Embed Size (px)
Citation preview

Curso de Engenharia de Computação
PROJETO DE CONSTRUÇÃO DE UM ROBÔ EXPLORADOR
Ricardo Brino
Campinas – São Paulo – Brasil
Dezembro de 2008
Curso de Engenharia de Computação
PROJETO DE CONSTRUÇÃO DE UM ROBÔ EXPLORADOR
Ricardo Brino
Monografia apresentada à disciplina de Trabalho de Conclusão do Curso de Engenharia de Computação da Universidade São Francisco, sob a orientação do Prof. Dr. Claudio Kiyoshi Umezu, como exigência parcial para conclusão do curso de graduação.
Orientador: Prof. Dr. Claudio Kiyoshi Umezu
Campinas – São Paulo – Brasil
Dezembro de 2008
Robô explorador
Ricardo Brino
Monografia defendida e aprovada em 11 de Dezembro de 2008 pela Banca
Examinadora assim constituída:
Prof. Dr. Claudio Kiyoshi Umezu (Orientador)
USF – Universidade São Francisco – Campinas – SP.
Prof. Dr. Ely Carneiro de Paiva
USF – Universidade São Francisco – Campinas – SP.
Prof. Dr. Claudio Maximiliano Zaina
USF – Universidade São Francisco – Campinas – SP.

Dedico o trabalho à minha noiva Juliana que me
apoiou desde o início e teve paciência para
compartilhar minha companhia com o TCC
durante os 14 meses de desenvolvimento. Dedico
também ao meu pai Luiz que espera ansioso pela
conclusão do meu curso.

v
Agradecimentos
Agradeço a Deus por iluminar meu caminho durante as dificuldades encontradas ao longo da
vida. Também agradeço aos meus pais pela educação e principalmente pelo modelo de caráter
e moral que me deram desde a infância. Aos professores que me incentivaram a prosseguir
com o projeto, mesmo nos momentos difíceis e de desânimo, em especial ao professor Dr.
André Leon Sampaio Gradvohl, coordenador do curso de Engenharia da Computação. Por
fim, agradeço aos professores Luiz Sergio Conceição, primeiro orientador do TCC, e Dr.
Cláudio Kiyoshi Umezu, atual orientador, por aceitarem a tarefa de orientação e emprestarem
seu vasto conhecimento para este trabalho.
vi
Sumário
Lista de Siglas........................................................................................................................ viii
Lista de Figuras........................................................................................................................ix
Resumo......................................................................................................................................xi
Abstract.....................................................................................................................................xi
1 Introdução...........................................................................................................................1 1.1 Contextualização ...........................................................................................................1 1.2 Definição do problema a ser tratado..............................................................................2 1.3 Estrutura do Texto .........................................................................................................2
2 Revisão bibliográfica..........................................................................................................3 2.1 Robótica.........................................................................................................................3 2.2 Direção Diferencial........................................................................................................4 2.3 Esteira tipo lagarta .........................................................................................................4 2.4 Conexão wireless tipo Ad-hoc .......................................................................................5 2.5 Motor de passo ..............................................................................................................5 2.6 Porta Paralela.................................................................................................................6
3 Desenvolvimento do Projeto..............................................................................................7 3.1 Estrutura ........................................................................................................................7
3.1.1 Gabinetes ................................................................................................................7 3.2 Esteira de tração.............................................................................................................8
3.2.1 Fixação da esteira....................................................................................................9 3.2.2 Aumento da capacidade de tração.........................................................................10
3.3 Sistema de tração .........................................................................................................11 3.4 Drive para motores ......................................................................................................12
3.4.1 Motor de tração.....................................................................................................12 3.4.2 Motor de passo......................................................................................................13
3.5 Captura de imagem......................................................................................................14 3.5.1 WebCam ................................................................................................................14 3.5.2 Movimento horizontal...........................................................................................14 3.5.3 Movimento vertical...............................................................................................14 3.5.4 Acoplamentos e engrenagens................................................................................15 3.5.5 Iluminação ............................................................................................................15
3.6 Sistema Computacional ...............................................................................................16 3.7 Alimentação do sistema...............................................................................................17 3.8 Conexão Wireless ........................................................................................................18
3.8.1 Controle remoto ....................................................................................................18 3.9 Software.......................................................................................................................19
3.9.1 Interface ................................................................................................................19

vii
3.9.2 Lógica de controle ................................................................................................20 3.9.3 Sistema Operacional .............................................................................................23
3.10 Teste do robô ...............................................................................................................23
4 Conclusão ..........................................................................................................................25 4.1 Contribuições...............................................................................................................25 4.2 Trabalhos futuros.........................................................................................................25
Referências Bibliográficas......................................................................................................27

viii
Lista de Siglas
IEEE Institute of Electrical and Electronics Engineers ou Instituto de Engenheiros
Elétricos e Eletrônicos
IDE Ferramenta gráfica para programação/compilação de linguagens
USB Universal Serial Bus ou Barramento Universal Serial
PCI Peripheral Component Interconnect ou Interface de Interconexão de Periféricos
DDR Double Data Rating - Tipo de memória de computadores com o dobro da taxa
de transferência das memórias convencionais
DC Direct Current - Corrente contínua
ix
Lista de Figuras
FIGURA 1 – TRATOR.....................................................................................................................4
FIGURA 2 - TANQUE DE GUERRA..................................................................................................4
FIGURA 3 - GABINETES EMENDADOS E CORTADOS .......................................................................7
FIGURA 4 - TAMPA INFERIOR DIANTEIRA......................................................................................7
FIGURA 5 - GABINETES PRONTOS .................................................................................................8
FIGURA 6 - GABINETES FECHADOS...............................................................................................8
FIGURA 7 - COROA DE BICICLETA.................................................................................................8
FIGURA 8 - COROAS UNIDAS ........................................................................................................8
FIGURA 9 - CUBO DE RODA DE BICICLETA ....................................................................................9
FIGURA 10 - CUDO DE RODA COM COROAS PRESAS ......................................................................9
FIGURA 11 - PLACA MADEIRA COMPENSADA................................................................................9
FIGURA 12 - CUBOS AFIXADOS NA PLACA ....................................................................................9
FIGURA 13 - OUTRA FOTO DA PLACA .........................................................................................10
FIGURA 14 - CONJUNTO ESTEIRA PRONTO..................................................................................10
FIGURA 15 - CÂMARA DE AR PARAFUSADA................................................................................10
FIGURA 16 - MOTOR DE VIDRO ELÉTRICO COM CAIXA DE REDUÇÃO EMBUTIDA .........................11
FIGURA 17 - LOCAL DE INSTALAÇÃO DO MOTOR........................................................................12
FIGURA 18 - LUVA E FUROS NOS EIXOS ......................................................................................12
FIGURA 19 - PLACA RE24/10.....................................................................................................12
FIGURA 20 - TABELA DE CONTROLE...........................................................................................12
FIGURA 21 - ESQUEMA ELETRÔNICO ..........................................................................................13
FIGURA 22 - PLACA SM4-2........................................................................................................13
FIGURA 23 - MOTOR DE PASSO...................................................................................................14
FIGURA 24 - CÂMERA MONTADA ...............................................................................................15
FIGURA 25 - ESQUEMA ELETRÔNICO DO SISTEMA DE ILUMINAÇÃO ............................................16
FIGURA 26 - ILUMINAÇÃO DA CÂMERA ......................................................................................16
FIGURA 27 - SISTEMA COMPUTACIONAL DENTRO DO ROBÔ .......................................................17
FIGURA 28 - BATERIA ................................................................................................................17
FIGURA 29 - CONFIGURAÇÃO DE REDE.......................................................................................18
FIGURA 30 - INTERFACE DO SOFTWARE DE CONTROLE...............................................................20
x
FIGURA 31 - CONTROLE DO ROBÔ ..............................................................................................20
FIGURA 32 - CONTROLE DA CÂMERA .........................................................................................20
FIGURA 33 - ROTINA DE LEITURA DO TECLADO..........................................................................21
FIGURA 34 - TABELA VERDADE MEIO-PASSO..............................................................................21
FIGURA 35 - LÓGICA DE CONTROLE DOS MOTORES DA CÂMERA.................................................22
FIGURA 36 - LIGAÇÃO LPT1.......................................................................................................23
FIGURA 37 - LIGAÇÃO LPT2.......................................................................................................23

