-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
1/95
UNIVERSIDAD AUTNOMA DE ZACATECAS
CONTROL PID DE LA VELOCIDAD DE UNA BANDA TRANSPORTADORA PARA
LA CLASIFICACIN DE OBJETOS
Adriana Melissa Del Carmen Jaime y Cindy Valeria Hernndez
Ramrez
Tesis de Licenciatura
presentada a la Unidad Acadmica de Ingeniera Elctricade acuerdo
a los requerimientos de la Universidad para obtener el ttulo de
INGENIERO EN COMUNICACIONES Y ELECTRNICA
Directores de tesis:
Dr. Rafael Villela Varela y M. en I. Claudia Reyes Rivas
UNIDAD ACADMICA DE INGENIERA ELCTRICA
Zacatecas, Zac., 30 de mayo de 2008
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
2/95
APROBACIN DE EXAMEN PROFESIONAL
Se aprueba por unanimidad el Examen Profesional de Adriana
Melissa Del Carmen Jaime
y Cindy Valeria Hernndez Ramrez presentado el 30 de mayo de 2008
para obtener el ttulo
de:
INGENIERO EN COMUNICACIONES Y ELECTRNICA
Jurado:
Presidente: Dr. Rafael Villela Varela
Primer vocal: M. en I. Claudia Reyes Rivas
Segundo vocal: M. en C. Miguel Eduardo Gonzlez Elas
Tercer vocal: M. en I. Aurelio Beltrn Tllez
Cuarto vocal: Ing. Alejandro Chacn
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
3/95
RESUMEN
La finalidad de este proyecto de tesis es implementar un sistema
de control PID para un
motor de corriente directa con tacogenerador el cual se encarga
de mover una banda trans-
portadora que mantiene una velocidad constante dependiendo del
valor deseado de objetos a
transportar.
Esto se ejecuta por medio de la programacin del controlador
lgico programable S7-200 de
Siemens. La lectura de la velocidad la proporciona un display
electrnico, el cual nos muestra
las revoluciones por minuto a las que gira el motor.
Como el motor es de un voltaje de 0 a 24 volts y la salida del
PLC solo nos entrega 10 volts,
se agreg una etapa de potencia que da como resultado los 24
volts. Tambin se le incluy un
convertidor de frecuencia a voltaje ya que el motor entrega
frecuencia y lo que se necesita para
el proyecto es voltaje.
Como una aplicacin extra se agregaron dos sensores, uno de ellos
se encargar de clasificar
los objetos respecto al tamao, en grandes y chicos. El otro
funcionar como contador, para
mostrar cuantos objetos grandes y cuantos objetos chicos han
sido clasificados. El contador
tambin podr ser visualizado en el display electrnico.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
4/95
iii
Cindy Valeria Hernndez Ramrez
A mis padres:
Ya que me apoyan y me impulsan a seguir adelante, les agradezco
todo lo que me han dado y
todo lo que han hecho por m, sin ustedes no seria la persona que
soy y no estara aqu en este
momento.
A mis hermanas:
Que me han ayudado en todo y se que siempre podr contar con
ellas.
A ustedes cuatro les dedico todos mis logros y solo les quiero
decir gracias por todo.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
5/95
iv
Adriana Melissa Del Carmen Jaime
A mis padres:
Que me brindaron todo su apoyo a lo largo de toda mi vida,
principalmente cuando decid
irme a estudiar fuera de mi ciudad natal, gracias por haber
estado siempre cuando los necesit.
A mi hermano:
Que es la motivacin para alcanzar mis metas en educacin ya que
siento que le dejo un buen
ejemplo a mi nico hermano.
A mi novio:
Que siempre fue un apoyo incondicional a lo largo de toda mi
carrera.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
6/95
v
Agradecimientos
Queremos agradecer principalmente a nuestro asesor el Dr. en E.
Rafael Villela Varela, ya
que desde un principio nos apoy y nos resolvi todas las dudas
que surgieron en el transcurso
de la elaboracin de la tesis, gracias por mostrarse siempre
optimista ante cualquier situacin
y queremos decir que sin su ayuda no se hubiese podido lograr la
meta propuesta.
Tambin queremos dar gracias a nuestra asesora la M. en I.
Claudia Reyes Rivas por su
colaboracin en la realizacin de ste proyecto.
Al igual queremos dar un agradecimiento especial al Ing. Antonio
Sosa por toda la ayuda
que nos brind. As como tambin al M. en C. Eduardo Gonzlez Elas
que a pesar de no haber
sido asesor nuestro, siempre resolvi nuestras dudas.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
7/95
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
8/95
vii
Pag.
3 Parte Experimental . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 28
3.1 Construccin de la Banda Transportadora . . . . . . . . . . .
. . . . . . . . . 283.2 Adecuacin del Motor al Proyecto . . . . . .
. . . . . . . . . . . . . . . . . . 30
3.2.1 Detector ptico Acoplado . . . . . . . . . . . . . . . . .
. . . . . . . 313.3 Convertidor de Frecuencia a Voltaje . . . . . .
. . . . . . . . . . . . . . . . . 333.4 Etapa de Potencia . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.5
Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 393.6 Modelado Matemtico . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 413.7 Diseo del Controlador PID .
. . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.7.1 Mtodo de Cancelacin de Polos. . . . . . . . . . . . . . .
. . . . . . 44
4 Aplicacin del Sistema . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 47
4.1 Sensores pticos . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 474.1.1 Funcionamiento . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 48
4.2 Selector . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 504.3 Cajas/minuto . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 51
5 Programacin en el PLC S7-200 . . . . . . . . . . . . . . . . .
. . . . . . . . . . 52
5.1 Adecuacin de las variables de entrada analgicas a memorias
normalizadas
en el PLC . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 525.2 Direcciones del PLC . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 535.3 Programa . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
6 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 63
6.1 Recomendaciones . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 66
Apndices
Apndice A: Hojas de datos . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 67
Apndice B: Manual del Operador . . . . . . . . . . . . . . . . .
. . . . . . . . 79
Referencias . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 81
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
9/95
viii
Lista de figuras
Figura Pag.
2.1 Banda Transportadora. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 7
2.2 Elementos constituyentes de los sistemas a lazo abierto y a
lazo cerrado.. . . . . . 10
2.3 Sistema en lazo cerrado. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 12
2.4 Lazo bsico de control SISO.. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 13
2.5 Diagrama de bloques del sistema controlado. . . . . . . . .
. . . . . . . . . . . . 16
2.6 Diagrama de bloques del autmata programable. . . . . . . . .
. . . . . . . . . . 20
2.7 Componentes principales de un PLC. . . . . . . . . . . . . .
. . . . . . . . . . . 23
2.8 Estructura tpica de la memoria del autmata. . . . . . . . .
. . . . . . . . . . . . 242.9 Bus interno del autmata. . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 24
2.10 Ventajas y desventajas del PLC. . . . . . . . . . . . . . .
. . . . . . . . . . . . . 25
2.11 PLC S7-200. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 27
3.1 Banda transportadora de nuestro proyecto.. . . . . . . . . .
. . . . . . . . . . . . 29
3.2 Motor del proyecto.. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 30
3.3 Disco. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 31
3.4 Detector ptico acoplado. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 31
3.5 Diagrama del sensor con el convertidor. . . . . . . . . . .
. . . . . . . . . . . . . 33
3.6 Diagrama de conexin del motor al LM2907. . . . . . . . . . .
. . . . . . . . . . 36
3.7 Convertidor de nuestro proyecto.. . . . . . . . . . . . . .
. . . . . . . . . . . . . 36
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
10/95
ix
Figura Pag.
3.8 Diagrama de la Etapa de Potencia. . . . . . . . . . . . . .
. . . . . . . . . . . . . 38
3.9 Etapa de Potencia de nuestro proyecto. . . . . . . . . . . .
. . . . . . . . . . . . 38
3.10 Configuracin del decodificador 74LS48 y del display ctodo
comn. . . . . . . . 39
3.11 Diagrama esquemtico de los displays. . . . . . . . . . . .
. . . . . . . . . . . . 40
3.12 Display de nuestro proyecto. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 40
3.13 Bloques de la conexin. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 41
3.14 Grfica del modelado. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 41
3.15 Simulacin del modelo matemtico. . . . . . . . . . . . . . .
. . . . . . . . . . . 43
3.16 Simulacin del sistema controlado, con los valores del
control PI. . . . . . . . . . 46
4.1 Diagrama de los sensores pticos. . . . . . . . . . . . . . .
. . . . . . . . . . . . 48
4.2 Sensor del proyecto. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 49
4.3 Selector de cajas del proyecto. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 50
4.4 Diagrama de los relevadores. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 51
5.1 Direcciones de Proceso. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 53
5.2 Direcciones de la etapa de potencia. . . . . . . . . . . . .
. . . . . . . . . . . . . 53
5.3 Direcciones del valor deseado. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 53
5.4 Direcciones del display. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 53
5.5 Principal . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 545.6 Subrutina . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.7 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 56
5.8 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 57
5.9 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 58
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
11/95
x
Figura Pag.
5.10 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 59
5.11 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 60
5.12 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 61
5.13 Interrupcin. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 62
A.1 ITR8102 . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 67
A.2 LM2907 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 68
A.3 LM2907 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 69
A.4 LM2907 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 70
A.5 LM324 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 71
A.6 LM324 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 72
A.7 LM324 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 73
A.8 TIP41 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 74
A.9 TIP35 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 75
A.10 74LS48 . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 76
A.11 74LS48 . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 77
A.12 BC546 . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 78
B.1 Tablero de Control. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 79
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
12/95
xi
Lista de tablas
Tabla Pag.
