Embed Size (px)
Citation preview

ICTON 2020 We.C3.2
978-1-7281-8422-7/20/$31.00 ©2020 IEEE 1
Figure 1. Autonomous vehicle control by standalone approach.
Cyber-Physical System for Autonomous Driving Vehicle Considering with Social Welfare
Naoaki Yamanaka, Goki Yamamoto, Satoru Okamoto, and Andrea Fumagalli* Department of Information and Computer Science, Faculty of Science and Technology, Keio University,
3-14-1 Hiyoshi, Kohoku-ku, Yokohama, 223–8522, Japan Email: [email protected] * University of Texas at Dallas
ABSTRACT Autonomous driving vehicle control network by edge computer having very short response time has been constructed. Each vehicle has an agent program on the edge and communicated with adjacent vehicle agent in the cyber network. The advantage of connected vehicle control from stand-alone vehicle is sophisticated and total/global optimizing control. The network edge computer calculated “social welfare” which is the best benefit for all vehicle in the society. This paper describes control architecture and method at edge computer. In addition, some experimental results for controlling autonomous vehicle are also described. Keywords: 5G network, edge computing, IoT, autonomous driving, cyber physical, social welfare.
1. INTRODUCTIONAutonomous driving vehicles (ADVs), smart houses, and the Internet of Things (IoT) will use optical access/metro networks to create, store, and process massive amount of data in cloud data centers (DCs). The cloud DC architecture will be changed from a centralized mega-DC cloud to distributed and interconnected small computers called edge computers or micro-DCs [1]. Optical interconnection creates closely connected distributed edge computers [2].
The smart and connected community (S&CC) network proposal uses optical interconnection to objects, humans, and applications to a network that offers sophisticated processing functions [3]. S&CC requires that user application and processing functions be provided with collaborated each other. Because each user application has supported by cloud and computers. In addition, low latency and trustworthy edge computing are needed [4][5]. And also the center cloud has a huge processing power with sophisticated artificial intelligence (AI) functions [6]. Our solution is to dynamically combine objects, computers, memories etc. called resources through optical interconnection [7][8][9].
This paper introduces user application network/cloud resource coordination for the future distributed cloud network era. Especially, ADV is an important user application which need to be supported by network. For ADV, an agent program operating at an edge computer move to an adjacent edge computer flowing to moving the vehicle [10]. This migration must be guarantee less than 10 ms control latency between the vehicle and the agent program.
Network controlled ADV can realizes total vehicles waiting time reduction. For example, there are 3 vehicles at the intersection, sum of waiting time for 3 vehicles are minimized. Of course, maximum waiting time of each vehicle is guaranteed. This control method maximizes “Social Welfare”. This paper describes, how to maximize Social Welfare and impact on the network control method.
The network architecture and techniques proposed herein will be used in future optically interconnected cloud networks.
2. AUTONOMOUS DRIVING VEHICLE IN CONNECTED COMMUNITYThere are two types of approach for realizing ADV. First is a standalone approach as shown in Fig. 1. A robot drives a vehicle with sophisticated artificial intelligence (AI) functions and many sensors. There are many sensors such as a camera, a millimeter wave sensor, and a light detection and ranging (LiDAR) system to detect obstacles and other vehicles. In vehicle processors calculate and control vehicle automatically in standalone. Vehicle communicated to devices such as traffic signals and other vehicles.
