Embed Size (px)
DESCRIPTION
MECM
Citation preview
DEFECTOS ROCOSOS
Isabel Reig RamosProfesor Titular - UPM
DEFECTOS ROCOSOS
Isabel Reig RamosProfesor Titular - UPM
2
ÍNDICEÍNDICE1. TIPOS DE DEFECTOS: singulares y estadísticos
2. TIPOS DE PARÁMETROS ESTADÍSTICOS PARA DESCRIBIR EL MEDIO
ROCOSO
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
4. ORIENTACIÓN: representación gráfica y vectorial de los defectos
3
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
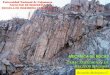
LA MAYORÍA DE LOS MACIZOS ROCOSOS SE COMPORTAN COMO UN MEDIO DISCONTINUO, ESPECIALMENTE CERCA DE LA SUPERFICIE.
LOS DEFECTOS, QUE HACEN AL MACIZO DISCONTINUO, DETERMINAN EN GRAN MANERA EL COMPORTAMIENTO MECÁNICO.
ES ESENCIAL LA DESCRIPCIÓN CUIDADOSA DE LA ESTRUCTURA DEL MACIZO ROCOSO, Y DE LA NATURALEZA Y MORFOLOGÍA DE SUS DEFECTOS O DISCONTINUIDADES.
4
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
