]
ch 2 Rate [Mb/s]
CRAHNCoBA
Westwood+NewReno
(d) Averaged throughput of flow 2
0.6
0.7
0.8
0.9
1
1.1
1.2
20 30 40 50 60
fairn
ess
ch 2 Rate [Mb/s]
CoBAWestwood+
NewRenoCRAHN
(e) Fairness index
0
50
100
150
200
250
300
350
400
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)flow1 cwndflow2 cwnd
(f) Behavior of cwnd for TCP CoBA
0
100
200
300
400
500
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)flow1 cwndflow2 cwnd
(g) Behavior of cwnd for TCP CRAHN
0
20
40
60
80
100
120
140
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(h) Queue length (node 2)
0
20
40
60
80
100
120
140
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(i) Queue length (node 3)
Fig. 9. Bottleneck node is swapped between the switching node and its upstream node by channel switching.
sender of flow 2. Hence, data transmission from node2 (i.e., flow 2) is stopped successfully, whereas datatransmission from node 1 (i.e., flow 1) is not, therebycausing buffer overflow at node 2 (See Fig. 9h).
From Fig. 9g, we can see that the cwnd of flow 2in CRAHN is larger than that of CoBA. On the otherhand, the cwnd of flow 1 in CRAHN is smaller thanthat of CoBA. This is because the buffer overflows offlow 1 are drastically increased at CRAHN becausecwnd of flow 2 is too large.
From these results, we can remark that when thebottleneck node is changed to upstream node due tochannel switching, CoBA updates the cwnd based onBDP as in CRAHN, and thus packet losses cannot beavoided completely (see Figs. 9h and 9i). As a result,the fairness index value of CoBA is gradually de-creased with the increase in the bandwidth of channel2, but CoBA provides good throughput performance.
6.2.3 The bottleneck node of each flow is rotatedbetween the shared and the isolated in response tochannel switchingIn the above sections, the bottleneck node of each flowis always shared. In this section, the network topologyand parameters are illustrated in Fig. 10a. Hence, the
bottleneck node of flow 1 is node 3, while that of flow2 is node 4 when using Channel 3’ for hop 3. Onthe other hand, the bottleneck node of each flow isnode 3 (i.e., shared) when using Channel 3 for hop 3.Furthermore, the bandwidth of Channel 4 is changedfrom 10 Mb/s to 40 Mb/s.
Fig. 10b shows the average throughput of twoTCP flows achieved by all TCP variants when thebandwidth of Channel 4 is changed from 10 Mb/s to40 Mb/s. This figure indicates that the throughput ofCoBA clearly increases with an increasing bandwidthof Channel 4. In contrast, the throughput of CRAHNslightly decreases with an increasing bandwidth ofChannel 4. To clarify the reason of this behavior, wenext examine how the throughput and the cwnd ofeach flow are changed.
Fig. 10c and Fig. 10d show the average throughputof each flow when the bandwidth of Channel 4 ischanged from 10 Mb/s to 40 Mb/s. These figures indi-cate that in CoBA, the throughput of flow 2 drasticallyincreases with an increasing bandwidth of Channel4. On the contrary, the throughput of flow 1 slightlydecreases with an increasing bandwidth of Channel4. Only flow 2 passes through Channel 4, so thatthe throughput of flow 2 is increased in proportion

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 12
channeli: ch i(0 s - 40 s)Flow 1
(10 s - 50 s)Flow 2
100Mb/s, 20ms
100Mb/s, 0.5ms
100Mb/s,0.5ms
10 ~ 40Mb/s, 0.5ms
10Mb/s, 0.5ms
ch1 ch2 ch4switch
ch3
ch3’
node1 node2 node3 node4 node5
(a) The topology and parameters 5
10
15
20
25
30
35
40
10 20 30 40
thro
ughp
ut [M
b/s]
ch 4 Rate [Mb/s]
Upper boundCoBA
CRAHNNewReno
Westwood+
(b) Total throughput (flow 1 + flow 2)
0
5
10
15
20
25
10 20 30 40
thro
ughp
ut [M
b/s]
ch 4 Rate [Mb/s]
CoBACRAHN
NewRenoWestwood+
