Embed Size (px)
Citation preview

1
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Controlli Automatici A
Corsi di laurea triennali in Ingegneria Elettronica, Informatica, Telecomunicazioni
a.a. 2001/2002Docente: Prof. Aurelio Piazzi
Email: [email protected]://www.ce.unipr.it/people/piazzi/

2
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.1 Equazioni differenziali lineari2.2 Cenni di teoria delle funzioni impulsive2.3 Soluzione dell’equazione differenziale e
funzione di trasferimento2.4 Le relazioni fra le condizioni iniziali2.5 Le risposte canoniche2.6 I sistemi elementari del primo e secondo ordine2.7 I poli dominanti di un sistema dinamico

3
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.1 Equazioni differenziali lineari
• Sistemi scalari rappresentati da eq. differenziali lineari a coefficienti costanti
ubDubuDbyaDyayDayDa mm
nn
nn 0101
11 ++=++++ −− ……
∑ ∑= =
=n
i
m
i
ii
ii uDbyDa
0 0
È un modello matematico formale del sistema dinamico (orientato) Σ, y = variabile d’uscita, u = variabile d’ingresso.
n = ordine dell’eq. diff., per estensione ordine di Σ, n ≥ m;
ρ := n – m ordine relativo o grado relativo di Σ.

4
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• L’insieme dei Behaviours B B B B di Σ può essere quindi definito come:
B B B B := { (u(t),y(t)) : Σi=0n ai Di y = Σi=0
m bi Di u , u(t), y(t) funzioni reali definite su (-∞, +∞) }
• Proprietà: Il sistema Σ è lineare
Dim.: È immediata.
Siano (ui(t), yi(t)) ∈ B B B B , i = 1,2. Allora ∀ c1, c2 ∈ R segue:
( c1 u1(t) + c2 u2(t), c1 y1(t) + c2 y2(t) ) ∈ B B B B QED

5
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Il sistema Σ esprime un rapporto di causalità fra causa ed effetto. L’effetto, cioè l’uscita, viene usualmente determinata a partire dalla conoscenza dell’azione forzante:
{ segnale d’ingresso u(t) definito per t ≥ 0 }
e dalle condizioni iniziali espresse al tempo t = 0-
−−−−−−
−
−
)0(,),0(),0();0(,),0(),0(
1
1
yDDyyuDDuu
n
m
……
L’effetto determinato è il segnale d’uscita y(t) definito per t ≥ 0.
• L’istante t = 0 è in generale istante di discontinuità sia per l’ingresso che per l’uscità

6
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• L’uscita y(t)|[0,+∞) potrebbe anche essere determinata dalla conoscenza dell’azione forzante u(t)|[0,+∞) e dalle condizioni iniziali specificate al tempo t = 0+ :
++++++
−
−
)0(,),0(),0();0(,),0(),0(
1
1
yDDyyuDDuu
n
m
……
• def. Evoluzione libera (o “moto” libero)
È l’uscita di Σ, indicata con yL(t) t ≥ 0 , corrispondente all’ingresso identicamente nullo ( u(t) = 0 ∀ t ≥ 0 ) e alle condizioni iniziali assegnate.
• def. Evoluzione forzata (o “moto” forzato)
È l’uscita di Σ, indicata con yF(t) t ≥ 0 , corrispondente all’azione forzante (ingresso assegnato u(t)|[0,+∞) ) ed a condizioni iniziali tutte nulle.

7
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Proprietà (scomposizione dell’uscita):
L’uscita di Σ y(t), con t ≥ 0 , è data dalla somma dell’evoluzione forzata con l’evoluzione libera:
),()()( tytyty LF += ),0[ +∞∈t
• Proprietà (della coppia azione-forzante evoluzione-forzata)
Data l’azione forzante u(t)|[0,+∞) sia yF(t)|[0,+∞) la corrispondente evoluzione forzata. Allora assumendo l’estensione u(t) = 0 e y(t) = 0 ∀ t < 0 vale
(u(t), yF(t)) ∈ B B B B

8
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Esempio: determinazione dell’uscita in un circuito RLC
Sistema orientato da u ad y: eq. diff. corrispondente
)()()()(2 tutytRCDytyLCD =++
Ordine = 2
Ordine relativo = 2

9
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Problema: dato l’ingresso a gradino di figura u(t)
e le condizioni iniziali i(0-) = i0 e y(0-) = y0 determinare y(t) per t ≥ 0. [ si utilizzi il metodo della trasformata di Laplace]
• Discussione sulle condizioni iniziali:
Le c. i. associate all’eq. diff. sono y(0-), Dy(0-) (si noti che sono assenti le c. i. sulla u(t) perché m = 0 ):
Ci
CiDydi
Cty
t 0)0()0()(1)( =−=−⇒= ∫ ∞−ττ