2.1 Efectos de cada uno de los controladores Kp, Kd, y Ki en un
sistema a lazo cerrado. 14
3.1 Comportamiento del eje del motor.. . . . . . . . . . . . . .
. . . . . . . . . . . . 32
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
13/95
Captulo 1
Introduccin
En este trabajo se pretende trabajar con el controlador PID para
su utilizacin en el manejo
de la velocidad de un motor de corriente continua para controlar
una banda transportadora con
la ayuda del PLC S7-200 de SIEMENS.
1.1 Antecedentes
A lo largo de la historia, se han desarrollado y perfeccionado
tcnicas que han hecho del
control automtico toda un rea de investigacin y desarrollo,
orientada a reducir costos de
procesos, aumentar calidad de artculos, mejorar precisin de
productos, e incrementar niveles
de seguridad, entre otros.
El control de velocidad sobre motores de C.D., no es algo nuevo
hoy en da, ya son varias
dcadas en las que se ha trabajado en esto, se han aplicado
diferentes procedimientos de con-
trol, los cuales arrojaron resultados satisfactorios en dcadas
anteriores con un equipo (software
y hardware) lento y de baja precisin.
Ahora el control ha evolucionado tanto en los procedimientos de
control, como en software
y hardware, en donde la velocidad y precisin son cada vez
mayores.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
14/95
2
1.2 Justificacin
En el mbito industrial siempre es necesario controlar los
procesos o sistemas de produc-cin, en variables como posicin,
velocidad, fuerza, temperatura, etc. De tal manera que en
estos haya el mnimo de errores y la mayor exactitud y
eficiencia.
La complejidad de los sistemas de manufactura debido al avance
tecnolgico y a la de-
manda del mercado, requiere de un constante anlisis con el
objetivo de mejorar el desempeo
del sistema de produccin. Dicho anlisis debe dar respuestas
inmediatas, para lo cual el uso
del computador y las tcnicas de simulacin son bastante
eficientes en este propsito.
El control de la velocidad nos ofrece un amplio campo de
aplicaciones del control auto-
mtico, por ejemplo en esta tesis el control de la velocidad
depender del valor deseado de
objetos a transportar en el tiempo preestablecido y finalmente
esto servir para que los objetos
se transporten en una velocidad precisa para su correcta
clasificacin.
1.3 Preguntas de Investigacin
1. Es posible hacer un modelado matemtico de la banda
transportadora, el motor y los
circuitos electrnicos, todo el sistema en conjunto?
2. Es posible visualizar la velocidad de la banda transportadora
en tiempo real por medio
de un display?
3. Es posible implementarle una aplicacin real a la banda
transportadora?
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
15/95
3
1.4 Hiptesis
El modelo matemtico se obtendr con el motor y los circuitos
electrnicos conectados ala banda transportadora, esto para que no
exista variacin alguna entre el comportamiento real
de la banda y el modelado matemtico.
Se tiene como objetivo darle una aplicacin real a la banda
transportadora, la cual sera
detectar objetos por medio de sensores y as posteriormente
clasificarlos en dos contenedores
diferentes. La correcta clasificacin se basar en las condiciones
predefinidas para el uso del
sensor. En sta tesis se incluirn dos sensores para dos
diferentes aplicaciones.
Tambin se planea implementar un display electrnico para
visualizar la velocidad de la
banda transportadora obteniendo una lectura en tiempo real, as
como tambin para poder vi-
sualizar el numero de cajas grandes y cajas chicas que han sido
detectadas por los sensores.
Esto se realizar en un mismo display electrnico, pero se ofrecer
la opcin de elegir cual
forma se quiere visualizar.
La hiptesis a probar es: Si es posible disear y construir un
control automtico de veloci-
dad para una banda transportadora que permita clasificar
objetos.
1.5 Objetivos
a) Objetivo General
Disear y construir un control automtico de velocidad para una
banda transportadora que
permita clasificar objetos y conducirlos de manera efectiva
hacia el final del proceso.
Este objetivo est enfocado a la industria y para lograrlo se har
uso de todo lo aprendido en la
carrera de Ingeniera en Comunicaciones y Electrnica.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
16/95
4
b) Objetivos Particulares
Construir una banda transportadora que funcione como prototipo
para la aplicacin de
este proyecto.
Obtener el modelo matemtico de forma experimental.
Disear e implementar el control PID de la velocidad de la banda
transportadora, con la
ayuda de la circuitera electrnica necesaria y la programacin en
el PLC.
Agregar mejoras respecto de las tesis antes hechas en esta
Unidad Acadmica de Inge-
niera sobre el control de velocidad de una banda
transportadora.
Usar el PLC en una aplicacin tpica industrial de control.
1.6 Alcance del Proyecto
Este proyecto se llevar a cabo a partir de la construccin de un
prototipo de una banda
transportadora, con las dimensiones de 70 cm de largo y 30 cm de
ancho, impulsada por unmotor de corriente directa SF7370
DSM-0200-2AU de 24V y modelo RMOTVO643FC, con
esto se planea realizar el control PID de la velocidad de la
banda transportadora, as como,
la programacin por medio del PLC S7-200 de SIEMENS. Otro
propsito a cumplir es el de
darle una aplicacin real a la banda transportadora con el uso de
sensores, esto con el fin de
clasificar objetos.
1.7 Vialidad del ProyectoEsta tesis es viable, ya que contamos
con la ayuda de dispositivos electrnicos avanzados
como lo es el PLC, el software utilizado es de fcil operacin, el
motor cuenta con un foto
reductor el cual le proporciona ms fuerza y ms estabilidad, se
cuenta con el apoyo en las tesis
antes hechas sobre control de velocidad de motores de corriente
continua y principalmente con
la asesora de profesores expertos en el tema.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
17/95
5
1.8 Contenido
Captulo 1: Se describe toda la introduccin de la realizacin de
esta tesis incluidos los an-tecedentes del tema, la justificacin,
las preguntas de investigacin con su respectiva hiptesis,
los objetivos generales y particulares as como el alcance y la
viabilidad del proyecto.
Captulo 2: Se incluye la informacin terica acerca de toda la
tesis, se da una explicacin
entendible sobre qu son y cmo funcionan los componentes
utilizados en ste proyecto.
Captulo 3: Se explica toda la parte prctica de sta tesis, desde
el aspecto mecnico, elec-trnico y de programacin, tambin se
incluyen todos los clculos matemticos, diagramas
electrnicos, grficas, etc.
Captulo 4: Se describe todo lo relacionado a la aplicacin real
de nuestro proyecto, com-
prendiendo la teora, los circuitos y la programacin
utilizada.
Captulo 5: Se incluye todo el programa llevado a cabo en el PLC
S7-200 de SIEMENS.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
18/95
Captulo 2
Marco Terico
2.1 Banda Transportadora
Una parte muy comn en los sistemas automatizados son las bandas
transportadoras, stas
se encargan de llevar los productos de una fase a otra del
proceso de produccin, o en muchos
casos son la base principal de ste, como es el caso de la
produccin en serie.
Las bandas transportadoras mueven grandes cantidades de
materiales con rapidez y seguri-
dad. Permiten que los trabajadores reduzcan la cantidad de
materiales que se manejan a mano
aumentando as la capacidad de trabajo y el rendimiento de la
produccin.
En su forma ms elemental, consisten en una banda que recibe su
traccin mediante rodi-
llos especiales los cuales a su vez son conducidos por
motorreductores. La banda es fabricada,
segn su aplicacin, con materiales y dimensiones diferentes y
sirve directa o indirectamente
para transportar los materiales.
La mayor parte de las veces las bandas son movilizadas por
motores elctricos, stos pueden
presentar una variacin de velocidad al aumentar o disminuir el
peso sobre la banda, de tal ma-
nera que es necesario aplicar una regulacin a ste, es decir, un
controlador.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
19/95
7
Figura 2.1 Banda Transportadora.
2.2 Motor de Corriente Directa
El motor de corriente continua es una mquina que convierte la
energa elctrica en mecnica,
principalmente mediante el movimiento rotativo.
Los motores de corriente continua son adecuados para
aplicaciones en donde se necesita
velocidad constante a cualquier ajuste del control o en los
casos en que es necesario un rango
apreciable de velocidades.
A diferencia de los motores de pasos y los servomecanismos, los
motores DC no pueden ser
posicionados y/o enclavados en una posicin especfica. Estos
simplemente giran a la mxima
velocidad y en el sentido que la alimentacin aplicada se los
permite.
2.2.1 Tacmetro Electrnico
Para lograr controlar la velocidad del motor elctrico se hace
importante examinar los com-
ponentes con los que se cuentan, para poder saber que circuitos
debern ser implementados paraponer en marcha el controlador en lazo
cerrado de velocidad. El ms importante, es el circuito
para medir la velocidad del motor, el tacmetro, dado que de l
depender como responder el
controlador diseado. Este ser el sensor de velocidad del
motor.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
20/95
8
En sistemas convencionales de control se presentan errores entre
la velocidad de referencia
y la velocidad real de giro, ya que se ven afectados por
corrientes de aire, cambios de tempera-
tura, humedad, inercia del dispositivo, etc. Por lo que se hace
necesaria la implementacin de
un sensor que no se vea afectado por estas variables. El sistema
convencional de medicin de
velocidad se da cuando al motor DC se le acopla un tacogenerador
en su eje.
