Embed Size (px)
Citation preview

Curso de Instrumentista de
Sistemas
Fundamentos de Controle
Prof. Msc. Jean Carlos

Fundamentos de Controle
Aula_05

Na última aula...
Método da tentativa sistemática
• ganho do controlador no valor mínimo ou a banda proporcional no valor máximo.
• Aumentar o ganho ou diminuir a banda proporcional, até obter a estabilidade

Ajuste integral

Ajuste derivativo

Método da sensibilidade limite
Desenvolvido por Ziegler e Nichols.
Permite o cálculo dos três ajustes a partir dos dados obtidos em um teste simples das características da malha de controle.
Com os ajustes I e D no seu valor mínimo de atuação, a faixa proporcional (Pbu) é diminuída ou o ganho é aumentado enquanto se cria pequena mudança no set-point.
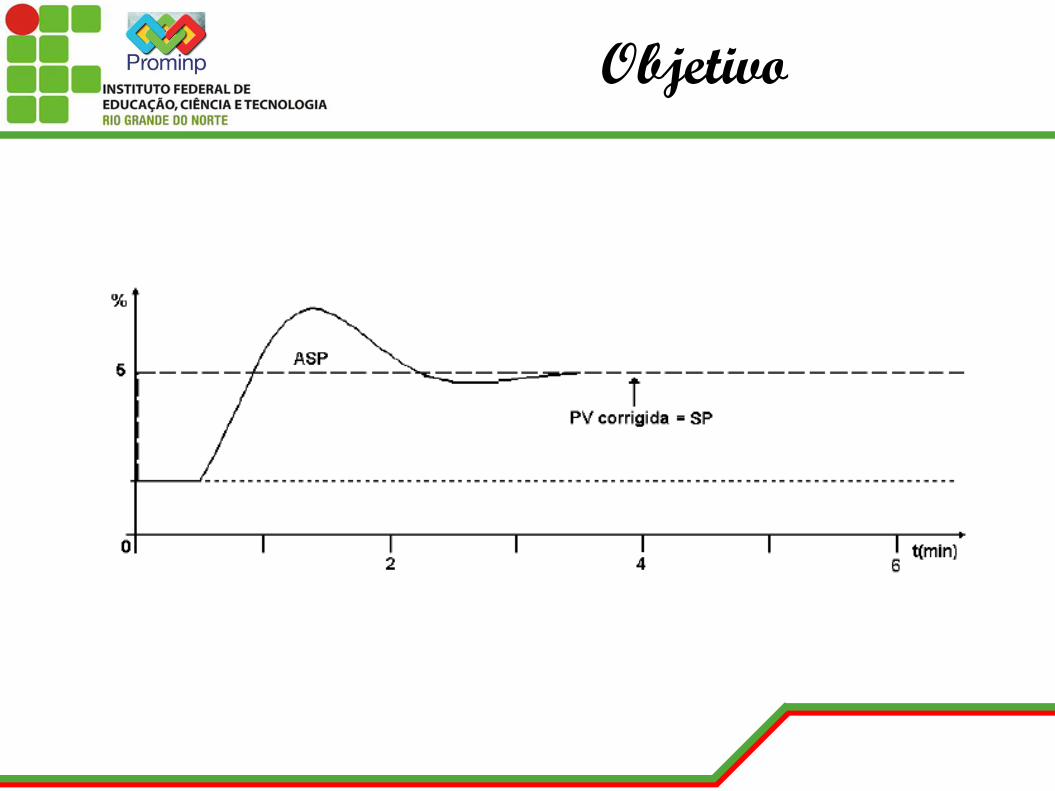
Objetivo

Método da curva de reação
• passar o controlador para manual e criar uma mudança pequena e repentina na entrada do processo
• A partir da forma da curva de reação resultante são obtidas duas características deste processo
• velocidade de reação R e o atraso de tempo L.
• Traça-se a tangente à curva no ponto de inflexão (mudança de sentido do traçado) como ilustrado, sendo R a inclinação desta tangente.

Método da curva de reação
L, é o tempo em minutos entre a mudança em degrau e o ponto onde a tangente cruza o valor inicial da variável controlada.

Método da curva de reação

Auto-sintonia
Hoje em dia os controladores mais modernos (microprocessados) possuem auto-sintonia para as ações de controle, ou seja, conseguem calcular automaticamente o ganho, a derivativa e a integral.
Estes ajustes são calculados baseados na curva de reação do processo, provocado por um distúrbio em forma de degrau normalmente provocado pelo set-point.

Auto-sintonia
Geralmente os controladores que possuem a autosintonia, possuem alarmes para que no instante em que estão sendo calculadas as ações, se houver alguma anormalidade no processo, o mesmo não seja prejudicado, caso isto ocorra à auto-sintonia é desligada automaticamente.

Autosintonia
A auto-sintonia é mais precisa quando aplicada próxima a ponto de trabalho ou operação do processo. Não adianta fazer sintonia em 9000C se a temperatura de trabalho é de 13000C, pois a dinâmica do processo é diferente.

