Embed Size (px)
Citation preview
CURRICULUM VITAE
DR. EDUARDO ARANDA BRICAIRE
Febrero 2013
1. DATOS GENERALES
Lugar de nacimiento: México, D.F.
Fecha de nacimiento: 23 de Abril de 1967.
Estado Civil: Soltero.
Domicilio Laboral: Departamento de Ingeniería Eléctrica, CINVESTAV, Av. IPN No.2508, Colonia San Pedro Zacatenco, 07360 México, D. F. Teléfono: (55) 57473865,Fax: (55) 57473866, E-mail: [email protected]
Escolaridad:
Doctor en Ciencias, Ecole Centrale de Nantes y Université de Nantes, Nantes,Francia, 10 de Junio de 1994.
Maestro en Ciencias en Ingeniería Eléctrica, Sección de Control Automático,Departamento de Ingeniería Eléctrica, Centro de Investigación y de EstudiosAvanzados del I.P.N., 28 de Junio de 1991.
Ingeniero Industrial en Eléctrica, Instituto Tecnológico de Pachuca, 23 de Junio de1989.
Estancias de Investigación:
Postdoctoral fellow, Department of Mathematics and Statistics, Queen's University,Kingston, Canada, del 1 de Septiembre de 1995 al 31 de agosto de 1996.
Chercheur Invité, Institut de Recherche en Communications et Cybernétique deNantes, Nantes, Francia, del 15 de junio al 15 de septiembre de 2001.
Professeur Invité, Ecole Centrales de Nantes, Nantes, Francia, del 1 al 30 de juniode 2005, del 1 al 30 de abril de 2006 y del 1 al 30 de noviembre de 2006.
Investigador Invitado (Receso sabático), Programa de Investigación enMatemáticas Aplicadas y Computación, Instituto Mexicano del Petróleo, México, DF,del 5 de noviembre de 2001 al 4 de noviembre de 2002.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 1 -
Cargos y puestos ocupados
Instructor A, Departamento de Ingeniería Eléctrica del CINVESTAV, del 1 de agostode 1993 al 15 de julio de 1994.
Investigador CINVESTAV 2-B, Departamento de Ingeniería Eléctrica del CINVESTAV,del 15 de julio de 1994 al 1 de abril de 1995.
Investigador CINVESTAV 2-C, Departamento de Ingeniería Eléctrica del CINVESTAV,del 1 de abril de 1995 al 31 de marzo de 1997.
Investigador CINVESTAV 3-A, Departamento de Ingeniería Eléctrica del CINVESTAV,del 1 de abril de 1997 al 31 de marzo de 2000.
Investigador CINVESTAV 3-B, Departamento de Ingeniería Eléctrica del CINVESTAV,del 1 de abril de 2000 al 31 de marzo de 2009.
Investigador CINVESTAV 3-C, Departamento de Ingeniería Eléctrica del CINVESTAV,del 1 de abril de 2009 a la fecha.
Coordinador Académico, Sección de Mecatrónica, Departamento de IngenieríaEléctrica del CINVESTAV, del 16 de febrero de 1999 al 31 de octubre de 2000.
Jefe de Sección, Sección de Mecatrónica, Departamento de Ingeniería Eléctrica delCINVESTAV, del 1 de noviembre de 2000 al 31 de marzo de 2001.
Posición y categoría actuales: Investigador CINVESTAV 3-C, Sección deMecatrónica, Departamento de Ingeniería Eléctrica, CINVESTAV-IPN.
Sistema Nacional de Investigadores
Candidato a Investigador Nacional, del 1 de julio de 1992 al 30 de junio de 1996.
Investigador Nacional Nivel I, del 1 de julio de 1996 al 30 de junio de 1999, del 1de julio de 1999 al 30 de junio de 2002, del 1 de julio de 2002 al 31 de diciembre de2005, del 1 de enero de 2006 al 31 de diciembre de 2009 y del 1 de enero de 2010al 31 de diciembre de 2013.
2. PRODUCTOS DE INVESTIGACION O DESARROLLO
2.1. Artículos originales de investigación
2.1.a. Publicados en extenso en revistas de prestigio internacional con arbitrajeestricto.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 2 -
2.1.a.1. E. Aranda-Bricaire, C.H. Moog, J.-B. Pomet, A Linear Algebraic Framework forDynamic Feedback Linearization, IEEE Transactions on Automatic Control, Vol. 40, No.1, January 1995, pp. 127-132.
2.1.a.2. E. Aranda-Bricaire, U. Kotta, C.H. Moog, Linearization of discrete-timesystems, SIAM Journal on Control and Optimization, Vol. 34, No. 6, December 1996, pp.1999-2023.
2.1.a.3. E. Aranda-Bricaire, R.M. Hirschorn, Equivalence of nonlinear systems to primesystems under generalized output transformations, SIAM Journal on Control andOptimization, Volume 37, Number 1, 1999, pp. 118-130.
2.1.a.4. E. Aranda-Bricaire, U. Kotta, Equivalence of discrete-time nonlinear systems toprime systems, Journal of Mathematical Systems, Estimation and Control, Volume 8,Number 4, 1998, pp. 471-474.
2.1.a.5. R.M. Hirschorn, E. Aranda-Bricaire, Global approximate output tracking fornonlinear systems, IEEE Transactions on Automatic Control, Volume 43, Number 10,1998, pp. 1389-1398.
2.1.a.6. S. Celikovsky, E. Aranda-Bricaire, Constructive nonsmooth stabilization oftriangular systems, Systems & Control Letters, Volume 36, Number 1, 1999, pp. 21-37.
2.1.a.7. E. Aranda-Bricaire, U. Kotta, Generalized controlled invariance for discrete-time nonlinear systems with an application to the dynamic disturbance decouplingproblem, IEEE Transactions on Automatic Control, Vol. 46, No. 1, January 2001, pp.165-171.
2.1.a.8. E. Aranda-Bricaire, T. Salgado-Jiménez, M. Velasco-Villa, Control no linealdiscontinuo de un robot móvil, Revista Computación y Sistemas, No. Especial EdiciónDiciembre 2002, pp. 42-49.
2.1.a.9. R. Orosco-Guerrero, E. Aranda-Bricaire, M. Velasco-Villa, Modelado y controlde un robot móvil para la tracción de n remolques actuados, Información Tecnológica,Vol. 14, No. 3, 2003, pp. 131-140.
2.1.a.10. E. Aranda-Bricaire, U. Kotta, A geometric solution to the dynamic disturbancedecoupling for discrete-time nonlinear systems, Kybernetika, Vol. 40, No. 2, 2004, pp.197-206.
2.1.a.11. E. Aranda Bricaire, C.H. Moog, Invariant codistributions and the feedforwardform for discrete-time nonlinear systems, Systems & Control Letters, Vol. 52, No. 2,June 2004, pp. 113-122.
2.1.a.12. P. A. Niño-Suárez, E. Aranda-Bricaire, M. Velasco-Villa, Control mediantemodos deslizantes en tiempo discreto para el seguimiento de trayectorias de un robot
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 3 -
móvil, Revista Iberoamericana de Automática e Informática Industrial, Vol. 4, No. 4,2007, pp. 31-38.
2.1.a.13. E. Aranda Bricaire, C.H. Moog, Linearization of discrete-time systems byexogenous dynamic feedback, Automatica, Vol. 44, No. 7, Julio, 2008, pp. 1707-1717.
2.1.a.14. M. Velasco-Villa, E. Aranda-Bricaire, R. Orosco-Guerrero, Discrete-TimeModeling and Path-Tracking for a Wheeled Mobile Robot, Computación y Sistemas,Revista Iberoamericana de Computación, Vol. 13, No. 2, Octubre 2009, pp. 142-160.
2.1.a.15. A. Sanchez, E. Aranda-Bricaire, F. Jaimes, E. Hernandez, A. Nava, Synthesisof product-driven coordination controllers for a class of discrete-event manufacturingsystems, Robotics and Computer Integrated Manufacturing, Vol. 26, No. 4, August2010, pp.361-369.
2.1.a.16. E. G. Hernández-Martínez, E. Aranda-Bricaire, Decentralized FormationControl of Multi-Agent Robot Systems based of Formation Graphs, Studies inInformatics and Control, Vol. 21, No. 1, 2012, pp. 7-16. ISSN 1220-1766
2.1.a.17. E. G. Hernández-Martínez, E. Aranda-Bricaire, Non-Collision Conditions inMulti-agent Virtual Leader-Based Formation Control, International Journal of AdvancedRobotic Systems, Vol. 9, No. 1, 2012, pp. 1-10. ISSN 1729-8806.
2.1.a.18. M. Velasco-Villa, E. Aranda-Bricaire, H. Rodríguez-Cortés, J.González-Sierra,Trajectory Tracking for a Wheeled Mobile Robot Using a Vision Based PositioningSystem and an Attitude Observer, European Journal of Control, Vol. 18, No. 4, 2012, pp.348-355. ISSN 0947-3580.
2.1.a.19. J. González-Sierra, E. Aranda-Bricaire, E. G. Hernández-Martínez, FormationTracking with Orientation Convergence for Groups of Unicycles, International Journal ofAdvanced Robotic Systems, 10:180, 2013. Print ISSN 1729-8806. Online ISSN 1729-8814. DOI: 10.5772/55582.