10
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
si applichi la trasformata di L. all’eq. diff.:
[ ])(:)( tyLsY = [ ])(:)( tuLsU =
( ) ( ) )()()0()()0()0()(2 sUsYyssYRCDysysYsLC =++−++−+−
Sorge il problema: conosciamo le condizioni iniziali al tempo 0-quando sarebbero necessarie quelle al tempo 0+.
Soluzione: deduciamo le c. i. al tempo 0+ da quelle al tempo 0-.
Ragionamento fisico:a. Il segnale di corrente che attraversa una induttanza non può essere discontinuo …
CiDyDyii 0)0()0()0()0( =−=+⇒−=+

11
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
b. Il segnale di tensione ai capi di un condensatore non può essere discontinuo …
0)0()0( yyy =−=+
• Riprendendo l’eq. trasformata:
( ) ( ))0()0()0()()(12 RCyLCDysLCysUsYRCsLCs +++=++
11)()( 2
0002 ++
+++++
=RCsLCs
RCyLisLCyRCsLCssUsY
susU 0)( =

12
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
( ) 11)( 2
0002
0
+++++
++=
RCsLCsRCyLisLCy
RCsLCssusY
antirasformando si ottiene:
)()()( tytyty LF +=
( )
++++=
++
=
−
−
1)(
1)(
20001
201
RCsLCsRCyLisLCyLty
RCsLCssuLty
L
F
[ev. forzata + ev. libera]

13
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Problema: come risolvere il problema delle condizioni iniziali senza invocare principi esterni all’eq. diff. stessa? Oppure come risolvere direttamente l’eq. diff. a partire dalla conoscenza delle condizioni iniziali al tempo 0- ?
Una possibile soluzione a questi problemi consiste nell’attribuire significato all’eq. diff. al tempo t = 0. Questo richiede il concetto di derivata generalizzata … (relativo alla teoria delle distribuzioni o funzioni impulsive).

14
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.2 Cenni di teoria delle funzioni impulsive
• Def. Gradino unitario 1(t)
• Introduciamo f(t;τ) ∈ C0 :
≥<
=0100
:)(1tt
t
>
≤≤<
=
ττ
ττ
t
ttt
tf
1
0100
:);(
)(1);(lim 0 ttf =+→ ττ

15
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
≥
≤≤<
=
τ
ττ
τ
t
tt
tDf
0
0100
);(Il concetto usuale di limite non ammette l’esistenza di limτ→0+Df(t;τ) ciononostante:
);(lim:)( 0 τδ τ tDft +→=
(delta di Dirac)
δ(t) è una distribuzione, o più informalmente una funzione impulsiva
• Interpretazione di δ(t)
δ(t) è la derivata generalizzata del gradino unitario: δ(t) = D*1(t)
D* è l’operatore della derivata generalizzata: è un operatore lineare (come lo è D)

16
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Proprietà della delta di Dirac δ(t):
1. assumendo ta ≤ T ≤ tb :
∫ =−b
a
t
t
dtTt 1)(δ ∫ =−b
a
t
t
TfdtTttf )()()( δ
2. la trasformata di Laplace di δ(t) è 1 :
infatti
[ ] 1)( =tL δ
∫+∞
−− ==0
0 1)( sst edtetδ
• Introduciamo le derivate (generalizzate) di δ(t) :
D*i δ(t) ≡ derivata generalizzata di ordine i della delta di Dirac
δ(i)(t) := D*i δ(t)

17
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Costruzione di δ(1)(t) mediante limite di una funzione continua a tratti. Scegliamo f(t;τ) ∈ C1 :
>
≤≤−+−
≤≤<
=
τττ
ττ
τττ
21
21221
021
00
:);(2
2
22
t
ttt
ttt
tf
>
≤≤+−
≤≤<
=
τττ
ττ
τττ
20
221
0100
:);(2
2
t
tt
ttt
tDf
>
≤≤−
≤≤<
=
τττ
τ
τττ
20
21
0100
:);(2
22
t
t
tt
tfD
Osserviamo che:
);(lim)(1 0 ττ tft +→= );(lim)( 0 τδ τ tDft +→=

18
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Infine: );(lim:)()( 20
*)1( τδδ τ tfDtDt +→==
• Questo metodo costruttivo si può estendere per ottenere δ(i)(t) …