(c) Averaged throughput of flow 1
0
2
4
6
8
10
10 20 30 40
thro
ughp
ut [M
b/s]
ch 4 Rate [Mb/s]
CoBAWestwood+
NewRenoCRAHN
(d) Averaged throughput of flow 2
0.6
0.7
0.8
0.9
1
1.1
1.2
10 20 30 40
fairn
ess
ch 4 Rate [Mb/s]
CoBAWestwood+
NewRenoCRAHN
(e) Fairness index
0
50
100
150
200
250
300
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)flow1 cwndflow2 cwnd
(f) Behavior of cwnd for TCP CoBA
0
50
100
150
200
250
300
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)flow1 cwndflow2 cwnd
(g) Behavior of cwnd for TCP CRAHN
0
20
40
60
80
100
120
140
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(h) Queue length (node 3)
0
20
40
60
80
100
120
140
0 10 20 30 40 50 0
20
40
60
80
100
120
pack
ets
band
wid
th [M
b/s]
time[s]
bandwidth (hop3)CoBA
CRAHN
(i) Queue length (node 4)
Fig. 10. Bottleneck node is swapped between the shared and the isolated in response to channel switching.
to the increase in the bandwidth of Channel 4. As aresult, as shown in Fig. 10e, the fairness index valueof CoBA is increased at constant inclination with theincrease in the bandwidth of Channel 4. Althoughother TCP variants generally show the high fairnessindex value, we can see that the throughput of flow 1with larger bottleneck bandwidth (than flow 2) alwaysshows relatively low value. On the other hand, CoBAcan utilize its large bottleneck bandwidth efficiently,thereby increasing the throughput of flow 1 clearly.
Here, we focus on the cwnds of each flow in CoBA(Fig. 10f). From Fig. 10f, the cwnd of flow 1 is de-creased to 1 at 38 s because TCP timeout caused bybuffer overflow. When Channel 3 is used for hop 3,the bottleneck nodes of both flows are shared at node3. On the other hand, when Channel 3’ is used, thebottleneck node of flow 1 is node 3, and that of flow2 is node 4. Hence, in this case, the cwnd of flow 2 isincreased with an increasing bandwidth of Channel 4.As a result, the packets of flow 1 cause buffer overflowat node 3 with increasing of Channel 4’s bandwidth,as shown in Fig. 10h.
From Fig. 10d, the throughput of flow 2 in CRAHNdoes not increase even if bandwidth of Channel 4 isincreased. Fig. 10g shows the behavior of cwnd for
CRAHN when bandwidth of Channel 4 is 40 Mb/s.The bottleneck node of flow 1 is node 3 and thebottleneck node of flow 2 is node 4 when Channel3’ is used for hop 3. The cwnds of both flows aredrastically increased and then immediately reducedwhen the nodes switch from low-rate Channel 3 tohigh-rate Channel 3’. This is because the cwnds of bothflows are updated to a large value, the packets of bothflows are overflowed at the buffers of each bottlenecknode (see Figs. 10h and 10i).
This evaluation indicates that, compared withCRAHN, CoBA improves the throughput even if thebottleneck nodes of each flow are isolated.
6.3 Scalability evaluation in a large-scale network
Finally, to evaluate the scalability of TCP CoBA, weassume a large-scale network of chain topology con-sisting of 100 nodes in which five TCP flows aretransmitted simultaneously (See Fig. 11a). Note thatsince five nodes are randomly selected from node 1to 49 as the sender nodes, while another five nodesare randomly selected from node 51 to 100 as thereceiver nodes, the number of hops is drastically dif-ferent among coexisting flows. Then, to examine the

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 13
TABLE 3Fairness index (5 flows).
TCP CoBA 0.9902 TCP Westwood 0.9793TCP NewReno 0.9770 TCP CRAHN 0.9815
communication performance in the worst case whereall five flows with different hop numbers experiencechannel switching at some node simultaneously, weassume that a node located at the center of network(node 50) experiences channel switching.
