Embed Size (px)
DESCRIPTION
tesina del corso di controlli automatici del Politecnico di Torino - 1997
Citation preview

GianLuca DeMichelis Controlli Automatici
Pagina 1
Politecnico di Torino Anno accademico 96-97
Corso di Controlli Automatici generaleProf. Enrico Canuto
Asservimento digitale di posizione ad ungrado di libertà
DeMichelis GianLuca - gruppo 53

GianLuca DeMichelis Controlli Automatici
Pagina 2
Sommario
1. Obiettivi e Specifiche2. Scelta dei Componenti
Scelta del Riduttore Scelta del Motore Scelta dell’Alimentatore Scelta del Trasduttore di Posizione Convertitore D/A
3. Il Controllo Digitale Modello fine dell’impianto Il modello semplificato Architettura del sistema di controllo Programmatore Osservatore Compensatore
4. La Prova Migliore Scelta dei parametri Traiettoria del braccio Velocità del braccio Errori Andamento del comando Coppia sul riduttore Prova con forza utile Risultati
5. Analisi dei Costi Costi di produzione Ricavi attesi Costo di esercizio Utile

GianLuca DeMichelis Controlli Automatici
Pagina 3
1. Obiettivi e SpecificheLo scopo ultimo del progetto è quello di simulare tramite elaboratore un sistema per il
controllo automatico della posizione di un braccio meccanico ad un grado di libertà.
Il braccio meccanico, incernierato ad un estremo, è in grado di muoversi di solo moto
rotatorio intorno ad un punto fisso, ed ha lo scopo di portare un utensile in una data
posizione e di mantenervelo durante un ciclo di lavorazione.
Lo schema di principio del sistema da controllare è schematizzato nella seguente figura:
La funzione del contrappeso è quella di equilibrare il braccio, in modo che l’asse di
rotazione, in assenza di utensile, sia baricentrico.
Dati del sistema:
• J b : momento d’inerzia del sistema composto da braccio meccanico e contrappeso;
• Mu : massa dell’utensile;
• Fu : massima forza esercitata dall’utensile sul braccio meccanico durante la lavorazione;
• ω : velocità angolare massima raggiungibile dal braccio meccanico;
• α : accelerazione angolare massima raggiungibile dal braccio meccanico;
• ε : tolleranza relativa alla posizione del braccio meccanico in posizione;
• ε m : tolleranza relativa alla posizione del braccio meccanico in movimentazione;
•
: lunghezza del braccio;
• τs : tempo d’assestamento nominale.
Personalizzazione:
Y
X
x
Utensile M l
ϑ
Contrappeso

GianLuca DeMichelis Controlli Automatici
Pagina 4
1. Inerzia del braccio Jb = 6(G/75 + ( N -1)2 + (9 - S)0,5) dove:
• G = numero di gruppo = 53
• N = numero di componenti del gruppo = 1
• S = appello estratto = 6
2. Massa utile Mu < 0,2* Jb
3. Forza utile Fu < 10 N
Dunque le specifiche sulle quali basare il lavoro sono:
Dato Valore UnitàJb 13,24 kg m2
Mu 2,65 kgFu 10 Nω 1,5 rad / sα 1,5 rad / s2
ε 1 mradεm 30 mradl 1 mτs 0,5 s

GianLuca DeMichelis Controlli Automatici
Pagina 5
2. Scelta dei componenti
Scelta del Riduttore
La scelta del riduttor fatta sulla base delle specifiche di movimentazione: velocità
massima ed accelerazione massima del braccio.
Poiché ω pari a 1,5 rad/s e la velocità nominale di un generico motore elettrico a
corrente continua può essere presa pari a 300 rad/s, il rapporto di riduzione τ dovrebbe
assestarsi intorno a 200; se però considero i 300 rad/s come limite superiore per la
velocità del motore, posso scegliere un τ più piccolo, portando la massima velocità del
motore, corrispondente a 1,5 rad/s del braccio, intorno ai 250 rad/s.
Il componente scelto un modello Harmonic Drive taglia 50 con esecuzione BL3 a giochi
ridotti; riporto le specifiche :
Taglia riduttore T 50 BL3 unità
Inerzia primario 0,0015 kg m 2
Inerzia secondario 19,2 kg m 2
Rapporto di riduzione 160Rigidità torsionale 298800 N m / radGioco torsionale 0,87 mradCoppia al limite del gioco susecondario
16,95 N m
Coefficiente di attritoviscoso sul primario
0,00293 N m s
Coppia di attrito radente sulprimario
0,26 N m
Coppia nominale sulsecondario
476 N m
Velocità nominale sulprimario
298 rad /s
con questo componente i calcoli approssimati diventano: τ = 160,
ωmot = τ ω = 240 rad/s
Sarà in seguito necessario verificare che il motore scelto non presenti coppie comunque
superiori ai 476 N m .

GianLuca DeMichelis Controlli Automatici
Pagina 6
Scelta del Motore
Per quanto riguarda la scelta del motore, ho inserito in una tabella elettronica i dati di
alcuni modelli elettrici a corrente continua AXEM, calcolandone le caratteristiche e
confrontandole con le specifiche richieste al fine di effettuare una scelta opportuna. In
particolare, si rivelata determinante la corrente richiesta dal motore nelle peggiori
condizioni dinamiche:
IdCd
=⋅τ φ
che deve essere inferiore alla corrente nominale Im ; mentre sia la coppia statica sul
secondario del riduttore:
( )C Fu l M l g A Am rs = ⋅ + ⋅ ⋅ + + τ
sia la coppia dinamica:
( )[ ] ( )Cd J J J J Ml A A ( ) Mlgm r1 r 2 b2
m r= + + + + + + + + +τ α τ β β ω τ2m r m
si sono rivelate inferiori alla massima coppia sopportabile dal riduttore, per ognuno dei
motori provati.
Qui di seguito riporto le tabelle con i dati del costruttore e le coppie calcolate:
tipo di motore MD 17 HS MC 13 S MD 15 HS MD 17 CS MD 17 B unità
Coppia nominale Cm 3,18 1,27 1,9 2,7 1,2 N m
Velocità nominale ωm314 314 314 314 334,93 rad / s
Massimo carico Fm 450 300 450 450 600 N
Inerzia J m 0,000815 0,000235 0,000423 0,000815 0,00079 kg m 2
Flusso concatenato Φ 0,318 0,15875 0,230303 0,27 0,05 V s
Coefficiented'attrito viscoso
βm0,000364 0,000143 0,000258 0,000286 0,0001528 N m s
Coppia d'attritoradente
Am 0,06 0,026 0,06 0,06 0,12 N m
Resistenzad'armatura
Rm 1 1,5 1,25 1 0,175 Ω
Induttanzad'armatura
Lm 0,1 mH
Corrente nominale I m 10 8 8,25 10 24 A
Corrente massima abasse velocità
I 0 9,22 0,253 8 8,8 21 A
Tensione nominale Vm 116 65 88 100 24 V
Potenza nominale Pm 1000 400 600 850 400 W
Coppia statica 87,15 81,71 87,15 87,15 96,75 N m
Coppia dinamica 384,169 345,353 363,791 380,275 392,524 N m
Coppia di stallo 2,932 0,040 1,842 2,376 1,05 N m
Corrente richiesta 7,55 13,597 9,873 8,803 49,065 A
Rapporto di τ 160 160 160 160 160