2.1.a.20. J. González-Sierra, E. Aranda-Bricaire, D. E. Hernández-Mendoza, Emulationof n−trailer Systems through Unicycle-type Multi-Agent Systems: Continuous andDiscrete-Time Approaches, Journal of Intelligent & Robotic Systems, Vol. 75, pp. 129-146. Springer Netherlands, 2014, ISSN 0921-0296, doi 10.1007/s10846-013-0002-9.http://link.springer.com/article/10.1007%2Fs10846-013-0002-9
2.1.a.21. J. F. Flores-Resendiz, E. Aranda-Bricaire, J. González-Sierra, J. Santiaguillo-Salinas, Finite-Time Formation Control without Collisions for Multiagent Systems withCommunication Graphs Composed of Cyclic Paths, Mathematical Problems inEngineering, Vol. 2015, Hindawi Publishing Corporation, http://dx.doi.org/10.1155/2015/948086
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 4 -
2.1.b. Publicados en extenso en otras revistas especializadas, con arbitraje.
2.1.b.1. P. Niño-Suárez, M. Velasco Villa, E. Aranda-Bricaire, Discretización exacta deun robot móvil con retardo de transporte, Ciencia e Ingeniería Neogranadina, Vol. 16,No. 1, Agosto 2006, pp. 43-53.
2.1.b.2. J. González-Sierra, J. Santiaguillo-Salinas, E. Aranda-Bricaire, Reducción delos efectos de sobreviraje para un tráiler virtual, AMRob Journal, Robotics: Theory andApplications, Vol. 2, No. 3, pp. 73-78, 2014, ISSN 2007-7114.
2.1.b.3. J. Santiaguillo-Salinas, E. Aranda-Bricaire. Time-varying containment controlfor multi-agent robot systems with general formation graphs, AMRob Journal, Robotics:Theory and Applications, Vol. 2, No. 3, pp. 79-85, Agosto 2014. ISSN 2007-7114.
2.1.b.4. M. Méndez-Martínez, J. González-Sierra, E. Aranda-Bricaire, Control de vueloen configuración líder–seguidor para aeronaves tipo cuadrirrotor, AMRob Journal,Robotics: Theory and Applications, Vol. 3, No. 1, pp. 17-22, ISSN: 2007–7114
2.1.b.5. G.R. Peñaloza-Mendoza, D.E. Hernández-Mendoza, E. Aranda-Bricaire,Discrete-Time Time-Varying Formation Control for Multi-Agent Systems Applied to n-trailer Configuration, AMRob Journal, Robotics: Theory and Applications, Vol. 3, No. 2,pp. 37-42, ISSN: 2007–7114
2.1.c. Publicados en extenso en memorias de congresos internacionales, conarbitraje.
2.1.c.1. J. Alvarez, E. Aranda, Control Adaptable de una Clase de Sistemas no LinealesSingularmente Perturbados, Memorias del V Congreso Latino-Americano de ControlAutomático, Vol. 1, pp. 256-261, La Habana, Cuba, Febrero 1992.
2.1.c.2. G. Silva-Navarro, J. Alvarez-Gallegos, E. Aranda-Bricaire, Sliding-ModeControl for Nonlinear Singularly Perturbed Systems, Memorias del 2do. IFAC NOLCOSSymposium, pp. 459-464, Bordeaux, Francia, Junio 1992.
2.1.c.3. J.-B. Pomet, C.H. Moog, E. Aranda, A non-exact Brunovsky Form a DynamicFeedback Linearization, Memorias de la 31 IEEE Conference on Desicion and Control,Vol. 2, pp. 2012-2017, Tucson, U.S.A., Diciembre 1992.
2.1.c.4. E. Aranda-Bricaire, C.H. Moog, J.-B. Pomet, Feedback Linearization: A LinearAlgebraic Approach, Memorias de la 32 IEEE Conference on Decision and Control, Vol.4, pp. 3441-3446, San Antonio, U.S.A., Diciembre 1993.
2.1.c.5. E. Aranda-Bricaire, U. Kotta, C.H. Moog, A linear algebraic framework forfeedback linearization of discrete-time nonlinear systems, Memorias del IFAC Workshopon New Trends in Design of Control Systems, pp. 35-40, Smolenice, Slovakia,Septiembre 1994.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 5 -
2.1.c.6. E. Aranda-Bricaire, U. Kotta, C.H. Moog, Accessibility and feedbacklinearization of discrete-time systems, Memorias de la 33 IEEE Conference on Decisionand Control, Vol. 2, pp. 1627-1632, Lake Buena Vista, U.S.A., Diciembre 1994.
2.1.c.7. E. Aranda-Bricaire, J.-B. Pomet, Some Explicit Conditions for a Control Systemto be Feedback Equivalent to Extended Goursat Form, Memorias del 3er. IFACNOLCOS Symposium, Vol 2., pp. 535-540, Lake Tahoe, U.S.A., Junio 1995.
2.1.c.8. E. Aranda-Bricaire, U. Kotta, Dynamic disturbance decoupling for discrete-timenonlinear systems: a linear algebraic solution, Memorias de la IFAC Conference onSystems Structure and Control, pp. 155-160, Nantes, France, Julio 1995.
2.1.c.9. E. Aranda-Bricaire, Computer algebra analysis of discrete-time nonlinearsystems, Memorias del 13 IFAC World Congress, Vol. F, pp. 305-309, San Francisco,U.S.A., Julio 1996.
2.1.c.10. E. Aranda-Bricaire, U. Kotta, Dynamic disturbance decoupling for discrete-time nonlinear systems: a solution in terms of generalized controlled invariance,Memorias de la 35 IEEE Conference on Decision and Control, pp. 4317-4318, Kobe,Japón, Diciembre 1996.
2.1.c.11. E. Aranda-Bricaire, U. Kotta, Equivalence of discrete-time nonlinear systemsto prime systems under proper generalized output transformations, Memorias del 1997European Control Conference, Bruselas, Bélgica, Julio 1997.2.1.c.12. E. Aranda-Bricaire, U. Kotta, The discrete-time nonlinear dynamic disturbancedecoupling problem with partially measurable disturbances, Memorias de la InternationalConference of Oscillations and Chaos, St. Petersburg, Russia, Agosto 1997.
2.1.c.13. S. Celikovsky, E. Aranda-Bricaire, Constructive nonsmooth stabilzation of aclass of nonlinear single-input systems, Memorias de la 36th. IEEE Conference onDecision and Control, San Diego, U.S.A., Diciembre 1997.
2.1.c.14. R.M. Hirschorn, E. Aranda-Bricaire, Asymptotic output tracking for nonlinearsystems, Memorias de la 36th. IEEE Conference on Decision and Control, San Diego,U.S.A., Diciembre 1997.
2.1.c.15. E. Aranda-Bricaire, S. Celikovsky, Design of continuous stabilizing controllaws for nonlinear triangular systems, Memorias de la IFAC Conference on SystemStructure and Control, Nantes, France, July 8-10, 1998, pp. 77-82.
2.1.c.16. E. Aranda-Bricaire, R.M. Hirschorn, Practical stabilization of a class of single-input nonlinear systems, Memorias de la IFAC Conference on System Structure andControl, Nantes, France, July 8-10, 1998, pp. 89-94.
2.1.c.17. E. Aranda-Bricaire, R.M. Hirschorn, Equivalence of nonlinear systems toprime systems under generalized output transformations, Memorias de la 37 IEEEConference on Decision and Control, Tampa, Florida, December 16-18, 1998.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 6 -
2.1.c.18. R.M. Hirschorn, E. Aranda-Bricaire, Practical stabilization of locallylinearizable systems, Memorias de la 38 IEEE Conference on Decision and Control,Phoenix, Arizona, December 7-10, 1999, pp. 1623-1628.
2.1.c.19. E. Aranda-Bricaire, S. Celikovsky, H.D. Navarro-Yah, Computer algebradesign of continuous stabilizers for singular triangular systems, Memorias de la 38 IEEEConference on Decision and Control, Phoenix, Arizona, December 7-10, 1999, pp.1629-1634.
2.1.c.20. L.A. Marquez, C.H. Moog, E. Aranda-Bricaire, Triangular forms for nonlineartime-delay systems, Proc. 3rd. IFAC Workshop on time-delay systems, December 2001,Santa Fe, New Mexico, USA, pp. 261-265.
2.1.c.21. E. Aranda-Bricaire, C.P. González-Inda, F. Plestan, M. Velasco-Villa,Nonlinear observers applied to the control of an overhead crane, Proceedings of the15th IFAC World Congress, Barcelona, España, Julio 2002.
2.1.c.22. R. Orosco-Guerrero, E. Aranda-Bricaire, M. Velasco-Villa, Modeling anddynamic feedback linearization of a multi-steered n-trailer, Proceedings of the 15th IFACWorld Congress, Barcelona, España, Julio 2002.
2.1.c.23. E. Aranda-Bricaire, C.H. Moog, Characterization of invariant codistributionsfor discrete-time nonlinear dynamical systems, Proceedings of the 15th IFAC WorldCongress, Barcelona, España, Julio 2002.
2.1.c.24. R. Orosco-Guerrero, E. Aranda-Bricaire, M. Velasco-Villa, Global path-tracking for a multi-steered general n-trailer, Proceedings of the 15th IFAC WorldCongress, Barcelona, España, Julio 2002.
