-
Control Automático
Control con observadores de estado
-
Contenido
◼ Observabilidad
◼ Observadores de estado sin entrada r(t)
◼ Cálculo de la ganancia Kf del observador usando Ackermann
◼ Compensadores con entrada de referencia
◼ La función de transferencia del compensador con observador
de estado
◼ Ejemplos y ejercicios
E. Interiano 2
-
Observabilidad: definición
Partimos del sistema
◼ se dice que el estado x(t0) es observable si dada cualquier
entrada u(t), existe un tiempo finito tf t0 tal que, el
conocimiento de:
◼ u(t) para t0 t tf◼ las matrices A, B, C y D
◼ la salida y(t) para t0 t tfsea suficiente para determinar
x(t0).
E. Interiano 3
ሶ𝐱 = 𝐀𝐱(𝑡) + 𝐁𝐮(𝑡)𝐲(𝑡) = 𝐂𝐱(𝑡) + 𝐃𝐮(𝑡)
-
Observabilidad: definición
◼ Si cada estado del sistema es observable para un tiempo
finito, se dice que el sistema es completamente observable, o
simplemente observable.
◼ Para que el sistema descrito sea completamente observable, es
necesario y suficiente que S, la matriz de observabilidad de n x
np, tenga un rango n.
E. Interiano 4
𝐒 =
𝐂𝐂𝐀𝐂𝐀𝟐
. . .𝐂𝐀𝐧−𝟏
-
Pruebas para la observabilidad
◼ Si el sistema tiene solo una salida, C es una matriz de reglón
de 1 x n y S es una matriz cuadrada de n x n. Entonces, el sistema
es completamente observable si S es no singular
◼ Para un sistema SISO, el par A,C es completamente observable
si A y C están en la forma canónica observable (FCO) o son
transformables a la FCO mediante una transformación de
similitud.
E. Interiano 5
-
Pruebas para la observabilidad (2)
◼ Si A está en la forma canónica diagonal (FCD) el par A,Ces
completamente observable si todos los elementos en las columnas de
C son diferentes de cero.
◼ Si A está en la forma canónica de Jordan (FCJ), el par A,Ces
completamente observable si NO todos los elementos en las columnas
de C que corresponden a la primera columna de cada bloque de Jordan
son cero.
E. Interiano 6
-
Observabilidad a partir de G(s) o G(z)
◼Si la función de transferencia entrada-salida de un sistema
lineal tiene cancelación de polos y ceros, el sistema será o
no
observable dependiendo de cómo se definan las variables de
estado.
◼Si la función de transferencia entrada-salida no tiene
cancelación de polos y ceros, el sistema siempre se puede
representar mediante las ecuaciones dinámicas como un
sistema totalmente observable.
E. Interiano 7
-
Ejemplo 1a
◼ Sea la función de transferencia
◼ Se descompone en la forma FCC
◼ Cuya matriz de observabilidad, S,es singular y por ello el par
[A,C] no es observable
E. Interiano 8
𝑌(𝑠)
𝑈(𝑠)=
𝑠 + 1
(𝑠 + 1)(𝑠 + 2)𝐀 =
0 1−2 −3
𝐁 =01
𝐂 = 1 1
𝐒 =𝐂𝐂𝐀
=1 1−2 −2
-
Ejemplo 1a: continuación
◼ El sistema en forma FCC se transforma a la forma FCO
◼ Debido a que la FCO se puederealizar, el par A, C es
observable
◼ Note que se pierde la controlabilidad !
