Embed Size (px)
Citation preview

DC-DC omvandlare Utfört av Magnus Lindström, Civilingenjörsprogrammet i datateknik och elektronik åk. 5 Handledare och examinator Lars Asplund. akademin för innvation, design och teknik elektronik avancerad nivå 30 hp Köping 2008-01-11

Förord Inriktningen på de kurser jag läst under utbildningen har främst varit mot elektronik men även en del mekanik så då ett examensarbete som inkluderar problem och studier som till viss del inkluderar delar ur båda dessa inriktningar blev tillgängligt och passade tidsmässigt så fångade det mitt intresse. En stor del av mina studier har varit enbart teoretiska så möjligheten att få försöka konstruera och bygga något som verkligen resulterar i en apparat, fungerande eller ej har även det haft en starkt lockande effekt och även fast arbetet har från och till känts lite jobbigt har det i stort sett hela tiden varit intressant och roligt.
Sammanfattning En konstruktion som lagrar energi genom att elmotorer fungerar som generatorer kräver då motorerna kommer arbeta vid ett varierande varvtal någon form av anpassning då även utspänningen kommer variera. Under detta arbete har fokuseringen legat på dimensionering av de elmotorer som ska fungera som generatorer samt den utrustning som ska anpassa spänningen till de delar där den lagras. För att det totala system där dessa delar ingår ska få så stort arbetsområde som möjligt krävs en viss energieffektivitet så en DC-DC omvandlare används för spänningsanpassningen. Denna har konstruerats under förutsättningarna att den ska vara av push-pull typ med switchfrekvensen 500kHz.
Arbetet med motorerna har främst inriktats på dimensionering av linrullar där linor lindas på och av under ett cycliskt förlopp. Energin som genereras kan ej påverkas men dimensionerna på rullarna kommer påverka motorernas rotationshastighet och utspännning samt det moment och den ström som kommer flöda genom systemet. Man kan välja hög spänning och låg ström eller motsatt förhållande men med hänsyn till komponenterna krävs en kompromiss mellan dessa.
DC-DC omvandlaren har konstruerats med en PWM kontrollkrets som genererar switchpulser vars bredd kan kontrolleras genom en yttre signal. Kretsen har strömbegränsningsfunktioner som kan användas för att motverka viss obalans i konstruktionen samt för att skydda komponenter från att förstöras under extrema förhållanden eller funktionsfel. En stor del av arbetet med DC-DC omvandlaren är koncentrerat kring swtichtransformatorn samt formgivningen av kretskortet
Simuleringsprogram används för att underlätta felsökning och testning av komponenter med olika beskaffenhet. En simuleringsmodell över switchtransformatorn samt de viktigaste kringliggande komponentern skapas och en del av simuleringsresultaten med denna modell jämförs med verkliga mätningar och redovisas i dokumentet.
Abstract The contents of this thesis describes the work that have been done in dimensioning permanent magnetized DC motors, their attached bobins where tapes are winded and a DC-DC converter in push-pull topology that is used to adapt the voltage produced by the motors to a controlled output voltage. This voltage is to be applied over a large capacitor in order to momentarely store energy that is produced when the stripes are pulled from the bobins and makes them spinn with various rpm. Calculations have been made regarding power levels and velocities of the stripes in order to make a choice of the most appropiate motor model and dimension of the bobins. This results have then been used to dimensioning components of the DC-DC converter that is to be operated at the relativley high frequency of 500 kHz.
1 Inledning.................................................................................................................................. 1 1.1 Bakgrund .......................................................................................................................... 1 1.2 Problem ............................................................................................................................ 1 1.3 syfte .................................................................................................................................. 1 1.4 Övrigt ............................................................................................................................... 1
1.4.1 målgrupp.................................................................................................................... 1 1.4.2 dokumentstruktur ...................................................................................................... 1
2 Metod ...................................................................................................................................... 2 3 Teori ........................................................................................................................................ 3
3.1 energi ................................................................................................................................ 3 3.2 likspänningsmotor ............................................................................................................ 3 3.3 DC-DC omvandlaren........................................................................................................ 4
3.3.1 lindningsutformning .................................................................................................. 4 3.3.2 obalans....................................................................................................................... 4 3.3.3 läckinduktans och lindningskapacitans ..................................................................... 5 3.3.4 snubber ...................................................................................................................... 6
4 Förberedande arbete ................................................................................................................ 7 4.1 bandets högsta och lägsta hastighet.................................................................................. 7 4.2 största utrullningskraft...................................................................................................... 7
5 Val av motor............................................................................................................................ 7 6 Bandrullarnas mått .................................................................................................................. 8
6.1 Innerradie ......................................................................................................................... 8 6.2 Ytterradie.......................................................................................................................... 9
7 Generatorns elektriska egenskaper.......................................................................................... 9 7.1 Lindningarnas likströmsmotstånd .................................................................................... 9 7.2 moment- och elektrisk konstant ..................................................................................... 10 7.3 lägsta genererade spänning............................................................................................. 10 7.4 högsta genererade spänning ........................................................................................... 11 7.5 maximal medeleffekt...................................................................................................... 11
7.5.1 Energin i ett stavtag................................................................................................. 11 7.5.2 Medelström.............................................................................................................. 12 7.5.3 Effektförlust i lindningarna ..................................................................................... 12
8 Specifikationer för DCDC- omvandlaren.............................................................................. 12 8.1.1 primär- och sekundärspänning ................................................................................ 13 8.1.2 Primärström............................................................................................................. 13
9 Switchtransformator .............................................................................................................. 14 9.1 Specifikationer ............................................................................................................... 14 9.2 effekt............................................................................................................................... 15 9.3 elektrisk och kärngeometrisk konstant ........................................................................... 15 9.4 kärna ............................................................................................................................... 15 9.5 ledararea ......................................................................................................................... 15 9.6 Skineffekt ....................................................................................................................... 16 9.7 lindningsvarv .................................................................................................................. 16 9.8 Trådplacering ................................................................................................................. 17 9.9 lindningsförluster ........................................................................................................... 17 9.10 kärnförlust .................................................................................................................... 18 9.11 temperaturhöjning ........................................................................................................ 18
10 Strömtransformator ............................................................................................................. 18 10.1 Specifikationer ............................................................................................................. 19 10.2 Sekundärström.............................................................................................................. 19
10.3 Sekundärlindning ......................................................................................................... 19 10.4 kärnans tvärsnittsarea ................................................................................................... 20 10.5 Lindningstråd ............................................................................................................... 20 10.6 sekundärlindningens motstånd ..................................................................................... 21 10.7 primärlindningens motstånd......................................................................................... 22 10.8 Uteffekt......................................................................................................................... 22 10.9 värden för vald kärna.................................................................................................... 23 10.10 temperaturhöjning ...................................................................................................... 23
11 Switchtransistor ................................................................................................................... 24 11.1.1 Switchförlust ......................................................................................................... 24 11.1.2 ledförlust................................................................................................................ 24 11.1.3 Totalförlust ............................................................................................................ 24 11.1.4 temperaturhöjning ................................................................................................. 25
12 Ingångskondensator............................................................................................................. 25 13 Likriktardioder .................................................................................................................... 26
13.1.1 ledförlust................................................................................................................ 26 13.1.2 Switchförlust ......................................................................................................... 27 13.1.3 totalförlust ............................................................................................................. 27 13.1.4 temperaturhöjning ................................................................................................. 27
14 Praktiskt genomförande....................................................................................................... 27 14.1 komponenter................................................................................................................. 27 14.2 layout ............................................................................................................................ 27 14.3 ledarinduktans och kapacitans...................................................................................... 28 14.4 provkörning och mätning ............................................................................................. 30
14.4.1 problem.................................................................................................................. 30 14.4.2 snubbervärden ....................................................................................................... 30
14.5 Strömtransformator ...................................................................................................... 31 14.6 Utspänningsrippel......................................................................................................... 31 14.7 Uteffekt och verkningsgrad .......................................................................................... 32
15 Simulering ........................................................................................................................... 33 15.1 komponenter................................................................................................................. 33 15.2 resultat .......................................................................................................................... 34
15.2.1 Vd .......................................................................................................................... 34 15.2.2 sekundärspänning .................................................................................................. 35 15.2.3 strömtransformator ................................................................................................ 35
15.3 B-H diagram................................................................................................................. 36 16 Analys och slutsatser ........................................................................................................... 37
16.1 motorerna ..................................................................................................................... 37 16.2 DC-DC omvandlaren.................................................................................................... 39 16.3 Simulering .................................................................................................................... 40
17 Källförteckning.................................................................................................................... 41
sid. 1
1 Inledning
1.1 Bakgrund Iden går ut på att ta tillvara och lagra mekanisk energi på ett sätt som till stor del liknar de önskningar om att ta tillvara rörelseenergin i fordon vid inbromsningar för att sedan återföra den då de accelererar. Under ett intervall av en period tillförs mekanisk energi som lagras för att sedan användas till att återställa systemet till utgångsläget så att en ny period kan börja. För att möjliggöra kontroll och enkel hantering av energiflödet ska under perioden den mekaniska energin omvandlas till elektrisk och tillbaka igen.
1.2 Problem Elektrisk energi som omvandlats från mekanisk i form av en likspänningsmotoraxels rotation kommer ha en spänning som är proportionell med axelns rotationshastighet. Då den elektriska energin ska lagras i en kondensator bör spänningen vara stabil så det krävs att den varierande generatorspänningen omvandlas till en kontrollerbar kondensatorspänning.
Risken finns att generatorn övervarvas så ett ytterligare krav är att man har kontroll över energiuttaget från generatorn och på det viset kan styra axelns vridmoment.
Ett viss mått av energi måste kunna lagras ned till en undre gräns på mängden tillförd energi. Detta ställer krav på konstruktionens energieffektivitet.
1.3 syfte Studiens syfte är att uppskatta och bedöma formen och mängden på den energi som ska omvandlas till elektrisk för att kunna bestämma rimliga gränsvärden och rekommendera lämplig likspänningsmotor.
Med ledning av de bestämda gränsvärdena samt givna förutsättningar ingår även dimensionering och till viss del konstruktion av en push-pull omvandlare som ska ombesörja en stabil spänning över kondensatorn samt delvis användas för att kontrollera effektuttaget från generatorn.
1.4 Övrigt
1.4.1 målgrupp Studien riktar sig främst till teknik och elektronikintresserade, innehållet utgörs till en stor del av tekniska termer varav en del är förklarade men de flesta förutsätts vara förståeliga för målgruppen.
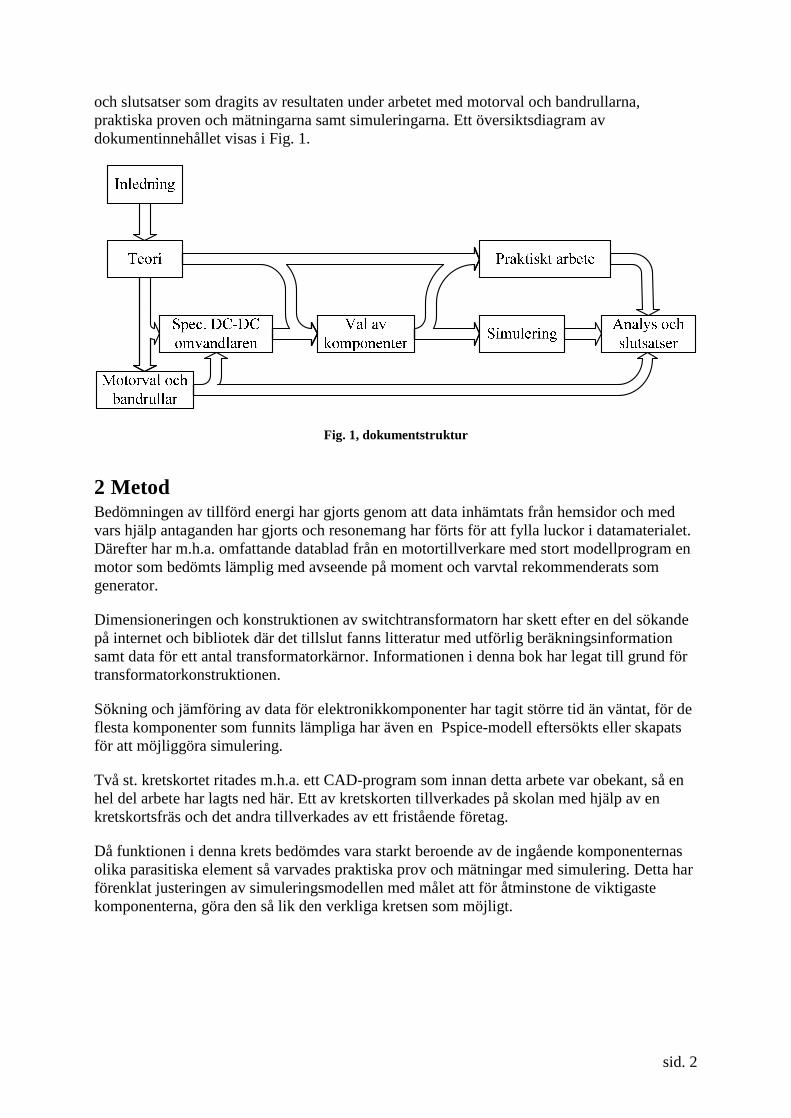
1.4.2 dokumentstruktur Inledningen av dokumentet har en teoridel som innehåller översiktligt information om energi, likspänningsmotorn och DC-DC omvandlaren som ligger till grund för resonemangen och beräkningarna i efterföljande delar. Sedan beskrivs det förberedande, till största delen teoretiska arbetet med att välja lämpliga motorer och dimensioner på bandrullarna. Det teoretiska arbetet fortsätter och i efterföljande sektioner beskrivs specifikationen av DC-DC omvandlarens parametrar, beräkning av transformatorerna och dimensioneringen av övriga kritiska komponenter. I de slutliga delarna beskrivs det praktiska genomförandet med kretskortstillverkning och provkörning samt simuleringsarbetet. Allra sist finns de analyser
sid. 2
och slutsatser som dragits av resultaten under arbetet med motorval och bandrullarna, praktiska proven och mätningarna samt simuleringarna. Ett översiktsdiagram av dokumentinnehållet visas i Fig. 1.
Fig. 1, dokumentstruktur
2 Metod Bedömningen av tillförd energi har gjorts genom att data inhämtats från hemsidor och med vars hjälp antaganden har gjorts och resonemang har förts för att fylla luckor i datamaterialet. Därefter har m.h.a. omfattande datablad från en motortillverkare med stort modellprogram en motor som bedömts lämplig med avseende på moment och varvtal rekommenderats som generator.
Dimensioneringen och konstruktionen av switchtransformatorn har skett efter en del sökande på internet och bibliotek där det tillslut fanns litteratur med utförlig beräkningsinformation samt data för ett antal transformatorkärnor. Informationen i denna bok har legat till grund för transformatorkonstruktionen.
Sökning och jämföring av data för elektronikkomponenter har tagit större tid än väntat, för de flesta komponenter som funnits lämpliga har även en Pspice-modell eftersökts eller skapats för att möjliggöra simulering.
Två st. kretskortet ritades m.h.a. ett CAD-program som innan detta arbete var obekant, så en hel del arbete har lagts ned här. Ett av kretskorten tillverkades på skolan med hjälp av en kretskortsfräs och det andra tillverkades av ett fristående företag.
Då funktionen i denna krets bedömdes vara starkt beroende av de ingående komponenternas olika parasitiska element så varvades praktiska prov och mätningar med simulering. Detta har förenklat justeringen av simuleringsmodellen med målet att för åtminstone de viktigaste komponenterna, göra den så lik den verkliga kretsen som möjligt.

