Embed Size (px)
Citation preview
35
FIRAT ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ BÖLÜMÜ EMÜ-419 OTOMATİK KONTROL LABORATUARI DENEY 7
DC MOTORUN TÜM DURUM GERİ BESLEMELİ POZİSYON KONTROLÜ VE
SİSTEM DEĞİŞKENLERİNİN PC ORTAMINDA GERÇEK ZAMANDA GÖZLENMESİ
1. Amaç: Modern kontrol tekniklerinden tüm durum geri beslemeli kontrol kullanarak bir DC motorun
pozisyon kontrolünü sürekli zamanda yapmak. Sistem ara değişkenlerinin değişimlerini CE120 Controller seti ile gerçek zamanda bilgisayarda gözlemlemek.
Deney iki aşamadan oluşur; a) DIGIAC 1750 seti kullanarak DC motorun pozisyon kontrolünü modern kontrol
tekniklerinden tüm durum geri beslemeli kontrol tasarlayarak yapmak.
b) DIGIAC 1750 ve Analog CE120 Controller setlerini kullanarak DC motorun pozisyon kontrolü için (a) şıkkında tasarlanan tüm durum geri beslemeli kontrol sisteminin değişkenlerinin PC ortamında gerçek zamanda gözlenmesidir.
2. Doğrusal zamanla değişmeyen sistemlerin durum geri beslemeli kontrolü
Durum değişkeni nRx , sistem matrisi nnRA , giriş rRu , giriş matrisi rnRB , çıkış mRy , çıkış matrisi nmRC ve giriş-çıkış geçiş matrisi rmRD olmak üzere doğrusal bir
sistemin dinamik denklemi durum denklem formunda BuAxx (7.1) DuCxy (7.2)
ile tanımlanır. Bir sistemde nxrRK geri besleme kazancı olmak üzere tüm durum geri beslemeli kontrol,
Kxu (7.3) dizayn edile bilmesi için;
a) Sistemin tüm durum değişkenlerinin ölçülmesi, b) Sistemin n tüm durum kontrol edilebilirlik (controllability) özelliğine sahip olması
BAABBM 1n (7.4)
kontrol edilebilirlik matrisi M’in rankının n olmasını gerektirir. Böylece eşitlik (7.1) sisteminin tüm
)t(x durumları sınırsız bir kontrol işareti u ile, sınırlı bir 10 ttt zaman aralığında )t(x 0 başlangıç
durumundan )t(x 1 hedeflene durumuna götürülebilir.
2.1. Kutup yerleştirme ile durum geri beslemeli kontrolör kazançlarının tasarlanması Eşitlik (7.1) ile tanımlanan sistem tüm durum kontrol edilebilir olduğu ve bütün durum
değişkenlerinin ölçülebildiği kabul edilirse, eşitlik (7.3)’deki kontrolör denklem (7.1)’de yerine yazılırsa kapalı çevrim sistem dinamiği;
xBKAx )( (7.5)
olur. K matrisi hedeflenen kapalı çevirim performansını sağlayacak şekilde seçilir. Referans girişi yr sıfır olan regülatör sistem için hedeflenen kapalı çevirim performansını
sağlayacak şekilde gerekli K değerleri seçilirse kapalı çevirimli sistem sıfırdan farklı sabit diğer girişler için de aynı performansı sağlar. Kontrol kazançları K’nın dizaynı için birçok metot geliştirilmiştir. Burada kutup atama olarak adlandırdığımız ve lineer cebirdeki matrissel işlemlere dayanan kutup atama metodu verilecektir.

36
2.2. Kutup atama ile kontrol kazancı K hesaplanması;
Eşitlik (7.1) ve (7.2) tanımlanan sistem z durum değişkenine 01 T olmak üzere bir doğrusal durum transformasyon;
zTx (7.6)
kullanarak sistemi, kontrol edilebilir kanonik forma;
BuTzATTz 1-1 (7.7)
DuCTzy (7.8)
getirilerek tüm durum geri beslemeli kazanç K ’nın hesaplanması matrissel işlemlerle bilgisayarda kolaylık sağladığından oldukça kullanışlıdır. Eşitlik (7.6)’da verilen T transformasyon matrisi,
MWT (7.9)
olarak tanımlansın. Burada M kontrol edilebilirlik matrisi ve ia ’ler eşitlik (7.1) de verilen sistem
karakteristik matrisi n1n1n
1n asa...sasAsI
’nın karakteristik polinomal denklemin
katsayıları olmak üzere W matrisi;
0001
001a
01aa
1aaa
W
1
1n2n
12n1n
(7.10)
dir. Burumda eşitlik (7.7)’de verilen sistem ve giriş matrisleri sırası ile;
12n1nn
1
aaaa
1000
0100
0010
ATT
(7.11)
TBT 10...01 (7.12)
formundadır. Eşitlik (7.3)’te verilen kontrolör; zTKu (7.13)
olur ve eşitlik (7.7) yerine yazılırsa kapalı çevrimli sistem
zBKTTzATTz 11 (7.14)
olur. Hedeflenen kapalı çevrim öz değerler n21 ,...,, olarak seçilirse, eşitlik (7.14) hedeflenen
kapalı çevrim karakteristik denklem
0...
))....()((
11
1
2111
nnnn
n
sss
sssBKTTATTsI
(7.15)
olur. Daha sonra belirlenmek üzere skalar i değerler için
),...,3,2,1(, niKT i (7.16)
kapalı çevirim karakteristik matrisinde eşitlik (7.11) ve (7.12) yerlerine yazılırsa;
37
0)()()(
00
01
1
0
0
100
010
111
1
1111
11
11
11
nnnnn
nn
nnnn
nn
nn
asasas
asaa
s
s
aaa
sIBKTTATTsI
(7.17)
elde edilir. Eşitlik (7.15) ile eşitlik (7.17) eşitliğinden, s ’in kuvvetlerinin katsayıları eşitlenirse;
nnn
222
111
a
a
a
yada
nnn a
a
a
222
111
olur ve Eşitlik (7.16)’de K yalnız bırakılırsa; 111nn TK
yada
1111n1nnn TaaaK
(7.18)
olarak hedeflenen kontrol kazançları elde edilir. 2.3. Kutup atama tasarım adımları Adım 1: Sistemin tüm durum kontrol edilebilirlik şartı, n)M(rank , ise kontrol edilir ve 2.
adıma gidilir Aksi n)M(rank ise sistem için tüm durum kontrol edilemez ve K’lar dizayn
edilemediğinden tasarım burada sonlanır. Adım 2: Eşitlik (7.1)’deki sistem karakteristik matrisinden karakteristik polinomal
n1n1n
1n asa...sasAsI
katsayıları n21 a,,a,a bulunur.