E. Interiano 9
𝐀 =0 −21 −3
𝐁 =11
𝐂 = 0 1
ሶ𝐱 =0 1−2 −3
𝐱 +01𝑢
𝑦 = 1 1 𝐱
-
la realimentación puede alterar
la observabilidad
◼ Sea el sistema del cual puede
demostrarse que es observable
◼ Aplicamos realimentación de
estado con
◼ La matriz S tiene el
determinante
E. Interiano 10
ሶ𝐱 =0 1−2 −3
𝐱 +11𝑢
𝑦 = 1 2 𝐱
𝑢(𝑡) = 𝑟(𝑡) − 𝐊𝐱(𝑡) 𝐊 = [𝑘1, 𝑘2]
𝐱(𝑡) = (𝐀 − 𝐁𝐊)𝐱(𝑡) + 𝐁𝐫(𝑡)
𝐒 =𝐂
𝐂(𝐀 − 𝐁𝐊)=
1 2−𝑘1 − 4 −3𝑘2 − 5
𝐒 = 6𝑘1 − 3𝑘2 + 3
Por lo que si k1 y k2 se seleccionan para que S = 0, el
sistema en lazo cerrado sería no observable
-
Observabilidad en tiempo discreto
Partimos del sistema
Para que este sistema sea observable la matriz de nm x n
debe
tener rango n
E. Interiano 11
𝐱((𝑘 + 1)𝑇) = 𝐀𝑑𝐱(𝑘𝑇) + 𝐁𝑑𝐮(𝑘𝑇)𝐲(𝑘𝑇) = 𝐂𝐱(𝑘𝑇) + 𝐃𝐮(𝑘𝑇)
𝐒 =
𝐂𝐂𝐀𝐝
𝐂𝐀𝐝𝟐
. . .
𝐂𝐀𝐝𝐧−𝟏
-
Ejercicio 1
Encuentre si el sistema es observable
E. Interiano 12
𝐱(𝑘 + 1) =1.65 −0.6751 0
𝐱(𝑘) +10𝑢(𝑘)
𝑦(𝑘) = 1 0.825 𝐱(𝑘) T = 0.01s
-
Ejemplo 1b: Observabilidad en tiempo
discreto
◼ Los sistemas mostrados con completamente observables
E. Interiano 13
𝐱 𝑘 + 1 =0.7 00 0.8
𝑥1(𝑘)𝑥2(𝑘)
+23𝐮 𝑘 ;
𝑦 𝑘 = 1 3𝑥1(𝑘)𝑥2(𝑘)
𝐱(𝑘 + 1) =
0.9 1 0 00 0.9 10 0 0.9
0.5 10 0 0.5
𝐱(𝑘) +
0 10 03 00 02 1
𝑢1(𝑘)𝑢2(𝑘)
𝑦1(𝑘)𝑦2(𝑘)
=1 1 1 0 00 1 1 1 0
𝐱(𝑘)
-
Observadores de estado (1)
No siempre es posible medir el estado x
A veces es necesario estimar las variables de estado no medibles
a partir
de las variables de salida y de las variables de control
E. Interiano 14
ሶ𝑥(𝑡) 𝑦(𝑡)𝑥(𝑡)
𝑥(𝑡)
𝑢(𝑡)0 න
-
Observadores de estado (2)
El estado simulado es diferente al estado x real debido a
incertidumbres del modelo
E. Interiano 15
𝐱
ሶ𝑥(𝑡) 𝑦(𝑡)𝑥(𝑡)
𝑥(𝑡)
𝑢(𝑡)
𝑦(𝑡)
0 න
Simulador
-
Observadores de estado (3)
Introducimos la salida y al simulador para mejorar la estimación
del estado
x y obtenemos un observador
E. Interiano 16
ሶ𝑥(𝑡)
𝑦(𝑡)
𝑦(𝑡)
𝑥(𝑡)
𝑥(𝑡)
𝑢(𝑡)
0
-
+
-
El observador de estado completo de
Luenberger
E. Interiano 17
Realimentación para
corregir el error de x
Planta
Observador
r(t) y(t)x(t)u(t)0
𝑦(𝑡)𝑥(𝑡)
+
-
-
Ecuaciones del observador de estado
◼ Las ecuaciones del observador son similares a las del sistema,
excepto porque se ha añadido un término a partir de la resta de las
salidas del sistema y del observador. Observe que la contribución
de D se cancela durante la resta.
◼ Este término agregado, que corresponde a una realimentación,
ponderada por la matriz Kf, ayudará a reducir la diferencia entre
el estado del modelo y estado del sistema real
E. Interiano 18
ሶ𝐱(𝑡) = 𝐀𝐱(𝑡) + 𝐁𝐮(𝑡) + 𝐊𝐟𝐂 𝐱(𝑡) − 𝐱(𝑡)
𝑦(𝑡) = 𝐂 ⋅ 𝐱(𝑡) + 𝐃𝑢(𝑡)
-
Ecuaciones del observador de estado (2)
◼ Restando a la ecuación de estado del sistema original, la
ecuación del estado estimado obtenemos
◼ Después de factorizar
E. Interiano 19
ሶ𝐱(𝑡) − ሶ𝐱(𝑡) = 𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) −[𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) + 𝐊𝐟𝐂 𝐱(𝑡) − 𝐱(𝑡)
]
ሶ𝐱(𝑡) − ሶ𝐱(𝑡) = (𝐀 − 𝐊𝐟𝐂) 𝐱(𝑡) − 𝐱(𝑡)
-
Ecuaciones del observador de estado (3)
◼ Definimos e(t) como el error entre el estado de la planta y
el
estado estimado
◼ Esta ecuación homogénea para el error, es muy similar a la
que se obtuvo cuando se analizó la realimentación de estado.