sid. 3
3 Teori
3.1 energi Den mekaniska energi Q motoraxeln utvecklar kan beskrivas m.h.a. dess vinkelhastighet ω och utvecklat vridmoment M enligt
Q Mω=
Anger man vinkelhastigheten i rad/s och vridmomentet i Nm så får man energin i J eller Ws. Motsvarande förbrukade elektriska energi P får man då spänningen U anges i volt och den levererade strömmen I anges i ampere enligt
P UI=
Vinkelhastigheten ω kan beskrivas m.h.a periferihastigheten v och avståndet r till centrum enligt
( / )rad sω
( / )v m s( )r m
vr
ω =
Vridmomentet M kan beskrivas m.h.a kraften F och avståndet r till centrum enligt
( )M Nm
( )F N( )r m
M Fr=
3.2 likspänningsmotor Det moment M som utvecklas i en permanentmagnetiserad motor har ett linjärt förhållande
mk till den av motorn konsumerade strömmen I enligt
mM k I=
Motorns varvtal har vid konstant belastning även ett linjärt förhållande ek till den pålagda spänningen U enligt
e
Uk
ω =
sid. 4
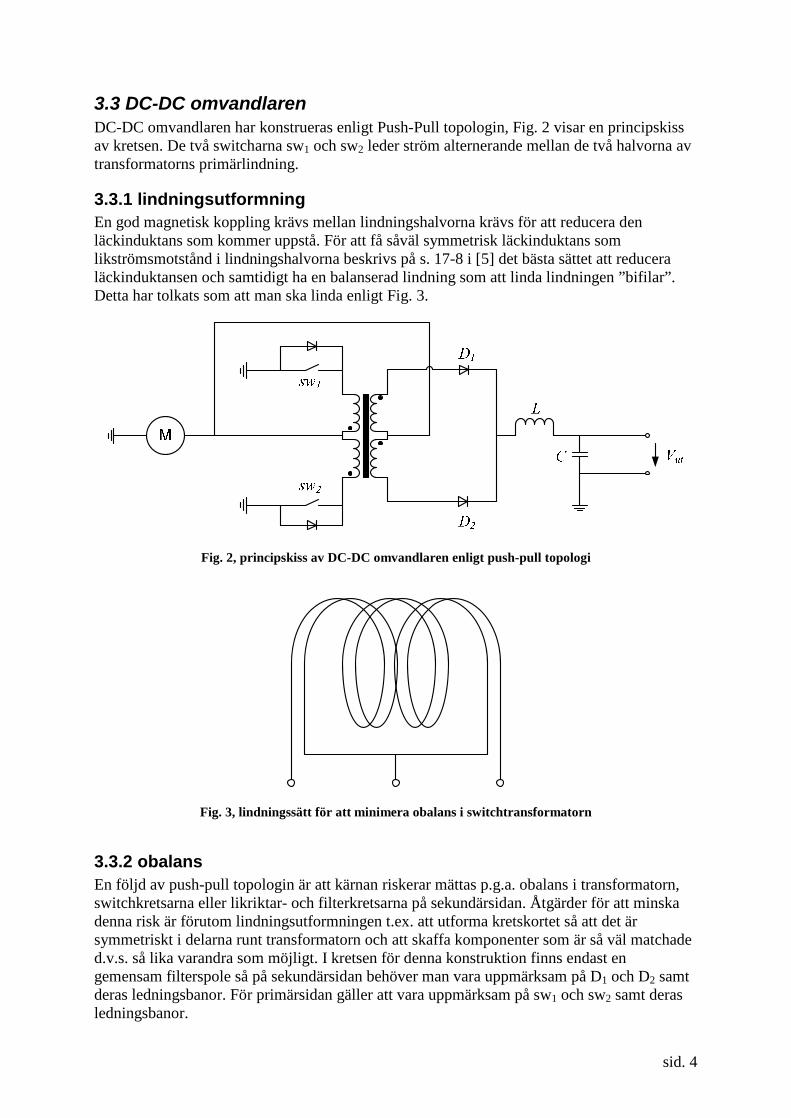
3.3 DC-DC omvandlaren DC-DC omvandlaren har konstrueras enligt Push-Pull topologin, Fig. 2 visar en principskiss av kretsen. De två switcharna sw1 och sw2 leder ström alternerande mellan de två halvorna av transformatorns primärlindning.
3.3.1 lindningsutformning En god magnetisk koppling krävs mellan lindningshalvorna krävs för att reducera den läckinduktans som kommer uppstå. För att få såväl symmetrisk läckinduktans som likströmsmotstånd i lindningshalvorna beskrivs på s. 17-8 i [5] det bästa sättet att reducera läckinduktansen och samtidigt ha en balanserad lindning som att linda lindningen ”bifilar”. Detta har tolkats som att man ska linda enligt Fig. 3.
Fig. 2, principskiss av DC-DC omvandlaren enligt push-pull topologi
Fig. 3, lindningssätt för att minimera obalans i switchtransformatorn
3.3.2 obalans En följd av push-pull topologin är att kärnan riskerar mättas p.g.a. obalans i transformatorn, switchkretsarna eller likriktar- och filterkretsarna på sekundärsidan. Åtgärder för att minska denna risk är förutom lindningsutformningen t.ex. att utforma kretskortet så att det är symmetriskt i delarna runt transformatorn och att skaffa komponenter som är så väl matchade d.v.s. så lika varandra som möjligt. I kretsen för denna konstruktion finns endast en gemensam filterspole så på sekundärsidan behöver man vara uppmärksam på D1 och D2 samt deras ledningsbanor. För primärsidan gäller att vara uppmärksam på sw1 och sw2 samt deras ledningsbanor.
sid. 5
Det är omöjligt att helt undvika obalans i kretsen och i [11] står beskrivet några möjliga sätt att kompensera för obalansen genom att använda strömbegränsnings- och kontrollkretsar som under varje puls känner av strömförbrukningen och vid behov kan minska motsvarande pulsbredd eller som sista åtgärd helt inaktivera kretsen då risk för haveri föreligger. Dessa funktioner finns i många fall inbyggda i moderna PWM-kontroller-kretsar.
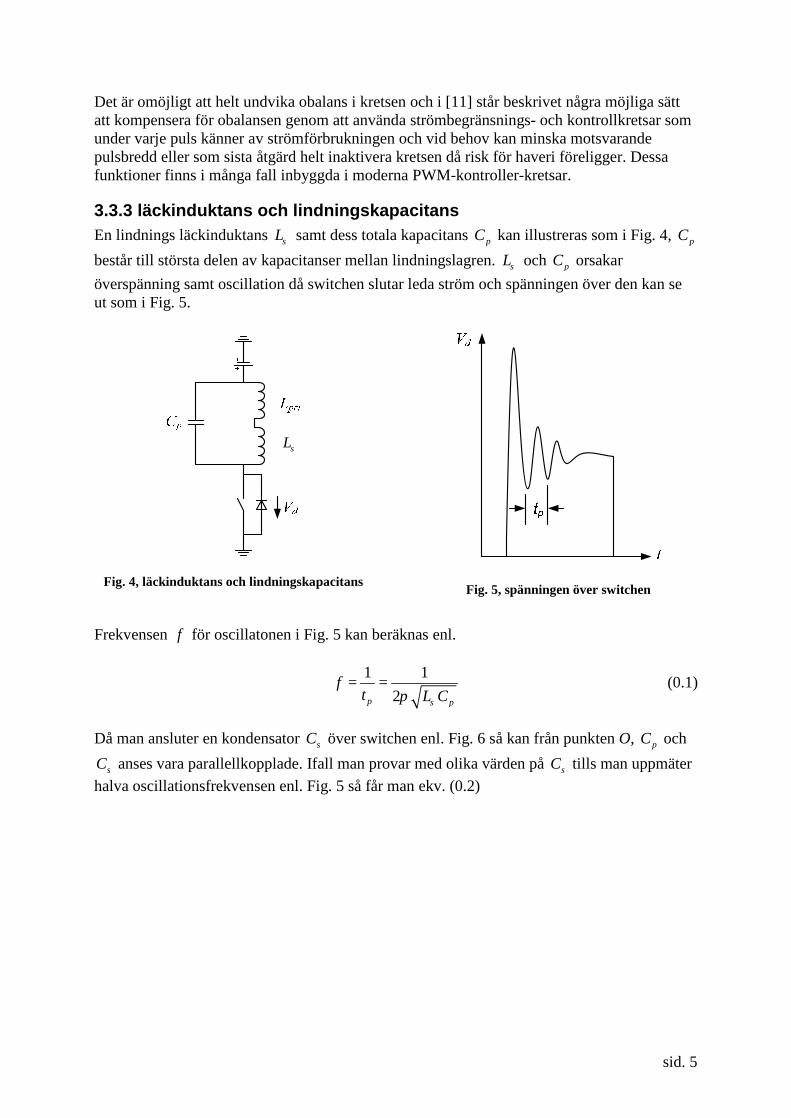
3.3.3 läckinduktans och lindningskapacitans En lindnings läckinduktans Lσ samt dess totala kapacitans pC kan illustreras som i Fig. 4, pC består till största delen av kapacitanser mellan lindningslagren. Lσ och pC orsakar överspänning samt oscillation då switchen slutar leda ström och spänningen över den kan se ut som i Fig. 5.
Lσ
Fig. 4, läckinduktans och lindningskapacitans
Fig. 5, spänningen över switchen
Frekvensen f för oscillatonen i Fig. 5 kan beräknas enl.
1 12p p
ft L Cσπ
= = (0.1)
Då man ansluter en kondensator sC över switchen enl. Fig. 6 så kan från punkten O, pC och
sC anses vara parallellkopplade. Ifall man provar med olika värden på sC tills man uppmäter halva oscillationsfrekvensen enl. Fig. 5 så får man ekv. (0.2)
sid. 6
Lσ
Fig. 6
( )1
2 2 p s
f
L C Cσπ=
+ (0.2)
Då man sätter in ekv.(0.1) i (0.2) får man
13p sC C= (0.3)
Med hjälp av värdet på pC så kan man beräkna läckinduktansen genom omskrivning av ekv.(0.1)
( )2
12 p
Lf Cσ
π= (0.4)
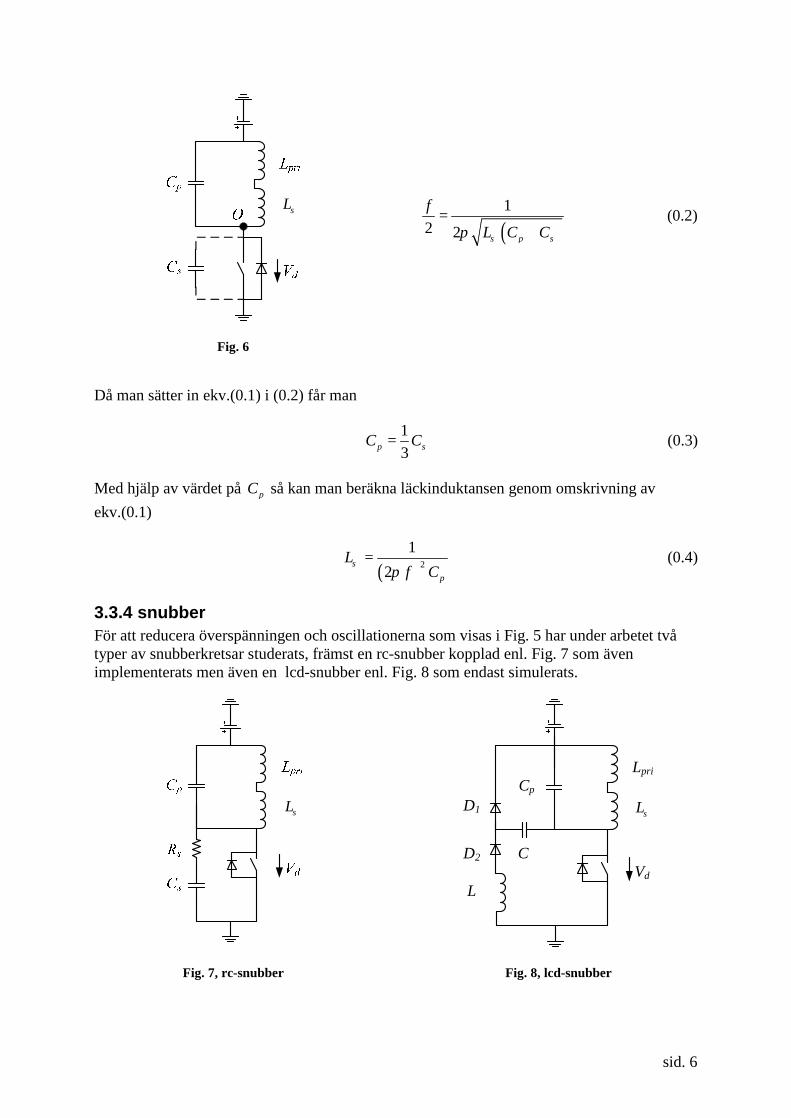
3.3.4 snubber För att reducera överspänningen och oscillationerna som visas i Fig. 5 har under arbetet två typer av snubberkretsar studerats, främst en rc-snubber kopplad enl. Fig. 7 som även implementerats men även en lcd-snubber enl. Fig. 8 som endast simulerats.
Lσ
Fig. 7, rc-snubber
Lpri
Lσ
Cp
L
C
D1
D2Vd
Fig. 8, lcd-snubber
sid. 7
I [10] där proceduren med att bestämma läckinduktansen och lindningskapacitansen beskrivs anger man att motståndet sR som tillsammans med kondensatorn sC utgör rc-snubbern, ska ha samma värde som läckinduktansens impedans vid oscillationsfrekvensen. Impedansen kan beräknas enl. ekv.(0.5). Lämpligt värde på kondensatorn sC anges vara 4 pC till 10 pC .
p
LZC
σ= (0.5)
4 Förberedande arbete
4.1 bandets högsta och lägsta hastighet Motoraxelns varvtal kommer bestämmas av hastigheten med vilken ett band snurras av en på axeln fastsatt spole. Bandet kommer vara fäst i änden på en längdåkningsstav och dras ut i samband med rörelsen under ett stavtag. För att göra en rimlig bedömning av maximala hastigheten under denna rörelse bestämde jag mig för att använda segertiden för distansen 15km under Skid VM2007 i Sapporo. Enl. [4] vann Lars Berger, Norge på tiden 35.50,0 så snitthastigheten för sträckan blir ca. 7 m/s. Antar man att stavarna ej slinter mot marken så kommer denna hastighet även gälla för dem och bandets maximala hastighet maxv kan bestämmas till 7 m/s.
Jag har bedömt min promenadhastighet som den lägsta meningsfulla träningshastigheten för en skidåkare. En promenaden på 10 km brukar ta ca. 2 tim. så genomsnittshastigheten blir ca. 1.39 m/s vilket får blir bandets lägsta hastighet minv
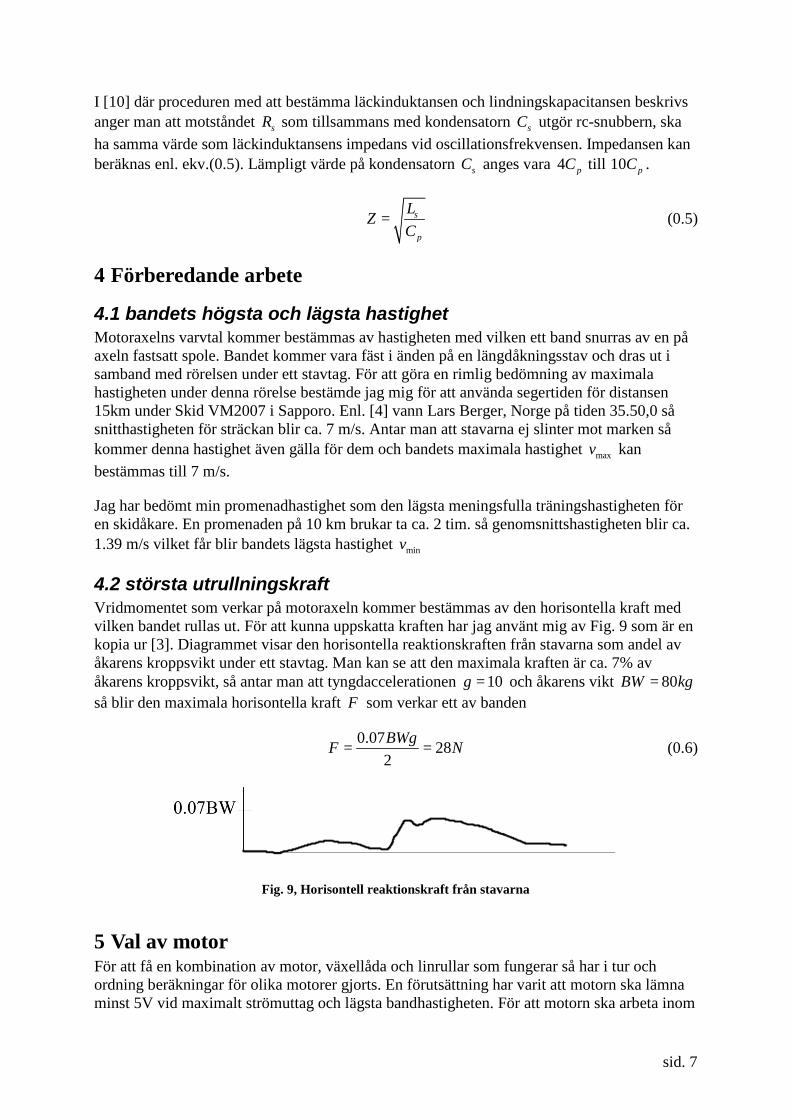
4.2 största utrullningskraft Vridmomentet som verkar på motoraxeln kommer bestämmas av den horisontella kraft med vilken bandet rullas ut. För att kunna uppskatta kraften har jag använt mig av Fig. 9 som är en kopia ur [3]. Diagrammet visar den horisontella reaktionskraften från stavarna som andel av åkarens kroppsvikt under ett stavtag. Man kan se att den maximala kraften är ca. 7% av åkarens kroppsvikt, så antar man att tyngdaccelerationen 10g = och åkarens vikt 80BW kg= så blir den maximala horisontella kraft F som verkar ett av banden
0.07 282BWgF N= = (0.6)
Fig. 9, Horisontell reaktionskraft från stavarna
5 Val av motor För att få en kombination av motor, växellåda och linrullar som fungerar så har i tur och ordning beräkningar för olika motorer gjorts. En förutsättning har varit att motorn ska lämna minst 5V vid maximalt strömuttag och lägsta bandhastigheten. För att motorn ska arbeta inom
sid. 8
ett acceptabelt varvtalsområde så blir varvtalet lågt vid lägsta bandhastigheten och den begränsande parametern blir motorlindningarnas likströmsmotstånd. En modell som bedöms uppfylla villkoren är GR63X55. Med ledning av diagram och tabeller över motordata i [2] så har följande bedömningar med avseende på maximalt varvtal och moment gjorts.