Adım 3: Eşitlik (7.1)’deki sistem kontrol edilebilir kanonik formda değil ise eşitlik (7.9)’da verildiği gibi T transformasyon matrisi bulunur (Eğer sistem kontrol edilebilir kanonik formda ise
IT birim matrisi alınır.) T transformasyon matrisi MWT ’dır.
Adım 4: Hedeflenen kapalı çevrim öz değerler n21 ,...,, ’den hedeflenen kapalı çevrim
karakteristik polinomal denklemin;
n1n1n
1n
n21 s...ss)s)....(s)(s(
den n21 ,,, katsayıları bulunur.
Adım 5: Hedeflenen kapalı çevrimli performansı sağlayacak kontrolör kazanç matrisi K , eşitlik (7.16)’da verildiği gibi yazılarak bulunur.
1111n1nnn TaaaK
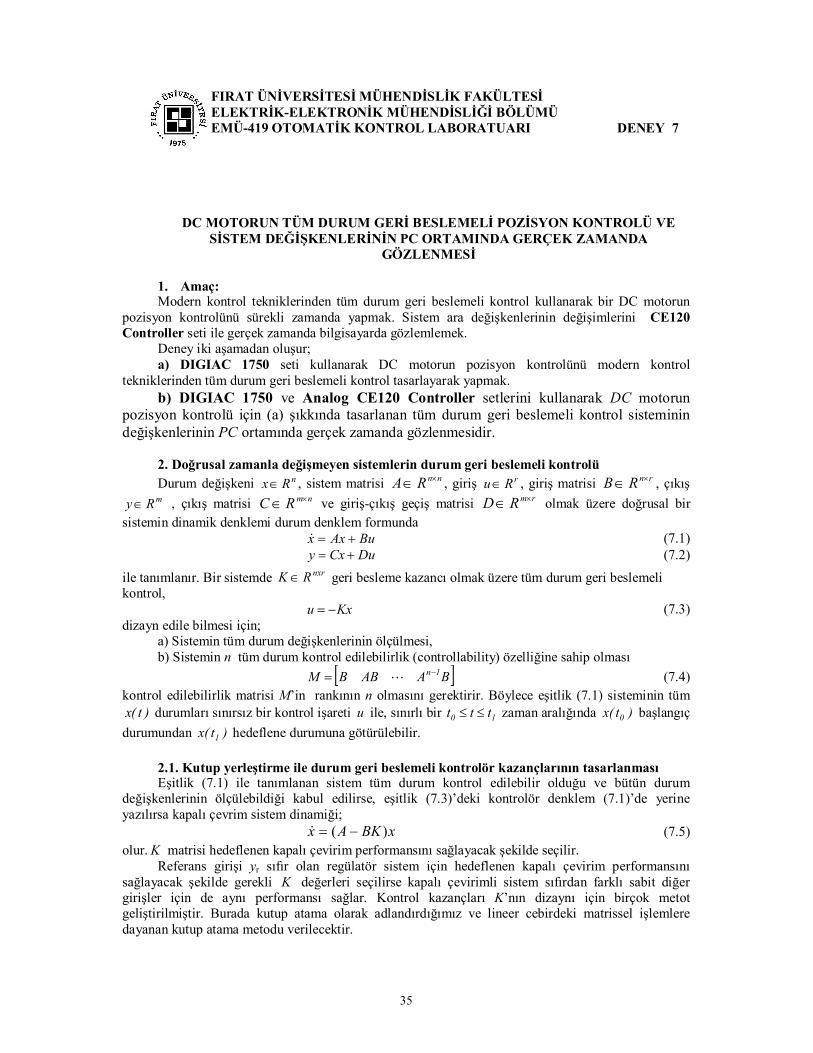
Şekil 7.1: Regülatör sistemi için tüm durum geri beslemeli kontrol.
B C
K A
x
D
y yr
u

38
Örnek 7.1: Şekil 7.1’de verilen regülatör, yr = 0 sistemi;
u
x
x
x
x
x
x
1
0
0
651
100
010
3
2
1
3
2
1
,
3
2
1
111
x
x
x
y (7.19)
için kapalı çevirim kutuplarını 4j2s , 4j2s ve 10s olarak şekilde gerekli olan
kontrolör kazançları K ‘yı tasarlayalım.
Adım 1:
3161
610
100
BAABBM 2 , 3)M(rank olduğundan sistem tüm durum
kontrol edilebilirdir. Adım 2: u = 0 için sistemin karakteristik matrisi ve karakteristik polinomal katsayıları
0156
651
10
01
322
1323
asasassss
s
s
s
AsI (7.20)
1a,5a,6a 321 bulunur.
Adım 3: Verilen sistem kontrol edilebilir kanonik formda olduğundan T transformasyon matrisi; bulunur.
100
010
001
001
016
165
3161
610
100
MWT (7.21)
birim matris formdadır ve 01 TT ’dir. Adım 4: Hedeflenen kapalı çevrim öz değerler kullanılarak hedeflenen kapalı çevrim matrisi ve
karakteristik polinomal denklem;
02006014)10)(42)(42( 322
1323 sssssssjsjs (7.22)
Buradan 200,60,14 321 olarak bulunur.