19
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Derivate generalizzate del gradino unitario 1(t):
( )( )
)()(1.........
)()()(1)(1)()()(1)(1
)()(1
)1(*
)2()1(*2**3*
)1(***2*
*
ttD
ttDtDDtDttDtDDtD
ttD
nn −=
======
=
δ
δδδδ
δ
• Derivate generalizzate della funzione gradino f(t) = k 1(t)

20
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
( ) ( )( ) ( )
( ) )()(1.........
)()(1)(1)()(1)(1
)1(*
)1(2*2*
**
tktkD
tktkDtkDtktkDtkD
nn −=
====
δ
δδ
• Derivate generalizzate di una funzione discontinua:
f(t) ∈ Cn(R – {0}) ed esistono f(0+) ( =: f+ ) e f(0-) ( =: f- ) ed anche Di f(0+) ( =: Di f+ ) e Di f(0-) ( =: Di f- )
Si introduce g(t) ∈ C0(R) definita come
( )
≥−−<
=−+ 0)(
0)(:)(
tfftfttf
tg
Equivalentemente: ( ) )(1)(:)( tfftftg −+ −−=

21
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Rappresentazione della funzione discontinua f(t) (relazione di ordine zero):
( ) )(1)()( tfftgtf −+ −+=
ovvero
f. discontinua = f. continua + f. a gradino

22
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Derivando in senso usuale Df(t) = Dg(t) ed in t = 0 possiamo attribuire, a Df(t) ovvero a Dg(t), un valore (finito) convenzionale, per esempio (Df+ + Df-)/2
Assunzione: La derivata generalizzata di una funzione continua sia la derivata usuale: )()(* tDgtgD =
• Applichiamo alla relazione di ordine zero l’operatore D*:
( )( ) )()()(
)(1)()()(*
***
tfftDgtfDtffDtgDtfD
δ−+
−+
−+=
−+=
( ) )()()(* tfftDftfD δ−+ −+=
f. derivata gen. di ordine 1 = f. discontinua + f. impulsiva (di ordine 0)

23
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
La funzione discontinua Df(t) può essere scomposta, come già visto, nella somma di una funzione continua ed una funzione a gradino …
( ) )()()(1)(:)( 011 RCtgtDfDftDftg ∈⇒−−= −+
segue: ( ) ( ) )()(1)()( 1* tfftDfDftgtfD δ−+−+ −+−+=
d. generalizzata di ordine 1 = f. continua + f. a gradino + f. impulsiva di ordine 0
Si voglia descrivere D*f(t) in un intorno infinitesimale di t = 0; questo significa valutare D*f(t) con t ∈ {0-, 0 , 0+}
( ) ( ) ( )( ) +−+−
−+−+−+−
−
=−+=+
−=−+−+=
=−
DfDfDfDffDffffDfDfDffD
DffD
)0(
)0()0()0(
)0(
*
*
*
δδ
In sintesi con t ∈ {0-, 0 , 0+} :
( ) ( ) )()(1)(* tfftDfDfDftfD δ−+−+− −+−+=

24
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Determinazione di D*2f(t):
Applicando la derivata generalizzata alla relazione che esprime D*f(t)
( ) ( ) )()()()( )1(1
2* tfftDfDftDgtfD δδ −+−+ −+−+=
Dalla definizione di g1(t) : Dg1(t) = D2f(t) ⇒
( ) ( ) )()()()( )1(22* tfftDfDftfDtfD δδ −+−+ −+−+=
( ) )()()(1)(:)( 02
2222 RCtgtfDfDtfDtg ∈⇒−−= −+
( ) ( ) ( ) )()()(1)()( )1(222
2* tfftDfDftfDfDtgtfD δδ −+−+−+ −+−+−+=
( ) ( ) ( ) )()()(1)( : }{0-,0,0con
)1(2222* tfftDfDftfDfDfDtfDt
δδ −+−+−+− −+−+−+=+∈
[ d. gen. di ord. 2 = f. cont. + f. a gradino + f. impul. di ord. 0 + f. impul. di ord. 1 ]

25
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Derivata generalizzata di ordine n di f(t):( ) ( ) )( )()()( )1(11* tfftfDfDtfDtfD nnnnn −
−+−−
+− −++−+= δδ
( ) )()( )(1)(:)( 0 RCtgtfDfDtfDtg nnnn
n ∈⇒−−= −+
( ) ( )( ) )(
)()(1)()()1(
11*
tfftfDfDtfDfDtgtfD
n
nnnnn
n
−−+
−−
+−
−+
−+
+−+−+=
δδ
[ d. gen. di ord. n = f. cont. + f. a gradino + f. impul. di ord. 0 + . . .
… + f. impul. di ord. n -1 ]
( ) ( )( ) )(
)()(1)(:}0,0,0{con
)1(
11*
tfftfDfDtfDfDfDtfD
t
n
nnnnnn
−−+
−−
+−
−+−
−+
+−+−+=+−∈
δδ