• Motorns varvtal bör ej överstiga 5000 rpm. För att ej få under 5V utspänning vid lägsta varvtalet väljs dock ett maxvarvtal på _ max 7500motorn rpm= .
• Motorns moment bör ej överstiga 2Nm så _ max 2motorM Nm= . Då motorn är försedd med en växellåda med utväxlingen 8:1 kommer motsvarande begränsningar för utgående axel bli:
• Axelns varvtal bör ej överstiga _ max _ max / 8 938axel motorn n rpm= ≈ . • Axelns moment bör ej överstiga _ max _ max8 16axel motorM M Nm= = .
6 Bandrullarnas mått Då motorn är vald måste man vid dimensionering av bandrullarna vara uppmärksam på motorns maximala moment och varvtal. Jag har valt att först bestämma bandrullens innerdiameter så att motorns maxvarvtal ej överstigs för att sedan beräkna det maximala moment som kommer utvecklas då allt band är upprullat. Ifall momentet understiger bedömt maxmoment så är rullarnas dimensioner ok.
6.1 Innerradie Axelns högsta tillåtna vinkelfrekvens blir
_ max_ max 2 98 /
60axel
axel
nrad sω π= ≈ (0.7)
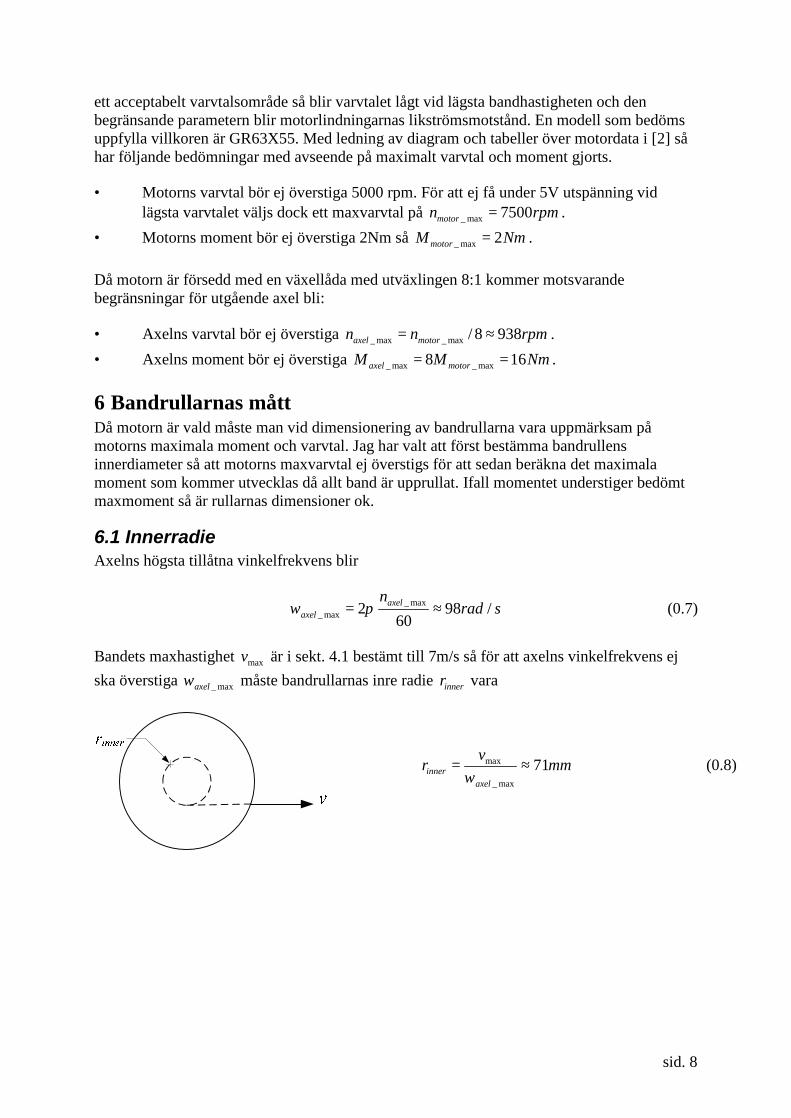
Bandets maxhastighet maxv är i sekt. 4.1 bestämt till 7m/s så för att axelns vinkelfrekvens ej ska överstiga _ maxaxelω måste bandrullarnas inre radie innerr vara
max
_ max
71inneraxel
vr mmω
= ≈ (0.8)
sid. 9
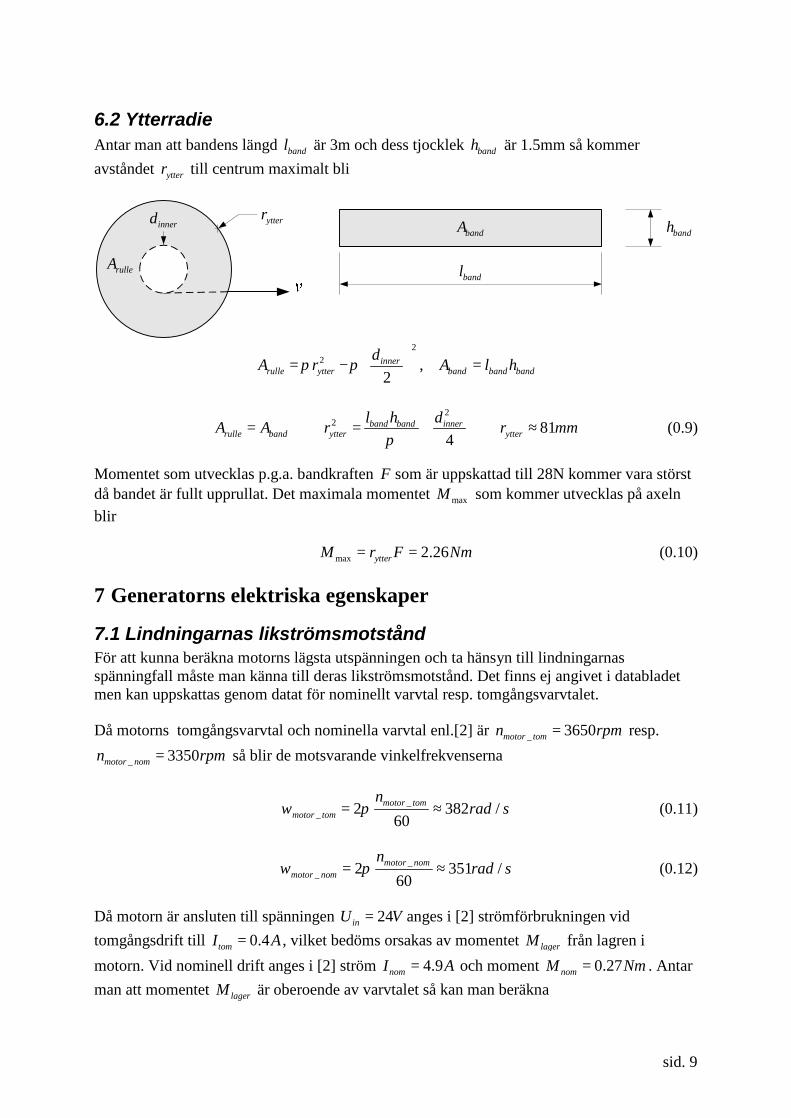
6.2 Ytterradie Antar man att bandens längd bandl är 3m och dess tjocklek bandh är 1.5mm så kommer avståndet ytterr till centrum maximalt bli
innerd
rulleA
ytterrbandh
bandl
bandA
2
2 ,2
innerrulle ytter band band band
dA r A l hπ π = − =
2
2 814
band band innerrulle band ytter ytter
l h dA A r r mmπ
= ⇒ = + ⇒ ≈ (0.9)
Momentet som utvecklas p.g.a. bandkraften F som är uppskattad till 28N kommer vara störst då bandet är fullt upprullat. Det maximala momentet maxM som kommer utvecklas på axeln blir
max 2.26ytterM r F Nm= = (0.10)
7 Generatorns elektriska egenskaper
7.1 Lindningarnas likströmsmotstånd För att kunna beräkna motorns lägsta utspänningen och ta hänsyn till lindningarnas spänningfall måste man känna till deras likströmsmotstånd. Det finns ej angivet i databladet men kan uppskattas genom datat för nominellt varvtal resp. tomgångsvarvtalet.
Då motorns tomgångsvarvtal och nominella varvtal enl.[2] är _ 3650motor tomn rpm= resp.
_ 3350motor nomn rpm= så blir de motsvarande vinkelfrekvenserna
__ 2 382 /
60motor tom
motor tom
nrad sω π= ≈ (0.11)
__ 2 351 /
60motor nom
motor nom
nrad sω π= ≈ (0.12)
Då motorn är ansluten till spänningen 24inU V= anges i [2] strömförbrukningen vid tomgångsdrift till 0.4tomI A= , vilket bedöms orsakas av momentet lagerM från lagren i motorn. Vid nominell drift anges i [2] ström 4.9nomI A= och moment 0.27nomM Nm= . Antar man att momentet lagerM är oberoende av varvtalet så kan man beräkna
sid. 10
Motorns förbrukade effekt in nomU I vid nominell drift blir
2_ _ _ _ _in nom lindning nom lager nom axel nom nom motor nom lager motor nom nomU I P P P I R M Mω ω= + + = + + (0.13)
Motorns förbrukade effekt in tomU I vid tomgång blir
2_ _ _in tom lindning tom lager tom tom motor tom lagerU I P P I R Mω= + = + (0.14)
Löser man ut lagerM ur ekv. (0.13) och (0.14), sätter dem som lika och skriver om ekvationerna med avseende på lindningarnas likströmsmotstånd R så får man
_ _ _ _2 2
_ _
0.59in nom motor tom nom motor tom motor nom in tom motor nom
nom motor tom tom motor nom
U I M U IR
I Iω ω ω ω
ω ω
− −= ≈ Ω
− (0.15)
7.2 moment- och elektrisk konstant Även motorns moment- och elektriska konstant behövs då motorns lägsta utspänning ska beräknas. Motorns momentkonstant mk kan beräknas enl. ekv. 13-10 i [1], ur den ström
4.9nomI A= som konsumeras då nominellt moment 0.27nomM Nm= utvecklas enl. [2].
0.0551nomm
nom
MkI
= ≈ (0.16)
Vid nominell drift blir motorns motemk
_ 21.1emk nom in nomV U I R V= − ≈ (0.17)
Motorns spänningskonstant ek blir då enl. ekv. 13-11 i [1].
_
_
0.0602emk nome
motor nom
Vk
ω= ≈ (0.18)
7.3 lägsta genererade spänning Motorns utspänning kommer bli lägst då maximalt moment utvecklas och varvtalet är som lägst vilket kommer inträffa då bandet är fullt pårullat. Den ström maxI som kommer behövas för att utveckla maximalt moment maxM blir
maxmax
1 5.18 m
MI Ak
= ⋅ ≈ (0.19)
Den lägsta bandhastigheten minv har i sekt. 4.1 bedömts till 1.39 m/s och då bandrullen är full får axeln den lägsta vinkelfrekvensen _ minaxelω som blir
min_ min 17.2 /axel
ytter
v rad sr
ω = ≈ (0.20)
sid. 11
Utspänningen kommer sänkas p.g.a. spänningsfall i lindningarna och bli lägst vid minimalt varvtal samt maxbelastning. Den lägsta utspänningen _ mingenV blir
_ min _ min max8 5.27gen e axelV k I R Vω= ⋅ − ≈ (0.21)
7.4 högsta genererade spänning Den högsta spänningen _ maxgenV kommer genereras vid maximalt varvtal som inträffar då bandet nästan är helt utrullat utan belastning och axeln får den högsta vinkelhastigheten
_ maxaxelω
_ max _ max8 47.3gen e axelV k Vω= ⋅ ≈ (0.22)
7.5 maximal medeleffekt
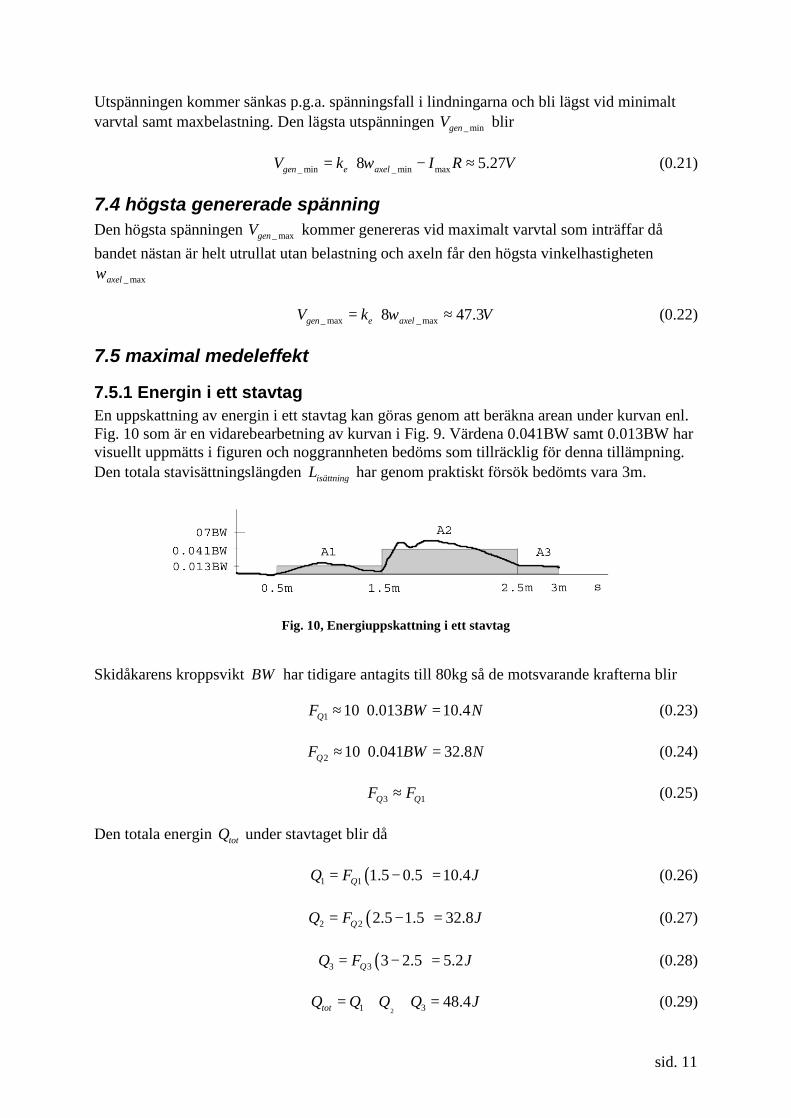
7.5.1 Energin i ett stavtag En uppskattning av energin i ett stavtag kan göras genom att beräkna arean under kurvan enl. Fig. 10 som är en vidarebearbetning av kurvan i Fig. 9. Värdena 0.041BW samt 0.013BW har visuellt uppmätts i figuren och noggrannheten bedöms som tillräcklig för denna tillämpning. Den totala stavisättningslängden isättningL har genom praktiskt försök bedömts vara 3m.