Adım 5: Kontrol kazanç matrisi K
85519961456012001112233 TaaaK (7.23)
olarak bulunur. Kontrolü
321
3
2
1
855199855199 xxx
x
x
x
Kxu
(7.24)
olarak bulunur. Bulunan değerler şekil 7.1’de yerine yazılarak Matlab/SIMULINK’te
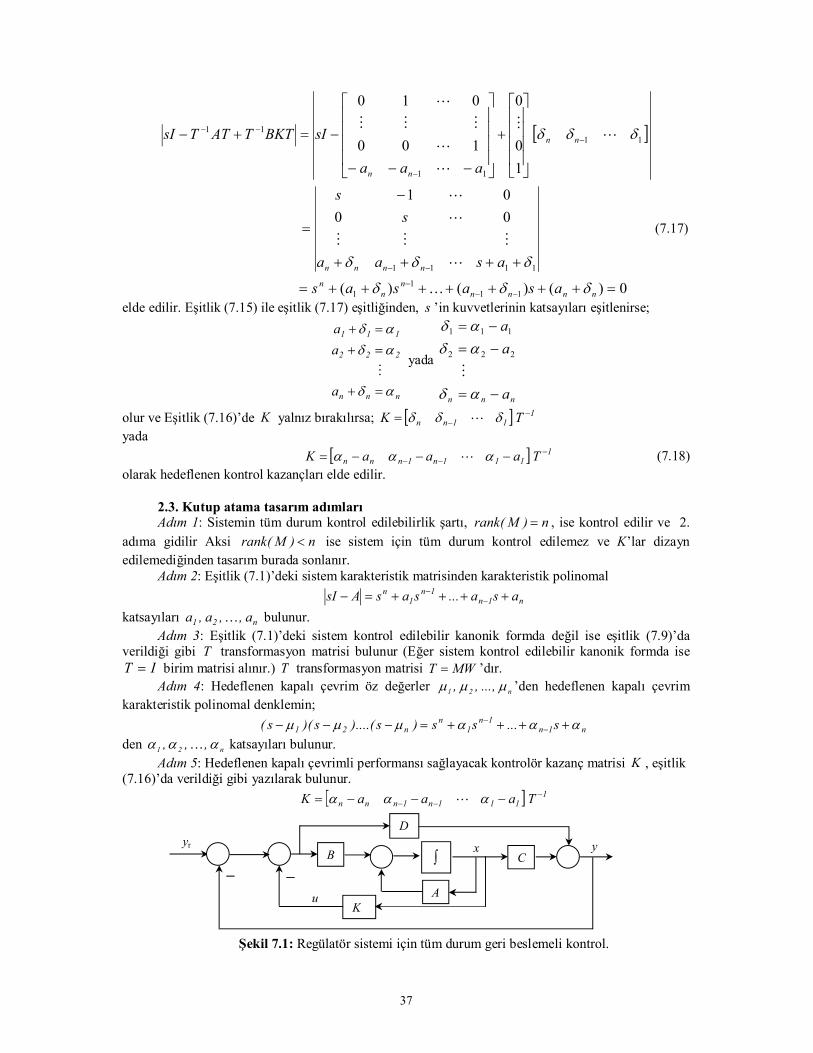
)0,0,1())(),(),(( 020201 txtxtx başlangıç şartları için simülasyonu yapılırsa x1 durum değişkeninin
değişimi Şekil 7.2’de olduğu gibi hedeflenen geçici rejim süresinde sürekli durum yr =0 ulaşır.
Sitemin referans girişi ry birim basamak fonksiyonu ise 0t için durum geri beslemeli kontrol
rkKx
xrk
x
x
x
kk0u
1
11
3
2
1
32
(7.25)
olur ve 0t için kapalı çevrimli sistem dinamiği
rBkxBKABuAxx 1 (7.26)
olur. Yukarıdaki kapalı çevrim performansı için durum geri beslemeli kontrol
rxxxrkKxu 199)855199( 3211 (7.27)
olur.
39
Şekil 7.2:
1x durum değişkenin başlangıç şartı tepkisi
Böylece kapalı çevirimli sistem dinamiği rBkxBKAx 1 ve açık formda;
r
x
x
x
x
x
x
r
x
x
x
x
x
x
199
0
0
1460200
100
010
199
1
0
0
855199
1
0
0
651
100
010
3
2
1
3
2
1
3
2
1
3
2
1
(7.28)
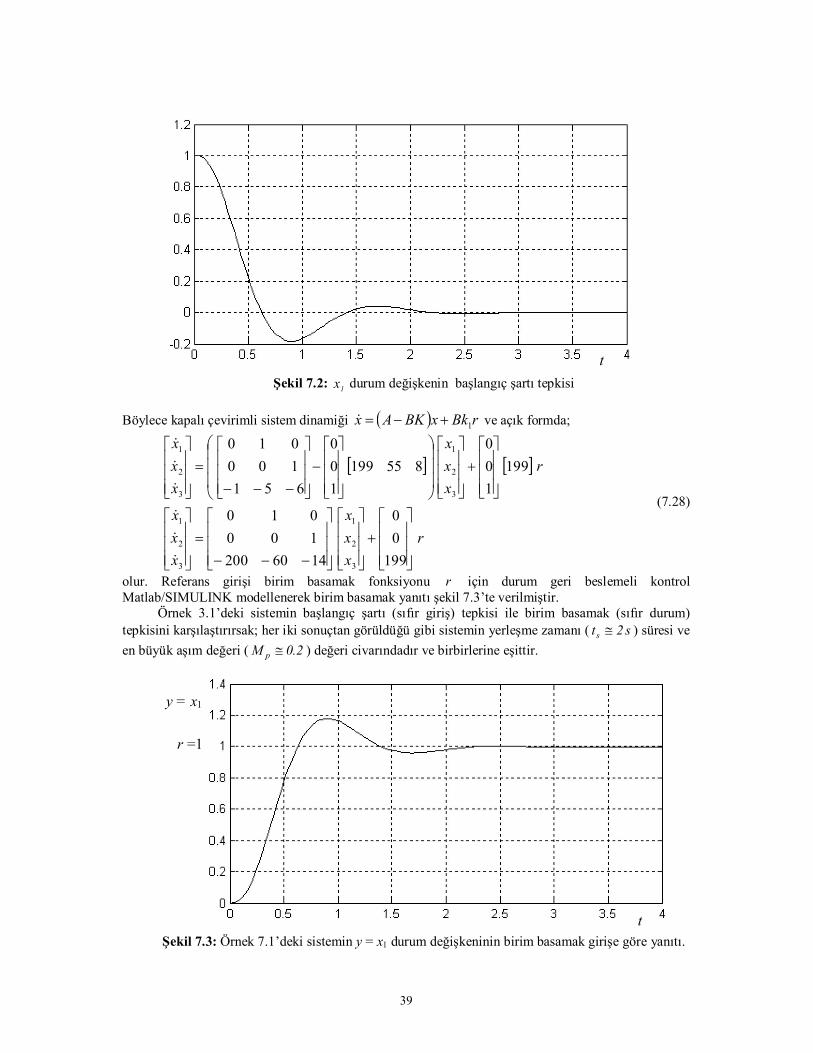
olur. Referans girişi birim basamak fonksiyonu r için durum geri beslemeli kontrol Matlab/SIMULINK modellenerek birim basamak yanıtı şekil 7.3’te verilmiştir.
