Embed Size (px)
Citation preview
Costruzione e validazione di una discretizza-zione totalmente simplettica per il modellobarotropico quasigeostrofico
Dipartimento di Scienze di Base ed Applicate per l’Ingegneria
Dottorato di Ricerca in Modelli e metodi matematici per la tecnologia ela società – XXIV Ciclo
Candidato
Francesco Bonghi
Matricola 692950
Relatore
Ch.mo Prof. Roberto Ferretti
Tesi presentata in parziale adempimento dei requisiti necessariper conseguire il titolo di Dottore di Ricerca in Modelli e metodimatematici per la tecnologia e la società

Il lavoro che ha portato a questa tesi si è avvantaggiato, oltre che dellasignificativa supervisione del mio relatore Prof. Roberto Ferretti, della
collaborazione del T. Col. Vinicio Pelino e del Cap. Filippo Maimone delCentro Nazionale di Meteorologia e Climatologia Aeronautica, ai quali vala mia gratitudine tanto per le loro proposte e suggerimenti quanto per il
tempo e le risorse che mi hanno dedicato.
Indice
Introduzione v
1 La circolazione atmosferica 1
1.1 Approssimazione delle acque basse . . . . . . . . . . . . . . . 1
1.2 Derivazione dell’equazione quasi geostrofica . . . . . . . . . 7
1.3 L’equazione quasi geostrofica . . . . . . . . . . . . . . . . . . 11
1.4 Quantità conservate . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Riduzione simplettica 17
2.1 La riduzione con le armoniche sferiche . . . . . . . . . . . . . 17
3 Integrazione in tempo simplettica 23
3.1 Metodi espliciti ed impliciti . . . . . . . . . . . . . . . . . . . 24
3.2 Metodi di Runge-Kutta . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Metodi di collocazione . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Metodi simplettici . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5 Metodi di Runge-Kutta simplettici . . . . . . . . . . . . . . . 34
3.6 Stime sull’errore . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4 Validazione del codice 41
iii
iv INDICE
4.1 Conservazione degli integrali primi . . . . . . . . . . . . . . 424.2 Anticorrelazione tra funzione di corrente e topografia . . . . 434.3 Evoluzione di un dato iniziale bianco . . . . . . . . . . . . . 454.4 Onde di Rossby . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5 Clusterizzazione dei dati 535.1 Caoticità del sistema . . . . . . . . . . . . . . . . . . . . . . . 535.2 Costruzione della clusterizzazione . . . . . . . . . . . . . . . 565.3 Qualche test preliminare . . . . . . . . . . . . . . . . . . . . . 58
Bibliografia 65
Introduzione
Differenti approcci possono essere usati nello studio della circolazioneatmosferica o oceanica, approcci che, provenenti da diverse branche dellescienze applicate, coinvolgono una grande varietà di strumenti matematici.
La climatologia e la meteorologia sono un esempio di ciò . Da una par-te infatti la meteorologia si occupa di soddisfare la necessità di costruireprevisioni nell’ordine dei giorni su scala sinottica, ovvero in aree dall’e-stensione di centinaia o migliaia di kilometri; dall’altra la climatologia,in cui le scale spazio-temporali sono maggiori. I fenomeni studiati dallaclimatologia avvengono infatti su scala planetaria ed in lassi di tempo che,partendo dall’ordine di grandezza dell’anno, possono arrivare a secoli oanche millenni (in caso si voglia studiare ad esempio la correlazione tral’attività antropica ed il clima o l’evoluzione del clima attraverso le eregeologiche).
Entrambi gli approcci partono da equazioni primitive che fondamen-talmente richiamano le equazioni di bilancio della massa, della quantità dimoto e dell’energia formulate nell’ambito della meccanica e della termodi-namica. Nella loro forma completa, queste equazioni costituiscono un mo-dello estremamente complesso; a seconda delle scale a cui si è interessati,però , è possibile apportare delle semplificazioni che le rendono più gesti-bili sia sotto l’aspetto modellistico che sotto quello della approssimazionenumerica, come vedremo in seguito.
Imprescindibilmente legata a questo tipo di sistemi è la nozione di caos
v
vi INTRODUZIONE
deterministico. Sotto questa definizione si indica il comportamento diffor-me di evoluzioni la cui posizione iniziale è anche quasi coincidente: duesoluzioni, relative a dati iniziali arbitrariamente vicini, si troveranno infattiad assumere comportamenti che andranno (esponenzialmente nel tempo)a differire sempre più , qualitativamente e quantitativamente, pur restan-do limitate. Non guasta ricordare che la nozione di caos deterministicofu introdotta, proprio per trattare un modello altamente semplificato dicella convettiva atmosferica, da Edward Lorenz, in un lavoro [Lor63] de-stinato ad avere una enorme influenza sul pensiero scientifico degli ultimicinquanta anni.
Usare un modello matematico per descrivere un fenomeno fisico, si-gnifica costruire un’evoluzione (sia pure approssimata) del sistema stessoa partire da condizioni date ad un istante iniziale. Dato che sia la misuradelle grandezze che descrivono la condizione iniziale che i vari parametrisono frutto di misurazioni approssimate, e che i calcoli stessi, essendo ese-guiti da calcolatori, presentano a loro volta ulteriori imprecisioni, la fortedipendenza dai dati iniziali diventa dal punto di vista meteorologico unabarriera alla predicibilità delle soluzioni. Affrontando invece il problemada un’ottica climatologica, la lunghezza dell’orizzonte temporale implicache la caoticità del sistema debba essere affrontata come una sua caratte-ristica intrinseca. Lo studio dell’andamento di una soluzione quindi nonprendere più in esame i valori che le grandezze fisiche assumono ad undato istante, ma piuttosto le regioni dello spazio delle fasi che vanno adattraversare, la frequenza con cui ciò avviene in un’ottica ergodica, ed ilsuo significato fisico.
Quindi seguire un approccio climatologico porta a conseguenze nonirrilevanti per quanto riguarda il solutore numerico da usare nelle simu-lazioni, ed in particolare la vicinanza della soluzione numerica a quellaanalitica e le proprietà di convergenza non saranno più gli unici criteri daseguire. Diviene invece più importante, per la verosimiglianza dei risultatinumerici ottenuti, la conservazione delle proprietà geometriche e statisti-che del sistema. In altre parole, un metodo numerico risulterà tanto piùadatto ai nostri scopi quanto più le soluzioni che genererà conserveranno
vii
le stesse quantità che vengono conservate dalle soluzioni analitiche delleequazioni, o almeno le quantità statisticamente rilevanti per previsioni alungo termine.
La strategia che adotteremo sarà precisamente questa. In primo luogodiscretizzare le equazioni della circolazione atmosferica globale (o megliouna loro approssimazione adatta ai nostri scopi) in uno spazio di dimen-sione finita adatto sia alla natura del sistema da descrivere che alla formadelle equazioni, operando una riduzione che mantenga il carattere conser-vativo delle soluzioni nel caso inviscido e senza sorgenti. In una secondafase, utilizzeremo un solutore numerico simplettico per il caso finito di-mensionale, ovvero una discretizzazione temporale che, pur lavorando suapprossimazioni numeriche delle soluzioni analitiche, permetta tuttaviadi definire quantità conservate analoghe e vicine a quelle del problemainiziale, così come è stato per la riduzione operata al primo passo.
Mediante questa tecnica di approssimazione potremmo abbordare ilproblema di studiare l’evoluzione del sistema, a dispetto della sua caoticitå,in termini di configurazioni ricorrenti, ovvero di regimi. Purtroppo, illivello di riduzione che abbiamo usato nelle simulazioni non permetteancora di usare nelle equazioni coefficienti realistici, ovvero relativi a stimeo misure sperimentali. Simulazioni effettuate in tale modo, non hannopermesso infatti nelle dimensioni finora affrontate di rendere visibili oquantomeno influenti tutti i fenomeni fisici che di volta in volta si volevaevidenziare. Le evoluzioni che presenteremo sono state perciò condottecon valori di dissipazione, forzante e condizioni iniziali trovati “a mano”.Tra quelle effettuate presenteremo quelle i cui coefficienti hanno permesso,senza cadere in stati banali, di poter integrare numericamente le equazionidescriventi il modello, generando evoluzioni in cui è possibile ritrovarealcune caratteristiche analitiche o atmosferiche note, o che possano essereda esempi per uno studio e trattamento dei dati.
viii INTRODUZIONE

CAPITOLO 1
Modellazione della circolazione atmosferica su
scala sinottica
L’oggetto del nostro studio è il moto di un fluido continuo chimicamen-te ed eletricamente inerte, descrivibile in prima istanza dalle equazioni diNavier-Stokes. Come accennato nell’introduzione, però , trovare soluzio-ni esatte di questo sistema di equazioni può non essere conveniente, edoltretutto l’ottica con cui stiamo studiando i moti atmosferici si limita allascala sinottica. Una volta assunta tale limitazione dei fenomeni in esame,risulterà conveniente tradurla in approssimazioni e farne uso per arrivaread equazioni via via più semplici da risolvere.
1.1
Dalle equazioni di Navier-Stokes all’approssimazio-
ne delle acque basse
Volendo descrivere efficacemente da punto di vista meccanico e termo-dinamico i fenomeni legati alla dinamica della circolazione atmosferica,
1

2 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
un utile strumento sono sicuramente le equazioni di di Navier-Stokes. Sitratta però di un insieme di equazioni che può risultare complicato dastudiare: non è infatti immediato che si possano trovare, analiticamente onumericamente, delle soluzioni (l’esistenza e la regolarità delle soluzioninel caso tridimensionale sono ancora oggi due tra i problemi aperti che ilClay Mathematical Institute ha inserito tra i “Problemi per il millennio”) oche farlo sia un compito alla portata delle odierne risorse di calcolo.
Una prima approssimazione che si può portare avanti è quella delleacque basse, in cui si sfrutta la prevalenza che hanno latitudine e longitudinerispetto alle variazioni in quota (i fenomeni che ci interessano avvengonosu una scala orizzontale almeno nell’ordine dei 1000 km mentre quellaverticale avviene sulle decine di km). Questa approssimazione permette,grazie ad un’integrazione nella coordinata relativa alla quota ed ad unosviluppo sul piano tangente al globo degli effetti della forza di Coriolis, diridurre le equazioni ad un sistema bidimensionale.
In altre parole, assumendo che:
• il rapportro tra la scala orizzontale L in cui avviene il moto e quellaverticale D sia tale che DL ! 1,
• il fluido sia omogeneo ed incomprimibile (con densità pari ad 1),
• l’unica forza esterna sia la gravità, e di essere vicini alla condizionedi equilibrio idrostatico, per cui si abbia BpBx3 “ ´g,
• l’asse di rotazione del fluido sia l’asse x3, con relativa vorticità plane-taria f ,
• sia assegnata la topografia dalla superficie x3 “ htopopx1, x2q, da cui,essendo x3 “ hpx1, x2, tq la superficie superiore del fluido, si abbia perquesto l’altezza H “ hpx1, x2, tq ´ htopopx1, x2q,
• la dissipazione sia trascurabile,

1.1. APPROSSIMAZIONE DELLE ACQUE BASSE 3
allora la dinamica (bidimensionale) del fluido altro è governata dalleequazioni
DvDt` f vK “ ´g∇ h (1.1)
DHDt
`H div v “ 0. (1.2)
essendoDDt
la derivata totale rispetto al tempo, o derivata materiale.
Dalla conservazione della quantità di moto si ha infatti (nel caso invi-scido, ovvero nella formulazione delle equazioni di Navier-Stokes dettaequazioni di Eulero)
Bv1
Bt` v1
Bv1
Bx` v2
Bv1
By` v3
Bv1
Bz´ f v2 “
BpBx, (1.3)
Bv2
Bt` v1
Bv2
Bx` v2
Bv2
By` v3
Bv2
Bz` f v1 “
BpBy, (1.4)
Bv3
Bt` v1
Bv3
Bx` v2
Bv3
By` v3
Bv3
Bz“BpBz. (1.5)
avendo posto per la densità ρ ” 1.
Se la variazione di altitudine è trascurabile rispetto agli spostamentiorizzontali che avvengono durante il moto, possiamo scrivere la pressio-ne mediante il suo sviluppo verticale intorno al punto in cui si verifical’equilibrio idrostatico. In altre parole
ppx, y, z, tq “ ´gz` ppx, y, z, tq. (1.6)
Unendo a (1.6) la condizione al bordo per la pressione, ovvero ppx, y, hq “p0, si ha
p “ gph´ zq ` p0,

4 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
da cui
BpBx“ g
BhBx,
BpBy“ g
BhBy.
Le ultime espressioni sulle derivate orizzontali della pressione impli-cano l’assenza di accelerazioni dipendendi da z, o in altre parole che sele velocità iniziali dipendono solo da px, y, tq (cosa che supporremo) ciòcontinuerà a valere anche nel futuro.
Le equazioni (1.3) e (1.4) diventano quindi
Bv1
Bt` v1
Bv1
Bx` v2
Bv1
By´ f v2 “ g
BhBx,
Bv2
Bt` v1
Bv2
Bx` v2
Bv2
By` f v1 “ g
BhBy,
ovvero, in forma vettoriale, la (1.1).
Informazioni sulla componente verticale della velocità possono esserericavate in primo luogo dalla condizione di incompressibilità del fluido.Integrando la condizione di divergenza nulla, e facendo uso del fatto chev1 e v2 non dipendono da z, abbiamo infatti
v3px, y, z, tq “ ´zˆ
Bv1
Bx`Bv2
By
˙
` v3px, y, tq. (1.7)
Si può a questo punto ricavare esplicitamente v3 imponendo che latopografia agisca da barriera impedendo il flusso del fluido, in altre paroleche la velocità del fluido a contatto con essa le sia tangente. Quindi, dalladefinizione di htopo,
v3px, y, htopo, tq “ v1Bhtopo
Bx` v2
Bhtopo
By,
da cui
v3 “ v1Bhtopo
Bx` v2
Bhtopo
By` htopo
ˆ
Bv1
Bx`Bv2
By
˙
,

1.1. APPROSSIMAZIONE DELLE ACQUE BASSE 5
che inserita in (1.7) porta a
v3px, y, z, tq “ phtopo ´ zqˆ
Bv1
Bx`Bv2
By
˙
` v1Bhtopo
Bx` v2
Bhtopo
By. (1.8)
Allo stesso modo possiamo utilizzare la definizione dell’altezza delflusso h, che questa volta porterà a
v3px, y, h, tq “BhBt` v1
BhBx` v2
BhBy,
che, inserita in (1.8) porterà a
BhBt`B“
v1ph´ htopoq‰
Bx`B“
v2ph´ htopoq‰
By“ 0,
che in termini di H diventa
BHBt`Bpv1HqBx
`Bpv2HqBy
“ 0,
ovvero l’equazione (1.2).
Il modello che abbiamo ottenuto è puramente bidimensionale. Pos-siamo però fare uso del rotore tridimensionale per definire la vorticitàdel flusso, definita dalla quantità ω in p0, 0, ωq “ rotpv1, v2, 0q, e studiarnel’evoluzione usando quanto calcolato per la velocità.