SE PUEDEN DISTINGUIR DOS ESCALAS EN LOS TIPOS DE DEFECTOS O DISCONTINUIDADES DE LAS ROCAS:
Escala microscópica: afecta al comportamiento de la roca matriz(fisuras, huecos,…). Reduce la resistencia y deformabilidad.
Escala macroscópica: se habla de macrodefectos o discontinuidades. Cualquier plano de separación en el macizo rocoso.
• Condicionan y gobiernan el comportamiento del macizo rocosoen lo que se refiere a resistencia, deformación y permeabilidad (disminuye la resistencia al corte y la resistencia a tracción, y aumenta la deformabilidad y la permeabilidad).
5
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
Discontinuidad que afectan al macizo rocoso: pueden ser de origen sedimentario (superficies de estratificación o laminación), diagenético o tectónico (diaclasas, fallas, diques)
Sistemáticas (defectos estadísticos):
– Aparecen agrupadas en familias. Las discontinuidades de una misma familia son paralelas o subparalelas entre sí.
– Se caracterizan por sus valores medios de orientación y por sus caracterís-ticas físicas y resistentes.
Singulares (fallas, zonas de debilidad, …):
– Aparecen en pequeño número– Suelen ser más continuas y persistentes que las discontinuidades
sistemáticas.
6
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
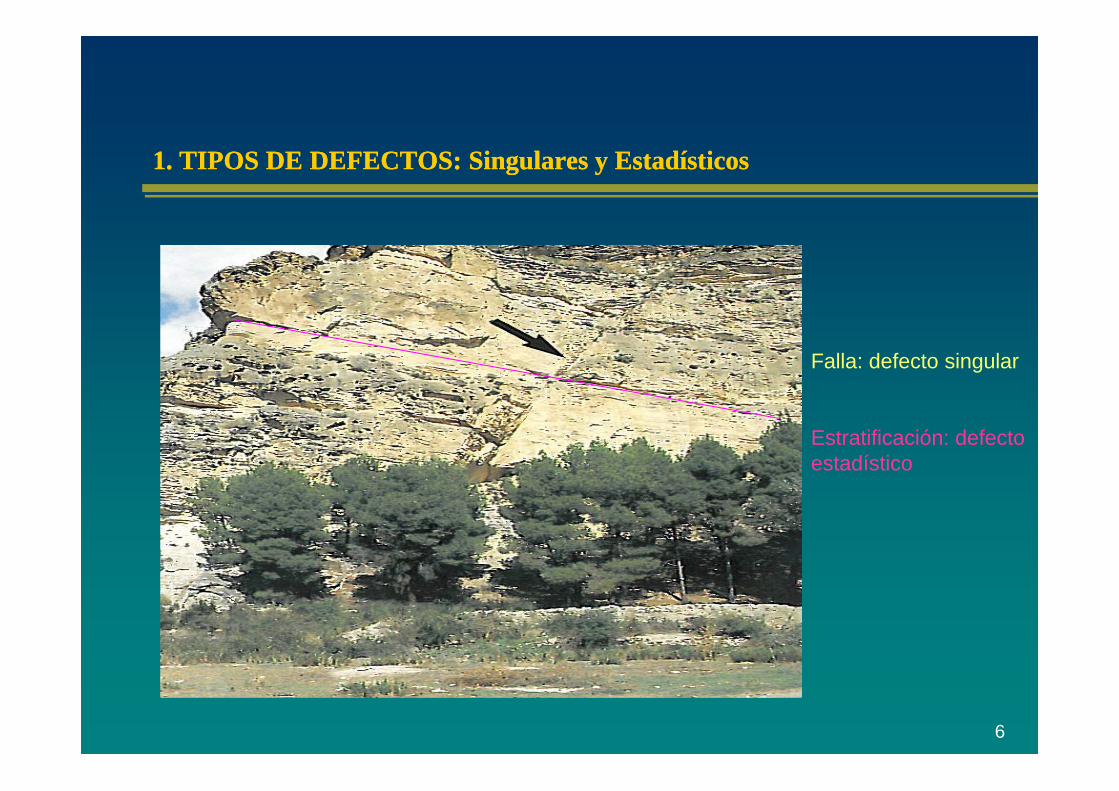
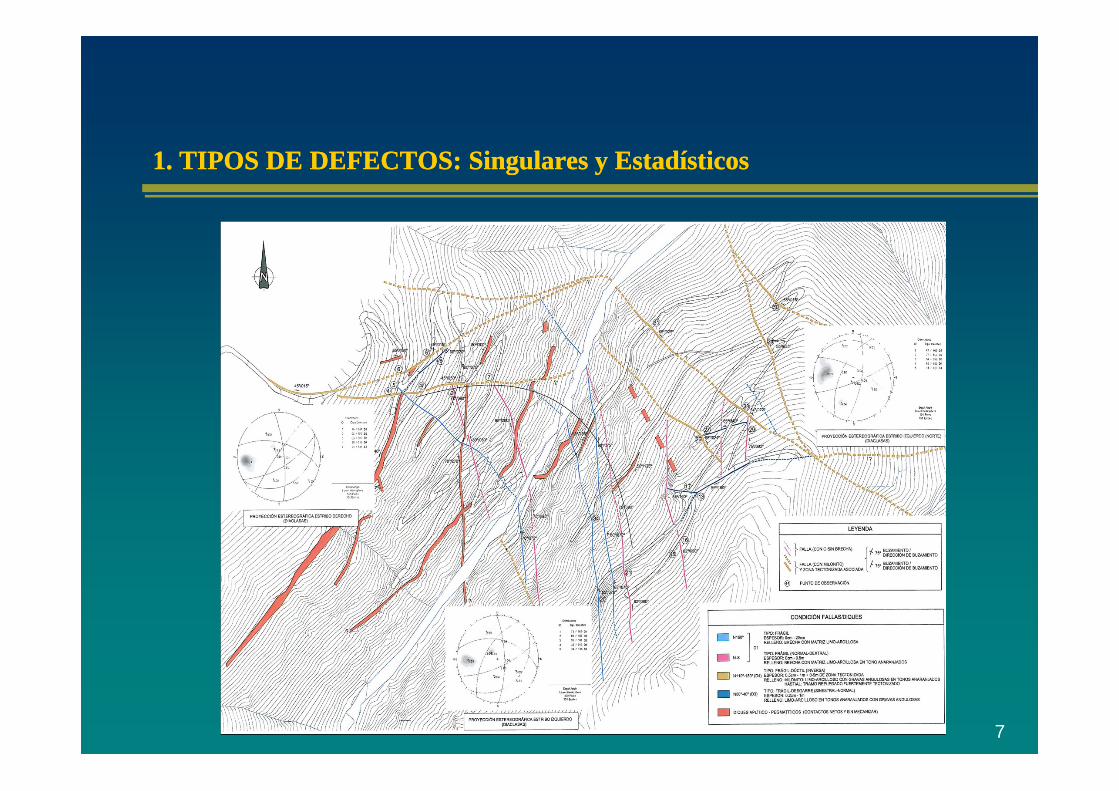
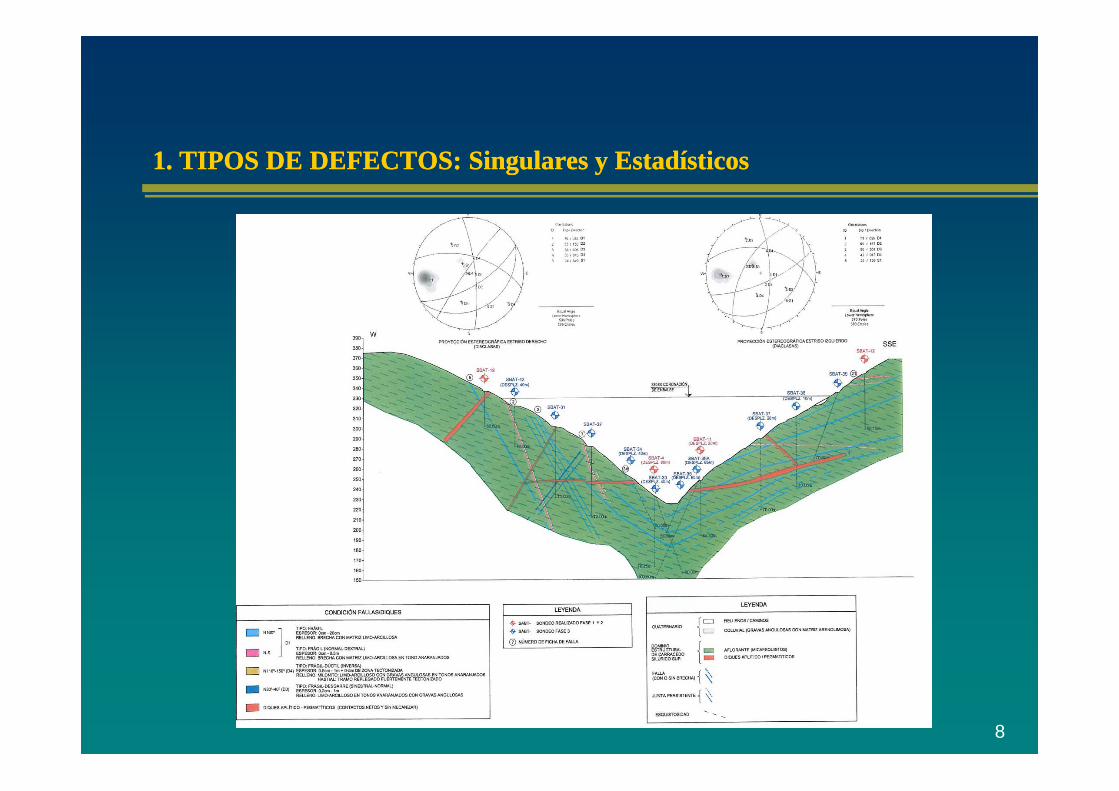
Falla: defecto singular
Estratificación: defecto estadístico
7
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
8
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
9
1. TIPOS DE DEFECTOS: Singulares y Estadísticos1. TIPOS DE DEFECTOS: Singulares y Estadísticos
Defectos Estadísticos o Sistemáticos:
No puede pretender dar un estudio detallado de cada uno de ellos por lo que es necesario hacer un análisis de tipo estadístico de su conjunto.