Örnek 3.1’deki sistemin başlangıç şartı (sıfır giriş) tepkisi ile birim basamak (sıfır durum) tepkisini karşılaştırırsak; her iki sonuçtan görüldüğü gibi sistemin yerleşme zamanı ( s2ts ) süresi ve
en büyük aşım değeri ( 2.0M p ) değeri civarındadır ve birbirlerine eşittir.
Şekil 7.3: Örnek 7.1’deki sistemin y = x1 durum değişkeninin birim basamak girişe göre yanıtı.
t
r =1
y = x1
t
40
3. Deneyde kullanılan DC motorun durum denklem modeli: Motor kazanç sabitesi Km=3.5 Ncm/A ve motor zaman sabitesi Tm=19.6 ms olmak üzere
DIGIAC 1750 setinde bulunan DC motorun pozisyon ve hızı armatör gerilimi değiştirilerek yapılmaktadır. Armatör kontrolü DC motorun durum denklem modeli denklem (7.29)’daki gibidir.
ux
x
Tx
x
m
1
010
10
2
1
2
1
,
2
10x
x
T
Ky
m
m (7.29)
DIGIAC 1750 setinde pozisyonu ölçen potansiyometre kalibrasyonu ve hızı ölçen tako generatörün kalibrasyonu orta hız aralığında doğrusallaştırılmıştır ve DC motorun çıkışı,
2
111x
xy (7.30)
olacak şekilde düzenlenmiştir. Bu nedenle deneyde durum geri beslemeli kontrol için tüm durum değişkenleri çok iyi ölçüldüğü kabul edilerek ve denklem (7.30)’daki çıkış alınarak yapılacaktır.
3.1 Deneye gelmeden önce; a) Açık çevrim sistemin kararlılığını inceleyiniz? b) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.4 ve doğal frekans n=1 rad/s , c) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.5 ve doğal frekans n=2 rad/s , d) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.5 ve doğal frekans n=4 rad/s ,
için gerekli kontrol kazançlarını hesaplayınız?
4. Deneyin yapılışı: Birinci kısma ilişkin deney DIGIAC 1750 seti kullanılarak yapılacaktır.
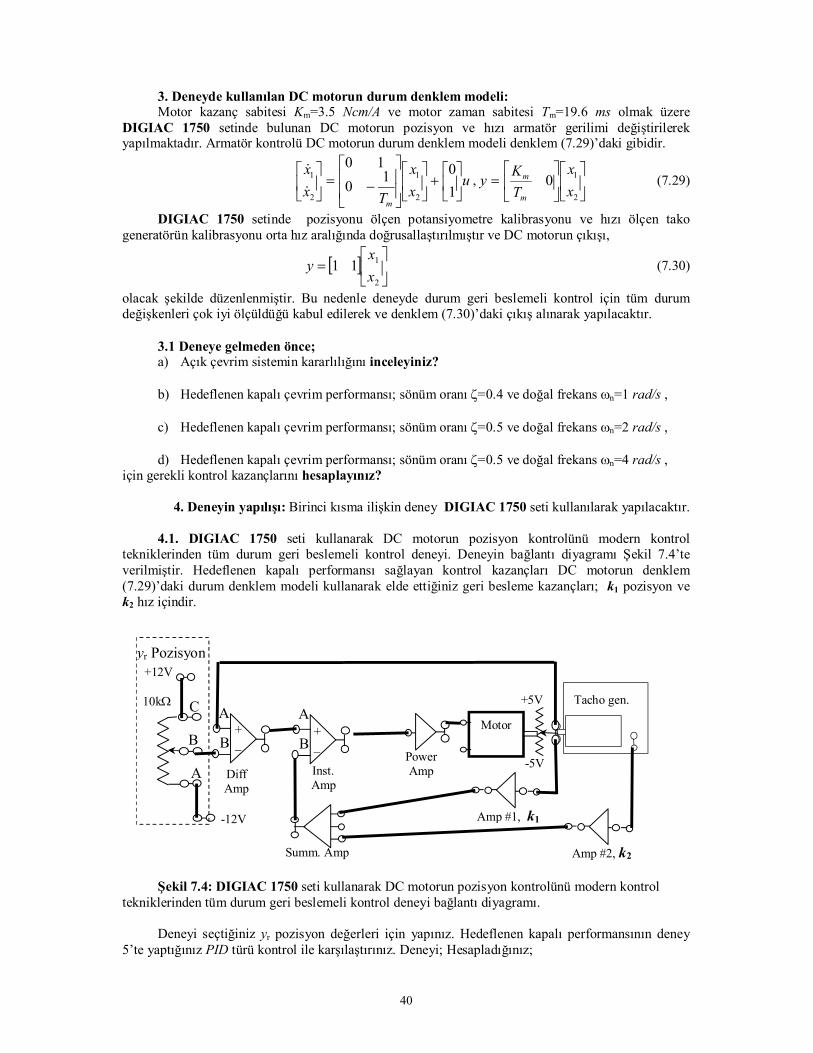
4.1. DIGIAC 1750 seti kullanarak DC motorun pozisyon kontrolünü modern kontrol tekniklerinden tüm durum geri beslemeli kontrol deneyi. Deneyin bağlantı diyagramı Şekil 7.4’te verilmiştir. Hedeflenen kapalı performansı sağlayan kontrol kazançları DC motorun denklem (7.29)’daki durum denklem modeli kullanarak elde ettiğiniz geri besleme kazançları; k1 pozisyon ve k2 hız içindir.