6 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
Valendo le identità
rotDvDt
“ rotˆ
BvBt` v∇ v
˙
,
“B
Btrot v`
Bv1
BxBv2
Bx` v1
B2v2
Bx2 `Bv2
BxBv2
By` v2
B2v2
BxBy
´Bv1
BxBv1
By´ v1
B2v1
BxBy`Bv1
ByBv2
By` v2
B2v1
By2 ,
“B
Btrot v`
ˆ
Bv2
Bx´Bv1
By
˙ˆ
Bv1
Bx`Bv2
By
˙
` v1B
Bx
ˆ
Bv2
Bx´Bv1
By
˙
` v2B
By
ˆ
Bv2
Bx´Bv1
By
˙
,
“ωdiv v`DωDt
,
e (ricordando che f non dipende esplicitamente dal tempo)
rotp f vKq “ divp f vq “ f div v` v ¨ ∇ f ,
“ f div v`D fDt,
otteniamo dalla (1.1), essendo nullo il rotore di un gradiente
DDtpω` f q “ ´pω` f qdiv v.
Quest’ultima divisa per H e facendo uso delll’equazione (1.2) diventa
1H
DDtpω` f q ´
1H2 pω` f q
DHDt
“ 0
ovvero la legge di conservazione per la vorticità potenziale, ovvero la quan-tità Πs “ pω` f qH
DDtω` f
H“ 0. (1.9)
La conservazione di questa quantità è significativa nello studio delladinamica del fluido: ci dice infatti, tra le altre cose, che la vorticità ècostante solo se non varia l’altezza del fluido, e che aumenta o diminuisce

1.2. DERIVAZIONE DELL’EQUAZIONE QUASI GEOSTROFICA 7
all’aumentare o al diminuire di H.
1.2
Derivazione dell’equazione quasi geostrofica
L’ipotesi di incomprimibilità del fluido ci consente, oltre a semplifica-re il modello, di filtrare le onde acustiche, non importanti nei fenomeniche stiamo studiando. Abbiamo così un fluido il cui moto è dato da duecomponenti: una più lenta in cui la massa effettivamente compie uno spo-stamento, ed una più veloce relativa alle onde di gravità, in cui il fluidoseppur oscillando resta mediamente fermo, e che sono quindi ininfluentinella circolazione globale. Un discorso simile vale anche per l’approssima-zione quasi geostrofica, in cui si assume di essere vicini alla posizione dovegradiente della pressione e forza di Coriolis si bilanciano (lontani quindidall’equatore), ovvero in prossimità dell’equilibrio geostrofico. Oltre ad ave-re un sistema per il quale sia più facile trovare soluzioni, ciò ci permette,senza cadere in uno stato stazionario geostrofico, di filtrare tra queste letrascurabili onde gravitazionali così come in precedenza sono state filtratequelle acustiche.
Avendo indicato con V la scala della velocità, con T “ LV la sca-la dei tempi, con H0 l’altezza media del fluido e con N0 la variazionemedia dell’altezza, introduciamo le seguenti quantità adimensionali utilia definire lo scalamento che opereremo (essendo f , 0 in conseguenzadell’approssimazione quasi geostrofica):
- il numero di Rossby:
Ro “VL f, (1.10)
ovvero il rapporto tra il periodo della rotazione terrestre f´1 e la scalatemporale LV,
- il numero di FroudeFr “
Va
gH0, (1.11)

8 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
il rapporto tra la velocità del fluido e la velocità delle onde gravita-zionali
a
gH0,
- il raggio di deformazione di Rossby
LR “
a
gH0
f, (1.12)
la scala spaziale oltre la quale gli effetti della forza di Coriolis preval-gono su quelli della forza di gravità,
- il rapporto
Θ “N0
H0, (1.13)
la variazione media dell’altezza relativa all’altezza media.
A questo punto possiamo adimensionalizzare le equazioni (1.3),(1.4) ed(1.9), esprimendole in termini delle quantità
px1, y1q “px, yq
L, t1 “
tT,
v1 “vV, h1 “
hN0,
ottenendo
DvDt` Ro´1vK ` Fr´2Θ∇ h “ 0,
DhDt´Θ´1v ¨ ∇
ˆ
htopo
H0
˙
`Θ´1
ˆ
1`Θh´htopo
H0
˙
div v “ 0,
DDt
R0ω` 1
1`Θh´ htopo
H0
“ 0.
(1.14)
Per andare a costruire il modello quasi geostrofico dovremo ora assu-mere che:
• valga per il numero di Rossby
Ro “ ε ! 1,

1.2. DERIVAZIONE DELL’EQUAZIONE QUASI GEOSTROFICA 9
ovvero non siano trascurabili gli effetti dovuti alla rotazione,
• la scala della topografia sia comparabile con quella delle perturba-zioni dell’altezza del fluido, ovvero
htopo “ Nohtopo,
• ci si trovi vicino alla condizione di equilibrio geostrofico, stato in cuile forze di pressione sono bilanciate dagli effetti della rotazione
Θ
Fr2 “1
Ro,
da cui, applicando le definizioni
N0 “f VL
g,
• la scala spaziale sia comparabile con il raggio di deformazione diRossby
ˆ
LLR
˙2
“ F “ Op1q.
Queste posizioni permettono di esprimere i coefficienti relativi alloscalamento in termini dei soli F ed ε. Utilizzando le definizioni in (1.10),(1.11), (1.12) e (1.13) le equazioni adimensionalizzate in (1.14) diventano
DvDt` ε´1vK “ ´ε´1
∇ h,
Fp1` εFhtopo ´ ε f htopoq´1
ˆ
DhDt´ v ¨ ∇ htopo
˙
` ε´1 div v “ 0,
DDt
1` εω1` εFh´ ε f htopo
“ 0.
(1.15)

10 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
Assumendo ora che h, v e (quindi) ω possano essere espresse come
vpx, y, tq “8ÿ
i“0
εivipx, y, tq hpx, y, tq “8ÿ
i“0
εihipx, y, tq
ωpx, y, tq “8ÿ
i“0
εiωipx, y, tq
sia ha, per i coefficienti di ε´1 in (1.15)
v0 “ ∇K h0,
∆ h0 “ ω0,
DDt
“
ω0 ´ Fph0 ´ htopoq‰
“ 0, (1.16)
ovvero le equazioni quasi geostrofiche.
Sottolineamo l’analogia formale tra queste equazioni e la formulazionein termini di vorticità e flusso delle equazioni di Eulero bidimensionali, dicui adotteremo la notazione nel seguito,
v “ ∇Kψ,
∆ψ “ ω,
DωDt
“ 0.
in cui il posto di h viene preso dalla funzione di corrente; cosa questa chenon stupisce, essendo anche per h la velocità tangente alle curve di livello,curve su cui quindi avviene il moto.
A differenza delle equazioni di Eulero, però , grazie al presenza di F , 0in (1.16), compaiono esplicitamente gli apporti di topografia e rotazione.

1.3. L’EQUAZIONE QUASI GEOSTROFICA 11
1.3
L’equazione quasi geostrofica
In forma più generale, volendo prendere in considerazione anche unafonte di energia esterna, quale l’irraggiamento solare, e fenomeni dissipa-tivi, risulta utile scrivere le equazioni quasi geostrofiche in termini dellavorticità assoluta q “ ω` f ` h.
Le equazioni diventano in questo contesto
DqDt
“ Dp∆qψ` q f ,
ω “ ∆ψ,
v “ ∇Kψ “
¨
˚
˝
´Bψ
ByBψ
Bx
˛
‹
‚,
(1.17)
essendo, come prima, v la velocità, ω la vorticità relativa, ψ la funzione dicorrente,Dp∆q un termine relativo a meccanismi di tipo viscoso e dissipa-tivo e q f una componente forzante esterna. Da notare lo stretto legame trafunzione ψ e la pressione. Se abbiamo infatti già visto come la funzione dicorrente descriva le traiettorie del moto, queste non possono nell’appros-simazione quasi geostrofica scostarsi dalle isobare, essendo la pressionebilanciata dagli effetti centrifughi della rotazione.
Vale inoltre per la derivata sostanziale
DqDt
“BqBxBxBt`BqByByBt`BqBt
“BqBx
v1 `BqBy
v2 `BqBt
“
ˆ
Bψ
BxBqBy´BqBxBψ
By
˙
`BqBt. (1.18)
La parte tra parentesi nel secondo membro di (1.18) altro non è che ildeteminante dello jacobiano di un cambio di variabile, che indichieremo

12 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
qui e nel seguito con J , portando a
DqDt
“ Jpψ, qq `BqBt
La scelta del termine Dp∆q è fortemente influenzata dai fenomeniche vogliono andarsi a descrivere, e numerose varianti se ne trovano inletteratura.
Quella che andremo a considerare ([Sel95]) sarà la seguente
Dp∆qψ “ k1 ∆ψ` k2 ∆4ψ, k1 ą 0, k2 ă 0,
in cui il primo termine tiene conto degli effetti della dissipazione di Ekman(più significativa a larga scala) ed il secondo del contributo di fenomeni diiperviscosità (preponderanti a scale inferiori).
La (1.17) assume quindi la forma, usando il punto per la derivata par-ziale e sostituendo da cui in avanti ∆ con ∆S2 per sottolineare la geometriasferica in cui lavoriamo
9q “ ´Jpψ, qq ` k1 ∆S2 ψ` k2 ∆S24ψ` q f (1.19)
Risultati di buona posizione
Ad ora non ci risultano presenti in letteratura risultati sulla buonaposizione del problema di Cauchy per l’equazione quasi geostrofica perla vorticità in geometria sferica. Le ipotesi da dare al dato iniziale sonoquindi da ereditare dai casi molto simili delle equazioni di Navier-Stokesed Eulero bidimensionali, equazioni studiate largamente e con una grandevarietà di strumenti.
Citiamo ad esempio la dimostrazione di unicità ed esistenza di solu-zioni locali in tempo per l’equazione di Navier-Stokes di Fujita e Kato incui vengono usate la teoria di operatori tra spazi di Hilbert e la teoria deisemigruppi ([FK64]), lo studio della regolarità di soluzioni a simmetria as-siale portato avanti da Chen, Strain, Yau e Tsai mediante riscalamento dellecoordinate ([CSYT08]), lo studio di Chemin e Gallagher di alcune condi-
1.4. QUANTITÀ CONSERVATE 13
zioni sufficienti per esistenza, unicità e regolarità di soluzioni deboli per leequazioni di Navier-Stokes mediante stime in spazi Lp ([CG06], [CG09]),lo studio di condizioni per esistenza, unicità e regolarità delle equazioni diNavier-Stokes mediante la teoria delle trasformate di Fourier e Laplace diA. ed M. Tsionskiy ([TT10a], [TT10b]).
1.4
Quantità conservate
Il caso conservativo, ovvero in assenza di viscosità e forzanti esterne,ammette diversi integrali primi, l’energia cinetica e le enstrofie generaliz-zate, quantità definite come segue.
Definizione 1.4.1. Definiamo l’energia cinetica E e l’enstrofia generalizzata Grelativa ad una funzione G P C1pS2;Rq rispettivamente come
Epqq “12
ż
S2|v|2 dσ, (1.20)
Gpqq “ż
S2Gpqq dσ. (1.21)
Come anticipato, vale il seguente teorema.
Teorema 1.4.1. Sia q tale cheDqDt
“ 0.
Allora E e G sono integrali primi del moto.
Dimostrazione. Essendo
Epqq “12
ż
S2|∇Kψ|2 dσ,
“´12
ż
S2ψ∆S2 ψ dσ
14 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
si ha per l’energia
dEdtpqq “ ´
12
ż
S2ψB∆S2 ψ
Btdσ
“´12
ż
S2ψBqBt
dσ
“´12
ż
S2ψJpψ, qq dσ
“´12
ż
S2ψ∇Kψ ¨ ∇ q dσ
“´12
ż
S2∇Kpψ2q ¨ ∇ q dσ “ 0.
e per le enstrofie,
dGdtpqq “
ż
S2
BGpqqBt
dσ
“
ż
S2
BGBqpqqBqBt
dσ
“´
ż
S2
BGBqpqq∇Kpψq ¨ ∇ q dσ “ 0.
Tra le enstrofie generalizzate useremo in seguito solo quelle relative afunzioni G pari a potenze di q. Prendendo in prestito una terminologiameno specifica di quella che stiamo qui usando (vedia ad esempio [AM88],[BR06], [HLW03], [Zei91] [Zei04]) chiameremo queste quantità Casimir,definite come
Cn “
ż
S2qn dσ, (1.22)
per il quale Casimir relativo a n “ 2 si ha quella che viene a tutti gli effettichiamata enstrofia.
Nonostante queste leggi di conservazione non valgano più quandoenergia viene immessa nel sistema o quando questa venga dissipata, taliquantità restano importanti nello studio della dinamica del sistema. Pro-prio per questo vedremo più in avanti come, pur cercando di trovare delle

1.4. QUANTITÀ CONSERVATE 15
soluzioni numeriche di (1.17) che siano solo vicine a quelle analitiche, leapprossimazioni che faremo nei capitoli 2 e 3 (risolvendo le equazioni inuno spazio di dimensione finita compreso nello spazio di partenza e usan-do uno schema numerico per l’integrazione in tempo delle equazioni inquesto spazio), continueranno a mantenere per le soluzioni calcolate laconservazione di queste quantità nel caso inviscido ed isolato.
Riferimenti bibliografici
Per quanto riguarda la formulazione delle equazioni delle acque bassesi è fatto riferimento a [Ped87]. Le sezioni sull’equazione quasi geostroficasi sono basate invece su [Maj03] e [MW06].

16 CAPITOLO 1. LA CIRCOLAZIONE ATMOSFERICA
CAPITOLO 2
Riduzione finito dimensionale simplettica
Vogliamo ora risolvere numericamente l’equazione (1.19), ed a tal sco-po risulta conveniente porsi in dimensione finita. In altre parole vogliamoscegliere una famiglia di spazi di dimensione finita su cui definire il pro-blema che bene approssimino lo spazio di partenza SDi f f pS2q e nei qualisi conservi la struttura geometrica delle equazioni.
2.1
La riduzione con le armoniche sferiche: un tronca-
mento conservativo
Avendo le grandezze in gioco un dominio sferico, possiamo espandereuna soluzione dell’equazione (1.19) come somma delle sue componentinello spazio delle armoniche sferiche sulla sfera, che costituiscono unabase ortonormale dello spazio L2pSq, (vedi a tal proposito, ad esempio,
17
18 CAPITOLO 2. RIDUZIONE SIMPLETTICA
[SW71])
q “8ÿ
l“0
lÿ
m“´l
qlmYlm.
Ciò consente di sfruttare la proprietà delle armoniche sferiche di essereautovalori del laplaciano sulla sfera, più precisamente si ha
∆S2 Ylm “ ´lpl` 1qYlm,
La stessa decomposizione si può anche avere per l’operatoreJ (o, meglio,per iJ), definendo le quantità γl2m2
lm,l1m1 nel modo seguente
γl2m2lm,l1m1 “
ż
S2iJpYl1m1 ,Yl2m2qYlm.
per cui si ha
iJpYl1m1 ,Yl2m2q “
8ÿ
l“0
lÿ
m“´l
γl2m2lm,l1m1Ylm
e da cui segue, integrando per parti e sfruttando che Ylm “ p´1qmYl´m,
γlml1m1,l2m2 “ p´1qm`m2γl2´m2
l´m,l1m1
γlml1m1,l2m2 “
ż
S2iˆ
BYl2m2
BxBYlm
By´BYlm
BxBYl2m2
By
˙
Yl1m1
“p´1qm1
ż
S2iˆ
BYl2m2
BxBYlm
ByYl1´m1 ´
BYlm
BxBYl2m2
ByYl1´m1
˙
“p´1qm1
ż
S2iˆ
BYl1´m1
BxBYl2m2
ByYlm ´
BYl2m2
BxBYl1´m1
ByYlm
˙
“p´1qm`m1ż
S2iˆ
BYl1´m1
BxBYl2m2
By´BYl2m2
BxBYl1´m1
By
˙
Yl´m
“p´1qm`m1γl2m2l´m,l1´m1 .