26
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Trasformata di Laplace della derivata generalizzata:[ ] [ ] [ ] [ ]
)()( )()()()()()()(*
−++
−+−+
−+−==−+=−+=
fffssFtLfftDfLtfftDfLtfDL δδ
[ ] )0()()( econclusionin * −−= fssFtfDL
[ ] ( )[ ] [ ] ( )[ ] )0()0()()(
)()()()(22*
***2*
−−−−=
−−=−== −−−
DfsfsFstfDLDffssFsDftfDsLtfDDLtfDL
Generalizzando (per induzione) i ∈ N
[ ] )0()()(1
0
1* −−= ∑−
=
−− fDssFstfDLi
j
jijii

27
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.3 Soluzione dell’equazione differenziale e funzione di trasferimentoIl modello matematico del sistema Σ
descritto dall’eq. diff.
∑ ∑= =
=n
i
m
i
ii
ii tuDbtyDa
0 0)()(
viene riscritto inserendo le derivate generalizzate:
∑ ∑= =
=n
i
m
i
ii
ii tuDbtyDa
0 0
** )()(
ed applichiamo la trasformata di Laplace …

28
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
[ ] [ ][ ] [ ]
[ ] [ ]
ji
j
jim
ii
m
i
ii
ji
j
jin
ii
n
i
ii
i
j
jijin
i
m
ii
i
j
jijii
n
i
m
i
ii
ii
n
i
m
i
ii
ii
suDbsUsbsyDasYsa
sUbuDssUsbsYayDssYsa
sUbtuDLbsYatyDLa
tuDLbtyDLa
tysYtuLsU
)( )(
)()()()(
)()()()(
)()(
)(:)( , )(:)(
1
0
1
10
1
0
1
10
0
1
0
1
1 10
1
0
1
01 1
*0
*
0 0
**
∑∑∑∑∑∑
∑∑ ∑∑
∑ ∑
∑ ∑
−
=−
−−
==
−
=−
−−
==
−
=−
−−
= =
−
=−
−−
= =
= =
−
=−
+
−=+
−
+=+
=
==
∑
∑∑∑∑
∑
∑
=
−
=−
−−
=
−
=−
−−
=
=
=
−+= n
i
ii
ji
j
jii
m
i
ji
j
jii
n
in
i
ii
m
i
ii
sa
suDbsyDasU
sa
sbsY
0
1
0
1
1
1
0
1
1
0
0
)()(

29
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Quindi:
[ ] [ ]
libera) evoluzionedell' (trasf.
)(
forzata) evoluzionedell' ta(trasforma )()(
)()()(
0
1
0
1
1
1
0
1
1
0
0
∑
∑∑∑∑
∑
∑
=
−
=−
−−
=
−
=−
−−
=
=
=
−=
=
+=
n
i
ii
ji
j
jii
m
i
ji
j
jii
n
iL
n
i
ii
m
i
ii
F
LF
sa
suDbsyDasY
sUsa
sbsY
tyLtyLsY

30
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Def. (Funzione di trasferimento di Σ)
Si definisce f.d.t. del sistema dinamico la funzione di variabile complessa
==
∑
∑
=
=
)()(: :)(
0
0
sasb
sa
sbsG n
i
ii
m
i
ii
per la quale è valida la relazione [ ] [ ])()()( tuLsGtyL F =
É un modello matematico alternativoall’eq. diff.; se le condizioni inizialisono tutte nulle (sistema in quieteall’istante t = 0- ):
)()()( sUsGsY =

31
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Def. : Un sistema Σ si dice (strettamente) proprio se la sua funzione di trasferimento è (strettamente) propria.Quindi:
Se n ≥ m (ρ ≥ 0) ↔ Σ proprio; se n > m (ρ ≥ 1) ↔ Σ strettamente proprio.
• Def. (guadagno statico di Σ)
É il rapporto fra il valore costante dell’uscita e il valore costante dell’ingresso ( ≠ 0 ) quando Σ è all’equilibrio:
K:= (ycostante)/(ucostante)
Dall’eq. diff. si deduce G(0)K quindi e :0
0 ==abK

