Embed Size (px)
Citation preview

Descripción
Controlador de
motor con interfaz
para
– IO-Link
– I-Port– Modbus TCP/IP
Perfil de equipo
FHPP
8043637
1507NH
[8043630]
CMMO-ST-C5-1-LKP
Controlador de motor
CMMO-ST-C5-1-LKP
2 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Traducción del manual original
GDCP-CMMO-ST-LK-C-HP-ES
IO-Link®, Modbus®, TIA-Portal® son marcas registradas de los propietarios correspondientes de las
marcas en determinados países.
Identificación de peligros e indicaciones para evitarlos:
AdvertenciaPeligros que pueden ocasionar lesiones graves e incluso la muerte.
AtenciónPeligros que pueden ocasionar lesiones leves o daños materiales graves.
Otros símbolos:
NotaDaños materiales o pérdida de funcionalidad.
Recomendaciones, sugerencias y referencias a otras fuentes de documentación.
Accesorios indispensables o convenientes.
Información sobre el uso de los productos respetuoso con el medio ambiente.
Identificadores de texto:
� Actividades que se pueden realizar en cualquier orden.
1. Actividades que se tienen que realizar en el orden indicado.
– Enumeraciones generales.
� Resultado de una actuación/Referencias a informaciones adicionales.
Identificaciones del software:
<xxx> Botones del software
[xxx]�[xxx] Referencias a estructuras de menú y de submenú del software
FCT […]�[xxx] Menú plugin FCT de los componentes en la ventana “Puesto de trabajo”
Menú FCT [xxx] Menú principal FCT
CMMO-ST-C5-1-LKP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 3
Contenido – CMMO-ST-C5-1-LKP
Documentación sobre el controlador de motor 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Estado de versión 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Asistencia técnica 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 FHPP con el controlador de motor CMMO-ST 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Resumen de FHPP 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Interfaces 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 IO-Link 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 IO-Link/I-Port e interfaz I/O digital [X1] 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Parametrización del dispositivo IO-Link 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Parametrización con el plugin de FCT CMMO-ST 12. . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Parametrización con el servidor de red integrado 12. . . . . . . . . . . . . . . . . . . . . . . .
2.3 Configuración del master IO-Link 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Ejemplo de CMMO-ST con S7 1200 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 I-Port 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 IO-Link/I-Port e interfaz I/O digital [X1] 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Parametrización del dispositivo I-Port 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Parametrización con el plugin de FCT CMMO-ST 17. . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Parametrización con el servidor de red integrado 17. . . . . . . . . . . . . . . . . . . . . . . .
3.3 Configuración del master I-Port 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Modbus TCP/IP 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Interfaz Modbus TCP [X18] 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Distribución de conectores y especificaciones de cables 20. . . . . . . . . . . . . . . . . .
4.2 Parametrización del participante TCP de Modbus 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Parametrización con el plugin de FCT CMMO-ST 21. . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Parametrización con el servidor de red integrado 22. . . . . . . . . . . . . . . . . . . . . . . .
4.3 Configuración del master Modbus 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Dirección IP 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Asignación de direcciones y operaciones Modbus 22. . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Objetos de datos con el comando Modbus “Read Device Identification” 28. . . . .
4.3.4 Funciones de supervisión 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMMO-ST-C5-1-LKP
4 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
5 Control secuencial y datos I/O 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Valor de referencia (modos de funcionamiento FHPP) 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.1.1 Conmutación del modo de funcionamiento FHPP 29. . . . . . . . . . . . . . . . . . . . . . . .5.1.2 Selección de frase 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.1.3 Tarea directa 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Máquina de estado FHPP 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1 Establecer disponibilidad para funcionar 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.2 Posicionar 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.3 Ejemplos de bytes de estado y de control 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Estructura de los datos I/O 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.1 Concepto 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.2 Datos I/O (bytes 1 … 8) en los distintos modos de funcionamiento FHPP 41. . . . .
5.4 Asignación de bytes de control y de bytes de estado (resumen) 42. . . . . . . . . . . . . . . . . . . . .5.4.1 Descripción de los bytes de control 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.4.2 Descripción de bytes de estado 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Controlar a través de FHPP 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Sistema de referencia de medida para accionamientos eléctricos 52. . . . . . . . . . . . . . . . . . .6.2 Recorrido de referencia 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Recorrido de referencia de accionamientos eléctricos 52. . . . . . . . . . . . . . . . . . . .6.2.2 Métodos del recorrido de referencia 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Actuación secuencial 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.4 Programación tipo teach-in a través del bus de campo 55. . . . . . . . . . . . . . . . . . . . . . . . . . . .6.5 Ejecución de frase 57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Diagramas de ciclo de selección de frase 59. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.5.2 Composición de la frase 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.5.3 Encadenamiento de frases (PNU 402) 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6 Ejecutar tarea directa 64. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.6.1 Secuencia de tarea directa 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7 Supervisión del comportamiento del accionamiento 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.7.1 Mensaje “Motion Complete” 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.7.2 Mensaje “Error de seguimiento” 71. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.7.3 Mensaje “Supervisión de reposo” 72. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.7.4 Comparadores 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Diagnosis 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Mensajes de diagnosis 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.1.1 Clasificación y reacciones ante errores 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.1.2 Indicación de un evento de diagnosis 77. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.1.3 Memoria de diagnosis 78. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Detección y eliminación de fallos 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.2.1 Validar error 79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.2.2 Parametrización de los mensajes de diagnosis y eliminación de fallos 80. . . . . . .
CMMO-ST-C5-1-LKP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 5
A Apéndice técnico 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Incrementos 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Incrementos de encoder [EINC] 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2 Incrementos de interfaz [SINC] 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Factores de conversión 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Parámetros de referencia 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Estructura general de parámetros FHPP 83. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Protección de acceso y control de nivel superior 84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Cuadro general de parámetros según FHPP 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.1 Datos del equipo 85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.2 Diagnosis 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.3 Datos de proceso 87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.4 Lista de frases 88. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.5 Datos del proyecto 90. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.6 Grupo de factores 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3.7 Parámetros del eje: Accionamientos eléctricos 1 93. . . . . . . . . . . . . . . . . . . . . . . .
B.4 Descripción de los parámetros según FHPP 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.1 Representación de las entradas de parámetros 96. . . . . . . . . . . . . . . . . . . . . . . . .
B.4.2 Datos del equipo – Números de versión 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.3 Datos del equipo – Identificación 98. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.4 Datos del equipo – Parámetros MMI 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.5 Parámetros de diagnosis 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.6 Datos de proceso – Datos generales de proceso 110. . . . . . . . . . . . . . . . . . . . . . . .
B.4.7 Datos de proceso - Datos de FHPP 112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.8 Lista de frases – Datos de frase 113. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.9 Lista de frases – Mensajes de frases 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.10 Datos del proyecto – Datos generales del proyecto 125. . . . . . . . . . . . . . . . . . . . . .
B.4.11 Datos del proyecto – Modo de fuerza/momento de giro 126. . . . . . . . . . . . . . . . . . .
B.4.12 Datos del proyecto – Programación tipo teach-in 127. . . . . . . . . . . . . . . . . . . . . . . .
B.4.13 Datos del proyecto – Modo directo FHPP 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.14 Datos del proyecto – Operación por actuación secuencial 130. . . . . . . . . . . . . . . . .
B.4.15 Datos del proyecto – Modo directo posición 131. . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.16 Datos del proyecto – Modo de fuerza 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.17 Datos de proyecto – Modo directo revoluciones 133. . . . . . . . . . . . . . . . . . . . . . . . .
B.4.18 Datos del proyecto – Modo directo general 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.19 Grupo de factores 137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.20 Parámetros de eje: Accionamientos eléctricos 1 – Parámetros de mecánica 138. . .
B.4.21 Parámetros del eje: Accionamientos eléctricos 1 – Parámetros del recorrido
de referencia 140. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.22 Parámetros del eje: Accionamientos eléctricos 1 – Parámetros del controlador 142
CMMO-ST-C5-1-LKP
6 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.23 Parámetros del eje: Accionamientos eléctricos 1 – Placa de características
electrónica 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.24 Parámetros del eje: Accionamientos eléctricos 1 – Supervisión de reposo 146. . . .
B.4.25 Parámetros del eje: Accionamientos eléctricos 1 – Supervisión de error de
seguimiento 147. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4.26 Parámetros del eje: Accionamientos eléctricos 1 – Datos del motor 147. . . . . . . . .
B.4.27 Parámetros del eje: Accionamientos eléctricos 1 – Datos de temperatura 147. . . .
B.4.28 Parámetros del eje: Accionamientos eléctricos 1 – Datos generales
del accionamiento 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C Festo Parameter Channel (FPC) 150. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.1 FPC para datos cíclicos de I/O 150. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2 Resumen de EFPC 150. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.1 Estructura de EFPC 150. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2.2 FPCC y FPCS – Modo de transmisión, Request-ID y Response-ID 151. . . . . . . . . . . .
C.3 Transmisión de parámetros (PNUs, objetos internos) 152. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.3.1 Estructura de EFPC en la transmisión de parámetros 152. . . . . . . . . . . . . . . . . . . . .
C.3.2 Estructura de la transmisión de parámetros 152. . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.3.3 Ejemplo de transmisión de parámetros 152. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.3.4 Códigos de error 153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.4 Transmisión del archivo de parámetros 154. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.4.1 Estructura de EFPC en la transmisión del archivo de parámetros 154. . . . . . . . . . . .
C.4.2 ID de paquete 154. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.4.3 Archivo de parámetros y paquete de datos útiles 155. . . . . . . . . . . . . . . . . . . . . . . .
C.4.4 Comprobación y activación del archivo de parámetros 156. . . . . . . . . . . . . . . . . . . .
C.4.5 Secuencia de la transmisión del archivo de parámetros 156. . . . . . . . . . . . . . . . . . .
C.4.6 Ejemplos de transmisión del archivo de parámetros 157. . . . . . . . . . . . . . . . . . . . . .
C.4.7 Códigos de error 162. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D Mensajes de diagnosis 164. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
E Términos y abreviaciones 178. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Índice 180. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMMO-ST-C5-1-LKP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 7
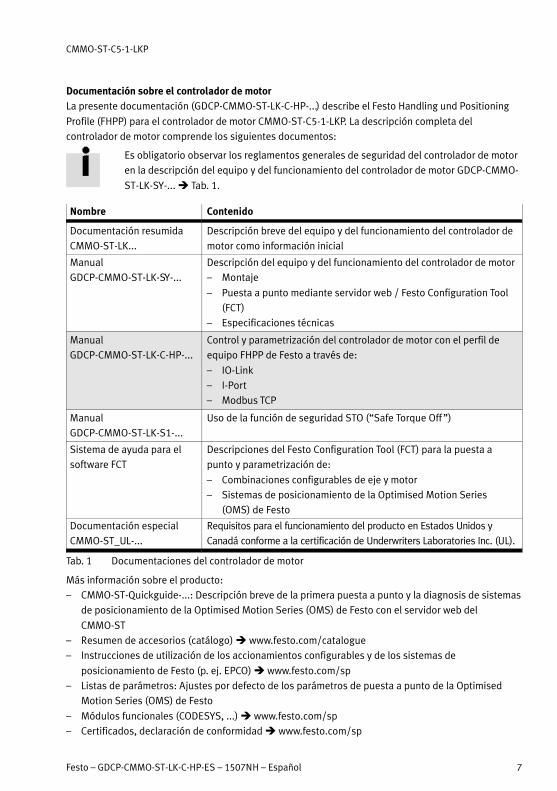
Documentación sobre el controlador de motorLa presente documentación (GDCP-CMMO-ST-LK-C-HP-...) describe el Festo Handling und Positioning
Profile (FHPP) para el controlador de motor CMMO-ST-C5-1-LKP. La descripción completa del
controlador de motor comprende los siguientes documentos:
Es obligatorio observar los reglamentos generales de seguridad del controlador de motor
en la descripción del equipo y del funcionamiento del controlador de motor GDCP-CMMO-
ST-LK-SY-... � Tab. 1.
Nombre Contenido
Documentación resumida
CMMO-ST-LK...
Descripción breve del equipo y del funcionamiento del controlador de
motor como información inicial
Manual
GDCP-CMMO-ST-LK-SY-...
Descripción del equipo y del funcionamiento del controlador de motor
– Montaje
– Puesta a punto mediante servidor web / Festo Configuration Tool
(FCT)
– Especificaciones técnicas
Manual
GDCP-CMMO-ST-LK-C-HP-...
Control y parametrización del controlador de motor con el perfil de
equipo FHPP de Festo a través de:
– IO-Link
– I-Port
– Modbus TCP
Manual
GDCP-CMMO-ST-LK-S1-...
Uso de la función de seguridad STO (“Safe Torque Off ”)
Sistema de ayuda para el
software FCT
Descripciones del Festo Configuration Tool (FCT) para la puesta a
punto y parametrización de:
– Combinaciones configurables de eje y motor
– Sistemas de posicionamiento de la Optimised Motion Series
(OMS) de Festo
Documentación especial
CMMO-ST_UL-...
Requisitos para el funcionamiento del producto en Estados Unidos y
Canadá conforme a la certificación de Underwriters Laboratories Inc. (UL).
Tab. 1 Documentaciones del controlador de motor
Más información sobre el producto:
– CMMO-ST-Quickguide-...: Descripción breve de la primera puesta a punto y la diagnosis de sistemas
de posicionamiento de la Optimised Motion Series (OMS) de Festo con el servidor web del
CMMO-ST
– Resumen de accesorios (catálogo) � www.festo.com/catalogue
– Instrucciones de utilización de los accionamientos configurables y de los sistemas de
posicionamiento de Festo (p. ej. EPCO) � www.festo.com/sp
– Listas de parámetros: Ajustes por defecto de los parámetros de puesta a punto de la Optimised
Motion Series (OMS) de Festo
– Módulos funcionales (CODESYS, ...) � www.festo.com/sp
– Certificados, declaración de conformidad � www.festo.com/sp
CMMO-ST-C5-1-LKP
8 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Destinatarios
Esta documentación está destinada exclusivamente a especialistas formados en tecnología de
automatización y control, con experiencia en instalación, puesta a punto, programación y diagnosis de
sistemas de posicionamiento.
Estado de versiónLa presente documentación se refiere a las siguientes versiones del controlador de motor:
– Firmware: A partir de V 1.4.x
– Plugin de FCT: A partir de CMMO-ST V 1.4.x
Las siguientes especificaciones se visualizan en el software cuando hay una conexión
online activa:
– Versión de firmware y MAC ID � Registro “Info” del servidor de red integrado
– Versión de hardware, versión de firmware � FCT (página “Controller”)
Si actualmente no hay conexión online activa, se visualizará la información de la
última conexión.
Otras especificaciones de la versión, p. ej. revisión: � Identificación del producto del
controlador de motor
NotaAntes de utilizar una versión de firmware más reciente:
� Comprobar si hay disponible una versión más reciente del plugin de FCT o de la
documentación de usuario � www.festo.com/sp.
Asistencia técnica
Ante cualquier problema técnico, diríjase a su servicio local de postventa de Festo.
1 FHPP con el controlador de motor CMMO-ST
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 9
1 FHPP con el controlador de motor CMMO-ST
1.1 Resumen de FHPP
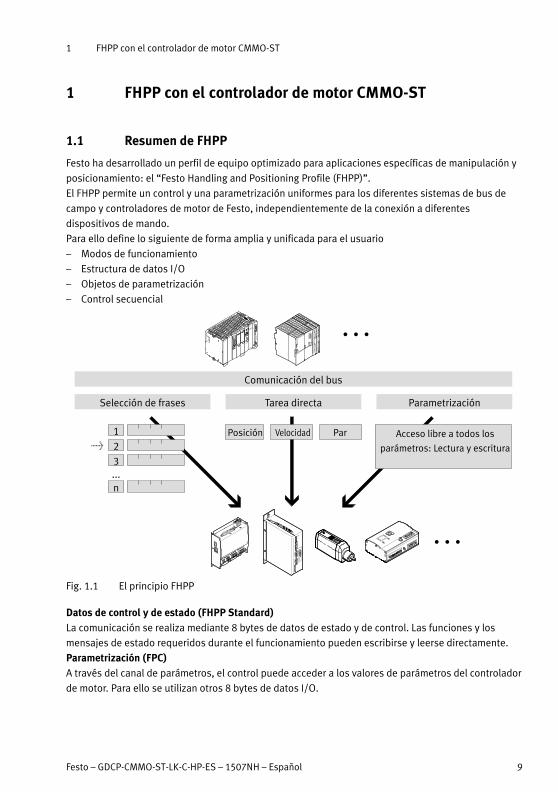
Festo ha desarrollado un perfil de equipo optimizado para aplicaciones específicas de manipulación y
posicionamiento: el “Festo Handling and Positioning Profile (FHPP)”.
El FHPP permite un control y una parametrización uniformes para los diferentes sistemas de bus de
campo y controladores de motor de Festo, independientemente de la conexión a diferentes
dispositivos de mando.
Para ello define lo siguiente de forma amplia y unificada para el usuario
– Modos de funcionamiento
– Estructura de datos I/O
– Objetos de parametrización
– Control secuencial
Comunicación del bus
Selección de frases
Acceso libre a todos los
parámetros: Lectura y escritura
. . .
Tarea directa Parametrización
Posición Velocidad Par
. . .
1
2
3...n
>
Fig. 1.1 El principio FHPP
Datos de control y de estado (FHPP Standard)La comunicación se realiza mediante 8 bytes de datos de estado y de control. Las funciones y los
mensajes de estado requeridos durante el funcionamiento pueden escribirse y leerse directamente.
Parametrización (FPC)A través del canal de parámetros, el control puede acceder a los valores de parámetros del controlador
de motor. Para ello se utilizan otros 8 bytes de datos I/O.
1 FHPP con el controlador de motor CMMO-ST
10 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
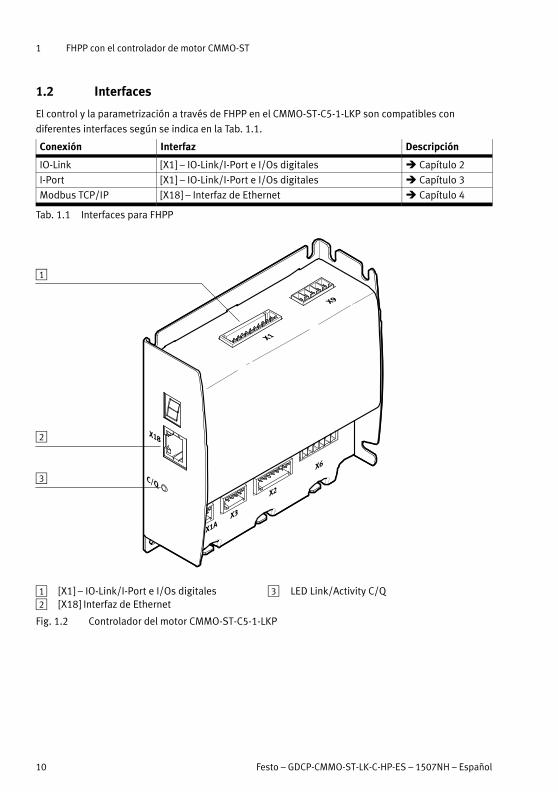
1.2 Interfaces
El control y la parametrización a través de FHPP en el CMMO-ST-C5-1-LKP son compatibles con
diferentes interfaces según se indica en la Tab. 1.1.
Conexión Interfaz Descripción
IO-Link [X1] – IO-Link/I-Port e I/Os digitales � Capítulo 2
I-Port [X1] – IO-Link/I-Port e I/Os digitales � Capítulo 3
Modbus TCP/IP [X18] – Interfaz de Ethernet � Capítulo 4
Tab. 1.1 Interfaces para FHPP
2
1
3
1 [X1] – IO-Link/I-Port e I/Os digitales2 [X18] Interfaz de Ethernet
3 LED Link/Activity C/Q
Fig. 1.2 Controlador del motor CMMO-ST-C5-1-LKP
2 IO-Link
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 11
2 IO-LinkEl sistema de comunicación IO-Link sirve para el intercambio de datos en serie de módulos funcionales
descentralizados (dispositivos) en el nivel de campo.
IO-Link es una tecnología IO estandarizada (CEI 61131-9) que sirve para intercambiar datos en serie de
modo bidireccional con los sensores y los actuadores a través de una conexión trifilar. El controlador de
motor es un dispositivo IO-Link conforme a la IO-Link Interface Specification Version 1.1 [IOL].
El LED C/Q del controlador del motor indica el estado de la conexión IO-Link.
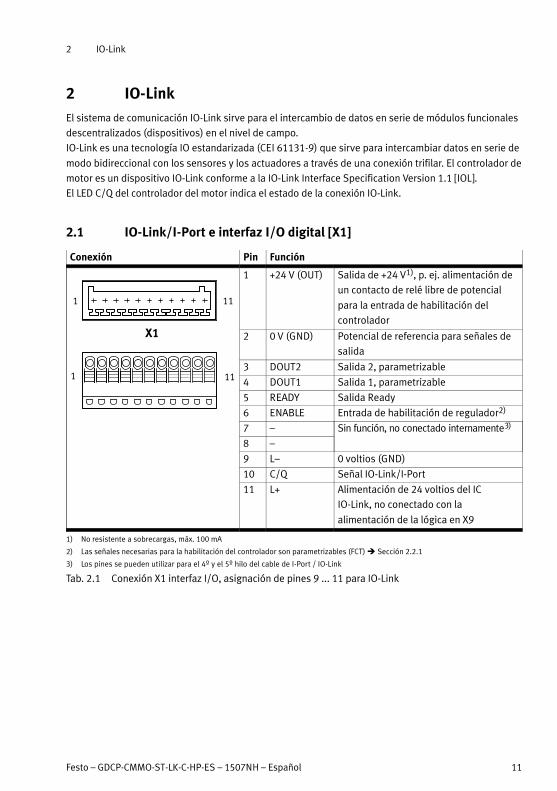
2.1 IO-Link/I-Port e interfaz I/O digital [X1]
Conexión Pin Función
X1
1 11
1 11
1 +24 V (OUT) Salida de +24 V1), p. ej. alimentación de
un contacto de relé libre de potencial
para la entrada de habilitación del
controlador
2 0 V (GND) Potencial de referencia para señales de
salida
3 DOUT2 Salida 2, parametrizable
4 DOUT1 Salida 1, parametrizable
5 READY Salida Ready
6 ENABLE Entrada de habilitación de regulador2)
7 – Sin función, no conectado internamente3)
8 –
9 L– 0 voltios (GND)
10 C/Q Señal IO-Link/I-Port
11 L+ Alimentación de 24 voltios del IC
IO-Link, no conectado con la
alimentación de la lógica en X9
1) No resistente a sobrecargas, máx. 100 mA
2) Las señales necesarias para la habilitación del controlador son parametrizables (FCT) � Sección 2.2.1
3) Los pines se pueden utilizar para el 4º y el 5º hilo del cable de I-Port / IO-Link
Tab. 2.1 Conexión X1 interfaz I/O, asignación de pines 9 ... 11 para IO-Link
2 IO-Link
12 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
2.2 Parametrización del dispositivo IO-Link
Antes de realizar la conexión del controlador de motor con el master IO-Link, parametrizar la interfaz y
el perfil de equipo:
– con el plugin de FCT CMMO-ST � Sección 2.2.1
– con el servidor de red integrado � Sección 2.2.2
Conexión del controlador de motor con el PC � Descripción del equipo y del
funcionamiento del controlador de motor, GDCP-CMMO-ST-LK-SY-....
2.2.1 Parametrización con el plugin de FCT CMMO-ST1. Crear configuración del accionamiento � Ayuda del plugin de FCT CMMO-ST
2. En la página Datos de aplicación (Application Data), definir la interfaz de control (Control Interface):
– “IO-Link”
3. Opcionalmente, definir lo siguiente en la página Controlador (Controller):
– Habilitación con (Enabled by), determinación de las señales necesarias para la habilitación del
controlador:
– “Bus de campo” (Fieldbus) – Ajuste de fábrica
– “Entrada digital 'Habilitación' y bus de campo” (Digital Input 'Enable' and Fieldbus)
4. En la página Bus de campo (Fieldbus) definir el perfil de equipo (Device Profile):
– “FHPP Standard”
– “FHPP Standard + FPC”
5. Establecer conexión online.
6. Activar el control del equipo (Device Control).
7. Descargar y guardar (Store) los parámetros.
Después de modificar y guardar los siguientes parámetros con el plugin FCT es necesario
reiniciar para activar los ajustes:
– Interfaz de control (Modbus, IO-Link, I-Port)
– Perfil de equipo (FHPP Standard, FHPP Standard + FPC)
Después de la parametrización y de un reinicio del controlador de motor se puede configurar el master
IO-Link � Sección 2.3.
2.2.2 Parametrización con el servidor de red integrado
1. Acceder a la conexión online con el navegador “http://192.168.178.1/” (ajuste de fábrica)
2. Activar el control del equipo (Device Control) para parametrizar y guardar.
3. En el registro Control Interface, definir la interfaz de control y guardar (Save):
– “IO-Link”
4. En el registro FHPP Profile, definir el perfil de equipo y guardar (Save):
– “FHPP Channel”
– “FHPP + FPC Channel”
Después de la parametrización se puede configurar el master IO-Link � Sección 2.3.
2 IO-Link
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 13
2.3 Configuración del master IO-Link
Configurar el controlador de motor en el master IO-Link para establecer la conexión IO-Link.
Pasos para configurar el master IO-Link � Documentación del programa de configuración
utilizado (CODESYS, TIA Portal, STEP 7, ...).
Los archivos IODD contienen toda la información necesaria para la configuración:
Archivos IODD Perfil de equipo
Festo-CMMO-ST-C5-1-LKP_FHPP-xxxxxxxx-IODD1.1.xml FHPP Standard (8 bytes de I/O)
Festo-CMMO-ST-C5-1-LKP_FHPP_and_FPC-xxxxxxxx-IODD1.1.xml FHPP Standard + FPC
(16 bytes de I/O)
(xxxxxxxx = fecha)
Tab. 2.2 Archivos IODD
El controlador de motor es compatible con la especificación IO-Link V1.1 con las siguientes características:
– Datos cíclicos de IO-Link de 8 o 16 bytes I/O.
– Los errores y advertencias específicos del equipo se comunican al master IO-Link a través del
“Event management”.
– El modo SIO no es compatible.
– Velocidad de transmisión 230,4 kbaudios.
– Sin compatibilidad con el servidor de parámetros del master IO-Link (2048 bytes para parámetros
del controlador de motor no son suficientes).
Con módulos funcionales o bloques funcionales adecuados se puede llevar a cabo la carga o
descarga de todos los parámetros en el control a través de EFPC � Apéndice C.4
Archivos IODD actuales, módulos funcionales o bloques funcionales
� www.festo.com/sp
2 IO-Link
14 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
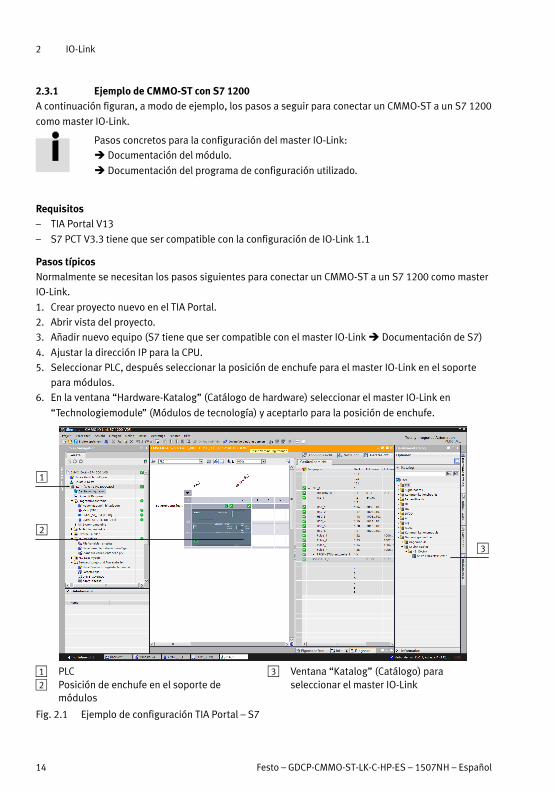
2.3.1 Ejemplo de CMMO-ST con S7 1200A continuación figuran, a modo de ejemplo, los pasos a seguir para conectar un CMMO-ST a un S7 1200
como master IO-Link.
Pasos concretos para la configuración del master IO-Link:
� Documentación del módulo.
� Documentación del programa de configuración utilizado.
Requisitos– TIA Portal V13
– S7 PCT V3.3 tiene que ser compatible con la configuración de IO-Link 1.1
Pasos típicosNormalmente se necesitan los pasos siguientes para conectar un CMMO-ST a un S7 1200 como master
IO-Link.
1. Crear proyecto nuevo en el TIA Portal.
2. Abrir vista del proyecto.
3. Añadir nuevo equipo (S7 tiene que ser compatible con el master IO-Link � Documentación de S7)
4. Ajustar la dirección IP para la CPU.
5. Seleccionar PLC, después seleccionar la posición de enchufe para el master IO-Link en el soporte
para módulos.
6. En la ventana “Hardware-Katalog” (Catálogo de hardware) seleccionar el master IO-Link en
“Technologiemodule” (Módulos de tecnología) y aceptarlo para la posición de enchufe.
1
2
3
1 PLC2 Posición de enchufe en el soporte de
módulos
3 Ventana “Katalog” (Catálogo) paraseleccionar el master IO-Link
Fig. 2.1 Ejemplo de configuración TIA Portal – S7
2 IO-Link
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 15
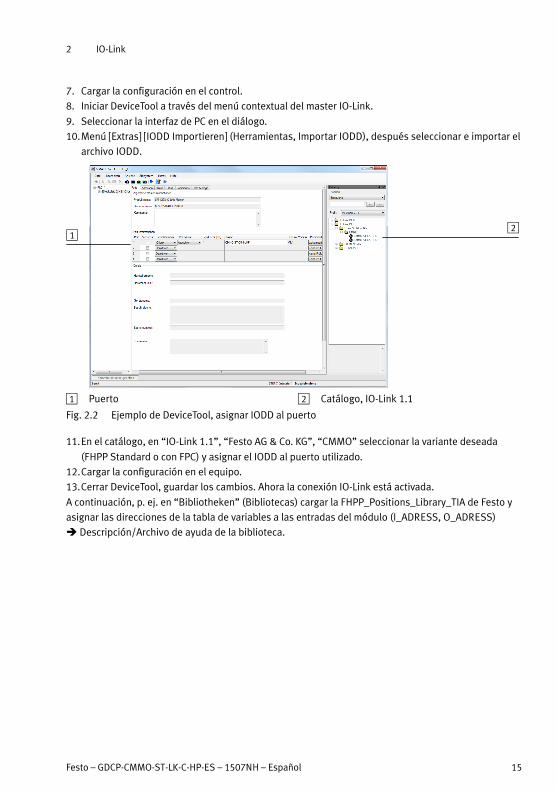
7. Cargar la configuración en el control.
8. Iniciar DeviceTool a través del menú contextual del master IO-Link.
9. Seleccionar la interfaz de PC en el diálogo.
10.Menú [Extras] [IODD Importieren] (Herramientas, Importar IODD), después seleccionar e importar el
archivo IODD.
12
1 Puerto 2 Catálogo, IO-Link 1.1
Fig. 2.2 Ejemplo de DeviceTool, asignar IODD al puerto
11.En el catálogo, en “IO-Link 1.1”, “Festo AG & Co. KG”, “CMMO” seleccionar la variante deseada
(FHPP Standard o con FPC) y asignar el IODD al puerto utilizado.
12.Cargar la configuración en el equipo.
13.Cerrar DeviceTool, guardar los cambios. Ahora la conexión IO-Link está activada.
A continuación, p. ej. en “Bibliotheken” (Bibliotecas) cargar la FHPP_Positions_Library_TIA de Festo y
asignar las direcciones de la tabla de variables a las entradas del módulo (I_ADRESS, O_ADRESS)
� Descripción/Archivo de ayuda de la biblioteca.
3 I-Port
16 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
3 I-PortLa interfaz I-Port específica de Festo sirve para el intercambio de datos en serie para la conexión de
módulos funcionales descentralizados (Devices) de Festo en el nivel de campo.
El LED C/Q del controlador del motor indica el estado de la conexión I-Port.
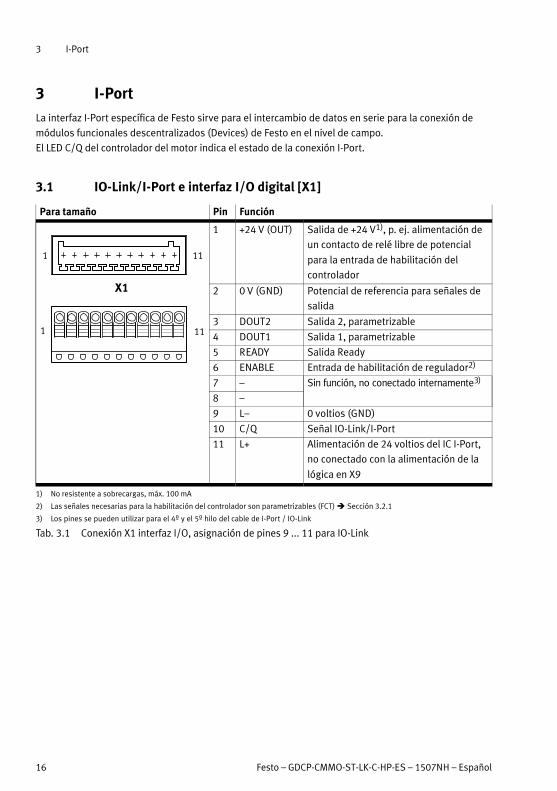
3.1 IO-Link/I-Port e interfaz I/O digital [X1]
Para tamaño Pin Función
X1
1 11
1 11
1 +24 V (OUT) Salida de +24 V1), p. ej. alimentación de
un contacto de relé libre de potencial
para la entrada de habilitación del
controlador
2 0 V (GND) Potencial de referencia para señales de
salida
3 DOUT2 Salida 2, parametrizable
4 DOUT1 Salida 1, parametrizable
5 READY Salida Ready
6 ENABLE Entrada de habilitación de regulador2)
7 – Sin función, no conectado internamente3)
8 –
9 L– 0 voltios (GND)
10 C/Q Señal IO-Link/I-Port
11 L+ Alimentación de 24 voltios del IC I-Port,
no conectado con la alimentación de la
lógica en X9
1) No resistente a sobrecargas, máx. 100 mA
2) Las señales necesarias para la habilitación del controlador son parametrizables (FCT) � Sección 3.2.1
3) Los pines se pueden utilizar para el 4º y el 5º hilo del cable de I-Port / IO-Link
Tab. 3.1 Conexión X1 interfaz I/O, asignación de pines 9 ... 11 para IO-Link
3 I-Port
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 17
3.2 Parametrización del dispositivo I-Port
Antes de realizar la conexión del controlador de motor con el master I-Port, parametrizar la interfaz y el
perfil de equipo:
– con el plugin de FCT CMMO-ST � Sección 3.2.1
– con el servidor de red integrado � Sección 3.2.2
Conexión del controlador de motor con el PC � Descripción del equipo y del
funcionamiento del controlador de motor, GDCP-CMMO-ST-LK-SY-....
3.2.1 Parametrización con el plugin de FCT CMMO-ST1. Crear configuración del accionamiento � Ayuda del plugin de FCT CMMO-ST.
2. En la página Datos de aplicación (Application Data), definir la interfaz de control (Control Interface):
– “I-Port”
3. Opcionalmente, definir lo siguiente en la página Controlador (Controller):
– Habilitación con (Enabled by), determinación de las señales necesarias para la habilitación del
controlador:
– “Bus de campo” (Fieldbus) – Ajuste de fábrica
– “Entrada digital 'Habilitación' y bus de campo” (Digital Input 'Enable' and Fieldbus)
4. En la página Bus de campo (Fieldbus) definir el perfil de equipo (Device Profile):
– “FHPP Standard”
– “FHPP Standard + FPC”
5. Establecer conexión online.
6. Activar el control del equipo (Device Control).
7. Descargar y guardar (Store) los parámetros.
Después de modificar y guardar los siguientes parámetros con el plugin FCT es necesario
reiniciar para activar los ajustes:
– Interfaz de control (Modbus, IO-Link, I-Port)
– Perfil de equipo (FHPP Standard, FHPP Standard + FPC)
Después de la parametrización y de un reinicio del controlador de motor se puede configurar el master
I-Port � Sección 3.3.
3.2.2 Parametrización con el servidor de red integrado
1. Acceder a la conexión online con el navegador “http://192.168.178.1/” (ajuste de fábrica)
2. Activar el control del equipo (Device Control) para parametrizar y guardar.
3. En el registro Control Interface, definir la interfaz de control y guardar (Save):
– “I-Port”
4. En el registro FHPP Profile, definir el perfil de equipo y guardar (Save):
– “FHPP Channel”
– “FHPP + FPC Channel”
Después de la parametrización se puede configurar el master I-Port � Sección 3.3.
3 I-Port
18 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
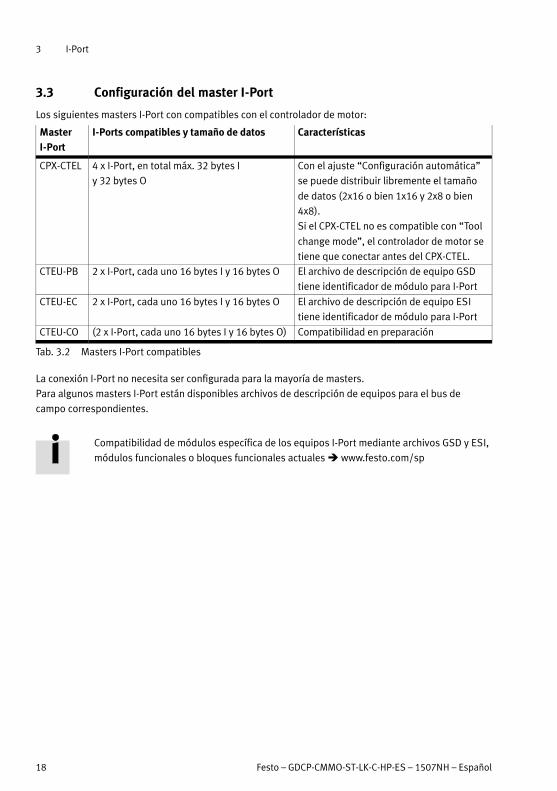
3.3 Configuración del master I-Port
Los siguientes masters I-Port con compatibles con el controlador de motor:
MasterI-Port
I-Ports compatibles y tamaño de datos Características
CPX-CTEL 4 x I-Port, en total máx. 32 bytes I
y 32 bytes O
Con el ajuste “Configuración automática”
se puede distribuir libremente el tamaño
de datos (2x16 o bien 1x16 y 2x8 o bien
4x8).
Si el CPX-CTEL no es compatible con “Tool
change mode”, el controlador de motor se
tiene que conectar antes del CPX-CTEL.
CTEU-PB 2 x I-Port, cada uno 16 bytes I y 16 bytes O El archivo de descripción de equipo GSD
tiene identificador de módulo para I-Port
CTEU-EC 2 x I-Port, cada uno 16 bytes I y 16 bytes O El archivo de descripción de equipo ESI
tiene identificador de módulo para I-Port
CTEU-CO (2 x I-Port, cada uno 16 bytes I y 16 bytes O) Compatibilidad en preparación
Tab. 3.2 Masters I-Port compatibles
La conexión I-Port no necesita ser configurada para la mayoría de masters.
Para algunos masters I-Port están disponibles archivos de descripción de equipos para el bus de
campo correspondientes.
Compatibilidad de módulos específica de los equipos I-Port mediante archivos GSD y ESI,
módulos funcionales o bloques funcionales actuales � www.festo.com/sp
4 Modbus TCP/IP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 19
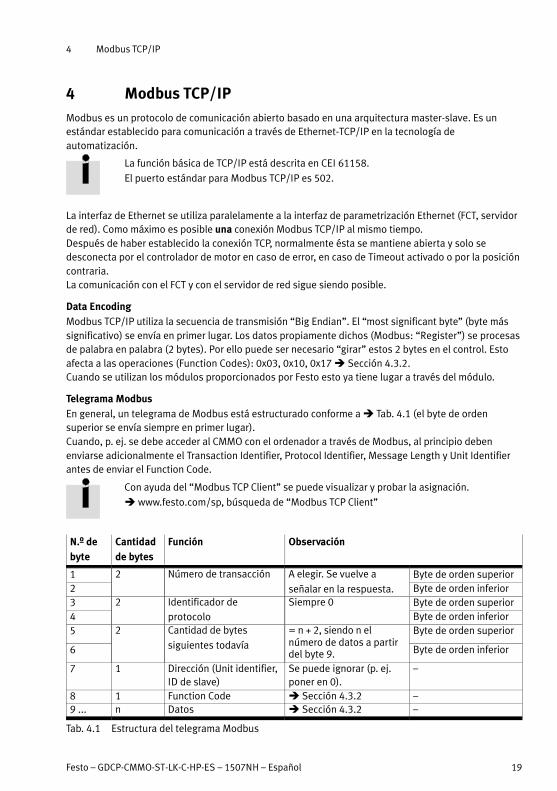
4 Modbus TCP/IPModbus es un protocolo de comunicación abierto basado en una arquitectura master-slave. Es unestándar establecido para comunicación a través de Ethernet-TCP/IP en la tecnología deautomatización.
La función básica de TCP/IP está descrita en CEI 61158.
El puerto estándar para Modbus TCP/IP es 502.
La interfaz de Ethernet se utiliza paralelamente a la interfaz de parametrización Ethernet (FCT, servidorde red). Como máximo es posible una conexión Modbus TCP/IP al mismo tiempo.Después de haber establecido la conexión TCP, normalmente ésta se mantiene abierta y solo sedesconecta por el controlador de motor en caso de error, en caso de Timeout activado o por la posicióncontraria.La comunicación con el FCT y con el servidor de red sigue siendo posible.
Data EncodingModbus TCP/IP utiliza la secuencia de transmisión “Big Endian”. El “most significant byte” (byte mássignificativo) se envía en primer lugar. Los datos propiamente dichos (Modbus: “Register”) se procesasde palabra en palabra (2 bytes). Por ello puede ser necesario “girar” estos 2 bytes en el control. Estoafecta a las operaciones (Function Codes): 0x03, 0x10, 0x17 � Sección 4.3.2.Cuando se utilizan los módulos proporcionados por Festo esto ya tiene lugar a través del módulo.
Telegrama ModbusEn general, un telegrama de Modbus está estructurado conforme a � Tab. 4.1 (el byte de ordensuperior se envía siempre en primer lugar).Cuando, p. ej. se debe acceder al CMMO con el ordenador a través de Modbus, al principio debenenviarse adicionalmente el Transaction Identifier, Protocol Identifier, Message Length y Unit Identifierantes de enviar el Function Code.
Con ayuda del “Modbus TCP Client” se puede visualizar y probar la asignación.
� www.festo.com/sp, búsqueda de “Modbus TCP Client”
N.º debyte
Cantidadde bytes
Función Observación
1 2 Número de transacción A elegir. Se vuelve a
señalar en la respuesta.Byte de orden superior
2 Byte de orden inferior3 2 Identificador de
protocoloSiempre 0 Byte de orden superior
4 Byte de orden inferior5 2 Cantidad de bytes
siguientes todavía
= n + 2, siendo n elnúmero de datos a partirdel byte 9.
Byte de orden superior
6 Byte de orden inferior
7 1 Dirección (Unit identifier,ID de slave)
Se puede ignorar (p. ej.poner en 0).
–
8 1 Function Code � Sección 4.3.2 –9 ... n Datos � Sección 4.3.2 –
Tab. 4.1 Estructura del telegrama Modbus
4 Modbus TCP/IP
20 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
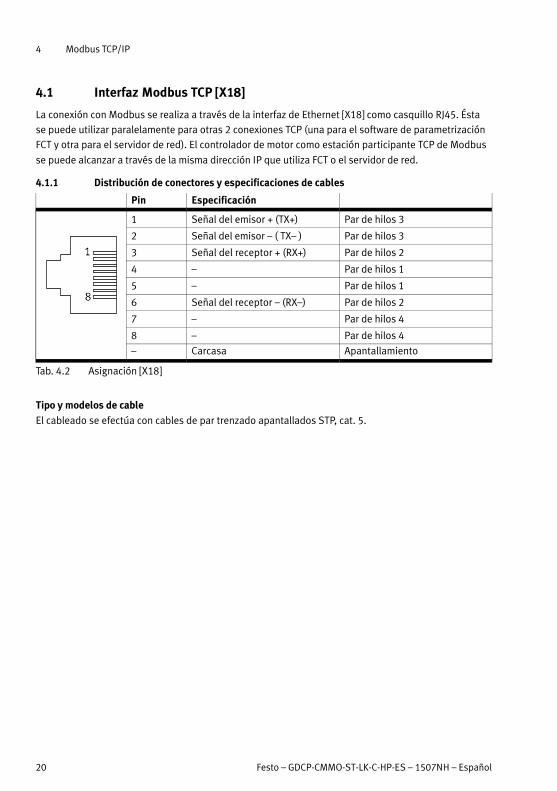
4.1 Interfaz Modbus TCP [X18]
La conexión con Modbus se realiza a través de la interfaz de Ethernet [X18] como casquillo RJ45. Ésta
se puede utilizar paralelamente para otras 2 conexiones TCP (una para el software de parametrización
FCT y otra para el servidor de red). El controlador de motor como estación participante TCP de Modbus
se puede alcanzar a través de la misma dirección IP que utiliza FCT o el servidor de red.
4.1.1 Distribución de conectores y especificaciones de cables
Pin Especificación
1 Señal del emisor + (TX+) Par de hilos 3
2 Señal del emisor – ( TX– ) Par de hilos 3
3 Señal del receptor + (RX+) Par de hilos 2
4 – Par de hilos 1
5 – Par de hilos 1
6 Señal del receptor – (RX–) Par de hilos 2
7 – Par de hilos 4
8 – Par de hilos 4
– Carcasa Apantallamiento
Tab. 4.2 Asignación [X18]
Tipo y modelos de cable
El cableado se efectúa con cables de par trenzado apantallados STP, cat. 5.
4 Modbus TCP/IP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 21
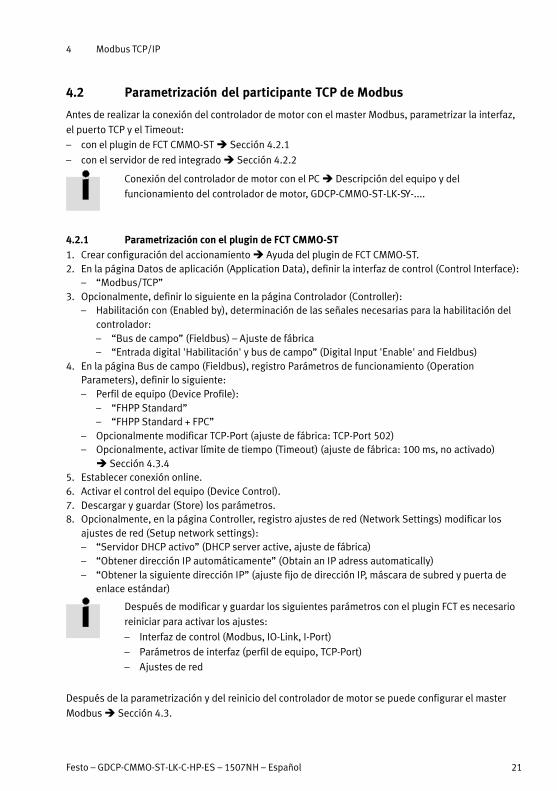
4.2 Parametrización del participante TCP de Modbus
Antes de realizar la conexión del controlador de motor con el master Modbus, parametrizar la interfaz,
el puerto TCP y el Timeout:
– con el plugin de FCT CMMO-ST � Sección 4.2.1
– con el servidor de red integrado � Sección 4.2.2
Conexión del controlador de motor con el PC � Descripción del equipo y del
funcionamiento del controlador de motor, GDCP-CMMO-ST-LK-SY-....
4.2.1 Parametrización con el plugin de FCT CMMO-ST1. Crear configuración del accionamiento � Ayuda del plugin de FCT CMMO-ST.2. En la página Datos de aplicación (Application Data), definir la interfaz de control (Control Interface):
– “Modbus/TCP”3. Opcionalmente, definir lo siguiente en la página Controlador (Controller):
– Habilitación con (Enabled by), determinación de las señales necesarias para la habilitación delcontrolador:– “Bus de campo” (Fieldbus) – Ajuste de fábrica– “Entrada digital 'Habilitación' y bus de campo” (Digital Input 'Enable' and Fieldbus)
4. En la página Bus de campo (Fieldbus), registro Parámetros de funcionamiento (OperationParameters), definir lo siguiente:– Perfil de equipo (Device Profile):
– “FHPP Standard”– “FHPP Standard + FPC”
– Opcionalmente modificar TCP-Port (ajuste de fábrica: TCP-Port 502)– Opcionalmente, activar límite de tiempo (Timeout) (ajuste de fábrica: 100 ms, no activado)
� Sección 4.3.45. Establecer conexión online.6. Activar el control del equipo (Device Control).7. Descargar y guardar (Store) los parámetros.8. Opcionalmente, en la página Controller, registro ajustes de red (Network Settings) modificar los
ajustes de red (Setup network settings):– “Servidor DHCP activo” (DHCP server active, ajuste de fábrica)– “Obtener dirección IP automáticamente” (Obtain an IP adress automatically)– “Obtener la siguiente dirección IP” (ajuste fijo de dirección IP, máscara de subred y puerta de
enlace estándar)
Después de modificar y guardar los siguientes parámetros con el plugin FCT es necesario
reiniciar para activar los ajustes:
– Interfaz de control (Modbus, IO-Link, I-Port)
– Parámetros de interfaz (perfil de equipo, TCP-Port)
– Ajustes de red
Después de la parametrización y del reinicio del controlador de motor se puede configurar el master
Modbus � Sección 4.3.
4 Modbus TCP/IP
22 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
4.2.2 Parametrización con el servidor de red integrado1. Acceder a la conexión online con el navegador “http://192.168.178.1/”
2. Activar el control del equipo (Device Control) para parametrizar y guardar.
3. En el registro Control Interface, ajustar la interfaz de control y guardar (Save):
– “MODBUS”
4. En el registro FHPP Profile, ajustar el perfil de equipo y guardar (Save):
– “FHPP Channel”
– “FHPP + FPC Channel”
5. En el registro Network, definir los ajustes de red y guardar (Save):
– “DHCP server active”
– “Obtain an IP adress automatically”
– “Use the following IP adress” (ajuste fijo de dirección IP, máscara de subred y puerta de enlace
estándar)
Después de la parametrización se puede configurar el master Modbus � Sección 4.3.
4.3 Configuración del master Modbus
4.3.1 Dirección IPLa dirección IP del controlador de motor como estación participante TCP de Modbus es idéntica a la
dirección IP ajustada en el FCT o en el servidor de red.
4.3.2 Asignación de direcciones y operaciones ModbusSe admiten las siguientes operaciones: (transacciones de Modbus):
– Read Holding Registers (0x03)
– Read Exception Status (0x07)
– Write Multiple Registers (0x10)
– Read/Write Multiple Registers (0x17)
– Read Device Identification (0x2B)
La dirección de inicio es siempre “0”, la secuencia de bytes es siempre “Big Endian”.
La Tab. 4.3 muestra los comandos de Modbus compatibles.
4 Modbus TCP/IP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 23
OrdenModbus
Significado
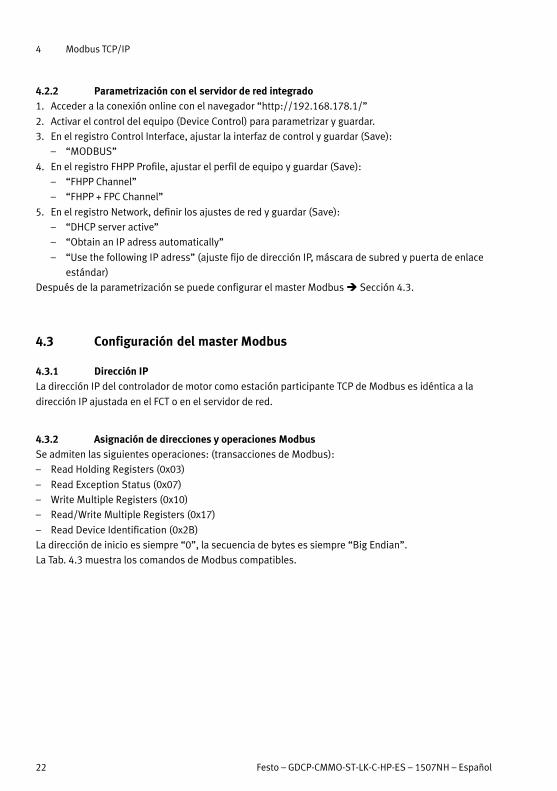
Read/write
multiple
registers
Lectura y escritura de los datos de proceso
Read/write multiple registers request (0x17)
Campo Bytes Valores N.º debyte
Function code 1 0x17 8
Start address read 2 0x0000 9, 10
Quantity of registers
read
2 0x0004: FHPP Standard
0x0008: FHPP Standard + FPC
11, 12
Start address write 2 0x0000 13, 14
Quantity of registers
write
2 0x0004: FHPP Standard
0x0008: FHPP Standard + FPC
15, 16
Byte count write 1 0x08: FHPP Standard
0x10: FHPP Standard + FPC
17
Registers values write 8, 16 Proceso FHPP Standard telegrama
de salida O
FHPP Standard + proceso FPC
telegrama de salida O
18 ...
Read/write multiple registers response (0x17)
Campo Bytes Valores N.º debyte
Function code 1 0x17 8
Byte count 1 0x08: FHPP Standard
0x10: FHPP Standard + FPC
9
Register value 8, 16 Proceso FHPP Standard telegrama
de entrada I
FHPP Standard + proceso FPC
telegrama de entrada I
10 ...
Read/write multiple registers exception (0x97)
Campo Bytes Valores N.º debyte
Error Code 1 0x97 8
Exception code 1 0x01: illegal function
0x02: illegal data address
0x03: illegal data value
0x04: server device failure
9
4 Modbus TCP/IP
24 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
OrdenModbus
Significado
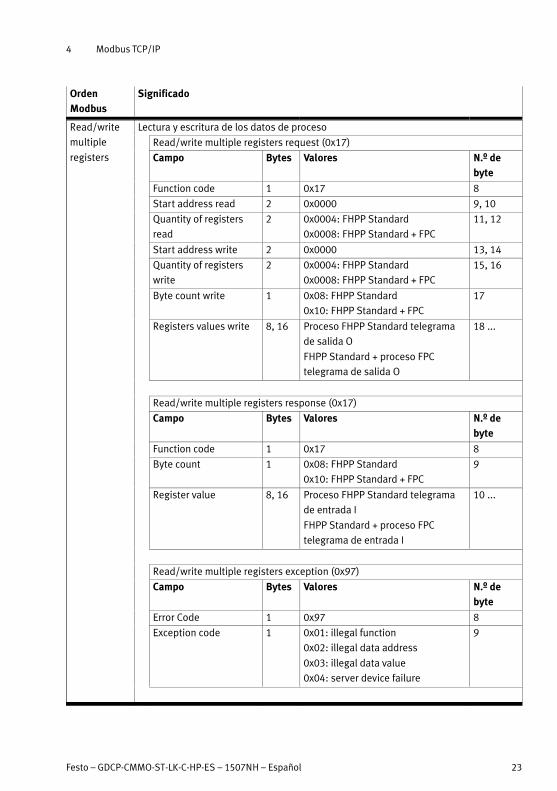
Read holding
registers
Lectura de los datos de proceso
Read holding registers request (0x03)
Campo Bytes Valores N.º debyte
Function code 1 0x03 8
Start address 2 0x0000 9, 10
Quantity of registers 2 0x0004: FHPP Standard
0x0008: FHPP Standard + FPC
11, 12
Read holding registers response (0x03)
Campo Bytes Valores N.º debyte
Function code 1 0x03 8
Byte count 1 0x08: FHPP Standard
0x10: FHPP Standard + FPC
9
Register value 8, 16 FHPP Standard I/O y FPC 10 ...
Read holding registers exception (0x83)
Campo Bytes Valores N.º debyte
Error Code 1 0x83 8
Exception code 1 0x01: illegal function
0x02: illegal data address
0x03: illegal data value
0x04: server device failure
9
4 Modbus TCP/IP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 25
OrdenModbus
Significado
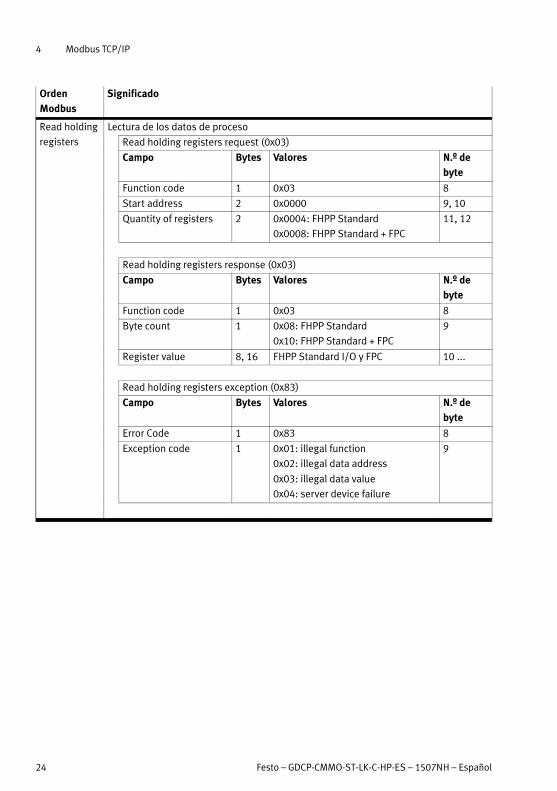
Write
multiple
registers
Escritura de los datos de proceso
Write multiple registers request (0x10)
Campo Bytes Valores N.º debyte
Function code 1 0x10 8
Start address 2 0x0000 9, 10
Quantity of registers 2 0x0004: FHPP Standard
0x0008: FHPP Standard + FPC
11, 12
Byte count 1 0x08: FHPP Standard
0x10: FHPP Standard + FPC
13
Register value 8, 16 Proceso FHPP Standard telegrama
de salida O
FHPP FHPP Standard + proceso FPC
telegrama de salida O
14 ...
Write multiple registers response (0x10)
Campo Bytes Valores N.º debyte
Function code 1 0x10 8
Start address 2 0x0000 9, 10
Quantity of registers 2 0x0004: FHPP Standard
0x0008: FHPP Standard + FPC
11, 12
Write multiple registers exception (0x90)
Campo Bytes Valores N.º debyte
Error Code 1 0x90 8
Exception code 1 0x01: illegal function
0x02: illegal data address
0x03: illegal data value
0x04: server device failure
9
4 Modbus TCP/IP
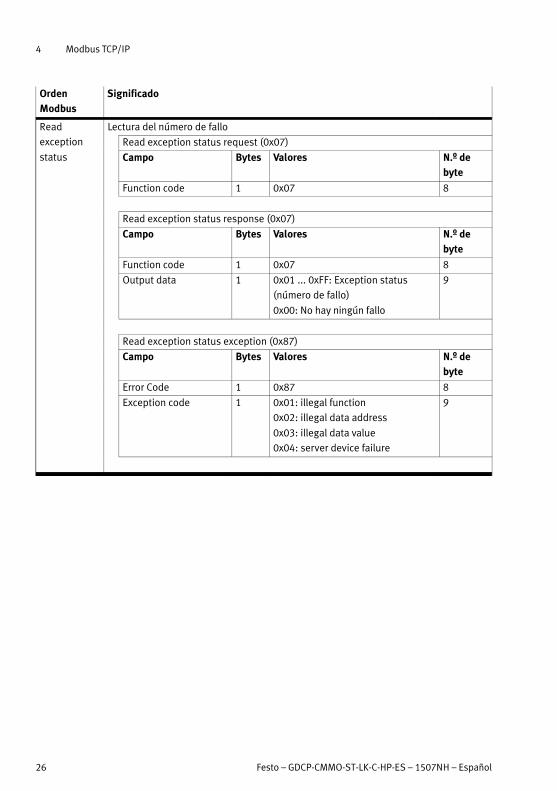
26 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
OrdenModbus
Significado
Read
exception
status
Lectura del número de fallo
Read exception status request (0x07)
Campo Bytes Valores N.º debyte
Function code 1 0x07 8
Read exception status response (0x07)
Campo Bytes Valores N.º debyte
Function code 1 0x07 8
Output data 1 0x01 ... 0xFF: Exception status
(número de fallo)
0x00: No hay ningún fallo
9
Read exception status exception (0x87)
Campo Bytes Valores N.º debyte
Error Code 1 0x87 8
Exception code 1 0x01: illegal function
0x02: illegal data address
0x03: illegal data value
0x04: server device failure
9
4 Modbus TCP/IP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 27
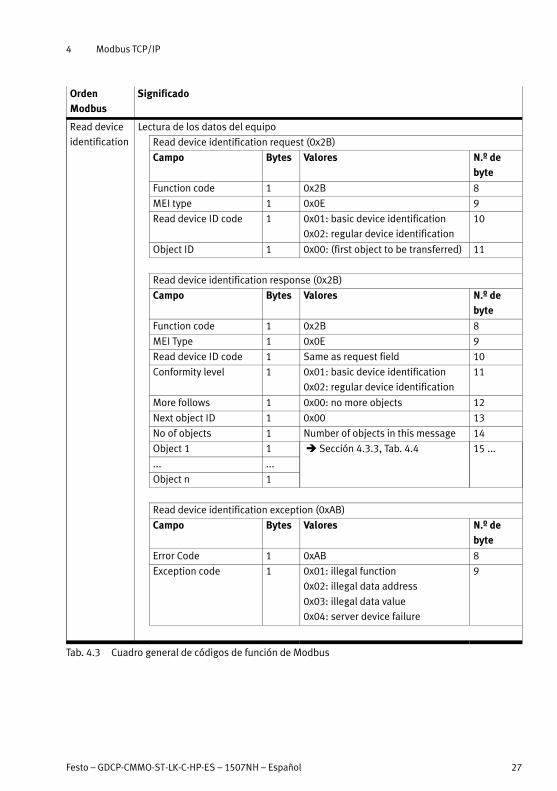
OrdenModbus
Significado
Read device
identification
Lectura de los datos del equipo
Read device identification request (0x2B)
Campo Bytes Valores N.º debyte
Function code 1 0x2B 8
MEI type 1 0x0E 9
Read device ID code 1 0x01: basic device identification
0x02: regular device identification
10
Object ID 1 0x00: (first object to be transferred) 11
Read device identification response (0x2B)
Campo Bytes Valores N.º debyte
Function code 1 0x2B 8
MEI Type 1 0x0E 9
Read device ID code 1 Same as request field 10
Conformity level 1 0x01: basic device identification
0x02: regular device identification
11
More follows 1 0x00: no more objects 12
Next object ID 1 0x00 13
No of objects 1 Number of objects in this message 14
Object 1 1 � Sección 4.3.3, Tab. 4.4 15 ...