2.1. LA RIDUZIONE CON LE ARMONICHE SFERICHE 19
L’equazione (1.19) diventa quindi
9q “´Jpψ, qq ` k1 ∆S2 ψ` k2 ∆S24ψ` q f
“´J`
∆-1S2 ω, q
˘
` k1ω` k2 ∆S23ω` q f
“´J
˜
∆-1S2
ÿ
l1m1ωl1m1Yl1m1 ,
ÿ
l2m2ql2m2Yl2m2
¸
` k1ω
` k2 ∆S23ÿ
lm
ωlmYlm ` q f
“´J
˜
ÿ
l1m1´
1l1pl1 ` 1q
ωl1m1Yl1m1 ,ÿ
l2m2ql2m2Yl2m2
¸
` k1ω
´ k2
ÿ
lm
rlpl` 1qs3ωlmYlm ` q f
“´ iÿ
lm
ÿ
l1m1
ÿ
l2m2γlm
l1m1,l2m21
l1pl1 ` 1qωl1m1ql2m2Ylm ` k1ω
´ k2
ÿ
lm
rlpl` 1qs3ωlmYlm ` q f ,
con ω “ q´ h´ f .
Passando all’equazione per ciascun coefficiente spettrale abbiamo quin-di
9qlm“ ´i
ÿ
l1m1
ÿ
l2m2γlm
l1m1,l2m21
l1pl1 ` 1qωl1m1ql2m2
` k1ωlm´ rlpl` 1qs3k2ω
lm` qlm
f ,
che diventa, ponendo χlm “ iχlm “ ip´1qmχl´m, χ “ q, ω, q f ,
9qlm “´ÿ
l1m1
ÿ
l2m2p´1qm`m1`m2γl´m
l1m1,l2m21
l1pl1 ` 1qωl1´m1ql2´m2
` k1ωlm ´ rlpl` 1qs3k2ωlm ` q f ,lm,
“´ÿ
l1m1
ÿ
l2m2p´1qm
1
γl2m2lm,l1m1
1l1pl1 ` 1q
ωl1´m1ql2m2 ` k1ω´ rlpl` 1qs3k2ωlm ` q f ,lm,
(2.1)

20 CAPITOLO 2. RIDUZIONE SIMPLETTICA
Per avere un troncamento autoconsistente, definiamo le matrici TpNqlm
pTpNqlm qi, j “ p´1qN´1
2 ´ia
2l` 1
˜
N´12 l N´1
2
´i m j
¸
1, (2.2)
per i quali commutatori si ha
rTpNqlm ,TpNql1m1s “
8ÿ
l“0
lÿ
m“´l
f pNql2m2
lm,l1m1 TpNql2m2 ,
con
f pNql2m2
lm,l1m1 “ r1´ p´1ql`l1`l2sp´1qm
2`1a
2l` 1a
2l1 ` 1a
2l2 ` 1 ¨
¨
˜
l l1 l2
m m1 m2
¸#
l l1 l2N´1
2N´1
2N´1
2
+
.
Con il termine autoconsistente sottolineiamo il fatto che, scelta una sogliadi troncamento N, automaticamente avremo solo una quantità finita di TpNqlm
non nulli. Essendo infatti un coefficiente di Wigner 3 j, indicato in generalecome
˜
j1 j2 j3
m1 m2 m3
¸
,
non nullo solo per valori di j2 tali che | j1 ´ j3| ď j2 ď j1 ` j3, discentedalla definizione (2.2) che gli unici TpNqlm diversi da zero saranno quelli con0 ď l ď N ´ 1.
Le matrici TpNqlm così definite strettamente legate alle Ylm. Le armonichesferiche possono essere espresse in termini di polinomi armonici dellecoordinate cartesiane nel modo seguente:
rlYlmpθ,ϕq “ÿ
i1,...,il
apmqi1,...,ilxi1 , . . . , xil , r2
“ x21 ` x2
2 ` x23. (2.3)
Un’analoga rappresentazione vale anche per le matrici TpNqlm .
1Qui e nel seguito indicheremo con p:::q e t:::u rispettivamente i simboli di Wigner 3 j e6 j
2.1. LA RIDUZIONE CON LE ARMONICHE SFERICHE 21
Essendo infatti S1,S2,S3 la rappresentazione vettoriale in dimensione Ndel gruppo delle rotazioni SUpNq e X1,X2,X3 una loro rinormalizzazionecon un fattore 2
?N2 ´ 1, le matrici TpNqlm (per l,m , 0) possono essere
ricavate dalla (2.3) sostituendo le Xi alle xi. Lo spazio generato dalle TpNqlm
può essere quindi visto come una copia di quello generato dalle Ylm.Si ha inoltre ([Hop89], [Hop82])
f pNql2m2
lm,l1m1 “ γl2m2lm,l1m1 ` opN´2
q. (2.4)
Possiamo allora risolvere nello spazio generato dalle TpNqlm il problemaformulato inizialmente in SDi f f pS2q (troncato per l ă N), che diventa
9qlm “ ´
N´1ÿ
l1“1
N´1ÿ
l2“1
l1ÿ
m1“´l1
l2ÿ
m2“´l2p´1qm
1
f pNql2m2
lm,l1m11
l1pl1 ` 1qωl1´m1ql2m2
` k1ωlm ´ rlpl` 1qs3k2ωlm ` q f ,lm, (2.5)
commettendo un errore localmente controllabile grazie a (2.4), pari a, se q1
è soluzione dell’equazione (1.19) (troncata) e q2 di (2.5) e se t P r0,Ts
|q1 ´ q2| ď cT oˆ
1N
˙
. (2.6)
Avendo come dominio la sfera, ovvero un insieme compatto, la (2.6) cipermette anche di avere un controllo della norma di L2pS2q, per la qualeabbiamo ∥∥∥q1 ´ q2
∥∥∥2
L2pS2q“
ż
S2|q1 ´ q2|
2ď cT o
ˆ
1N2
˙
.
Caratteristica del problema definito nello spazio delle TpNqlm è, comevedremo in seguito, la presenza di integrali primi anche nel caso finitodimensionale, dati da
tr´´
qlmTpNqlm
¯n,¯
, n “ 1, . . . ,N ´ 1. (2.7)
quantità che vedremo nel capitolo 3 essere strettamente collegate aiCasimir del problema originario.

22 CAPITOLO 2. RIDUZIONE SIMPLETTICA
Studiare il sistema usando i coefficienti f pNql2m2
lm,l1m1 consente di avere adisposizione per l’analisi delle soluzioni del problema degli integrali primivicini a quelli dell’equazione (2.1) anche in dimensione finita, e di calcolomolto più semplice. Il costo di quest’operazione risiede come abbiamovisto in una convergenza più lenta, in cui si è passati, per una soluzione inCk da una velocità di convergenza pari a opN´kq ([CHM`06]) a quella datada (2.6).
Riferimenti bibliografici
Per quanto riguarda la costruzione del troncamento ci si è basati su[Zei04] Per la costruzione delle matrici TpNqlm si sono usati i risultati in[Hop89] e [HY98], mentre dettagli sulla convergenza dei f pNql
2m2
lm,l1m1 ai γl2m2lm,l1m1
si possono trovare in [Zei91].La letteratura su armoniche sferiche e spazi di Hilbert è ampia, ci
limitiamo a citare, tra gli altri [SW71], [Leb72].Una trattazione dei coefficenti di Wigner può essere trovata in [LL94]
CAPITOLO 3
Integrazione in tempo simplettica
In questo capito ci dedicheremo all’integrazione dell’equazione (2.5).
Nei capitoli precendenti ci siamo dedicati a formulare il problema ini-ziale su una famiglia di spazi che approssimano lo spazio funzionale dacui siamo partiti, nel senso che l’unione degli infiniti spazi della famiglia èuguale allo spazio di partenza.
La maggiore difficoltà che avevamo era nel trattare il funzionale lapla-ciano definito sulla sfera, ed il l nucleo della nostra strategia è stato porci,ad ogni stato di approssimazione, nello spazio generato dagli autovettoridi tale funzionale. In altre parole ci siamo posti nello spazio generato dallearmoniche sferiche tYlmulďN.
Quello in cui ci siamo trovati è, da un problema definito in uno spaziodi dimension e infinita, un problema definito in uno spazio di dimensionefinita, ottenendo un problema di Cauchy del tipo
#
y1 “ f px, yq,
ypx0q “ y0,(3.1)
per una funzione f P C1pI ˆ J; Jq, I Ă R, J Ă Rn.
23

24 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
Resta ora da portare a termine l’integrazione, ovvero trovare un algo-ritmo che permetta, con un numero finito di operazioni implementabili suun calcolatore, di trovare due successioni di valori tyiu Ă J e txiu Ă I taliche yi sia “abbastanza vicino” a ypxiq.
Insieme al costo in termini di risorse di calcolo, cosa si intenda con“abbastanza vicino”, se una effettiva piccola distanza dei valori, la conser-vazione di integrali primi o altro, è uno dei fattori che portano a scegliereun algoritmo piuttosto che un altro. Di rilevante importanza sono perciò lecaratteristiche che si vogliono studiare dell’equazione, o del modello chel’equazione descrive.
3.1
Metodi espliciti ed impliciti
Il problema (3.1) si può scrivere in forma integrale
ypxq “ y0 `
ż x
x0
f pt, yptqq dt,
perciò una strategia di risoluzione è cercare un modo di approssimarel’integrale a secondo membro per avere un’approssimazione di ypxq. Unprima scelta può essere approssimare i valori assunti da f con f px0, y0q,così da avere nel punto x1 ypx1q « px1 ´ x0q f px0, y0q ` y0. Una volta sceltii punti txiu come discretizzazione di I, otteniamo così la mappa iterativa,assumendo che tra gli xi ci sia una distanza costante pari ad h,
y1 “ y0 ` h f px0, y0q,
chiamata metodo di Eulero in avanti o metodo di Eulero esplicito.
Un’altra scelta può essere quella di approssimare il valore dell’in-tegrando con il valore della funzione in px1, y1), ottenendo un’analogamappa
y1 “ y0 ` h f px1, y1q,

3.1. METODI ESPLICITI ED IMPLICITI 25
il cosiddetto metodo di Eulero all’indietro o metodo di Eulero implicito.
Questi 2 esempi di metodi di integrazione mostrano una prima cate-gorizzazione dei metodi: quelli simili al primo, in cui il valore di y1 èimmediatamente ricavabile dalle informazioni già ottenute sono i metodiespliciti, al contrario sono indicati come impliciti i metodi in cui y1 compareanche nella definizione della mappa.
Per avere un’indicazione della velocità con cui tyiu approssima y diamola seguente definizione per metodi ad un passo (ovvero metodi in cui livalore della funzione approssimata in un punto dipende dal solo puntoprecedente).
Definizione 3.1.1. Un metodo ad un passo per la soluzione del problema(3.1) ha ordine p se l’errore locale y1 ´ ypx0 ` hq soddisfa intorno a x0
y1 ´ ypx0 ` hq “ Ophp`1q.
In questo senso, entrambi i metodi di Eulero (quando f è abbastanzaregolare) hanno ordine 1. Nonostante ciò può convenire usare il metodoimplicito che, a fronte di un maggiore costo di calcolo per l’inversione dif , risulta più stabile.
Si può compiere un passo ulteriore approssimando il valore di y1 con lamedia tra f px0, y0q e f px1, y1q o calcolando f in una posizione intermediatra y0 e y1. In questa maniera si definiscono rispettivamente il metodo deitrapezi o di Crank-Nicolson
y1 “ y0 ` hf px0, y0q ` f px1, y1q
2
ed il metodo del punto intermedio, o di Heun
y1 “ y0 ` h fˆ
x0 ` x1
2,
y0 ` y1
2
˙
.

26 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
3.2
Metodi di Runge-Kutta
I metodi che abbiamo visto finora hanno delle interpretazioni geome-triche, che hanno portato alla formulazione dei metodi di tipo Runge-Kuttao di collocazione.
Come abbiamo visto in precedenza, il nocciolo del problema è trova-re una buona approssimazione di yi`1 ´ yi. Per quanto riguarda i duemetodi di Eulero, il metodo di Crank Nicolson ed il metodo di Heun,altro non si è fatto che approssimare il grafico della funzione y nel pun-to pxi, yiq con una retta di coefficienti angolari pari a f pxi, yiq, f pxi`1, yi`1q,p f pxi, yiq` f pxi`1, yi`1qq2 o f ppxi`xi`1q2, pyi` yi`1q2q (che, sottolineiamo,non corrisponde al calcolare f in una posizione intermedia alle 2 preceden-ti). Un altro modo in cui si può interpretare l’approssimazione del metododi Cranc-Nicolson è con l’uso di una spezzata, costituita da 2 segmentidi coefficenti angolari rispettivamente f pxi, yiq e f pxi`1, yi`1q ognuno adapprossimare il grafico di y nelle due metà dell’intervallo pxi, xi ` hq.
I metodi di Runge-Kutta usano una strategia analoga. L’intervallopxi, xi ` hq è ora diviso in s parti, di lunghezza rispettivamente b1, . . . , bs,ed punti pxi, yiq e pxi`1, yi`1q sono congiunti da una spezzata composta das segmenti. Il j_esimo coefficiente angolare k j sarà calcolato a sua voltavalutando la funzione f al termine di una spezzata, costruita in manieraimplicita dai coefficienti ed utilizzando dei pesi prestabiliti ai, j e ci “
ř
j ai, j.In altre parole, abbiamo la seguente definizione.
Definizione 3.2.1. Un metodo di Runge-Kutta con s nodi è un metodo adun passo definito dalla mappa
ki “ fˆ
x0 ` cih, y0 ` hsÿ
j“1
ai, jk j
˙
, (3.2)
y1 “ y0 ` hsÿ
i“1
biki. (3.3)

3.2. METODI DI RUNGE-KUTTA 27
Seguendo la terminologia introdotta in precedenza, il metodo di Runge-Kutta sarà esplicito solo se sarà esplicita la (3.2), ovvero se ai, j “ 0 peri ď j.
Possiamo ora scrivere in questi termini i metodi visti. Usando lanotazione
... ¨ ¨ ¨
ci... ai, j
...... ¨ ¨ ¨
¨ ¨ ¨ b j ¨ ¨ ¨
abbiamo rispettivamente per il metodo di Eulero in avanti, all’indietro, diCranck-Nicolson ed Heun
0 0
1,
1 1
1,
0 0 01 12 12
12 12
,12 12
1.
Calcolando lo sviluppo di Taylor della mappa, si possono calcolare dellecondizioni che garantiscono l’ordine del relativo metodo di Runge-Kutta(per lo meno per ordini inferiori o uguali a 3).
Si ha quindi
ordine 3
$
’
’
’
’
’
’
’
’
’
’
’
&
’
’
’
’
’
’
’
’
’
’
’
%
ordine 2
$
’
’
&
’
’
%
ordine 1"
ÿ
i
bi “ 1,
ÿ
i
bici “12,
ÿ
i
bic2i “
13,
ÿ
i, j
ai, jbic2i “
13.
da cui segue ordine 1 per i metodi di Eulero, 2 per i metodi di Heun eCrank-Nicolson, e per le loro versioni esplicite (trascurando di riportare
28 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
gli zeri dopo l’ultimo ai, j non nullo della riga)
01 1
12 12
012 12
0 1
e ordine superiore a 3 (in effetti uguale a 4) dei metodi di Runge-Kutta
012 1212 0 121 0 0 1
16 26 26 16
013 1323 ´13 11 1 ´1 1
18 38 38 18
3.3
Metodi di collocazione
Un’altra interpretazione del metodo di Crank-Nicholson è la seguente.L’algoritmo può essere visto come generato da una funzione di secondogrado, nel senso che l’incremento da yn a yn`1 è calcolato grazie alle derivatedi questa funzione nei punti xn ed xn`1, ed in quest’ottica si leggono i fattorif px0, y0q ed f px1, y1q.
Generalizzando questa interpretazione, si costruiscono, mediante i po-linomi u i metodi di collocazione nel modo seguente.
Definizione 3.3.1. Siano c1, . . . , cs numerali reali distinti compresi tra 0 ed1. Il polinomio di collocazione uptq è un polinomio di grado s tale che
upx0q “y0,
9upx0 ` cihq “ f px0 ` cih,upx0 ` cihqq, i “ 1, . . . , s.(3.4)
Il metodo di collocazione relativo a tale u è definito da
y1 “ upx0 ` hq.

