Embed Size (px)
Citation preview

XIX CONGRESSO NAZIONALE AIDAA
17-21 settembre 2007 FORLÌ (FC)
CRITERI DI PROGETTO PER IL SISTEMA DI GUIDA, NAVIGAZIONE E CONTROLLO DEL VOLO IN FORMAZIONE
A.AGNENI1, M.SABATINI2, G.PALMERINI1, D.PAVARIN3, M.MANENTE3, C.BRAMANTI4, E.LORENZINI3
1Dipartimento di Ingegneria Aerospaziale e Astronautica, Università di Roma “La Sapienza” 2Scuola di Ingegneria Aerospaziale, Università di Roma “La Sapienza”
3Center of Studies and Activities for Space (CISAS), Università di Padova 4 Advanced Concept Team, ESA/ESTEC, Noordwijk
SOMMARIO
Il grande interesse per missioni svolte con la tecnica del volo in formazione, nelle quali due o più satelliti mantengono una geometria relativa preordinata, porta il progettista ad analizzarne i principali aspetti operativi. In particolare, questo lavoro è focalizzato sul controllo orbitale, il quale, a causa della necessità di precisione e stabilità molto più stringenti delle missioni tradizionali, può essere un significativo limite all’implementazione pratica di questo tipo di missione. L’applicazione presa in esame è volta all’incremento delle prestazioni di un satellite per il telerilevamento attivo con antenna SAR quando un secondo satellite, passivo, viene posto in formazione con esso. Si realizza così un radar bistatico, in cui la baseline tra i due satelliti deve essere mantenuta con precisione affinché le misure del secondo satellite possano essere correttamente interpretate. L’implementazione di diverse strategie di controllo, attuate tramite piccoli propulsori elettrici, è l’oggetto di studio in questo lavoro, in cui l’attenzione viene in particolar modo focalizzata sull’impatto che si riscontra sul sistema satellite, in termini di consumo di propellente, precisione di manovra e dimensionamento del sottosistema di potenza.
1. INTRODUZIONE Il volo in formazione è oggetto di grande interesse per diverse sue caratteristiche: in primo luogo la possibilità di realizzare un “satellite virtuale” attraverso l’interazione e lo scambio di informazioni tra i membri della formazione, ottenendo prestazioni che un singolo satellite non arriverebbe mai a raggiungere per gli ovvi limiti di ingombro e massa. In secondo luogo, la sua affidabilità, dovuta al fatto che qualsiasi possibile problema su uno dei membri della formazione può essere compensato da un funzionamento adattato degli altri satelliti, o rimpiazzato attraverso satelliti “di riserva”; la sua versatilità, con la possibilità di ottenere configurazioni diverse per diversi tipi di missioni durante il tempo di vita operativo; la possibilità di lanci multipli. Le tipologie di missioni per cui più spesso viene previsto l’utilizzo di formazioni di satelliti riguardano il telerilevamento, l’osservazione astrofisica per mezzo di tecniche di interferometria ottica, missioni scientifiche di fisica di base. Per soddisfare i diversi requisiti dei payload possono essere implementate differenti configurazioni della formazione, ciascuna delle quali sarà però soggetta a perturbazioni, instabilità ed errori. Per questo è sempre necessario progettare un sistema di controllo che fornisca la precisione desiderata (requisito spesso molto stringente), senza tuttavia gravare troppo sull’intero sistema satellite in termini di peso, ingombro ed eventuali modifiche imposte agli altri sottosistemi. Sono proprio questi tre aspetti (precisione, propellente richiesto e impatto sul sistema satellite) quelli che vengono presi in considerazione in questo lavoro come parametri per delineare la strategia di controllo più adatta.
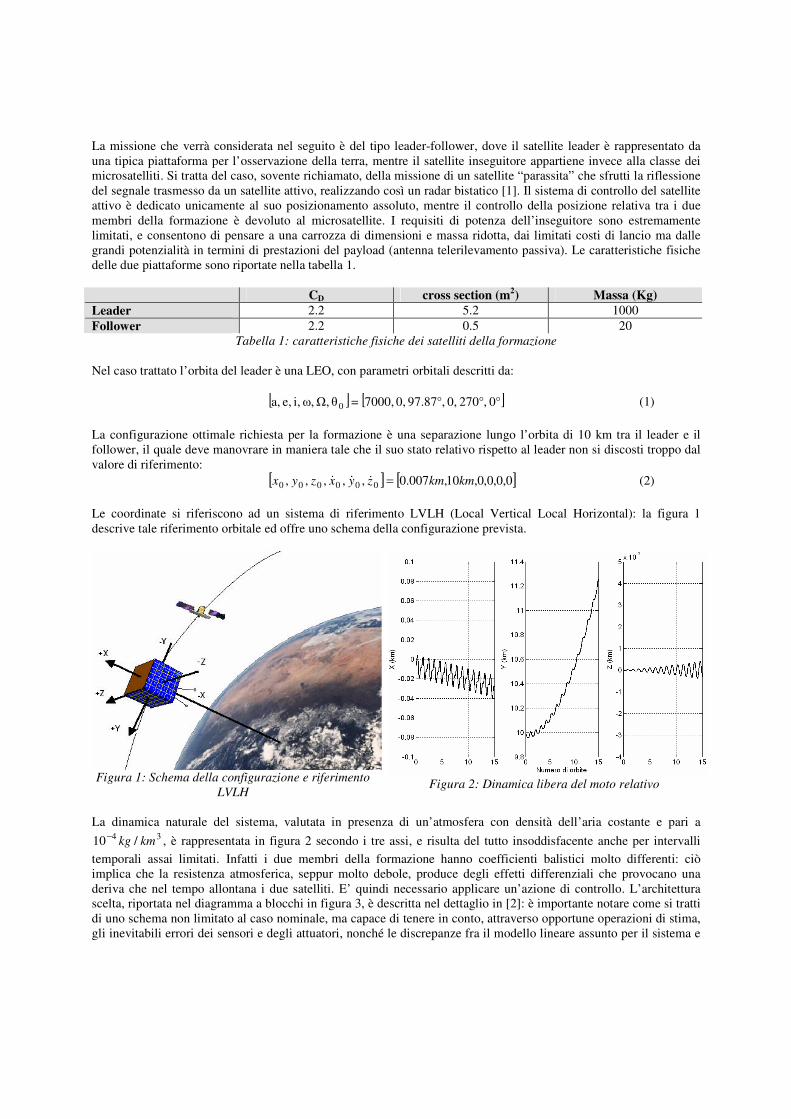
La missione che verrà considerata nel seguito è del tipo leader-follower, dove il satellite leader è rappresentato da una tipica piattaforma per l’osservazione della terra, mentre il satellite inseguitore appartiene invece alla classe dei microsatelliti. Si tratta del caso, sovente richiamato, della missione di un satellite “parassita” che sfrutti la riflessione del segnale trasmesso da un satellite attivo, realizzando così un radar bistatico [1]. Il sistema di controllo del satellite attivo è dedicato unicamente al suo posizionamento assoluto, mentre il controllo della posizione relativa tra i due membri della formazione è devoluto al microsatellite. I requisiti di potenza dell’inseguitore sono estremamente limitati, e consentono di pensare a una carrozza di dimensioni e massa ridotta, dai limitati costi di lancio ma dalle grandi potenzialità in termini di prestazioni del payload (antenna telerilevamento passiva). Le caratteristiche fisiche delle due piattaforme sono riportate nella tabella 1. CD cross section (m2) Massa (Kg) Leader 2.2 5.2 1000 Follower 2.2 0.5 20
Tabella 1: caratteristiche fisiche dei satelliti della formazione Nel caso trattato l’orbita del leader è una LEO, con parametri orbitali descritti da: [ ] [ ]°0 ,°270 0, ,°97.87 0, 7000,=� ,� ,� i, e, a, 0 (1)
La configurazione ottimale richiesta per la formazione è una separazione lungo l’orbita di 10 km tra il leader e il follower, il quale deve manovrare in maniera tale che il suo stato relativo rispetto al leader non si discosti troppo dal valore di riferimento: [ ] [ ]0,0,0,0,10,007.0,,,,, 000000 kmkmzyxzyx =��� (2)
Le coordinate si riferiscono ad un sistema di riferimento LVLH (Local Vertical Local Horizontal): la figura 1 descrive tale riferimento orbitale ed offre uno schema della configurazione prevista.