Şekil 7.4: DIGIAC 1750 seti kullanarak DC motorun pozisyon kontrolünü modern kontrol
tekniklerinden tüm durum geri beslemeli kontrol deneyi bağlantı diyagramı. Deneyi seçtiğiniz yr pozisyon değerleri için yapınız. Hedeflenen kapalı performansının deney
5’te yaptığınız PID türü kontrol ile karşılaştırınız. Deneyi; Hesapladığınız;
A
B
Tacho gen. C
B
A
10k
-12V
+12V
A
B
-5V
+5V
Motor
Amp #1, k1
Diff Amp
yr Pozisyon
Amp #2, k2 Summ. Amp
+ _
+ _
Inst. Amp
Power Amp
41
a) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.4 ve doğal frekans n=1 rad/s, b) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.5 ve doğal frekans n=2 rad/s, c) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.5 ve doğal frekans n=4 rad/s, için
yapınız.
d) Kaplı çevrimli sistemin sönümsüz osilasyon göstermesi için gerekli geri besleme kazançlarını hesaplayınız ve deneyini yapınız.
e) Kaplı çevrimli sistemin kararsız olması için gerekli geri besleme kazançlarını hesaplayınız
ve denyini yapınız.
4.2. DIGIAC 1750 ve Analog CE120 Controller setlerini kullanarak DC motorun pozisyon kontrolü için (a) şıkkında tasarlanan tüm durum geri beslemeli kontrol sisteminin değişkenlerinin PC ortamında gerçek zamanda gözlenmesidir.
4.2.1. CE120 Controller: CE120 Controller pratik olarak analog ve sayısal ortamdaki bir çok kontrol tekniğinin
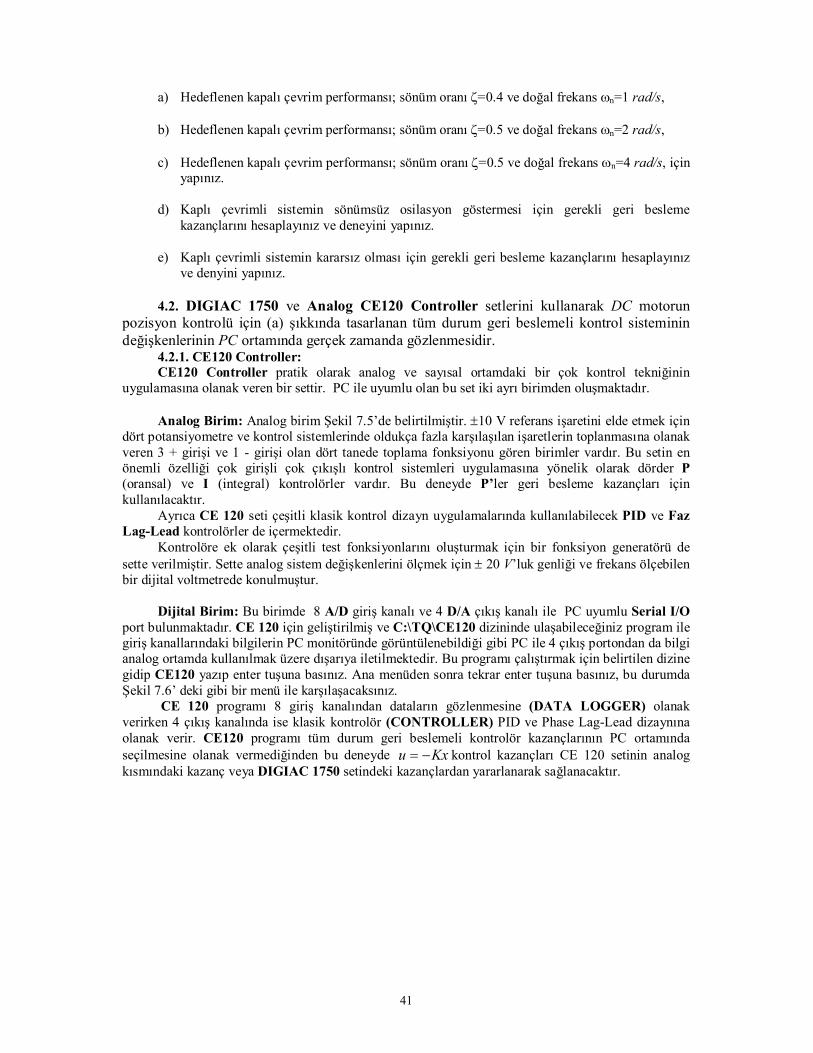
uygulamasına olanak veren bir settir. PC ile uyumlu olan bu set iki ayrı birimden oluşmaktadır. Analog Birim: Analog birim Şekil 7.5’de belirtilmiştir. 10 V referans işaretini elde etmek için
dört potansiyometre ve kontrol sistemlerinde oldukça fazla karşılaşılan işaretlerin toplanmasına olanak veren 3 + girişi ve 1 - girişi olan dört tanede toplama fonksiyonu gören birimler vardır. Bu setin en önemli özelliği çok girişli çok çıkışlı kontrol sistemleri uygulamasına yönelik olarak dörder P (oransal) ve I (integral) kontrolörler vardır. Bu deneyde P’ler geri besleme kazançları için kullanılacaktır.
Ayrıca CE 120 seti çeşitli klasik kontrol dizayn uygulamalarında kullanılabilecek PID ve Faz Lag-Lead kontrolörler de içermektedir.
Kontrolöre ek olarak çeşitli test fonksiyonlarını oluşturmak için bir fonksiyon generatörü de sette verilmiştir. Sette analog sistem değişkenlerini ölçmek için 20 V’luk genliği ve frekans ölçebilen bir dijital voltmetrede konulmuştur.
Dijital Birim: Bu birimde 8 A/D giriş kanalı ve 4 D/A çıkış kanalı ile PC uyumlu Serial I/O
port bulunmaktadır. CE 120 için geliştirilmiş ve C:\TQ\CE120 dizininde ulaşabileceğiniz program ile giriş kanallarındaki bilgilerin PC monitöründe görüntülenebildiği gibi PC ile 4 çıkış portondan da bilgi analog ortamda kullanılmak üzere dışarıya iletilmektedir. Bu programı çalıştırmak için belirtilen dizine gidip CE120 yazıp enter tuşuna basınız. Ana menüden sonra tekrar enter tuşuna basınız, bu durumda Şekil 7.6’ deki gibi bir menü ile karşılaşacaksınız.