3.3. METODI DI COLLOCAZIONE 29
Facilmente si ottengono i metodi che abbiamo visto in precedenza. Pers “ 1 il polinomio ha la forma
upxq “ y0 ` kpx´ x0q, con k “ f px0 ` ch, y0 ` hckq,
ed otteniamo rispettivamente il metodo di Eulero esplicito ed implicito edil metodo di Heun ponendo c “ 0, c “ 1 e c “ 12, mentre otteniamo il me-todo di Crank-Nicholson, coerentemente con l’interpretazione presentataad inizio sezione, per s “ 2, c1 “ 0 e c2 “ 1.
I metodi di collocazione possono essere visti come metodi di Runge-Kutta, ed ereditare così tutte le proprietà che si dimostrino per quest’ultimi.Vale infatti il seguente teorema.
Teorema 3.3.1 (Guillou e Soulé 1969, Wright 1970). Il metodo di collocazionedefinito in (3.4) è equivalente ad un metodo di Runge-Kutta di coefficienti
ai j “
ż ci
0l jptq dt, bi “
ż 1
0liptq dt, (3.5)
avendo chiamato li lo i_esimo polinomio di Lagrange
liptq “ź
j,i
t´ c j
ci ´ c j.
Dimostrazione. Sia upxq il polinomio interpolatore, e ki “ 9upx0 ` cihq. Es-sendo uun polinomio di grado s, un’interpolazione di Lagrange a s nodipermette di calcolarlo senza errori, ovvero abbiamo
9upx0 ` thq “sÿ
j“1
k jl jptq.
Quest’ultima, integrata in t da 0 a ci diventa
upx0 ` cihq “ y0 ` hsÿ
j“1
k j
ż ci
0l jptq dt “ y0 ` h
sÿ
j“1
ai jk j,

30 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
così che dalla definizione di polinomio interpolatore si ha
ki “ f´
x0 ` cih, y0 ` hsÿ
j“1
ai jk j
¯
,
ovvero la (3.2).
Per ottenere la (3.3) basta invece integrare l’interpolazione da 0 ad 1,così da avere
ypx0 ` hq “ upx0 ` hq “ y0 ` hsÿ
i“1
ki
ż 1
0liptq dt “ y0 ` h
sÿ
i“1
biki.
Un altro modo per ottenere un metodo di Runge-Kutta da un meto-do di collocazione di coefficienti tciui“1,...s è, dopo aver notato che il po-linomio pptq “ tk´1 si può scrivere usando i polinomi di Lagrange comepptq “
řsi“1 ck´1
i liptq (essendo ppciq “ ck´1i ), riscrivere le (3.5) sommando
rispettivamente sulle j e sulle i, ottenendo il sistema lineare nelle ai j e bi
sÿ
j“1
ai jck´1j “
ż ci
0
sÿ
j“1
l jptqck´1j dt “
ż ci
0tk´1 dt “
cki
k, k “ 1, . . . , s, @i, (3.6)
sÿ
i“1
bick´1i “
ż 1
0liptqck´1
i dt “ż 1
0tk´1 dt “
1k, k “ 1, . . . , s. (3.7)
L’equazione (3.7) in particolare, quando valida per k ď p, con p tale ches ă p ď 2s, può essere interpretata come ”ereditata“ da un metodo di col-locazione con un numero maggiore di punti. In altre parole ci dà unacondizione sufficiente perché il metodo di collocazione (e quindi anche ilrelativo metodo di Runge-Kutta) abbia ordine p.
Nelle simulazioni che mostreremo abbiamo scelta come tciui“1,...,s i nodidi Gauss, ovvero gli zeri del s_esimo polinomio di Legendre traslato
ds
dxspxspx´ 1qsq .

3.4. METODI SIMPLETTICI 31
3.4
Metodi simplettici
Nel caso privo di viscosità e termine forzante, l’equazione barotropicaquasi-geostrofica descrive un sistema hamiltoniano che, come abbiamovisto, ammette integrali primi.
Queste quantità , seppur non più costanti se nell’evoluzione entranoin gioco dissipazione e forzanti esterne, sono comunque significative perdescrivere la dinamica del sistema.
La scelta dello schema numerico con cui integrare l’equazione nonè più quindi solo condizionata dalla vicinanza della soluzione trovata aquella analitica, ma anche dall’esigenza di conservare le caratteristichegeometriche del modello. In altre parole vorremmo che, integrando unsistema hamiltoniano mediante un solutore numerico, anche il sistemaapprossimato che otterremo sia hamiltoniano.
La classe di solutori che condivono questa peculiarità , ovvero le mappeiterative tali che ppn`1, qn`1q “ Φppn, qnq che siano anche canoniche sono gliintegratori simplettici. Per essi si dovrà avere, seguendo la teoria delletrasformazioni canoniche ed indicando con Id la matrice unità in Rd,
∇Φt J∇Φ “ J, con J “
˜
0 Id
´Id 0
¸
ovveroˆ
Bppn`1, qn`1q
Bppn, qnq
˙t
Jˆ
Bppn`1, qn`1q
Bppn, qnq
˙
“ J. (3.8)
così da passare da un sistema in ppn, qnq per cui
9pn “ ´BqnHppn, qnq, 9qn “ BpnHppn, qnq
ad un sistema in ppn`1, qn`1q per cui
9pn`1 “ ´Bqn`1Kppn`1, qn`1q, 9qn`1 “ Bpn`1Kppn`1, qn`1q

32 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
essendo K l’hamiltoniana H nelle nuove variabili.
Le cose si semplificano prendendo come Φ un’evoluzione del sistema,o più precisamente una sua approssimazione. In altre parole, sia ϕtpxq lasoluzione del sistema hamiltoniano
9x “ J´1∇Hpxq, con x “ pp, qq.
La mappa y “ ϕhpxq corrispondente ad un’evoluzione di un tempo hè canonica e quindi manda un sistema hamiltoniano in se stesso, mante-nendo invariata l’hamiltoniana. In altre parole, essendo yptq “ xpt ` hqabbiamo
9yptq “ 9xpt` hq “ J´1∇Hpxpt` hqq “ J´1
∇Hpyptqq.
Gli schemi numerici che abbiamo visto fin qui non hanno, in generale,questa proprietà . Un esempio di quanto detto si può fare però con unaversione simplettica del metodo di Eulero. Vale infatti il seguente teorema.
Teorema 3.4.1 (de Vogelaere, 1956). I metodi di Eulero simplettici definitida
pn`1 “ pn ´ hBqHppn`1, qnq,
qn`1 “ qn ` hBpHppn`1, qnq,(3.9)
e da
pn`1 “ pn ´ hBqHppn, qn`1q,
qn`1 “ qn ` hBpHppn, qn`1q,(3.10)
sono metodi simplettici di ordine 1.
Dimostrazione. Dimostriamo la tesi per il primo metodo, valendo per ilsecondo considerazioni analoghe.

3.4. METODI SIMPLETTICI 33
Derivando (3.9) rispetto a ppn, qnq otteniamo
˜
Id ` hB2pqH 0
´hB2ppH Id
¸
ˆ
Bppn`1, qn`1q
Bppn, qnq
˙
“
˜
Id ´hB2qqH
0 Id ` hB2pqH
¸
. (3.11)
Dato che la condizione (3.8) si può scrivere come
ˆ
Bppn`1, qn`1q
Bppn, qnq
˙´1
J´1ˆ
Bppn`1, qn`1q
Bppn, qnq
˙´t
“ J´1
ovveroˆ
Bppn`1, qn`1q
Bppn, qnq
˙
J´1
ˆ
Bppn`1, qn`1q
Bppn, qnq
˙t
“ J´1
ed essendo, da (3.11)
˜
Id ` hB2pqH 0
´hB2ppH Id
¸
ˆ
Bppn`1, qn`1q
Bppn, qnq
˙
J´1
ˆ
Bppn`1, qn`1q
Bppn, qnq
˙t˜
Id ` hB2pqH 0
´hB2ppH Id
¸t
“
“
˜
Id ´hB2qqH
0 Id ` hB2pqH
¸
J´1
˜
Id ´hB2qqH
0 Id ` hB2pqH
¸t
,
la simpletticità del metodo segue dall’immediata verifica di
˜
Id ´hB2qqH
0 Id ` hB2pqH
¸
J´1
˜
Id ´hB2qqH
0 Id ` hB2pqH
¸t
“
“
˜
Id ` hB2pqH 0
´hB2ppH Id
¸
J´1
˜
Id ` hB2pqH 0
´hB2ppH Id
¸t
.
Per quanto riguarda la stima sulla velocità di convergenza abbiamo,ricordando che l’hamiltoniana H è di classe C2 e che le funzioni pptq e qptq

34 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
sono di classe C1, ed avendo posto p0 “ ppt0q,
|ppt0 ` hq ´ p1|
h2 “|ppt0 ` hq ´ ppt0q ` hBqHpp1, q0q|
h2
“| 9pptq ` BqHpp0, q0q ` BqHpp1, q0q ´ BqHpp0, q0q|
h
ď|BqHpp, qq ´ BqHpp0, q0q|
h`|BqHpp1, q0q ´ BqHpp0, q0q|
hhÑ0ÝÑ 0
per un opportuno t P rt0, t0`hs ed avendo indicato posto pp, qq “ ppptq, qptqq.Da un’analoga stima per |qpt0 ` hq ´ q1| segue la tesi.
3.5
Metodi di Runge-Kutta simplettici
Un metodo di Runge-Kutta non è in generale simplettico, come non losono ad esempio i metodi di Eulero in avanti o indietro. Possiamo peròdare delle condizioni sui coefficienti che lo definiscono in maniera tale chesia garantita questa proprietà .
Per stabilire queste condizioni, seguiamo l’approccio di [BS94] usandoil seguente lemma.
Lemma 3.5.1. Per metodi di Runge-Kutta i seguenti diagrammi commutano:
9y “ f pyq, yp0q “ y0
Ψ “ByBy0
ÝÝÝÝÝÝÝÑ
#
9y “ f pyq, yp0q “ y0
9Ψ “ f 1pyqΨ, Ψp0q “ I
Runge´Kutta§
§
đ
§
§
đ
Runge´Kutta
tynun ÝÝÝÝÝÝÝÝÑ
Ψn “Byn
By0
tyn,Ψnun
ovvero la soluzione numerica, ottenuta con un metodo di Runge-Kutta, del sistemacomposto da un’equazione in y e dall’equazione per il suo jacobiano rispetto alla

3.5. METODI DI RUNGE-KUTTA SIMPLETTICI 35
condizione iniziale Ψ è uguale alla soluzione numerica yn della sola equazionearricchita dal suo jacobiano Ψn
Dimostrazione. Senza perdita di generalità , dimostriamo per semplicità dicalcolo il lemma per il metodo di Eulero esplicito:
yn`1 “ yn ` h f pynq.
Differenziando entrambi i membri rispetto a y0, ovvero seguendo laseconda freccia orizzontale del diagramma, otteniamo
Byn`1
By0“Byn
By0` h f 1pynq
Byn
By0,By0
By0“ I,
ovvero il metodo di Eulero applicato all’equazione
9Ψ “ f 1pyqΨ, Ψp0q “ I,
da cui la tesi.
Il passo successivo nella caratterizzazione dei metodi di Runge-Kuttasimplettici passa ora per la constatazione che la quantità ∇ΦtJ∇Φ è un’in-tegrale primo quadratico per il sistema aumentato. Si ha infatti dalladefinizione del sistema
ddtp∇ΦtJ∇Φq “
ddtpΨtJΨq
“ 9ΨtJΨ`ΨtJ 9Ψ
“pJ´1∇
2HpyqΨqtJΨ`ΨtJpJ´1∇
2HpyqΨq
“Ψt∇
2HpyqJ´tJΨ`Ψt∇
2HpyqΨ
“0,
essendo J´t “ ´J´1.
Quindi, un metodo di Runge-Kutta che conservi gli invarianti qua-dratici, soddisferà anche la condizione di simpletticità per il problema
36 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
aumentato, e grazie al lemma sarà anche simplettico per il problemaoriginario.
Come già detto in precedenza, nelle simulazioni è stato usato un me-todo di Gauss, ovvero un metodo di Runge-Kutta generato dagli zeri deipolinomi di Legendre mediante le (3.7). Questo metodo risulta, in basealle considerazioni precedenti, essere simplettico. Vale infatti il seguenteteorema.
Teorema 3.5.2. Il metodo di Gauss conserva gli invarianti quadratici.
Dimostrazione. Sia dato un’invariante quadratico per il sistema (3.1), ovve-ro una funzione costante sulle soluzioni del tipo Qpyq “ ytCy per una Csimmetica. Per questa Q varrà quindi
ddx
Qpypxqq “ 2ypxqtC 9ypxq “ 0. (3.12)
Calcolando ora l’incremento nella funzione tra y1 e y0, ricordando chey0 “ upt0q, y1 “ upt0 ` hq abbiamo
Qpy1q ´Qpy0q “
ż x0`h
x0
ddx
Qpupxqq dx
“2ż x0`h
x0
upxqtC 9upxq dx
L’integrale può essere calcolato senza errori usando la formula di quadra-tura di Gauss, che integra precisamente polinomi di grado 2n ` 1 qual èl’integrando, ottenendo
Qpy1q ´Qpy0q “
nÿ
i“0
αi upx0 ` cihqtC 9upx0 ` cihq,
avendo usato la definizione di polinomio di collocazione in (3.4) e la (3.12),da cui la tesi.