Suppose that one of two channels (Channel 1 andChannel 2) with different link bandwidth and delayis used at a time on a link between node 50 and node51 to examine communication performance when thecharacteristics of channel used is drastically changed:Channel 1 (bandwidth 60 Mb/s, delay 5 ms) andChannel 2 (bandwidth 10 Mb/s, delay 0.01 ms). Forother links, bandwidth is varied from 80 Mb/s to 100Mb/s, while delay is varied from 0.01 ms to 5 ms.Other parameters employed here are listed in Table 1.
Figure 11b shows how the total throughput ischanged, when the number of TCP flows is variedfrom 1 to 5. From this figure, we can see that withthe increase in the number of TCP flows, the totalthroughput of CoBA is increased by more than 40%,compared with other TCP variants. In contrast, thetotal throughput of CRAHN indicates the worst per-formance and almost constant value, irrespective ofthe increase in the TCP flows.
Next, to evaluate the fairness for five TCP flowsachieved by all TCP variants, we show the achievablefairness index in Table 3. From Table 3, we can remarkthat CoBA indicates the highest fairness index value,whereas NewReno shows the worst value. To clar-ify this reason, Fig. 11c shows how the throughputis varied with the change in the number of hops.From this figure, we can see that NewReno withsmall number of hops attains high throughput perfor-mance, while that with large number of hops sufferslow throughput performance. In contrast, flows ofCoBA with small hop numbers intentionally limit theamount of transmitted data for flows with large hopnumbers. Therefore, CoBA can achieve the highestfairness index value among multiple flows.
6.4 Discussion on fairness of TCP CoBA
Here, we focus on fairness issue between TCP CoBAand the existing TCP. First, as mentioned before,we design CoBA to be exactly same with NewRenoexcept for the periods of channel switching. Fromthis, fair use of network resources can be guaranteedbetween them unless channel switching occurs.
When the channel is switched, the existing TCPdetermines the amount of transmitted data withoutawareness of the change in communication character-istics. Therefore, burst packet losses could occur due
to buffer overflow and thus the cwnd is reduced dras-tically. If multiple TCP flows coexist, it will becomemore severe due to the interference with each other.
In contrast, CoBA updates cwnd appropriatelybased on the feedback information including the num-ber of coexisting flows, immediately after the channelswitching. This indicates that each CoBA flow doesnot affect the coexisting TCP flows’ performance,regardless of the types of coexisting TCP, e.g., CoBAand the conventional NewReno. Therefore, we cansay that negative impact by introducing CoBA can belimited extremely.
7 CONCLUSIONS
This paper focused on transport protocols in cognitiveradio network which select a channel from a widespectrum range. We then examined how the transportprotocol and the relay node should be redesigned tomake an efficient use of available wireless resource.
First, the TCP performance of existing TCP variantssuch as TCP CRAHN was compared. Simulation re-sults showed that CRAHN outperforms all the otherTCP variants considered, but cannot attain good per-formance when communication characteristics dras-tically change due to channel switching. The issuearises from excessively increasing window size afterthe channel switching in the above context, whichleads to many consecutive arrivals to relay nodes andeventual buffer overflow. Thus, TCP sender shouldconsider where the bottleneck node is located andhow much buffer resource is available in the bottle-neck node, in addition to BDP.
Next, to resolve this issue, this paper proposedTCP CoBA as a new transport protocol. Each SU isequipped with a GPS function and thus can syn-chronously execute periodical sensing. The senderin TCP CoBA updates the cwnd when either thebottleneck bandwidth or RTT is changed by over 20%after channel switching. Furthermore, it also takes intoaccount both the remaining buffer space and BDP.Through simulation experiments, it was shown that,compared with TCP CRAHN, TCP CoBA drasticallyimproves throughput performance.
REFERENCES
[1] Y. R. Kondareddy and P. Agrawal, “Effect of Dynamic Spec-trum Access on Transport Control Protocol Performance,” inProc. of IEEE GLOBECOM, 2009, pp. 1-6.