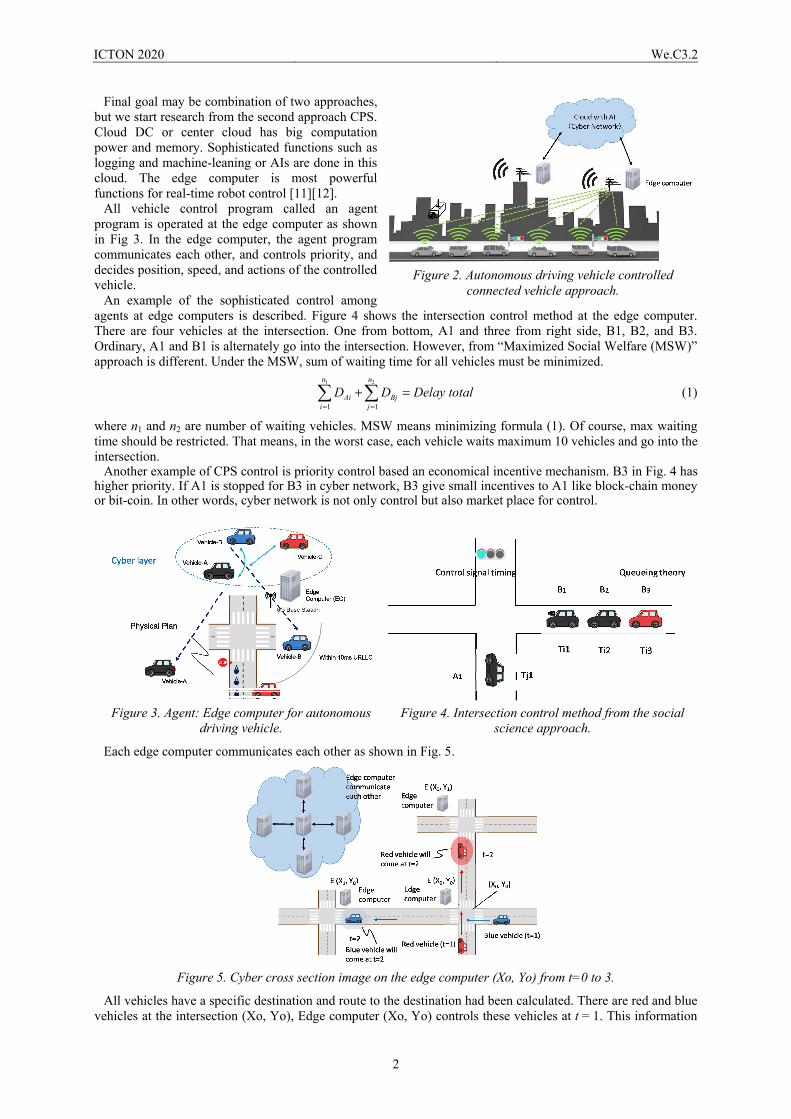
Second approach is a connected vehicle or network controlled vehicle approach in the S&CC network as shown in Fig. 2. A cyber physical system (CPS) is a base concept for this approach. In CPS, a cyber network has a control function and all controls are done in cyber space. A physical vehicle is just controlled from the cyber network like a simple remote-control vehicle. In our opinion, CPS consists of center cloud DC and edge computers. The edge computer can be defined as a network edge computer not a user terminal.
ICTON 2020 We.C3.2
2
Final goal may be combination of two approaches, but we start research from the second approach CPS. Cloud DC or center cloud has big computation power and memory. Sophisticated functions such as logging and machine-leaning or AIs are done in this cloud. The edge computer is most powerful functions for real-time robot control [11][12].
All vehicle control program called an agent program is operated at the edge computer as shown in Fig 3. In the edge computer, the agent program communicates each other, and controls priority, and decides position, speed, and actions of the controlled vehicle.
An example of the sophisticated control among agents at edge computers is described. Figure 4 shows the intersection control method at the edge computer. There are four vehicles at the intersection. One from bottom, A1 and three from right side, B1, B2, and B3. Ordinary, A1 and B1 is alternately go into the intersection. However, from “Maximized Social Welfare (MSW)” approach is different. Under the MSW, sum of waiting time for all vehicles must be minimized.
1 2
1 1
n n
Ai Bji j
D D Delay total= =
+ = (1)
where n1 and n2 are number of waiting vehicles. MSW means minimizing formula (1). Of course, max waiting time should be restricted. That means, in the worst case, each vehicle waits maximum 10 vehicles and go into the intersection.
Another example of CPS control is priority control based an economical incentive mechanism. B3 in Fig. 4 has higher priority. If A1 is stopped for B3 in cyber network, B3 give small incentives to A1 like block-chain money or bit-coin. In other words, cyber network is not only control but also market place for control.
Figure 3. Agent: Edge computer for autonomous driving vehicle.
Figure 4. Intersection control method from the social science approach.
Each edge computer communicates each other as shown in Fig. 5.
Figure 5. Cyber cross section image on the edge computer (Xo, Yo) from t=0 to 3.
All vehicles have a specific destination and route to the destination had been calculated. There are red and blue vehicles at the intersection (Xo, Yo), Edge computer (Xo, Yo) controls these vehicles at t = 1. This information
Figure 2. Autonomous driving vehicle controlled connected vehicle approach.
ICTON 2020 We.C3.2
3
is transferred to adjacent edge computers E (X1, Y0) and E (X0, Y1). Figure 6 shows edge computer (X0, Y0) cyber intersection images from t = 0 to t = 3. At t = 0, only blue vehicle comes right hand side. Next t = 1, blue and red vehicles meet at the intersection. The edge computer has future t = 2, t = 3, condition virtually in the cyber network. In other words, in the cyber network, t = 2, t = 3, all future town condition can be pre-calculated.
Figure 6. Inter section control method from the social science approach.