3.6. STIME SULL’ERRORE 37
3.6
Stime sull’errore
Come l’equazione (1.19), anche l’equazione (2.5) ammette nel casoconservativo delle quantità conservate, pari a ([Zei04], [Zei91])
tr´´
qlmTpNqlm
¯n,¯
, n “ 1, . . . ,N ´ 1. (3.13)
Tali integrali primi sono legati ai Casimir che abbiamo definito in (1.22).Possiamo infatti usare come collegamento tra gli uni e gli altri i seguentioperatori, definiti rispettivamente su SDi f f pS2q e SUpNq
pv,wq “ż
S2vw “ vlmwl1m1
ż
S2YlmYl1m1 ,
ă V,W ą“ trpVWq “ vlmwl1m1 trˆ
TpNqlm TpNql1m1
˙
.
Dato che ([Zei04], [HY98])
pYlm,Yl1m1q “ δll1δmm1 , ă TpNqlm ,TpNql1m1 ą“ kNδll1δmm1 ,
abbiamo quindi per una q tale che qn“
ÿ
lďl, m
qlmn Ylm
ż
S2qn“
ż
S2qlm
n Ylm
“ kN tr´
qlmn TpNqlm
¯
“ kN tr´
pqlmTpNqlm qn¯
.
Si può così studiare la dinamica del sistema (1.19) facendo uso dell’e-voluzione delle quantità definite in (2.7). Usando (2.6) si vede inoltre chequesti nuovi Casimir rimarranno ad un opN´1q delle rispettive quantitàcalcolate mediante una soluzione dell’equazione (1.19) troncata a l ă N.
Sia infatti q1 una soluzione della (1.19) troncata e q2 una soluzione di

38 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
(2.5). La differenza tra calcolare questi Casimir di dimensione finita conuna soluzione o l’altra comporta un errore pari a
ˇ
ˇ
ˇtr´
pqlm2 TpNqlm q
n¯
´ tr´
pqlm1 TpNqlm q
n¯ˇ
ˇ
ˇ “
ˇ
ˇ
ˇtr´
pqlm2 TpNqlm q
n´ pqlm
1 TpNqlm qn¯ˇ
ˇ
ˇ
ď nˇ
ˇ
ˇtr´
pqlm1 TpNqlm q
n´1¯ˇ
ˇ
ˇ
ˇ
ˇ
ˇtr´
pqlm2 ´ qlm
1 qTpNqlm
¯ˇ
ˇ
ˇ` opqlm2 ´ qlm
1 q “ oˆ
1N
˙
.
(3.14)
Come visto precedentemente, non inficerà l’analisi un’integrazione nu-merica mediante un algoritmo simplettico, nel nostro caso un metodo diRunge-Kutta a 2 nodi (del quarto ordine).
Questo algoritmo ci consentirà di calcolare delle quantità che di nuovorimarranno costanti nel caso conservativo e che, anche in presenza didissipazione e elementi forzanti, bene approssimeranno i Casimir comedefiniti in (2.7).
Si ha infatti per gli integrali primi ĂCn, che ricordiamo sono ottenuti ap-prossimando spazialmente e temporalmente i Cn, essendo q un’eventualesoluzione analitica e qlm
h la sua controparte numerica
ĂCn “ tr´
pqlmh TpNqlm q
n¯
,
“ tr´
pqlmTpNqlm qn¯
` n tr´
pqlmTpNqlm qn´1
¯´
pqlmh ´ qlmqT
pNqlm
¯
` opqlmh ´ qlm
q,
“ tr´
pqlmTpNqlm qn¯
` oph4q.
Concludiamo sottolineando di nuovo la natura dell’approssimazionenumerica che abbia eseguito. La simpletticità infatti, pur dando luogoad un errore, lo fa mantenendo invariata le peculiarità geometriche delproblema; ovvero per quanto sia presente una discrepanza tra i valoriesatti dei Casimir e quelli della soluzione numerica, la loro conservazionenon verrà compromessa.
In altre parole, quando l’evoluzione del sistema potrà essere descrittacome vincolata in varietà date dalla conservazione o dalla predicibilità deivalori dei Casimir, la soluzione numerica sarà costretta in un intorno di

3.6. STIME SULL’ERRORE 39
tale varietà ad una distanza data solamente dall’approsimazione (3.14), edogni studio statistico delle soluzioni analitiche basato su queste quantitàpotrà essere portato avanti facendo uso delle soluzioni numeriche, essendoqueste generate da un solutore simplettico.
Riferimenti bibliografici
La presentazione dei metodi numerici di questo capitolo è stata basatasu [QSS00] e [HLW03], soprattutto quest’ultimo, insieme a [BS94], perquanto riguarda i metodi simplettici.
40 CAPITOLO 3. INTEGRAZIONE IN TEMPO SIMPLETTICA
CAPITOLO 4
Validazione del codice
Vediamo ora i risultati dell’applicazione di quanto presentato nei capi-toli precedenti, ovvero l’integrazione di due operazioni simplettiche sul-l’equazione quasi geostrofica sulla sfera: una riduzione spettrale ed un’in-tegrazione con un metodo di Runge-Kutta simplettico. Mostreremo comeuna tale strategia si sia rivelata efficace nel calcolo di soluzioni numericheche da una parte condividano le proprietà geometriche delle soluzioni ana-litiche, dall’altra permettano di ritrovare fenomeni fisici del sistema che ilmodello descrive.
Presentiamo in questo capitolo ora una serie di test di validazione delcodice usato nelle simulazioni. Le grandezze spaziali e temporali sono stateadimensionalizzate usando rispettivamente il raggio terrestre e l’inversodella velocità angolare. Il metodo di Runge Kutta simplettico usato è statodel 4˝ ordine eseguito con un passo temporale di 10´2 (corrispondentefisicamente a circa 2.5 minuti).
In particolare vorremo che le caratteristiche delle equazioni, conser-vazione di integrali primi e proprietà dinamiche, siano conservate dallesoluzioni numeriche.
41
42 CAPITOLO 4. VALIDAZIONE DEL CODICE
4.1
Conservazione degli integrali primi
Una prima indicazione della bontà del codice usato è la conservazione,in assenza di dissipazione e termine forzante, tanto dell’energia quantodegli n´ 1 Casimir come ci aspettiamo dal teorema 1.4.1.
Test 1: variazioni di energia e Casimir.
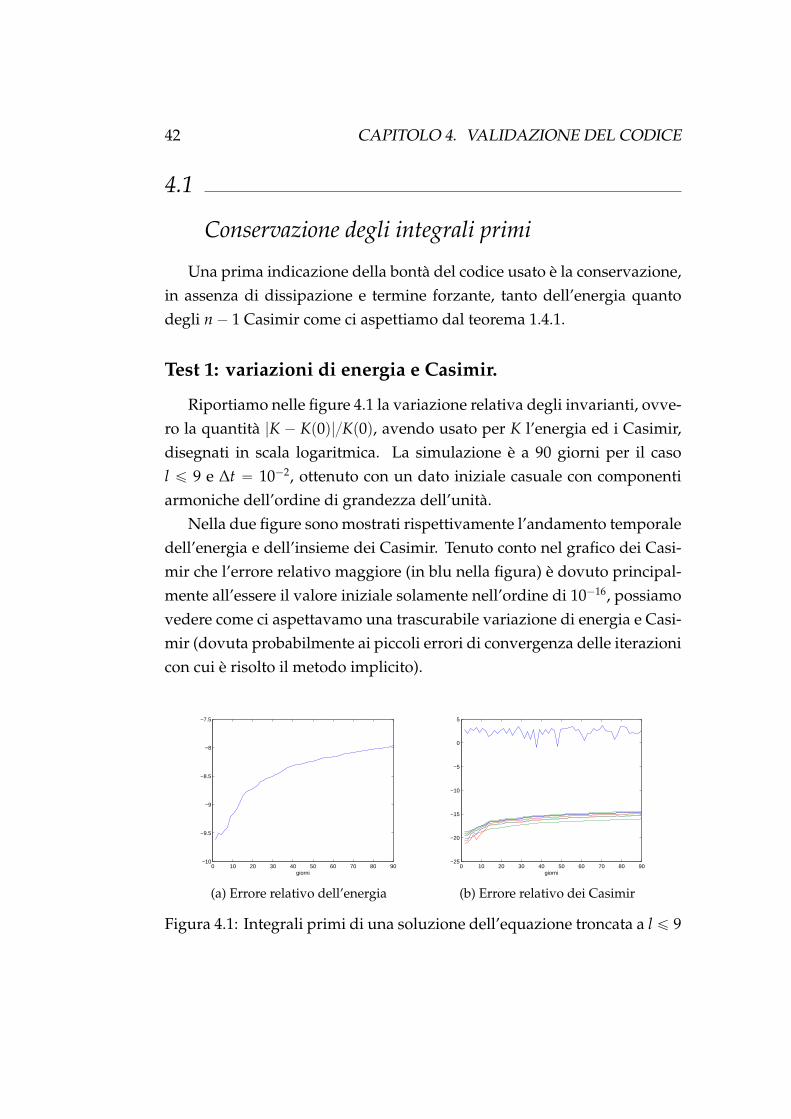
Riportiamo nelle figure 4.1 la variazione relativa degli invarianti, ovve-ro la quantità |K ´ Kp0q|Kp0q, avendo usato per K l’energia ed i Casimir,disegnati in scala logaritmica. La simulazione è a 90 giorni per il casol ď 9 e ∆t “ 10´2, ottenuto con un dato iniziale casuale con componentiarmoniche dell’ordine di grandezza dell’unità.
Nella due figure sono mostrati rispettivamente l’andamento temporaledell’energia e dell’insieme dei Casimir. Tenuto conto nel grafico dei Casi-mir che l’errore relativo maggiore (in blu nella figura) è dovuto principal-mente all’essere il valore iniziale solamente nell’ordine di 10´16, possiamovedere come ci aspettavamo una trascurabile variazione di energia e Casi-mir (dovuta probabilmente ai piccoli errori di convergenza delle iterazionicon cui è risolto il metodo implicito).
0 10 20 30 40 50 60 70 80 90−10
−9.5
−9
−8.5
−8
−7.5
giorni
(a) Errore relativo dell’energia
0 10 20 30 40 50 60 70 80 90−25
−20
−15
−10
−5
0
5
giorni
(b) Errore relativo dei Casimir
Figura 4.1: Integrali primi di una soluzione dell’equazione troncata a l ď 9
4.2. ANTICORRELAZIONE TRA FUNZIONE DI CORRENTE E TOPOGRAFIA43
Test 2: confronto con i solutori MATLAB .
Usare un metodo simplettico è, come ci aspettavamo, un modo affi-dabile per condurre un’analisi su energia e Casimir. Questi infatti nonvengono conservati con altri algoritmi.
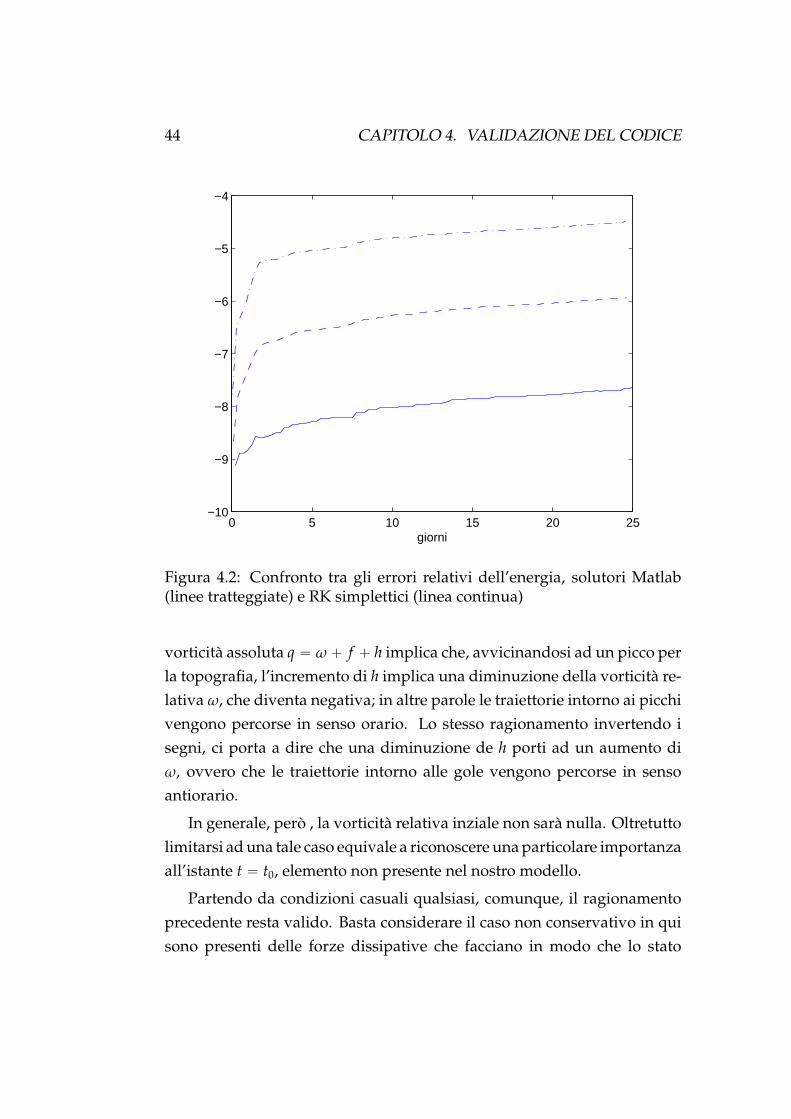
Nella figura 4.2 mostriamo un confronto tra il metodo utilizzato, Runge-Kutta simplettico del quarto ordine, (linea continua) ed i solutori ode45 (li-nea tratteggiata) ed ode15s (linea puntata) implementati da MATLAB che,pur efficenti in bassa dimensione, all’aumentare della soglia di discretizza-zione presentano maggiori errori di conservazione sui Casimir, mentre persoglie basse hanno un funzionamento critico (nei test condotti sono andatispesso fuori disponibilità di memoria).
Le soluzioni sono state calcolate per 25 giorni a partire da una stessacondizione iniziale con componenti nell’ordine dell’unità, con un tronca-mento l ď 4, usando i solutori ode45 ed ode15s, e con tolleranza assoluta erelativa rispettivamente pari a 10´15 e 10´6 per entrambi i solutori. I tempid’esecuzione sono stati (approssimativamente) di 52 per ode15s, di 122 perode45 e di 11342 per Runge-Kutta simplettico.
4.2
Anticorrelazione tra funzione di corrente e topografia
Una delle caratteristiche delle soluzioni analitiche dell’equazione ba-rotropica quasi geostrofica è l’anticorrelazione tra funzione di corrente etopografia.
Questo discende immediatamente dalla legge di conservazione
DqDt
“ 0 (4.1)
che si ha nel caso privo di viscosità e termine forzante.
Supponiamo infatti che sia costante il parametro di Coriolis, e di partireda una condizione iniziale a media nulla per ω. La conservazione della
44 CAPITOLO 4. VALIDAZIONE DEL CODICE
0 5 10 15 20 25−10
−9
−8
−7
−6
−5
−4
giorni
Figura 4.2: Confronto tra gli errori relativi dell’energia, solutori Matlab(linee tratteggiate) e RK simplettici (linea continua)
vorticità assoluta q “ ω` f ` h implica che, avvicinandosi ad un picco perla topografia, l’incremento di h implica una diminuzione della vorticità re-lativa ω, che diventa negativa; in altre parole le traiettorie intorno ai picchivengono percorse in senso orario. Lo stesso ragionamento invertendo isegni, ci porta a dire che una diminuzione de h porti ad un aumento diω, ovvero che le traiettorie intorno alle gole vengono percorse in sensoantiorario.
In generale, però , la vorticità relativa inziale non sarà nulla. Oltretuttolimitarsi ad una tale caso equivale a riconoscere una particolare importanzaall’istante t “ t0, elemento non presente nel nostro modello.
Partendo da condizioni casuali qualsiasi, comunque, il ragionamentoprecedente resta valido. Basta considerare il caso non conservativo in quisono presenti delle forze dissipative che facciano in modo che lo stato
4.3. EVOLUZIONE DI UN DATO INIZIALE BIANCO 45
a media nulla per q diventi ora uno stato asintotico. L’anticorrelazioneche prima avevamo in ogni istante, diventa perciò ora una tendenza delsistema.
Test 3: confronto funzione di corrente/topografia
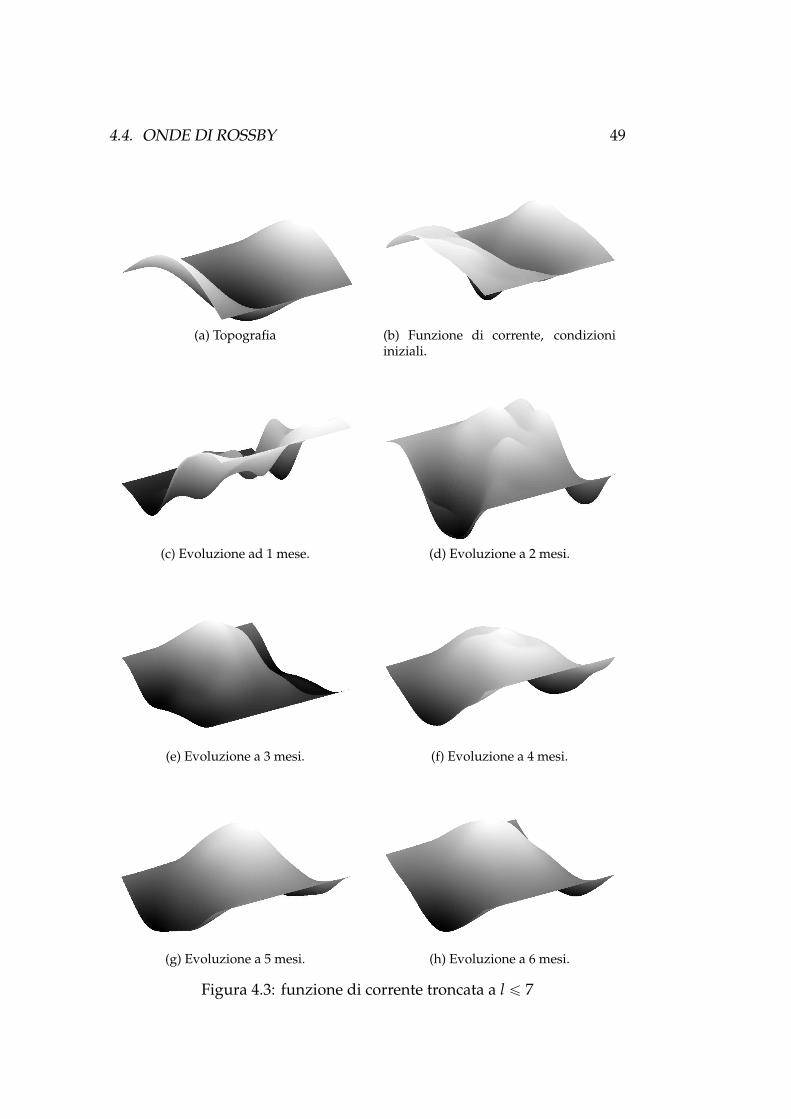
Mostriamo in questo test una simulazione della soluzione del proble-ma troncato a l ď 7. La topografia è rappresentata nella prima figura ecorrisponde a 100pY1,´1 ´ Y1,1q, la condizione casuale è casuale con com-ponenti armoniche dell’ordine di grandezza di 10´1 e si è usata solamenteuna dissipazione di iperviscosità relativa a k2 “ 10´4. L’evoluzione è stataportata avanti per 6 mesi, in modo da rendere visibile la tendenza asin-totica della funzione di corrente. La simulazione che segue in figura 4.3mostra chiaramente come la funzione di corrente tenda ad assumere valorianticorrelati alla topografia, in modo crescente al crescere dei tempi.
4.3
Evoluzione di un dato iniziale bianco
Questo test (proposto in [BR05]) utilizza il modello non viscoso con undato iniziale “bianco”, ovvero con un contenuto di energia equidistribuitotra i vari livelli armonici.
In presenza di diffusione, sono presenti meccanismi di trasporto dienergia tra i vari livelli spettrali. La dissipazione infatti è stata modellizzatausando il laplaciano, e trovandoci nello spazio delle armoniche sferiche,vale la relazione
∆ Ylm “ ´lpl` 1qYlm,
la dissipazione varia fortemente con l’indice l e toglie energia alle compo-nenti armoniche più alte. Questo non avviene nel caso conservativo, incui il contributo all’energia delle componenti della soluzione qlm con l “ ltende ad oscillare attorno ad un valore medio.

