Embed Size (px)
Citation preview

A.A. 2003/2004A.A. 2003/2004 Domenico SalimbeniDomenico Salimbeni dia dia 11/198/198
CONTROLLO DEglI impianti termicICONTROLLO DEglI impianti termicI
prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
CSIECSIE -- Corso di Studi in Ingegneria ElettricaCorso di Studi in Ingegneria ElettricaCSIEoCSIEo -- Corso di Studi in Ingegneria ElettrONicaCorso di Studi in Ingegneria ElettrONicaCSIEnCSIEn -- Corso di Studi in Ingegneria EnergeticaCorso di Studi in Ingegneria Energetica
-- Dipartimento di Ingegneria Elettrica ed ElettronicaDipartimento di Ingegneria Elettrica ed ElettronicaFacoltà di IngegneriaFacoltà di Ingegneria
Università degli Studi di CagliariUniversità degli Studi di Cagliari

A.A. 2003/2004A.A. 2003/2004 dia dia 22/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Macroargomenti del programmaMacroargomenti del programma
Introduzione sul controllo di processo e definizioniIntroduzione sul controllo di processo e definizioniCaratteristiche del processo termicoCaratteristiche del processo termicoModalità di intervento del controllo di un processo termicoModalità di intervento del controllo di un processo termicoControllori commercialiControllori commercialiPsicrometria dell’ariaPsicrometria dell’ariaComponenti di analisi dei parametri funzionali (sonde e trasduttComponenti di analisi dei parametri funzionali (sonde e trasduttori)ori)Sistemi di attuazione e valvoleSistemi di attuazione e valvoleRappresentazione ISA Rappresentazione ISA P&IP&ISchemi di controlloSchemi di controlloEserciziEserciziProgetti di sistemi di controlloProgetti di sistemi di controllo
0.00.00.00.00.00.00.00.0

A.A. 2003/2004A.A. 2003/2004 dia dia 33/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
IntroduzioneIntroduzione1.00.00.00.11.00.00.00.1
Lo specialista termotecnico progetta tradizionalmente un impiantLo specialista termotecnico progetta tradizionalmente un impianto tero ter--mico nell’ottica di un’unica specifica di riferimento: il mico nell’ottica di un’unica specifica di riferimento: il benessere benessere psipsi--crometricocrometricoAnche la regolazione automatica si è sviluppata, dapprima in forAnche la regolazione automatica si è sviluppata, dapprima in forma eletma elet--tromeccanica proprietaria poi in forma elettrica, pneumatica ed tromeccanica proprietaria poi in forma elettrica, pneumatica ed elettroelettro--nica sempre più standardizzata, nell’ottica del benessere nica sempre più standardizzata, nell’ottica del benessere psicrometricopsicrometrico, , pur se progettata da uno specialista automatico intervenuto in tpur se progettata da uno specialista automatico intervenuto in tempi empi successivi al completamento della progettazione termotecnicasuccessivi al completamento della progettazione termotecnica
termotecnicotermotecnicotermotecnico impianto termicoimpianto termicoimpianto termico
automaticoautomaticoautomatico regolazioneregolazioneregolazione
impianto termicoregolato automaticamente
impianto termicoimpianto termicoregolato automaticamenteregolato automaticamente

A.A. 2003/2004A.A. 2003/2004 dia dia 44/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Progettazione coordinataProgettazione coordinata
La funzionalità della regolazione automatica (o controllo di proLa funzionalità della regolazione automatica (o controllo di processo) ricesso) ri--chiede un dimensionamento particolare di alcuni componenti dell’chiede un dimensionamento particolare di alcuni componenti dell’impianimpian--to (es.: valvola di regolazione), quindi il coordinamento dei duto (es.: valvola di regolazione), quindi il coordinamento dei due speciae specia--listi nella fase progettuale (listi nella fase progettuale (progettazione coordinataprogettazione coordinata):):
1.00.00.00.21.00.00.00.2
termotecnicotermotecnicotermotecnico impianto termicoimpianto termicoimpianto termico
automaticoautomaticoautomatico regolazioneregolazioneregolazione
impianto termicoregolato automaticamente
impianto termicoimpianto termicoregolato automaticamenteregolato automaticamente
o meglio la coincidenza dei due specialisti (termotecnico e autoo meglio la coincidenza dei due specialisti (termotecnico e automatico)matico)

A.A. 2003/2004A.A. 2003/2004 dia dia 55/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Il fattore energiaIl fattore energia
Le crisi energetiche susseguitesi dopo la guerra dei Le crisi energetiche susseguitesi dopo la guerra dei KippurKippur e le succese le succes--sive guerre nell’Arabia del nord hanno portato alla ribalta una sive guerre nell’Arabia del nord hanno portato alla ribalta una nuova nuova specifica di progetto di un impianto termico: il specifica di progetto di un impianto termico: il risparmio energeticorisparmio energetico
1.00.00.00.31.00.00.00.3
Un impianto termico deve così soddisfare oggi due specifiche fonUn impianto termico deve così soddisfare oggi due specifiche fondada--mentali preminenti:mentali preminenti:
Massimizzazione del benessere Massimizzazione del benessere psicrometricopsicrometrico negli ambienti servitinegli ambienti servitiMinimizzazione del consumo energeticoMinimizzazione del consumo energetico dell’impiantodell’impianto
risultato tutt’altro che utopistico con un buon controllo di prorisultato tutt’altro che utopistico con un buon controllo di processo a cicesso a ci--clo chiusoclo chiuso
per esempio:per esempio: una regolazione automatica che mantenga anche in presenza di cauna regolazione automatica che mantenga anche in presenza di ca--richi esterni minori le condizioni psicrometriche interne determrichi esterni minori le condizioni psicrometriche interne determinaina--te con i carichi esterni estivo e invernale massimi, consente ilte con i carichi esterni estivo e invernale massimi, consente il sodsod--disfacimento contemporaneo di entrambe le specifichedisfacimento contemporaneo di entrambe le specifiche

A.A. 2003/2004A.A. 2003/2004 dia dia 66/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo dei processi (CP)Controllo dei processi (CP)
Il Il Controllo dei processiControllo dei processi ((CPCP) ) può essere definito come l’insieme di può essere definito come l’insieme di operazioni necessarie a far evolvere un processo in modo correttoperazioni necessarie a far evolvere un processo in modo corretto e o e affidabile, secondo regole predeterminate, anche in presenza di affidabile, secondo regole predeterminate, anche in presenza di modimodi--ficazioni che intervengono nell’ambiente esterno o nei parametrificazioni che intervengono nell’ambiente esterno o nei parametri interni interni al processoal processoNel campo termotecnico il Controllo dei processi può essere defiNel campo termotecnico il Controllo dei processi può essere definito nito come l’insieme di operazioni che consentono:come l’insieme di operazioni che consentono:a)a) Il rilevamento del valore della grandezza da controllareIl rilevamento del valore della grandezza da controllareb)b) Il confronto di questo col valore desiderato (setIl confronto di questo col valore desiderato (set--point di controllo)point di controllo)c)c) Il calcolo dell’erroreIl calcolo dell’errored)d) La definizione dell’azione correttiva da applicare al sistema coLa definizione dell’azione correttiva da applicare al sistema controllatontrollatoe)e) L’applicazione dell’azione correttiva L’applicazione dell’azione correttiva
1.00.00.01.11.00.00.01.1

A.A. 2003/2004A.A. 2003/2004 dia dia 77/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Elementi dei sistemi di CPElementi dei sistemi di CP
Elemento fondamentale di un controllo dei processi è l’esistenzaElemento fondamentale di un controllo dei processi è l’esistenza di un di un segnale di controllosegnale di controllo, o , o segnale controllantesegnale controllante,, la cui modifica determina la cui modifica determina una variazione del una variazione del segnale controllatosegnale controllato, caratteristica interessante del , caratteristica interessante del mezzo controllatomezzo controllato
per esempio:per esempio: Nel caso del controllo della temperatura dell’acqua calda per usNel caso del controllo della temperatura dell’acqua calda per uso o sanitario prodotta da un bollitore con primario alimentato con vsanitario prodotta da un bollitore con primario alimentato con vapoapo--re modulato da una valvola a tre vie si ha:re modulato da una valvola a tre vie si ha:
mezzo controllatomezzo controllato :: acquaacquasegnale (o grandezza) controllatosegnale (o grandezza) controllato :: temperaturatemperaturamezzo di controllomezzo di controllo :: vaporevaporesegnale (o grandezza) di controllosegnale (o grandezza) di controllo :: portata del vaporeportata del vapore
1.00.00.01.21.00.00.01.2

A.A. 2003/2004A.A. 2003/2004 dia dia 88/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema minimo di controllo dei processiSistema minimo di controllo dei processi
Un sistema di controllo dei processi è costituito almeno dai segUn sistema di controllo dei processi è costituito almeno dai seguenti uenti componenti:componenti:
1.00.00.01.31.00.00.01.3
ProcessoProcessoG(s)G(s)
ControllreControllreC(z)C(z) AtAt
SensoreSensoreControlloreControlloreAttuatore o organo finale di controlloAttuatore o organo finale di controllo
Se il segnale di riferimento è costante si parla in genere di reSe il segnale di riferimento è costante si parla in genere di regolazione golazione di processo piuttosto che di controllo di processodi processo piuttosto che di controllo di processo
riferimentoriferimento

A.A. 2003/2004A.A. 2003/2004 dia dia 99/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempio di controllo di processo termicoEsempio di controllo di processo termico
Le condizioni al contorno disturbano l’ambiente modificandone leLe condizioni al contorno disturbano l’ambiente modificandone le temperatura sino al temperatura sino al valore valore tt che il sensore rileva e comunica al controlloreche il sensore rileva e comunica al controlloreIl controllore confronta la temperatura Il controllore confronta la temperatura tt col setcol set--point point rr e trasmette al servomotore della e trasmette al servomotore della valvola deviatrice a tre vie (attuatore) un segnale controllantevalvola deviatrice a tre vie (attuatore) un segnale controllante che ordina alla valvola di che ordina alla valvola di far transitare sulla batteria una portata d’acqua maggiore (far transitare sulla batteria una portata d’acqua maggiore (t < rt < r) o minore () o minore (t > rt > r) ) affinché l’aria possa immettere nel locale rispettivamente più oaffinché l’aria possa immettere nel locale rispettivamente più o meno energia termica meno energia termica per compensare la variazione di temperaturaper compensare la variazione di temperatura
1.00.00.01.41.00.00.01.4
Ambiente
T
z
m
Catena di acquisizioneCatena di acquisizioneCatena di attuazioneCatena di attuazione
Ambiente
T
r mz
tAtC(z)
e
t

A.A. 2003/2004A.A. 2003/2004 dia dia 1010/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Schema tipo di un controllo di processoSchema tipo di un controllo di processo
Il controllo dei processi può essere Il controllo dei processi può essere analogicoanalogico o o digitaledigitale, anche se oggi è , anche se oggi è quasi esclusivamente digitale:quasi esclusivamente digitale:
yyksks
sensoresensore
G(s)G(s)yyrr ++
__ee m°m°
KaKaG(z)G(z) DADAADAD
controllorcontrolloree
1.00.00.01.51.00.00.01.5
Valore controllatoValore controllato((controlcontrol--pointpoint))
(che può pendolare)(che può pendolare)
Valore di Valore di riferimentoriferimento(set(set--point)point)
(Desiderato?)(Desiderato?)
Errore o deviazioneErrore o deviazioneIstantanei o a regimeIstantanei o a regime Azione controllanteAzione controllante
SensoreSensore
AttuatoreAttuatore

A.A. 2003/2004A.A. 2003/2004 dia dia 1111/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Catena di acquisizione e attuazioneCatena di acquisizione e attuazione
Schema tecnologico di un sistema di controlloSchema tecnologico di un sistema di controlloAnello di controllo a più loop:Anello di controllo a più loop:
1.00.00.01.61.00.00.01.6
rr ++
__
Unità di controllo digitaleUnità di controllo digitale sensorisensori
mm
attuatoriattuatori
A.A. 2003/2004A.A. 2003/2004 dia dia 1212/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sorgente di energiaSorgente di energia
In funzione della sorgente di energia utilizzata i sistemi di coIn funzione della sorgente di energia utilizzata i sistemi di controllo/rentrollo/re--golazione dei processi termici possono essere classificati in:golazione dei processi termici possono essere classificati in:
AutoazionatiAutoazionati energia derivata dall’elemento sensibileenergia derivata dall’elemento sensibileElettriciElettrici energia elettrica BTS o BT 24energia elettrica BTS o BT 24÷÷220 V220 VPneumaticiPneumatici energia meccanica da aria compressaenergia meccanica da aria compressaElettroniciElettronici energia elettrica BTS 24 V 4energia elettrica BTS 24 V 4÷÷20 mA20 mA
1.00.00.02.11.00.00.02.1

A.A. 2003/2004A.A. 2003/2004 dia dia 1313/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Processo termicoProcesso termico
I processi termici sono descrivibili in modo sufficientemente prI processi termici sono descrivibili in modo sufficientemente preciso eciso mediante modelli matematici del primo o del secondo ordine, in emediante modelli matematici del primo o del secondo ordine, in entramntram--bi i casi con un eventuale ritardo finitobi i casi con un eventuale ritardo finito
1.01.00.00.11.01.00.00.1
Il modello matematico del processo di riscaldaIl modello matematico del processo di riscalda--mento dell’acqua è retto dal principio di conmento dell’acqua è retto dal principio di con--servazione dell’energia:servazione dell’energia:
( ) Φ+−⋅== ∑ uii
HHGPdtdE ( ) Φ+−⋅== ∑ ui
iHHGP
dtdE
G = portata; P = potenza; E = energia; H = entalpiaG = portata; P = potenza; E = energia; H = entalpia
( ) Φ+−⋅⋅=⋅⋅ uiu TTGc
dtdTcm ( ) Φ+−⋅⋅=⋅⋅ ui
u TTGcdt
dTcm
m = massa; c = calore specificom = massa; c = calore specifico