Un mejor sensor de velocidad del motor se da cuando se coloca un
disco perforado sobre
el eje conteniendo en su orilla N lneas radiales. El disco se
mueve libremente a travs de un
fotointerruptor, del cual se obtendr una onda cuadrada con una
frecuencia de salida propor-
cional a la velocidad del eje del motor DC.
El tacmetro ptico es un buen transductor de velocidad operando a
bajas RPM. Adems
es muy estable y exacto con respecto a seales de frecuencia, es
ajustable continuamente de
acuerdo a los cambios en la frecuencia de referencia. Con esto
se garantizar que el motor
DC tendr alto par de arranque y control de velocidad por
reduccin o aumento de voltaje de
alimentacin.
El tacmetro ptico es usado para tomar la seal de realimentacin.
La baja inercia de este
transductor, el bajo ruido, la alta resolucin y la buena
exactitud facilitan el control del motor
de corriente directa.
2.2.2 PID en Motores
El controlador PID es el ms usado por su seguridad y
versatilidad, y no es la excepcin en
el control de motores de C.C. Debido a la naturaleza ms o menos
lineal de estos, su modelo
matemtico es relativamente simple ya que slo contiene un polo,
por lo cul no es necesario
totalmente la parte derivativa del controlador, es ms prctico y
muy funcional usar solamente
un control PI, esto facilita tambin su clculo matemtico y la
definicin de las variables, ya
sea por criterio de Ruth o por cancelacin de polos.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
21/95
9
Los motores de C.C. reaccionan excelentemente al controlador PID
creando una respuesta
casi lineal y alcanzando la velocidad deseada de una manera
rpida y segura con mucha es-
tabilidad an cuando la parte derivativa se lleve a cero, lo cual
hace al PID una alternativa de
control para los motores de C.C. muy fiable.
El control PID es aplicado de manera relativamente sencilla, en
el caso de querer controlar
la velocidad de ste son necesarios unos cuantos elementos:
Es necesario tener una manera de transformar la variable de
velocidad a una variable
elctrica, esto es crear un sensor que nos entregue la velocidad
del motor en forma devoltaje.
Una vez que se tiene la variable de velocidad en voltaje, sta se
compara y el controlador
manda una seal de control segn el error entre el valor deseado y
el sensado, pasando
por una etapa de potencia, que es necesaria en la mayora de los
casos.
2.3 Control de Procesos
El control automtico es de vital importancia en el mundo de la
ingeniera. Adems de
resultar imprescindible en sistemas robticos o procesos de
manufactura moderna, entre otras
aplicaciones, se ha vuelto esencial en operaciones industriales
como el control de presin, tem-
peratura, humedad, viscosidad, y flujo en las industrias de
transformacin.
Los sistemas de controles pueden ser a lazo abierto o a lazo
cerrado. Los primeros son
manuales pues requieren que una persona ejecute una accin que
indique al sistema qu hacer.
Los segundos son automticos y operan sin interrupcin, ni
participacin externa.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
22/95
10
2.3.1 Elementos Constituyentes de los Sistemas a Lazo Abierto y
a LazoCerrado
La figura 2.2 muestra los elementos de un sistema a lazo
cerrado. Cada bloque representa
un elemento del sistema y ejecuta una funcin en la operacin de
control. Las lneas entre los
bloques muestran las seales de entrada y salida de cada
elemento, y las flechas, la secuencia
de acciones en el orden en que ocurren.
Figura 2.2 Elementos constituyentes de los sistemas a lazo
abierto y a lazo cerrado.
Variable controlada. Se refiere a la variable cuyo valor debe
mantenerse igual al de refe-
rencia, durante el proceso.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
23/95
11
Variable medida. Es el valor de la variable que se desea
controlar. Para hacerlo, es nece-
sario conocer su valor en el proceso y compararlo con el valor
de referencia.
Instrumento de medida. Mide la variable que deseamos controlar y
produce una seal de
salida que especifica el valor de esta variable. No existe en
sistemas a lazo abierto.
Seal de retroalimentacin. Es la salida del instrumento de
medida. No existe en los sis-
temas a lazo abierto.
Valor de referencia (Set point). Es el valor deseado de la
variable controlada.
Detector de error. Compara el valor de referencia con el valor
medido de la variable con-
trolada.
Seal de error. Es la salida del detector de error. Provee el
valor de la diferencia entre el
valor deseado y el medido.
Controlador. Recibe la seal de error y produce los ajustes
necesarios para minimizarla.
Actuador. Es un aparato o instrumento que ejecuta las acciones
que conducen a la variable
controlada a adquirir el valor de referencia. Variable
manipulada. Es la variable que se mani-
pula para cambiar las condiciones de la variable controlada.
Proceso de manufactura. Es el que culmina con la produccin del
artculo deseado.
Perturbacin. Es cualquier factor responsable de cambiar el valor
de la variable controlada
y que est fuera del control del sistema.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
24/95
12
2.4 Control PID
Un controlador PID es un sistema de control que, mediante un
actuador, es capaz de man-tener una variable o proceso en un punto
deseado dentro del rango de medicin del sensor que
la mide. Es uno de los mtodos de control ms frecuentes y
precisos dentro de la regulacin
automtica.
Actualmente, el controlador PID es an el ms ampliamente
utilizado en la industria mo-
derna, controlando ms del 95 por ciento de los procesos
industriales en lazo cerrado.
El control Proporcional Integral Derivativo es la solucin ideal
para sistemas de control que
deseen corregir su respuesta tanto en el transitorio como en el
rgimen estacionario ofrecin-
donos una gran libertad de accin al tener tres parmetros (Kp, Ki
y Kd) con los que ajustar el
lazo de control.
Un regulador PID tiene en cuenta el error, la integral del error
y la derivada del error.
Los valores de las constantes, que reciben el nombre de
constante proporcional, integral yderivativa, definen el
comportamiento del regulador.
Figura 2.3 Sistema en lazo cerrado.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
25/95
13
2.4.1 Estructura PID
Consideramos el lazo bsico de control SISO:
Figura 2.4 Lazo bsico de control SISO.
Las formas estndar de controladores PID:
Proporcional:
P =Kp (2.1)
Donde:Kpes la ganancia de la parte proporcional.
Proporcional e Integral:
P I=Kp(1 + 1
Ki) (2.2)
Donde:Kies la ganancia de la parte integral.
Proporcional y Derivativo:
P D= Kp(1 + Kd
Kd+ 1
) (2.3)
Donde:Kdes la ganancia de la parte derivativa.
Proporcional, Integral y Derivativo:
P ID= Kp(1 + 1
Ki+
KdKd+ 1
) (2.4)
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
26/95
14
2.4.2 El Controlador de Tres Trminos
La funcin de transferencia del controlador PID se escribe
como:
Vc(s)
E(s) =
Kps
(s+ 1
Ti)Gc(s) =Kp+Kd(s) +
Kis
= (1 +Kd(s))(Kp2+K i2
s ) (2.5)
La constante proporcional de la parte PD se hace unitaria, ya
que solo se necesitan tres
parmetros en el controlador PID. Al igualar ambos miembros de la
ecuacin anterior, se tiene:
Kp= Kp2+Kd1KI2 (2.6)
Kd= Kd1Kp2 (2.7)
KI=KI2 (2.8)
2.4.3 Las caractersticas de los controladores P, I, y D
Un controlador proporcional (Kp) tendr el efecto de reducir el
tiempo de elevacin y
reducir, sin jams eliminar, el error de estado estacionario.
Un control integral (Ki) tendr el efecto de eliminar el error de
estado estacionario, pero
puede empeorar la respuesta transitoria.
Un control derivativo (Kd) tendr el efecto de incrementar la
estabilidad del sistema, re-
duciendo el sobrepico, y mejorando la respuesta transitoria.
Tabla 2.1 Efectos de cada uno de los controladores Kp, Kd, y Ki
en un sistema a lazo cerrado.
Lazo Cerrado T. Trepada Sobrepico T. Establecimiento Error
(ss)
Kp Baja Sube Poco Cambio Baja
Ki Baja Sube Sube Elimina
Kd Poco Cambio Baja Baja Poco Cambio
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
27/95
15
2.4.3.1 Proporcional
La parte proporcional consiste en el producto entre la seal de
error y la constante propor-
cional. Esta componente PID toma un papel importante cuando la
seal de error es grande,
pero su accin se ve mermada con la disminucin de dicha seal.
La constante proporcional determinar el error permanente, siendo
ste menor cuanto mayor
sea el valor de la constante proporcional. Sin embargo, existe
tambin un valor lmite en la
constante proporcional a partir del cual, en algunos casos, el
sistema alcanza valores superio-
res a los deseados. Este fenmeno se llama sobreoscilacin y, por
razones de seguridad, no
debe sobrepasar el 30 por ciento, aunque es conveniente que la
parte proporcional ni siquiera
produzca sobreoscilacin.
La parte proporcional no considera el tiempo, por tanto la mejor
manera de solucionar el
error permanente y hacer que el sistema contenga alguna
componente que tenga en cuenta la
variacin con respecto al tiempo es incluyendo y configurando las
acciones integral y deriva-
tiva.
2.4.3.2 Integral
El modo de control Integral tiene como propsito disminuir y
eliminar el error en estado
estacionario, provocado por el modo proporcional.
