Embed Size (px)
Citation preview

Выделениеисопоставлениеособыхточеквобработке
изображений
АлександрМордвинцев,СПбГУИТМО,НИИНКТ[email protected]
http://znah.net2011
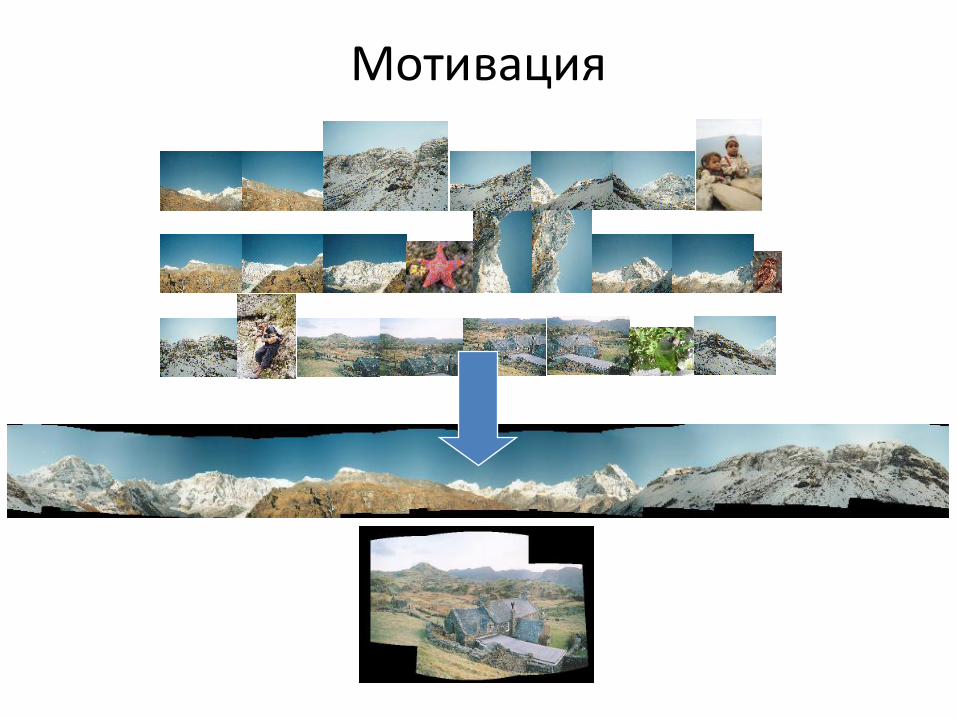
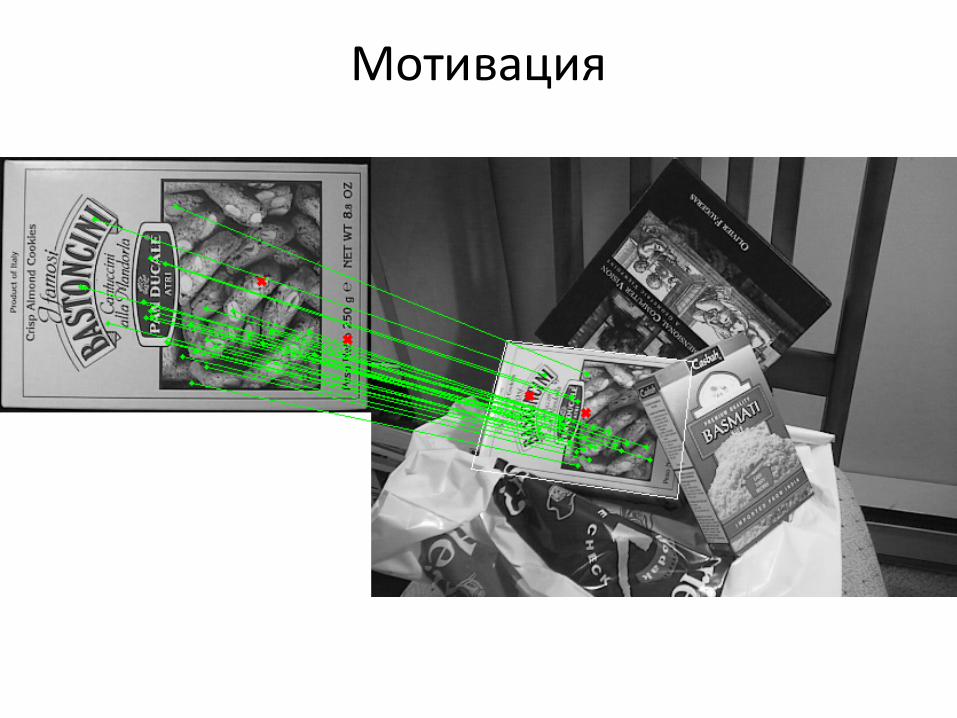
Мотивация

Мотивация
Мотивация

Мотивация

Мотивация

План• Выделениеособыхточек(feature pointdetection)– Harris,LoG,DoG,MSER,FAST…
• Построениедескрипторов(featuredescription)– SIFT,SURF,BRIEF,DAISY…
• Featurematching• Applications

Поискособыхточек
• Повторяемость– Детекторнаходитодниитежеточкинаразныхкадрах
• Эффективность– Особыхточекзначительноменьше,чемпикселей

Поискособыхточектрадиционныйподход
Функция«особенности»
Saliencyfunction
Порог
Локальныемаксимумы

Локальнаяособенность:угол• Ищемточки,окрестностькоторыхсильноизменяетсяприсмещениивлюбомнаправлении
Монотонныйрегион(-)
Край(-) Угол(+)