En las conclusiones debe tenerse en cuenta que los parámetros de descripción, en realidad, no son números sino parámetros de poblaciones estadísticas, con las implicaciones consecuentes en relación a la fiabilidad y los márgenes de seguridad.

10
2. TIPOS DE PARÁMETROS ESTADÍSTICOS2. TIPOS DE PARÁMETROS ESTADÍSTICOS
Se pueden dividir en dos grupos:
Parámetros relativos al sistema macizo-familias de defectos:– Número de familias de discontinuidades– Orientación– Espaciamiento– Tamaño y forma de los bloques– Persistencia
Parámetros relativos a las familias de defectos en sí:– Apertura– Rugosidad– Estado de las paredes de las juntas– Relleno de la discontinuidad– Condiciones hidráulicas
11
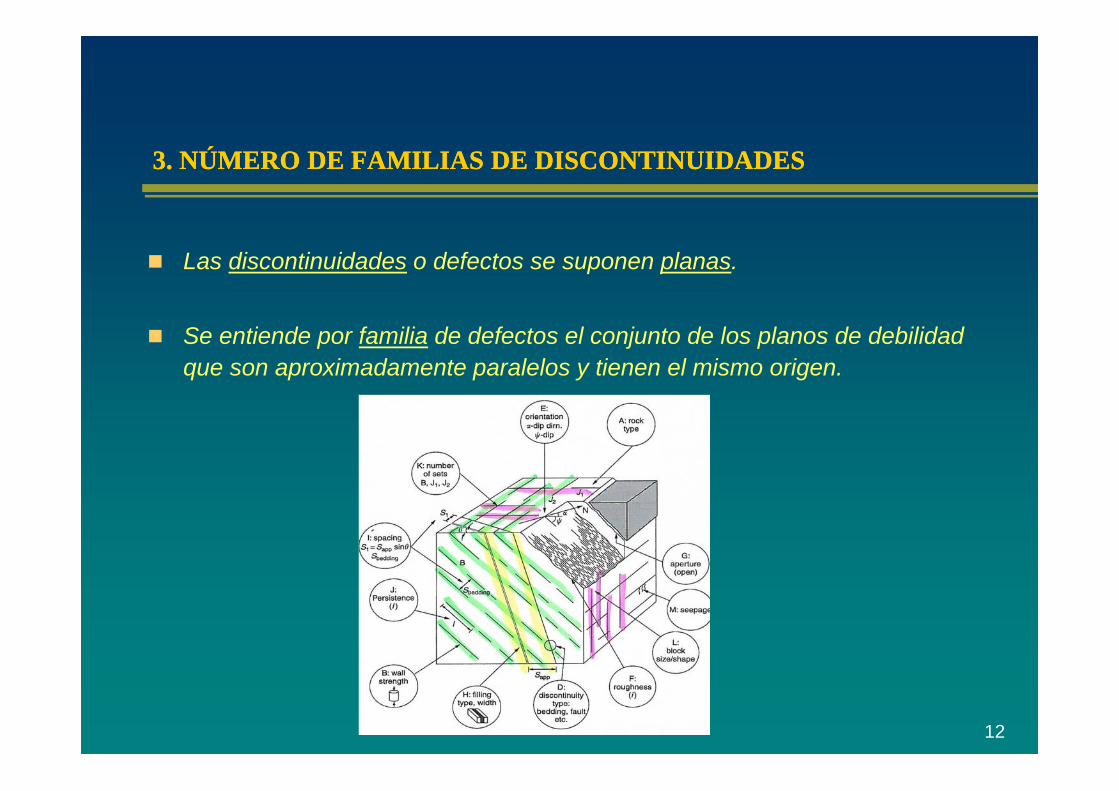
2. TIPOS DE PARÁMETROS ESTADÍSTICOS2. TIPOS DE PARÁMETROS ESTADÍSTICOS
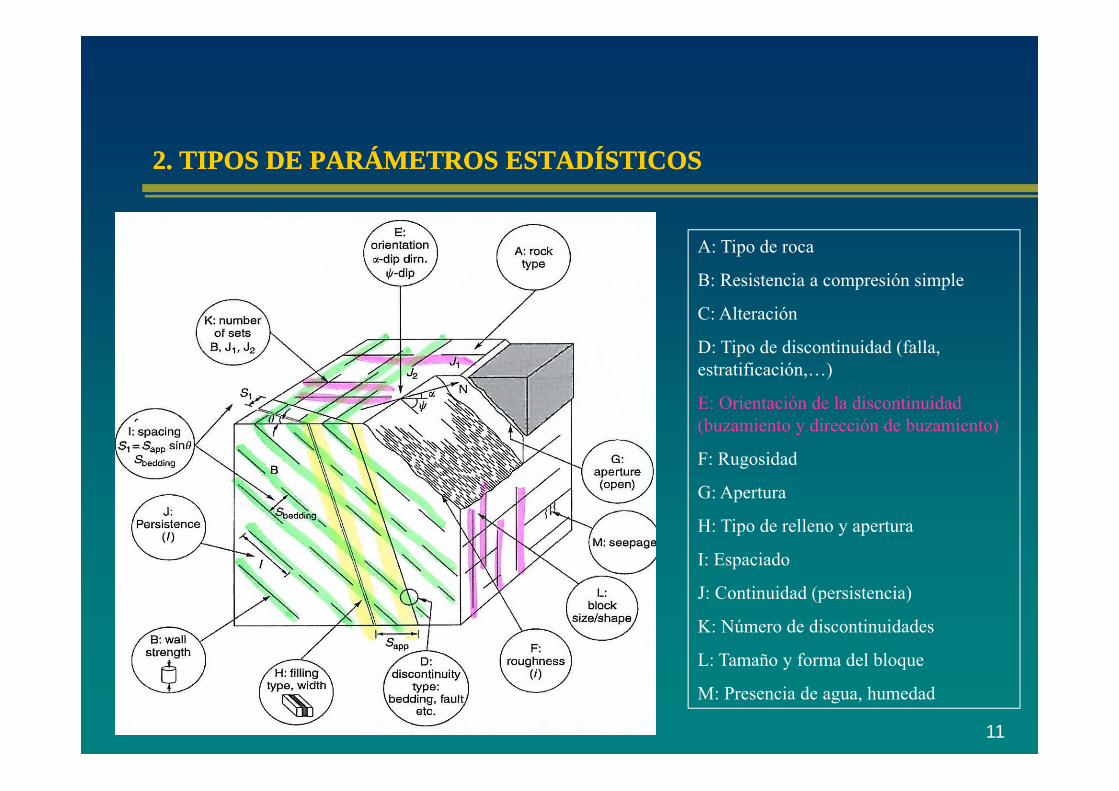
A: Tipo de roca
B: Resistencia a compresión simple
C: Alteración
D: Tipo de discontinuidad (falla, estratificación,…)
E: Orientación de la discontinuidad (buzamiento y dirección de buzamiento)
F: Rugosidad
G: Apertura
H: Tipo de relleno y apertura
I: Espaciado
J: Continuidad (persistencia)
K: Número de discontinuidades
L: Tamaño y forma del bloque
M: Presencia de agua, humedad
12
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
Las discontinuidades o defectos se suponen planas.