32
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Def. (zeri di Σ)
Sono i valori complessi z ∈ C che annullano la f.d.t. : G(z)=0 .
• Def. (poli di Σ)
Sono le singolarità della funzione di trasferimento G(s).
Normalmente i poli sono le radici di a(s) = 0 ma …
}3,3,2{ } di poli {}4{ } di zeri {
)3)(2)(1(45)( 2
2
−−−=Σ−=Σ
+++++=sss
sssG

33
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Def. (modi del sistema dinamico Σ )
Sono le funzioni “tipiche” associate ai poli di Σ secondo la regola:
se p è un polo reale di molteplicità h :pthptpt ettee 1 , , , −
Se σ ± ω è una coppia di poli complessi coniugati di molteplicità h :)(sen, ),(sen ),(sen 1
2
1
hthtt tetttete ϕωϕωϕω σσσ +++ −
{ } { })2(sen ),2(sen ,,,, di modi]4)1)[(5()4(
)72)(1()(
1154244
223
2
ϕϕ ++=Σ++++
+++=
−−−−−− tteteeetteesssssssG
tttttt
Esempio:

34
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Proprietà (evoluzione libera e modi di Σ )
Sia Σ un sistema la cui f.d.t. non ammetta cancellazioni poli-zeri ( a(s) e b(s) sono coprimi fra loro). Allora l’evoluzione libera è una combinazione lineare dei suoi modi.
Dim.
[ ] c.i. dalle dipende 1-n grado di polinomio )( )()()( ≤≡= scsascsyL L
I modi di Σ sono associati alle radici di a(s) = 0 [perché a(s) e b(s) sono coprimi]. Quindi dallo sviluppo in fratti semplici segue la tesi … QED

35
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Non tutti i sistemi dinamici lineari e stazionari sono caratterizzati da f.d.t. razionali.Esempio: ritardo finito. Se u(t) è il segnale all’ingresso, il segnale all’uscita è y(t) = u(t-t0) dove t0 è il tempo di ritardo.
[ ] [ ] [ ] stst esGetuLttuLtyL 00 )( )()()( 0−− =⇒=−=
In generale, i sistemi dinamici lineari e stazionari retti da eq. diff. alle derivate parziali hanno f.d.t. trascendenti (non razionali).

36
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.4 Le relazioni fra le condizioni iniziali• Un problema generale associato all’eq. diff. di Σ è l’individuazione delle relazioni che legano le c.i. al tempo 0- alle c.i. al tempo 0+.
Specificatamente, il problema può essere posto come: Date le condizioni iniziali al tempo 0-
−−−−−−
−
−
)0(, ),0(),0()0(, ),0(),0(
1
1
yDDyyuDDuu
n
m
……
e le condizioni iniziali dell’azione forzante{ })0(, ),0(),0( 1 +++ − uDDuu m…
determinare le c.i. sull’uscita al tempo 0+
{ })0(, ),0(),0( 1 +++ − yDDyy m…

37
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
La soluzione a questo problema completa lo studio della discontinuità di u(t) e y(t) al tempo zero e permette la comprensione dei legami di continuità dei segnali fra causa ed effetto. Possibile soluzione (inopportuna): da Y(s) si calcola y(t) mediante antitrasformazione di L. e quindi
1,,1,0 ),(lim)0( 0 −==+ +→ nityDyD it
i …
Si desidera un approccio che eviti il calcolo completo di y(t)|[0,+∝)
• Si applichi la t. di Laplace all’eq. diff. con le derivate “normali”:
∑
∑∑∑∑
∑
∑
=
−
=+
−−
=
−
=+
−−
=
=
=
−+= n
i
ii
ji
j
jii
m
i
ji
j
jii
n
in
i
ii
m
i
ii
sa
suDbsyDasU
sa
sbsY
0
1
0
1
1
1
0
1
1
0
0
)()(

38
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Evidentemente le due espressioni di Y(s) dedotte debbono coincidere per ogni u(t) e per ogni insieme di c.i. Deve quindi valere l’identità:
ji
j
jii
m
i
ji
j
jii
n
i
ji
j
jii
m
i
ji
j
jii
n
isuDbsyDasuDbsyDa
1
0
1
1
1
0
1
1
1
0
1
1
1
0
1
1∑∑∑∑∑∑∑∑−
=+
−−
=
−
=+
−−
=
−
=−
−−
=
−
=−
−−
=
−=−
Da questa identità si possono ricavare le relazioni algebriche che legano le condizioni al tempo 0+ a quelle al tempo 0- (si ricorda che n ≥ m e ρ := n – m èl’ordine relativo (o grado relativo) di Σ.
• Proprietà (relazioni fra le condizioni iniziali)
−
−−
=
−
−−
===
−−
+−
−+
−+
−
−
−−
+−
−+
++
−+
−++
+
−
−−
+−
−+−+
uDuD
DuDuuu
bbbbbb
bbb
yDyD
yDyDyDyD
aaaaaa
aaa
yDyDDyDyyy
mmmm
m
mm
m
nnnn
n
nn
n
11121
2
1
11
11
121
2
1
11
0
00
0
00 , , , …
ρρ
ρρ
ρρ
ρ
ρρ