2.1.c.25. T. Vidal-Calleja, M. Velasco-Villa, E. Aranda-Bricaire, Real-Time ObstacleAvoidance for Trailer-Like Systems, Proceedings of the International Symposium onRobotics and Automations ISRA’2002, Toluca, México, Septiembre 2002, pp. 131-136.
2.1.c.26. T. Vidal-Calleja, M. Velasco-Villa, E. Aranda-Bricaire, Artificial potencial fieldsfor trailer-like systems, Memorias del X Congreso Latinoamericano de ControlAutomático, Guadalajara, México, Diciembre 2002.
2.1.c.27. M. Velasco-Villa, E. Aranda-Bricaire, C.P. González-Inda, Kinematic modelbased real time control of an overhead crane, Actas del X Congreso Latinoamericano deControl Automático, Guadalajara, México, Diciembre 2002.
2.1.c.28. E. Aranda-Bricaire, C.H. Moog, Equivalence of discrete-time nonlinearsystems to feedforward form, Proceeedings of the European Control Conference,Cambridge, United Kingdom, Septiembre 2003.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 7 -
2.1.c.29. R. Orosco-Guerrero, M. Velasco-Villa, E. Aranda-Bricaire, Discrete-timecontroller for a wheeled mobile robot, Memorias del XI Congreso Latinoamericano deControl Automático (CLCA 2004), La Habana, Cuba, 10 al 15 de mayo de 2004.
2.1.c.30. F. Jaimes-Santín, A. Sánchez, E. Aranda-Bricaire, Synthesis of SupervisoryControllers considering Product Production Rules in Automated Manufacturing Systems,Proceedings of the International Symposium on Robotics and Automation (ISRA 2004),Querétaro, México, 25 al 27 de agosto de 2004.
2.1.c.31. E. Aranda-Bricaire, J. Alvarez-Ramirez, Multi-loop feedback control of oil welldrillstrings, Proceedings of the 16th IFAC World Congress, Prague, Czech Republic,July 2005.
2.1.c.32. E.G. Hernandez-Martínez, E. Aranda-Bricaire, J. A. Nava, A. Sánchez, Adesign strategy of discrete event controllers for automated manufacturing systems,Proceedings of the 2nd International Conference on Electrical and ElectronicsEngineering (ICEEE) and XI Conference on Electrical Engineering (CIE 2005), México,September 7-9, 2005.
2.1.c.33. E. Aranda-Bricaire, C.H. Moog, Exogenous feedback linearization of discrete-time systems, Proceedings of the 44th IEEE Conference on Decision and Control and2005 European Control Conference (CDC-ECC 05), Seville, Spain, December 2005, pp.4921-4926.
2.1.c.34. A. Sanchez, E. Aranda-Bricaire, E. Hernández, Design of coordinationcontrollers for a class of discrete-event manufacturing systems, Proceedings of the 12thIFAC Symposium on Information Control Problems in Manufacturing, St Etienne,France, May 17-19, 2006.
2.1.c.35. P. Niño-Suárez, M. Velasco-Villa, E. Aranda-Bricaire, Discrete-Timestabilization problem of a mobile robot subject to network induced delay, Proceedings ofthe 5th International Symposium on Robotics and Automation, San Miguel Regla,México, August 25-28, 2006.
2.1.c.36. E. Aranda-Bricaire, C. H. Moog, Embedded dynamics of continuous timenonlinear single input systems, Proceedings of the 45th IEEE Conference on Decisiónand Control, San Diego, USA, December 13-15, 2006, pp. 973-976.
2.1.c.37. V. Rejón, E. Aranda-Bricaire, Discrete-time stabilization of a PVTOL withoutroll angle and velocities measurement, Proceedings of the 45th IEEE Conference onDecisión and Control, San Diego, USA, December 13-15, 2006, pp. 1521-1526.
2.1.c.38. P. A. Niño-suárez, E. Aranda-Bricaire, M. Velasco-Villa, Discrete-time slidingmode path-tracking control for a wheeled mobile robot, Proceedings of the 45th IEEEConference on Decisión and Control, San Diego, USA, December 13-15, 2006, pp.3052-3057.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 8 -
2.1.c.39. H. Rodríguez-Cortés, E. Aranda-Bricaire, Observer based trajectory trackingfor a wheeled mobile robot, Proceedings of the 2007 American Control Conference,New York, USA, July 11-13, 2007, pp. 991-996.
2.1.c.40. V. Rejón, E. Aranda-Bricaire, Discrete-time stabilization of a remotelycontrolled flying robot in real-time without velocities measurement, Proceedings of the33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan,November 5-8, 2007, pp.756-761.
2.1.c.41. E. G. Hernández-Martínez, E. Aranda-Bricaire, Decentralized formation andmarching control for unicycles based on artificial potential fields, Proceedings of the 4thLatin American IEEE Robotic Symposium and IX Mexican Robotic Congress, Monterrey,México, November 7-9, 2007.
2.1.c.42. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Non-Collision Conditions inMulti-agent Robots Formation using Local Potential Functions, Proceedings of the IEEEInternational Conference on Robotics and Automation (ICRA 2008), pp. 3776-3781,Mayo 19-23, 2008, Pasadena, California, E.U.
2.1.c.43. V. Rejón, E. Aranda-Bricaire, Discrete-time dynamic feedback linearization ofa VTOL using observed states, Proceedings of the 17 th IFAC World Congress, pp. 1753-1759, Julio 6-11, 2008, Seoul, Korea.
2.1.c.44. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Non-Collision Conditions inFormation Control using a Virtual Leader Strategy, Memorias del XIII CongresoLatinoamericano de Control Automático / VI Congreso Venezolano de Automatización yControl (CLCA/CAC 2008), Mérida, Venezuela, 25 al 28 de Noviembre de 2008.
2.1.c.45. O. A. Cervantes-Gloria, M. Velasco-Villa, E. Aranda-Bricaire, H. Rodríguez-Cortés, Real-Time Localization and Trajectory Tracking for a Wheeled Mobile RobotBased on Velocity and Orientation Observation Scheme, Memorias del XIII CongresoLatinoamericano de Control Automático / VI Congreso Venezolano de Automatización yControl (CLCA/CAC 2008), Mérida, Venezuela, 25 al 28 de Noviembre de 2008.
2.1.c.46. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Experimental Comparison ofNon-collision Strategies in Multi-Agent Robots Formation Control, IEEE MidwestSymposium on Circuits and Systems (MWSCAS), 2 al 5 de agosto de 2009, Cancun,Mexico, pp. 321-324.
2.1.c.47. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Multi-Agent Formation controlwith Collision Avoidance based on Discontinuous Vector Fields, 35th AnnualConference of the IEEE Industrial Electronics Society (IECON), 3 al 5 de Noviembre de2009, Porto, Portugal, pp. 2303-2308.
2.1.c.48. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Marching Control of Unicyclesbased on the Leader-Followers Scheme, 35th Annual Conference of the IEEE Industrial
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 9 -
Electronics Society (IECON), 3 al 5 de Noviembre de 2009, Porto, Portugal, pp. 2285-2290.
2.1.c.49. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Decentralized FormationControl of Multi-agent Robots Systems Based on Formation Graphs, Memorias del XIVCongreso Latinoamericano de Automática (CLCA) y el XIX Congreso de la AsociaciónChilena de Control Automático (ACCA), llevado a cabo del 24 al 27 de agosto de 2010en Santiago de Chile, Chile. Sin paginación.
2.1.c.50. E. G. Hernandez-Martinez, E. Aranda-Bricaire, A. Sánchez, Hands-onExercises of Supervisory Control for Discrete-event Manufacturing Systems, Memoriasdel XIV Congreso Latinoamericano de Automática (CLCA) y el XIX Congreso de laAsociación Chilena de Control Automático (ACCA), llevadoa a cabo del 24 al 27 deagosto de 2010 en Santiago de Chile, Chile. Sin paginación.
2.1.c.51. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Trajectory Tracking for Groupsof Unicycles with Convergence of the Orientation Angles, Proc. of the 49th IEEEConference on Decision and Control (CDC), llevado a cabo del 15 al 17 de diciembre de2010 en Atlanta, Georgia, USA, pp. 6323-6328.
2.1.c.52. J. González-Sierra, E. Aranda-Bricaire, E. G. Hernández-Martínez, TrajectoryTracking Strategies with Singularities Avoidance for Groups of Unicycle-type Robots,Proc. 18th IFAC World Congress, Milan, Italy, August 28 to September 2, 2011, pp.5926-5931.
2.1.c.53. G. R. Peñaloza-Mendoza, D. E. Hernández-Mendoza, E. Aranda-Bricaire,Time-Varying Formation Control for Multi-Agent Systems Applied to n-TrailerConfiguration, Proc. 8th International Conference on Electrical Engineering, ComputingScience and Automatic Control, Mérida, Yucatan, México, October 2011, pp. 379-384.
2.1.c.54. D. E. Hernández-Mendoza, G. R. Peñaloza-Mendoza, E. Aranda-Bricaire,Discrete-Time Formation and Marching Control for Multi-Agent Robot Systems, Proc.8th International Conference on Electrical Engineering, Computing Science andAutomatic Control. Mérida, Yucatan, México, October 2011, pp. 462-467.