El error es integrado, lo cual tiene la funcin de promediarlo o
sumarlo por un perodo de
tiempo determinado; luego es multiplicado por una constante I,
que representa la constante
de integracin. Posteriormente, la respuesta integral es
adicionada al modo Proporcional para
formar el control PI con el propsito de obtener una respuesta
estable del sistema sin error
estacionario.
La ganancia total del lazo de control debe ser menor a 1, y as
inducir una atenuacin en la
salida del controlador para conducir el proceso a estabilidad
del mismo.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
28/95
16
2.4.3.3 Derivativo
La accin derivativa se manifiesta cuando hay un cambio en el
valor absoluto del error,
si el error es constante, solamente actan los modos proporcional
e integral. El error es la
desviacin existente entre el punto de medida y el valor
consigna, o Set Point".
La funcin de la accin derivativa es mantener el error al mnimo
corrigindolo propor-
cionalmente con la velocidad misma que se produce, de esta
manera evita que el error se
incremente.
Se deriva con respecto al tiempo y se multiplica por una
constante D y luego se suma a las
seales anteriores (PI).
Como en cualquier regulador, se pueden ajustar los parmetros
proporcional, integral y
diferencial para hacer que el comportamiento del sistema sea el
deseado. Pero como carac-
terstica especial, el regulador permite utilizar dos valores
distintos para cada uno de estos
parmetros, en funcin de que la seal de salida se encuentre por
encima o por debajo de la
seal de referencia.
Figura 2.5 Diagrama de bloques del sistema controlado.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
29/95
17
En donde:
La seal de salida, y, corresponde a la salida del terminal mvil
del motor.
La seal de referencia, r, corresponde a la posicin deseada.
La seal de error, e, corresponde a la diferencia entre la seal
de referencia y la seal de
salida.
La seal de control, u, corresponde al voltaje producido por el
controlador para disminuir
o anular el error.
Una vez definido el modelo del PID se puede ajustar el
controlador. El siguiente paso es
determinar un modelo matemtico para la planta y poder as obtener
los parmetros necesarios
para ajustar este.
2.5 Modelado Matemtico
En ciencias aplicadas un modelo matemtico es uno de los tipos de
modelos cientficos, y se
basa en expresar utilizando los instrumentos de la teora
matemtica, declaraciones, relaciones,
proposiciones sustantivas de hechos o de contenidos simblicos,
estn implicadas variables, pa-
rmetros, y entidades, para estudiar comportamientos de sistemas
complejos ante situaciones
difciles de observar en la realidad.
Se podra decir tambin que sirve para estudiar el comportamiento
de sistemas complejos,
y posteriormente hacer el camino inverso para traducir los
resultados numricos a la realidad
fsica. Generalmente se introducen simplificaciones de
realidad.
Para poder realizar los clculos de control y la determinacin de
las ganancias para garanti-
zar la estabilidad y algn comportamiento que se desee, es
necesario tener una representacin
matemtica de nuestro motor. Es decir, una ecuacin que describa
su comportamiento, esto se
conoce como modelo matemtico y describe la velocidad o posicin
segn el voltaje que se le
aplica a la entrada en este caso.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
30/95
18
2.6 PLC
Las empresas de hoy, que piensan en el futuro, se encuentran
provistas de modernos dis-positivos electrnicos en sus maquinas y
procesos de control. Hoy las fbricas automatizadas
deben proporcionar en sus sistemas, alta confiabilidad, gran
eficiencia y flexibilidad. Una de
las bases principales de tales fbricas es un dispositivo
electrnico llamado Controlador Lgico
Programable.
Empezaron a introducirse a mediados de los aos 60 como aparatos
de control estrictamente
discreto (todo o nada). Cuando pudieron ser programados mediante
el lenguaje de contactosya existente en la lgica cableada, pronto
dominaron el mercado. Sin embargo, los problemas
ms elaborados y los que requeran la manipulacin de magnitudes
analgicas, se dejaron para
los tradicionales sistemas de control distribuido.
El siguiente paso fue configurar los autmatas para gestionar y
tratar datos numricos. Se
aadieron entradas y salidas analgicas para poder leer informacin
de sensores y transmitir
rdenes a los actuadores. Fue relativamente sencillo incorporar
como estndar el algoritmo decontrol PID a los autmatas mediante un
mdulo adicional, bien de tipo analgico, o bien digi-
tal con un procesador propio puesto que en ese momento un solo
procesador no tena suficiente
velocidad de clculo para realizar todas las funciones.
A finales de los aos ochenta, algunos autmatas dejaron de
utilizar un mdulo adicional
para funciones de regulacin e incorporaron el PID como un mero
algoritmo de clculo exis-
tente nicamente en la memoria del aparato. Cuando se
consiguieron tiempos de ejecucin pordebajo del milisegundo, los
usuarios empezaron a concebir que un tiempo as de pequeo era
despreciable comparado con la velocidad de la mayora de los
procesos.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
31/95
19
En lo que se refiere a los algoritmos de control, los autmatas
disponen de lazos PID indi-
viduales: Quizs es en los algoritmos de control avanzados tales
como lgica difusa, redes neu-
ronales, avance/retroceso, ganancia adaptativa o compensacin del
tiempo muerto donde los
reguladores industriales tienen ms margen de maniobra y pueden
adaptarse a cada situacin
en particular.
2.6.1 Descripcin y Funcionamiento de un PLC
Los Controladores Lgicos Programables, (PLC s, Programable Logic
Controller), nacieron
esencialmente como tales, a finales de la dcada de los 60s y
principios de los 70s. Las indus-
trias que propiciaron este desarrollo fueron las automotrices.
Ellas usaban sistemas industriales
basadas en reveladores, en sus sistemas de manufactura. Buscando
reducir los costos de los
sistemas de control por relevadores, la General Motor prepar en
1968 ciertas especificaciones
detallando un Controlador Lgico Programable, estas
especificaciones definan un sistema
de control por relevadores que poda ser asociado no solamente a
la industria automotriz, si no
prcticamente a cualquier industria de manufactura.
Estas especificaciones interesaron a ciertas compaas tales como
GE-Fanuc, reliance Elec-
tric, MODICON, Digital Equipment Co. De tal forma que el
resultado de su trabajo se convirti
en lo que hoy se conoce como Controlador Lgico Programable.
EL PLC es un aparato electrnico operado digitalmente que usa una
memoria programable
para el almacenamiento interno de instrucciones las cuales
implementan funciones especificas
tales como lgicas, secunciales, temporizacin, conteo y
aritmticas, para controlar a travs
de mdulos de entrada /salida, varios tipos de maquinas o
procesos. De una manera general
podemos definir al controlador lgico programable a toda maquina
electrnica, diseada para
controlar en tiempo real y en medio industrial procesos
secuenciales de control. Su progra-
macin y manejo puede ser realizado por personal con
conocimientos electrnicos sin previos
conocimientos sobre informtica.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
32/95
20
Figura 2.6 Diagrama de bloques del autmata programable.
Las entradas y salidas (E/S) del PLC pueden ser:
Digitales: se basan en el principio de todo o nada (On-Off), es
decir, o poseen el mximo
nivel de tensin establecido, o no tienen tensin (0 Volt). Las
seales de las entradas di-gitales del PLC pueden provenir de
pulsadores, finales de carrera, fotoceldas, detectores
de proximidad, switches, etc. Las salidas digitales del PLC
pueden ser aprovechadas por
lmparas, contactores, electrovlvulas, etc.
Analgicas: pueden poseer cualquier valor dentro de un rango
determinado especificado
por el fabricante. Se basan en conversores A/D y D/A aislados de
la CPU. Las seales
de las entradas analgicas del PLC pueden provenir de sensores de
temperatura, etc.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
33/95
21
Por otro lado, con respecto a la memoria del autmata se puede
decir que, en forma general,
sta contiene:
Datos del Proceso:
Seales de planta, entradas y salidas.
Variables internas.
Datos alfanumricos y constantes.
Datos de Control:
Instrucciones de usuario (programa).
Configuracin del autmata (modo de funcionamiento, nmero de
entradas/salidas conec-
tadas, etc).
En la memoria del autmata se almacenan datos binarios (seales de
niveles altos y bajos,
es decir, de unos y ceros) que segn sean sus formatos pueden ser
ledos bit a bit, en gruposde ocho bits (byte) o diecisis bits
(word).
La memoria ideal para el autmata debera ser simultneamente
rpida, pequea, barata y
de bajo consumo de energa, sin embargo, como ninguna de las
memorias del mercado rene
todas estas condiciones, los autmatas combinan distintos tipos
de memorias:
Las memorias de lectura / escritura, RAM, pueden ser ledas y
modificadas cuantas veces
sea necesario a travs de los buses internos, y de forma rpida.
Sus inconvenientes son
su poca capacidad de almacenamiento y, sobre todo, su carcter
voltil, que provoca la
prdida de informacin cada vez que no exista tensin de
alimentacin. Las memorias
RAM se utilizan principalmente como memorias de datos internos,
y nicamente como
memorias de programa en el caso de que pueda asegurarse el
mantenimiento de los datos
con una batera exterior.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
34/95
22
Las memorias de slo lectura, no reprogramables, ROM, no pueden
ser modificadas en
ninguna forma (el contenido de esta memoria no es accesible
desde el exterior). Dentro
del autmata, las memorias ROM se utilizan para almacenar el
programa monitor, que
contiene las siguientes rutinas, incluidas por el
fabricante:
inicializacin tras puesta en tensin o reset,
rutinas de test y de respuesta a error de funcionamiento,
intercambio de informacin con unidades exteriores,
lectura y escritura en las interfaces de E/S.
