-
8/11/2019 Csc 560 Project 5
1/35
CSC 560 Project 5 ReportJunnan LuKai Hung
1
-
8/11/2019 Csc 560 Project 5
2/35
Contents
IntroductionPyroelectric Infrared SensorsUltrasonic Ranging
Module HC-SR04 (Sonar Sensor)RTOSReal TermRadio Communication
Section
NRF24L01 Radio HardWareNRF24L01 introductionNRF24L01 Power
Management
NRF24L01 and Atmega1284P Wiring Diagram ATmega1284P/NRF24L01
Radio Serial Peripheral Interface
IntroductionSteps for reading data on SPI interface
Steps for writing data on SPI interfaceThe SPI Clock Polarity
and PhaseThe NRF24L01 Registers and Commands
The NRF24L01 RegistersThe NRF24L01 CommandsThe NRF24L01 Enhanced
Shock-Burst Data Packet Format
NRF24L01 Radio Driver The SS Pin On Atmega1284P Controller The
SPCR Register The SPDR Register
The SPSR Register The SPI ProgrammingThe SPI Interface
Configuration Steps
The NRF24L01 Radio Configuration Steps in SPIThe NRF24L01 Driver
Functions
The NRF24L01 Timing Diagram Atmega1284P/Roomba UART
CommunicationPut Everything Together
The Base Station Unit CheckoutThe Roomba Explore Unit
Checkout
The Whole System DiagramProject 5 C codeThe Video Demo
2
-
8/11/2019 Csc 560 Project 5
3/35
Introduction
In the last project report, we outline the overall design of the
Roomba Explorer system. Thesystem consisted of a Roomba and a radio
base station. Two PIR sensors and a sonar sensor were mounted on
the Roomba facing forwards. Once the Roomba detected amoving heat
emitting object, it would follow it at a fixed distance. Otherwise,
it would spinon the spot until it finds another target. This is
what happens when the robot is in Automode.
The Roomba can be directly controlled remotely through radio in
manual mode. TheRoomba can turn into auto mode or manual mode at
any time.
The actual implementation is not much different from the project
4 design.
Pyroelectric Infrared SensorsThe PIR sensor that we use is a
very simple one that has three pins. Two pins are groundand power
input. The last one is the output pin. Upon being active, the
output pin goes high(5V), otherwise it goes low(0V). This is
equivalent to digital output 0 or 1.
Figure 1. Infrared Sensor.
3
-
8/11/2019 Csc 560 Project 5
4/35
Figure 2. PIR Sensor.
The PIR sensor was pretty straight forward to use. When it
detected heat motion, the outputwent high (digital 1). The output
went low (digital 0) otherwise.
However, we observed that the output would stay high for a long
period, ranging from 1 to 7seconds. This was not very ideal since
it would output high voltage even when the movingobject is out of
sight. Inspite of the delay time, the whole system seemed to work
fine. Itwould be an interesting compare if we replace the PIR we
have with the ones that haveshorter delay time.
Here is the link to the data sheet of the PIR
sensor:(http://www.parallax.com/sites/default/files/downloads/910-28027-PIR-Sensor-REV-A-Documentation-v1.4.pdf
)
Figure X below shows how the PIR sensors were sampled. The
states of the PIRs (whether or not they are active) are stored in
global variables SENSOR0_ACTIVE andSENSOR1_ACTIVE respectively for
later use.
In our implementation, this function was a round-robin task.
However, as one can see, the
sampling operation is so fast ( (PIND & _BV(2))==0) and
((PIND & _BV(4)) ==0), it isprobably logical to take out this
function and simply incorporate the sampling operationswith the
rest of the code.
4
http://www.google.com/url?q=http%3A%2F%2Fwww.parallax.com%2Fsites%2Fdefault%2Ffiles%2Fdownloads%2F910-28027-PIR-Sensor-REV-A-Documentation-v1.4.pdf&sa=D&sntz=1&usg=AFQjCNFWqHVaulf4x8uj19wmMHLhweFH1ghttp://www.google.com/url?q=http%3A%2F%2Fwww.parallax.com%2Fsites%2Fdefault%2Ffiles%2Fdownloads%2F910-28027-PIR-Sensor-REV-A-Documentation-v1.4.pdf&sa=D&sntz=1&usg=AFQjCNFWqHVaulf4x8uj19wmMHLhweFH1g
-
8/11/2019 Csc 560 Project 5
5/35
Figure 3. Code segment of undate_sensor_state().