[2] A. M. R. Slingerland, P. Pawelczak, R. V. Prasad, A. Lo, andR. Hekmat, “Performance of Transport Control Protocol OverDynamic Spectrum Access Links,” in Proc. of IEEE DySPAN,2007, pp. 486-495.
[3] W. Kim, A. Kassler, and M. Gerla, “TCP Performance inCognitive Multi-Radio Mesh Networks,” in Proc. of CogArt,2011, p. 44.
[4] M. D. Felice, K. R. Chowdhury, W. Kim, A. Kassler, L. Bononi,“End-to-end Protocols for Cognitive Radio Ad Hoc Networks:An Evaluation Study,” Elsevier Performance Evaluation, Vol. 68,No. 9, pp. 859-875, 2011.

JOURNAL OF TRANSACTIONS ON MOBILE COMPUTING, VOL. 6, NO. 1, JANUARY 2007 14
PU node 100link 49
・・・ ・・・
link 50node 49node 1 node 50 node 51
Tx nodes are randomly selected
Rx nodes are randomly selected
(a) The topology and parameters 4
5
6
7
8
9
10
11
12
1 2 3 4 5
thro
ughp
ut [M
b/s]
The number of flows
CoBAWestwood+
NewRenoCRAHN
(b) Total throughput (5flows)
0
1
2
3
4
5
6
1-25 26-50 51-75 76-100
thro
ughp
ut [M
b/s]
Hop
CoBAWestwood+
NewRenoCRAHN
(c) Throughput vs. Hop counts (5flows)
Fig. 11. Scalability evaluation (5 flows).
[5] S. Mascolo, C. Casetti, M. Gerla, M. Y. Sanadidi, and R.Wang, “TCP westwood: Bandwidth Estimation for EnhancedTransport over Wireless Links,” in Proc. of ACM MOBICOM,2001, pp. 287-297.
[6] L. A. Grieco and S. Mascolo, “Performance evaluation andcomparison of Westwood+, New Reno and Vegas TCP con-gestion control,” ACM Computer Communication Review, Vol.34, No. 2, pp. 25-38. 2004.
[7] K. Sundaresan, V. Anantharaman, H. Y. Hsieh, and R. Sivaku-mar, “ATP: A Reliable Transport Protocol for Ad Hoc Net-works,” IEEE Trans. On Mobile Computing, Vol. 4, No. 6,pp. 588-603, 2005.
[8] J. Liu and S. Singh, “ATCP: TCP for Mobile Ad Hoc Net-works,” IEEE Journal on Sel. Areas of Comm., Vol. 19, No. 7,pp. 1300-1315, 2001.
[9] D. Sarkar and H. Narayan, “Transport Layer Protocols forCognitive Networks,” in Proc. of IEEE INFOCOM ComputerCommunication Workshop, 2010, pp. 1-6.
[10] C. Luo, F. R. Yu, H. Ji, and V. C. Leung, “Optimal ChannelAccess for TCP Performance Improvement in Cognitive RadioNetworks,” Springer Wireless Networks, Vol. 17, No. 2, pp. 479-492, 2011.
[11] D. Katabi, M. Handley, and C. Rohrs, “Congestion control forhigh bandwidth-delay product networks,” in Proc. of ACMSIGCOMM, 2002, pp.89-102.
[12] K. R. Chowdhury, M. D. Felice, I. F. Akyildiz, ”TCP CRAHN:A Transport Control Protocol for Cognitive Radio Ad HocNetworks,” IEEE Transactions on Mobile Computing, Vol. 12, No.4, pp. 790-803, 2013.
[13] A. Al-Ali and K. R. Chowdhury, “TFRC-CR: An Equation-based Transport Protocol for Cognitive Radio Networks,”Elsevier Ad Hoc Networks Journal, Vol. 11, No. 6, pp. 1836-1847,2013.
[14] K. Tsukamoto, S. Matsuoka, O. Altintas, M. Tsuru, Y. Oie, “Dis-tributed Channel Coordination in Cognitive Wireless Vehicle-to-Vehicle Communications,” in Proc. of WAVE, 2008, CD-ROM.