... ...
Object n 1
Read device identification exception (0xAB)
Campo Bytes Valores N.º debyte
Error Code 1 0xAB 8
Exception code 1 0x01: illegal function
0x02: illegal data address
0x03: illegal data value
0x04: server device failure
9
Tab. 4.3 Cuadro general de códigos de función de Modbus
4 Modbus TCP/IP
28 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
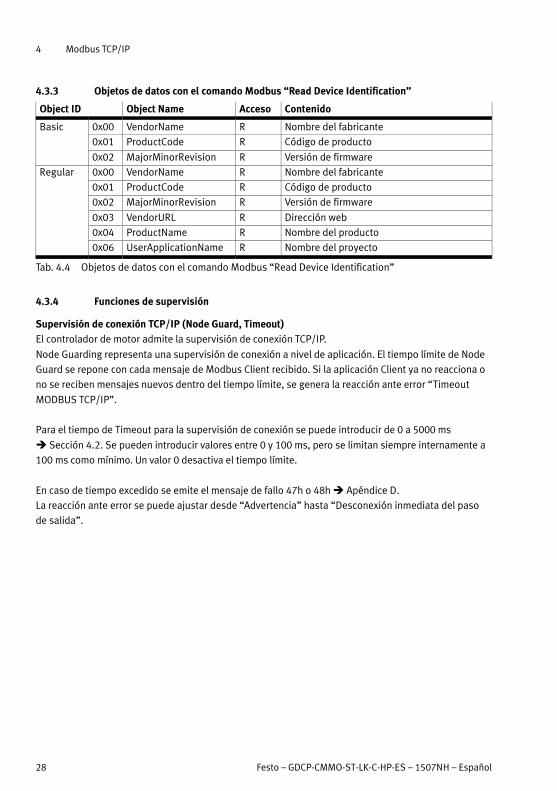
4.3.3 Objetos de datos con el comando Modbus “Read Device Identification”
Object ID Object Name Acceso Contenido
Basic 0x00 VendorName R Nombre del fabricante
0x01 ProductCode R Código de producto
0x02 MajorMinorRevision R Versión de firmware
Regular 0x00 VendorName R Nombre del fabricante
0x01 ProductCode R Código de producto
0x02 MajorMinorRevision R Versión de firmware
0x03 VendorURL R Dirección web
0x04 ProductName R Nombre del producto
0x06 UserApplicationName R Nombre del proyecto
Tab. 4.4 Objetos de datos con el comando Modbus “Read Device Identification”
4.3.4 Funciones de supervisión
Supervisión de conexión TCP/IP (Node Guard, Timeout)El controlador de motor admite la supervisión de conexión TCP/IP.
Node Guarding representa una supervisión de conexión a nivel de aplicación. El tiempo límite de Node
Guard se repone con cada mensaje de Modbus Client recibido. Si la aplicación Client ya no reacciona o
no se reciben mensajes nuevos dentro del tiempo límite, se genera la reacción ante error “Timeout
MODBUS TCP/IP”.
Para el tiempo de Timeout para la supervisión de conexión se puede introducir de 0 a 5000 ms
� Sección 4.2. Se pueden introducir valores entre 0 y 100 ms, pero se limitan siempre internamente a
100 ms como mínimo. Un valor 0 desactiva el tiempo límite.
En caso de tiempo excedido se emite el mensaje de fallo 47h o 48h � Apéndice D.
La reacción ante error se puede ajustar desde “Advertencia” hasta “Desconexión inmediata del paso
de salida”.
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 29
5 Control secuencial y datos I/O
5.1 Valor de referencia (modos de funcionamiento FHPP)
Los modos de funcionamiento FHPP difieren en relación a su contenido y al significado de los datos cíclicosde I/O y en las funciones a las que puede accederse en el controlador de motor.
Modo de funcionamiento
Descripción
Selección defrase
En el controlador de motor se puede memorizar un número específico de frases deposicionamiento. Una frase contiene todos los parámetros que están especificadospara una tarea de posicionamiento. El número de frase se transfiere a los datoscíclicos de I/O como valor nominal o actual.
Tarea directa La tarea de posicionamiento se transmite directamente en el telegrama de I/O. Conello se transfieren los valores de referencia más importantes (posición, velocidad,momento). Los parámetros complementarios (p. ej. aceleración) están definidos porla parametrización.
Tab. 5.1 Resumen de los modos de funcionamiento de FHPP en el controlador de motor CMMO-ST
5.1.1 Conmutación del modo de funcionamiento FHPP
El modo de funcionamiento FHPP se conmuta mediante el byte de control CCON (véase más adelante) y secomunica mediante la palabra de estado SCON. La conmutación entre la selección de frase y la tarea directasolo está permitida en el estado “Preparado” � Sección 5.2, Fig. 5.1.
5.1.2 Selección de fraseCada controlador de motor dispone de un determinado número de frases que contienen la informaciónnecesaria para una tarea de posicionamiento. El número del frase que debe ejecutar el controlador de motoren el siguiente arranque se transfiere en los datos de salida del control. El controlador de motor comunica elúltimo número de frase ejecutado en los datos de entrada del control. La propia tarea de posicionamientono debe estar necesariamente activa.El controlador de motor no admite ningún modo automático y, por tanto, ningún programa del usuario. Elloimpide que el controlador de motor pueda realizar tareas prácticas autónomamente; para ello es precisoque haya un estrecha sincronización con el control. Sin embargo, sí es posible encadenar varias frases yejecutarlas una tras otra mediante un comando de arranque. También es posible ejecutar una conmutaciónde frases antes de alcanzar la posición de destino.
Ello permite crear perfiles de posicionamiento sin que lleguen a surtir efecto los tiemposde retardo provocados por la transmisión a través del bus de campo y el tiempo de ciclodel control.
5.1.3 Tarea directaEn el modo de tarea directa, las tareas de posicionamiento se formulan directamente en los datos de salidadel control.La aplicación típica calcula dinámicamente los valores de destino nominales. De este modo se puede, p. ej.,lograr una adaptación a diferentes tamaños de piezas sin tener que parametrizar de nuevo la lista de frases.Los datos de posicionamiento son administrados completamente en el control y enviados directamente alcontrolador de motor.
5 Control secuencial y datos I/O
30 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
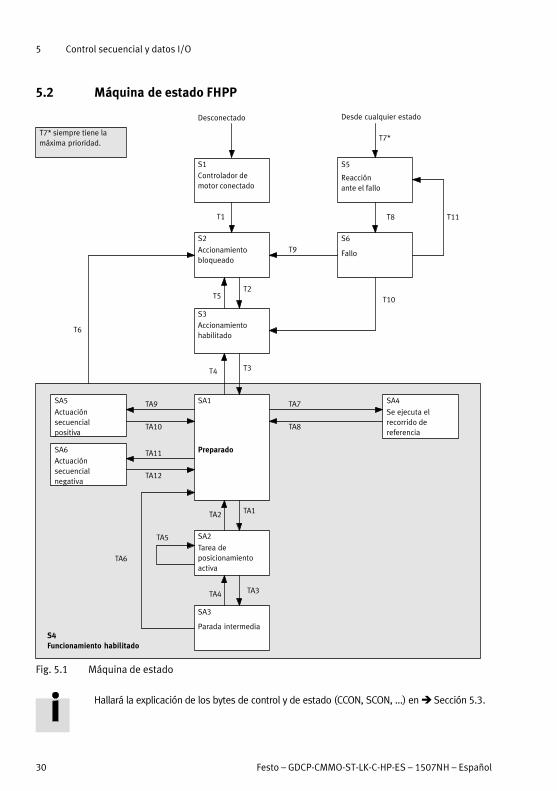
5.2 Máquina de estado FHPP
T7* siempre tiene lamáxima prioridad.
Desconectado
S1
Controlador demotor conectado
S3
Accionamiento habilitado
S2
Accionamiento bloqueado
SA1
Preparado
SA5
Actuación secuencial positiva
SA6
Actuación secuencial negativa
SA4
Se ejecuta el recorrido dereferencia
SA2
Tarea de posicionamiento activa
SA3
Parada intermedia
S5
Reacción ante el fallo
S6
Fallo
Desde cualquier estado
S4Funcionamiento habilitado
T6
TA11
TA12
TA9
TA10
TA3
TA6
TA4
TA5
TA7
TA8
TA1TA2
T2T5
T3T4
T1
T7*
T8
T10
T9
S5
T11
Fig. 5.1 Máquina de estado
Hallará la explicación de los bytes de control y de estado (CCON, SCON, ...) en � Sección 5.3.
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 31
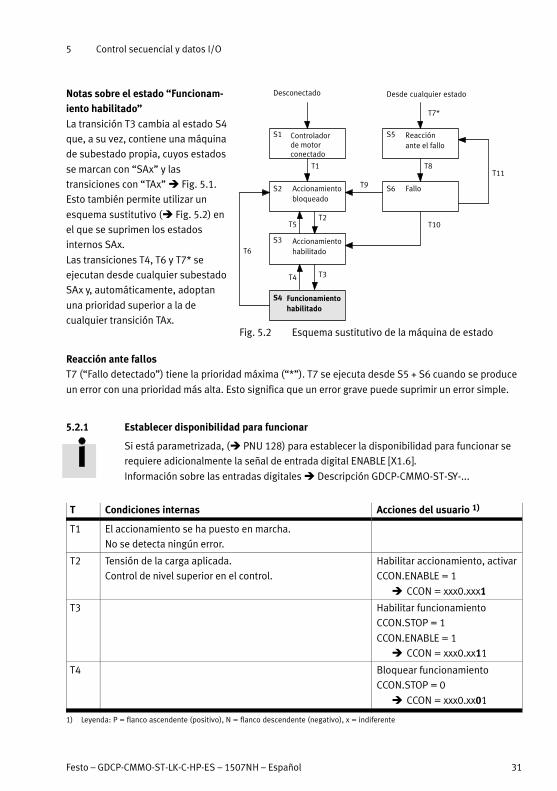
Notas sobre el estado “Funcionamiento habilitado”
La transición T3 cambia al estado S4
que, a su vez, contiene una máquina
de subestado propia, cuyos estados
se marcan con “SAx” y las
transiciones con “TAx” � Fig. 5.1.
Esto también permite utilizar un
esquema sustitutivo (� Fig. 5.2) en
el que se suprimen los estados
internos SAx.
Las transiciones T4, T6 y T7* se
ejecutan desde cualquier subestado
SAx y, automáticamente, adoptan
una prioridad superior a la de
cualquier transición TAx.
Desconectado
S1 Controlador de motorconectado
S3 Accionamiento habilitado
S2 Accionamiento bloqueado
S5 Reacción ante el fallo
S6 Fallo
Desde cualquier estado
Funcionamiento habilitado
T6
T2T5
T3T4
T1
T7*
T8
T10
T9
S5
T11
S4
Fig. 5.2 Esquema sustitutivo de la máquina de estado
Reacción ante fallosT7 (“Fallo detectado”) tiene la prioridad máxima (“*”). T7 se ejecuta desde S5 + S6 cuando se produce
un error con una prioridad más alta. Esto significa que un error grave puede suprimir un error simple.
5.2.1 Establecer disponibilidad para funcionar
Si está parametrizada, (� PNU 128) para establecer la disponibilidad para funcionar se
requiere adicionalmente la señal de entrada digital ENABLE [X1.6].
Información sobre las entradas digitales � Descripción GDCP-CMMO-ST-SY-...
T Condiciones internas Acciones del usuario 1)
T1 El accionamiento se ha puesto en marcha.
No se detecta ningún error.
T2 Tensión de la carga aplicada.
Control de nivel superior en el control.
Habilitar accionamiento, activar
CCON.ENABLE = 1
� CCON = xxx0.xxx1
T3 Habilitar funcionamiento
CCON.STOP = 1
CCON.ENABLE = 1
� CCON = xxx0.xx11
T4 Bloquear funcionamiento
CCON.STOP = 0
� CCON = xxx0.xx01
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
5 Control secuencial y datos I/O
32 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
T Acciones del usuario 1)Condiciones internas
T5 Desactivar accionamiento
CCON.ENABLE = 0
� CCON = xxx0.xxx0
T6 Desactivar accionamiento
CCON.ENABLE = 0
� CCON = xxx0.xxx0
T7* Fallo detectado.
T8 Reacción ante fallo concluida, accionamiento detenido.
T9 Ya no hay ningún fallo.
Era un error grave.
Validar fallo
CCON.RESET = 0 } 1
CCON.ENABLE = 0
� CCON = xxx0.Pxx0
T10 Ya no hay ningún fallo.
Era un error leve.
Nota: T10 permite validar fallos sin tener que desconectar
el controlador.
Validar fallo
CCON.RESET = 0 } 1
CCON.ENABLE = 0
� CCON = xxx0.Pxx1
T11 El fallo aún existe. Validar fallo
CCON.RESET = 0 } 1
� CCON = xxx0.Pxxx
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.2 Transiciones de estado al establecer disponibilidad para funcionar
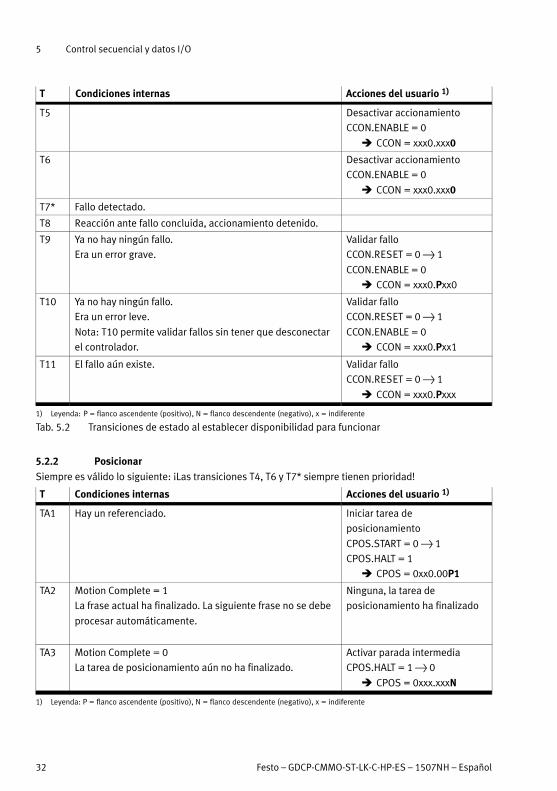
5.2.2 Posicionar
Siempre es válido lo siguiente: ¡Las transiciones T4, T6 y T7* siempre tienen prioridad!
T Condiciones internas Acciones del usuario 1)
TA1 Hay un referenciado. Iniciar tarea de
posicionamiento
CPOS.START = 0 } 1
CPOS.HALT = 1
� CPOS = 0xx0.00P1
TA2 Motion Complete = 1
La frase actual ha finalizado. La siguiente frase no se debe
procesar automáticamente.
Ninguna, la tarea de
posicionamiento ha finalizado
TA3 Motion Complete = 0
La tarea de posicionamiento aún no ha finalizado.
Activar parada intermedia
CPOS.HALT = 1 } 0
� CPOS = 0xxx.xxxN
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 33
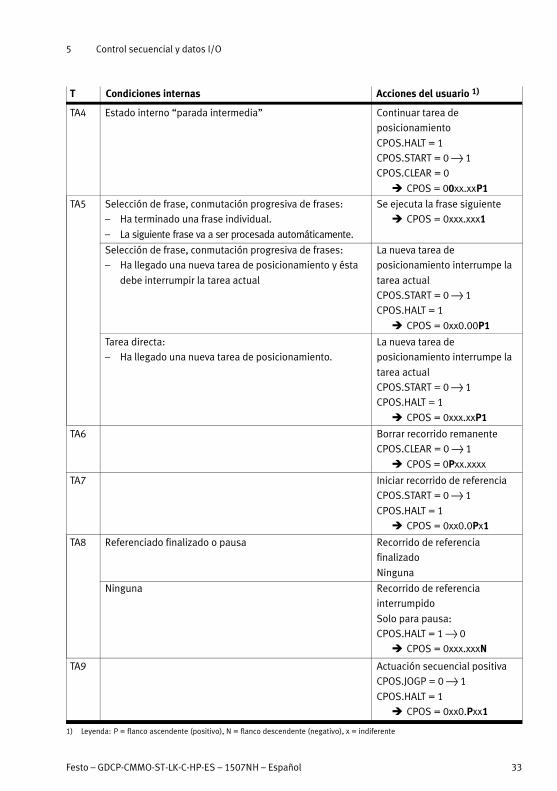
T Acciones del usuario 1)Condiciones internas
TA4 Estado interno “parada intermedia” Continuar tarea de
posicionamiento
CPOS.HALT = 1
CPOS.START = 0 } 1
CPOS.CLEAR = 0
� CPOS = 00xx.xxP1
TA5 Selección de frase, conmutación progresiva de frases:
– Ha terminado una frase individual.
– La siguiente frase va a ser procesada automáticamente.
Se ejecuta la frase siguiente
� CPOS = 0xxx.xxx1
Selección de frase, conmutación progresiva de frases:
– Ha llegado una nueva tarea de posicionamiento y ésta
debe interrumpir la tarea actual
La nueva tarea de
posicionamiento interrumpe la
tarea actual
CPOS.START = 0 } 1
CPOS.HALT = 1
� CPOS = 0xx0.00P1
Tarea directa:
– Ha llegado una nueva tarea de posicionamiento.
La nueva tarea de
posicionamiento interrumpe la
tarea actual
CPOS.START = 0 } 1
CPOS.HALT = 1
� CPOS = 0xxx.xxP1
TA6 Borrar recorrido remanente
CPOS.CLEAR = 0 } 1
� CPOS = 0Pxx.xxxx
TA7 Iniciar recorrido de referencia
CPOS.START = 0 } 1
CPOS.HALT = 1
� CPOS = 0xx0.0Px1
TA8 Referenciado finalizado o pausa Recorrido de referencia
finalizado
Ninguna
Ninguna Recorrido de referencia
interrumpido
Solo para pausa:
CPOS.HALT = 1 } 0
� CPOS = 0xxx.xxxN
TA9 Actuación secuencial positiva
CPOS.JOGP = 0 } 1
CPOS.HALT = 1
� CPOS = 0xx0.Pxx1
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
5 Control secuencial y datos I/O
34 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
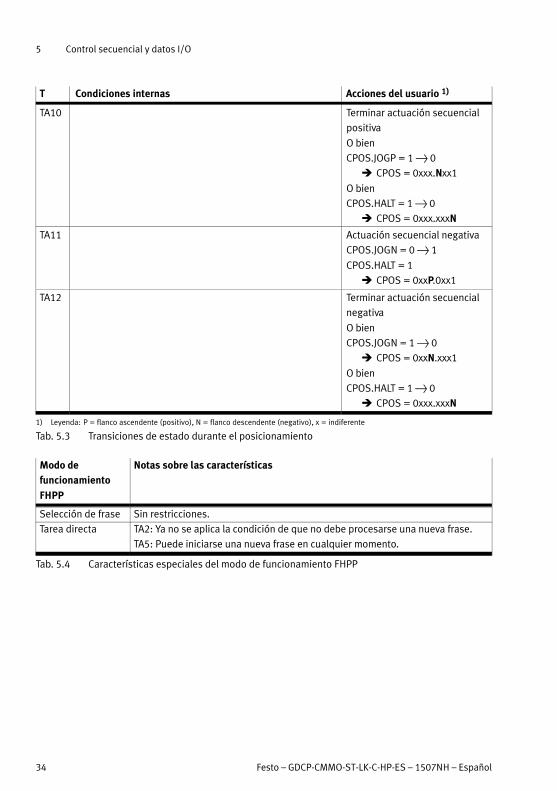
T Acciones del usuario 1)Condiciones internas
TA10 Terminar actuación secuencial
positiva
O bien
CPOS.JOGP = 1 } 0
� CPOS = 0xxx.Nxx1
O bien
CPOS.HALT = 1 } 0
� CPOS = 0xxx.xxxN
TA11 Actuación secuencial negativa
CPOS.JOGN = 0 } 1
CPOS.HALT = 1
� CPOS = 0xxP.0xx1
TA12 Terminar actuación secuencial
negativa
O bien
CPOS.JOGN = 1 } 0
� CPOS = 0xxN.xxx1
O bien
CPOS.HALT = 1 } 0
� CPOS = 0xxx.xxxN
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.3 Transiciones de estado durante el posicionamiento
Modo defuncionamiento
FHPP
Notas sobre las características
Selección de frase Sin restricciones.
Tarea directa TA2: Ya no se aplica la condición de que no debe procesarse una nueva frase.
TA5: Puede iniciarse una nueva frase en cualquier momento.
Tab. 5.4 Características especiales del modo de funcionamiento FHPP
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 35
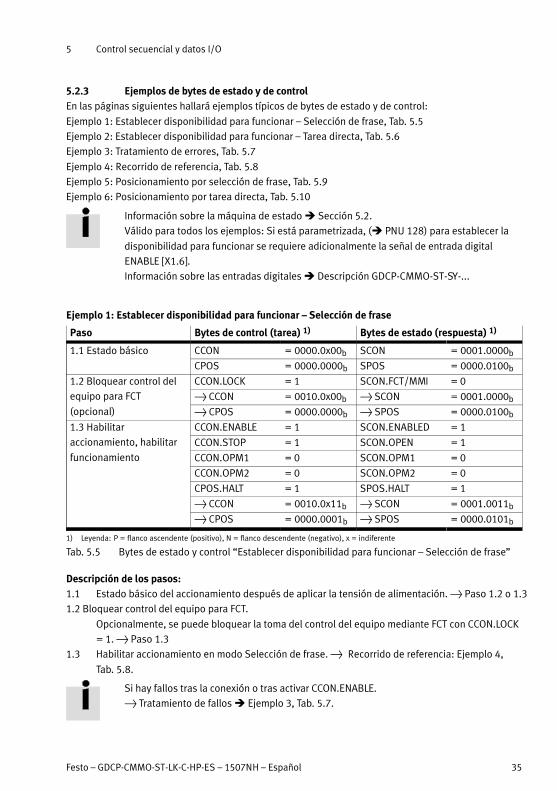
5.2.3 Ejemplos de bytes de estado y de controlEn las páginas siguientes hallará ejemplos típicos de bytes de estado y de control:
Ejemplo 1: Establecer disponibilidad para funcionar – Selección de frase, Tab. 5.5
Ejemplo 2: Establecer disponibilidad para funcionar – Tarea directa, Tab. 5.6
Ejemplo 3: Tratamiento de errores, Tab. 5.7
Ejemplo 4: Recorrido de referencia, Tab. 5.8
Ejemplo 5: Posicionamiento por selección de frase, Tab. 5.9
Ejemplo 6: Posicionamiento por tarea directa, Tab. 5.10
Información sobre la máquina de estado � Sección 5.2.
Válido para todos los ejemplos: Si está parametrizada, (� PNU 128) para establecer la
disponibilidad para funcionar se requiere adicionalmente la señal de entrada digital
ENABLE [X1.6].
Información sobre las entradas digitales � Descripción GDCP-CMMO-ST-SY-...
Ejemplo 1: Establecer disponibilidad para funcionar – Selección de frase
Paso Bytes de control (tarea) 1) Bytes de estado (respuesta) 1)
1.1 Estado básico CCON = 0000.0x00b SCON = 0001.0000b
CPOS = 0000.0000b SPOS = 0000.0100b
1.2 Bloquear control del
equipo para FCT
(opcional)
CCON.LOCK = 1 SCON.FCT/MMI = 0
} CCON = 0010.0x00b } SCON = 0001.0000b
} CPOS = 0000.0000b } SPOS = 0000.0100b
1.3 Habilitar
accionamiento, habilitar
funcionamiento
CCON.ENABLE = 1 SCON.ENABLED = 1
CCON.STOP = 1 SCON.OPEN = 1
CCON.OPM1 = 0 SCON.OPM1 = 0
CCON.OPM2 = 0 SCON.OPM2 = 0
CPOS.HALT = 1 SPOS.HALT = 1
} CCON = 0010.0x11b } SCON = 0001.0011b
} CPOS = 0000.0001b } SPOS = 0000.0101b
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.5 Bytes de estado y control “Establecer disponibilidad para funcionar – Selección de frase”
Descripción de los pasos:1.1 Estado básico del accionamiento después de aplicar la tensión de alimentación. } Paso 1.2 o 1.3
1.2 Bloquear control del equipo para FCT.
Opcionalmente, se puede bloquear la toma del control del equipo mediante FCT con CCON.LOCK
= 1. } Paso 1.3
1.3 Habilitar accionamiento en modo Selección de frase. } Recorrido de referencia: Ejemplo 4,
Tab. 5.8.
Si hay fallos tras la conexión o tras activar CCON.ENABLE.
} Tratamiento de fallos � Ejemplo 3, Tab. 5.7.
5 Control secuencial y datos I/O
36 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
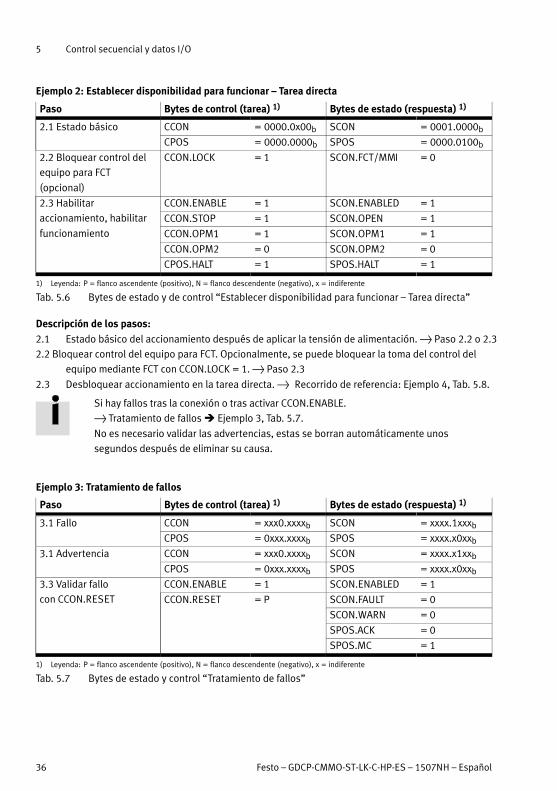
Ejemplo 2: Establecer disponibilidad para funcionar – Tarea directa
Paso Bytes de control (tarea) 1) Bytes de estado (respuesta) 1)
2.1 Estado básico CCON = 0000.0x00b SCON = 0001.0000b
CPOS = 0000.0000b SPOS = 0000.0100b
2.2 Bloquear control del
equipo para FCT
(opcional)
CCON.LOCK = 1 SCON.FCT/MMI = 0
2.3 Habilitar
accionamiento, habilitar
funcionamiento
CCON.ENABLE = 1 SCON.ENABLED = 1
CCON.STOP = 1 SCON.OPEN = 1
CCON.OPM1 = 1 SCON.OPM1 = 1
CCON.OPM2 = 0 SCON.OPM2 = 0
CPOS.HALT = 1 SPOS.HALT = 1
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.6 Bytes de estado y de control “Establecer disponibilidad para funcionar – Tarea directa”
Descripción de los pasos:
2.1 Estado básico del accionamiento después de aplicar la tensión de alimentación. } Paso 2.2 o 2.3
2.2 Bloquear control del equipo para FCT. Opcionalmente, se puede bloquear la toma del control del
equipo mediante FCT con CCON.LOCK = 1. } Paso 2.3
2.3 Desbloquear accionamiento en la tarea directa. } Recorrido de referencia: Ejemplo 4, Tab. 5.8.
Si hay fallos tras la conexión o tras activar CCON.ENABLE.
} Tratamiento de fallos � Ejemplo 3, Tab. 5.7.
No es necesario validar las advertencias, estas se borran automáticamente unos
segundos después de eliminar su causa.
Ejemplo 3: Tratamiento de fallos
Paso Bytes de control (tarea) 1) Bytes de estado (respuesta) 1)
3.1 Fallo CCON = xxx0.xxxxb SCON = xxxx.1xxxb
CPOS = 0xxx.xxxxb SPOS = xxxx.x0xxb
3.1 Advertencia CCON = xxx0.xxxxb SCON = xxxx.x1xxb
CPOS = 0xxx.xxxxb SPOS = xxxx.x0xxb
3.3 Validar fallo
con CCON.RESET
CCON.ENABLE = 1 SCON.ENABLED = 1
CCON.RESET = P SCON.FAULT = 0
SCON.WARN = 0
SPOS.ACK = 0
SPOS.MC = 1
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.7 Bytes de estado y control “Tratamiento de fallos”
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 37
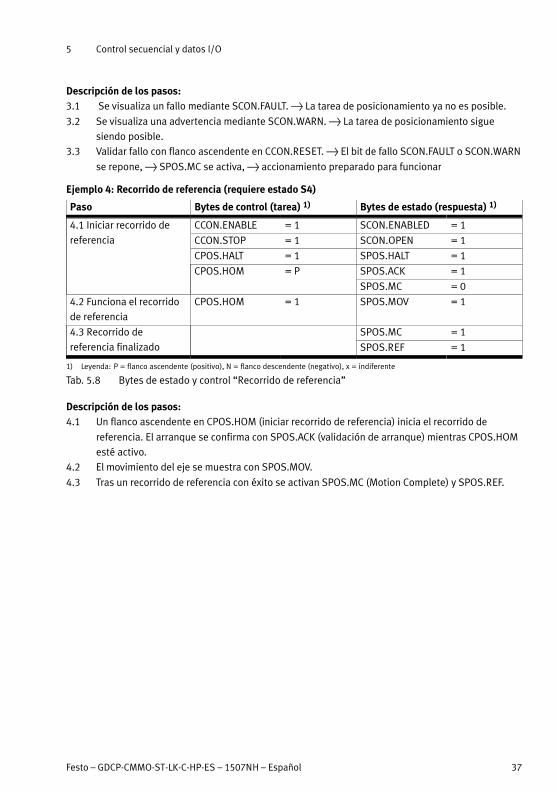
Descripción de los pasos:3.1 Se visualiza un fallo mediante SCON.FAULT. } La tarea de posicionamiento ya no es posible.
3.2 Se visualiza una advertencia mediante SCON.WARN. } La tarea de posicionamiento sigue
siendo posible.
3.3 Validar fallo con flanco ascendente en CCON.RESET. } El bit de fallo SCON.FAULT o SCON.WARN
se repone, } SPOS.MC se activa, } accionamiento preparado para funcionar
Ejemplo 4: Recorrido de referencia (requiere estado S4)
Paso Bytes de control (tarea) 1) Bytes de estado (respuesta) 1)
4.1 Iniciar recorrido de
referencia
CCON.ENABLE = 1 SCON.ENABLED = 1
CCON.STOP = 1 SCON.OPEN = 1
CPOS.HALT = 1 SPOS.HALT = 1
CPOS.HOM = P SPOS.ACK = 1
SPOS.MC = 0
4.2 Funciona el recorrido
de referencia
CPOS.HOM = 1 SPOS.MOV = 1
4.3 Recorrido de
referencia finalizado
SPOS.MC = 1
SPOS.REF = 1
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.8 Bytes de estado y control “Recorrido de referencia”
Descripción de los pasos:4.1 Un flanco ascendente en CPOS.HOM (iniciar recorrido de referencia) inicia el recorrido de
referencia. El arranque se confirma con SPOS.ACK (validación de arranque) mientras CPOS.HOM
esté activo.
4.2 El movimiento del eje se muestra con SPOS.MOV.
4.3 Tras un recorrido de referencia con éxito se activan SPOS.MC (Motion Complete) y SPOS.REF.
5 Control secuencial y datos I/O
38 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
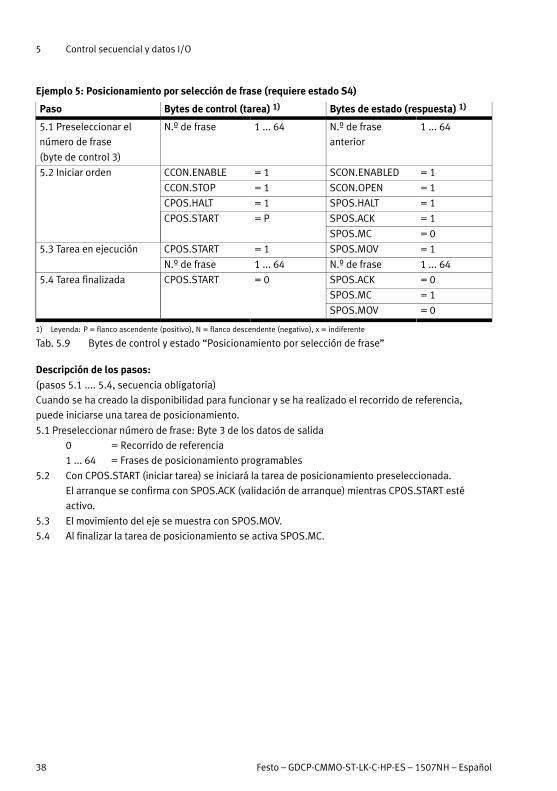
Ejemplo 5: Posicionamiento por selección de frase (requiere estado S4)
Paso Bytes de control (tarea) 1) Bytes de estado (respuesta) 1)
5.1 Preseleccionar el
número de frase
(byte de control 3)
N.º de frase 1 ... 64 N.º de frase
anterior
1 ... 64
5.2 Iniciar orden CCON.ENABLE = 1 SCON.ENABLED = 1
CCON.STOP = 1 SCON.OPEN = 1
CPOS.HALT = 1 SPOS.HALT = 1
CPOS.START = P SPOS.ACK = 1
SPOS.MC = 0
5.3 Tarea en ejecución CPOS.START = 1 SPOS.MOV = 1
N.º de frase 1 ... 64 N.º de frase 1 ... 64
5.4 Tarea finalizada CPOS.START = 0 SPOS.ACK = 0
SPOS.MC = 1
SPOS.MOV = 0
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente
Tab. 5.9 Bytes de control y estado “Posicionamiento por selección de frase”
Descripción de los pasos:
(pasos 5.1 .... 5.4, secuencia obligatoria)
Cuando se ha creado la disponibilidad para funcionar y se ha realizado el recorrido de referencia,
puede iniciarse una tarea de posicionamiento.
5.1 Preseleccionar número de frase: Byte 3 de los datos de salida
0 = Recorrido de referencia
1 ... 64 = Frases de posicionamiento programables
5.2 Con CPOS.START (iniciar tarea) se iniciará la tarea de posicionamiento preseleccionada.
El arranque se confirma con SPOS.ACK (validación de arranque) mientras CPOS.START esté
activo.
5.3 El movimiento del eje se muestra con SPOS.MOV.
5.4 Al finalizar la tarea de posicionamiento se activa SPOS.MC.
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 39
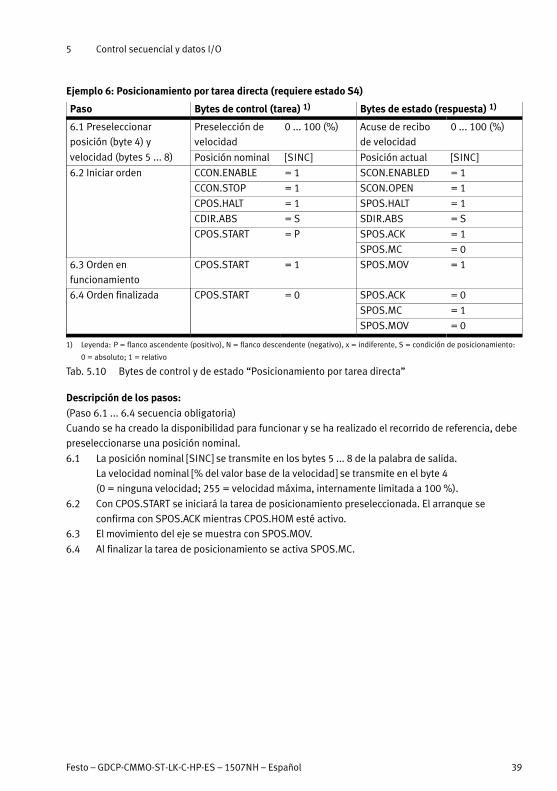
Ejemplo 6: Posicionamiento por tarea directa (requiere estado S4)
Paso Bytes de control (tarea) 1) Bytes de estado (respuesta) 1)
6.1 Preseleccionar
posición (byte 4) y
velocidad (bytes 5 ... 8)
Preselección de
velocidad
0 ... 100 (%) Acuse de recibo
de velocidad
0 ... 100 (%)
Posición nominal [SINC] Posición actual [SINC]
6.2 Iniciar orden CCON.ENABLE = 1 SCON.ENABLED = 1
CCON.STOP = 1 SCON.OPEN = 1
CPOS.HALT = 1 SPOS.HALT = 1
CDIR.ABS = S SDIR.ABS = S
CPOS.START = P SPOS.ACK = 1
SPOS.MC = 0
6.3 Orden en
funcionamiento
CPOS.START = 1 SPOS.MOV = 1
6.4 Orden finalizada CPOS.START = 0 SPOS.ACK = 0
SPOS.MC = 1
SPOS.MOV = 0
1) Leyenda: P = flanco ascendente (positivo), N = flanco descendente (negativo), x = indiferente, S = condición de posicionamiento:
0 = absoluto; 1 = relativo
Tab. 5.10 Bytes de control y de estado “Posicionamiento por tarea directa”
Descripción de los pasos:
(Paso 6.1 ... 6.4 secuencia obligatoria)
Cuando se ha creado la disponibilidad para funcionar y se ha realizado el recorrido de referencia, debe
preseleccionarse una posición nominal.
6.1 La posición nominal [SINC] se transmite en los bytes 5 ... 8 de la palabra de salida.
La velocidad nominal [% del valor base de la velocidad] se transmite en el byte 4
(0 = ninguna velocidad; 255 = velocidad máxima, internamente limitada a 100 %).
6.2 Con CPOS.START se iniciará la tarea de posicionamiento preseleccionada. El arranque se
confirma con SPOS.ACK mientras CPOS.HOM esté activo.
6.3 El movimiento del eje se muestra con SPOS.MOV.
6.4 Al finalizar la tarea de posicionamiento se activa SPOS.MC.
5 Control secuencial y datos I/O
40 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
5.3 Estructura de los datos I/O
5.3.1 Concepto
El protocolo FHPP prevé siempre 8 bytes para los datos de entrada y de salida. De estos, el primer byte
es fijo. Se mantiene en cada modo de funcionamiento FHPP y controla la habilitación del controlador de
motor y de los modos de funcionamiento FHPP. Los demás bytes dependen del modo de
funcionamiento FHPP seleccionado. Aquí pueden transferirse otros bytes de estado o de control y
valores nominales y efectivos.
En los datos cíclicos se permiten otros datos para transmitir parámetros de acuerdo con el protocolo
FPC.
Un control intercambia los siguientes datos a través de FHPP:
– Datos de control y de estado (8 bytes):
– bytes de control y de estado
– número de frase o posición nominal en los datos de salida,
– acuse de recibo de la posición real y número de frase en los datos de entrada
– otros valores nominales y efectivos dependientes del modo de funcionamiento
– Si es necesario, se pueden utilizar más datos de entrada y de salida (8 bytes) para la
parametrización conforme a FPC � Apéndice C.
Dado el caso, observe la especificación del master de bus para representar palabras y
palabras dobles (Intel/Motorola). Por ejemplo, a través de Modbus la representación se
efectúa como “big endian” (byte de orden superior primero).
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 41
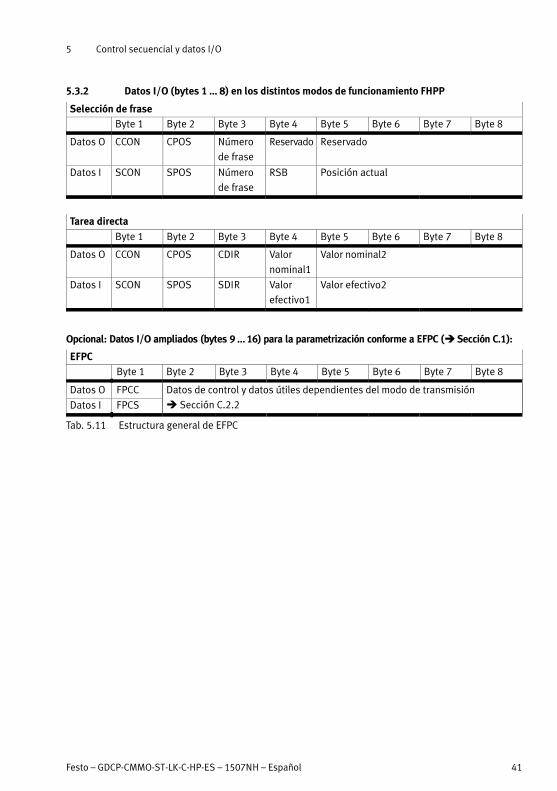
5.3.2 Datos I/O (bytes 1 … 8) en los distintos modos de funcionamiento FHPP
Selección de fraseByte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS Número
de frase
Reservado Reservado
Datos I SCON SPOS Número
de frase
RSB Posición actual
Tarea directa
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O CCON CPOS CDIR Valor
nominal1
Valor nominal2
Datos I SCON SPOS SDIR Valor
efectivo1
Valor efectivo2
Opcional: Datos I/O ampliados (bytes 9 … 16) para la parametrización conforme a EFPC (� Sección C.1):
EFPCByte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O FPCC Datos de control y datos útiles dependientes del modo de transmisión
� Sección C.2.2Datos I FPCS
Tab. 5.11 Estructura general de EFPC
5 Control secuencial y datos I/O
42 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
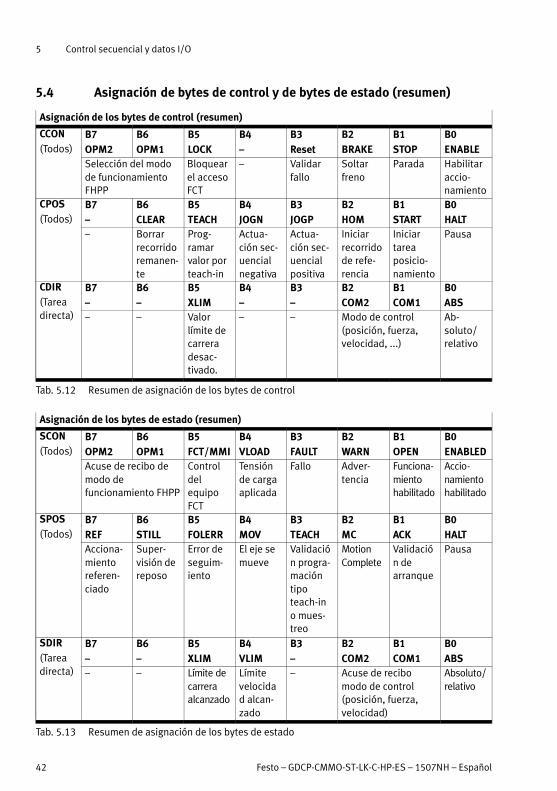
5.4 Asignación de bytes de control y de bytes de estado (resumen)
Asignación de los bytes de control (resumen)
CCON(Todos)
B7OPM2
B6OPM1
B5LOCK
B4–
B3Reset
B2BRAKE
B1STOP
B0ENABLE
Selección del modode funcionamientoFHPP
Bloquearel accesoFCT
– Validarfallo
Soltarfreno
Parada Habilitaraccionamiento
CPOS(Todos)
B7–
B6CLEAR
B5TEACH
B4JOGN
B3JOGP
B2HOM
B1START
B0HALT
– Borrarrecorridoremanente
Programarvalor porteach-in
Actuación secuencialnegativa
Actuación secuencialpositiva
Iniciarrecorridode referencia
Iniciartareaposicionamiento
Pausa
CDIR(Tareadirecta)
B7–
B6–
B5XLIM
B4–
B3–
B2COM2
B1COM1
B0ABS
– – Valorlímite decarreradesactivado.
– – Modo de control (posición, fuerza,velocidad, ...)
Absoluto/relativo
Tab. 5.12 Resumen de asignación de los bytes de control
Asignación de los bytes de estado (resumen)
SCON(Todos)
B7OPM2
B6OPM1
B5FCT/MMI
B4VLOAD
B3FAULT
B2WARN
B1OPEN
B0ENABLED
Acuse de recibo demodo defuncionamiento FHPP
ControldelequipoFCT
Tensiónde cargaaplicada
Fallo Advertencia
Funcionamientohabilitado
Accionamientohabilitado
SPOS(Todos)
B7REF
B6STILL
B5FOLERR
B4MOV
B3TEACH
B2MC
B1ACK
B0HALT
Accionamientoreferenciado
Supervisión dereposo
Error deseguimiento
El eje semueve
Validación programacióntipoteach-ino muestreo
MotionComplete
Validación dearranque
Pausa
SDIR(Tareadirecta)
B7–
B6–
B5XLIM
B4VLIM
B3–
B2COM2
B1COM1
B0ABS
– – Límite decarreraalcanzado
Límitevelocidad alcanzado
– Acuse de recibomodo de control(posición, fuerza,velocidad)
Absoluto/relativo
Tab. 5.13 Resumen de asignación de los bytes de estado
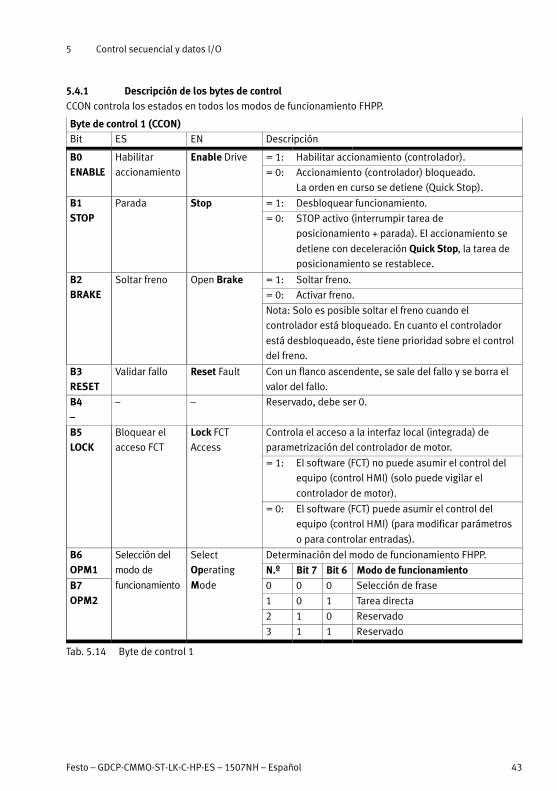
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 43
5.4.1 Descripción de los bytes de controlCCON controla los estados en todos los modos de funcionamiento FHPP.
Byte de control 1 (CCON)Bit ES EN Descripción
B0ENABLE
Habilitar
accionamiento
Enable Drive = 1: Habilitar accionamiento (controlador).
= 0: Accionamiento (controlador) bloqueado.
La orden en curso se detiene (Quick Stop).
B1STOP
Parada Stop = 1: Desbloquear funcionamiento.
= 0: STOP activo (interrumpir tarea de
posicionamiento + parada). El accionamiento se
detiene con deceleración Quick Stop, la tarea de
posicionamiento se restablece.
B2BRAKE
Soltar freno Open Brake = 1: Soltar freno.
= 0: Activar freno.
Nota: Solo es posible soltar el freno cuando el
controlador está bloqueado. En cuanto el controlador
está desbloqueado, éste tiene prioridad sobre el control
del freno.
B3RESET
Validar fallo Reset Fault Con un flanco ascendente, se sale del fallo y se borra el
valor del fallo.
B4–
– – Reservado, debe ser 0.
B5LOCK
Bloquear el
acceso FCT
Lock FCT
Access
Controla el acceso a la interfaz local (integrada) de
parametrización del controlador de motor.
= 1: El software (FCT) no puede asumir el control del
equipo (control HMI) (solo puede vigilar el
controlador de motor).
= 0: El software (FCT) puede asumir el control del
equipo (control HMI) (para modificar parámetros
o para controlar entradas).
B6OPM1
Selección del
modo de
funcionamiento
Select
Operating
Mode
Determinación del modo de funcionamiento FHPP.
N.º Bit 7 Bit 6 Modo de funcionamiento
B7OPM2
0 0 0 Selección de frase
1 0 1 Tarea directa
2 1 0 Reservado
3 1 1 Reservado
Tab. 5.14 Byte de control 1
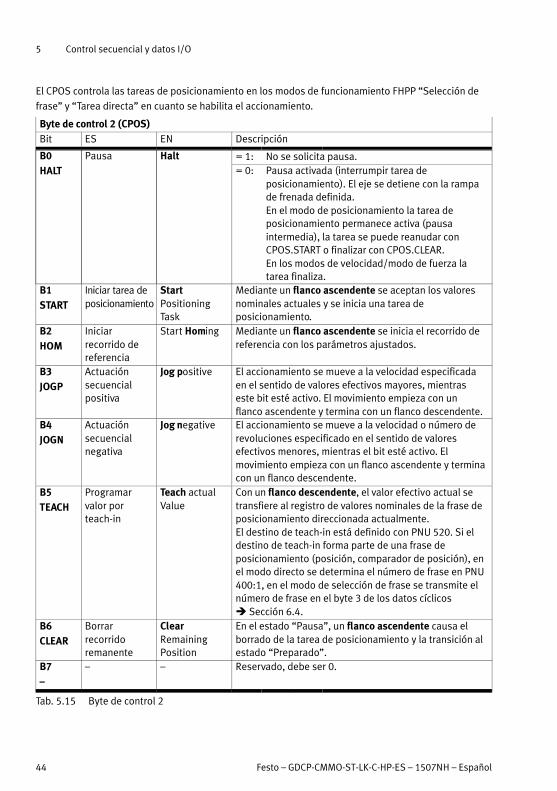
5 Control secuencial y datos I/O
44 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
El CPOS controla las tareas de posicionamiento en los modos de funcionamiento FHPP “Selección de
frase” y “Tarea directa” en cuanto se habilita el accionamiento.
Byte de control 2 (CPOS)Bit ES EN Descripción
B0HALT
Pausa Halt = 1: No se solicita pausa.= 0: Pausa activada (interrumpir tarea de
posicionamiento). El eje se detiene con la rampade frenada definida.En el modo de posicionamiento la tarea deposicionamiento permanece activa (pausaintermedia), la tarea se puede reanudar conCPOS.START o finalizar con CPOS.CLEAR.En los modos de velocidad/modo de fuerza latarea finaliza.
B1START
Iniciar tarea deposicionamiento
StartPositioningTask
Mediante un flanco ascendente se aceptan los valoresnominales actuales y se inicia una tarea deposicionamiento.
B2HOM
Iniciarrecorrido dereferencia
Start Homing Mediante un flanco ascendente se inicia el recorrido dereferencia con los parámetros ajustados.
B3JOGP
Actuaciónsecuencialpositiva
Jog positive El accionamiento se mueve a la velocidad especificadaen el sentido de valores efectivos mayores, mientraseste bit esté activo. El movimiento empieza con unflanco ascendente y termina con un flanco descendente.
B4JOGN
Actuaciónsecuencialnegativa
Jog negative El accionamiento se mueve a la velocidad o número derevoluciones especificado en el sentido de valoresefectivos menores, mientras el bit esté activo. Elmovimiento empieza con un flanco ascendente y terminacon un flanco descendente.
B5TEACH
Programarvalor porteach-in
Teach actualValue
Con un flanco descendente, el valor efectivo actual setransfiere al registro de valores nominales de la frase deposicionamiento direccionada actualmente.El destino de teach-in está definido con PNU 520. Si eldestino de teach-in forma parte de una frase deposicionamiento (posición, comparador de posición), enel modo directo se determina el número de frase en PNU400:1, en el modo de selección de frase se transmite elnúmero de frase en el byte 3 de los datos cíclicos� Sección 6.4.
B6CLEAR
Borrarrecorridoremanente
ClearRemainingPosition
En el estado “Pausa”, un flanco ascendente causa elborrado de la tarea de posicionamiento y la transición alestado “Preparado”.
B7–
– – Reservado, debe ser 0.
Tab. 5.15 Byte de control 2
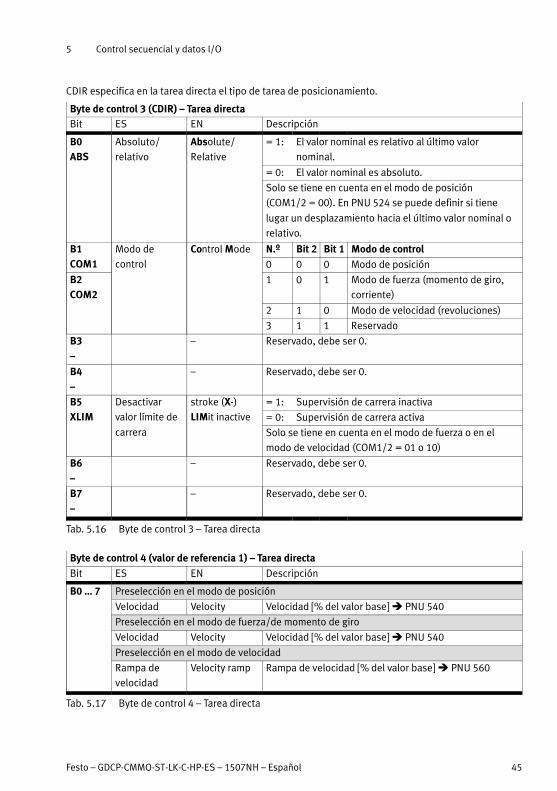
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 45
CDIR especifica en la tarea directa el tipo de tarea de posicionamiento.
Byte de control 3 (CDIR) – Tarea directaBit ES EN Descripción
B0ABS
Absoluto/
relativo
Absolute/
Relative
= 1: El valor nominal es relativo al último valor
nominal.
= 0: El valor nominal es absoluto.
Solo se tiene en cuenta en el modo de posición
(COM1/2 = 00). En PNU 524 se puede definir si tiene
lugar un desplazamiento hacia el último valor nominal o
relativo.
B1COM1
Modo de
control
Control Mode N.º Bit 2 Bit 1 Modo de control
0 0 0 Modo de posición
B2COM2
1 0 1 Modo de fuerza (momento de giro,
corriente)
2 1 0 Modo de velocidad (revoluciones)
3 1 1 Reservado
B3–
– Reservado, debe ser 0.
B4–
– Reservado, debe ser 0.
B5XLIM
Desactivar
valor límite de
carrera
stroke (X-)
LIMit inactive
= 1: Supervisión de carrera inactiva
= 0: Supervisión de carrera activa
Solo se tiene en cuenta en el modo de fuerza o en el
modo de velocidad (COM1/2 = 01 o 10)
B6–
– Reservado, debe ser 0.
B7–
– Reservado, debe ser 0.
Tab. 5.16 Byte de control 3 – Tarea directa
Byte de control 4 (valor de referencia 1) – Tarea directa
Bit ES EN Descripción
B0 … 7 Preselección en el modo de posición
Velocidad Velocity Velocidad [% del valor base] � PNU 540
Preselección en el modo de fuerza/de momento de giro
Velocidad Velocity Velocidad [% del valor base] � PNU 540
Preselección en el modo de velocidad
Rampa de
velocidad
Velocity ramp Rampa de velocidad [% del valor base] � PNU 560
Tab. 5.17 Byte de control 4 – Tarea directa
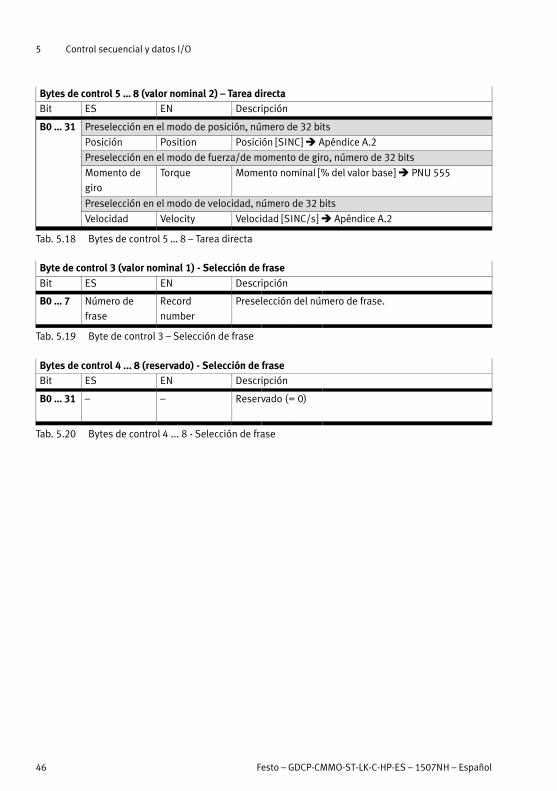
5 Control secuencial y datos I/O
46 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Bytes de control 5 … 8 (valor nominal 2) – Tarea directaBit ES EN Descripción
B0 … 31 Preselección en el modo de posición, número de 32 bits
Posición Position Posición [SINC] � Apéndice A.2
Preselección en el modo de fuerza/de momento de giro, número de 32 bits
Momento de
giro
Torque Momento nominal [% del valor base] � PNU 555
Preselección en el modo de velocidad, número de 32 bits
Velocidad Velocity Velocidad [SINC/s] � Apéndice A.2
Tab. 5.18 Bytes de control 5 … 8 – Tarea directa
Byte de control 3 (valor nominal 1) - Selección de frase
Bit ES EN Descripción
B0 … 7 Número de
frase
Record
number
Preselección del número de frase.
Tab. 5.19 Byte de control 3 – Selección de frase
Bytes de control 4 ... 8 (reservado) - Selección de fraseBit ES EN Descripción
B0 … 31 – – Reservado (= 0)
Tab. 5.20 Bytes de control 4 ... 8 - Selección de frase
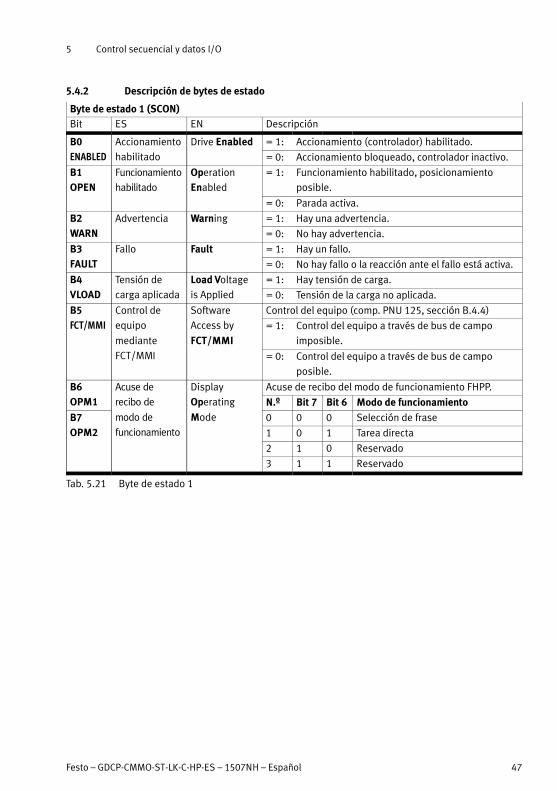
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 47
5.4.2 Descripción de bytes de estado
Byte de estado 1 (SCON)Bit ES EN Descripción
B0ENABLED
Accionamiento
habilitado
Drive Enabled = 1: Accionamiento (controlador) habilitado.
= 0: Accionamiento bloqueado, controlador inactivo.
B1OPEN
Funcionamiento
habilitado
Operation
Enabled
= 1: Funcionamiento habilitado, posicionamiento
posible.
= 0: Parada activa.
B2WARN
Advertencia Warning = 1: Hay una advertencia.
= 0: No hay advertencia.
B3FAULT
Fallo Fault = 1: Hay un fallo.
= 0: No hay fallo o la reacción ante el fallo está activa.
B4VLOAD
Tensión de
carga aplicada
Load Voltage
is Applied
= 1: Hay tensión de carga.
= 0: Tensión de la carga no aplicada.
B5FCT/MMI
Control de
equipo
mediante
FCT/MMI
Software
Access by
FCT/MMI
Control del equipo (comp. PNU 125, sección B.4.4)
= 1: Control del equipo a través de bus de campo
imposible.
= 0: Control del equipo a través de bus de campo
posible.
B6OPM1
Acuse de
recibo de
modo de
funcionamiento
Display
Operating
Mode
Acuse de recibo del modo de funcionamiento FHPP.
N.º Bit 7 Bit 6 Modo de funcionamiento
B7OPM2
0 0 0 Selección de frase
1 0 1 Tarea directa
2 1 0 Reservado
3 1 1 Reservado
Tab. 5.21 Byte de estado 1
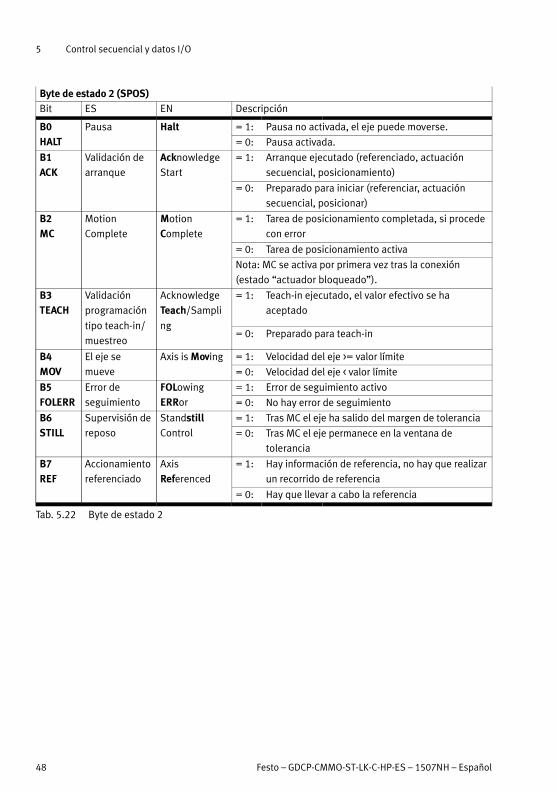
5 Control secuencial y datos I/O
48 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Byte de estado 2 (SPOS)Bit ES EN Descripción
B0HALT
Pausa Halt = 1: Pausa no activada, el eje puede moverse.
= 0: Pausa activada.
B1ACK
Validación de
arranque
Acknowledge
Start
= 1: Arranque ejecutado (referenciado, actuación
secuencial, posicionamiento)
= 0: Preparado para iniciar (referenciar, actuación
secuencial, posicionar)
B2MC
Motion
Complete
Motion
Complete
= 1: Tarea de posicionamiento completada, si procede
con error
= 0: Tarea de posicionamiento activa
Nota: MC se activa por primera vez tras la conexión
(estado “actuador bloqueado”).