2.1.c.55. J. González-Sierra, E. Aranda-Bricaire, H. Rodríguez-Cortés, AttitudeObserver and Trajectory Tracking for a Group of Unicycle-Type Robots, Proceedings ofthe 9th International Conference on Electrical Engineering, Computing Science andAutomatic Control (CCE 2012), Ciudad de México, Septiembre 26-28, 2012, pp. 159-164. ISBN: 978-1-4673-2168-6.
2.1.c.56. E. Aranda-Bricaire, D.E. Hernández-Mendoza, G. R. Peñaloza-Mendoza,Experimental Comparison Between Continuous- and Discrete-Time controllers for Multi-Agent Robot Systems, Proceedings of the 9th International Conference on ElectricalEngineering, Computing Science and Automatic Control (CCE 2012), Ciudad de México,México, Septiembre 26-28, 2012, . pp. 110-115. ISBN: 978-1-4673-2168-6.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 10 -
2.1.c.57. F. Rendón-Benitez, J. Santiaguillo-Salinas, J. González-Sierra, E. Aranda-Bricaire, Control de Marcha de Sistemas Multi-agente con Orientación al Ángulo deMarcha del Líder, Memorias del XV Congreso Latinoamericano de Control Automático(CLCA 2012), Lima, Perú, Octubre 23-26, 2012. ISBN: 978-612-4057-71-7.
2.1.c.58. J. Santiaguillo-Salinas, F. Rendón-Benitez, E. Aranda-Bricaire, Control deFormación con No Colisión de Sistemas Multi-agente con Conmutación de Gráficas deFormación, Memorias del XV Congreso Latinoamericano de Control Automático (CLCA2012), Lima, Perú, Octubre 23-26, 2012. ISBN: 978-612-4057-71-7.
2.1.c.59. J. González-Sierra, E. Aranda-Bricaire, H. Rodriguez-Cortes, J. Santiaguillo-Salinas, Trajectory Tracking for a Group of Unicycle-type Robots using an AttitudeObserver, Proceedings of the 9th IFAC Symposium on Nonlinear Control Systems(NOLCOS 2013), Toulouse, France, 4-6 September 2013.
2.1.c.60. E. G. Hernández-Martínez, E. Aranda-Bricaire, Collision Avoidance inFormation Control using Discontinuous Vector Fields, Proceedings of the 9th IFACSymposium on Nonlinear Control Systems (NOLCOS 2013), Toulouse, France, 4-6September 2013.
2.1.c.61. J. González-Sierra, E. Aranda-Bricaire, H. Rodríguez-Cortés, J. Santiaguillo-Salinas Trajectory Tracking for a Group of Unicycle-type Robots using an AttitudeObserver. Proceedings of the 9th IFAC Symposium on Nonlinear Control Systems,2013, Volume 9, Part 1, pp. 676-681, Toulouse, France, September, 4-6, 2013. DOI10.3182/20130904-3-FR-2041.00164.
2.1.c.62. E.G. Hernández-Martínez, E. Aranda-Bricaire, Collision Avoidance inFormation Control Using Discontinuous Vector Fields. Proceedings of the 9th IFACSymposium on Nonlinear Control Systems, 2013, Volume 9, Part 1, pp. 797-802,Toulouse, France, September, 4-6, 2013. DOI 10.3182/20130904-3-FR-2041.00117.
2.1.c.63. J. Santiaguillo-Salinas, E. Aranda-Bricaire. Time-varying containmentproblem for multi-agent systems. Proceedings of the 10th International Conference onElectrical Engineering, Computing Science and Automatic Control (CCE), Mexico City,Mexico, September 30-October 4, 2013, DOI 10.1109/ICEEE.2013.6676093
2.1.c.64. J. González-Sierra, E. Aranda-Bricaire, Design of a Virtual Mechanism forTrajectory Tracking of Convoys of Mobile Robots, Proceedings of the 10th InternationalConference on Electrical Engineering, Computing Science and Automatic Control(CCE), pp. 364-368, Mexico City, Mexico. September 30-October 4, 2013, DOI10.1109/ICEEE.2013.6676008
2.1.c.60 M. A. Rosaldo Serrano, E. Aranda Bricaire, Modelado y control de unprototipo comercial de aeronave tipo quadrirotor, Memorias del XVI CongresoLatinoamericano de Control Automático CLCA 2014, Octubre 14-17, 2014, Cancún,Quintana Roo, México, pp. 72-77.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 11 -
2.1.c.66. J. Santiaguillo-Salinas, E. Aranda-Bricaire, Seguimiento de Trayectorias paraun Helicóptero de 4 Rotores AR.Drone 2.0 Utilizando ROS, Memorias del XVI CongresoLatinoamericano de Control Automático CLCA 2014, Octubre 14-17, 2014, Cancún,Quintana Roo, México, pp. 606-611.
2.1.c.67. J. Santiaguillo-Salinas, E. Aranda-Bricaire, Leader-oriented Formation FlightControl for Multi-agent Systems, Memorias del XVI Congreso Latinoamericano deControl Automático CLCA 2014, Octubre 14-17, 2014, Cancún, Quintana Roo, México,pp. 935-940.
2.1.c.68. J. F. Flores-Resendiz, E. Aranda-Bricaire, Cyclic pursuit formation controlwithout collisions in multiagent systems using discontinuous vector fields, Memorias delXVI Congreso Latinoamericano de Control Automático CLCA 2014, Octubre 14-17,2014, Cancún, Quintana Roo, México, pp. 941-946.
2.1.c.69. M. A. Rosaldo Serrano, E. Aranda Bricaire, Coordinación de movimiento parasistemas multiagente heterogéneos, Memorias del XVI Congreso Latinoamericano deControl Automático CLCA 2014, Octubre 14-17, 2014, Cancún, Quintana Roo, México,pp. 947-952.
2.1.c.70. Jaime González-Sierra, Eduardo Aranda-Bricaire, Reduction of Off-trackingEffects in an n-trailer Emulated through a Multi-agent Robot Mobile System,International Conference on Robotics and Automation ICRA 2015, pp. 5935-5940,Seattle, Washington, USA, 2015.
2.1.d. Publicados en extenso en memorias de congresos locales, con arbitraje.
2.1.d.1. R.J. Uc-Caamal, E. Aranda-Bricaire, Control de un manipulador flexible enpresencia de incertidumbres paramétricas, Memorias de la Tercera Conferencia deIngeniería Eléctrica CIE-97, CINVESTAV-IPN, México, Septiembre 1997.
2.1.d.2. T. Salgado-Jiménez, E. Aranda-Bricaire, M. Velasco-Villa, Diseño,construcción y control de un robot móvil, Memorias de la Quinta Conferencia deIngeniería Eléctrica CIE99, CINVESTAV-IPN, México, Septiembre 1999.
2.1.d.3. F. Rosas-Rivera, J.M. Rico-Martínez, E. Aranda-Bricaire, Determinación detrayectorias factibles para manipuladores seriales que pasan a través de posicionessingulares, Memorias de la Quinta Conferencia de Ingeniería Eléctrica CIE99,CINVESTAV-IPN, México, Septiembre 1999.
2.1.d.4. R. Orosco-Guerrero, E. Aranda-Bricaire, M. Velasco-Villa, Modeling andfeedback linearization of a multi-steered general n-trailer, Memorias del tercer CongresoMexicano de Robótica, pp. 57-61, Querétaro, Querétaro, México, Septiembre 2001.
2.1.d.5. E. Aranda-Bricaire, T. Salgado-Jiménez, M. Velasco-Villa, Control no linealdiscontinuo de un robot móvil, Memorias del Congreso Nacional de la Asociación deMéxico de Control Automático, sesión ST6-16:30, San Luis Potosí, México, mayo 2001.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 12 -
2.1.d.6. C.P. González-Inda, E. Aranda-Bricaire, M. Velasco-Villa, Output tracking foran overhead crane without load position measurement, Memorias del CongresoNacional de la Asociación de México de Control Automático, sesión ST5-17:20, SanLuis Potosí, México, mayo 2001.
2.1.d.7. R. Orosco-Guerrero, E. Aranda-Bricaire, M. Velasco-Villa, Modelado y controlde trailers generalizados multiactuados, Memorias de la Séptima Conferencia deIngeniería Eléctrica, pp. 250-256, México DF, Septiembre 2001.
2.1.d.8. C.P. González-Inda, E. Aranda-Bricaire, M. Velasco-Villa, Observer-basedcontrol of and overhead crane, Memorias de la Séptima Conferencia de IngenieríaEléctrica, pp. 243-249, México DF, Septiembre 2001.
2.1.d.9. M. Albarrán-Jiménez, M. Velasco-Villa, E. Aranda-Bricaire, R. OroscoGuerrero, Seguimiento global de trayectorias para el 1-trailer general multiactuado:Resultados Experimentales, Memorias del Cuarto Congreso Mexicano de Robótica,México, DF, Octubre 2002, pp. 1-7.
2.1.d.10. R. Orosco-Guerrero, M. Velasco-Villa, E. Aranda-Bricaire, Discrete-timemodeling and control of a wheeled mobile robot, Memorias del 5to. Congreso Mexicanode Robótica, San Luis Potosí, Agosto 2003, pp. 171-176.