46 CAPITOLO 4. VALIDAZIONE DEL CODICE
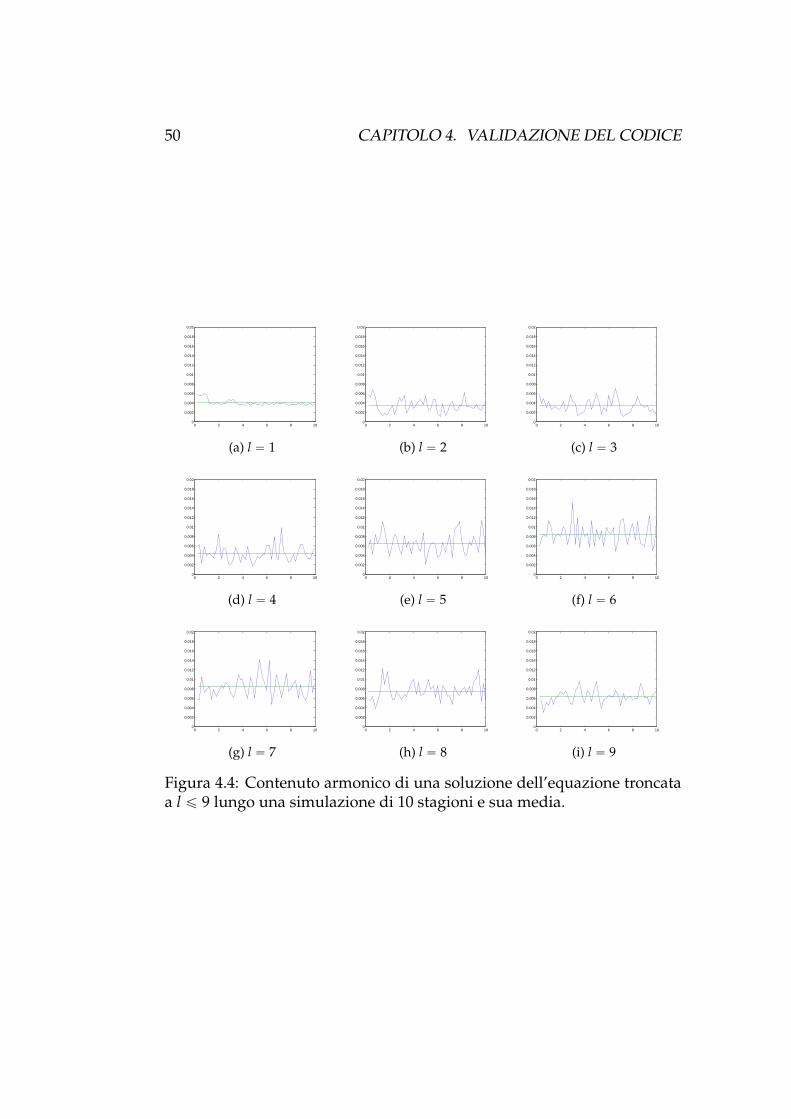
Test 4: dato iniziale bianco
In figura 4.4 sono mostrati gli apporti all’energia di ciascun livellospettrale, relativamente ad una soluzione della lunghezza di 20 giorni, didato iniziale bianco e nell’ordine dell’unità. Come previsto teoricamente ivalori dell’energia oscillano attorno ad un valor medio circa costante.
4.4
Onde di Rossby
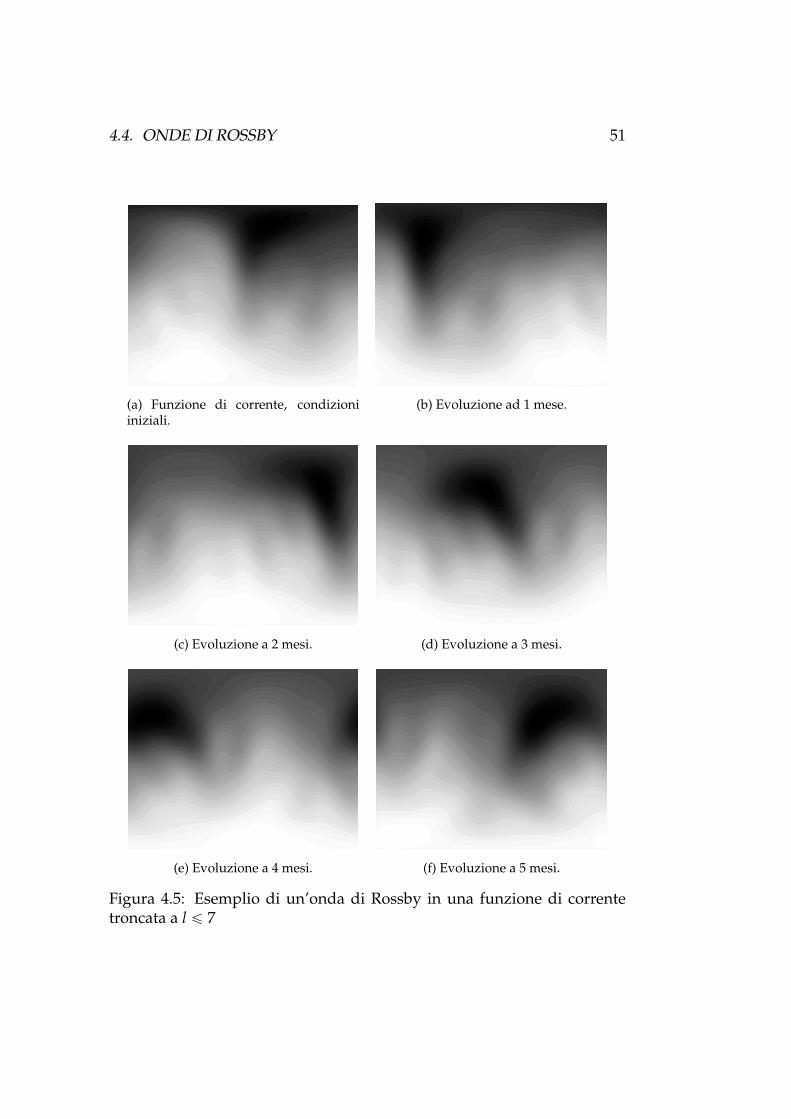
Tra i fenomeni che ci aspettiamo di trovare nelle soluzioni che siamoandati a costruire ci sono le onde di Rossby. Questo tipo di onde si verifi-cano perturbando moti westerly (ovvero di direzione ovest-est) attorno aduna loro posizione di equilibrio stazionario.
Supponiamo che la topografia sia nulla e che siano trascurabili dissipa-zione e immissione di energia dall’esterno, e che una traiettoria verso estvenga deviata verso nord. Il moto coinvolgerà quindi una regione in cuila vorticità planetaria, ovvero il parametro f , è maggiore.
Possiamo ricorrere di nuovo all’equazione di conservazione (4.1); au-mentando perciò la vorticità planetaria dovrà diminuire quella relativaω.
Deviare verso nord intorno ad un moto westerly significa ”muover-si in senso antiorario“, quindi la corrispondente traiettoria avrà vorticitàrelativa positiva. Quando questa, per i motivi detti, viene a diminuirefino a diventare negativa, il moto al contrario si rivolgerà verso sud. Latraiettoria si troverà quindi in un’area a vorticità planetaria minore del va-lore all’equilibrio, che genererà questa volta un incremento nella vorticitàrelativa, e così via.
Ovviamente questo tipo di onde avvengono solo intorno a moti wester-ly. Deviare verso nord vicino ad un moto easterly significherebbe infattiora avere vorticità relativa negativa e muoversi in una posizione che neinduce un’ulteriore diminuzione (e viceversa per moti verso sud). In altre
4.4. ONDE DI ROSSBY 47
parole, intorno a moti easterly deviazioni verso nord o verso sud vengonorafforzate dalla conservazione della vorticità assoluta.
Test 5: generazione di onde di Rossby
In figura 4.5 mostriamo una simulazione in cui abbiamo usato condi-zioni iniziali relative ad un flusso westerly con profilo perturbato, e chepresenta un trasporto delle celle verso ovest. Le figure rappresentano statia distanza tre mesi l’uno dall’altro, in assenza di topografia, dissipazionee forzante esterna.
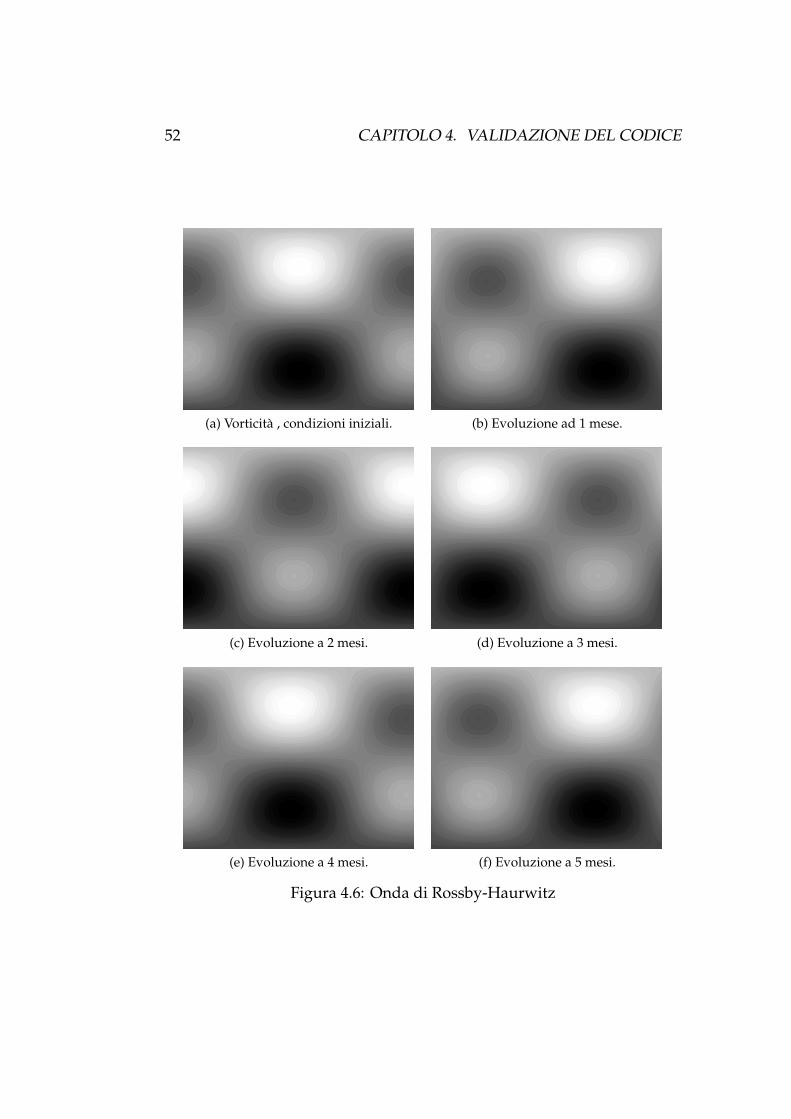
Test 6: onda di Rossby-Haurwitz
Le onde di Rossby-Haurwitz sono tra le soluzione analitiche dell’e-quazione della vorticità barotropica sulla sfera ([Hau40]), ma sono con-siderate un benchmark importante anche in altri modelli di circolazioneglobale. Seguendo uno dei test suggeriti da Williamson in [WDH`92] ab-biamo ricercato questa soluzione con il nostro codice. Quest’onda ha comecondizione iniziale per la funzione di corrente
ψ “ ´a2Ω cosθ` a2K sinR θ sinθ cospRϕq,
la cui corrispondente vorticità è
q “ 2Ω cosθ´ pR2` 3R` 2qK sinR θ cosθ sinpRϕq,
essendo R il raggio della sfera e Ω la velocità angolare. Tale soluzioneprovoca il trasporto rigido della condizione iniziale in direzione est-ovest,ed è stata fedelmente ritrovata dai test, come si può vedere in 4.6