A.A. 2003/2004A.A. 2003/2004 dia dia 1414/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Ritardo finitoRitardo finito
Un ritardo finito è descritto dalla Un ritardo finito è descritto dalla FdTFdT::
1.01.00.01.11.01.00.01.1
sTekFdT ⋅−⋅= sTekFdT ⋅−⋅=
e ha la seguente risposta e ha la seguente risposta indiciaindicia--lele ((∆∆=ampiezza=ampiezza ingresso, k=1):ingresso, k=1):
( )Ttkty −⋅⋅∆=)( ( )Ttkty −⋅⋅∆=)(
1,51,5
1,01,0
0,50,5
0,00,0tt
0 5 10 15 200
5
5
5
1
5
5
TTEsempio di ritardo finito:Esempio di ritardo finito:Un serbatoio idrico è alimentato Un serbatoio idrico è alimentato tramite una tubazione corredata tramite una tubazione corredata da valvola di intercettazione moda valvola di intercettazione mo--torizzata asservita a un controltorizzata asservita a un control--lore di livellolore di livello
dd

A.A. 2003/2004A.A. 2003/2004 dia dia 1515/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Processi di 1° ordine (con ritardo)Processi di 1° ordine (con ritardo)
sTeskFdT ⋅−⋅+⋅τ
=1
sTeskFdT ⋅−⋅+⋅τ
=1
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⋅∆= τ
−−
Tt
ekty 1)( ⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅⋅∆= τ
−−
Tt
ekty 1)(
1.01.00.02.11.01.00.02.1
1,51,5
1,01,0
0,50,5
0,00,0tt
Un processo di 1° ordine con riUn processo di 1° ordine con ri--tardo T è descritto dalla tardo T è descritto dalla FdTFdT::
e ha le seguente risposta e ha le seguente risposta indiciaindicia--lele ((∆∆=ampiezza=ampiezza ingresso, k=1):ingresso, k=1):
TT
RR11
ττ
La risposta di un processo di 1° ordine è caratterizzata da:La risposta di un processo di 1° ordine è caratterizzata da:Costante di tempo Costante di tempo ττ (tempo necessario per (tempo necessario per ∆∆y=63,2% o tempo definito y=63,2% o tempo definito daldal--l’l’intersezione della tangente alla risposta nell’origine con yintersezione della tangente alla risposta nell’origine con y∞∞))Tempo di reazione ATempo di reazione A (tempo necessario per (tempo necessario per ∆∆y=1)y=1)Velocità di reazione RVelocità di reazione R ((∆∆yy in 1,0 s)in 1,0 s)
0,6320,632
ττ d

A.A. 2003/2004A.A. 2003/2004 dia dia 1616/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Processi di 2° ordine (con ritardo)Processi di 2° ordine (con ritardo)
Un processo termico può essere approssimato meglio di quanto conUn processo termico può essere approssimato meglio di quanto consensen--ta un modello del 1° ordine ta un modello del 1° ordine utilizandoutilizando un modello matematico del 2° orun modello matematico del 2° or--dine:dine:
1.01.00.03.11.01.00.03.1
sTesasa
kFdT ⋅−⋅+⋅+⋅
=11
22
sTesasa
kFdT ⋅−⋅+⋅+⋅
=11
22
sT
nn
ess
kFdT ⋅−⋅+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ωζ⋅
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ω
=121 2
2
sT
nn
ess
kFdT ⋅−⋅+⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛ωζ⋅
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ω
=121 2
2
o anche:o anche:
dove:dove:ζζ = fattore di smorzamento= fattore di smorzamentoωωnn = frequenza naturale= frequenza naturaleTT = eventuale ritardo= eventuale ritardo
2
1
2 aa⋅
=ζ2
1
2 aa⋅
=ζ
2
1an =ω
2
1an =ω
La risposta può essere:La risposta può essere:sovrasmorzatasovrasmorzata ((ζζ > 1)> 1)a smorzamento critico a smorzamento critico ((ζζ = 1)= 1)sottosmorzata sottosmorzata ((ζζ < 1)< 1)
Il modello matematico può essere scritto nella Il modello matematico può essere scritto nella forma:forma:
( )sTe
skFdT ⋅−⋅+⋅τ
= 21( )sTe
skFdT ⋅−⋅+⋅τ
= 21

A.A. 2003/2004A.A. 2003/2004 dia dia 1717/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Risposta del 2° ordine sottosmorzataRisposta del 2° ordine sottosmorzata
La risposta La risposta indicialeindiciale di un sistedi un siste--ma del 2° ordine, con ingresso di ma del 2° ordine, con ingresso di ampiezza 1 e k=1, ha la forma:ampiezza 1 e k=1, ha la forma:
1,51,5
1,01,0
0,50,5
0,00,0tt
1.01.00.03.21.01.00.03.2
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ζ−
ζ−⋅ω⋅ζ−⋅⋅
ωω
−= −⋅ζ⋅ω−
2
12
11cos1)( tgtety n
t
d
n n
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ζ−
ζ−⋅ω⋅ζ−⋅⋅
ωω
−= −⋅ζ⋅ω−
2
12
11cos1)( tgtety n
t
d
n n
La risposta di un sistema del 2° La risposta di un sistema del 2° ordine è caratterizzata dai paraordine è caratterizzata dai para--metri evidenziati nella diapositiva che segue, ma anche da una cmetri evidenziati nella diapositiva che segue, ma anche da una costante ostante di tempo “globale” di tempo “globale” ττ==((ζ⋅ωζ⋅ωnn))--11, definita come la costante di tempo pre, definita come la costante di tempo pre--dominante dell’esponenziale che inviluppa la risposta transitoridominante dell’esponenziale che inviluppa la risposta transitoria, (tempo a, (tempo necessario per necessario per ∆∆y=63,2% o tempo definito dall’intersezione della tany=63,2% o tempo definito dall’intersezione della tan--gente alla risposta nell’origine con ygente alla risposta nell’origine con y∞∞))
τ
0,6320,632
A.A. 2003/2004A.A. 2003/2004 dia dia 1818/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Parametri della risposta sottosmorzataParametri della risposta sottosmorzata
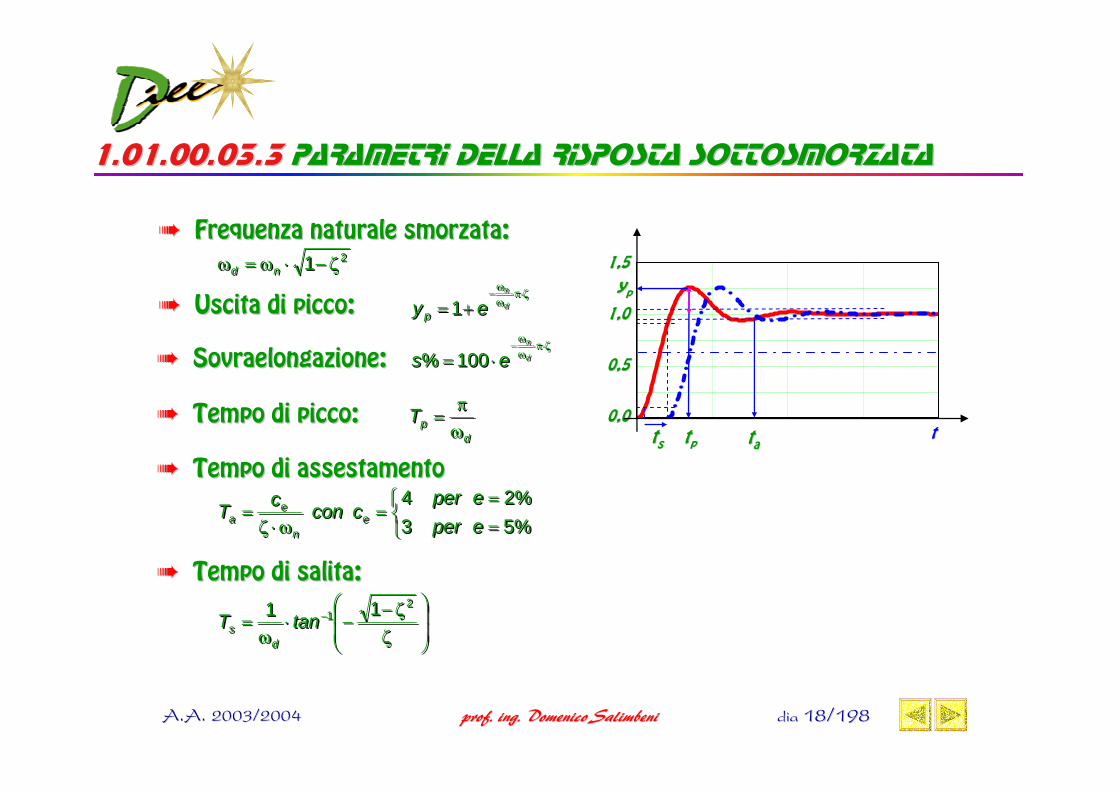
Frequenza naturale smorzata:Frequenza naturale smorzata:1,51,5
1,01,0
0,50,5
0,00,0tt
1.01.00.03.31.01.00.03.3
21 ζ−⋅ω=ω nd21 ζ−⋅ω=ω nd
Tempo di salita:Tempo di salita:
Uscita di picco:Uscita di picco: ζ⋅π⋅ωω
−
+= d
n
eyp 1ζ⋅π⋅
ωω
−
+= d
n
eyp 1
SovraelongazioneSovraelongazione:: ζ⋅π⋅ωω
−
⋅= d
n
es 100%ζ⋅π⋅
ωω
−
⋅= d
n
es 100%
Tempo di picco:Tempo di picco:d
pTωπ
=d
pTωπ
=
Tempo di assestamentoTempo di assestamento
⎩⎨⎧
==
=ω⋅ζ
=%53%24
epereper
cconcT en
ea
⎩⎨⎧
==
=ω⋅ζ
=%53%24
epereper
cconcT en
ea
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ζζ−
−⋅ω
= −2
1 11 tanTd
s ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ζζ−
−⋅ω
= −2
1 11 tanTd
s
yypp
ttpp ttaattss

A.A. 2003/2004A.A. 2003/2004 dia dia 1919/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Modalità d’intervento dei controlloriModalità d’intervento dei controllori
In funzione delle modalità d’intervento i sistemi di controllo/rIn funzione delle modalità d’intervento i sistemi di controllo/regolaegola--zione dei processi termici possono essere classificati in:zione dei processi termici possono essere classificati in:1)1) ControlloControllo OnOn--OffOff Intervento a relé con 2 stati o tuttoIntervento a relé con 2 stati o tutto--nienteniente
Intervento a relé con 3Intervento a relé con 3÷÷5 stati5 stati2)2) ControlloControllo PP Intervento proporzionaleIntervento proporzionale3)3) ControlloControllo PIPI Intervento proporzionale+integraleIntervento proporzionale+integrale4)4) ControlloControllo PIDPID Intervento proporzionale+integrale+derivativoIntervento proporzionale+integrale+derivativo5)5) ControlloControllo digitaledigitale Intervento P o PI o PID in forma digitaleIntervento P o PI o PID in forma digitale6)6) ControlloControllo FuzzyFuzzy
1.02.00.00.01.02.00.00.0
Controllori analogiciControllori analogici
Intervento secondo una logica di appartenenza Intervento secondo una logica di appartenenza sfumata a stati contrappostisfumata a stati contrapposti

A.A. 2003/2004A.A. 2003/2004 dia dia 2020/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo onControllo on--offoff
Il segnale di controllo può assumere solo due valori:Il segnale di controllo può assumere solo due valori:Presente Presente –– ON ON –– IIAssente Assente –– OFF OFF –– OO
Il controllore confronta il valore effettivo con quello prefissaIl controllore confronta il valore effettivo con quello prefissato, e deterto, e deter--mina la posizione dell’attuatore in base al segno dell’erroremina la posizione dell’attuatore in base al segno dell’erroreIl rumore di misura, o l’oscillazione del valore controllato attIl rumore di misura, o l’oscillazione del valore controllato attorno al vaorno al va--lore di riferimento, possono provocare commutazioni frequenti e lore di riferimento, possono provocare commutazioni frequenti e usurausura--re velocemente l’attuatore, oltre a disturbare l’anello di contrre velocemente l’attuatore, oltre a disturbare l’anello di controlloolloPer evitare questo inconveniente il controllore onPer evitare questo inconveniente il controllore on--off contiene un’istereoff contiene un’istere--si, che determina un piccolo campo d’insensibilità, detto si, che determina un piccolo campo d’insensibilità, detto differenzialedifferenziale, , (zona morta) di ampiezza compresa tipicamente nel campo 0,1(zona morta) di ampiezza compresa tipicamente nel campo 0,1÷÷10% di 10% di eeMaxMax
1.02.01.01.11.02.01.01.1

A.A. 2003/2004A.A. 2003/2004 dia dia 2121/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Contatti elettriciContatti elettrici
In genere un controllore a 2 posizioni applica il segnale di conIn genere un controllore a 2 posizioni applica il segnale di controllo tratrollo tra--mite contatti elettrici (interruttori o deviatori) sia NA (normamite contatti elettrici (interruttori o deviatori) sia NA (normalmente almente a--perti) sia NC (normalmente chiusi)perti) sia NC (normalmente chiusi)I contatti elettrici possono essere classificati anche in funzioI contatti elettrici possono essere classificati anche in funzione del nune del nu--mero di poli (single, mero di poli (single, doubledouble) e del numero di circuiti () e del numero di circuiti (throwthrow) asserviti:) asserviti:
1.02.01.01.21.02.01.01.2
Interruttore Interruttore unipolareunipolare SPSTSPST
Deviatore Deviatore unipolareunipolare SPDTSPDT
Interruttore bipolareInterruttore bipolare DPSTDPST
Deviatore bipolareDeviatore bipolare DPDTDPDT
I contatti SPST possono esI contatti SPST possono es--sere utilizzati per azionare il sere utilizzati per azionare il motore di una pompa di umimotore di una pompa di umi--dificazione o attuatori simili, dificazione o attuatori simili, ma non un servomotore bidima non un servomotore bidi--rezionale, che necessita di rezionale, che necessita di contatti SPDTcontatti SPDT