GianLuca DeMichelis Controlli Automatici
Pagina 7
riduzione
Accelerazione massima 1,5 1,5 1,5 1,5 1,5 rad /s2
Massima coppia statica 0,545 0,511 0,545 0,545 0,605 N m
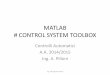
Per visualizzare chiaramente le differenze tra i motori, ho riportato l’istogramma delle
coppie dinamiche calcolate per i cinque motori presi in esame. Si osservi che il fondoscala
dell’asse vertical proprio 476, coppia nominale sopportabile del riduttore.
MD 17 HS MC 13 S MD 15 HS MD 17 CS MD 17 B
384
345364
380393
200
250
300
350
400
450
MD 17 HS MC 13 S MD 15 HS MD 17 CS MD 17 B
coppia dinamica sul secondario
Tutti i motori presi in considerazione soddisfano la richiesta di una coppia dinamica
massima inferiore a 476 N m.
MD 17 HS MC 13 S MD 15 HS MD 17 CS MD 17 B0
5
10
15
20
25
30
35
40
45
50
MD 17 HS MC 13 S MD 15 HS MD 17 CS MD 17 B
corrente nominale

GianLuca DeMichelis Controlli Automatici
Pagina 8
In questo grafico vengono evidenziate le richieste di corrente da parte dei vari motori
nelle peggiori condizioni dinamiche (barre rosse), e le correnti nominali (barre azzurre);
occorre che la corrente richiesta dal motore sia inferiore alla corrente nominale: in questo
caso solo due motori soddisfano le specifiche: il MD 17 HS ed il MD 17 CS.
Scelta
Sulla base dei dati in tabella, scelgo il motore MD 17 HS; controllo la correttezza della
scelta effettuata calcolando la massima coppia di stallo possibile al motore :
Cst = φ I0 = 2,93 Nm dove I0 la corrente massima a basse velocità ,e φ = Cm/Im il
flusso concatenato, ed osservo ch ampiamente maggiore della massima coppia statica
richiesta : Cs/τ = 0,5447 Nm.

GianLuca DeMichelis Controlli Automatici
Pagina 9
Scelta dell’Alimentatore
La scelta dell’alimentatore viene effettuata sulla base delle specifiche del motore e del
passo di campionamento imposto dal controllo; in particolare il ritardo complessivo di
regolazione τa deve essere minore del passo di campionamento T: occorre cio che la
banda passante dell’alimentatore sia superiore alla frequenza di campionamento.
Inoltre la tensione massima di uscita dell’alimentatore deve essere maggiore della
tensione nominale del motore, e la corrente nominale almeno pari a quella richiesta dal
motore: Va > Vm; Ia >= Im
Nella tabella seguente ho riportato i dati tecnici di quattro alimentatori, al fine di
effettuare una scelta opportuna:
nomedell'alimentatore
SAT 20k4/8/150
SAT 20k8/16/150
SAT 5k12/20/200
SAT 5k20/40/200 unità
Banda passante fa 2000 2000 500 500 Hz
Frequenza dicommutazione
fc 20000 20000 5000 5000 Hz
Corrente di picco Imax 8 16 20 40 A
Corrente nominale Ia 4 8 12 20 A
Induttanza zavorra La 2 2 6 4.05 mH
Tensione massima V 150 150 200 200 V
Potenza nominale Pa 600 1200 2400 4000 W
Come si può vedere la tensione massima di ognuno di questi alimentatori superiore alla
tensione nominale del motore, ch di 116 V.
Per quanto riguarda invece la corrente nominale continuativa erogabile dall’alimentatore,
si veda il grafico seguente:

GianLuca DeMichelis Controlli Automatici
Pagina 10
4
8
12
20
0
5
10
15
20
25
SAT 20k 4/8/150 SAT 20k 8/16/150 SAT 5k 12/20/200 SAT 5k 20/40/200
Am
per
e
Le barre viola rappresentano la massima richiesta di corrente del motore, mentre quelle
verdi la corrente erogabile dall’alimentatore. Si può chiaramente vedere che i modelli di
tipo SAT 20k non soddisfano la condizione Ia >= Im; la scelta cade quindi sull’alimentatore
SAT 5k 12/20/200.
Osservo che la banda passante di questo alimentator fa=500 Hz, ampiamente superiore
ai 200 Hz scelti per la frequenza di campionamento.
E’ inoltre necessario verificare che la caduta di tensione effettiva, somma dei contributi
induttivi, resistivi e controelettromotori, sia inferiore a quella nominale del motore:
V 2 L I f R Ifm m m> ⋅ ⋅ ⋅ + ⋅ +
⋅ ⋅φ α τ
dove L = Lm + La = 0,1 mH + 6 mH = 6,1 mH
e R = Rm + Ra = 1 Ω + 1 Ω = 2 Ω ; Ra detta resistenza di misura
Sostituendo i valori nell’equazione e calcolando il risultato si ottiene Vm > 44,78 ;
diseguaglianza ampiamente verificata essendo Vm = 116 V.