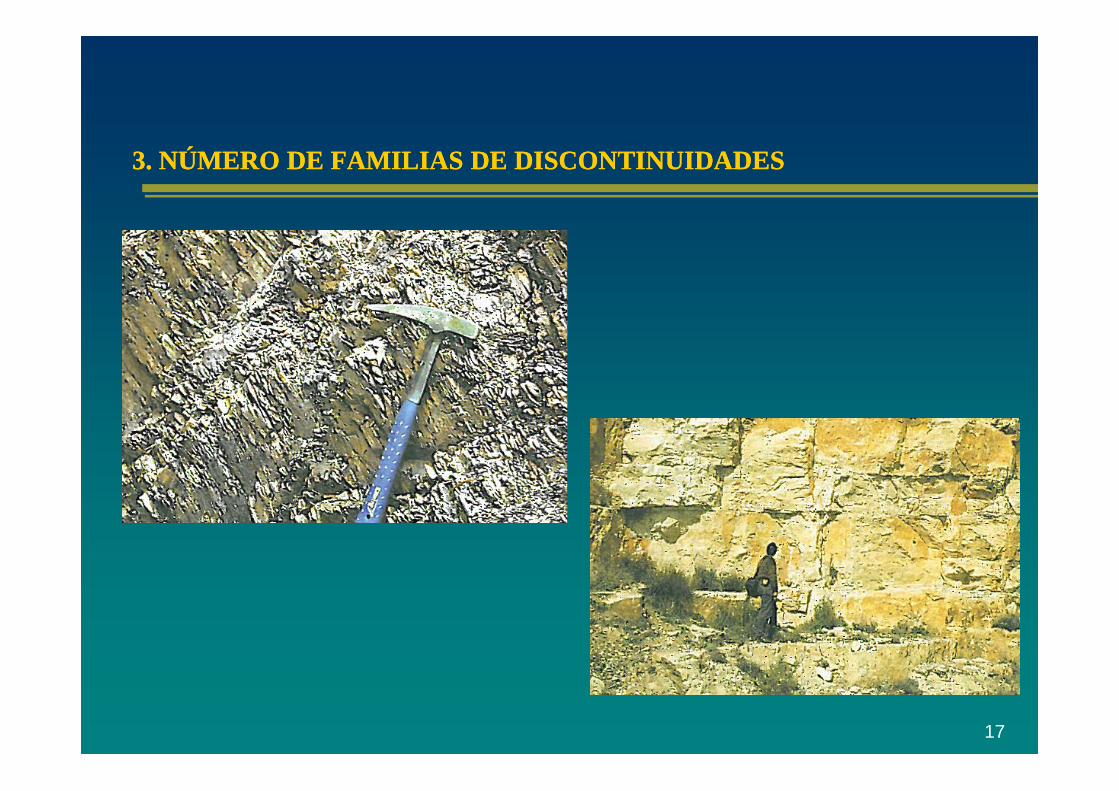
Se entiende por familia de defectos el conjunto de los planos de debilidad que son aproximadamente paralelos y tienen el mismo origen.
13
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
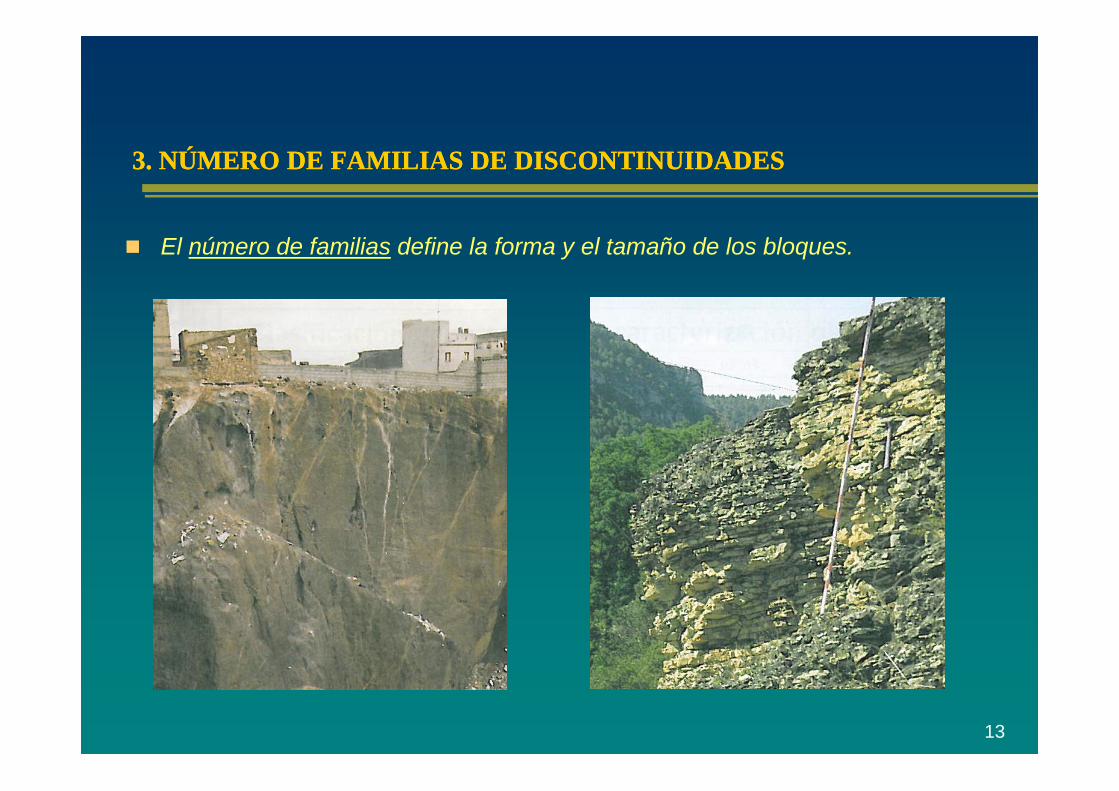