Fig. 10, Energiuppskattning i ett stavtag
Skidåkarens kroppsvikt BW har tidigare antagits till 80kg så de motsvarande krafterna blir
1 10 0.013 10.4QF BW N≈ ⋅ = (0.23)
2 10 0.041 32.8QF BW N≈ ⋅ = (0.24)
3 1Q QF F≈ (0.25)
Den totala energin totQ under stavtaget blir då
( )1 1 1.5 0.5 10.4QQ F J= − = (0.26)
( )2 2 2.5 1.5 32.8QQ F J= − = (0.27)
( )3 3 3 2.5 5.2QQ F J= − = (0.28)
21 3 48.4totQ Q Q Q J= + + = (0.29)
sid. 12
Energin Q ska beräknas för endast en stav
242totQQ J= ≈ (0.30)
Då åkarens hastighet maxv redan antagits till 7m/s och stavisättningslängden isättningL till 3m så kommer för varje sekund denna period upprepas
2.3isättning
v ggrL
≈ (0.31)
Effekten stavP som ska ledas bort blir
2.3 55 55stavP Q Js W= ≈ = (0.32)
7.5.2 Medelström Medelkraften medelF under ett stavtag blir
8medelisättning
QF NL
= ≈ (0.33)
Medelmomentet medelM blir
0.612
ytter innermedel medel inner
r rM F r Nm
− = + ≈
(0.34)
Medelströmmen medelI blir
1 1.388
medelmedel
m
MI Ak
= ⋅ ≈ (0.35)
7.5.3 Effektförlust i lindningarna Effektförlusten RP i motorlindningarna blir
2 1.12R medelP I R W= ≈ (0.36)
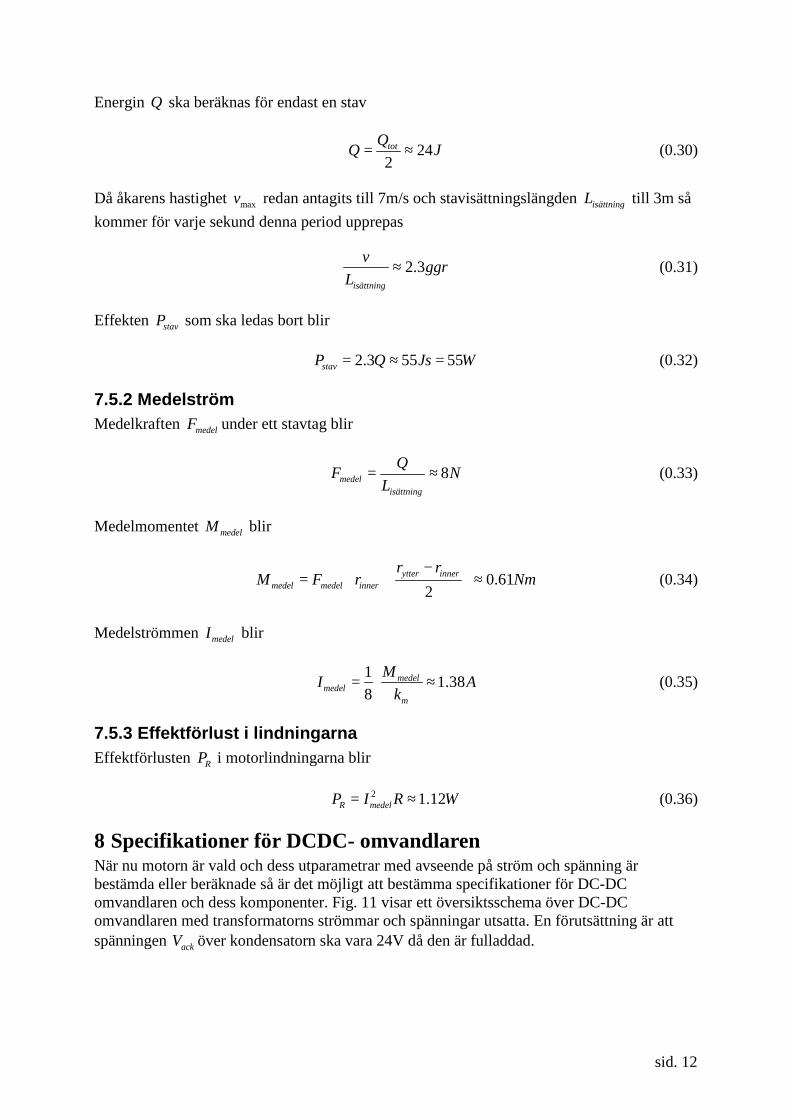
8 Specifikationer för DCDC- omvandlaren När nu motorn är vald och dess utparametrar med avseende på ström och spänning är bestämda eller beräknade så är det möjligt att bestämma specifikationer för DC-DC omvandlaren och dess komponenter. Fig. 11 visar ett översiktsschema över DC-DC omvandlaren med transformatorns strömmar och spänningar utsatta. En förutsättning är att spänningen ackV över kondensatorn ska vara 24V då den är fulladdad.
sid. 13
Fig. 11, Översiktsschema
8.1.1 primär- och sekundärspänning Enligt schemat i Fig. 11 kommer DC-DC omvandlarens utspänning _DC utV adderas till generatorns utspänning genV . I ekv.(0.21) beräknades generatorns lägsta utspänning vid tomgång till 5.27V, man kan för enkelhetens skull ange värdet till
_ min 5gen priV V V= = (0.37)
För att då leverera ackumulatorspänningen ackV på 24V krävs en utspänning _DC utV från DCDC- omvandlaren på
_ _ min 19DC ut ack genV V V V= − ≈ (0.38)
Antar man diodspänningsfallet 1dV V= så måste sekundärspänningen sekV vara
_ 20sek DC ut dV V V V= + = (0.39)
8.1.2 Primärström Fördelningen av totalströmmen maxI mellan strömmen DCI genom transformatorns primärlindning och strömmen genI som går direkt till sekundärsidan kan beräknas enl.
_ mingengen
load
VI
R= (0.40)
_ _
_ min
DC ut DC utDC
gen load
V VI
V R= ⋅ (0.41)
maxgen DCI I I+ = (0.42)
sid. 14
Ekv.(0.40), (0.41) och (0.42) medför
2
_max2 2
_ min _
4.75DC utDC
gen DC ut
VI I A
V V= ≈
+ (0.43)
Strömmen DCI delas tidsmässigt mellan de bägge primärlindningarna så effektivvärdet priI blir
2.42DC
priII A= ≈ (0.44)
9 Switchtransformator Switchtransformatorn som är en viktig komponent i DC-DC omvandlaren har beräknats och formgivits med ledning av beräkningsexempel som börjar på sidan 7-21 i [5]. Strukturen i beräkningarna bygger på att man först bestämmer transformatorns specifikationer där vissa parametrar är beräknade eller bestämda tidigare och andra som switchfrekvens, verkningsgrad och maximal flödestäthet bestäms i detta skede
Man beräknar sedan transformatorns totala skenbara effekt och använder detta värde då man beräknar en kärnkonstant. Denna kan man sedan jämföra med motsvarande färdigberäknade konstanter för befintliga kärnor och på det viset välja en lämplig kärna ur tabeller i boken. Sedan beräknas den ledningsarea och lindningsvarv som krävs vid de aktuella förhållandena och sist beräknas förluster och transformatorns temperaturökning.
9.1 Specifikationer Värden för primärspänning, sekundärspänning och primärström är redan bestämda i sekt. 8. Ett övergripande mål har varit att göra konstruktionen så liten och effektiv som möjligt och en förutsättning under projektet har varit att försöka göra en konstruktion som fungerar vid en switchfrekvens på 500Khz. Värden för verkningsgraden samt förhållandet mellan kopparförlusterna och uteffekten är satta enl. det följda beräkningsexemplet och värdet för maximal flödestäthet har bestämts efter omberäkningar. Värdet för fönsterutnyttjande är framtaget i [5] och gäller för rund tråd. Målet för temperaturstegringen och värdet för en lindning med mittavtappning är satta efter beräkningsexemplet. Sammanfattningen av specifikationerna blir
• enl. ekv.(0.37), primärspänning 5priV V= • enl. ekv.(0.39), sekundärspänning 20sekV V= • enl. ekv.(0.44), primärström 4.75priI A= • valt switchfrekvens 500f kHz= • målet för verkningsgrad 98%η = • antaget förhållande 0.5%α = enl. [5] mellan transformatorns kopparförluster och dess
uteffekt • bestämd maximal flödestäthet 0.034B T= • valt kärnmaterial 3F3 • enl. [5] antaget normaliserat fönsterutnyttjande för bobinkärnor 0.29uK = • Mål enl. [5] för temperaturstegring , 30rT C= °

sid. 15
• Då en lindning med mittavtappning används, enl. [5] 1.41U =
9.2 effekt Utmatad effekt utP från transformatorn
2 23ut pri priP I V Wη= ≈ (0.45)
Transformatorns skenbara uteffekt utS p.g.a. avbrutet strömflöde
33ut utS P U W= ≈ (0.46)
Transformatorns totala skenbara effekt totS
1.41 66uttot ut
PS S Wη
= + ≈ (0.47)
9.3 elektrisk och kärngeometrisk konstant Vågformskoffecienten 4fK = för en fyrkantsvåg. Den elektriska konstanten eK som bestäms av de magnetiska samt elektriska driftsförhållandena blir då
2 2 2 40.145 10 67048e fK K f B −= ⋅ = (0.48)
Konstanten gK för kärngeometrin beräknas enl.
3 51 102
totg
e
SK cmK α
−= ≈ ⋅ (0.49)
för att avnormaliserat gK multipliceras det enl. [5] med 1.35
3 51.35 10gK cm−= ⋅ (0.50)
9.4 kärna Man kan i tabell 3-43 i [5] se att kärnan RM-6 har ett värde 50.0044gK cm= och då den även förefaller vara tillgänglig från Farnell så väljs den för vidare beräkningar.
9.5 ledararea Enl. tabell 3-43 i [5] är areaprodukten 40.0953pA cm= för kärnan RM6. Strömdensiteten J blir då
2353 A/cmtot
f u p
SJK K BfA
= ≈ (0.51)
sid. 16
Enl. s.316 i [1] kan omvandlingsfaktorn D för en push-pull omvandlare maximalt vara 0.5 men bör väljas något lägre för att rymma en tid då båda switcharna är av. Väljer man maximalt 0.45D = så blir primärlindningsledarens minsta tvärsnittsarea priA
20.90pripri
I DA mm
J= ≈ (0.52)
sekundärströmmen sekI blir
1.2pri prisek
sek
V II A
Vη
= ≈ (0.53)
Sekundärlindningens minsta tvärsnittsarea sekA blir
20.22seksek
I DA mmJ
= ≈ (0.54)
9.6 Skineffekt Lindningstråden bör enl. [5] väljas så att dess likströms- och växelströmsmotstånd är lika vid den aktuella frekvensen 500f kHz= . Trådens radie ska då vara mindre än eller lika med aktuellt skindjup ε som kan beräknas enl. ekv. 4-5 i [5]
6.62 0.00936cmf
ε = ≈ (0.55)
Trådens maximala diameter trådd blir
2 0.19trådd mmε= ≈ (0.56)
Till primärlindningen har valts litztråd från ELFA som har arean 20.9mm och är uppbyggd av 90st. trådar som var och en har diametern 0.1mm. Till sekundärlindningen har en tråd med arean 20.15mm uppbyggd av 15st. trådar med diametern 0.1mm valts.
9.7 lindningsvarv Enl. tabell 3-43 i [5] har kärnan RM6 en kärnarea 20.366cA cm= . Primärlindningens antal varv priN på varje sida om avtappningen kan då beräknas till
410
2varvpripri
f c
VN
K BfA⋅
= ≈ (0.57)
Sekundärlindningens antal varv sekN på varje sida om avtappningen blir
1 8 var100
pri seksek
pri
N VN v
Vα = + ≈
(0.58)

sid. 17
9.8 Trådplacering Lindningarna lindas bifilar som beskrivs i sekt. 3.3.1. Den möjliga lindningsarean begränsas av bobinens innerdiameter och kärnans ytterkant och med ledning av trådarnas koppararea och kärnans samt bobinens mått kan man bilda sig en uppfattning av utrymmesmarginalen som visas i Fig. 12
Fig. 12, Trådplacering
9.9 lindningsförluster Resistiviteten är för koppar 1.72cu cmρ µ= Ω enl. tabell 4-7 i [5]. Den valda tråden till primärlindningen har arean 20.90priA mm= . Lindningsledarens motstånd _pri lR per längdenhet blir då
_ 191 /cupri l
pri
R u cmAρ
= ≈ Ω (0.59)
För kärnan RM4 är medellängden på ett lindningsvarv 3.1MLT cm= . Primärlindningens motstånd priR blir då
6_ 10 1.18pri pri pri lR MLT N R m−= ⋅ ⋅ ≈ Ω (0.60)
Den totala effekförlusten priP i de båda primärlindningarna blir
22 54pri pri priP I R mW= ≈ (0.61)
Den valda tråden till sekundärlindningen har arean 20.15sekA mm= . Lindningsledarens motstånd _sek lR per längdenhet blir då
_ 1147 /cusek l
sek
R u cmAρ
= ≈ Ω (0.62)
Sekundärlindningens motstånd sekR blir då
6_ 10 28sek sek sek lR MLT N R m−= ⋅ ⋅ ≈ Ω (0.63)
Den totala effektförlusten sekP i de båda sekundärlindningarna blir
22 79sek sek sekP I R mW= ≈ (0.64)

sid. 18
9.10 kärnförlust Kärnförlusten per vikt cvP enl. ekv.2-2 i [5]
m ncvP kf B= (0.65)
Genom att först ur tabell 2-6 i [5] se vilket av Magnetics material som motsvarar Ferroxcube 3F3 kan man sedan ur raden för material R vid frekvenser mellan 100kHz och 500kHz i tabell 2-14 i [5] utläsa koffecientvärdena 54.316 10k −= ⋅ , 1.64m = och 2.68n = . Kärnförlusten blir då
1.64 2.68 54.316 10 11 /cvP f B mW g−= ⋅ ≈ (0.66)
Man kan ur tabell tabell 3-43 i [5] utläsa att för kärnan RM6 är järnvikten 5.5tfeW g= . Den totala kärnförlusten cP blir då
310 61c cv tfeP P W mW−= ⋅ ≈ (0.67)
Transformatorns totala förlust trP blir
194tr c sek priP P P P mW= + + ≈ (0.68)
9.11 temperaturhöjning Man kan ur tabell tabell 3-43 i [5] utläsa att för kärnan RM6 blir ytarean 211.3tA cm= . Antal watt per enhetsarea ψ blir då
217 /tr
t
P mW cmA
ψ = ≈ (0.69)
Temperaturstegringen rT enl. s. 6-7 i [5] blir
0.826450 16rT Cψ= ≈ ° (0.70)
10 Strömtransformator För att mäta strömmen genom switchtransformatorns primärlindning har jag valt att linda en toroidkärna med en primärlindning på ett varv som kopplas enl. Fig. 13. Beräkningarna är gjorda med ledning av ett beräkningsexempel som börjar på sidan 16-9 i [5]
Fig. 13, Strömtransformator
sid. 19
Kretsen LM5030 är aktuell som switchcontroller för konstruktionen. I dess datablad [7] kan man läsa att kretsens två strömbegränsningsfunktioner triggas vid en spänning på 0.5V samt 0.625V. Då en maxström på 4.75A är beräknad så kan man tänka sig att kretsens första strömbegränsning ska aktiveras vid 5A och dess andra strömbegränsning som innebär ”nödstopp” aktiveras vid 6.25A. Vid ett exakt samband bör strömtransformatorkretsen i Fig. 13 leverera 0.625V vid en primärström på 6.25A. För att få en viss marginal och enkelt kunna justera utspänningen i efterhand kan man välja utspänningen utV till 1V vid 6.25A, vid ett linjärt samband blir den då 0.8V vid 5A och man får ca. 0.3V som man kan justera i efterhand för att kompensera variationer i diodspänningsfall och lindningsavvikelse.
10.1 Specifikationer Primärlindningen är bestämd till ett varv som fördelas så jämt som möjligt över en toroidkärna. Primärströmmen och utspänningen är bestämda till värden så att switchkontrollerns andra strömbegränsningssteg ska aktiveras med en viss marginal för justering. Belastningsmotståndet har ett lågt värde så att utsignalen får snabb respons på strömflödet. Arbetsfrekvensen blir lika som DC-DC omvandlarens switchfrekvens. Flödesdensiteten är vald så att kärnförlusten vid den aktuella frekvensen kan hållas under bestämt värde. Då kärnan är en toroidkärna kommer läckinduktansen enl. [5] bli minimal så kärnförlusten kommer till största delen orsaka skillnad mellan strömmen och utsignalen och värdet för denna valt efter vilken noggrannhet som bedöms nödvändig. Diodspänningsfallet är valt till ett rimligt värde för en switchdiod. Sammanfattningen av specifikationerna blir
• Primärlindningens antal varv 1priN = • Primärström 0 6.25priI A= − • Utspänning 1utV V= • Belastningsmotstånd 50utR = Ω • Arbetsfrekvens 500f kHz= • Flödesdensitet 0.05B T= • Kärnförlust (maximalt fel) 10%α ≤ • Diodspänningsfall 1dV V= • valt kärnmaterial 3F3 • Vågformsfaktor för fyrkantsvåg 4fK =
10.2 Sekundärström Sekundärströmmen sekI blir
0.02utsek
ut
VI AR
≈ = (0.71)
10.3 Sekundärlindning Sekundärlindningens antal sekN varv
313varpri prisek
sek
I NN v
I= ≈ (0.72)
sid. 20
10.4 kärnans tvärsnittsarea Sekundärspänningen sekV blir
2sek ut dV V V V= + = (0.73)
Kärnans tvärsnittsarea cA måste minst vara
20.00064sekc
f sek
VA cmK BfN
= ≈ (0.74)
Med ledning av beräkningarna kan toroidkärnan TN10/6/4 med enl. [9] en tvärsnittsarea 27.8cA mm= , inre och yttre diameter 5.2innerd mm= resp. 10.6ytterd mm= samt höjd
4.4h mm= väljas.