Figura 1: Schema della configurazione e riferimento LVLH
Figura 2: Dinamica libera del moto relativo
La dinamica naturale del sistema, valutata in presenza di un’atmosfera con densità dell’aria costante e pari a 34 /10 kmkg− , è rappresentata in figura 2 secondo i tre assi, e risulta del tutto insoddisfacente anche per intervalli
temporali assai limitati. Infatti i due membri della formazione hanno coefficienti balistici molto differenti: ciò implica che la resistenza atmosferica, seppur molto debole, produce degli effetti differenziali che provocano una deriva che nel tempo allontana i due satelliti. E’ quindi necessario applicare un’azione di controllo. L’architettura scelta, riportata nel diagramma a blocchi in figura 3, è descritta nel dettaglio in [2]: è importante notare come si tratti di uno schema non limitato al caso nominale, ma capace di tenere in conto, attraverso opportune operazioni di stima, gli inevitabili errori dei sensori e degli attuatori, nonché le discrepanze fra il modello lineare assunto per il sistema e
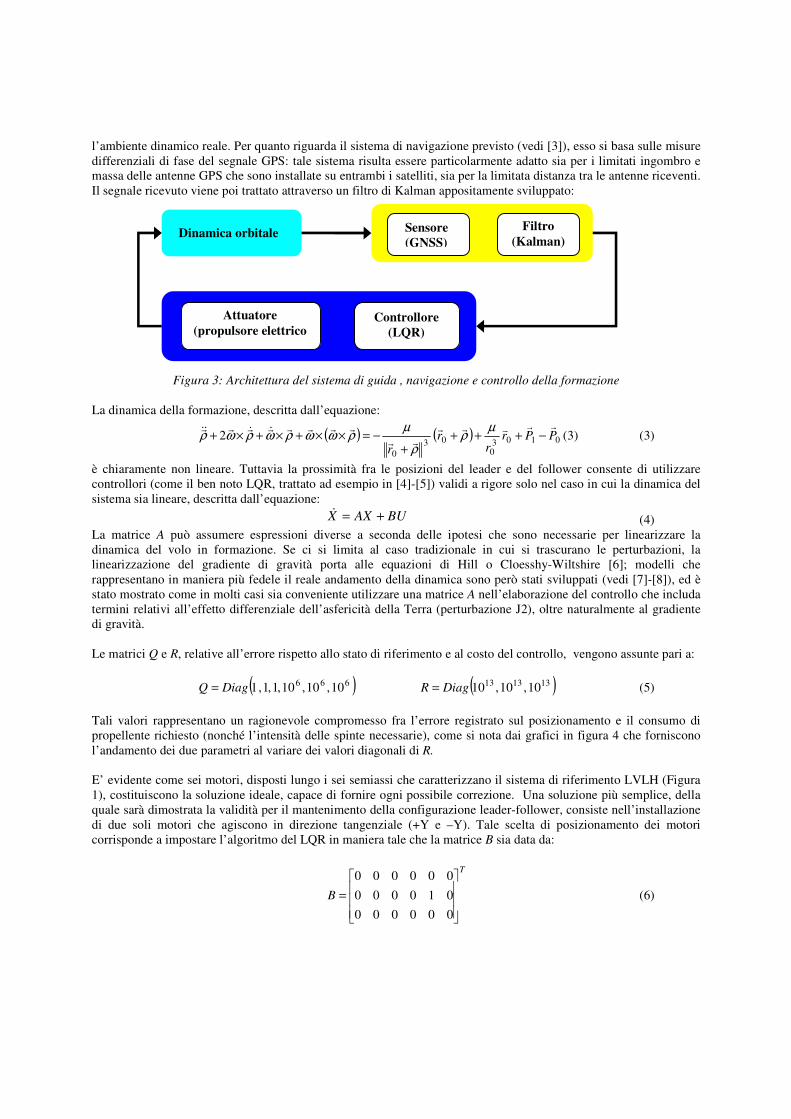
l’ambiente dinamico reale. Per quanto riguarda il sistema di navigazione previsto (vedi [3]), esso si basa sulle misure differenziali di fase del segnale GPS: tale sistema risulta essere particolarmente adatto sia per i limitati ingombro e massa delle antenne GPS che sono installate su entrambi i satelliti, sia per la limitata distanza tra le antenne riceventi. Il segnale ricevuto viene poi trattato attraverso un filtro di Kalman appositamente sviluppato:
Figura 3: Architettura del sistema di guida , navigazione e controllo della formazione
La dinamica della formazione, descritta dall’equazione:
( ) ( ) 01030
030
2 PPrr
rr
�����
��
������������ −++++
−=××+×+×+ µρρ
µρωωρωρωρ (3) (3)
è chiaramente non lineare. Tuttavia la prossimità fra le posizioni del leader e del follower consente di utilizzare controllori (come il ben noto LQR, trattato ad esempio in [4]-[5]) validi a rigore solo nel caso in cui la dinamica del sistema sia lineare, descritta dall’equazione:
BUAXX +=� (4) La matrice A può assumere espressioni diverse a seconda delle ipotesi che sono necessarie per linearizzare la dinamica del volo in formazione. Se ci si limita al caso tradizionale in cui si trascurano le perturbazioni, la linearizzazione del gradiente di gravità porta alle equazioni di Hill o Cloesshy-Wiltshire [6]; modelli che rappresentano in maniera più fedele il reale andamento della dinamica sono però stati sviluppati (vedi [7]-[8]), ed è stato mostrato come in molti casi sia conveniente utilizzare una matrice A nell’elaborazione del controllo che includa termini relativi all’effetto differenziale dell’asfericità della Terra (perturbazione J2), oltre naturalmente al gradiente di gravità. Le matrici Q e R, relative all’errore rispetto allo stato di riferimento e al costo del controllo, vengono assunte pari a: ( )666 10 ,10 ,10 ,1 ,1 , 1DiagQ = ( )131313 10 ,10 ,10DiagR = (5)
Tali valori rappresentano un ragionevole compromesso fra l’errore registrato sul posizionamento e il consumo di propellente richiesto (nonché l’intensità delle spinte necessarie), come si nota dai grafici in figura 4 che forniscono l’andamento dei due parametri al variare dei valori diagonali di R. E’ evidente come sei motori, disposti lungo i sei semiassi che caratterizzano il sistema di riferimento LVLH (Figura 1), costituiscono la soluzione ideale, capace di fornire ogni possibile correzione. Una soluzione più semplice, della quale sarà dimostrata la validità per il mantenimento della configurazione leader-follower, consiste nell’installazione di due soli motori che agiscono in direzione tangenziale (+Y e –Y). Tale scelta di posizionamento dei motori corrisponde a impostare l’algoritmo del LQR in maniera tale che la matrice B sia data da:
T
B���
�
�
���
�
�
=000000010000000000
(6)
Dinamica orbitale Sensore (GNSS)
Controllore (LQR)
Attuatore (propulsore elettrico
Filtro (Kalman)
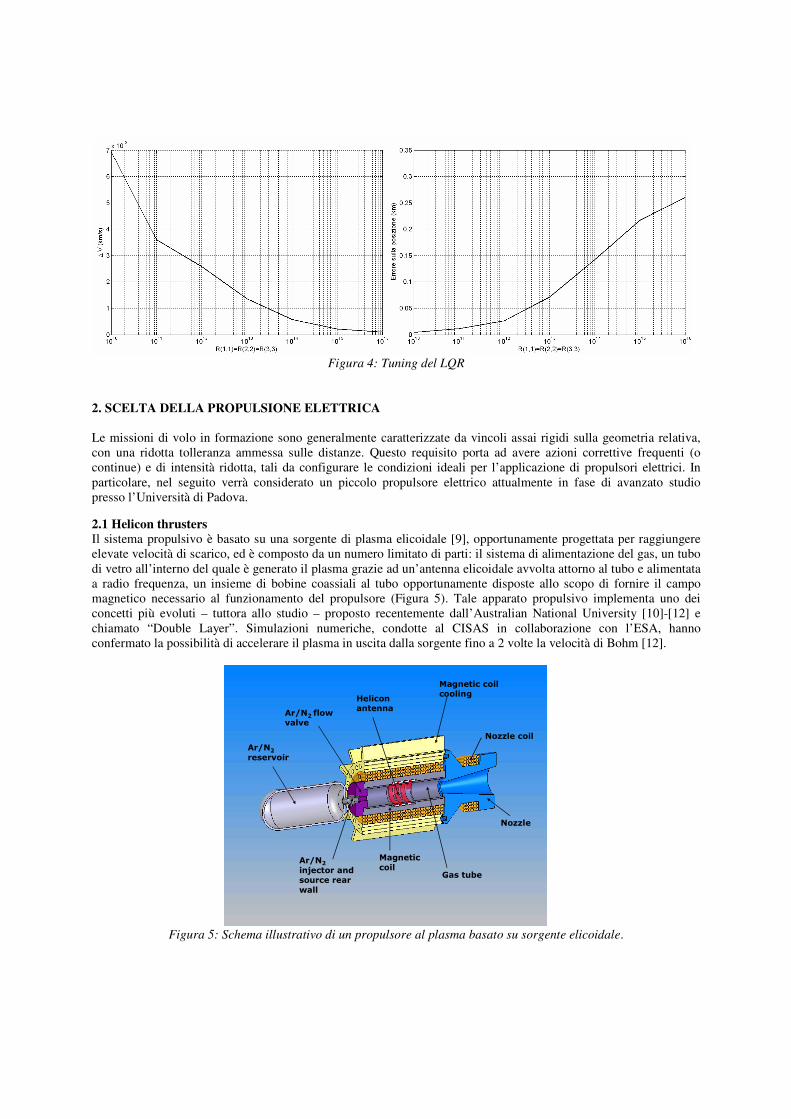
Figura 4: Tuning del LQR
2. SCELTA DELLA PROPULSIONE ELETTRICA Le missioni di volo in formazione sono generalmente caratterizzate da vincoli assai rigidi sulla geometria relativa, con una ridotta tolleranza ammessa sulle distanze. Questo requisito porta ad avere azioni correttive frequenti (o continue) e di intensità ridotta, tali da configurare le condizioni ideali per l’applicazione di propulsori elettrici. In particolare, nel seguito verrà considerato un piccolo propulsore elettrico attualmente in fase di avanzato studio presso l’Università di Padova. 2.1 Helicon thrusters Il sistema propulsivo è basato su una sorgente di plasma elicoidale [9], opportunamente progettata per raggiungere elevate velocità di scarico, ed è composto da un numero limitato di parti: il sistema di alimentazione del gas, un tubo di vetro all’interno del quale è generato il plasma grazie ad un’antenna elicoidale avvolta attorno al tubo e alimentata a radio frequenza, un insieme di bobine coassiali al tubo opportunamente disposte allo scopo di fornire il campo magnetico necessario al funzionamento del propulsore (Figura 5). Tale apparato propulsivo implementa uno dei concetti più evoluti – tuttora allo studio – proposto recentemente dall’Australian National University [10]-[12] e chiamato “Double Layer”. Simulazioni numeriche, condotte al CISAS in collaborazione con l’ESA, hanno confermato la possibilità di accelerare il plasma in uscita dalla sorgente fino a 2 volte la velocità di Bohm [12].
������������
��� ��
�������������������
������
���������������
��������������
�����������
�������
���������������������� ��������
���
������������
��� ��
�������������������
������
���������������
��������������
�����������
�������
���������������������� ��������
���
Figura 5: Schema illustrativo di un propulsore al plasma basato su sorgente elicoidale.
2.2 Simulazione numerica dell’apparato propulsivo Il sistema propulsivo in oggetto è stato simulato attraverso l’impiego in sequenza di tre codici distinti: a) modello a parametri concentrati della sporgente di plasma, b) modello PIC 1-D del sistema propulsivo , c) modello PIC 2-D del sistema propulsivo. Il modello globale è usato per simulare la sorgente di plasma, consentendo di determinare il tasso di ionizzazione, la densità del plasma e la temperatura elettronica da fornire come input agli altri due codici. Esso è basato principalmente su equazioni di continuità per ogni specie presente nella sorgente (elettroni, e tutte le specie ioniche e neutre), e un’equazione dell’energia riguardante gli elettroni. In aggiunta, il modello consente di valutare le prestazioni del sistema in presenza di campi di confinamento magnetico, e contempla le interazioni plasma-neutri, consentendo in particolare di simulare la riduzione dei neutri a causa della dinamica della sorgente (pumping effect) [13]-[14] e infine il riscaldamento degli stessi [15]. Il codice PIC monodimensionale (PPDL) utilizza elettroni di Boltzmann, e ioni cinetici ed include gli effetti 2-D considerati maggiormente influenti sull’evoluzione del plasma. PPDL impiega un solutore implicito non lineare che consente ridotti tempi di calcolo. Le caratteristiche principali di PPDL sono:
� il moto degli ioni è simulato attraverso il movimento del loro centro di massa � l’andamento bidimensionale del campo magnetico è contemplato nella simulazione mediante la
conservazione dell’invariante adiabatico. � gli elettroni sono fluidi (elettroni di Boltzmann) � il potenziale alle pareti di estremità può essere fluttuante o fisso. � la generazione del plasma è simulata attraverso termini sorgente che sono introdotti sulla base del codice
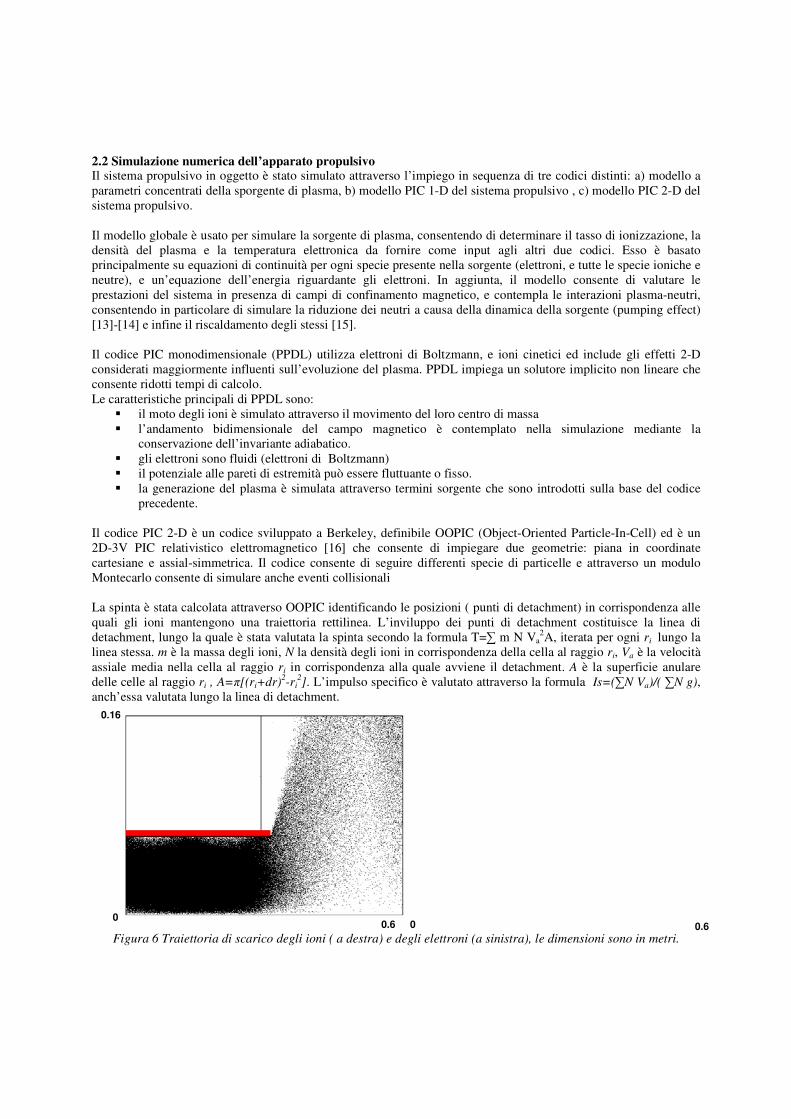
precedente. Il codice PIC 2-D è un codice sviluppato a Berkeley, definibile OOPIC (Object-Oriented Particle-In-Cell) ed è un 2D-3V PIC relativistico elettromagnetico [16] che consente di impiegare due geometrie: piana in coordinate cartesiane e assial-simmetrica. Il codice consente di seguire differenti specie di particelle e attraverso un modulo Montecarlo consente di simulare anche eventi collisionali La spinta è stata calcolata attraverso OOPIC identificando le posizioni ( punti di detachment) in corrispondenza alle quali gli ioni mantengono una traiettoria rettilinea. L’inviluppo dei punti di detachment costituisce la linea di detachment, lungo la quale è stata valutata la spinta secondo la formula T=� m N Va
2A, iterata per ogni ri lungo la linea stessa. m è la massa degli ioni, N la densità degli ioni in corrispondenza della cella al raggio ri, Va è la velocità assiale media nella cella al raggio ri in corrispondenza alla quale avviene il detachment. A è la superficie anulare delle celle al raggio ri , A=�[(ri+dr)2-ri
2]. L’impulso specifico è valutato attraverso la formula Is=(�N Va)/( �N g), anch’essa valutata lungo la linea di detachment.
00.6
0.16
0 0.6 Figura 6 Traiettoria di scarico degli ioni ( a destra) e degli elettroni (a sinistra), le dimensioni sono in metri.
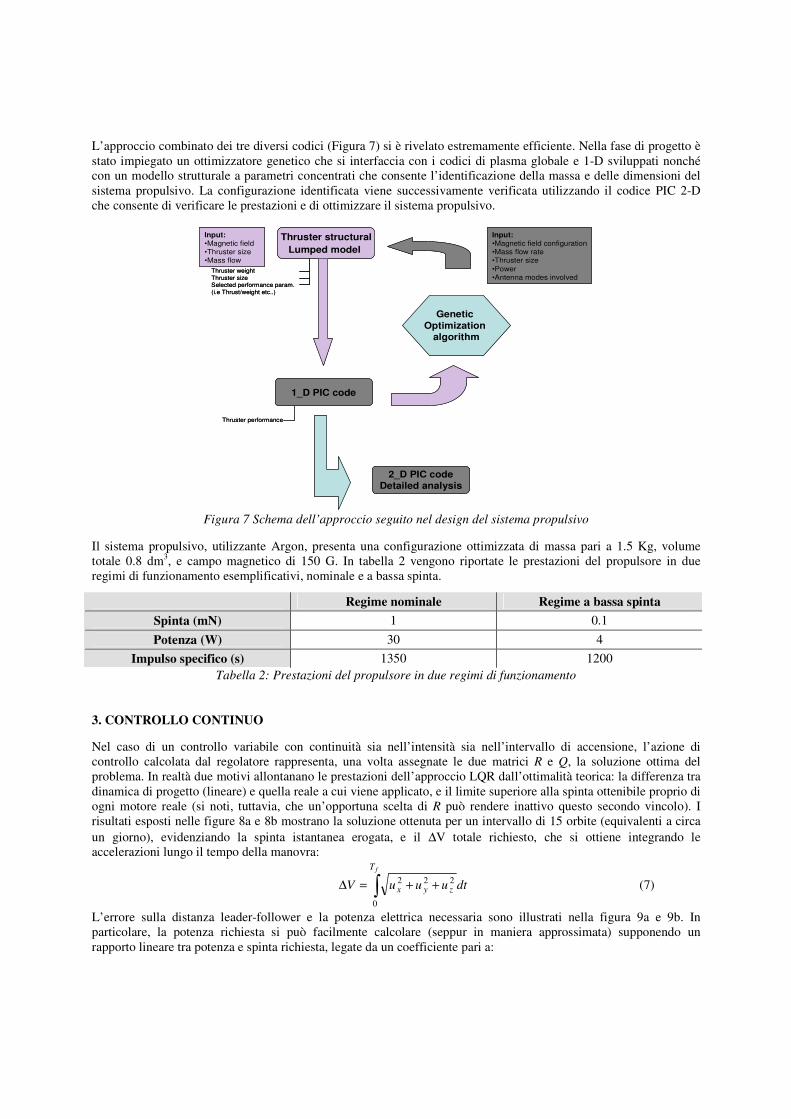
L’approccio combinato dei tre diversi codici (Figura 7) si è rivelato estremamente efficiente. Nella fase di progetto è stato impiegato un ottimizzatore genetico che si interfaccia con i codici di plasma globale e 1-D sviluppati nonché con un modello strutturale a parametri concentrati che consente l’identificazione della massa e delle dimensioni del sistema propulsivo. La configurazione identificata viene successivamente verificata utilizzando il codice PIC 2-D che consente di verificare le prestazioni e di ottimizzare il sistema propulsivo.
Genetic Optimization
algorithm
Input:•Magnetic field configuration•Mass flow rate•Thruster size•Power•Antenna modes involved
Thruster structuralLumped model
Thruster weightThruster sizeSelected performance param.(i.e Thrust/weight etc..)
Input:•Magnetic field •Thruster size•Mass flow
Thruster performance
1_D PIC code
2_D PIC codeDetailed analysis
Genetic Optimization
algorithm
Input:•Magnetic field configuration•Mass flow rate•Thruster size•Power•Antenna modes involved
Thruster structuralLumped model
Thruster weightThruster sizeSelected performance param.(i.e Thrust/weight etc..)
Input:•Magnetic field •Thruster size•Mass flow
Thruster performance
1_D PIC code
2_D PIC codeDetailed analysis
Figura 7 Schema dell’approccio seguito nel design del sistema propulsivo
Il sistema propulsivo, utilizzante Argon, presenta una configurazione ottimizzata di massa pari a 1.5 Kg, volume totale 0.8 dm3, e campo magnetico di 150 G. In tabella 2 vengono riportate le prestazioni del propulsore in due regimi di funzionamento esemplificativi, nominale e a bassa spinta.