El número de familias define la forma y el tamaño de los bloques.
14
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
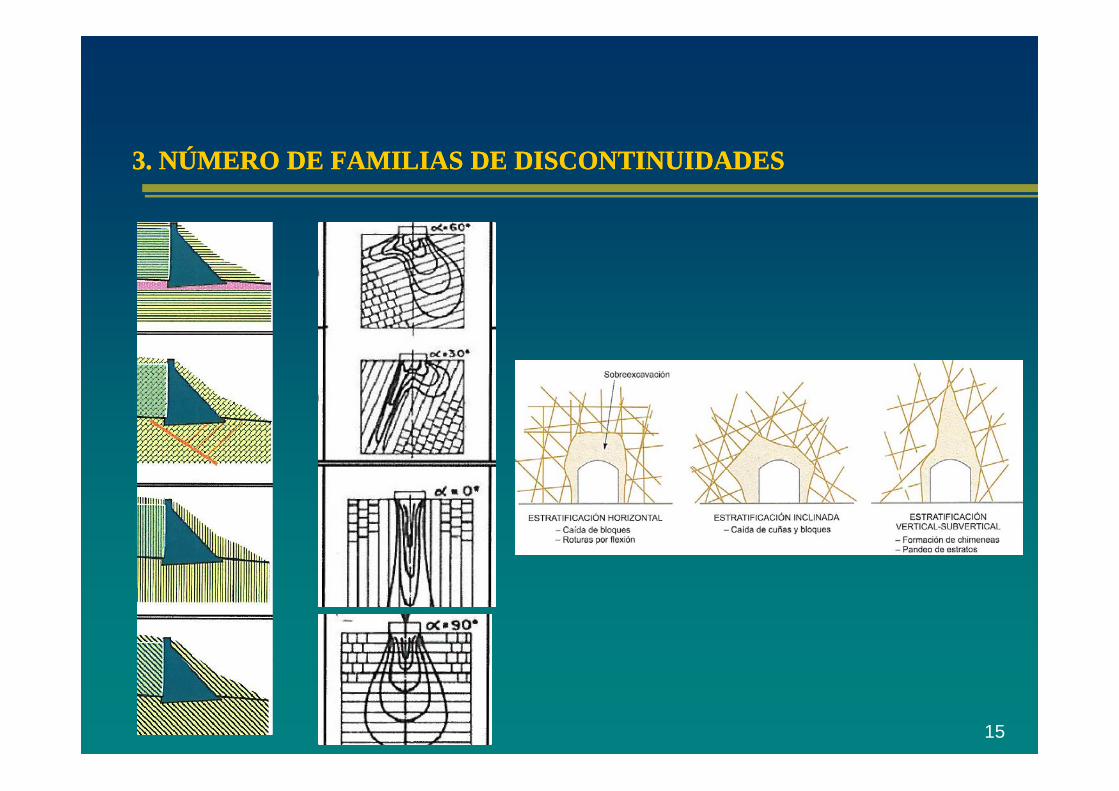
El número de familias y su orientación domina el comportamiento mecánico del medio rocoso y es determinante:
– En los problemas de estabilidad de túneles, presas y taludes.