MÉTODOS DE SINTONIA DE MALHAS
Os principais métodos utilizados para sintonia de malhas de controle do tipo feedback são:

MÉTODO DE APROXIMAÇÕES SUCESSIVAS OU TENTATIVA E
ERRO
Consiste em modificar as ações de controle e observar os efeitos na variável de processo.
A modificação das ações continua até a obtenção de uma resposta ótima.
Em função da sua simplicidade é um dos métodos mais utilizados.
É necessário um conhecimento profundo do processo e do algoritmo do controlador.

MÉTODO DE APROXIMAÇÕES SUCESSIVAS OU TENTATIVA E ERRO
1) Eliminar a ação integral ( 1 = ∞ ) e a ação derivada (d = 0 ).
2) Coloque k num valor baixo ( ex: kc = 0,5 ) e coloque o controlador em automático.
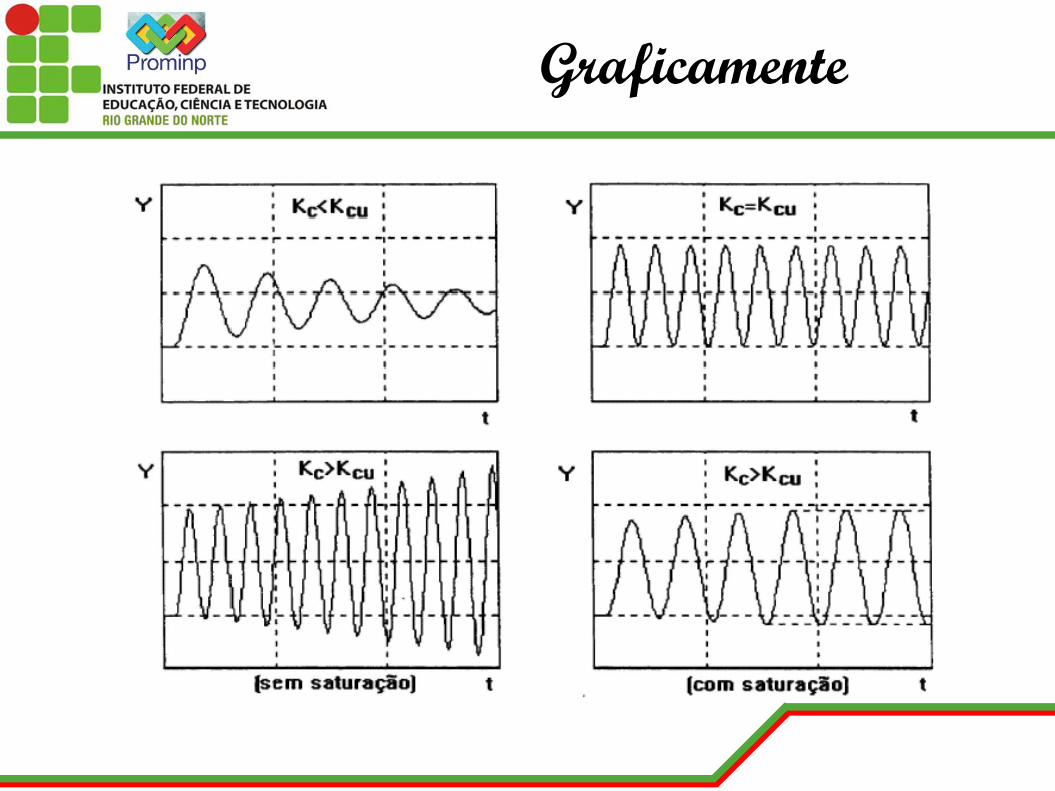
3) Aumente o kc aos poucos até o processo ciclar continuamente nos casos de servos e regulador.
4) Reduza kc a metade
5) Diminua 1 aos poucos até processo ciclar continuamente nos casos servos e regulador. Ajuste 1 para 3 vezes o valor.

MÉTODO DE APROXIMAÇÕES SUCESSIVAS OU TENTATIVA E ERRO
6) Aumente 1 aos poucos até o processo ciclar continuamente nos casos servos e regulador. Ajuste 1 para 1/3 do valor .
O valor de kc quando o processo cicla continuamente é chamado de último ganho (ultimate gain) sendo representado por kcu .
Durante o teste é importante que a saída do controlador não sature.
Graficamente

Desvantagens
a) Utiliza muito tempo, se o número de tentativas para otimizar kc , 1 e d for muito grande ou se a dinâmica do processo for muito lenta.O teste pode ser muito caro devido à baixa produtividade ou qualidade ruim do produto durante o mesmo.

Desvantagens
b) A ciclagem contínua pode ser dificultada, pois está no limite de estabilidade e qualquer perturbação ou alteração no processo pode ocorrer durante a sintonia e causar operação instável ou perigosa. (ex: disparar a temperatura de um reator químico)

Desvantagens
c) Este procedimento de sintonia não é aplicável a processos em malha aberta pois estes processos são instáveis tanto com valores baixos kc como valores altos de kc, mas são estáveis em valores intermediários de kc.
d) Alguns processo simples não tem kcu ( ex: processos de 1ª e 2 ª ordem sem tempo morto).
Regras que podem ser úteis
1) Partindo de um pré-sintonia, o ajuste do ganho não deve ser superior a 20% do valor inicial, o ideal seria entre 5 a 10%.
2) Reduza o ganho nos seguintes casos:
- A variável controlada tende a ciclar
- Há um grande overshot na variável manipulada.
- A variável controlada está movendo em torno do set-point.
Regras que podem ser úteis
3) A ação integral pode ser ajustada por um fator de dois inicialmente e então reduzida até que a sintonia se torne satisfatória.
A ação integral deve ser aumentada se a variável controlada estiver lenta na sua aproximação do set-point.