2.1.d.11. R. Orosco-Guerrero, M. Velasco-Villa, E. Aranda-Bricaire, Stable discrete-time path-tracking for a WMR, Memorias del Congreso Nacional de Control Automático,Ensenada, Octubre 2003, pp. 131-136.
2.1.d.12. R. Orosco-Guerrero, M. Velasco-Villa, E. Aranda-Bricaire, Real-timeimplementation of a discrete-time controller for a WMR, Memorias del CongresoNacional de Control Automático, Ensenada, Octubre 2003, pp. 193-198..
2.1.d.13. C. J. Gaspar-Valle, M. Velasco-Villa, E. Aranda-Bricaire, LocalizaciónAbsoluta de Objetos Mediante Ultrasonido, VI Congreso Mexicano de Robótica(COMRob 2004), 7 al 8 de Octubre de 2004, Torreón, México
2.1.d.14. P. A. Niño-Suárez, M. Velasco-Villa, E. Aranda-Bricaire, Discretizaciónexacta de un robot móvil con retardo de transporte, Congreso Anual de la Asociación deMéxico de Control Automático 2004, 20 al 22 de octubre de 2004, México, DF, pp. 407-412.
2.1.d.15. C. J. Gaspar-Valle, E. Aranda-Bricaire, M. Velasco-Villa, Localizaciónabsoluta de objetos mediante minimización de errores de mediciones ultrasónicas,Congreso Anual de la Asociación de México de Control Automático 2004, 20 al 22 deoctubre de 2004, México, DF, pp. 401-406.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 13 -
2.1.d.16. V. Rejón, E. Aranda-Bricaire, Observer based stabilization of a planar verticaltake off and landing aircraft, Memorias del Congreso Nacional de Control Automático,Cuernavaca, México, 19 al 21 de octubre 2005.
2.1.d.17. P.A. Niño-Suarez, M. Velasco-Villa, E. Aranda-Bricaire, Discrete-TimeFeedback Linearization of a Wheeled Mobile Robot Subject to Transport Delay,Memorias del Congreso Nacional de Control Automático, Cuernavaca, México, 19 al 21de octubre 2005.
2.1.d.18. P.A. Niño-Suárez, E. Aranda-Bricaire, M. Velasco-Villa, Control por modosdeslizantes en tiempo discreto para el seguimiento de trayectorias de un robot móvil, VIIMemorias del VII Congreso Mexicano de Robótica COMRob 2005, México. DF, 27-28octubre 2005.
2.1.d.19. J.C. López Aguado, J. Gallardo Alvarado, J.M. Rico Martínez, E. Aranda-Bricaire, Determinación del subespacio de direcciones singulares, de un manipuladorserial no redundante, en una posición singular en base a la forma de Klein y suspropiedades, Memorias del VII Congreso Mexicano de Robótica COMRob 2005, 27 al28 de octubre de 2005, México, DF.
2.1.d.20. J.C. López Aguado, J. Gallardo Alvarado, J.M. Rico Martínez, E. Aranda-Bricaire, Condiciones de factibilidad en manipuladores seriales no redundantes através de posiciones singulares, Memorias del VII Congreso mexicano de RobóticaCOMRob 2005, 27 al 28 de octubre de 2005, México, DF.
2.1.d.21. H. Rodríguez-Cortés, E. Aranda-Bricaire, Dynamic partial state feedbacktrajectory tracking of the unicycle mobile robot, Memorias del Congreso Nacional deControl Automático, México, DF, 18-20 Octubre 2006, pp. 112-117.
2.1.d.22. J. P. Sánchez-Santana, M. Velasco-Villa, E. Aranda-Bricaire, Control entiempo real de un robot móvil mediante localización absoluta, Memorias del CongresoNacional de Control Automático, México, DF, 18-20 Octubre 2006, pp. 481-486.
2.1.d.23. E.G. Hernández-Martínez, E. Aranda-Bricaire, Estrategias de controldescentralizado para la formación de sistemas de robots multiagentes basadas encampos potenciales artificiales, Memorias del 8o. Congreso Mexicano de RobóticaCOMRob 2006, México, DF, 19-20 octubre 2006, pp. 1-8.
2.1.d.24. E.G. Hernández-Martínez, E. Aranda-Bricaire, Control de formación desistemas de robots multiagentes evitando colisiones, mediante campos potencialesartificiales, memorias del 8o. Congreso Mexicano de Robótica COMRob 2006, México,DF, 19-20 octubre 2006, pp. 9-16.
2.1.d.25. P. A. Niño-suárez, E. Aranda-Bricaire, M. Velasco-Villa, Problema deregulación en tiempo discreto de robots móviles tipo (2,0), Memorias del 8o. CongresoMexicano de Robótica COMRob 2006, México, DF, 19-20 octubre 2006, pp. 28-34.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 14 -
2.1.d.26. V. Rejón, E. Aranda-Bricaire, Estabilización en tiempo-real de una aeronavede despegue vertical de cuatro rotores, Memorias del Congreso Nacional de ControlAutomático, Monterrey, México, 24 al 26 de octubre de 2007.
2.1.d.27. E. G. Hernández-Martínez, E. Aranda-Bricaire, Decentralized formation andmarching control for multi-agent robots base don the leader-followers scheme,Memorias del Congreso Nacional de Control Automático, Monterrey, México, 24 al 26de octubre de 2007.
2.1.d.28. O. A. Cervantes-Gloria, M. Velasco-Villa, E. Aranda-Bricaire, H. Rodríguez-Cortés. Estimación experimental de la postura de un robot móvil autónomo, Memoriasdel Congreso Nacional de Control Automático, Monterrey, México, 24 al 26 de octubrede 2007.
2.1.d.29. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Non-collision Strategy forMultiagent Robots Formation based on Artificial Vector Fields, X Congreso Mexicano deRobótica (COMRob 2008), Septiembre 25-26, 2008, México, D. F., México.
2.1.d.30. A. Sanchez, E. Aranda-Bricaire, E. G. Hernandez-Martinez, J. Magallon, J.Molina, AGV Navigation in Flexible Manufacturing Systems using Formation Control,Congreso Nacional de la Asociación de México de Control Automático (AMCA), 30 deseptiembre al 2 de octubre de 2009, Zacatecas, México, pp. 2285-2290.
2.1.d.31. J. González-Sierra, E. Aranda Bricaire, Estrategias de control de marcha conconvergencia de los ángulos de orientación para sistemas multiagente, Memorias delXII Congreso Mexicano de Robótica, 3 al 6 de noviembre de 2010, Mazatlán, Sinaloa,México. Sin paginación.
2.1.d.32. J. González-Sierra, E. Aranda Bricaire, Aplicación de un sistema de visiónpor computadora de bajo costo para realizar control de marcha en sistemasmultiagente, Memorias del XII Congreso Mexicano de Robótica, 3 al 6 de noviembre de2010, Mazatlán, Sinaloa, México. Sin paginación.
2.1.d.33. J. González-Sierra, E. Aranda-Bricaire, Avance en formación variante en eltiempo para sistemas multiagente, Memorias del XIV Congreso Mexicano de Robótica(COMRob 2012), Puebla, México, Octubre 24-26, 2012.
2.1.d.34. D.E. Hernández-Mendoza, E. Aranda-Bricaire, Discrete-Time FormationControl of Multi-Agent Robot Systems, Memorias del XIV Congreso Mexicano deRobótica, (COMRob 2012), Puebla, México, Octubre 24-26, 2012.
2.1.d.34 J. González-Sierra, J. Santiaguillo-Salinas, E. Aranda-Bricaire. Emulación deEstructuras Mecánicas mediante Sistemas Multi-Agente. Memorias del CongresoNacional de Control Automático AMCA 2013, pp. 348-353, Ensenada, Baja California,México, Octubre 16-18, 2013.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 15 -
2.1.d.36. J. C. Pérez-Sampieri, E. Aranda-Bricaire, E. G. Hernández-Martínez,Supervisory Control of AGV’s for Flexible Manufacturing Cells, Memorias del CongresoNacional de Control Automático AMCA 2013, pp. 366-371, Ensenada, Baja California,México, Octubre 16-18, 2013.
2.1.d.37. J. Santiaguillo-Salinas, E. Aranda-Bricaire. Control de marcha yconfinamiento para sistemas multi-agente. Memorias del Congreso Nacional de ControlAutomático AMCA 2013, pp. 747-752, Ensenada, Baja California, México, Octubre 16-18, 2013.
2.1.d.38. J. González-Sierra, J. Santiaguillo-Salinas, E. Aranda-Bricaire. Reducción delos Efectos de Sobreviraje para un Tráiler Virtual. Memorias del XV Congreso Mexicanode Robótica COMROB 2013, Manzanillo, Colima, México, Octubre 1-4, 2013.
2.1.d.39. J. Santiaguillo-Salinas, E. Aranda-Bricaire. Time-varying containment controlfor multi-agent robot systems with general formation graphs. Memorias del XV CongresoMexicano de Robótica COMRob 2013, pp. 269-274, Manzanillo, Colima, México,Octubre 1-4, 2013.