B3TEACH
Validación
programación
tipo teach-in/
muestreo
Acknowledge
Teach/Sampli
ng
= 1: Teach-in ejecutado, el valor efectivo se ha
aceptado
= 0: Preparado para teach-in
B4MOV
El eje se
mueve
Axis is Moving = 1: Velocidad del eje >= valor límite
= 0: Velocidad del eje < valor límite
B5FOLERR
Error de
seguimiento
FOLowing
ERRor
= 1: Error de seguimiento activo
= 0: No hay error de seguimiento
B6STILL
Supervisión de
reposo
StandstillControl
= 1: Tras MC el eje ha salido del margen de tolerancia
= 0: Tras MC el eje permanece en la ventana de
tolerancia
B7REF
Accionamiento
referenciado
Axis
Referenced
= 1: Hay información de referencia, no hay que realizar
un recorrido de referencia
= 0: Hay que llevar a cabo la referencia
Tab. 5.22 Byte de estado 2
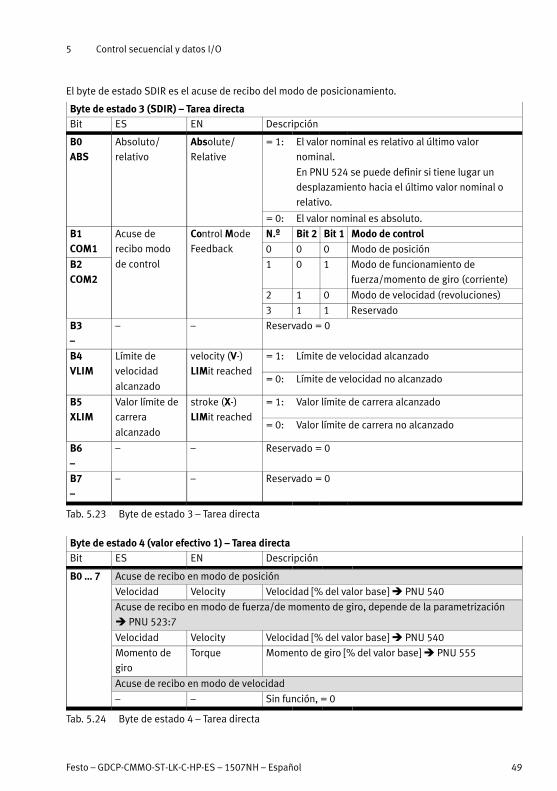
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 49
El byte de estado SDIR es el acuse de recibo del modo de posicionamiento.
Byte de estado 3 (SDIR) – Tarea directaBit ES EN Descripción
B0ABS
Absoluto/
relativo
Absolute/
Relative
= 1: El valor nominal es relativo al último valor
nominal.
En PNU 524 se puede definir si tiene lugar un
desplazamiento hacia el último valor nominal o
relativo.
= 0: El valor nominal es absoluto.
B1COM1
Acuse de
recibo modo
de control
Control Mode
Feedback
N.º Bit 2 Bit 1 Modo de control
0 0 0 Modo de posición
B2COM2
1 0 1 Modo de funcionamiento de
fuerza/momento de giro (corriente)
2 1 0 Modo de velocidad (revoluciones)
3 1 1 Reservado
B3–
– – Reservado = 0
B4VLIM
Límite de
velocidad
alcanzado
velocity (V-)
LIMit reached
= 1: Límite de velocidad alcanzado
= 0: Límite de velocidad no alcanzado
B5XLIM
Valor límite de
carrera
alcanzado
stroke (X-)
LIMit reached
= 1: Valor límite de carrera alcanzado
= 0: Valor límite de carrera no alcanzado
B6–
– – Reservado = 0
B7–
– – Reservado = 0
Tab. 5.23 Byte de estado 3 – Tarea directa
Byte de estado 4 (valor efectivo 1) – Tarea directaBit ES EN Descripción
B0 … 7 Acuse de recibo en modo de posición
Velocidad Velocity Velocidad [% del valor base] � PNU 540
Acuse de recibo en modo de fuerza/de momento de giro, depende de la parametrización
� PNU 523:7
Velocidad Velocity Velocidad [% del valor base] � PNU 540
Momento de
giro
Torque Momento de giro [% del valor base] � PNU 555
Acuse de recibo en modo de velocidad
– – Sin función, = 0
Tab. 5.24 Byte de estado 4 – Tarea directa
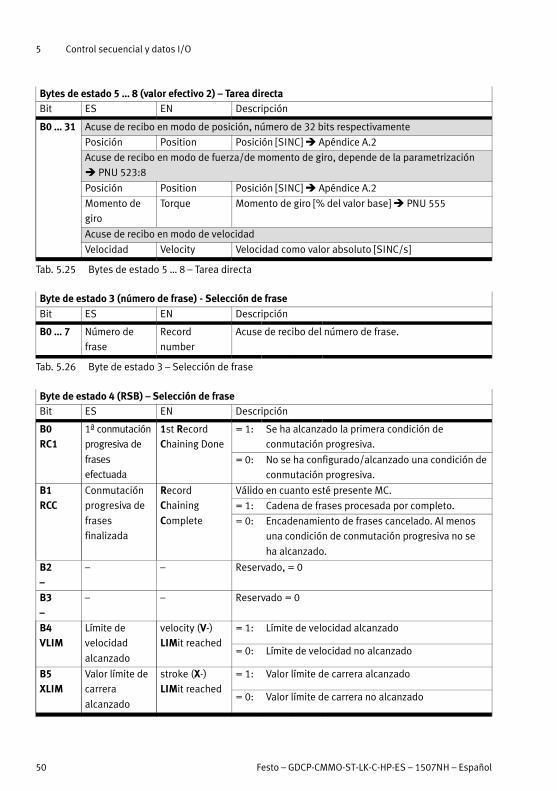
5 Control secuencial y datos I/O
50 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Bytes de estado 5 … 8 (valor efectivo 2) – Tarea directaBit ES EN Descripción
B0 … 31 Acuse de recibo en modo de posición, número de 32 bits respectivamente
Posición Position Posición [SINC] � Apéndice A.2
Acuse de recibo en modo de fuerza/de momento de giro, depende de la parametrización
� PNU 523:8
Posición Position Posición [SINC] � Apéndice A.2
Momento de
giro
Torque Momento de giro [% del valor base] � PNU 555
Acuse de recibo en modo de velocidad
Velocidad Velocity Velocidad como valor absoluto [SINC/s]
Tab. 5.25 Bytes de estado 5 … 8 – Tarea directa
Byte de estado 3 (número de frase) - Selección de frase
Bit ES EN Descripción
B0 … 7 Número de
frase
Record
number
Acuse de recibo del número de frase.
Tab. 5.26 Byte de estado 3 – Selección de frase
Byte de estado 4 (RSB) – Selección de fraseBit ES EN Descripción
B0RC1
1ª conmutación
progresiva de
frases
efectuada
1st Record
Chaining Done
= 1: Se ha alcanzado la primera condición de
conmutación progresiva.
= 0: No se ha configurado/alcanzado una condición de
conmutación progresiva.
B1RCC
Conmutación
progresiva de
frases
finalizada
Record
Chaining
Complete
Válido en cuanto esté presente MC.
= 1: Cadena de frases procesada por completo.
= 0: Encadenamiento de frases cancelado. Al menos
una condición de conmutación progresiva no se
ha alcanzado.
B2–
– – Reservado, = 0
B3–
– – Reservado = 0
B4VLIM
Límite de
velocidad
alcanzado
velocity (V-)
LIMit reached
= 1: Límite de velocidad alcanzado
= 0: Límite de velocidad no alcanzado
B5XLIM
Valor límite de
carrera
alcanzado
stroke (X-)
LIMit reached
= 1: Valor límite de carrera alcanzado
= 0: Valor límite de carrera no alcanzado
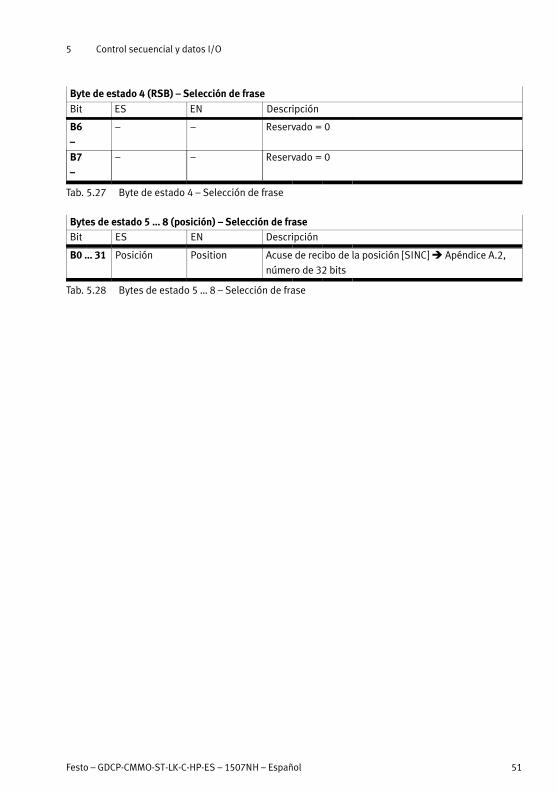
5 Control secuencial y datos I/O
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 51
Byte de estado 4 (RSB) – Selección de frase
Bit DescripciónENES
B6–
– – Reservado = 0
B7–
– – Reservado = 0
Tab. 5.27 Byte de estado 4 – Selección de frase
Bytes de estado 5 … 8 (posición) – Selección de fraseBit ES EN Descripción
B0 … 31 Posición Position Acuse de recibo de la posición [SINC] � Apéndice A.2,
número de 32 bits
Tab. 5.28 Bytes de estado 5 … 8 – Selección de frase
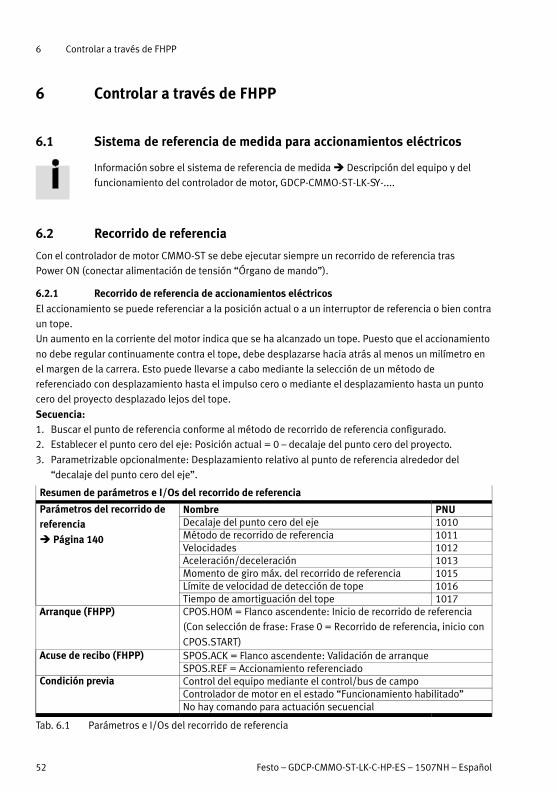
6 Controlar a través de FHPP
52 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
6 Controlar a través de FHPP
6.1 Sistema de referencia de medida para accionamientos eléctricos
Información sobre el sistema de referencia de medida � Descripción del equipo y del
funcionamiento del controlador de motor, GDCP-CMMO-ST-LK-SY-....
6.2 Recorrido de referencia
Con el controlador de motor CMMO-ST se debe ejecutar siempre un recorrido de referencia tras
Power ON (conectar alimentación de tensión “Órgano de mando”).
6.2.1 Recorrido de referencia de accionamientos eléctricos
El accionamiento se puede referenciar a la posición actual o a un interruptor de referencia o bien contra
un tope.
Un aumento en la corriente del motor indica que se ha alcanzado un tope. Puesto que el accionamiento
no debe regular continuamente contra el tope, debe desplazarse hacia atrás al menos un milímetro en
el margen de la carrera. Esto puede llevarse a cabo mediante la selección de un método de
referenciado con desplazamiento hasta el impulso cero o mediante el desplazamiento hasta un punto
cero del proyecto desplazado lejos del tope.
Secuencia:1. Buscar el punto de referencia conforme al método de recorrido de referencia configurado.
2. Establecer el punto cero del eje: Posición actual = 0 – decalaje del punto cero del proyecto.
3. Parametrizable opcionalmente: Desplazamiento relativo al punto de referencia alrededor del
“decalaje del punto cero del eje”.
Resumen de parámetros e I/Os del recorrido de referencia
Parámetros del recorrido dereferencia
� Página 140
Nombre PNUDecalaje del punto cero del eje 1010Método de recorrido de referencia 1011Velocidades 1012Aceleración/deceleración 1013Momento de giro máx. del recorrido de referencia 1015Límite de velocidad de detección de tope 1016Tiempo de amortiguación del tope 1017
Arranque (FHPP) CPOS.HOM = Flanco ascendente: Inicio de recorrido de referencia
(Con selección de frase: Frase 0 = Recorrido de referencia, inicio con
CPOS.START)Acuse de recibo (FHPP) SPOS.ACK = Flanco ascendente: Validación de arranque
SPOS.REF = Accionamiento referenciadoCondición previa Control del equipo mediante el control/bus de campo
Controlador de motor en el estado “Funcionamiento habilitado”No hay comando para actuación secuencial
Tab. 6.1 Parámetros e I/Os del recorrido de referencia
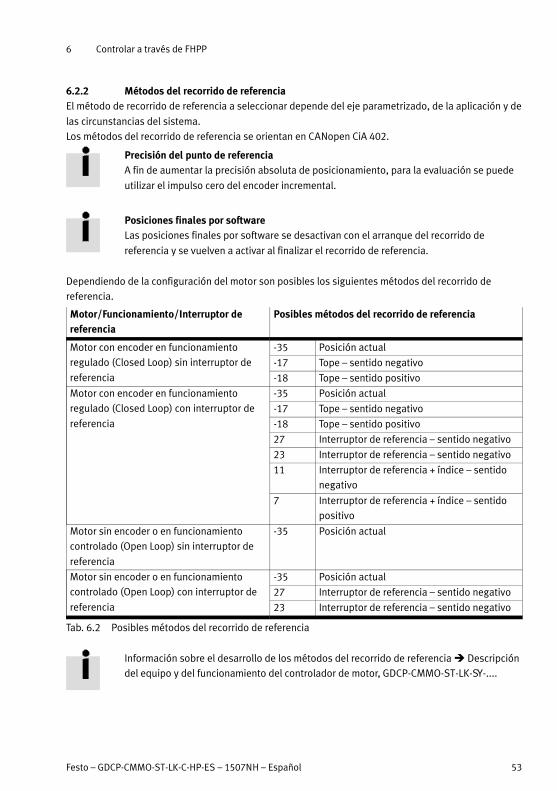
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 53
6.2.2 Métodos del recorrido de referenciaEl método de recorrido de referencia a seleccionar depende del eje parametrizado, de la aplicación y de
las circunstancias del sistema.
Los métodos del recorrido de referencia se orientan en CANopen CiA 402.
Precisión del punto de referenciaA fin de aumentar la precisión absoluta de posicionamiento, para la evaluación se puede
utilizar el impulso cero del encoder incremental.
Posiciones finales por softwareLas posiciones finales por software se desactivan con el arranque del recorrido de
referencia y se vuelven a activar al finalizar el recorrido de referencia.
Dependiendo de la configuración del motor son posibles los siguientes métodos del recorrido de
referencia.
Motor/Funcionamiento/Interruptor dereferencia
Posibles métodos del recorrido de referencia
Motor con encoder en funcionamiento
regulado (Closed Loop) sin interruptor de
referencia
-35 Posición actual
-17 Tope – sentido negativo
-18 Tope – sentido positivo
Motor con encoder en funcionamiento
regulado (Closed Loop) con interruptor de
referencia
-35 Posición actual
-17 Tope – sentido negativo
-18 Tope – sentido positivo
27 Interruptor de referencia – sentido negativo
23 Interruptor de referencia – sentido negativo
11 Interruptor de referencia + índice – sentido
negativo
7 Interruptor de referencia + índice – sentido
positivo
Motor sin encoder o en funcionamiento
controlado (Open Loop) sin interruptor de
referencia
-35 Posición actual
Motor sin encoder o en funcionamiento
controlado (Open Loop) con interruptor de
referencia
-35 Posición actual
27 Interruptor de referencia – sentido negativo
23 Interruptor de referencia – sentido negativo
Tab. 6.2 Posibles métodos del recorrido de referencia
Información sobre el desarrollo de los métodos del recorrido de referencia � Descripción
del equipo y del funcionamiento del controlador de motor, GDCP-CMMO-ST-LK-SY-....
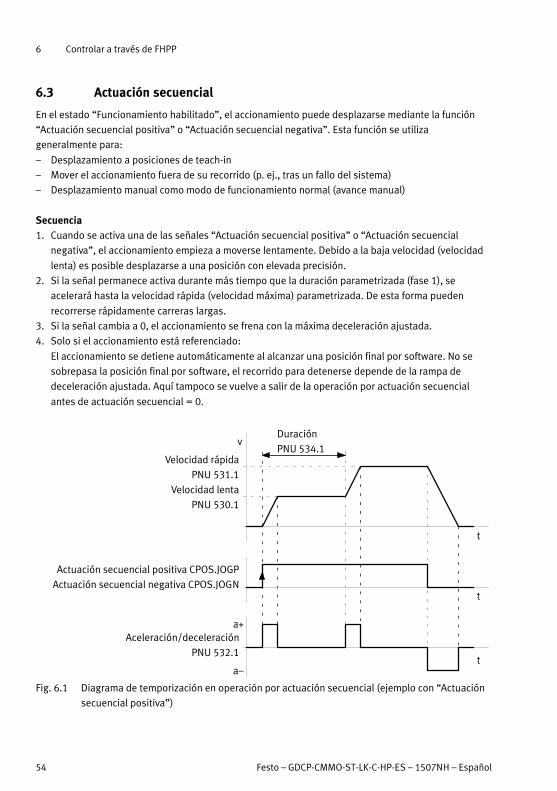
6 Controlar a través de FHPP
54 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
6.3 Actuación secuencial
En el estado “Funcionamiento habilitado”, el accionamiento puede desplazarse mediante la función
“Actuación secuencial positiva” o “Actuación secuencial negativa”. Esta función se utiliza
generalmente para:
– Desplazamiento a posiciones de teach-in
– Mover el accionamiento fuera de su recorrido (p. ej., tras un fallo del sistema)
– Desplazamiento manual como modo de funcionamiento normal (avance manual)
Secuencia1. Cuando se activa una de las señales “Actuación secuencial positiva” o “Actuación secuencial
negativa”, el accionamiento empieza a moverse lentamente. Debido a la baja velocidad (velocidad
lenta) es posible desplazarse a una posición con elevada precisión.
2. Si la señal permanece activa durante más tiempo que la duración parametrizada (fase 1), se
acelerará hasta la velocidad rápida (velocidad máxima) parametrizada. De esta forma pueden
recorrerse rápidamente carreras largas.
3. Si la señal cambia a 0, el accionamiento se frena con la máxima deceleración ajustada.
4. Solo si el accionamiento está referenciado:
El accionamiento se detiene automáticamente al alcanzar una posición final por software. No se
sobrepasa la posición final por software, el recorrido para detenerse depende de la rampa de
deceleración ajustada. Aquí tampoco se vuelve a salir de la operación por actuación secuencial
antes de actuación secuencial = 0.
t
Actuación secuencial positiva CPOS.JOGP
Actuación secuencial negativa CPOS.JOGN
vDuración
PNU 534.1Velocidad rápida
PNU 531.1
a+
a–
t
Velocidad lenta
PNU 530.1
t
Aceleración/deceleración
PNU 532.1
Fig. 6.1 Diagrama de temporización en operación por actuación secuencial (ejemplo con “Actuación
secuencial positiva”)
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 55
Resumen de parámetros e I/Os de la operación por actuación secuencial
Parámetros involucrados� Sección B.4.10
Nombre del parámetro PNU
Velocidad lenta – fase 1 530
Velocidad máxima – fase 2 531
Aceleración/deceleración 532
Duración de la marcha lenta fase 1 534
Ventana de mensaje de error de seguimiento
(operación por actuación secuencial)
538
Retardo de respuesta error de seguimiento 539
Arranque (FHPP) CPOS.JOGP = Flanco ascendente: Actuación secuencial positiva
(valores efectivos mayores)
CPOS.JOGN = Flanco ascendente: Actuación secuencial negativa
(valores efectivos menores)
Acuse de recibo (FHPP) SPOS.MOV = 1: El accionamiento se mueve
SPOS.MC = 0: (Motion Complete)
Condición previa Control del equipo mediante el control/bus de campo
Controlador de motor en el estado “Funcionamiento habilitado”
Tab. 6.3 Parámetros e I/Os de la operación por actuación secuencial
6.4 Programación tipo teach-in a través del bus de campo
Mediante el bus de campo se pueden programar por teach-in valores de posición absolutos. Los
valores de posición programados previamente se sobrescriben. La programación tipo teach-n de frases
de posición relativas, frases de velocidad o frases de fuerza no es posible y causa la advertencia 0x40
“Última programación teach-in no exitosa”.
Nota: El accionamiento no debe estar parado para la programación teach-in. No obstante, incluso a
velocidades mínimas son posibles imprecisiones de varios milímetros, condicionadas por los tiempos
de ciclo habituales del controlador de motor, la transmisión de datos y la unidad de control de nivel
superior. La velocidad de la programación tipo teach-in debe ajustarse de modo que la posición se
detecte con suficiente precisión.
Secuencia
1. El accionamiento se desplaza a la posición deseada manualmente o mediante la operación por
actuación secuencial. Esto puede realizarse en la operación por actuación secuencial mediante el
posicionamiento (o el desplazamiento manual en el estado “Actuador bloqueado” en caso de
motores con encoder).
2. Parametrizar destino de teach-in deseado. Con “Posición nominal en frase de posicionamiento” y
los comparadores de posición, definir el número de frase en PNU 400 (modo directo) o en el byte de
control 3 (selección de frase).
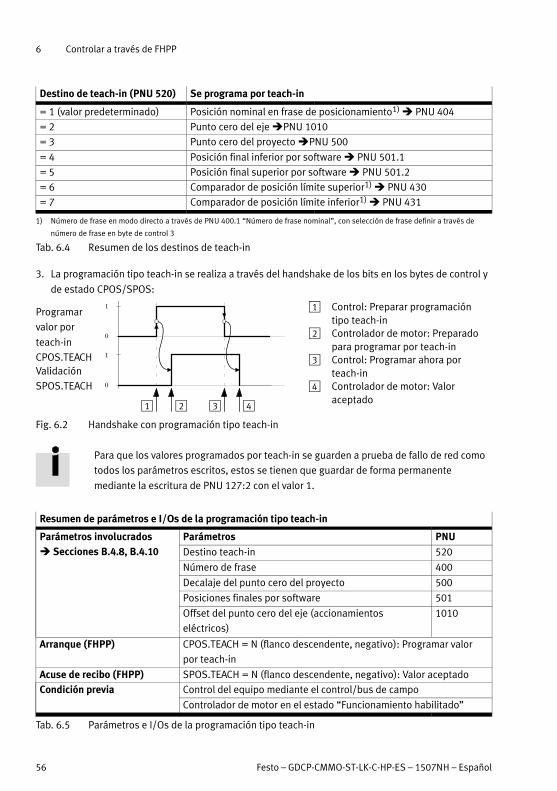
6 Controlar a través de FHPP
56 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Destino de teach-in (PNU 520) Se programa por teach-in
= 1 (valor predeterminado) Posición nominal en frase de posicionamiento1) � PNU 404
= 2 Punto cero del eje �PNU 1010
= 3 Punto cero del proyecto �PNU 500
= 4 Posición final inferior por software � PNU 501.1
= 5 Posición final superior por software � PNU 501.2
= 6 Comparador de posición límite superior1) � PNU 430
= 7 Comparador de posición límite inferior1) � PNU 431
1) Número de frase en modo directo a través de PNU 400.1 “Número de frase nominal”, con selección de frase definir a través de
número de frase en byte de control 3
Tab. 6.4 Resumen de los destinos de teach-in
3. La programación tipo teach-in se realiza a través del handshake de los bits en los bytes de control y
de estado CPOS/SPOS:
1 2 3 4
1
0
Validación
SPOS.TEACH
Programar
valor por
teach-in
CPOS.TEACH 1
0
1 Control: Preparar programacióntipo teach-in
2 Controlador de motor: Preparadopara programar por teach-in
3 Control: Programar ahora porteach-in
4 Controlador de motor: Valoraceptado
Fig. 6.2 Handshake con programación tipo teach-in
Para que los valores programados por teach-in se guarden a prueba de fallo de red como
todos los parámetros escritos, estos se tienen que guardar de forma permanente
mediante la escritura de PNU 127:2 con el valor 1.
Resumen de parámetros e I/Os de la programación tipo teach-in
Parámetros involucrados� Secciones B.4.8, B.4.10
Parámetros PNU
Destino teach-in 520
Número de frase 400
Decalaje del punto cero del proyecto 500
Posiciones finales por software 501
Offset del punto cero del eje (accionamientos
eléctricos)
1010
Arranque (FHPP) CPOS.TEACH = N (flanco descendente, negativo): Programar valor
por teach-in
Acuse de recibo (FHPP) SPOS.TEACH = N (flanco descendente, negativo): Valor aceptado
Condición previa Control del equipo mediante el control/bus de campo
Controlador de motor en el estado “Funcionamiento habilitado”
Tab. 6.5 Parámetros e I/Os de la programación tipo teach-in
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 57
6.5 Ejecución de frase
En el estado “Funcionamiento habilitado” puede iniciarse una frase. Esta función se utiliza
generalmente para:
– moverse a cualquier posición de la lista de frases mediante el control
– moverse con cualquier velocidad y fuerza de la lista de frases mediante el control
– procesar un perfil de posicionamiento mediante encadenamiento de frases
– posiciones de destino conocidas que raramente cambian (cambio de formulación)
Secuencia1. Ajustar el número de frase deseado en los datos de salida del control. Hasta el arranque, el
controlador de motor responde con el número de la última frase ejecutada.
2. Con un flanco ascendente en CPOS.START, el controlador acepta el número de frase e inicia la tarea
de posicionamiento.
3. El controlador de motor señaliza ahora con el flanco ascendente en SPOS.ACK que los datos de
salida del control se han aceptado y que la tarea de posicionamiento está activa. La tarea de
posicionamiento se sigue ejecutando, incluso si se vuele a restablecer CPOS.START a cero.
4. Cuando la frase ha finalizado, se activa SPOS.MC.
Causas de errores en la aplicación:– No se ha ejecutado ningún referenciado.
– No se ha alcanzado la posición de destino.
– El número de frase no es válido.
– La frase no se ha inicializado.
En caso de un encadenamiento de frases � Sección 6.5.3:
Si en el movimiento se ha especificado una nueva velocidad y/o una nueva posición de
destino, entonces todavía debería bastar el recorrido remanente hasta la posición de
destino para llegar al objetivo con la rampa de frenado ajustada.
Cuando este objetivo no se puede alcanzar con la velocidad, aceleración o deceleración
parametrizadas se emite el mensaje de fallo 0x25 (cálculo de la trayectoria).
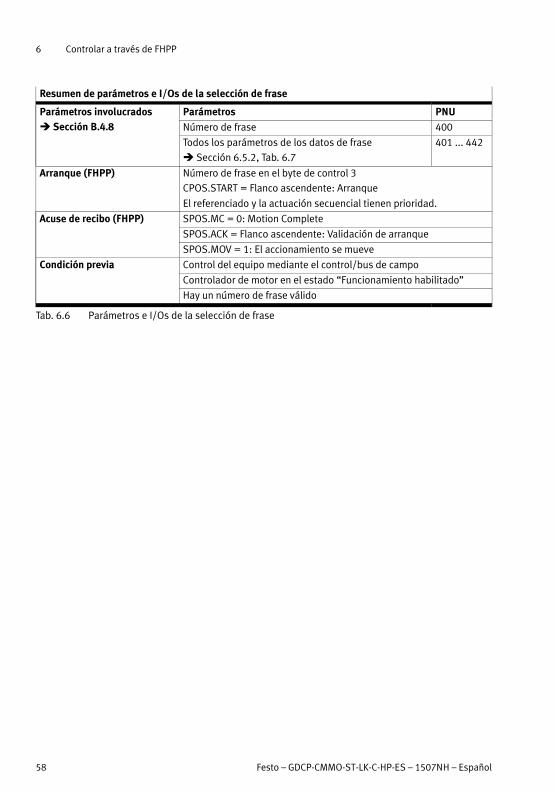
6 Controlar a través de FHPP
58 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Resumen de parámetros e I/Os de la selección de frase
Parámetros involucrados� Sección B.4.8
Parámetros PNU
Número de frase 400
Todos los parámetros de los datos de frase
� Sección 6.5.2, Tab. 6.7
401 ... 442
Arranque (FHPP) Número de frase en el byte de control 3
CPOS.START = Flanco ascendente: Arranque
El referenciado y la actuación secuencial tienen prioridad.
Acuse de recibo (FHPP) SPOS.MC = 0: Motion Complete
SPOS.ACK = Flanco ascendente: Validación de arranque
SPOS.MOV = 1: El accionamiento se mueve
Condición previa Control del equipo mediante el control/bus de campo
Controlador de motor en el estado “Funcionamiento habilitado”
Hay un número de frase válido
Tab. 6.6 Parámetros e I/Os de la selección de frase
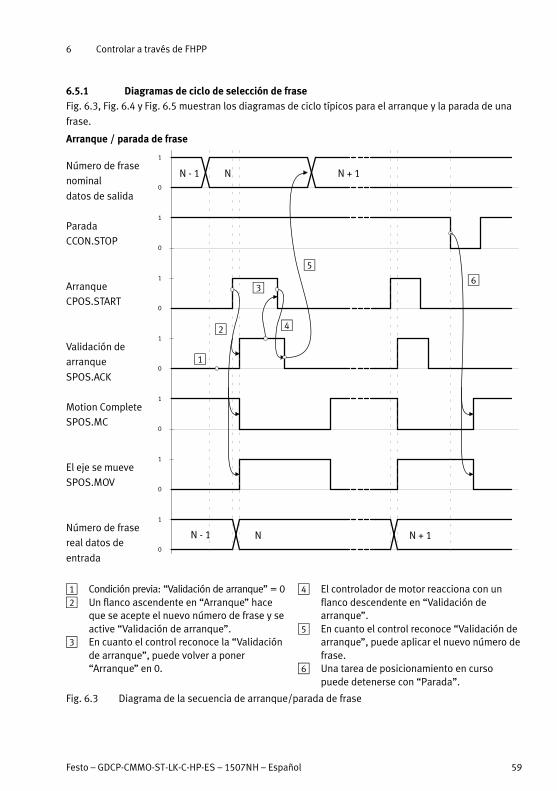
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 59
6.5.1 Diagramas de ciclo de selección de fraseFig. 6.3, Fig. 6.4 y Fig. 6.5 muestran los diagramas de ciclo típicos para el arranque y la parada de una
frase.
Arranque / parada de frase
Número de frase
nominal
datos de salida
Parada
CCON.STOP
Validación de
arranque
SPOS.ACK
Motion Complete
SPOS.MC
Número de frase
real datos de
entrada
N - 1 N N + 1
N - 1 N
1
0
1
0
1
0
1
0
1
0
1
0
1
0
El eje se mueve
SPOS.MOV
Arranque
CPOS.START
N + 1
5
4
3
2
1
6
1 Condición previa: “Validación de arranque” = 02 Un flanco ascendente en “Arranque” hace
que se acepte el nuevo número de frase y seactive “Validación de arranque”.
3 En cuanto el control reconoce la “Validaciónde arranque”, puede volver a poner“Arranque” en 0.
4 El controlador de motor reacciona con unflanco descendente en “Validación dearranque”.
5 En cuanto el control reconoce “Validación dearranque”, puede aplicar el nuevo número defrase.
6 Una tarea de posicionamiento en cursopuede detenerse con “Parada”.
Fig. 6.3 Diagrama de la secuencia de arranque/parada de frase
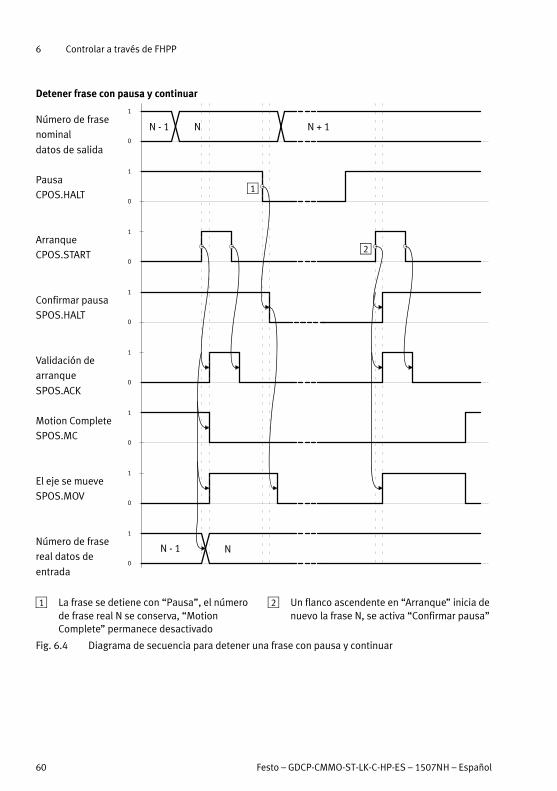
6 Controlar a través de FHPP
60 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Detener frase con pausa y continuar
Número de frase
nominal
datos de salida
Validación de
arranque
SPOS.ACK
Motion Complete
SPOS.MC
Número de frase
real datos de
entrada
N - 1 N N + 1
N - 1 N
1
0
1
0
1
0
1
0
1
0
1
0
El eje se mueve
SPOS.MOV
Pausa
CPOS.HALT
1
0
Arranque
CPOS.START
1
0
Confirmar pausa
SPOS.HALT
1
2
1 La frase se detiene con “Pausa”, el númerode frase real N se conserva, “MotionComplete” permanece desactivado
2 Un flanco ascendente en “Arranque” inicia denuevo la frase N, se activa “Confirmar pausa”
Fig. 6.4 Diagrama de secuencia para detener una frase con pausa y continuar
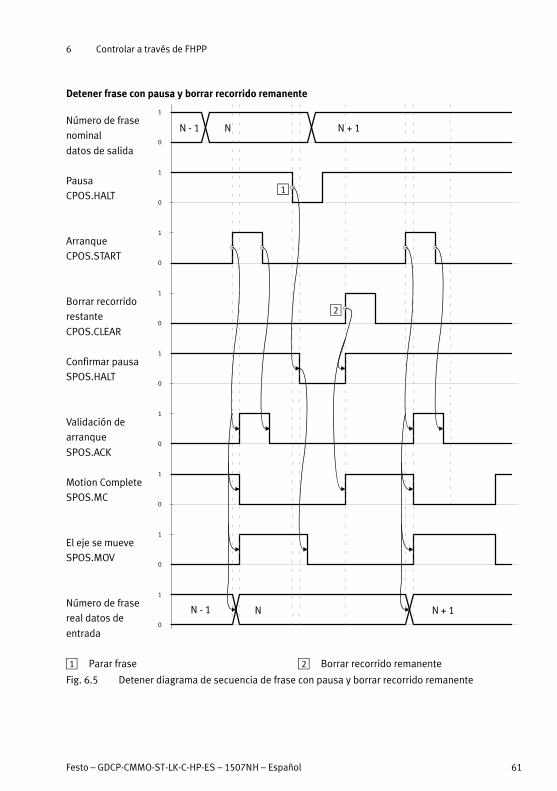
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 61
Detener frase con pausa y borrar recorrido remanente
1
2
Número de frase
nominal
datos de salida
Validación de
arranque
SPOS.ACK
Motion Complete
SPOS.MC
Número de frase
real datos de
entrada
N - 1 N N + 1
N - 1 N
1
0
1
0
1
0
1
0
1
0
1
0
El eje se mueve
SPOS.MOV
Pausa
CPOS.HALT
N + 1
1
0
Arranque
CPOS.START
Borrar recorrido
restante
CPOS.CLEAR
1
0
1
0
Confirmar pausa
SPOS.HALT
1 Parar frase 2 Borrar recorrido remanente
Fig. 6.5 Detener diagrama de secuencia de frase con pausa y borrar recorrido remanente
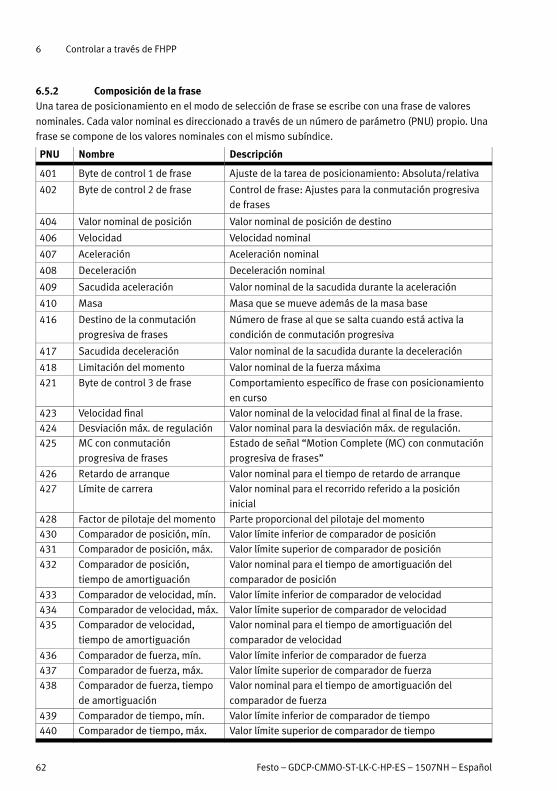
6 Controlar a través de FHPP
62 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
6.5.2 Composición de la fraseUna tarea de posicionamiento en el modo de selección de frase se escribe con una frase de valores
nominales. Cada valor nominal es direccionado a través de un número de parámetro (PNU) propio. Una
frase se compone de los valores nominales con el mismo subíndice.
PNU Nombre Descripción
401 Byte de control 1 de frase Ajuste de la tarea de posicionamiento: Absoluta/relativa
402 Byte de control 2 de frase Control de frase: Ajustes para la conmutación progresiva
de frases
404 Valor nominal de posición Valor nominal de posición de destino
406 Velocidad Velocidad nominal
407 Aceleración Aceleración nominal
408 Deceleración Deceleración nominal
409 Sacudida aceleración Valor nominal de la sacudida durante la aceleración
410 Masa Masa que se mueve además de la masa base
416 Destino de la conmutación
progresiva de frases
Número de frase al que se salta cuando está activa la
condición de conmutación progresiva
417 Sacudida deceleración Valor nominal de la sacudida durante la deceleración
418 Limitación del momento Valor nominal de la fuerza máxima
421 Byte de control 3 de frase Comportamiento específico de frase con posicionamiento
en curso
423 Velocidad final Valor nominal de la velocidad final al final de la frase.
424 Desviación máx. de regulación Valor nominal para la desviación máx. de regulación.
425 MC con conmutación
progresiva de frases
Estado de señal “Motion Complete (MC) con conmutación
progresiva de frases”
426 Retardo de arranque Valor nominal para el tiempo de retardo de arranque
427 Límite de carrera Valor nominal para el recorrido referido a la posición
inicial
428 Factor de pilotaje del momento Parte proporcional del pilotaje del momento
430 Comparador de posición, mín. Valor límite inferior de comparador de posición
431 Comparador de posición, máx. Valor límite superior de comparador de posición
432 Comparador de posición,
tiempo de amortiguación
Valor nominal para el tiempo de amortiguación del
comparador de posición
433 Comparador de velocidad, mín. Valor límite inferior de comparador de velocidad
434 Comparador de velocidad, máx. Valor límite superior de comparador de velocidad
435 Comparador de velocidad,
tiempo de amortiguación
Valor nominal para el tiempo de amortiguación del
comparador de velocidad
436 Comparador de fuerza, mín. Valor límite inferior de comparador de fuerza
437 Comparador de fuerza, máx. Valor límite superior de comparador de fuerza
438 Comparador de fuerza, tiempo
de amortiguación
Valor nominal para el tiempo de amortiguación del
comparador de fuerza
439 Comparador de tiempo, mín. Valor límite inferior de comparador de tiempo
440 Comparador de tiempo, máx. Valor límite superior de comparador de tiempo
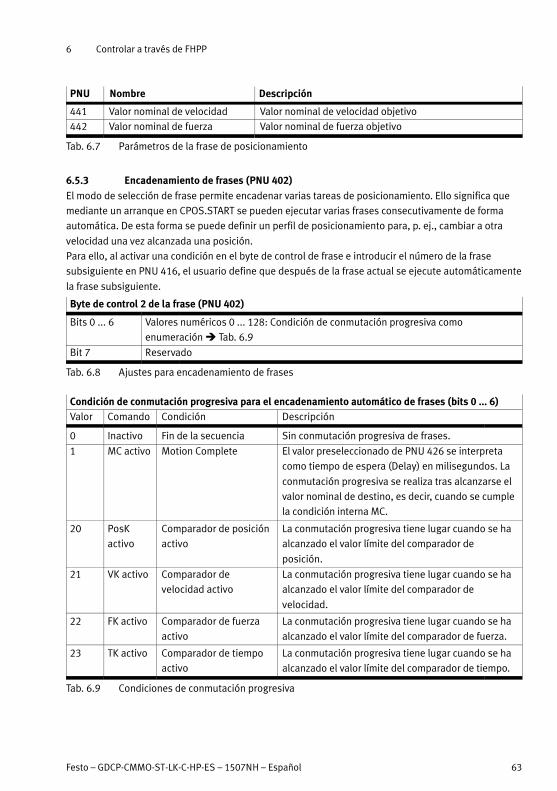
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 63
PNU DescripciónNombre
441 Valor nominal de velocidad Valor nominal de velocidad objetivo
442 Valor nominal de fuerza Valor nominal de fuerza objetivo
Tab. 6.7 Parámetros de la frase de posicionamiento
6.5.3 Encadenamiento de frases (PNU 402)
El modo de selección de frase permite encadenar varias tareas de posicionamiento. Ello significa que
mediante un arranque en CPOS.START se pueden ejecutar varias frases consecutivamente de forma
automática. De esta forma se puede definir un perfil de posicionamiento para, p. ej., cambiar a otra
velocidad una vez alcanzada una posición.
Para ello, al activar una condición en el byte de control de frase e introducir el número de la frase
subsiguiente en PNU 416, el usuario define que después de la frase actual se ejecute automáticamente
la frase subsiguiente.
Byte de control 2 de la frase (PNU 402)
Bits 0 ... 6 Valores numéricos 0 ... 128: Condición de conmutación progresiva como
enumeración � Tab. 6.9
Bit 7 Reservado
Tab. 6.8 Ajustes para encadenamiento de frases
Condición de conmutación progresiva para el encadenamiento automático de frases (bits 0 ... 6)Valor Comando Condición Descripción
0 Inactivo Fin de la secuencia Sin conmutación progresiva de frases.
1 MC activo Motion Complete El valor preseleccionado de PNU 426 se interpreta
como tiempo de espera (Delay) en milisegundos. La
conmutación progresiva se realiza tras alcanzarse el
valor nominal de destino, es decir, cuando se cumple
la condición interna MC.
20 PosK
activo
Comparador de posición
activo
La conmutación progresiva tiene lugar cuando se ha
alcanzado el valor límite del comparador de
posición.
21 VK activo Comparador de
velocidad activo
La conmutación progresiva tiene lugar cuando se ha
alcanzado el valor límite del comparador de
velocidad.
22 FK activo Comparador de fuerza
activo
La conmutación progresiva tiene lugar cuando se ha
alcanzado el valor límite del comparador de fuerza.
23 TK activo Comparador de tiempo
activo
La conmutación progresiva tiene lugar cuando se ha
alcanzado el valor límite del comparador de tiempo.
Tab. 6.9 Condiciones de conmutación progresiva
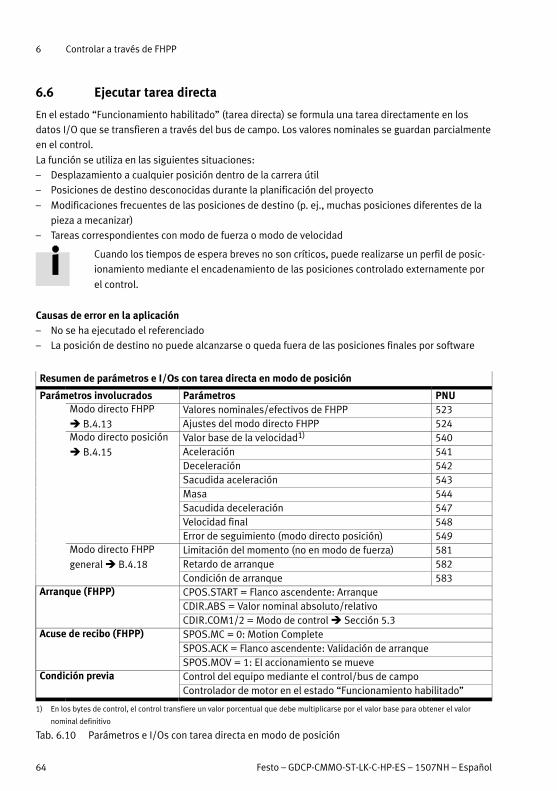
6 Controlar a través de FHPP
64 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
6.6 Ejecutar tarea directa
En el estado “Funcionamiento habilitado” (tarea directa) se formula una tarea directamente en los
datos I/O que se transfieren a través del bus de campo. Los valores nominales se guardan parcialmente
en el control.
La función se utiliza en las siguientes situaciones:
– Desplazamiento a cualquier posición dentro de la carrera útil
– Posiciones de destino desconocidas durante la planificación del proyecto
– Modificaciones frecuentes de las posiciones de destino (p. ej., muchas posiciones diferentes de la
pieza a mecanizar)
– Tareas correspondientes con modo de fuerza o modo de velocidad
Cuando los tiempos de espera breves no son críticos, puede realizarse un perfil de posic
ionamiento mediante el encadenamiento de las posiciones controlado externamente por
el control.
Causas de error en la aplicación– No se ha ejecutado el referenciado
– La posición de destino no puede alcanzarse o queda fuera de las posiciones finales por software
Resumen de parámetros e I/Os con tarea directa en modo de posición
Parámetros involucrados Parámetros PNUModo directo FHPP
� B.4.13Valores nominales/efectivos de FHPP 523Ajustes del modo directo FHPP 524
Modo directo posición
� B.4.15Valor base de la velocidad1) 540Aceleración 541Deceleración 542Sacudida aceleración 543Masa 544Sacudida deceleración 547Velocidad final 548Error de seguimiento (modo directo posición) 549
Modo directo FHPP
general � B.4.18Limitación del momento (no en modo de fuerza) 581Retardo de arranque 582Condición de arranque 583
Arranque (FHPP) CPOS.START = Flanco ascendente: ArranqueCDIR.ABS = Valor nominal absoluto/relativoCDIR.COM1/2 = Modo de control � Sección 5.3
Acuse de recibo (FHPP) SPOS.MC = 0: Motion CompleteSPOS.ACK = Flanco ascendente: Validación de arranqueSPOS.MOV = 1: El accionamiento se mueve
Condición previa Control del equipo mediante el control/bus de campoControlador de motor en el estado “Funcionamiento habilitado”
1) En los bytes de control, el control transfiere un valor porcentual que debe multiplicarse por el valor base para obtener el valor
nominal definitivo
Tab. 6.10 Parámetros e I/Os con tarea directa en modo de posición
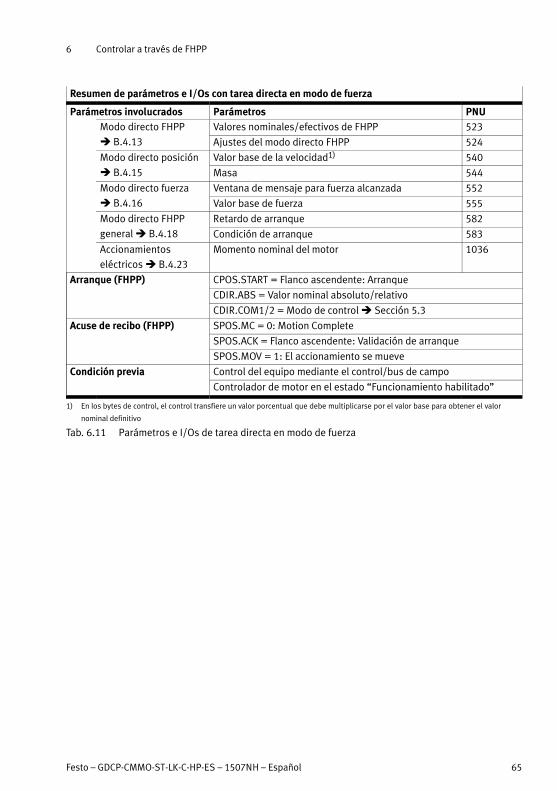
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 65
Resumen de parámetros e I/Os con tarea directa en modo de fuerza
Parámetros involucrados Parámetros PNUModo directo FHPP
� B.4.13
Valores nominales/efectivos de FHPP 523
Ajustes del modo directo FHPP 524
Modo directo posición
� B.4.15
Valor base de la velocidad1) 540
Masa 544
Modo directo fuerza
� B.4.16
Ventana de mensaje para fuerza alcanzada 552
Valor base de fuerza 555
Modo directo FHPP
general � B.4.18
Retardo de arranque 582
Condición de arranque 583
Accionamientos
eléctricos � B.4.23
Momento nominal del motor 1036
Arranque (FHPP) CPOS.START = Flanco ascendente: Arranque
CDIR.ABS = Valor nominal absoluto/relativo
CDIR.COM1/2 = Modo de control � Sección 5.3
Acuse de recibo (FHPP) SPOS.MC = 0: Motion Complete
SPOS.ACK = Flanco ascendente: Validación de arranque
SPOS.MOV = 1: El accionamiento se mueve
Condición previa Control del equipo mediante el control/bus de campo
Controlador de motor en el estado “Funcionamiento habilitado”
1) En los bytes de control, el control transfiere un valor porcentual que debe multiplicarse por el valor base para obtener el valor
nominal definitivo
Tab. 6.11 Parámetros e I/Os de tarea directa en modo de fuerza
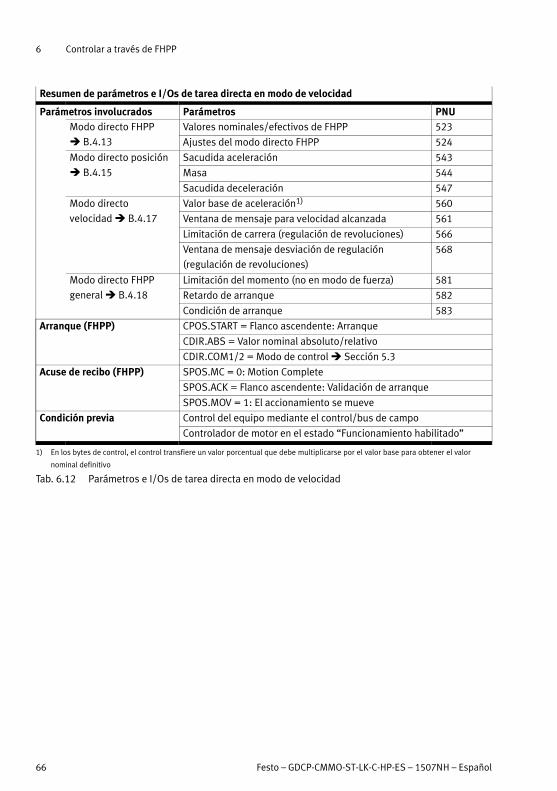
6 Controlar a través de FHPP
66 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Resumen de parámetros e I/Os de tarea directa en modo de velocidad
Parámetros involucrados Parámetros PNUModo directo FHPP
� B.4.13
Valores nominales/efectivos de FHPP 523
Ajustes del modo directo FHPP 524
Modo directo posición
� B.4.15
Sacudida aceleración 543
Masa 544
Sacudida deceleración 547
Modo directo
velocidad � B.4.17
Valor base de aceleración1) 560
Ventana de mensaje para velocidad alcanzada 561
Limitación de carrera (regulación de revoluciones) 566
Ventana de mensaje desviación de regulación
(regulación de revoluciones)
568
Modo directo FHPP
general � B.4.18
Limitación del momento (no en modo de fuerza) 581
Retardo de arranque 582
Condición de arranque 583
Arranque (FHPP) CPOS.START = Flanco ascendente: Arranque
CDIR.ABS = Valor nominal absoluto/relativo
CDIR.COM1/2 = Modo de control � Sección 5.3
Acuse de recibo (FHPP) SPOS.MC = 0: Motion Complete
SPOS.ACK = Flanco ascendente: Validación de arranque
SPOS.MOV = 1: El accionamiento se mueve
Condición previa Control del equipo mediante el control/bus de campo
Controlador de motor en el estado “Funcionamiento habilitado”
1) En los bytes de control, el control transfiere un valor porcentual que debe multiplicarse por el valor base para obtener el valor
nominal definitivo
Tab. 6.12 Parámetros e I/Os de tarea directa en modo de velocidad
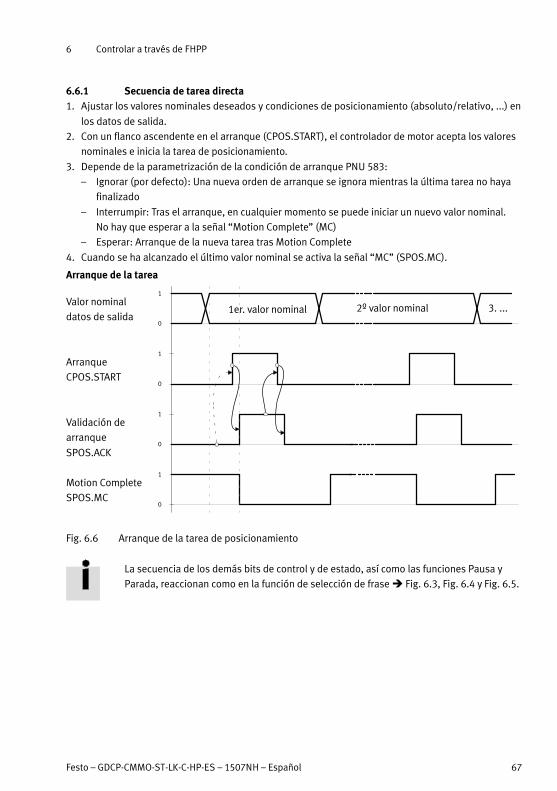
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 67
6.6.1 Secuencia de tarea directa1. Ajustar los valores nominales deseados y condiciones de posicionamiento (absoluto/relativo, ...) en
los datos de salida.
2. Con un flanco ascendente en el arranque (CPOS.START), el controlador de motor acepta los valores
nominales e inicia la tarea de posicionamiento.
3. Depende de la parametrización de la condición de arranque PNU 583:
– Ignorar (por defecto): Una nueva orden de arranque se ignora mientras la última tarea no haya
finalizado
– Interrumpir: Tras el arranque, en cualquier momento se puede iniciar un nuevo valor nominal.
No hay que esperar a la señal “Motion Complete” (MC)
– Esperar: Arranque de la nueva tarea tras Motion Complete
4. Cuando se ha alcanzado el último valor nominal se activa la señal “MC” (SPOS.MC).
Arranque de la tarea
Valor nominal
datos de salida
Arranque
CPOS.START
Validación de
arranque
SPOS.ACK
Motion Complete
SPOS.MC
1er. valor nominal 2º valor nominal
1
0
1
0
1
0
1
0
3. ...
Fig. 6.6 Arranque de la tarea de posicionamiento
La secuencia de los demás bits de control y de estado, así como las funciones Pausa y
Parada, reaccionan como en la función de selección de frase � Fig. 6.3, Fig. 6.4 y Fig. 6.5.
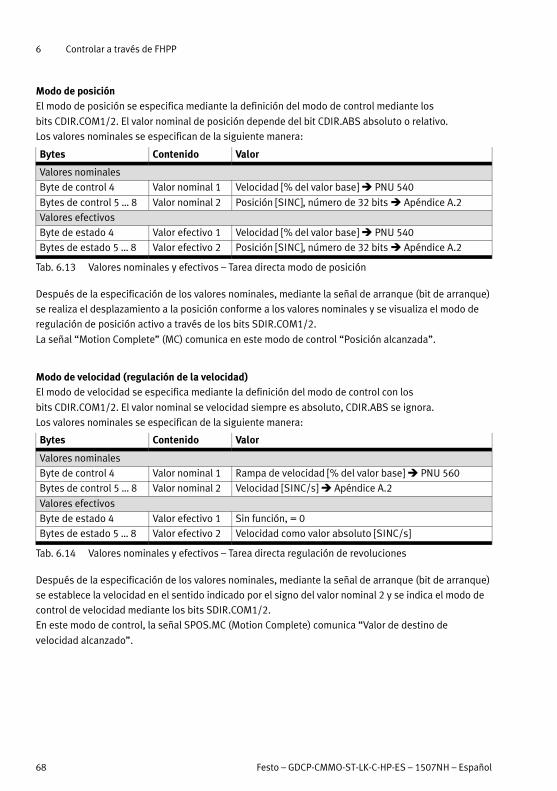
6 Controlar a través de FHPP
68 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Modo de posiciónEl modo de posición se especifica mediante la definición del modo de control mediante los
bits CDIR.COM1/2. El valor nominal de posición depende del bit CDIR.ABS absoluto o relativo.
Los valores nominales se especifican de la siguiente manera:
Bytes Contenido Valor
Valores nominales
Byte de control 4 Valor nominal 1 Velocidad [% del valor base] � PNU 540
Bytes de control 5 … 8 Valor nominal 2 Posición [SINC], número de 32 bits � Apéndice A.2
Valores efectivos
Byte de estado 4 Valor efectivo 1 Velocidad [% del valor base] � PNU 540
Bytes de estado 5 … 8 Valor efectivo 2 Posición [SINC], número de 32 bits � Apéndice A.2
Tab. 6.13 Valores nominales y efectivos – Tarea directa modo de posición
Después de la especificación de los valores nominales, mediante la señal de arranque (bit de arranque)
se realiza el desplazamiento a la posición conforme a los valores nominales y se visualiza el modo de
regulación de posición activo a través de los bits SDIR.COM1/2.
La señal “Motion Complete” (MC) comunica en este modo de control “Posición alcanzada”.
Modo de velocidad (regulación de la velocidad)El modo de velocidad se especifica mediante la definición del modo de control con los
bits CDIR.COM1/2. El valor nominal se velocidad siempre es absoluto, CDIR.ABS se ignora.
Los valores nominales se especifican de la siguiente manera:
Bytes Contenido Valor
Valores nominales
Byte de control 4 Valor nominal 1 Rampa de velocidad [% del valor base] � PNU 560
Bytes de control 5 … 8 Valor nominal 2 Velocidad [SINC/s] � Apéndice A.2
Valores efectivos
Byte de estado 4 Valor efectivo 1 Sin función, = 0
Bytes de estado 5 … 8 Valor efectivo 2 Velocidad como valor absoluto [SINC/s]
Tab. 6.14 Valores nominales y efectivos – Tarea directa regulación de revoluciones
Después de la especificación de los valores nominales, mediante la señal de arranque (bit de arranque)
se establece la velocidad en el sentido indicado por el signo del valor nominal 2 y se indica el modo de
control de velocidad mediante los bits SDIR.COM1/2.
En este modo de control, la señal SPOS.MC (Motion Complete) comunica “Valor de destino de
velocidad alcanzado”.
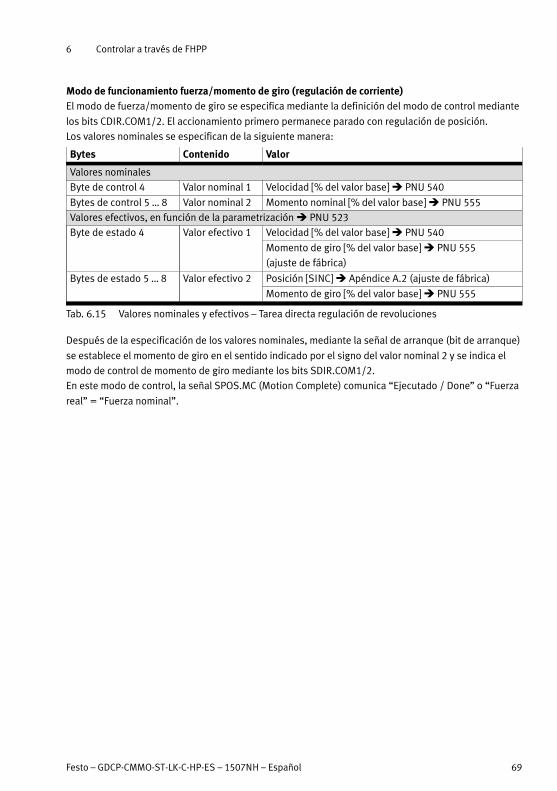
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 69
Modo de funcionamiento fuerza/momento de giro (regulación de corriente)El modo de fuerza/momento de giro se especifica mediante la definición del modo de control mediante
los bits CDIR.COM1/2. El accionamiento primero permanece parado con regulación de posición.
Los valores nominales se especifican de la siguiente manera:
Bytes Contenido Valor
Valores nominales
Byte de control 4 Valor nominal 1 Velocidad [% del valor base] � PNU 540
Bytes de control 5 … 8 Valor nominal 2 Momento nominal [% del valor base] � PNU 555
Valores efectivos, en función de la parametrización � PNU 523
Byte de estado 4 Valor efectivo 1 Velocidad [% del valor base] � PNU 540
Momento de giro [% del valor base] � PNU 555
(ajuste de fábrica)
Bytes de estado 5 … 8 Valor efectivo 2 Posición [SINC] � Apéndice A.2 (ajuste de fábrica)
Momento de giro [% del valor base] � PNU 555
Tab. 6.15 Valores nominales y efectivos – Tarea directa regulación de revoluciones
Después de la especificación de los valores nominales, mediante la señal de arranque (bit de arranque)
se establece el momento de giro en el sentido indicado por el signo del valor nominal 2 y se indica el
modo de control de momento de giro mediante los bits SDIR.COM1/2.
En este modo de control, la señal SPOS.MC (Motion Complete) comunica “Ejecutado / Done” o “Fuerza
real” = “Fuerza nominal”.