10.5 Lindningstråd Till primärlindningen på ett varv kan man välja samma litztråd med arean 20.9priA mm= som till switchtransformatorns primärlindning. Trådens diameter blir
2 1.07pripri
Ad mm
π= ≈ (0.75)
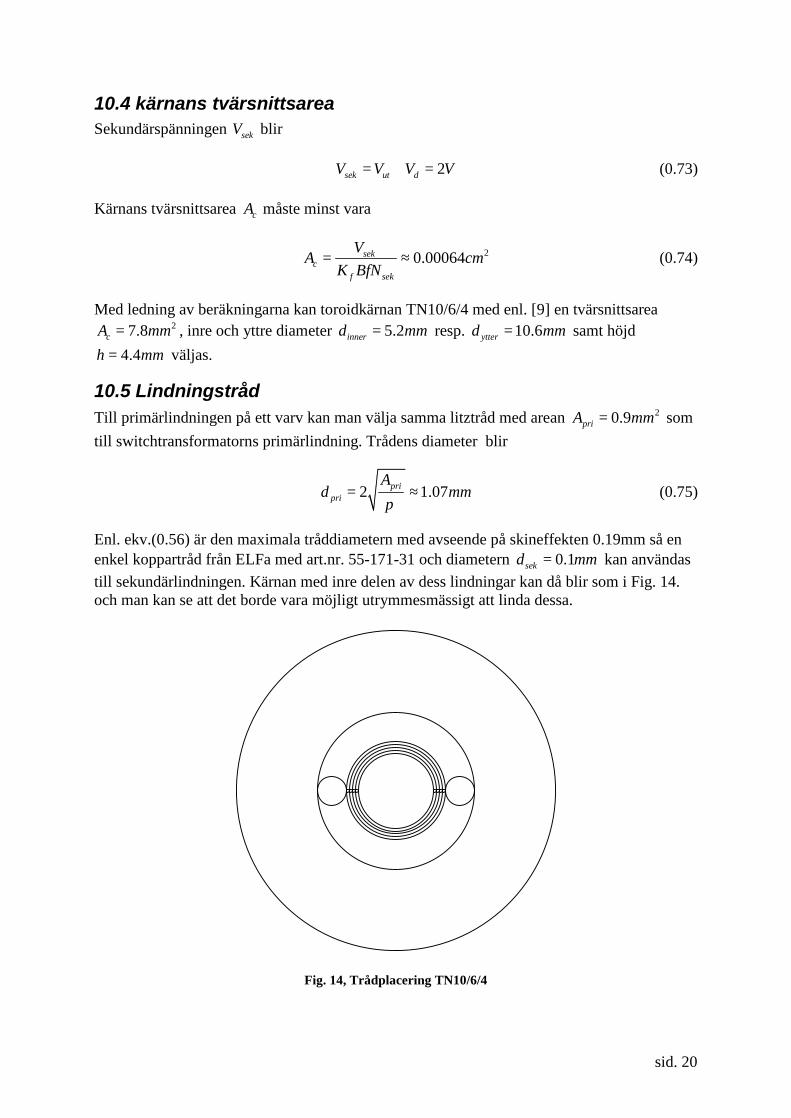
Enl. ekv.(0.56) är den maximala tråddiametern med avseende på skineffekten 0.19mm så en enkel koppartråd från ELFa med art.nr. 55-171-31 och diametern 0.1sekd mm= kan användas till sekundärlindningen. Kärnan med inre delen av dess lindningar kan då blir som i Fig. 14. och man kan se att det borde vara möjligt utrymmesmässigt att linda dessa.
Fig. 14, Trådplacering TN10/6/4

sid. 21
de olika sekundärlindningslagrens omkrets
( )( )( )( )
1
2
3
4
3.28 0.5 10
3.28 1.5 9.8
3.28 2.5 9.5
3.28 3.5 9.2
sek
sek
sek
sek
O d mm
O d mm
O d mm
O d mm
π
π
π
π
= − ≈
= − ≈
= − ≈
= − ≈
(0.76)
Antalet varv per lager blir
1 1
2 2
3 3
1 4
/ 100 var/ 98var/ 95 var/ 92 var
sek
sek
sek
sek
N O d vN O d vN O d vN O d v
= ≈= ≈
= ≈= ≈
(0.77)
Totalt antal varv totN man sammanlagt får plats med i dessa lager
1 2 3 4 385 vartotN N N N N v= + + + = (0.78)
Enl. ekv.(0.72) ska sekundärlindningen ha 313 varv så en viss marginal för ökat utrymmeskrav p.g.a. praktiska lindningssvårigheter finns.
10.6 sekundärlindningens motstånd Kärnans MLT kan enl. ekv. 4-24 i [5] uppskattas till
( )0.8 2 15.5ytterMLT d h mm= + ≈ (0.79)
sekundärlindningens trådarea sekA blir
2
3 27.85 104sek
sekdA mmπ −= ≈ ⋅ (0.80)
Beräknar man lindningsmotståndet per längdenhet som i ekv.(0.59) så får man
_ 21.9m /cusek l
sek
R cmAρ
= ≈ Ω (0.81)
Det totala ledningsmotståndet blir då
_ 10.4sek sek sek lR MLT N R= ⋅ ≈ Ω (0.82)

sid. 22
10.7 primärlindningens motstånd litztråden som bestämdes till primärlindningen har arean 20.9priA mm= . Lindningsmotståndet per längdenhet blir som i ekv. (0.81)
_ 191 /cupri l
pri
R cmAρ
µ= ≈ Ω (0.83)
Primärlindningens totala motstånd blir
_ 0.30pri pri pri lR MLT N R m= ⋅ ≈ Ω (0.84)
10.8 Uteffekt Uteffekten på sekundärsidan blir
( ) 40ut sek ut dP I V V mW= + ≈ (0.85)
Accepterbar kärnförlust
4100fe utP P mWα = ≈
(0.86)
Kärnan har enl. [9] en kärnvikt 0.95tfeW g≈ och en volym 3188V mm≈ . Dess densitet d blir då
3 35.053 10 /tfeWd g mm
V−= ≈ ⋅ (0.87)
Man kan få fram viktfaktorn WK genom att dela kärnans densitet med värdet för kisel ur tabell 2-1 i [5]
0.667.63w
dK = ≈ (0.88)
Kärnans effektiva kärnvikt blir
_ 0.63tfe eff tfe wW W K g= ≈ (0.89)
Tillåten kärnförlust / gram blir
3
_
10 6.4 /fe
tfe eff
PmW g
W⋅ ≈ (0.90)
sid. 23
10.9 värden för vald kärna Flödesdensitet B
_
0.41sek
f c core sek
VB mTK A fN
= ≈ (0.91)
På samma sätt som för switchtransformatorn kan man genom att först ur tabell 2-6 i [5] se vilket av Magnetics material som motsvarar Ferroxcube 3F3 och sedan ur raden för material R vid frekvenser mellan 100kHz och 500kHz i tabell 2-14 i [5] utläsa kofficientvärdena
54.316 10k −= ⋅ , 1.64m = och 2.68n = . Kärnförlusten per gram blir då
1.64 2.68 5_ 4.316 10 0.08 /fe gP f B mW g−= ⋅ ≈ (0.92)
kärnförlusten blir
_ _ 0.05fe tfe eff fe gP W P mW= ≈ (0.93)
fel orsakat av kärnförlusten blir
100 0.13%fe
ut
PP
⋅ ≈ (0.94)
10.10 temperaturhöjning Antar man 0.5dV V= och övriga enl. spec. så kan strömmen genom sekundärlindningen beräknas till
26sek dsek
ut sek
V VI mAR R
−= ≈
+ (0.95)
förlusten sekP i sekundärlindningen blir
2 7sek sek sekP I R mW= ≈ (0.96)
Förlusten priP i primärlindningen kan beräknas till
2 15pri pri priP I R mW= ≈ (0.97)
Transformatorns totala förlust blir
27tr pri sek feP P P P mW= + + = (0.98)

sid. 24
Transformatorns ytarea 25.6tA cm= kan utläsas ur tabell 3-55 i [5] där toroid nr. 55041 enl. tabell 3-54 har liknande dimensioner som den valda toroiden. Antal watt per enhetsarea ψ blir då
24.8 /tr
t
P mW cmA
ψ = ≈ (0.99)
Temperaturstegringen rT blir
0.826450 5.5rT Cψ= ≈ ° (0.100)
11 Switchtransistor I denna konstruktion enl. push-pull topologin kommer spänningen över varje switchtransistor att vara dubbla inspänningen. Då den maximala inspänningen enl. sekt. 7.4 kommer vara ca. 47.3V måste transistorerna klara minst 100V. Samtidigt bör de ha lågt på-motstånd och vara snabba för att leda strömpulserna genom primärlindningen utan för stora förluster. Jag har valt att prova med transistor IRL2910 och försökt uppskatta dess förluster. Transistorns arbetsområde går enl. databladet up till 175 grader, antar man att omgivningstemperaturen är ca 25 grader så kommer enl. beräkningarna transistorn att hålla en arbetstemperatur på 100-110 grader utan extra kylning och man kan spara utrymme samt kostnad för kylflänsar.
11.1.1 Switchförlust Strömmen priI är bestämd i sekt. 8.1.2 till ca. 2.4A och inspänningen i sekt. 8.1.1 till 5V så spänningen V över switchen blir 10V. Då transistor IRL2910 enl. [6] har stigtiden
100rt ns= och falltiden 55ft ns= så blir enl. ekv. 2-6 i [1] switchförlusten swP
( )0.5 930sw pri r fP VI f t t mW= + ≈ (0.101)
11.1.2 ledförlust Enl. [6] har transistorn vid 25 C° ett på-motstånd ( )25 0.04DS onR = Ω . Antar man att transistorns arbetstemperatur blir 80 C° så blir på-motståndet enl. diagram i [6]
( )80 ( )251.6 0.064DS on DS onR R≈ = Ω (0.102)
Ledförlusten ledP kan då beräknas till
2( )80 369led pri DS onP I R mW= ≈ (0.103)
11.1.3 Totalförlust Den totala förlusten switchP för en switchtransistor blir
1.3switch sw ledP P P W= + ≈ (0.104)
sid. 25
11.1.4 temperaturhöjning Enl. [6] har transistorn en TO220 kapsling med det termiska motståndet 62 /JAR C Wθ = ° mellan kiselövergången och kapselns omgivning. Kiselövergångens temperaturökning kan då enl. ekv. 29-5 i [1] beräknas till
81j switch JAT P R Cθ= ≈ ° (0.105)
12 Ingångskondensator Switchtransistorerna bör matas från en kondensator som är kapabel att leverera de strömpulser som uppstår. Vid switchfrekvensen kommer kondensatorns ekvivalenta serieresistans ESR vara den begränsande faktorn för hur hög ström och hur snabbt kondensatorn kommer svara på strömpulserna. ESR kommer även orsaka förluster i kondensatorn. Ett sätt att uppfylla ESR-målet är att parallellkoppla flera relativt stora kondensatorer, man får då en onödigt stor kapacitans och en del utrymme tas i anspråk men å andra sidan behöver man ej använda specialkondensatorer.
Bestämmer man inspänningens maximala rippel till 1% så blir spänningsvariationen
0.01 50priV mV=
Rippelspänningen kommer bero på kondensatorns kapacitans och ESR. Man kan tänka sig att ripplet ska fördelas enligt
_ _6ripp ESR ripp CV V= (0.106)
Ripplet _ripp CV beroende på kapacitansen blir då
_0.05 8
6ripp CV mV= ≈ (0.107)
Den från kondensatorn upplevda lasten lastR kan beräknas som
prilast
pri
VR
I= (0.108)
Enl. ekv. 5-50 i [1] så kan spänningens förändringshastighet /pridV dt beräknas som
1pripri
in last
dVV
dt C R= − (0.109)
Den effektiva switchperioden 1/ sf blir hälften så lång för kondensatorn som för vardera transistor och transformatorn. Spänningens förändringshastighet /pridV dt över kondensatorn kan då uttryckas som rippelamplituden per halv switchperiod
( )
__1 2
2pri ripp C
ripp C
dV VV f
dt f −= = (0.110)
sid. 26
sätter man in ekv. (0.108) och (0.110) i (0.109) så kan man beräkna
_
6002
priin
ripp C last
VC F
V fRµ= ≈ (0.111)
ripplet _ripp ESRV beroende på kondensatorns ESR får max bli
_ _6 48ripp ESR ripp CV V mV= = (0.112)
Enl. ekv. 10-20 i [1] ska man nu välja kondensator så att
_ 10ripp ESR
pri
VESR m
I= ≈ Ω (0.113)
Väljer man att parallellkoppla 3st. elektrolytkondensatorer med 330C Fµ= ,
100 28kHzESR m= Ω och 50V V= så kan rippelspänningen beroende på ESR uppskattas till
_ 443
priripp ESR
I ESRV mV
⋅= ≈ (0.114)
Rippelspänningen _ripp CV blir i sin tur enl. ekv. (0.111) ca. 4.8mV och det totala ripplet blir
_ _ 48.8ripp C ripp ESRV V mV+ = . Varje kondensators förlust kan uppskattas till
( )2
_ _ 85ripp C ripp ESRV VmW
ESR+
≈ (0.115)
Den totala förlusten i inkondensatorerna blir då 3 85 255mW⋅ = .
13 Likriktardioder Likriktardioderna på sekundärsidan bör ha ett lågt framspänningsfall samt vara snabba nog så kortslutning genom att båda dioderna under ett ögonblick leder samtidigt undviks. Framspänningsfallet, samt tiden som flyter då dioden är i övergång mellan ledande och icke ledande orsakar även förluster.
13.1.1 ledförlust Sekundärspänningen sekV är beräknad i sekt. 8.1.1 till 20V och sekundärströmmen i sekt. 9.5 till 1.2A. Förlusten för varje likriktardiod består av ledförlust samt switchförlust. Shottkydiod 31DQ05 har enl. [7] vid strömmen 1.2sekI A= och temperaturen 80 C° data: 50RRMV V= ,
0.45FV V≈ , 1.5FI A≈ och / 10 /dv dt V ns= . ledförlusten DledP för en diod blir
( ) 2702sek
Dled F sek rms FIP V I V mW= = ≈ (0.116)
sid. 27
13.1.2 Switchförlust Switchförlusterna DswP i en diod blir
1 122 /
sekDsw sek sek
VP V I f mWdv dt
= ≈ (0.117)
13.1.3 totalförlust Den totala förlusten DP för en diod blir
282D Dled DswP P P mW= + ≈ (0.118)
13.1.4 temperaturhöjning Enl. [7] har dioden det termiska motståndet 80 /thJAR C W= ° mellan kiselövergången och kapselns omgivning. Kiselövergångens temperaturökning kan då enl. ekv. 29-5 i [1] beräknas till
23j D thJAT P R C= ≈ ° (0.119)
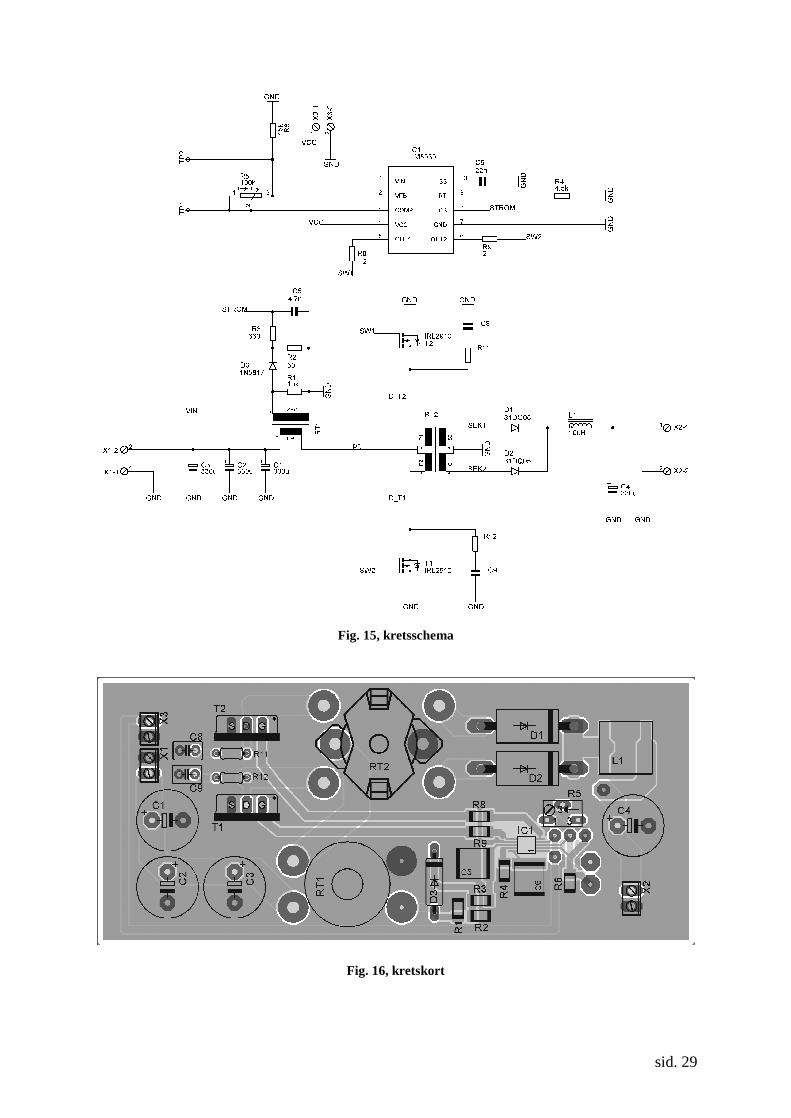
14 Praktiskt genomförande Efter att de tidigare beskrivna komponenterna valts och switch- samt strömtransformatorn lindats så har jag m.h.a. OrCAD Capture och pspice gjort grundläggande simuleringsmodeller som jag simulerat för att verifiera kretsens funktionen. Då jag känt mig nöjd med simuleringsresultatet har jag sökt efter och beställt komponenter samt formgivit ett kretskort i EagleCAD. Fig. 15 och Fig. 16 visar de sammanhängande kretsschemat och kretskortet. Efter att kretskortet monterats har jag provkört och gjort mätningar och en del av dessa har använts för att förbättra simuleringsmodellen.