Ultrasonic Ranging Module HC-SR04 (Sonar Sensor)
The sonar sensor that we use has four pins; one for 5V power
supply, one for ground, onefor trigger pulse input and one for echo
pulse output
5
-
8/11/2019 Csc 560 Project 5
6/35
Figure 4. Sonar Distance Measurement.
The following is how it works:
1. Send a high level signal for at least 10 microseconds to the
trigger pin2. The module automatically sends eight 40kHz sound and
detect whether there is a soundbounces back. At the mean time, the
module raise the echo output to high.3. If the module detects a
sound pulse back, it sets the echo output low.4. Distance can be
calculated through the time interval between sending trigger signal
andreceiving echo signal. range = high level time * velocity
(340M/S) / 2
* It is suggested in the datasheet that there should be 60ms
time difference between eachmeasurements.
6
-
8/11/2019 Csc 560 Project 5
7/35
Figure 5. Sonar Timing Diagram.
The problem with working with sonar was that it is error prone.
For example, if the sonar sensor was facing a wall at an angle,
then it was very likely that the pulses the sonar sentout would
bounce off and never return to the sonar. In that case, the
distance could not bemeasured. We deal with the situations where
distance was not measured correctly by thesonar in software.
The figure below shows how the sonar was activated, sending high
signal to the trigger pinof sonar for 1ms. This function was set as
a periodic task with allowed execution time
200ms. Therefore, sonar was triggered periodically.
Figure 6.
The output pin of the sonar connects to input capture interrupt
2. The interrupt serviceroutine ISR(INT2_vect) calculate the
distance based on the input from sonar. On the risingegde event
(when the sonar is triggered), variable time_stamp_s1 captures the
time. Onthe falling edge event (sonar receives echo sound pulse),
variable time_stamp_s2
7
-
8/11/2019 Csc 560 Project 5
8/35
captures the time. The time difference can be directly used to
calculate the distance.Please read the comments in the code for
details.
Figure 7.
RTOS
The RTOS we choose to use was developed by previous students
Scott Craig and JustinTanner in fall 2007 who were taking the exact
same class. We developed our own RTOS inproject 3, however, we feel
more comfortable using this one since it seemed to be robustand
extensively tested.
For details of this RTOS, please refer to the following
website.
http://webhome.csc.uvic.ca/~mcheng/460/summer.2013/handouts/project2/RTOS%20report/index.html
Here; A, B, C, . G represent the tasks. And the PPP[] array
holds all of the periodictasks name and worst time duration. The
duration is specified as number of ticks. In our case, one tick is
5ms. If a periodic task reaches Task_Next(), round-robin tasks get
to run.
One has to rename their main() to be r_main(). Because in C,
there can only be one main()and it is used by the RTOS. In the
r_main(), the tasks are created in the following manner.
Figure 8.
8
http://www.google.com/url?q=http%3A%2F%2Fwebhome.csc.uvic.ca%2F~mcheng%2F460%2Fsummer.2013%2Fhandouts%2Fproject2%2FRTOS%2520report%2Findex.html&sa=D&sntz=1&usg=AFQjCNHXpwSL6NSmQSbA-2L8PGKbZmOvtwhttp://www.google.com/url?q=http%3A%2F%2Fwebhome.csc.uvic.ca%2F~mcheng%2F460%2Fsummer.2013%2Fhandouts%2Fproject2%2FRTOS%2520report%2Findex.html&sa=D&sntz=1&usg=AFQjCNHXpwSL6NSmQSbA-2L8PGKbZmOvtw
-
8/11/2019 Csc 560 Project 5
9/35
Real Term
We use real term to send data to the microcontroller through
UART and the microcontroller will in turn sends data to roomba
through radio. In our case, the microcontroller connectedto the
computer through COM port 6. For parameters of UART and how to set
up UARTconnection, please refer to the following figure.