A.A. 2003/2004A.A. 2003/2004 dia dia 2222/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
DifferenzialeDifferenziale
Il differenziale è un campo di insensibilità poIl differenziale è un campo di insensibilità po--sizionato sopra o sotto il setsizionato sopra o sotto il set--point al cui inpoint al cui in--terno le variazioni del segnale regolato non terno le variazioni del segnale regolato non hanno effettohanno effettoL’ampiezza L’ampiezza ∆∆ del differenziale è fondamentadel differenziale è fondamenta--le nel funzionamento del regolatore onle nel funzionamento del regolatore on--offoff
1.02.01.02.11.02.01.02.1
∆∆
setset--pointpoint
Raramente, e solo nei casi più elementari, la regolazione onRaramente, e solo nei casi più elementari, la regolazione on--off è utilizoff è utiliz--zata come regolazione vera e propria, in quanto il differenzialezata come regolazione vera e propria, in quanto il differenziale non connon con--sente il mantenimento di un valore controllato costantesente il mantenimento di un valore controllato costanteIl regolatore onIl regolatore on--off trova invece applicazione diffusa solo nella segnalaoff trova invece applicazione diffusa solo nella segnala--zione di limiti e allarmizione di limiti e allarmiIl differenziale è normalmente fisso, ma può essere tarabileIl differenziale è normalmente fisso, ma può essere tarabile
mm
ee

A.A. 2003/2004A.A. 2003/2004 dia dia 2323/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Relé a più posizioniRelé a più posizioni
Generalizzazione del relé a due posizioni nel quale l’uscita puòGeneralizzazione del relé a due posizioni nel quale l’uscita può assumere assumere tre o più posizionitre o più posizioni
1.02.01.03.11.02.01.03.1
Nel caso di tre livelli l’uscita potrebbe valeNel caso di tre livelli l’uscita potrebbe vale--re, a titolo di esempio, 0re, a titolo di esempio, 0÷÷5050÷÷100% oppure, 100% oppure, come nella figura, come nella figura, --100100÷÷00÷÷100%100%
mm
ee
setset--pointpointsetset--pointpoint
∆∆
∆∆
Il controllo a più posizioni è meno diffuso di Il controllo a più posizioni è meno diffuso di quello a due posizioni per la difficoltà d’imquello a due posizioni per la difficoltà d’im--plementazione con amplificatori tradizionaliplementazione con amplificatori tradizionaliUn sistema di controllo digitale, invece, non presenta difficoltUn sistema di controllo digitale, invece, non presenta difficoltà d’impleà d’imple--mentazione del relé a più posizionimentazione del relé a più posizioni

A.A. 2003/2004A.A. 2003/2004 dia dia 2424/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
RitardoRitardo
In un dispositivo onIn un dispositivo on--off il valore regolato off il valore regolato supera sempre i limiti del differenziale, a supera sempre i limiti del differenziale, a causa dell’inerzia del processo, provocancausa dell’inerzia del processo, provocan--do un ritardo nella risposta reale del sido un ritardo nella risposta reale del si--stema che ne preclude l’utilizzazione in stema che ne preclude l’utilizzazione in sistemi troppo velocisistemi troppo veloci
1.02.01.04.11.02.01.04.1
yy
tt
setset--pointpoint∆∆
ritardoritardo
ritardoritardo
OFFOFF
ONON

A.A. 2003/2004A.A. 2003/2004 dia dia 2525/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Anticipazione elettricaAnticipazione elettrica1.02.01.05.11.02.01.05.1
Il ritardo d’intervento del regolatore a due posizioni può esserIl ritardo d’intervento del regolatore a due posizioni può essere ridotto e ridotto con un sistema di anticipazione, che ha trovato ampia applicaziocon un sistema di anticipazione, che ha trovato ampia applicazione negli ne negli interruttori termici ambienteinterruttori termici ambienteIn un interruttore termico è diffusa l’anticipazione elettrica, In un interruttore termico è diffusa l’anticipazione elettrica, realizzata realizzata con una resistenza che dissipa energia per effetto Joule in condcon una resistenza che dissipa energia per effetto Joule in condizioni di izioni di richiesta di caldorichiesta di caldo
T
220 V
F
N
Un interruttore termico ad anticipazione elettrica Un interruttore termico ad anticipazione elettrica non può comandare direttamente servomotori renon può comandare direttamente servomotori re--versibili, o motori di versibili, o motori di ventilconvettoriventilconvettori con commutacon commuta--zione centralizzatazione centralizzata

A.A. 2003/2004A.A. 2003/2004 dia dia 2626/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo PControllo P1.02.02.01.11.02.02.01.1
Il metodo di controllo più spontaneo per mantenere un segnale alIl metodo di controllo più spontaneo per mantenere un segnale al valore valore desiderato è quello proporzionale, che stabilisce fra il segnaledesiderato è quello proporzionale, che stabilisce fra il segnale controlcontrol--lante e il segnale controllato una relazione rigida descritlante e il segnale controllato una relazione rigida descritta, con ta, con rifeririferi--
mento allo schema a lato, dal mento allo schema a lato, dal modello matematico:modello matematico: Ambiente
T
r mz
yAtC(z)
e
y
ee
tt tt
mm
ekm p ∆⋅=∆ ekm p ∆⋅=∆
Caratteristica principale: il seCaratteristica principale: il se--gnale di controllo può assumegnale di controllo può assume--re infiniti valori, proporzionali re infiniti valori, proporzionali all’errore, nella corsa dell’all’errore, nella corsa dell’atat--tuatoretuatore e nel campo di variae nel campo di varia--
zionezione del segnale controllato, detto del segnale controllato, detto banda proporzionalebanda proporzionale 1pk−1pk−

A.A. 2003/2004A.A. 2003/2004 dia dia 2727/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Banda proporzionaleBanda proporzionale1.02.02.01.21.02.02.01.2
mm
ee
100%
50%
0%SetSet--pontpont
banda proporzionalebanda proporzionaleSpesso il guadagno proporzionale è espresso Spesso il guadagno proporzionale è espresso in forma normalizzata:in forma normalizzata:
100% 50% 25%Spesso Spesso la banda proporzionale è tarabilela banda proporzionale è tarabile per per adeguare la sensibilità del controllore all’imadeguare la sensibilità del controllore all’im--pianto mediante variazione del guadagno pianto mediante variazione del guadagno proporzionaleproporzionale
e la banda proporzionale rappresenta l’ampiezza percentuale delle la banda proporzionale rappresenta l’ampiezza percentuale dell’errore ’errore corrispondente al valore massimo del segnale di controllocorrispondente al valore massimo del segnale di controllo
pkpk
Max
Maxp ee
mmk
//
=Max
Maxp ee
mmk
//
=
L’instabilità dell’attuatore indica una banda proporzionale tropL’instabilità dell’attuatore indica una banda proporzionale troppo stretpo stret--ta, ma un’ampiezza maggiore rende il sistema meno sensibile e rata, ma un’ampiezza maggiore rende il sistema meno sensibile e rapidopido

A.A. 2003/2004A.A. 2003/2004 dia dia 2828/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Banda proporzionale (Esempio di calcolo)Banda proporzionale (Esempio di calcolo)
Una valvola motorizzata (Una valvola motorizzata (attuatoreattuatore) asservita a un regolatore con cam) asservita a un regolatore con cam--po 0po 0÷÷200200 C deve compiere la corsa completa al variare della temperatuC deve compiere la corsa completa al variare della temperatu--ra controllata nel campo 70ra controllata nel campo 70÷÷120 C (banda proporzionale)120 C (banda proporzionale)Determinare la posizione percentuale del cursore di selezione deDeterminare la posizione percentuale del cursore di selezione della banlla ban--da proporzionaleda proporzionale
1.02.02.01.31.02.02.01.3
Si ha:Si ha: %2525,010020050100
20070120100
CBP%p ==⎟
⎠
⎞⎜⎝
⎛ ⋅=⎟⎠
⎞⎜⎝
⎛ ⋅−
=⎟⎠
⎞⎜⎝
⎛ ⋅= %2525,010020050100
20070120100
CBP%p ==⎟
⎠
⎞⎜⎝
⎛ ⋅=⎟⎠
⎞⎜⎝
⎛ ⋅−
=⎟⎠
⎞⎜⎝
⎛ ⋅=
Infatti:Infatti: CBP 50200%25 =⋅= CBP 50200%25 =⋅=
Il calcolo teorico deve essere sempre verificato in campo:Il calcolo teorico deve essere sempre verificato in campo:Se l’Se l’attuatoreattuatore “pendola” (oscilla velocemente fra le due posizioni estre“pendola” (oscilla velocemente fra le due posizioni estre--me) la BP è troppo strettame) la BP è troppo strettaSe l’Se l’attuatoreattuatore si rivela poco sensibile e si fa sfuggire la grandezza controlsi rivela poco sensibile e si fa sfuggire la grandezza control--lata la BP è troppo ampialata la BP è troppo ampia
A.A. 2003/2004A.A. 2003/2004 dia dia 2929/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Limiti del controllo PLimiti del controllo P
Il controllo proporzionale soddisfa solo se è tollerabile uno scIl controllo proporzionale soddisfa solo se è tollerabile uno scostamento ostamento residuo del segnale controllato dal valore desiderato, cioè un eresiduo del segnale controllato dal valore desiderato, cioè un errore a rrore a regime non nulloregime non nulloIl controllore P è infatti di tipo “0”, quindi risponde ad un seIl controllore P è infatti di tipo “0”, quindi risponde ad un segnale di rignale di ri--ferimento a gradino con un errore a regime “di posizione”:ferimento a gradino con un errore a regime “di posizione”:
1.02.02.01.41.02.02.01.4
pp k1
ee+∆
=p
p k1ee
+∆
=
L’errore è inversamente proporzionale al guadagno proporzionale,L’errore è inversamente proporzionale al guadagno proporzionale, che che dovrebbe essere dovrebbe essere elavatoelavato anche se è limitato superiormente da problemi anche se è limitato superiormente da problemi d’instabilitàd’instabilitàL’errore a regime presente nel controllo P è in genere ininfluenL’errore a regime presente nel controllo P è in genere ininfluente nell’ete nell’e--sercizio di un impianto termico, ma può essere eliminato svincolsercizio di un impianto termico, ma può essere eliminato svincolandosi andosi dalla relazione lineare fra segnale controllato e segnale di condalla relazione lineare fra segnale controllato e segnale di controllotrollo

A.A. 2003/2004A.A. 2003/2004 dia dia 3030/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
DirettaDiretta se l’aumento del segnale controllato dese l’aumento del segnale controllato de--termina un aumento del segnale di controllotermina un aumento del segnale di controlloInversaInversa se l’aumento del segnale controllato se l’aumento del segnale controllato determina una diminuzione del segnale di condetermina una diminuzione del segnale di con--trollotrollo
Azione di controllore P e attuatoriAzione di controllore P e attuatori1.02.02.02.11.02.02.02.1
100%
50%
0%
mm
yySetSet--pontpontbanda proporzionalebanda proporzionale
Gli organi finali d’attuazione asserviti al controllore possono Gli organi finali d’attuazione asserviti al controllore possono essere deessere de--finiti:finiti:
NANA (normalmente aperti) se in assenza del segnale di controllo van(normalmente aperti) se in assenza del segnale di controllo vanno in posino in posi--zione di apertura completa, quindi non intercettano il mezzo conzione di apertura completa, quindi non intercettano il mezzo controllatotrollatoNCNC (normalmente chiusi) se in assenza del segnale di controllo van(normalmente chiusi) se in assenza del segnale di controllo vanno in posino in posi--zione di chiusura completa, quindi intercettano il mezzo controlzione di chiusura completa, quindi intercettano il mezzo controllatolato
azione inversaazione inversaazione direttaazione direttaL’azione di un regolatore proporzionale può L’azione di un regolatore proporzionale può
essere definita:essere definita:

A.A. 2003/2004A.A. 2003/2004 dia dia 3131/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
azione dei controllori/attuatoriazione dei controllori/attuatori1.02.02.02.21.02.02.02.2
Esempio:Esempio: Si vuole controllare la temperatura del secondario di una batterSi vuole controllare la temperatura del secondario di una batteria ia ad acqua calda con una valvola a 2 vie NC asservita a un controlad acqua calda con una valvola a 2 vie NC asservita a un controllolo--re P di temperatura ambiente. Che azione deve avere?re P di temperatura ambiente. Che azione deve avere?
All’aumento della temperatura ambiente:All’aumento della temperatura ambiente:a)a) Un controllore ad azione diretta aumenta il segnale di controlloUn controllore ad azione diretta aumenta il segnale di controllo ed ed
apre la valvola a 2 vie che all’annullarsi del segnale va in posapre la valvola a 2 vie che all’annullarsi del segnale va in posizione di izione di chiusurachiusura
b)b) Un controllore ad azione inversa diminuisce il segnale di controUn controllore ad azione inversa diminuisce il segnale di controllo e llo e chiude la valvola a 2 vie che all’annullarsi del segnale va in pchiude la valvola a 2 vie che all’annullarsi del segnale va in posizione osizione di chiusuradi chiusura
a)a) Un controllore ad azione diretta aumenta il segnale di controlloUn controllore ad azione diretta aumenta il segnale di controllo ed ed apre la valvola a 2 vie che all’annullarsi del segnale va in posapre la valvola a 2 vie che all’annullarsi del segnale va in posizione di izione di chiusurachiusura
a)a) Un controllore ad azione inversa diminuisce il segnale di controUn controllore ad azione inversa diminuisce il segnale di controllo e llo e chiude la valvola a 2 vie che all’annullarsi del segnale va in pchiude la valvola a 2 vie che all’annullarsi del segnale va in posizione osizione di chiusuradi chiusura
NO!NO!
SI!SI!

