Embed Size (px)
Citation preview

9 - CONCLUSIONES Y TRABAJOS FUTUROS
109
_______________________________________________________
CAPÍTULO 9
CONCLUSIONES
Y
TRABAJOS FUTUROS
_______________________________________________________
9.1. INTRODUCCIÓN
En este capítulo se extraen las conclusiones sobre los resultados obtenidos con el
modelo de simulación propuesto tanto para el estudio del eje ferroviario aislado, como para el
modelo de vagón completo ML95 de Bombardier utilizado en el metro de Lisboa.
Para el primer caso, se han comparado los resultados del modelo propuesto como los del
software Simpack frente a la solución analítica de Klingel [17], mientras que para el caso del
vagón completo, se ha comparado la solución del modelo frente a Simpack.
Así mismo se realiza una comparación del costo computacional del modelo propuesto
frente al programa de simulación multicuerpo implementado en Matlab que dispone el
departamento de Ingeniería Mecánica y desarrollado en la tesis [3]
Finalmente se trazarán las líneas de trajo futuro para esta investigación, qué
modificaciones se deben introducir y qué resultados se esperan conseguir
MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA
110
9.2. CONCLUSIONES DE LOS RESULTADOS DE SIMULACION
El estudio de sistemas ferroviarios, supone el desarrollo de tres modelos independientes:
El modelo del vehículo, el modelo de la vía, y el modelo de contacto rueda-carril. Se
implementan por separado para finalmente ensamblarlos y obtener el modelo completo, que en
este caso, consiste en un eje ferroviario para el primer caso y en el vagón ML95 para el
segundo.
La comparación de resultados con el movimiento de Klingel debe tener en cuenta la
frecuencia del mismo, pues este movimiento no tiene en cuenta las fuerzas de contacto, y por
tanto, sólo la frecuencia es un valor indicativo del comportamiento que se debe obtener en la
simulación. Tanto para el modelo propuesto en Matlab como para los resultados de Simpack, se
obtiene una frecuencia de oscilación acorde a Klingel. La figura 8.12 muestra que el modelo
propuesto se ajusta más a Klingel.
Para el segundo caso de estudio, es decir, para la simulación del vagón, se obtienen
valores similares tanto para Simpack como para Matlab con el modelo propuesto. Incluso las
fuerzas tangenciales de contacto tienen una variación inferior al 6%, siendo su cálculo en
Simpack mediante la teoría simplificada de Kalker, el método FASTSIM [15], y en el modelo
propuesto, mediante la teoría lineal de Kalker [Capítulo 5]. Esto es debido a que en las
condiciones de estudio, los valores de los creeps son pequeños, y por tanto, las fuerzas
tangenciales obtenidas son del mismo orden.
A falta de resultados experimentales, y teniendo en cuenta la complejidad y la no
linealidad de las ecuaciones que gobiernan la dinámica del sistema, se puede concluir con que el
modelo propuesto con tablas precalculadas para el contacto rueda - carril, reproduce fielmente el
comportamiento dinámico del vehículo ferroviario bajo condiciones estables.

9 - CONCLUSIONES Y TRABAJOS FUTUROS
111
9.3. COSTO COMPUTACIONAL CON TABLAS PRECALCULADAS
La simulación del vagón ML95 a velocidad constante de 30m/s, aborda un intervalo de
tiempo de 8 segundos con un paso de tiempo de 1 milisegundo, es decir, 240m de vía con
geometría ideal recta. El costo computacional supone un total de 2250,05 segundos (37 minutos
30 segundos) . Este valor es claramente inferior al obtenido por el simulador de sistemas
multicuerpo implementado en el departamento de ingeniería Mecánica y de los Materiales y
desarrollado en la tesis [3]. En el capítulo 1, se muestra el tiempo computacional del sistema
original sin simplificaciones, siendo éste de 17432,77 segundos (7 horas 50 minutos y 33
segundos), es decir, la simulación con tablas precalculadas y cinemática linealizada supone un
12,91% del costo computacional de la original, o lo que es lo mismo, una reducción total del
87,09%:
%𝐵𝐵𝐵𝐵𝑆𝑆𝑝𝑝𝑢𝑢𝑢𝑢𝐵𝐵𝐵𝐵𝑢𝑢𝐵𝐵𝑢𝑢𝐵𝐵𝐹𝐹 =𝑢𝑢𝐹𝐹𝐵𝐵𝐵𝐵𝑇𝑇𝑢𝑢𝑝𝑝𝑢𝑢𝐵𝐵𝑝𝑝𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝐵𝐵𝐹𝐹
· 100 =2250,05 𝐵𝐵
17432,77 𝐵𝐵 · 100 = 12,91% (9.1)
Para valorar cuáles son las subrutinas que en el modelo actual conllevan más costo
computacional, realizamos el análisis similar del capítulo 1 con la herramienta 𝑝𝑝𝑝𝑝𝐵𝐵𝑝𝑝𝑢𝑢𝐹𝐹𝑝𝑝𝑝𝑝 del
software Matlab y aplicado al modelo del vagón ML95.