14.1 komponenter Motståndet R4 bestämmer kretsens switchfrekvens, R5 och R6 används för att ställa in och justera pulsbredden. Switchtransistorerna T1 och T2 är kopplade till kretsens via motstånden R8 och R9 som begränsar de kapacitiva strömspikarna. PWM-kretsens strömbegränsningsfunktioner är anslutna till strömtransformatorn RT1 via D3 som likriktar signalen. R3 och C5 som sitter nära kretsen ska filtrera bort störningar. Inspänningen är ansluten till switchtransformatorn RT2 via de tre kondensatorerna C1, C2 och C3 som ska vara laddningsreserv för switcharna. R11, C8 och R12, C9 utgör snubberkretsar till resp. switch. D1 och D2 likriktar utspänningen som sedan filtreras genom L1 och C4.
14.2 layout Kretskortet är gjort med sammanhängande jordplan på ovan- och undersidan, jag har försökt att separera PWM-kretsen och de kringliggande delar som bär små signaler från de delar på kretskortet som bär höga och snabba strömmar. Som resultat av detta blev ledarna till transistorernas gate långa men då dessa signaler switchar mellan noll och pwm-kretsens matningsspänning bedömde jag att signalerna endast i liten grad påverkas av störningar. Dock gör deras längd att de får en viss induktans och det korta avståndet till jordplanet att de får en kapacitiv koppling dit. Även matningsspänningen till PWM-kretsen blev lång och dess induktans kan påverka PWM-kretsens förmåga att driva transistorernas gatekapacitanser.
sid. 28
14.3 ledarinduktans och kapacitans I [12] beskrivs hur man kan beräkna induktansen för en ledningsbana på ett kretskort samt kapacitansen till omtillliggande ledningsbanor eller jordplan.
Då man känner ledarens bredd W , dess tjocklek H och dess längd l så kan induktansen L beräknas enl. ekv. 2 i [12] , där anges att man får resultatet i uH om måtten anges i mm.
20.0002 ln 0.2235 0.5l W HL lW H l
+ = + + + (0.120)
Ledarens kapacitans C till jordplanet kan m.h.a. ledarens area A och avståndet d beräknas enl.
ACd
ε= (0.121)
Permittiviteten ε beräknas m.h.a. den absoluta permittiviteten 120 8.85 10 /F mε −≈ ⋅ och
materialets relativa permittivitet rε enl.
0 rε ε ε= (0.122)
Man kan tänka sig två fall, kapacitans mellan ledaren och jordplanet på samma sida eller mellan ledaren och jordplanet på kretskortets motsatta sida. I första fallet är det luft mellan ytorna så 1rε = , ledarens area blir kopparfoliens tjocklek på 35 mµ gånger ledarens dubbla längd och avståndet mellan ytorna är 0.3mm. I det andra fallet finns kretskortet mellan ytorna. Materialet har angetts vara FR4 med den relativa permittiviteten 4.5rε ≈ , ledarens area blir dess bredd gånger längden och avståndet är laminatets tjocklek på 1.6mm.
Det har visat sig att kapacitansen i första fallet för det mesta blir försumbar jämfört med kapacitansen genom kretskortslaminatet så endast den har beräknats. Induktansen och kapacitansen är beräknade och redovisade i Tabell 1 för signalerna SW1, SW2, D_T1, D_T2, PRI, SEK1 och SEK2 som kan ses i Fig. 15. Jag har bedömt att de leder hög frekvens samt riskerar att ha betydande induktans- och kapacitansvärden. I Fig. 16 kan man se att flera ledare har samma utformning så där har beräkningar endast gjorts för en av dem.
Signal Induktans(nH) Kapacitans(pF) SW1, SW2 48 3 D_T1, D_T2 6 2 SEK1, SEK2 4 1 VCC 144 6 PRI 15 5
Tabell 1, ledarinduktanser och kapacitanser
sid. 29
Fig. 15, kretsschema
Fig. 16, kretskort
sid. 30
14.4 provkörning och mätning För att ej riskera att transistorernas maxspänning överskrids av överspänningar orsakade av switchtransformatorns läckinduktans som beskrivs i sekt. 3.3.3 har de första provkörningarna skett vid låg inspänning och för att ej belasta komponenterna har låg belastning anslutits. För att undvika eventuella felkällor har även pwm-kretsens strömbegränsningsfunktion satts ur funktion och labratorieaggregatens strömbegränsning har använts.
14.4.1 problem Två problem visade sig omgående, switchtransistorerna som främst valdes för deras låga på-motstånd och ledförlust samt den relativt höga arbetsspänningen belastar pwm-kretsen så pass att dess överhettnings-skyddsfunkton aktiveras. Det andra problemet var att likriktardioderna snabbt blev varma trots den låga belastningen. Även dessa valdes med tanke på lågt framspänningsfall och låga ledförluster och troligen så var dessa för långsamma och till följd av detta så ledde de ström samtidigt under en kort stund av varje switchperiod.
För att ordna problemet med PWM-kretsens överhettning har switchtransistorerna bytts ut mot IRF530 som klarar samma arbetsspänning, har ca. 2.5ggr högre på-motstånd men endast ca. en 1/5 så stor gatekapacitans. Det visade sig dock att dessa blev varmare än de ursprungliga transistorerna och troligen kommer kräva någon form av kylning. Ett alternativt sätt att lösa problemet har kunnat vara att behålla de ursprungliga transistorerna och installerat en yttre drivkrets med högre strömspecifikationer efter pwm-kretsen.
Enklaste lösningen på de varma likriktardioderna var att de togs bort och med undantag för de sista mätningarna belastades switchtransformatorns sekundärlindningar direkt. Dioderna byttes slutligen ut mot switchdiod 8ETH06 med högre ledmotstånd men lägre kapacitans som upplevs svala vid låg belastning och troligen är ett bättre val.
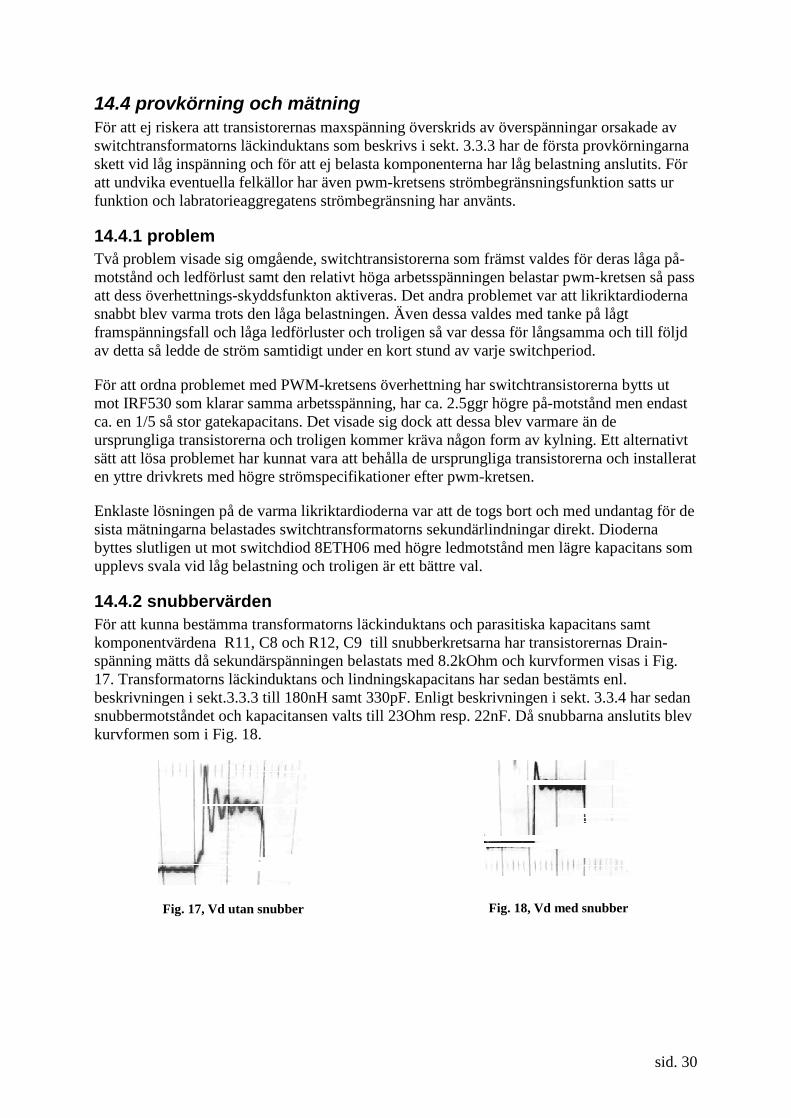
14.4.2 snubbervärden För att kunna bestämma transformatorns läckinduktans och parasitiska kapacitans samt komponentvärdena R11, C8 och R12, C9 till snubberkretsarna har transistorernas Drain-spänning mätts då sekundärspänningen belastats med 8.2kOhm och kurvformen visas i Fig. 17. Transformatorns läckinduktans och lindningskapacitans har sedan bestämts enl. beskrivningen i sekt.3.3.3 till 180nH samt 330pF. Enligt beskrivningen i sekt. 3.3.4 har sedan snubbermotståndet och kapacitansen valts till 23Ohm resp. 22nF. Då snubbarna anslutits blev kurvformen som i Fig. 18.
Fig. 17, Vd utan snubber
Fig. 18, Vd med snubber
sid. 31
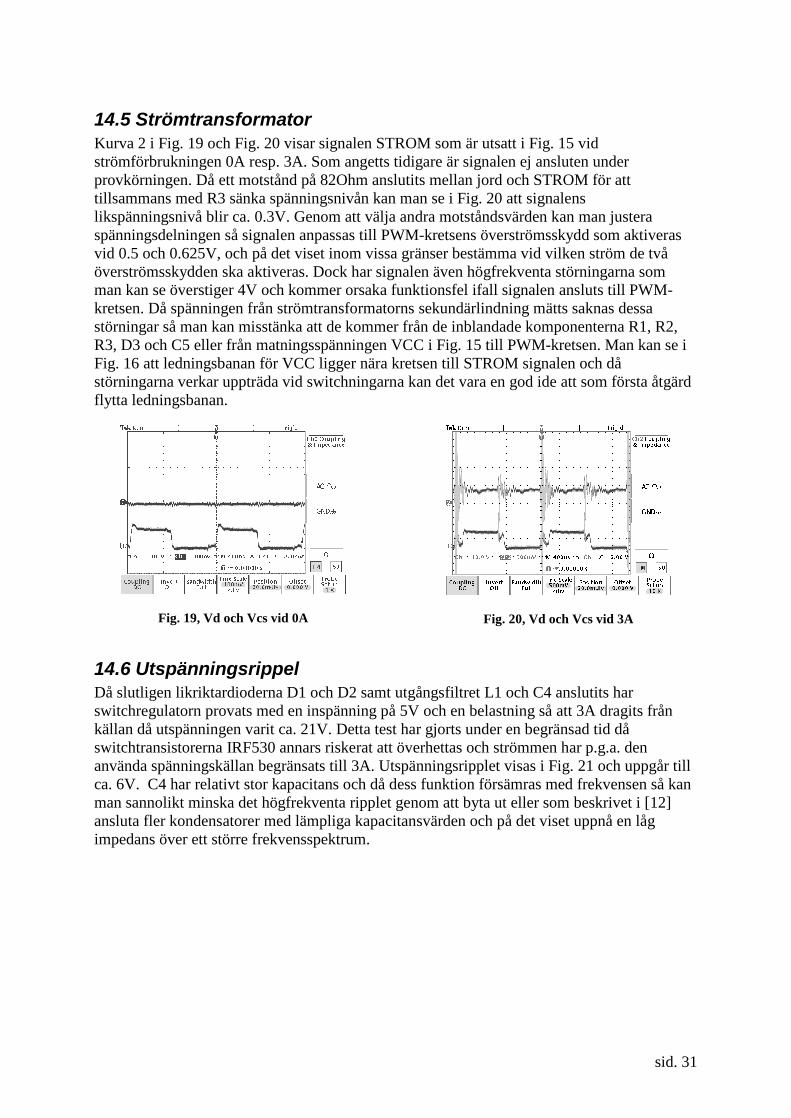
14.5 Strömtransformator Kurva 2 i Fig. 19 och Fig. 20 visar signalen STROM som är utsatt i Fig. 15 vid strömförbrukningen 0A resp. 3A. Som angetts tidigare är signalen ej ansluten under provkörningen. Då ett motstånd på 82Ohm anslutits mellan jord och STROM för att tillsammans med R3 sänka spänningsnivån kan man se i Fig. 20 att signalens likspänningsnivå blir ca. 0.3V. Genom att välja andra motståndsvärden kan man justera spänningsdelningen så signalen anpassas till PWM-kretsens överströmsskydd som aktiveras vid 0.5 och 0.625V, och på det viset inom vissa gränser bestämma vid vilken ström de två överströmsskydden ska aktiveras. Dock har signalen även högfrekventa störningarna som man kan se överstiger 4V och kommer orsaka funktionsfel ifall signalen ansluts till PWM-kretsen. Då spänningen från strömtransformatorns sekundärlindning mätts saknas dessa störningar så man kan misstänka att de kommer från de inblandade komponenterna R1, R2, R3, D3 och C5 eller från matningsspänningen VCC i Fig. 15 till PWM-kretsen. Man kan se i Fig. 16 att ledningsbanan för VCC ligger nära kretsen till STROM signalen och då störningarna verkar uppträda vid switchningarna kan det vara en god ide att som första åtgärd flytta ledningsbanan.
Fig. 19, Vd och Vcs vid 0A
Fig. 20, Vd och Vcs vid 3A
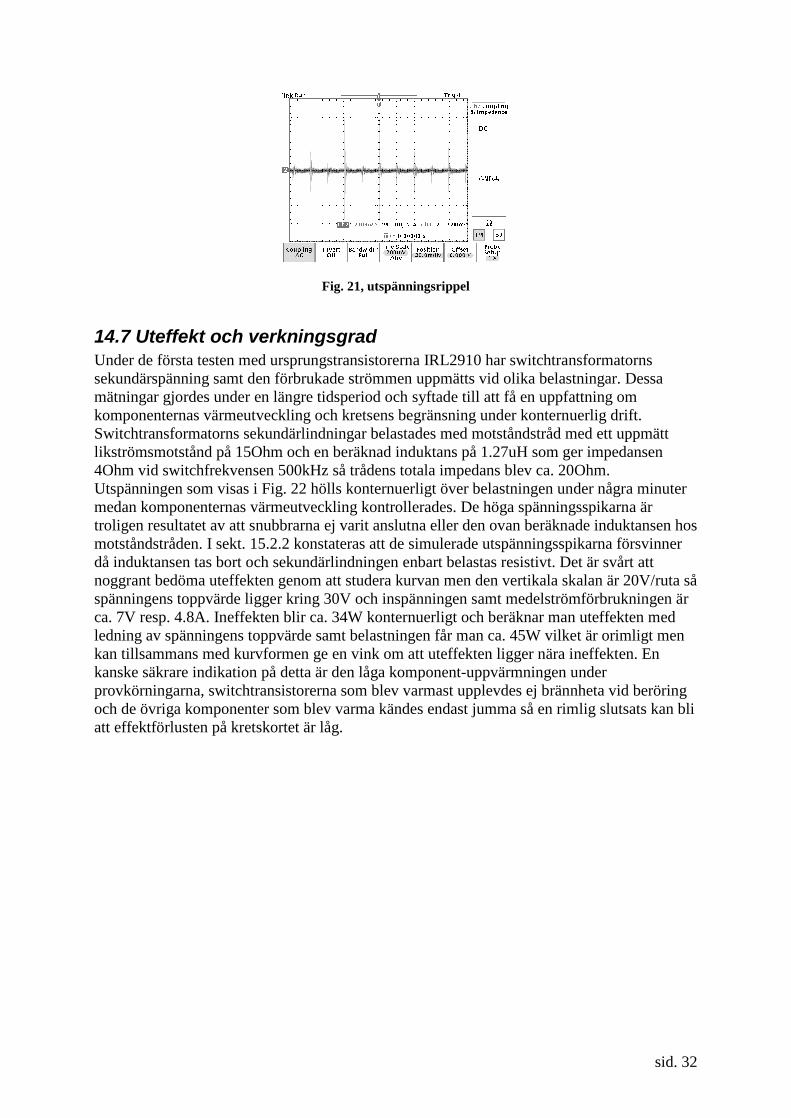
14.6 Utspänningsrippel Då slutligen likriktardioderna D1 och D2 samt utgångsfiltret L1 och C4 anslutits har switchregulatorn provats med en inspänning på 5V och en belastning så att 3A dragits från källan då utspänningen varit ca. 21V. Detta test har gjorts under en begränsad tid då switchtransistorerna IRF530 annars riskerat att överhettas och strömmen har p.g.a. den använda spänningskällan begränsats till 3A. Utspänningsripplet visas i Fig. 21 och uppgår till ca. 6V. C4 har relativt stor kapacitans och då dess funktion försämras med frekvensen så kan man sannolikt minska det högfrekventa ripplet genom att byta ut eller som beskrivet i [12] ansluta fler kondensatorer med lämpliga kapacitansvärden och på det viset uppnå en låg impedans över ett större frekvensspektrum.