GianLuca DeMichelis Controlli Automatici
Pagina 11
Scelta del Trasduttore di Posizione
Il dispositivo in question un encoder ottico incrementale.
La scelta del trasduttor stata effettuata sulla base dei seguenti parametri:
• ρ: risoluzione del dispositivo, che rappresenta la minima rotazione (in radianti) del
braccio che lo strumento in grado di apprezzare;
• f t : frequenza massima di conteggio, ovvero il numero massimo di tacche che il
dispositivo in grado di contare in un secondo.
La risoluzione ideale dovrebbe essere di un ordine di grandezza inferiore alla precisione ε
dell’asservimento, quindi ρ ε< ⋅ =1
100 1, mrad, ma sono accettabili risoluzioni sino ad
almeno ρ <1
2ε = 0,5 mrad.
Trasduttori che soddisfano tale requisito sono costosi, pertanto sono preferibili encoder
ottici incrementali che moltiplichino in modo fittizio, grazie all’elettronica di cui sono
dotati, il numero di tacche e quindi la risoluzione.
In particolare utilizzando due rivelatori sfasati di 90° elettrici si aumenta la risoluzione di
un fattore quattro.
Nel dispositivo utilizzato la relazione che lega la risoluzione al numero di righ quindi
la seguente:
ρπ
=2
4 N t
Ne deriva che il trasduttore, nel caso di risoluzione ideale, deve essere dotato di un
numero di righe : N t >15708 , senza comunque poter scendere sotto le 3142 righe.
Il caso ideal ffettivamente troppo stringente. Adotto un numero di righe almeno
superiore al doppio del minimo: Nt > 6284, la risoluzione diventa allora ρ < 0,25 mrad.
Relativamente alla frequenza di conteggio dovrà invece sottostare al seguente vincolo:
f t > =ωρ
6000 Hz
La bontà del dispositivo funzione dei seguenti parametri:

GianLuca DeMichelis Controlli Automatici
Pagina 12
• imprecisione della graduazione (errore casuale);
• eccentricità della graduazione rispetto all’asse di rotazione (errore sistematico);
• deviazione radiale dei supporti che determinano una eccentricità variabile (errore
casuale);
• errori dell’elettronica.
L’errore di misura risulta dalla somma di tre contributi:
• rumore gaussiano bianco caratterizzato da una deviazione standard σ t ;
• errore sistematico dovuto all’eccentricità costante;
• rumore di quantizzazione.
Alla luce di queste considerazioni stato scelto il trasduttore Heidenhain RON 275, che ha
le seguenti caratteristiche:
parametro simbolo valore un itàNumero righe Nt 8192 x 4Risoluzione ρt 192 µradAccuracy 3st ± 8 "Dispersione del rumore st 12,9 µradEccentricità di montaggio e < 2 µmVelocità massimaimposta dalla meccanica
ωt 314 rad/s
Momento d’inerzia Jt 6 10-5 kg m2
Massa Mt 1 kgCoppia resistente Ct < 0,08 N mFrequenza di conteggio ft 4 x 25 kHz

GianLuca DeMichelis Controlli Automatici
Pagina 13
Convertitore D/A
Il convertitore D/A trasforma il comando discreto all’uscita del controllo nel
corrispondente comando analogico all’alimentatore.
La corrente nominale del motor di 10 A, quindi la massima dinamica ∆U del comando
risulta essere di 20 A.
La risoluzione del comando di corrente ρu deve essere tale che i suoi effetti sull’uscita
dell’impianto risultino trascurabili rispetto alla risoluzione ρ t del trasduttore di
posizione.
Modellizzando il sistema come un unico corpo rigido, immagino di applicare un impulso
di corrente di ampiezza ρu e durata pari al passo di campionamento T, determino il
conseguente spostamento angolare del braccio yu .
12s ( )y su
T
uρ J
⋅φ τ
( )y TT
Juu=
⋅ ⋅ ⋅⋅
φ τ ρ2
2
in cui l’inerzia totale sul secondario J viene calcolata in assenza di massa collegata al
braccio per considerare i massimi effetti del comando:
( )J J J J Jm r r b= + ⋅ + + =12
2τ 91,7 kg m⋅ 2
Imponendo la condizione ( )y Tu t≤ ⋅1
100ρ , si ottiene la risoluzione del comando in
corrente ρ u ≤ 0,277 A .
Utilizzando un convertitore da 8 bit ottengo: ρu
U= =
∆28 0,078 A .

GianLuca DeMichelis Controlli Automatici
Pagina 14
3.Il Controllo Digitale
Modello fine dell’impianto
Per simulare il funzionamento dell’impianto al calcolator necessario produrne un
modello matematico dettagliato, il modello fine.
Il sistema costituito dall’insieme di due masse rotanti, motore e braccio, ciascuna con il
proprio momento d’inerzia, connesse da un riduttore di velocità avente una rigidità
torsionale non lineare. Affinché il modello sia sufficientemente aderente alla realtà,
occorre tener conto degli attriti viscosi e di quelli radenti non lineari.
( )I t
( )V t
R L
φ
mω rω
ωτ
β1 β2
J1 J2
C Cg u+
Kr
A1
Le equazioni di stato utilizzate dal simulatore numerico dell’impianto si ricavano
imponendo gli equilibri delle tensioni nella maglia di armatura del motore elettrico e
delle coppie sugli alberi a monte e a valle del riduttore.

GianLuca DeMichelis Controlli Automatici
Pagina 15
( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )( )
( ) ( )
( ) ( )( ) ( ) ( )( ) ( )
( ) ( )
LdI t
dtR I t t V t
Jd t
dtI t A t t
C t
d t
dtt
Jd t
dtC t t C t C t
d t
dtt
m
mm m
r
mm
r g u
⋅ = − ⋅ − ⋅ +
⋅ = ⋅ − − ⋅ −
=
⋅ = − ⋅ − −
=
φ ω
ωφ ω β ω
τ
ϑω
ωβ ω ϑ
ϑω
1 1 1
2 2
∆ϑ
∆ϑ
Dove:
• J J Jm r1 1= + il momento d’inerzia totale del primario;
• J J J M lb r2 22= + + ⋅ il momento d’inerzia totale del secondario; β β β1 = +m r il
coefficiente di attrito viscoso complessivo sull’albero motore;
• β 2 il coefficiente di attrito viscoso sull’albero condotto;
• A1 la coppia di attrito radente sull’albero motore;
• C r la coppia resistente non lineare dovuta al riduttore;
• Cg la coppia di gravità;
• Cu la coppia esercitata dall’utensile durante la lavorazione;
• ( )∆ϑ t la deformazione angolare tra primario e secondario del riduttore;
• τ il rapporto di riduzione;
• φ il flusso concatenato con gli avvolgimenti del motore elettrico.
Poiché l’alimentatore a commutazione scelto capace di garantire una costante di tempo
di regolazione inferiore al passo di campionamento, può essere considerato con buona
approssimazione privo di ritardo tra corrente desiderata e corrente imposta dal motore. Si
assume dunque la corrente al motore come comando di tutto l’impianto e le variabili di
stato del modello fine si riducono a quattro: ϑ ω ϑ ωm m, , , .