2.1.d.40. M. Méndez-Martínez, J. González-Sierra, E. Aranda-Bricaire. Control devuelo en configuración líder-seguidor para Aeronaves tipo cuadrirotor. Memorias del XVICongreso Mexicano de Robótica, pp.179-184, Mazatlán, México, 2014.
2.1.d.41. G. R. Peñaloza-Mendoza, D.E. Hernández-Mendoza, E. Aranda-Bricaire,Discrete-time time-varying formation control for multi-agent systems applied to n-trailerconfiguration, Memorias del XVI Congreso Mexicano de Robótica, pp. 145-150,Mazatlán, México, 2014.
2.1.d.42. J. González-Sierra, J. Santiaguillo-Salinas, E. Aranda Bricaire, IndividualObstacle Avoidance for Groups of Mobile Robots in Formation Tracking, Memorias delXVII Congreso Mexicano de Robótica, Los Cabos, Baja California Sur, México,Noviembre 11-13, 2015.
2.1.d.43. J. Santiaguillo-Salinas, J. González-Sierra, E. Aranda-Bricaire, Evasión deobstáculos en el control de marcha para sistemas multi-agente, Memorias del XVIICongreso Mexicano de Robótica, Los Cabos, Baja California Sur, México, Noviembre11-13, 2015.
2.1.d.44. A. J. Hernández Mejía, E. Aranda Bricaire, Control de Posición de un ObjetoPendiente de un Cuadrirotor, Memorias del XVII Congreso Mexicano de Robótica, LosCabos, Baja California Sur, México, Noviembre 11-13, 2015.
2.1.d.45. L. Salinas-Te, E. Aranda-Bricaire, Modelado y Control de un CuadrirrotorComercial Empleando un Observador de Estados, Memorias del XVII CongresoMexicano de Robótica, Los Cabos, Baja California Sur, México, Noviembre 11-13, 2015.
2.1.f. Publicados, de difusión restringida, con arbitraje estricto.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 16 -
2.1.f.1. G. Silva-Navarro, J. Alvarez-Gallegos, E.Aranda-Bricaire, Control por ModosDeslizantes para una Clase de Sistemas Lineales Singularmente Perturbados,CINVESTAV-IPN, Serie amarilla, No. 124, Abril 1992.
2.1.f.2. E. Aranda-Bricaire, C.H. Moog, J.-B. Pomet, Infinitesimal Brunovsky form fornonlinear systems with applications to dynamic linearization, Reporte de InvestigaciónNo. 2313, INRIA, Francia, Julio 1994.
2.1.f.3. S. Celikovsky, E. Aranda-Bricaire, Constructive nonsmooth stabilization oftriangular systems, Research Report No. 1907, Institute of Information Theory andAutomation, Academy of Sciences of the Czech Republic, Agosto 1997.
2.3. Capítulos de investigación original en extenso en libros especializados.
2.3.1. J. Alvarez, E. Aranda, Nonlinear Adaptive Control for a Chemical Reactor usingSingular Perturbation Techniques, in Dynamics and control of Chemical reactors,Distillations columns and batch processes, Pergamon Press, Oxford, 1993, ISBN 0-08-041711-6, pp. 125-130.
2.3.2. E. Aranda-Bricaire, C.H. Moog, J.-B. Pomet, Infinitesimal Brunovsky form fornonlinear systems with applications to dynamic linearization, in Geometry in NonlinearControl and Differential Inclusions, B. Jakubczyk, W. Respondek, Eds., Banach CenterPublications, Vol. 32, Institute of Mathematics, Polish Academy of Sciences, Warszawa,1995, ISSN 0137-6934, pp. 19-33.
2.3.3. E.G. Hernández-Martínez, E. Aranda-Bricaire, Convergence and collisionavoidance in formation control: A survey of the artificial potential functions approach, inMulti-Agent Systems - Modeling, Control, Programming, Simulations and Applications,F. Alkhateeb, E. A. Maghayreh, I. A. Doush, Eds., Intech Open Access Publisher,Croatia, March 2011, ISBN 978-953-307-174-9, pp. 103-126.
2.3.4. J. González-Sierra and E. Aranda-Bricaire, Emulation of mechanical structuresthrough a multi-agent robot system: An overview. In M. Ceccarelli, E. E. Hernández-Martinez, editors, Multibody Mechatronic Systems, Mechanisms and Machine Science,Vol. 25, pp. 327–337. Springer International Publishing, 2015. ISBN 978-3-319-09857-9.doi: 10.1007/978-3-319-09858-6_31 URL: http://dx.doi.org/10.1007/978-3-319-09858-6_31
3. FORMACION DE RECURSOS HUMANOS
3.1. Cursos teóricos y/o prácticos.
3.1.a. Programas del CINVESTAV
3.1.a.1. Matemáticas I , Sección de Control Automático, Departamento de IngenieríaEléctrica, septiembre-diciembre 1994, 56 horas.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 17 -
3.1.a.2. Matemáticas I, Sección de Control Automático, Departamento de IngenieríaEléctrica, septiembre-diciembre 1996, 72 horas.
3.1.a.3. Matemáticas I, Sección de Control Automático, Departamento de IngenieríaEléctrica, septiembre-diciembre 1997, 72 horas.
3.1.a.4. Estabilización de sistemas no lineales, Sección de Control Automático,Departamento de Ingeniería Eléctrica, septiembre-diciembre 1998, 56 horas.
3.1.a.5. Matemáticas, Programa Departamental de Mecatrónica, Departamento deIngeniería Eléctrica, septiembre-diciembre 1998, 16 horas.
3.1.a.6. Matemáticas, Sección de Mecatrónica, Departamento de Ingeniería Eléctrica,septiembre-diciembre 1999, 36 horas.
3.1.a.7. Matemáticas, Sección de Mecatrónica, Departamento de Ingeniería Eléctrica,septiembre-diciembre 2000, 36 horas.
3.1.a.8. Sistemas Mecatrónicos, Sección de Mecatrónica, Departamento de IngenieríaEléctrica, mayo-agosto 2000, 24 horas.
3.1.a.9. Sistemas Mecatrónicos, Sección de Mecatrónica, Departamento de IngenieríaEléctrica, enero-abril 2001, 24 horas.
3.1.a.10. Sistemas Mecatrónicos, Sección de Mecatrónica, Departamento deIngeniería Eléctrica, mayo-agosto 2003, 24 horas.
3.1.a.11. Sistemas Mecatrónicos, Sección de Mecatrónica, Departamento deIngeniería Eléctrica, enero-abril 2004, 56 horas.
3.1.a.12. Control de Sistemas No Lineales, Sección de Mecatrónica, Departamentode Ingeniería Eléctrica, septiembre-diciembre 2004, 56 horas.
3.1.a.13. Sistemas Mecatrónicos, Sección de Mecatrónica, Departamento deIngeniería Eléctrica, enero-abril 2005, 56 horas.
3.1.a.14. Sistemas Mecatrónicos, Departamento de Ingeniería Eléctrica, Cuatrimestre1-2006, 56 horas.
3.1.a.15. Estabilización de Sistemas No Lineales, Departamento de IngenieríaEléctrica, Cuatrimestre 2006-2, 56 horas.
3.1.a.16. Matemáticas, Departamento de Ingeniería Eléctrica, Cuatrimestre 2007-3, 16horas.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 18 -
3.1.a.17. Introducción al Control de Sistemas No Lineales, Departamento deIngeniería Eléctrica, Cuatrimestre 2008-1, 32 horas.
3.1.a.18. Matemáticas, Departamento de Ingeniería Eléctrica, Cuatrimestre 2008-3, 64horas.
3.1.a.19. Introducción al Control de Sistemas No Lineales, Departamento deIngeniería Eléctrica, Cuatrimestre 2009-1, 32 horas.
3.1.a.20. Matemáticas, Departamento de Ingeniería Eléctrica, Cuatrimestre 2009-3, 64horas.
3.1.a.21. Control de Sistemas Multi-Agente, Departamento de Ingeniería Eléctrica,Cuatrimestre 2011-2, 64 horas.
3.1.a.22. Control de Sistemas Multi-Agente, Departamento de Ingeniería Eléctrica,Cuatrimestre 2012-2, 64 horas.
3.1.a.23. Matemáticas, Departamento de Ingeniería Eléctrica, Cuatrimestre 2012-3, 32horas.
3.1.c. Programas de nivel licenciatura.
3.1.c.1. Travaux Pratiques d’Electrotechnique, Ecole Centrale de Nantes, Nantes,France, année universitaire 1991-1992, 60 horas.
3.1.c.2. Travaux Pratiques d’Electrotechnique, Ecole Centrale de Nantes, Nantes,France, année universitaire 1992-1993, 60 horas.
3.1.c.3. Travaux Dirigés d’Electrotechnique, Ecole Centrale de Nantes, Nantes,France, année universitaire 1992-1993, 37 horas.
3.1.c.4. MATH 128, Department of Mathematics and Statistics, Queen´s University,Kingston, Canada, 1995, 48 horas.
3.1.c.5. MATH 129, Department of Mathematics and Statistics, Queen´s University,Kingston, Canada, 1996, 48 horas.