sid. 32
Fig. 21, utspänningsrippel
14.7 Uteffekt och verkningsgrad Under de första testen med ursprungstransistorerna IRL2910 har switchtransformatorns sekundärspänning samt den förbrukade strömmen uppmätts vid olika belastningar. Dessa mätningar gjordes under en längre tidsperiod och syftade till att få en uppfattning om komponenternas värmeutveckling och kretsens begränsning under konternuerlig drift. Switchtransformatorns sekundärlindningar belastades med motståndstråd med ett uppmätt likströmsmotstånd på 15Ohm och en beräknad induktans på 1.27uH som ger impedansen 4Ohm vid switchfrekvensen 500kHz så trådens totala impedans blev ca. 20Ohm. Utspänningen som visas i Fig. 22 hölls konternuerligt över belastningen under några minuter medan komponenternas värmeutveckling kontrollerades. De höga spänningsspikarna är troligen resultatet av att snubbrarna ej varit anslutna eller den ovan beräknade induktansen hos motståndstråden. I sekt. 15.2.2 konstateras att de simulerade utspänningsspikarna försvinner då induktansen tas bort och sekundärlindningen enbart belastas resistivt. Det är svårt att noggrant bedöma uteffekten genom att studera kurvan men den vertikala skalan är 20V/ruta så spänningens toppvärde ligger kring 30V och inspänningen samt medelströmförbrukningen är ca. 7V resp. 4.8A. Ineffekten blir ca. 34W konternuerligt och beräknar man uteffekten med ledning av spänningens toppvärde samt belastningen får man ca. 45W vilket är orimligt men kan tillsammans med kurvformen ge en vink om att uteffekten ligger nära ineffekten. En kanske säkrare indikation på detta är den låga komponent-uppvärmningen under provkörningarna, switchtransistorerna som blev varmast upplevdes ej brännheta vid beröring och de övriga komponenter som blev varma kändes endast jumma så en rimlig slutsats kan bli att effektförlusten på kretskortet är låg.

sid. 33
Fig. 22, sekundärspänning
Under mätningar med snubbrarna inkopplade visade det sig att strömförbrukningen ökade med inspänningen även då utspänningen är obelastad. Detta kommer innebära att kretsens verkningsgrad sjunker och mindre energi kommer lagras då motorn har hög rotationshastighet. Det är med anledning av detta förhållande som möjligheten att använda LCD snubber som i mindre grad förbrukar energi undersökts.
15 Simulering
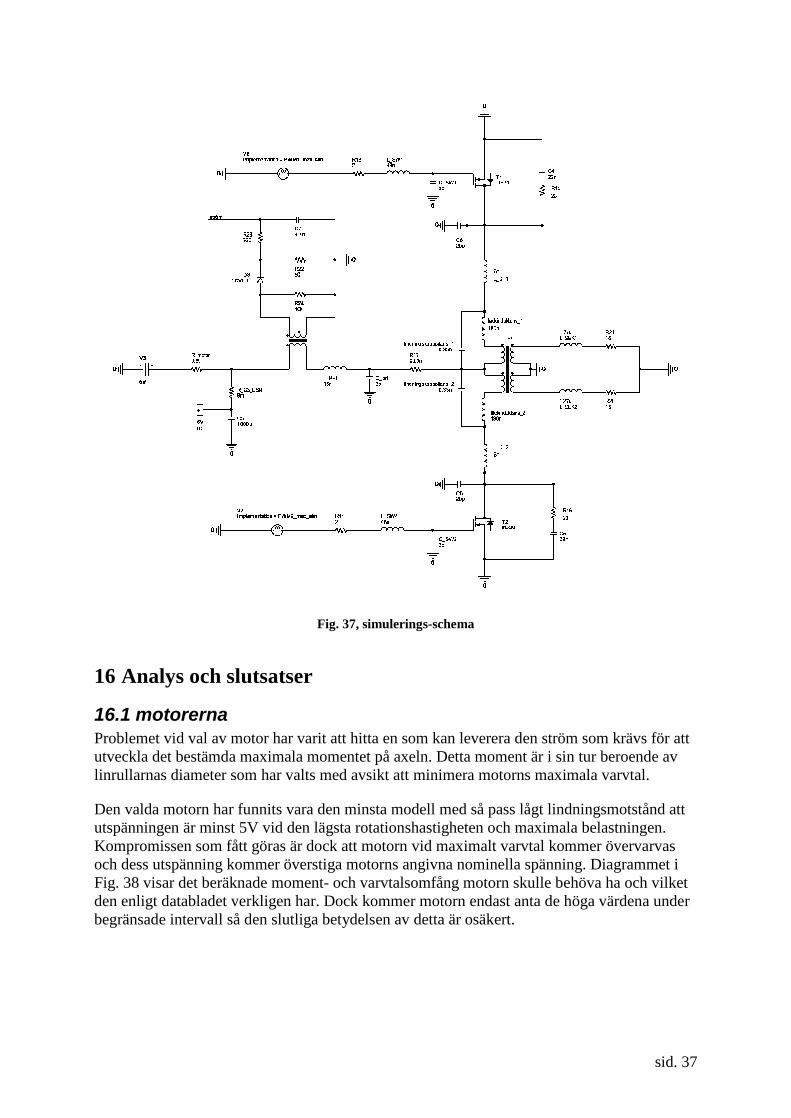
15.1 komponenter Som tidigare nämts har de praktiska provkörningarna och simuleringar skett parallellt under arbetets gång för att möjliggöra justering av simulerings-schemat som visas i Fig. 37.
Spänningskällan V3 och motståndet R_motor föreställer spänningen som induceras i motorn och motorns lindningsmotstånd. C3, IC och R_C3_ESR är kondensatorerna beskrivna i sekt. 12 och deras beräknade ekvivalenta seriemotstånd ESR, IC sätter kondensatorns startspänning till samma som inspänningen. Då simulationen sker med tidsskalan anpassad efter switchfrekvensen kommer annars uppladdningen av den stora C3 att kräva onödigt långa simuleringar och vara opraktiskt eller rent av omöjligt.
U5, R24, D3, R22, R330 och C7 är strömtransformatorn och kretsen som likriktar och filtrerar spänningen ström som ska vara ansluten till PWM-kretsens strömbegränsningsfunktion och motsvara strömförbrukningen.
L_pri, C_pri, L_DT1, L_DT2, L_SW1, C_SW1, L_SW2, och C_SW2 ska motsvara kapacitanserna och induktanserna som beräknats i sekt. 14.3 för de respektive kopparbanorna. Värdena är redovisade i Tabell 1.
Runt switchtransformatorn U2 sitter lindningskapacitanserna samt läckinduktanserna som bestämts i sekt. 14.4.2.
sid. 34
L_SEK1 och L_SEK2 motsvarar kopparbanornas indukanser men främst induktansen hos motståndstrådarna som användes till att belasta sekundärspänningen.
V6 och V7 genererar switchpulser som ska motsvara de som kommer från PWM-kretsen.
R17, C6 och C8 är ditsatta för att reducera snabba förlopp och förbättra kretsens simulerbarhet.
15.2 resultat
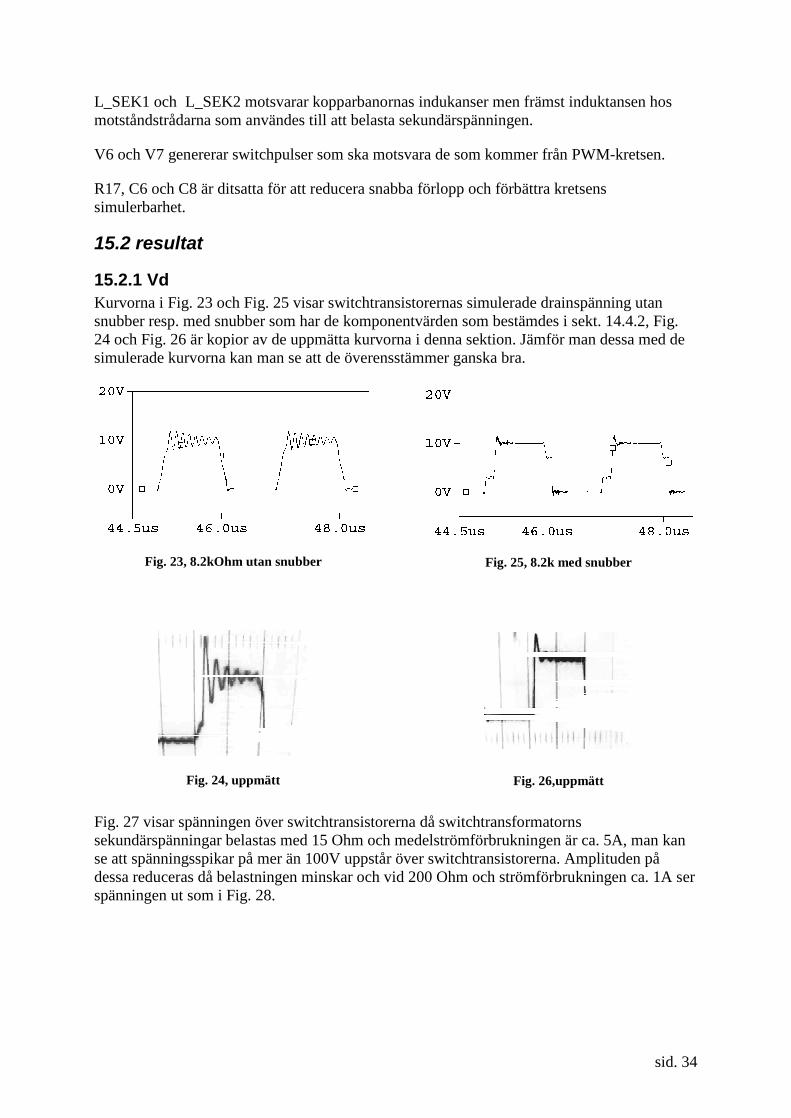
15.2.1 Vd Kurvorna i Fig. 23 och Fig. 25 visar switchtransistorernas simulerade drainspänning utan snubber resp. med snubber som har de komponentvärden som bestämdes i sekt. 14.4.2, Fig. 24 och Fig. 26 är kopior av de uppmätta kurvorna i denna sektion. Jämför man dessa med de simulerade kurvorna kan man se att de överensstämmer ganska bra.
Fig. 23, 8.2kOhm utan snubber
Fig. 24, uppmätt
Fig. 25, 8.2k med snubber
Fig. 26,uppmätt
Fig. 27 visar spänningen över switchtransistorerna då switchtransformatorns sekundärspänningar belastas med 15 Ohm och medelströmförbrukningen är ca. 5A, man kan se att spänningsspikar på mer än 100V uppstår över switchtransistorerna. Amplituden på dessa reduceras då belastningen minskar och vid 200 Ohm och strömförbrukningen ca. 1A ser spänningen ut som i Fig. 28.
sid. 35
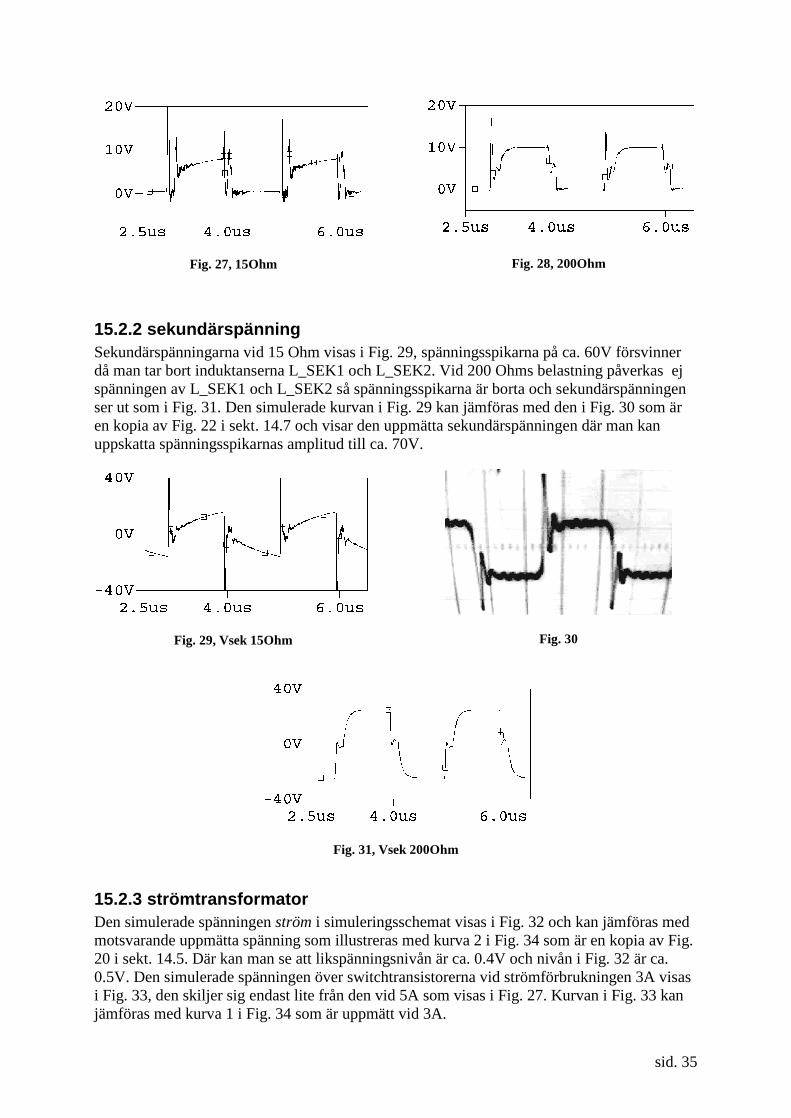
Fig. 27, 15Ohm
Fig. 28, 200Ohm
15.2.2 sekundärspänning Sekundärspänningarna vid 15 Ohm visas i Fig. 29, spänningsspikarna på ca. 60V försvinner då man tar bort induktanserna L_SEK1 och L_SEK2. Vid 200 Ohms belastning påverkas ej spänningen av L_SEK1 och L_SEK2 så spänningsspikarna är borta och sekundärspänningen ser ut som i Fig. 31. Den simulerade kurvan i Fig. 29 kan jämföras med den i Fig. 30 som är en kopia av Fig. 22 i sekt. 14.7 och visar den uppmätta sekundärspänningen där man kan uppskatta spänningsspikarnas amplitud till ca. 70V.