A.A. 2003/2004A.A. 2003/2004 dia dia 3232/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Posizione di riposo negli attuatori a 3 viePosizione di riposo negli attuatori a 3 vie
Le valvole a 3 vie ne hanno due sempre Le valvole a 3 vie ne hanno due sempre aperte, quindi vengono classificate NA o aperte, quindi vengono classificate NA o NC in funzione del solo passaggio direttoNC in funzione del solo passaggio diretto
1.02.02.02.31.02.02.02.3
La classificazione vale ovviamente solo se La classificazione vale ovviamente solo se la valvola è montata correttamentela valvola è montata correttamenteSi può ovviare ad un montaggio errato della valvoSi può ovviare ad un montaggio errato della valvo--la invertendo l’azione del controllore, anche se l’inla invertendo l’azione del controllore, anche se l’in--tervento sarebbe scorretto dal punto di vista del tervento sarebbe scorretto dal punto di vista del controllo in quanto ne penalizzerebbe la precisionecontrollo in quanto ne penalizzerebbe la precisione
NO!NO! SI!SI!
Esempio: una valvola a tre vie NC ad azione inverEsempio: una valvola a tre vie NC ad azione inver--sa come deve essere montata?sa come deve essere montata?

A.A. 2003/2004A.A. 2003/2004 dia dia 3333/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
SaturazioneSaturazione
Nell’azione proporzionale la relazione Nell’azione proporzionale la relazione ee--mm è espressa tramite un’equaè espressa tramite un’equa--zione lineare, ma nella crescita di m esiste un limite legato aizione lineare, ma nella crescita di m esiste un limite legato ai vincoli delvincoli del
1.02.02.03.11.02.02.03.1
Le azioni diretta e inversa reali sono pertanto Le azioni diretta e inversa reali sono pertanto quelle evidenziate nel diagramma a latoquelle evidenziate nel diagramma a lato
100%
50%
0%
mm
yy
SetSet--pontpont
BPBP
azione inversaazione inversaazione direttaazione diretta
La saturazione dell’azione proporzionale svolge le funzioni di La saturazione dell’azione proporzionale svolge le funzioni di desaturatodesaturato--rere dei limiti fisici reali, in quanto anche con m in saturazione idei limiti fisici reali, in quanto anche con m in saturazione il controllore l controllore continua a integrare l’errore (continua a integrare l’errore (windapwindap), quindi potrebbe portare m a valori ), quindi potrebbe portare m a valori elevati e richiedere un tempo molto lungo per riassumere valori elevati e richiedere un tempo molto lungo per riassumere valori normalinormali
movimento fisico dei componenti meccanici, movimento fisico dei componenti meccanici, idraulici e pneumatici, alle caratteristiche fiidraulici e pneumatici, alle caratteristiche fi--siche dei mezzi interessati, e alle tensioni di siche dei mezzi interessati, e alle tensioni di saturazione dei regolatori elettronicisaturazione dei regolatori elettronici

A.A. 2003/2004A.A. 2003/2004 dia dia 3434/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo IControllo I1.02.03.01.11.02.03.01.1
L’inconveniente dell’errore a regime non nullo può essere eliminL’inconveniente dell’errore a regime non nullo può essere eliminato reaato rea--lizzando un controllore in grado di applicare un segnale di contlizzando un controllore in grado di applicare un segnale di controllo con rollo con gradiente (velocità) proporzionale al segnale d’errore:gradiente (velocità) proporzionale al segnale d’errore:
Ambiente
T
r mz
yAtC(z)
e
y
ee
tt tt
mm
∫ ⋅⋅τ
=tI
c tektm d)( ∫ ⋅⋅τ
=tI
c tektm d)(
Il controllore I è dunque di tipo Il controllore I è dunque di tipo “1”, quindi risponde ad un se“1”, quindi risponde ad un se--gnale di riferimento a gradino gnale di riferimento a gradino con un errore a regime “di pocon un errore a regime “di po--sizione” nullosizione” nulloIl tempo necessario all’attuatoIl tempo necessario all’attuato--
)( tektm
I
c ⋅τ
=dd )( tek
tm
I
c ⋅τ
=dd
, cioè, cioè
sksMI
c
⋅τ=)(
sksMI
c
⋅τ=)(
kkcc11
1vv k−=τ 1vv k−=τ
re per compiere una corsa completa con la sola azione integrale re per compiere una corsa completa con la sola azione integrale è eè e--spresso dalla spresso dalla costante di tempocostante di tempo
ττII

A.A. 2003/2004A.A. 2003/2004 dia dia 3535/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo PIControllo PI
Il controllo PI è una combinazione dei controlli proporzionale eIl controllo PI è una combinazione dei controlli proporzionale e integrale integrale descritta dal modello matematico:descritta dal modello matematico:
1.02.03.01.21.02.03.01.2
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅
τ+⋅= ∫tI
p tte1tektm d)()()( ⎟⎟⎠
⎞⎜⎜⎝
⎛⋅⋅
τ+⋅= ∫tI
p tte1tektm d)()()( )()( sEs
11ksMI
p ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅τ
+⋅= )()( sEs
11ksMI
p ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅τ
+⋅=
Nel controllo PI la risposta a gradino è rappresentabile nel segNel controllo PI la risposta a gradino è rappresentabile nel seguente uente modo:modo: ee
tt tt
mmkkpp
11kkpp
ττΙΙ
da cui si vede come da cui si vede come ττII rapprerappre--senti il tempo necessario all’asenti il tempo necessario all’a--zione integrale per eguagliare zione integrale per eguagliare l’uscita proporzionalel’uscita proporzionale ( )
tpI
pI
Iekte
km
=τ⋅=⋅⋅
τ= ( )
tpI
pI
Iekte
km
=τ⋅=⋅⋅
τ=

A.A. 2003/2004A.A. 2003/2004 dia dia 3636/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Limiti del controllo PILimiti del controllo PI
L’inerzia dell’attuatore provoca oscillazioni, quindi instabilitL’inerzia dell’attuatore provoca oscillazioni, quindi instabilità, al ragà, al rag--giungimento del valore desiderato del segnale controllato, quandgiungimento del valore desiderato del segnale controllato, quando il seo il se--gnale di controllo dovrebbe annullarsignale di controllo dovrebbe annullarsiInoltre:Inoltre:
L’azione integrale ha un polo nell’origine che introduce un ritaL’azione integrale ha un polo nell’origine che introduce un ritardo di 90° rdo di 90° nella FdT d’anello, e sopratutto la rende non asintoticamente stnella FdT d’anello, e sopratutto la rende non asintoticamente stabileabileIl segnale di controllo può andare in saturazione a causa dei liIl segnale di controllo può andare in saturazione a causa dei limiti fisici miti fisici dell’attuatore, facendo evolvere il processo senza retroazione, dell’attuatore, facendo evolvere il processo senza retroazione, come se come se fosse a ciclo apertofosse a ciclo apertoIn questa situazione un sistema non asintoticamente stabile può In questa situazione un sistema non asintoticamente stabile può allontanarallontanar--si anche notevolmente dal campo di valori utili per il controllosi anche notevolmente dal campo di valori utili per il controllo e non essere e non essere in grado di riprendere immediatamente il controllo del sistema ain grado di riprendere immediatamente il controllo del sistema appena il ppena il segnale di controllo esce dalla condizione di saturazione (segnale di controllo esce dalla condizione di saturazione (windwind--upup))
1.02.03.01.31.02.03.01.3

A.A. 2003/2004A.A. 2003/2004 dia dia 3737/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
L’inconveniente delle oscillazioni può essere eliminato con un cL’inconveniente delle oscillazioni può essere eliminato con un controlontrol--lore in grado di applicare un segnale di controllo proporzionalelore in grado di applicare un segnale di controllo proporzionale al graal gra--diente di velocità (accelerazione) del segnale d’errore:diente di velocità (accelerazione) del segnale d’errore:
Controllo DControllo D1.02.04.01.11.02.04.01.1
tektm dp d
d⋅τ⋅=)(
tektm dp d
d⋅τ⋅=)( sksM dp ⋅τ⋅=)( sksM dp ⋅τ⋅=)(
Ambiente
T
r mz
yAtC(z)
e
y
ee
tt tt
mm
11
La risposta al gradino risulta La risposta al gradino risulta un impulsoun impulso
ne segue che è più pratico stune segue che è più pratico stu--diare la risposta alla rampadiare la risposta alla rampaIl controllo D non presenta inIl controllo D non presenta in--teresse pratico, ma è utile coteresse pratico, ma è utile co--me completamento delle aziome completamento delle azio--ni P ed Ini P ed I

A.A. 2003/2004A.A. 2003/2004 dia dia 3838/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo PDControllo PD
Il controllo PD è una combinazione dei controlli proporzionale eIl controllo PD è una combinazione dei controlli proporzionale e derivaderiva--tivo descritta dal modello matematico:tivo descritta dal modello matematico:
1.02.04.01.21.02.04.01.2
⎟⎠⎞
⎜⎝⎛ ⋅τ+⋅=
ttetektm Dp d
d )()()( ⎟
⎠⎞
⎜⎝⎛ ⋅τ+⋅=
ttetektm Dp d
d )()()( ( ) )()( sEs1ksM Dp ⋅⋅τ+⋅= ( ) )()( sEs1ksM Dp ⋅⋅τ+⋅=
Nel controllo PD la risposta a gradino è rappresentabile nel segNel controllo PD la risposta a gradino è rappresentabile nel seguente uente modo:modo: ee
tt tt
mm
11kkaa
ττDD
da cui si vede come da cui si vede come ττDD rapprerappre--senti il tempo necessario all’asenti il tempo necessario all’a--zione proporzionale per eguazione proporzionale per egua--gliare l’uscita derivativagliare l’uscita derivativa ( ) DptpD ektekm
Dτ⋅⋅=⋅⋅=
τ=( ) DptpD ektekm
Dτ⋅⋅=⋅⋅=
τ=

A.A. 2003/2004A.A. 2003/2004 dia dia 3939/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Limiti del controllo PDLimiti del controllo PD
L’azione derivativa non è utilizzabile da sola, in quanto:L’azione derivativa non è utilizzabile da sola, in quanto:Ha uno zero nell’origine che introduce un anticipo di 90° nella Ha uno zero nell’origine che introduce un anticipo di 90° nella FdT d’anelloFdT d’anelloDeriva anche componenti dei segnali a frequenze elevate e affettDeriva anche componenti dei segnali a frequenze elevate e affette da rue da ru--more, causando usura precoce degli attuatori e inconvenienti al more, causando usura precoce degli attuatori e inconvenienti al processoprocesso
Quest’ultimo motivo induce spesso ad associare l’azione derivatiQuest’ultimo motivo induce spesso ad associare l’azione derivativa a un va a un filtro di prim’ordine con FdTfiltro di prim’ordine con FdT
1.02.04.01.31.02.04.01.3
sN
1
ssF
D
D
⋅τ
+
⋅τ=)(
sN
1
ssF
D
D
⋅τ
+
⋅τ=)( con N con N ≅≅ 55÷÷1010

A.A. 2003/2004A.A. 2003/2004 dia dia 4040/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo PIDControllo PID
Il controllo PID è una combinazione dei controlli proporzionale,Il controllo PID è una combinazione dei controlli proporzionale, integrale integrale e derivativo, descritta dal modello matematico:e derivativo, descritta dal modello matematico:
1.02.05.01.11.02.05.01.1
)()( sEss
11ksM DI
p ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅τ+
⋅τ+⋅= )()( sEs
s11ksM DI
p ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅τ+
⋅τ+⋅=
o anche, col filtro sulla derivata:o anche, col filtro sulla derivata: )()( sEs
N1
ss
11ksMD
D
Ip ⋅
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅τ
+
⋅τ+
⋅τ+⋅= )()( sE
sN
1
ss
11ksMD
D
Ip ⋅
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅τ
+
⋅τ+
⋅τ+⋅=
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅τ+⋅⋅
τ+⋅= ∫ dt
tddttt )()()()(
ete1ekm DtIp ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅τ+⋅⋅
τ+⋅= ∫ dt
tddttt )()()()(
ete1ekm DtIp

A.A. 2003/2004A.A. 2003/2004 dia dia 4141/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo digitaleControllo digitale
Il controllo PID digitale è descritto dal modello matematico:Il controllo PID digitale è descritto dal modello matematico:
1.02.06.01.11.02.06.01.1
( )⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅
τ+⋅
τ+⋅= −
=∑ 1kk
Dk
0ii
Ikpk ee
TeTekm ( )⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅
τ+⋅
τ+⋅= −
=∑ 1kk
Dk
0ii
Ikpk ee
TeTekm
( ))()( zE
TNz
1z
NT1z
TekzM
D
DD
D
Ikp ⋅
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
τ+⋅τ
−
−⋅τ
+
τ+
−⋅τ+⋅= ( )
)()( zE
TNz
1z
NT1z
TekzM
D
DD
D
Ikp ⋅
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
τ+⋅τ
−
−⋅τ
+
τ+
−⋅τ+⋅= dove N = 3dove N = 3÷÷10 è un peso10 è un peso
derivato dal modello continuo corrispondentederivato dal modello continuo corrispondente

A.A. 2003/2004A.A. 2003/2004 dia dia 4242/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo Controllo FuzzyFuzzy
La logica La logica FuzzyFuzzy può essere considerata una forma di “può essere considerata una forma di “analogizzazioneanalogizzazione” ” della logica binariadella logica binariaInfatti:Infatti:
La logica binaria opera una scelta fra due stati reciprocamente La logica binaria opera una scelta fra due stati reciprocamente incompatibiincompatibi--liliLa logica La logica FuzzyFuzzy opera una scelta sfumata fra due stati opposti complemenopera una scelta sfumata fra due stati opposti complemen--taritari
La logica La logica FuzzyFuzzy è quindi una generalizzazione della logica binariaè quindi una generalizzazione della logica binaria
1.02.07.01.11.02.07.01.1