Figure 9. The RealTerm, our command control interface.
We are sending a single ACII character to the microcontroller.
The following figure shows
an example.
9
-
8/11/2019 Csc 560 Project 5
10/35
Figure 10. RealTerm continued.
Radio Communication Section
NRF24L01 Radio HardWare
NRF24L01 introduction
The NRF24L01 is a single chip 2.4GHZ transceiver with baseband
protocol engine , theEnhanced Shock Burst. The NRF24L01 radio is
designed for operation in world wide ISMfrequency band at
2.400-2.4835 GHZ.
The Nordic nRF24L01 integrates a complete 2.4GHz RF transceiver,
RF synthesizer, andbaseband logic including the Enhanced ShockBurst
hardware protocol accelerator supporting a high-speed SPI interface
for the application controller. The low-power short-range (200 feet
or so)Transceiver is available on a board with built-in
Antenna.
10
-
8/11/2019 Csc 560 Project 5
11/35
NRF24L01 Power Management
The Base Station Atmega1284P Xpld controller is powered via the
USB connector from aPC supplying 5V power. The Atmega1284P Xpld
supply 5V power to the NRF24L01 by
connecting the NRF24L01 Vcc pin to Atmega1284P Vcc_5V pin. The
power supplied tothe NRF24L01 is regulated by the LDO power
regulator, on board of NRF24L01. Therange of input to the NRF24L01
LDO regulator is from 3.3V to 7V.
NRF24L01 and Atmega1284P Wiring Diagram
Figure 11. The Base Station NRF24L01/ATmega1284P Wiring
Diagram
In our implementation of the Base Station, the NRF24L01 is
directly connected with the ATmega1284P controller, just as the
figure shown above. The discussion of the NRF24L01pins are listed
as fellow.
GND Pin
11
-
8/11/2019 Csc 560 Project 5
12/35
The ground Pin of NRF24L01 is connected to the GND Pin (Pin
number needed here) of the Atmega1284P microcontroller.
VCC
The VCC pin of NRF24L01 is connected to the VCC_5V pin of the
Atmega1284P. Thepower supply to the NRF24L01 is 5V. And as mention
before, the LDO power regulator onthe NRF24L01 board regulates the
input power to 3.3V to power the NRF24L01 radio.
IRQ
The IRQ pin is not connected to any of the pins from the
Atmega1284P microcontroller. It isconnected to the Logic Analyzer
for testing. The NRF24L01 has an active low interrupt pin.
The purpose of the connecting IRQ pin is to check if the radio
is sending and receivingsuccessfully. The IRQ is activated when any
of the transmitting, receiving, or reachingmaximum retransmission
limits of the data packets occurring. The result will be resulted
inthe corresponding bits of the STATUS register of the NRF24L01
radio. The logic analyzer timing diagram of the NRF24L01 will be
shown later.
MISO
This pin is connected to the MISO pin of the Atmega1284P
microcontroller. The
NRF24L01 is the slave device. Thus, the serial out pin for
NRF24L01 is the MISO. Whenthe NRF24L01 will shift 8 bit value of
STATUS register to the Atmega1284P Xpldmicrocontroller by using
this pin.
MOSI
The Atmega1284P Xpld controller is the master device. The
Atmega1284P places thedata ,in byte format, in the shift register
and shift the data to NRF24L01 radio.
SCK
The SCK pin of the NRF24L01 is connected to the SPI sck pin. In
SPI interface, the shiftregister is 8 bits long. After 8 pulses,
the content in both of the MOSI and MISO are shifted.When
ATmega1284P Xpld, the master device, sends data to the
NRF24L01,
ATmega1284P Xpld controller places data on the MOSI register and
generates 8 clockpulses. And when Atmega1284P controller wants to
receive data, the NRF24L01 will place
12
-
8/11/2019 Csc 560 Project 5
13/35
the data on the MISO register. After 8 clock pulses generated by
the ATmega1284P Xpld,the data will be received by the
microcontroller.