xi
Resumo
Este documento descreve a construção de um protótipo de robô explorador com a
utilização de peças usadas retiradas de outros equipamentos. Além de demonstrar a interação
entre dispositivos eletrônicos como motores de passo e lógica de programação em linguagem
Delphi/Object Pascal.
PALAVRAS-CHAVE: Robô explorador, Motor de passo, Delphi.
Abstract
This document describes the construction of a prototype a robot explorer with the use
of used parts removed from other equipment. In addition to demonstrate the interaction
between electronic devices such as stepper motors and logic programming language Delphi /
Object Pascal.
KEY WORDS: Robot explorer, Stepper Motor, Delphi.
1
1 INTRODUÇÃO
1.1 Contextualização
O termo “robô” tem origem na palavra checa robota, que significa “trabalho forçado”.
Explorador é um tipo de robô capaz de percorrer terrenos acidentados ou áreas de difícil
acesso ao homem.
Algumas tarefas em que a vida humana corre risco, devem contar com o auxílio de
robôs para sua execução. Desativação de bombas, acesso a áreas com incêndio ou gases
perigosos, são apenas alguns exemplos das diversas aplicações em que um robô pode, e deve
ser utilizado. Existem também serviços domésticos, como limpeza e segurança de ambientes,
que podem ser atribuídos a essas máquinas.
Os robôs são normalmente controlados remotamente por um ser humano, havendo a
simulação de presença humana. Há alguns que também possuem certa inteligência e podem
tomar decisões independentes, tornando-os autônomos. Não é o caso do robô desse projeto,
que conta somente com o controle remoto.
Construir um robô do tipo explorador, para ambientes terrestres, utilizando o máximo
de peças de equipamentos usados ou disponíveis comercialmente, era um sonho pessoal que
se tornou projeto de TCC.
O robô desenvolvido não tem um braço mecânico, nem programação inteligente
devido ao aumento do tempo de execução e complexidade gerada, cabendo isto às futuras
implementações.
Apesar de o objetivo ser construí-lo a partir de peças consideradas como sucatas,
algumas peças como, por exemplo, pequenas luvas de conexão dos motores à tração, foram
confeccionadas no torno de propriedade da Universidade São Francisco, Campus de
Campinas.
A utilização da robótica em diversas as áreas demonstra o potencial deste mercado que
movimenta bilhões de dólares e é muito competitivo, favorecendo os consumidores dos
serviços oferecidos por essas máquinas, gerando conforto e poupando vidas.
2
1.2 Definição do problema a ser tratado
O objetivo deste trabalho foi demonstrar a interação entre dispositivos eletrônicos e a
lógica de programação com soluções baseadas no conceito da reutilização de peças
descartadas, construindo um robô explorador.
1.3 Estrutura do Texto
A Seção 2 trata de conceituar alguns conteúdos importantes e relevantes mencionados
na seção de desenvolvimento. A Seção 3 relata as etapas de desenvolvimento do protótipo e
testes. A Seção 4 finaliza com conclusões e possíveis contribuições para futuros trabalhos.
3
2 REVISÃO BIBLIOGRÁFICA
Visando conceituar alguns conteúdos citados no desenvolvimento, os itens a seguir
foram criados. O item 2.1 faz uma explanação sobre robótica em geral. O modo de locomoção
do robô possui algumas características de fundamental importância na lógica do software de
controle e são explicadas no item 2.2. A conexão wireless do tipo Ad-hoc atende
perfeitamente às necessidades do modelo de controle remoto adotado e, por isso, há um item
exclusivo, o de número 2.4.
Os motores de passo, utilizados nos movimentos da câmera, são motores que possuem
particularidades que são explicadas no item 2.5. O projeto do robô utiliza a porta paralela
como meio de controle dos motores e por isso, uma explicação sobre seu funcionamento foi
feita no item 2.6.
2.1 Robótica
Robótica é um ramo da tecnologia que engloba mecânica, eletricidade, eletrônica e
computação. O termo Robótica foi criado pelo escritor de ficção cientifica Isaac Asimov, no
seu romance "I, Robot" (Eu, Robô), de 1948. Neste mesmo livro, Asimov criou leis, que
segundo ele, regeriam os robôs no futuro.
Leis da robótica:
1ª) Um robô não pode fazer mal a um ser humano e nem, por omissão, permitir que
algum mal lhe aconteça.
2ª) Um robô deve obedecer às ordens dos seres humanos, exceto quando estas
contrariarem a Primeira Lei.
3ª) Um robô deve proteger a sua integridade física, desde que, com isto, não contrarie
a Primeira e a Segunda Leis.
4
2.2 Direção Diferencial
Esse modo de locomoção consiste em dois conjuntos de tração compostos por rodas
fixas (não direcionais) ou esteiras, dispostos em paralelo. Este conjunto permite a realização
dos seguintes movimentos:
Em linha reta: quando as duas rodas ou esteiras movimentam-se na mesma
velocidade.
Em forma de arco: quando as rodas ou esteiras apresentam velocidades diferentes.
Em volta do seu próprio eixo: quando vd = -ve, onde vd é a velocidade da roda ou
esteira direita e ve é a velocidade da roda ou esteira esquerda.
Esse tipo de direção é sensível a velocidade relativa das duas rodas ou esteiras, ou
seja, um pequeno erro resulta em diferentes trajetórias.
2.3 Esteira tipo lagarta
Seu nome originou-se da analogia com o movimento de uma lagarta. Esse tipo de
esteira é utilizado em tratores (Figura 1) e tanques de guerra (Figura 2) que, por aumentar a
área de contato com o solo, melhora a capacidade de tração. Outra vantagem deste sistema de
tração é que ele causa uma pequena compactação do solo, sendo ideal para terrenos alagados
ou com baixa capacidade de sustentação.
Figura 1 – Trator Figura 2 - Tanque de Guerra
5
2.4 Conexão wireless tipo Ad-hoc
A conexão wireless tem como principal atrativo a eliminação de fios em uma rede de
computadores e a mobilidade fornecida por este tipo de conexão possibilitou a criação de
diversos equipamentos que interagem entre si.
Em um enlace de rede padrão, sempre há no mínimo um gateway que gerencia os
demais hosts. Existem vários modelos de conexões wireless e dentre eles há o chamado Ad-
hoc. Essa conexão elimina a necessidade de um gerenciador ou centralizador da rede como,
por exemplo, um roteador. Dessa maneira, a conexão Ad-hoc possibilita a comunicação
diretamente entre dois dispositivos.
O padrão utilizado é o IEEE 802.11g que oferece velocidades de 54Mbps operando em
uma freqüência de 2,4GHz.
2.5 Motor de passo
Motores de passos são dispositivos mecânicos e eletro-magnéticos que podem ser
controlados digitalmente através de um hardware específico ou através de softwares. Eles são
encontrados em aparelhos onde a precisão é um fator muito importante. São usados em larga
escala em impressoras, plotters, scanners, drivers de disquetes, discos rígidos e muitos outros
aparelhos.
Existem três estados possíveis de um motor de passo:
Desligado: Não há alimentação suprindo o motor. Nesse caso não existe consumo
de energia, e todas as bobinas estão desligadas. Na maioria dos circuitos este estado
ocorre quando a fonte de alimentação é desligada.
Parado: Pelo menos uma das bobinas fica energizada e o motor permanece estático
num determinado sentido. Nesse caso há consumo de energia, mas em
compensação o motor se mantém alinhado numa posição fixa.
Rodando: As bobinas são energizadas em intervalos de tempos determinados,
impulsionando o motor a girar numa direção.
São três modos de acionamento dos motores:
1. Passo completo 1 (Full-step)
Somente uma bobina é energizada a cada passo;
Menor torque;