◼ Se debe calcular Kf para que el observador sea: estable y
más rápido que el sistema realimentado y así el error se
extinga rápidamente; lo que equivale a que el estado
estimado converja en el estado real rápidamente.E. Interiano
20
ሶ𝐞(𝑡) = ሶ𝐱(𝑡) − ሶ𝐱(𝑡) = (𝐀 − 𝐊𝐟𝐂)𝐞(𝑡)
-
Ecuaciones del observador de estado en
tiempo discreto
E. Interiano 21
𝐱(𝑘 + 1) = 𝐀𝑑 𝐱(𝑘) + 𝐁𝑑𝐮(𝑘) + 𝐊𝐟𝐂 𝐱(𝑘) − 𝐱(𝑘)
𝑦(𝑘) = 𝐂 ⋅ 𝐱(𝑘) + 𝐃𝑢(𝑘)
𝐞(𝑘 + 1) = 𝐱(𝑘 + 1) − 𝐱(𝑘 + 1) = (𝐀𝑑 − 𝐊𝐟𝐂)𝐞(𝑘)
𝐱(𝑘 + 1) − 𝐱(𝑘 + 1) = (𝐀𝑑 − 𝐊𝐟𝐂) 𝐱(𝑘) − 𝐱(𝑘)
-
Formas de cálculo de Kf
◼ Por sustitución directa de
◼ Por medio de la transformación a la forma FCO
◼ Por la fórmula de Ackerman para observador
E. Interiano 22
𝐊𝑓 =
𝑘𝑓1𝑘𝑓2⋮
𝑘𝑓𝑛
-
Transformación a FCO
Sea Q la matriz de transformación, con S la matriz de
observabilidad
Y con
E. Interiano 23
𝐐 = (𝐖𝐒)−𝟏
𝐖 =
𝑎1 𝑎2 • • • 𝑎𝑛−1 1𝑎2 𝑎3 • • • 1 0•••
•••
• •• •• •
𝑎𝑛−11
10
••
••
••
00
00
-
Transformación a FCO
◼ Se define como un nuevo vector de estado
◼ Si el sistema es observable, la matriz Q tiene inversa.
◼ Utilizando la matriz Q se puede transformar el sistema a
la
forma canónica observable:
E. Interiano 24
ො𝐱
𝐱 = 𝐐ො𝐱
ሶො𝐱 = 𝐐−𝟏𝐀𝐐ො𝐱 + 𝐐−𝟏𝐁𝐮
𝐲 = 𝐂𝐐ො𝐱 + 𝐃𝐮
-
La forma canónica observable
◼ Los elementos de las matrices y no están restringidos a
ninguna forma
E. Interiano 25
𝐀 =
0 0 . . 0 −𝑎01 0 . . 0 −𝑎10 1 . . 0 −𝑎2. . . . . .0 0 . . 1
−𝑎𝑛−1
𝐂 = 0 0 . . 0 1
𝐁 𝐃
-
Ecuación característica
La ecuación característica del observador se encuentra como
Donde Q-1 Kf de define como la matriz de coeficientes
Sustituyendo Q-1AQ, Q-1Kf y CQ en
E. Interiano 26
𝜆𝐈 − (𝐀 − 𝐊𝑓𝐂) = 𝐐−𝟏(𝜆𝐈 − (𝐀 − 𝐊𝑓𝐂))𝐐 = 𝜆𝐈 − 𝐐
−𝟏𝐀𝐐 + 𝐐−𝟏𝐊𝑓𝐂𝐐 = 𝟎
𝐐−1𝐊𝑓 =
𝛿0𝛿1⋮
𝛿𝑛−1
𝜆𝐈 − 𝐐−𝟏𝐀𝐐+ 𝐐−𝟏𝐊𝑓𝐂𝐐 = 0
-
Ecuación característica (2)
Obtenemos
E. Interiano 27
𝜆𝐈 −