Fig. 29, Vsek 15Ohm
Fig. 30
Fig. 31, Vsek 200Ohm
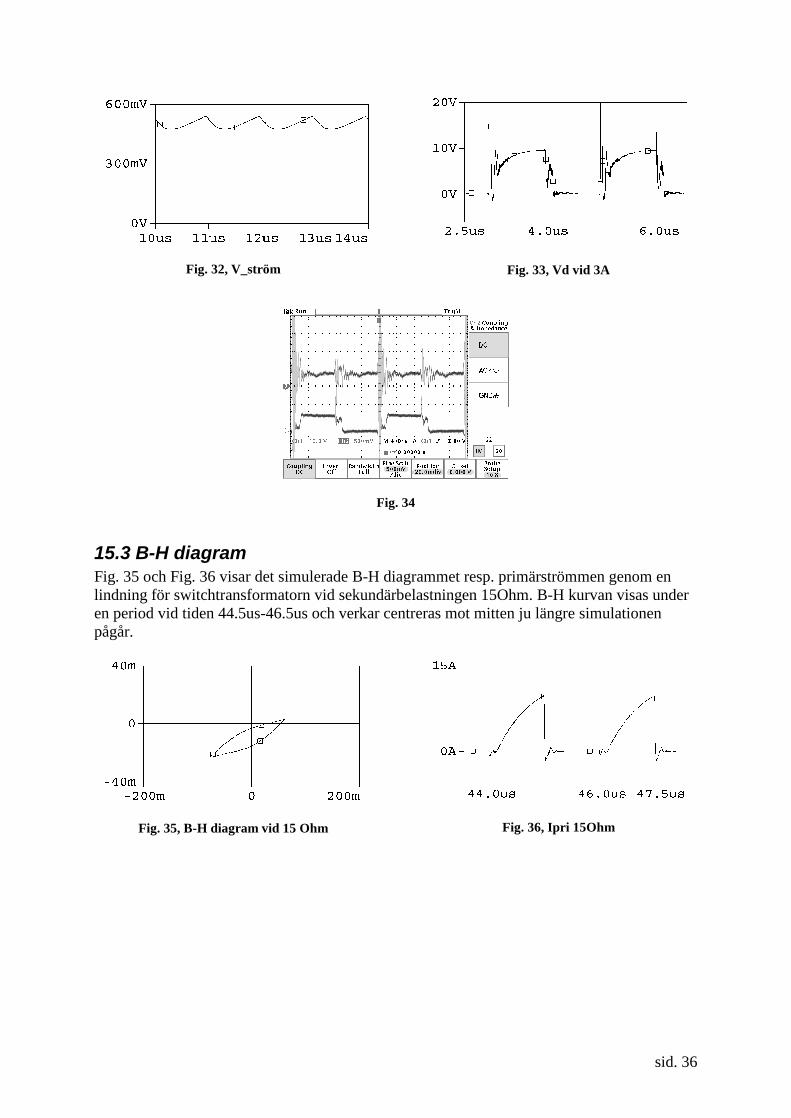
15.2.3 strömtransformator Den simulerade spänningen ström i simuleringsschemat visas i Fig. 32 och kan jämföras med motsvarande uppmätta spänning som illustreras med kurva 2 i Fig. 34 som är en kopia av Fig. 20 i sekt. 14.5. Där kan man se att likspänningsnivån är ca. 0.4V och nivån i Fig. 32 är ca. 0.5V. Den simulerade spänningen över switchtransistorerna vid strömförbrukningen 3A visas i Fig. 33, den skiljer sig endast lite från den vid 5A som visas i Fig. 27. Kurvan i Fig. 33 kan jämföras med kurva 1 i Fig. 34 som är uppmätt vid 3A.
sid. 36
Fig. 32, V_ström
Fig. 33, Vd vid 3A
Fig. 34
15.3 B-H diagram Fig. 35 och Fig. 36 visar det simulerade B-H diagrammet resp. primärströmmen genom en lindning för switchtransformatorn vid sekundärbelastningen 15Ohm. B-H kurvan visas under en period vid tiden 44.5us-46.5us och verkar centreras mot mitten ju längre simulationen pågår.
Fig. 35, B-H diagram vid 15 Ohm
Fig. 36, Ipri 15Ohm
sid. 37
Fig. 37, simulerings-schema
16 Analys och slutsatser
16.1 motorerna Problemet vid val av motor har varit att hitta en som kan leverera den ström som krävs för att utveckla det bestämda maximala momentet på axeln. Detta moment är i sin tur beroende av linrullarnas diameter som har valts med avsikt att minimera motorns maximala varvtal.
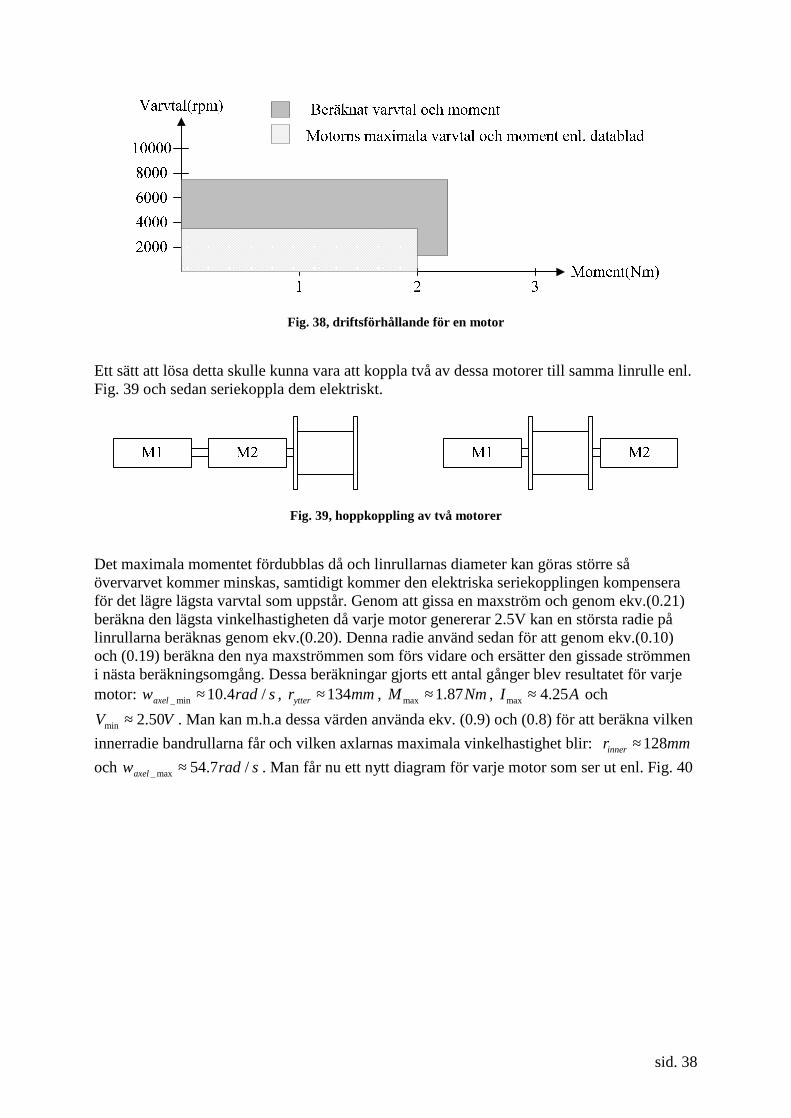
Den valda motorn har funnits vara den minsta modell med så pass lågt lindningsmotstånd att utspänningen är minst 5V vid den lägsta rotationshastigheten och maximala belastningen. Kompromissen som fått göras är dock att motorn vid maximalt varvtal kommer övervarvas och dess utspänning kommer överstiga motorns angivna nominella spänning. Diagrammet i Fig. 38 visar det beräknade moment- och varvtalsomfång motorn skulle behöva ha och vilket den enligt databladet verkligen har. Dock kommer motorn endast anta de höga värdena under begränsade intervall så den slutliga betydelsen av detta är osäkert.
sid. 38
Fig. 38, driftsförhållande för en motor
Ett sätt att lösa detta skulle kunna vara att koppla två av dessa motorer till samma linrulle enl. Fig. 39 och sedan seriekoppla dem elektriskt.
Fig. 39, hoppkoppling av två motorer
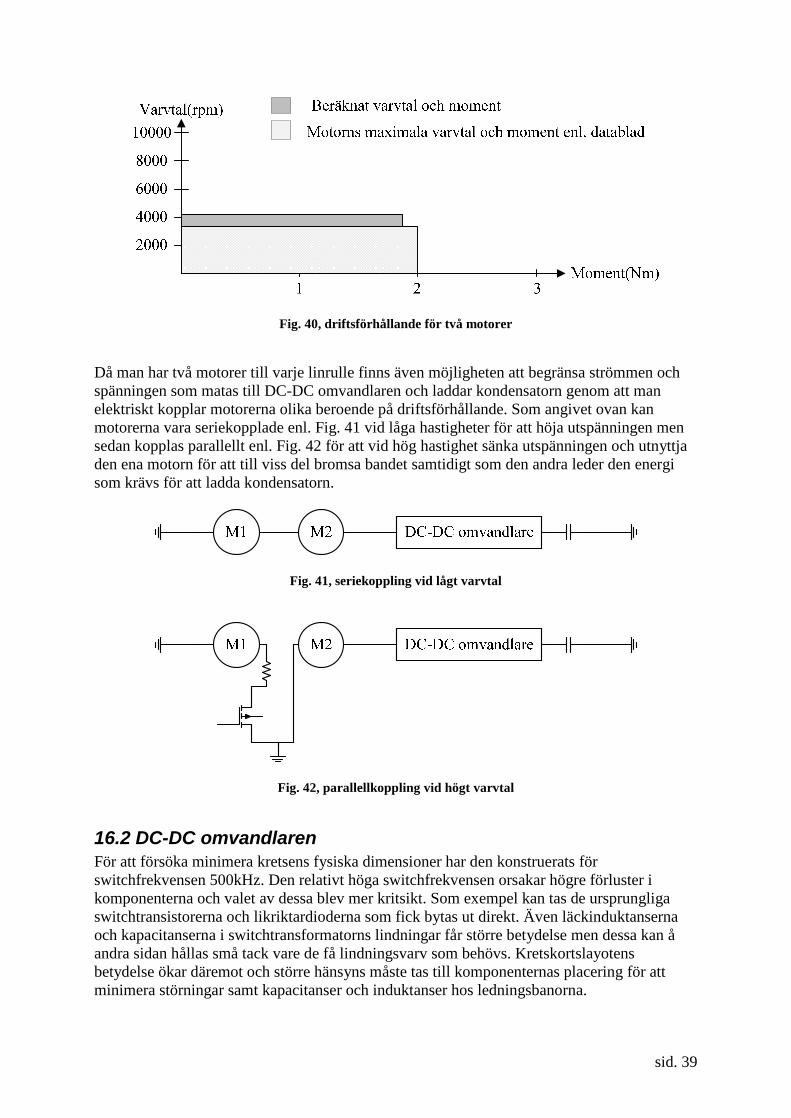
Det maximala momentet fördubblas då och linrullarnas diameter kan göras större så övervarvet kommer minskas, samtidigt kommer den elektriska seriekopplingen kompensera för det lägre lägsta varvtal som uppstår. Genom att gissa en maxström och genom ekv.(0.21) beräkna den lägsta vinkelhastigheten då varje motor genererar 2.5V kan en största radie på linrullarna beräknas genom ekv.(0.20). Denna radie använd sedan för att genom ekv.(0.10) och (0.19) beräkna den nya maxströmmen som förs vidare och ersätter den gissade strömmen i nästa beräkningsomgång. Dessa beräkningar gjorts ett antal gånger blev resultatet för varje motor: _ min 10.4 /axel rad sω ≈ , 134ytterr mm≈ , max 1.87M Nm≈ , max 4.25I A≈ och
min 2.50V V≈ . Man kan m.h.a dessa värden använda ekv. (0.9) och (0.8) för att beräkna vilken innerradie bandrullarna får och vilken axlarnas maximala vinkelhastighet blir: 128innerr mm≈ och _ max 54.7 /axel rad sω ≈ . Man får nu ett nytt diagram för varje motor som ser ut enl. Fig. 40
sid. 39
Fig. 40, driftsförhållande för två motorer
Då man har två motorer till varje linrulle finns även möjligheten att begränsa strömmen och spänningen som matas till DC-DC omvandlaren och laddar kondensatorn genom att man elektriskt kopplar motorerna olika beroende på driftsförhållande. Som angivet ovan kan motorerna vara seriekopplade enl. Fig. 41 vid låga hastigheter för att höja utspänningen men sedan kopplas parallellt enl. Fig. 42 för att vid hög hastighet sänka utspänningen och utnyttja den ena motorn för att till viss del bromsa bandet samtidigt som den andra leder den energi som krävs för att ladda kondensatorn.
Fig. 41, seriekoppling vid lågt varvtal
Fig. 42, parallellkoppling vid högt varvtal
16.2 DC-DC omvandlaren För att försöka minimera kretsens fysiska dimensioner har den konstruerats för switchfrekvensen 500kHz. Den relativt höga switchfrekvensen orsakar högre förluster i komponenterna och valet av dessa blev mer kritsikt. Som exempel kan tas de ursprungliga switchtransistorerna och likriktardioderna som fick bytas ut direkt. Även läckinduktanserna och kapacitanserna i switchtransformatorns lindningar får större betydelse men dessa kan å andra sidan hållas små tack vare de få lindningsvarv som behövs. Kretskortslayotens betydelse ökar däremot och större hänsyns måste tas till komponenternas placering för att minimera störningar samt kapacitanser och induktanser hos ledningsbanorna.

sid. 40
Här vinner man på att minska avståndet mellan komponenterna så detta syfte passar bra ihop med målet att minimera kretsens totala fysiska dimensioner.
DC-DC omvandlarens verkningsgrad bestämmer förmågan att kunna ladda kondensatorn vid låg belastning och följaktligen den undre gräns på lin-belastning som kommer kunna användas för att ej riskera att tömma kondensatorn. De mätningar som gjort har visat att kretsen lite beroende på snubber-konfiguration drar en hel del ström även då den ej levererar någon utström och sannolikt kommer det behövas ett tillskott från en extern strömkälla för att klara de lägsta belastningsförhållandena.
Då en hel del energi förloras i snubbermotstånden kanske en bättre lösning är att byta ut RC-snubbrarna mot den LCD-snubber som beskrivs i sekt. 3.3.4 och hoppas på att det ökar kretsens verkningsgrad tillräckligt. En annan lösning som till viss del kräver omkonstruktion är att sänka switchfrekvensen och acceptera ett större utrymmesbehov i utbyte mot högre verkningsgrad.
Vill man behålla en hög switchfrekvens kanske man bör fundera över olika lösningar med en resonant omvandlare där switchningarna sker då spänningen över samt strömmen genom switchtransistorerna är minimal. Dessa konstruktioner ökar dock kretsens komplexitet.
16.3 Simulering Den totala simuleringsmodellen med transformatorernas olinjära kärnor, switchtransistorerna, ledningsinduktanser och kapacitanser m.m. har visat sig svår att simulera och resultaten har ofta blivit att spänningar och strömma ej konvergerar eller att tidsstegen blir för små. Dessa problem har försökts lösas genom adderande av små motstånd samt kondensatorer för att om möjligt mjuka upp de spikar som uppstår en aning. Detta har fungerat till en viss del men det är kanske en bättre ide att försöka dela upp kretsen och simulera delarna var för sig och sedan koppla ihop dem i förenklade versioner och acceptera olikheten med verkligheten då hela kretsen simuleras.
De simuleringsresultat som redovisats stämmer till en del men vissa kurvor skiljer sig en del från mätningarna. Främst skiljer sig de simuleringar som gjorts då sekundärlindningarna varit hårt belastade och spänningarna över switchtransistorerna samt sekundärspänningarna får höga spänningsspikar samt deformerade pulsformer. Vid motsvarande mätningar har dessa fenomen ej kunnat ses i samma utsträckning.
sid. 41
17 Källförteckning [1] N. Mohan, T.M. Undeland, W.P. Robbins, ”Power Electronics”, John Wiley &
Sons inc, 2003.
[2] “Permanent Magnet DC-Motors”, http://www.dunkermotoren.com/data/downloads/catalogs/en/0611%20Katalog%20GR_G.pdf (2007-09-20), Alcatel SEL AG, Components Division, Dunkermotoren, 11/2006.
[3] G.A. Smith, “Biomechanics of Cross Country Skiing”, http://biomekanikk.nih.no/xchandbook/index.html(2007-09-20), Norwegian University for Sport and Physical Education.
[4] “Skid VM 2007 - Radiosporten”, http://www.sr.se/cgi-bin/Radiosporten/nyhetssidor/artikel.asp?nyheter=1&programid=2809&Artikel=1227797(2007-09-20), Radiosporten
[5] Wm. T. McLyman, “Transformer and inductor design handbook”, Marcel Dekker inc, 2004.
[6] “IRL2910”, http://www.elfa.se(2007-10-05), International Rectifier, 5/13/98.
[7] “31DQ05”, http://www.elfa.se(2007-10-05), International Rectifier.
[8] “LM5030 100V Push-Pull Current Mode PWM Controller”, http://www.elfa.se/ (2007-10-05), National Semiconductor, Mars 2005.
[9] “TN10/6/4 Ferrite toroids”, http://www.elfa.se/pdf/58/05876073.pdf(2007-11-05),
[10] “CCFL Push-Pull Snubber”, http://pdfserv.maxim-ic.com/en/an/AN3835.pdf(2007-10-29), Maxim, May 23 2006
[11] B.A. Gusev, V.I. Meleshin, and D.A. Ovchinnikov “Transformer Core Unbalancing Issue in a Full-Bridge DC-DC Converter with Current Doubler Rectifier”, www, ieeexplore.ieee.org/iel5/4147829/4147830/04147904.pdf(2007-12-13).
[12] John Ardizzoni “A Practical Guide to High-Speed Printed-Circuit-Board Layout”, http://www.analog.com/library/analogdialogue/archives/39-09/layout.pdf(2007-12-26),






![Kuggremmar Katalog 2006 - TematicT10 Fi Mi [] [ ]N cm Varvtal n [min-1] Fi Mi Nm [] [ ] cm N cm Nm cm 5 T10 SECA](https://img.pdfslide.tips/doc/110x75/60dbc3e795ecd41a0210c9ef/kuggremmar-katalog-2006-tematic-t10-fi-mi-n-cm-varvtal-n-min-1-fi-mi-nm.jpg)