En la tabla 9.1 se puede observar que las 15 funciones que más costo computacional
tienen, hacen referencia a cálculos cinemáticos y de fuerzas que ya se encontraban en el
programa original como las fuerzas muelle - amortiguador, el cálculo de las matrices de giro, o
el cálculo de las fuerzas de contacto, mientras que se han eliminado aquellas funciones que
buscaban la localización de los puntos de contacto y que aparecen en la tabla 1.2 del capítulo 1,
como son la propia función 𝐵𝐵𝑢𝑢𝐵𝐵𝐵𝐵𝐵𝐵𝑝𝑝𝑢𝑢𝑢𝑢𝑢𝑢𝐵𝐵𝐵𝐵, o el 𝑝𝑝𝐵𝐵𝐵𝐵𝐹𝐹𝑣𝑣𝑝𝑝 para resolver el sistema de ecuaciones
de los puntos de contacto.

MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA
112
Function Name Calls Total Time Self Time* Total Time Plot (dark band = self time)
Simula 1 2250.048 s 0.960 s
RungeKutta4 1 2248.797 s 1.392 s
EcMov_Baumgarte_Simbolico 32000 2247.405 s 27.599 s
FMuelleAmortiguador 32000 1111.639 s 0.666 s
FMuelleAmortiguador_3D 32000 1110.973 s 184.030 s
RotMat 10880012 649.698 s 142.102 s
VelocidadPunto 3840000 525.765 s 56.912 s
RotMat_3D 10880012 507.596 s 292.011 s
VelocidadPunto_3D 3840000 468.853 s 55.567 s
FContacto 32000 358.877 s 0.611 s
FContacto_3D 32000 358.266 s 19.746 s
PosicionPunto 3584000 294.329 s 51.273 s
PosicionPunto_3D 3584000 243.056 s 33.841 s
creep_kalker_lookup 128000 238.273 s 45.890 s
Tabla 9.1. Funciones de mayor costo computacional en modelo propuesto
9.4. TRABAJOS FUTUROS
Este Proyecto Fin de Máster, se engloba dentro de una línea de investigación del
departamento de Ingeniería Mecánica cuyo objetivo final es la auscultación de vías ferroviarias
en tiempo real. Con la simulación mediante tablas precalculadas y cinemática linealizada de las
ecuaciones del movimiento, se ha logrado reducir en más de un 87% el costo computacional
inicial del que se partía inicialmente para el análisis de sistemas multicuerpo.
Sin embargo, es necesario abordar muchas líneas de trabajo futuras para llegar al
objetivo final, algunas de las cuales se muestran a continuación.
9 - CONCLUSIONES Y TRABAJOS FUTUROS
113
9.4.1. INTRODUCCIÓN DE IRREGULARIDADES EN TABLA
PRECALCULADA
El principal objetivo en la auscultación de vías ferroviarias es la detección de las
irregularidades y su influencia en el comportamiento dinámico de los vehículos que pasan por
ellas. Las tablas precalculadas elaboradas en el presente proyecto, permiten identificar los
parámetros de contacto de un eje ferroviario sobre una vía de geometría ideal pero no tiene en
cuenta las posibles irregularidades de la misma. Por tanto, se propone una metodología que
permita identificar en tablas precalculadas, los parámetros de contacto rueda - carril a partir del
desplazamiento lateral del eje y de las irregularidades de la vía.