CSN
The CSN pin of the NRF24L01 is connected to the PB2 pin on
Atmega1284P. After thehigh to low transition of this pin,
Atmega1284P can shift the command or data to theNRF24L01 radio.
CE
The CE pin is connected to PB1 pin on Atmega1284P. The NRF24L01
radio will be instandby mode I after about 13.8 milliseconds after
setting the PWR_UP bit of the CONFIGregister. The operation mode of
the NRF24L01 radio will be changed by setting transitions
of the CE pin. The NRF24L01 operation state diagram is
fellow.
13
-
8/11/2019 Csc 560 Project 5
14/35
-
8/11/2019 Csc 560 Project 5
15/35
-
8/11/2019 Csc 560 Project 5
16/35
The CSN pin is used to control the SPI bus. We need to keep this
pin low when we sendcommands to or read value from the NRF24L01
radio device.
Steps for reading data on SPI interface
1. High to low transition on CE pin to change operation mode to
radio operationmode.
2. High to low transition on CSN pin to start reading cycle .3.
With each pulse of the SCK, the 8 bit command data is shifted at 1
bit at a pulse.4. After all 8 bit command is shifted from
Atmega1284P controller to NRF24L01 radio
via MOSI pin, the data from NRF24L01 is shifted at 1 bit at a
SCK pulse fromNRF24L01 to Atmega1284P controller via MISO pin.
5. Low to High transition on CSN pin to end the reading cycle.6.
Low to High transition on CE pin to change back to standby
mode.
Figure 14. The SPI read operation.
Steps for writing data on SPI interface
1. High to low transition on CE pin to change operation mode to
radio operation
mode.2. High to low transition on CSN pin to start reading cycle
.3. With each pulse of the SCK, the 8 bit command data is shifted
at 1 bit at a pulse.4. After all 8 bit command is shifted from
Atmega1284P controller to NRF24L01 radio
via MOSI pin, the data from NRF24L01 is shifted at 1 bit at a
SCK pulse fromNRF24L01 to Atmega1284P controller via MISO pin.
16
-
8/11/2019 Csc 560 Project 5
17/35
5. Low to High transition on CSN pin to end the reading cycle.6.
Low to High transition on CE pin to change back to standby
mode.
Figure 15. The SPI write operation.
The SPI Clock Polarity and Phase
There are four modes of SPI phase and polarity with respect to
serial data, which aredetermined by control bits CPHA and CPOL of
the SPCR register on ATmega1284P. Thefour SPI modes are shown as
the figure below.
Figure 16. SPI modes.
In our implementation, the SPI mode is setted to mode 0. The
CPHA and CPOL bits aredefaulted when we set the SPCR register. The
programming detail is shown in NRF24L01driver section. The figure
below shows the SPI data transfer format between
Atmega1284P Xpld and the NRF24L01 radio. Again, the mode 0 is
our SPI mode.
17
-
8/11/2019 Csc 560 Project 5
18/35
Figure 17. SPI data transfer mode 0.
The NRF24L01 Registers and Commands
The NRF24L01 Registers
The following NRF24L01 registers are used to set up and
configure the NRF24L01 radio. And each of the registers are 5 bits
that is masked by W_REGISTER and R_REGISTERinstruction. For the
detail of the registers, please check the NRF24L01 datasheet.
1. CONFIG, the configuration register.2. EN_AA, Enable Auto
Acknowledgment Function Disable this functionality to be
compatible with nRF2401.3. EN_RXADDR, Enabled RX Addresses.
4. RX_PW_P0, Number of bytes in RX payload in data pipe 0 (1 to
32 bytes). In thisimplementation, the number of bytes is 32
bytes.5. SETUP_AW, Setup of Address Widths, in our case, it is 5
bytes address width.6. RF_CH, set the frequency channel that
NRF24L01 operates on. In this project we
set the frequency channel to 5.7. RF_SETUP, sets the air data
rate. We sets the air data rate to 2Mbps.8. RX_ADDR_P0, sets the 5
bytes long receiving data pipe 0 address. The 5 bytes
18
-
8/11/2019 Csc 560 Project 5
19/35
address will be assembled to the NRF24L01 data packet which will
be discussedlater.