CE 120 programı 8 giriş kanalından dataların gözlenmesine (DATA LOGGER) olanak verirken 4 çıkış kanalında ise klasik kontrolör (CONTROLLER) PID ve Phase Lag-Lead dizaynına olanak verir. CE120 programı tüm durum geri beslemeli kontrolör kazançlarının PC ortamında seçilmesine olanak vermediğinden bu deneyde Kxu kontrol kazançları CE 120 setinin analog kısmındaki kazanç veya DIGIAC 1750 setindeki kazançlardan yararlanarak sağlanacaktır.
41
Analog Birim PC ile Uyumlu Dijital Birim Şekil 7.5 CE 120 controller seti
Dijital Voltmetre
Sinyal Generatörü
10 Volt Verebilen Potansiyometre
I- Kontrolörler
P- Kontrolörler
Toplama Devreleri
PID- Kontrolör
Phase Lag-Lead Kontrolör
A/D
1 2
3 4
5 6
7 8
Toprak
D/A
1 2
3 4
Serial I/O
Çıkış
Girişler

43
Şekil 7.6 CE120 Program menüsü
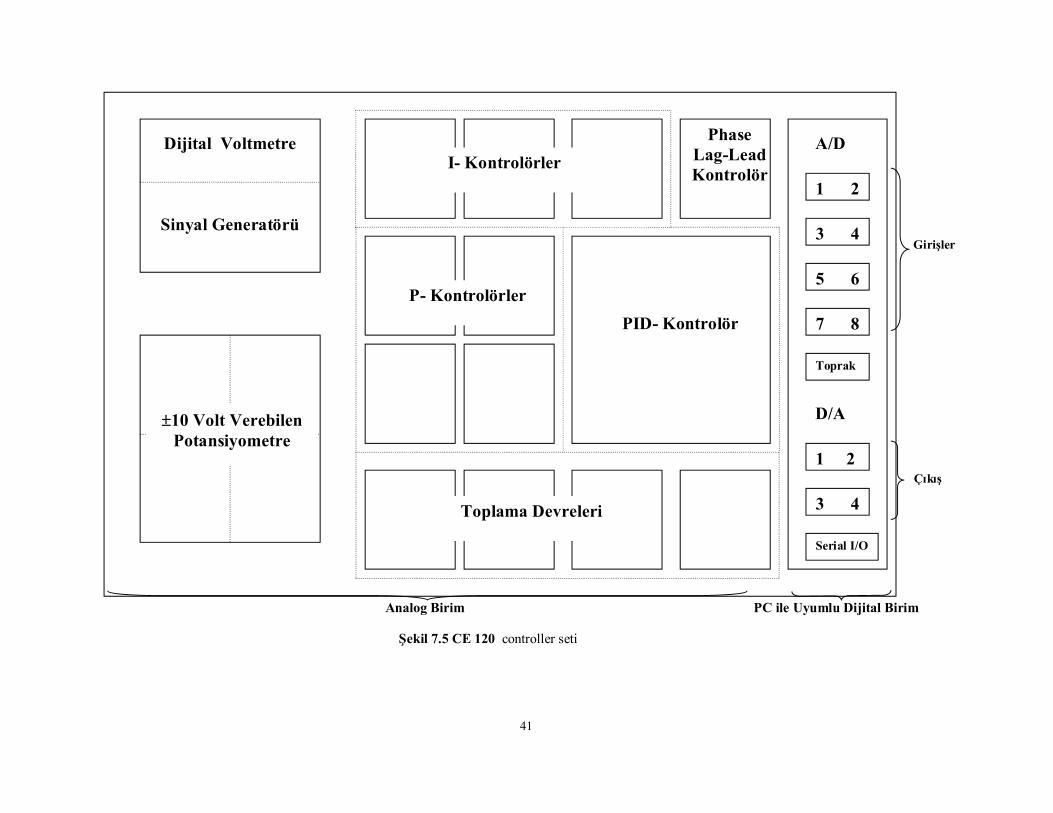
4.2.2. Deneyde kullanılan setler ve bağlantı diyagramı: Bu deneyde CE 120 ile DIGIAC 1750 (Transducer and Instrumentation Tramer) ve PC şekil
7.7’de gösterildiği gibi birlikte kullanılacaktır. Bundan dolayı her iki setin ortak sıfır şartını sağladığına dikkat ediniz.
Deneyde DIGIAC 1750 setinden kullanılacak birimler; DC motor, motoru sürmek için +12V’luk giriş ve 9 W’lık güç amplify (Power Operational Amplifier) ve ölçme devreleri (pozisyon; 5V’luk Servo-Potansiyometrede ve hız; tako generatör) dir.
CE 120 Controller setinde kullanılacak birimler; yr referans, geri besleme kazançları, toplama ve fark alma işlemleri ve sistem ara değişkenleri PC ortamında gözlemlemek için 8 giriş A/D portodur.
Deney de kullanılan CE 120 ile DIGIAC 1750 setlerinde kullanılan birimlerin blok diyagramı şekil 7.8 ‘de verilmiştir. Deneyde kullanılan CE 120 ile DIGIAC 1750 setlerin birimleri ve deneyin bağlantı blok diyagramı detaylı olarak şekil 7.8’de verilmiştir.
Şekil 7.7 Deneyin Bağlantı Diyagramı
Şekil 7.8 Deney 3.1’ in blok diyagramı
4.2.3 CE 120 Controller seti ile sistem ara değişkenlerinin PC ortamında izlenmesi: Bölüm 4’te belirtildiği gibi Şekil 7.6’yi elde ediniz Input kısmına giderek Channels
opsiyonunda 8 yazarak tüm giriş kanalarını seçiniz. Graph kısmına geçiniz ve Select Channels to Draw seçeneğinden tüm giriş kanallarını aktif hale getiriniz.
File Controller Options Input Graph
PC
COM 1
CE 120 A/D
D/A DIGIAC 1750
(a) (b) (c)
Sıfırlarının birleştirilesine dikkat ediniz.