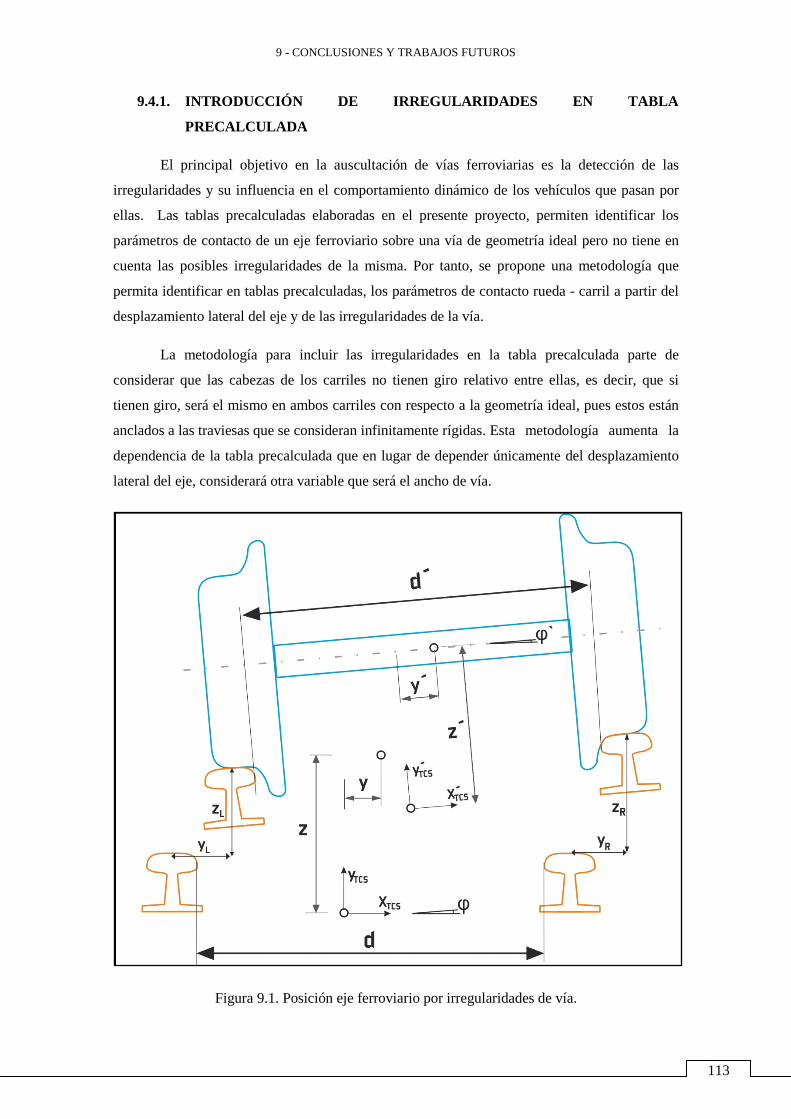
La metodología para incluir las irregularidades en la tabla precalculada parte de
considerar que las cabezas de los carriles no tienen giro relativo entre ellas, es decir, que si
tienen giro, será el mismo en ambos carriles con respecto a la geometría ideal, pues estos están
anclados a las traviesas que se consideran infinitamente rígidas. Esta metodología aumenta la
dependencia de la tabla precalculada que en lugar de depender únicamente del desplazamiento
lateral del eje, considerará otra variable que será el ancho de vía.
Figura 9.1. Posición eje ferroviario por irregularidades de vía.

MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA
114
Considérese la figura 9.1 en donde 𝐶𝐶 es el ancho de vía, 𝑆𝑆,𝜑𝜑 y 𝑧𝑧 el desplazamiento
lateral, roll y coordenada vertical del eje con respecto al TCS. Las irregularidades pueden
suponer un desplazamiento de las cabezas de los carriles en 𝑆𝑆𝐿𝐿 , 𝑧𝑧𝐿𝐿 para el izquierdo y en 𝑆𝑆𝑅𝑅 , 𝑧𝑧𝑅𝑅
para el derecho. En esta situación y considerando ángulos pequeños, el nuevo ancho de vía 𝐶𝐶′ y
el nuevo desplazamiento lateral con respecto al sistema de referencia tras la irregularidad
𝑆𝑆′ pueden calcularse como:
𝐶𝐶′ = 𝐶𝐶 + 𝑆𝑆𝑅𝑅 − 𝑆𝑆𝐿𝐿 (9.2)
𝑆𝑆′ = 𝑆𝑆 −𝑆𝑆𝑅𝑅 − 𝑆𝑆𝐿𝐿
2 (9.3)
Conocidos 𝑆𝑆′ y 𝐶𝐶′ , se hace uso de la tabla precalculada para conocer el resto de
variables. Estas variables están calculadas para el sistema de referencia tras la irregularidad, y
habrá que actualizarlas con respecto al TCS según 9.6 y 9.7.
𝑧𝑧′ = 𝑝𝑝(𝑆𝑆′ ,𝐶𝐶′) (9.4)
𝜑𝜑′ = 𝑝𝑝(𝑆𝑆′ ,𝐶𝐶′) (9.5)
𝑧𝑧 = 𝑧𝑧′ +𝑧𝑧𝐿𝐿 + 𝑧𝑧𝑅𝑅
2 (9.6)
𝜑𝜑 = 𝜑𝜑′ +𝑧𝑧𝑅𝑅 − 𝑧𝑧𝐿𝐿𝐶𝐶′
(9.7)
9.4.2. VALIDACIÓN EXPERIMENTAL
Resulta evidente la necesidad de validar los resultados obtenidos con datos
experimentales. Para ello es necesario la experimentación de un vehículo ferroviario con
perfiles de rueda - carril detallados para la elaboración de las tablas precalculadas.