Las memorias reprogramables, EPROM, son memorias de slo lectura
que pueden pro-
gramarse con un circuito especial, despus de borrar su
contenido. Las clulas de memo-
ria son borradas con luz ultravioleta que penetra en el chip a
travs de una ventana de
cuarzo en su cara superior. Para borrar este tipo de memoria,
sta debe ser extrada del
autmata, por lo que se interrumpe el funcionamiento del mismo.
Normalmente, es-
tas memorias se utilizan para almacenar el programa del usuario,
una vez que ha sido
depurado.
Las memorias EEPROM son memorias de slo lectura alterables por
medios elctricos,
es decir, reprogramables sobre el propio circuito, sin necesidad
de ser extradas del aut-
mata para su borrado. Este tipo de memoria combina la no
volatilidad de las memorias
ROM y EPROM con la reprogramabilidad de la memoria RAM. Las
memorias EEP-
ROM se emplean principalmente para almacenar programas, aunque
en la actualidad
es cada vez ms frecuente el uso de combinaciones RAM+EEPROM,
utilizando estas
ltimas como memorias de seguridad que salvan el contenido de las
RAM en caso de
interrupcin del suministro elctrico. Una vez reanudada la
alimentacin, el contenido
de la EEPROM se vuelca de nuevo a la RAM, por lo que el autmata
puede continuar en
el mismo punto del programa en el que fue interrumpido por la
prdida de tensin.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
35/95
23
Figura 2.7 Componentes principales de un PLC.
La unidad de control se encarga de consultar el estado de las
entradas y de adquirir la
secuencia de instrucciones que generarn seales de salida
especficas en el PLC. Du-
rante la ejecucin del programa, las instrucciones son procesadas
en serie, una tras otra.La unidad de control es la responsable de
actualizar continuamente los temporizadores y
contadores internos que hayan sido programados.
La memoria interna se encarga de almacenar datos intermedios de
clculo y variables
internas que no aparecen directamente sobre las salidas, adems,
hace respaldos de las
seales de entrada y de salida generadas ms recientemente. En
otras palabras, la memo-
ria interna almacena el estado de las variables que maneja el
autmata: entradas, salidas,
contadores, rels internos, etc.
La memoria de programa contiene la secuencia de operaciones
(programa escrito por el
usuario) que deben realizarse sobre las seales de entrada del
autmata para obtener las
seales de salida, as como los parmetros de configuracin del
autmata, tales como
el nombre o identificacin del programa escrito, indicaciones
sobre la configuracin de
E/S o sobre la red de autmatas, si existe, etc. Adicionalmente
puede contener datos
alfanumricos. En caso de que haya que introducir alguna variacin
sobre el sistemade control basta con modificar el contenido de esta
memoria. Este tipo de memoria
normalmente es externa a la CPU.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
36/95
24
Figura 2.8 Estructura tpica de la memoria del autmata.
Las interfaces de entrada y salida establecen la comunicacin del
autmata con la planta.
Para ello se conectan, por una parte, con las seales de proceso
y, por otra, con el bus
interno del autmata. Se conoce como bus interno al conjunto de
lneas y conexiones
que permiten la unin elctrica entre la unidad de control, las
memorias y las interfaces
de E/S. Un bus se compone de un conjunto de hilos o pistas
utilizadas para intercambiar
datos u rdenes.
Figura 2.9 Bus interno del autmata.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
37/95
25
El sistema de E/S de un autmata programable industrial tiene
como funciones:
Adaptar la tensin de trabajo de los dispositivos de campo a la
de los elementos elec-trnicos del autmata.
Proporcionar una adecuada separacin elctrica entre los circuitos
lgicos y los circuitos
de potencia.
La fuente de alimentacin proporciona, a partir de una tensin
exterior, las tensiones
necesarias para el buen funcionamiento de los distintos
circuitos electrnicos del sis-
tema. En ocasiones, el autmata puede disponer de una batera
conectada a esa fuentede alimentacin, lo que asegura el
mantenimiento del programa y algunos datos en las
memorias en caso de interrupcin de la tensin exterior.
Figura 2.10 Ventajas y desventajas del PLC.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
38/95
26
2.7 PID en el PLC S7-200
El SIMATIC S7-200 es el micro-PLC que resuelve tareas de mando y
regulacin en ma-quinaria e instalaciones. Cubre aplicaciones que
van de la sustitucin de rels y contactores
hasta tareas complejas de automatizacin operando aislado,
interconectado en red o en config-
uraciones descentralizadas.
Montaje, programacin y uso particularmente fciles.
De alta escala de integracin, requiere poco espacio,
potente.
Aplicable tanto para los controles ms simples como tambin para
tareas complejas de
automatizacin.
Con destacadas prestaciones de tiempo real y potentes
posibilidades de comunicacin
(PPI, PROFIBUS-DP, AS-Interface).
Campos de aplicacin:
Instalaciones de extraccin.
Maquinaria de labrado de madera.
Mando de puertas.
Ascensores hidrulicos.
Cintas transportadoras.
Industria alimenticia.
Laboratorios.
Aplicaciones con mdem (televigilancia, telemantenimiento).
Instalaciones elctricas.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
39/95
27
Caractersticas mecnicas:
Carcasa robusta y compacta.
Elementos de conexin y mando fcilmente accesibles, protegidos
por tapas frontales.
CPU 224 o superior: bornes desmontables, tambin para mdulos de
ampliacin digita-
les.
Figura 2.11 PLC S7-200.
La funcin PID en el PLC S7-200 se maneja por medio de una tabla
de 32 Bytes, dividido
en 12 memorias usadas para albergar 12 datos de doble palabra
cada uno.
Se comienza en la direccin 100 por ejemplo, la MEM0 va desde 100
a 103, y la que sigue
desde 104 hasta 107, en esta tabla se ingresan datos que la
rutina PID utiliza para crear la fun-
cin de salida de control. La rutina PID trabaja sobre esta tabla
creando una salida para igualar
los datos de las MEM 0 y 4, lo que crea el control PID.
La rutina PID en el PLC es muy flexible, permite tener cualquier
combinacin de contro-
ladores que se desee y slo se necesita determinar las constantes
de comportamiento.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
40/95
Captulo 3
Parte Experimental
3.1 Construccin de la Banda Transportadora
Se construy una maqueta de una banda transportadora que es
movida por una polea puesta
directamente en uno de los lados del eje de un motor de CC.
Sobre esta maqueta se va a aplicar
el control PID desde un Controlador Lgico Programable (PLC).
Para la construccin de la banda transportadora se utiliz el
siguiente material:
2 Rodillos de 4cm de Dimetro.
2 Rodillos de 0.5cm de Dimetro.
2 Varillas de 35cm. de largo.
2 metros de Solera.
4 Rondanas.
4 Baleros.
4 Discos de 7.5cm de Dimetro.
1 metro de largo x 30 cm. de ancho de tela de Licra.
Se utilizaron los 2 metros de solera para construir la
estructura que sirve como base para
la banda transportadora. En los extremos del largo de la
estructura se colocaron los rodillos de
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
41/95
29
5cm. de dimetro que funcionan como ejes para que la banda gire.
Las varillas sirven como
guas de separacin entre las soleras. Los rodillos de 0.5cm de
dimetro se colocaron en medio
de la estructura para tener un control de la tela en el centro
de la banda. Los discos sirven para
que no se atore la tela de polyester a los costados del rodillo.
Se usaron baleros para evitar
el rozamiento entre los ejes de los rodillos y la estructura.
Las rondanas sirven para evitar la
friccin entre los discos de separacin y la estructura.
Figura 3.1 Banda transportadora de nuestro proyecto.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
42/95
30
3.2 Adecuacin del Motor al Proyecto
Para brindar de energa mecnica a la banda transportadora se
utiliz el motor de corrientedirecta SF7370 DSM-0200-2AU de 24V y
modelo RMOTVO643FC.
Figura 3.2 Motor del proyecto.
Se decidi utilizar ste motor porque cuenta con un fotoreductor
cuya funcin es variar
las revoluciones por minuto de entrada, que por lo general son
mayores de 1200, entregando
a la salida un menor nmero de revoluciones por minuto, sin
sacrificar de manera notoria la
potencia.
Este fotoreductor sirve para reducir la velocidad del motor en
una forma segura y eficiente
ya que para la aplicacin que se quiere dar a la banda, es
necesario tener una velocidad baja
para transportar y clasificar a los objetos.
Otros beneficios de utilizar ste motor con fotoreductor sera la
regularidad perfecta que
proporciona tanto en la velocidad como en la potencia
transmitida as como el hecho de que
brinda una mayor eficiencia en la transmisin de la potencia
suministrada por el motor.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
43/95
31
3.2.1 Detector ptico Acoplado
Para el motor tambin utilizamos un detector ptico acoplado,
configurado para crear pul-sos de aproximadamente 5 volts al ser
interrumpido su rayo por un disco con 21 ranuras, ste
da una seal de frecuencia mxima aproximada a 420 Hz, esto es a
1200 rpm, sta seal pos-
teriormente se pasar a un convertidor de frecuencia a
voltaje.
Figura 3.3 Disco.
El detector ptico se conforma de un fototransistor ITR8102 y dos
resistencias de 330 ohms
y 10K respectivamente.
Figura 3.4 Detector ptico acoplado.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
44/95
32
El sensor funciona de la siguiente manera: Si no se interrumpe
el rayo con el disco ranu-
rado, manda 0.13 volts y cuando es interrumpido el rayo, se
produce un pulso de 4.66 volts.