39
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Conseguentemente le c.i al tempo 0+ si possono determinare risolvendo il sistema:
−
−−
+
+
=
−−
+−
−+
−+
−
−
−−
−+
−
−++
+
−
+−
++
+
−++
+
−
uDuD
DuDuuu
bbbbbb
bbb
yD
yDyD
aaaaaa
aaa
yD
yDyD
aaaaaa
aaa
mmmm
m
mm
m
nnn
n
nn
n
nnn
n
nn
n
11121
2
1
1
1
121
2
1
1
1
121
2
1
0
00
0
00
0
00ρ
ρ
ρρ
ρ
ρ
ρ
ρρ
ρ
Da questa equazione matriciale si possono ricavare facili relazioni ricorsive …

40
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Considerato che l’istante t = 0 è un istante convenzionale per Σ e che u(t) è una funzione continua a tratti segue che y(t) ∈ Cρ-1.
Più in generale vale (con C-1 si denota l’insieme delle funzioni continue a tratti)
• Proprietà (continuità ingresso uscita)
Sia (u(t), y(t)) ∈ B e p ∈ Z con p ≥ −1. Allorapp CtyCtu +∈⇔∈ ρ)( )(
Dim. : (cenno) Per p = 0 occorre provare che ρCtyCtu ∈⇔∈ )( )( 0
Dalle relazioni fra c.i. abbiamo ( an≠ 0) ( ) ( )−+−+ −=− uubyDyDa mnρρ
QED ... ecc , viceversae segue da Quindi −+−+ == yDyDuu ρρ

41
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Esempio: studio delle condizioni iniziali per l’eq. diff. (associata al circuito RLC già introdotta)
uyRCDyyLCD =++2
eq.l' integrare"" senza e edeterminar vuoleSi).(1)( è forzante azionel' ,/ e sono -0 tempoal c.i. le 000
++
−− ===Dyy
tutuCiDyyy
Soluzione: u(t) è funzione continua a tratti quindi y(t) ∈Cρ-1 = C1 ( ρ = 2), quindi y(t) e Dy(t) sono entrambe continue: CiDyDyyyy / e 00 ==== −+−+
Ragionamento alternativo: si riscrive l’eq. diff. interpretata con le derivate generalizzate
( ) ( ) ( )( ) ( ) ( ) utyyaDyatyyatDyDyayDa
tyytDyDyyDyDtyyDyyD=−++−+−+
−+−+=−+=
−+−+−+
−+−+−+
)()()(
)()( e )(
11)1(
222
2
)1(22**
δδδδδδ
Quest’ultima eq. è valida per ogni t, in particolare per t = 0 …

42
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.5 Le risposte canoniche• Proprietà (della coppia azione-forzante evoluzione forzata)
Sia (u(t),y(t)) ∈ B con u(t) = 0 ed y(t) = 0 per t < 0. Segue
( )( ) B )(),( 3.
B )(),( 2.
B )(,)( .1
**
00
∈
∈
∈
∫∫
tyDtuDtyDtuD
dydutt
ττττ
Dim. : Evidentemente (u(t),y(t)) ∈ B se e solo se Y(s) = G(s) U(s) .
1. segue ))() )(1)()(1
00
=
⇔= ∫∫
tt
du(τLsGdy(LsUs
sGsYs
τττ
( ) ( ) [ ] [ ] 2. segue )()()( )()()( ** tuDLsGtyDLssUsGssY =⇔=

43
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Per provare la 3. si usa un altro approccio:
∑ ∑= =
=n
i
m
i
ii
ii tuDbtyDa
0 0)()(
applicando l’operatore derivata (normale):
QED 3. segue )()(00
tDuDbtDyDam
i
ii
n
i
ii
=
∑∑==
• Segnali tipici per l’ingresso di Σ:
δ(t) impulso unitario (delta di Dirac) L[δ(t)] = 1
1(t) gradino unitario L[1(t)] = 1/s
t 1(t) rampa unitaria L[t 1(t)] = 1/s2
(1/2) t2 1(t) parabola unitaria L[(1/2) t2 1(t) ] = 1/s3