9. TX_ADDR, Transmit address. Used for a PTX device only.Set
RX_ADDR_P0equal to this address to handle automatic acknowledge if
this is a PTX device withEnhanced ShockBurst enabled.
10. SETUP_RETR, Setup of Automatic Retransmission, Auto
Retransmit Delay and Auto Retransmit Count. In this project, we set
the auto retransmit delay andretransmit count to 4000S and 15
Re-Transmit respectively.
11. STATUS, Status Register In parallel to the SPI command word
applied on the MOSIpin, the STATUS register is shifted serially out
on the MISO pin. We read the valuefrom the STATUS register to check
the status of NRF24L01.
The NRF24L01 Commands
The following NRF24L01 commands are used in our radio driver
implementation.
1. R_REGISTER, masks 3 most significant bits and reads 5 bit
width commands andvalue of the status registers from the
NRF24L01.
2. W_REGISTER,masks 3 most significant bits and writes 5 bit
width commands andvalue of the status registers from the
NRF24L01.
3. R_RX_PAYLOAD, reads the 32 bytes data payload. The payload is
deleted fromFIFO after it is read. This commands is used for radio
in receiving mode. TheNRF24L01 on Roomba explore unit executes this
command.
4. W_TX_PAYLOAD, writes the 32 bytes data to transmission
payload.5. FLUSH_TX, flushes transmission FIFO.6. FLUSH_RX, flushes
receiving FIFO.
The NRF24L01 Enhanced Shock-Burst Data Packet Format
The Enhanced Shock-Burst packet contains a preamble field,
address field, packetcontrol field, payload field and a CRC
field.
Figure 18. The Enhanced Shock-Burst packet with Payload from 0
to 32 byte.
19
-
8/11/2019 Csc 560 Project 5
20/35
In our implementation, we set the packet payload to 32 bytes,
address to 5 bytes and cyclicredundancy check (CRC) to 2 bytes. The
data packet configuration will be shown in thecode section.
NRF24L01 Radio Driver
In this section, we will discuss the Radio Driver programming.
The Radio Driver isconsisted of 2 parts. They are SPI programming
in Atmega1284P and the shiftingNRF24L01 commands using SPI
interface.
The following three SPI registers are used to configure the SPI
interface in radio driver.
1. SPCR, SPI control register.2. SPSR, SPI status register.3.
SPDR, SPI data register.
The SS Pin On Atmega1284P Controller
It is also important to mention here. In our implementation, the
Atmega1284P controller isconfigured as the master device. The SPI
interface has no automatic control of the SS pinwhen the
Atmega1284P controller is configured as the master device. Thus, we
must setthe value to SS pin before the communication can start. The
SS pin on Atmega1284P isassociated to the 8th bit of PORTB. The
programming detail will be discussed in the SPIprogramming
section.
The SPCR Register
The SPI control register, SPCR, controls the operation of the
SPI interface. The SPCRdefinition is shown in following figure.
20
-
8/11/2019 Csc 560 Project 5
21/35
Figure 19. The SPCR register.
First of all, we must enable the SPI interface. This can be done
by setting the SPE bit of theSPCR register to 1. Next, as mentioned
before, we configured the Atmega1284Pcontroller as the master
device. Thus, we must set the MSTR bit to 1 as well. Finally,
wemust make sure that the Atmega1284P and NRF24L01 agree on the SCK
frequency. Wedo this by setting the SPR0 bit of the SPCR to 1. The
programming detail will be discussedin the SPI programming
section.
21
-
8/11/2019 Csc 560 Project 5
22/35
The SPDR Register
The SPDR register is the read/write register of the SPI
interface. Caution for using the
SPDR register. To avoid data collision, we can only write to
SPDR after the last byte of transmission is completed. However, we
can read from SPDR before data is completelytransmitted. The
following figure shows the SPDR definition.
Figure 20. The SPDR register.