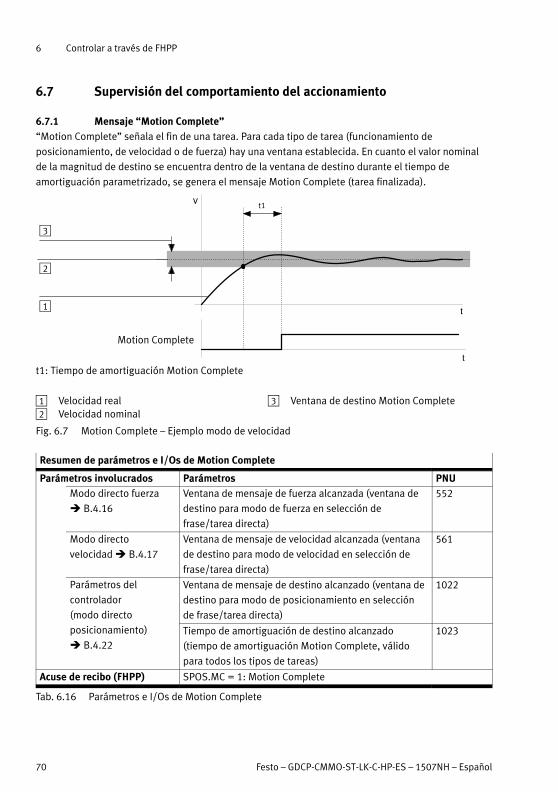
6 Controlar a través de FHPP
70 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
6.7 Supervisión del comportamiento del accionamiento
6.7.1 Mensaje “Motion Complete”“Motion Complete” señala el fin de una tarea. Para cada tipo de tarea (funcionamiento de
posicionamiento, de velocidad o de fuerza) hay una ventana establecida. En cuanto el valor nominal
de la magnitud de destino se encuentra dentro de la ventana de destino durante el tiempo de
amortiguación parametrizado, se genera el mensaje Motion Complete (tarea finalizada).
Motion Complete
t
t
vt1
1
2
3
t1: Tiempo de amortiguación Motion Complete
1 Velocidad real2 Velocidad nominal
3 Ventana de destino Motion Complete
Fig. 6.7 Motion Complete – Ejemplo modo de velocidad
Resumen de parámetros e I/Os de Motion Complete
Parámetros involucrados Parámetros PNUModo directo fuerza
� B.4.16
Ventana de mensaje de fuerza alcanzada (ventana de
destino para modo de fuerza en selección de
frase/tarea directa)
552
Modo directo
velocidad � B.4.17
Ventana de mensaje de velocidad alcanzada (ventana
de destino para modo de velocidad en selección de
frase/tarea directa)
561
Parámetros del
controlador
(modo directo
posicionamiento)
� B.4.22
Ventana de mensaje de destino alcanzado (ventana de
destino para modo de posicionamiento en selección
de frase/tarea directa)
1022
Tiempo de amortiguación de destino alcanzado
(tiempo de amortiguación Motion Complete, válido
para todos los tipos de tareas)
1023
Acuse de recibo (FHPP) SPOS.MC = 1: Motion Complete
Tab. 6.16 Parámetros e I/Os de Motion Complete
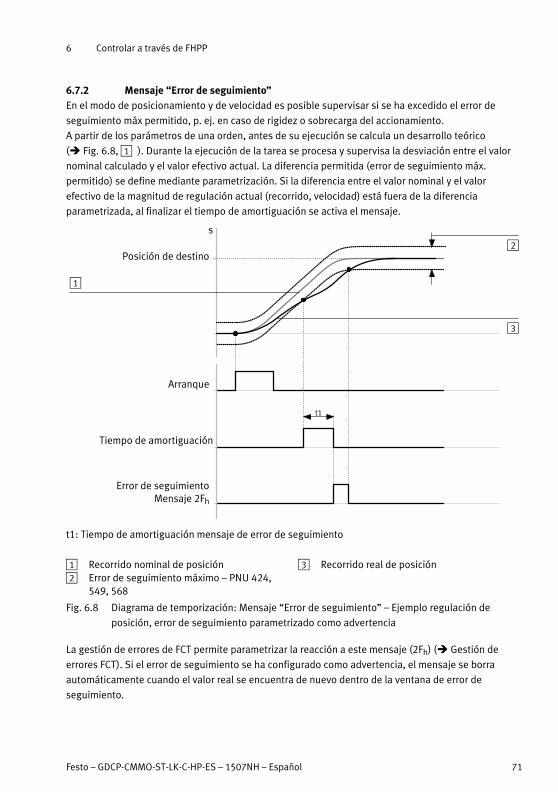
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 71
6.7.2 Mensaje “Error de seguimiento”En el modo de posicionamiento y de velocidad es posible supervisar si se ha excedido el error de
seguimiento máx permitido, p. ej. en caso de rigidez o sobrecarga del accionamiento.
A partir de los parámetros de una orden, antes de su ejecución se calcula un desarrollo teórico
(� Fig. 6.8, 1 ). Durante la ejecución de la tarea se procesa y supervisa la desviación entre el valor
nominal calculado y el valor efectivo actual. La diferencia permitida (error de seguimiento máx.
permitido) se define mediante parametrización. Si la diferencia entre el valor nominal y el valor
efectivo de la magnitud de regulación actual (recorrido, velocidad) está fuera de la diferencia
parametrizada, al finalizar el tiempo de amortiguación se activa el mensaje.
Posición de destino
t1
Tiempo de amortiguación
Arranque
Error de seguimientoMensaje 2Fh
1
2
3
s
t1: Tiempo de amortiguación mensaje de error de seguimiento
1 Recorrido nominal de posición2 Error de seguimiento máximo – PNU 424,
549, 568
3 Recorrido real de posición
Fig. 6.8 Diagrama de temporización: Mensaje “Error de seguimiento” – Ejemplo regulación de
posición, error de seguimiento parametrizado como advertencia
La gestión de errores de FCT permite parametrizar la reacción a este mensaje (2Fh) (� Gestión de
errores FCT). Si el error de seguimiento se ha configurado como advertencia, el mensaje se borra
automáticamente cuando el valor real se encuentra de nuevo dentro de la ventana de error de
seguimiento.
6 Controlar a través de FHPP
72 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Resumen de parámetros e I/Os de error de seguimiento
Parámetros involucrados Parámetros PNUDatos de frase
� B.4.8
Desviación de regulación máx. (error de seguimiento
máx. para modo de posición o modo de velocidad con
selección de frase)
424
Modo directo posición
� B.4.15
Ventana de mensaje de error de seguimiento (error de
seguimiento máx. para modo de posición con tarea
directa)
549
Modo directo
revoluciones � B.4.17
Ventana de mensaje de desviación de regulación máx.
(error de seguimiento máx. para modo de velocidad
con selección de frase)
568
Supervisión de error
de seguimiento
� B.4.22
Retardo de respuesta error de seguimiento (tiempo de
amortiguación mensaje error de seguimiento para
todas las tareas)
1045
Acuse de recibo (FHPP) SPOS.FOLERR = 1: Error de seguimiento
Tab. 6.17 Parámetros e I/Os de error de seguimiento
6.7.3 Mensaje “Supervisión de reposo”La supervisión de reposo comprueba en el modo de posicionamiento si el accionamiento se encuentra
dentro de la ventana de reposo de la posición de destino durante el tiempo de amortiguación
(� Fig. 6.9).
La supervisión de reposo se activa automáticamente después de alcanzar la posición de destino
(“Motion Complete”). La supervisión de reposo se puede suprimir en caso necesario, para ello debe
ajustarse la ventana de reposo con el valor “0”.
Si abandona la posición real del accionamiento durante la supervisión de reposo, p. ej. a través
fuerzas externas de la ventana de reposo mientras dura el tiempo de supervisión de reposo, el
controlador de motor reacciona de la siguiente manera:
– Se genera el mensaje de diagnosis “Supervisión de reposo”.
La reacción ante el mensaje de diagnosis se puede parametrizar con la gestión de errores del FCT.
Si el mensaje de diagnosis está parametrizado como advertencia, el mensaje se borra
automáticamente en cuanto la posición real se encuentre de nuevo dentro de la ventana de reposo
o se inicie una tarea nueva.
– El controlador de posición intenta desplazar el accionamiento de nuevo a la ventana de reposo.
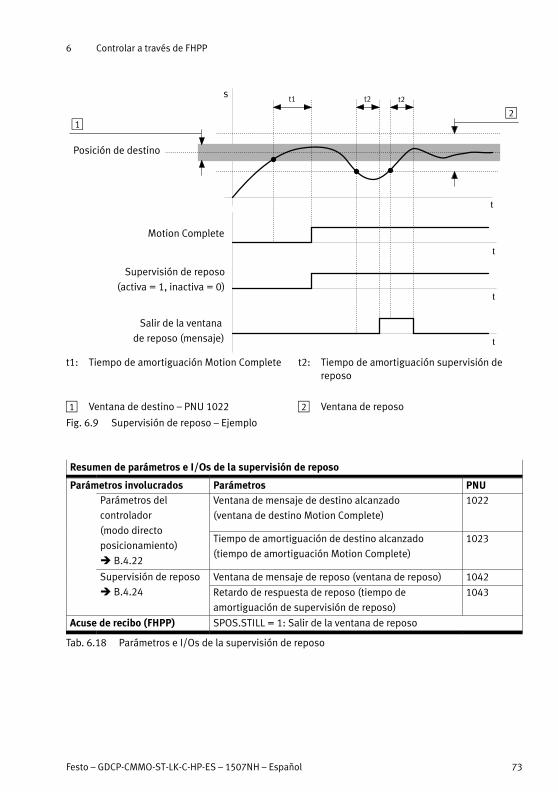
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 73
Motion Complete
Supervisión de reposo
(activa = 1, inactiva = 0)
t
t
t
t
s
Salir de la ventana
de reposo (mensaje)
Posición de destino
t1 t2 t2
12
t1: Tiempo de amortiguación Motion Complete t2: Tiempo de amortiguación supervisión dereposo
1 Ventana de destino – PNU 1022 2 Ventana de reposo
Fig. 6.9 Supervisión de reposo – Ejemplo
Resumen de parámetros e I/Os de la supervisión de reposo
Parámetros involucrados Parámetros PNUParámetros del
controlador
(modo directo
posicionamiento)
� B.4.22
Ventana de mensaje de destino alcanzado
(ventana de destino Motion Complete)
1022
Tiempo de amortiguación de destino alcanzado
(tiempo de amortiguación Motion Complete)
1023
Supervisión de reposo
� B.4.24
Ventana de mensaje de reposo (ventana de reposo) 1042
Retardo de respuesta de reposo (tiempo de
amortiguación de supervisión de reposo)
1043
Acuse de recibo (FHPP) SPOS.STILL = 1: Salir de la ventana de reposo
Tab. 6.18 Parámetros e I/Os de la supervisión de reposo
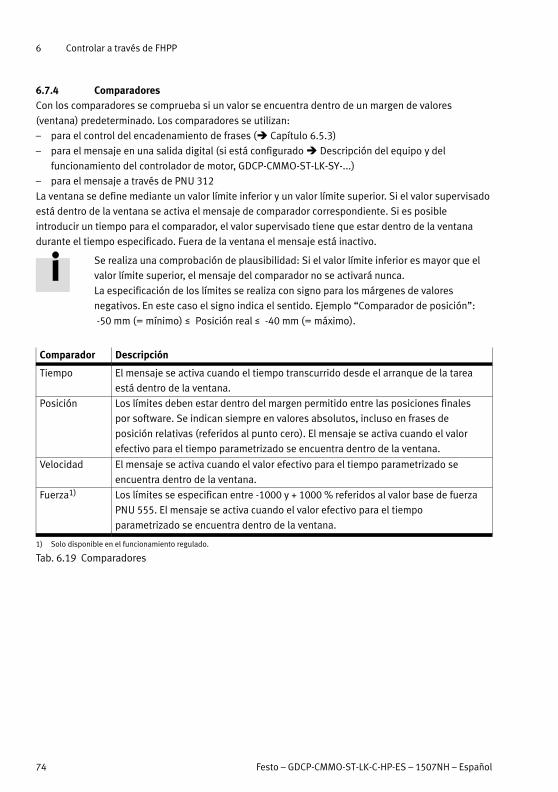
6 Controlar a través de FHPP
74 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
6.7.4 ComparadoresCon los comparadores se comprueba si un valor se encuentra dentro de un margen de valores
(ventana) predeterminado. Los comparadores se utilizan:
– para el control del encadenamiento de frases (� Capítulo 6.5.3)
– para el mensaje en una salida digital (si está configurado � Descripción del equipo y del
funcionamiento del controlador de motor, GDCP-CMMO-ST-LK-SY-...)
– para el mensaje a través de PNU 312
La ventana se define mediante un valor límite inferior y un valor límite superior. Si el valor supervisado
está dentro de la ventana se activa el mensaje de comparador correspondiente. Si es posible
introducir un tiempo para el comparador, el valor supervisado tiene que estar dentro de la ventana
durante el tiempo especificado. Fuera de la ventana el mensaje está inactivo.
Se realiza una comprobación de plausibilidad: Si el valor límite inferior es mayor que el
valor límite superior, el mensaje del comparador no se activará nunca.
La especificación de los límites se realiza con signo para los márgenes de valores
negativos. En este caso el signo indica el sentido. Ejemplo “Comparador de posición”:
-50 mm (= mínimo) š Posición real š �-40 mm (= máximo).
Comparador Descripción
Tiempo El mensaje se activa cuando el tiempo transcurrido desde el arranque de la tarea
está dentro de la ventana.
Posición Los límites deben estar dentro del margen permitido entre las posiciones finales
por software. Se indican siempre en valores absolutos, incluso en frases de
posición relativas (referidos al punto cero). El mensaje se activa cuando el valor
efectivo para el tiempo parametrizado se encuentra dentro de la ventana.
Velocidad El mensaje se activa cuando el valor efectivo para el tiempo parametrizado se
encuentra dentro de la ventana.
Fuerza1) Los límites se especifican entre -1000 y + 1000 % referidos al valor base de fuerza
PNU 555. El mensaje se activa cuando el valor efectivo para el tiempo
parametrizado se encuentra dentro de la ventana.
1) Solo disponible en el funcionamiento regulado.
Tab. 6.19 Comparadores
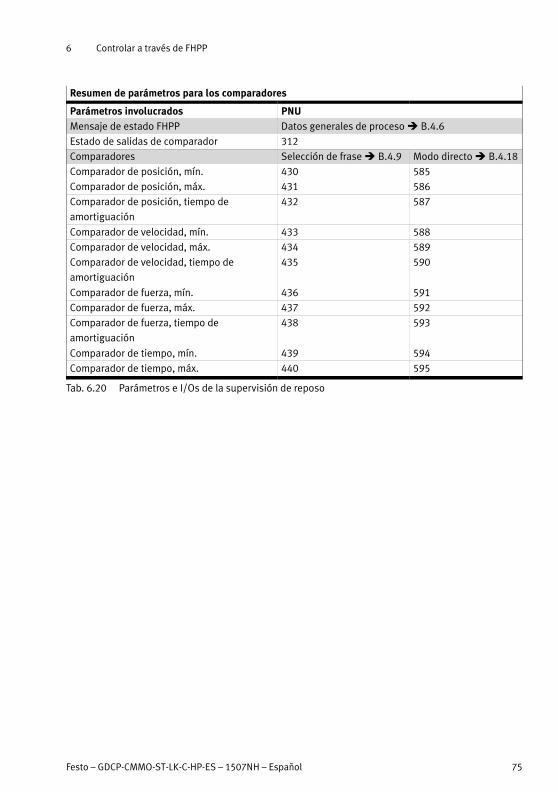
6 Controlar a través de FHPP
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 75
Resumen de parámetros para los comparadores
Parámetros involucrados PNUMensaje de estado FHPP Datos generales de proceso � B.4.6
Estado de salidas de comparador 312
Comparadores Selección de frase � B.4.9 Modo directo � B.4.18
Comparador de posición, mín. 430 585
Comparador de posición, máx. 431 586
Comparador de posición, tiempo de
amortiguación
432 587
Comparador de velocidad, mín. 433 588
Comparador de velocidad, máx. 434 589
Comparador de velocidad, tiempo de
amortiguación
435 590
Comparador de fuerza, mín. 436 591
Comparador de fuerza, máx. 437 592
Comparador de fuerza, tiempo de
amortiguación
438 593
Comparador de tiempo, mín. 439 594
Comparador de tiempo, máx. 440 595
Tab. 6.20 Parámetros e I/Os de la supervisión de reposo
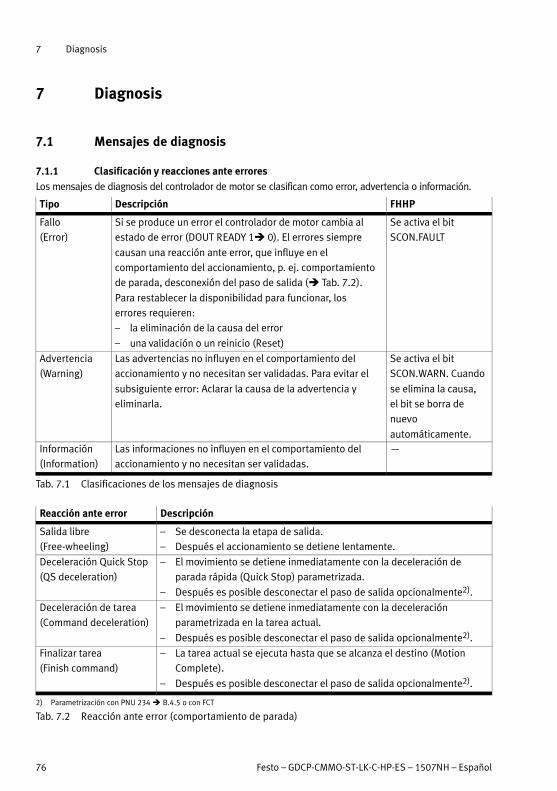
7 Diagnosis
76 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
7 Diagnosis
7.1 Mensajes de diagnosis
7.1.1 Clasificación y reacciones ante errores
Los mensajes de diagnosis del controlador de motor se clasifican como error, advertencia o información.
Tipo Descripción FHHP
Fallo
(Error)
Si se produce un error el controlador de motor cambia al
estado de error (DOUT READY 1� 0). El errores siempre
causan una reacción ante error, que influye en el
comportamiento del accionamiento, p. ej. comportamiento
de parada, desconexión del paso de salida (� Tab. 7.2).
Para restablecer la disponibilidad para funcionar, los
errores requieren:
– la eliminación de la causa del error
– una validación o un reinicio (Reset)
Se activa el bit
SCON.FAULT
Advertencia
(Warning)
Las advertencias no influyen en el comportamiento del
accionamiento y no necesitan ser validadas. Para evitar el
subsiguiente error: Aclarar la causa de la advertencia y
eliminarla.
Se activa el bit
SCON.WARN. Cuando
se elimina la causa,
el bit se borra de
nuevo
automáticamente.Información
(Information)
Las informaciones no influyen en el comportamiento del
accionamiento y no necesitan ser validadas.
—
Tab. 7.1 Clasificaciones de los mensajes de diagnosis
Reacción ante error Descripción
Salida libre
(Free-wheeling)
– Se desconecta la etapa de salida.
– Después el accionamiento se detiene lentamente.
Deceleración Quick Stop
(QS deceleration)
– El movimiento se detiene inmediatamente con la deceleración de
parada rápida (Quick Stop) parametrizada.
– Después es posible desconectar el paso de salida opcionalmente2).
Deceleración de tarea
(Command deceleration)
– El movimiento se detiene inmediatamente con la deceleración
parametrizada en la tarea actual.
– Después es posible desconectar el paso de salida opcionalmente2).
Finalizar tarea
(Finish command)
– La tarea actual se ejecuta hasta que se alcanza el destino (Motion
Complete).
– Después es posible desconectar el paso de salida opcionalmente2).
2) Parametrización con PNU 234 � B.4.5 o con FCT
Tab. 7.2 Reacción ante error (comportamiento de parada)
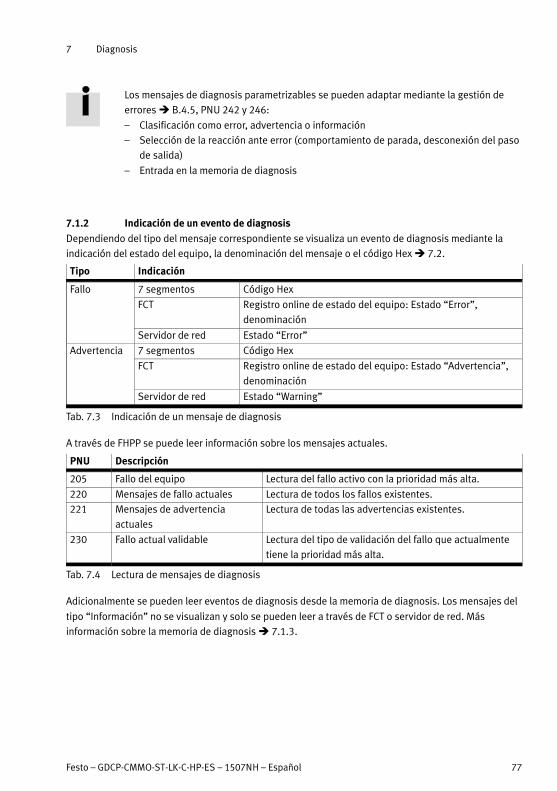
7 Diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 77
Los mensajes de diagnosis parametrizables se pueden adaptar mediante la gestión de
errores � B.4.5, PNU 242 y 246:
– Clasificación como error, advertencia o información
– Selección de la reacción ante error (comportamiento de parada, desconexión del paso
de salida)
– Entrada en la memoria de diagnosis
7.1.2 Indicación de un evento de diagnosis
Dependiendo del tipo del mensaje correspondiente se visualiza un evento de diagnosis mediante la
indicación del estado del equipo, la denominación del mensaje o el código Hex � 7.2.
Tipo Indicación
Fallo 7 segmentos Código Hex
FCT Registro online de estado del equipo: Estado “Error”,
denominación
Servidor de red Estado “Error”
Advertencia 7 segmentos Código Hex
FCT Registro online de estado del equipo: Estado “Advertencia”,
denominación
Servidor de red Estado “Warning”
Tab. 7.3 Indicación de un mensaje de diagnosis
A través de FHPP se puede leer información sobre los mensajes actuales.
PNU Descripción
205 Fallo del equipo Lectura del fallo activo con la prioridad más alta.
220 Mensajes de fallo actuales Lectura de todos los fallos existentes.
221 Mensajes de advertencia
actuales
Lectura de todas las advertencias existentes.
230 Fallo actual validable Lectura del tipo de validación del fallo que actualmente
tiene la prioridad más alta.
Tab. 7.4 Lectura de mensajes de diagnosis
Adicionalmente se pueden leer eventos de diagnosis desde la memoria de diagnosis. Los mensajes del
tipo “Información” no se visualizan y solo se pueden leer a través de FCT o servidor de red. Más
información sobre la memoria de diagnosis � 7.1.3.
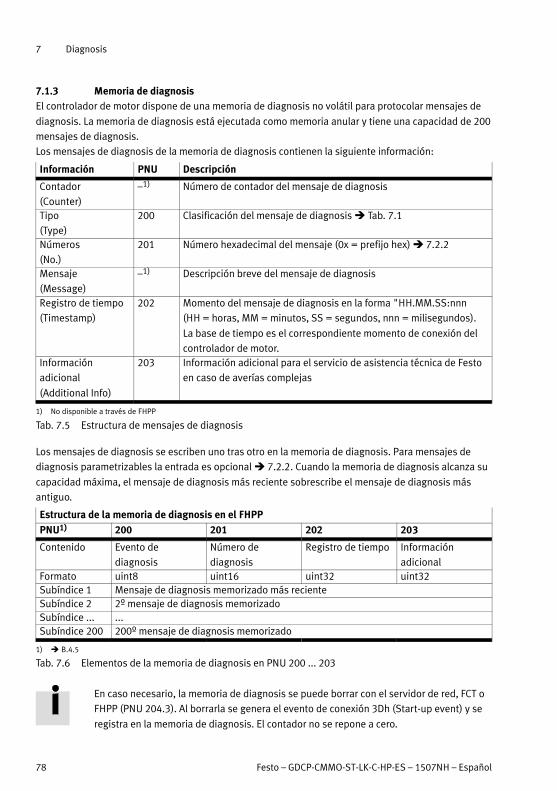
7 Diagnosis
78 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
7.1.3 Memoria de diagnosisEl controlador de motor dispone de una memoria de diagnosis no volátil para protocolar mensajes de
diagnosis. La memoria de diagnosis está ejecutada como memoria anular y tiene una capacidad de 200
mensajes de diagnosis.
Los mensajes de diagnosis de la memoria de diagnosis contienen la siguiente información:
Información PNU Descripción
Contador
(Counter)
–1) Número de contador del mensaje de diagnosis
Tipo
(Type)
200 Clasificación del mensaje de diagnosis � Tab. 7.1
Números
(No.)
201 Número hexadecimal del mensaje (0x = prefijo hex) � 7.2.2
Mensaje
(Message)
–1) Descripción breve del mensaje de diagnosis
Registro de tiempo
(Timestamp)
202 Momento del mensaje de diagnosis en la forma "HH.MM.SS:nnn
(HH = horas, MM = minutos, SS = segundos, nnn = milisegundos).
La base de tiempo es el correspondiente momento de conexión del
controlador de motor.Información
adicional
(Additional Info)
203 Información adicional para el servicio de asistencia técnica de Festo
en caso de averías complejas
1) No disponible a través de FHPP
Tab. 7.5 Estructura de mensajes de diagnosis
Los mensajes de diagnosis se escriben uno tras otro en la memoria de diagnosis. Para mensajes de
diagnosis parametrizables la entrada es opcional � 7.2.2. Cuando la memoria de diagnosis alcanza su
capacidad máxima, el mensaje de diagnosis más reciente sobrescribe el mensaje de diagnosis más
antiguo.
Estructura de la memoria de diagnosis en el FHPP
PNU1) 200 201 202 203
Contenido Evento de
diagnosis
Número de
diagnosis
Registro de tiempo Información
adicionalFormato uint8 uint16 uint32 uint32Subíndice 1 Mensaje de diagnosis memorizado más recienteSubíndice 2 2º mensaje de diagnosis memorizadoSubíndice ... ...Subíndice 200 200º mensaje de diagnosis memorizado
1) � B.4.5
Tab. 7.6 Elementos de la memoria de diagnosis en PNU 200 ... 203
En caso necesario, la memoria de diagnosis se puede borrar con el servidor de red, FCT o
FHPP (PNU 204.3). Al borrarla se genera el evento de conexión 3Dh (Start-up event) y se
registra en la memoria de diagnosis. El contador no se repone a cero.
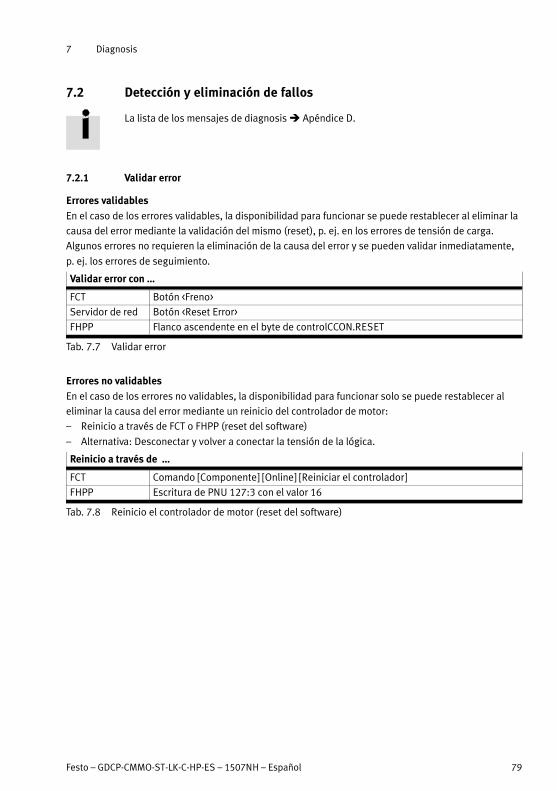
7 Diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 79
7.2 Detección y eliminación de fallos
La lista de los mensajes de diagnosis � Apéndice D.
7.2.1 Validar error
Errores validables
En el caso de los errores validables, la disponibilidad para funcionar se puede restablecer al eliminar la
causa del error mediante la validación del mismo (reset), p. ej. en los errores de tensión de carga.
Algunos errores no requieren la eliminación de la causa del error y se pueden validar inmediatamente,
p. ej. los errores de seguimiento.
Validar error con …
FCT Botón <Freno>
Servidor de red Botón <Reset Error>
FHPP Flanco ascendente en el byte de controlCCON.RESET
Tab. 7.7 Validar error
Errores no validables
En el caso de los errores no validables, la disponibilidad para funcionar solo se puede restablecer al
eliminar la causa del error mediante un reinicio del controlador de motor:
– Reinicio a través de FCT o FHPP (reset del software)
– Alternativa: Desconectar y volver a conectar la tensión de la lógica.
Reinicio a través de …
FCT Comando [Componente]�[Online]�[Reiniciar el controlador]
FHPP Escritura de PNU 127:3 con el valor 16
Tab. 7.8 Reinicio el controlador de motor (reset del software)
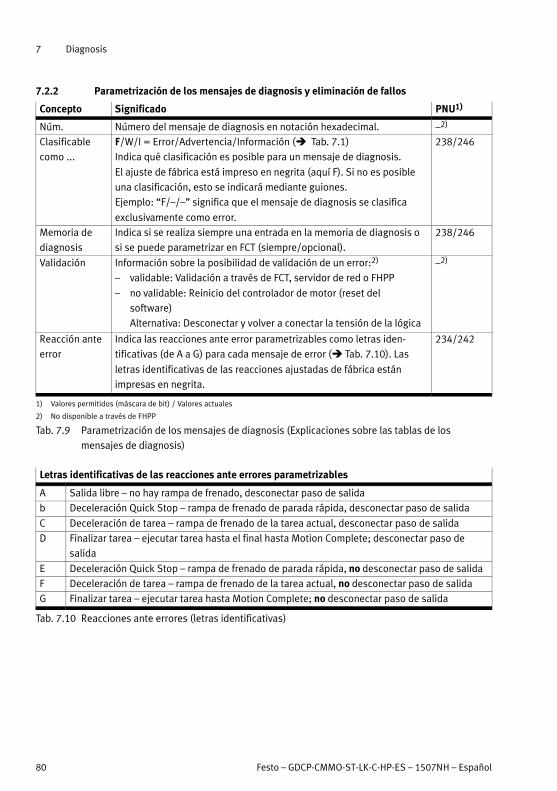
7 Diagnosis
80 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
7.2.2 Parametrización de los mensajes de diagnosis y eliminación de fallos
Concepto Significado PNU1)
Núm. Número del mensaje de diagnosis en notación hexadecimal. –2)
Clasificable
como ...
F/W/I = Error/Advertencia/Información (� Tab. 7.1)
Indica qué clasificación es posible para un mensaje de diagnosis.
El ajuste de fábrica está impreso en negrita (aquí F). Si no es posible
una clasificación, esto se indicará mediante guiones.
Ejemplo: “F/–/–” significa que el mensaje de diagnosis se clasifica
exclusivamente como error.
238/246
Memoria de
diagnosis
Indica si se realiza siempre una entrada en la memoria de diagnosis o
si se puede parametrizar en FCT (siempre/opcional).
238/246
Validación Información sobre la posibilidad de validación de un error:2)
– validable: Validación a través de FCT, servidor de red o FHPP
– no validable: Reinicio del controlador de motor (reset del
software)
Alternativa: Desconectar y volver a conectar la tensión de la lógica
–2)
Reacción ante
error
Indica las reacciones ante error parametrizables como letras iden
tificativas (de A a G) para cada mensaje de error (� Tab. 7.10). Las
letras identificativas de las reacciones ajustadas de fábrica están
impresas en negrita.
234/242
1) Valores permitidos (máscara de bit) / Valores actuales
2) No disponible a través de FHPP
Tab. 7.9 Parametrización de los mensajes de diagnosis (Explicaciones sobre las tablas de los
mensajes de diagnosis)
Letras identificativas de las reacciones ante errores parametrizables
A Salida libre – no hay rampa de frenado, desconectar paso de salida
b Deceleración Quick Stop – rampa de frenado de parada rápida, desconectar paso de salida
C Deceleración de tarea – rampa de frenado de la tarea actual, desconectar paso de salida
D Finalizar tarea – ejecutar tarea hasta el final hasta Motion Complete; desconectar paso de
salida
E Deceleración Quick Stop – rampa de frenado de parada rápida, no desconectar paso de salida
F Deceleración de tarea – rampa de frenado de la tarea actual, no desconectar paso de salida
G Finalizar tarea – ejecutar tarea hasta Motion Complete; no desconectar paso de salida
Tab. 7.10 Reacciones ante errores (letras identificativas)

A Apéndice técnico
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 81
A Apéndice técnico
A.1 Incrementos
A.1.1 Incrementos de encoder [EINC]
El controlador de motor trabaja en el margen de regulación del actuador (p. ej. en el generador de
trayectoria) con incrementos de encoder [EINC].
A.1.2 Incrementos de interfaz [SINC]En todas las interfaces de usuario y en el margen del almacenamiento interno de datos se utilizan, sin
embargo, los llamados incrementos de interfaz [SINC]. Con ellos se evitan errores de redondeo al
escribir y leer valores.
Tamaño de un SINCLos incrementos de interfaz en principio son adimensionales, es decir, no poseen unidades ni
magnitudes definidas. La unidad, es decir, el tamaño de un incremento de interfaz (SINC) se determina
en los objetos del grupo de factores (exponente de diez PNU 600 y unidad de medida PNU 601):
Objetos del grupo de factores (Factor Group)
Nombre PNU Objeto Tipo Acceso
Exponente de diez posición (Position Notation Index) 600 Var int8 rw2
Unidad de medida posición (Position Dimension Index) 601 Var uint8 rw2
Tab. A.1 resumen del grupo de factores
En la parametrización mediante FCT para las especificaciones de longitud se pueden
utilizar unidades habituales, tales como milímetros o pulgadas. No se necesitan
incrementos de interfaz.
Parametrice el accionamiento por completo en FCT y a continuación lea los objetos de los
grupos de factores (exponente de diez PNU 600 y unidad de medida PNU 601).
Ejemplo
Exponente de diez PNU 600 = -7
Unidad de medida PNU 601 = metro (0x01)
Cálculo:
– 1 SINC: 1 * 10-7 m = 0,1μm
– 10.000 SINC: 10.000 * 10-7 m = 1 mm
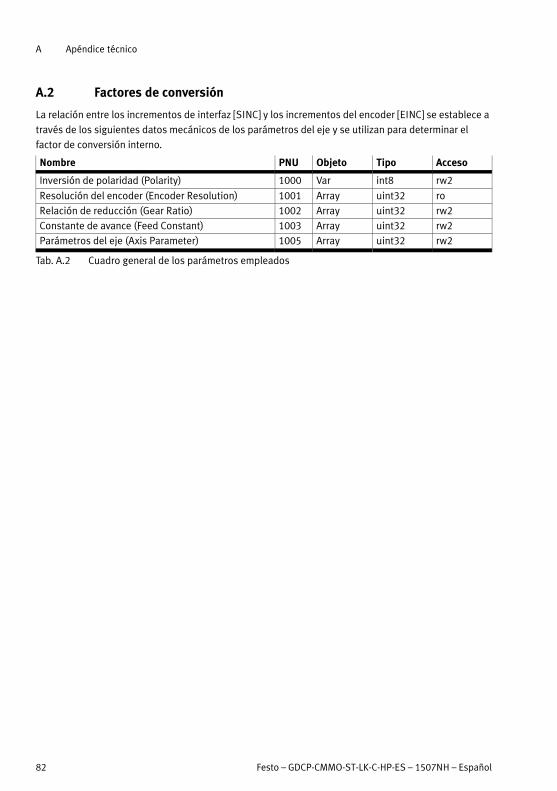
A Apéndice técnico
82 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
A.2 Factores de conversión
La relación entre los incrementos de interfaz [SINC] y los incrementos del encoder [EINC] se establece a
través de los siguientes datos mecánicos de los parámetros del eje y se utilizan para determinar el
factor de conversión interno.
Nombre PNU Objeto Tipo Acceso
Inversión de polaridad (Polarity) 1000 Var int8 rw2
Resolución del encoder (Encoder Resolution) 1001 Array uint32 ro
Relación de reducción (Gear Ratio) 1002 Array uint32 rw2
Constante de avance (Feed Constant) 1003 Array uint32 rw2
Parámetros del eje (Axis Parameter) 1005 Array uint32 rw2
Tab. A.2 Cuadro general de los parámetros empleados
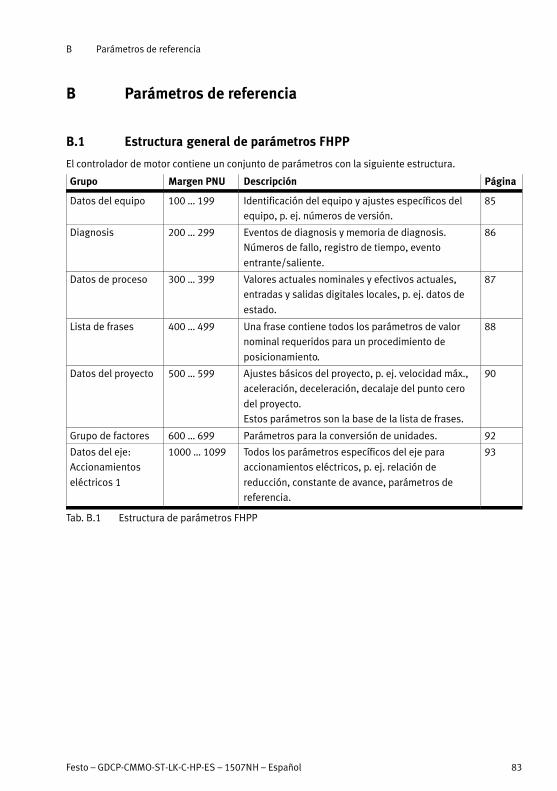
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 83
B Parámetros de referencia
B.1 Estructura general de parámetros FHPP
El controlador de motor contiene un conjunto de parámetros con la siguiente estructura.
Grupo Margen PNU Descripción Página
Datos del equipo 100 … 199 Identificación del equipo y ajustes específicos del
equipo, p. ej. números de versión.
85
Diagnosis 200 … 299 Eventos de diagnosis y memoria de diagnosis.
Números de fallo, registro de tiempo, evento
entrante/saliente.
86
Datos de proceso 300 … 399 Valores actuales nominales y efectivos actuales,
entradas y salidas digitales locales, p. ej. datos de
estado.
87
Lista de frases 400 … 499 Una frase contiene todos los parámetros de valor
nominal requeridos para un procedimiento de
posicionamiento.
88
Datos del proyecto 500 … 599 Ajustes básicos del proyecto, p. ej. velocidad máx.,
aceleración, deceleración, decalaje del punto cero
del proyecto.
Estos parámetros son la base de la lista de frases.
90
Grupo de factores 600 … 699 Parámetros para la conversión de unidades. 92
Datos del eje:
Accionamientos
eléctricos 1
1000 … 1099 Todos los parámetros específicos del eje para
accionamientos eléctricos, p. ej. relación de
reducción, constante de avance, parámetros de
referencia.
93
Tab. B.1 Estructura de parámetros FHPP
B Parámetros de referencia
84 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.2 Protección de acceso y control de nivel superior
El usuario puede bloquear el funcionamiento simultáneo del accionamiento a través del control y del
Festo Configuration Tool (FCT). Para ello se utilizan los bits CCON.LOCK (bloquear acceso de FCT) y
SCON.FCT/MMI (control de nivel superior de FCT).
Bloqueo del manejo a través de FCT: CCON.LOCK
Al activar el bit de control CCON.LOCK el control impide que el FCT asuma el control de nivel superior.
Con CCON.LOCK activado, el FCT no puede escribir parámetros ni controlar el accionamiento, ni ejecutar
recorridos de referencia, etc.
El control se programa de forma que este desbloqueo no se produce hasta que se tramita la
correspondiente acción del usuario. Al hacerlo, se suele salir del funcionamiento automático. De este
modo el programador del control puede garantizar que el control siempre sepa cuándo tiene el control
del accionamiento.
Importante: El bloqueo está activo cuando el bit CCON.LOCK tiene la señal 1. El usuario que no precisa
dicho bloqueo siempre puede dejar su valor a 0.
Acuse de recibo del control de nivel superior con FCT: SCON.FCT/MMIEste bit informa al control de que el actuador es guiado por el FCT y que ya no tiene ningún control
sobre el actuador. Este bit no precisa ser evaluado. Una posible reacción del control es la transición al
funcionamiento de parada o manual.
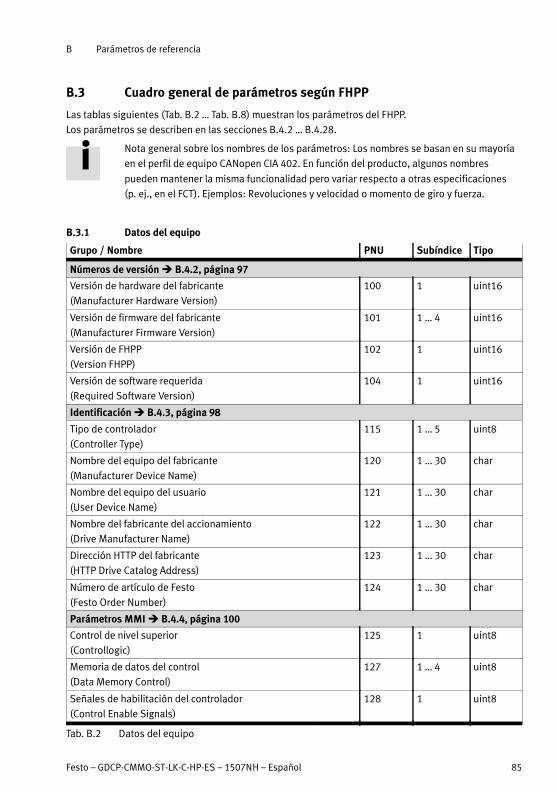
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 85
B.3 Cuadro general de parámetros según FHPP
Las tablas siguientes (Tab. B.2 … Tab. B.8) muestran los parámetros del FHPP.
Los parámetros se describen en las secciones B.4.2 … B.4.28.
Nota general sobre los nombres de los parámetros: Los nombres se basan en su mayoría
en el perfil de equipo CANopen CIA 402. En función del producto, algunos nombres
pueden mantener la misma funcionalidad pero variar respecto a otras especificaciones
(p. ej., en el FCT). Ejemplos: Revoluciones y velocidad o momento de giro y fuerza.
B.3.1 Datos del equipo
Grupo / Nombre PNU Subíndice Tipo
Números de versión � B.4.2, página 97
Versión de hardware del fabricante
(Manufacturer Hardware Version)
100 1 uint16
Versión de firmware del fabricante
(Manufacturer Firmware Version)
101 1 … 4 uint16
Versión de FHPP
(Version FHPP)
102 1 uint16
Versión de software requerida
(Required Software Version)
104 1 uint16
Identificación � B.4.3, página 98
Tipo de controlador
(Controller Type)
115 1 … 5 uint8
Nombre del equipo del fabricante
(Manufacturer Device Name)
120 1 … 30 char
Nombre del equipo del usuario
(User Device Name)
121 1 … 30 char
Nombre del fabricante del accionamiento
(Drive Manufacturer Name)
122 1 … 30 char
Dirección HTTP del fabricante
(HTTP Drive Catalog Address)
123 1 … 30 char
Número de artículo de Festo
(Festo Order Number)
124 1 … 30 char
Parámetros MMI � B.4.4, página 100
Control de nivel superior
(Controllogic)
125 1 uint8
Memoria de datos del control
(Data Memory Control)
127 1 … 4 uint8
Señales de habilitación del controlador
(Control Enable Signals)
128 1 uint8
Tab. B.2 Datos del equipo
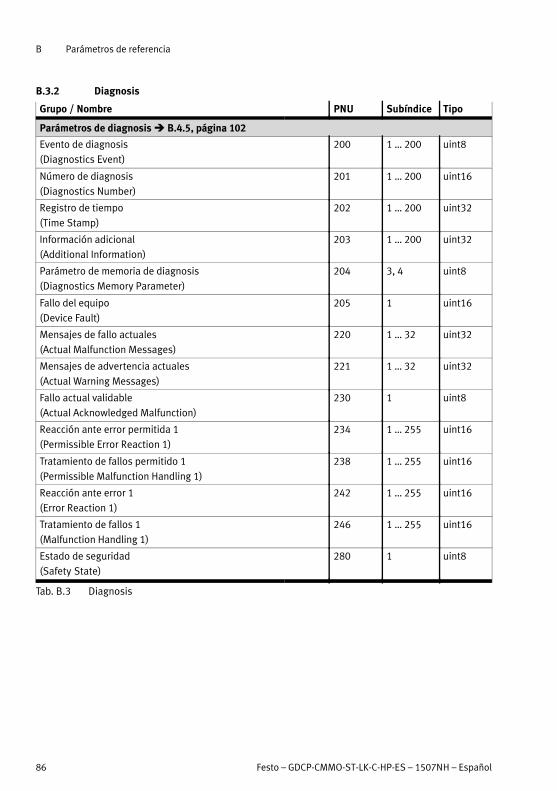
B Parámetros de referencia
86 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.3.2 Diagnosis
Grupo / Nombre PNU Subíndice Tipo
Parámetros de diagnosis � B.4.5, página 102
Evento de diagnosis
(Diagnostics Event)
200 1 … 200 uint8
Número de diagnosis
(Diagnostics Number)
201 1 … 200 uint16
Registro de tiempo
(Time Stamp)
202 1 … 200 uint32
Información adicional
(Additional Information)
203 1 … 200 uint32
Parámetro de memoria de diagnosis
(Diagnostics Memory Parameter)
204 3, 4 uint8
Fallo del equipo
(Device Fault)
205 1 uint16
Mensajes de fallo actuales
(Actual Malfunction Messages)
220 1 … 32 uint32
Mensajes de advertencia actuales
(Actual Warning Messages)
221 1 … 32 uint32
Fallo actual validable
(Actual Acknowledged Malfunction)
230 1 uint8
Reacción ante error permitida 1
(Permissible Error Reaction 1)
234 1 … 255 uint16
Tratamiento de fallos permitido 1
(Permissible Malfunction Handling 1)
238 1 … 255 uint16
Reacción ante error 1
(Error Reaction 1)
242 1 … 255 uint16
Tratamiento de fallos 1
(Malfunction Handling 1)
246 1 … 255 uint16
Estado de seguridad
(Safety State)
280 1 uint8
Tab. B.3 Diagnosis
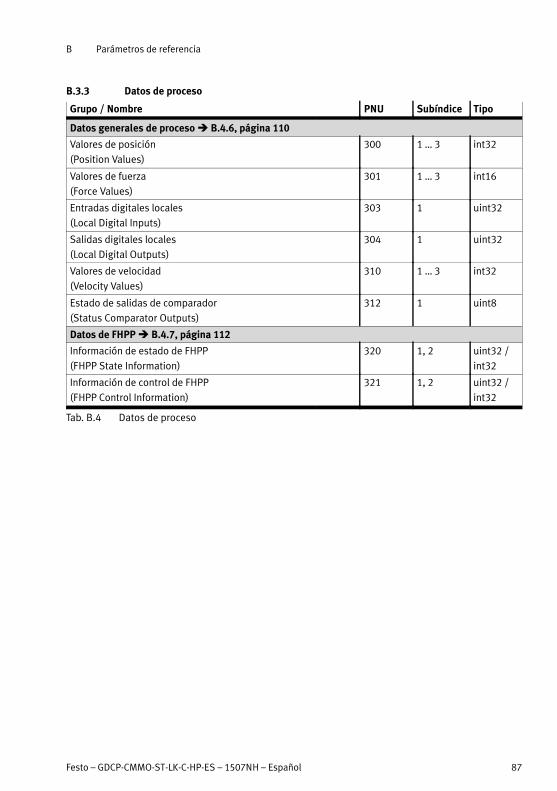
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 87
B.3.3 Datos de proceso
Grupo / Nombre PNU Subíndice Tipo
Datos generales de proceso � B.4.6, página 110
Valores de posición
(Position Values)
300 1 … 3 int32
Valores de fuerza
(Force Values)
301 1 … 3 int16
Entradas digitales locales
(Local Digital Inputs)
303 1 uint32
Salidas digitales locales
(Local Digital Outputs)
304 1 uint32
Valores de velocidad
(Velocity Values)
310 1 … 3 int32
Estado de salidas de comparador
(Status Comparator Outputs)
312 1 uint8
Datos de FHPP � B.4.7, página 112
Información de estado de FHPP
(FHPP State Information)
320 1, 2 uint32 /
int32
Información de control de FHPP
(FHPP Control Information)
321 1, 2 uint32 /
int32
Tab. B.4 Datos de proceso
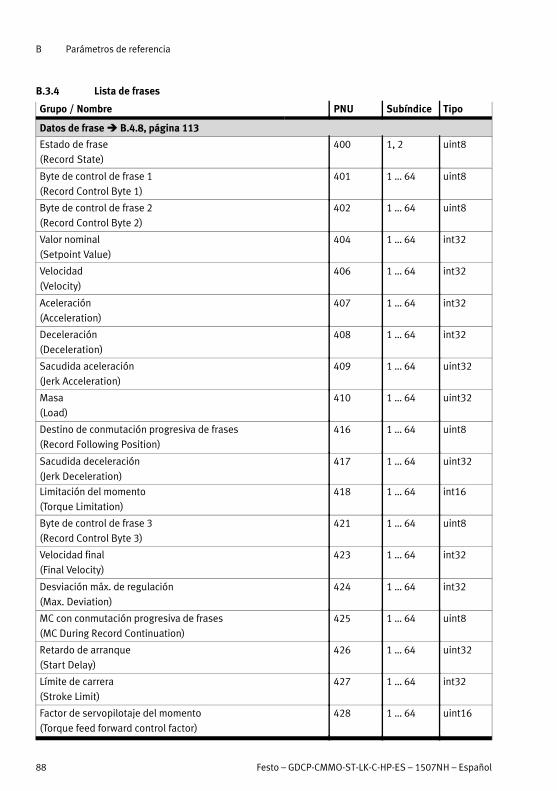
B Parámetros de referencia
88 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.3.4 Lista de frases
Grupo / Nombre PNU Subíndice Tipo
Datos de frase � B.4.8, página 113
Estado de frase
(Record State)
400 1, 2 uint8
Byte de control de frase 1
(Record Control Byte 1)
401 1 … 64 uint8
Byte de control de frase 2
(Record Control Byte 2)
402 1 … 64 uint8
Valor nominal
(Setpoint Value)
404 1 … 64 int32
Velocidad
(Velocity)
406 1 … 64 int32
Aceleración
(Acceleration)
407 1 … 64 int32
Deceleración
(Deceleration)
408 1 … 64 int32
Sacudida aceleración
(Jerk Acceleration)
409 1 … 64 uint32
Masa
(Load)
410 1 … 64 uint32
Destino de conmutación progresiva de frases
(Record Following Position)
416 1 … 64 uint8
Sacudida deceleración
(Jerk Deceleration)
417 1 … 64 uint32
Limitación del momento
(Torque Limitation)
418 1 … 64 int16
Byte de control de frase 3
(Record Control Byte 3)
421 1 … 64 uint8
Velocidad final
(Final Velocity)
423 1 … 64 int32
Desviación máx. de regulación
(Max. Deviation)
424 1 … 64 int32
MC con conmutación progresiva de frases
(MC During Record Continuation)
425 1 … 64 uint8
Retardo de arranque
(Start Delay)
426 1 … 64 uint32
Límite de carrera
(Stroke Limit)
427 1 … 64 int32
Factor de servopilotaje del momento
(Torque feed forward control factor)
428 1 … 64 uint16
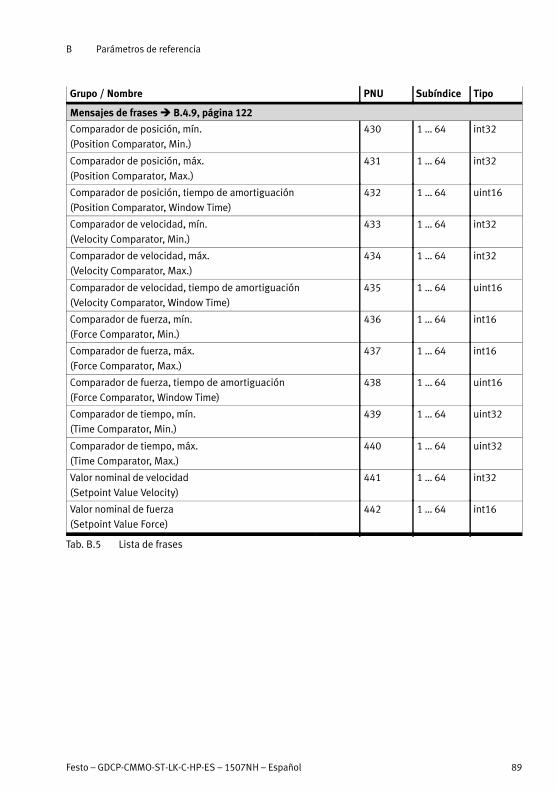
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 89
Grupo / Nombre TipoSubíndicePNU
Mensajes de frases � B.4.9, página 122
Comparador de posición, mín.
(Position Comparator, Min.)
430 1 … 64 int32
Comparador de posición, máx.
(Position Comparator, Max.)
431 1 … 64 int32
Comparador de posición, tiempo de amortiguación
(Position Comparator, Window Time)
432 1 … 64 uint16
Comparador de velocidad, mín.
(Velocity Comparator, Min.)
433 1 … 64 int32
Comparador de velocidad, máx.
(Velocity Comparator, Max.)
434 1 … 64 int32
Comparador de velocidad, tiempo de amortiguación
(Velocity Comparator, Window Time)
435 1 … 64 uint16
Comparador de fuerza, mín.
(Force Comparator, Min.)
436 1 … 64 int16
Comparador de fuerza, máx.
(Force Comparator, Max.)
437 1 … 64 int16
Comparador de fuerza, tiempo de amortiguación
(Force Comparator, Window Time)
438 1 … 64 uint16
Comparador de tiempo, mín.
(Time Comparator, Min.)
439 1 … 64 uint32
Comparador de tiempo, máx.
(Time Comparator, Max.)
440 1 … 64 uint32
Valor nominal de velocidad
(Setpoint Value Velocity)
441 1 … 64 int32
Valor nominal de fuerza
(Setpoint Value Force)
442 1 … 64 int16
Tab. B.5 Lista de frases
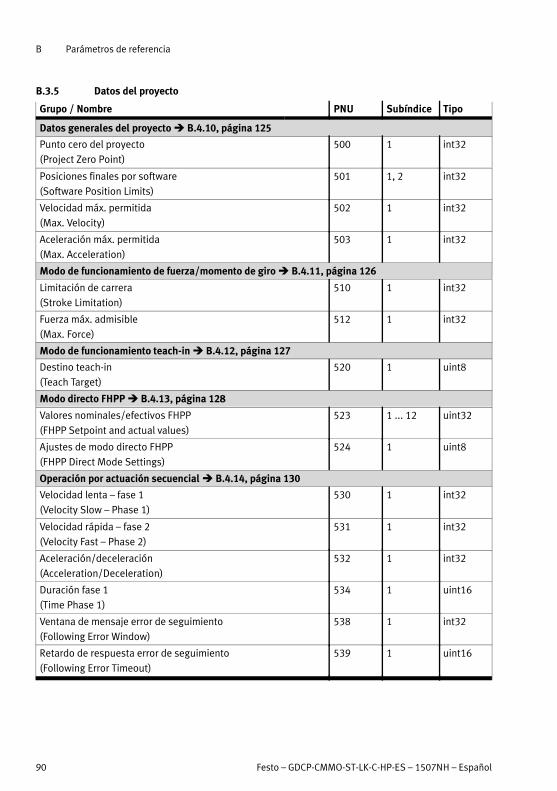
B Parámetros de referencia
90 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.3.5 Datos del proyecto
Grupo / Nombre PNU Subíndice Tipo
Datos generales del proyecto � B.4.10, página 125
Punto cero del proyecto
(Project Zero Point)
500 1 int32
Posiciones finales por software
(Software Position Limits)
501 1, 2 int32
Velocidad máx. permitida
(Max. Velocity)
502 1 int32
Aceleración máx. permitida
(Max. Acceleration)
503 1 int32
Modo de funcionamiento de fuerza/momento de giro � B.4.11, página 126
Limitación de carrera
(Stroke Limitation)
510 1 int32
Fuerza máx. admisible
(Max. Force)
512 1 int32
Modo de funcionamiento teach-in � B.4.12, página 127
Destino teach-in
(Teach Target)
520 1 uint8
Modo directo FHPP � B.4.13, página 128
Valores nominales/efectivos FHPP
(FHPP Setpoint and actual values)
523 1 ... 12 uint32
Ajustes de modo directo FHPP
(FHPP Direct Mode Settings)
524 1 uint8
Operación por actuación secuencial � B.4.14, página 130
Velocidad lenta – fase 1
(Velocity Slow – Phase 1)
530 1 int32
Velocidad rápida – fase 2
(Velocity Fast – Phase 2)
531 1 int32
Aceleración/deceleración
(Acceleration/Deceleration)
532 1 int32
Duración fase 1
(Time Phase 1)
534 1 uint16
Ventana de mensaje error de seguimiento
(Following Error Window)
538 1 int32
Retardo de respuesta error de seguimiento
(Following Error Timeout)
539 1 uint16
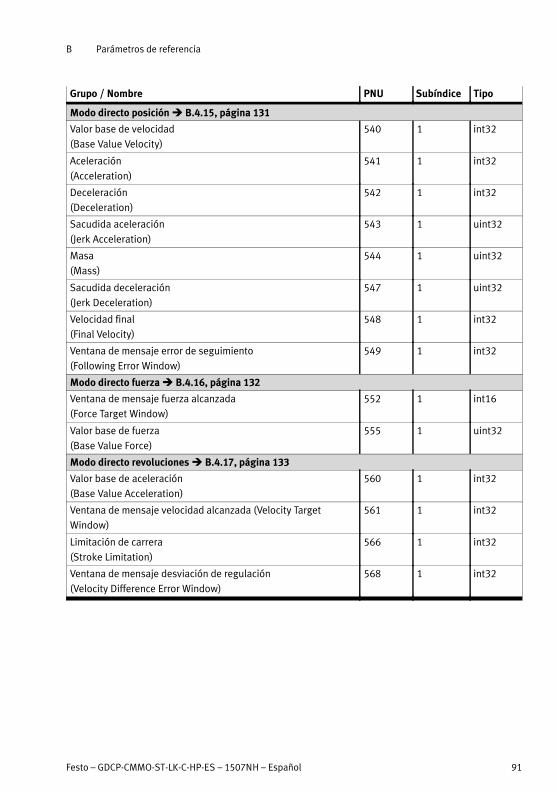
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 91
Grupo / Nombre TipoSubíndicePNU
Modo directo posición � B.4.15, página 131
Valor base de velocidad
(Base Value Velocity)
540 1 int32
Aceleración
(Acceleration)
541 1 int32
Deceleración
(Deceleration)
542 1 int32
Sacudida aceleración
(Jerk Acceleration)
543 1 uint32
Masa
(Mass)
544 1 uint32
Sacudida deceleración
(Jerk Deceleration)
547 1 uint32
Velocidad final
(Final Velocity)
548 1 int32
Ventana de mensaje error de seguimiento
(Following Error Window)
549 1 int32
Modo directo fuerza � B.4.16, página 132
Ventana de mensaje fuerza alcanzada
(Force Target Window)
552 1 int16
Valor base de fuerza
(Base Value Force)
555 1 uint32
Modo directo revoluciones � B.4.17, página 133
Valor base de aceleración
(Base Value Acceleration)
560 1 int32
Ventana de mensaje velocidad alcanzada (Velocity Target
Window)
561 1 int32
Limitación de carrera
(Stroke Limitation)
566 1 int32
Ventana de mensaje desviación de regulación
(Velocity Difference Error Window)
568 1 int32
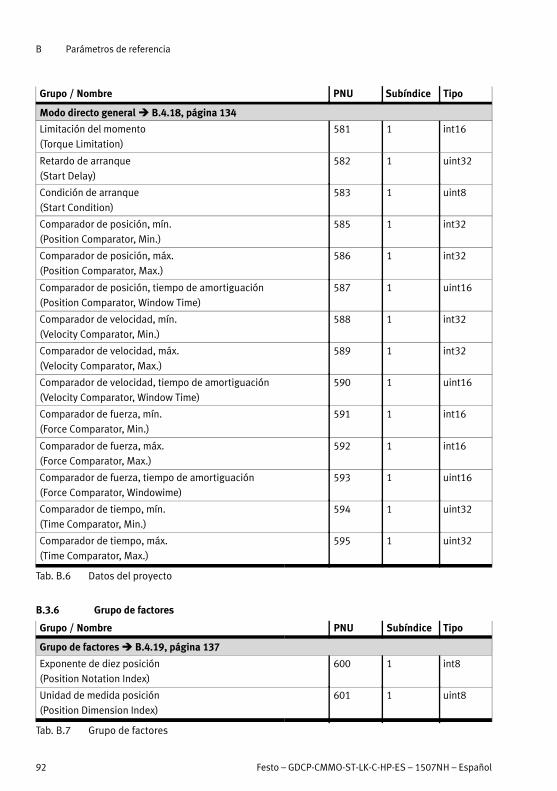
B Parámetros de referencia
92 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Grupo / Nombre TipoSubíndicePNU
Modo directo general � B.4.18, página 134
Limitación del momento
(Torque Limitation)
581 1 int16
Retardo de arranque
(Start Delay)
582 1 uint32
Condición de arranque
(Start Condition)
583 1 uint8
Comparador de posición, mín.
(Position Comparator, Min.)
585 1 int32
Comparador de posición, máx.
(Position Comparator, Max.)
586 1 int32
Comparador de posición, tiempo de amortiguación
(Position Comparator, Window Time)
587 1 uint16
Comparador de velocidad, mín.
(Velocity Comparator, Min.)
588 1 int32
Comparador de velocidad, máx.
(Velocity Comparator, Max.)
589 1 int32
Comparador de velocidad, tiempo de amortiguación
(Velocity Comparator, Window Time)
590 1 uint16
Comparador de fuerza, mín.
(Force Comparator, Min.)
591 1 int16
Comparador de fuerza, máx.
(Force Comparator, Max.)
592 1 int16
Comparador de fuerza, tiempo de amortiguación
(Force Comparator, Windowime)
593 1 uint16
Comparador de tiempo, mín.
(Time Comparator, Min.)
594 1 uint32
Comparador de tiempo, máx.
(Time Comparator, Max.)