5 Volt
Seri Kontrolör
DC Motor
yr 12 Volt
K
x1
Konum bilgisi, Potansiyometre
CE 120 Controller DIGIAC 1750
Pow Amp
x
44
PC monitöründe kanalların çıkışları aşağıdaki renklerle verilmiştir. CH 1 Kırmızı CH 5 Yeşil CH 2 Turkuvaz CH 6 Açık Mavi CH 3 Sarı CH 7 Açık Gri CH 4 Beyaz CH 8 Koyu Pembe Option kısmında Operate As opsiyonunda Data Logger’ ı seciniz. Seçtiğiniz her opsiyondan sonra Esc tuşuna basarak bir önceki menüye geçe bilirsiniz. Controller kısmına gelinip Data Logger Run’ ı seçiniz ve enter tuşuna basınız. Bu durumda F1 fonksiyon tuşuna bastığınızda 8 giriş kanalına bağlantıları yapılacak sistem ara değişkenlerinin zamana göre değişimini gözlemleyebilirsiniz. Ayrıca F1 fonksiyon tuşuyla ekranı durdurup tekrar aktif hale getirebilirsiniz. Ekranın alt kısmında fonksiyon tuşları verilmiştir F2 fonksiyon tuşunun işlevini not ediniz. Grafikte x (süre) eksenini küçültmek için klavyede Page Down büyütmek için Page Up tuşlarına basınız. y (genlik) eksenini küçültmek ve büyütmek için Şekil 7.6’te verilen program menusunda Input/Input limit kısmına gidiniz. Gördüğünüz gibi default değeri 10000 dir. Bu değeri Max ve Min olarak istediğiniz değere getirebilirsiniz. Deneyde bazı işaretler büyük bazı işaretler de küçük olabilir. Küçük işaretleri gözlemlemek için örneğin servo potansiyometre ve yr referans işaretlerini gözlemlemek için 2000 limitleri uygundur.
4.2.4 Deneyin yapılışı: DIGIAC 1750 ve Analog CE120 Controller setlerini kullanarak DC
motorun pozisyon kontrolü için (a) şıkkında tasarlanan tüm durum geri beslemeli kontrol sisteminin değişkenlerinin PC ortamında gerçek zamanda gözlenmesi kontrol kazançları CE120 Controller setinin analog birimi kullanılarak yapıla bildiği gibi DIGIAC 1750 seti de kullanıulabilir. Burada CE120 Controller setinin analog birimi kullanılacaktır.
Burada yr=00 konumu için Servo-Potansiyometrenin her hangi bir başlangıç şartında kontrolör motorun pozisyonunu 00/ 3600 getirilmesi isteniyor. yr referans çıkışını CE 120’deki dijital voltmetreye bağlayarak 0 volta getiriniz. Sistem ara değişkenlerini PC’de gözlemlemek için ilk 5 giriş kanallarını aktif yaparak aşağıdaki bağlantıları yapınız; CH 1 Referans yr CH 3 Servo-Potansiyometre CH 4 Seri oransal kontrol çıkışı CH 5 Sürücü devresi Power Amp. Çıkışı
a) Geri besleme kontrolör kazançlarını sıfır, u=0 alınız ve seri kontrolöre bir oransal kontrolör bağlayınız. Oransal kontrolün genliğini x1 çarpan kademesinde iken, 1 konumuna getiriniz, DIGIAC 1750’deki potansiyometre diskinin bağlı bulunduğu kısmı hafif basarak devreye alınız. Potansiyometreyi 00/3600konumundan sağa ve sola 180 den küçük pozisyon değerlerinde sabit olacak şekilde motor milini döndürerek sağlayınız ve ekranın orta kısmına yakın süreye kadar sabit tutunuz. Elinizi milden aniden kaldırınız ve sonucu gözlemleyiniz. Potansiyometrenin referans (yr=0) konumuna gelmediğini gözleyiniz. Aynı işlemi oransal kontrolün genliğini x1 çarpan kademesinde iken, 5, 8 ve 10 konumları için tekrarlayınız. Oransal kontrolün bu değerleri için potansiyometrenin referans (yr=0) konumuna gelip gelmediğini ve kapalı çevrimli sistemin geçici durum yanıtında osilasyonların genliğini ve değişimini not ediniz. Sonuçları raporlarınızda sistemin Root Locus diyagramını çizerek yorumlayınız?.
b) Geri beleme kazançlarını deneyin 3.1 bölümünde verilen hedeflenen kapalı çevrim
performansı; sönüm oranı =0.4 ve doğal frakans n=1 rad/s olacak şekilde daha önce dizayn ettiğiniz K kazançlarının değerleri ayarlayınız ve şekil 7.8’de olduğu gibi kontrolör bloklarının bağlantısını gerçekleştiriniz. Durum geri beslemeli kontrolör kazanç çıkışlarını ve toplam kontrolör sinyalini PC’de gözlemlemek için son 3 giriş kanallarını aktif yaparak aşağıdaki bağlantıları yapınız;
CH 6 Pozisyon sinyali üzerindeki k1 çıkışı
45
CH 7 Hız sinyalı üzerindeki k2 çıkışı CH 8 Toplam kontrol sinyali u=-Kx çıkışı Seri oransal kontrolör kazancını 1 yaparak yukarıdaki (a) deneyinde yapılanları tekrarlayınız. Potansiyometrenin referans (yr=0) konumuna geldiğini gözlemlediniz mi? Neden? Açıklayınız?
c) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.5 ve doğal frekans n=2 rad/s olacak şekilde geri beslemeli kontrol kazançlarını ayarlayarak her bir durum için yukarıdaki durumu tekrarlayınız?
d) Hedeflenen kapalı çevrim performansı; sönüm oranı =0.5 ve doğal frekans n=4 rad/s olacak şekilde geri beslemeli kontrol kazançlarını ayarlayarak her bir durum için yukarıdaki durumu tekrarlayınız ve (b), (c) sonuçları ile karşılaştırarak yorumlayınız?
4.2.5 Geri belemeli Seri kontrolörde integratör etkisi: Şekil 7.8’de seri oransal kontrol yerine integratör bağlayarak yukarıdaki (b), (c) ve (d)
şıkkında seri integral kontrol etkisini inceleyiniz? ve sonuçlarını not ediniz? 5.4 Kapalı çevrimli sistemin basamak giriş yanıtı: Şekil 7.8’de referans giriş yerine frekansı oldukça düşük bir kare dalga CE 120 setinde
bulunan osilatörden seçiniz ve kare dalga referans işaretinin her bir konumdaki değişimi sisteme basamak fonksiyon giriş kabul ederek PC’de sistem ara değişkenlerinin değişimini deney 5.2 (b), (c) ve (d) şıkları içinde ve 5.3 bölümünde yapılanlardan en iyi performans gösteren değer için tekrarlayınız? Sonuçlarını karşılaştırınız? Yukarıdaki kapalı çevrimli performansın yukarıdaki sonuçlarla aynı olup olmadığını tartışınız?