The SPSR Register
The SPSR register is used to detect when the SPI data transfer
is completed. The detail of SPSR is shown as the figure below. The
programming detail will be discussed in the SPI
programming section.
22
-
8/11/2019 Csc 560 Project 5
23/35
Figure 21. The SPSR register.
An interrupt is generated if SPIE bit in SPCR is set and global
interrupts are enabled. If thenegative of the SS is an input and is
driven low when the SPI is in Master mode, this willalso set the
SPIF Flag. In our case the SS pin is set high and the Atmega1284P
isconfigured as the master device. Thus, the SPIF flag will be
setted.
The SPI Programming
Now we can program the Atmega1284P SPI interface to achieve data
communicationback and forth between the NRF24L01 radio. As
mentioned before, the Atmega1284P
23
-
8/11/2019 Csc 560 Project 5
24/35
Xpld controller is configured as the master device. The SPI
configuration code is shownbelow.
Figure 22. The Atmega1284P SPI configuration.
The SPI Interface Configuration Steps
The C code above shows the steps of how we configure the SPI
interface between the ATmega1284P controller and the NRF24L01
radio.
1. The DDRB register is setted as code above. As shown in the
ATmega1284P/NRF24L01 wiring diagram, we configured that the output
pin on Atmega1284P as fellow, MOSI, SCK, CSN and CE. The CE, CSN,
MOSI and SCKare PORTB pin 1, 3, 5 and 7 respectively. And because
the Atmega1284P
controller is operating in master mode, we need to set the SS
pin high as well. TheSS pin is the PORTB pin 4. The MISO, PORTB pin
6, is used to read input SPI datafrom the NRF24L01.
2. Set the SPCR register to enable SPI interface, master mode
and SCK frequency.The SPE, MSTR and SPR0 bits are discussed in the
SPI registers section.
3. After configured the SPI interface, we can send commands and
data to configurethe NRF24L01 radio. The NRF24L01 configuration
commands is defined in the
24
-
8/11/2019 Csc 560 Project 5
25/35
RX_setup() function. The function will be discussed in the next
section.4. After configured the NRF24L01 settings, we can set the
operation mode of the
NRF24L01 radio. The RX_mode() and TX_mode() functions are used
to configureNRF24L01 radio as either receiving mode or transmission
mode.
The NRF24L01 Radio Configuration Steps in SPI
Figure 22. The NRF24L01 setup.
After configured the SPI interface between Atmega1284P
controller and the NRF24L01radio, now we can send commands to
NRF24L01 to configure its settings. This is done byfollowing
steps.
1. By setting high to low transition of the CE pin, the NRF24L01
is in the standbymode.
2. Enable auto acknowledgement. The transmitter gets ACK back
from the receiver.
25
-
8/11/2019 Csc 560 Project 5
26/35
3. Enable data pipe 0 as the RX address.4. Set the payload width
to 32 bytes. In our implementation, the NRF24L01 data
packet payload size is 32 bytes. That is we send 32 bytes for
every outbound datapacket.
5. Set the receiver address width to 5 bytes.6. Set the RF
channel to 5.7. Set the power mode and air data rate. In our
implementation the power mode is
0dBm. And the air data rate is 2 Mbps.8. Set the receiver data
pipe 0 address. In our implementation, the receiving address
for receiver is 0x2424242424.9. For receiver, the transmission
address should be the same as the receiving
address, if the auto ACK is enabled.10. Finally, we have to
setup the retransmission settings. In our implementation, we
set
the auto retransmission delay to 750us. And the number of retry
is 15. Again thedetail of the SETUP_RETR register is listed in the
NRF24L01 data sheet.