595 1 uint32
Tab. B.6 Datos del proyecto
B.3.6 Grupo de factores
Grupo / Nombre PNU Subíndice Tipo
Grupo de factores � B.4.19, página 137
Exponente de diez posición
(Position Notation Index)
600 1 int8
Unidad de medida posición
(Position Dimension Index)
601 1 uint8
Tab. B.7 Grupo de factores
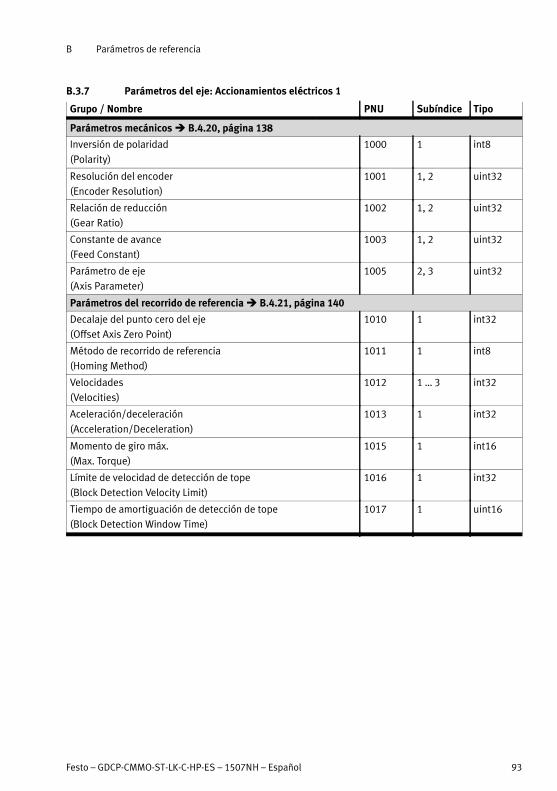
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 93
B.3.7 Parámetros del eje: Accionamientos eléctricos 1
Grupo / Nombre PNU Subíndice Tipo
Parámetros mecánicos � B.4.20, página 138
Inversión de polaridad
(Polarity)
1000 1 int8
Resolución del encoder
(Encoder Resolution)
1001 1, 2 uint32
Relación de reducción
(Gear Ratio)
1002 1, 2 uint32
Constante de avance
(Feed Constant)
1003 1, 2 uint32
Parámetro de eje
(Axis Parameter)
1005 2, 3 uint32
Parámetros del recorrido de referencia � B.4.21, página 140
Decalaje del punto cero del eje
(Offset Axis Zero Point)
1010 1 int32
Método de recorrido de referencia
(Homing Method)
1011 1 int8
Velocidades
(Velocities)
1012 1 … 3 int32
Aceleración/deceleración
(Acceleration/Deceleration)
1013 1 int32
Momento de giro máx.
(Max. Torque)
1015 1 int16
Límite de velocidad de detección de tope
(Block Detection Velocity Limit)
1016 1 int32
Tiempo de amortiguación de detección de tope
(Block Detection Window Time)
1017 1 uint16
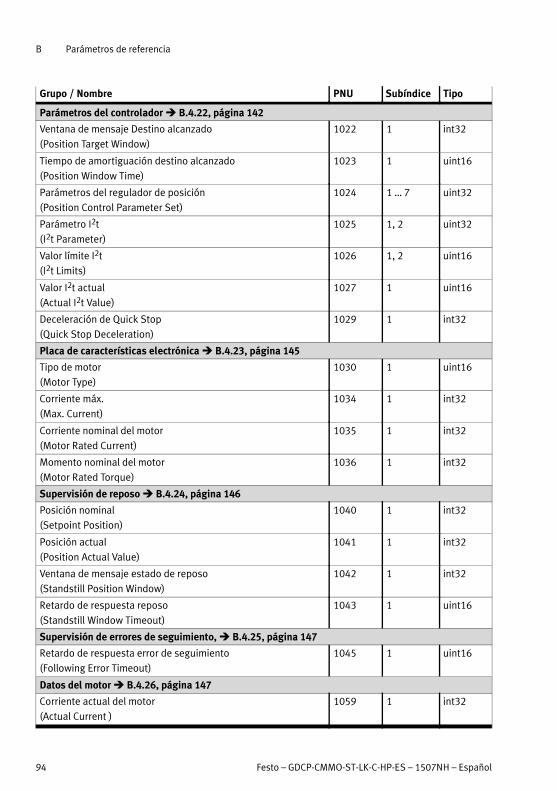
B Parámetros de referencia
94 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Grupo / Nombre TipoSubíndicePNU
Parámetros del controlador � B.4.22, página 142
Ventana de mensaje Destino alcanzado
(Position Target Window)
1022 1 int32
Tiempo de amortiguación destino alcanzado
(Position Window Time)
1023 1 uint16
Parámetros del regulador de posición
(Position Control Parameter Set)
1024 1 … 7 uint32
Parámetro I2t
(I2t Parameter)
1025 1, 2 uint32
Valor límite I2t
(I2t Limits)
1026 1, 2 uint16
Valor I2t actual
(Actual I2t Value)
1027 1 uint16
Deceleración de Quick Stop
(Quick Stop Deceleration)
1029 1 int32
Placa de características electrónica � B.4.23, página 145
Tipo de motor
(Motor Type)
1030 1 uint16
Corriente máx.
(Max. Current)
1034 1 int32
Corriente nominal del motor
(Motor Rated Current)
1035 1 int32
Momento nominal del motor
(Motor Rated Torque)
1036 1 int32
Supervisión de reposo � B.4.24, página 146
Posición nominal
(Setpoint Position)
1040 1 int32
Posición actual
(Position Actual Value)
1041 1 int32
Ventana de mensaje estado de reposo
(Standstill Position Window)
1042 1 int32
Retardo de respuesta reposo
(Standstill Window Timeout)
1043 1 uint16
Supervisión de errores de seguimiento, � B.4.25, página 147
Retardo de respuesta error de seguimiento
(Following Error Timeout)
1045 1 uint16
Datos del motor � B.4.26, página 147
Corriente actual del motor
(Actual Current )
1059 1 int32
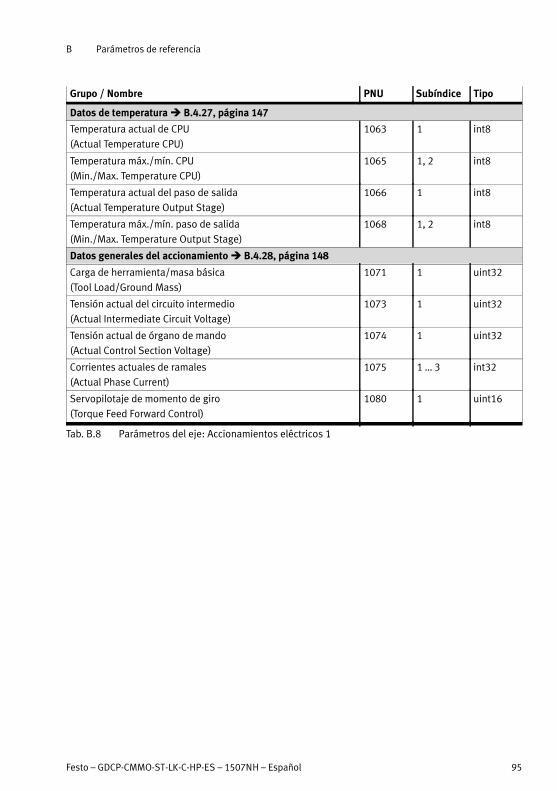
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 95
Grupo / Nombre TipoSubíndicePNU
Datos de temperatura � B.4.27, página 147
Temperatura actual de CPU
(Actual Temperature CPU)
1063 1 int8
Temperatura máx./mín. CPU
(Min./Max. Temperature CPU)
1065 1, 2 int8
Temperatura actual del paso de salida
(Actual Temperature Output Stage)
1066 1 int8
Temperatura máx./mín. paso de salida
(Min./Max. Temperature Output Stage)
1068 1, 2 int8
Datos generales del accionamiento � B.4.28, página 148
Carga de herramienta/masa básica
(Tool Load/Ground Mass)
1071 1 uint32
Tensión actual del circuito intermedio
(Actual Intermediate Circuit Voltage)
1073 1 uint32
Tensión actual de órgano de mando
(Actual Control Section Voltage)
1074 1 uint32
Corrientes actuales de ramales
(Actual Phase Current)
1075 1 … 3 int32
Servopilotaje de momento de giro
(Torque Feed Forward Control)
1080 1 uint16
Tab. B.8 Parámetros del eje: Accionamientos eléctricos 1
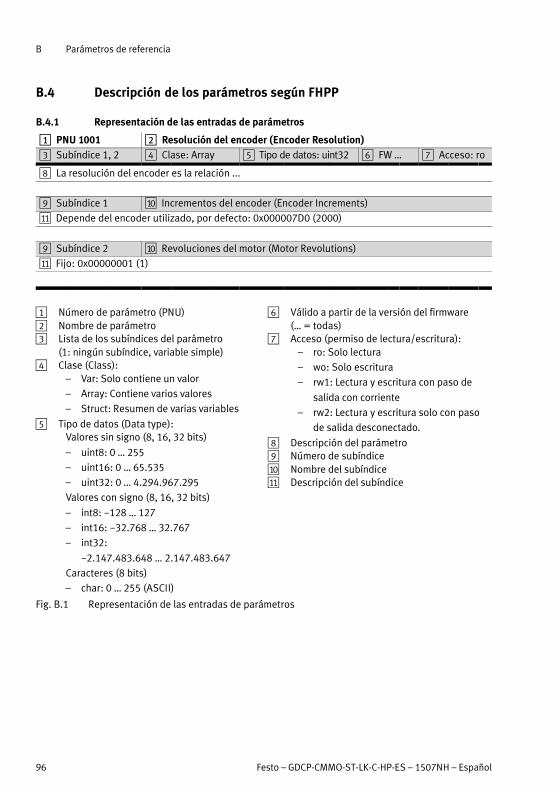
B Parámetros de referencia
96 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4 Descripción de los parámetros según FHPP
B.4.1 Representación de las entradas de parámetros
1 PNU 1001 2 Resolución del encoder (Encoder Resolution)3 Subíndice 1, 2 4 Clase: Array 5 Tipo de datos: uint32 6 FW … 7 Acceso: ro
8 La resolución del encoder es la relación ...
9 Subíndice 1 aJ Incrementos del encoder (Encoder Increments)
aA Depende del encoder utilizado, por defecto: 0x000007D0 (2000)
9 Subíndice 2 aJ Revoluciones del motor (Motor Revolutions)
aA Fijo: 0x00000001 (1)
1 Número de parámetro (PNU)2 Nombre de parámetro3 Lista de los subíndices del parámetro
(1: ningún subíndice, variable simple)4 Clase (Class):
– Var: Solo contiene un valor
– Array: Contiene varios valores
– Struct: Resumen de varias variables
5 Tipo de datos (Data type):Valores sin signo (8, 16, 32 bits)
– uint8: 0 … 255
– uint16: 0 … 65.535
– uint32: 0 … 4.294.967.295
Valores con signo (8, 16, 32 bits)
– int8: −128 … 127
– int16: −32.768 … 32.767
– int32:
−2.147.483.648 … 2.147.483.647
Caracteres (8 bits)
– char: 0 … 255 (ASCII)
6 Válido a partir de la versión del firmware(… = todas)
7 Acceso (permiso de lectura/escritura):– ro: Solo lectura
– wo: Solo escritura
– rw1: Lectura y escritura con paso de
salida con corriente
– rw2: Lectura y escritura solo con paso
de salida desconectado.
8 Descripción del parámetro9 Número de subíndiceaJ Nombre del subíndiceaA Descripción del subíndice
Fig. B.1 Representación de las entradas de parámetros
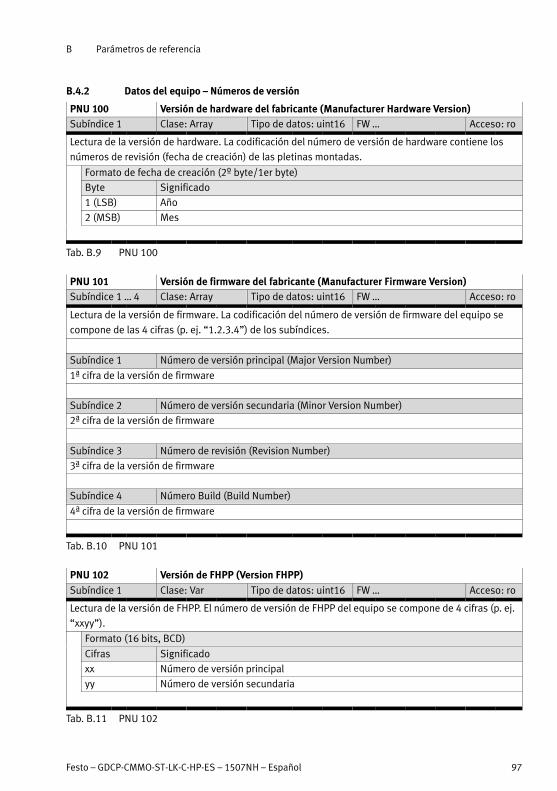
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 97
B.4.2 Datos del equipo – Números de versión
PNU 100 Versión de hardware del fabricante (Manufacturer Hardware Version)Subíndice 1 Clase: Array Tipo de datos: uint16 FW … Acceso: ro
Lectura de la versión de hardware. La codificación del número de versión de hardware contiene los
números de revisión (fecha de creación) de las pletinas montadas.
Formato de fecha de creación (2º byte/1er byte)
Byte Significado
1 (LSB) Año
2 (MSB) Mes
Tab. B.9 PNU 100
PNU 101 Versión de firmware del fabricante (Manufacturer Firmware Version)Subíndice 1 … 4 Clase: Array Tipo de datos: uint16 FW … Acceso: ro
Lectura de la versión de firmware. La codificación del número de versión de firmware del equipo se
compone de las 4 cifras (p. ej. “1.2.3.4”) de los subíndices.
Subíndice 1 Número de versión principal (Major Version Number)
1ª cifra de la versión de firmware
Subíndice 2 Número de versión secundaria (Minor Version Number)
2ª cifra de la versión de firmware
Subíndice 3 Número de revisión (Revision Number)
3ª cifra de la versión de firmware
Subíndice 4 Número Build (Build Number)
4ª cifra de la versión de firmware
Tab. B.10 PNU 101
PNU 102 Versión de FHPP (Version FHPP)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: ro
Lectura de la versión de FHPP. El número de versión de FHPP del equipo se compone de 4 cifras (p. ej.
“xxyy”).
Formato (16 bits, BCD)
Cifras Significado
xx Número de versión principal
yy Número de versión secundaria
Tab. B.11 PNU 102
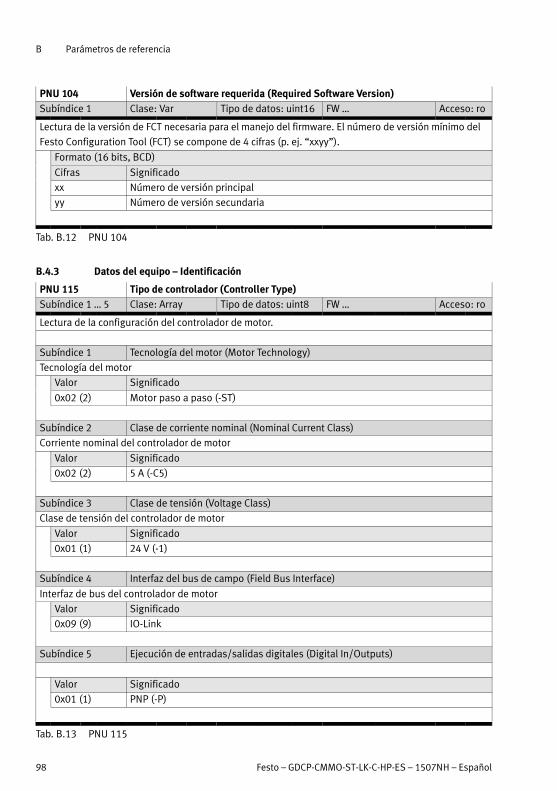
B Parámetros de referencia
98 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 104 Versión de software requerida (Required Software Version)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: ro
Lectura de la versión de FCT necesaria para el manejo del firmware. El número de versión mínimo del
Festo Configuration Tool (FCT) se compone de 4 cifras (p. ej. “xxyy”).
Formato (16 bits, BCD)
Cifras Significado
xx Número de versión principal
yy Número de versión secundaria
Tab. B.12 PNU 104
B.4.3 Datos del equipo – Identificación
PNU 115 Tipo de controlador (Controller Type)Subíndice 1 … 5 Clase: Array Tipo de datos: uint8 FW … Acceso: ro
Lectura de la configuración del controlador de motor.
Subíndice 1 Tecnología del motor (Motor Technology)
Tecnología del motor
Valor Significado
0x02 (2) Motor paso a paso (-ST)
Subíndice 2 Clase de corriente nominal (Nominal Current Class)
Corriente nominal del controlador de motor
Valor Significado
0x02 (2) 5 A (-C5)
Subíndice 3 Clase de tensión (Voltage Class)
Clase de tensión del controlador de motor
Valor Significado
0x01 (1) 24 V (-1)
Subíndice 4 Interfaz del bus de campo (Field Bus Interface)
Interfaz de bus del controlador de motor
Valor Significado
0x09 (9) IO-Link
Subíndice 5 Ejecución de entradas/salidas digitales (Digital In/Outputs)
Valor Significado
0x01 (1) PNP (-P)
Tab. B.13 PNU 115
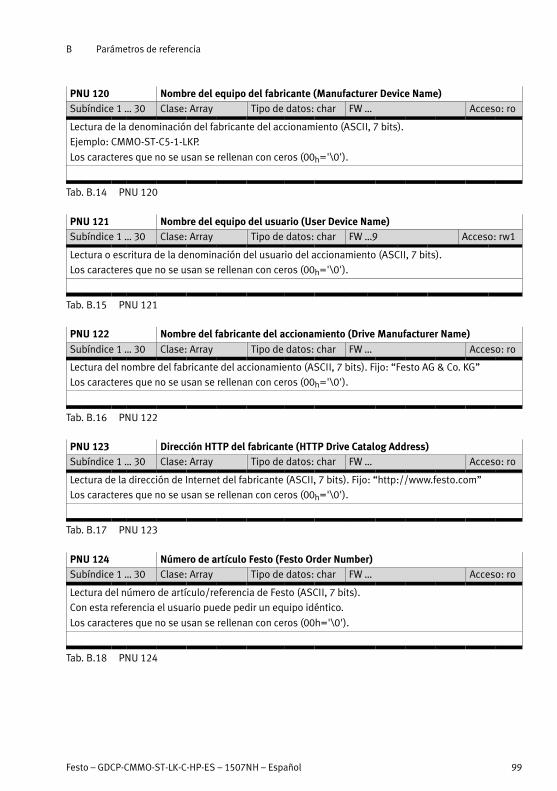
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 99
PNU 120 Nombre del equipo del fabricante (Manufacturer Device Name)Subíndice 1 … 30 Clase: Array Tipo de datos: char FW … Acceso: ro
Lectura de la denominación del fabricante del accionamiento (ASCII, 7 bits).
Ejemplo: CMMO-ST-C5-1-LKP.
Los caracteres que no se usan se rellenan con ceros (00h='\0').
Tab. B.14 PNU 120
PNU 121 Nombre del equipo del usuario (User Device Name)Subíndice 1 … 30 Clase: Array Tipo de datos: char FW …9 Acceso: rw1
Lectura o escritura de la denominación del usuario del accionamiento (ASCII, 7 bits).
Los caracteres que no se usan se rellenan con ceros (00h='\0').
Tab. B.15 PNU 121
PNU 122 Nombre del fabricante del accionamiento (Drive Manufacturer Name)
Subíndice 1 … 30 Clase: Array Tipo de datos: char FW … Acceso: ro
Lectura del nombre del fabricante del accionamiento (ASCII, 7 bits). Fijo: “Festo AG & Co. KG”
Los caracteres que no se usan se rellenan con ceros (00h='\0').
Tab. B.16 PNU 122
PNU 123 Dirección HTTP del fabricante (HTTP Drive Catalog Address)Subíndice 1 … 30 Clase: Array Tipo de datos: char FW … Acceso: ro
Lectura de la dirección de Internet del fabricante (ASCII, 7 bits). Fijo: “http://www.festo.com”
Los caracteres que no se usan se rellenan con ceros (00h='\0').
Tab. B.17 PNU 123
PNU 124 Número de artículo Festo (Festo Order Number)Subíndice 1 … 30 Clase: Array Tipo de datos: char FW … Acceso: ro
Lectura del número de artículo/referencia de Festo (ASCII, 7 bits).
Con esta referencia el usuario puede pedir un equipo idéntico.
Los caracteres que no se usan se rellenan con ceros (00h='\0').
Tab. B.18 PNU 124
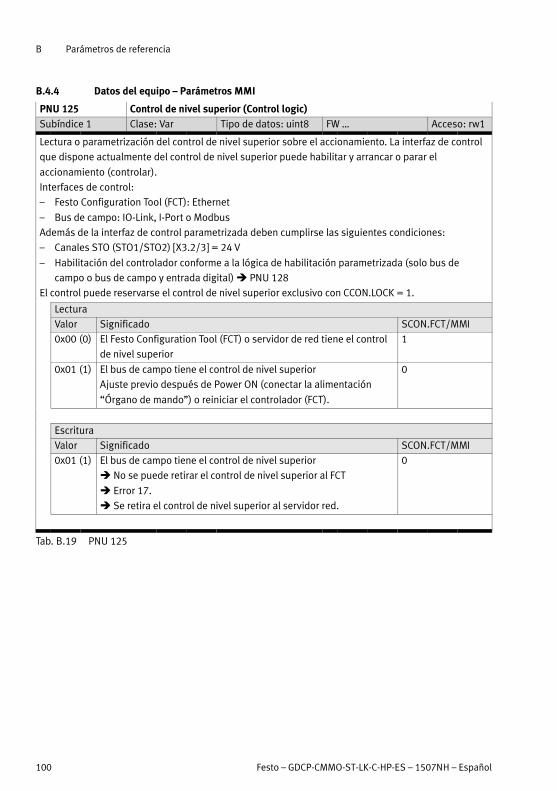
B Parámetros de referencia
100 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.4 Datos del equipo – Parámetros MMI
PNU 125 Control de nivel superior (Control logic)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización del control de nivel superior sobre el accionamiento. La interfaz de control
que dispone actualmente del control de nivel superior puede habilitar y arrancar o parar el
accionamiento (controlar).
Interfaces de control:
– Festo Configuration Tool (FCT): Ethernet
– Bus de campo: IO-Link, I-Port o Modbus
Además de la interfaz de control parametrizada deben cumplirse las siguientes condiciones:
– Canales STO (STO1/STO2) [X3.2/3] = 24 V
– Habilitación del controlador conforme a la lógica de habilitación parametrizada (solo bus de
campo o bus de campo y entrada digital) � PNU 128
El control puede reservarse el control de nivel superior exclusivo con CCON.LOCK = 1.
Lectura
Valor Significado SCON.FCT/MMI
0x00 (0) El Festo Configuration Tool (FCT) o servidor de red tiene el control
de nivel superior
1
0x01 (1) El bus de campo tiene el control de nivel superior
Ajuste previo después de Power ON (conectar la alimentación
“Órgano de mando”) o reiniciar el controlador (FCT).
0
Escritura
Valor Significado SCON.FCT/MMI
0x01 (1) El bus de campo tiene el control de nivel superior
� No se puede retirar el control de nivel superior al FCT
� Error 17.
� Se retira el control de nivel superior al servidor red.
0
Tab. B.19 PNU 125
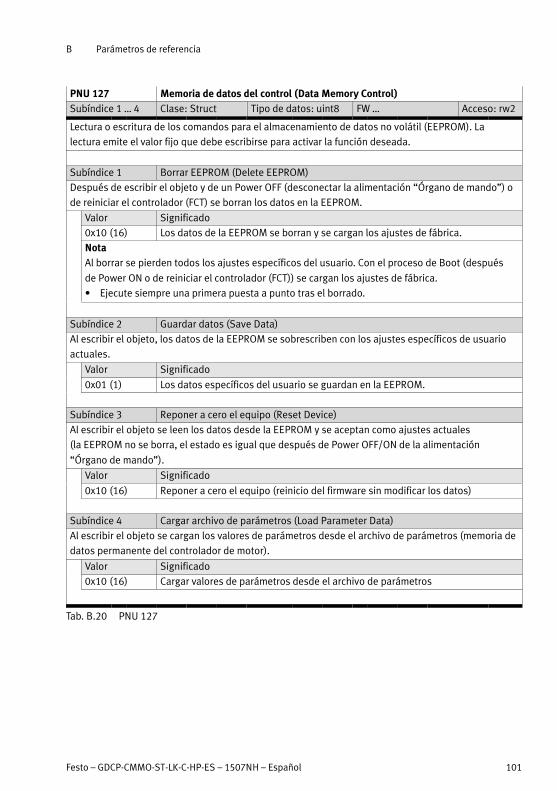
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 101
PNU 127 Memoria de datos del control (Data Memory Control)Subíndice 1 … 4 Clase: Struct Tipo de datos: uint8 FW … Acceso: rw2
Lectura o escritura de los comandos para el almacenamiento de datos no volátil (EEPROM). La
lectura emite el valor fijo que debe escribirse para activar la función deseada.
Subíndice 1 Borrar EEPROM (Delete EEPROM)
Después de escribir el objeto y de un Power OFF (desconectar la alimentación “Órgano de mando”) o
de reiniciar el controlador (FCT) se borran los datos en la EEPROM.
Valor Significado
0x10 (16) Los datos de la EEPROM se borran y se cargan los ajustes de fábrica.
NotaAl borrar se pierden todos los ajustes específicos del usuario. Con el proceso de Boot (después
de Power ON o de reiniciar el controlador (FCT)) se cargan los ajustes de fábrica.
� Ejecute siempre una primera puesta a punto tras el borrado.
Subíndice 2 Guardar datos (Save Data)
Al escribir el objeto, los datos de la EEPROM se sobrescriben con los ajustes específicos de usuario
actuales.
Valor Significado
0x01 (1) Los datos específicos del usuario se guardan en la EEPROM.
Subíndice 3 Reponer a cero el equipo (Reset Device)
Al escribir el objeto se leen los datos desde la EEPROM y se aceptan como ajustes actuales
(la EEPROM no se borra, el estado es igual que después de Power OFF/ON de la alimentación
“Órgano de mando”).
Valor Significado
0x10 (16) Reponer a cero el equipo (reinicio del firmware sin modificar los datos)
Subíndice 4 Cargar archivo de parámetros (Load Parameter Data)
Al escribir el objeto se cargan los valores de parámetros desde el archivo de parámetros (memoria de
datos permanente del controlador de motor).
Valor Significado
0x10 (16) Cargar valores de parámetros desde el archivo de parámetros
Tab. B.20 PNU 127
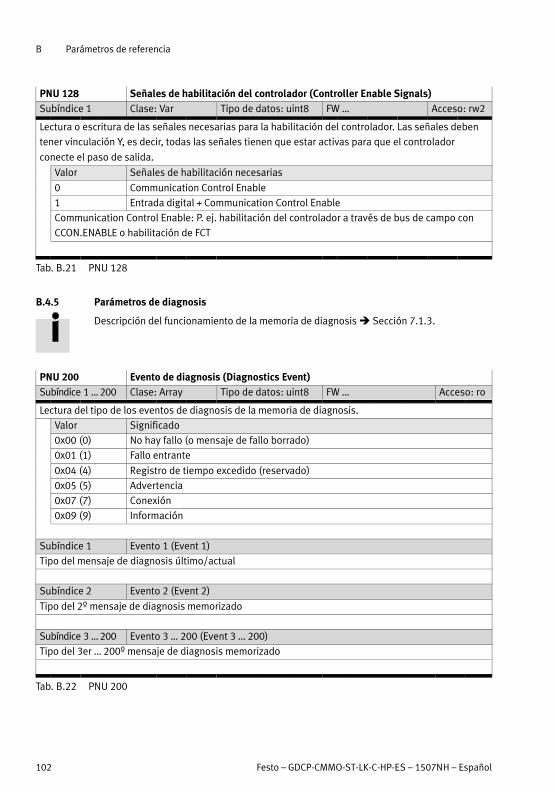
B Parámetros de referencia
102 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 128 Señales de habilitación del controlador (Controller Enable Signals)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: rw2
Lectura o escritura de las señales necesarias para la habilitación del controlador. Las señales deben
tener vinculación Y, es decir, todas las señales tienen que estar activas para que el controlador
conecte el paso de salida.
Valor Señales de habilitación necesarias
0 Communication Control Enable
1 Entrada digital + Communication Control Enable
Communication Control Enable: P. ej. habilitación del controlador a través de bus de campo con
CCON.ENABLE o habilitación de FCT
Tab. B.21 PNU 128
B.4.5 Parámetros de diagnosis
Descripción del funcionamiento de la memoria de diagnosis � Sección 7.1.3.
PNU 200 Evento de diagnosis (Diagnostics Event)Subíndice 1 … 200 Clase: Array Tipo de datos: uint8 FW … Acceso: ro
Lectura del tipo de los eventos de diagnosis de la memoria de diagnosis.
Valor Significado
0x00 (0) No hay fallo (o mensaje de fallo borrado)
0x01 (1) Fallo entrante
0x04 (4) Registro de tiempo excedido (reservado)
0x05 (5) Advertencia
0x07 (7) Conexión
0x09 (9) Información
Subíndice 1 Evento 1 (Event 1)
Tipo del mensaje de diagnosis último/actual
Subíndice 2 Evento 2 (Event 2)
Tipo del 2º mensaje de diagnosis memorizado
Subíndice 3 … 200 Evento 3 … 200 (Event 3 … 200)
Tipo del 3er … 200º mensaje de diagnosis memorizado
Tab. B.22 PNU 200
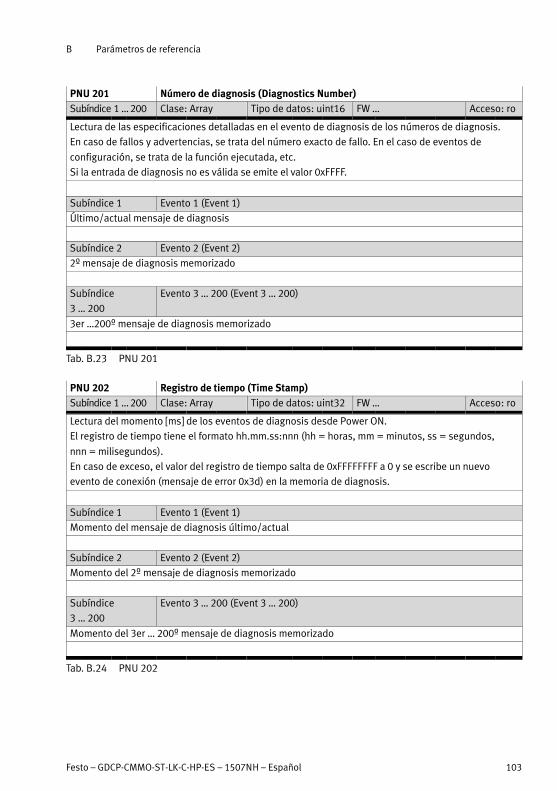
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 103
PNU 201 Número de diagnosis (Diagnostics Number)Subíndice 1 … 200 Clase: Array Tipo de datos: uint16 FW … Acceso: ro
Lectura de las especificaciones detalladas en el evento de diagnosis de los números de diagnosis.
En caso de fallos y advertencias, se trata del número exacto de fallo. En el caso de eventos de
configuración, se trata de la función ejecutada, etc.
Si la entrada de diagnosis no es válida se emite el valor 0xFFFF.
Subíndice 1 Evento 1 (Event 1)
Último/actual mensaje de diagnosis
Subíndice 2 Evento 2 (Event 2)
2º mensaje de diagnosis memorizado
Subíndice
3 … 200
Evento 3 … 200 (Event 3 … 200)
3er …200º mensaje de diagnosis memorizado
Tab. B.23 PNU 201
PNU 202 Registro de tiempo (Time Stamp)Subíndice 1 … 200 Clase: Array Tipo de datos: uint32 FW … Acceso: ro
Lectura del momento [ms] de los eventos de diagnosis desde Power ON.
El registro de tiempo tiene el formato hh.mm.ss:nnn (hh = horas, mm = minutos, ss = segundos,
nnn = milisegundos).
En caso de exceso, el valor del registro de tiempo salta de 0xFFFFFFFF a 0 y se escribe un nuevo
evento de conexión (mensaje de error 0x3d) en la memoria de diagnosis.
Subíndice 1 Evento 1 (Event 1)
Momento del mensaje de diagnosis último/actual
Subíndice 2 Evento 2 (Event 2)
Momento del 2º mensaje de diagnosis memorizado
Subíndice
3 … 200
Evento 3 … 200 (Event 3 … 200)
Momento del 3er … 200º mensaje de diagnosis memorizado
Tab. B.24 PNU 202
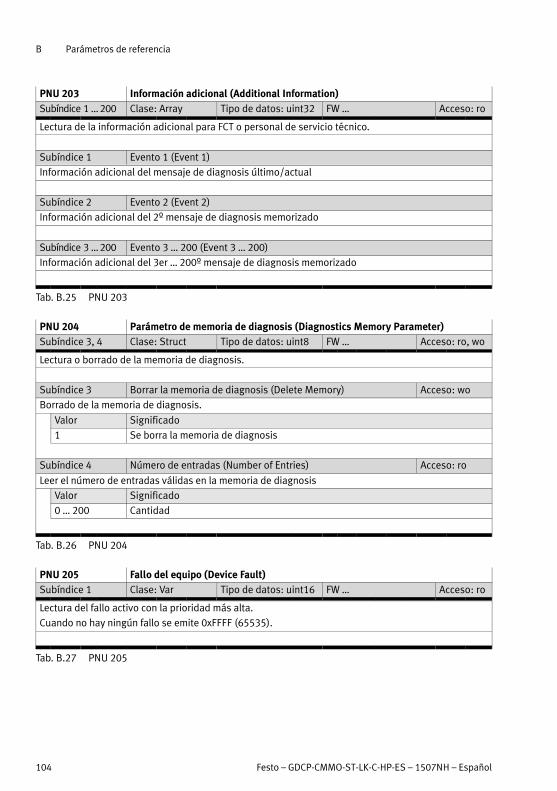
B Parámetros de referencia
104 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 203 Información adicional (Additional Information)Subíndice 1 … 200 Clase: Array Tipo de datos: uint32 FW … Acceso: ro
Lectura de la información adicional para FCT o personal de servicio técnico.
Subíndice 1 Evento 1 (Event 1)
Información adicional del mensaje de diagnosis último/actual
Subíndice 2 Evento 2 (Event 2)
Información adicional del 2º mensaje de diagnosis memorizado
Subíndice 3 … 200 Evento 3 … 200 (Event 3 … 200)
Información adicional del 3er … 200º mensaje de diagnosis memorizado
Tab. B.25 PNU 203
PNU 204 Parámetro de memoria de diagnosis (Diagnostics Memory Parameter)Subíndice 3, 4 Clase: Struct Tipo de datos: uint8 FW … Acceso: ro, wo
Lectura o borrado de la memoria de diagnosis.
Subíndice 3 Borrar la memoria de diagnosis (Delete Memory) Acceso: wo
Borrado de la memoria de diagnosis.
Valor Significado
1 Se borra la memoria de diagnosis
Subíndice 4 Número de entradas (Number of Entries) Acceso: ro
Leer el número de entradas válidas en la memoria de diagnosis
Valor Significado
0 … 200 Cantidad
Tab. B.26 PNU 204
PNU 205 Fallo del equipo (Device Fault)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: ro
Lectura del fallo activo con la prioridad más alta.
Cuando no hay ningún fallo se emite 0xFFFF (65535).
Tab. B.27 PNU 205
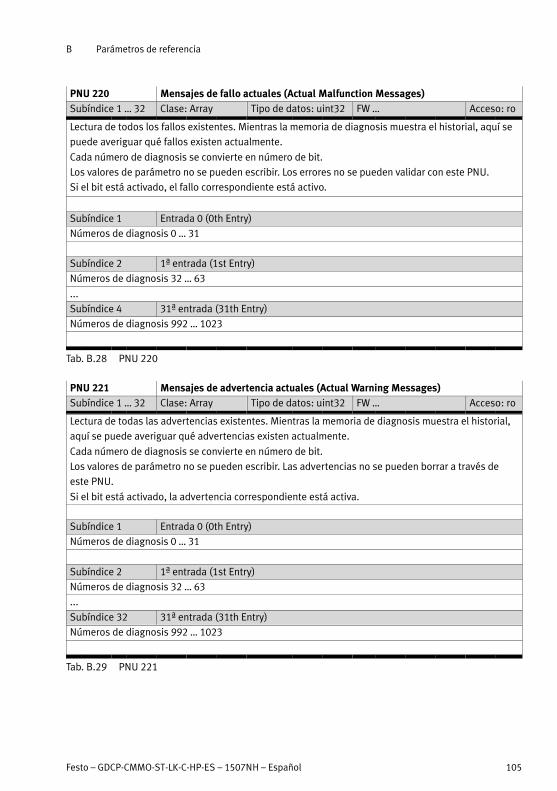
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 105
PNU 220 Mensajes de fallo actuales (Actual Malfunction Messages)Subíndice 1 … 32 Clase: Array Tipo de datos: uint32 FW … Acceso: ro
Lectura de todos los fallos existentes. Mientras la memoria de diagnosis muestra el historial, aquí se
puede averiguar qué fallos existen actualmente.
Cada número de diagnosis se convierte en número de bit.
Los valores de parámetro no se pueden escribir. Los errores no se pueden validar con este PNU.
Si el bit está activado, el fallo correspondiente está activo.
Subíndice 1 Entrada 0 (0th Entry)
Números de diagnosis 0 … 31
Subíndice 2 1ª entrada (1st Entry)
Números de diagnosis 32 … 63
...
Subíndice 4 31ª entrada (31th Entry)
Números de diagnosis 992 … 1023
Tab. B.28 PNU 220
PNU 221 Mensajes de advertencia actuales (Actual Warning Messages)Subíndice 1 … 32 Clase: Array Tipo de datos: uint32 FW … Acceso: ro
Lectura de todas las advertencias existentes. Mientras la memoria de diagnosis muestra el historial,
aquí se puede averiguar qué advertencias existen actualmente.
Cada número de diagnosis se convierte en número de bit.
Los valores de parámetro no se pueden escribir. Las advertencias no se pueden borrar a través de
este PNU.
Si el bit está activado, la advertencia correspondiente está activa.
Subíndice 1 Entrada 0 (0th Entry)
Números de diagnosis 0 … 31
Subíndice 2 1ª entrada (1st Entry)
Números de diagnosis 32 … 63
...
Subíndice 32 31ª entrada (31th Entry)
Números de diagnosis 992 … 1023
Tab. B.29 PNU 221
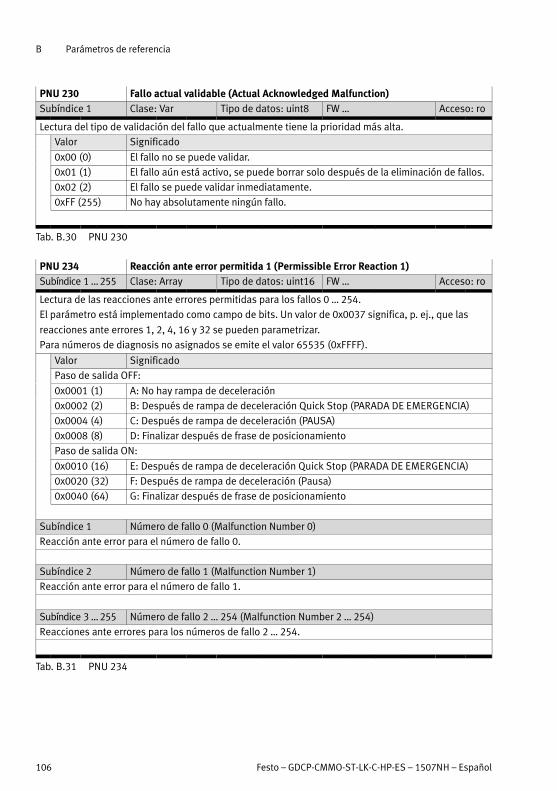
B Parámetros de referencia
106 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 230 Fallo actual validable (Actual Acknowledged Malfunction)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: ro
Lectura del tipo de validación del fallo que actualmente tiene la prioridad más alta.
Valor Significado
0x00 (0) El fallo no se puede validar.
0x01 (1) El fallo aún está activo, se puede borrar solo después de la eliminación de fallos.
0x02 (2) El fallo se puede validar inmediatamente.
0xFF (255) No hay absolutamente ningún fallo.
Tab. B.30 PNU 230
PNU 234 Reacción ante error permitida 1 (Permissible Error Reaction 1)Subíndice 1 … 255 Clase: Array Tipo de datos: uint16 FW … Acceso: ro
Lectura de las reacciones ante errores permitidas para los fallos 0 … 254.
El parámetro está implementado como campo de bits. Un valor de 0x0037 significa, p. ej., que las
reacciones ante errores 1, 2, 4, 16 y 32 se pueden parametrizar.
Para números de diagnosis no asignados se emite el valor 65535 (0xFFFF).
Valor Significado
Paso de salida OFF:
0x0001 (1) A: No hay rampa de deceleración
0x0002 (2) B: Después de rampa de deceleración Quick Stop (PARADA DE EMERGENCIA)
0x0004 (4) C: Después de rampa de deceleración (PAUSA)
0x0008 (8) D: Finalizar después de frase de posicionamiento
Paso de salida ON:
0x0010 (16) E: Después de rampa de deceleración Quick Stop (PARADA DE EMERGENCIA)
0x0020 (32) F: Después de rampa de deceleración (Pausa)
0x0040 (64) G: Finalizar después de frase de posicionamiento
Subíndice 1 Número de fallo 0 (Malfunction Number 0)
Reacción ante error para el número de fallo 0.
Subíndice 2 Número de fallo 1 (Malfunction Number 1)
Reacción ante error para el número de fallo 1.
Subíndice 3 … 255 Número de fallo 2 … 254 (Malfunction Number 2 … 254)
Reacciones ante errores para los números de fallo 2 … 254.
Tab. B.31 PNU 234
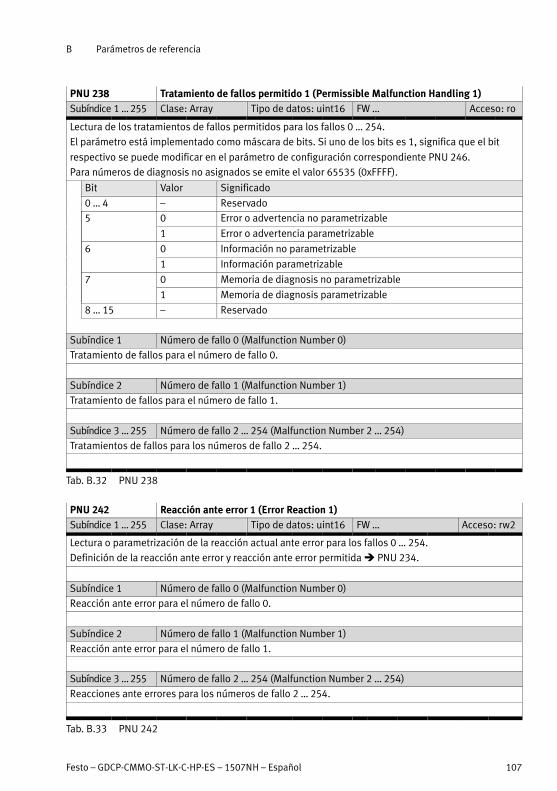
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 107
PNU 238 Tratamiento de fallos permitido 1 (Permissible Malfunction Handling 1)Subíndice 1 … 255 Clase: Array Tipo de datos: uint16 FW … Acceso: ro
Lectura de los tratamientos de fallos permitidos para los fallos 0 … 254.
El parámetro está implementado como máscara de bits. Si uno de los bits es 1, significa que el bit
respectivo se puede modificar en el parámetro de configuración correspondiente PNU 246.
Para números de diagnosis no asignados se emite el valor 65535 (0xFFFF).
Bit Valor Significado
0 … 4 – Reservado
5 0 Error o advertencia no parametrizable
1 Error o advertencia parametrizable
6 0 Información no parametrizable
1 Información parametrizable
7 0 Memoria de diagnosis no parametrizable
1 Memoria de diagnosis parametrizable
8 … 15 – Reservado
Subíndice 1 Número de fallo 0 (Malfunction Number 0)
Tratamiento de fallos para el número de fallo 0.
Subíndice 2 Número de fallo 1 (Malfunction Number 1)
Tratamiento de fallos para el número de fallo 1.
Subíndice 3 … 255 Número de fallo 2 … 254 (Malfunction Number 2 … 254)
Tratamientos de fallos para los números de fallo 2 … 254.
Tab. B.32 PNU 238
PNU 242 Reacción ante error 1 (Error Reaction 1)Subíndice 1 … 255 Clase: Array Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización de la reacción actual ante error para los fallos 0 … 254.
Definición de la reacción ante error y reacción ante error permitida � PNU 234.
Subíndice 1 Número de fallo 0 (Malfunction Number 0)
Reacción ante error para el número de fallo 0.
Subíndice 2 Número de fallo 1 (Malfunction Number 1)
Reacción ante error para el número de fallo 1.
Subíndice 3 … 255 Número de fallo 2 … 254 (Malfunction Number 2 … 254)
Reacciones ante errores para los números de fallo 2 … 254.
Tab. B.33 PNU 242
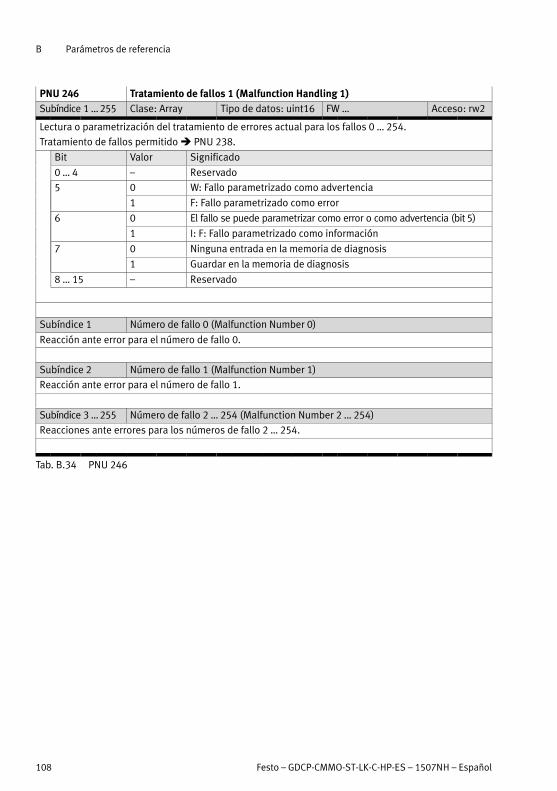
B Parámetros de referencia
108 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 246 Tratamiento de fallos 1 (Malfunction Handling 1)Subíndice 1 … 255 Clase: Array Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización del tratamiento de errores actual para los fallos 0 … 254.
Tratamiento de fallos permitido � PNU 238.
Bit Valor Significado
0 … 4 – Reservado
5 0 W: Fallo parametrizado como advertencia
1 F: Fallo parametrizado como error
6 0 El fallo se puede parametrizar como error o como advertencia (bit 5)
1 I: F: Fallo parametrizado como información
7 0 Ninguna entrada en la memoria de diagnosis
1 Guardar en la memoria de diagnosis
8 … 15 – Reservado
Subíndice 1 Número de fallo 0 (Malfunction Number 0)
Reacción ante error para el número de fallo 0.
Subíndice 2 Número de fallo 1 (Malfunction Number 1)
Reacción ante error para el número de fallo 1.
Subíndice 3 … 255 Número de fallo 2 … 254 (Malfunction Number 2 … 254)
Reacciones ante errores para los números de fallo 2 … 254.
Tab. B.34 PNU 246
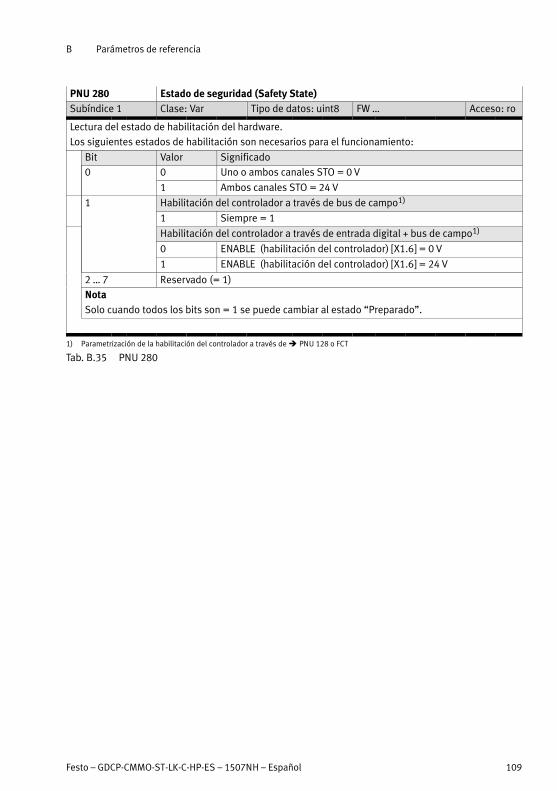
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 109
PNU 280 Estado de seguridad (Safety State)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: ro
Lectura del estado de habilitación del hardware.
Los siguientes estados de habilitación son necesarios para el funcionamiento:
Bit Valor Significado
0 0 Uno o ambos canales STO = 0 V
1 Ambos canales STO = 24 V
1 Habilitación del controlador a través de bus de campo1)
1 Siempre = 1
Habilitación del controlador a través de entrada digital + bus de campo1)
0 ENABLE (habilitación del controlador) [X1.6] = 0 V
1 ENABLE (habilitación del controlador) [X1.6] = 24 V
2 … 7 Reservado (= 1)
NotaSolo cuando todos los bits son = 1 se puede cambiar al estado “Preparado”.
1) Parametrización de la habilitación del controlador a través de � PNU 128 o FCT
Tab. B.35 PNU 280
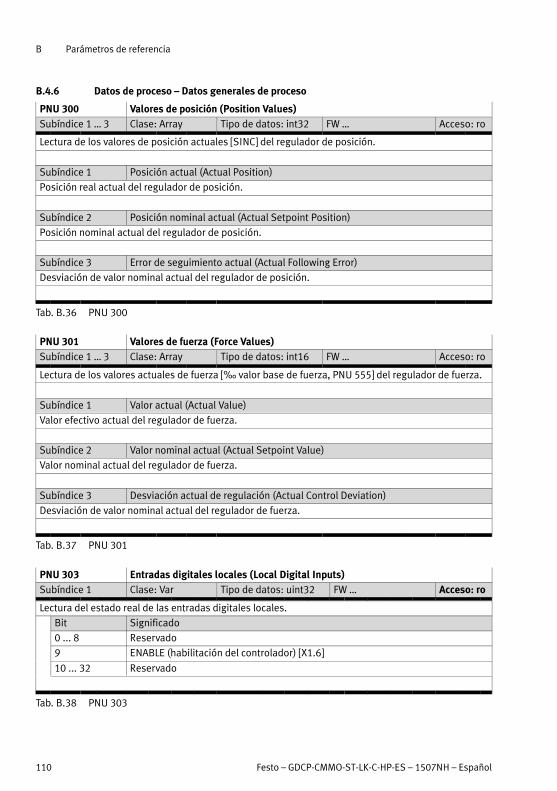
B Parámetros de referencia
110 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.6 Datos de proceso – Datos generales de proceso
PNU 300 Valores de posición (Position Values)Subíndice 1 … 3 Clase: Array Tipo de datos: int32 FW … Acceso: ro
Lectura de los valores de posición actuales [SINC] del regulador de posición.
Subíndice 1 Posición actual (Actual Position)
Posición real actual del regulador de posición.
Subíndice 2 Posición nominal actual (Actual Setpoint Position)
Posición nominal actual del regulador de posición.
Subíndice 3 Error de seguimiento actual (Actual Following Error)
Desviación de valor nominal actual del regulador de posición.
Tab. B.36 PNU 300
PNU 301 Valores de fuerza (Force Values)Subíndice 1 … 3 Clase: Array Tipo de datos: int16 FW … Acceso: ro
Lectura de los valores actuales de fuerza [‰ valor base de fuerza, PNU 555] del regulador de fuerza.
Subíndice 1 Valor actual (Actual Value)
Valor efectivo actual del regulador de fuerza.
Subíndice 2 Valor nominal actual (Actual Setpoint Value)
Valor nominal actual del regulador de fuerza.
Subíndice 3 Desviación actual de regulación (Actual Control Deviation)
Desviación de valor nominal actual del regulador de fuerza.
Tab. B.37 PNU 301
PNU 303 Entradas digitales locales (Local Digital Inputs)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: ro
Lectura del estado real de las entradas digitales locales.
Bit Significado
0 ... 8 Reservado
9 ENABLE (habilitación del controlador) [X1.6]
10 ... 32 Reservado
Tab. B.38 PNU 303
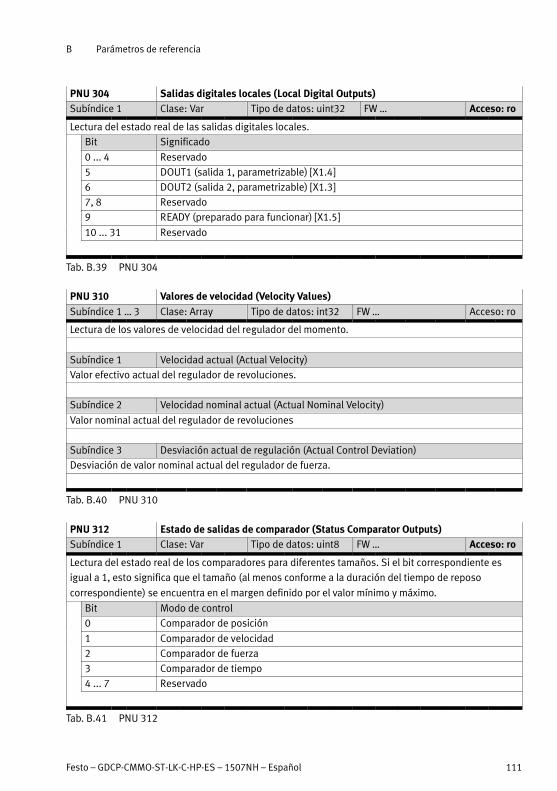
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 111
PNU 304 Salidas digitales locales (Local Digital Outputs)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: ro
Lectura del estado real de las salidas digitales locales.
Bit Significado
0 ... 4 Reservado
5 DOUT1 (salida 1, parametrizable) [X1.4]
6 DOUT2 (salida 2, parametrizable) [X1.3]
7, 8 Reservado
9 READY (preparado para funcionar) [X1.5]
10 ... 31 Reservado
Tab. B.39 PNU 304
PNU 310 Valores de velocidad (Velocity Values)
Subíndice 1 … 3 Clase: Array Tipo de datos: int32 FW … Acceso: ro
Lectura de los valores de velocidad del regulador del momento.
Subíndice 1 Velocidad actual (Actual Velocity)
Valor efectivo actual del regulador de revoluciones.
Subíndice 2 Velocidad nominal actual (Actual Nominal Velocity)
Valor nominal actual del regulador de revoluciones
Subíndice 3 Desviación actual de regulación (Actual Control Deviation)
Desviación de valor nominal actual del regulador de fuerza.
Tab. B.40 PNU 310
PNU 312 Estado de salidas de comparador (Status Comparator Outputs)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: ro
Lectura del estado real de los comparadores para diferentes tamaños. Si el bit correspondiente es
igual a 1, esto significa que el tamaño (al menos conforme a la duración del tiempo de reposo
correspondiente) se encuentra en el margen definido por el valor mínimo y máximo.
Bit Modo de control
0 Comparador de posición
1 Comparador de velocidad
2 Comparador de fuerza
3 Comparador de tiempo
4 ... 7 Reservado
Tab. B.41 PNU 312
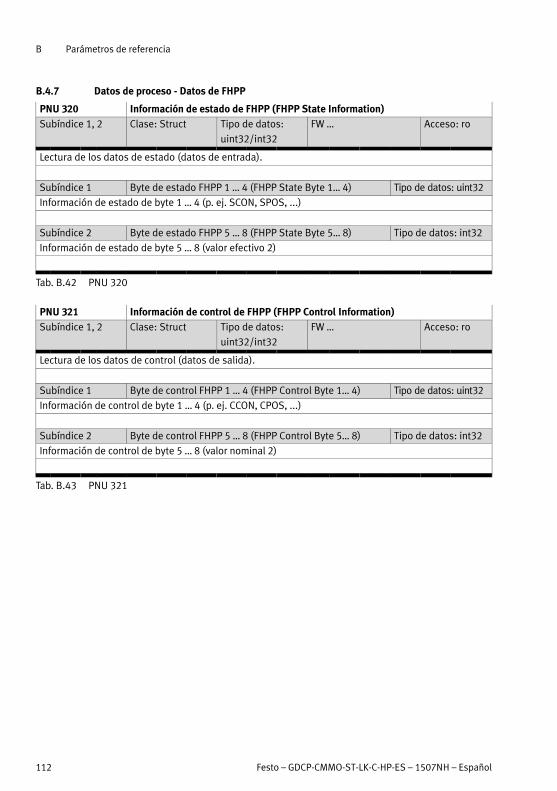
B Parámetros de referencia
112 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.7 Datos de proceso - Datos de FHPP
PNU 320 Información de estado de FHPP (FHPP State Information)Subíndice 1, 2 Clase: Struct Tipo de datos:
uint32/int32
FW … Acceso: ro
Lectura de los datos de estado (datos de entrada).
Subíndice 1 Byte de estado FHPP 1 … 4 (FHPP State Byte 1… 4) Tipo de datos: uint32
Información de estado de byte 1 … 4 (p. ej. SCON, SPOS, ...)
Subíndice 2 Byte de estado FHPP 5 … 8 (FHPP State Byte 5… 8) Tipo de datos: int32
Información de estado de byte 5 … 8 (valor efectivo 2)
Tab. B.42 PNU 320
PNU 321 Información de control de FHPP (FHPP Control Information)Subíndice 1, 2 Clase: Struct Tipo de datos:
uint32/int32
FW … Acceso: ro
Lectura de los datos de control (datos de salida).
Subíndice 1 Byte de control FHPP 1 … 4 (FHPP Control Byte 1… 4) Tipo de datos: uint32
Información de control de byte 1 … 4 (p. ej. CCON, CPOS, ...)
Subíndice 2 Byte de control FHPP 5 … 8 (FHPP Control Byte 5… 8) Tipo de datos: int32
Información de control de byte 5 … 8 (valor nominal 2)
Tab. B.43 PNU 321
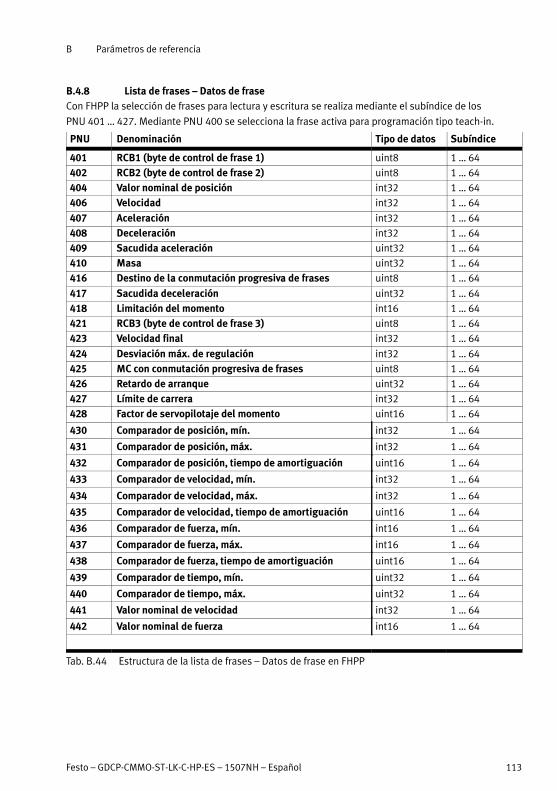
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 113
B.4.8 Lista de frases – Datos de fraseCon FHPP la selección de frases para lectura y escritura se realiza mediante el subíndice de los
PNU 401 … 427. Mediante PNU 400 se selecciona la frase activa para programación tipo teach-in.
PNU Denominación Tipo de datos Subíndice
401 RCB1 (byte de control de frase 1) uint8 1 … 64
402 RCB2 (byte de control de frase 2) uint8 1 … 64
404 Valor nominal de posición int32 1 … 64
406 Velocidad int32 1 … 64
407 Aceleración int32 1 … 64
408 Deceleración int32 1 … 64
409 Sacudida aceleración uint32 1 … 64
410 Masa uint32 1 … 64
416 Destino de la conmutación progresiva de frases uint8 1 … 64
417 Sacudida deceleración uint32 1 … 64
418 Limitación del momento int16 1 … 64
421 RCB3 (byte de control de frase 3) uint8 1 … 64
423 Velocidad final int32 1 … 64
424 Desviación máx. de regulación int32 1 … 64
425 MC con conmutación progresiva de frases uint8 1 … 64
426 Retardo de arranque uint32 1 … 64
427 Límite de carrera int32 1 … 64
428 Factor de servopilotaje del momento uint16 1 … 64
430 Comparador de posición, mín. int32 1 … 64
431 Comparador de posición, máx. int32 1 … 64
432 Comparador de posición, tiempo de amortiguación uint16 1 … 64
433 Comparador de velocidad, mín. int32 1 … 64
434 Comparador de velocidad, máx. int32 1 … 64
435 Comparador de velocidad, tiempo de amortiguación uint16 1 … 64
436 Comparador de fuerza, mín. int16 1 … 64
437 Comparador de fuerza, máx. int16 1 … 64
438 Comparador de fuerza, tiempo de amortiguación uint16 1 … 64
439 Comparador de tiempo, mín. uint32 1 … 64
440 Comparador de tiempo, máx. uint32 1 … 64
441 Valor nominal de velocidad int32 1 … 64
442 Valor nominal de fuerza int16 1 … 64
Tab. B.44 Estructura de la lista de frases – Datos de frase en FHPP
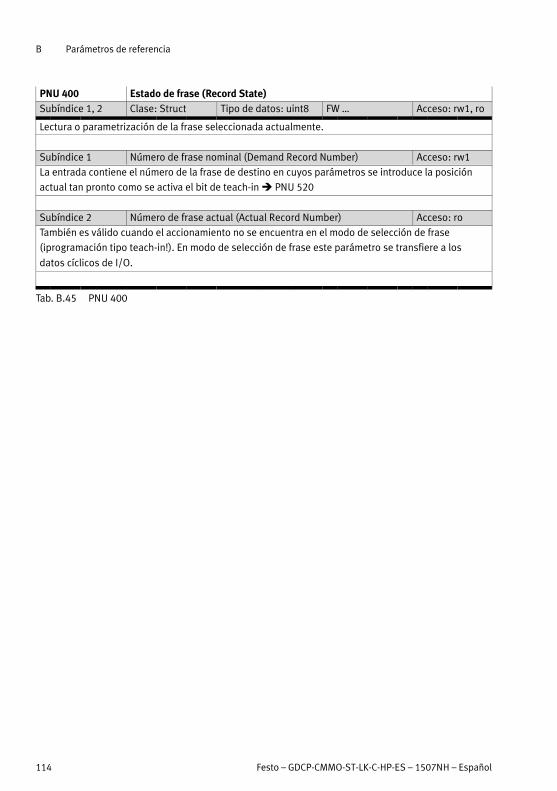
B Parámetros de referencia
114 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 400 Estado de frase (Record State)Subíndice 1, 2 Clase: Struct Tipo de datos: uint8 FW … Acceso: rw1, ro
Lectura o parametrización de la frase seleccionada actualmente.