3.2. Dirección de Tesis.
3.2.a. Doctorado
3.2.a.1. Rodolfo Orosco-Guerrero, Modelado, análisis y control de vehículosarticulados y robots móviles. Teoría y experimentos, Departamento de IngenieríaEléctrica, Sección de Mecatrónica, CINVESTAV-IPN, fecha de examen de grado: 31 deoctubre de 2003. Codirector de tesis: Dr. Martín Velasco-Villa.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 19 -
3.2.a.2. Paola Andréa Niño Suárez, Análisis teórico y experimental de los efectos delretardo de transporte en robots móviles, Departamento de Ingeniería Eléctrica,CINVESTAV-IPN, fecha de examen de grado: 30 de noviembre de 2006. Codirector detesis: Dr. Martín Velasco-Villa.
3.2.a.3. Victor Manuel Rejón Moo, Análisis, instrumentación y control en tiempo realde un prototipo de aeronave de despegue y aterrizaje vertical. Departamento deIngeniería Eléctrica, Sección de Mecatrónica, CINVESTAV-IPN, fecha de examen degrado: 5 de octubre de 2007. Director de Tesis: Dr. Eduardo Aranda Bricaire.
3.2.a.4. Eduardo Gamaliel Hernández Martínez, Estrategias de control para sistemasmulti-agente, Departamento de Ingeniería Eléctrica, Sección de Mecatrónica,CINVESTAV-IPN, fecha de examen de grado: 4 de Septiembre de 2009. Director deTesis: Dr. Eduardo Aranda Bricaire.
3.2.a.5. Jaime González Sierra, Emulación de estructuras mecánicas mediantesistemas multi-agente, fecha de examen de grado: 25 de mayo de 2016. Director deTesis: Dr. Eduardo Aranda Bricaire.
3.2.a.6. Jesús Santiaguillo Salinas, Coordinación de Movimiento con No Colisión paraSistemas Multi-agente, en curso. Director de Tesis: Dr. Eduardo Aranda Bricaire.
3.2.a.7. Marcos Alberto Rosaldo Serrano, Control de grupos de cuadrirotoresevitando colisiones empleando observadores de estado, en curso. Director de Tesis: Dr.Eduardo Aranda Bricaire.
3.2.b. Maestría.
3.2.b.1. B.A. Post, Computer algebra analysis of nonlinear discrete-time systems,Department of Applied Mathematics, University of Twente, Paises Bajos. Fecha deexamen de grado: 22 de diciembre de 1995.
3.2.b.2. Ricardo Juventino Uc-Caamal, Control de un manipulador con articulaciónflexible en presencia de incertidumbres paramétricas, Departamento de IngenieríaEléctrica, CINVESTAV-IPN, Fecha de examen de grado: 15 de diciembre de 1997.
3.2.b.3. Tomás Salgado-Jiménez, Diseño, construcción y control en tiempo real de unrobot móvil, Departamento de Ingeniería Eléctrica, CINVESTAV-IPN, Fecha de examende grado: 15 de diciembre de 1999. Codirector de tesis: Dr. Martín Velasco-Villa.
3.2.b.4. Carlos Paul Gonález Inda, Diseño construcción y control en tiempo real deuna grúa viajera de dos grados de libertad, Departamento de Ingeniería Eléctrica,Sección de Mecatrónica, CINVESTAV-IPN, 9 de noviembre de 2001. Codirector detesis: Dr. Martín Velasco-Villa.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 20 -
3.2.b.5. Teresa Alejandra Vidal Calleja, Generalización del método de campospotenciales artificiales para un vehículo articulado, Departamento de IngenieríaEléctrica, Sección de Mecatrónica, CINVESTAV-IPN, fecha de examen de grado: 4 dejulio de 2002. Codirector de tesis: Dr. Martín Velasco-Villa.
3.2.b.6. Juan Martín Albarrán Jiménez, Diseño, construcción y control de un robotmóvil articulado, Departamento de Ingeniería Eléctrica, Sección de Mecatrónica,CINVESTAV-IPN, fecha de examen de grado: 10 de octubre de 2003. Codirector detesis: Dr. Martín Velasco-Villa.
3.2.b.7. Francisco Jaimes Santín, Modelado y Control de Sistemas Automatizados deManufactura, Departamento de Ingeniería Eléctrica, Sección de Mecatrónica,CINVESTAV-IPN, fecha de examen de grado: 26 de octubre de 2004. Codirector detesis: Dr. Arturo Sánchez Carmona.
3.2.b.8. Ciro Jesús Gaspar Valle, Diseño y construcción de un sistema de localizaciónabsoluta mediante ultrasonido, Departamento de Ingeniería Eléctrica, Sección deMecatrónica, CINVESTAV-IPN, fecha de examen de grado: 25 de octubre de 2004.Codirector de tesis: Dr. Martín Velasco-Villa.
3.2.b.9. Eduardo Gamaliel Hernández Martínez, Modelado y control jerárquico-modular de la coordinación de recursos de sistemas de manufactura flexible,Departamento de Ingeniería Eléctrica, CINVESTAV-IPN, fecha de examen de grado: 29de septiembre de 2005. Codirector de tesis: Dr. Arturo Sánchez Carmona.
3.2.b.10. José Pedro Sánchez Santana, Control de un robot móvil mediantelocalización absoluta, Departamento de Ingeniería Eléctrica, CINVESTAV-IPN, fecha deexamen de grado: 25 de agosto de 2006. Codirector de tesis: Dr. Martín Velasco-Villa.
3.2.b.11. Heber Rivera Sánchez, Estudio comparativo de estrategias de controljerárquico-modular para sistemas automatizados de manufactura, Departamento deIngeniería Eléctrica, CINVESTAV-IPN, fecha de examen de grado: 22 de marzo de2007. Codirector de tesis: Dr. Arturo Sánchez Carmona.
3.2.b.12. Omar Alejandro Cervantes Gloria, Control de un Robot Móvil medianteRadiofrecuencia. Directores de Tesis: Dr. Eduardo Aranda Bricaire y Dr. Martín VelascoVilla. Fecha de Examen de grado: 16 de mayo de 2008.
3.2.b.13. Antonio Josué Cervantes García, Seguimiento de trayectorias mediantesistema de localización Montecarlo. Directores de Tesis: Dr. Eduardo Aranda Bricaire yDr. Martín Velasco Villa. Fecha de Examen de grado: 29 de mayo de 2009.
3.2.b.14. Jaime González Sierra, Control de marcha y orientación de sistemas multi-agentes. Director de Tesis: Dr. Eduardo Aranda Bricaire. Fecha de Examen de grado:18 de noviembre de 2010.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 21 -
3.2.b.15. Ricardo Marín San Germán, Control de formación de sistemas multi-agentescon aplicaciones a un sistema de manufactura flexible. Director de Tesis: Dr. EduardoAranda Bricaire. Fecha de Examen de grado: 24 de febrero de 2011.
3.2.b.16. David Ernesto Hernández Mendoza, Control de Formación y Marcha paraSistemas de Robots Multi-Agente Mediante Discretización de Euler. Director de Tesis:Dr. Eduardo Aranda Bricaire. Fecha de Examen de grado: 14 de noviembre de 2011.
3.2.b.17. Guillermo Rey Peñaloza Mendoza, Control de Formación tipo Convoy paraSistemas de Robots Multi-Agente. Director de Tesis: Dr. Eduardo Aranda Bricaire.Fecha de Examen de grado: 14 de noviembe de 2011.
3.2.b.18. Jesús Santiaguillo Salinas, Control de sistemas multi-agente con gráficas decomunicación intermitentes. Director de Tesis: Dr. Eduardo Aranda Bricaire. Fecha deExamen de grado: 8 de noviembre de 2012.
3.2.b.19. Francisco Rendón Benitez, Control de marcha de sistemas multi-agente conorientación a la dirección del lider. Director de Tesis: Dr. Eduardo Aranda Bricaire.Fecha de Examen de grado: 30 de noviembre de 2012.
3.2.b.19. Juan Carlos Pérez Sampieri, Control Supervisor de Sistemas Multi-agente para unaCelda de Manufactura Flexible. Directores de Tesis: Drs. Eduardo Aranda Bricaire, EduardoGamaliel Hernández Martínez. Fecha de Examen de grado: 27 de agosto de 2013.
3.2.b.20. Manuel Jesús González Balán, Coordinación de Estructuras MecánicasVirtuales. Director de Tesis: Dr. Eduardo Aranda Bricaire. Fecha de Examen de grado:26 de septiembre de 2013.
3.2.b.21. Rafael Caballero Eslava, Estudio Comparativo de Estrategias de No Colisiónpara Sistemas Multi Agente. Director de Tesis: Dr. Eduardo Aranda Bricaire. Fecha deExamen de grado: 22 de noviembre de 2013.
3.2.b.22. Marcos Alberto Rosaldo Serrano, Coordinación de movimiento para agentesheterogéneos. Director de Tesis: Dr. Eduardo Aranda Bricaire, Fecha de Examen degrado: 18 de noviembre de 2014.
3.2.b.23. Mauricio Méndez Martínez, Control de vuelo en configurción líder-seguidorpara aeronaves tipo cuadrirotor. Director de Tesis: Dr. Eduardo Aranda Bricaire,Fecha de Examen de grado:13 de febrero de 2015.
3.2.b.24 Aarón Josafat Hernández Mejía, Control de posición de un objeto pendientede un cuadrirotor en el plano vertical. Director de Tesis: Dr. Eduardo Aranda Bricaire,Fecha de Examen de grado: 20 de noviembre de 2015.