GianLuca DeMichelis Controlli Automatici
Pagina 16
È possibile introdurre alcune semplificazioni trascurando l’attrito viscoso sul secondario
(β2 0= ), ipotizzando di muovere il braccio sul piano orizzontale ( Cg = 0 ) e di applicare
la forza utile solo in condizioni statiche ( Cu = 0 durante la movimentazione ).
Infine scrivendo le equazioni di stato adotto l’ipotesi di linearità, trascurando fenomeni
non lineari quali l’attrito radente (A1 0= ) e il gioco tra gli ingranaggi
( ( )C Kr r m= ⋅ −ϑ τ ϑ ) che comunque vengono tenuti in conto opportunamente dal
simulatore numerico dell’impianto come descritto in seguito.
Le equazioni di stato diventano:
d
dt
d
dt
d
dt
d
dt
k
J
k
J
k
J
k
J J J
Im
m
r r
r r
m
m
ϑ
ω
ϑ
ω
τ
τ τβ
ϑ
ω
ϑ
ωφ
=
−⋅
⋅−
⋅−
⋅
+
⋅
0 1 0 0
0 0
0 0 0 1
0
0
0
0
2 2
1 12
1
1 1
Attrito radente.
Le condizioni di attrito radente sono sempre molto incerte e fortemente dipendenti dallo
stato delle superfici di contatto. Tuttavia se ne possono individuare caratteristiche generali
quali quella di rimanere pressoché costante a velocità relativamente elevate e di
comportarsi in modo imprevedibile a basse velocità (inizio e fine della movimentazione).
Gli effetti dell’attrito radente sono particolarmente negativi nel momento in cui si deve
mantenere in posizione il braccio meccanico; infatti, poiché il corpo non potrà mai essere
mantenuto esattamente fermo ma oscillerà attorno alla posizione desiderata la coppia di
attrito radente avrà un comportamento imprevedibile ad ogni inversione di velocità.
Il simulatore dell’impianto trascura l’effetto di primo distacco e modellizza l’attrito
radente con una coppia viscosa alle basse velocità ed una coppia costante a velocità
elevate.

GianLuca DeMichelis Controlli Automatici
Pagina 17
Gioco del riduttore.
Al fine di garantire un funzionamento del riduttore senza pericoli di forzamento tra i
denti degli ingranaggi necessario consentire un leggero gioco tra essi. Ciò impedisce in
alcune condizioni la trasmissione della coppia dal primario al secondario. Il gioco tenuto
in conto nel modello fine introducendo una zona morta nella caratteristica elastica del
riduttore, descritta raccordando in modo dolce i due rami a pendenza costante
corrispondenti al comportamento “in presa” del riduttore. La caratteristica coppia-
deformazione del riduttore ha la seguente espressione matematica:
per ∆ϑ < −g
per − < <g g∆ϑ
per ∆ϑ > g
essendo g K Cr, , lg , rispettivamente il gioco, la costante di elasticità torsionale e la coppia
al limite del gioco del riduttore.
Le costanti c e γ si ricavano imponendo la continuità della funzione e della sua derivata
nei punti di raccordo, ottenendo :
γ
γ
=⋅
=
K g
C
cC
g
r
lg
lg
( )
( )( )
C K g C
C c
C K g C
r r
r
r r
= ⋅ + −
= ⋅ ⋅
= ⋅ − +
∆ϑ
∆ϑ ∆ϑ
∆ϑ
lg
lg
sgn γ

GianLuca DeMichelis Controlli Automatici
Pagina 18
Il modello semplificato
Le funzioni implementate nel sistema di controllo si basano in realtà su un modello
semplificato dell’impianto in cui sono descritte solo le relazioni causali ritenute essenziali
per il controllo in tempo reale dell’impianto.
Nella costruzione di tale modello il gruppo motore-riduttore-braccio viene considerato
come un unico corpo rigido rotante di cui si trascurano tutti i fenomeni non lineari, elastici
e di attrito. Si perviene così ad un modello a due variabili di stato: posizione angolare ϑ e
velocità di rotazione ω .
Nel dominio del tempo continuo le equazioni di stato del modello approssimato sono
quindi:
C
J
ϑ ω
( ) ( )( ) ( )
d t
dt
C
J JI t
d t
dtt
ω φ τ
ϑω
= = ⋅ ⋅
=
dove:
• C la coppia sul corpo rigido considerata a valle del riduttore;
• J J J= ⋅ +12
2τ il momento d’inerzia globale del corpo rigido.
Mediante opportune trasformazioni matematiche si perviene al modello a dati
campionati:

GianLuca DeMichelis Controlli Automatici
Pagina 19
( )
( )
( )
( )( )
ϑ
ω
ϑ
ω
i
i
T i
i
T
J
T
J
I i
+
+
=
⋅
+
⋅⋅⋅
⋅1
1
1
0 1
2
2 Φ
Φ
dove T il passo di campionamento e Φ = ⋅φ τ il flusso riportato a valle del riduttore.
Nell’ipotesi di trascurare il contributo diretto del comando sulla posizione, ed inoltre
introducendo la grandezza “velocità discreta” v T= ⋅ω , dimensionalmente omogenea alla
posizione angolare, si giunge alle equazioni di stato a tempo discreto:
( )
( )
( )
( )( )
ϑ ϑi
v i
i
v i b
I i
+
+
=
⋅
+
⋅1
1
1 1
0 1
0
essendo b T J= ⋅Φ 2 .
Per completare il modello semplificato necessario tener conto dei disturbi; essi sono
considerati additivi al comando e vengono modellizzati come la somma di un rumore
bianco w1 e di una deriva aleatoria z :
( ) ( )( ) ( )
d i z i w i
z i z i w i
= +
+ = +
1
21
( )
( )
dove w 2 anch’esso un rumore gaussiano bianco.

GianLuca DeMichelis Controlli Automatici
Pagina 20
Il modello semplificato così ottenuto il seguente:
b+
+
v(0)
v(i)
v(i)
Σ Σ
( )
( )a i
d i
( )0ϑ
( )iϑ( )I i

GianLuca DeMichelis Controlli Automatici
Pagina 21
Architettura del sistema di controllo
Il controllo digitale dell’impianto realizzato mediante un sistema ad anello chiuso che
consente di ottenere i seguenti vantaggi:
− controllabilità della stabilità del sistema;
− controllabilità della “prontezza” del sistema.
Compito del controllo automatico interpretare i riferimenti imposti dall’operatore e
soddisfarne nel minor tempo possibile le richieste, garantendo che tutte le specifiche di
movimentazione siano rispettate.
OPERATORE
PROGRAMMATORE COMPENSATORE R
OSSERVATORE
MISURATORE
IMPIANTO
I(i)
I(i+1) I(i)
Ymis
X(i+1)
I(i+1)
Y
( )d i +1
( )X i + 1
( )ϑ i
( )ϑ i

GianLuca DeMichelis Controlli Automatici
Pagina 22
Il sistema di controllo si compone dei seguenti blocchi fondamentali:
Programmatore
Sulla base dei riferimenti Y introdotti dall’operatore esegue una programmazione punto-
punto del comando I(i+1) da fornire all’impianto e degli stati X(i+1) che esso deve
assumere.
Misuratore
Fornisce in tempo reale la misura ( )y imis della posizione ( )ϑ i del braccio mediante un
trasduttore di posizione angolare.
Osservatore
A partire da ( )y imis e ( )I i effettua una previsione degli stati dell’impianto ( )X i + 1 e del
disturbo ( )d i + 1 relativi al passo di simulazione successivo.
Compensatore
Sulla base delle stime effettuate dall’osservatore corregge il comando programmato I(i+1)
e calcola l’effettivo comando ( )I i + 1 da inviare all’impianto al passo successivo.