En la actualidad, el proyecto se encuentra en fase de diseño y fabricación de un vehículo
ferroviario a escala. El ancho de vía a emplear será el estándar de 5 pulgadas para modelismo
ferroviario. Una vista en perspectiva de la geometría del vehículo se muestra en la figura 9.2.
9 - CONCLUSIONES Y TRABAJOS FUTUROS
115
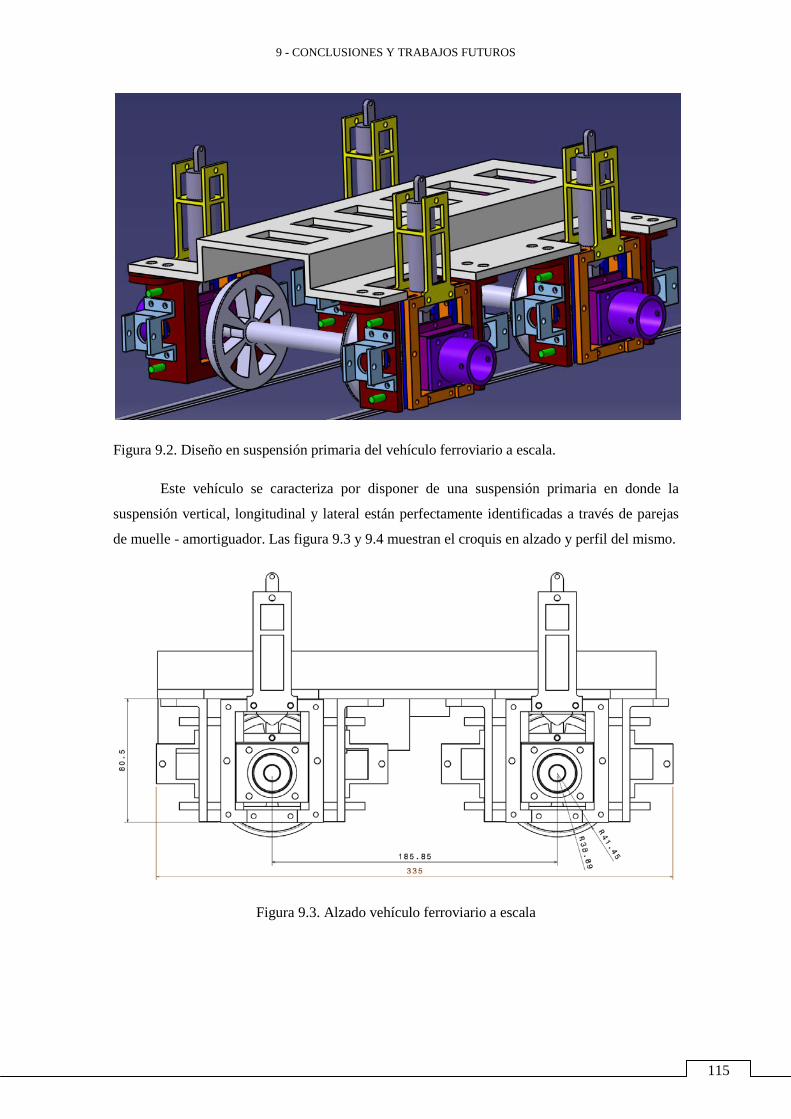
Figura 9.2. Diseño en suspensión primaria del vehículo ferroviario a escala.
Este vehículo se caracteriza por disponer de una suspensión primaria en donde la
suspensión vertical, longitudinal y lateral están perfectamente identificadas a través de parejas
de muelle - amortiguador. Las figura 9.3 y 9.4 muestran el croquis en alzado y perfil del mismo.