6. Sonuç ve Tartışma: 1. Deney föyünün 2. kısmında verilenleri deneyden önce elde ediniz ve Matlab/SIMULINK
modelleyerek sonuçları elde ediniz? Sonuçlarını raporlarınızda yazınız? 2. Deney föyünün 3. kısmında verilen DC motorun durum denklem modelinin açık çevrim
performansını elde ediniz ve kapalı çevrim performansının nasıl olması gerektiği konusunu yorumlayınız ve raporlarınızda yazınız?
3. Deney föyünün 3. kısmında istenenleri deneyden önce elde ediniz ve elde ettiğiniz sonuçları deneye getiriniz.
4. Deneyin 5.2, 5.3 ve 5.4 kısımlarında istenenleri ve sonuçlarını raporlarınızda geniş olarak yazınız? Yaptığınız deneyleri Matlab/SIMULINK modelleyerek benzeşim ve deneysel sonuçları tartışınız?
5. Deneyde kullandığınız PC programına benzer bir program sizden isteniyor. Programı nasıl yapacağınızı ve PC’nin COM1 portu kullanılacak şekilde nasıl gerçekleştireceğinizi araştırarak yazınız?
6. PC’de seri port ile bilgi alışverişi nasıl yapılır araştırınız? Referans vererek raporlarınızda açıklayınız?
46
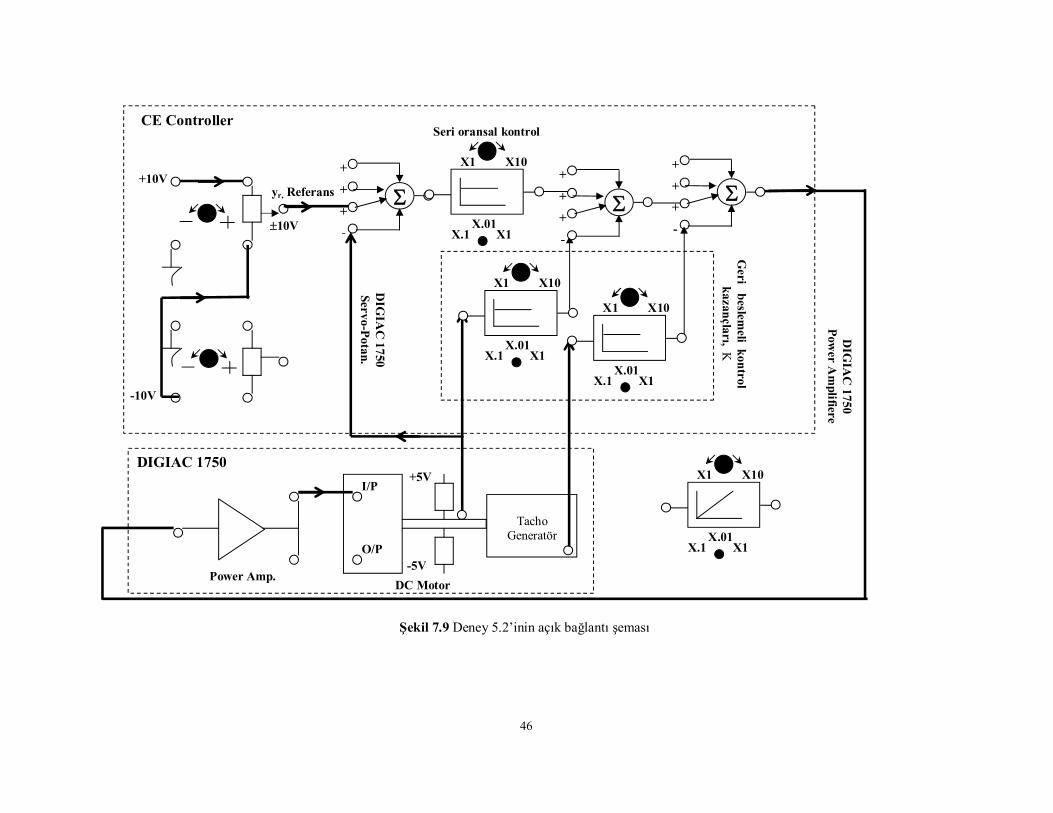
Şekil 7.9 Deney 5.2’inin açık bağlantı şeması
+10V
-10V
10V
yr, Referans
+
+
+
-
D
IGIA
C 1750
Pow
er Am
plifiere
DIG
IAC
1750
Servo-P
otan.
Power Amp.
I/P
O/P
DC Motor
+5V
-5V
DIGIAC 1750
CE Controller
Tacho
Generatör
+
+
+
-
X1 X10
X.1 X.01
X1
+
+
+
-
Geri b
eslemeli k
ontrol
kazan
çları, K
Seri oransal kontrol
X1 X10
X.1 X.01
X1
X1 X10
X.1 X.01
X1
X1 X10
X.1 X.01
X1







![5786 · r g bOMGL (vbbLOX. DC eqq DC b] SIG 0bGLSÇ!OU: brVLE brVIE IMbnr DC cngçur DC brVLE cr18BEHL DC eglD srVLE CC2. DVLV S T020 reoo -VIP eoo 82](https://img.pdfslide.tips/doc/110x75/5eadabdd762196423f2259b4/r-g-bomgl-vbblox-dc-eqq-dc-b-sig-0bglsou-brvle-brvie-imbnr-dc-cngur-dc.jpg)






![Referans De - Kontrol ve Otomasyon Teknolojisi Programı · PDF fileReferans De÷Lúkeni, Giri de R ] keni ile ayn f anlamda kullan f o fr. (Kontrol i areti veya Kontrol de R ] keni)](https://img.pdfslide.tips/doc/110x75/5a9935217f8b9a9c5b8d82e2/referans-de-kontrol-ve-otomasyon-teknolojisi-programi-delkeni-giri-de-r-keni.jpg)