Regras que podem ser úteis
Uma alteração grande na ação integral deve ser acompanhada de uma alteração no ganho do controlador, isto é, diminua o ganho levemente se o tempo integral é reduzido e vice-versa se for aumentado.

Regras que podem ser úteis
4) A ação derivativa deve ser evitada. Se a ação derivativa for necessária, então devem ser compensados com o tempo proporcional e integral quando alterada a ação derivativa, isto é feito de forma semelhante ao ajuste da integral.
Note que a razão entre o tempo derivativo e o tempo integral deve ser menor que 0,5.
MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO
O conhecimento dos parâmetros do processo e da estruturação do controlador permite o cálculo de ações de controle. Este método necessita de um registrador contínuo e rápido. É utilizado, de preferência em processos de grande inércia.
MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO
A identificação de um processo permite a obtenção dos seus principais parâmetros ( ganho,constante de tempo, etc.). A partir desses parâmetros, podemos calcular as ações a serem fixadas no controlador que dependem basicamente de:
- Do modelo escolhido para a identificação;
- Da estrutura do controlador utilizado;
Do modo de regulação escolhido (P, PI, PID)

MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO
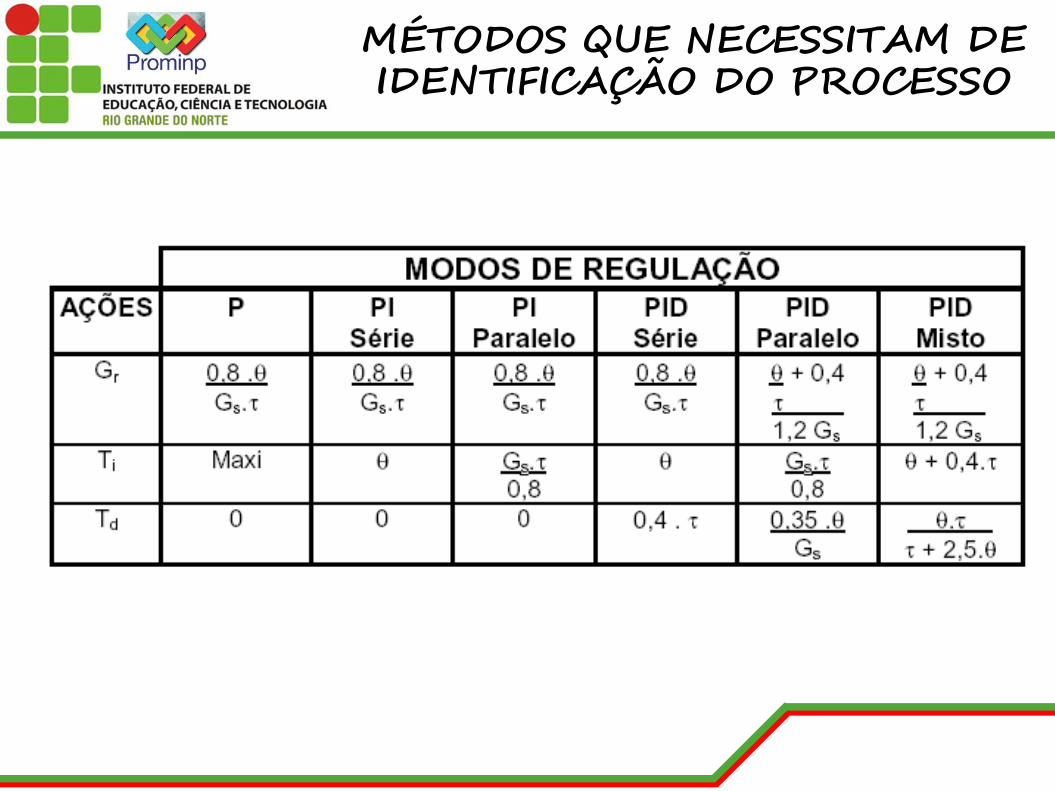
Para Processos Estáveis
Após a identificação do processo segundo o modelo de primeira ordem, utilizar a tabela seguinte para calcular as ações a serem afixadas no controlador. As fórmulas da tabela seguinte permitem obter respostas biamortecidas.

MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO
Após os cálculos e fixação das ações , no controlador, é necessário efetuar um teste de resposta do sistema (mudanças no set-point). Se os resultados obtidos não forem satisfatórios, refazer a identificação, confirmar a estrutura do controlador e recalcular as ações.
MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO

Exemplo
A resposta de um sistema em malha aberta é mostrada na figura abaixo.
Gp = 0,84; θ = 26s; τ = 14s
Cálculo das ações para um controlador com estrutura em série. A relação θ/ = 1,85, indica que o modo apropriado é um PID

Continuação do exemplo
Usando o PID série
Da tabela Kp ≤ 0,85 . 1/Gp . θ/ = 1,75
Ti ≥ θ = 26 s
Td = 0,4. = 6 s
MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO
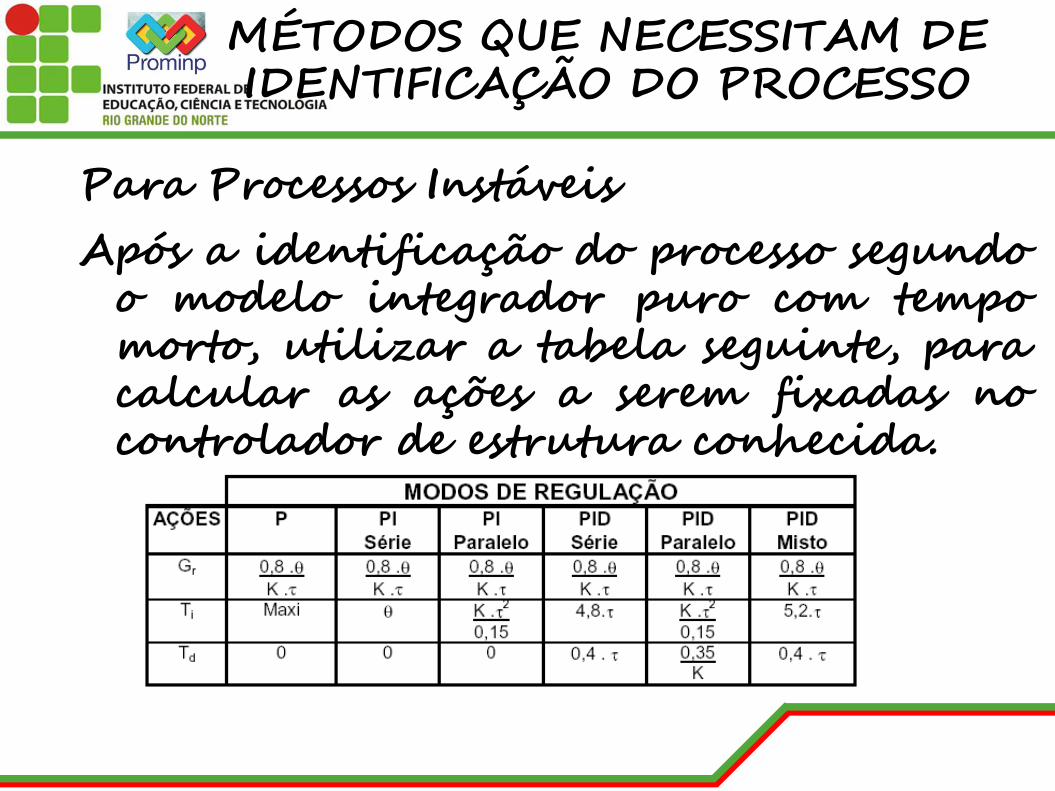
Para Processos Instáveis
Após a identificação do processo segundo o modelo integrador puro com tempo morto, utilizar a tabela seguinte, para calcular as ações a serem fixadas no controlador de estrutura conhecida.

MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO
PROCESSO
A escolha do modo de regulação está ligada à controlabilidade do sistema que é determinada pelo produto K . .

MÉTODOS QUE NECESSITAM DE IDENTIFICAÇÃO DO PROCESSO
Após os cálculos e fixação das ações, no controlador, é necessário efetuar um teste de resposta do sistema (mudanças no set-point). Se os resultados obtidos não forem satisfatórios, refazer a identificação, confirmar a estrutura do controlador e recalcular as ações.

Exemplo:
1) Identificação do Sistema. A resposta de um sistema em malha aberta é representado na figura.
Da identificação obtém-se os seguintes parâmetros:
T = 0,36 min e k = 1,4 min-1
2) Cálculo das ações de um controlador série

Continuação do exemplo

MÉTODO DE ZIEGLER E NICHOLS EM MALHA FECHADA
Este método baseia-se na observação da resposta do processo e do conhecimento da estrutura do controlador. É um dos métodos que permite o cálculo das ações de controle sem a necessidade dos parâmetros do processo.
Este método é indicado para processos estáveis e instáveis, mas não se adapta muito bem em malhas rápidas (vazão por exemplo) e nos processos com tempo morto alto.
MÉTODO DE ZIEGLER E NICHOLS EM MALHA FECHADA
O método consiste em colocar a malha de controle em oscilação(se o sinal de saída não apresentar oscilações, quaisquer que sejam os valores de Kp, então o método não se aplica).