0 0 0 ⋯ −𝑎01 0 0 ⋯ −𝑎10 1 0 ⋯ ⋮⋮ 0 ⋱ ⋯ −𝑎𝑛−20 0 ⋯ 1 −𝑎𝑛−1
+
𝛿0𝛿1⋮
𝛿𝑛−1
0 0 ⋯ 1 =
=
𝜆 0 0 ⋯ 𝑎0 + 𝛿0−1 𝜆 0 ⋯ 𝑎1 + 𝛿10 −1 𝜆 ⋯ ⋮⋮ 0 ⋱ ⋯ 𝑎𝑛−2 + 𝛿𝑛−20 0
⋯ −1 𝜆 + 𝑎𝑛−1 + 𝛿𝑛−1
=
= 𝜆𝑛 + (𝑎𝑛−1 + 𝛿𝑛−1)𝜆𝑛−1 +⋯(𝑎1 + 𝛿1)𝜆 + (𝑎0 + 𝛿0) = 0
-
La matriz Kf
Igualando los coeficientes del polinomio característico de
(A-KfC) con los
coeficientes de potencias iguales de obtenidos
Finalmente
E. Interiano 28
𝐊𝑓 = 𝐐
𝛿0𝛿1⋮
𝛿𝑛−1
𝐐−1𝐊𝑓 =
𝛿0𝛿1⋮
𝛿𝑛−1
⇒
(𝜆 − 𝜇1)(𝜆 − 𝜇2)⋯ (𝜆 − 𝜇𝑛) = 𝜆𝑛 + 𝛼𝑛−1𝜆
𝑛−1 +⋯𝛼1𝜆 + 𝛼0 = 0
𝑎0 + 𝛿0 = 𝛼0 ⇒ 𝛿0 = 𝛼0 − 𝑎0𝑎1 + 𝛿1 = 𝛼1 ⇒ 𝛿1 = 𝛼1 − 𝑎1⋮𝑎𝑛−1 +
𝛿𝑛−1 = 𝛼𝑛−1 ⇒ 𝛿𝑛−1= 𝛼𝑛−1 − 𝑎𝑛−1
𝐊𝑓 = 𝐐
𝛼0 − 𝑎0𝛼1 − 𝑎1
⋮𝛼𝑛−1 − 𝑎𝑛−1
-
Pasos para el diseño del observador por
transformación FCO
1. Verifique la condición de observabilidad del sistema con
S.
2. A partir del polinomio característico de la matriz A,
determine los valores de
3. Determine la matriz de transformación Q que transforma la
ecuación de estado del sistema a la forma canónica observable (si
ya esta en forma FCO, entonces Q = I).
4. Utilizando los valores propios i deseados para el observador,
halle el polinomio característico correspondiente
determine los valores de i5. Determine la matriz Kf de
ganancia
E. Interiano 29
𝜆𝐈 − 𝐀 = 𝜆𝑛 + 𝑎𝑛−1𝜆𝑛−1 +⋯+ 𝑎1𝜆 + 𝑎0
𝑎𝑖
(𝜆 − 𝜇1)(𝜆 − 𝜇2)⋯ (𝜆 − 𝜇𝑛) = 𝜆𝑛 + 𝛼𝑛−1𝜆
𝑛−1 +⋯𝛼1𝜆 + 𝛼0
𝐊𝑓 = 𝐐
𝛼0 − 𝑎0𝛼1 − 𝑎1
⋮𝛼𝑛−1 − 𝑎𝑛−1
-
Fórmula de Ackermann para observadores
◼ Para sistemas SISO, existe además de la sustitución directa y
la transformación aFCO, la forma sistemática dada por Ackermann
para calcular la matriz Kf
◼ φe(A) es el polinomio característico deseado para el estimador
u observador, evaluado en la matriz A, del sistema original
◼ Si el sistema es completamente observable, la matriz de
observabilidad Stiene rango n y es no singular.