6
Menor consumo de energia;
Maior velocidade.
2. Passo completo 2 (Full-step)
Duas bobinas são energizadas a cada passo;
Maior torque;
Maior consumo de energia se comparado ao Passo completo 1;
Maior velocidade.
3. Meio passo (Half-step)
A combinação do passo completo1 e do passo completo 2 gera um
efeito de meio passo;
Consome mais energia que os passos anteriores;
É muito mais preciso que os passos anteriores;
O torque é próximo ao do passo completo 2;
A velocidade é menor que as dos passos anteriores.
2.6 Porta Paralela
A porta paralela foi criada pela empresa IBM com o objetivo de conectar uma
impressora a um computador, mas sua utilização foi bem mais abrangente do que isso. A
porta paralela é uma interface de comunicação bastante utilizada em projetos de automação
porque o acionamento de periféricos.em geral é muito simples. Ela conta oito pinos para saída
de dados, cinco pinos para entrada e outros cinco pinos com aterramento.
Na comunicação pela porta paralela, grupos de bits são enviados simultaneamente
através das oito saídas. Basta enviar, via software, um bit ativo em determinada posição, para
a porta paralela enviar um sinal de 5V na respectiva saída.
As portas paralelas possuem endereços de acesso 378H e 278H e comumente são
conhecidas por Lpt1 e Lpt2, respectivamente.
7
3 DESENVOLVIMENTO DO PROJETO
3.1 Estrutura
A estrutura do robô foi montada a partir da união de dois gabinetes de computadores. Os
componentes do computador (placa-mãe, processador, memória, disco rígido e fonte) foram
instalados na parte traseira juntamente com as duas baterias e os motores de tração, placas
eletrônicas de controle e o sistema de câmera foram instalados na parte dianteira.
3.1.1 Gabinetes
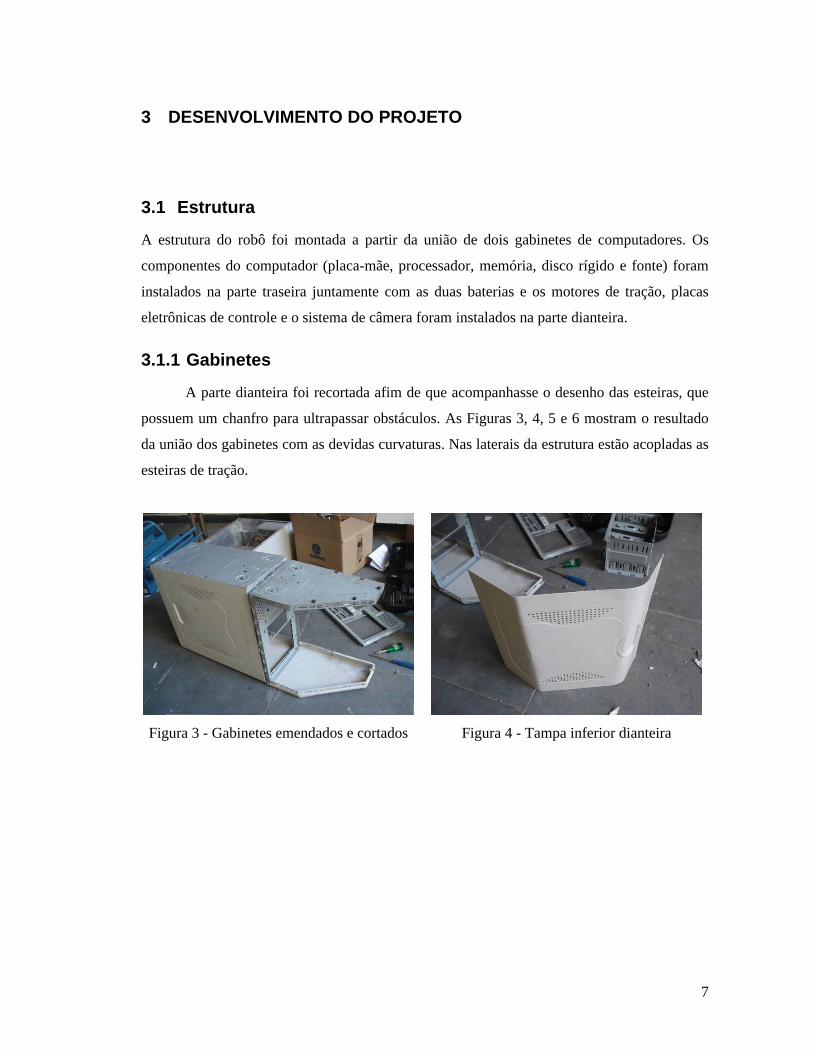
A parte dianteira foi recortada afim de que acompanhasse o desenho das esteiras, que
possuem um chanfro para ultrapassar obstáculos. As Figuras 3, 4, 5 e 6 mostram o resultado
da união dos gabinetes com as devidas curvaturas. Nas laterais da estrutura estão acopladas as
esteiras de tração.
Figura 3 - Gabinetes emendados e cortados Figura 4 - Tampa inferior dianteira

8
Figura 5 - Gabinetes prontos Figura 6 - Gabinetes fechados
3.2 Esteira de tração
A esteira de tração foi montada com duas rodas em contato com o chão e a terceira
suspensa, formando uma inclinação na parte dianteira, garantindo ao robô a mobilidade por
solos irregulares e a capacidade de transpor obstáculos.
Foram utilizadas coroas (Figura 7) e correntes de bicicletas para construir as esteiras.
As coroas possuem 36 dentes e foram unidas aos pares para formarem cada roda, conforme a
Figura 8. As correntes que formam a esteira também foram montadas em paralelo, unidas
lateralmente por parafusos transpassados pelos elos das correntes.
Figura 7 - Coroa de bicicleta Figura 8 - Coroas unidas
Os eixos da esteira foram feitos com cubos de roda de bicicleta (Figura 9), pois eles
possuem rolamentos, uma estrutura resistente e contam com um eixo para ligar as coroas aos
motores de tração.
9
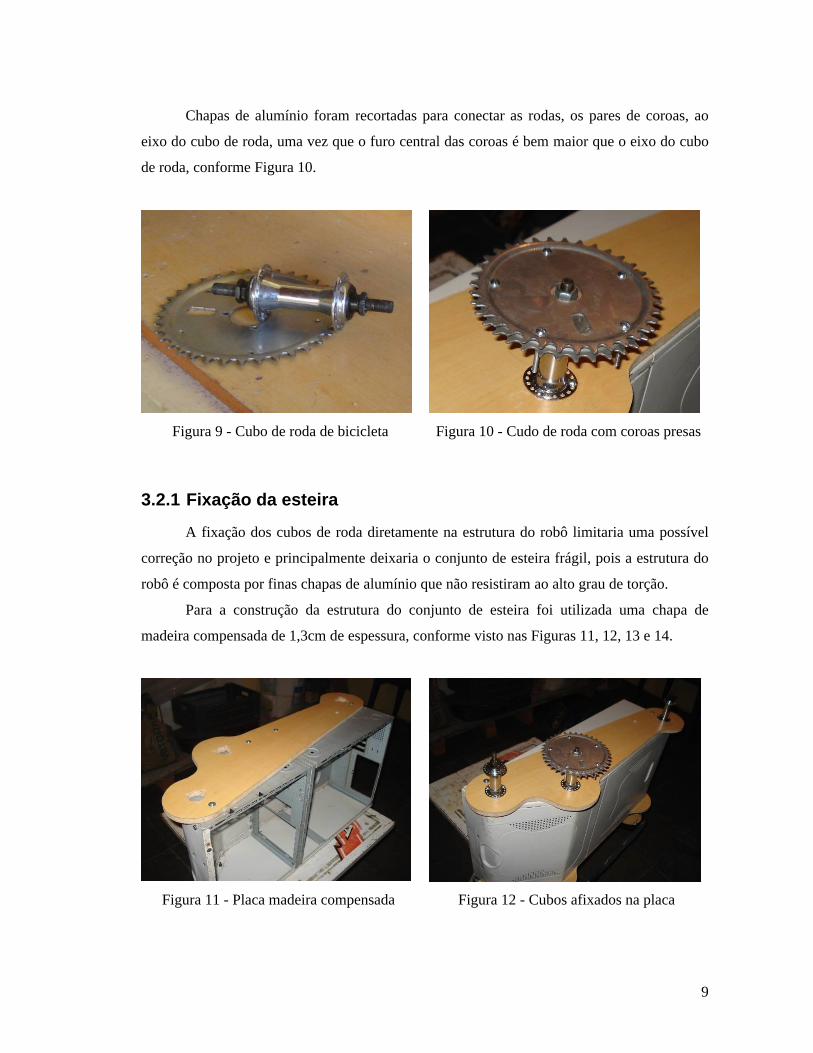
Chapas de alumínio foram recortadas para conectar as rodas, os pares de coroas, ao
eixo do cubo de roda, uma vez que o furo central das coroas é bem maior que o eixo do cubo
de roda, conforme Figura 10.
Figura 9 - Cubo de roda de bicicleta Figura 10 - Cudo de roda com coroas presas
3.2.1 Fixação da esteira
A fixação dos cubos de roda diretamente na estrutura do robô limitaria uma possível
correção no projeto e principalmente deixaria o conjunto de esteira frágil, pois a estrutura do
robô é composta por finas chapas de alumínio que não resistiram ao alto grau de torção.
Para a construção da estrutura do conjunto de esteira foi utilizada uma chapa de
madeira compensada de 1,3cm de espessura, conforme visto nas Figuras 11, 12, 13 e 14.
Figura 11 - Placa madeira compensada Figura 12 - Cubos afixados na placa