A.A. 2003/2004A.A. 2003/2004 dia dia 4343/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempio di logica Esempio di logica FuzzyFuzzy
Processo “LAMPADINA”Processo “LAMPADINA”Nella logica binaria una lampadina è accesa (stato 1) oppure speNella logica binaria una lampadina è accesa (stato 1) oppure spenta (stato nta (stato 0), senza alcuna possibilità di esistenza di uno stato intermedi0), senza alcuna possibilità di esistenza di uno stato intermediooNella logica Nella logica FuzzyFuzzy la lampadina può rientrare contemporaneamente nell’inla lampadina può rientrare contemporaneamente nell’in--sieme “lampadina accesa” e nell’insieme “lampadina spenta”sieme “lampadina accesa” e nell’insieme “lampadina spenta”
Infatti: se alimentata tramite un variatore di tensione la lampaInfatti: se alimentata tramite un variatore di tensione la lampadina potrebbe dina potrebbe essere accesa all’essere accesa all’x%x% e spenta all’e spenta all’y%y% (con x+y=100), cioè avere un (con x+y=100), cioè avere un grado di grado di appartenenzaappartenenza x% all’insieme “lampadina accesa” e y% all’insieme “lampadina x% all’insieme “lampadina accesa” e y% all’insieme “lampadina spenta”, come evidenzia la figuraspenta”, come evidenzia la figura
0%0%
100%100%
100%100%
0%0%0% Intensità luminosa 100%0% Intensità luminosa 100%
stato lampadinastato lampadina
30% spenta30% spenta
70% accesa70% accesa
1.02.07.01.21.02.07.01.2

A.A. 2003/2004A.A. 2003/2004 dia dia 4444/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Definizioni Definizioni FuzzyFuzzy
La logica La logica fuzzyfuzzy correla una correla una variabile variabile crispcrisp (fisica, misurabile), cui può (fisica, misurabile), cui può essere associato un essere associato un valore valore crispcrisp (numerico), a una (numerico), a una variabile variabile fuzzyfuzzy (lin(lin--guistica) caratterizzata da un guistica) caratterizzata da un valore valore fuzzyfuzzy (linguistico: alto, medio, bas(linguistico: alto, medio, bas--so), tramite una so), tramite una funzione di appartenenzafunzione di appartenenza normalmente espressa in fornormalmente espressa in for--ma graficama graficaI passaggi diretto (I passaggi diretto (per applicare la logica di controlloper applicare la logica di controllo) e inverso () e inverso (per apper ap--plicare un segnale di controlloplicare un segnale di controllo) fra un valore ) fra un valore crispcrisp e un valore e un valore fuzzyfuzzy, de, de--terminati dalla funzione di appartenenza terminati dalla funzione di appartenenza fuzzyfuzzy, sono detti rispettivamen, sono detti rispettivamen--te te fuzzificazionefuzzificazione e e defuzzificazionedefuzzificazioneLa correlazione fra le variabili La correlazione fra le variabili fuzzyfuzzy in ingresso e in uscita, detta in ingresso e in uscita, detta regola regola fuzzyfuzzy (che può essere singola o multipla) è espressa mediante un con(che può essere singola o multipla) è espressa mediante un con--cetto di natura sperimentale del tipo “cetto di natura sperimentale del tipo “se …, allorase …, allora ……””
1.02.07.02.11.02.07.02.1

A.A. 2003/2004A.A. 2003/2004 dia dia 4545/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempi di variabili e istruzioni Esempi di variabili e istruzioni fuzzyfuzzy
Esempi di variabili Esempi di variabili fuzzyfuzzy::La temperatura è elevata (alta)La temperatura è elevata (alta)L’umidità è sopportabileL’umidità è sopportabileLa velocità è altaLa velocità è altaLa pioggia è leggeraLa pioggia è leggera
Esempi di istruzioni Esempi di istruzioni fuzzyfuzzy::Chiudi un po’ la portaChiudi un po’ la portaApri di più il rubinettoApri di più il rubinettoDiminuisci la pressione sull’acceleratoreDiminuisci la pressione sull’acceleratoreOrienta meglio l’ombrelloOrienta meglio l’ombrello
1.02.07.02.21.02.07.02.2

A.A. 2003/2004A.A. 2003/2004 dia dia 4646/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempio: funzione di appartenenza Esempio: funzione di appartenenza fuzzyfuzzy
Si vuole tracciare la funzione d’appartenenza Si vuole tracciare la funzione d’appartenenza fuzzyfuzzy dell’acqua calda sadell’acqua calda sa--nitaria prodotta in un bollitore con le seguenti condizioni:nitaria prodotta in un bollitore con le seguenti condizioni:
Intervallo di temperatureIntervallo di temperature 1010÷÷80 C80 CAcqua caldaAcqua calda θθ > 60 C> 60 CAcqua tiepidaAcqua tiepida θθ = 40= 40÷÷50 C50 CAcqua freddaAcqua fredda θθ < 30 C< 30 C
1.02.07.02.31.02.07.02.3
10 30 40 50 60 10 30 40 50 60 CC 80 80 9090
100%100%
0%0%
Funzione di appartenenzaFunzione di appartenenza
La retta a 57 C interseca La retta a 57 C interseca gli insiemi gli insiemi fuzzyfuzzy tiepido e tiepido e caldo con i gradi d’apparcaldo con i gradi d’appar--tenenza rispettivi:tenenza rispettivi:
%)30(3,050605760: =
−−A %)30(3,0
50605760: =
−−A
%)70(7,050605057: =
−−B %)70(7,0
50605057: =
−−B
AA
BB

A.A. 2003/2004A.A. 2003/2004 dia dia 4747/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempio: Combinazione delle azioni PEsempio: Combinazione delle azioni P--II--DD
Si immagini di incaricare tre fuochisti di regolare la pressioneSi immagini di incaricare tre fuochisti di regolare la pressione di un gedi un ge--neratore di vapore, sulla base della lettura del manometro, agenneratore di vapore, sulla base della lettura del manometro, agendo sulla do sulla valvola del combustibilevalvola del combustibile
1.02.08.01.11.02.08.01.1
I tre fuochisti hanno la mentalità delle azioni di I tre fuochisti hanno la mentalità delle azioni di controllo P, I e D, quindi li chiameremo P, I e Dcontrollo P, I e D, quindi li chiameremo P, I e DSi supponga che il generatore sia condotto alterSi supponga che il generatore sia condotto alter--nativamente da uno solo dei tre fuochisti o da nativamente da uno solo dei tre fuochisti o da due fuochisti assieme (ma non I e D), o da tutti due fuochisti assieme (ma non I e D), o da tutti e tre contemporaneamentee tre contemporaneamenteA tal fine l’alimentazione del combustibile al generatore ha treA tal fine l’alimentazione del combustibile al generatore ha tre valvole valvole in parallelo che saranno chiuse in mancanza di un fuochista prepin parallelo che saranno chiuse in mancanza di un fuochista preposto al osto al loro controlloloro controlloIl generatore è soggetto ad una variazione di assorbimento a graIl generatore è soggetto ad una variazione di assorbimento a gradinodino
P

A.A. 2003/2004A.A. 2003/2004 dia dia 4848/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Fuochista Fuochista PP
Il fuochista Il fuochista PP è un calcolatore, e sperimenta che per soddisfare la richieè un calcolatore, e sperimenta che per soddisfare la richie--sta di vapore che provoca una caduta di pressione di 10 kPa occosta di vapore che provoca una caduta di pressione di 10 kPa occorre rre aprire la valvola di 5 giri di volantino, anche se la pressione aprire la valvola di 5 giri di volantino, anche se la pressione non riasnon rias--sume esattamente il valore precedente, perché sa che quando il csume esattamente il valore precedente, perché sa che quando il carico arico riassumerà il valore di progetto anche il manometro tornerà al vriassumerà il valore di progetto anche il manometro tornerà al valore alore previstoprevisto
1.02.08.01.21.02.08.01.2

A.A. 2003/2004A.A. 2003/2004 dia dia 4949/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Fuochista Fuochista II
Il fuochista Il fuochista II è un empirico, e quando vede che la richiesta di vapore è un empirico, e quando vede che la richiesta di vapore provoca una caduta di pressione di 10 kPa apre lentamente e regoprovoca una caduta di pressione di 10 kPa apre lentamente e regolarlar--mente la valvola provocando prima un rallentamento della caduta mente la valvola provocando prima un rallentamento della caduta di di pressione e poi la sua risalitapressione e poi la sua risalitaEgli però continua ad aprire la valvola, benché più lentamente, Egli però continua ad aprire la valvola, benché più lentamente, sino a sino a quando la pressione ha raggiunto nuovamente il valore prefissatoquando la pressione ha raggiunto nuovamente il valore prefissato, poi si , poi si ferma, ma il manometro continua a salire per inerzia del sistemaferma, ma il manometro continua a salire per inerzia del sistemaQuando la pressione sale di 10 kPa Quando la pressione sale di 10 kPa II comincia a chiudere, ma quando la comincia a chiudere, ma quando la pressione riassume il valore prefissato la valvola risulta tropppressione riassume il valore prefissato la valvola risulta troppo chiusao chiusaIl ciclo si ripete indefinitamente, con velocità d’azione del fuIl ciclo si ripete indefinitamente, con velocità d’azione del fuochista proochista pro--porzionale all’errore di pressione, e un risultato instabileporzionale all’errore di pressione, e un risultato instabile
1.02.08.01.31.02.08.01.3

A.A. 2003/2004A.A. 2003/2004 dia dia 5050/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Fuochista Fuochista DD
Il fuochista Il fuochista DD è un energico, che osserva la velocità di caduta della presè un energico, che osserva la velocità di caduta della pres--sione ed agisce immediatamente sulla valvola con una correzione sione ed agisce immediatamente sulla valvola con una correzione brubru--sca, per esempio 10 giri di volantinosca, per esempio 10 giri di volantinoLa pressione comincia a risalire con una certa velocità, e La pressione comincia a risalire con una certa velocità, e DD opera una opera una brusca chiusura in funzione della velocità di variazione della pbrusca chiusura in funzione della velocità di variazione della pressione, ressione, arrivando a un certo punto alla posizione di partenza della valvarrivando a un certo punto alla posizione di partenza della valvola ma ola ma con pressione diversa da quella prefissatacon pressione diversa da quella prefissataIl ciclo si ripete indefinitamente, con velocità d’azione del fuIl ciclo si ripete indefinitamente, con velocità d’azione del fuochista proochista pro--porzionale alla velocità di variazione della pressione, e un risporzionale alla velocità di variazione della pressione, e un risultato inultato in--stabilestabile
1.02.08.01.41.02.08.01.4

A.A. 2003/2004A.A. 2003/2004 dia dia 5151/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Fuochisti Fuochisti PP e e II
Ciascun fuochista opera secondo la sua mentalità: Ciascun fuochista opera secondo la sua mentalità: PP reagisce alla reagisce alla caduta di pressione di 10 kPa con una correzione di 5 giri di vocaduta di pressione di 10 kPa con una correzione di 5 giri di volantino lantino limitando la caduta di pressione, mentre limitando la caduta di pressione, mentre II continua metodicamente ad continua metodicamente ad agire sulla sua valvola, ma solo per correggere l’errore residuoagire sulla sua valvola, ma solo per correggere l’errore residuo all’aall’a--zione di zione di PP, quindi senza provocare instabilità grazie alla modestia delle , quindi senza provocare instabilità grazie alla modestia delle correzionicorrezioni
1.02.08.01.51.02.08.01.5

A.A. 2003/2004A.A. 2003/2004 dia dia 5252/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Fuochisti Fuochisti PP e e DD
Ciascun fuochista opera secondo la sua mentalità: Ciascun fuochista opera secondo la sua mentalità: PP reagisce alla cadureagisce alla cadu--ta di pressione di 10 kPa con una correzione di 5 giri di volantta di pressione di 10 kPa con una correzione di 5 giri di volantino limiino limi--tando la caduta di pressione, mentre tando la caduta di pressione, mentre DD opera una brusca correzione di opera una brusca correzione di 10 giri10 giriL’azione di L’azione di DD impedisce che la pressione si riduca ulteriormente, ma impedisce che la pressione si riduca ulteriormente, ma non risolve il problema dell’errore residuo lasciato da non risolve il problema dell’errore residuo lasciato da PP, in quanto , in quanto DDricomincia ad agire chiudendo la valvola in funzione della sola ricomincia ad agire chiudendo la valvola in funzione della sola velocità di velocità di variazione della pressione, non della posizione della lancetta dvariazione della pressione, non della posizione della lancetta del manoel mano--metrometroL’intervento combinato di L’intervento combinato di PP e D è quindi di anch’esso instabilee D è quindi di anch’esso instabile
1.02.08.01.61.02.08.01.6

A.A. 2003/2004A.A. 2003/2004 dia dia 5353/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Fuochisti Fuochisti PP , , II e e DD
Ciascun fuochista opera secondo la sua mentalità: Ciascun fuochista opera secondo la sua mentalità: DD opera una brusca opera una brusca correzione di 10 giri bloccando la caduta di pressione di 10 kPacorrezione di 10 giri bloccando la caduta di pressione di 10 kPa mentre mentre PP reagisce alla caduta di pressione con una correzione di 5 giri reagisce alla caduta di pressione con una correzione di 5 giri di vodi vo--lantino, e lantino, e II apre lentamente fino ad annullare lo scostamento residuo laapre lentamente fino ad annullare lo scostamento residuo la--sciato da sciato da PPL’intervento combinato dei tre fuochisti impedisce una caduta diL’intervento combinato dei tre fuochisti impedisce una caduta di prespres--sione elevata (sione elevata (DD), riduce il disturbo provocato dalla variazione brusca ), riduce il disturbo provocato dalla variazione brusca del carico (del carico (PP) ed elimina l’errore residuo () ed elimina l’errore residuo (II))
1.02.08.01.71.02.08.01.7

A.A. 2003/2004A.A. 2003/2004 dia dia 5454/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo PID standard (commerciale)Controllo PID standard (commerciale)
I controllori PID commerciali rispettano solitamente il modello I controllori PID commerciali rispettano solitamente il modello standard standard ISA:ISA:
1.02.09.01.11.02.09.01.1
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−⋅⋅⋅
τ+
⋅τ+⋅
⋅τ+−⋅⋅= )()()( yrc
sN
1
sE
s1yrbksM
D
D
Ip
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−⋅⋅⋅
τ+
⋅τ+⋅
⋅τ+−⋅⋅= )()()( yrc
sN
1
sE
s1yrbksM
D
D
Ip con con b =b = 00÷÷11 e e c =c = 00÷÷11
che per b=c=1 coincide col modello “scolastico” dotato di filtroche per b=c=1 coincide col modello “scolastico” dotato di filtro
Processom
zy
M/Rr
M/Yy
In genere i controllori PID sono a In genere i controllori PID sono a 2 vie per elaborare separatamen2 vie per elaborare separatamen--te sette set--point e misura, quindi agpoint e misura, quindi ag--giustare separatamente le rispogiustare separatamente le rispo--ste al setste al set--point (point (bb e e cc) e al di) e al di--sturbo di carico (sturbo di carico (kkpp, , ττII, e , e ττDD):):