E. Interiano 30
𝐊𝐟 = 𝛗𝐞(𝐀)
𝐂𝐂𝐀⋮
𝐂𝐀𝐧−𝟏
−1 00⋮1
-
Ejemplo 2: El controlador
◼El sistema
Ha sido realimentado de estado para ubicar los polos de lazo
cerrado en
Con K = [ 0.65 -0.3625] y K0 = 0.1712 para reducir el error
de
estado estacionario a cero (en ausencia del observador)
E. Interiano 31
𝐱(𝑘 + 1) =1.65 −0.6751 0
𝐱(𝑘) +10𝑢(𝑘)
𝑦(𝑘) = 1 0.825 𝐱(𝑘) T = 0.01s
𝜇1,2 = 0.5 ± 𝑗0.25
-
Ejemplo 2: El observador
El observador debe responder más rápido que la planta
realimentada por lo que los polos del observador se ubicarán
en
El polinomio característico del observador es
Comprobamos la observabilidad
E. Interiano 32
𝜑𝑒(𝑧) = 𝑧2 − 0.25𝑧 + 0.07813
𝜇1,2 = 0.125 ± 𝑗0.25
𝐒 =𝐂𝐂𝐀
=1 0.825
2.475 −0.675
-
Ejemplo 2: cálculo de φe(A)
Calculamos φe(A)
La matriz Kf
E. Interiano 33
𝛗𝐞(𝐀) = 𝐀𝟐 − 0.25𝐀 + 0.07813𝐈
𝛗𝐞(𝐀) =2.0475 −1.11381.65 −0.675
−0.4125 −0.16880.25 0
+0.0781 0
0 0.0781
𝛗𝐞(𝐀) =1.7131 −0.9451.4 −0.5969
𝐊𝐟 = 𝛗𝐞(𝐀) ⋅𝐂𝐂𝐀
−1 01
-
Ejemplo 2: El observador realimentado
Finalmente
La nueva matriz
Tiene E. Interiano 34
ෙ𝐀
ෙ𝐀 = 𝐀 − 𝐊𝐟𝐂 =1.65 −0.6751 0
−0.8680.6448
⋅ 1 0.825
ෙ𝐀 =0.7820 −1.39110.3552 −0.532
𝐊𝐟 =1.7131 −0.9451.4 −0.5969
⋅1 0.825
2.475 −0.675
−1 01
=0.8680.6448
𝜆1,2 = 0.125 ± 𝑗0.25
-
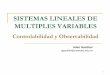
Ejemplo 2: Resultados
E. Interiano 35
Respuesta sistema compensado
Con K0 = 0.0837
Originales
Observador Sistemax
x
-
Ejemplo 2: Análisis de resultados
◼ Los polos de lazo cerrado se encuentran en el sitio deseado
para el
observador y para el sistema
◼ El error de estado estacionario es cero, ajustando K0 al valor
0.0837
◼ El tiempo de muestreo parece muy grande para la ubicación
deseada de
los polos de la planta
◼ El estimador es más rápido que el sistema realimentado en
estado y el
estado estimado se producirá con suficiente anticipación como
para que
pueda ser usado en la realimentación
E. Interiano 36
-
Estructura de la forma general del
compensador por real. estado
E. Interiano 37
ሶ𝐱 = 𝐀𝐱 + 𝐁𝑢𝑦 = 𝐂𝐱
Modelo del sistema
−𝐊
Ley de control
ሶ𝐱 = 𝐀𝐱 + 𝐁𝑢 + 𝐊𝐟Δ𝑦 +𝐌𝑟𝑦 = 𝐂𝐱
Observador
Nr u y
ũ
+
+
+
-
ỹ
Δ𝑦𝐱
-
Compensador realimentado en variables
de estado: Caso general.
◼ Las ecuaciones generales del compensador
◼ La ecuación para el error
E. Interiano 38
ሶ𝐱(𝑡) = 𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) + 𝐊𝐟Δ𝑦(𝑡) + 𝐌𝑟(𝑡)
𝑢(𝑡) = 𝑢(𝑡) + 𝐍𝑟(𝑡) = −𝐊𝐱(𝑡) + 𝐍𝑟(𝑡)
Δ𝑦(𝑡) = 𝑦(𝑡) − 𝐂 ⋅ 𝐱(𝑡)
ሶ𝐞(𝑡) = ሶ𝐱(𝑡) − ሶ𝐱(𝑡) = 𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) −[𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) + 𝐊𝐟Δ𝑦(𝑡)
+ 𝐌𝑟(𝑡)]
ሶ𝐞(𝑡) = 𝐀 − 𝐊𝐟𝐂 𝐞(𝑡) + 𝐁𝐍 −𝐌 𝑟(𝑡)
-
Compensadores y reguladores
◼ A un compensador en variables de estado sin entrada de
referencia se le llama regulador
◼ Si N y M son cero, las ecuaciones del compensador se
reducen a las del regulador.