MÉTODO DE ZIEGLER E NICHOLS EM MALHA FECHADA
O período das oscilações e ganho crítico do controlador GCR que ocasiona oscilações, permitem os cálculos das ações a serem fixadas no controlador. O cálculo depende da estrutura do controlador utilizado e do modo de regulação escolhido ( P, PI e PID).
MÉTODO DE ZIEGLER E NICHOLS EM MALHA FECHADA
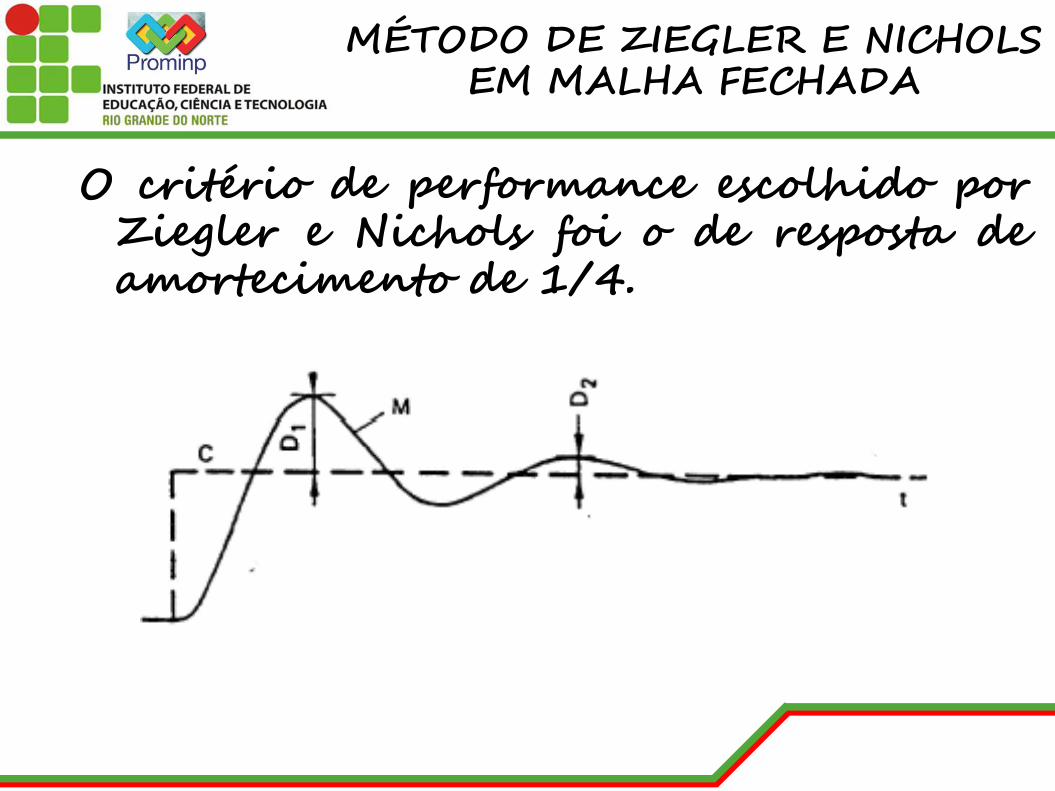
O critério de performance escolhido por Ziegler e Nichols foi o de resposta de amortecimento de 1/4.

Procedimento
a) Determinação de GCR e T
Controlador em manual, estabilizar o processo em torno do PO.
- Fixar o controlador Td = 0 e Ti = máximo -> proporcional puro.
- Fixar ganho proporcional Kp = 1 ou BP = 100%
- Colocar set-point igual ao valor da variável do processo (PV) e passar o controlador para automático.

Procedimento continuação
- Efetuar um degrau no setpoint SP de duração limitada. O valor de SP deverá ser escolhido do modo que a amplitude de oscilação não exceda a 10%. Durante o teste é importante que a saída do controlador não sature.
-

Procedimento continuação
Observar o sinal da variável do processo ( PV ) ou da variável manipulada ( MV ).
Se a variação de PV estiver amortecida, como na figura seguinte, aumentar o ganho proporcional Kp ( diminuir BP%) e refazer a excitação.

Procedimento continuação
Se a oscilação de PV for divergente, como na figura abaixo, diminuir o ganho proporcional (aumentar BP%).
O teste termina quando se obtém uma oscilação contínua da variável do processo como mostrado na figura seguinte

Procedimento continuação
Anotar o ganho do controlador que ocasionou a oscilação continua ( GCR )
- Diminuir o ganho proporcional para estabilizar a variável controlada ( PV )
- Medir o período T;

Procedimento continuação
Cálculo das ações do controlador Obtido os parâmetros T e GCR , usar a tabela seguinte para calcular as ações a serem fixadas no controlador.

EXEMPLO:
A figura abaixo mostra o sinal da válvula para um ganho crítico do controlador = 4 (GCR = 4)
Da figura obtém-se T = 56 s
Se escolhermos um PID com estrutura série e fazendo uso da tabela 6.12, obtemos:
Kp = 4/3,3 = 1,2
Ti = 0,25 . 56 = 14 s
Td = 0,25 . 56 = 14 s

Exemplo
Fixando os valores calculados no controlador e aplicando um degrau no SP, obtém-se como resultado abaixo;

MÉTODOS DE AUTO-SINTONIA
1) O sistema é excitado por um relé que causa oscilações no sistema com pequena amplitude. A amplitude pode ser restrita pelo ajuste da amplitude da entrada.
2) Normalmente um experimento em malha fechada é suficiente para encontrar o modelo dinâmico, e o experimento não requer alguma informação prévia do modelo.O auto-sintonizador usa um relé com uma zona morta que gera a oscilação do processo:

MÉTODOS DE AUTO-SINTONIA
MÉTODOS DE AUTO-SINTONIA
O último ganho ( Kcu ) é calculado por:
Onde:
d = Amplitude do relé
a = Amplitude da oscilação do processo
O último período ( Pu ) é encontrado medindo o período de oscilação do processo.
A partir de Kcu e Pu obtém-se os parâmetros do controlador utilizando o critério de Ziegler-Nichols.