A.A. 2003/2004A.A. 2003/2004 dia dia 5555/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Segnale di controllo standardSegnale di controllo standard
I controllori commerciali sono predisposti per uscite di tipo:I controllori commerciali sono predisposti per uscite di tipo:Analogico con caratteristiche elettriche standard:Analogico con caratteristiche elettriche standard:
00 ÷÷ 1010 V V cccc00 ÷÷ 2020 mAmA44 ÷÷ 2020 mAmA
Analogico con caratteristiche di pressione standard Analogico con caratteristiche di pressione standard 2020 ÷÷100100 kPakPa (3(3÷÷15 15 psipsi))
Logico a relé, (Logico a relé, (a tempo proporzionalea tempo proporzionale))
1.02.09.02.11.02.09.02.1
LandisLandis & & GyrGyr 00÷÷10 V 10 V ccccStæfaStæfa 00÷÷20 V cc20 V ccSiemensSiemensCazzaniga TACazzaniga TA 22÷÷10 V cc 10 V cc SauterSauter 22÷÷10 V cc 10 V cc ControlliControlli 33÷÷12 V cc12 V ccSatchwellSatchwellInvensysInvensys 00÷÷10 V 10 V cccc

A.A. 2003/2004A.A. 2003/2004 dia dia 5656/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
kk K+1K+1 K+2K+2
Controllo a tempo proporzionaleControllo a tempo proporzionale
Il controllore a tempo proporzionale utilizza il segnale di contIl controllore a tempo proporzionale utilizza il segnale di controllo contirollo conti--nuo elaborato da un controllore PID per modulare la durata deglinuo elaborato da un controllore PID per modulare la durata degli interinter--valli temporali in cui il segnale di controllo applicato è on opvalli temporali in cui il segnale di controllo applicato è on oppure off in pure off in un circuito un circuito PWMPWM ((PulsePulse WidthWidth ModulatorModulator) che, in ogni ciclo di un tem) che, in ogni ciclo di un tem--porizzatore, mantiene l’uscita porizzatore, mantiene l’uscita mm in on per un tempo in on per un tempo ddkk proporzionale proporzionale alal--l’l’ingresso ingresso m’m’ espresso da:espresso da:
1.02.09.03.11.02.09.03.1
mz ePID PWM
m'
y
Processo
zy
min
min
''''
mmmm
Td
Max
kk
−−
=min
min
''''
mmmm
Td
Max
kk
−−
=
'' mmTd
m Maxk ≡⋅= '' mm
Td
m Maxk ≡⋅= col valor medio:col valor medio:
mm
ttK+3K+3
mmMaxMax
TT
Il controllo a tempo proporzionale può esIl controllo a tempo proporzionale può es--sere conveniente per il minor costo degli sere conveniente per il minor costo degli attuatori onattuatori on--off rispetto a quelli analogicioff rispetto a quelli analogici

A.A. 2003/2004A.A. 2003/2004 dia dia 5757/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllo di posizione d’un servomotoreControllo di posizione d’un servomotore
Se l’attuatore è un servomotore in grado di ruotare nei due sensSe l’attuatore è un servomotore in grado di ruotare nei due sensi a vei a ve--locità costante il segnale di controllo può essere a tre livellilocità costante il segnale di controllo può essere a tre livelli::
rotazione indietrorotazione indietrofermofermorotazione in avantirotazione in avanti
1.02.09.04.11.02.09.04.1
Il controllo può essere effettuato con Il controllo può essere effettuato con un relé a tre stati dotato di:un relé a tre stati dotato di:
isteresi con differenziale sufficienteisteresi con differenziale sufficiente--mente ampio nelle due transizionimente ampio nelle due transizionizona morta sufficientemente ampia da zona morta sufficientemente ampia da evitare generazione di cicli limite evitare generazione di cicli limite nelnel--l’l’intorno di e=0intorno di e=0
mz eP
m'
y
s-1
y
A.A. 2003/2004A.A. 2003/2004 dia dia 5858/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sintonizzazione del controlloreSintonizzazione del controllore
La sintonizzazione dei parametri del controllore (La sintonizzazione dei parametri del controllore (tuningtuning) è un’operazio) è un’operazio--ne certamente necessaria in un impianto nuovo, ma anche in altrene certamente necessaria in un impianto nuovo, ma anche in altre situasitua--zioni, che può essere effettuata in differenti modi in funzione zioni, che può essere effettuata in differenti modi in funzione delle sedelle se--guenti caratteristiche:guenti caratteristiche:
Il modello matematico del processo è notoIl modello matematico del processo è notoIl modello matematico del processo è ignoto ma il processo è ideIl modello matematico del processo è ignoto ma il processo è identificabilentificabileIl processo è ignoto e non identificabileIl processo è ignoto e non identificabile
Nei primi due casi si può sintonizzare il controllore in base alNei primi due casi si può sintonizzare il controllore in base alle specifile specifi--che nei domini del tempo (errore a regime, tempi caratteristici,che nei domini del tempo (errore a regime, tempi caratteristici, etc.) o etc.) o della frequenza (margini di stabilità, etc.)della frequenza (margini di stabilità, etc.)Nel terzo caso si deve ricorrere alla determinazione sperimentalNel terzo caso si deve ricorrere alla determinazione sperimentale delle e delle impostazioni del controlloreimpostazioni del controllore
1.02.09.05.11.02.09.05.1

A.A. 2003/2004A.A. 2003/2004 dia dia 5959/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sintonizzazione sperimentaleSintonizzazione sperimentale
La sintonizzazione sperimentale delle impostazioni del controlloLa sintonizzazione sperimentale delle impostazioni del controllore può re può essere fatta con uno dei seguenti metodi:essere fatta con uno dei seguenti metodi:
1° metodo di 1° metodo di ZieglerZiegler--NicholsNichols2° metodo di 2° metodo di ZieglerZiegler--NicholsNicholsMetodo del ciclo continuoMetodo del ciclo continuoMetodo della curva di reazioneMetodo della curva di reazioneMetodo della commutazione di funzionamento manualeMetodo della commutazione di funzionamento manuale--automaticoautomatico
1.02.09.05.21.02.09.05.2
A.A. 2003/2004A.A. 2003/2004 dia dia 6060/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Metodo del ciclo continuoMetodo del ciclo continuo
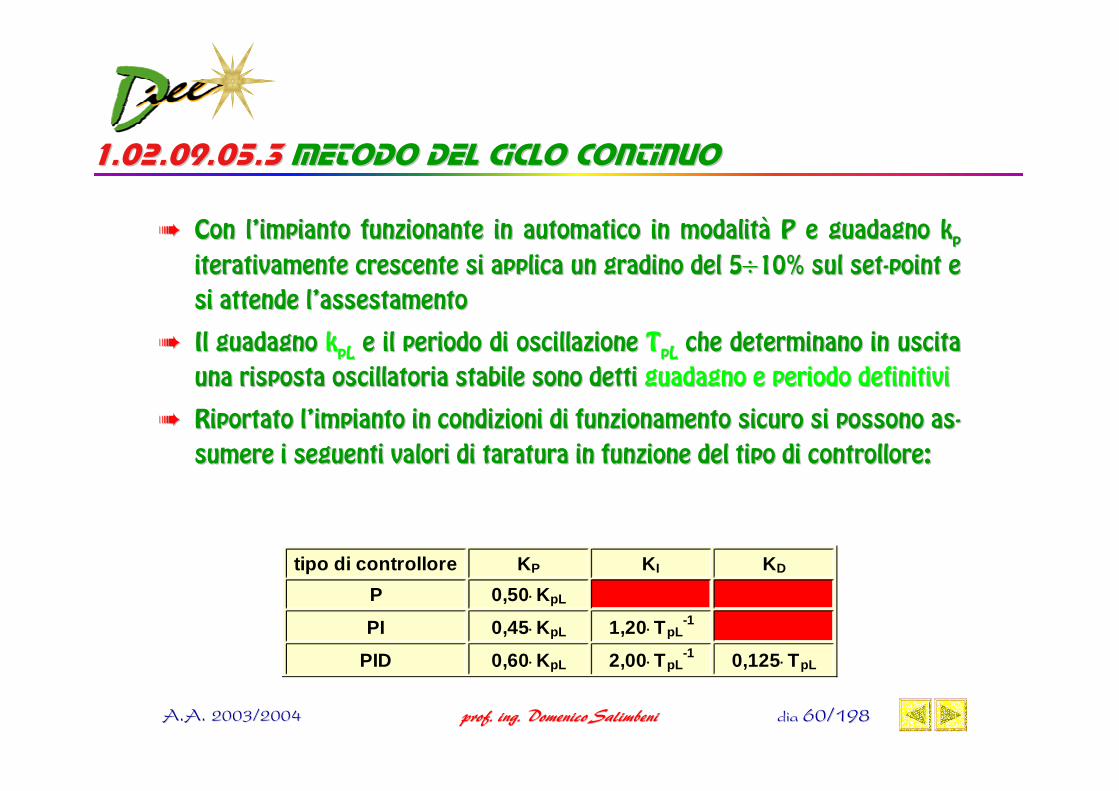
Con l’impianto funzionante in automatico in modalità P e guadagnCon l’impianto funzionante in automatico in modalità P e guadagno o kkppiterativamente crescente si applica un gradino del 5iterativamente crescente si applica un gradino del 5÷÷10% sul set10% sul set--point epoint esi attende l’assestamentosi attende l’assestamentoIl guadagno Il guadagno kkpLpL e il periodo di oscillazione e il periodo di oscillazione TTpLpL che determinano in uscita che determinano in uscita una risposta oscillatoria stabile sono detti una risposta oscillatoria stabile sono detti guadagno e periodo definitiviguadagno e periodo definitiviRiportato l’impianto in condizioni di funzionamento sicuro si poRiportato l’impianto in condizioni di funzionamento sicuro si possono asssono as--sumere i seguenti valori di taratura in funzione del tipo di consumere i seguenti valori di taratura in funzione del tipo di controllore:trollore:
1.02.09.05.31.02.09.05.3
tipo di controllore KP KI KD
P 0,50⋅KpL
PI 0,45⋅KpL 1,20⋅TpL-1
PID 0,60⋅KpL 2,00⋅TpL-1 0,125⋅TpL

A.A. 2003/2004A.A. 2003/2004 dia dia 6161/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Metodo della curva di reazioneMetodo della curva di reazione
Con l’impianto portato a regime in cateCon l’impianto portato a regime in cate--na aperta e guadagno proporzionale k na aperta e guadagno proporzionale k selezionato manualmente a circa il 50% selezionato manualmente a circa il 50% del fondo scala si applica un gradino del del fondo scala si applica un gradino del 55÷÷10% sul set10% sul set--point epoint e si registra l’uscisi registra l’usci--ta del trasduttore in retroazioneta del trasduttore in retroazione
1.02.09.05.41.02.09.05.4
yy
tt
100,0%100,0%
63,2%63,2%
TTMM TTSS
TT63%63%Si ha così:Si ha così:
Costante di tempo del processo:Costante di tempo del processo:Modello matematico del processo:Modello matematico del processo:
tipo di controllore KP KI KD
P (τ⋅K)⋅TD
PI (τ⋅K)⋅TD 0,3⋅TD-1
PID 1,25⋅ (τ⋅K)⋅TD 0,4⋅TD-1 0,4⋅TD
M63 TT −=τ % M63 TT −=τ %
s1eksG
sTM
⋅τ+⋅
=⋅−
)(s1
eksGsTM
⋅τ+⋅
=⋅−
)(

A.A. 2003/2004A.A. 2003/2004 dia dia 6262/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Metodo della commutazione MMetodo della commutazione M--AA1.02.09.05.51.02.09.05.5
Ambienter m te
t
M
C(z)
T
mHIl metodo della commutazione MIl metodo della commutazione M--A A si sviluppa nei seguenti passi:si sviluppa nei seguenti passi:1)1) Selezione manuale del segnale Selezione manuale del segnale mmHH
che porta a regime l’impianto deche porta a regime l’impianto de--terminando un errore nullo nella terminando un errore nullo nella catena di retroazione catena di retroazione
2)2) Individuazione dei guadagni kIndividuazione dei guadagni kPP, k, kII e e kkDD del regolatore commerciale PID del regolatore commerciale PID che fanno coincidere la risposta m che fanno coincidere la risposta m col segnale mcol segnale mHH
3)3) Commutazione MCommutazione M--A che, in coinciA che, in coinci--denza di un errore nullo, non prodenza di un errore nullo, non pro--voca voca pendolazionipendolazioni
A.A. 2003/2004A.A. 2003/2004 dia dia 6363/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
CompensazioniCompensazioni
Nella descrizione delle caratteristiche dei controllori (regolatNella descrizione delle caratteristiche dei controllori (regolatori) si è ori) si è fatto riferimento sempre al valore di riferimento, o fatto riferimento sempre al valore di riferimento, o setset--pointpoint, dando per , dando per scontato che questo sia determinato tramite un cursore ad azionescontato che questo sia determinato tramite un cursore ad azione mama--nualenualeTalvolta, però, il Talvolta, però, il setset--pointpoint è determinato in funzione del valore di una è determinato in funzione del valore di una variabile compensatricevariabile compensatrice, che determina una compensazione:, che determina una compensazione:
DirettaDiretta, o estiva, se il set, o estiva, se il set--point varia nella medesima direzione della granpoint varia nella medesima direzione della gran--dezza compensatricedezza compensatriceInversaInversa, o invernale, se il set, o invernale, se il set--point varia nella direzione opposta a quella point varia nella direzione opposta a quella della grandezza compensatricedella grandezza compensatrice
Esempio: all’aumento della temperatura esterna viene ridotta la Esempio: all’aumento della temperatura esterna viene ridotta la temperatura temperatura del fluido del fluido termovettoretermovettore come nella regolazione determinata dalle specifiche sul come nella regolazione determinata dalle specifiche sul risparmio energetico (legge n. 10/91)risparmio energetico (legge n. 10/91)
1.02.09.06.11.02.09.06.1