The NRF24L01 Driver Functions
spi_command(unsigned char v)
Both of the spi_Wreg_command and spi_buf_command functions call
the spi_commandfunction to pass the data to the destination
NRF24L01 registers. The spi_command is the
basic function to send and receive data to and from the NRF24L01
device. It has only oneparameter v. The variable v is used to
define both the NRF24L01 register and as well asthe value to that
register. For example, in spi_Wreg_command function, the
spi_commandwill be called twice. The first time call of the
spi_command is to enter the address of theNRF24L01 register. After
entering the register address, the spi_command will be called
toenter the value for that register. The coding detail will be
shown in the code section.
spi_Rreg_command(unsigned char reg)
This function is used to send NRF24L01 commands to the NRF24L01
device. User needto put the NRF24L01 command such as TX_FLUSH or
RX_FLUSH as the parameter.
spi_Wreg_command(unsigned char reg, unsigned char v)
This function is used to write a single data to the NRF24L01
registers through the SPIinterface. They are two parameters in this
function. The first parameter is the name of the
26
-
8/11/2019 Csc 560 Project 5
27/35
register that we want to write the data to. The second parameter
is the value of the datathat the register will get.
spi_buf_command(unsigned char reg, unsigned char v[], int
length)
This function is used to write an array of data to the NRF24L01
registers. For example, if we want to enter the 5 bytes address for
the transmitter, we could use this function
asspi_buf_command(TX_ADDR, Address, 5). The reg parameter here
again is the name of the NRF24L01 register that we want to write
to. The v[] character array contains the 5 bytesaddress, such as
0x2424242424. And the length, of course, is the length of the
addressarray. In this case, it is 5 bytes long.
TX_send(void)
The TX_send is used for transmission device to transmit the data
packet to the receivingdevice. In our design and implementation,
the Base Station is the transmitter. And theRoomba Explore is the
receiver, The Base Station calls TX_send to send Roombacommands
data packets to the Roomba Explore.
RX_Rece(void)
The RX_Rece is used for receiving device to receive the data
packet from the
transmission device. As mention above, the Roomba Explore is the
receiver. And theRoomba Explore calls the RX_Rece to receive Roomba
commands data packets from theBase Station.
TX_mode(void)
This function is used to define the NRF24L01 operation mode. As
mentioned above, theBase Station is the transmission device. Thus
the Base Station calls TX_mode to set itsNRF24L01 to transmission
mode.
RX_mode(void)
Similar to the TX_mode, the Roomba Explore is the receiver. Thus
the system on theRoomba Explore must call RX_mode to set the
NRF24L01 on the Roomba Explore toreceiving mode.
27
-
8/11/2019 Csc 560 Project 5
28/35
The NRF24L01 Timing Diagram
Figure 23. Entering commands to NRF24L01 radio.
Figure above shows the command data being transmitted from the
Atmega1284Pcontroller to the NRF24L01 radio. The CE pin must be
kept low for entering command tothe NRF24L01 radio. Each pulse of
the CSN pin signals the start and finish of eachcommand. The
command data is represented by the MOSI. As the command binary bits
is
being shifted at each SCK clock pulse. The NRF24L01 status is
shifted from theNRF24L01 radio to the Atmega1284P controller via
MISO pin.
28
-
8/11/2019 Csc 560 Project 5
29/35
Figure 24. The NRF24L01 receiving data packets from the air.
Figure Above shows that the NRF24L01 radio is in receiving mode.
The CE pin is kepthigh as the NRF24L01 radio is monitoring the air.
The value of the CONFIG register isshifted from the NRF24L01
register to the ATmega1284P controller via MISO. Once theNRF24L01
radio receives the data packet from the transmitter device. The
second mostsignificant bit of the CONFIG register, MASK_RX_DR, is
set high. And once theNRF24L01 radio receive data packet, the CE
pin will be held low. All of the RX_DR,TX_DS and MAX_RT will be
reflected on the IRQ pin. In this case, the IRQ pin is reflectedby
the interrupt on RX_DR.
Atmega1284P/Roomba UART Communication
The detail of Atmega1284P/Roomba UART Communication is mentioned
in our Project 2.In this project, the NRF24L01 radio, installed on
the Roomba Explore unit, is the receiver device. And it receives
Roomba command packet from the base station. We can sendRoomba
commands such as F (forward), B(backward), R(right turn), L(left
turn) andS(stop) from the base station.
radio_receiving(void)
The radio_receiving() function is used on the Roomba Explore
unit. This function is used toreceive the Roomba command data
packets from the base station. Once the Roombacommand data packets
are received by the Roomba Explore unit, the
radio_receiving()function will extract the payload of the packet
and send command to the Roomba robot viaUART connection.