CONTROLE EM CASCATA
O controle em cascata é implementado quando a malha de controle simples já não responde satisfatoriamente, principalmente em processos de grande inércia e quando o processo possui uma contínua perturbação na variável regulante.
No controle em cascata normalmente encontra-se duas variáveis de processo, dois controladores e um elemento final de controle.

Estrutura Interna dos Controlador

Estrutura Interna dos Controladores
Controlador Proporcional
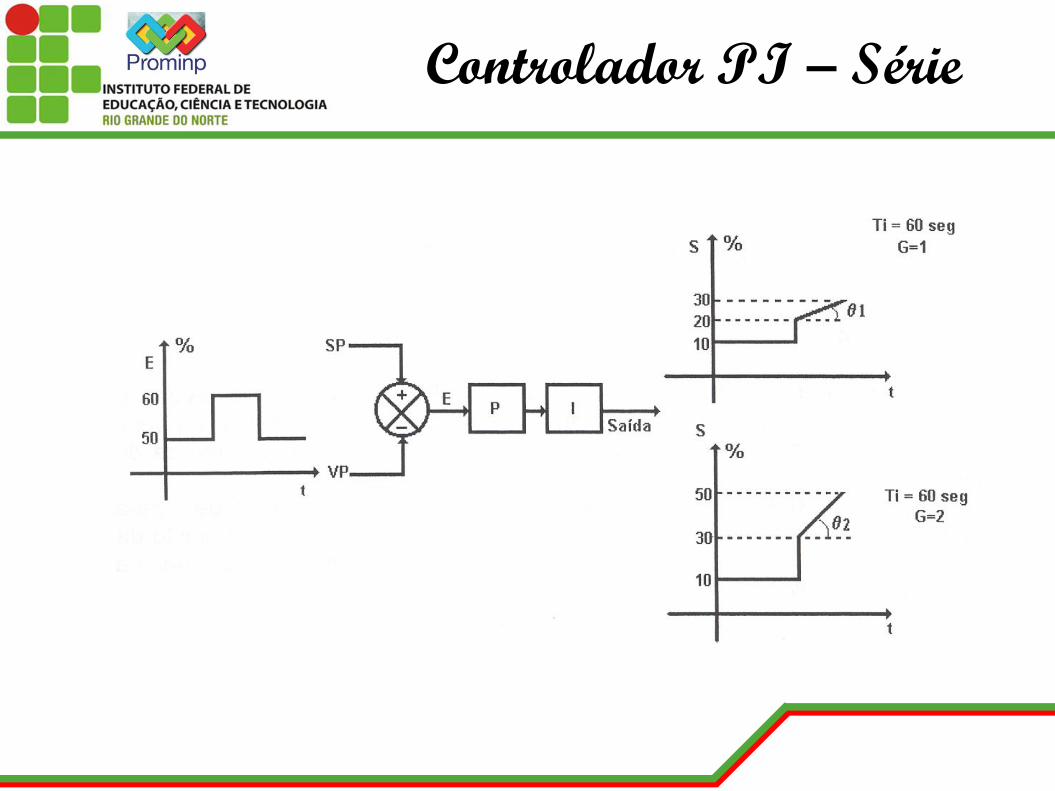
Controlador PI – Série

Controlador PI – Paralelo
quando alteramos o ganho do controlador não alteramos a correção da ação integral
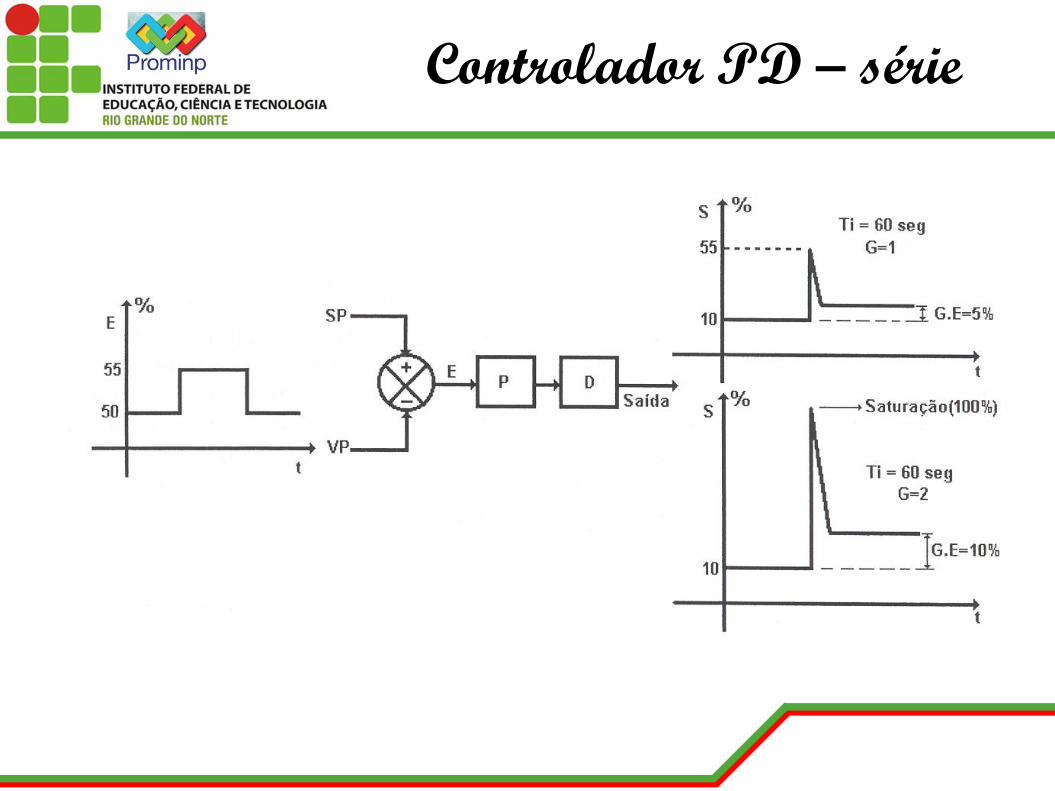
Controlador PD – série