3. DYNAMIC NETWORK CONFIGURATION BASED ON OPTICAL NETWORK The architecture is designed to suit several typical S&CC applications such as networked robots, ADVs, and big data analysis. Figure 7 shows typical applications for realizing global optical network for S&CC such as network robots, IoT, and ADVs. ADVs are key S&CC application; their cloud processing function must offer trustworthiness and supporting high mobility. Because vehicles move very rapidly, they need real-time response from edge computers. Fifth-generation (5G) wireless access meets the requirement for quick access, but the ability to transfer or migration of processing functions is also very important. We call this “horizontal integration”. Details will be described in next here after. In addition, we demonstrated some experimental system in the articles [13], [14], and [15].
To migrate control program between edge computers, we use tow-layers cut-through among optical network units in the Japanese national project called Elastic Lambda Access Network (E AN) [16][17][18]. Using E AN, live migration via a lower network layer can be realized.
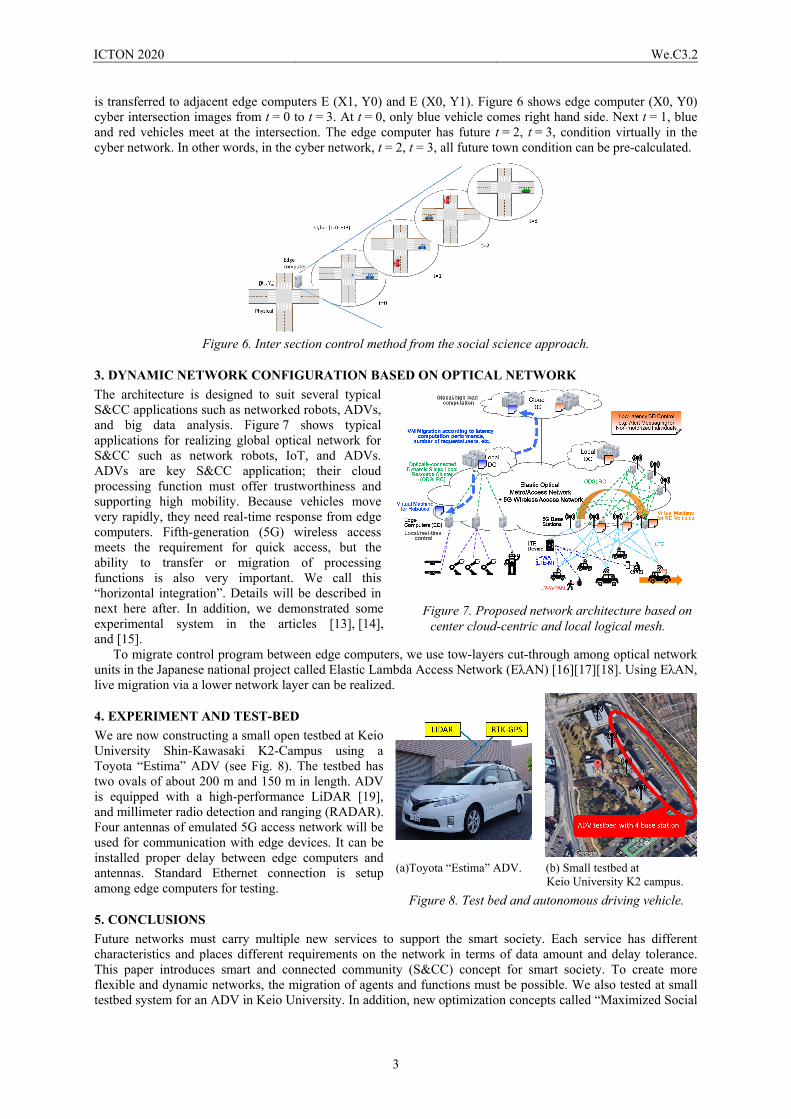
4. EXPERIMENT AND TEST-BED We are now constructing a small open testbed at Keio University Shin-Kawasaki K2-Campus using a Toyota “Estima” ADV (see Fig. 8). The testbed has two ovals of about 200 m and 150 m in length. ADV is equipped with a high-performance LiDAR [19], and millimeter radio detection and ranging (RADAR). Four antennas of emulated 5G access network will be used for communication with edge devices. It can be installed proper delay between edge computers and antennas. Standard Ethernet connection is setup among edge computers for testing.
5. CONCLUSIONS Future networks must carry multiple new services to support the smart society. Each service has different characteristics and places different requirements on the network in terms of data amount and delay tolerance. This paper introduces smart and connected community (S&CC) concept for smart society. To create more flexible and dynamic networks, the migration of agents and functions must be possible. We also tested at small testbed system for an ADV in Keio University. In addition, new optimization concepts called “Maximized Social
Figure 7. Proposed network architecture based on center cloud-centric and local logical mesh.
(a)Toyota “Estima” ADV. (b) Small testbed at Keio University K2 campus.
Figure 8. Test bed and autonomous driving vehicle.
ICTON 2020 We.C3.2
4
Welfare” has been introduced. Using this automated CPS control network, future smart and convenient connected community can be possible.