48 CAPITOLO 4. VALIDAZIONE DEL CODICE
Riferimenti bibliografici
I test sulla conservazione degli invarianti sono stati suggeriti dalle leggidi conservazione già citate.
La trattazione sull’anticorrelazione tra topografia e funzione di correntee le onde di Rossby si è basata su [Ped87], mentre ulteriori dettagli sull’ondadi Rossby-Haurwitz sono presenti in [Hau40] e [WDH`92].
4.4. ONDE DI ROSSBY 49
(a) Topografia (b) Funzione di corrente, condizioniiniziali.
(c) Evoluzione ad 1 mese. (d) Evoluzione a 2 mesi.
(e) Evoluzione a 3 mesi. (f) Evoluzione a 4 mesi.
(g) Evoluzione a 5 mesi. (h) Evoluzione a 6 mesi.
Figura 4.3: funzione di corrente troncata a l ď 7
50 CAPITOLO 4. VALIDAZIONE DEL CODICE
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(a) l “ 1
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(b) l “ 2
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(c) l “ 3
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(d) l “ 4
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(e) l “ 5
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(f) l “ 6
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(g) l “ 7
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(h) l “ 8
0 2 4 6 8 100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
(i) l “ 9
Figura 4.4: Contenuto armonico di una soluzione dell’equazione troncataa l ď 9 lungo una simulazione di 10 stagioni e sua media.
4.4. ONDE DI ROSSBY 51
(a) Funzione di corrente, condizioniiniziali.
(b) Evoluzione ad 1 mese.
(c) Evoluzione a 2 mesi. (d) Evoluzione a 3 mesi.
(e) Evoluzione a 4 mesi. (f) Evoluzione a 5 mesi.
Figura 4.5: Esemplio di un’onda di Rossby in una funzione di correntetroncata a l ď 7
52 CAPITOLO 4. VALIDAZIONE DEL CODICE
(a) Vorticità , condizioni iniziali. (b) Evoluzione ad 1 mese.
(c) Evoluzione a 2 mesi. (d) Evoluzione a 3 mesi.
(e) Evoluzione a 4 mesi. (f) Evoluzione a 5 mesi.
Figura 4.6: Onda di Rossby-Haurwitz

CAPITOLO 5
Clusterizzazione dei dati
La estrazione di informazioni dai dati (di natura essenzialmente cao-tica) generati dalle simulazioni effettuate è un problema che va gestito inmaniera accurata. In questo capitolo descriviamo un possibile approccio,orientato alla individuazione di regimi climatici, che tenta di tener contosia delle peculiarità geometriche del sistema che delle approssimazioneintrodotte sia in fase di raccolta dei dati sperimentali che negli algoritminumerici e nell’implementazione su un calcolatore.
5.1
Caoticità del sistema
Come abbiamo accennato in precedenza, il modello è di natura caotica.Ciò significa che due differenti istanti iniziali, per quanto vicini, possonodare vita ad evoluzioni non solo estremamente lontane da un punto divista quantitativo, ma anche dai comportamenti globali molto diversi.Essendo la misura di dati iniziali per sua natura approssimata, il tentativodi prevedere il valore che la soluzione viene ad assumere ad un dato istante
53
54 CAPITOLO 5. CLUSTERIZZAZIONE DEI DATI
di tempo non è più, quindi, molto rilevante ai fini dell’interpretazione deidati forniti dal modello.
In climatologia, del resto, non ha particolare importanza il valore dellesingole grandezze. Può essere utile invece individuare quelli che posso-no intuitivamente essere riconosciuti come regimi climatici. Definire consufficiente formalità cosa sia un regime non è però così immediato. Treprincipali criteri usati nel corso degli scorsi decenni per definire regimiclimatici sono stati:
• configurazioni che si ripetano nel tempo (configurazioni ricercatevalutando distribuzioni di probabilità sugli stati del sistema o aposteriori attraverso cluster nello spazio delle fasi);
• configurazioni che manifestino una buona persistenza in tempo;
• configurazioni che che manifestino una quasi stazionarietà. Più pre-cisamente quest’ultima proprietà sta a significare una stazionarie-tà statistica delle configurazioni, nel senso che la media degli statiassunti tenda ad essere costante.
L’ottica è la stessa utilizzata da Lorenz in [Lor63], delle cui equazioniè tracciata una traiettoria nella figura 5.1. Il sistema da descrivere è inquesto caso quello dell’esperimento di Raleigh-Bénard, in cui un fluidocontenuto in un cilindro in rotazione attorno al proprio asse è a contattosulle due facce con due termostati a temperature differenti. Anche questosistema manifesta come il nostro una dipendenza sensibile dai dati iniziali;nonostante ciò le traiettorie delle soluzioni non hanno un comportamentototalmente disorganizzato: queste infatti tendono sempre ad avvicinarsiad una delle due falde di un insieme “a farfalla”, che possiamo intuire dalgrafico, ed a passare col tempo dall’una all’altra. Avendo l’appartenenzaad ognuno dei due insiemi anche un significato fisico (in particolare, adognuno corrisponde un diverso segno della vorticità), si possono quindidescrivere molto macroscopicamente le soluzioni mediante la loro posi-zione relativamente alle falde o alla probabilità (deterministica) di passaredopo un certo lasso di tempo da una falda all’altra.

5.1. CAOTICITÀ DEL SISTEMA 55
−20
0
20
−30−20−1001020300
5
10
15
20
25
30
35
40
45
50
xy
z
Figura 5.1: L’attrattore di Lorenz
La scelta che abbiamo fatto nella ricerca dei regimi è di associarli acluster di dati che individueremo a posteriori dai risultati delle simulazioni,ottenute come abbiamo visto in maniera simplettica dalle equazioni (questaproprietà geometrica sembrerebbe garantire una migliore aderenza alleproprietà statistiche del sistema originale).
Il passo successivo sarà inquadrare tutti questi strumenti per poteresprimere previsioni quanto più accurate possibile riguardo le possibilitransizioni da un regime climatico all’altro. Nei nostri termini questosignifica cercare, dopo aver individuato i regimi nello spazio delle fasi, dicostruire una catena di Markov. In altre parole, mediante i cluster definireuna suddivisione dello spazio delle fasi, attraverso la quale descrivere ladinamica del sistema in termini del tempo di permanenza in un cluster edella probabilità di transizione tra un cluster ed un altro.

56 CAPITOLO 5. CLUSTERIZZAZIONE DEI DATI
5.2
Costruzione della clusterizzazione
La clusterizzazione è una tecnica di analisi multivariata consistentenella classificazione di un insieme di dati a seconda dell’appartenenza acluster, costruiti a posteriori a partire dai dati stessi.
Nel nostro caso useremo una strategia di clusterizzazione agglomerativae gerarchica. L’essere agglomerativa indica la direzione in cui procedel’algoritmo, costruendo insiemi a partire da oggetti (dati o altri insiemi)vicini tra di loro, a differenza di metodi divisivi in cui, a partire dai cluster,si costruiscono via via ”sotto-cluster“ mediante una scissione, fino ad unasoglia di elementi minimi raggiunta la quale si ferma l’iterazione. Questoaccorpamento avviene mediante una legge di correlazione che permettequindi dicostruire cluster che racchiudano punti nello spazio delle fasi,o altri cluster. A seconda della metrica che sceglieremo per misurarela correlazione tra i punti e la distanza tra i vari cluster (e che dovràdipendere dalla natura della distrubuzione dei dati stessi per una buonaefficacia della suddivisione) avremmo una struttura gerarchica (da qui laseconda denominazione) differente, sul tipo del dendrogramma in figura5.2.
Definita in questo modo la gestione dei dati, si può procedere ad unaclusterizzazione in funzione del numero massimo di cluster che vogliamoavere oppure di valori di soglia che permettano di esprimere quando dueoggetti siano “vicini” o “lontani”.
Qeust’ultimo criterio va inteso nel modo seguente. Supponiamo diaver suddiviso il nostro insieme di dati in k cluster Di, per i “ 1, . . . , k,ognuno avente un numero ni di elementi, e sia Ci il baricentro o centroidedell’i_esimo cluster, ovvero
Ci “1ni
ÿ
xPDi
x.
Cercare dei parametri che esprimano descrivano l’appartenenza o meno
5.2. COSTRUZIONE DELLA CLUSTERIZZAZIONE 57
0
1
2
3
4
5
Figura 5.2: Esempio di un dendrogramma
di due elementi allo stesso insieme significa stabilire due valori r1 ed r2 taliche
corrpCi, xq ě r1, @x P Ci, @i
corrpCi,C jq ď r2, @i , j.
Dopo aver creato questi insiemi, risulta opportuno per rendere signi-ficativa l’analisi definire tre cluster speciali: uno in cui racchiudere tuttii punti a poca distanza dall’origine, uno costituito dai cluster più piccolied uno che contiene i punti non abbastanza correlati con alcun centro dapoter appartenere ad un cluster e non abbastanza scorrelati da almeno uncentroide per poter costituire un cluster a sé, ovvero per cui valga
#
corrpCi, xq ă r1, @ i,corrpCi, xq ą r2, almeno per un i.

58 CAPITOLO 5. CLUSTERIZZAZIONE DEI DATI
5.3
Qualche test preliminare
Mostriamo ora nelle prossime simulazioni come la clusterizzazione deivalori assunti dalla soluzione può permetterci di individuare delle confi-gurazioni della funzione di corrente riconducibili a regimi climatici. Nellostudio dei regimi, può essere interessante individuare condizioni per leeventuali transizioni tra un cluster e l’altro, ad esempio in corrispondenzadi determinate soglie dell’energia o dei Casimir.
Le simulazioni finora eseguite sono state portate avanti in dimensionebassa, e ciò a causato che i fenomeni di dissipazione non fossero equilibraticon termini forzanti esterni come invece, ovviamente, è nella realtà. Pergenerare soluzioni non banali, quali ad esempio l’assunzione di uno statostazionario dopo un breve transiente, e per evitare eccessive immissionidi energia nel sistema, sono stati perciò riscalati a posteriori gli ordinidi grandezza dei parametri di dissipazione e di sorgente, con un lavoropiuttosto lungo di aggiustamento. Ciò ha permesso di osservare (almenomatematicamente) l’instaurarsi di regimi climatici anche in dimensione ditroncamento bassa, a discapito però del realismo dei parametri fisici.
Come base di partenza si è seguito [Sel95] per la dissipazione, ovveroper il termine di diffusione k1 un valore relativo ad un e-folding timeper la vorticità di 15 giorni, per il termine di iperdiffusione k2 un valorecorrispondente ad un e-folding time di 3 giorni per le armoniche l “ 21.
Come detto sopra, il calcolo dei cluster è stato eseguito in tre passi:
1. calcolo delle distanze tra i dati;
2. costruzione di un dendrogramma che colleghi in maniera gerarchicaoggetti vicini, che siano dati, coppie di dati, o insiemi di dati piùnumerosi;
3. costruzione dei cluster troncando il dendrogramma ad un’altezzarelativa ad un dato valore di soglia o ad un numero massimo dicluster.

5.3. QUALCHE TEST PRELIMINARE 59
Nelle clusterizzazioni che seguono, sono stati intoltre filtrati i clusterpiù piccoli, che vanno a costituire il cluster di indice 0.
In figura 5.3 è rappresentata una simulazione a 20 stagioni troncata al ă 2, in cui si è usato un termine forzante fisso relativo ad un irraggiamentomedio invernale ricavato da Franzke in [FMVE04] aumentato di un fattoredi 108, mentre k1 e k2 sono stati riscalati con con coefficienti nell’ordinerispettivamente di 10´2 e 103. La condizione del test in figura è statagenerata in maniera casuale ed è nell’ordine di 10´1.
Nonostante non sia presente alcuna periodicità, si può vedere dal grafi-co della velocità come questi cluster possano essere associati alcuni regimiclimatici. In molti dei test eseguiti, la transizione tra un cluster e l’altropuò essere spesso associata ad opportune soglie dell’energia totale.
In figura 5.3 mostriamo invece una simulazione a 10 troncata a l ă 4.Questa volta il termine forzante è variabile, e segue un semplice andamentocome quello mostrato in figura 5.4, dell’ordine di grandezza di 10´1. Icoefficenti k1 e k2 mantengono lo stesso ordine di grandezza, e sono statiaumentati rispettivamente di 2 e 5 volte. La condizione iniziale, di nuovocasuale, ha ordine di grandezza pari ad 1.
In figura 5.7 mostriamo i Casimir delle due precedenti soluzioni. So-prattutto nella simulazione a forzante variabile, in cui i cluster vengonoriattraversati periodicamente, si può notare una correlazione tra i valoridel Casimir ed il passaggio da un cluster all’altro.
Riferimenti bibliografici
L’esperimento di Lorenz e la sua analisi sono descritti in [Lor63].
Il problema delle diverse definizioni di regime è approfondito in [CJ88]e [MVL88]. In [KG92a], [KG92b], [CW07] e [CRGR`05]) si è usata la stimadi densità di probabilità sullo spazio delle fasi per definire configurazio-