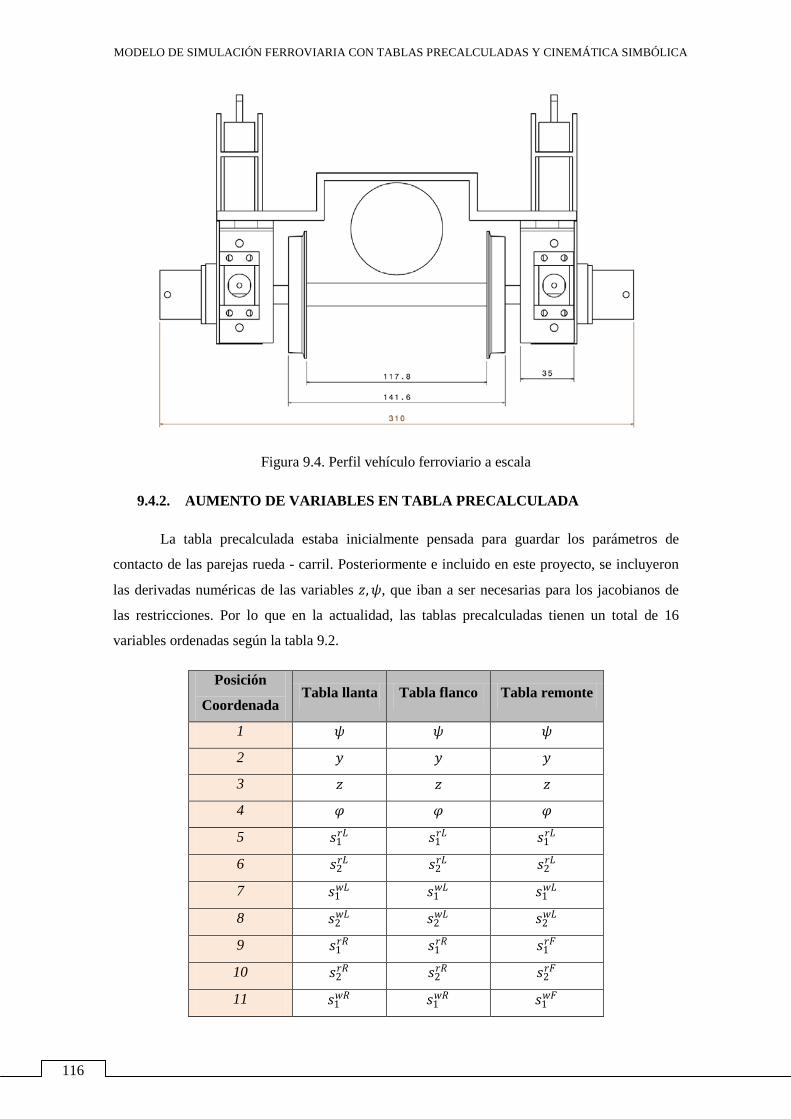
Figura 9.3. Alzado vehículo ferroviario a escala
MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA
116
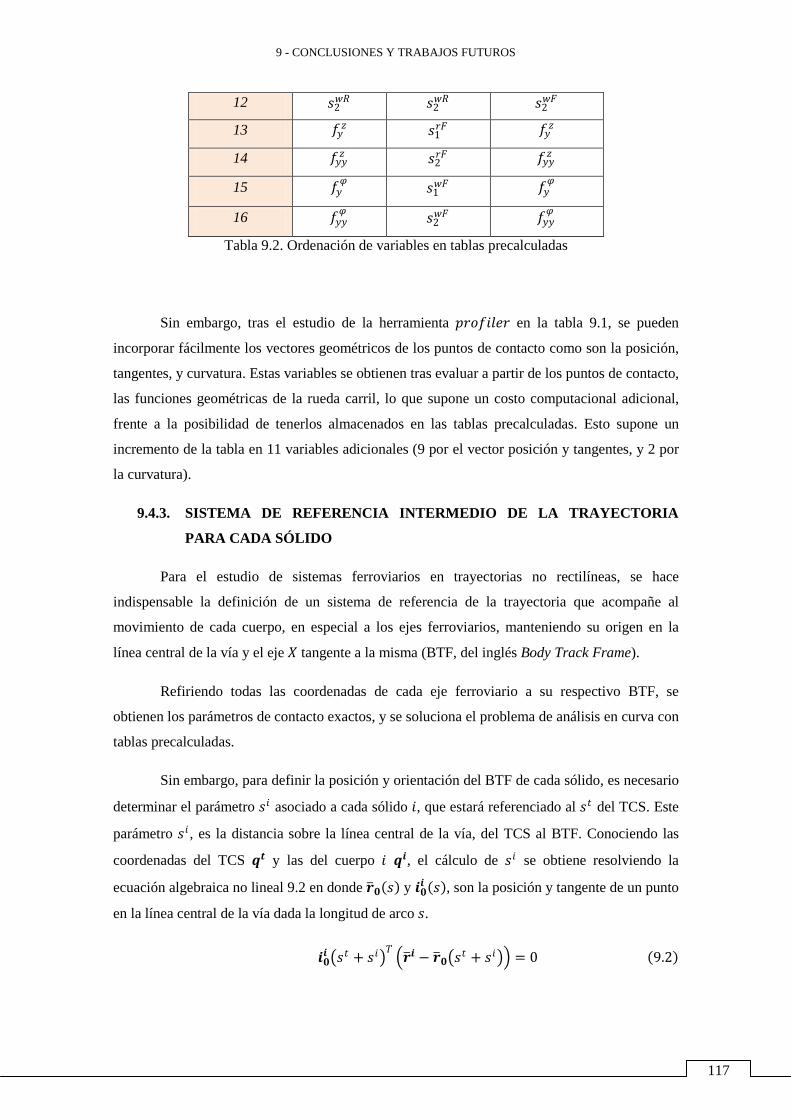
Figura 9.4. Perfil vehículo ferroviario a escala
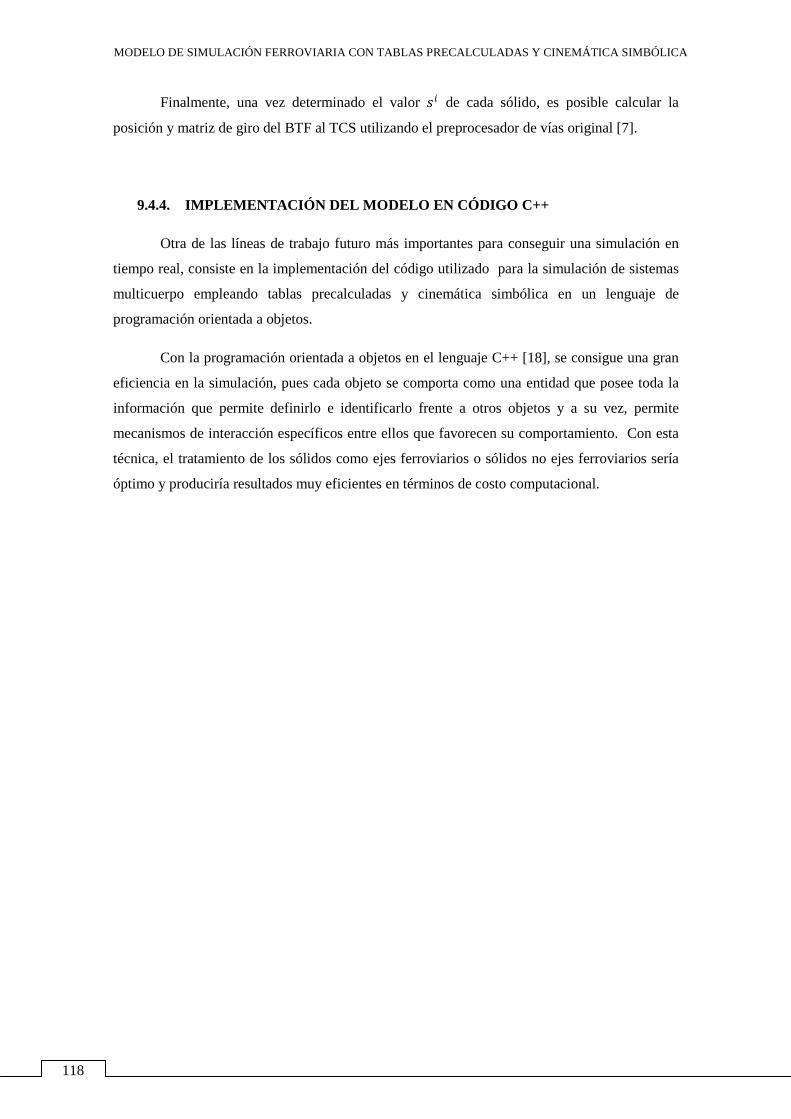
9.4.2. AUMENTO DE VARIABLES EN TABLA PRECALCULADA
La tabla precalculada estaba inicialmente pensada para guardar los parámetros de
contacto de las parejas rueda - carril. Posteriormente e incluido en este proyecto, se incluyeron
las derivadas numéricas de las variables 𝑧𝑧,𝜓𝜓, que iban a ser necesarias para los jacobianos de
las restricciones. Por lo que en la actualidad, las tablas precalculadas tienen un total de 16
variables ordenadas según la tabla 9.2.