29
-
8/11/2019 Csc 560 Project 5
30/35
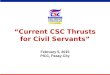
Figure 25. State diagram of the radio_receiving() function.
As figure X shows above, in order to control the Roomba
remotely, there are four stepsimplemented in the radio_receiving()
function. In this project, we are not reading any datafrom the
Roomba. Thus the data communication between the Atmega1284P
controller andthe Roomba is one way.
Step 1, receiving the data packets from the base station.Step 2,
extracting the payload message from the data packet and selecting
the commandby using switch statement.Step 3, creating UART data
packet base on the switch statement.Step 4, sending UART data
packet to Roomba.
30
-
8/11/2019 Csc 560 Project 5
31/35
The implementation of the radio_receiving() function is in the
coding section.
Put Everything Together
The Base Station Unit Checkout
1. Connecting the SparkFun NRF24L01 radio with Atmega1284P board
via SPIinterface connections. The power supply to NRF24L01 is 5V
from the
Atmega1284P microcontroller. Our NRF24L01 radio includes an on
board LDOpower regulator. The allowed power supply range is 3.3V to
7V. Thus 5V power is inthe range. At this moment, our Base Station
microcontroller is not connected to anycomputer with power supply.
Thus, there is no power supply to the NRF24L01 radioyet.
2. The Atmega1284P Xpld controller is connected to a running
computer via USBcable. Thus our Base Station microcontroller is
powered via USB cable. The power supplied from the PC is regulated
to 3.3V with the LDO power regulator on the
Atmega1284P Xpld board to supply power to the entire board.
3. The Base Station microcontroller reads user input from the
USART interfaceconnected to the on board AT32UC3B1256 chip. The on
board AT32UC3B1256chip is connected to a PC via USB cable. The data
transmitted from the PC ispassed to a virtual COM port then to the
Atmega1284P Xpld controller.
31
-
8/11/2019 Csc 560 Project 5
32/35
The Roomba Explore Unit Checkout
1. Connecting PIR sensors to port D 2 and 4 on Atmega1284P
controller.2. Connecting Sonar distance measurement to Atmega1284P
controller. The sonar
echo pin is connected to Atmega1284P port c 0. The trigger pin
is connected to Atmega1284P port b 2.
3. Connecting NRF24L01 radio to Atmega1284P controller. The
wiring detail is shownin the figure 27.
4. Connecting Atmega1284P controller to Roomba via UART
communication channel.The wiring detail is shown in the figure
27.
5. The power supply is 14.4 V from the Roomba battery. The 14.4
V power isregulated to 5V by using the 7805 power regulator. The
regulated 5V power issupplied to all the devices on the Roomba
Explore unit.
32
-
8/11/2019 Csc 560 Project 5
33/35
Figure 26. Roomba Robot Unit Wiring Diagram.
33
-
8/11/2019 Csc 560 Project 5
34/35
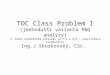
The Whole System Diagram
Figure 27. Our system diagram.
Project 5 C code
The Base Station source code can be downloaded at
http://web.uvic.ca/~byzantin/base_station.zip
The Roomba Explore Unit source code can be downloaded
athttp://web.uvic.ca/~byzantin/Project2_RTOS.zip
34
http://www.google.com/url?q=http%3A%2F%2Fweb.uvic.ca%2F~byzantin%2FProject2_RTOS.zip&sa=D&sntz=1&usg=AFQjCNFZnP9LFbrhBvEs-hAZdJpWihogoQhttp://www.google.com/url?q=http%3A%2F%2Fweb.uvic.ca%2F~byzantin%2Fbase_station.zip&sa=D&sntz=1&usg=AFQjCNH_vBWp0Rp4kfyuXFrK-FXlJne1aQ
-
8/11/2019 Csc 560 Project 5
35/35
The Video Demo
Our project video demo can be found here :
http://www.youtube.com/watch?v=VeZTy8s4KSU
http://www.youtube.com/watch?v=VeZTy8s4KSU