Subíndice 1 Número de frase nominal (Demand Record Number) Acceso: rw1
La entrada contiene el número de la frase de destino en cuyos parámetros se introduce la posición
actual tan pronto como se activa el bit de teach-in � PNU 520
Subíndice 2 Número de frase actual (Actual Record Number) Acceso: ro
También es válido cuando el accionamiento no se encuentra en el modo de selección de frase
(¡programación tipo teach-in!). En modo de selección de frase este parámetro se transfiere a los
datos cíclicos de I/O.
Tab. B.45 PNU 400
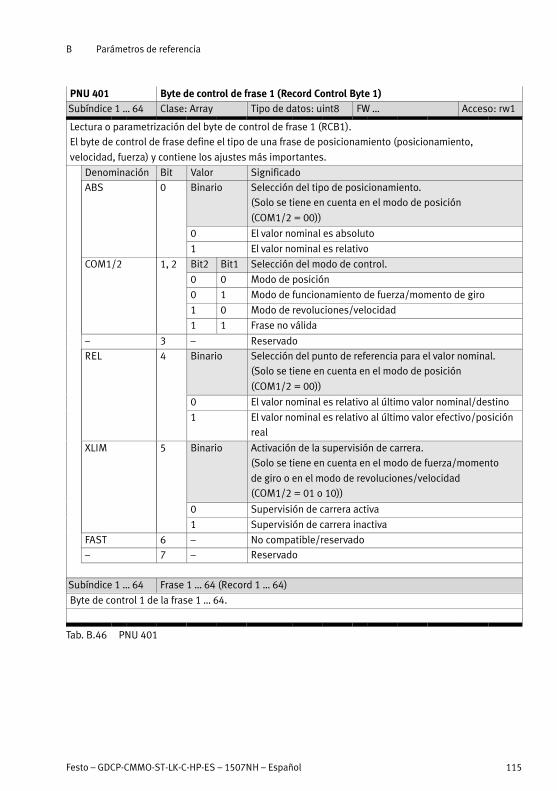
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 115
PNU 401 Byte de control de frase 1 (Record Control Byte 1)Subíndice 1 … 64 Clase: Array Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización del byte de control de frase 1 (RCB1).
El byte de control de frase define el tipo de una frase de posicionamiento (posicionamiento,
velocidad, fuerza) y contiene los ajustes más importantes.
Denominación Bit Valor Significado
ABS 0 Binario Selección del tipo de posicionamiento.
(Solo se tiene en cuenta en el modo de posición
(COM1/2 = 00))
0 El valor nominal es absoluto
1 El valor nominal es relativo
COM1/2 1, 2 Bit2 Bit1 Selección del modo de control.
0 0 Modo de posición
0 1 Modo de funcionamiento de fuerza/momento de giro
1 0 Modo de revoluciones/velocidad
1 1 Frase no válida
– 3 – Reservado
REL 4 Binario Selección del punto de referencia para el valor nominal.
(Solo se tiene en cuenta en el modo de posición
(COM1/2 = 00))
0 El valor nominal es relativo al último valor nominal/destino
1 El valor nominal es relativo al último valor efectivo/posición
real
XLIM 5 Binario Activación de la supervisión de carrera.
(Solo se tiene en cuenta en el modo de fuerza/momento
de giro o en el modo de revoluciones/velocidad
(COM1/2 = 01 o 10))
0 Supervisión de carrera activa
1 Supervisión de carrera inactiva
FAST 6 – No compatible/reservado
– 7 – Reservado
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Byte de control 1 de la frase 1 … 64.
Tab. B.46 PNU 401
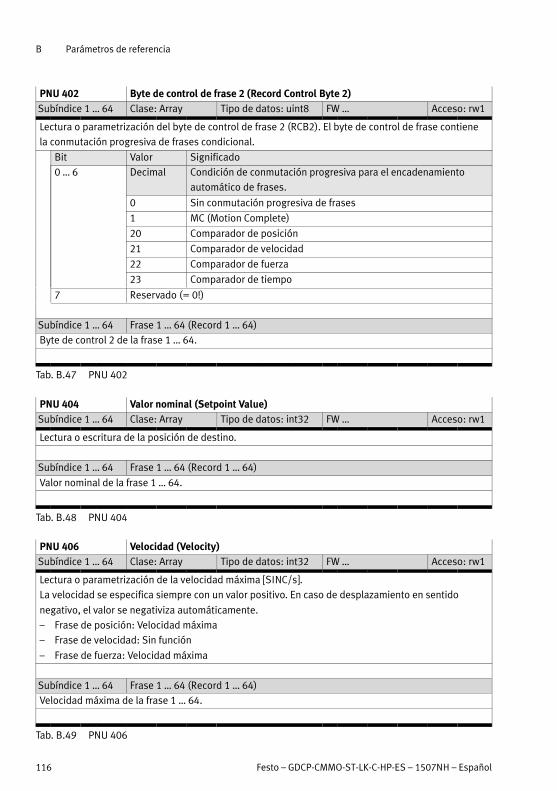
B Parámetros de referencia
116 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 402 Byte de control de frase 2 (Record Control Byte 2)Subíndice 1 … 64 Clase: Array Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización del byte de control de frase 2 (RCB2). El byte de control de frase contiene
la conmutación progresiva de frases condicional.
Bit Valor Significado
0 … 6 Decimal Condición de conmutación progresiva para el encadenamiento
automático de frases.
0 Sin conmutación progresiva de frases
1 MC (Motion Complete)
20 Comparador de posición
21 Comparador de velocidad
22 Comparador de fuerza
23 Comparador de tiempo
7 Reservado (= 0!)
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Byte de control 2 de la frase 1 … 64.
Tab. B.47 PNU 402
PNU 404 Valor nominal (Setpoint Value)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o escritura de la posición de destino.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Valor nominal de la frase 1 … 64.
Tab. B.48 PNU 404
PNU 406 Velocidad (Velocity)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la velocidad máxima [SINC/s].
La velocidad se especifica siempre con un valor positivo. En caso de desplazamiento en sentido
negativo, el valor se negativiza automáticamente.
– Frase de posición: Velocidad máxima
– Frase de velocidad: Sin función
– Frase de fuerza: Velocidad máxima
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Velocidad máxima de la frase 1 … 64.
Tab. B.49 PNU 406
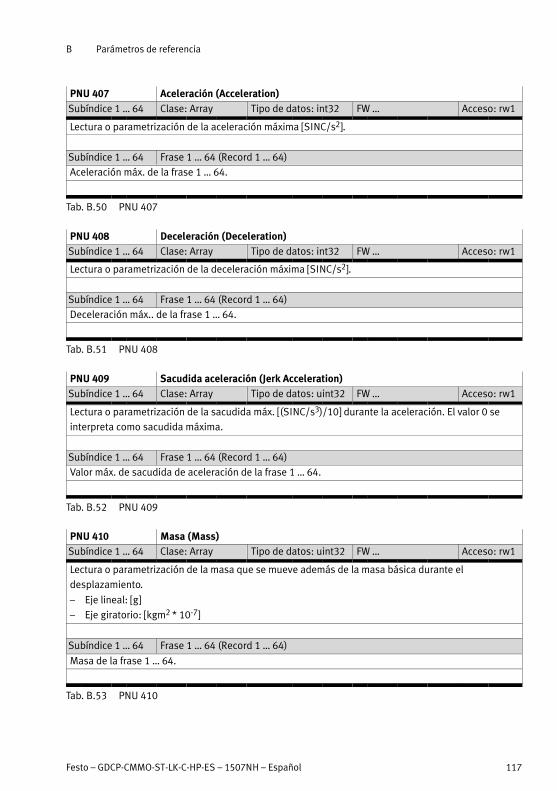
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 117
PNU 407 Aceleración (Acceleration)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la aceleración máxima [SINC/s2].
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Aceleración máx. de la frase 1 … 64.
Tab. B.50 PNU 407
PNU 408 Deceleración (Deceleration)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la deceleración máxima [SINC/s2].
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Deceleración máx.. de la frase 1 … 64.
Tab. B.51 PNU 408
PNU 409 Sacudida aceleración (Jerk Acceleration)Subíndice 1 … 64 Clase: Array Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de la sacudida máx. [(SINC/s3)/10] durante la aceleración. El valor 0 se
interpreta como sacudida máxima.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Valor máx. de sacudida de aceleración de la frase 1 … 64.
Tab. B.52 PNU 409
PNU 410 Masa (Mass)Subíndice 1 … 64 Clase: Array Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de la masa que se mueve además de la masa básica durante el
desplazamiento.
– Eje lineal: [g]
– Eje giratorio: [kgm2 * 10-7]
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Masa de la frase 1 … 64.
Tab. B.53 PNU 410
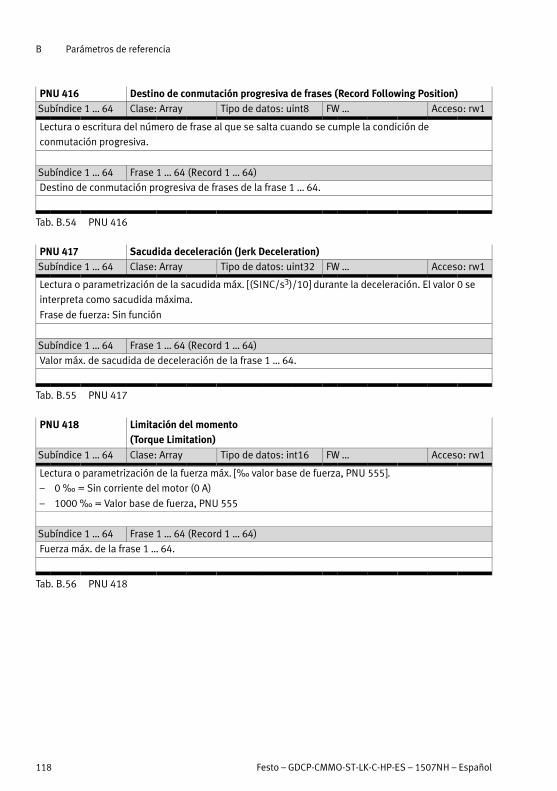
B Parámetros de referencia
118 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 416 Destino de conmutación progresiva de frases (Record Following Position)Subíndice 1 … 64 Clase: Array Tipo de datos: uint8 FW … Acceso: rw1
Lectura o escritura del número de frase al que se salta cuando se cumple la condición de
conmutación progresiva.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Destino de conmutación progresiva de frases de la frase 1 … 64.
Tab. B.54 PNU 416
PNU 417 Sacudida deceleración (Jerk Deceleration)Subíndice 1 … 64 Clase: Array Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de la sacudida máx. [(SINC/s3)/10] durante la deceleración. El valor 0 se
interpreta como sacudida máxima.
Frase de fuerza: Sin función
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Valor máx. de sacudida de deceleración de la frase 1 … 64.
Tab. B.55 PNU 417
PNU 418 Limitación del momento (Torque Limitation)
Subíndice 1 … 64 Clase: Array Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización de la fuerza máx. [‰ valor base de fuerza, PNU 555].
– 0 ‰ = Sin corriente del motor (0 A)
– 1000 ‰ = Valor base de fuerza, PNU 555
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Fuerza máx. de la frase 1 … 64.
Tab. B.56 PNU 418
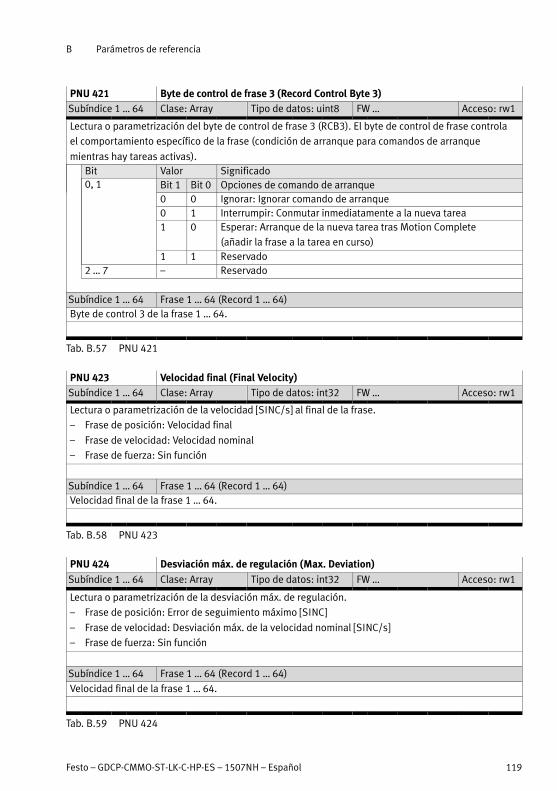
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 119
PNU 421 Byte de control de frase 3 (Record Control Byte 3)Subíndice 1 … 64 Clase: Array Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización del byte de control de frase 3 (RCB3). El byte de control de frase controla
el comportamiento específico de la frase (condición de arranque para comandos de arranque
mientras hay tareas activas).Bit Valor Significado0, 1 Bit 1 Bit 0 Opciones de comando de arranque
0 0 Ignorar: Ignorar comando de arranque0 1 Interrumpir: Conmutar inmediatamente a la nueva tarea1 0 Esperar: Arranque de la nueva tarea tras Motion Complete
(añadir la frase a la tarea en curso)1 1 Reservado
2 … 7 – Reservado
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)Byte de control 3 de la frase 1 … 64.
Tab. B.57 PNU 421
PNU 423 Velocidad final (Final Velocity)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la velocidad [SINC/s] al final de la frase.
– Frase de posición: Velocidad final
– Frase de velocidad: Velocidad nominal
– Frase de fuerza: Sin función
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)Velocidad final de la frase 1 … 64.
Tab. B.58 PNU 423
PNU 424 Desviación máx. de regulación (Max. Deviation)
Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la desviación máx. de regulación.
– Frase de posición: Error de seguimiento máximo [SINC]
– Frase de velocidad: Desviación máx. de la velocidad nominal [SINC/s]
– Frase de fuerza: Sin función
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Velocidad final de la frase 1 … 64.
Tab. B.59 PNU 424
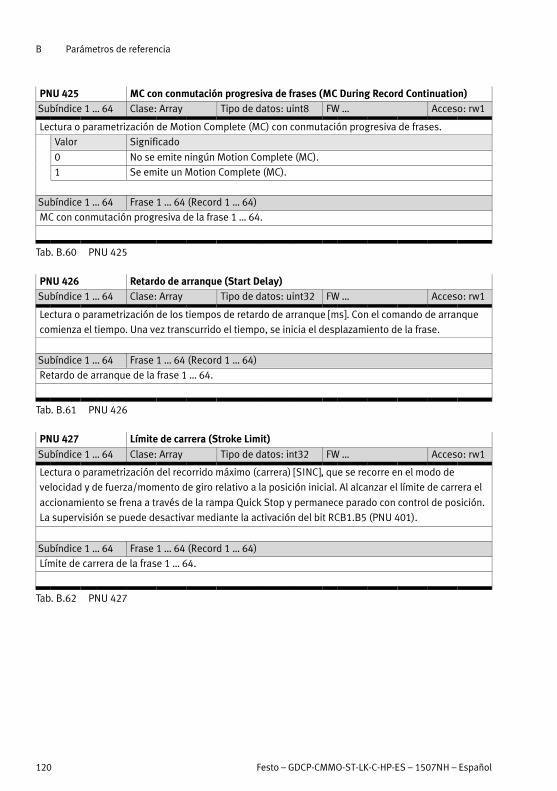
B Parámetros de referencia
120 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 425 MC con conmutación progresiva de frases (MC During Record Continuation)Subíndice 1 … 64 Clase: Array Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización de Motion Complete (MC) con conmutación progresiva de frases.
Valor Significado
0 No se emite ningún Motion Complete (MC).
1 Se emite un Motion Complete (MC).
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
MC con conmutación progresiva de la frase 1 … 64.
Tab. B.60 PNU 425
PNU 426 Retardo de arranque (Start Delay)Subíndice 1 … 64 Clase: Array Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de los tiempos de retardo de arranque [ms]. Con el comando de arranque
comienza el tiempo. Una vez transcurrido el tiempo, se inicia el desplazamiento de la frase.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Retardo de arranque de la frase 1 … 64.
Tab. B.61 PNU 426
PNU 427 Límite de carrera (Stroke Limit)
Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del recorrido máximo (carrera) [SINC], que se recorre en el modo de
velocidad y de fuerza/momento de giro relativo a la posición inicial. Al alcanzar el límite de carrera el
accionamiento se frena a través de la rampa Quick Stop y permanece parado con control de posición.
La supervisión se puede desactivar mediante la activación del bit RCB1.B5 (PNU 401).
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Límite de carrera de la frase 1 … 64.
Tab. B.62 PNU 427
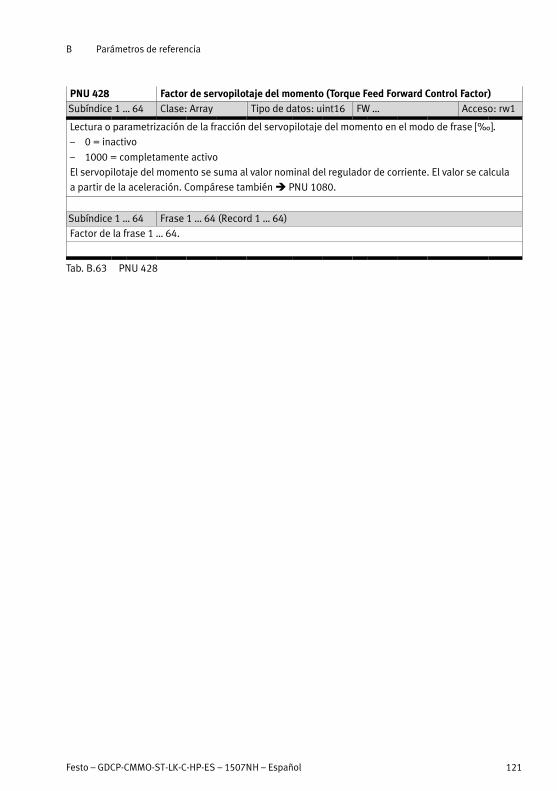
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 121
PNU 428 Factor de servopilotaje del momento (Torque Feed Forward Control Factor)Subíndice 1 … 64 Clase: Array Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización de la fracción del servopilotaje del momento en el modo de frase [‰].
– 0 = inactivo
– 1000 = completamente activo
El servopilotaje del momento se suma al valor nominal del regulador de corriente. El valor se calcula
a partir de la aceleración. Compárese también � PNU 1080.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Factor de la frase 1 … 64.
Tab. B.63 PNU 428
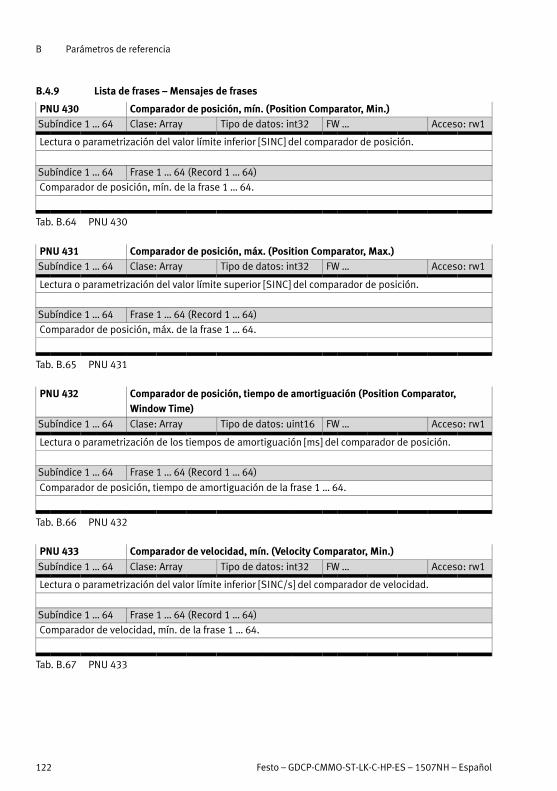
B Parámetros de referencia
122 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.9 Lista de frases – Mensajes de frases
PNU 430 Comparador de posición, mín. (Position Comparator, Min.)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [SINC] del comparador de posición.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de posición, mín. de la frase 1 … 64.
Tab. B.64 PNU 430
PNU 431 Comparador de posición, máx. (Position Comparator, Max.)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [SINC] del comparador de posición.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de posición, máx. de la frase 1 … 64.
Tab. B.65 PNU 431
PNU 432 Comparador de posición, tiempo de amortiguación (Position Comparator,Window Time)
Subíndice 1 … 64 Clase: Array Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización de los tiempos de amortiguación [ms] del comparador de posición.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de posición, tiempo de amortiguación de la frase 1 … 64.
Tab. B.66 PNU 432
PNU 433 Comparador de velocidad, mín. (Velocity Comparator, Min.)
Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [SINC/s] del comparador de velocidad.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de velocidad, mín. de la frase 1 … 64.
Tab. B.67 PNU 433
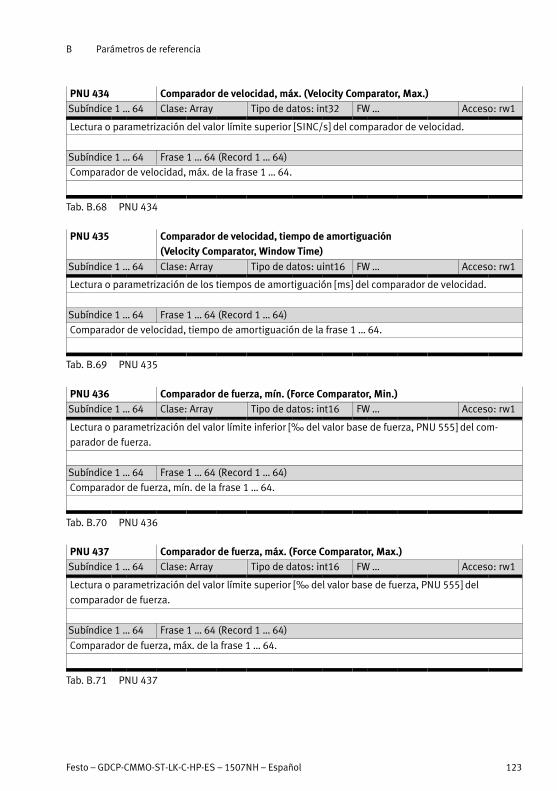
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 123
PNU 434 Comparador de velocidad, máx. (Velocity Comparator, Max.)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [SINC/s] del comparador de velocidad.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de velocidad, máx. de la frase 1 … 64.
Tab. B.68 PNU 434
PNU 435 Comparador de velocidad, tiempo de amortiguación (Velocity Comparator, Window Time)
Subíndice 1 … 64 Clase: Array Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización de los tiempos de amortiguación [ms] del comparador de velocidad.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de velocidad, tiempo de amortiguación de la frase 1 … 64.
Tab. B.69 PNU 435
PNU 436 Comparador de fuerza, mín. (Force Comparator, Min.)Subíndice 1 … 64 Clase: Array Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [‰ del valor base de fuerza, PNU 555] del com
parador de fuerza.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de fuerza, mín. de la frase 1 … 64.
Tab. B.70 PNU 436
PNU 437 Comparador de fuerza, máx. (Force Comparator, Max.)Subíndice 1 … 64 Clase: Array Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [‰ del valor base de fuerza, PNU 555] del
comparador de fuerza.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de fuerza, máx. de la frase 1 … 64.
Tab. B.71 PNU 437
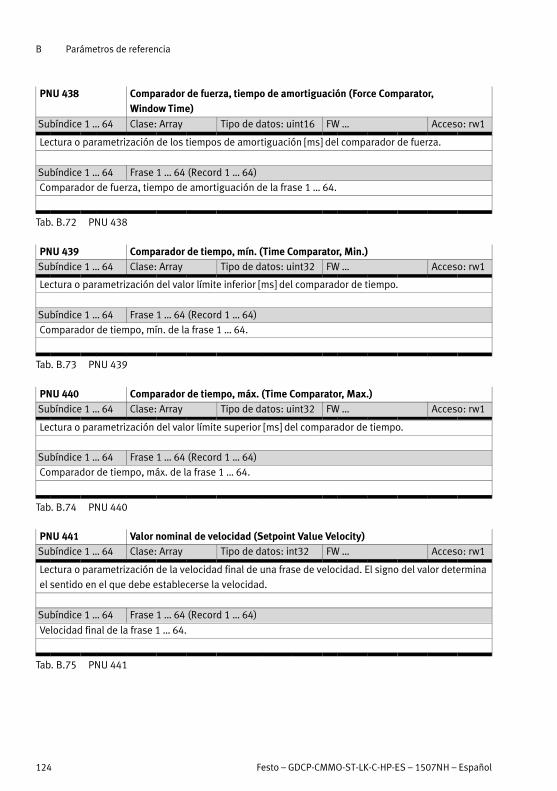
B Parámetros de referencia
124 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 438 Comparador de fuerza, tiempo de amortiguación (Force Comparator,Window Time)
Subíndice 1 … 64 Clase: Array Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización de los tiempos de amortiguación [ms] del comparador de fuerza.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de fuerza, tiempo de amortiguación de la frase 1 … 64.
Tab. B.72 PNU 438
PNU 439 Comparador de tiempo, mín. (Time Comparator, Min.)Subíndice 1 … 64 Clase: Array Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [ms] del comparador de tiempo.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de tiempo, mín. de la frase 1 … 64.
Tab. B.73 PNU 439
PNU 440 Comparador de tiempo, máx. (Time Comparator, Max.)Subíndice 1 … 64 Clase: Array Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [ms] del comparador de tiempo.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Comparador de tiempo, máx. de la frase 1 … 64.
Tab. B.74 PNU 440
PNU 441 Valor nominal de velocidad (Setpoint Value Velocity)Subíndice 1 … 64 Clase: Array Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la velocidad final de una frase de velocidad. El signo del valor determina
el sentido en el que debe establecerse la velocidad.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Velocidad final de la frase 1 … 64.
Tab. B.75 PNU 441
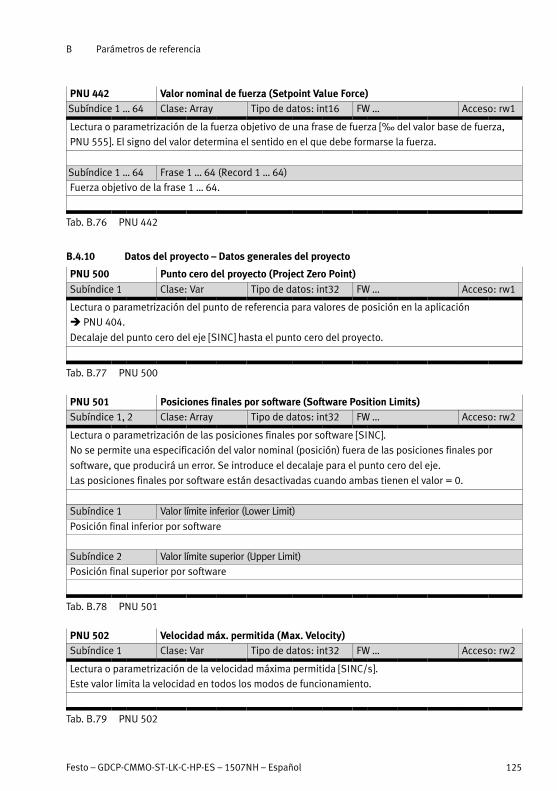
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 125
PNU 442 Valor nominal de fuerza (Setpoint Value Force)Subíndice 1 … 64 Clase: Array Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización de la fuerza objetivo de una frase de fuerza [‰ del valor base de fuerza,
PNU 555]. El signo del valor determina el sentido en el que debe formarse la fuerza.
Subíndice 1 … 64 Frase 1 … 64 (Record 1 … 64)
Fuerza objetivo de la frase 1 … 64.
Tab. B.76 PNU 442
B.4.10 Datos del proyecto – Datos generales del proyecto
PNU 500 Punto cero del proyecto (Project Zero Point)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del punto de referencia para valores de posición en la aplicación
� PNU 404.
Decalaje del punto cero del eje [SINC] hasta el punto cero del proyecto.
Tab. B.77 PNU 500
PNU 501 Posiciones finales por software (Software Position Limits)Subíndice 1, 2 Clase: Array Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de las posiciones finales por software [SINC].
No se permite una especificación del valor nominal (posición) fuera de las posiciones finales por
software, que producirá un error. Se introduce el decalaje para el punto cero del eje.
Las posiciones finales por software están desactivadas cuando ambas tienen el valor = 0.
Subíndice 1 Valor límite inferior (Lower Limit)
Posición final inferior por software
Subíndice 2 Valor límite superior (Upper Limit)
Posición final superior por software
Tab. B.78 PNU 501
PNU 502 Velocidad máx. permitida (Max. Velocity)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la velocidad máxima permitida [SINC/s].
Este valor limita la velocidad en todos los modos de funcionamiento.
Tab. B.79 PNU 502
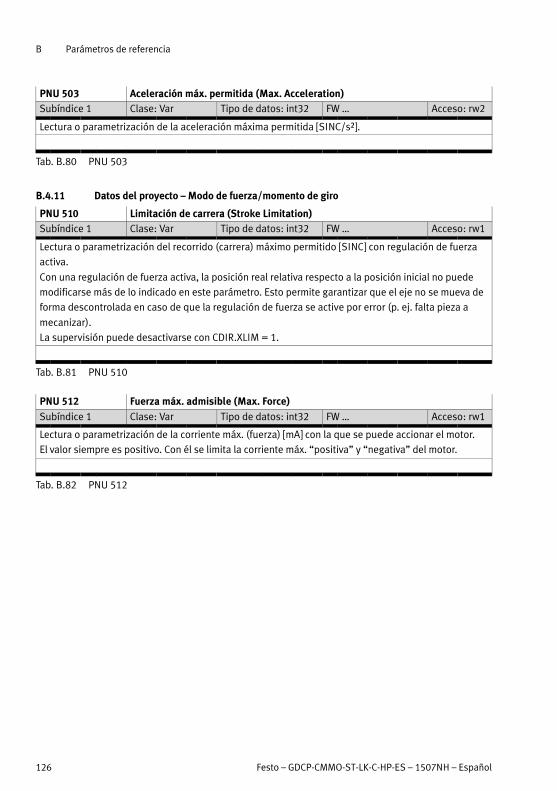
B Parámetros de referencia
126 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 503 Aceleración máx. permitida (Max. Acceleration)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la aceleración máxima permitida [SINC/s²].
Tab. B.80 PNU 503
B.4.11 Datos del proyecto – Modo de fuerza/momento de giro
PNU 510 Limitación de carrera (Stroke Limitation)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del recorrido (carrera) máximo permitido [SINC] con regulación de fuerza
activa.
Con una regulación de fuerza activa, la posición real relativa respecto a la posición inicial no puede
modificarse más de lo indicado en este parámetro. Esto permite garantizar que el eje no se mueva de
forma descontrolada en caso de que la regulación de fuerza se active por error (p. ej. falta pieza a
mecanizar).
La supervisión puede desactivarse con CDIR.XLIM = 1.
Tab. B.81 PNU 510
PNU 512 Fuerza máx. admisible (Max. Force)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la corriente máx. (fuerza) [mA] con la que se puede accionar el motor.
El valor siempre es positivo. Con él se limita la corriente máx. “positiva” y “negativa” del motor.
Tab. B.82 PNU 512
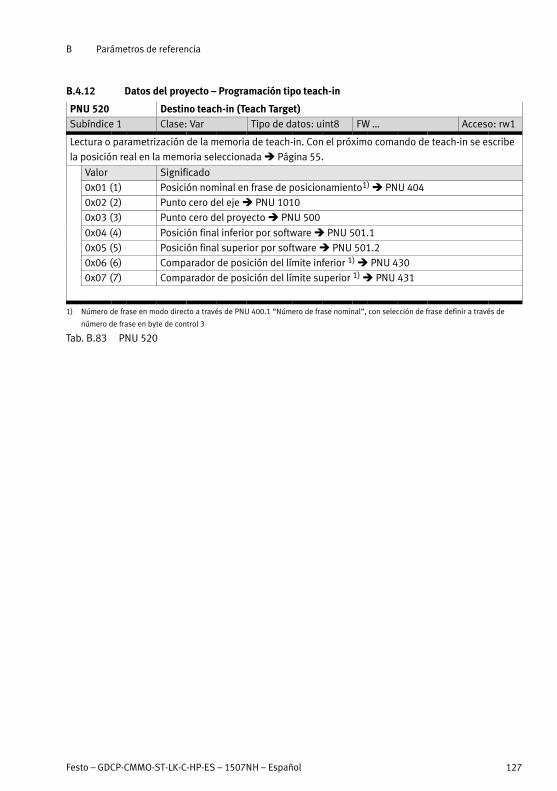
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 127
B.4.12 Datos del proyecto – Programación tipo teach-in
PNU 520 Destino teach-in (Teach Target)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización de la memoria de teach-in. Con el próximo comando de teach-in se escribe
la posición real en la memoria seleccionada � Página 55.
Valor Significado
0x01 (1) Posición nominal en frase de posicionamiento1) � PNU 404
0x02 (2) Punto cero del eje � PNU 1010
0x03 (3) Punto cero del proyecto � PNU 500
0x04 (4) Posición final inferior por software � PNU 501.1
0x05 (5) Posición final superior por software � PNU 501.2
0x06 (6) Comparador de posición del límite inferior 1) � PNU 430
0x07 (7) Comparador de posición del límite superior 1) � PNU 431
1) Número de frase en modo directo a través de PNU 400.1 “Número de frase nominal”, con selección de frase definir a través de
número de frase en byte de control 3
Tab. B.83 PNU 520
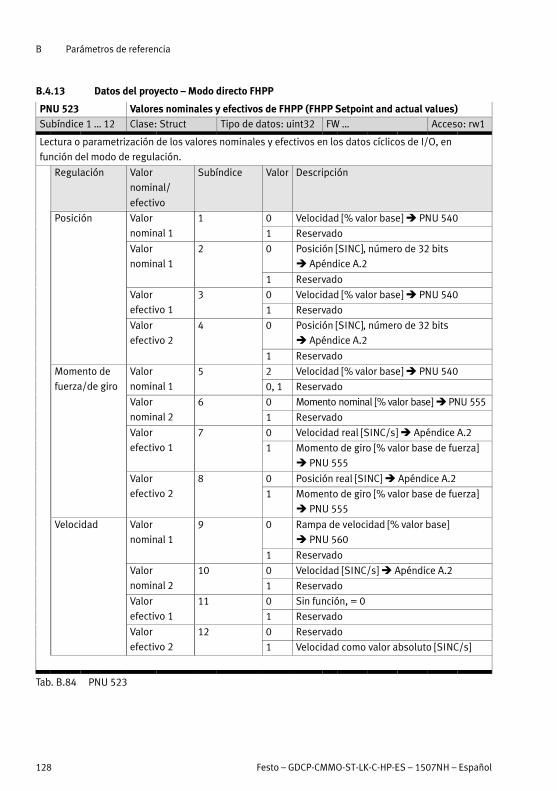
B Parámetros de referencia
128 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.13 Datos del proyecto – Modo directo FHPP
PNU 523 Valores nominales y efectivos de FHPP (FHPP Setpoint and actual values)Subíndice 1 … 12 Clase: Struct Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de los valores nominales y efectivos en los datos cíclicos de I/O, en
función del modo de regulación.
Regulación Valor
nominal/
efectivo
Subíndice Valor Descripción
Posición Valor
nominal 1
1 0 Velocidad [% valor base] � PNU 540
1 Reservado
Valor
nominal 1
2 0 Posición [SINC], número de 32 bits
� Apéndice A.2
1 Reservado
Valor
efectivo 1
3 0 Velocidad [% valor base] � PNU 540
1 Reservado
Valor
efectivo 2
4 0 Posición [SINC], número de 32 bits
� Apéndice A.2
1 Reservado
Momento de
fuerza/de giro
Valor
nominal 1
5 2 Velocidad [% valor base] � PNU 540
0, 1 Reservado
Valor
nominal 2
6 0 Momento nominal [% valor base] � PNU 555
1 Reservado
Valor
efectivo 1
7 0 Velocidad real [SINC/s] � Apéndice A.2
1 Momento de giro [% valor base de fuerza]
� PNU 555
Valor
efectivo 2
8 0 Posición real [SINC] � Apéndice A.2
1 Momento de giro [% valor base de fuerza]
� PNU 555
Velocidad Valor
nominal 1
9 0 Rampa de velocidad [% valor base]
� PNU 560
1 Reservado
Valor
nominal 2
10 0 Velocidad [SINC/s] � Apéndice A.2
1 Reservado
Valor
efectivo 1
11 0 Sin función, = 0
1 Reservado
Valor
efectivo 2
12 0 Reservado
1 Velocidad como valor absoluto [SINC/s]
Tab. B.84 PNU 523
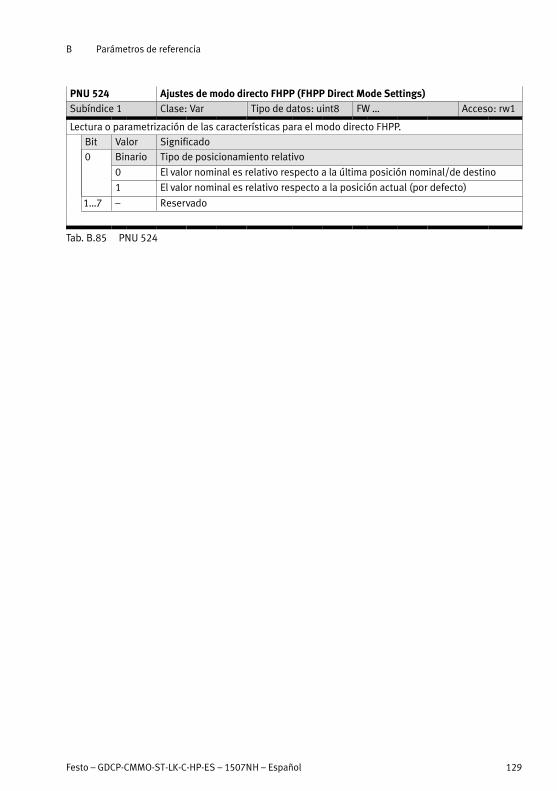
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 129
PNU 524 Ajustes de modo directo FHPP (FHPP Direct Mode Settings)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: rw1
Lectura o parametrización de las características para el modo directo FHPP.
Bit Valor Significado
0 Binario Tipo de posicionamiento relativo
0 El valor nominal es relativo respecto a la última posición nominal/de destino
1 El valor nominal es relativo respecto a la posición actual (por defecto)
1…7 – Reservado
Tab. B.85 PNU 524
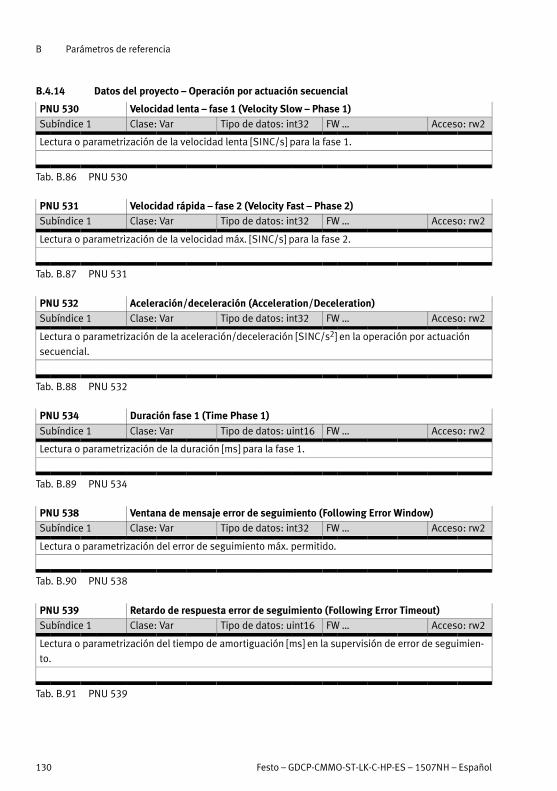
B Parámetros de referencia
130 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.14 Datos del proyecto – Operación por actuación secuencial
PNU 530 Velocidad lenta – fase 1 (Velocity Slow – Phase 1)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la velocidad lenta [SINC/s] para la fase 1.
Tab. B.86 PNU 530
PNU 531 Velocidad rápida – fase 2 (Velocity Fast – Phase 2)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la velocidad máx. [SINC/s] para la fase 2.
Tab. B.87 PNU 531
PNU 532 Aceleración/deceleración (Acceleration/Deceleration)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la aceleración/deceleración [SINC/s2] en la operación por actuación
secuencial.
Tab. B.88 PNU 532
PNU 534 Duración fase 1 (Time Phase 1)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización de la duración [ms] para la fase 1.
Tab. B.89 PNU 534
PNU 538 Ventana de mensaje error de seguimiento (Following Error Window)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización del error de seguimiento máx. permitido.
Tab. B.90 PNU 538
PNU 539 Retardo de respuesta error de seguimiento (Following Error Timeout)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización del tiempo de amortiguación [ms] en la supervisión de error de seguimien
to.
Tab. B.91 PNU 539
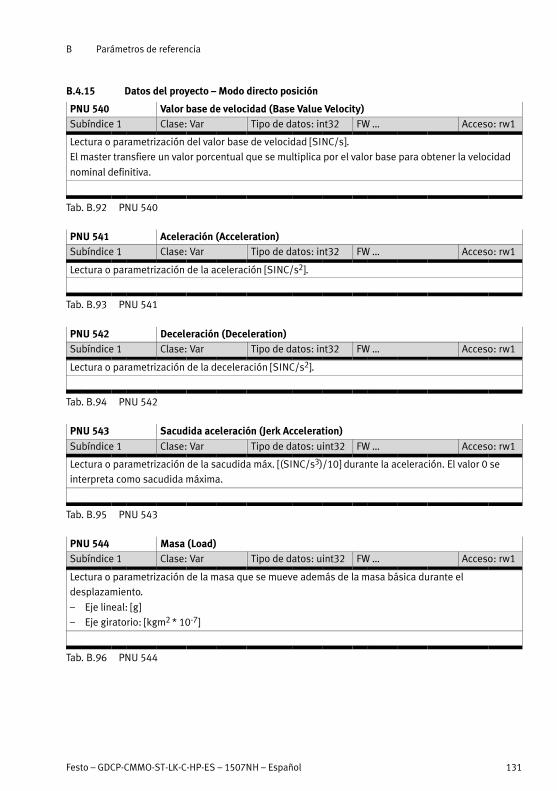
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 131
B.4.15 Datos del proyecto – Modo directo posición
PNU 540 Valor base de velocidad (Base Value Velocity)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor base de velocidad [SINC/s].
El master transfiere un valor porcentual que se multiplica por el valor base para obtener la velocidad
nominal definitiva.
Tab. B.92 PNU 540
PNU 541 Aceleración (Acceleration)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la aceleración [SINC/s2].
Tab. B.93 PNU 541
PNU 542 Deceleración (Deceleration)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la deceleración [SINC/s2].
Tab. B.94 PNU 542
PNU 543 Sacudida aceleración (Jerk Acceleration)
Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de la sacudida máx. [(SINC/s3)/10] durante la aceleración. El valor 0 se
interpreta como sacudida máxima.
Tab. B.95 PNU 543
PNU 544 Masa (Load)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de la masa que se mueve además de la masa básica durante el
desplazamiento.
– Eje lineal: [g]
– Eje giratorio: [kgm2 * 10-7]
Tab. B.96 PNU 544
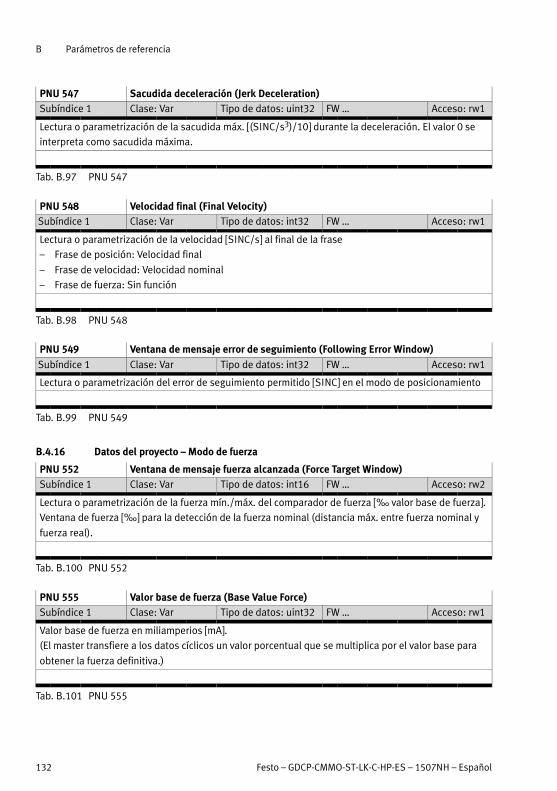
B Parámetros de referencia
132 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 547 Sacudida deceleración (Jerk Deceleration)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de la sacudida máx. [(SINC/s3)/10] durante la deceleración. El valor 0 se
interpreta como sacudida máxima.
Tab. B.97 PNU 547
PNU 548 Velocidad final (Final Velocity)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la velocidad [SINC/s] al final de la frase
– Frase de posición: Velocidad final
– Frase de velocidad: Velocidad nominal
– Frase de fuerza: Sin función
Tab. B.98 PNU 548
PNU 549 Ventana de mensaje error de seguimiento (Following Error Window)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del error de seguimiento permitido [SINC] en el modo de posicionamiento
Tab. B.99 PNU 549
B.4.16 Datos del proyecto – Modo de fuerza
PNU 552 Ventana de mensaje fuerza alcanzada (Force Target Window)Subíndice 1 Clase: Var Tipo de datos: int16 FW … Acceso: rw2
Lectura o parametrización de la fuerza mín./máx. del comparador de fuerza [‰ valor base de fuerza].
Ventana de fuerza [‰] para la detección de la fuerza nominal (distancia máx. entre fuerza nominal y
fuerza real).
Tab. B.100 PNU 552
PNU 555 Valor base de fuerza (Base Value Force)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Valor base de fuerza en miliamperios [mA].
(El master transfiere a los datos cíclicos un valor porcentual que se multiplica por el valor base para
obtener la fuerza definitiva.)
Tab. B.101 PNU 555
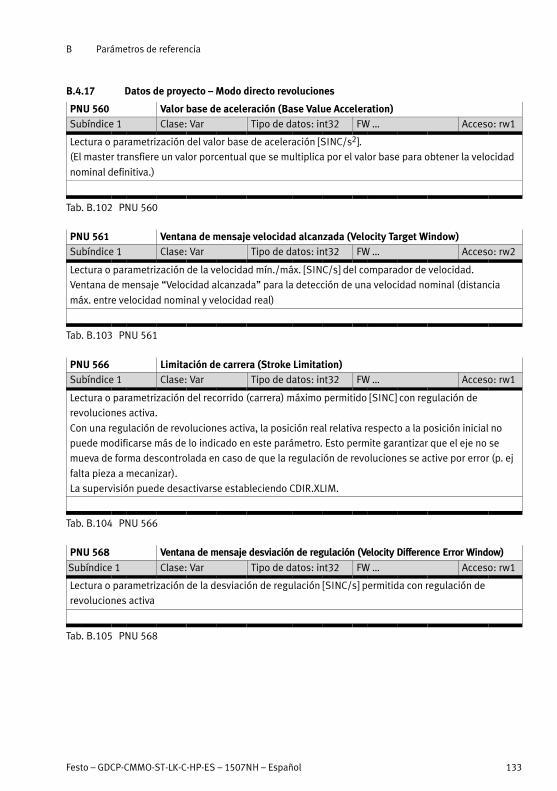
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 133
B.4.17 Datos de proyecto – Modo directo revoluciones
PNU 560 Valor base de aceleración (Base Value Acceleration)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor base de aceleración [SINC/s2].
(El master transfiere un valor porcentual que se multiplica por el valor base para obtener la velocidad
nominal definitiva.)
Tab. B.102 PNU 560
PNU 561 Ventana de mensaje velocidad alcanzada (Velocity Target Window)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la velocidad mín./máx. [SINC/s] del comparador de velocidad.
Ventana de mensaje “Velocidad alcanzada” para la detección de una velocidad nominal (distancia
máx. entre velocidad nominal y velocidad real)
Tab. B.103 PNU 561
PNU 566 Limitación de carrera (Stroke Limitation)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del recorrido (carrera) máximo permitido [SINC] con regulación de
revoluciones activa.
Con una regulación de revoluciones activa, la posición real relativa respecto a la posición inicial no
puede modificarse más de lo indicado en este parámetro. Esto permite garantizar que el eje no se
mueva de forma descontrolada en caso de que la regulación de revoluciones se active por error (p. ej
falta pieza a mecanizar).
La supervisión puede desactivarse estableciendo CDIR.XLIM.
Tab. B.104 PNU 566
PNU 568 Ventana de mensaje desviación de regulación (Velocity Difference Error Window)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización de la desviación de regulación [SINC/s] permitida con regulación de
revoluciones activa
Tab. B.105 PNU 568
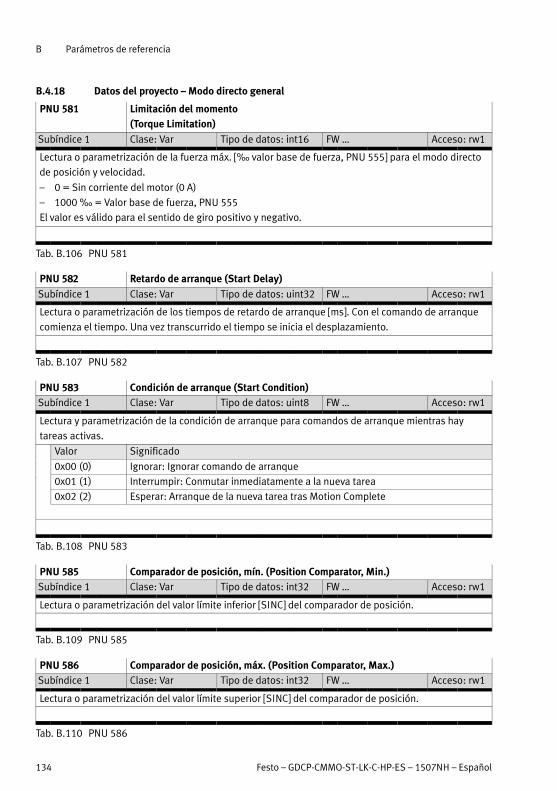
B Parámetros de referencia
134 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.18 Datos del proyecto – Modo directo general
PNU 581 Limitación del momento (Torque Limitation)
Subíndice 1 Clase: Var Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización de la fuerza máx. [‰ valor base de fuerza, PNU 555] para el modo directo
de posición y velocidad.
– 0 = Sin corriente del motor (0 A)
– 1000 ‰ = Valor base de fuerza, PNU 555
El valor es válido para el sentido de giro positivo y negativo.
Tab. B.106 PNU 581
PNU 582 Retardo de arranque (Start Delay)
Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización de los tiempos de retardo de arranque [ms]. Con el comando de arranque
comienza el tiempo. Una vez transcurrido el tiempo se inicia el desplazamiento.
Tab. B.107 PNU 582
PNU 583 Condición de arranque (Start Condition)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: rw1
Lectura y parametrización de la condición de arranque para comandos de arranque mientras hay
tareas activas.
Valor Significado
0x00 (0) Ignorar: Ignorar comando de arranque
0x01 (1) Interrumpir: Conmutar inmediatamente a la nueva tarea
0x02 (2) Esperar: Arranque de la nueva tarea tras Motion Complete
Tab. B.108 PNU 583
PNU 585 Comparador de posición, mín. (Position Comparator, Min.)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [SINC] del comparador de posición.
Tab. B.109 PNU 585
PNU 586 Comparador de posición, máx. (Position Comparator, Max.)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [SINC] del comparador de posición.
Tab. B.110 PNU 586
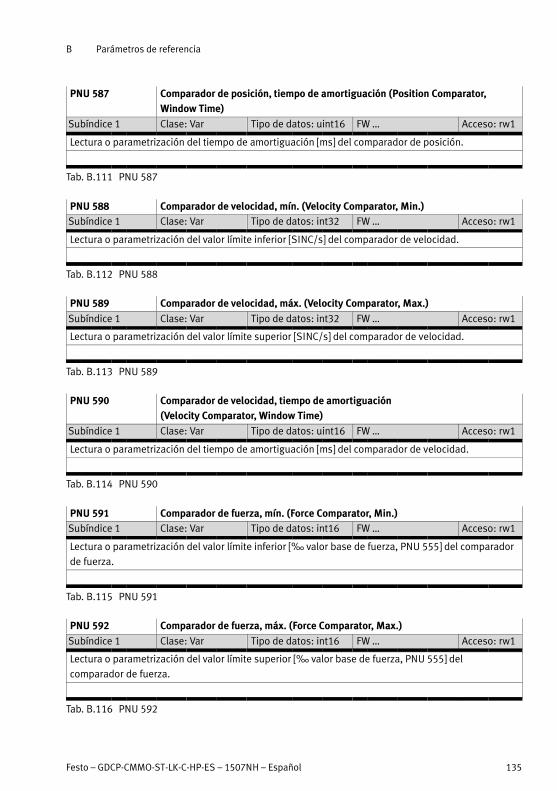
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 135
PNU 587 Comparador de posición, tiempo de amortiguación (Position Comparator,Window Time)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización del tiempo de amortiguación [ms] del comparador de posición.
Tab. B.111 PNU 587
PNU 588 Comparador de velocidad, mín. (Velocity Comparator, Min.)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [SINC/s] del comparador de velocidad.
Tab. B.112 PNU 588
PNU 589 Comparador de velocidad, máx. (Velocity Comparator, Max.)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [SINC/s] del comparador de velocidad.
Tab. B.113 PNU 589
PNU 590 Comparador de velocidad, tiempo de amortiguación (Velocity Comparator, Window Time)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización del tiempo de amortiguación [ms] del comparador de velocidad.
Tab. B.114 PNU 590
PNU 591 Comparador de fuerza, mín. (Force Comparator, Min.)Subíndice 1 Clase: Var Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [‰ valor base de fuerza, PNU 555] del comparador
de fuerza.
Tab. B.115 PNU 591
PNU 592 Comparador de fuerza, máx. (Force Comparator, Max.)
Subíndice 1 Clase: Var Tipo de datos: int16 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [‰ valor base de fuerza, PNU 555] del
comparador de fuerza.
Tab. B.116 PNU 592
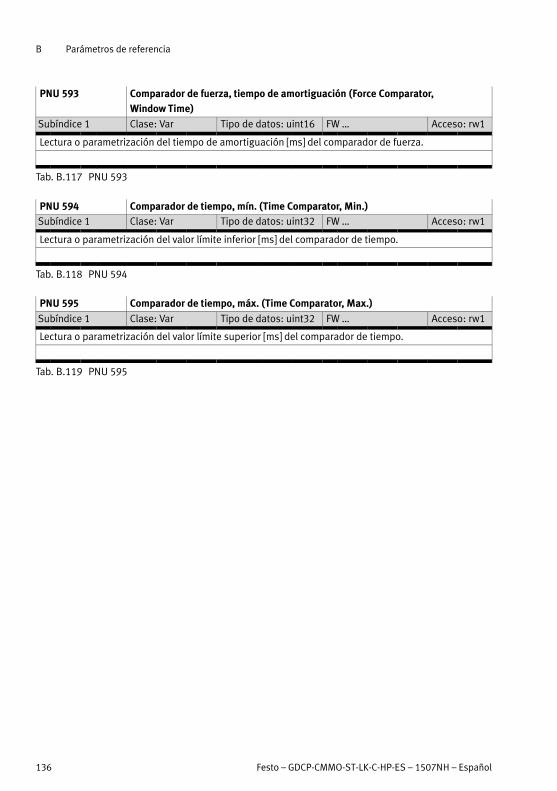
B Parámetros de referencia
136 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 593 Comparador de fuerza, tiempo de amortiguación (Force Comparator,Window Time)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización del tiempo de amortiguación [ms] del comparador de fuerza.
Tab. B.117 PNU 593
PNU 594 Comparador de tiempo, mín. (Time Comparator, Min.)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización del valor límite inferior [ms] del comparador de tiempo.
Tab. B.118 PNU 594
PNU 595 Comparador de tiempo, máx. (Time Comparator, Max.)
Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización del valor límite superior [ms] del comparador de tiempo.
Tab. B.119 PNU 595
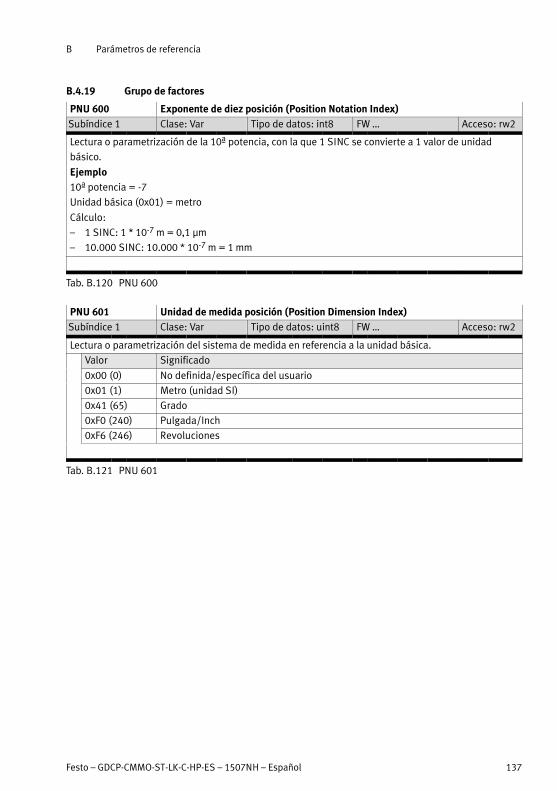
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 137
B.4.19 Grupo de factores
PNU 600 Exponente de diez posición (Position Notation Index)Subíndice 1 Clase: Var Tipo de datos: int8 FW … Acceso: rw2
Lectura o parametrización de la 10ª potencia, con la que 1 SINC se convierte a 1 valor de unidad
básico.
Ejemplo10ª potencia = -7
Unidad básica (0x01) = metro
Cálculo:
– 1 SINC: 1 * 10-7 m = 0,1 μm
– 10.000 SINC: 10.000 * 10-7 m = 1 mm
Tab. B.120 PNU 600
PNU 601 Unidad de medida posición (Position Dimension Index)Subíndice 1 Clase: Var Tipo de datos: uint8 FW … Acceso: rw2
Lectura o parametrización del sistema de medida en referencia a la unidad básica.
Valor Significado
0x00 (0) No definida/específica del usuario
0x01 (1) Metro (unidad SI)
0x41 (65) Grado
0xF0 (240) Pulgada/Inch
0xF6 (246) Revoluciones
Tab. B.121 PNU 601
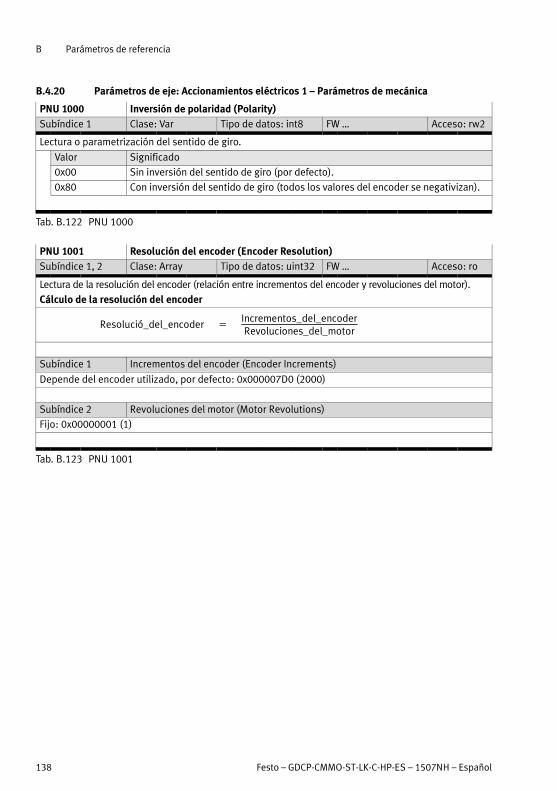
B Parámetros de referencia
138 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.20 Parámetros de eje: Accionamientos eléctricos 1 – Parámetros de mecánica
PNU 1000 Inversión de polaridad (Polarity)Subíndice 1 Clase: Var Tipo de datos: int8 FW … Acceso: rw2
Lectura o parametrización del sentido de giro.
Valor Significado
0x00 Sin inversión del sentido de giro (por defecto).
0x80 Con inversión del sentido de giro (todos los valores del encoder se negativizan).
Tab. B.122 PNU 1000
PNU 1001 Resolución del encoder (Encoder Resolution)Subíndice 1, 2 Clase: Array Tipo de datos: uint32 FW … Acceso: ro
Lectura de la resolución del encoder (relación entre incrementos del encoder y revoluciones del motor).