Posición
Coordenada Tabla llanta Tabla flanco Tabla remonte
1 𝜓𝜓 𝜓𝜓 𝜓𝜓
2 𝑆𝑆 𝑆𝑆 𝑆𝑆
3 𝑧𝑧 𝑧𝑧 𝑧𝑧
4 𝜑𝜑 𝜑𝜑 𝜑𝜑
5 𝐵𝐵1𝑝𝑝𝐿𝐿 𝐵𝐵1
𝑝𝑝𝐿𝐿 𝐵𝐵1𝑝𝑝𝐿𝐿
6 𝐵𝐵2𝑝𝑝𝐿𝐿 𝐵𝐵2
𝑝𝑝𝐿𝐿 𝐵𝐵2𝑝𝑝𝐿𝐿
7 𝐵𝐵1𝑦𝑦𝐿𝐿 𝐵𝐵1
𝑦𝑦𝐿𝐿 𝐵𝐵1𝑦𝑦𝐿𝐿
8 𝐵𝐵2𝑦𝑦𝐿𝐿 𝐵𝐵2
𝑦𝑦𝐿𝐿 𝐵𝐵2𝑦𝑦𝐿𝐿
9 𝐵𝐵1𝑝𝑝𝑅𝑅 𝐵𝐵1
𝑝𝑝𝑅𝑅 𝐵𝐵1𝑝𝑝𝐹𝐹
10 𝐵𝐵2𝑝𝑝𝑅𝑅 𝐵𝐵2
𝑝𝑝𝑅𝑅 𝐵𝐵2𝑝𝑝𝐹𝐹
11 𝐵𝐵1𝑦𝑦𝑅𝑅 𝐵𝐵1
𝑦𝑦𝑅𝑅 𝐵𝐵1𝑦𝑦𝐹𝐹
9 - CONCLUSIONES Y TRABAJOS FUTUROS
117
12 𝐵𝐵2𝑦𝑦𝑅𝑅 𝐵𝐵2
𝑦𝑦𝑅𝑅 𝐵𝐵2𝑦𝑦𝐹𝐹
13 𝑝𝑝𝑆𝑆𝑧𝑧 𝐵𝐵1𝑝𝑝𝐹𝐹 𝑝𝑝𝑆𝑆𝑧𝑧
14 𝑝𝑝𝑆𝑆𝑆𝑆𝑧𝑧 𝐵𝐵2𝑝𝑝𝐹𝐹 𝑝𝑝𝑆𝑆𝑆𝑆𝑧𝑧
15 𝑝𝑝𝑆𝑆𝜑𝜑 𝐵𝐵1
𝑦𝑦𝐹𝐹 𝑝𝑝𝑆𝑆𝜑𝜑
16 𝑝𝑝𝑆𝑆𝑆𝑆𝜑𝜑 𝐵𝐵2
𝑦𝑦𝐹𝐹 𝑝𝑝𝑆𝑆𝑆𝑆𝜑𝜑
Tabla 9.2. Ordenación de variables en tablas precalculadas
Sin embargo, tras el estudio de la herramienta 𝑝𝑝𝑝𝑝𝐵𝐵𝑝𝑝𝑢𝑢𝐹𝐹𝑝𝑝𝑝𝑝 en la tabla 9.1, se pueden
incorporar fácilmente los vectores geométricos de los puntos de contacto como son la posición,
tangentes, y curvatura. Estas variables se obtienen tras evaluar a partir de los puntos de contacto,
las funciones geométricas de la rueda carril, lo que supone un costo computacional adicional,
frente a la posibilidad de tenerlos almacenados en las tablas precalculadas. Esto supone un
incremento de la tabla en 11 variables adicionales (9 por el vector posición y tangentes, y 2 por
la curvatura).
9.4.3. SISTEMA DE REFERENCIA INTERMEDIO DE LA TRAYECTORIA
PARA CADA SÓLIDO
Para el estudio de sistemas ferroviarios en trayectorias no rectilíneas, se hace
indispensable la definición de un sistema de referencia de la trayectoria que acompañe al
movimiento de cada cuerpo, en especial a los ejes ferroviarios, manteniendo su origen en la
línea central de la vía y el eje 𝑋𝑋 tangente a la misma (BTF, del inglés Body Track Frame).
Refiriendo todas las coordenadas de cada eje ferroviario a su respectivo BTF, se
obtienen los parámetros de contacto exactos, y se soluciona el problema de análisis en curva con
tablas precalculadas.
Sin embargo, para definir la posición y orientación del BTF de cada sólido, es necesario
determinar el parámetro 𝐵𝐵𝑢𝑢 asociado a cada sólido 𝑢𝑢, que estará referenciado al 𝐵𝐵𝑢𝑢 del TCS. Este
parámetro 𝐵𝐵𝑢𝑢 , es la distancia sobre la línea central de la vía, del TCS al BTF. Conociendo las
coordenadas del TCS 𝒒𝒒𝑩𝑩 y las del cuerpo 𝑢𝑢 𝒒𝒒𝑭𝑭, el cálculo de 𝐵𝐵𝑢𝑢 se obtiene resolviendo la
ecuación algebraica no lineal 9.2 en donde 𝒓𝒓�𝟎𝟎(𝐵𝐵) y 𝑭𝑭𝟎𝟎𝑭𝑭 (𝐵𝐵), son la posición y tangente de un punto
en la línea central de la vía dada la longitud de arco 𝐵𝐵.