44
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Def. Risposta canonica
É l’evoluzione forzata di Σ in risposta ad un segnale tipico all’ingresso
Le risposte canoniche usualmente adottate sono:
g(t) ≡ risposta all’impulso δ(t) o risposta impulsiva
gs(t) ≡ risposta al gradino 1(t) o risposta indiciale
si noti che g(t) = gs(t) = 0 per t < 0
[ ]
=
=
−
−
)(1)(
)()(
1
1
sGs
Ltg
sGLtg
s

45
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Proprietà:
( ))()( propri testrettamen sistemi iper )()(
)()(
*0
tDgtgtgDtg
tgdg
s
s
s
t
==
=∫ ττ
Dim.
( ) ).()( segue )(, )(),(000
tgdgBdgδ(τ)dτBtgt s
ttt
=∈
⇒∈ ∫∫∫ ττττδ
( ) ( ) ).( segue )(),(1 )(),(1 *** tgDg(t)BtgDtDBtgt sss =∈⇒∈
QED ).()( quindi continua, funzione una è )( , 1 Se * tDgtgDtg sss =≥ρ

46
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Le risposte canoniche sono m.m alternativi all’eq. diff. o alla funzione di trasferimento. Infatti permettono la determinazione dell’ev. forzata nota l’azione forzante.
• Proprietà (integrali di Duhamel)
Nota la risposta all’impulso g(t) , l’evoluzione forzata y(t)|[0,+∝) in risposta all’azione forzante u(t)|[0,+∝) è determinabile mediante gli integrali di D.:
τττ
τττ
dtugty
dtguty
t
t
)()()(
)()()(
0
0
−=
−=
∫
∫

47
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Dim.: si può assumere u(t) = 0 per t < 0, si applica il teorema di convoluzione…
QED D. di int. gli seguono quindi e
)()()(
)()()(
)()()(
0
0
−=
−=
=
∫
∫∞+
∞+
τττ
τττ
dtugty
dtguty
sUsGsY
• Proprietà (integrali di Vaschy)Nota la risposta al gradino gs(t) , l’evoluzione forzata y(t)|[0,+∝) in risposta all’azione forzante u(t)|[0,+∝) è determinabile mediante gli integrali di V.:
)()0()()()(
)()0()()()(
0
0
tgudtugty
tgudtguty
s
t
s
ss
t
++−′=
++−′=
∫
∫
τττ
τττ

48
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Dim. : … ancora u(t) = 0 per t < 0.
[ ][ ] [ ]
( )
( )
QED
)()0()()(
)()()0()(
: neconvoluzio di teoremail applicando0)0( perchè )()0()()()(
)()(1
)( )(1)(
0
0
*
−++−′=
−++′=
=−++′==
=
=
∫
∫∞+
∞+
ττδττ
τττδτ
δ
dtutugy(t)
dtguuy(t)
ututuLtuDLssU
tgLsGs
ssUsGs
sY
s
s
s

49
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.6 I sistemi elementari del primo e secondo ordine• Sistemi del primo ordine (strettamente propri)
{ } { }
=Σ
−=Σ
∈≡+
=
− t1
di modi 1 di poli
R) ( tempodi costante
1) ad tonormalizza statico (guadagno 1
1)(
τ
τ
τττ
e
ssG

50
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
* determinazione di gs(t) (risposta al gradino unitario)
regime. di valoredel (99,3%) 95% il raggiungey uscital' )(5 3Per t
0 , 11 1
1)( /1
τττ
τ
=
≥−=
⋅+
= −− tess
Ltg ts

51
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
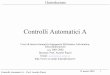
• Parametri della risposta al gradinoSpesso la risposta al gradino unitario di un sistema dinamico generico ha l’andamento di figura dove si evidenziano “parametri” caratteristici:

52
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
{ } T 05,0)( :RT min :T
toassestamen di tempoTazionesovraelong massima di istante T
salita di tempoTritardo di tempoT
regime) di valoredel %(in azionesovraelong massima
a
a
≥∀≤−∈=
≡≡≡≡≡
+ tyyty
S
regimeregime
m
s
r
• Sistemi del secondo ordine (senza zeri)caratterizzati dalla funzione di trasferimento G(s) così parametrizzata:
)1,0( o,smorzament di tecoefficien naturale, pulsazione
1)0( , 2
)( 22
2
∈≡∈≡
=++
=
+
δω
ωδωω
R
Gss
sG
n
nn
n