Despus de agregar el sensor ptico, se realiz una tabla del
comportamiento del eje del
motor, la cual dio los siguientes datos:
Tabla 3.1 Comportamiento del eje del motor.
Voltaje Vpicoapico Fracuencia RPS RPM V/RPM
1 120mV 10Hz 0.476 28.571 0.035
2 2.4-4V 102Hz 4.857 291.429 0.00683 2.4-4V 180Hz 8.571 514.286
0.0058
4 2.4-4V 260Hz 12.381 742.857 0.0053
5 2.4-4V 350Hz 16.666 1000 0.005
6 2.4-4V 420Hz 20 1200 0.005
Esto tomando en cuenta que:
RP S= Frecuencia
Pulsos/Rev (3.1)
RP M=RP S 60 (3.2)
Al final se promediaron los valores de los V/RPM para obtener el
factor de proporcionali-
dad FP=0.004905.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
45/95
33
3.3 Convertidor de Frecuencia a Voltaje
Los convertidores de frecuencia a voltaje son circuitos
integrados que convierten un voltajede entrada anlogo en un tren de
pulsos cuya frecuencia de salida es proporcional al nivel de
entrada.
Para conectar el sensor al PLC, es necesario convertir la
frecuencia del motor en voltaje,
sto basndonos en que el PLC no puede aceptar ms de 10V. El
convertidor de frecuencia a
voltaje sirve como una variable elctrica de entrada al PLC, para
lo cual debe ser calculada la
salida mxima de voltaje a 10V a la mxima frecuencia de
aproximadamente 420Hz.
El convertidor de frecuencia a voltaje que usaremos ser el
LM2907 ya que su respuesta es
lineal, lo que significa que es creciente desde 0 voltios y 0
Hertz, hasta el lmite determinado
por los condensadores y resistencias, y la alimentacin del
circuito funciona de modo que si
aumenta la frecuencia, aumenta el voltaje.
Figura 3.5 Diagrama del sensor con el convertidor.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
46/95
34
De acuerdo a esto se hacen los clculos correspondientes para el
convertidor LM2907, que
son los siguientes:
Vmax= 6V
fmax= 420Hz
Vmin= 2V
fmin= 120Hz
C1= V0
(Vcc)(Fmax)(R1)(K) (3.3)
C1= 9V
(12V)(420Hz)(100K)(1)= 17.85nF
C1= 17.85nF
Vrizo =Vcc(C1)
2C2(1
(Vcc)(Fmin)(C1)
I2) (3.4)
Fmax= I2
(C1)(Vcc) (3.5)
I2= (Fmax)(C1)(Vcc) (3.6)
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
47/95
35
I2= (420Hz)(17.85nF)(12V) = 90A
0.01V =(12V)(17.85nF)
2C2(1
(12V)(102Hz)(17.85nF)
90A )
C2=(12V)(17.85nF)
2(0.01V) (1
(12V)(102Hz)(17.85nF)
90A ) = 8F
C2= 8F
Arreglo de Capacitores:
C1= 10nF+ 4.7nF+ 2.2nF = 16.9nF 17.85nF
C2= 4.7F+ 1F+ 2F+ 2.2nF = 8F
Con los valores de los circuitos calculados, se procede a armar
el siguiente diagrama de
conexin del convertidor de frecuencia a voltaje LM2907.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
48/95
36
Figura 3.6 Diagrama de conexin del motor al LM2907.
Figura 3.7 Convertidor de nuestro proyecto.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
49/95
37
3.4 Etapa de Potencia
Dado que las salidas analgicas del PLC slo entregan un voltaje
de 10V mximo y no escapaz de entregar mucha corriente, es necesaria
una etapa de potencia.
Utilizando un transistor de potencia junto con un amplificador
operacional se consigue
generar una seal de mediana corriente que siga el voltaje de
entrada en forma lineal.
G=RfRi
+ 1 (3.7)
La etapa de potencia se calcul tomando en cuenta que el voltaje
mximo aplicado al motor
es 24V y la salida analgica del mdulo "EM235" entrega 10V,
entonces:
Rf= 10K
Ri = 10K
G=10K
10K+ 1 = 2
Por lo que se utiliza un amplificador no inversor con una
ganancia:
G= 2
Y para suministrar la corriente y voltaje adecuado al motor, se
pone entre la salida del
amplificador y el lazo de retroalimentacin, un amplificador de
alta ganancia de corriente dar-
lington formado con los transistores de potencia TIP41 y
TIP35.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
50/95
38
Figura 3.8 Diagrama de la Etapa de Potencia.
Figura 3.9 Etapa de Potencia de nuestro proyecto.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
51/95
39
3.5 Display
Para los displays se utilizaron los decodificadores 74LS48 y el
display ctodo comn. Am-bos estn polarizados con 5V, las terminales
del decodificador D C B y A, ordenadas por mayor
significancia, van conectadas a los mdulos del PLC y las
resistencias que van del A B C y D
son de 330 ohms.
Y funciona de la siguiente manera: El PLC introducir un cdigo
BCD en las entradas del
decodificador 74LS48, ste a su vez las recibir y convertir al
cdigo necesario (seales de la
a-g) para iluminar los segmentos correspondientes del
display.
Figura 3.10 Configuracin del decodificador 74LS48 y del display
ctodo comn.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
52/95
40
Figura 3.11 Diagrama esquemtico de los displays.
Figura 3.12 Display de nuestro proyecto.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
53/95
41
3.6 Modelado Matemtico
Para realizar el modelado matemtico se hace la siguiente conexin
de elementos fsicosde la tesis:
Figura 3.13 Bloques de la conexin.
Con la ayuda del programa en "Lab View" se procede a obtener la
grfica del compor-
tamiento del sistema en lazo cerrado. En el programa se
especifica el voltaje de alimentacin
de la banda transportadora as como el inverso del factor de
proporcionalidad.
Grfica del sistema con 6V de alimentacin y FP=203.874:
Figura 3.14 Grfica del modelado.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
54/95
42
A partir de la grfica obtenida, se hace la identificacin del
sistema. Como se puede ob-
servar esta respuesta corresponde a un sistema de primer orden.
Por lo que se procede a su
identificacin de acuerdo con la ecuacin correspondiente.
WsVs
= d
s+b (3.8)
Donde:
Ws= Velocidad (RPM)
Vs= Vpltaje aplicado (Volts)
Los parmetros de la ecuacin los encontramos a partir de la
grfica del modelo, para esto
obtenemos el valor del tiempotbque es aquel en el cual el motor
alcanza el 63.2 por ciento de
su velocidad final estable (qfinal).
qf= 1240.13rpm
ytb =qf(0.632) (3.9)
ytb = (1240.13)(0.632) = 783.762
Al buscar el valor en la tabla de datos del modelado:
tb= 1.16seg
Con estos datos obtenemos el valor de b y d de la siguiente
manera:
b= 1
tb(3.10)
b= 1
1.16seg = 0.862069
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
55/95
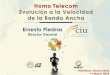
43
d=b(qf)
V
(3.11)
d=0.862069(1240.13)
6 = 178.18
La funcin de transferencia de la planta con el sensor integrado
es:
d
s+b=
178.18
s+ 0.862
W(s) = 178.18
s+ 0.862
Se simul el modelo obtenido aplicndole una entrada escaln de 6V
y se obtuvo la res-
puesta mostrada en la siguiente figura, que corresponde a la
respuesta de velocidad real del
motor, por lo que se considera que el modelo obtenido es el
adecuado.
Figura 3.15 Simulacin del modelo matemtico.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
56/95
44
3.7 Diseo del Controlador PID
Despus de obtener el modelo matemtico y verificar su
estabilidad, se dise un controlPI utilizando el mtodo de cancelacin
de polos, para que el motor tenga una respuesta en ve-
locidad sin sobrepaso con un tiempo de asentamiento de ts=
6seg.
La siguiente ecuacin representa el modelo matemtico o funcin de
transferencia del con-
trolador PI:
Vc(s)
E(s) =
Kp
s (s+
1
Ti ) (3.12)
Donde:
Kp: Ganancia del control proporcional.
Ti: Constante de integracin del control integral.
Vc(s): Salida de la etapa de control.
E(s): Entrada de la etapa de control.
3.7.1 Mtodo de Cancelacin de Polos
El mtodo de cancelacin de polos consiste en poner un cero en la
funcin del control para
que cancele el polo de la planta (motor), en este caso . Por lo
que se procede con los clculos
de la siguiente manera:
(s+ 1
Ti) = (s+b) = (s+ 0.862)
Valor de la constante de tiempo del integradorTi:
Ti =1
b (3.13)
Ti= 1
0.862= 1.16
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
57/95
45
178.18Kp
s+ (178.18)(0.010247)
Kp= 4
(178.18)(0.010247)ts(3.14)
Parats= 6seg.
Kp= 4
(178.18)(0.010247)(6)= 0.365135
Kp= 0.365135
Ki=Kp
Ti(3.15)
Ki =0.365135
1.16 = 0.314747
Ki = 0.314747
Al modelo final se le agreg un factor que llamaremos
(cajas/minuto), el cual tendr la fun-
cin de modificar la respuesta deseada con el fin de transportar
un numero variable de objetos
en un tiempo establecido de un minuto.
El factor (cajas/minuto) se calcul tomando en cuenta el numero
de engranes que afectaban
la respuesta del motor, as como tambin, el dimetro del rodillo
que va conectado al eje del
motor el cual mide 0.05mt.