[15] K. Chen, Y. Xue, and K. Nahrstedt, “On Setting TCP’s Con-gestion Window Limit in Mobile Ad Hoc Networks,” in Proc.of IEEE ICC, pp.1080-1084, 2003.
[16] F. Li, M. Li, R. Lu, H. Wu, M. Claypool, and R. Kinicki,“Measuring queue capacities of IEEE 802.11 wireless accesspoints,” in Proc. of IEEE BROADNETS, pp. 846-853, 2007.
[17] W. Y. Lee and I. F. Akyildiz, “Optimal spectrum sensing frame-work for cognitive radio networks,” IEEE Trans. on WirelessCommunications, Vol. 7, No. 10, pp. 3845-3857, 2008.
[18] M. Wellens, A. Baynast, and P. Mahonen, “Performance ofdynamic spectrum access based on spectrum occupancy statis-tics,” IET Communications, Vol. 2, No. 6, pp. 772-782, 2008.
[19] R. K. Jain, D.-M. W. Chiu, and W. R. Hawe, “A quantitativemeasure of fairness and discrimination for resource allocationand shared computer system,” Tech. Rep. DEC-TR-301, 1984.
[20] W. Lim, D. Kim, Y. Suh, J. Won, “Implementation andperformance study of IEEE 802.21 in integrated IEEE802.11/802.16e networks,” Elsevier Computer Communica-tions, Vol. 32, No. 1, pp. 134-143, 2009.
Kazuya Tsukamoto received his D.E. de-gree in computer science from Kyushu In-stitute of Technology (KIT), Japan, in 2006.From April 2006 to March 2007, he was aJapan Society for the Promotion of Science(JSPS) Research Fellow at KIT. In 2007, hewas an assistant professor in the Departmentof Computer Science and Electronics, KIT,and then has been an associate professorin the same department since April 2013.His research interests include performance
evaluation of computer networks and wireless networks. He is amember of the ACM, the IPSJ, and the IEICE.
Shun Koba received the B.E., and M.E.degrees from Kyushu Institute of Technol-ogy in 2011, 2013, respectively. Since April2013, he has been employee in KDDI COR-PORATION. His research interests includeperformance evaluation of wireless networks,especially cognitive radio networks. He is amember of the IEICE.
Masato Tsuru received B.E. and M.E. de-grees from Kyoto University, Japan in 1983and 1985, respectively, and then received hisD.E. degree from Kyushu Institute of Tech-nology, Japan in 2002. He worked at OkiElectric Industry Co., Ltd., Nagasaki Univer-sity, and Telecommunications AdvancementOrganization of Japan. In 2003, he joinedthe Department of Computer Science andElectronics, Kyushu Institute of Technologyas an Associate Professor, and then has
been a Professor in the same department since April 2006. Hisresearch interests include performance measurement, modeling,and management of computer communication networks. He is amember of the ACM, IEICE, IPSJ, and JSSST.
Yuji Oie received the B.E., M.E., and D.E.degrees from Kyoto University in 1978, 1980,and 1987, respectively. From 1980 to 1983he worked at Nippon Denso Company Ltd.,Kariya, Japan. From 1983 to 1990 he waswith the Department of Electrical Engineer-ing, Sasebo College of Technology. From1990 to 1995 he was an associate professorin the Department of Computer Science andElectronics, Faculty of Computer Scienceand Systems Engineering, KIT. From 1995
to 1997 he was a professor at the Information Technology Center,NAIST. Since April 1997 he has been a professor in the Departmentof Computer Science and Electronics, Faculty of Computer Scienceand Systems Engineering, KIT. His research interests include perfor-mance evaluation of computer communication networks, high-speednetworks, and queuing systems. He is a fellow of the IPSJ and theIEICE, and a member of the the ACM.









![[Tutorial] Theft Aware Na Nokia BELLE](https://img.pdfslide.tips/doc/110x75/5572116e497959fc0b8ef6e6/tutorial-theft-aware-na-nokia-belle.jpg)