GianLuca DeMichelis Controlli Automatici
Pagina 23
Programmatore
Si occupa della prima funzione di controllo realizzando, nell’ipotesi di assenza di disturbi
( )d i , la programmazione degli stati e del comando da fornire all’impianto per spostare nel
minor tempo possibile il braccio dalla posizione iniziale ϑ 0 a quella finale ϑ f rispettando
le specifiche di movimentazione. Esse comprendono:
− la risoluzione del programmatoreρ : rappresenta la minima discrepanza che il
programmator in grado di rilevare rispetto alla posizione finale;
− il fattore di smorzamento della decelerazione δ : se diverso da zero rende più graduale
la fase di frenata evitando pericolose sollecitazioni sul riduttore ed eccessivi picchi di
assorbimento di corrente da parte del motore;
− i vincoli sulla velocità e sull’accelerazione:
α = 1 5, rad s2
ω = 1 5, rad s
corrispondenti nel tempo discreto ( T=5ms ) a:
a T= ⋅ =α 2 37 5, µrad
v T= ⋅ =ω 7 5, mrad

GianLuca DeMichelis Controlli Automatici
Pagina 24
( )ϑ i
OPERATORE
CONTROLLOBANG-BANG
Σ Σ
1/b
a(i) v(i)
v(i)
I(i)
Y
Il programmatore calcola, durante il passo i-esimo, la posizione ( )ϑ i + 1 e la velocità
( )v i + 1 del braccio desiderate al passo successivo, nonch il comando ( )I i + 1 da dare
all’impianto; tutto ciò sfruttando le equazioni:
( ) ( ) ( )( ) ( ) ( )
( ) ( )
ϑ ϑi i v i
v i v i a i
I ia i
b
+ = +
+ = +
+ =+
1
1
11
dove ( )a i + 1 viene calcolata dal controllo Bang-Bang . Esso un controllo ad anello chiuso,
basato su un algoritmo di tipo punto-punto e che prevede l’uso di una variabile , la
quale può assumere tre valori a seconda delle diverse fasi di movimentazione:
• = 0 braccio fermo:
a
v
=
=
0
0

GianLuca DeMichelis Controlli Automatici
Pagina 25
• = 1 il braccio si muove con accelerazione pari a quella massima ammessa:
( ) ( )( )a i a x i+ = ⋅1 sgn ∆
oppure con velocità pari a quella massima ammessa ( condizione detta di “folle” ):
( )
( )
a i
v i v
+ =
+ =
1 0
1
• = 2 il braccio decelera per giungere in posizione con velocità nulla:
( ) ( ) ( ) ( )( )a i i X i+ = − ⋅ + ⋅1 1α δ sgn ∆
dove ( ) ( )∆X i if= −ϑ ϑ lo scarto di posizione al passo i-esimo
e ( ) ( )( ) ( )
α iv i
X i v i=
⋅ −
2
2 ∆ la decelerazione necessaria ad arrestare il braccio nella
posizione specificata.
Per minimizzare il tempo di movimentazione il programmatore durante la fase
= 1 induce l’impianto ad utilizzare i valori massimi ammessi per velocità e
accelerazione, ed inizia la fase = 2 in corrispondenza dell’ultimo istante utile a fermare
il braccio nella posizione prestabilita senza superarla.
Il verificarsi della condizione ( ) ( )ϑ ϑf i v i− + < +1 1 oppure ( )ϑ ϑ ρf i− + <1 , determina,
per il programmatore, la fine della movimentazione.
L’impianto entra quindi nella fase di assestamento al termine della quale il braccio inizia
ad oscillare intorno alla posizione richiesta.

GianLuca DeMichelis Controlli Automatici
Pagina 26
Osservatore
L’osservatore costituisce la parte più critica del controllo, dovendo assicurare il legame tra
modello semplificato e realtà fisica. Per colmare in parte la differenza tra i due vengono
tenuti in conto i disturbi che possono agire sull’impianto; ciò tuttavia non sufficiente
perch permangono gli errori di modello dovuti alle non linearità, alle vibrazioni ( legate
all’elasticità del riduttore ) e al fatto che in realtà una corretta modellizzazione del sistema
porterebbe ad equazioni a parametri distribuiti.
Nell’ambito delle funzioni di controllo l’osservatore riveste il ruolo di “trasduttore degli
stati”, ma anche di stimatore dei disturbi, al fine di una loro successiva compensazione, e
di filtro degli errori di modello.
L’utilizzo di un osservatore con retroazione statica proporzionale implicherebbe di dover
apportare la correzione sia sull’accelerazione che sulla velocità, in contrasto con l’ipotesi
di corpo rigido adottata. Dovendo dunque applicare una retroazione solo a monte dei due
integratori, e al fine di garantire la stabilità, la correzione viene applicata sia direttamente
tramite l’errore di stima della misura sia indirettamente tramite la sua derivata simulata
da un filtro passabasso opportunamente inserito nel circuito di retroazione.
L’osservatore ha come ingressi:
• il comando I fornito all’impianto fine;
• la misura ymis .
e come variabili di stato:
• la posizione stimata ϑ del braccio;
• la velocità stimata v del braccio;
• la deriva aleatoria z ;
• lo stato q relativo al derivatore.

