Embed Size (px)
Citation preview

CONTROL Y MODELADO DE UN MOTOR DE RELUCTANCIA
CONMUTADA ATRAVES DE LA TECNICA DE ELEMENTO FINITO

HISTORIA
Su invención se atribuye a David son en 1837, sus orígenes se remontan al inicio de la década de 1820 cuando Ampere demostró que un solenoide es un imán controlado eléctricamente. Un solenoide alimentado produce fuerzas sobre elementos de hierro cercano, proporcional a la corriente de excitación.
No es hasta finales de la década de los años 70 del siglo pasado cuando a partir de los trabajos de investigación sobre vehículos eléctricos alimentados desde baterías, realizados en las Universidades de Leeds y Nottingham es que puede decirse que comienza la era moderna del motor de reluctancia conmutada .
Este renacimiento del motor de reluctancia conmutada fue gracias a la utilización de los interruptores de estado sólido (en aquel tiempo el tiristor, posteriormente, PowerMosfets e IGBTs) que solucionaron el problema de la conmutación de las fases

VENTAJAS
Algunas de las ventajas principales que presenta el motor de reluctancia conmutada se basan en su construcción simple y robusta, y en los bajos costes de fabricación.
Eficiencia: las MRCs ofrecen alta densidad de potencia, e igual o mejor eficiencia que los motores AC convencionales, y permite un mayor par a bajas velocidades que otro tipo de motores.
Par máximo: la MRC tiene capacidad para producir mayor par máximo que los motores de inducción, particularmente a bajas velocidades.
Además, la MRC podrá seguir funcionando con un rendimiento menor, si una de las fases fallan.
Momento de inercia: el motor de reluctancia conmutado posee un momento de inercia muy pequeño

DESVENTAJAS
Posición del rotor: la operación de la MRC exige el conocimiento de la posición del rotor para la sincronización de ésta con la energización de las distintas fases
Rizado de par y ruido acústico: el rizado del par es mayor que para otro tipo de motores. Esto da lugar a niveles de vibración y ruido acústico que pueden no ser admisibles.
No linealidad: la estructura de polos doblemente saliente que la MRC precisa para producir par reluctante producen características magnéticas altamente no lineales, lo que complica el análisis y el accionamiento de este tipo de motores.

APLICACIONES
accionamientos industriales de propósito general.
accionamientos específicos en comprensores, ventiladores, bombas, centrifugadoras.
accionamientos domésticos de lavadoras, aspiradoras, procesadoras de comida.
aplicaciones de tracción y vehículos eléctricos.
motores y generadores para el sector aeronáutico.

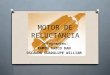
ESTRUCTURA
El motor de reluctancia conmutada se alimenta de corriente continua y no requiere de escobillas ni imanes permanentes. Su constitución habitual presenta una estructura magnética de polos salientes tanto en el estator como en el rotor.
Se utiliza un convertidor electrónico para energizar las fases y un sensor para obtener información de la posición rotórica.

ESTRUCTURA
En los polos del estator se ubican las bobinas concentradas que conectadas entre sí en serie a pares diametralmente opuestos forman las fases del motor. Las configuraciones más habituales son 6/4 (6 polos estatóricos y 4 polos rotóricos) y 12/8 para los accionamientos trifásicos, 8/6 y 16/12 para los tetrafásicos y 10/8 para los pentafásicos

ESTRUCTURA El número de polos del rotor tiene que ser tal que impida, para
cualquier posición, la alineación completa con todos los polos estatóricos, ya que siempre ha de existir algún polo rotórico que pueda alcanzar el alineamiento. Por lo tanto han de cumplirse las condiciones siguientes:
Ns = 2 × k ×m
Nr = 2 × k × (m +1)
Siendo:
Ns = Número de polos del estator.Nr = Número de polos del rotor.2k = Número de polos por fasem = Número de fases de la máquina.

ESTRUCTURA
El ángulo de paso o de conmutación viene dado por la siguiente ecuación:
Al número de conmutaciones necesarias
para hacer una revolución completa se le conoce como resolución, s, y es igual a:

FUNCIONAMIENTO
Cuando se energiza una fase del estator, se produce un campo magnético que atrae un par de los elementos salientes del rotor desde una posición de no alineamiento hasta la posición de alineamiento con la fase; una excitación secuencial de las fases hace que el rotor gire y, secuencialmente, se vaya alineando a las fases energizadas del estator. El sensor de posición suministra la información necesaria para la sincronización de la secuencia de conmutación de las fases.
En todo momento, el rotor "buscará" alinearse de forma tal de
minimizar la reluctancia rotor-estator, circunstancia que se da cuando el espacio entre polos del estator queda lo más posiblemente ocupado por material del rotor, es decir, orientando los polos energizados del estator.
La reluctancia R de un circuito magnético se puede calcular como:

CONMUTACIÓN DE UN CICLO ELÉCTRICO

EVOLUCIÓN DE LA INDUCTANCIA DE FASE

EVOLUCIÓN DE LA INDUCTANCIA DE FASE

EVOLUCIÓN DE LA INDUCTANCIA DE FASE

EVOLUCIÓN DE LA INDUCTANCIA DE FASE
Donde KL es la constancia de proporcionalidad de la inductancia

MODELO
La ecuación electromagnética de cada fase del estator esta dada por la ecuación
Donde λ= i L( ), despreciando la caída de tensión en la 𝝦resistencia del estator se puede simplificar la ecuación en :
Donde al multiplicarse por la corriente se obtiene la potencia

MODELO
La ecuación anterior muestra como la potencia eléctrica suministrada al motor se divide en dos términos uno para describir la variación de energía almacenada en el campo magnético y el segundo para potencia mecánica el cual define el par :

MODELO
Finalmente sustituyendo las inductancias dependiendo de la posición y derivando podemos obtener el par de las distintas posiciones que toma el rotor

MODELADO MEDIANTE MÉTODO ELEMENTO FINITO
El MEF permite realizar un modelo matemático de cálculo del sistema real, más fácil y económico de modificar que un prototipo.
La idea general del método de los elementos finitos es la división de un continuo en un conjunto de pequeños elementos interconectados por una serie de puntos llamados nodos.
Las ecuaciones que rigen el comportamiento del continuo regirán también el del elemento. De esta forma se consigue pasar de un sistema continuo (infinitos grados de libertad), que es regido por una ecuación diferencial o un sistema de ecuaciones diferenciales, a un sistema con un número de grados de libertad finito cuyo comportamiento se modela por un sistema de ecuaciones, lineales o no.

MODELADO MEDIANTE MÉTODO ELEMENTO FINITO
ANSYS Maxwell es el sofware más importante en el campo de simulación electromagnética para los ingenieros encargados de diseño y análisis de 3-D y 2-D electromagnética y dispositivos electromecánicos, tales como motores, sensores, transformadores y bobinas.