A.A. 2003/2004A.A. 2003/2004 dia dia 6464/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Autorità della compensazioneAutorità della compensazione
L’influenza che il segnale di compensazione (applicato da un regL’influenza che il segnale di compensazione (applicato da un regolatore olatore master) esercita sul regolatore periferico è detta master) esercita sul regolatore periferico è detta autoritàautorità, ed è espres, ed è espres--sa dalla relazione:sa dalla relazione:
1.02.09.06.21.02.09.06.2
1001
2
2
1 ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
∆∆
=CCA 100
1
2
2
1 ⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅
∆∆
=CCA
∆∆ == variazione desiderata della grandezza regolata (1) o compensatrivariazione desiderata della grandezza regolata (1) o compensatrice (2)ce (2)
CC == campo del regolatore periferico (1) o master (2)campo del regolatore periferico (1) o master (2)
EsempioEsempio:: Si vuole compensare la temperatura di mandata dell’acqua calda Si vuole compensare la temperatura di mandata dell’acqua calda in base a quella esterna, variandola nel campo 85in base a quella esterna, variandola nel campo 85÷÷20 C quando 20 C quando allall’’esterno la temperatura varia nel campo 3esterno la temperatura varia nel campo 3÷÷20 C20 C
0102030405060708090
3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20temperatura esterna
tem
pera
tura
acq
ua m
anda
taIpotizzando uguali i campi dei due Ipotizzando uguali i campi dei due regolatorisiregolatorisi haha::
%38210011
3202085
≅⋅⎟⎠
⎞⎜⎝
⎛ ⋅−−
=A %38210011
3202085
≅⋅⎟⎠
⎞⎜⎝
⎛ ⋅−−
=A
In blu è evidenziata una curva reale:In blu è evidenziata una curva reale:

A.A. 2003/2004A.A. 2003/2004 dia dia 6565/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Controllori CommercialiControllori Commerciali
1)1) Sistema monoblocco (compatto)Sistema monoblocco (compatto)2)2) Sistema tradizionaleSistema tradizionale3)3) Sistema modulare a schedeSistema modulare a schede4)4) Sistema DDC (Sistema DDC (Direct Direct DigitalDigital ControlControl))5)5) Sistema DCS (Sistema DCS (DistribuitedDistribuited Control SystemControl System))6)6) Sistema SCADA (Sistema SCADA (Supervisori Control and Data Supervisori Control and Data AcquisitionAcquisition))
1.02.10.00.01.02.10.00.0

A.A. 2003/2004A.A. 2003/2004 dia dia 6666/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema monobloccoSistema monoblocco
Il sistema di controllo elettronico monoblocco (Il sistema di controllo elettronico monoblocco (CEMCEM), o ), o compatto è articolato secondo lo schema classico:compatto è articolato secondo lo schema classico:
sondasonda--controllorecontrollore--attuatoreattuatore
1.02.11.01.11.02.11.01.1
T
C
V
T
C
V
ma la scheda elettronica del controllore è inserita nel corpo dema la scheda elettronica del controllore è inserita nel corpo della sondalla sondaI sistemi di controllo monoblocco sono economici e semplici, ma I sistemi di controllo monoblocco sono economici e semplici, ma decendecen--trati, non flessibili, non sofisticati, e in genere limitati al trati, non flessibili, non sofisticati, e in genere limitati al controllo di controllo di temperatura e umidità relativatemperatura e umidità relativaSono inoltre difficilmente verificabiliSono inoltre difficilmente verificabili

A.A. 2003/2004A.A. 2003/2004 dia dia 6767/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempi applicativi di CEMEsempi applicativi di CEM
Condizionatore splitCondizionatore split--system con batteria system con batteria calda ad acqua:calda ad acqua:
Uscita modulante su valvola a tre vieUscita modulante su valvola a tre vieUscita onUscita on--off su compressoreoff su compressore
1.02.11.01.21.02.11.01.2
- +
Condizionatore centralizzato con due batCondizionatore centralizzato con due bat--terie ad acquaterie ad acqua
Uscita modulante su valvola a tre vie (Uscita modulante su valvola a tre vie (––))Uscita modulante su valvola a tre vie (+)Uscita modulante su valvola a tre vie (+)
+ +
Produttore di acqua calda sanitariaProduttore di acqua calda sanitariaUscita modulante su valvola a tre vie (Uscita modulante su valvola a tre vie (––))Uscita modulante su valvola a tre vie (+)Uscita modulante su valvola a tre vie (+)
T
C
R
F

A.A. 2003/2004A.A. 2003/2004 dia dia 6868/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Tipologie dei sistemi compattiTipologie dei sistemi compatti
A 2A 2÷÷3 posizioni elettromeccanici3 posizioni elettromeccaniciUn dispositivo a scatto rapido in deviazione determina il cambiaUn dispositivo a scatto rapido in deviazione determina il cambiamento di mento di stato del segnale di controllostato del segnale di controllo
A relé elettroniciA relé elettroniciUno o due relé determinano lo stato del segnale di controlloUno o due relé determinano lo stato del segnale di controllo
Proporzionali elettromeccanici (Proporzionali elettromeccanici (potenziometricipotenziometrici))Un didpositivo potenziometrico lineare (165 Un didpositivo potenziometrico lineare (165 ΩΩ) determina un segnale di ) determina un segnale di controllo 0controllo 0÷÷165 165 ΩΩ facilmente trasformabile in segnale di tensione o facilmente trasformabile in segnale di tensione o correntecorrente
Proporzionali elettronici (a due uscite SPST o Proporzionali elettronici (a due uscite SPST o TriacTriac))
1.02.11.01.31.02.11.01.3
A.A. 2003/2004A.A. 2003/2004 dia dia 6969/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema tradizionaleSistema tradizionale
Sistemi nei quali è facilmente riconoscibile la sequenza costituSistemi nei quali è facilmente riconoscibile la sequenza costituii--ta dai tre componenti base ta dai tre componenti base sondasonda--controllorecontrollore--attuatoreattuatore, frequen, frequen--temente con più sonde in ingressotemente con più sonde in ingresso
1.02.12.01.11.02.12.01.1
Si tratta in genere di sistemi elettronici o pneumatici, per monSi tratta in genere di sistemi elettronici o pneumatici, per montaggio in taggio in quadro o a muro, dedicati a una funzione particolare quali, per quadro o a muro, dedicati a una funzione particolare quali, per esempio:esempio:
Controllo di temperatura di mandata con compensazione esternaControllo di temperatura di mandata con compensazione esternaControllo di sequenzaControllo di sequenza……
T
C
V
T

A.A. 2003/2004A.A. 2003/2004 dia dia 7070/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempi applicativi del sistema tradizionaleEsempi applicativi del sistema tradizionale
Controllo “climatico” di un impianControllo “climatico” di un impian--to di riscaldamento degli ambienti:to di riscaldamento degli ambienti:
Il segnale di controllo dipende dal Il segnale di controllo dipende dal valore del segnale di temperatura valore del segnale di temperatura di mandata corretto in funzione di mandata corretto in funzione del segnale di misura della tempedel segnale di misura della tempe--ratura esterna, che svolge il ruolo ratura esterna, che svolge il ruolo di correttore del setdi correttore del set--pointpointLa pompa anticondensa ha il comLa pompa anticondensa ha il com--pito di mantenere sufficientemenpito di mantenere sufficientemen--te elevata la temperatura del fluite elevata la temperatura del flui--do do termovettoretermovettore di ritornodi ritorno
1.02.12.01.21.02.12.01.2
A.A. 2003/2004A.A. 2003/2004 dia dia 7171/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Tipologie dei sistemi tradizionaliTipologie dei sistemi tradizionali
A relé elettroniciA relé elettroniciUno o due relé determinano lo stato del segnale di controlloUno o due relé determinano lo stato del segnale di controlloDue relé determinano lo stato del segnale di controllo a tempo pDue relé determinano lo stato del segnale di controllo a tempo proporzioroporzio--nalenale
PID (commutabile P in campo) elettronici (a due uscite SPST o PID (commutabile P in campo) elettronici (a due uscite SPST o TriacTriac))
1.02.12.01.31.02.12.01.3

A.A. 2003/2004A.A. 2003/2004 dia dia 7272/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema modulareSistema modulare
Frequentemente i processi termici sono troppo complessi per esFrequentemente i processi termici sono troppo complessi per es--sere controllati da un singolo anello di controllo costituito dasere controllati da un singolo anello di controllo costituito dai tre i tre componenti base componenti base sondasonda--controllorecontrollore--attuatoreattuatore
1.02.13.01.11.02.13.01.1
T
C
V
In questa situazione si deve ricorrere a più anelli di controlloIn questa situazione si deve ricorrere a più anelli di controllo in paralin paral--lelo, con controllori spesso connessi fra loro e con altri compolelo, con controllori spesso connessi fra loro e con altri componenti (nenti (sasa--turatorituratori, moltiplicatori, etc.), realizzando schemi di controllo comples, moltiplicatori, etc.), realizzando schemi di controllo complessi si e organizzati gerarchicamente, quindi e organizzati gerarchicamente, quindi sistemi modularisistemi modulari, nei quali peral, nei quali peral--tro la sequenza base richiamata sopra è sempre facilmente riconotro la sequenza base richiamata sopra è sempre facilmente riconoscibilescibileI controllori utilizzati sono modulari, a scheda elettronica, inI controllori utilizzati sono modulari, a scheda elettronica, in custodia custodia normalizzata con frontalino di comando da inserire in un unico qnormalizzata con frontalino di comando da inserire in un unico quadro uadro elettrico di controllo o in rack da 19”elettrico di controllo o in rack da 19”

A.A. 2003/2004A.A. 2003/2004 dia dia 7373/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Segnali di controllo multipliSegnali di controllo multipli
Nei sistemi di controllo modulari è frequente l’applicazione di Nei sistemi di controllo modulari è frequente l’applicazione di più segnali più segnali di controllo ad un unico attuatore: è tipico il caso di un procedi controllo ad un unico attuatore: è tipico il caso di un processo di rafsso di raf--freddamento e deumidificazione, che utilizza un’unica valvola mifreddamento e deumidificazione, che utilizza un’unica valvola miscelatriscelatri--ce motorizzata per il controllo delle due grandezze fisichece motorizzata per il controllo delle due grandezze fisiche
1.02.13.01.21.02.13.01.2
I due segnali di controllo possono essere applicati al medesimo I due segnali di controllo possono essere applicati al medesimo morsetmorset--to dell’attuatore in uno dei seguenti modi:to dell’attuatore in uno dei seguenti modi:
T T
V
CC
T T
V
CC
T T
V
CC
Controllori dotati di diodo di protezioControllori dotati di diodo di protezio--ne:ne:
DirettamenteDirettamenteControllori non dotati di diodo di proControllori non dotati di diodo di pro--tezione:tezione:
Tramite selettore di segnaliTramite selettore di segnaliTramite due diodi di protezioneTramite due diodi di protezione

A.A. 2003/2004A.A. 2003/2004 dia dia 7474/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Tipologie dei sistemi modulariTipologie dei sistemi modulari
A relé elettroniciA relé elettroniciUno o due relé determinano lo stato del segnale di controlloUno o due relé determinano lo stato del segnale di controlloDue relé determinano lo stato del segnale di controllo a tempo pDue relé determinano lo stato del segnale di controllo a tempo proporzioroporzio--nalenale
PID (commutabile P in campo) elettronici a variazione di tensionPID (commutabile P in campo) elettronici a variazione di tensione con e con azione diretta o inversa e relé ausiliari, o a relé con più usciazione diretta o inversa e relé ausiliari, o a relé con più uscite SPST o te SPST o TriacTriac
1.02.13.01.31.02.13.01.3
I controllori modulari sono generalmente in grado di comandare aI controllori modulari sono generalmente in grado di comandare attuatottuato--ri pneumatici tramite convertitori E/Pri pneumatici tramite convertitori E/P

A.A. 2003/2004A.A. 2003/2004 dia dia 7575/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema DDCSistema DDC
La diffusione dell’elettronica digitale e di sistemi di elaborazLa diffusione dell’elettronica digitale e di sistemi di elaborazione econoione econo--mici, nonché la flessibilità ed efficacia dei segnali digitali, mici, nonché la flessibilità ed efficacia dei segnali digitali, trasmittibilitrasmittibili a a distanze rilevanti, hanno favorito la diffusione del controllo ddistanze rilevanti, hanno favorito la diffusione del controllo digitale asigitale as--servito direttamente a un sistema a servito direttamente a un sistema a µµP: i sistemi P: i sistemi DDCDDC (Direct (Direct DigitalDigitalControl)Control)
1.02.14.01.11.02.14.01.1
I controllori DDC sfruttano l’elevata potenzialità di calcolo deI controllori DDC sfruttano l’elevata potenzialità di calcolo del l µµP, quindi P, quindi forniscono prestazioni che esulano dal consueto campo d’forniscono prestazioni che esulano dal consueto campo d’pplicazionepplicazione dei dei controllori PID: ottimizzazione energetica, display, limiti di mcontrollori PID: ottimizzazione energetica, display, limiti di massima e assima e minima, programmazione temporale, allarmi, possibilità d’minima, programmazione temporale, allarmi, possibilità d’interconesintercones--sionesione con altri controllori DDC o con un sistema di supervisione, etccon altri controllori DDC o con un sistema di supervisione, etc..