GianLuca DeMichelis Controlli Automatici
Pagina 27
b
β
Σ
Σ
Σ Σ
MISURATORE
+
+
+
+
+
+
-
+
+
-
+
+
ymis
( )I i
( )z i
( )ϑ i
( )v i
( )q i
( )d i
( )w i1
( )w i2
( )a i
" 1
" 2
" 4
"3
Il blocco di retroazione, evidenziato nella figura precedente, riceve in ingresso l’errore di
stima della misura ymis −ϑ , differenza tra misura effettuata sull’impianto e stima della
posizione calcolata usando il modello approssimato, e produce la stima dei disturbi che
chiude l’anello.
Le equazioni di stato dell’osservatore sono le seguenti:

GianLuca DeMichelis Controlli Automatici
Pagina 28
( )
( )
( )
( )
( )
( )
( )
( )
ϑ
β
ϑi
v i
q i
z i
i
v i
q i
z i
y b I
y
y
mis
mis
mis
+
+
+
+
=−
− −
−
⋅
+⋅ + ⋅
⋅
1
1
1
1
1 1 0 0
1 1
1 0 1 0
0 1
0
2 1
3 4
2
3
Gli autovalori della matrice di stato dell’osservatore si ricavano imponendo:
( ) ( ) ( ) ( ) ( )det *λ γ γ γ γ γ γ γ γ⋅ − = + ⋅ + ⋅ + ⋅ + =I A 1 2 3 4 0
dove: γ λ
γ λ
= −
= −
1
1k k
k = 1 4, ,
si ricavano così le relazioni tra coefficienti e autovalori:
( ) ( )
( ) ( )[ ]
β γ γ γ γ
γ γ γ γ γ γ γ γ
γ γ γ γ γ γ γ γ β
γ γ γ γ β
= + + +
=
= ⋅ + + ⋅ + + ⋅
= ⋅ ⋅ + + ⋅ ⋅ + − ⋅
= ⋅ ⋅ ⋅ − ⋅
1 2 3 3
1
2 1 2 1 2 3 4 3 4
3 1 2 3 4 3 4 1 2 2
4 1 2 3 4 3
0
dove si speso il grado di libertà a disposizione annullando
1 .
Nel dimensionare i coefficienti
2 3 4, , e β , al fine di assegnare gli autovalori della
matrice di stato dell’osservatore, si rilevano esigenze contrastanti che scaturiscono dalla
complessità del ruolo che esso riveste nell’ambito delle funzioni di controllo. Per
aumentare la velocità di risposta alla variazione degli ingressi, bisognerebbe assegnare gli
autovalori il più vicino possibile all’origine; viceversa per filtrare gli errori di modello
sarebbero auspicabili autovalori prossimi all’unità.
Si rivela quindi indispensabile un’oculata scelta di compromesso, alla qualecontribuiscono
in modo determinante i risultati delle simulazioni al calcolatore.

GianLuca DeMichelis Controlli Automatici
Pagina 29
Compensatore
La compensazione dei disturbi agenti sull’impianto una funzione svolta dal controllo ad
anello chiuso: il compensatore determina il comando da fornire effettivamente al sistema
sulla base dell’osservazione del sistema stesso.
Il compensatore acquisisce:
− dal programmatore:
• i riferimenti degli stati desiderati al passo successivo ( )ϑ i + 1 e ( )v i + 1 ;
• il comando ( )I i + 1 programmato per il passo successivo.
− dall’osservatore:
• le predizioni degli stati ( )ϑ i +1 e ( )
v i +1 ;
• la stima dei disturbi ( )d i + 1 .
Sulla base di questi dati viene corretto il comando ( )I i + 1 sia con una compensazione
automatica che con una compensazione diretta.
Compensazione automatica
È un tipo di compensazione che, prescindendo dal tipo di disturbo che deve essere
compensato, si propone di minimizzare la differenza tra stati programmati e stati stimati:
al comando programmato viene aggiunto un termine correttivo proporzionale a questa
differenza.
Il comando da impartire all’impianto ha quindi la forma:
( ) ( ) ( )U i K e i U i+ = ⋅ + + +1 1 1
dove:
( ) ( ) ( )e i X i X i= −
in questo modo possibile controllare la dinamica dell’errore tra stati programmati e
stimati attraverso gli autovalori della matrice ( )A B K− ⋅ .

GianLuca DeMichelis Controlli Automatici
Pagina 30
Compensazione diretta
Si basa sulla possibilità di conoscere i disturbi agenti sull’impianto e consiste nel
correggere il comando aggiungendo direttamente la stima dei disturbi ( )d i + 1 effettuata
dall’osservatore.
Poich lo stimatore ottimo di un rumore gaussiano bianco, processo perfettamente
incorrelato, il suo valor medio cio zero, nel nostro caso la stima dei disturbi coincide
con quella della deriva aleatoria z .
In definitiva il comando da impartire all’impianto ha l’espressione:
( ) ( ) ( ) ( )[ ] ( )I i I i K X i X i
z i
b+ = + + ⋅ + − + −
+1 1 1 1
1
che essendo:
[ ]K k k= 1 2 X
v
=
ϑ
diventa:
( ) ( ) ( ) ( )[ ] ( ) ( )[ ] ( )I i I i k i i k v i v i
z i
b+ = + + ⋅ + − + + ⋅ + − + −
+1 1 1 1 1 1
11 2ϑ ϑ

GianLuca DeMichelis Controlli Automatici
Pagina 31
Qui sotto riporto lo schema del compensatore:
( ) ( )ϑ ϑi i+ − +1 1
( )z i
b
+ 1
( )I i + 1( )I i + 1 ( )I i
+ +
+-
++
k1k2
R
( ) ( )v i v i+ − +1 1
Il progetto del compensatore consiste nell’assegnazione dei guadagni k1 e k 2 che
determinano gli autovalori della matrice ( )A B K− ⋅ da cui dipende la dinamica dell’errore
( ) ( ) ( )e i X i X i= −
.
A B K
b k b k
− ⋅ =− ⋅ − ⋅
1 1
11 2
( )[ ] ( ) ( )det λ λ λ⋅ − − ⋅ = + ⋅ − ⋅ + ⋅ − + =I A B K b k b k k22 1 22 1 0
da cui si deduce il seguente risultato:
( ) ( )
( )
kb
kb
1 1 2
2 1 2
1 11
21
= − ⋅ − ⋅
= − − ⋅
λ λ
λ λ
La controllabilità della coppia ( )A B, permetterebbe di assegnare gli autovalori della
matrice ( )A B K− ⋅ tutti nell’origine, in modo da portare a zero in un numero finito di
passi l’errore ( ) ( ) ( )e i X i X i= −
. Tuttavia in questo modo i coefficienti k1 e k 2

GianLuca DeMichelis Controlli Automatici
Pagina 32
risulterebbero troppo elevati determinando brusche correzioni del comando, responsabili
di picchi di corrente al motore e di eccessivi valori di coppia sul riduttore. Sono dunque
preferibili autovalori più elevati, dell’ordine di 0,5 .