Regime nominale Regime a bassa spinta Spinta (mN) 1 0.1 Potenza (W) 30 4
Impulso specifico (s) 1350 1200 Tabella 2: Prestazioni del propulsore in due regimi di funzionamento
3. CONTROLLO CONTINUO Nel caso di un controllo variabile con continuità sia nell’intensità sia nell’intervallo di accensione, l’azione di controllo calcolata dal regolatore rappresenta, una volta assegnate le due matrici R e Q, la soluzione ottima del problema. In realtà due motivi allontanano le prestazioni dell’approccio LQR dall’ottimalità teorica: la differenza tra dinamica di progetto (lineare) e quella reale a cui viene applicato, e il limite superiore alla spinta ottenibile proprio di ogni motore reale (si noti, tuttavia, che un’opportuna scelta di R può rendere inattivo questo secondo vincolo). I risultati esposti nelle figure 8a e 8b mostrano la soluzione ottenuta per un intervallo di 15 orbite (equivalenti a circa un giorno), evidenziando la spinta istantanea erogata, e il ∆V totale richiesto, che si ottiene integrando le accelerazioni lungo il tempo della manovra:
� ++=∆fT
zyx dtuuuV0
222 (7)
L’errore sulla distanza leader-follower e la potenza elettrica necessaria sono illustrati nella figura 9a e 9b. In particolare, la potenza richiesta si può facilmente calcolare (seppur in maniera approssimata) supponendo un rapporto lineare tra potenza e spinta richiesta, legate da un coefficiente pari a:
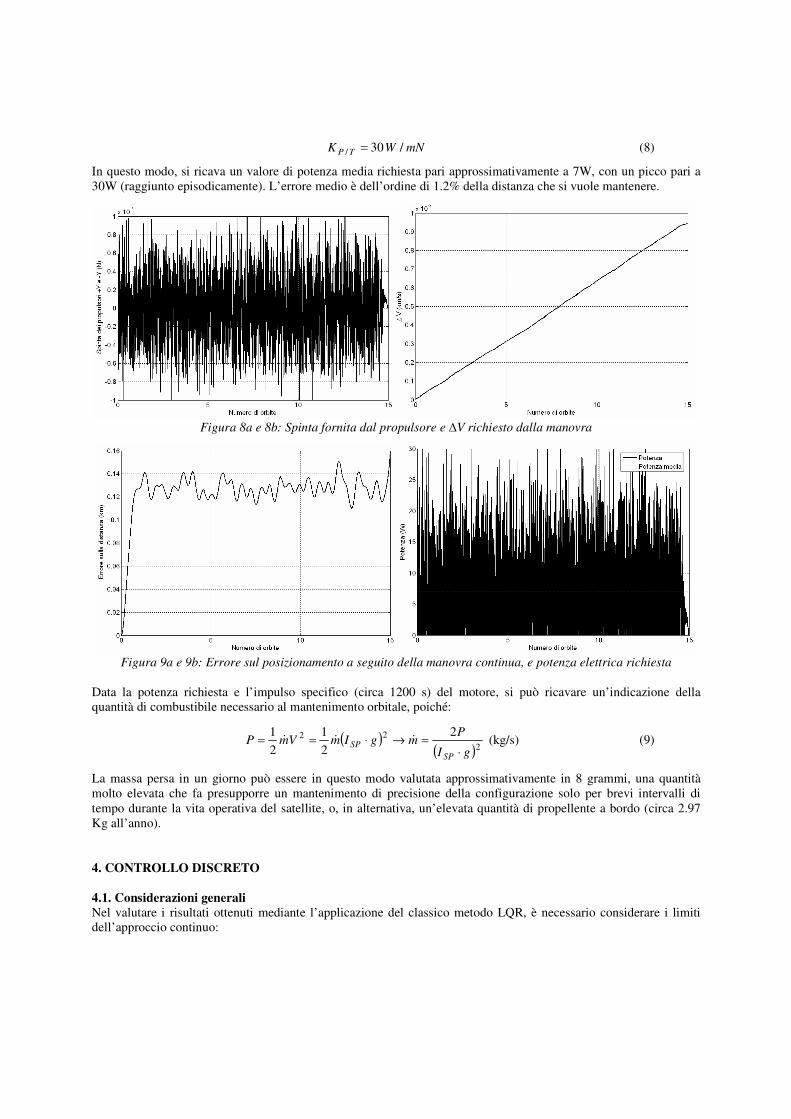
mNWK TP / 30/ = (8)
In questo modo, si ricava un valore di potenza media richiesta pari approssimativamente a 7W, con un picco pari a 30W (raggiunto episodicamente). L’errore medio è dell’ordine di 1.2% della distanza che si vuole mantenere.
Figura 8a e 8b: Spinta fornita dal propulsore e �V richiesto dalla manovra
Figura 9a e 9b: Errore sul posizionamento a seguito della manovra continua, e potenza elettrica richiesta
Data la potenza richiesta e l’impulso specifico (circa 1200 s) del motore, si può ricavare un’indicazione della quantità di combustibile necessario al mantenimento orbitale, poiché:
( )( )
(kg/s) 2
21
21
222
gI
PmgImVmP
SPSP
⋅=→⋅== ��� (9)
La massa persa in un giorno può essere in questo modo valutata approssimativamente in 8 grammi, una quantità molto elevata che fa presupporre un mantenimento di precisione della configurazione solo per brevi intervalli di tempo durante la vita operativa del satellite, o, in alternativa, un’elevata quantità di propellente a bordo (circa 2.97 Kg all’anno). 4. CONTROLLO DISCRETO
4.1. Considerazioni generali Nel valutare i risultati ottenuti mediante l’applicazione del classico metodo LQR, è necessario considerare i limiti dell’approccio continuo:

- alcuni propulsori potrebbero non fornire una spinta variabile con la desiderata continuità; - l’impianto propulsivo sempre acceso potrebbe disturbare il funzionamento del payload in alcuni tipi di missione; - l’impianto di potenza risultante è chiaramente sovradimensionato, dovendo rispondere a picchi che si verificano assai di rado, ma ad intervalli non determinabili a priori (difficile dunque pensare ad un alimentazione coadiuvata da batterie); - la stessa quantità di propellente richiesta appare elevata, questo è dovuto al fatto che l’azione di controllo tenderà comunque a riportare la piattaforma alla posizione nominale, non consentendo né sfruttando alcuna finestra di tolleranza. E’ possibile ricercare una soluzione ottima fra i controllori discreti, ove il termine discreto si intende riferito non ai tempi di accensione, bensì all’intensità della spinta. Nell’ambito di questo lavoro, tuttavia, si preferisce prescindere dal requisito di ottimalità per prestare una maggiore attenzione alle implicazioni che la legge di controllo scelta ha sull’impianto. In quest’ottica il più stringente fra i problemi evidenziati appare senz’altro la possibile difficoltà nell’ottenere una spinta che sia realmente variabile con continuità: supponendo due soli livelli di spinta possibili per il motore, si può considerare un controllo di tipo binario da calcolarsi riconducendo l’uscita del ciclo LQR ai due soli valori consentiti dall’impianto propulsivo con ugelli in direzione +Y –Y (sulla falsariga di quanto in [17]).