◼ Para un sistema de una única entrada, N es un escalar, que
llamaremos K0, y M es un vector columna de longitud n.
E. Interiano 39
-
Compensador realimentado en variables
de estado: Caso 1
◼ Si N y M se seleccionan de forma tal que el error e(t) sea
independiente de r(t)
◼ Si escogemos K0 para hacer cero el error de estado
estacionario ante entrada escalón
E. Interiano 40
ሶ𝐞(𝑡) = 𝐀 − 𝐊𝐟𝐂 ⋅ 𝐞(𝑡) + 𝐁𝐾0 −𝐌 ⋅ 𝑟(𝑡)
𝐌 = 𝐁𝐾0
ሶ𝐞(𝑡) = 𝐀 − 𝐊𝐟𝐂 ⋅ 𝐞(𝑡)
ሶ𝐱(𝑡) = 𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) + 𝐊𝐟Δ𝑦(𝑡)
𝑢(𝑡) = −𝐊𝐱(𝑡) + 𝐾0𝑟(𝑡)
-
Estructura del caso 1
◼ El compensador se encuentra en el lazo de realimentación
E. Interiano 41
Modelo del sistema
ሶ𝐱 = 𝐀𝐱 + 𝐁𝑢𝑦 = 𝐂𝐱
−𝐊
Ley de control
ሶ𝐱 = 𝐀 − 𝐊𝐟𝐂 ⋅ 𝐱 + 𝐁𝑢 + 𝐊𝐟𝑦
Observador
K0r u y
ũ
+
+
𝐱
Compensador
-
El compensador con observador
Con M = BK0 las ecuaciones del compensador con observador de
estado
son
E. Interiano 42
ሶ𝐱(𝑡) = [𝐀 − 𝐁𝐊 − 𝐊𝐟𝐂] ⋅ 𝐱(𝑡) + 𝐊𝐟𝑦(𝑡)𝑢(𝑡) = −𝐊 ⋅ 𝐱(𝑡) +
𝑘0𝑟(𝑡)
𝑦(𝑡)𝑥(𝑡)𝑢(𝑡)𝑟(𝑡)
𝑥(𝑡)
-
La función de transferencia
◼ Como puede observarse de las ecuaciones, la salida del
controlador con observador es u(t) y la entrada es y(t).
◼ Aplicando la transformada de Laplace y despejando
◼ Este regulador se debe aplicar con realimentación positiva
y
se calcula de la misma forma para sistemas discretos
E. Interiano 43
𝐾(𝑠) =𝑈(𝑠)
𝑌(𝑠)= −𝐊 ⋅ [𝑠𝐈 − (𝐀 − 𝐁𝐊 − 𝐊𝐟𝐂)]
−1 ⋅ 𝐊𝐟
-
El compensador con observador en
tiempo discreto
Con M = BK0 las ecuaciones del controlador con observador
son:
Aplicando la transformada Z y despejando encontramos la función
de
transferencia, en tiempo discreto, del regulador con
observador
E. Interiano 44
𝐱(𝑘 + 1) = [𝐀𝑑 − 𝐁𝑑𝐊 − 𝐊𝐟𝐂] ⋅ 𝐱(𝑘) + 𝐊𝐟𝑦(𝑘)𝑢(𝑘) = −𝐊 ⋅ 𝐱(𝑘) +
𝑘0𝑟(𝑘)
𝐾(𝑧) =𝑈(𝑧)
𝑌(𝑧)= −𝐊 ⋅ [𝑧𝐈 − (𝐀𝑑 − 𝐁𝑑𝐊 − 𝐊𝐟𝐂)]
−1 ⋅ 𝐊𝐟
-
Ejemplo 3: Calcular G(z)
◼ Sea el sistema del ejemplo 1
E. Interiano 45
𝐱(𝑘 + 1) =1.65 −0.6751 0
𝐱(𝑘) +10𝑢(𝑘)
𝑦(𝑘) = 1 0.825 𝐱(𝑘) T = 0.01s
𝐊𝐟 =0.8680.6448𝐊 = 0.65 −0.3625
𝐾(𝑧) =𝑈(𝑧)
𝑌(𝑧)=−0.3305(𝑧 − 0.6412)
(𝑧2 + 0.4𝑧 + 0.2952)
-
Ejemplo 3: Cálculo de T(z)
La función de transferencia de lazo cerrado es
E. Interiano 46
𝑇(𝑧) =𝐺(𝑧)
1 − 𝐾(𝑧)𝐺(𝑧)
𝑇(𝑧) =
(𝑧 + 0.825)(𝑧2 − 1.65𝑧 + 0.675)
1 −−0.3305(𝑧 − 0.6412)(𝑧2 + 0.4𝑧 + 0.2952)
(𝑧 + 0.825)(𝑧2 − 1.65𝑧 + 0.675)
𝑇(𝑧) =(𝑧 + 0.825)(𝑧2 + 0.4𝑧 + 0.2952)
(𝑧2 − 𝑧 + 0.3125)(𝑧2 − 0.25𝑧 + 0.07812)
-
Ejemplo 3: Haciendo ess = 0
Encontramos la nueva constante K0 para el sistema