Controlador PD – Paralelo
se alterarmos o ganho do controlador não iremos alterar a amplitude de correção da ação derivativa

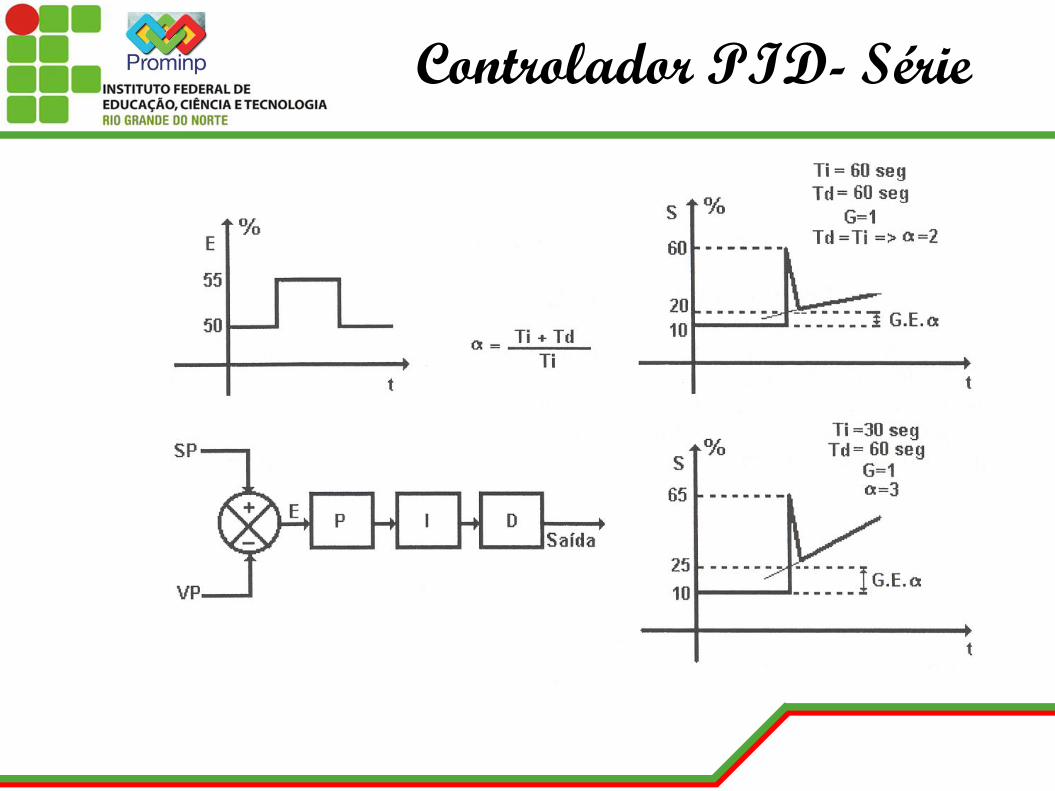
Controlador PID- Série
Neste tipo de controlador, quando alteramos o ganho estaremos alterando a entrada dos blocos da ação integral e derivativa, ou seja, para todas mudanças de ganho estaremos alterando as correções das ações integral e derivativa, portanto, devido a este tipo de estrutura existe também uma interação entre ações integrais e derivativas.

Controlador PID- Série
Esta interação chamamos de fator é sempre igual a 2. Note, que neste tipo de controlador a derivativa está atuando em função do erro, ou seja, para qualquer desvio no set-point ou na variável do processo ele fará a correção.
Controlador PID- Série

Controlador PID- Série - Derivativa na VP
Neste tipo de controlador existem três diferenças com relação ao anterior.
A primeira é que a derivada atua na variável do processo e não no erro, a segunda é que com a mudança de ganho alteramos apenas a entrada do bloco da ação integral e a terceira é que a saída do bloco da ação derivativa é a entrada do bloco da ação proporcional o que significa dizer que quando alteramos a ação derivativa alteramos a correção da ação proporcional.