���
���
�
−<−
>
=
casi altri negli 0 2
se
2
se
MAXMAX
MAXMAX
uuu
uuu
u LQR
LQR
(10)
La durata cumulativa di accensione dei motori (la cui spinta è riportata in figura 10.a) è pari al 59.4% del tempo totale di simulazione e l’errore (fig. 10.b) mediamente non è troppo differente dal precedente, anche se presenta una banda di escursione più larga. Pur presentando un funzionamento a regime più uniforme (quando è acceso ha una richiesta di potenza pari al valore massimo erogabile (figura 11), il consumo è però sensibilmente maggiore del caso a spinta continua, risultando circa pari a 21 grammi al giorno, per un totale (improponibile per un microsatellite) di 7kg/anno.
Figura 10a e 10b: Spinta fornita dal propulsore ed errore sul posizionamento a seguito della manovra discretizzata
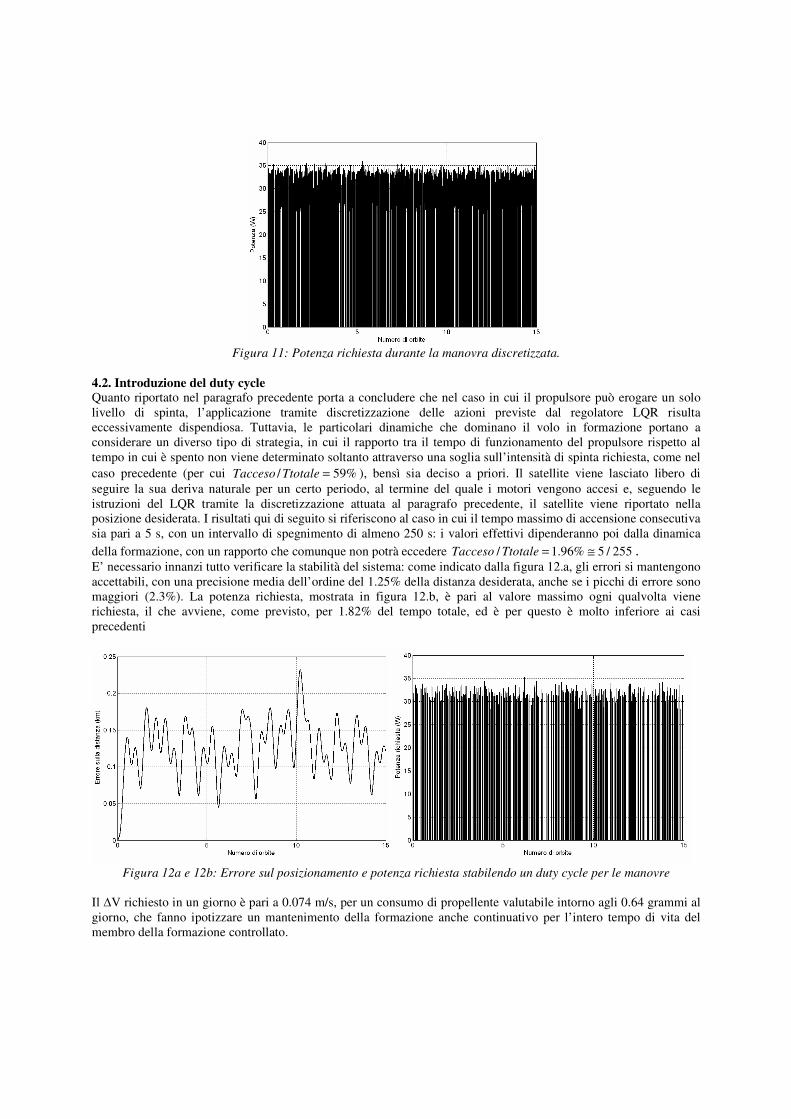
Figura 11: Potenza richiesta durante la manovra discretizzata.
4.2. Introduzione del duty cycle Quanto riportato nel paragrafo precedente porta a concludere che nel caso in cui il propulsore può erogare un solo livello di spinta, l’applicazione tramite discretizzazione delle azioni previste dal regolatore LQR risulta eccessivamente dispendiosa. Tuttavia, le particolari dinamiche che dominano il volo in formazione portano a considerare un diverso tipo di strategia, in cui il rapporto tra il tempo di funzionamento del propulsore rispetto al tempo in cui è spento non viene determinato soltanto attraverso una soglia sull’intensità di spinta richiesta, come nel caso precedente (per cui %59/ =TtotaleTacceso ), bensì sia deciso a priori. Il satellite viene lasciato libero di seguire la sua deriva naturale per un certo periodo, al termine del quale i motori vengono accesi e, seguendo le istruzioni del LQR tramite la discretizzazione attuata al paragrafo precedente, il satellite viene riportato nella posizione desiderata. I risultati qui di seguito si riferiscono al caso in cui il tempo massimo di accensione consecutiva sia pari a 5 s, con un intervallo di spegnimento di almeno 250 s: i valori effettivi dipenderanno poi dalla dinamica della formazione, con un rapporto che comunque non potrà eccedere 255/5%96.1/ ≅=TtotaleTacceso . E’ necessario innanzi tutto verificare la stabilità del sistema: come indicato dalla figura 12.a, gli errori si mantengono accettabili, con una precisione media dell’ordine del 1.25% della distanza desiderata, anche se i picchi di errore sono maggiori (2.3%). La potenza richiesta, mostrata in figura 12.b, è pari al valore massimo ogni qualvolta viene richiesta, il che avviene, come previsto, per 1.82% del tempo totale, ed è per questo è molto inferiore ai casi precedenti
Figura 12a e 12b: Errore sul posizionamento e potenza richiesta stabilendo un duty cycle per le manovre
Il �V richiesto in un giorno è pari a 0.074 m/s, per un consumo di propellente valutabile intorno agli 0.64 grammi al giorno, che fanno ipotizzare un mantenimento della formazione anche continuativo per l’intero tempo di vita del membro della formazione controllato.
I valori di accensione e spegnimento che caratterizzano il duty cycle sono stati scelti in base a considerazioni di carattere dinamico. Si è verificato che non è importante tanto la durata della manovra, quanto piuttosto la durata dell’intervallo in cui il motore è spento, perché non bisogna dare modo alla dinamica orbitale di produrre drift così elevati da non poter essere più compensati dalla bassa spinta. I valori selezionati nel precedente esempio discendono da un trade-off tra bassa richiesta in termini di �V (e di potenza elettrica) e basso errore sulla posizione desiderata, e sono sintetizzati dalle Figure 13.a, 13.b, in cui è stato evidenziato il punto di lavoro. Come si vede, non è conveniente effettuare accensioni troppo ravvicinate, poiché l’errore medio rimane pressoché costante; tuttavia al di sopra di un certo valore la formazione di fatto non è più controllata.