10
Figura 13 - Outra foto da placa Figura 14 - Conjunto esteira pronto
3.2.2 Aumento da capacidade de tração
A utilização das correntes diretamente no chão poderia gerar uma série de problemas
com relação ao atrito, pois as correntes além de serem de metal, são banhadas com óleo
lubrificante, e isso certamente prejudicaria a tração do robô.
A partir de câmaras de ar de roda de automóveis cortaram-se tiras com
aproximadamente 5cm de largura para envolver a corrente, conforme ilustrado na Figura 15.
Os mesmos parafusos que transpassam as correntes foram utilizados para fixar as tiras de
borracha.
Figura 15 - Câmara de ar parafusada
11
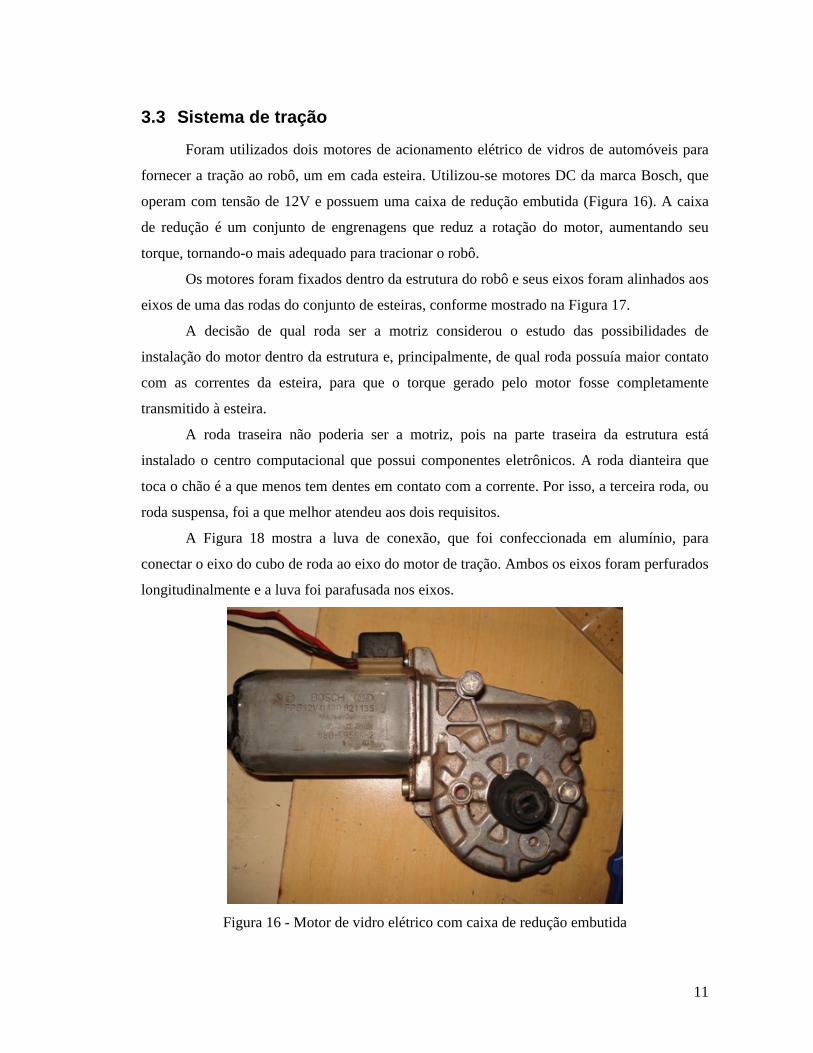
3.3 Sistema de tração
Foram utilizados dois motores de acionamento elétrico de vidros de automóveis para
fornecer a tração ao robô, um em cada esteira. Utilizou-se motores DC da marca Bosch, que
operam com tensão de 12V e possuem uma caixa de redução embutida (Figura 16). A caixa
de redução é um conjunto de engrenagens que reduz a rotação do motor, aumentando seu
torque, tornando-o mais adequado para tracionar o robô.
Os motores foram fixados dentro da estrutura do robô e seus eixos foram alinhados aos
eixos de uma das rodas do conjunto de esteiras, conforme mostrado na Figura 17.
A decisão de qual roda ser a motriz considerou o estudo das possibilidades de
instalação do motor dentro da estrutura e, principalmente, de qual roda possuía maior contato
com as correntes da esteira, para que o torque gerado pelo motor fosse completamente
transmitido à esteira.
A roda traseira não poderia ser a motriz, pois na parte traseira da estrutura está
instalado o centro computacional que possui componentes eletrônicos. A roda dianteira que
toca o chão é a que menos tem dentes em contato com a corrente. Por isso, a terceira roda, ou
roda suspensa, foi a que melhor atendeu aos dois requisitos.
A Figura 18 mostra a luva de conexão, que foi confeccionada em alumínio, para
conectar o eixo do cubo de roda ao eixo do motor de tração. Ambos os eixos foram perfurados
longitudinalmente e a luva foi parafusada nos eixos.
Figura 16 - Motor de vidro elétrico com caixa de redução embutida