realimentado con observador
E. Interiano 47
𝐾0 =1
lim𝑧→1
𝑇 (𝑧)
𝐾0 =1
lim𝑧→1
(𝑧 + 0.825)(𝑧2 + 0.4𝑧 + 0.2952)(𝑧2 − 𝑧 + 0.3125)(𝑧2 − 0.25𝑧 +
0.07812)
𝐾0 = 0.0837
-
Ejemplo 3: Resultados
E. Interiano 48
Respuesta del sistema realimentado
en estado con la matriz –K, y
realimentado con observador.
Originales
Observador Sistema
-
Ejemplo 3: Análisis de resultados
◼ Hay una pequeña diferencia entre el sistema realimentado
con el estado y el sistema realimentado con observador de
estado; aunque ambos alcanzan el mismo valor final casi al
mismo tiempo y tienen ess = 0
◼ Puede observarse que el sistema en lazo cerrado T(z) tiene
4
polos, (color rojo), los dos del observador y los dos del
sistema realimentado; mostrados como polos de lazo abierto
para ganancia cero. Todos los polos se encuentran en las
ubicaciones escogidas y definidas por las matrices K y Kf.
E. Interiano 49
-
E. Interiano 50
-
Ejemplo 3: Análisis de resultados de
la simulación◼ Hay una pequeña diferencia entre las salidas del
sistema realimentado
con el estado observado y el sistema realimentado con
regulador;
aunque ambos alcanzan el mismo valor final casi al mismo tiempo
y
tienen ess = 0, el primero adelanta al segundo.
◼ Una vez transcurrido el transitorio, no hay diferencia entre
los estados
del sistema realimentado y los estados del observador.
◼ En las acciones de control, si existe una diferencia en el
valor final entre
la acción de control 𝑢1(𝑘) del sistema realimentado con el
estado delobservador y la acción de control 𝑢2(𝑘) del sistema
realimentado conregulador. Esto es debido principalmente a que el
regulador no recibe
u(k) directamente.E. Interiano 51
-
Compensador realimentado en variables de
estado: Caso 2
◼ Si seleccionamos N = 0 y M = -Kf
◼ El error será
E. Interiano 52
ሶ𝐞(𝑡) = 𝐀 − 𝐊𝐟𝐂 ⋅ 𝐞(𝑡) − 𝐌 ⋅ 𝑟(𝑡)
𝐌 = −𝐊𝐟
ሶ𝐱(𝑡) = 𝐀𝐱(𝑡) + 𝐁𝑢(𝑡) + 𝐊𝐟Δ𝑦(𝑡) − 𝐊𝐟𝑟(𝑡)
𝑢(𝑡) = −𝐊𝐱(𝑡)
ሶ𝐱(𝑡) = 𝐀 − 𝐁𝐊 − 𝐊𝐟𝐂 ⋅ 𝐱(𝑡) + 𝐊𝐟(𝑦(𝑡) − 𝑟(𝑡))
Δ𝑦(𝑡) = 𝑦(𝑡) − 𝐂 ⋅ 𝐱(𝑡)
ሶ𝐞(𝑡) = 𝐀 − 𝐊𝐟𝐂 ⋅ 𝐞(𝑡) + 𝐊𝐟 ⋅ 𝑟(𝑡)
-
Estructura del caso 2
◼ El compensador se encuentra en el camino directo con
realimentación unitaria
E. Interiano 53
+
-
ሶ𝐱 = 𝐀𝐱 + 𝐁𝑢𝑦 = 𝐂𝐱
Modelo del sistema
−𝐊
Ley de control
ሶ𝐱 = (𝐀 − 𝐁𝐊 − 𝐊𝐟𝐂)𝐱 +𝐊𝐟(𝑦 − 𝑟)
Observador
r(t) u y(t)
Compensador
-
Ejercicios
1. Encuentre si el sistema discreto mostrado, con T = 0.01s,
es
controlable y observable.