Figura 13a e 13 b: �V ed errore sul posizionamento in funzione dell’intervallo tra due successive accensioni
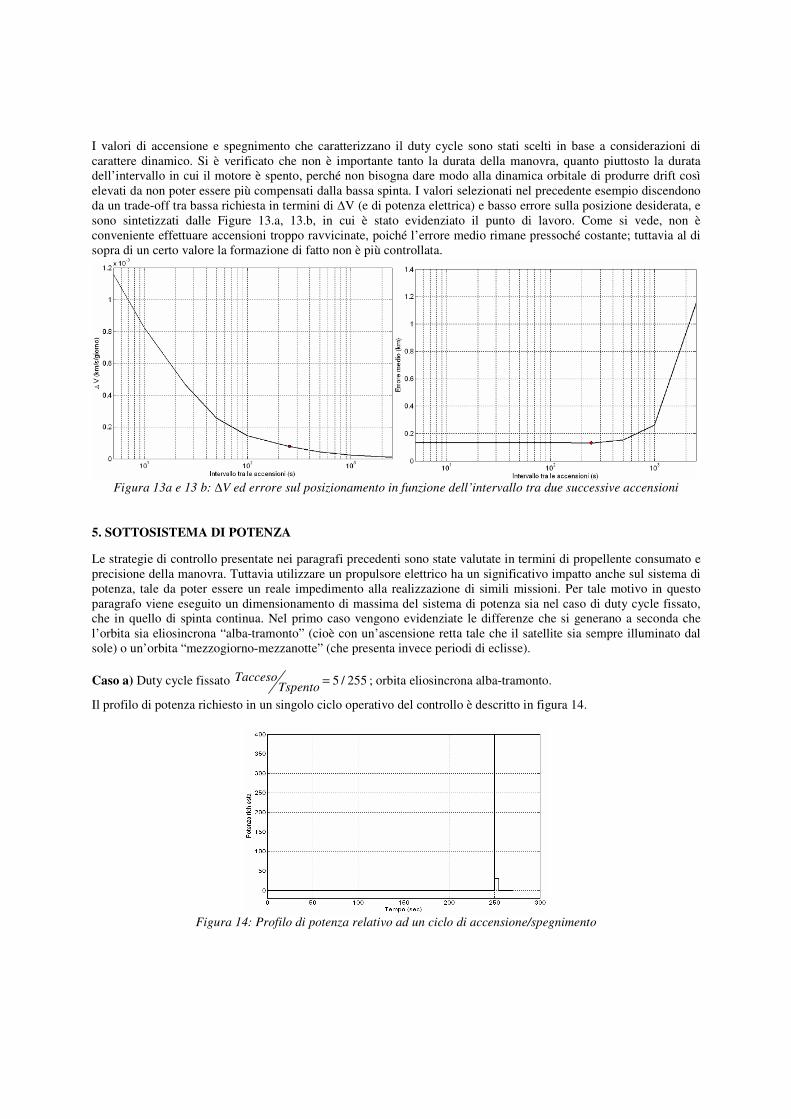
5. SOTTOSISTEMA DI POTENZA Le strategie di controllo presentate nei paragrafi precedenti sono state valutate in termini di propellente consumato e precisione della manovra. Tuttavia utilizzare un propulsore elettrico ha un significativo impatto anche sul sistema di potenza, tale da poter essere un reale impedimento alla realizzazione di simili missioni. Per tale motivo in questo paragrafo viene eseguito un dimensionamento di massima del sistema di potenza sia nel caso di duty cycle fissato, che in quello di spinta continua. Nel primo caso vengono evidenziate le differenze che si generano a seconda che l’orbita sia eliosincrona “alba-tramonto” (cioè con un’ascensione retta tale che il satellite sia sempre illuminato dal sole) o un’orbita “mezzogiorno-mezzanotte” (che presenta invece periodi di eclisse).
Caso a) Duty cycle fissato 255/5=TspentoTacceso ; orbita eliosincrona alba-tramonto.
Il profilo di potenza richiesto in un singolo ciclo operativo del controllo è descritto in figura 14.
Figura 14: Profilo di potenza relativo ad un ciclo di accensione/spegnimento

Come illustrato nel paragrafo 4.2, il ciclo del controllo prevede 250 secondi in cui non vengono effettuate manovre (potenza richiesta nulla), seguiti da regimet∆ =5 secondi in cui il motore è in funzione (potenza richiesta:
regimeP =30W). All’accensione è necessario un picco di potenza dell’ordine di accensioneP =400W per un tempo di
accensionet∆ =100 ms: tale richiesta verrà soddisfatta attraverso opportuni condensatori. La differenza di potenziale (nel seguito indicata con ddp) a cui funziona il motore è fissata a 24V. L’architettura del sistema prevede che la richiesta di potenza descritta non venga soddisfatta da un’alimentazione diretta dei pannelli solari (seppure sempre illuminati), poiché essa è elevata solo per brevi intervalli di tempo. I pannelli sono perciò dimensionati sulla potenza media richiesta, e un pacco di batterie fornisce una parte della potenza necessaria al momento dell’attuazione. Tuttavia, quanto detto non avviene attraverso cicli di scarica e carica delle batterie: infatti i cicli sarebbero troppo numerosi (in tre anni – tempo di vita ipotizzato – si possono stimare circa 370000 manovre di mantenimento). Il sistema con cui viene soddisfatta la richiesta di potenza è quello denominato “trickle charge”, in cui le batterie sono sotto carica per tutto il tempo di vita e la perdita di capacità ad ogni manovra è una minima parte di quella totale. La scarica, in termini di capacità, che avviene ad ogni ciclo è relativa al funzionamento a regime di manovra, sommato alla carica fornita al condensatore per il picco all’accensione:
Aht
ddp
Pt
ddp
PC accensioneaccensioneregimeregime
ciclo3102.2
36003600−⋅=
∆⋅+
∆⋅=∆ (11)
Tale diminuzione della capacità è posta pari all’1% di quella totale, in modo tale da minimizzare l’usura delle batterie. La capacità che deve avere il pacco delle batterie risulta perciò pari a WhAhC 28.522.0 == . Da tale valore
si può ricavare facilmente il peso del pacco di batterie kgC
PWh
Batterie 176.0==ρ
per mezzo della loro densità
espressa in Wh/kg ( kgWhWh /30=ρ per batterie Ni-Cd [18]). La potenza richiesta per il funzionamento dei motori, mediamente risulta pari a:
WT
tPtPP
totale
regimeregimeaccensioneaccenzione 745.0≅∆+∆
= (12)
In tale valore è compreso sia la ricarica della batteria che del condensatore. Per ottenere la potenza erogata dai pannelli solari a fine vita (EOL, End Of Life), occorre moltiplicare il valore sopra ottenuto per l’efficienza di carica
delle batterie, che è dell’ordine di 65.0=η . Pertanto WP
PEOL 15.1==η
La potenza necessaria a inizio vita (BOL, Beginning of Life) sarà ottenuta considerando la perdita di efficienza per invecchiamento delle celle solari (circa il 3% l’anno, in tre anni 9.03 ≅anniη ), il massimo angolo tra la direzione di
irraggiamento e la normale alla superficie dei pannelli ( °=Φ 30MAX ), e l’effetto della temperatura:
( )( ) ( )( ) WT
PP
MAXanni
EOLaBOL 6.1
30cos9.0111.0115.1
cos11 3=
°−−=
Φ−∆−=
ηα (13)
dove con α si è indicato il coefficiente di temperatura (per celle al silicio grado/%5.0=α ), e °=∆ 22T è il salto
di temperatura rispetto a quella di riferimento ( CT °= 280 ). Una cella al silicio fornisce circa 40 mA/cm2, per una tensione di 0.5V. Supponendo che il fattore di impacchettamento sia F=0.85, la superficie dei pannelli solari risulta pari a:
22
1.941
/20cm
FcmmW
PS
aBOL =⋅=
(14)
Poiché il microsatellite considerato ha una cross-section di 0.5 m2, ed ipotizzando di poter usufruire di una superficie utile pari ad almeno 0.45 m2 si conclude che il sistema di propulsione elettrica richiede per la sua alimentazione solo il 2% dell’intera superficie disponibile.

Caso b) Duty cycle fissato 255/5=TspentoTacceso , orbita eliosincrona mezzogiorno-mezzanotte.