Controlador PID- Série - Derivativa na VP
Note que para uma alteração no set-point atuará somente as ações proporcional e integral mas quando houver alteração na VP as três ações atuarão. Também é importante salientar que neste tipo de controlador existe o fator .

Controlador PID- Série - Derivativa na VP
CONTROLADOR PID - PARALELO
Controlador PID - Paralelo - Derivativa no Erro.
Neste tipo de controlador as ações de controle atuam totalmente independentes, não havendo interação entre elas. Tanto é que neste caso não existe o fator . É bom salientar que o sinal de entrada dos blocos é sempre o sinal de erro.

CONTROLADOR PID - PARALELO

Controlador PID - Paralelo - Derivativa na VP
Neste tipo de controlador as ações de controle também atuam independentes umas das outras. A diferença deste tipo para o anterior é que a ação derivativa atua somente quando acontece um desvio na variável do processo. Quando se atua no set-point somente as ações proporcional e integral fazem a correção.

Controlador PID - Paralelo - Derivativa na VP

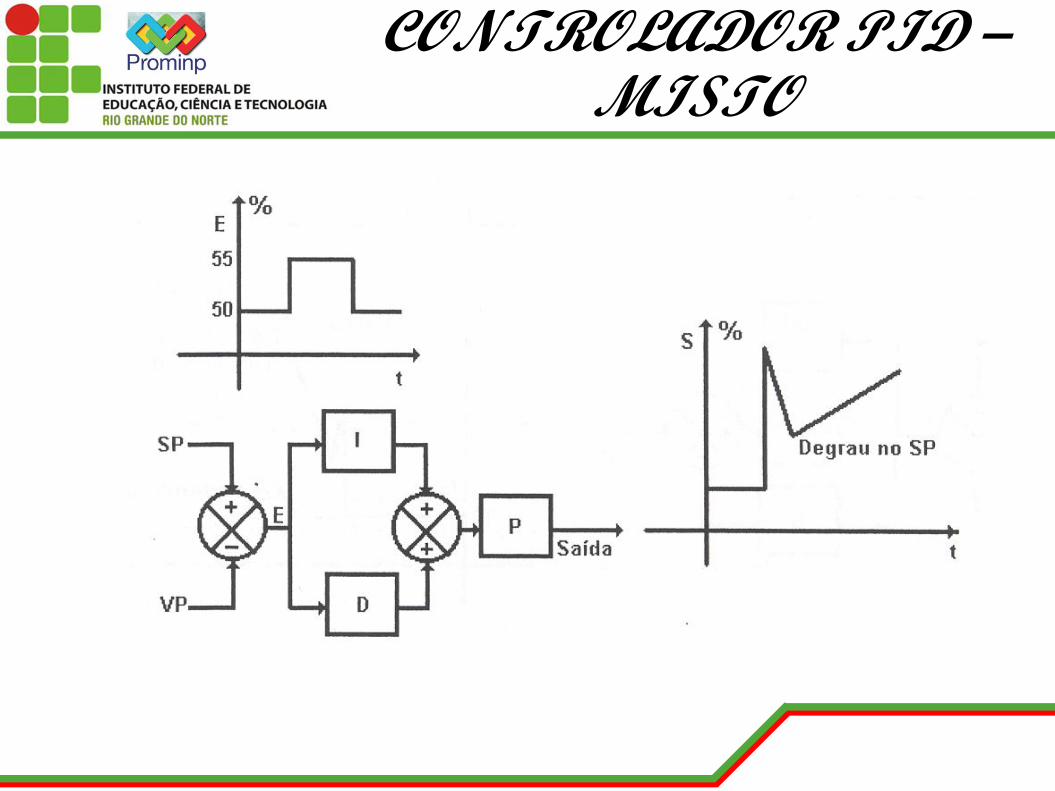
CONTROLADOR PID – MISTO
Controlador PID - Misto - Derivativa no Erro
Neste tipo de controlador os blocos das ações integral e derivativa estão em série com o bloco da ação proporcional e estão em paralelo entre si e por estarem em paralelo entre si não existe o fator . É bom salientar que o sinal de erro é o sinal de entrada dos blocos das ações integral e derivativa.
CONTROLADOR PID – MISTO

Controlador PID - Misto - Derivativa na VP
Este tipo de controlador é semelhante ao anterior com apenas uma diferença que é a variável de processo, atua como sinal de entrada do bloco da ação derivativa, ou seja, quando atuamos no set-point somente as ações integral e proporcional funcionam, já quando há um desvio na variável do processo as três ações funcionam.

Controlador PID - Misto - Derivativa na VP

Exercícios
1) O que um controle tipo Feedback?
2) Quais são os critérios de performance e comportamento das ações PID em malha fechada? Defina-os.
3) O que é um controle em cascata?
4) O que é um controle Feed Foward?
5) O que é um controle Split Range?
6) Quais são os métodos de sintonia de malhas mais utilizados? Defina-os.






















![DokuWiki Syntax Cheat Sheet[Ja] version1.00](https://img.pdfslide.tips/doc/110x75/55aa75ee1a28ab5d0d8b45ee/dokuwiki-syntax-cheat-sheetja-version100.jpg)