GianLuca DeMichelis Controlli Automatici
Pagina 33
4.La Prova Migliore
La simulazione al calcolatore del sistema di controllo viene effettuata nelle seguenti
condizioni:
• gli attriti viscosi sull’albero primario sono stati posti al loro valore minimo per essere
conservativi;
• l’accelerazione di gravità stata posta a zero per simulare una movimentazione nel
piano orizzontale;
• l’angolo di movimentazion assunto pari a π radianti .
Per valutare la bontà del controllo automatico necessario introdurre i seguenti indici di
prestazione :
Errore di asservimento in fase di movimentazione : indica la differenza tra la posizione
misurata del braccio e la posizione di riferimento stabilita dal programmatore, durante la
movimentazione ;
Errore di asservimento in posizione : l'andamento nel tempo della differenza tra la
posizione misurata del braccio e quella di riferimento, quando si in posizione ;
Tempo di assestamento : l'intervallo di tempo che intercorre tra l'istante in cui la
posizione programmata raggiunge la posizione finale e quello in cui l'errore di
asservimento si stabilizza definitivamente all' interno della fascia di tolleranza stabilita ;
Valore efficace dell'errore di asservimento : indica la variabilità dell'errore di
asservimento in posizione .

GianLuca DeMichelis Controlli Automatici
Pagina 34
Scelta dei parametri
La prova stata effettuata utilizzando nei vari paramtetri i seguenti valori:
• accelerazione massima del braccio α= 1,5 rad s2 ;
• velocità massima del braccio ω=1,5 rad s ;
• coefficiente di smorzamento della decelerazione δ = 0,5 ;
• autovalori dell osservatore : λ λ λλ
o o o
o1 2 3 0 96
4 0 95
= = ==
,
,
• autovalori del compensatore : λ λc c1 2= = 0,54
passo di campionamento T= 5 ms .
Traiettoria del braccio
Di seguito sono riportati i diagrammi di posizione angolare e di velocità del braccio.
Obiettivo del controllo far seguire all impianto il riferimento di posizione ,calcolato dal
programmatore, mantenendo le differenze di traiettoria entro una precisione ε m in fase di
movimentazione ed ε in fase di posizione, cio dopo l intervallo di assestamento τs .
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5Posizione del braccio
[sec]
[rad]
4 5 6 7 8 9
3.134
3.136
3.138
3.14
3.142
3.144
3.146
Zoom del la posizione del braccio
[sec]
[rad]
Come si può notare, il braccio non si stabilizza sulla posizione finale, bensì continua ad
oscillarvi attorno, a causa dell attrito radente e del gioco del riduttore.

GianLuca DeMichelis Controlli Automatici
Pagina 35
Velocità del braccio
Analizzo ora l andamento della velocità del braccio raffrontandola con quella
programmata in modo da evidenziarne le differenze :
0 2 4 6 8 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Velocità del braccio
[sec]
[rad/s]
0 2 4 6 8 100
0.5
1
1.5Velocità programmata
[sec]
[rad/s]
Dall analisi del grafico possibile individuare tre fasi del moto del braccio:
• la fase iniziale durante la quale la velocità cresce linearmente ;
• la fase intermedia durante la quale la velocità oscilla intorno al valore programmato ;
• la fase finale durante la quale il braccio frena gradualmente in accordo al coefficiente di
smorzamento δ ;

GianLuca DeMichelis Controlli Automatici
Pagina 36
Rispetto al riferimento si evidenziano le oscillazioni in fase di folle e di posizione, dovute
al gioco del riduttore.
0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4
1.35
1.4
1.45
1.5
1.55Zoom del la veloci tà in fase di fol le.
[sec]
[rad/s]
4 5 6 7 8 9-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Zoom del la veloci tà in fase di posizione
[sec]
[rad/s]

GianLuca DeMichelis Controlli Automatici
Pagina 37
Errori
La figura sottostante riporta l andamento della differenza tra la posizione programmata e
la posizione misurata , cio quello che viene chiamato errore di asservimento.
0 2 4 6 8 10
-0.01
-0.005
0
0.005
0.01
Errore di asservimento
[sec]
[rad]
Si osservi che :
• l errore di asservimento in fase di movimentazion sempre largamente minore del
valore limite imposto dalle specifiche in particolare si ottiene:
e movimentazionemax. = ( ) max ϑ i ymis movimentazione− = 9,25 mrad < 30 mrad ;
• l errore di asservimento in posizion minore del valore imposto dalle specifiche infatti
si ha :

GianLuca DeMichelis Controlli Automatici
Pagina 38
e posizionemax. = ( ) max ϑ i ymis posizione− = 0,59 mrad < 1 mrad ;
Si noti inoltre che durante la fase di decelerazione il picco dell errore di asservimento minore di quello presente in fase di accelerazione grazie all’utilizzo del fattore di
smorzamento δ ,introdotto per addolcire la frenata.
L’errore di stima della misura y mis −ϑ che costituisce l’ingresso del blocco di retroazione
dell’osservatore, ha un andamento praticamente coincidente, a meno del segno, con quello
l’errore di asservimento ϑ − y mis ;
0 2 4 6 8 10-0.015
-0.01
-0.005
0
0.005
0.01
0.015 Errore di stima della misura
infatti l’errore di asservimento stimato ϑ ϑ− molto piccolo, come si può notare dalla
figura seguente :

GianLuca DeMichelis Controlli Automatici
Pagina 39
0 2 4 6 8 10-6
-4
-2
0
2
4
6
8x 10
-4 Errore di asservimento stimato
[sec]
[rad]

GianLuca DeMichelis Controlli Automatici
Pagina 40
Andamento del comando
Le figure seguenti illustrano la differenza tra corrente programmata e quella realmente
fornita al motore.
Nelle fasi di accelerazione e folle la corrente fornita al motor maggiore di quella ideale
poich il modello semplificato, adottato dal programmatore, non tiene conto degli attriti.
In particolare in fase di accelerazione il comando aumenta pressoch linearmente per
vincere l’attrito viscoso proporzionale alla velocità; mentre in fase di folle oscilla intorno
al valore costante necessario a compensare gli attriti.
In decelerazione, invece, la corrent minore di quella programmata poich gli attriti
favoriscono la frenata.
0 2 4 6 8 10-10
-8
-6
-4
-2
0
2
4
6
8Corrente fornita al motore
[sec]
[A]
0 2 4 6 8 10-6
-5
-4
-3
-2
-1
0
1
2
3
4Corrente programmata
[sec]
[A]
Nell’andamento del comando di corrente sono chiaramente visibili due picchi che
separano le tre fasi della movimentazione: accelerazione, folle, frenata; anche in
corrispondenza di essi la corrente rimane comunque sempre al di sotto del valore
massimo sopportato dal motore.