La percentuale del tempo di eclisse, rispetto al periodo orbitale complessivo, per un satellite su orbita circolare di questo tipo ad una quota di 622km è del 36%; quindi si ha un rapporto tempo di eclisse te su tempo di illuminazione
ti pari a 56.0=i
e
t
t. Per essere mantenuto in regime di “trickle charge”, con perdita della capacità delle batteria non
superiore al valore 1% del totale, poiché nel periodo di eclisse possono essere compiute fino a 8 manovre, la capacità perduta durante l’eclisse sarà: AhCC cicloeclissi
21076.18 −⋅=∆⋅=∆ (15)
La capacità totale sarà pari a: WhAhCC eclisse 2.4276.1100 ==∆= , con un peso del pacco delle batterie pari a 1.4 kg. Se si volessero mantenere le stesse batterie del caso a), si dovrebbe abbandonare il regime di trickle charge. La
potenza necessaria ad inizio vita, tenendo ora conto del rapporto i
e
t
t è pari a W
tt
PPi
eaBOL
bBOL 5.21 =��
����
�+⋅= . La
superficie richiesta in questo caso risulta pari a: 21.147 cmS = , cioè il 3.3% della superficie totale disponibile. Bisogna considerare che in questo caso le batterie devono essere assoggettate ad numero di cicli pari a 16230 (3 anni di vita operativa) con D.O.D. pari a 8%. Caso c) Spinta continua, orbita eliosincrona mezzogiorno-mezzanotte. Poiché la potenza media richiesta durante la missione è di 7W (vedi Figura 9b), quella richiesta ai pannelli a fine vita sarà:
WttP
Pi
e
batteriaEOL 8.161 =��
����
�+=
η (16)
Mentre la potenza ad inizio vita risulta pari a: ( )( ) WT
PP
MAXanni
EOLaBOL 4.23
cos11 3=
Φ−∆−=
ηα, essendo le grandezze
MAXanniT Φ∆ e ,, 3ηα uguali al caso b).
La superficie necessaria per i pannelli solari è in questo caso notevole: 21170cmS = , pari cioè al 26% della superficie totale a disposizione dei pannelli. I picchi di potenza vengono gestiti dalle batterie. Durante l’eclissi queste si scaricano
di: Aht
ddpP
C eclisse 158.03600
=∆
=∆
Supponendo questo valore sia pari al 8% della capacità totale:: WhAhC 4.471.975 == , a cui corrisponde un peso del pacco di batterie di 1.58 Kg e devono affrontare 16230 cicli. La tabella 3 riassume i risultati ottenuti per il dimensionamento dell’impianto di potenza.
Duty Cycle:
sempre illuminato
Duty Cycle:
con eclissi Controllo continuo
Peso batterie (kg) 0.176 (trickle charge) 1.4 (trickle charge)
0.176 (16230 cicli) 1.58 (16230cicli)
Superficie Pannelli (cm2) 94.1 147.1 1170
Tabella 3: Dimensionamento del sottosistema di potenza

CONCLUSIONI
L’impianto di guida, navigazione e controllo ha un profondo impatto sull’architettura dell’intero sistema satellite. Questo è ancor più vero per il volo in formazione di satelliti, a causa dei suoi stringenti requisiti sulla determinazione e mantenimento della configurazione relativa. In questo lavoro vengono analizzate differenti strategie di controllo, sia continuo sia discreto, grazie ad un simulatore realistico costituito da un propagatore orbitale completo e da un controllore LQR che, attraverso le stime fornite da un opportuno sottosistema di navigazione, comanda l’attuatore prescelto. Grazie alle ridotte dimensioni del satelliti controllato è ritenuto particolarmente conveniente e investigato in dettaglio l’utilizzo piccoli propulsori elettrici. A causa dei limiti sul valore massimo, sulla stabilità e sulle variazioni ammissibili della spinta, l’impatto di questa scelta di progetto sulle prestazioni del sistema di controllo risulta notevole: la precisione e la rapidità di manovra sono ridotte, mentre i consumi non decrescono in egual misura. Queste considerazioni portano a esaminare strategie che si discostino dal classico LQR continuo, introducendo la possibilità di effettuare il controllo solo in determinati istanti di tempo, con intensità predefinite: in questo caso le richieste di propellente sono limitate mentre la precisione nel mantenimento della configurazione rimane soddisfacente. Il ricorso ai motori elettrici tuttavia richiede anche un’attenta valutazione della potenza: l’impatto sul satellite della funzione di controllo è perciò analizzato anche attraverso il dimensionamento del sottosistema elettrico, mettendo in luce quali possibili soluzioni portino ad un eccessiva massa delle batterie o superficie dei pannelli, e quali invece risultino particolarmente conveniente. BIBLIOGRAFIA [1] Moccia A, Fundamentals of Bistatic Synthetic Aperture Radar, chapter 1 in Bistatic radar: an emerging technology, M. Cherniakov editor, in printing John Wiley & Sons, 2007 [2] G.B. Palmerini, M. Sabatini, Dynamics and control of low-altitude formations, Acta Astronautica, Vol. 61, No. 1, pp. 298-311, June 2007. [3] M. Sabatini, F. Reali, G.B. Palmerini, Autonomous State Estimation in Formation Flight, 2007 IEEE Aerospace Conference, 3-10 March 2007. [4] S. S. Vaddi and S. R. Vadali, Linear and Nonlinear Control Laws for Formation Flying, 13th AAS/AIAA Space Flight Mechanics Meeting, 9–13 February 2003. [5] M. Sabatini, D. Izzo, G.B. Palmerini, Analysis and Control of Convenient Orbital Configurations for Formation Flying Missions, 2006 AAS/AIAA Space Flight Mechanics Meeting, Tampa Florida USA. [6] W. H. Clohessy, Terminal Guidance System for Satellite Rendezvous, Journal of Aerospace Sciences, Vol. 27, No. 9, September 1960, pp. 653 – 658, 674. [7] M. Humi and T. Carter, Motions in a Central Force Field with a Quadratic Drag Model, Paper AAS 03–238, 13th AAS/AIAA Space Flight Mechanics Meeting, Ponce (Puerto Rico), 2003. [8] D. Izzo, M. Sabatini and C. Valente, A New Linear Model Describing Formation Flying Dynamics Under J2 effect, XVII A.I.D.A.A. National Congress, Rome, September 2003. [9] Goulding RH, Pavarin D, Angrilli F, Barber GC, Carter MD, Maggiora R, Sparks DO, Helicon plasma source configuration analysis by means of density measurements, ICEAA, Torino, Italy, 1999 [10] A. Raadu, Particle Acceleration Mechanisms in Space Plasmas, Phys. Chem. Earth (C), Vol. 26, No. 1-3, pp.55-59, 2001 [11] Perkins and Y.C. Sun, Double Layers without current, Phys. Rev. Lett. 46, 115 (1981) [12] M. Manente, J. Carlsson, I. Musso, C. Bramanti, D.Pavarin and F.Angrilli, Numerical simulation of the Helicon Double Layer Thruster Concept, 8 - 11 Jul 2007 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference [13] Gilland J, Neutral Pumping in a Helicon Discharge, Plasma Sources Sci Tec, n 7, 1998, pp 416-422. [14] G. R. Tynan, Neutral depletion and transport mechanism in large-area high density plasma sources, Journal of applied physics, vol 86, n°10, Nov 1999. [15] J. Hopwood, Neutral gas temperature in a multipolar electron cyclotron resonance plasmas, Appl. Phys. lett 58 (22), 3 Jun,1991 [16] J.P. Verboncoeur, A.B. Langdon and N.T. Gladd, An Object -Oriented Electromagnetic PIC Code, Comp. Phys. Comm., 87, May11, 1995, pp. 199-211. [17] H. Kobayashi, A Bang-Bang Regulator and its Application to DC-Motor Speed Control, 24th Conference on Decision and Control, Ft. Lauderdale, FL, December 1985 [18] J. R. Wertz, Spacecraft Attitude Determination and Control, Kluwer Academic Publishers, 1978