𝑭𝑭𝟎𝟎𝑭𝑭 �𝐵𝐵𝑢𝑢 + 𝐵𝐵𝑢𝑢�𝑇𝑇 �𝒓𝒓�𝑭𝑭 − 𝒓𝒓�𝟎𝟎�𝐵𝐵𝑢𝑢 + 𝐵𝐵𝑢𝑢�� = 0 (9.2)
MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA
118
Finalmente, una vez determinado el valor 𝐵𝐵𝑢𝑢 de cada sólido, es posible calcular la
posición y matriz de giro del BTF al TCS utilizando el preprocesador de vías original [7].
9.4.4. IMPLEMENTACIÓN DEL MODELO EN CÓDIGO C++
Otra de las líneas de trabajo futuro más importantes para conseguir una simulación en
tiempo real, consiste en la implementación del código utilizado para la simulación de sistemas
multicuerpo empleando tablas precalculadas y cinemática simbólica en un lenguaje de
programación orientada a objetos.
Con la programación orientada a objetos en el lenguaje C++ [18], se consigue una gran
eficiencia en la simulación, pues cada objeto se comporta como una entidad que posee toda la
información que permite definirlo e identificarlo frente a otros objetos y a su vez, permite
mecanismos de interacción específicos entre ellos que favorecen su comportamiento. Con esta
técnica, el tratamiento de los sólidos como ejes ferroviarios o sólidos no ejes ferroviarios sería
óptimo y produciría resultados muy eficientes en términos de costo computacional.
BIBLIOGRAFÍA
119
_______________________________________________________
CAPÍTULO 10
BIBLIOGRAFIA
_______________________________________________________
[1] K. Popp, H. Kruse, and I. Kaiser, Vehicle-track dynamics in the mid-frequency range,
Vehicle system dynamics, 31 (1999), pp. 423 - 464.
[2] J. C. Jesus Pombo, J. A. Cadete Ambrósio, A Multibody Methodology for Railway
Dynamics Applications (2004), Lisboa.
[3] A. M. Recuero, Simulation of Coupled Railroad Vehicle - Flexible Track Dynamics using
Moving Modes and Krylov Subspaces Techniques.
[4] J.L. Escalona, R. Chamorro and A.M. Recuero, Eigenvalue analysis of multibody models
of railroad vehicles including track flexibility, in Proceedings of the Asme 2011 IDETC
& CIEC, August 29-31 2011, Washington, DC, USA, 2011.
[5] C. Rathod and A. Shabana, Geometry and differentiability requirements in multibody
railroad vehicle dynamic formulations, Nonlinear Dynamics, 47 (2007), pp. 249-261
[6] A. Shabana, A. El-Gandour, and K.Zaazaa, Study of theeffect of thespiralgeometryon
Wheel/rail contactforces, Proc. IMechEPart K: J. Multi-Body Dynamics, 225 (2011), pp.
111-124
MODELO DE SIMULACIÓN FERROVIARIA CON TABLAS PRECALCULADAS Y CINEMÁTICA SIMBÓLICA
120
[7] Enrique Naz Melón, Programación de un Preprocesador de Vías para la Simulación
Dinámica de Vehículos Ferroviarios mediante Sistemas Multicuerpo, Univ. Sevilla 2008.
[8] Ahmed A. Shabana, Computational Dynamics, University of Illinois at Chicago, 1994.
[9] Baumgarte, J. (1972) "Stabilization of Constraints and Integrals of Motion in Dynamical
Systems", Computer Methods in Applied Mechanics and Engineering, 1, pp. 1-16.
[10] Chang, C. and Nikravesh, P. E. (1985) "Optimal Design of Mechanical Systems with
Constraint Violation Stabilization Method", Journal of Mechanisms, Transmissions and
Automation in Design, 107, pp. 493-498.
[11] V.K. Garg, R. V. Dukkipati, Dynamics of railway vehicle dynamics, Academic Press,
Ontario, Canadá, 1984.
[12] J. J. Kalker, Three-Dimensional Elastic Bodies in Rolling Contact, Kluwer, Dordrecht,
The Netherlands, 1990
[13] J. Santamaría, E.G. Vadillo, J. Gómez. A Comprehensive Method for the Elastic
Calculation of the Two-Point Wheel-Rail Contact, Vehicle System Dynamics 2006,
Vol.44 Supplement, 240-250
[14] Ascher, Uri M.; Petzold, Linda Ruth (1998). Computer methods for ordinary differential
equations and differential-algebraic equations. Philadelphia.
[15] Simpack AG, Simpack Reference Guide (2009). Gilching, Germany.
[16] Gear, C. W., Leimkuhler, B., Gupta,G. Automatic integration of Euler-Lagrange
equations with constraing. J. Comput. Appl. Math., 77-90 (1995).
[17] C. Esveld. Modern Railway Track. Delft University of Technology. Delft, Netherlands.
[18] Fco. Javier Ceballos. Programación Orientada a Objetos con C++, Alfaomega Grupo
Editor.