12
Figura 17 - Local de instalação do motor Figura 18 - Luva e furos nos eixos
3.4 Drive para motores
Drive é o termo utilizado para denominar as placas eletrônicas para acionamento de
motores. Sua função é realizar a interface entre os motores e o sistema computacional.
Existem inúmeros tipos e modelos de drives de acordo com a aplicação.
3.4.1 Motor de tração
A placa utilizada para controle dos motores de tração é chamada de Relé de Reversão,
modelo RE24/10 do fabricante T&S Equipamento e é mostrada na Figura 19. Tal placa possui
uma lógica de acionamento do motor para ambos os sentidos. Com isso, o robô pode mover-
se para frente e para trás. A Figura 20 mostra a tabela de sinais de controle.
Figura 19 - Placa RE24/10 Figura 20 - Tabela de controle
No momento da inicialização do sistema a placa RE24/10 recebe uma alimentação de
12V e os sinais de A e B recebem 0, pois não há sinal oriundo dos respectivos pinos da porta
paralela. Com isso ocorre o acionamento dos motores no modo direto. Para evitar tal
13
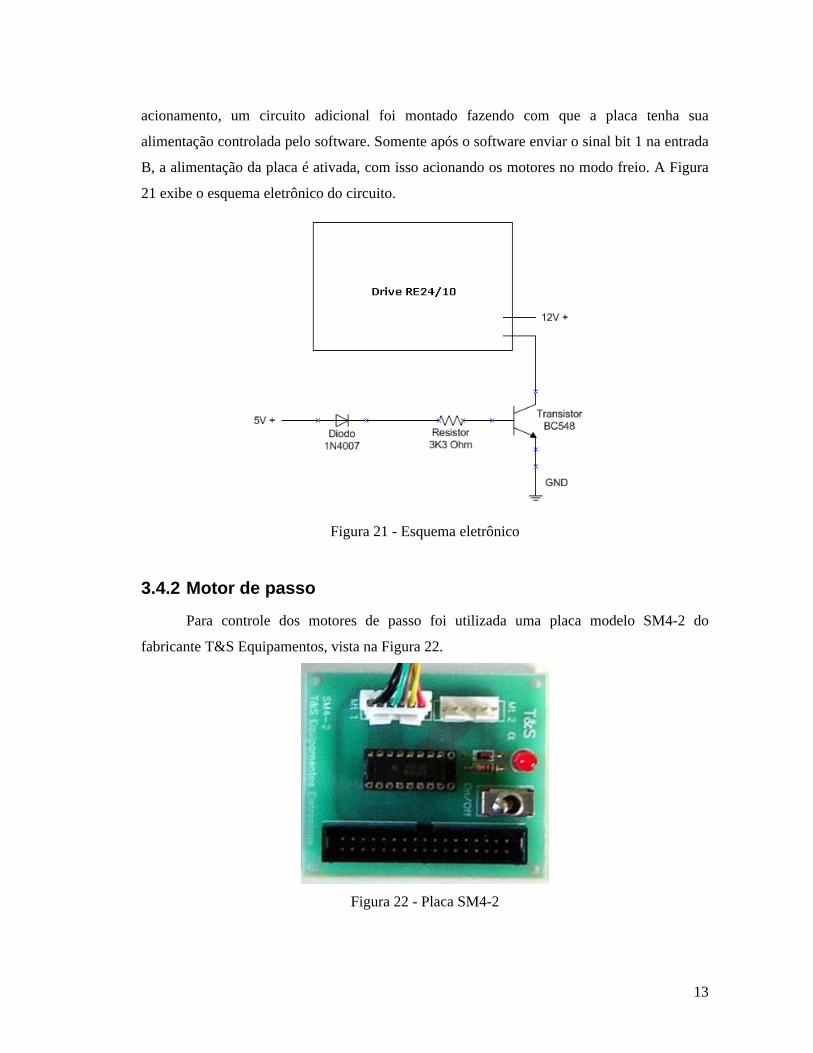
acionamento, um circuito adicional foi montado fazendo com que a placa tenha sua
alimentação controlada pelo software. Somente após o software enviar o sinal bit 1 na entrada
B, a alimentação da placa é ativada, com isso acionando os motores no modo freio. A Figura
21 exibe o esquema eletrônico do circuito.
Figura 21 - Esquema eletrônico
3.4.2 Motor de passo
Para controle dos motores de passo foi utilizada uma placa modelo SM4-2 do
fabricante T&S Equipamentos, vista na Figura 22.
Figura 22 - Placa SM4-2
14
3.5 Captura de imagem
Utilizou-se uma câmera digital para realizar a captura de imagem do ambiente ao
redor do robô. A câmera foi acoplada a um conjunto de motores e engrenagens para realizar
os movimentos vertical e horizontal.
3.5.1 WebCam
Foi utilizada uma Webcam, com conexão via porta USB que captura imagens com
resolução de 320 x 240 pixels e 640 x 480 pixels. Utilizou-se a resolução 320 x 240 pixels,
devido ao layout da inteface do software de controle.
Da câmera original utilizou-se apenas o circuito eletrônico e cabo USB.
3.5.2 Movimento horizontal