3.2.c. Licenciatura
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 22 -

3.2.c.1. Liliana García Alonso, Robot móvil teledirigido para seguimiento detrayectorias, Unidad Profesional Interdisciplinaria en Ingeniería y TecnologíasAvanzadas del IPN, Directores de Tesis: Dr. Eduardo Aranda Bricaire y Dr. MartínVelasco Villa. Fecha de Examen de grado: 16 de enero de 2009.
3.2.c.2. Reyna Reyes Delgado, Robot móvil teledirigido para seguimiento detrayectorias, Unidad Profesional Interdisciplinaria en Ingeniería y TecnologíasAvanzadas del IPN, Directores de Tesis: Dr. Eduardo Aranda Bricaire y Dr. MartínVelasco Villa. Fecha de Examen de grado: 16 de enero de 2009.
4. PROYECTOS DE INVESTIGACIÓN
4.1. Responsable del Proyecto CONACYT No. 26356-A, “Estabilización de sistemasno lineales”, vigente del 16 febrero de 1998 al 31 de agosto de 2000. Recursosrecibidos: $342,204.00
4.2. Participante del Proyecto CONACYT No. 34850-A, “Desarrollo de robots móvilesy vehículos inteligentes”, vigente de octubre de 2000 a octubre de 2002. Recursosrecibidos: $417,240.00
4.3. Responsable del Proyecto CONACYT-SEP No. 42093-Y, “Análisis y control desistemas no lineales en tiempo discreto” vigente de abril de 2003 a marzo de 2005.Recursos recibidos: $328,700.00
5. CRITERIOS DE REPERCUSION ACADEMICA
5.1. Pertenencia a Sociedades Científicas
Miembro Regular de la Academia Mexicana de Ciencias (desde 1998). Secretario de la Asociación de México de Control Automático durante el bienio 2002-
2003. Vicepresidente de la Asociación de México de Control Automático durante el bienio
2004-2005. Presidente de la Asociación de México de Control Automático durante el bienio
2006-2007.
5.2. Arbitro para las siguientes revistas de prestigio internacional:
IEEE Transactions on Automatic Control Automatica SIAM Journal on Control and Optimization Systems and Control Letters International Journal of Control Mathematical Reviews European Journal of Control Mathematics of Control, Signals and Systems.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 23 -
5.3. Participación en la Organización de Congresos Internacionales:
Moderador de una sesión invitada durante el Congreso Mundial de la FederaciónInternacional de Control Automático (IFAC), San Francisco, julio de 1996.
Moderador de una sesión ordinaria durante la Conferencia Europea de ControlAutomático, Bruselas, Bélgica, julio de 1997.
Miembro del International Program Committee del 14th Mediterranean Conferenceon Control and Automation, Ancona, Italia, 28-30 June 2006.
Miembro del International Program Committee del 7th IFAC Symposium onNonlinear Control Systems, Pretoria, South Africa, 22-24 August 2007.
Miembro del International Program Committee del 8th IFAC Symposium onNonlinear Control Systems, Bologna, Italy, 1-3 September 2010.
Miembro del International Program Committee del 9th IFAC Symposium onNonlinear Control Systems, Toulouse, France, 4-6 September 2010.
Editor Asociado del 20th IFAC World Congress (IFAC WC 2017) to be held inToulouse Convention Center, Toulouse, France during July 9-14, 2017.
5.4. Participación en la Organización de Congresos Nacionales:
Presidente del Comité Organizador de la Quinta Conferencia de Ingeniería Eléctrica,celebrada en la Unidad Zacatenco del CINVESTAV-IPN en septiembre de 1999.
Presidente del Comité Organizador del Congreso Anual de la Asociación de Méxicode Control Automático, Ensenada, Baja California, octubre 2003.
5.5. Invitaciones como Conferencista Plenario
Presentación de la Conferencia Plenaria “Formas diferenciales y sus aplicaciones encontrol automático”, durante el X Congreso Latinoamericano de Control Automático,celebrado en Guadalajara, Jalisco, diciembre 2002.
5.6. Citas a trabajos de investigación.
De acuerdo a Google Scholar, los trabajos de investigación del Dr. Aranda-Bricairecuentan con alrededor de 900 citas y un factor h de 12.
De acuerdo al Web of Science de Thomson Reuters, los trabajos de investigacióndel Dr. Aranda-Bricaire cuentan con alrededor de 260 citas, excluyendo auto citasa todos los autores.
De acuerdo al Web of Science de Thomson Reuters, los siguientes artículos hansido citados de manera extraordinaria:
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 24 -
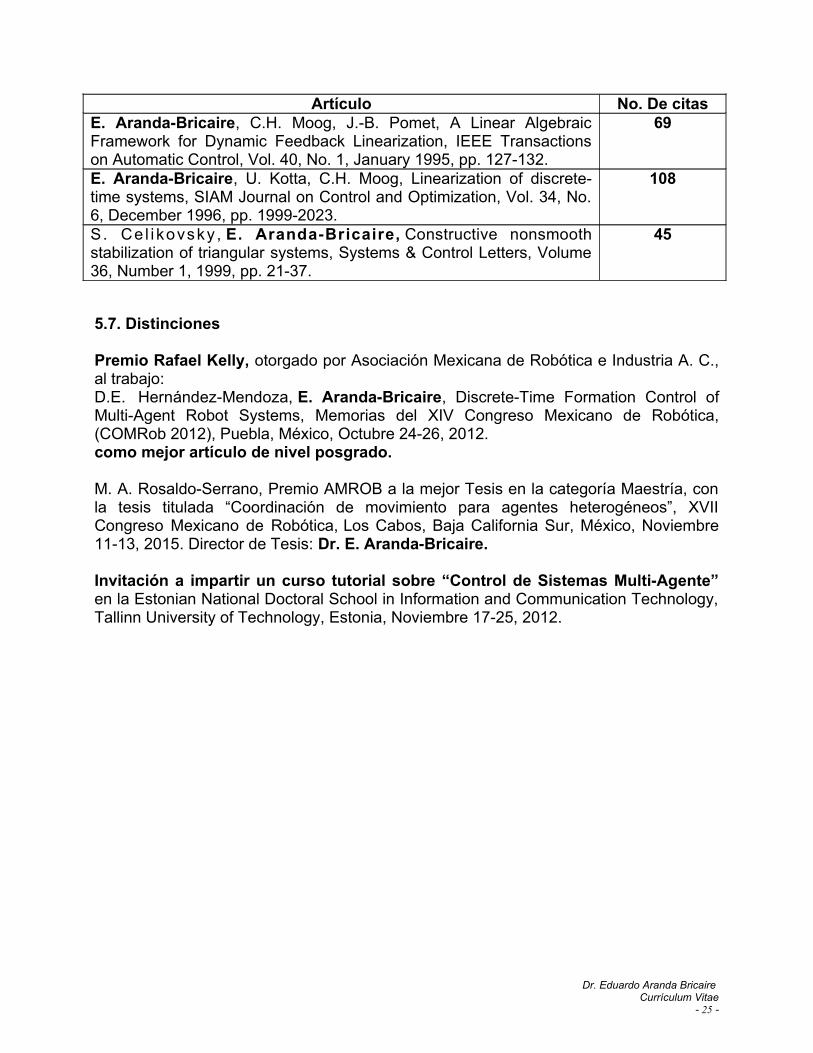
Artículo No. De citasE. Aranda-Bricaire, C.H. Moog, J.-B. Pomet, A Linear AlgebraicFramework for Dynamic Feedback Linearization, IEEE Transactionson Automatic Control, Vol. 40, No. 1, January 1995, pp. 127-132.
69
E. Aranda-Bricaire, U. Kotta, C.H. Moog, Linearization of discrete-time systems, SIAM Journal on Control and Optimization, Vol. 34, No.6, December 1996, pp. 1999-2023.
108
S. Ce l i kovsky , E. Aranda-Bricaire, Constructive nonsmoothstabilization of triangular systems, Systems & Control Letters, Volume36, Number 1, 1999, pp. 21-37.
45
5.7. Distinciones
Premio Rafael Kelly, otorgado por Asociación Mexicana de Robótica e Industria A. C.,al trabajo: D.E. Hernández-Mendoza, E. Aranda-Bricaire, Discrete-Time Formation Control ofMulti-Agent Robot Systems, Memorias del XIV Congreso Mexicano de Robótica,(COMRob 2012), Puebla, México, Octubre 24-26, 2012.como mejor artículo de nivel posgrado.
M. A. Rosaldo-Serrano, Premio AMROB a la mejor Tesis en la categoría Maestría, conla tesis titulada “Coordinación de movimiento para agentes heterogéneos”, XVIICongreso Mexicano de Robótica, Los Cabos, Baja California Sur, México, Noviembre11-13, 2015. Director de Tesis: Dr. E. Aranda-Bricaire.
Invitación a impartir un curso tutorial sobre “Control de Sistemas Multi-Agente”en la Estonian National Doctoral School in Information and Communication Technology,Tallinn University of Technology, Estonia, Noviembre 17-25, 2012.
Dr. Eduardo Aranda Bricaire Currículum Vitae
- 25 -





