El clculo de engranes arroj un factor de 15.33, ste valor
representa la relacin de las re-
voluciones por minuto del eje del motor con las revoluciones por
minuto medidas en la banda
transportadora.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
58/95
46
Entonces, con stos datos se procede a calcular el permetro del
rodillo principal de la banda
transportadora:
P = (d)
15.33= 0.010247 (3.16)
Donde:
P: es el permetro del rodillo de la banda.
d: es el dimetro de la banda.
ste valor ser nuestro factor (cajas/minuto) que va a incluirse
en nuestro sistema en lazo
cerrado.
La simulacin final que conjunta el controlador PI, con nuestro
modelo matemtico y el fac-
tor (cajas/minuto) se muestra en la figura 3.13, la cual est
ejemplificada para dar la respuesta
deseada a un valor de 6 cajas/minuto:
Figura 3.16 Simulacin del sistema controlado, con los valores
del control PI.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
59/95
Captulo 4
Aplicacin del Sistema
Como una aplicacin real a nuestro proyecto, se dise un sistema
de clasificacin de obje-
tos con la ayuda de sensores pticos, un motor de cd que
funcionar como selector y la progra-
macin en el PLC. Como otra funcin del display electrnico se
contar con la visualizacin
del numero de objetos clasificados .
4.1 Sensores pticos
En este proyecto se utilizaran dos sensores pticos, uno para
detectar los objetos y otro para
el conteo de stos mismos. Los sensores pticos irn colocados a
cada lado de la base de la
banda, uno muy cercano a la banda y otro a una altura aproximada
de 10cm.
Al pasar el objeto por el primer sensor obstruye el haz de luz y
manda una seal al PLC para
que agregue un dgito al contador, a su vez dependiendo del tamao
del objeto con el segundo
sensor se manda una seal al PLC para clasificarlos en grande o
pequeo y as colocarse en su
respectivo contenedor.
En la figura 4.1 se muestra el circuito para los sensores pticos
de accin negativa que se
emplearn en este proyecto.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
60/95
48
Figura 4.1 Diagrama de los sensores pticos.
4.1.1 Funcionamiento
El funcionamiento de este circuito es mantener activado el
relevador slo cuando el rayo
infrarrojo que llega hasta el fototransistor es interrumpido, es
decir, cuando un cuerpo opaco
se interpone entre el transmisor (LED infrarrojo) y el receptor
(fototransistor), slo en estascondiciones el relevador cierra sus
platinos "normalmente abiertos" lo cul nos permite la lle-
gada de la seal de 24 Volts que necesita el controlador lgico
programable (PLC) para tomar
como "alta" esta seal.
Al existir enlace infrarrojo entre el diodo (Tx) y el
fototransistor (Rx), el transistor BC548
permanece en estado de corte y por consecuencia el relevador
permanece desactivado. Cuando
la comunicacin entre Tx y Rx es interrumpida, es decir, algn
objeto se interpuso entre ellos,la base del transistor es excitada,
permitiendo as la conduccin entre emisor y colector, lo-
grando con esto la conduccin hacia tierra de la bobina del
relevador, en consecuencia, como
ya se mencion, los platinos "normalmente abiertos" del relevador
se cierran permitiendo el
paso de la seal.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
61/95
49
La funcin del diodo 1N4148 es evitar la retroalimentacin (efecto
secundario de la bobina)
que se presenta al momento de la conmutacin. La resistencia de
820tiene la funcin de li-
mitar la corriente que pasa por el Tx, el diodo Zener
proporciona el voltaje necesario para la
excitacin de la base del transistor en el instante en que se
interrumpe el haz.
Figura 4.2 Sensor del proyecto.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
62/95
50
4.2 Selector
Para el selector usaremos un motor de cd modelo PJN30ED18A. ste
se conectar al PLCy proporcionar el movimiento requerido para
clasificar los objetos en los contenedores.
Figura 4.3 Selector de cajas del proyecto.
Para conectar el selector al PLC, se necesit de circuitera para
el motor, la cual se conforma
de dos relevadores. El rel o relevador es un dispositivo
electromecnico, que funciona como
un interruptor controlado por un circuito elctrico en el que,
por medio de un electroimn, se
acciona un juego de uno o varios contactos que permiten abrir o
cerrar otros circuitos elctricos
independientes.
Se utilizarn dos rels normalmente abiertos, los cuales conectan
el circuito cuando el rel
es activado; el circuito se desconecta cuando el rel est
inactivo. El diagrama de conexin de
los rels se muestra a continuacin:
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
63/95
51
Figura 4.4 Diagrama de los relevadores.
4.3 Cajas/minuto
En esta aplicacin se plante controlar la velocidad respecto al
numero de objetos que se
desean transportar, sto con un rango mximo de 52 cajas por
minuto con un valor deseado de
6V.
Para llevar a cabo sta aplicacin se modific el contolador PID
para que diera el valor
deseado que se requiere para transportar las cajas en un
minuto.
Tambin se implement un potencimetro para definir el nmero de
cajas requerido.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
64/95
Captulo 5
Programacin en el PLC S7-200
5.1 Adecuacin de las variables de entrada analgicas a memo-rias
normalizadas en el PLC
En la tabla de la rutina PID los valores deben estar
normalizados de 0 a 1, las entradas y la
salida de control slo tienen valores de 0 a 1. Las seales de
voltaje introducidas al PLC deben
estar limitadas a 10V.
En sta tesis la seal del sensor del motor se digitaliza y se
transforma a un nmero real
de doble palabra y es dividido entre 32000 que es la resolucin
mxima de digitalizacin, de
sta manera queda normalizada la seal del sensor. De igual manera
se ingresa una seal de
voltaje por medio de un potencimetro el cual ser el valor
deseado. Estas seales se mueven
a la tabla de la rutina PID en sus correspondientes localidades
de memoria.
La seal de salida se normaliza de la misma forma, slo que sta
necesita de un redondeo
para ser ms estable y no tener variaciones al ser transformada
en voltaje.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
65/95
53
5.2 Direcciones del PLC
Figura 5.1 Direcciones de Proceso.
Figura 5.2 Direcciones de la etapa de potencia.
Figura 5.3 Direcciones del valor deseado.
Figura 5.4 Direcciones del display.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
66/95
54
5.3 Programa
Figura 5.5 Principal
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
67/95
55
Figura 5.6 Subrutina
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
68/95
56
Figura 5.7 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
69/95
57
Figura 5.8 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
70/95
58
Figura 5.9 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
71/95
59
Figura 5.10 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
72/95
60
Figura 5.11 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
73/95
61
Figura 5.12 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
74/95
62
Figura 5.13 Interrupcin
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
75/95
Captulo 6
Conclusiones
En la primera etapa de la tesis que fue la investigacin terica,
podemos concluir que se
tienen muchas fuentes de informacin respecto a ste tema, lo nico
difcil de encontrar fue la
manera de construir la maqueta de una banda transportadora, ya
que prcticamente slo existen
imgenes de bandas transportadoras industriales.
La segunda etapa fue la construccin de la banda transportadora,
en donde inicialmente
se nos dificult encontrar la idea para plantear el diseo de sta,
se necesit aprender muchos
conceptos mecnicos as como tambin aprender a utilizar diferentes
mquinas mecnicas paradistintos fines de construccin. Se construy un
modelo inicial, pero ya que no funcionaba
correctamente para ste proyecto de tesis, se necesit de corregir
muchas imperfecciones en
cuanto a la estabilidad y rigidez de la maqueta. Esto nos sirvi
para tener ms creatividad e
ingenio en la bsqueda de elementos para la correccin de la
maqueta. Con todo esto se con-
cluy que se necesita tener suficiente conocimiento sobre mecnica
en la teora y en la prctica.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
76/95
64
En la tercera etapa que fue la elaboracin de circuitos,
aprendimos ms sobre dispositivos
electrnicos, sobre el cuidado que se debe de tener al soldar,
sobre la proteccin que se debe de
dar a cada dispositivo, etc. En sta parte de la tesis se nos
complic un poco el uso de nuestra
etapa de potencia, ya que stas suelen sobrecalentarse y probamos
varios disipadores de calor
para colocarle el adecuado, al final tambin le agregamos un
ventilador para disminuir el calor
en la etapa de potencia. Tambin en sta etapa se realiz un
display electrnico para visualizar
las rpm del motor en tiempo real, el cual funcion a la perfeccin
y se comprob que si es
posible agregar formas de visualizar varias cuestiones en un
sistema. Y finalmente podemos
concluir en que la construccin de nuestros circuitos electrnicos
se nos facilit relativamente
ya que contamos con la experiencia adquirida en la realizacin de
varios proyectos de elec-
trnica a lo largo de nuestra carrera.
En la cuarta etapa de la tesis se llev a cabo el modelado
matemtico de la banda trans-
portadora, en el cual se procedi a obtener la grfica del modelo
del sistema teniendo ya todo
conectado a la banda transportadora, con sto comprobamos que en
realidad si se obtiene una
grfica del sistema ms parecida al que es su comportamiento real
y se demuestra que las gr-
ficas de las simulaciones as como el comportamiento real del
motor con los controladores
diseados son correctos ya que llegaron a los valores de
velocidad y sobrepaso deseados. Con
lo anterior se concluye que los clculos realizados para la
funcin de transferencia del mo-
tor son correctos, de no ser as, al aplicarse los controladores
a la planta no se obtendra el
comportamiento deseado. Tambin se comprueba la utilidad de la
modelacin matemtica y
simulacin computacional para la sintonizacin de aquellos
sistemas en que la experimentacin
directa no es viable.