O movimento horizontal, que é comumente chamado de “pan”, é realizado por um
motor de passo de impressora matricial. É o modelo BS052-17, do fabricante Alkon
Tecnologia Ltda, que opera com tensão de 12V e corrente de 200 mA. Esse motor foi
acoplado a uma base de apoio.
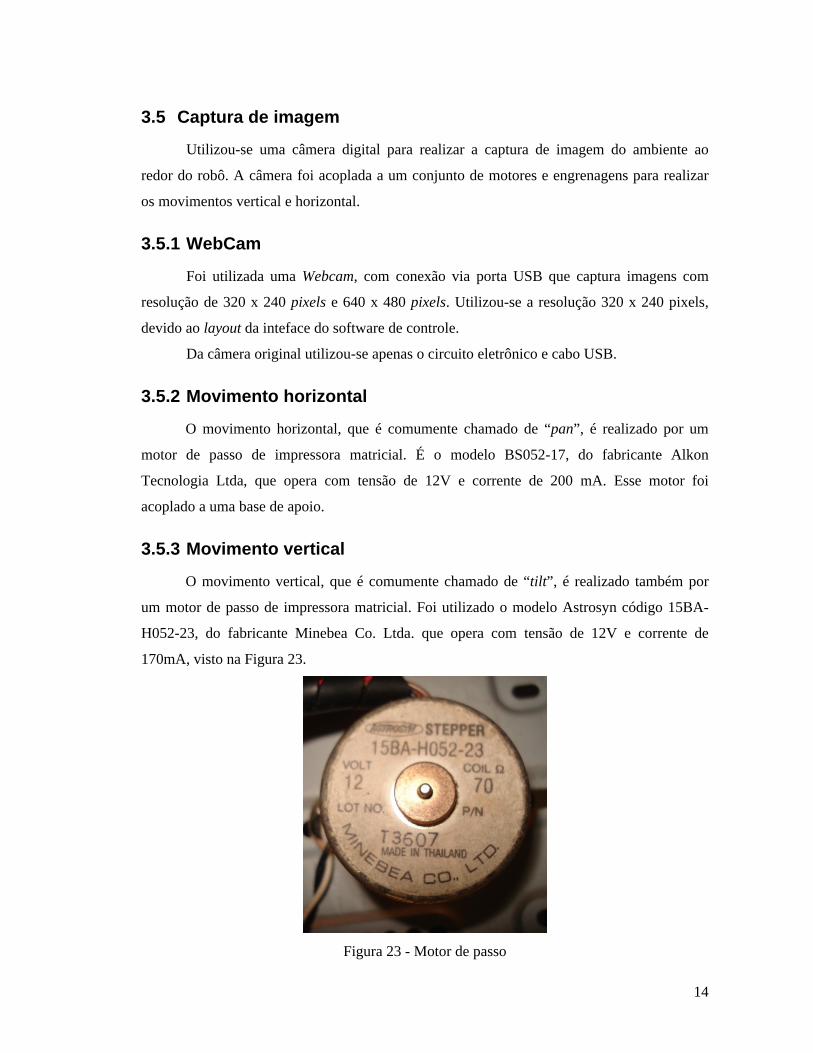
3.5.3 Movimento vertical
O movimento vertical, que é comumente chamado de “tilt”, é realizado também por
um motor de passo de impressora matricial. Foi utilizado o modelo Astrosyn código 15BA-
H052-23, do fabricante Minebea Co. Ltda. que opera com tensão de 12V e corrente de
170mA, visto na Figura 23.
Figura 23 - Motor de passo
15
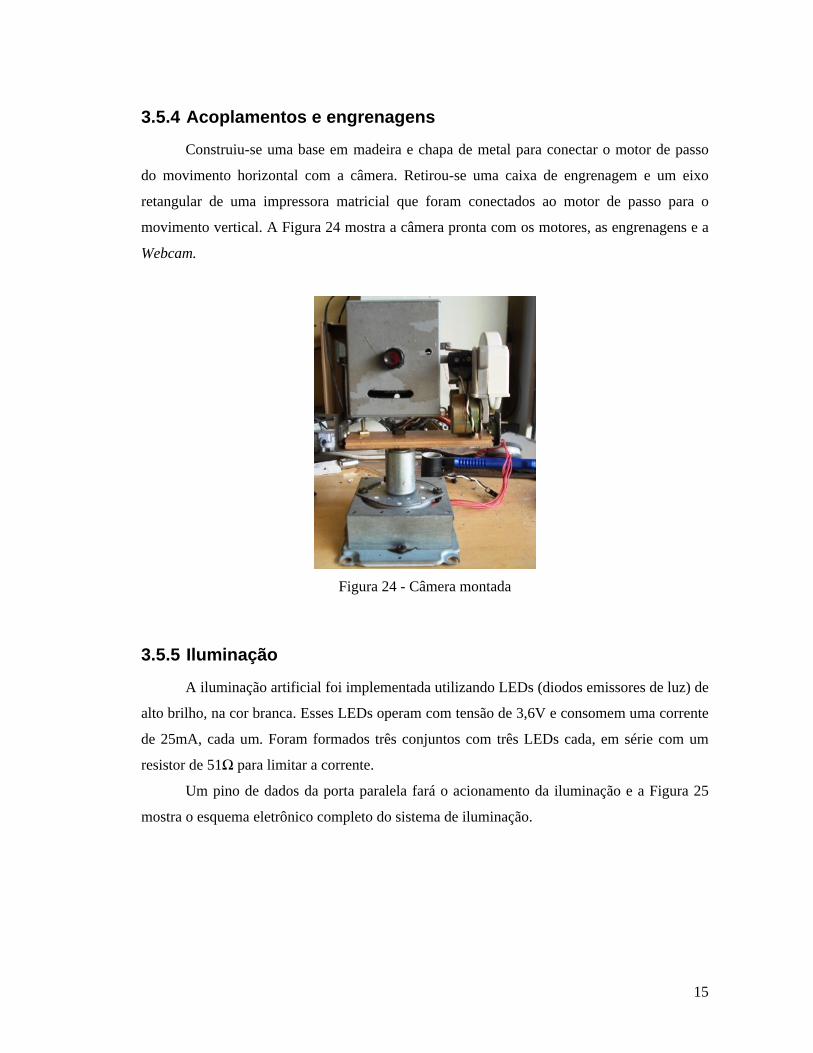
3.5.4 Acoplamentos e engrenagens
Construiu-se uma base em madeira e chapa de metal para conectar o motor de passo
do movimento horizontal com a câmera. Retirou-se uma caixa de engrenagem e um eixo
retangular de uma impressora matricial que foram conectados ao motor de passo para o
movimento vertical. A Figura 24 mostra a câmera pronta com os motores, as engrenagens e a
Webcam.
Figura 24 - Câmera montada
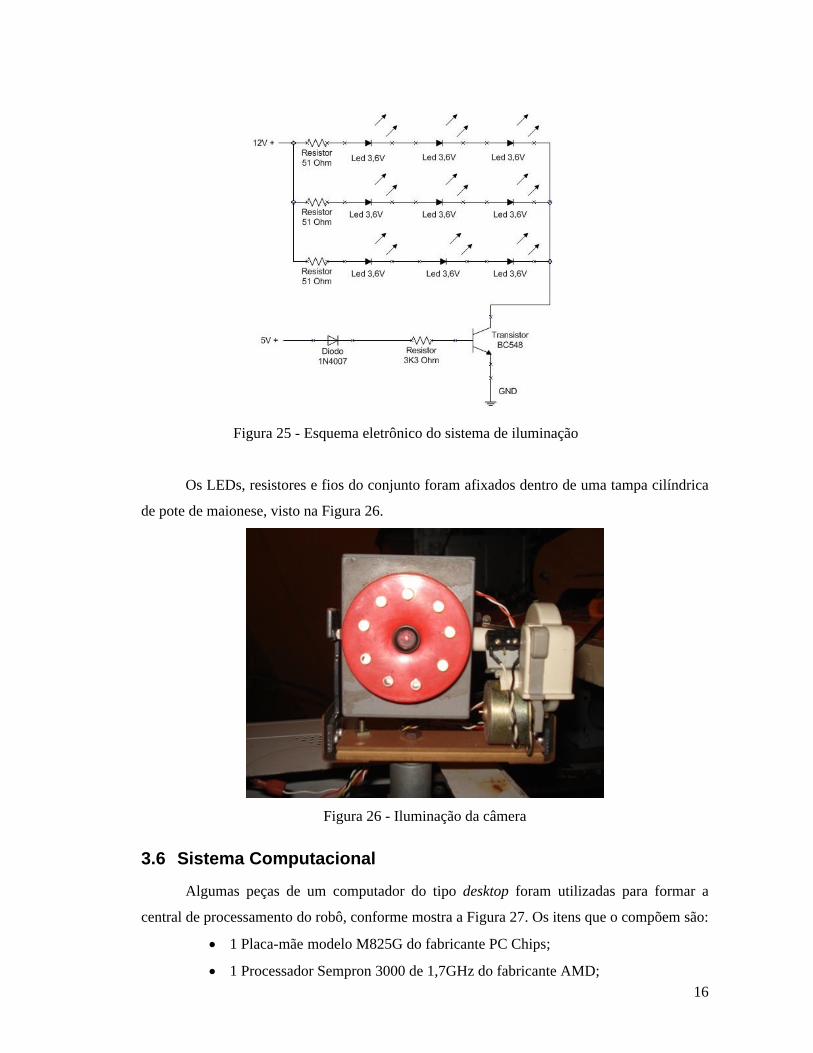
3.5.5 Iluminação
A iluminação artificial foi implementada utilizando LEDs (diodos emissores de luz) de
alto brilho, na cor branca. Esses LEDs operam com tensão de 3,6V e consomem uma corrente
de 25mA, cada um. Foram formados três conjuntos com três LEDs cada, em série com um
resistor de 51 para limitar a corrente.
Um pino de dados da porta paralela fará o acionamento da iluminação e a Figura 25
mostra o esquema eletrônico completo do sistema de iluminação.
16
Figura 25 - Esquema eletrônico do sistema de iluminação
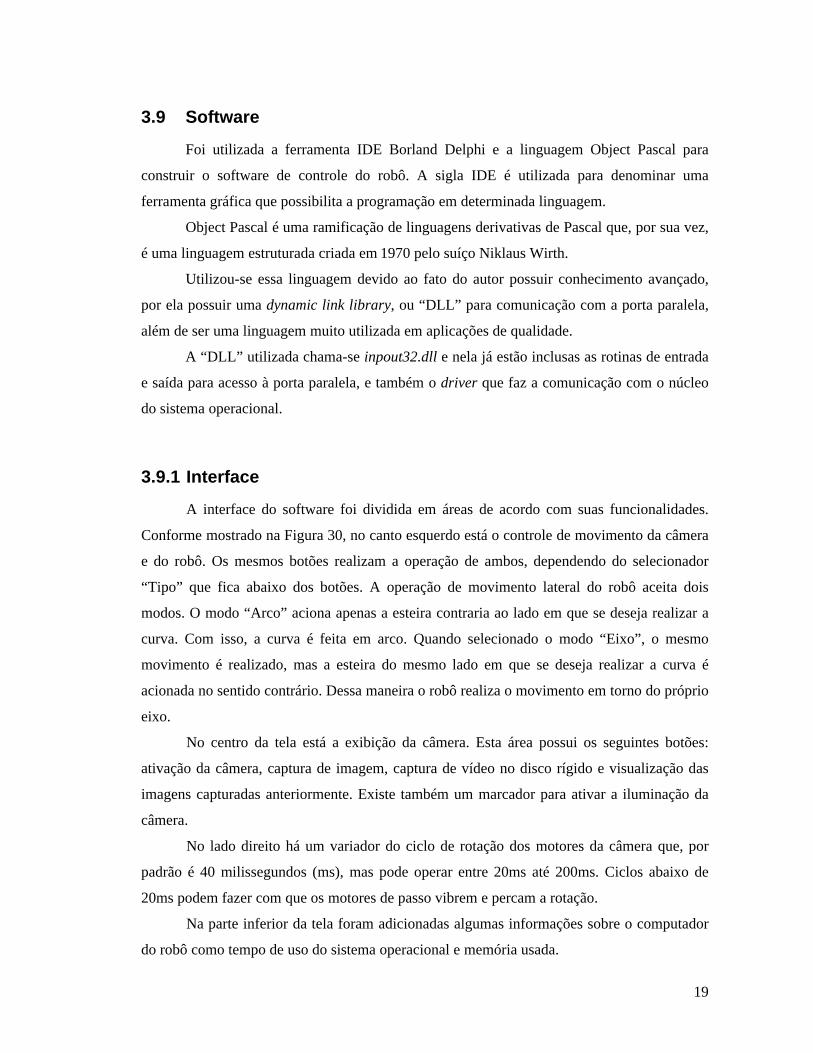
Os LEDs, resistores e fios do conjunto foram afixados dentro de uma tampa cilíndrica
de pote de maionese, visto na Figura 26.
Figura 26 - Iluminação da câmera
3.6 Sistema Computacional
Algumas peças de um computador do tipo desktop foram utilizadas para formar a
central de processamento do robô, conforme mostra a Figura 27. Os itens que o compõem são:
1 Placa-mãe modelo M825G do fabricante PC Chips;
1 Processador Sempron 3000 de 1,7GHz do fabricante AMD;