60 CAPITOLO 5. CLUSTERIZZAZIONE DEI DATI
ni, mentre si è optato per individuazioni a posteriori di configurazionimediante clustering in ([MG88], [SIG99], [CW91]. Esempi di studi dellapermanenza nel tempo e sulla quasi stazionarietà di strutture si possonotrovare rispettivamente in [DG83] e [VL88].
Ulteriori dettagli sulla clusterizzazione e loro applicazioni si posso-no trovare ad esempio in [MG88] e [SIG99], [FKS`07], [CJ88], [KG92a],[KG92b], [KRG05].
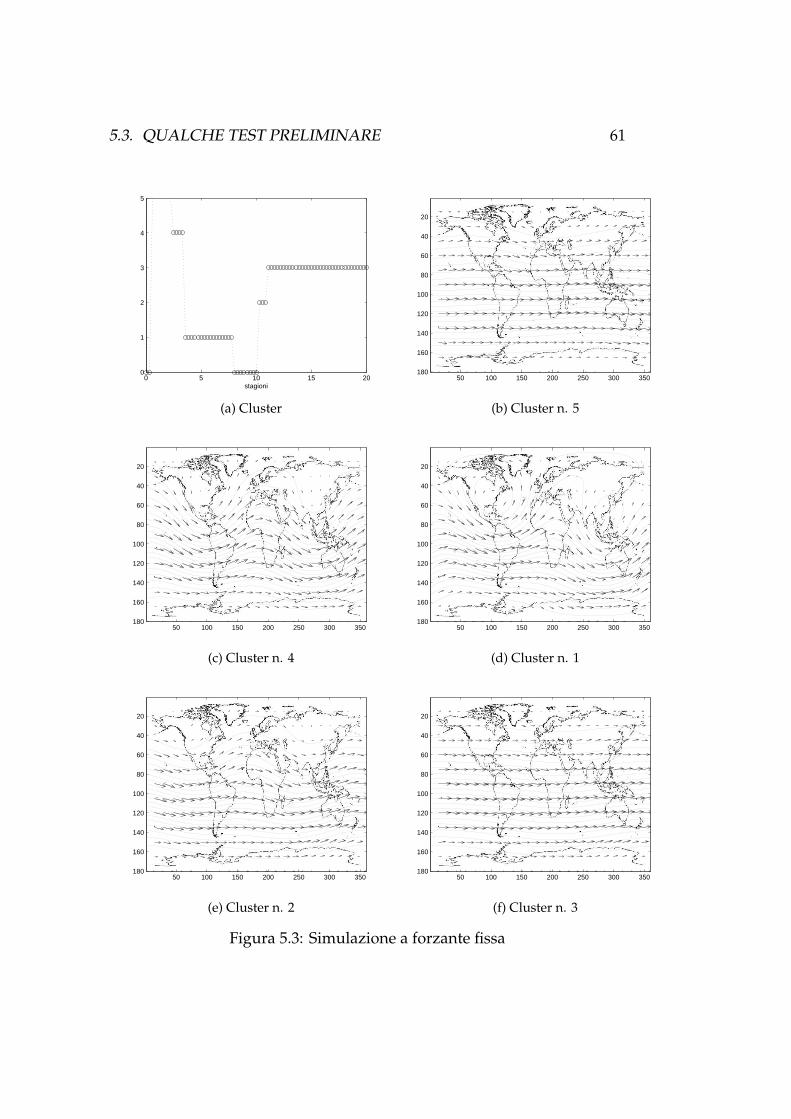
5.3. QUALCHE TEST PRELIMINARE 61
0 5 10 15 200
1
2
3
4
5
stagioni
(a) Cluster
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(b) Cluster n. 5
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(c) Cluster n. 4
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(d) Cluster n. 1
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(e) Cluster n. 2
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(f) Cluster n. 3
Figura 5.3: Simulazione a forzante fissa
62 CAPITOLO 5. CLUSTERIZZAZIONE DEI DATI
(a) Solstizio d’inverno
(b) Equinozio
(c) Solstizio d’estate
Figura 5.4: Forzante variabile

5.3. QUALCHE TEST PRELIMINARE 63
0 2 4 6 8 100
1
2
3
4
anni
clus
ter
(a) Cluster
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(b) Cluster n. 3
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(c) Cluster n. 1
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(d) Cluster n. 4
50 100 150 200 250 300 350
20
40
60
80
100
120
140
160
180
(e) Cluster n. 2
Figura 5.5: Simulazione a forzante variabile
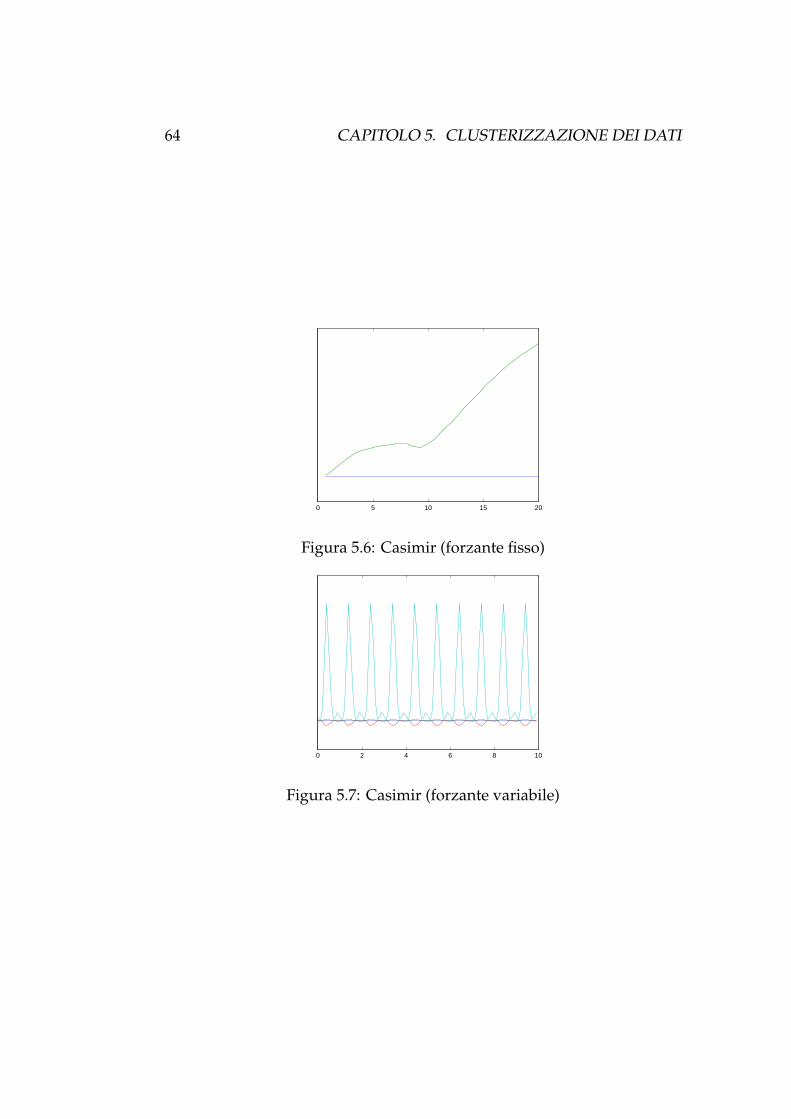
64 CAPITOLO 5. CLUSTERIZZAZIONE DEI DATI
0 5 10 15 20
Figura 5.6: Casimir (forzante fisso)
0 2 4 6 8 10
Figura 5.7: Casimir (forzante variabile)
Bibliografia
[AM88] R. V. Abramov and A. J. Majda. Discrete approximations withadditional conserved quantities: deterministic and statisticalbeahaviour. Methods and Applications of Anaysis, 1988.
[BR05] L. Bonaventura and T. Ringler. Analysis of discrete shallow-water models on geodesic delaunay grids with C-Typestaggering. Monthly Weather Review, 133, 2005.
[BR06] T. J. Bridges, 1, and S. Reich. Numerical methods for hamil-tonian PDEs. Journal of Physics A: mathematical and general, 39,2006.
[BS94] P. B. Bochev and C. Scovel. On quadratic invariants andsymplectic structure. BIT Numerical Mathematics, 34, 1994.
[CG06] Jean-Yves Chemin and Isabelle Gallagher. On the global well-posedness of the 3-d Navier-Stokes equations with large ini-tial data. Annales Scientifiques de l’École Normale Supérieure, 39,2006.
65

66 BIBLIOGRAFIA
[CG09] Jean-Yves Chemin and Isabelle Gallagher. Wellposedness andstability results for the Navier-Stokes equations in R3. Annalesde l’Institut Henri Poincare (C) Non Linear Analysis, 26, 2009.
[CHM`06] C. Canuto, Hussaini, M.Y., A. Quarteroni, and Th.A. Zang.Spectral Methods. Springer, 2006.
[CJ88] B. Cholaw and Liren J. The ocean- atmosphere coupledregimes and east asian winter monsoon (EAWM) activity.Advances in Atmospheric Sciences, 16, 1988.
[CRGR`05] C. Casty, C. C. Raible, J. F. González-Rouco, A. Weishei-mer, E. Xoplaki, J. Luterbacher, K. Dethloff, and H. Wan-ner. Recurrent climate winter regimes in reconstructed andmodelled 500 hpa geopotential height fields over the northatlantic/european sector 1659 - 1990. Climate Dynamics, 24,2005.
[CSYT08] Chiun-Chuan Chen, Robert M. Strain, Horng-Tzer Yau, andTai-Peng Tsai. Lower bound on the blow-up rate of the axisym-metric Navier-S equations. International Mathematics ResearchNotices, 2008, 2008.
[CW91] X. Cheng and J. M. Wallace. Cluster analysis of the northernhemisphere wintertime 500h-Pa high filed: spatial patterns.Journal of Atmospheric Sciences, 50, 1991.
[CW07] J. H. Casola and J. M. Wallace. Identifying weather regimesin the wintertime 500-hPa geopotential height field for thepacific-north american sector using a limited- contour cluste-ring technique. Journal of Applied Meteorology and Climatology,46, 2007.
[DG83] R. M. Dole and N. D. Gordon. Persistent anomalies of the ex-tratropical northern hemisphere wintertime circulation: Geo-graphical distribution and regional persistence characteristics.Monthly Weather Review, 11, 1983.
BIBLIOGRAFIA 67
[FK64] Hiroshi Fujita and Tosio Kato. On the Navier-Stokes initialvalue problem. I. Archive for Rational Mechanics and Analysis,16, 1964.
[FKS`07] D. R. Fereday, J. R. Knight, A. A. Scaife, C. K. Folland,and A. Philipp. Cluster analysis of North Atlantic-Europeancirculation types and links with tropical Pacific sea surfacetemperatures. Journal of Climate, 21, 2007.
[FMVE04] M. Franzke, A. J. Majda, and E. Vanden-Eijnden. Low-orderstochastic mode reduction for a realistic barotropic modelclimate. Journal of Atmospheric Sciences, 62, 2004.
[Hau40] B. Haurwitz. The motion of atmospheric disturbances on thespherical earth. Journal of Marine Research, 3, 1940.
[HLW03] E. Hairer, C. Lubich, and G. Wanner. Geometric numericalintegration. In Frontiers in Numerical Analysis, pages 199–240.Springer Berlin Heidelberg, 2003.
[Hop82] J. Hoppe. Quantum Theory of a massless relativistic surface and atwo- dimensional bound state problem. PhD thesis, MassachusettsInstitute of Technology, 1982.
[Hop89] J. Hoppe. Diffeomorphism groups, quantization and SUp8q.International Journal of Modern Physics A, 04, 1989.
[HY98] J. Hoppe and Shing-Tung Yau. Some properties of matrixharmonics on S2. Communications in Mathematical Physics, 195,1998.
[KG92a] M. Kimoto and M. Ghil. Multiple flow regimes in northernhemisphere winter. part I: Methodology and hemisphericregimes. Journal of the Atmospheric Sciences, 50, 1992.
[KG92b] M. Kimoto and M. Ghil. Multiple flow regimes in northernhemisphere winter. part II: Sectorial regimes and preferredtransitions. Journal of the Atmospheric Sciences, 50, 1992.
68 BIBLIOGRAFIA
[KRG05] S. Krastov, A. W. Robertson, and M. Ghil. Multiple regimesand low-frequency oscillations in the northern hemisphere’szonal-mean flow. Journal of Atmospheric Sciences, 63, 2005.
[Leb72] N. N. Lebedev. Special Functions And Their Applications. DoverPublications, 1972.
[LL94] L. D. Landau and E. M. Lifshitz. Fisica teorica 3. Meccanicaquantistica: teoria non relativistica. Editori riuniti, 1994.
[Lor63] E. N. Lorenz. Deterministic nonperiodic flow. Journal of theAtmospheric Sciences, 20, 1963.
[Maj03] A. J. Majda. Introduction to PDEs and waves for the atmosphereand ocean. Courant lecture notes in mathematics. CourantInstitute of Mathematical Sciences Providence, 2003.
[MG88] K. Mo and M. Ghil. Cluster analysis of multiple planetaryflow regimes. Journal of Geophysical Research, 1988.
[MVL88] P. A. Michelangeli, R. Vautard, and B. Legras. Weather regi-mes: recurrence and quasi stationarity. Journal of AtmosphericSciences, 52, 1988.
[MW06] A. J. Majda and X. Wang. Non-linear dynamics and statisticaltheories for basic geophysical flows. Cambridge University Press,2006.
[Ped87] J. Pedlosky. Geophysical Fluid Dynamics. Springer- Verlag, 1987.
[QSS00] A. Quarteroni, R. Sacco, and F. Saleri. Matematica numerica.Springer, 2000.
[Sel95] F. M Selten. An efficient description of the dynamics ofbarotropic flow. Journal of the atmospheric sciences, 52, 1995.
[SIG99] P. Smyth, K. Ide, and M. Ghil. Multiple regimes in northernhemisphere height fields via mixture model clustering. Journalof the Atmospheric Sciences, 56, 1999.
BIBLIOGRAFIA 69
[SW71] E. M. Stein and G. Weiss. Introduction to Fourier analysis onEclidean space. Princeton University Press, 1971.
[TT10a] A. Tsionskiy and M. Tsionskiy. Existence, uniqueness andsmoothness of solution for 3d Navier-Stokes equations withany smooth initial velocity. ArXiv e-prints, 2010.
[TT10b] A. Tsionskiy and M. Tsionskiy. Solution of the Cauchy problemfor the Navier-Stokes and Euler equations. ArXiv e-prints,2010.
[VL88] R. Vautard and B. Legras. On the source of midlatitudelow- frequaency variability. part ii: Nonlinear equilibrationof weather regimes. Journal of the Atmospheric Sciences, 45,1988.
[WDH`92] D. L. Williamson, J. B. Drake, J.J. Hack, R. Jacob, and Swarz-trauber P.N. A standard test set for numerical approximationsto the shallow water equations in spherical geometry. Journalof Computational Physics, 102, 1992.
[Zei91] V. Zeitlin. Finite-mode analogs of 2d ideal hydrodynamics:Coadjoint orbits and local canonical structure. Physica D:Nonlinear Phenomena, 49, 1991.
[Zei04] V. Zeitlin. Self- consistent finite-mode approximations for thehydrodynamics of an incompressible fluid on nonrotating androtating spheres. Physical Review Letters, 93, 2004.

















![] UHXYp i s fHUM shk r fqXvu[ Vo f hkc fiu[hkfmontanar/RESEARCH/BOOK/main.pdf · 2006. 10. 10. · i & . & # ) ) # -](https://img.pdfslide.tips/doc/110x75/60d608a2c00df111dc7ee95e/-uhxyp-i-s-fhum-shk-r-fqxvu-vo-f-hkc-fiuhkf-montanarresearchbookmainpdf.jpg)