2. Haga que el sistema tenga los polos de lazo cerrado
ubicados en = 0.6 +/- 0.25j y que tenga error de estado
estacionario cero ante un escalón en la entrada r(k)
E. Interiano 54
𝑥(𝑘 + 1) =0.9319 −0.024140.03863 0.99951
⋅ 𝑥(𝑘) +0.019310.0003908
⋅ 𝑢
𝑦(𝑘) = 0 1.25 ⋅ 𝑥(𝑘)
-
Ejercicios (2)
◼ Verifique el cálculo de la matriz K y el escalar K0 para
el
ejemplo 1.
◼ Para el sistema mostrado, diseñe un regulador con
observador que haga que los polos de lazo cerrado del
sistema se ubiquen en = -1.5 j2.
E. Interiano 55
ሶ𝐱 =0 1
20.6 0𝐱 +
01𝑢
𝑦 = 1 0 𝐱
-
Ejercicios (3)
Para el sistema mostrado, diseñe un compensador discreto con
observador que tenga respuesta dead-beat, (polos en z = 0) y
que haga que los polos de lazo cerrado del sistema se
ubiquen
en . Calcule además K0 para eliminar el error
de estado estacionario ante una entrada escalón
E. Interiano 56
𝐱(𝑘 + 1) =−0.35 −1.3751 2
𝐱(𝑘) +10𝑢(𝑘)
𝑦(𝑘) = 1 2.825 𝐱(𝑘) T = 0.01s
𝜇1,2 = 0.7 ± 𝑗0.25
-
Ejercicios (4)
◼ Para la estructura del caso 2, encuentre la función de
transferencia del compensador
◼ ¿Encuentre el error de estado estacionario para entrada
escalón para el caso 2?
◼ ¿Será posible para el caso 2, hacer que el error de estado
estacionario ante entrada escalón sea 0?
E. Interiano 57
-
Tarea
◼ Investigue que es un observador de estado incompleto o de
orden
reducido y cuándo puede ser aplicado.
◼ Investigue qué es el principio de dualidad de Kalman.
◼ ¿Qué establece el principio de separación de Kalman? ¿Cómo
se
prueba?
◼ Demuestre la fórmula de Ackerman para K
◼ ¿Cuán rápidos deben ser los polos del observador de
Luenberger
respecto a los de la planta?
◼ ¿Cuál tipo de observador resuelve el problema del observador
en
presencia de ruido?
E. Interiano 58
-
Referencias
[1] Ogata, Katsuhiko. „Ingeniería de Control Moderna“, Pearson,
Prentice Hall, 2003, 4ª Ed., Madrid.
[2] Ogata, Katsuhiko. „Sistemas de Control en tiempo discreto“,
Prentice Hall, 1996, 2ª Ed., México.
[3] Dorf, Richard, Bishop Robert. „Sistemas de control moderno“,
10ª Ed., Prentice Hall, 2005, España.
[4] http://en.wikipedia.org/wiki/State_observer
[5]http://www.stanford.edu/dept/MSandE/people/faculty/luenberger/articles/otsoals.pdf
E. Interiano 59
http://en.wikipedia.org/wiki/State_observerhttp://www.stanford.edu/dept/MSandE/people/faculty/luenberger/articles/otsoals.pdf









![SESIÓN ÁLGEBRA - UM · tóricas en Geometría Algebraica. Recientemente, Ando, Esterov y Takeuchi [2] han probado una fórmula para el polinomio característico de la monodromía](https://img.pdfslide.tips/doc/110x75/5e7cee66273cde575c373e64/sesin-lgebra-um-tricas-en-geometra-algebraica-recientemente-ando-esterov.jpg)