17
1 Pente de memória DDR 266MHz com capacidade de 256MB;
1 Disco rígido de 40GB do fabricante Maxtor;
1 Fonte de alimentação de 300W modelo LC-B500E do fabricante Mtek;
2 Placas PCI com saída porta paralela
Figura 27 - Sistema Computacional dentro do robô
3.7 Alimentação do sistema
Foram utilizadas duas baterias recarregáveis (Figura 28), do fabricante PowerMAX,
modelo FP1270S, que operam com tensão de 12V e capacidade de 7Ah cada. As baterias
foram fixadas no interior do robô e conectadas a uma placa de No-break, cedido formalmente
pela Universidade São Francisco. São função é alimentar o sistema computacional, os
motores de passo e iluminação da câmera, os motores de tração e as placas drive dos motores.
Figura 28 - Bateria

18
3.8 Conexão Wireless
Utilizou-se conexão de rede wireless do tipo Ad-hoc entre o controlador remoto e o
robô. A Figura 29 mostra a configuração da conexão no robô e no controlador remoto.
Figura 29 - Configuração de rede
O computador utilizado no robô não possui placa de rede sem fio dedicada. Por isso
foi instalada uma placa wireless USB modelo F5D7050TT do fabricante Belkin. Ela
possibilita conexões no modo 802.11/g, com velocidade de até 54Mbps. Seu alcance, sem
barreiras como paredes, pode chegar a até cinqüenta metros.
3.8.1 Controle remoto
Foi utilizado um software para realizar o controle remoto do robô denominado Ultra-
VNC. O aplicativo Ultra-VNC servidor foi instalado no robô e aplicativo Ultra-VNC cliente é
instalado na máquina do controlador.
O software cliente efetua a conexão através do endereço IP do servidor e uma senha
pré-definida. A partir do acesso, o cliente executa todas as funções do servidor remotamente.
19
3.9 Software
Foi utilizada a ferramenta IDE Borland Delphi e a linguagem Object Pascal para
construir o software de controle do robô. A sigla IDE é utilizada para denominar uma
ferramenta gráfica que possibilita a programação em determinada linguagem.
Object Pascal é uma ramificação de linguagens derivativas de Pascal que, por sua vez,
é uma linguagem estruturada criada em 1970 pelo suíço Niklaus Wirth.
Utilizou-se essa linguagem devido ao fato do autor possuir conhecimento avançado,
por ela possuir uma dynamic link library, ou “DLL” para comunicação com a porta paralela,
além de ser uma linguagem muito utilizada em aplicações de qualidade.
A “DLL” utilizada chama-se inpout32.dll e nela já estão inclusas as rotinas de entrada
e saída para acesso à porta paralela, e também o driver que faz a comunicação com o núcleo
do sistema operacional.
3.9.1 Interface
A interface do software foi dividida em áreas de acordo com suas funcionalidades.
Conforme mostrado na Figura 30, no canto esquerdo está o controle de movimento da câmera
e do robô. Os mesmos botões realizam a operação de ambos, dependendo do selecionador
“Tipo” que fica abaixo dos botões. A operação de movimento lateral do robô aceita dois
modos. O modo “Arco” aciona apenas a esteira contraria ao lado em que se deseja realizar a
curva. Com isso, a curva é feita em arco. Quando selecionado o modo “Eixo”, o mesmo
movimento é realizado, mas a esteira do mesmo lado em que se deseja realizar a curva é
acionada no sentido contrário. Dessa maneira o robô realiza o movimento em torno do próprio
eixo.
No centro da tela está a exibição da câmera. Esta área possui os seguintes botões:
ativação da câmera, captura de imagem, captura de vídeo no disco rígido e visualização das
imagens capturadas anteriormente. Existe também um marcador para ativar a iluminação da
câmera.
No lado direito há um variador do ciclo de rotação dos motores da câmera que, por
padrão é 40 milissegundos (ms), mas pode operar entre 20ms até 200ms. Ciclos abaixo de
20ms podem fazer com que os motores de passo vibrem e percam a rotação.
Na parte inferior da tela foram adicionadas algumas informações sobre o computador
do robô como tempo de uso do sistema operacional e memória usada.

20
Figura 30 - Interface do software de controle
3.9.2 Lógica de controle
O software foi desenvolvido para identificar o acionamento de determinadas teclas no
teclado e executar as tarefas correspondentes. Conforme visto na Figura 31, as teclas “w”, “s”,
“a” e “d” foram definidas para o acionamento do movimento do robô para frente, trás,
esquerda e direita, respectivamente. O movimento da câmera foi vinculado às teclas “i”, “k”,
“j” e “l” para os movimentos cima, baixo, esquerda e direita, respectivamente.
Figura 31 - Controle do robô Figura 32 - Controle da câmera
21
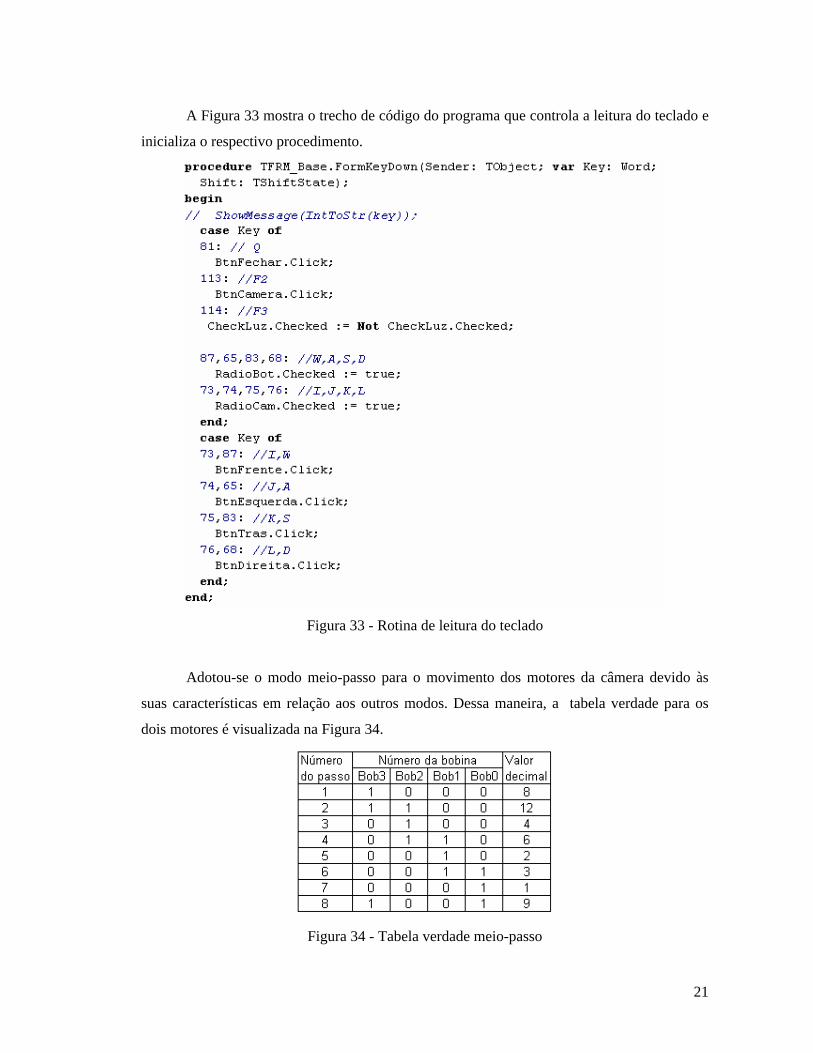
A Figura 33 mostra o trecho de código do programa que controla a leitura do teclado e
inicializa o respectivo procedimento.
Figura 33 - Rotina de leitura do teclado
Adotou-se o modo meio-passo para o movimento dos motores da câmera devido às
suas características em relação aos outros modos. Dessa maneira, a tabela verdade para os
dois motores é visualizada na Figura 34.
Figura 34 - Tabela verdade meio-passo