GianLuca DeMichelis Controlli Automatici
Pagina 41
Coppia sul riduttore
In figura riportato il grafico delle sollecitazioni sul riduttore.
0 2 4 6 8 10-200
-150
-100
-50
0
50
100
150
200Coppia sul riduttore
[sec]
[Nm]
All’inizio e alla fine della fase di folle, in cui la coppia sul riduttore oscilla intorno allo
zero, si osservano i picchi di ampiezza maggiore causati dalle brusche variazioni della
velocità del motore.
Nella fase di posizione sono visibili picchi periodici e alternati in concomitanza delle
inversioni di velocità del braccio meccanico che oscilla all’interno della fascia di
tolleranza.
Si osservi che durante tutta la movimentazione del braccio la coppia sul riduttore rimane
abbondantemente al di sotto del valore limite fissato a Cnom=476 Nm.

GianLuca DeMichelis Controlli Automatici
Pagina 42
Prova con forza utile
Per simulare il comportamento dell impianto durante la lavorazione si introdotto un
comando di forza utile che si attiva a 5 secondi dall’inizio della movimentazione, cio quando già ultimata la fase di assestamento del braccio.
Ovviamente l attivazione della forza utile perturba l andamento della posizione del
braccio; ciò visibile nello zoom della posizione misurata durante la lavorazione.
.
4 5 6 7 8 9
3.14
3.141
3.142
3.143
3.144
3.145
3.146
Posizione misurata (con forza utile)
[sec]
[rad]
All inizio dell’attivazione dell utensile corrisponde una brusca variazione della posizione
del braccio, che esce dalla fascia d’errore imposta dalle specifiche; il controllo interviene e
riporta il braccio in posizione.
Si osserva la presenza di vibrazioni intorno alla posizione finale, differenti dalle
oscillazioni che caratterizzano la prova senza forza utile, visto ch cambiato il punto di
lavoro del riduttore ora sempre in presa.
Riporto infine gli andamenti dell errore di asservimento, comando di corrente e coppia sul
riduttore :

GianLuca DeMichelis Controlli Automatici
Pagina 43
0 2 4 6 8 10-0.015
-0.01
-0.005
0
0.005
0.01
0.015Errore di asservimento (con forza utile)
[sec]
[rad]
0 2 4 6 8 10-200
-150
-100
-50
0
50
100
150
200Coppia sul riduttore (con forza utile)
[sec]
[Nm]
0 2 4 6 8 10-10
-8
-6
-4
-2
0
2
4
6
8Corrente fornita al motore (con forza utile)
[sec]
[A]
Per contrastare l’improvviso spostamento del braccio causato dall’accensione dell’utensile
il controllo invia un picco di corrente evidente dal conseguente picco di coppia sul
riduttore.

GianLuca DeMichelis Controlli Automatici
Pagina 44
Risultati
Nella tabella seguente ho riportato i valori numerici degli indici di prestazione:
Indice Senza forzautile
Con forzautile
unità
Errore di asservimento inmovimentazione
9,25 9,25 mrad
Errore di asservimento in posizione 0,59 1,02 mradTempo di assestamento 0,425 0,425 secIntervallo di movimentazione 3,418 3,418 secValor medio dell'errore diasservimento in posizione
0,06 0,31 mrad
Valor efficace dell'errore diasservimento in posizione
0,289 0,561 mrad

GianLuca DeMichelis Controlli Automatici
Pagina 45
5.Analisi dei Costi
Costi di produzione
I costi di produzione si suddividono nei seguenti comparti:
• Braccio: cb = pb Jb = 0,1 * 13,24 = 1,324
dove Jb l’inerzia del braccio.
• Motore: cm = pm (Mm + αm Pm) = 1 ( 6,5 + 0,002 * 1000) = 8,5
Mm = massa del motore, Pm potenza in Watt.
• Riduttore: cr = pr Mr (1 + αi) = 2 * 4,6 ( 1 + 0,75) = 16,1
Mr = massa del riduttore; αi = 0.75 per il montaggio BL3.
• Trasduttore: ct = pt (Mt + αt Nt) = 1,5 ( 1 + 0,001 * 8192) = 13,788
Mt = massa dell’encoder, Nt = numero di righe ottiche.
• Alimentatore: ca = pa Pa = 0,0015 * 2400 = 3,6
Pa = potenza in Watt dell’alimentatore.
• Convertitore D/A cda = pda Nda = 0,05 * 8 = 0,4
Nda = numero di bit del convertitore D/A.
• Controllo: cc = pi Ni + pd Nd + pl Nl = 0,1 * 9,31 + 0,1 *27 + 10 * 1,036 = 13,991
Ni = dimensione in Kbyte del file control.obj,
Nd = dimensione in Kbyte dei dati compilati allocati
dinamicamente,
Nl = dimensione in Kbyte dei dati letti dagli archivi.

GianLuca DeMichelis Controlli Automatici
Pagina 46
Nel grafico seguente ho riportato la ripartizione dei costi nelle varie componenti:
Ripartizione dei costi
Braccio
Motore
Riduttore
Trasduttore
Alimentatore
Convertitore A/D
Controllo
Ricavi attesi
Per calcolare il ricavo atteso moltiplico per opportuni coefficienti la massa utile e la forza
utile fornite dalle specifiche:
R = pu Mu + pf Fu = 15 * 2,65 + 4 * 10 = 79,75
dove Mu la massa utile, Fu la forza utile.

GianLuca DeMichelis Controlli Automatici
Pagina 47
Costo di esercizio
Applico la formula per il calcolo del costo di esercizio: α = αm + αp + αr , così suddiviso:
• Movimentazione più assestamento = 3,418 + 0, 5 sec.
• Precisione: αp = pp σ = 0,2 * 0,298 = 0, 0578 , dove σ il valore efficace dell’ errore di
asservimento in posizione con massa in presa, espresso in mrad.
• Sollecitazione massima sul riduttore: αr = pr (Cmax/Cnom)2 = 0,1*(192/476)2 = 0,01627,
dove Cmax la coppia massima registrata, mentre Cnom la coppia nominale = 476 N m.
Ottengo infine α =0,26997, e riporto nel grafico la distribuzionedei costi:
am73%
ap21%
ar6%

GianLuca DeMichelis Controlli Automatici
Pagina 48
Utile
L’utile si ricava dalla formula U = R (1 - α) - C = 79,75 ( 1- 0,26997) - 57,703 = 0,517
come si può vedere nel grafico seguente, i ricavi e i costi si equiparano:
Ricavi attesi Ricavi reali Costi Utile0
10
20
30
40
50
60
70
80
Ricavi attesi Ricavi reali Costi Utile
(…purtroppo non sono riuscito ad ottenere di meglio.)