Детектор угловХаррисаHarrisCornerDetector
( )[ ]
[ ] ∑
∑
⎥⎥⎦
⎤
⎢⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡≈
≈++−=
yx yyx
yxx
yx
IIIIII
yxwMvu
Mvu
vyuxIyxIyxwvuE
,2
2
,
2
),(,
),(),(,),(
Окно(напр.Гауссиан)
Яркостьточкиокрестности
Яркостьсмещеннойточки
Матрицапроизведенийпроизводныхвточке(x,y)
АппроксимацияEквадратичнойформой
Матрицамоментов,структурныйтензор…

ДетекторугловХаррисафункции“особенности”
• λ1 иλ2 – собственныечисламатрицыM
• Инвариантныкповороту• Частичноинвариантнык
переменеосвещенности
),min(tracedet
)(tracedet
21Shi
Brown
2Harris
λλ=
=
−=
RMMR
MkMR
06.004.0tracedet
21
21
!=
+=
=
kMM
λλ
λλ

Структурныйтензор• ВторойсобственныйвекторматрицыMуказываетнаправлениетекстуры
• Обобщаетсянатрехмерноепространство



Выбормасштаба
• Проблема:детекторХаррисанеинвариантенкмасштабуизображения
• Необходимвыбормасштаба
• Локальнаяособенность:капля(blob)– Болееяркое(илитемное),
чемфон,пятнонаизображении
«Край» Угол!

ЛапласианГауссиана
• ПоложениелокальныхмаксимумовLoGопределяетположениеимасштабособойточки
• КомбинируетсясдетекторомХаррисадлявычислениямасштабауглов
• АппроксимациииспользуютсявдетекторахSIFT,SURFимногихдругих
( ))(),LoG( 22 xx Ig ∗∇= σσσ

ДетекторобластейMSER• MSER- MaximallyStable
Extremal Region• Устойчивыек
бинаризациисразличнымпорогомучасткиизображения
• Эффективнореализуетсяприпомощисистемынепересекающихсямножеств
• Инвариантенкаффиннымпреобразованиям

• Точкаособенная,есливнакольцерадиусаrестьдугаизNпоследовательныхпикселей,всеизкоторых– Значительнотемнееp– Значительносветлееp
ДетекторFAST:идея

• Классифицируемпикселикольцапопорогуt насветлые,темныеисерые.Окрестностьточкиописываетсятренарным вектором
• Строимрешающеедереводляклассификациивекторовнаособые/неособые
• Результат- >4000 строквложенныхif-else• Новсреднем всего2.26 сравненийнапиксельдляr=3,
N=9.Работаеточеньбыстро
ДетекторFAST:реализация

Дескрипторыособенностей• Описываютокрестностькаждойособойточкинаборомпараметров
• Должныбыть:– специфичны– локальны– устойчивы– простыввычислении– иметьадекватнуюметрику

ДескрипторыособенностейПростейшие• (не)ориентированныеокна

Гистограммыградиентов(SIFT)• Ориентацияточки(поискдоминирующегоградиента)
• Бьемориентированнуюокрестностьрегулярнойсеткой(обычно4x4)
• Строимгистограммуградиентов,попавшихвкаждуюячейку(обычно8бинов)
• Получаемвекториз4*4*8=128.Нормализуем.ЭтоиестьдескрипторSIFT

ДескрипторBRIEF• Приразработкедескрипторагенерируемслучайныйнаборпардвухмерныхвекторовсмещений(xi,xi’)
• Дескриптор точкиpb(p) - векторизN=128...256булевыхзначений
⎩⎨⎧
ʹ+≤+
ʹ+>+=
)()(если,1)()(если,0
)(ii
iii II
IIb
xpxpxpxp
p
• МетрикаХеммингадлясравнениядескрипторов

Сравнениедескрипторов• Имеемдванаборадескрипторов,хотимнайти
соответствия– Критерий1-NNdistance– 1-NN/2-NNdistance
• Используемвероятностныйиндексдляпоискаближайшихсоседейвмногомерномпространстве(FLANN)

• Модельтрансформациимеждуизображениями
• RANSAC
Регистрацияизображений

Приложения, демонстрации.

Ссылки• RichardSzeliski ComputerVision:AlgorithmsandApplications
(http://szeliski.org/Book/)• http://courses.graphicon.ru/main/vision/2011/lectures• Featuredetectors
– http://www.robots.ox.ac.uk/~vgg/research/affine– http://www.edwardrosten.com/work/fast.html– Space-timeinterestpoints
• Descriptors– http://www.cs.ubc.ca/~lowe/keypoints/– http://www.vision.ee.ethz.ch/~surf/– (BRIEF)http://cvlab.epfl.ch/~lepetit/– http://www.cmap.polytechnique.fr/~yu/research/ASIFT/demo.html– http://cvlab.epfl.ch/research/detect/ldahash/
• Applications– http://www.robots.ox.ac.uk/~bob/research/research_ptamm.html– http://phototour.cs.washington.edu/bundler/– http://pix4d.com/




![[35384] ПРОЕКТИРОВАНИЕ ЗДАНИЙ В ОСОБЫХ УСЛОВИЯХ СТРОИТЕЛЬСТВА И ЭКСПЛУАТАЦИИ.-В.М.Антонов,В.В.Леденеев,В.И.Скрылев](https://img.pdfslide.tips/doc/110x75/56d6bfab1a28ab3016972ab1/35384-.jpg)
