En la quinta etapa se realiz toda la programacin, esta parte de
la tesis se nos facilit ya
que habamos llevado el curso de programacin en el PLC S5 y en el
PLC S7 y tenamos una
perspectiva amplia de las funciones de ste controlador lgico
programable, se probaron varias
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
77/95
65
formas de obtener las caractersticas deseadas del sistema y
finalmente se concluy que la pro-
gramacin en el PLC es muy sencilla y muy adaptable a cualquier
necesidad.
Al final ideamos una aplicacin efectiva para nuestra tesis, en
la que decidimos clasificar
objetos en cuanto a tamao, y nuevamente se necesit de
creatividad para hacer el selector,
colocar los sensores, hacer los objetos que se iban a
transportar etc. Tambin nos dimos cuenta
que era ms sencillo usar un motor de corriente directa para el
uso del selector, que un motor de
pasos el cual haba sido elegido inicialmente, ya que se necesita
de un movimiento continuo en
un tiempo establecido en el programa del PLC y con el motor de
pasos encontramos dificultad
para efectuar el movimiento de directa y reversa. Esta aplicacin
que dimos a nuestra banda
transportadora fue muy interesante ya que se nos ocurrieron
varias ideas en el proceso como
por ejemplo visualizar el numero de cajas grandes y pequeas que
han sido clasificadas en
nuestro display electrnico y tambin la idea de poner un
potencimetro para que al operador
se le hiciera mas sencillo designar el numero de cajas que
quisiera transportar. El nico incon-
veniente que se nos present fue que a la velocidad mxima de 6V,
los sensores en ocasiones
no detectaban algunos objetos, as que para velocidades
superiores a 6V, colocamos los objetos
mas distanciados unos del otro. En sta etapa concluimos en que
es muy gratificante ver un
proceso terminado y comparado con un proceso industrial
normal.
A lo largo de toda la elaboracin de la tesis fuimos documentando
todo lo que hacamos,
y esto en verdad result de ser una gran ayuda ya que no tuvimos
que agregar otra etapa de
elaboracin del documento de tesis, ya que sta se iba realizando
da con da.
Como conclusin general podemos decir que el hecho de controlar
algo automticamente
es muy til, el tema de la tesis en general fue interesante y muy
relacionado a la industria, el
conocimiento que adquirimos es de mucha ayuda ya que pensamos
desarrollarnos profesional-
mente en la industria.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
78/95
66
6.1 Recomendaciones
En relacin a nuestro tema de tesis creemos importante la
adquisicin de los conocimientosnecesarios del funcionamiento de las
diversas mquinas de corriente continua, ya que determi-
nan la capacidad de un ingeniero de elegir el motor ideal para
la satisfaccin de los requeri-
mientos de cualquier proceso para los cuales sea necesario la
participacin de estos equipos.
Tambin creemos importante que en la carrera se impartan ms
materias relacionadas a la
mecnica.
En cuanto al uso de los modos de control, consideramos que deben
estar acorde con las ca-ractersticas del proceso, lo cual significa
que debemos entender bien la operacin del proceso
antes de automatizarlo y de proceder a las rutinas de los
algoritmos de control.
Y finalmente, para los interesados en realizar una tesis de
bandas transportadoras, podemos
recomendarles la elaboracin de una banda mas larga esto con el
fin de que permita mejores
demostraciones en la clasificacin de objetos o una mejor
visualizacin del control de veloci-
dad. Otra recomendacin sera usar sensores pticos de respuesta
mas rpida de los usados ensta tesis. Tambin no est de ms colocar
unos sensores de posicin para el clasificador, sto
para que se le facilite al programa saber en qu posicin se
encuentra el clasificador y a partir
de sta reaccionar correctamente.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
79/95
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
80/95
67
Apndice A: Hojas de datos
Figura A.1 ITR8102
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
81/95
68
Figura A.2 LM2907
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
82/95
69
Figura A.3 LM2907
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
83/95
70
Figura A.4 LM2907
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
84/95
71
Figura A.5 LM324
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
85/95
72
Figura A.6 LM324
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
86/95
73
Figura A.7 LM324
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
87/95
74
Figura A.8 TIP41
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
88/95
75
Figura A.9 TIP35
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
89/95
76
Figura A.10 74LS48
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
90/95
77
Figura A.11 74LS48
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
91/95
78
Figura A.12 BC546
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
92/95
79
Apndice B: Manual del Operador
Figura B.1 Tablero de Control.
Antes de comenzar con el proceso debe verificarse que el PLC
este en stop, las fuentes
encendidas, el sw de inicio activado, el interruptor que indica
la velocidad y el nmero de cajas
en el modo de RPM y el operador debe colocar la perrilla de
cajas por minuto en el valor de
cajas que desea transportar.
Para comenzar el proceso se corre el programa, el operador debe
cerciorarse en el display
que la velocidad se estabilice para colocar las cajas sobre la
banda transportadora.
Despus de que la velocidad se estabilizo se colocara el
interruptor en el modo de No DE
CAJAS, para conocer el nmero de cajas grandes y chicas que estn
siendo transportadas.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
93/95
80
Si durante el proceso se desea aumentar o disminuir el nmero de
cajas por minuto, el
operador podr mover la perrilla al valor deseado pero tendr que
esperar que la velocidad se
estabilice para colocar cajas nuevamente.
Al activar el paro (si se ha terminado el proceso o exista
alguna falla) el operador debe
cerciorarse de que el sw de inicio este desactivado.
Si se desea comenzar el proceso nuevamente el operador debe
repetir los pasos antes men-
cionados.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
94/95
81
Referencias
[1] FRANKLIN, GENE. POWELL, DAVID. EMAMI-NAEINE, ABBAS
(1991).Control deSistemas Dinmicos con Retroalimentacin.
Addison-Wesley Iberoamericana.
[2] FROHR.Introduccin al Control Electrnico. Editorial Marcombo,
Madrid, 1986[3] HERNNDEZ S., L. y HERNNDEZ R., J., Sintona de
Reguladores PID. Departa-
mento de Automtica y Sistemas Computacionales, Universidad de
Las Villas, Cuba(1999).
[4] KUO, B.C.-Sistemas de Control Automtico. Prentice Hall
Hispanoamericana, Mxico,1996.
[5] LEE Y., PARK S., LEE M. y BROSILIW C., PID Controller Tunig
for Desired Closed-Loop Response for SI/SO, AIChE J., 44 (1),
106-115 (2004).
[6] LEONHARD, W,Control of electrical drives, Springer - Verlag,
Berlin, 1985.[7] M. H. Rashid, Electrnica de Potencia: circuitos,
dispositivos y aplicaciones, 2nd ed.
Prentice Hall Inc., 1993.
[8] MALONEY, T. (1997)Electrnica Industrial Moderna. Tercera
edicin. Prentice Hall.
[9] MILLMAN, JACOB. (1986)Microelectrnica Circuitos y Sistemas
Analgicos y Digita-les, Espaa tercera Edicin. Editorial Hispano
Europea.
[10] NORMAN. S. NISE,Sistemas de Control para Ingeniera,
Prentice Hall, Tercera edicin.
[11] OGATA, K.Modern Control Engineering, 3rd Edition. Prentice
Hall, 1997.
[12] OGATA, KATSUHIKO (1998). Ingeniera de Control Moderna.
Tercera Edicin.Prentice-Hall hispanoamericana, S.A.
[13] S. B. DEWAN, G. R. SLEMON, A. STRAUGHEN,Power Semiconductor
Drives, 1984.
[14] SANTANA, J. L. Anlisis y diseo de sistemas de control
automtico. Trabajo deDiploma, Universidad de Camagey, Cuba,
2001.
[15] SHIGLEY, MISCHKE,Diseo en Ingeniera Mecnica. McGraw-Hill,
5a ed.
-
7/22/2019 Control PID de La Velocidad de Una Banda (2)
95/95
82
[16] SMITH, CARLOS A. CORRIPIO (1996). Control Automtico de
Procesos. Teora yPrctica. Limusa Noriega Editores.
[17] STEPHEN J. CHAPMAN.-Mquinas Elctricas. Mc Graw Hill,
Mexico, 1992.
[18] WHAN SUNG S., LEE TAI-YOG y PARK S. Optimal PID Controller
Tuning Methodfor Single-Input /Single.-Output, AICHE Journal ,Vol
48, (6), 1358 -1361 (2004).
Pginas Web:
[19] http:
//csd.newcastle.edu.au/SpanishPages/claseslidesdownload/C07.pdf
[20] http:
//es.geocities.com/jeeesusmeeerino/procesos/tipos/tipos.html
[21] http:
//es.geocities.com/juanpizarromartin/proyecto10.htm#ii
[22] http: //es.wikipedia.org/wiki/Modelomatem%C3%A1tico
[23] http: //es.wikipedia.org/wiki/P
roporcionalintegralderivativo
[24] http: //html.rincondelvago.com/pcl.html
[25] http: //ib.cnea.gov.ar/
control2/Links/TutorialMatlabesp/PID.html
[26] http:
//ieeexplore.ieee.org/iel5/9907/34414/01642429.pdf
[27] http: //isa.umh.es/asignaturas/ai/practicas/p09.pdf
[28] http: //perso.wanadoo.es/luisju/soft/files/motores.pdf
[29] http: //plantasquimicas.iespana.es/Control/c8c.htm