Cálculo de la resolución del encoder
Resolució_del_encoder� ��Incrementos_del_encoderRevoluciones_del_motor
Subíndice 1 Incrementos del encoder (Encoder Increments)
Depende del encoder utilizado, por defecto: 0x000007D0 (2000)
Subíndice 2 Revoluciones del motor (Motor Revolutions)
Fijo: 0x00000001 (1)
Tab. B.123 PNU 1001
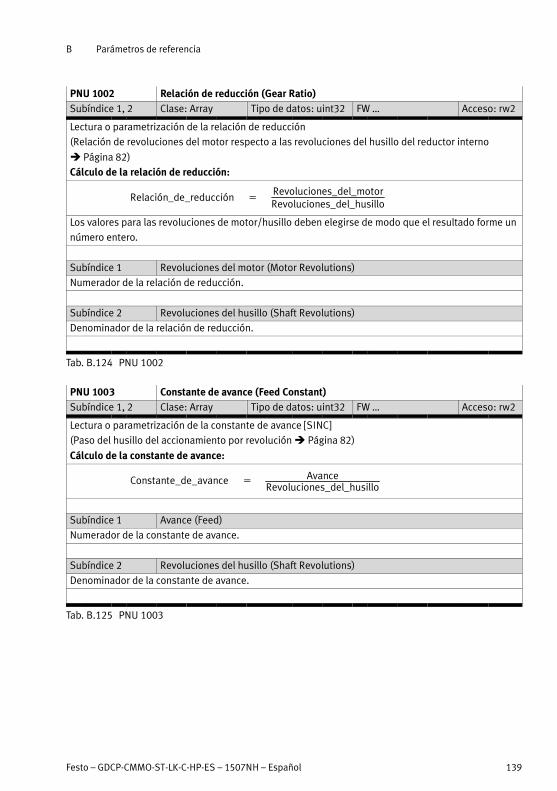
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 139
PNU 1002 Relación de reducción (Gear Ratio)Subíndice 1, 2 Clase: Array Tipo de datos: uint32 FW … Acceso: rw2
Lectura o parametrización de la relación de reducción
(Relación de revoluciones del motor respecto a las revoluciones del husillo del reductor interno
� Página 82)
Cálculo de la relación de reducción:
Relación_de_reducción� ��Revoluciones_del_motorRevoluciones_del_husillo
Los valores para las revoluciones de motor/husillo deben elegirse de modo que el resultado forme un
número entero.
Subíndice 1 Revoluciones del motor (Motor Revolutions)
Numerador de la relación de reducción.
Subíndice 2 Revoluciones del husillo (Shaft Revolutions)
Denominador de la relación de reducción.
Tab. B.124 PNU 1002
PNU 1003 Constante de avance (Feed Constant)Subíndice 1, 2 Clase: Array Tipo de datos: uint32 FW … Acceso: rw2
Lectura o parametrización de la constante de avance [SINC]
(Paso del husillo del accionamiento por revolución � Página 82)
Cálculo de la constante de avance:
Constante_de_avance� �� AvanceRevoluciones_del_husillo
Subíndice 1 Avance (Feed)
Numerador de la constante de avance.
Subíndice 2 Revoluciones del husillo (Shaft Revolutions)
Denominador de la constante de avance.
Tab. B.125 PNU 1003
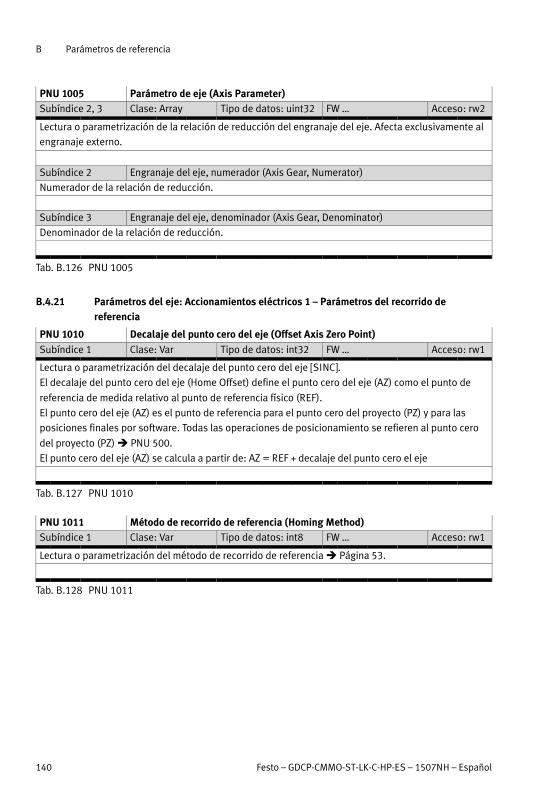
B Parámetros de referencia
140 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 1005 Parámetro de eje (Axis Parameter)Subíndice 2, 3 Clase: Array Tipo de datos: uint32 FW … Acceso: rw2
Lectura o parametrización de la relación de reducción del engranaje del eje. Afecta exclusivamente al
engranaje externo.
Subíndice 2 Engranaje del eje, numerador (Axis Gear, Numerator)
Numerador de la relación de reducción.
Subíndice 3 Engranaje del eje, denominador (Axis Gear, Denominator)
Denominador de la relación de reducción.
Tab. B.126 PNU 1005
B.4.21 Parámetros del eje: Accionamientos eléctricos 1 – Parámetros del recorrido dereferencia
PNU 1010 Decalaje del punto cero del eje (Offset Axis Zero Point)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw1
Lectura o parametrización del decalaje del punto cero del eje [SINC].
El decalaje del punto cero del eje (Home Offset) define el punto cero del eje (AZ) como el punto de
referencia de medida relativo al punto de referencia físico (REF).
El punto cero del eje (AZ) es el punto de referencia para el punto cero del proyecto (PZ) y para las
posiciones finales por software. Todas las operaciones de posicionamiento se refieren al punto cero
del proyecto (PZ) � PNU 500.
El punto cero del eje (AZ) se calcula a partir de: AZ = REF + decalaje del punto cero el eje
Tab. B.127 PNU 1010
PNU 1011 Método de recorrido de referencia (Homing Method)Subíndice 1 Clase: Var Tipo de datos: int8 FW … Acceso: rw1
Lectura o parametrización del método de recorrido de referencia � Página 53.
Tab. B.128 PNU 1011
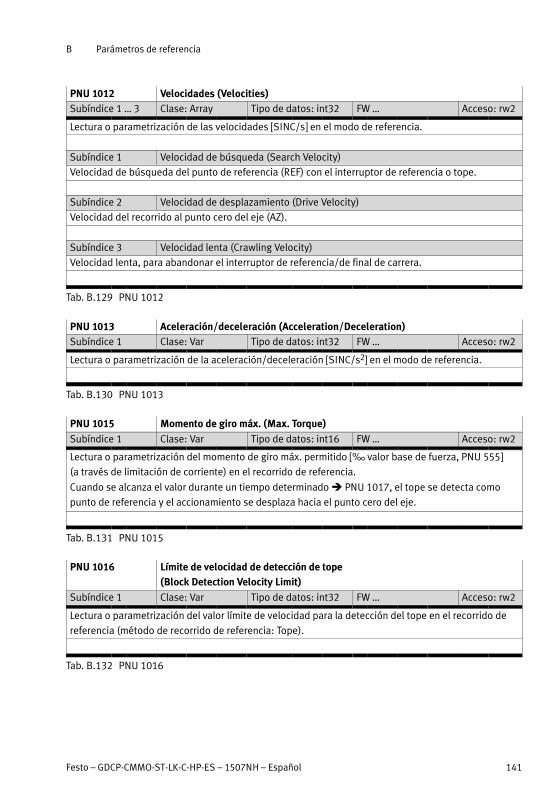
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 141
PNU 1012 Velocidades (Velocities)Subíndice 1 … 3 Clase: Array Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de las velocidades [SINC/s] en el modo de referencia.
Subíndice 1 Velocidad de búsqueda (Search Velocity)
Velocidad de búsqueda del punto de referencia (REF) con el interruptor de referencia o tope.
Subíndice 2 Velocidad de desplazamiento (Drive Velocity)
Velocidad del recorrido al punto cero del eje (AZ).
Subíndice 3 Velocidad lenta (Crawling Velocity)
Velocidad lenta, para abandonar el interruptor de referencia/de final de carrera.
Tab. B.129 PNU 1012
PNU 1013 Aceleración/deceleración (Acceleration/Deceleration)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la aceleración/deceleración [SINC/s2] en el modo de referencia.
Tab. B.130 PNU 1013
PNU 1015 Momento de giro máx. (Max. Torque)
Subíndice 1 Clase: Var Tipo de datos: int16 FW … Acceso: rw2
Lectura o parametrización del momento de giro máx. permitido [‰ valor base de fuerza, PNU 555]
(a través de limitación de corriente) en el recorrido de referencia.
Cuando se alcanza el valor durante un tiempo determinado � PNU 1017, el tope se detecta como
punto de referencia y el accionamiento se desplaza hacia el punto cero del eje.
Tab. B.131 PNU 1015
PNU 1016 Límite de velocidad de detección de tope (Block Detection Velocity Limit)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización del valor límite de velocidad para la detección del tope en el recorrido de
referencia (método de recorrido de referencia: Tope).
Tab. B.132 PNU 1016
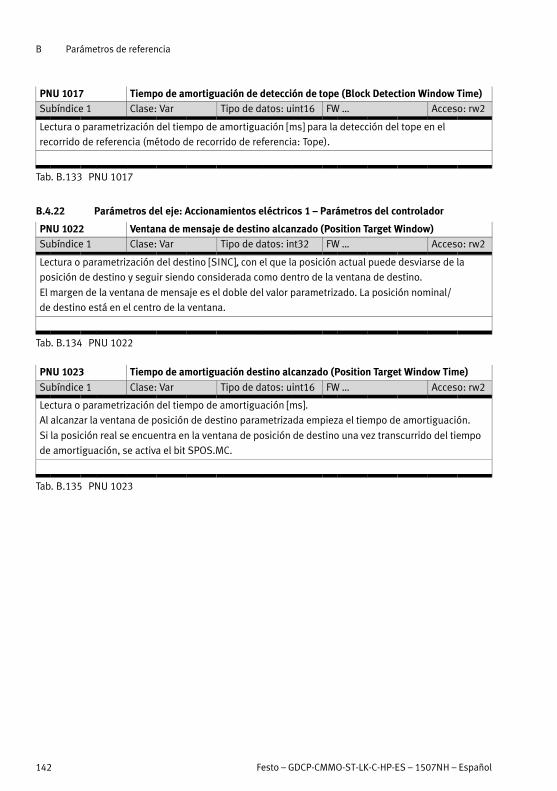
B Parámetros de referencia
142 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 1017 Tiempo de amortiguación de detección de tope (Block Detection Window Time)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización del tiempo de amortiguación [ms] para la detección del tope en el
recorrido de referencia (método de recorrido de referencia: Tope).
Tab. B.133 PNU 1017
B.4.22 Parámetros del eje: Accionamientos eléctricos 1 – Parámetros del controlador
PNU 1022 Ventana de mensaje de destino alcanzado (Position Target Window)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización del destino [SINC], con el que la posición actual puede desviarse de la
posición de destino y seguir siendo considerada como dentro de la ventana de destino.
El margen de la ventana de mensaje es el doble del valor parametrizado. La posición nominal/
de destino está en el centro de la ventana.
Tab. B.134 PNU 1022
PNU 1023 Tiempo de amortiguación destino alcanzado (Position Target Window Time)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización del tiempo de amortiguación [ms].
Al alcanzar la ventana de posición de destino parametrizada empieza el tiempo de amortiguación.
Si la posición real se encuentra en la ventana de posición de destino una vez transcurrido del tiempo
de amortiguación, se activa el bit SPOS.MC.
Tab. B.135 PNU 1023
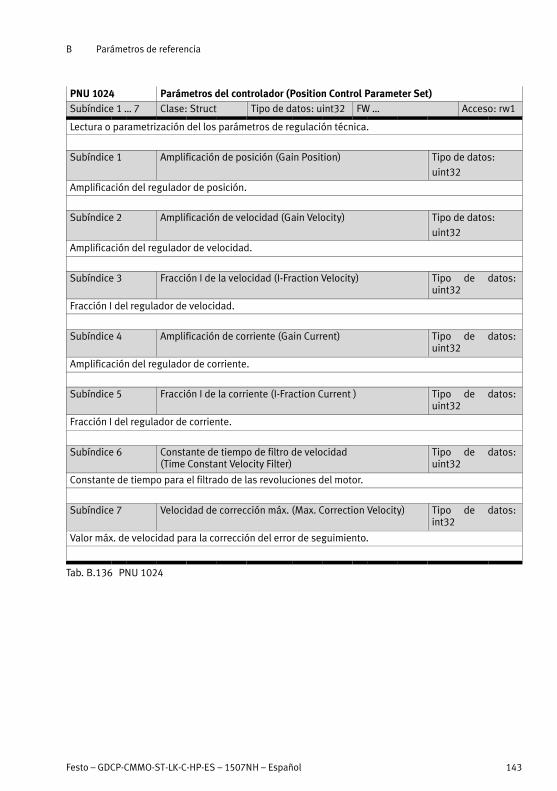
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 143
PNU 1024 Parámetros del controlador (Position Control Parameter Set)Subíndice 1 … 7 Clase: Struct Tipo de datos: uint32 FW … Acceso: rw1
Lectura o parametrización del los parámetros de regulación técnica.
Subíndice 1 Amplificación de posición (Gain Position) Tipo de datos:
uint32
Amplificación del regulador de posición.
Subíndice 2 Amplificación de velocidad (Gain Velocity) Tipo de datos:
uint32
Amplificación del regulador de velocidad.
Subíndice 3 Fracción I de la velocidad (I-Fraction Velocity) Tipo de datos:uint32
Fracción I del regulador de velocidad.
Subíndice 4 Amplificación de corriente (Gain Current) Tipo de datos:uint32
Amplificación del regulador de corriente.
Subíndice 5 Fracción I de la corriente (I-Fraction Current ) Tipo de datos:uint32
Fracción I del regulador de corriente.
Subíndice 6 Constante de tiempo de filtro de velocidad (Time Constant Velocity Filter)
Tipo de datos:uint32
Constante de tiempo para el filtrado de las revoluciones del motor.
Subíndice 7 Velocidad de corrección máx. (Max. Correction Velocity) Tipo de datos:int32
Valor máx. de velocidad para la corrección del error de seguimiento.
Tab. B.136 PNU 1024
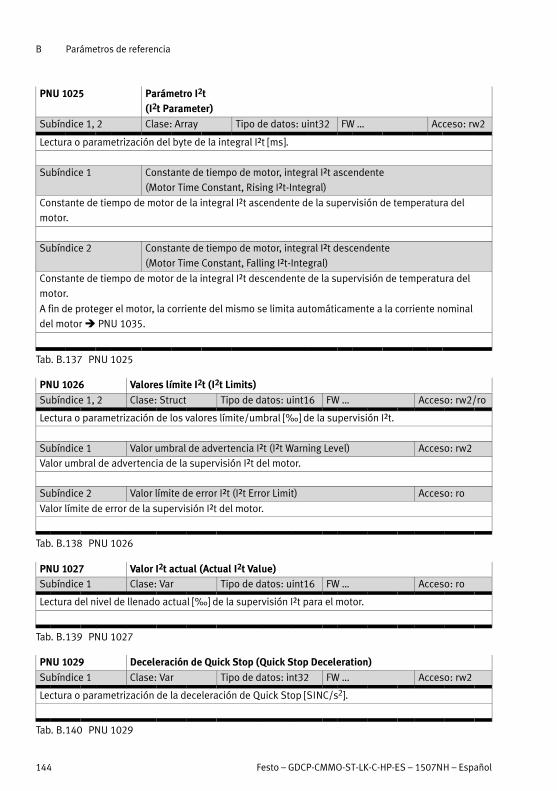
B Parámetros de referencia
144 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 1025 Parámetro I2t (I2t Parameter)
Subíndice 1, 2 Clase: Array Tipo de datos: uint32 FW … Acceso: rw2
Lectura o parametrización del byte de la integral I²t [ms].
Subíndice 1 Constante de tiempo de motor, integral I²t ascendente
(Motor Time Constant, Rising I²t-Integral)
Constante de tiempo de motor de la integral I²t ascendente de la supervisión de temperatura del
motor.
Subíndice 2 Constante de tiempo de motor, integral I²t descendente
(Motor Time Constant, Falling I²t-Integral)
Constante de tiempo de motor de la integral I²t descendente de la supervisión de temperatura del
motor.
A fin de proteger el motor, la corriente del mismo se limita automáticamente a la corriente nominal
del motor � PNU 1035.
Tab. B.137 PNU 1025
PNU 1026 Valores límite I2t (I2t Limits)
Subíndice 1, 2 Clase: Struct Tipo de datos: uint16 FW … Acceso: rw2/ro
Lectura o parametrización de los valores límite/umbral [‰] de la supervisión I²t.
Subíndice 1 Valor umbral de advertencia I²t (I²t Warning Level) Acceso: rw2
Valor umbral de advertencia de la supervisión I²t del motor.
Subíndice 2 Valor límite de error I²t (I²t Error Limit) Acceso: ro
Valor límite de error de la supervisión I²t del motor.
Tab. B.138 PNU 1026
PNU 1027 Valor I2t actual (Actual I2t Value)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: ro
Lectura del nivel de llenado actual [‰] de la supervisión I²t para el motor.
Tab. B.139 PNU 1027
PNU 1029 Deceleración de Quick Stop (Quick Stop Deceleration)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la deceleración de Quick Stop [SINC/s2].
Tab. B.140 PNU 1029
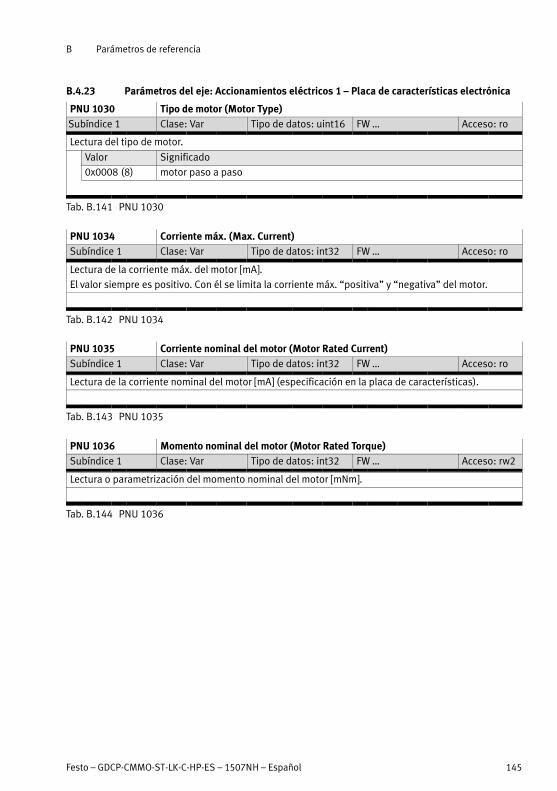
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 145
B.4.23 Parámetros del eje: Accionamientos eléctricos 1 – Placa de características electrónica
PNU 1030 Tipo de motor (Motor Type)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: ro
Lectura del tipo de motor.
Valor Significado
0x0008 (8) motor paso a paso
Tab. B.141 PNU 1030
PNU 1034 Corriente máx. (Max. Current)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: ro
Lectura de la corriente máx. del motor [mA].
El valor siempre es positivo. Con él se limita la corriente máx. “positiva” y “negativa” del motor.
Tab. B.142 PNU 1034
PNU 1035 Corriente nominal del motor (Motor Rated Current)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: ro
Lectura de la corriente nominal del motor [mA] (especificación en la placa de características).
Tab. B.143 PNU 1035
PNU 1036 Momento nominal del motor (Motor Rated Torque)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización del momento nominal del motor [mNm].
Tab. B.144 PNU 1036
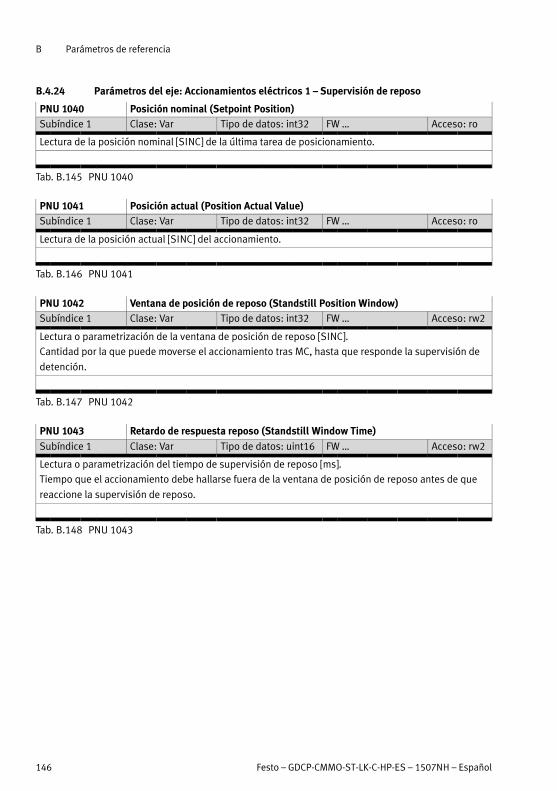
B Parámetros de referencia
146 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
B.4.24 Parámetros del eje: Accionamientos eléctricos 1 – Supervisión de reposo
PNU 1040 Posición nominal (Setpoint Position)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: ro
Lectura de la posición nominal [SINC] de la última tarea de posicionamiento.
Tab. B.145 PNU 1040
PNU 1041 Posición actual (Position Actual Value)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: ro
Lectura de la posición actual [SINC] del accionamiento.
Tab. B.146 PNU 1041
PNU 1042 Ventana de posición de reposo (Standstill Position Window)Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: rw2
Lectura o parametrización de la ventana de posición de reposo [SINC].
Cantidad por la que puede moverse el accionamiento tras MC, hasta que responde la supervisión de
detención.
Tab. B.147 PNU 1042
PNU 1043 Retardo de respuesta reposo (Standstill Window Time)
Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización del tiempo de supervisión de reposo [ms].
Tiempo que el accionamiento debe hallarse fuera de la ventana de posición de reposo antes de que
reaccione la supervisión de reposo.
Tab. B.148 PNU 1043
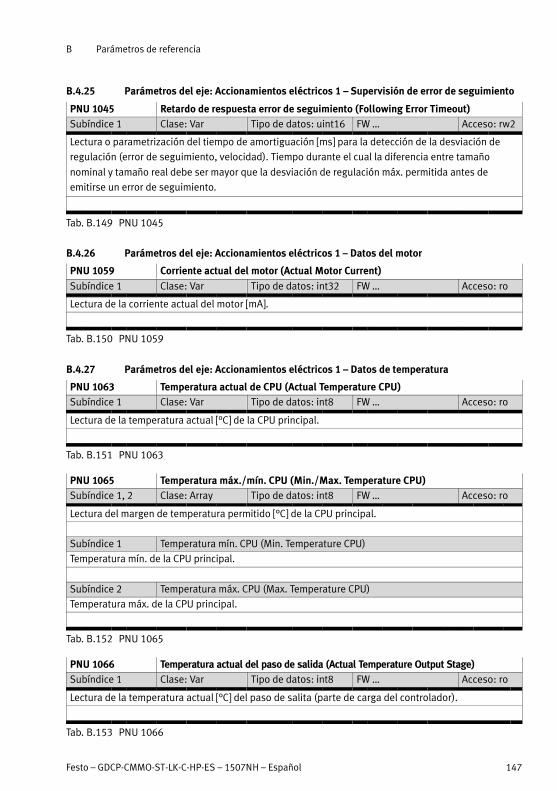
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 147
B.4.25 Parámetros del eje: Accionamientos eléctricos 1 – Supervisión de error de seguimiento
PNU 1045 Retardo de respuesta error de seguimiento (Following Error Timeout)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw2
Lectura o parametrización del tiempo de amortiguación [ms] para la detección de la desviación de
regulación (error de seguimiento, velocidad). Tiempo durante el cual la diferencia entre tamaño
nominal y tamaño real debe ser mayor que la desviación de regulación máx. permitida antes de
emitirse un error de seguimiento.
Tab. B.149 PNU 1045
B.4.26 Parámetros del eje: Accionamientos eléctricos 1 – Datos del motor
PNU 1059 Corriente actual del motor (Actual Motor Current)
Subíndice 1 Clase: Var Tipo de datos: int32 FW … Acceso: ro
Lectura de la corriente actual del motor [mA].
Tab. B.150 PNU 1059
B.4.27 Parámetros del eje: Accionamientos eléctricos 1 – Datos de temperatura
PNU 1063 Temperatura actual de CPU (Actual Temperature CPU)Subíndice 1 Clase: Var Tipo de datos: int8 FW … Acceso: ro
Lectura de la temperatura actual [°C] de la CPU principal.
Tab. B.151 PNU 1063
PNU 1065 Temperatura máx./mín. CPU (Min./Max. Temperature CPU)Subíndice 1, 2 Clase: Array Tipo de datos: int8 FW … Acceso: ro
Lectura del margen de temperatura permitido [°C] de la CPU principal.
Subíndice 1 Temperatura mín. CPU (Min. Temperature CPU)
Temperatura mín. de la CPU principal.
Subíndice 2 Temperatura máx. CPU (Max. Temperature CPU)
Temperatura máx. de la CPU principal.
Tab. B.152 PNU 1065
PNU 1066 Temperatura actual del paso de salida (Actual Temperature Output Stage)Subíndice 1 Clase: Var Tipo de datos: int8 FW … Acceso: ro
Lectura de la temperatura actual [°C] del paso de salita (parte de carga del controlador).
Tab. B.153 PNU 1066
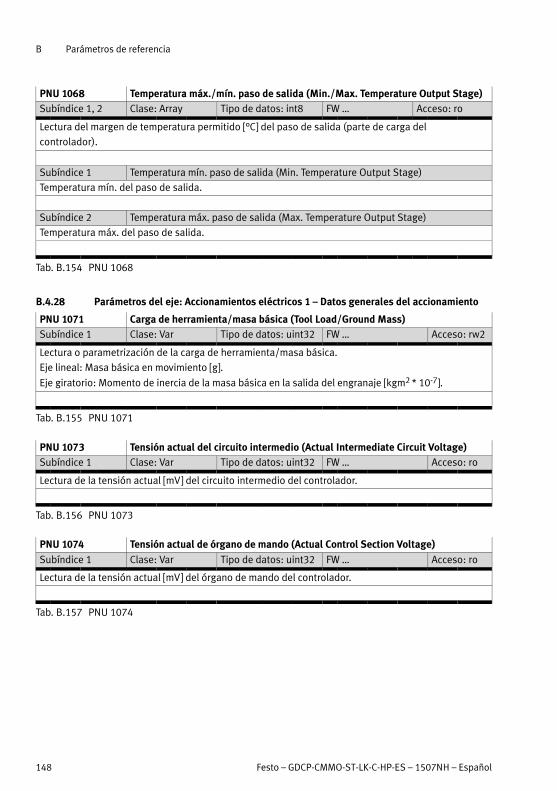
B Parámetros de referencia
148 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
PNU 1068 Temperatura máx./mín. paso de salida (Min./Max. Temperature Output Stage)Subíndice 1, 2 Clase: Array Tipo de datos: int8 FW … Acceso: ro
Lectura del margen de temperatura permitido [°C] del paso de salida (parte de carga del
controlador).
Subíndice 1 Temperatura mín. paso de salida (Min. Temperature Output Stage)
Temperatura mín. del paso de salida.
Subíndice 2 Temperatura máx. paso de salida (Max. Temperature Output Stage)
Temperatura máx. del paso de salida.
Tab. B.154 PNU 1068
B.4.28 Parámetros del eje: Accionamientos eléctricos 1 – Datos generales del accionamiento
PNU 1071 Carga de herramienta/masa básica (Tool Load/Ground Mass)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: rw2
Lectura o parametrización de la carga de herramienta/masa básica.
Eje lineal: Masa básica en movimiento [g].
Eje giratorio: Momento de inercia de la masa básica en la salida del engranaje [kgm2 * 10-7].
Tab. B.155 PNU 1071
PNU 1073 Tensión actual del circuito intermedio (Actual Intermediate Circuit Voltage)Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: ro
Lectura de la tensión actual [mV] del circuito intermedio del controlador.
Tab. B.156 PNU 1073
PNU 1074 Tensión actual de órgano de mando (Actual Control Section Voltage)
Subíndice 1 Clase: Var Tipo de datos: uint32 FW … Acceso: ro
Lectura de la tensión actual [mV] del órgano de mando del controlador.
Tab. B.157 PNU 1074
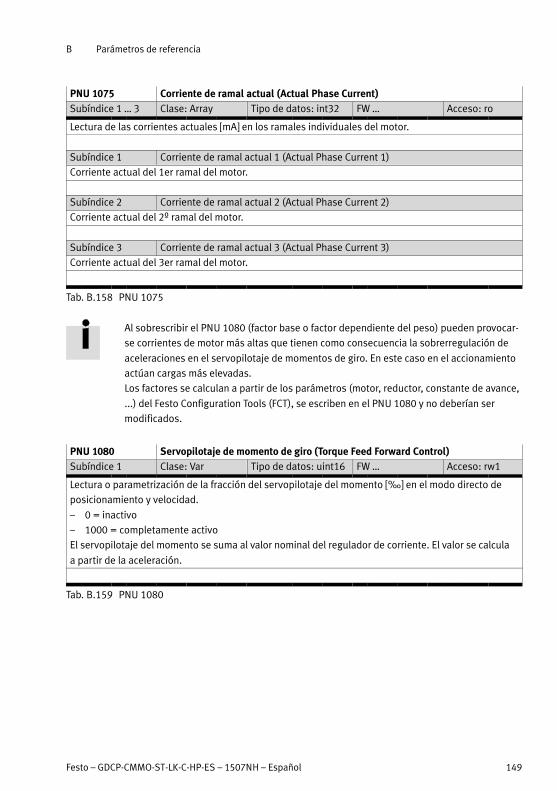
B Parámetros de referencia
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 149
PNU 1075 Corriente de ramal actual (Actual Phase Current)Subíndice 1 … 3 Clase: Array Tipo de datos: int32 FW … Acceso: ro
Lectura de las corrientes actuales [mA] en los ramales individuales del motor.
Subíndice 1 Corriente de ramal actual 1 (Actual Phase Current 1)
Corriente actual del 1er ramal del motor.
Subíndice 2 Corriente de ramal actual 2 (Actual Phase Current 2)
Corriente actual del 2º ramal del motor.
Subíndice 3 Corriente de ramal actual 3 (Actual Phase Current 3)
Corriente actual del 3er ramal del motor.
Tab. B.158 PNU 1075
Al sobrescribir el PNU 1080 (factor base o factor dependiente del peso) pueden provocar
se corrientes de motor más altas que tienen como consecuencia la sobrerregulación de
aceleraciones en el servopilotaje de momentos de giro. En este caso en el accionamiento
actúan cargas más elevadas.
Los factores se calculan a partir de los parámetros (motor, reductor, constante de avance,
...) del Festo Configuration Tools (FCT), se escriben en el PNU 1080 y no deberían ser
modificados.
PNU 1080 Servopilotaje de momento de giro (Torque Feed Forward Control)Subíndice 1 Clase: Var Tipo de datos: uint16 FW … Acceso: rw1
Lectura o parametrización de la fracción del servopilotaje del momento [‰] en el modo directo de
posicionamiento y velocidad.
– 0 = inactivo
– 1000 = completamente activo
El servopilotaje del momento se suma al valor nominal del regulador de corriente. El valor se calcula
a partir de la aceleración.
Tab. B.159 PNU 1080
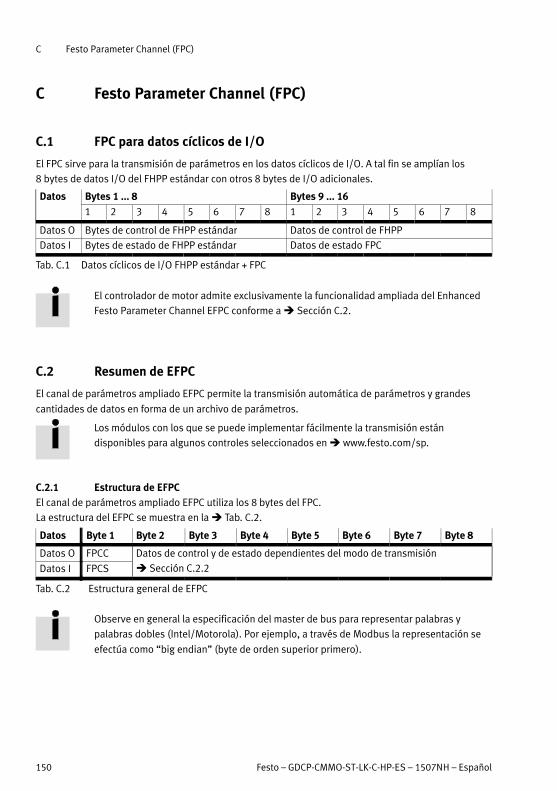
C Festo Parameter Channel (FPC)
150 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
C Festo Parameter Channel (FPC)
C.1 FPC para datos cíclicos de I/O
El FPC sirve para la transmisión de parámetros en los datos cíclicos de I/O. A tal fin se amplían los
8 bytes de datos I/O del FHPP estándar con otros 8 bytes de I/O adicionales.
Datos Bytes 1 ... 8 Bytes 9 ... 16
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
Datos O Bytes de control de FHPP estándar Datos de control de FHPP
Datos I Bytes de estado de FHPP estándar Datos de estado FPC
Tab. C.1 Datos cíclicos de I/O FHPP estándar + FPC
El controlador de motor admite exclusivamente la funcionalidad ampliada del Enhanced
Festo Parameter Channel EFPC conforme a � Sección C.2.
C.2 Resumen de EFPC
El canal de parámetros ampliado EFPC permite la transmisión automática de parámetros y grandes
cantidades de datos en forma de un archivo de parámetros.
Los módulos con los que se puede implementar fácilmente la transmisión están
disponibles para algunos controles seleccionados en � www.festo.com/sp.
C.2.1 Estructura de EFPCEl canal de parámetros ampliado EFPC utiliza los 8 bytes del FPC.
La estructura del EFPC se muestra en la � Tab. C.2.
Datos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O FPCC Datos de control y de estado dependientes del modo de transmisión
� Sección C.2.2Datos I FPCS
Tab. C.2 Estructura general de EFPC
Observe en general la especificación del master de bus para representar palabras y
palabras dobles (Intel/Motorola). Por ejemplo, a través de Modbus la representación se
efectúa como “big endian” (byte de orden superior primero).
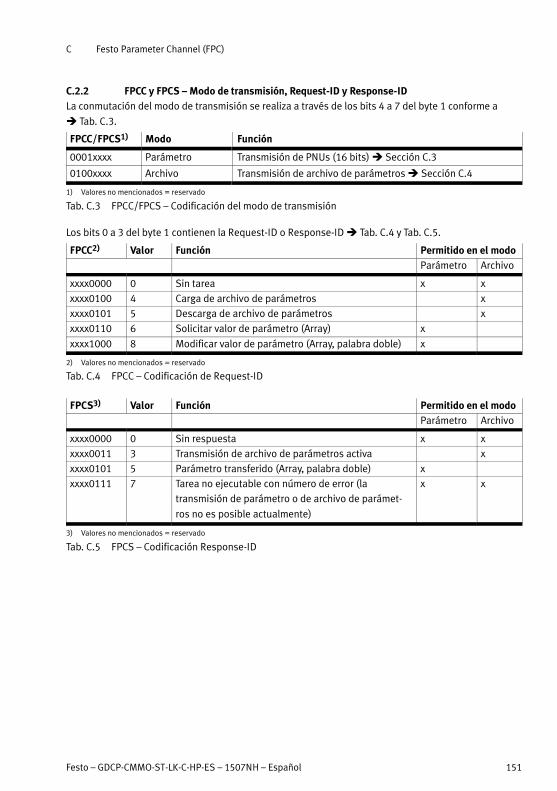
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 151
C.2.2 FPCC y FPCS – Modo de transmisión, Request-ID y Response-IDLa conmutación del modo de transmisión se realiza a través de los bits 4 a 7 del byte 1 conforme a
� Tab. C.3.
FPCC/FPCS1) Modo Función
0001xxxx Parámetro Transmisión de PNUs (16 bits) � Sección C.3
0100xxxx Archivo Transmisión de archivo de parámetros � Sección C.4
1) Valores no mencionados = reservado
Tab. C.3 FPCC/FPCS – Codificación del modo de transmisión
Los bits 0 a 3 del byte 1 contienen la Request-ID o Response-ID � Tab. C.4 y Tab. C.5.
FPCC2) Valor Función Permitido en el modoParámetro Archivo
xxxx0000 0 Sin tarea x x
xxxx0100 4 Carga de archivo de parámetros x
xxxx0101 5 Descarga de archivo de parámetros x
xxxx0110 6 Solicitar valor de parámetro (Array) x
xxxx1000 8 Modificar valor de parámetro (Array, palabra doble) x
2) Valores no mencionados = reservado
Tab. C.4 FPCC – Codificación de Request-ID
FPCS3) Valor Función Permitido en el modoParámetro Archivo
xxxx0000 0 Sin respuesta x x
xxxx0011 3 Transmisión de archivo de parámetros activa x
xxxx0101 5 Parámetro transferido (Array, palabra doble) x
xxxx0111 7 Tarea no ejecutable con número de error (la
transmisión de parámetro o de archivo de parámet
ros no es posible actualmente)
x x
3) Valores no mencionados = reservado
Tab. C.5 FPCS – Codificación Response-ID
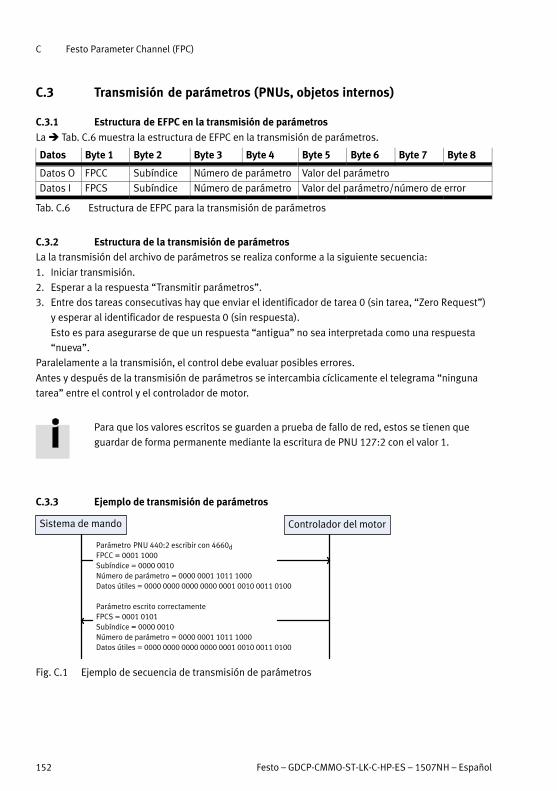
C Festo Parameter Channel (FPC)
152 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
C.3 Transmisión de parámetros (PNUs, objetos internos)
C.3.1 Estructura de EFPC en la transmisión de parámetros
La � Tab. C.6 muestra la estructura de EFPC en la transmisión de parámetros.
Datos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O FPCC Subíndice Número de parámetro Valor del parámetro
Datos I FPCS Subíndice Número de parámetro Valor del parámetro/número de error
Tab. C.6 Estructura de EFPC para la transmisión de parámetros
C.3.2 Estructura de la transmisión de parámetrosLa la transmisión del archivo de parámetros se realiza conforme a la siguiente secuencia:
1. Iniciar transmisión.
2. Esperar a la respuesta “Transmitir parámetros”.
3. Entre dos tareas consecutivas hay que enviar el identificador de tarea 0 (sin tarea, “Zero Request”)
y esperar al identificador de respuesta 0 (sin respuesta).
Esto es para asegurarse de que un respuesta “antigua” no sea interpretada como una respuesta
“nueva”.
Paralelamente a la transmisión, el control debe evaluar posibles errores.
Antes y después de la transmisión de parámetros se intercambia cíclicamente el telegrama “ninguna
tarea” entre el control y el controlador de motor.
Para que los valores escritos se guarden a prueba de fallo de red, estos se tienen que
guardar de forma permanente mediante la escritura de PNU 127:2 con el valor 1.
C.3.3 Ejemplo de transmisión de parámetros
Parámetro PNU 440:2 escribir con 4660dFPCC = 0001 1000Subíndice = 0000 0010Número de parámetro = 0000 0001 1011 1000Datos útiles = 0000 0000 0000 0000 0001 0010 0011 0100
Parámetro escrito correctamenteFPCS = 0001 0101Subíndice = 0000 0010Número de parámetro = 0000 0001 1011 1000Datos útiles = 0000 0000 0000 0000 0001 0010 0011 0100
Sistema de mando Controlador del motor
Fig. C.1 Ejemplo de secuencia de transmisión de parámetros
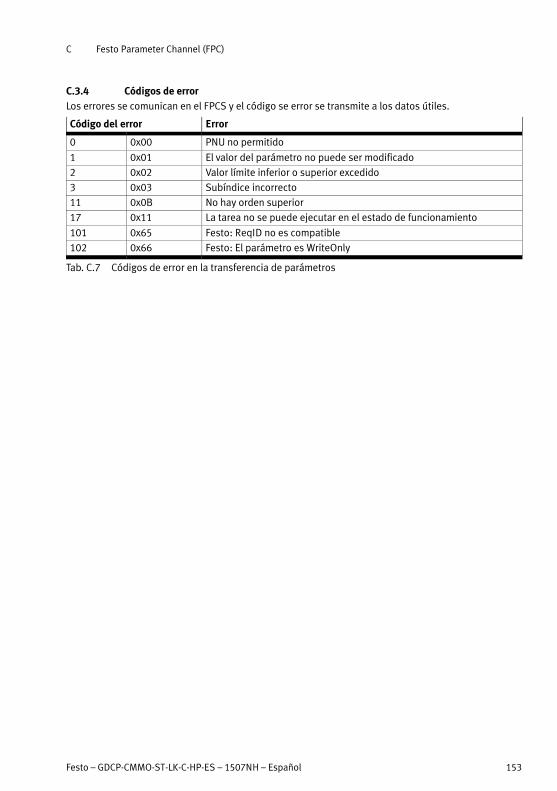
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 153
C.3.4 Códigos de errorLos errores se comunican en el FPCS y el código se error se transmite a los datos útiles.
Código del error Error
0 0x00 PNU no permitido
1 0x01 El valor del parámetro no puede ser modificado
2 0x02 Valor límite inferior o superior excedido
3 0x03 Subíndice incorrecto
11 0x0B No hay orden superior
17 0x11 La tarea no se puede ejecutar en el estado de funcionamiento
101 0x65 Festo: ReqID no es compatible
102 0x66 Festo: El parámetro es WriteOnly
Tab. C.7 Códigos de error en la transferencia de parámetros
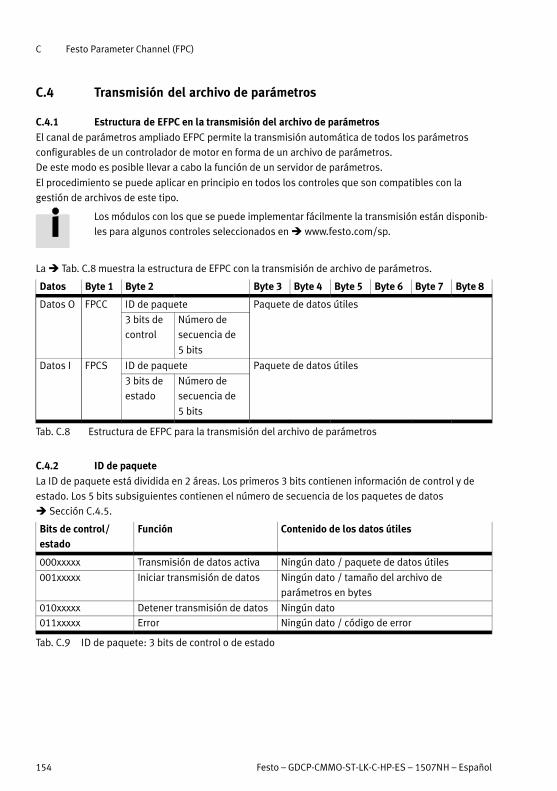
C Festo Parameter Channel (FPC)
154 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
C.4 Transmisión del archivo de parámetros
C.4.1 Estructura de EFPC en la transmisión del archivo de parámetros
El canal de parámetros ampliado EFPC permite la transmisión automática de todos los parámetros
configurables de un controlador de motor en forma de un archivo de parámetros.
De este modo es posible llevar a cabo la función de un servidor de parámetros.
El procedimiento se puede aplicar en principio en todos los controles que son compatibles con la
gestión de archivos de este tipo.
Los módulos con los que se puede implementar fácilmente la transmisión están disponib
les para algunos controles seleccionados en � www.festo.com/sp.
La � Tab. C.8 muestra la estructura de EFPC con la transmisión de archivo de parámetros.
Datos Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
Datos O FPCC ID de paquete Paquete de datos útiles
3 bits de
control
Número de
secuencia de
5 bits
Datos I FPCS ID de paquete Paquete de datos útiles
3 bits de
estado
Número de
secuencia de
5 bits
Tab. C.8 Estructura de EFPC para la transmisión del archivo de parámetros
C.4.2 ID de paquete
La ID de paquete está dividida en 2 áreas. Los primeros 3 bits contienen información de control y de
estado. Los 5 bits subsiguientes contienen el número de secuencia de los paquetes de datos
� Sección C.4.5.
Bits de control/estado
Función Contenido de los datos útiles
000xxxxx Transmisión de datos activa Ningún dato / paquete de datos útiles
001xxxxx Iniciar transmisión de datos Ningún dato / tamaño del archivo de
parámetros en bytes
010xxxxx Detener transmisión de datos Ningún dato
011xxxxx Error Ningún dato / código de error
Tab. C.9 ID de paquete: 3 bits de control o de estado
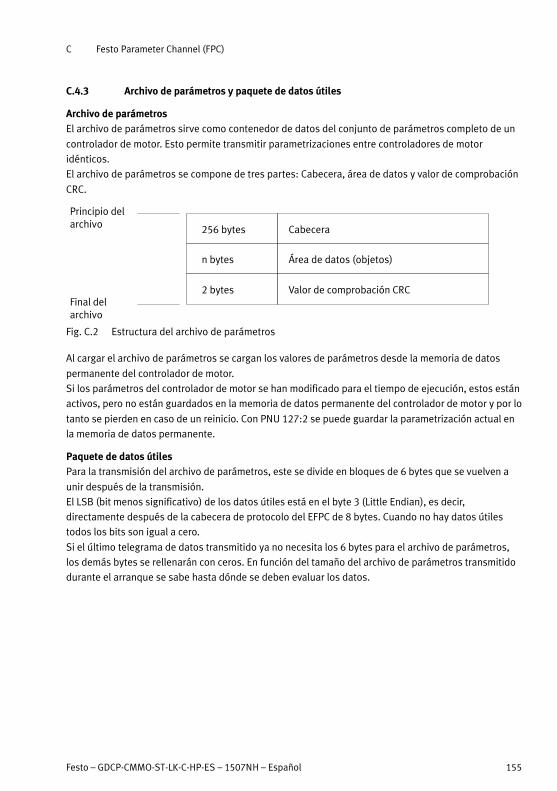
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 155
C.4.3 Archivo de parámetros y paquete de datos útiles
Archivo de parámetrosEl archivo de parámetros sirve como contenedor de datos del conjunto de parámetros completo de un
controlador de motor. Esto permite transmitir parametrizaciones entre controladores de motor
idénticos.
El archivo de parámetros se compone de tres partes: Cabecera, área de datos y valor de comprobación
CRC.
Principio delarchivo 256 bytes Cabecera
n bytes Área de datos (objetos)
2 bytes Valor de comprobación CRCFinal delarchivo
Fig. C.2 Estructura del archivo de parámetros
Al cargar el archivo de parámetros se cargan los valores de parámetros desde la memoria de datos
permanente del controlador de motor.
Si los parámetros del controlador de motor se han modificado para el tiempo de ejecución, estos están
activos, pero no están guardados en la memoria de datos permanente del controlador de motor y por lo
tanto se pierden en caso de un reinicio. Con PNU 127:2 se puede guardar la parametrización actual en
la memoria de datos permanente.
Paquete de datos útilesPara la transmisión del archivo de parámetros, este se divide en bloques de 6 bytes que se vuelven a
unir después de la transmisión.
El LSB (bit menos significativo) de los datos útiles está en el byte 3 (Little Endian), es decir,
directamente después de la cabecera de protocolo del EFPC de 8 bytes. Cuando no hay datos útiles
todos los bits son igual a cero.
Si el último telegrama de datos transmitido ya no necesita los 6 bytes para el archivo de parámetros,
los demás bytes se rellenarán con ceros. En función del tamaño del archivo de parámetros transmitido
durante el arranque se sabe hasta dónde se deben evaluar los datos.
C Festo Parameter Channel (FPC)
156 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
C.4.4 Comprobación y activación del archivo de parámetrosEl controlador de motor comprueba automáticamente si un archivo de parámetros transmitido es
compatible. Esto tiene lugar cuando la descarga ha finalizado y se deben cargar los parámetros, pero
también directamente después de enviar la información de la cabecera. Si el archivo de parámetros no
es compatible, el controlador de motor responde con un error y el correspondiente código de error.
Activación del archivo de parámetros transmitido
Mediante la descarga, al archivo de parámetros se guarda en la memoria del controlador de motor
(memoria permanente) y el archivo guardado anteriormente (memoria permanente) se borra una vez
comprobado con éxito el nuevo archivo. Esto no influye inicialmente en los parámetros activos
actualmente.
Los parámetros del nuevo archivo de parámetros se activan solo después de:
� Reiniciar el controlador de motor
– Activar PNU 127, subíndice 3 “Reset Device”
– Conectar/desconectar la alimentación
– Menú Plugin de FCT [Componente] [Online] [Reiniciar controlador] ( [Component] [Online] [Restart
Controller] ).
� Activar PNU 127, subíndice 4 “Cargar valores de parámetros del archivo de parámetros”
No obstante, con este método no se aceptan los parámetros modificados de la gestión de errores.
C.4.5 Secuencia de la transmisión del archivo de parámetros
La la transmisión del archivo de parámetros se realiza conforme a la siguiente secuencia:
1. Iniciar la transmisión de datos. El número de secuencia empieza por 0.
2. Transmitir paquete de datos útiles y contar número de secuencia en orden ascendente.
Como handshake, después de la recepción del paquete de datos tiene lugar respectivamente la
respuesta con la misma ID de paquete. Los datos del archivo de parámetros se transmiten a partir
del número de secuencia 1. Si el número de secuencia ha llegado a su valor más alto 31, se vuelve a
empezar a contar desde 0.
El paso intermedio entre “ninguna tarea” se suprime en esta variante de EFPC porque la ID de
paquete se modifica en cada telegrama nuevo.
3. Transmisión de datos finalizada o detener transmisión de datos.
Paralelamente a la transmisión, el control debe evaluar posibles errores.
Antes y después de la transmisión de datos se intercambia cíclicamente el telegrama “ninguna tarea”
entre el control y el controlador de motor.
Una parada o un mensaje de error se puede escribir en cualquier momento en los bits de control e
interrumpe la carga o la descarga. Al hacerlo no tiene lugar ninguna comprobación del número de
secuencia.
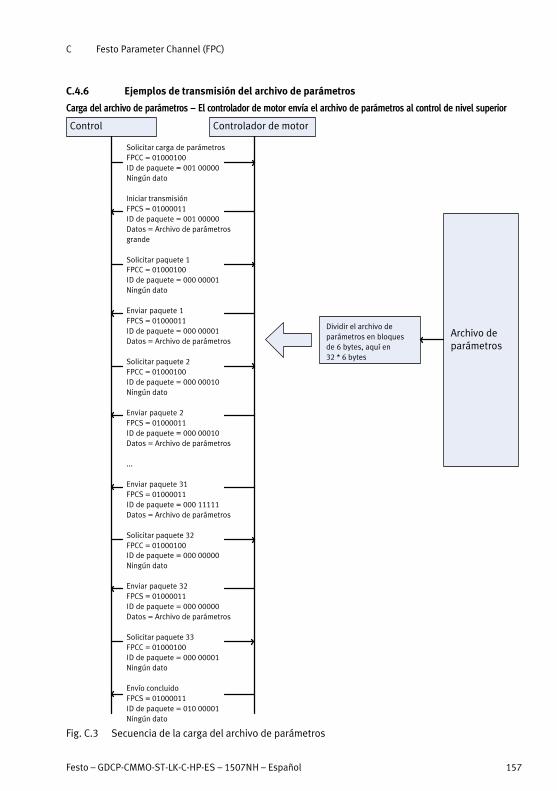
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 157
C.4.6 Ejemplos de transmisión del archivo de parámetros
Carga del archivo de parámetros – El controlador de motor envía el archivo de parámetros al control de nivel superior
Solicitar carga de parámetrosFPCC = 01000100ID de paquete = 001 00000Ningún dato
Iniciar transmisiónFPCS = 01000011ID de paquete = 001 00000Datos = Archivo de parámetrosgrande
Solicitar paquete 1FPCC = 01000100ID de paquete = 000 00001Ningún dato
Enviar paquete 1FPCS = 01000011ID de paquete = 000 00001Datos = Archivo de parámetros
Solicitar paquete 2FPCC = 01000100ID de paquete = 000 00010Ningún dato
Enviar paquete 2FPCS = 01000011ID de paquete = 000 00010Datos = Archivo de parámetros
...
Enviar paquete 31FPCS = 01000011ID de paquete = 000 11111Datos = Archivo de parámetros
Solicitar paquete 32FPCC = 01000100ID de paquete = 000 00000Ningún dato
Enviar paquete 32FPCS = 01000011ID de paquete = 000 00000Datos = Archivo de parámetros
Solicitar paquete 33FPCC = 01000100ID de paquete = 000 00001Ningún dato
Envío concluidoFPCS = 01000011ID de paquete = 010 00001Ningún dato
Control Controlador de motor
Archivo deparámetros
Dividir el archivo deparámetros en bloquesde 6 bytes, aquí en 32 * 6 bytes
Fig. C.3 Secuencia de la carga del archivo de parámetros
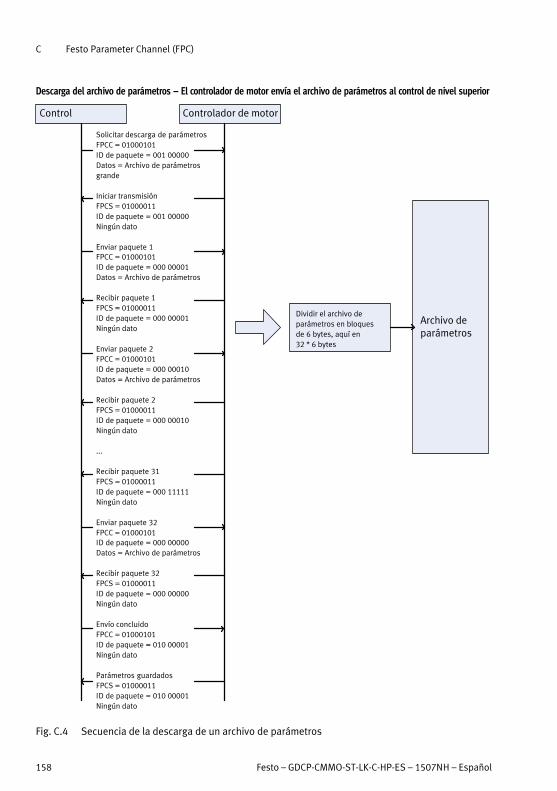
C Festo Parameter Channel (FPC)
158 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Descarga del archivo de parámetros – El controlador de motor envía el archivo de parámetros al control de nivel superior
Solicitar descarga de parámetrosFPCC = 01000101ID de paquete = 001 00000Datos = Archivo de parámetrosgrande
Iniciar transmisiónFPCS = 01000011ID de paquete = 001 00000Ningún dato
Enviar paquete 1FPCC = 01000101ID de paquete = 000 00001Datos = Archivo de parámetros
Recibir paquete 1FPCS = 01000011ID de paquete = 000 00001Ningún dato
Enviar paquete 2FPCC = 01000101ID de paquete = 000 00010Datos = Archivo de parámetros
Recibir paquete 2FPCS = 01000011ID de paquete = 000 00010Ningún dato
...
Recibir paquete 31FPCS = 01000011ID de paquete = 000 11111Ningún dato
Enviar paquete 32FPCC = 01000101ID de paquete = 000 00000Datos = Archivo de parámetros
Recibir paquete 32FPCS = 01000011ID de paquete = 000 00000Ningún dato
Envío concluidoFPCC = 01000101ID de paquete = 010 00001Ningún dato
Parámetros guardadosFPCS = 01000011ID de paquete = 010 00001Ningún dato
Control Controlador de motor
Archivo deparámetros
Dividir el archivo deparámetros en bloquesde 6 bytes, aquí en 32 * 6 bytes
Fig. C.4 Secuencia de la descarga de un archivo de parámetros
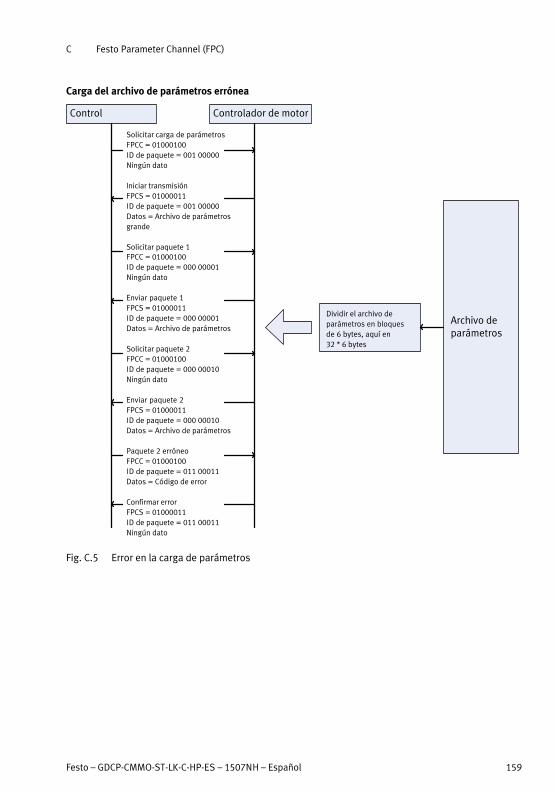
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 159
Carga del archivo de parámetros errónea
Solicitar carga de parámetrosFPCC = 01000100ID de paquete = 001 00000Ningún dato
Iniciar transmisiónFPCS = 01000011ID de paquete = 001 00000Datos = Archivo de parámetrosgrande
Solicitar paquete 1FPCC = 01000100ID de paquete = 000 00001Ningún dato
Enviar paquete 1FPCS = 01000011ID de paquete = 000 00001Datos = Archivo de parámetros
Solicitar paquete 2FPCC = 01000100ID de paquete = 000 00010Ningún dato
Enviar paquete 2FPCS = 01000011ID de paquete = 000 00010Datos = Archivo de parámetros
Paquete 2 erróneoFPCC = 01000100ID de paquete = 011 00011Datos = Código de error
Confirmar errorFPCS = 01000011ID de paquete = 011 00011Ningún dato
Control Controlador de motor
Archivo deparámetros
Dividir el archivo deparámetros en bloquesde 6 bytes, aquí en 32 * 6 bytes
Fig. C.5 Error en la carga de parámetros
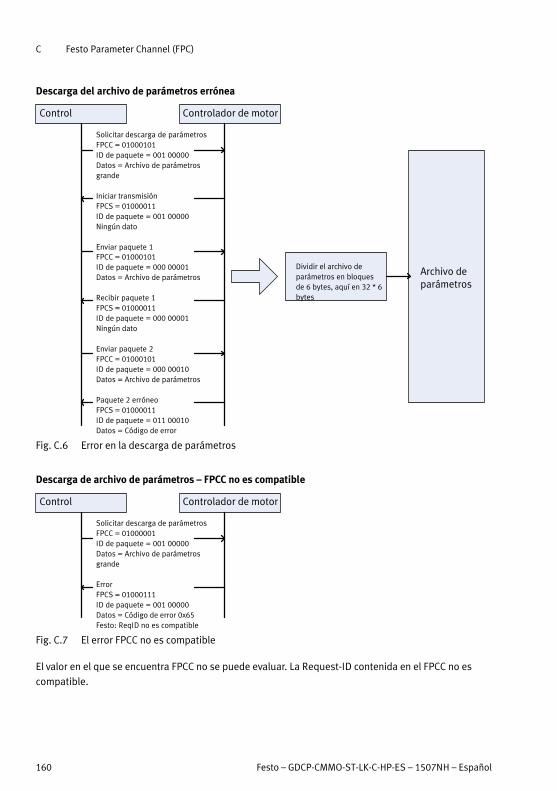
C Festo Parameter Channel (FPC)
160 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Descarga del archivo de parámetros errónea
Solicitar descarga de parámetrosFPCC = 01000101ID de paquete = 001 00000Datos = Archivo de parámetrosgrande
Iniciar transmisiónFPCS = 01000011ID de paquete = 001 00000Ningún dato
Enviar paquete 1FPCC = 01000101ID de paquete = 000 00001Datos = Archivo de parámetros
Recibir paquete 1FPCS = 01000011ID de paquete = 000 00001Ningún dato
Enviar paquete 2FPCC = 01000101ID de paquete = 000 00010Datos = Archivo de parámetros
Paquete 2 erróneoFPCS = 01000011ID de paquete = 011 00010Datos = Código de error
Control Controlador de motor
Archivo deparámetros
Dividir el archivo deparámetros en bloquesde 6 bytes, aquí en 32 * 6bytes
Fig. C.6 Error en la descarga de parámetros
Descarga de archivo de parámetros – FPCC no es compatible
Solicitar descarga de parámetrosFPCC = 01000001ID de paquete = 001 00000Datos = Archivo de parámetrosgrande
ErrorFPCS = 01000111ID de paquete = 001 00000Datos = Código de error 0x65Festo: ReqID no es compatible
Control Controlador de motor
Fig. C.7 El error FPCC no es compatible
El valor en el que se encuentra FPCC no se puede evaluar. La Request-ID contenida en el FPCC no es
compatible.
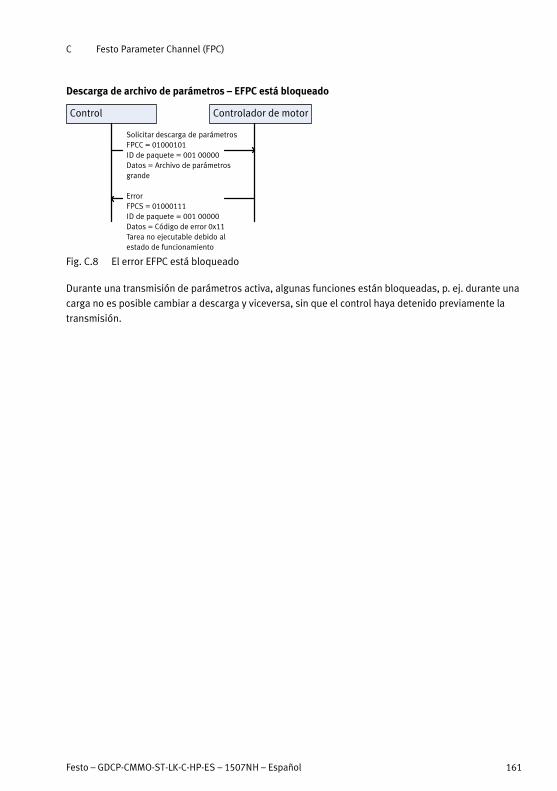
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 161
Descarga de archivo de parámetros – EFPC está bloqueado
Solicitar descarga de parámetrosFPCC = 01000101ID de paquete = 001 00000Datos = Archivo de parámetrosgrande
ErrorFPCS = 01000111ID de paquete = 001 00000Datos = Código de error 0x11Tarea no ejecutable debido alestado de funcionamiento
Control Controlador de motor
Fig. C.8 El error EFPC está bloqueado
Durante una transmisión de parámetros activa, algunas funciones están bloqueadas, p. ej. durante una
carga no es posible cambiar a descarga y viceversa, sin que el control haya detenido previamente la
transmisión.