53
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
{ } { }{ } ( ){ } 1sen )( di modi
1 )( di poli
12
2
ϕδω
δωδωδω +−=
−±−=−
nt
nn
nesG
jsG
* Determinazione della risposta al gradino unitario
( )
−=−==
−=−=
+−=
++
= −−
δδδδϕ
δδωω
ϕωωδω
ω δω
22
2
2
22
21
1arctg1arcsen )arcos( :
11: 1:
sen1)2(
)(
A
tAesss
Lty
n
t
nn
n n

54
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
( )
tn
t
n
n
nn
nn teess
Lty
ttty
ωω ωω
ω
δ
ωπωδ
−−− −−=
−
=
+∞==
−=
+−=⇒=
1)(
)(
calcoli i rifacendo ma )! (A precedente eespressionl' utilizzare possonon 1per
cos12
sen1)( 0per
:limiteSituazioni
2
21

55
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
* Calcolo della massima sovraelongazione S
( ) ( )( ) ( )
( )
…
…
…
,2,1,0 1
,2,1,0 , 1tg
cos 1sen
0cos sen0)(
2
2
2
=−
=
==⇔−=+
+−=+
=+−+
=−−
nnt
nntt
tt
tAeteAtDy
n
ttn
nn
δωπ
πωδδϕω
ϕωδϕωδ
ϕωωϕωδω δωδω
( )
( ) 22
22maxmin,
1)1(sen 1arcsen che dato
sen 1
exp 1
11)(
δϕπδϕ
ϕπδπδ
δ
−−=+⇒−=
=+
−−
−−=
nn
nnty

56
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
{ } …,2,1,0 1
dove exp )1(1)(
1exp )1(1)(
2maxmin,
2maxmin,
=−
=−−−=
−−−−=
nnttty
nty
n
nn
n
δωπδω
δπδ

57
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
( )11001
exp 1
max
2max
−=
−−+=
yS
yδ
δπ
−−=
21exp 100
δδπS

58
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
* Calcolo del tempo di assestamento Ta
un limite superiore (upper bound) può essere determinato risolvendo l’eq. :
305,0ln 05,0 −≅=−=−an
T Te an δωδω
naT δω
3≅
* Tempo di salita Ts
nsT ω
8,1≈ É una relazione approssimata dedotta interpolando datinumerici

59
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Specifiche tipiche sulla risposta al gradinoUn sistema di controllo abbia fra l’ingresso di riferimento r (set-point) e l’uscita controllata y una f.d.t. G(s) del secondo ordine con la seguente struttura:
)1,0( ,0 , 2
)( 22
2
∈>++
= δωωδω
ωn
nn
n
sssG
Tipicamente si richiede che
a) S ≤ Slim
b) Ta ≤ Ta,lim
dove Slim (sovraelongazione massima) e Ta,lim (tempo di assestamento massimo) sono specifiche assegnate dal progettista sul sistema di controllo.

60
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
{ } { } { }
{ } { }
)(
3 ; )(
arcos , 1
exp 100 ;
:presentate relazioni dalle
limlim,limlim,
limlim2lim
limlimlimlimlim
nannaa TTT
SSS
δωδωδω
δϕδπδϕϕδδ
=≥⇔≤
=
−−=≤⇔≥⇔≤
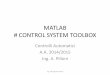
* Interpretazione geometrica delle condizioni S ≤ Slim e Ta ≤ Ta,lim : le specifiche sono soddisfatte se e solo se i poli complessi coniugati appartengono al settore evidenziato

61
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
2.7 I poli dominanti di un sistema dinamicoSistema Σ generico con f.d.t. G(s) = b(s)/a(s), n poli ed m zeri, con tutti i poli a parte reale (strettamente) negativa (tutti i modiconvergono a zero per t → +∞)
• Poli dominanti (prima definizione)
É la coppia di poli più vicina all’asse immaginario.Esempi:

62
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
Proprietà qualitativa: La risposta al gradino unitario dipende approssimativamente dai soli poli dominanti di Σ.… la dinamica “transiente” è “dominata” dall’influenza dei poli dominanti …
Conseguenza: se i poli dominanti sono complessi coniugati i parametri della risposta S, Ta e Ts sono determinabili approssimativamente dalle relazioni presentate in §2.6.
* Esempio di un caso critico (quasi cancellazione polo-zero)

63
2. Analisi dei Sistemi Dinamici Lineari
Controlli Automatici A – Prof. Aurelio Piazzi 5 aprile 2002
• Poli dominanti (seconda definizione)
É la coppia di poli, non soggetta a quasi cancellazione polo-zero, piùvicina all’asse immaginario.
* Precisazioni:
1. Il concetto di poli dominantiporta ad una approssimazionedel comportamento transienteche può essere anche moltorozza …
2. Non è sempre possibileindividuare una “vera” coppia di poli dominanti.