A.A. 2003/2004A.A. 2003/2004 dia dia 7676/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Articolazione di un sistema DDCArticolazione di un sistema DDC
Articolazione di un sistema DDCArticolazione di un sistema DDC
rr ++
DADA__
Unità di controllo digitaleUnità di controllo digitale
mm
attuatoriattuatori
ADAD
sensorisensori
1.02.14.01.21.02.14.01.2

A.A. 2003/2004A.A. 2003/2004 dia dia 7777/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Algoritmo PID nel PCAlgoritmo PID nel PC
L’algoritmo PID utilizzato in un elaboratore numerico è leggermeL’algoritmo PID utilizzato in un elaboratore numerico è leggermente difnte dif--ferente da quello già studiato:ferente da quello già studiato:
1.02.14.01.31.02.14.01.3
infatti, per evitare risposte brusche di infatti, per evitare risposte brusche di mmkk a un a un ∆∆r, si utilizza la relazior, si utilizza la relazio--ne:ne:
⎟⎟⎠
⎞⎜⎜⎝
⎛
∆−
⋅τ+⋅τ∆
+⋅= −
=∑ t
yyetekm 1kk
D
k
0ii
Ikk ⎟
⎟⎠
⎞⎜⎜⎝
⎛
∆−
⋅τ+⋅τ∆
+⋅= −
=∑ t
yyetekm 1kk
D
k
0ii
Ikk
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅τ+⋅⋅
τ+⋅= ∫ dt
tddttt )()()()(
ete1ekm DtIp ⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅τ+⋅⋅
τ+⋅= ∫ dt
tddttt )()()()(
ete1ekm DtIp
dopo la conversione, che con un convertitore a 12 bit, trasformadopo la conversione, che con un convertitore a 12 bit, trasforma il seil se--gnale 4gnale 4÷÷20 mA in un numero nel campo 020 mA in un numero nel campo 0÷÷4095 (24095 (21212––1)1)

A.A. 2003/2004A.A. 2003/2004 dia dia 7878/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Integrazione dei sistemi DDCIntegrazione dei sistemi DDC
I sistemi di controllo DDC sono sistemi inI sistemi di controllo DDC sono sistemi in--tegrati nei quali il controllore DDC riceve tegrati nei quali il controllore DDC riceve tutti i segnali di misura e applica tutti i setutti i segnali di misura e applica tutti i se--gnali di controllo del singolo processognali di controllo del singolo processo
1.02.14.01.41.02.14.01.4
T T T T
DDC
VV V
I controllori DDC possono essere interconnessi fra loro, tramiteI controllori DDC possono essere interconnessi fra loro, tramite busbus o o modem, per realizzare un controllo di processo più ampio con scamodem, per realizzare un controllo di processo più ampio con scambio di mbio di informazioni e setinformazioni e set--pointpointUno di loro ha funzioni di master, gli altri slaveUno di loro ha funzioni di master, gli altri slaveI controllori DDC, totalmente autonomi, possono essere collegatiI controllori DDC, totalmente autonomi, possono essere collegati a un sia un si--stema di supervisionestema di supervisione
T T T T
DDC
VV V

A.A. 2003/2004A.A. 2003/2004 dia dia 7979/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Esempio applicativo di un controllo DDCEsempio applicativo di un controllo DDC
Controllo “climatico” di un impianControllo “climatico” di un impian--to di riscaldamento degli ambienti:to di riscaldamento degli ambienti:
Il segnale di controllo dipende dal Il segnale di controllo dipende dal valore del segnale di temperatura valore del segnale di temperatura di mandata corretto in funzione di mandata corretto in funzione del segnale di misura della tempedel segnale di misura della tempe--ratura esterna, che svolge il ruolo ratura esterna, che svolge il ruolo di correttore del setdi correttore del set--pointpointLa pompa anticondensa ha il comLa pompa anticondensa ha il com--pito di mantenere sufficientemenpito di mantenere sufficientemen--te elevata la temperatura del fluite elevata la temperatura del flui--do do termovettoretermovettore di ritornodi ritorno
1.02.14.01.51.02.14.01.5
Il controllore DDC riceve i segnali Il controllore DDC riceve i segnali di tutte le sonde, li elabora in serie di tutte le sonde, li elabora in serie in ogni periodo di campionamento, in ogni periodo di campionamento, e applie appli--ca tutti i segnali di controlloca tutti i segnali di controlloIl sistema può effettuare un’ottiIl sistema può effettuare un’otti--mizzazione energetica in funzione mizzazione energetica in funzione della temperatura ambientedella temperatura ambiente

A.A. 2003/2004A.A. 2003/2004 dia dia 8080/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema DCSSistema DCS
Quando occorrono numerosi controllori può essere opportuno collQuando occorrono numerosi controllori può essere opportuno collegarliegarli
1.02.15.01.11.02.15.01.1
rete di processo
rete di controllo
stazioneconfigurazione
MUX
Dati
notebook
gateway
interfacce uomo-macchina stampanteserver internet
UCM (PID/PLC) UCM (PID/PLC)
rete dispositivi
PLC
a un calcolatore rea un calcolatore re--moto cui sono affimoto cui sono affi--date, grazie a un date, grazie a un software specifico, software specifico, funzioni di gestiofunzioni di gestio--ne e di interfaccia ne e di interfaccia fra uomo e macchifra uomo e macchi--na centralizzata na centralizzata Reti di campo (Reti di campo (fieldfield--busbus), in genere a bus ), in genere a bus linearelineare

A.A. 2003/2004A.A. 2003/2004 dia dia 8181/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Sistema SCADASistema SCADA
Il sistema DCS:Il sistema DCS:
1.02.16.01.11.02.16.01.1
SCADA
rete di processo
rete di controllo
stazioneconfigurazione
MUX
Dati
notebook
gateway
interfacce uomo-macchina stampanteserver internet
UCM (PID/PLC) UCM (PID/PLC)
rete dispositivi
PLC
prende talvolta il prende talvolta il nome SCADA se è nome SCADA se è corredato da un sicorredato da un si--stema di supervistema di supervi--sione e acquisiziosione e acquisizio--ne di dati da elabone di dati da elabo--rare per fini anche rare per fini anche differenti da quelli differenti da quelli strettamente constrettamente con--nessi al fini del nessi al fini del controllocontrollo

A.A. 2003/2004A.A. 2003/2004 dia dia 8282/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Articolazione di un sistema SCADAArticolazione di un sistema SCADA
Il sistema SCADA può esseIl sistema SCADA può esse--re visto quindi come un sire visto quindi come un si--stema DCS integrato dal sistema DCS integrato dal si--stema di supervisionestema di supervisione
T T T T
DDC
VV V
T T T T
VV V
DDC...
sistema di supervisione (PC)sistema di supervisione (PC)
unità di controllo/monitoraggiounità di controllo/monitoraggio
1.02.16.01.21.02.16.01.2
RS232RS232--RS485RS485--doppinodoppino--modem modem o o EthernetEthernet ((fieldbusfieldbus))

A.A. 2003/2004A.A. 2003/2004 dia dia 8383/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Segnali di ingresso e uscitaSegnali di ingresso e uscita
La varietà di segnali di ingresso e uscita che si rileva nei catLa varietà di segnali di ingresso e uscita che si rileva nei cataloghi aloghi tecnitecni--ci si può ridurre alle seguenti 4 classi:ci si può ridurre alle seguenti 4 classi:1)1) Ingressi analogici (AI)Ingressi analogici (AI)2)2) Ingressi digitali (DI)Ingressi digitali (DI)3)3) Uscite analogiche (AO)Uscite analogiche (AO)4)4) Uscite digitali (DO)Uscite digitali (DO)
1.02.17.00.11.02.17.00.1

A.A. 2003/2004A.A. 2003/2004 dia dia 8484/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Ingresso analogicoIngresso analogico
Segnale di misura trasmesso da una sonda il cui valore può variaSegnale di misura trasmesso da una sonda il cui valore può variare in re in modo continuo nel campo di misuramodo continuo nel campo di misuraL’ingresso analogico può essere:L’ingresso analogico può essere:
Attivo:Attivo:Segnale di tensione (0Segnale di tensione (0÷÷10 V, 10 V, 22÷÷10 V, 10 V, ……))Segnale di corrente (0Segnale di corrente (0÷÷20 mA, 20 mA, 44÷÷20 mA, 20 mA, ……))
PassivoPassivoSegnale di resistenza (0Segnale di resistenza (0÷÷1 k1 kΩΩ, , 11÷÷2 k2 kΩΩ, , ……))
1.02.17.01.11.02.17.01.1

A.A. 2003/2004A.A. 2003/2004 dia dia 8585/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Elaborazione dell’ingresso analogicoElaborazione dell’ingresso analogico
L’ingresso analogico può essere elaborato da un controllore digiL’ingresso analogico può essere elaborato da un controllore digitale sotale so--lo dopo una conversione AD effettuata con periodo di campionamenlo dopo una conversione AD effettuata con periodo di campionamento to conforme al teorema di conforme al teorema di ShannonShannon
1.02.17.01.21.02.17.01.2
)2( µω⋅≥ωs )2( µω⋅≥ωs
Il campionamento sarà preceduto dal condizionamento attraverso uIl campionamento sarà preceduto dal condizionamento attraverso un n filtro PB per ovviare la trasposizione a bassa frequenza di compfiltro PB per ovviare la trasposizione a bassa frequenza di componenti onenti extrabanda che possono determinare frequenze ombra (extrabanda che possono determinare frequenze ombra (aliasingaliasing))Il condizionamento può essere:Il condizionamento può essere:
Passivo, se è limitato a attenuazione, Passivo, se è limitato a attenuazione, sopprerssionesopprerssione dei disturbi, converdei disturbi, conver--sione Isione I V,V, e filtrazionee filtrazioneAttivo, se comprende anche amplificazione e isolamentoAttivo, se comprende anche amplificazione e isolamento
Il condizionamento può avvenire in uscita dal sensore, in ingresIl condizionamento può avvenire in uscita dal sensore, in ingresso al siso al si--stema di acquisizione, o direttamente sulla scheda ADstema di acquisizione, o direttamente sulla scheda AD

A.A. 2003/2004A.A. 2003/2004 dia dia 8686/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Ingresso digitaleIngresso digitale
Segnale di misura onSegnale di misura on--off trasmesso da un interruttore (off trasmesso da un interruttore (pressostatopressostato, , termostato, termostato, umidostatoumidostato) il cui valore può essere derivato dai contatti ) il cui valore può essere derivato dai contatti ausiliari di un relé o di un teleruttoreausiliari di un relé o di un teleruttoreL’ingresso digitale può essere:L’ingresso digitale può essere:
Pulito (senza tensione)Pulito (senza tensione)In tensioneIn tensione
1.02.17.02.11.02.17.02.1
A.A. 2003/2004A.A. 2003/2004 dia dia 8787/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Uscita analogicaUscita analogica
Segnale di controllo applicato dal controllore su un Segnale di controllo applicato dal controllore su un attuatoreattuatore (servo(servo--motori o indicatori, o registratori, o setmotori o indicatori, o registratori, o set--point di controllori periferici), il point di controllori periferici), il cui valore può variare in modo continuo nel campo di misura:cui valore può variare in modo continuo nel campo di misura:
Segnale di tensione (0Segnale di tensione (0÷÷10 V, 10 V, 22÷÷10 V, 10 V, ……))Segnale di corrente (0Segnale di corrente (0÷÷20 mA, 20 mA, 44÷÷20 mA, 20 mA, ……))
L’uscita analogica si realizza amplificando e condizionando o isL’uscita analogica si realizza amplificando e condizionando o isolando il olando il segnale di un convertitore DAsegnale di un convertitore DA
1.02.17.03.11.02.17.03.1

A.A. 2003/2004A.A. 2003/2004 dia dia 8888/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Uscita digitaleUscita digitale
Segnale di controllo onSegnale di controllo on--off o incrementale applicato dal controllore su un off o incrementale applicato dal controllore su un attuatoreattuatoreAnche il comando flottante, o incrementale, di un motore bidirezAnche il comando flottante, o incrementale, di un motore bidirezionale ionale può infatti essere comandato da uscite digitali a tre posizioni:può infatti essere comandato da uscite digitali a tre posizioni: una per una per ogni senso di rotazione e una per l’assenza di segnaleogni senso di rotazione e una per l’assenza di segnaleL’uscita digitale deve essere isolata, soprattutto per motivi diL’uscita digitale deve essere isolata, soprattutto per motivi di sicurezsicurez--za, per esempio con relais o za, per esempio con relais o fotoaccoppiatorifotoaccoppiatori, o entrambi, o entrambi
1.02.17.04.11.02.17.04.1

A.A. 2003/2004A.A. 2003/2004 dia dia 8989/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Tipologie dei caviTipologie dei cavi
Ingressi analogiciIngressi analogiciCavo schermato 2x1,5 mmCavo schermato 2x1,5 mm22 dalle sonde 4dalle sonde 4÷÷20 mA e dai termistori20 mA e dai termistoriCavo schermato 3x1,5 mmCavo schermato 3x1,5 mm22 dalle sonde 0dalle sonde 0÷÷10 V10 V
Ingressi digitaliIngressi digitaliCavo schermato 2x1,5 mmCavo schermato 2x1,5 mm22 dalle sonde in campo ai contatti puliti degli ausiliari del dalle sonde in campo ai contatti puliti degli ausiliari del quadroquadro
Uscite analogicheUscite analogicheCavo schermato 3x1,5 mmCavo schermato 3x1,5 mm22 ai servocomandi modulantiai servocomandi modulantiCavo 2x1,5 mmCavo 2x1,5 mm22 a a inverterinverter motori 0motori 0÷÷10 V e umidificatori modulanti10 V e umidificatori modulanti
Uscite digitaliUscite digitaliCavo NON schermato 2x1,5 mmCavo NON schermato 2x1,5 mm22 a servocomandi a servocomandi bidirezionalibidirezionali e contattori del QE e contattori del QE di potenza di potenza
1.02.17.05.11.02.17.05.1

A.A. 2003/2004A.A. 2003/2004 dia dia 9090/198/198prof. ing. Domenico Salimbeniprof. ing. Domenico Salimbeni
Protocolli di comunicazioneProtocolli di comunicazione1.02.17.05.21.02.17.05.2