ACKNOWLEDGEMENTS The author would like to thank Professor Manabu Omae and Dr. Hidetoshi Takeshita of Keio University for his support in the experiments. This work is supported by the JSPS KAKENHI Grant Number JP20H02155. This work is also partly supported by the R&D of innovative optical network technologies for supporting new social infrastructure project (JPJ007460) funded by the Ministry of Internal Affairs and Communications Japan.
REFERENCES [1] C. T. Huynh and E. N. Huh, “Prediction technique for resource allocation in micro data center,” in Proc.
Int. Conf. on Information Networking (ICOIN), Mar. 2015, pp. 483–486. [2] L. Liu, “SDN orchestration for dynamic end-to-end control of data center multi-domain optical
networking,” China Commun., vol. 12, no. 8, pp. 10–21, Aug. 2015. [3] Y. Sun, H. Song, A. J. Jara, and R. Bie, “Internet of things and big data analytics for smart and connected
communities,” IEEE Access, vol. 4, pp. 766–773, Feb. 2016. [4] M. Simsek, A. Aijaz, M. Dohler, J. Sachs, and G. Fettweis, “5G-enabled tactile internet,” IEEE J. Sel.
Areas Commun., vol. 34, no. 3, pp. 460–473, Mar. 2016. [5] Y. Kuwata et al., “Real-time motion planning with applications to autonomous urban driving,” IEEE
Trans. Cont. Syst. Technol., vol. 17, no. 5, pp. 1105–1118, Sep. 2009. [6] M. Marjani et al., “Big IoT data analytics: Architecture, opportunities, and open research challenges,”
IEEE Access, vol. 5, pp. 5247–5261, Mar. 2017. [7] N. Yamanaka et al., “The ACTION project: Application coordinating with transport, IP and optical
networks,” in Proc. 18th Int. Conf. on Transparent Optical Networks (ICTON), Jul. 2016, pp. 1–4. [8] M. Akagi et al., “Cooperating superpeers based service-parts discovery for ubiquitous grid networking
(uGrid),” in Proc. 7th Int. Conf. on Optical Internet, Oct. 2008, pp. 1–2. [9] D. Ishii, K. Nakahara, S. Okamoto, and N. Yamanaka, “A novel IP routing/signaling based service
provisioning concept for ubiquitous grid networking environment,” in Proc. IEEE Globecom Workshops, Dec. 2010, pp. 1746–1750.
[10] N. Yamanaka et al., “Application-triggered automatic distributed cloud/network resource coordination by optically networked inter/intra data-center, ” IEEE/OSA Journal of Optical Communications and Networking, vol. 10, no. 7, pp. B15-B24, Jul. 2018.
[11] Robot Operating System (ROS) [Online]. Available: http://www.ros.org/ [12] M. Quigley, K. Conley, B. Gerkey, J. Faust, T. Foote, J. Leibs, R. Wheeler, and A. Ng, “ROS: An open-
source robot operating system,” in Proc. ICRA Workshop on Open Source Software, vol. 3, no. 3.2, p. 5, May 2009.
[13] N. Yoshikane et al., “First demonstration of geographically unconstrained control of an industrial robot by jointly employing SDN-based optical transport networks and edge compute,” in Proc. 21st OptoElectronics and Communications Conf. (OECC) held jointly with Int. Conf. on Photonics in Switching (PS), Niigata, Japan, Jul. 2016, pp. 1–3.
[14] “Successful remote control of industrial robot by employing SDN-based optical network and cloud/edge computing technology,” iPOP2016 Whitepaper, Jun. 2016 [Online]. Available: https://www.pilab.jp/ipop2016/exhibition/whitepaper.html
[15] T. Sato et al., “Remote control experiments of an industrial robot using two distributed robot controllers,” in Proc. Net-Centric, Arlington, Virginia, Oct. 2017.
[16] T. Sato et al., “Logical optical line terminal placement optimization in the elastic lambda aggregation network with optical distribution network constraints,” J. Opt. Commun. Netw., vol. 7, no. 9, pp. 928–941, Sep. 2015.
[17] S. Okamoto, T. Sato, and N. Yamanaka, “Logical optical line terminal technologies towards flexible and highly reliable metro- and access-integrated networks,” Proc. SPIE, vol. 10129, p. 1012907, Jan. 2017.
[18] T. Kanai et al., “First-time demonstration of automatic service restoration by using inter-central-office OLT handover and optical path switching in metro-access network,” in Proc. 43rd European Conf. on Optical Communication (ECOC), Sep. 2017, paper W.3.D.3.
[19] M. Omae et al., “The application of RTK-GPS and steer-by-wire technology to automatic driving of vehicles and an evaluation of driver behavior,” IATSS Res., vol. 30, no. 2, pp. 29–38, 2006.