22
A Figura 35 mostra o trecho do código do software responsável pela lógica de controle
dos motores da câmera, de acordo com a tabela verdade.
Figura 35 - Lógica de controle dos motores da câmera
Na inicialização do software é criada uma matriz com dimensão 4 x 8 que recebe os
valores dessa tabela verdade. Um vetor de duas posições, também criado na inicialização,
controla o índice dos motores da câmera. A posição 0 é o índice do motor horizontal e a
posição 1 o índice do motor vertical. Os 4 bits menos significativos são responsáveis pelo
controle do movimento vertical e os 4 mais significativos pelo controle do movimento
horizontal.
No momento do acionamento da tecla referente ao movimento, ocorre a variação de
incremento ou decremento do índice. Depois, soma-se os 4 bits do passo que o índice aponta
naquele instante para os dois motores, gerando um byte e em seguida esse byte é enviado à
23
porta paralela através da função “outportb”. Essa função tem como parâmetro o endereço da
porta paralela (378H ou 278H) e o byte de instrução.
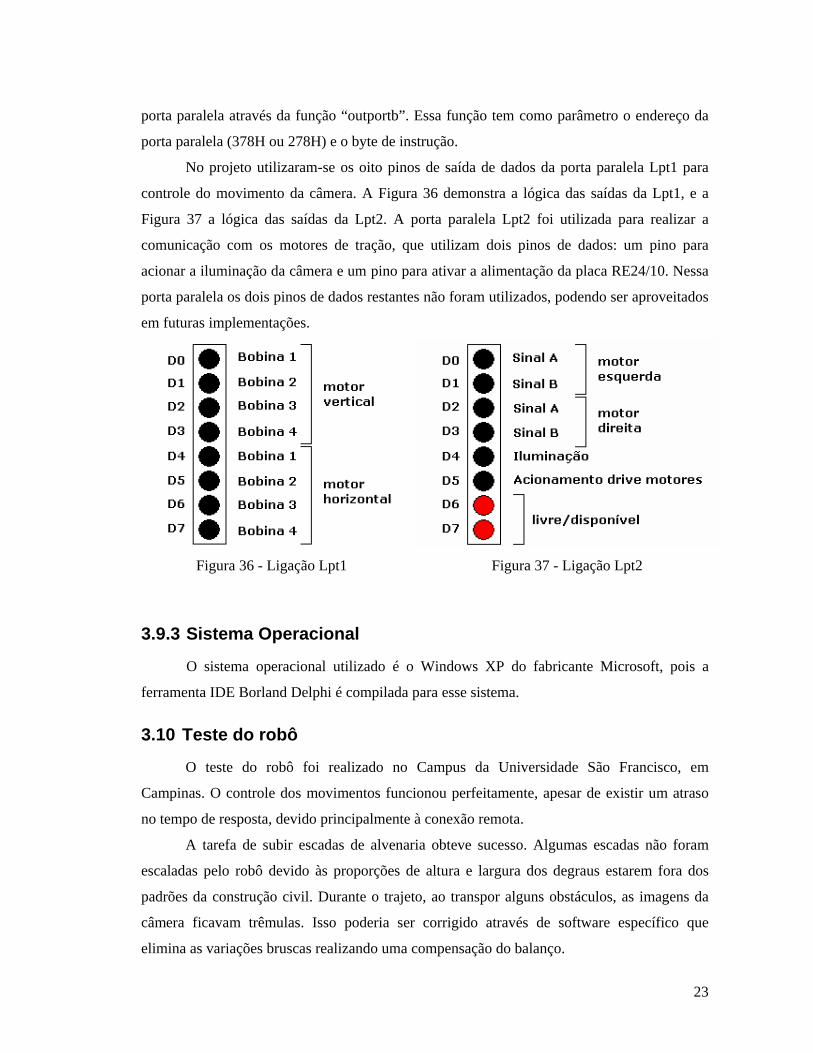
No projeto utilizaram-se os oito pinos de saída de dados da porta paralela Lpt1 para
controle do movimento da câmera. A Figura 36 demonstra a lógica das saídas da Lpt1, e a
Figura 37 a lógica das saídas da Lpt2. A porta paralela Lpt2 foi utilizada para realizar a
comunicação com os motores de tração, que utilizam dois pinos de dados: um pino para
acionar a iluminação da câmera e um pino para ativar a alimentação da placa RE24/10. Nessa
porta paralela os dois pinos de dados restantes não foram utilizados, podendo ser aproveitados
em futuras implementações.
Figura 36 - Ligação Lpt1 Figura 37 - Ligação Lpt2
3.9.3 Sistema Operacional
O sistema operacional utilizado é o Windows XP do fabricante Microsoft, pois a
ferramenta IDE Borland Delphi é compilada para esse sistema.
3.10 Teste do robô
O teste do robô foi realizado no Campus da Universidade São Francisco, em
Campinas. O controle dos movimentos funcionou perfeitamente, apesar de existir um atraso
no tempo de resposta, devido principalmente à conexão remota.
A tarefa de subir escadas de alvenaria obteve sucesso. Algumas escadas não foram
escaladas pelo robô devido às proporções de altura e largura dos degraus estarem fora dos
padrões da construção civil. Durante o trajeto, ao transpor alguns obstáculos, as imagens da
câmera ficavam trêmulas. Isso poderia ser corrigido através de software específico que
elimina as variações bruscas realizando uma compensação do balanço.

24
A esteira de tração apresentou algumas dificuldades operacionais, pois em
determinados momentos apresentavam folgas e escapavam.
25
4 CONCLUSÃO
Quando se projeta um robô, todas as peças têm suas dimensões calculadas levando-se
em consideração o objetivo do robô e suas necessidades como velocidade, peso, capacidade
de tração, resistência à temperatura, entre outros fatores. Até simuladores são usados antes do
início da construção, para garantir o sucesso do projeto.
A construção de um robô a partir de peças usadas, retiradas de outros equipamentos,
não é uma tarefa fácil, devido, principalmente, à inexistência de um projeto completo antes de
iniciar a construção. O projeto do qual este documento relata, não foi completo e detalhado,
no início. Contudo, durante a construção, a criatividade foi fundamental para que peças
retiradas de outros equipamentos fossem aproveitadas e formassem o robô. Ao final, nota-se
que o projeto está completo.
A conclusão é de que a diversidade de robôs seja gigante ou nanométrico, terrestre ou
aquático, militar ou para serviços domésticos, é infinita. E dependem muito da criatividade de
quem os projeta, desde que tal criatividade esteja alinhada com um excelente conhecimento
teórico e vasta experiência prática.
4.1 Contribuições
O trabalho contribuiu para a prática no desenvolvimento de um protótipo, bem como
das solução de dificuldades encontradas no decorrer do cronograma. Reformulações e
correções foram necessárias e a criatividade foi fundamental para que o projeto tivesse êxito.
4.2 Trabalhos futuros
Este trabalho possibilita a extensão de diversos trabalhos como:
Criação de braço mecânico;
Criação de software inteligente para controle autônomo juntamente com a
instalação de sensores ao redor do robô;
Criação de software de captura de imagens da câmera para identificação de
objetos e possível movimento do robô para segui-lo;
26
Criação de software de controle por voz para acionar o movimento do robô e
da câmera.

27
Referências Bibliográficas
Tanenbaum, Andrews. Redes de Computadores, 2003.
Nehmzow, Ulrich. Mobile Robotics: A Pratical Introduction. Springer, 2000.
Dudek, Gregory and Jenkin, Michael. Computational Principles of Mobile Robotics. Cambridge University Press, 2000.
Pieri, Edson Roberto de. Curso de Robótica Móvel. UFSC. 2002.
<http://www.rogercom.com./>. Acesso em: 21 nov. 2008.
<http://www.roboticasimples.com./>. Acesso em: 21 nov. 2008.
<http://www.mecatronicaatual.com.br./>. Acesso em: 21 nov. 2008.
<http://www.tesequipamentos.com.br/>. Acesso em: 21 nov. 2008.
<http://www.fei.edu.br/>. Acesso em: 16 out. 2008.

This document was created with Win2PDF available at http://www.win2pdf.com.The unregistered version of Win2PDF is for evaluation or non-commercial use only.This page will not be added after purchasing Win2PDF.





