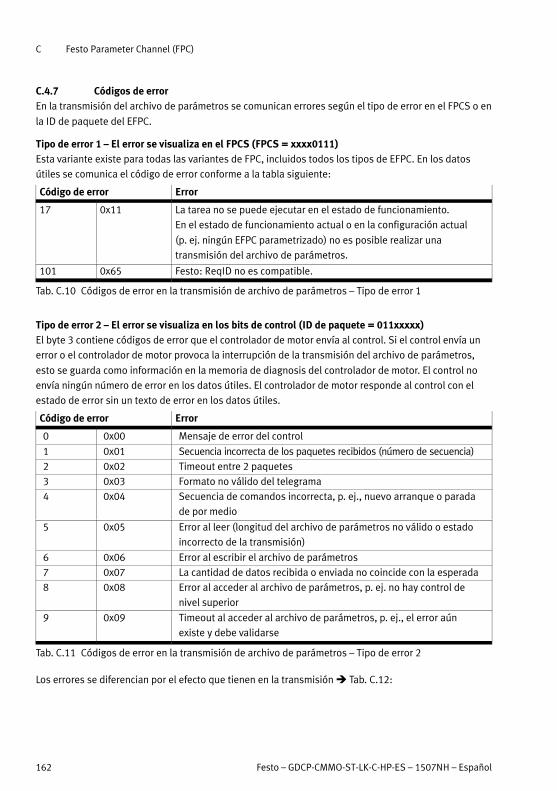
C Festo Parameter Channel (FPC)
162 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
C.4.7 Códigos de errorEn la transmisión del archivo de parámetros se comunican errores según el tipo de error en el FPCS o en
la ID de paquete del EFPC.
Tipo de error 1 – El error se visualiza en el FPCS (FPCS = xxxx0111)Esta variante existe para todas las variantes de FPC, incluidos todos los tipos de EFPC. En los datos
útiles se comunica el código de error conforme a la tabla siguiente:
Código de error Error
17 0x11 La tarea no se puede ejecutar en el estado de funcionamiento.
En el estado de funcionamiento actual o en la configuración actual
(p. ej. ningún EFPC parametrizado) no es posible realizar una
transmisión del archivo de parámetros.
101 0x65 Festo: ReqID no es compatible.
Tab. C.10 Códigos de error en la transmisión de archivo de parámetros – Tipo de error 1
Tipo de error 2 – El error se visualiza en los bits de control (ID de paquete = 011xxxxx)El byte 3 contiene códigos de error que el controlador de motor envía al control. Si el control envía un
error o el controlador de motor provoca la interrupción de la transmisión del archivo de parámetros,
esto se guarda como información en la memoria de diagnosis del controlador de motor. El control no
envía ningún número de error en los datos útiles. El controlador de motor responde al control con el
estado de error sin un texto de error en los datos útiles.
Código de error Error
0 0x00 Mensaje de error del control
1 0x01 Secuencia incorrecta de los paquetes recibidos (número de secuencia)
2 0x02 Timeout entre 2 paquetes
3 0x03 Formato no válido del telegrama
4 0x04 Secuencia de comandos incorrecta, p. ej., nuevo arranque o parada
de por medio
5 0x05 Error al leer (longitud del archivo de parámetros no válido o estado
incorrecto de la transmisión)
6 0x06 Error al escribir el archivo de parámetros
7 0x07 La cantidad de datos recibida o enviada no coincide con la esperada
8 0x08 Error al acceder al archivo de parámetros, p. ej. no hay control de
nivel superior
9 0x09 Timeout al acceder al archivo de parámetros, p. ej., el error aún
existe y debe validarse
Tab. C.11 Códigos de error en la transmisión de archivo de parámetros – Tipo de error 2
Los errores se diferencian por el efecto que tienen en la transmisión � Tab. C.12:
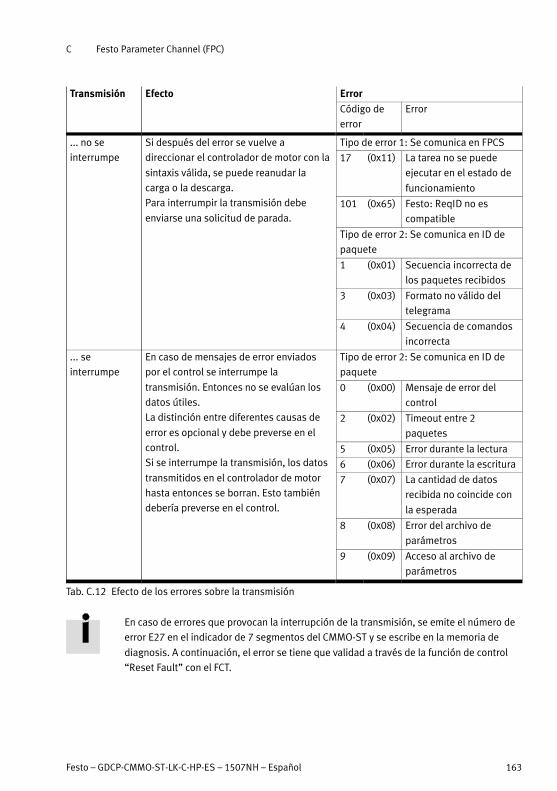
C Festo Parameter Channel (FPC)
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 163
Transmisión Efecto Error
Código de
error
Error
... no se
interrumpe
Si después del error se vuelve a
direccionar el controlador de motor con la
sintaxis válida, se puede reanudar la
carga o la descarga.
Para interrumpir la transmisión debe
enviarse una solicitud de parada.
Tipo de error 1: Se comunica en FPCS
17 (0x11) La tarea no se puede
ejecutar en el estado de
funcionamiento
101 (0x65) Festo: ReqID no es
compatible
Tipo de error 2: Se comunica en ID de
paquete
1 (0x01) Secuencia incorrecta de
los paquetes recibidos
3 (0x03) Formato no válido del
telegrama
4 (0x04) Secuencia de comandos
incorrecta
... se
interrumpe
En caso de mensajes de error enviados
por el control se interrumpe la
transmisión. Entonces no se evalúan los
datos útiles.
La distinción entre diferentes causas de
error es opcional y debe preverse en el
control.
Si se interrumpe la transmisión, los datos
transmitidos en el controlador de motor
hasta entonces se borran. Esto también
debería preverse en el control.
Tipo de error 2: Se comunica en ID de
paquete
0 (0x00) Mensaje de error del
control
2 (0x02) Timeout entre 2
paquetes
5 (0x05) Error durante la lectura
6 (0x06) Error durante la escritura
7 (0x07) La cantidad de datos
recibida no coincide con
la esperada
8 (0x08) Error del archivo de
parámetros
9 (0x09) Acceso al archivo de
parámetros
Tab. C.12 Efecto de los errores sobre la transmisión
En caso de errores que provocan la interrupción de la transmisión, se emite el número de
error E27 en el indicador de 7 segmentos del CMMO-ST y se escribe en la memoria de
diagnosis. A continuación, el error se tiene que validad a través de la función de control
“Reset Fault” con el FCT.

D Mensajes de diagnosis
164 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
D Mensajes de diagnosis
Explicación de la clasificación parametrizable, reacciones ante errores, opciones de
diagnosis y validación � 7.2.2.
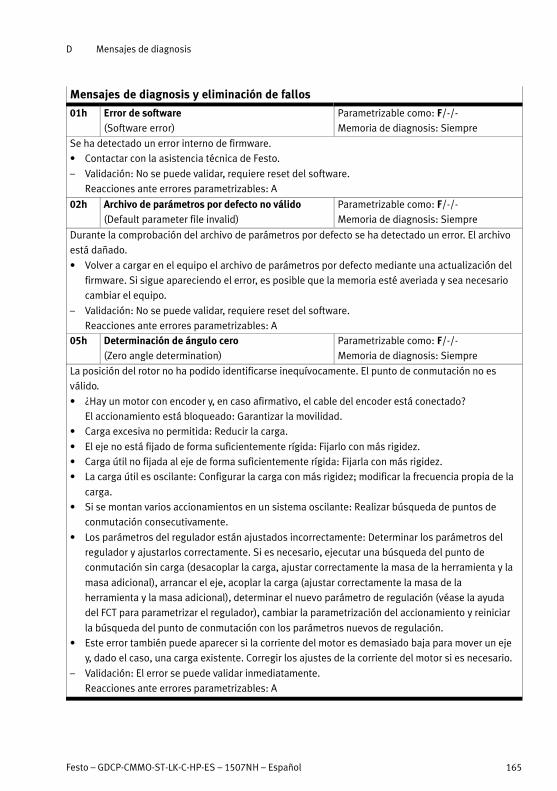
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 165
Mensajes de diagnosis y eliminación de fallos
01h Error de software(Software error)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Se ha detectado un error interno de firmware.
� Contactar con la asistencia técnica de Festo.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
02h Archivo de parámetros por defecto no válido(Default parameter file invalid)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Durante la comprobación del archivo de parámetros por defecto se ha detectado un error. El archivo
está dañado.
� Volver a cargar en el equipo el archivo de parámetros por defecto mediante una actualización del
firmware. Si sigue apareciendo el error, es posible que la memoria esté averiada y sea necesario
cambiar el equipo.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
05h Determinación de ángulo cero(Zero angle determination)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
La posición del rotor no ha podido identificarse inequívocamente. El punto de conmutación no es
válido.
� ¿Hay un motor con encoder y, en caso afirmativo, el cable del encoder está conectado?
El accionamiento está bloqueado: Garantizar la movilidad.
� Carga excesiva no permitida: Reducir la carga.
� El eje no está fijado de forma suficientemente rígida: Fijarlo con más rigidez.
� Carga útil no fijada al eje de forma suficientemente rígida: Fijarla con más rigidez.
� La carga útil es oscilante: Configurar la carga con más rigidez; modificar la frecuencia propia de la
carga.
� Si se montan varios accionamientos en un sistema oscilante: Realizar búsqueda de puntos de
conmutación consecutivamente.
� Los parámetros del regulador están ajustados incorrectamente: Determinar los parámetros del
regulador y ajustarlos correctamente. Si es necesario, ejecutar una búsqueda del punto de
conmutación sin carga (desacoplar la carga, ajustar correctamente la masa de la herramienta y la
masa adicional), arrancar el eje, acoplar la carga (ajustar correctamente la masa de la
herramienta y la masa adicional), determinar el nuevo parámetro de regulación (véase la ayuda
del FCT para parametrizar el regulador), cambiar la parametrización del accionamiento y reiniciar
la búsqueda del punto de conmutación con los parámetros nuevos de regulación.
� Este error también puede aparecer si la corriente del motor es demasiado baja para mover un eje
y, dado el caso, una carga existente. Corregir los ajustes de la corriente del motor si es necesario.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A
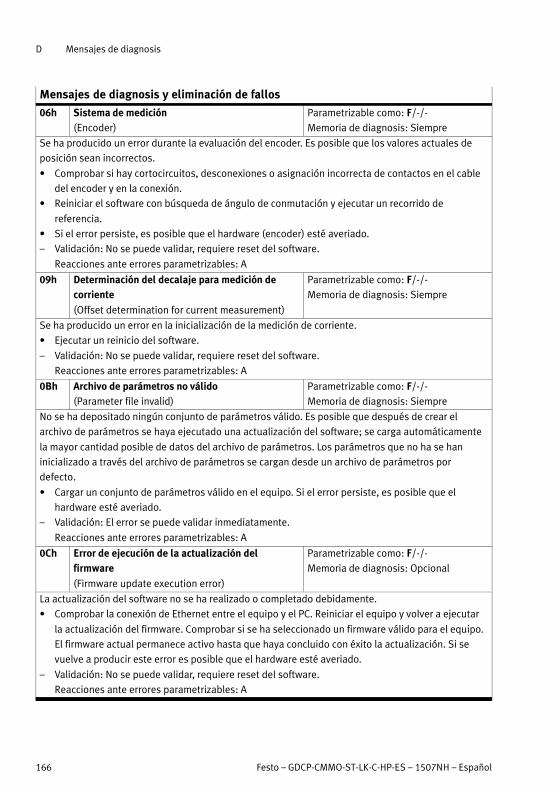
D Mensajes de diagnosis
166 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Mensajes de diagnosis y eliminación de fallos
06h Sistema de medición(Encoder)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Se ha producido un error durante la evaluación del encoder. Es posible que los valores actuales de
posición sean incorrectos.
� Comprobar si hay cortocircuitos, desconexiones o asignación incorrecta de contactos en el cable
del encoder y en la conexión.
� Reiniciar el software con búsqueda de ángulo de conmutación y ejecutar un recorrido de
referencia.
� Si el error persiste, es posible que el hardware (encoder) esté averiado.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
09h Determinación del decalaje para medición decorriente
(Offset determination for current measurement)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Se ha producido un error en la inicialización de la medición de corriente.
� Ejecutar un reinicio del software.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
0Bh Archivo de parámetros no válido(Parameter file invalid)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
No se ha depositado ningún conjunto de parámetros válido. Es posible que después de crear el
archivo de parámetros se haya ejecutado una actualización del software; se carga automáticamente
la mayor cantidad posible de datos del archivo de parámetros. Los parámetros que no ha se han
inicializado a través del archivo de parámetros se cargan desde un archivo de parámetros por
defecto.
� Cargar un conjunto de parámetros válido en el equipo. Si el error persiste, es posible que el
hardware esté averiado.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A
0Ch Error de ejecución de la actualización delfirmware
(Firmware update execution error)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
La actualización del software no se ha realizado o completado debidamente.
� Comprobar la conexión de Ethernet entre el equipo y el PC. Reiniciar el equipo y volver a ejecutar
la actualización del firmware. Comprobar si se ha seleccionado un firmware válido para el equipo.
El firmware actual permanece activo hasta que haya concluido con éxito la actualización. Si se
vuelve a producir este error es posible que el hardware esté averiado.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
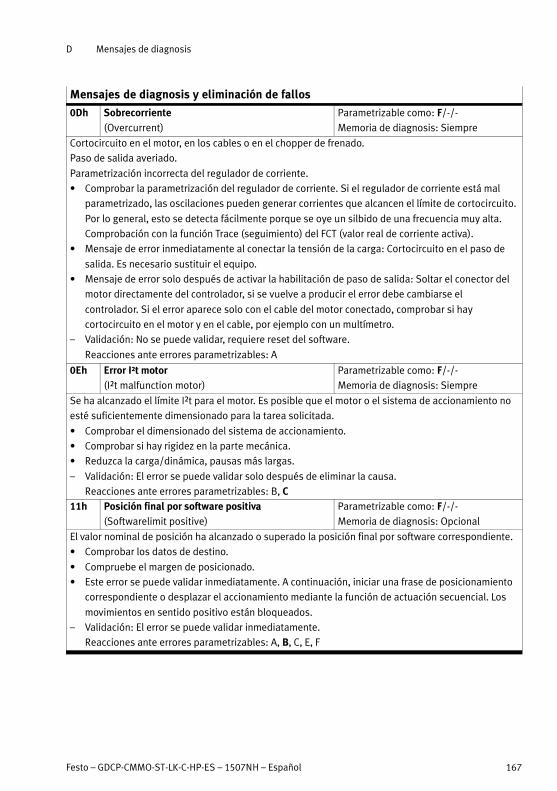
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 167
Mensajes de diagnosis y eliminación de fallos
0Dh Sobrecorriente(Overcurrent)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Cortocircuito en el motor, en los cables o en el chopper de frenado.
Paso de salida averiado.
Parametrización incorrecta del regulador de corriente.
� Comprobar la parametrización del regulador de corriente. Si el regulador de corriente está mal
parametrizado, las oscilaciones pueden generar corrientes que alcancen el límite de cortocircuito.
Por lo general, esto se detecta fácilmente porque se oye un silbido de una frecuencia muy alta.
Comprobación con la función Trace (seguimiento) del FCT (valor real de corriente activa).
� Mensaje de error inmediatamente al conectar la tensión de la carga: Cortocircuito en el paso de
salida. Es necesario sustituir el equipo.
� Mensaje de error solo después de activar la habilitación de paso de salida: Soltar el conector del
motor directamente del controlador, si se vuelve a producir el error debe cambiarse el
controlador. Si el error aparece solo con el cable del motor conectado, comprobar si hay
cortocircuito en el motor y en el cable, por ejemplo con un multímetro.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
0Eh Error I²t motor(I²t malfunction motor)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Se ha alcanzado el límite I²t para el motor. Es posible que el motor o el sistema de accionamiento no
esté suficientemente dimensionado para la tarea solicitada.
� Comprobar el dimensionado del sistema de accionamiento.
� Comprobar si hay rigidez en la parte mecánica.
� Reduzca la carga/dinámica, pausas más largas.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: B, C11h Posición final por software positiva
(Softwarelimit positive)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
El valor nominal de posición ha alcanzado o superado la posición final por software correspondiente.
� Comprobar los datos de destino.
� Compruebe el margen de posicionado.
� Este error se puede validar inmediatamente. A continuación, iniciar una frase de posicionamiento
correspondiente o desplazar el accionamiento mediante la función de actuación secuencial. Los
movimientos en sentido positivo están bloqueados.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A, B, C, E, F
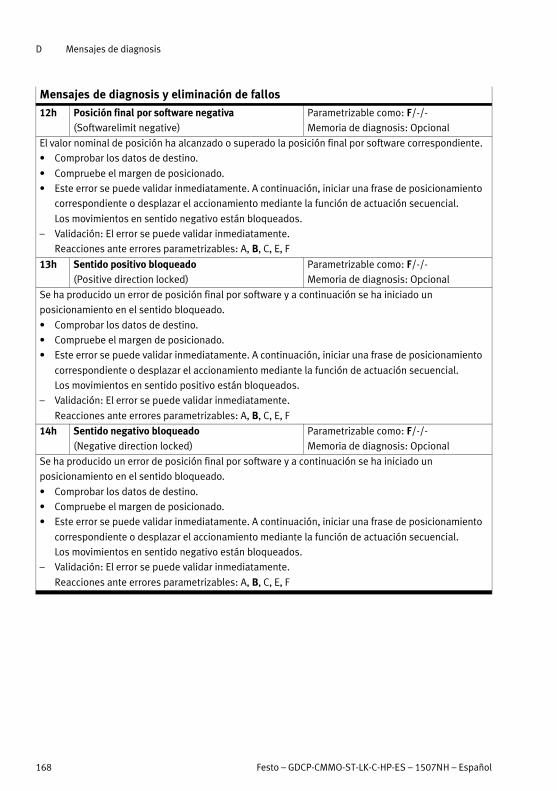
D Mensajes de diagnosis
168 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Mensajes de diagnosis y eliminación de fallos
12h Posición final por software negativa(Softwarelimit negative)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
El valor nominal de posición ha alcanzado o superado la posición final por software correspondiente.
� Comprobar los datos de destino.
� Compruebe el margen de posicionado.
� Este error se puede validar inmediatamente. A continuación, iniciar una frase de posicionamiento
correspondiente o desplazar el accionamiento mediante la función de actuación secuencial.
Los movimientos en sentido negativo están bloqueados.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A, B, C, E, F
13h Sentido positivo bloqueado(Positive direction locked)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Se ha producido un error de posición final por software y a continuación se ha iniciado un
posicionamiento en el sentido bloqueado.
� Comprobar los datos de destino.
� Compruebe el margen de posicionado.
� Este error se puede validar inmediatamente. A continuación, iniciar una frase de posicionamiento
correspondiente o desplazar el accionamiento mediante la función de actuación secuencial.
Los movimientos en sentido positivo están bloqueados.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A, B, C, E, F
14h Sentido negativo bloqueado(Negative direction locked)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Se ha producido un error de posición final por software y a continuación se ha iniciado un
posicionamiento en el sentido bloqueado.
� Comprobar los datos de destino.
� Compruebe el margen de posicionado.
� Este error se puede validar inmediatamente. A continuación, iniciar una frase de posicionamiento
correspondiente o desplazar el accionamiento mediante la función de actuación secuencial.
Los movimientos en sentido negativo están bloqueados.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A, B, C, E, F
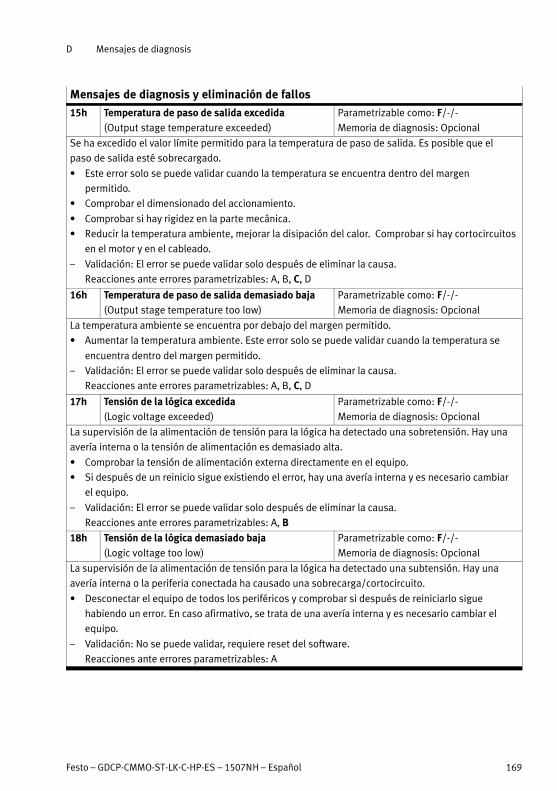
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 169
Mensajes de diagnosis y eliminación de fallos
15h Temperatura de paso de salida excedida(Output stage temperature exceeded)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Se ha excedido el valor límite permitido para la temperatura de paso de salida. Es posible que el
paso de salida esté sobrecargado.
� Este error solo se puede validar cuando la temperatura se encuentra dentro del margen
permitido.
� Comprobar el dimensionado del accionamiento.
� Comprobar si hay rigidez en la parte mecánica.
� Reducir la temperatura ambiente, mejorar la disipación del calor. Comprobar si hay cortocircuitos
en el motor y en el cableado.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: A, B, C, D
16h Temperatura de paso de salida demasiado baja(Output stage temperature too low)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
La temperatura ambiente se encuentra por debajo del margen permitido.
� Aumentar la temperatura ambiente. Este error solo se puede validar cuando la temperatura se
encuentra dentro del margen permitido.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: A, B, C, D
17h Tensión de la lógica excedida(Logic voltage exceeded)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
La supervisión de la alimentación de tensión para la lógica ha detectado una sobretensión. Hay una
avería interna o la tensión de alimentación es demasiado alta.
� Comprobar la tensión de alimentación externa directamente en el equipo.
� Si después de un reinicio sigue existiendo el error, hay una avería interna y es necesario cambiar
el equipo.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: A, B
18h Tensión de la lógica demasiado baja(Logic voltage too low)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
La supervisión de la alimentación de tensión para la lógica ha detectado una subtensión. Hay una
avería interna o la periferia conectada ha causado una sobrecarga/cortocircuito.
� Desconectar el equipo de todos los periféricos y comprobar si después de reiniciarlo sigue
habiendo un error. En caso afirmativo, se trata de una avería interna y es necesario cambiar el
equipo.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: A
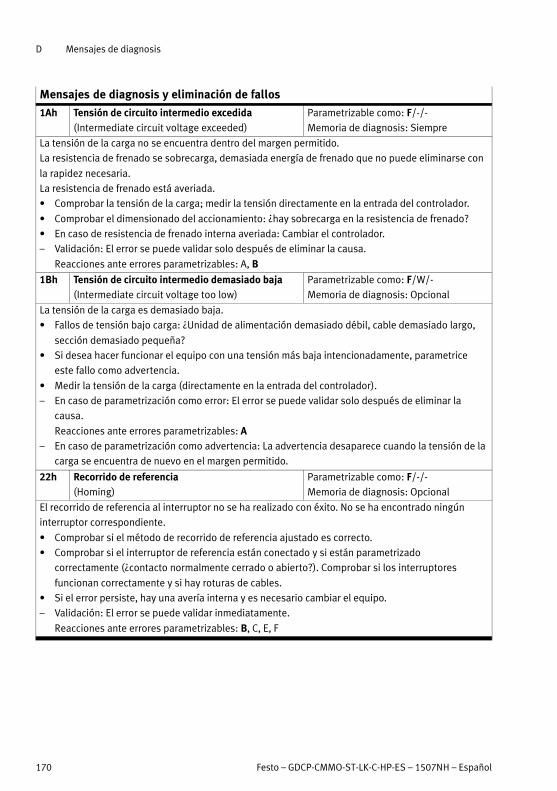
D Mensajes de diagnosis
170 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Mensajes de diagnosis y eliminación de fallos
1Ah Tensión de circuito intermedio excedida(Intermediate circuit voltage exceeded)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
La tensión de la carga no se encuentra dentro del margen permitido.
La resistencia de frenado se sobrecarga, demasiada energía de frenado que no puede eliminarse con
la rapidez necesaria.
La resistencia de frenado está averiada.
� Comprobar la tensión de la carga; medir la tensión directamente en la entrada del controlador.
� Comprobar el dimensionado del accionamiento: ¿hay sobrecarga en la resistencia de frenado?
� En caso de resistencia de frenado interna averiada: Cambiar el controlador.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: A, B
1Bh Tensión de circuito intermedio demasiado baja(Intermediate circuit voltage too low)
Parametrizable como: F/W/-
Memoria de diagnosis: Opcional
La tensión de la carga es demasiado baja.
� Fallos de tensión bajo carga: ¿Unidad de alimentación demasiado débil, cable demasiado largo,
sección demasiado pequeña?
� Si desea hacer funcionar el equipo con una tensión más baja intencionadamente, parametrice
este fallo como advertencia.
� Medir la tensión de la carga (directamente en la entrada del controlador).
– En caso de parametrización como error: El error se puede validar solo después de eliminar la
causa.
Reacciones ante errores parametrizables: A– En caso de parametrización como advertencia: La advertencia desaparece cuando la tensión de la
carga se encuentra de nuevo en el margen permitido.
22h Recorrido de referencia(Homing)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
El recorrido de referencia al interruptor no se ha realizado con éxito. No se ha encontrado ningún
interruptor correspondiente.
� Comprobar si el método de recorrido de referencia ajustado es correcto.
� Comprobar si el interruptor de referencia están conectado y si están parametrizado
correctamente (¿contacto normalmente cerrado o abierto?). Comprobar si los interruptores
funcionan correctamente y si hay roturas de cables.
� Si el error persiste, hay una avería interna y es necesario cambiar el equipo.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, E, F
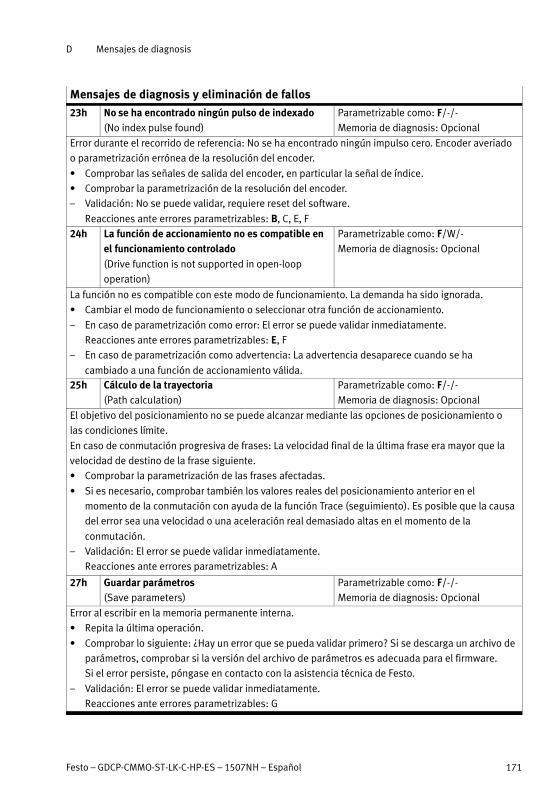
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 171
Mensajes de diagnosis y eliminación de fallos
23h No se ha encontrado ningún pulso de indexado(No index pulse found)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Error durante el recorrido de referencia: No se ha encontrado ningún impulso cero. Encoder averiado
o parametrización errónea de la resolución del encoder.
� Comprobar las señales de salida del encoder, en particular la señal de índice.
� Comprobar la parametrización de la resolución del encoder.
– Validación: No se puede validar, requiere reset del software.
Reacciones ante errores parametrizables: B, C, E, F
24h La función de accionamiento no es compatible enel funcionamiento controlado
(Drive function is not supported in open-loop
operation)
Parametrizable como: F/W/-
Memoria de diagnosis: Opcional
La función no es compatible con este modo de funcionamiento. La demanda ha sido ignorada.
� Cambiar el modo de funcionamiento o seleccionar otra función de accionamiento.
– En caso de parametrización como error: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: E, F
– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha
cambiado a una función de accionamiento válida.25h Cálculo de la trayectoria
(Path calculation)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
El objetivo del posicionamiento no se puede alcanzar mediante las opciones de posicionamiento o
las condiciones límite.
En caso de conmutación progresiva de frases: La velocidad final de la última frase era mayor que la
velocidad de destino de la frase siguiente.
� Comprobar la parametrización de las frases afectadas.
� Si es necesario, comprobar también los valores reales del posicionamiento anterior en el
momento de la conmutación con ayuda de la función Trace (seguimiento). Es posible que la causa
del error sea una velocidad o una aceleración real demasiado altas en el momento de la
conmutación.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A
27h Guardar parámetros(Save parameters)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Error al escribir en la memoria permanente interna.
� Repita la última operación.
� Comprobar lo siguiente: ¿Hay un error que se pueda validar primero? Si se descarga un archivo de
parámetros, comprobar si la versión del archivo de parámetros es adecuada para el firmware.
Si el error persiste, póngase en contacto con la asistencia técnica de Festo.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: G
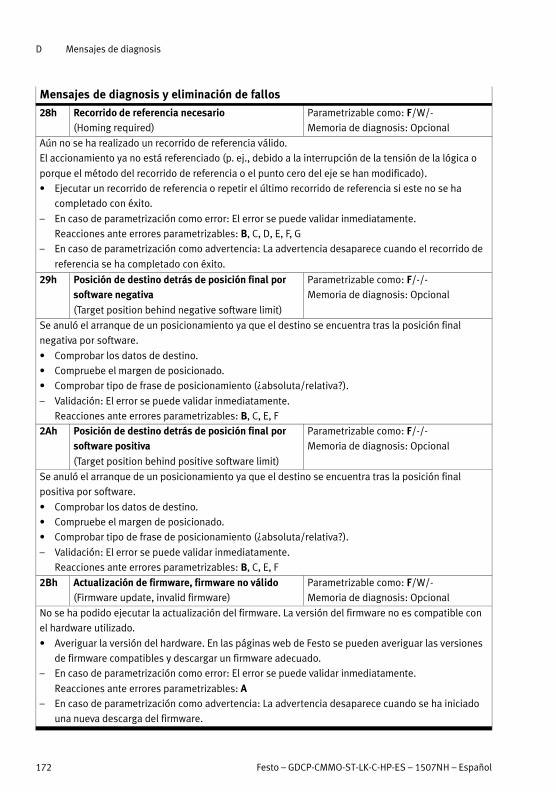
D Mensajes de diagnosis
172 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Mensajes de diagnosis y eliminación de fallos
28h Recorrido de referencia necesario(Homing required)
Parametrizable como: F/W/-
Memoria de diagnosis: Opcional
Aún no se ha realizado un recorrido de referencia válido.
El accionamiento ya no está referenciado (p. ej., debido a la interrupción de la tensión de la lógica o
porque el método del recorrido de referencia o el punto cero del eje se han modificado).
� Ejecutar un recorrido de referencia o repetir el último recorrido de referencia si este no se ha
completado con éxito.
– En caso de parametrización como error: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, D, E, F, G
– En caso de parametrización como advertencia: La advertencia desaparece cuando el recorrido de
referencia se ha completado con éxito.
29h Posición de destino detrás de posición final porsoftware negativa
(Target position behind negative software limit)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Se anuló el arranque de un posicionamiento ya que el destino se encuentra tras la posición final
negativa por software.
� Comprobar los datos de destino.
� Compruebe el margen de posicionado.
� Comprobar tipo de frase de posicionamiento (¿absoluta/relativa?).
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, E, F
2Ah Posición de destino detrás de posición final porsoftware positiva
(Target position behind positive software limit)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Se anuló el arranque de un posicionamiento ya que el destino se encuentra tras la posición final
positiva por software.
� Comprobar los datos de destino.
� Compruebe el margen de posicionado.
� Comprobar tipo de frase de posicionamiento (¿absoluta/relativa?).
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, E, F
2Bh Actualización de firmware, firmware no válido(Firmware update, invalid firmware)
Parametrizable como: F/W/-
Memoria de diagnosis: Opcional
No se ha podido ejecutar la actualización del firmware. La versión del firmware no es compatible con
el hardware utilizado.
� Averiguar la versión del hardware. En las páginas web de Festo se pueden averiguar las versiones
de firmware compatibles y descargar un firmware adecuado.
– En caso de parametrización como error: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha iniciado
una nueva descarga del firmware.
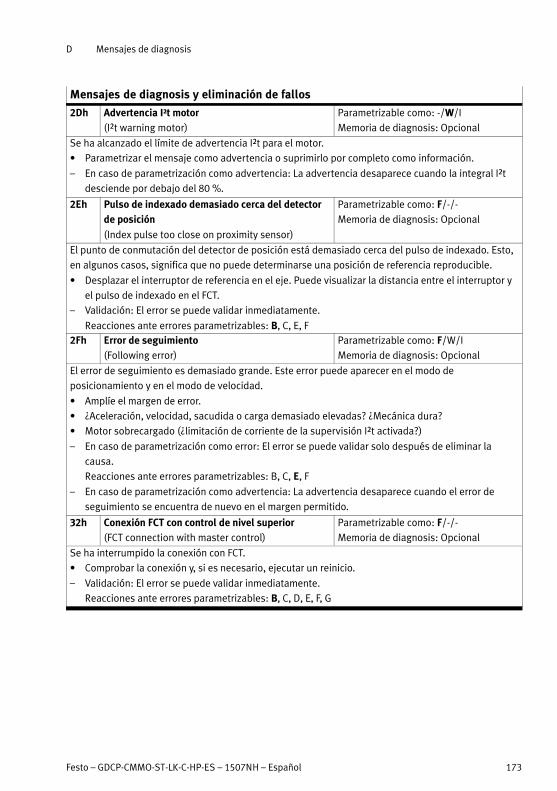
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 173
Mensajes de diagnosis y eliminación de fallos
2Dh Advertencia I²t motor(I²t warning motor)
Parametrizable como: -/W/I
Memoria de diagnosis: Opcional
Se ha alcanzado el límite de advertencia I²t para el motor.
� Parametrizar el mensaje como advertencia o suprimirlo por completo como información.
– En caso de parametrización como advertencia: La advertencia desaparece cuando la integral I²t
desciende por debajo del 80 %.
2Eh Pulso de indexado demasiado cerca del detectorde posición
(Index pulse too close on proximity sensor)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
El punto de conmutación del detector de posición está demasiado cerca del pulso de indexado. Esto,
en algunos casos, significa que no puede determinarse una posición de referencia reproducible.
� Desplazar el interruptor de referencia en el eje. Puede visualizar la distancia entre el interruptor y
el pulso de indexado en el FCT.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, E, F2Fh Error de seguimiento
(Following error)
Parametrizable como: F/W/I
Memoria de diagnosis: Opcional
El error de seguimiento es demasiado grande. Este error puede aparecer en el modo de
posicionamiento y en el modo de velocidad.
� Amplíe el margen de error.
� ¿Aceleración, velocidad, sacudida o carga demasiado elevadas? ¿Mecánica dura?
� Motor sobrecargado (¿limitación de corriente de la supervisión I²t activada?)
– En caso de parametrización como error: El error se puede validar solo después de eliminar la
causa.
Reacciones ante errores parametrizables: B, C, E, F
– En caso de parametrización como advertencia: La advertencia desaparece cuando el error de
seguimiento se encuentra de nuevo en el margen permitido.
32h Conexión FCT con control de nivel superior(FCT connection with master control)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Se ha interrumpido la conexión con FCT.
� Comprobar la conexión y, si es necesario, ejecutar un reinicio.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, D, E, F, G
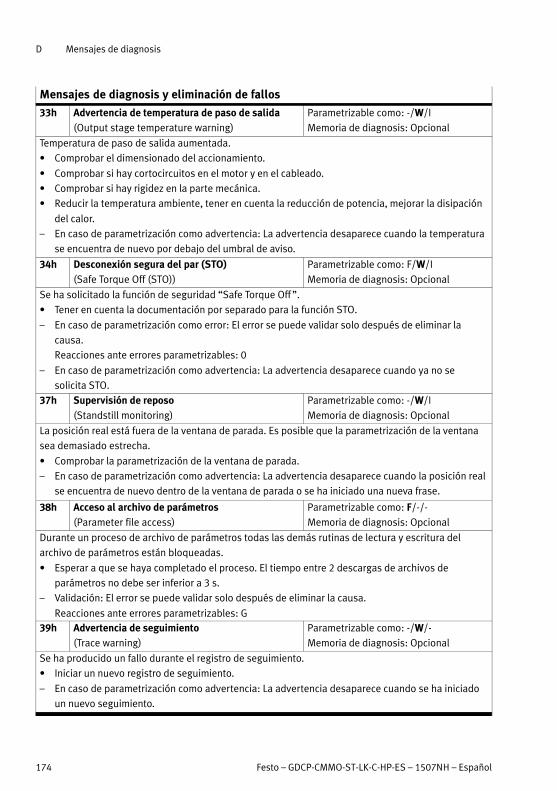
D Mensajes de diagnosis
174 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Mensajes de diagnosis y eliminación de fallos
33h Advertencia de temperatura de paso de salida(Output stage temperature warning)
Parametrizable como: -/W/I
Memoria de diagnosis: Opcional
Temperatura de paso de salida aumentada.
� Comprobar el dimensionado del accionamiento.
� Comprobar si hay cortocircuitos en el motor y en el cableado.
� Comprobar si hay rigidez en la parte mecánica.
� Reducir la temperatura ambiente, tener en cuenta la reducción de potencia, mejorar la disipación
del calor.
– En caso de parametrización como advertencia: La advertencia desaparece cuando la temperatura
se encuentra de nuevo por debajo del umbral de aviso.
34h Desconexión segura del par (STO)(Safe Torque Off (STO))
Parametrizable como: F/W/I
Memoria de diagnosis: Opcional
Se ha solicitado la función de seguridad “Safe Torque Off ”.
� Tener en cuenta la documentación por separado para la función STO.
– En caso de parametrización como error: El error se puede validar solo después de eliminar la
causa.
Reacciones ante errores parametrizables: 0
– En caso de parametrización como advertencia: La advertencia desaparece cuando ya no se
solicita STO.
37h Supervisión de reposo(Standstill monitoring)
Parametrizable como: -/W/I
Memoria de diagnosis: Opcional
La posición real está fuera de la ventana de parada. Es posible que la parametrización de la ventana
sea demasiado estrecha.
� Comprobar la parametrización de la ventana de parada.
– En caso de parametrización como advertencia: La advertencia desaparece cuando la posición real
se encuentra de nuevo dentro de la ventana de parada o se ha iniciado una nueva frase.
38h Acceso al archivo de parámetros (Parameter file access)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Durante un proceso de archivo de parámetros todas las demás rutinas de lectura y escritura del
archivo de parámetros están bloqueadas.
� Esperar a que se haya completado el proceso. El tiempo entre 2 descargas de archivos de
parámetros no debe ser inferior a 3 s.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: G39h Advertencia de seguimiento
(Trace warning)
Parametrizable como: -/W/-
Memoria de diagnosis: Opcional
Se ha producido un fallo durante el registro de seguimiento.
� Iniciar un nuevo registro de seguimiento.
– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha iniciado
un nuevo seguimiento.
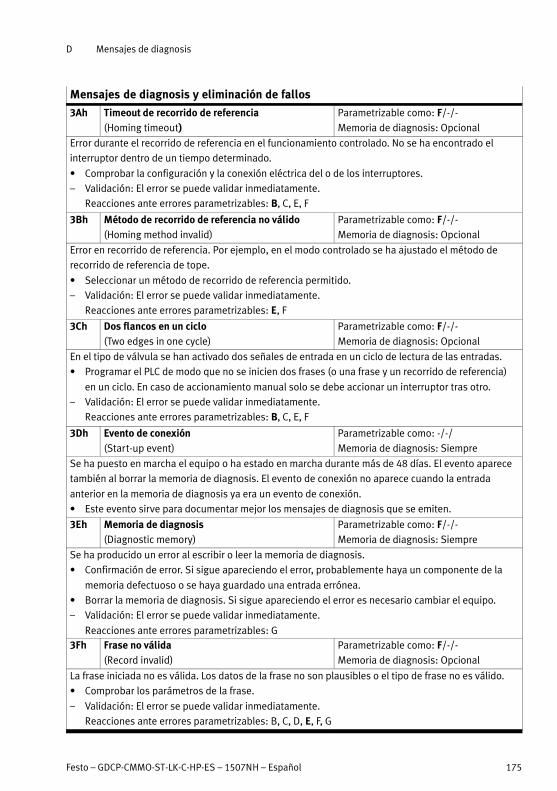
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 175
Mensajes de diagnosis y eliminación de fallos
3Ah Timeout de recorrido de referencia(Homing timeout)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Error durante el recorrido de referencia en el funcionamiento controlado. No se ha encontrado el
interruptor dentro de un tiempo determinado.
� Comprobar la configuración y la conexión eléctrica del o de los interruptores.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, E, F
3Bh Método de recorrido de referencia no válido(Homing method invalid)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Error en recorrido de referencia. Por ejemplo, en el modo controlado se ha ajustado el método de
recorrido de referencia de tope.
� Seleccionar un método de recorrido de referencia permitido.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: E, F
3Ch Dos flancos en un ciclo(Two edges in one cycle)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
En el tipo de válvula se han activado dos señales de entrada en un ciclo de lectura de las entradas.
� Programar el PLC de modo que no se inicien dos frases (o una frase y un recorrido de referencia)
en un ciclo. En caso de accionamiento manual solo se debe accionar un interruptor tras otro.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, E, F
3Dh Evento de conexión(Start-up event)
Parametrizable como: -/-/
Memoria de diagnosis: Siempre
Se ha puesto en marcha el equipo o ha estado en marcha durante más de 48 días. El evento aparece
también al borrar la memoria de diagnosis. El evento de conexión no aparece cuando la entrada
anterior en la memoria de diagnosis ya era un evento de conexión.
� Este evento sirve para documentar mejor los mensajes de diagnosis que se emiten.
3Eh Memoria de diagnosis(Diagnostic memory)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Se ha producido un error al escribir o leer la memoria de diagnosis.
� Confirmación de error. Si sigue apareciendo el error, probablemente haya un componente de la
memoria defectuoso o se haya guardado una entrada errónea.
� Borrar la memoria de diagnosis. Si sigue apareciendo el error es necesario cambiar el equipo.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: G3Fh Frase no válida
(Record invalid)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
La frase iniciada no es válida. Los datos de la frase no son plausibles o el tipo de frase no es válido.
� Comprobar los parámetros de la frase.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, D, E, F, G
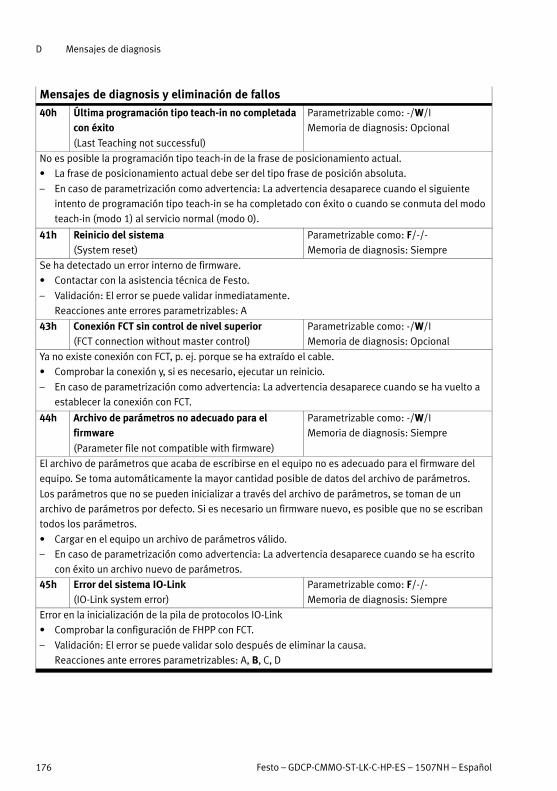
D Mensajes de diagnosis
176 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Mensajes de diagnosis y eliminación de fallos
40h Última programación tipo teach-in no completadacon éxito
(Last Teaching not successful)
Parametrizable como: -/W/I
Memoria de diagnosis: Opcional
No es posible la programación tipo teach-in de la frase de posicionamiento actual.
� La frase de posicionamiento actual debe ser del tipo frase de posición absoluta.
– En caso de parametrización como advertencia: La advertencia desaparece cuando el siguiente
intento de programación tipo teach-in se ha completado con éxito o cuando se conmuta del modo
teach-in (modo 1) al servicio normal (modo 0).
41h Reinicio del sistema(System reset)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Se ha detectado un error interno de firmware.
� Contactar con la asistencia técnica de Festo.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: A
43h Conexión FCT sin control de nivel superior(FCT connection without master control)
Parametrizable como: -/W/I
Memoria de diagnosis: Opcional
Ya no existe conexión con FCT, p. ej. porque se ha extraído el cable.
� Comprobar la conexión y, si es necesario, ejecutar un reinicio.
– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha vuelto a
establecer la conexión con FCT.
44h Archivo de parámetros no adecuado para elfirmware
(Parameter file not compatible with firmware)
Parametrizable como: -/W/I
Memoria de diagnosis: Siempre
El archivo de parámetros que acaba de escribirse en el equipo no es adecuado para el firmware del
equipo. Se toma automáticamente la mayor cantidad posible de datos del archivo de parámetros.
Los parámetros que no se pueden inicializar a través del archivo de parámetros, se toman de un
archivo de parámetros por defecto. Si es necesario un firmware nuevo, es posible que no se escriban
todos los parámetros.
� Cargar en el equipo un archivo de parámetros válido.
– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha escrito
con éxito un archivo nuevo de parámetros.
45h Error del sistema IO-Link(IO-Link system error)
Parametrizable como: F/-/-
Memoria de diagnosis: Siempre
Error en la inicialización de la pila de protocolos IO-Link
� Comprobar la configuración de FHPP con FCT.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: A, B, C, D
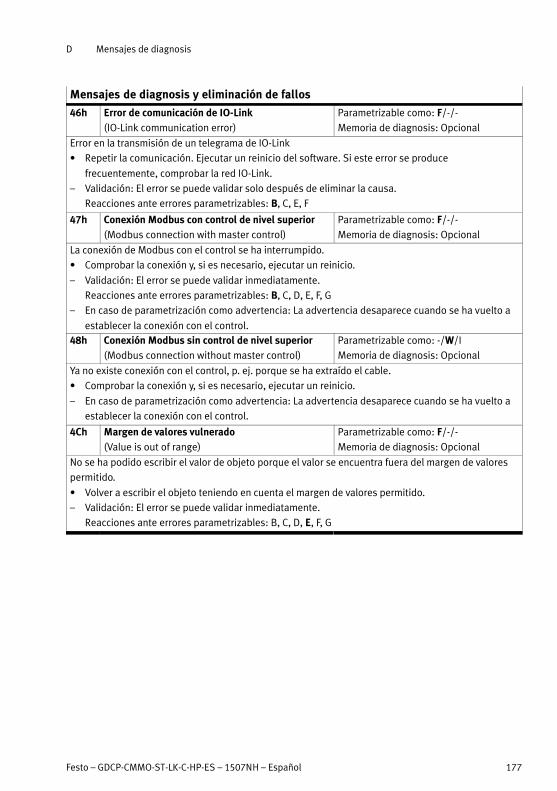
D Mensajes de diagnosis
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 177
Mensajes de diagnosis y eliminación de fallos
46h Error de comunicación de IO-Link(IO-Link communication error)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
Error en la transmisión de un telegrama de IO-Link
� Repetir la comunicación. Ejecutar un reinicio del software. Si este error se produce
frecuentemente, comprobar la red IO-Link.
– Validación: El error se puede validar solo después de eliminar la causa.
Reacciones ante errores parametrizables: B, C, E, F
47h Conexión Modbus con control de nivel superior(Modbus connection with master control)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
La conexión de Modbus con el control se ha interrumpido.
� Comprobar la conexión y, si es necesario, ejecutar un reinicio.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, D, E, F, G
– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha vuelto a
establecer la conexión con el control.48h Conexión Modbus sin control de nivel superior
(Modbus connection without master control)
Parametrizable como: -/W/I
Memoria de diagnosis: Opcional
Ya no existe conexión con el control, p. ej. porque se ha extraído el cable.
� Comprobar la conexión y, si es necesario, ejecutar un reinicio.
– En caso de parametrización como advertencia: La advertencia desaparece cuando se ha vuelto a
establecer la conexión con el control.
4Ch Margen de valores vulnerado(Value is out of range)
Parametrizable como: F/-/-
Memoria de diagnosis: Opcional
No se ha podido escribir el valor de objeto porque el valor se encuentra fuera del margen de valores
permitido.
� Volver a escribir el objeto teniendo en cuenta el margen de valores permitido.
– Validación: El error se puede validar inmediatamente.
Reacciones ante errores parametrizables: B, C, D, E, F, G
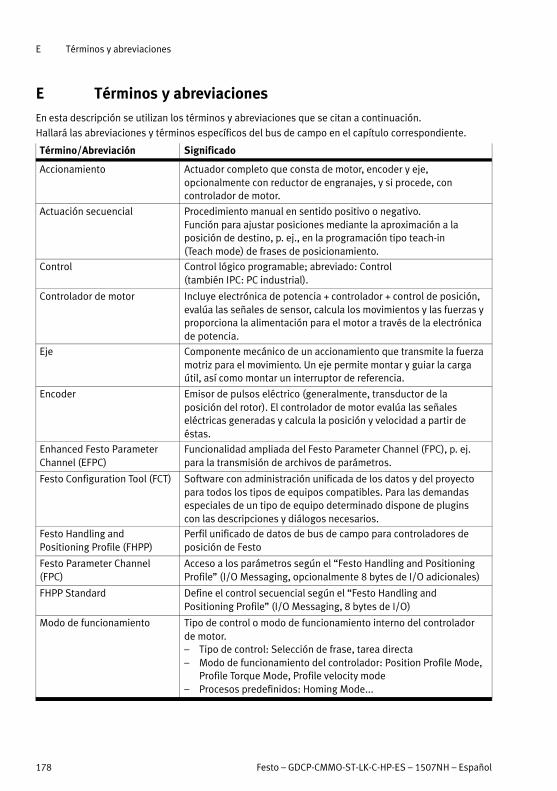
E Términos y abreviaciones
178 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
E Términos y abreviacionesEn esta descripción se utilizan los términos y abreviaciones que se citan a continuación.
Hallará las abreviaciones y términos específicos del bus de campo en el capítulo correspondiente.
Término/Abreviación Significado
Accionamiento Actuador completo que consta de motor, encoder y eje,opcionalmente con reductor de engranajes, y si procede, concontrolador de motor.
Actuación secuencial Procedimiento manual en sentido positivo o negativo.Función para ajustar posiciones mediante la aproximación a laposición de destino, p. ej., en la programación tipo teach-in(Teach mode) de frases de posicionamiento.
Control Control lógico programable; abreviado: Control (también IPC: PC industrial).
Controlador de motor Incluye electrónica de potencia + controlador + control de posición,evalúa las señales de sensor, calcula los movimientos y las fuerzas yproporciona la alimentación para el motor a través de la electrónicade potencia.
Eje Componente mecánico de un accionamiento que transmite la fuerzamotriz para el movimiento. Un eje permite montar y guiar la cargaútil, así como montar un interruptor de referencia.
Encoder Emisor de pulsos eléctrico (generalmente, transductor de laposición del rotor). El controlador de motor evalúa las señaleseléctricas generadas y calcula la posición y velocidad a partir deéstas.
Enhanced Festo ParameterChannel (EFPC)
Funcionalidad ampliada del Festo Parameter Channel (FPC), p. ej.para la transmisión de archivos de parámetros.
Festo Configuration Tool (FCT) Software con administración unificada de los datos y del proyectopara todos los tipos de equipos compatibles. Para las demandasespeciales de un tipo de equipo determinado dispone de pluginscon las descripciones y diálogos necesarios.
Festo Handling andPositioning Profile (FHPP)
Perfil unificado de datos de bus de campo para controladores deposición de Festo
Festo Parameter Channel(FPC)
Acceso a los parámetros según el “Festo Handling and PositioningProfile” (I/O Messaging, opcionalmente 8 bytes de I/O adicionales)
FHPP Standard Define el control secuencial según el “Festo Handling andPositioning Profile” (I/O Messaging, 8 bytes de I/O)
Modo de funcionamiento Tipo de control o modo de funcionamiento interno del controladorde motor.– Tipo de control: Selección de frase, tarea directa– Modo de funcionamiento del controlador: Position Profile Mode,
Profile Torque Mode, Profile velocity mode– Procesos predefinidos: Homing Mode...
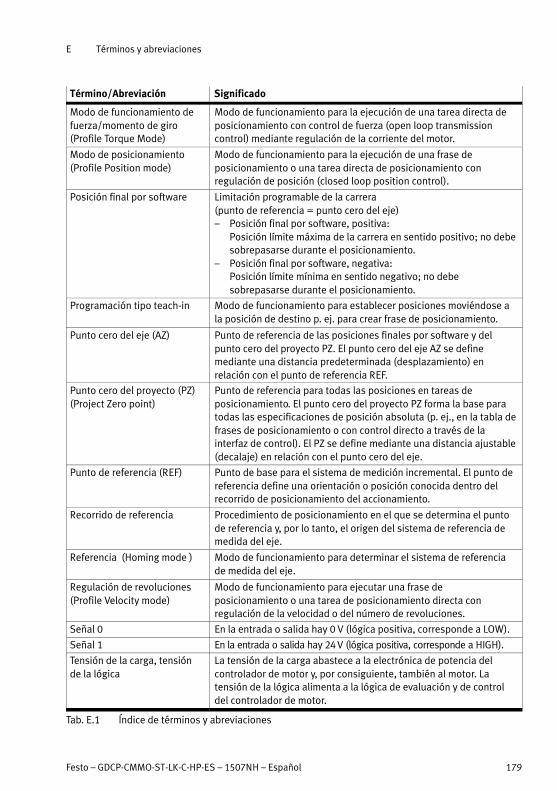
E Términos y abreviaciones
Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español 179
Término/Abreviación Significado
Modo de funcionamiento defuerza/momento de giro(Profile Torque Mode)
Modo de funcionamiento para la ejecución de una tarea directa deposicionamiento con control de fuerza (open loop transmissioncontrol) mediante regulación de la corriente del motor.
Modo de posicionamiento (Profile Position mode)
Modo de funcionamiento para la ejecución de una frase deposicionamiento o una tarea directa de posicionamiento conregulación de posición (closed loop position control).
Posición final por software Limitación programable de la carrera (punto de referencia = punto cero del eje)– Posición final por software, positiva:
Posición límite máxima de la carrera en sentido positivo; no debesobrepasarse durante el posicionamiento.
– Posición final por software, negativa: Posición límite mínima en sentido negativo; no debesobrepasarse durante el posicionamiento.
Programación tipo teach-in Modo de funcionamiento para establecer posiciones moviéndose ala posición de destino p. ej. para crear frase de posicionamiento.
Punto cero del eje (AZ) Punto de referencia de las posiciones finales por software y delpunto cero del proyecto PZ. El punto cero del eje AZ se definemediante una distancia predeterminada (desplazamiento) enrelación con el punto de referencia REF.
Punto cero del proyecto (PZ)(Project Zero point)
Punto de referencia para todas las posiciones en tareas deposicionamiento. El punto cero del proyecto PZ forma la base paratodas las especificaciones de posición absoluta (p. ej., en la tabla defrases de posicionamiento o con control directo a través de lainterfaz de control). El PZ se define mediante una distancia ajustable(decalaje) en relación con el punto cero del eje.
Punto de referencia (REF) Punto de base para el sistema de medición incremental. El punto dereferencia define una orientación o posición conocida dentro delrecorrido de posicionamiento del accionamiento.
Recorrido de referencia Procedimiento de posicionamiento en el que se determina el puntode referencia y, por lo tanto, el origen del sistema de referencia demedida del eje.
Referencia (Homing mode ) Modo de funcionamiento para determinar el sistema de referenciade medida del eje.
Regulación de revoluciones(Profile Velocity mode)
Modo de funcionamiento para ejecutar una frase deposicionamiento o una tarea de posicionamiento directa conregulación de la velocidad o del número de revoluciones.
Señal 0 En la entrada o salida hay 0 V (lógica positiva, corresponde a LOW).
Señal 1 En la entrada o salida hay 24 V (lógica positiva, corresponde a HIGH).
Tensión de la carga, tensiónde la lógica
La tensión de la carga abastece a la electrónica de potencia delcontrolador de motor y, por consiguiente, también al motor. Latensión de la lógica alimenta a la lógica de evaluación y de controldel controlador de motor.
Tab. E.1 Índice de términos y abreviaciones
CMMO-ST-C5-1-LKP
180 Festo – GDCP-CMMO-ST-LK-C-HP-ES – 1507NH – Español
Índice
AAccionamiento 178. . . . . . . . . . . . . . . . . . . . . . . .
Actuación secuencial 178. . . . . . . . . . . . . . . . . . .
Archivos IODD 13. . . . . . . . . . . . . . . . . . . . . . . . .
CControlador de motor 178. . . . . . . . . . . . . . . . . . .
EEINC 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Eje eléctrico 178. . . . . . . . . . . . . . . . . . . . . . . . . .
Encoder 178. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Enhanced Festo Parameter Channel
(EFPC) 150, 178. . . . . . . . . . . . . . . . . . . . . . . . .
FFesto Configuration Tool (FCT) 178. . . . . . . . . . . .
Festo Parameter Channel (FPC) 150, 178. . . . . . .
II-Port 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Incrementos de encoder 81. . . . . . . . . . . . . . . . .
Incrementos de interfaz 81. . . . . . . . . . . . . . . . . .
IO-Link 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
MMaster 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Memoria de diagnosis 78. . . . . . . . . . . . . . . . . . .
Mensaje
– Error de seguimiento 71. . . . . . . . . . . . . . . . . .
– Motion Complete 70. . . . . . . . . . . . . . . . . . . . .
– Supervisión de reposo 72. . . . . . . . . . . . . . . . .
Modo de funcionamiento 178. . . . . . . . . . . . . . . .
– Modo de posicionamiento 179. . . . . . . . . . . . .
– Profile Torque Mode
(véase Modo de fuerza) 179. . . . . . . . . . . . . . .
– Programación tipo teach-in 179. . . . . . . . . . . .
– Referenciado 179. . . . . . . . . . . . . . . . . . . . . . .
– Regulación de revoluciones 179. . . . . . . . . . . .
Modo de funcionamiento
(modo de funcionamiento FHPP)
– Selección de frase 29. . . . . . . . . . . . . . . . . . . .
– Tarea directa 29. . . . . . . . . . . . . . . . . . . . . . . . .
Modo de funcionamiento FHPP
– Selección de frase 29. . . . . . . . . . . . . . . . . . . .
– Tarea directa 29. . . . . . . . . . . . . . . . . . . . . . . . .
Modo de posicionamiento 179. . . . . . . . . . . . . . .
NNotas sobre la documentación 7. . . . . . . . . . . . .
PPLC 178. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Posición final por software 125, 179. . . . . . . . . .
– Negativa (inferior) 179. . . . . . . . . . . . . . . . . . . .
– Positiva (superior) 179. . . . . . . . . . . . . . . . . . .
Profile Position Mode 179. . . . . . . . . . . . . . . . . . .
Profile Torque Mode (véase Modo de fuerza) 179
Profile Velocity Mode 179. . . . . . . . . . . . . . . . . . .
Programación tipo teach-in 179. . . . . . . . . . . . . .
Punto cero del eje 140, 179. . . . . . . . . . . . . . . . .
Punto cero del proyecto 125, 179. . . . . . . . . . . . .
RReacciones ante errores 80. . . . . . . . . . . . . . . . .
Recorrido de referencia 179. . . . . . . . . . . . . . . . .
Referenciado 179. . . . . . . . . . . . . . . . . . . . . . . . .
– Punto de referencia 179. . . . . . . . . . . . . . . . . .
Regulación de revoluciones 179. . . . . . . . . . . . . .
SSelección de frase 29. . . . . . . . . . . . . . . . . . . . . .
SINC 81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Supervisión de reposo 72. . . . . . . . . . . . . . . . . . .
T
Tarea directa 29. . . . . . . . . . . . . . . . . . . . . . . . . . .
Transmisión de archivo de parámetros 154. . . . .

Sin nuestra expresa autorización, queda terminantemente prohibidala reproducción total o parcial de este documento, así como su usoindebido y/o exhibición o comunicación a terceros. De los infractoresse exigirá el correspondiente resarcimiento de daños y perjuicios.Quedan reservados todos los derechos inherentes, en especial los depatentes, de modelos registrados y estéticos.
Copyright:Festo AG & Co. KGPostfach73726 EsslingenAlemania
Phone:+49 711 347-0
Fax:+49 711 347-2144
e-mail:[email protected]
Internet:www.festo.com
Original: de





























![CMMO-ST-C5-1-LKP - Festo · – IO-Link – I-Port – Modbus TCP 8071685 2017-05b [8071691] CMMO-ST-C5-1-LKP](https://img.pdfslide.tips/doc/110x75/5f0b738b7e708231d4309550/cmmo-st-c5-1-lkp-festo-a-io-link-a-i-port-a-modbus-tcp-8071685-2017-05b.jpg)