– En los problemas de cimentaciones.
15
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
16
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
El número de familias puede describirse según el siguiente esquema:
– Roca masiva con singularidades– Una familia– Una familia y singularidades– Dos familias– Dos familias más singularidades– Tres familias– Tres familias más singularidades– Cuatro o más familias; macizo fuertemente diaclasado– Roca machacada; macizo parecido a un suelo
17
3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES3. NÚMERO DE FAMILIAS DE DISCONTINUIDADES
18
4. ORIENTACIÓN: Definiciones4. ORIENTACIÓN: Definiciones
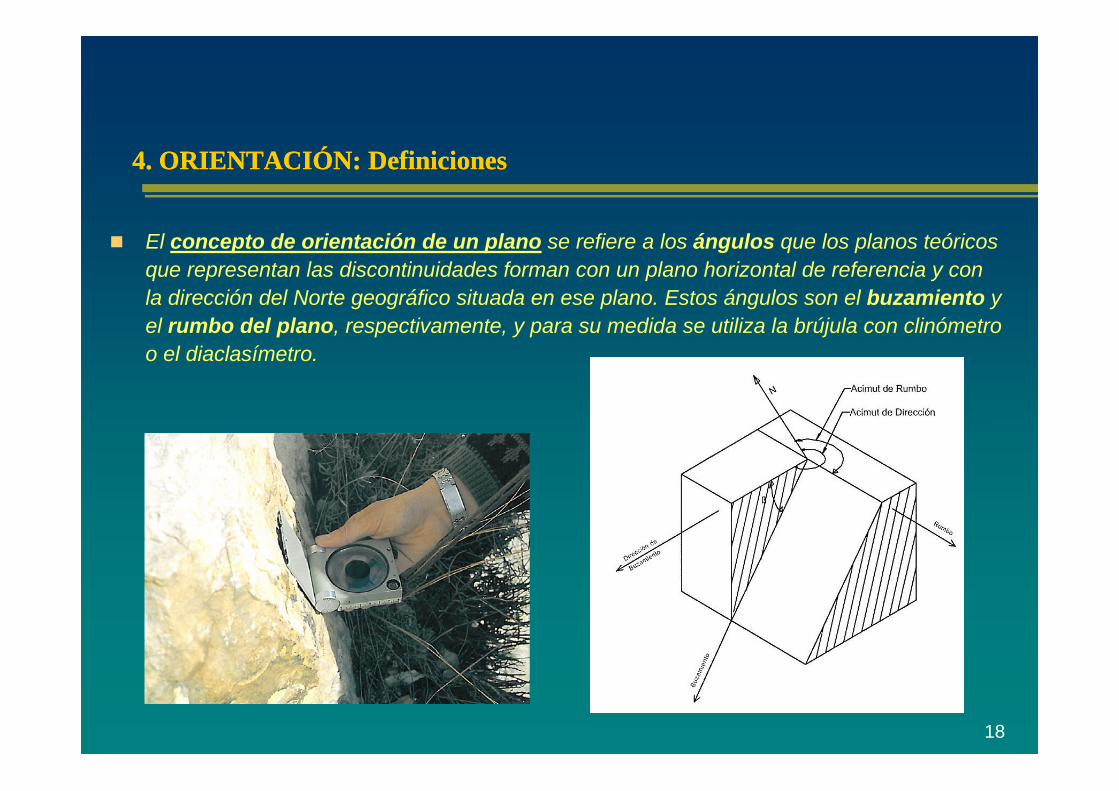
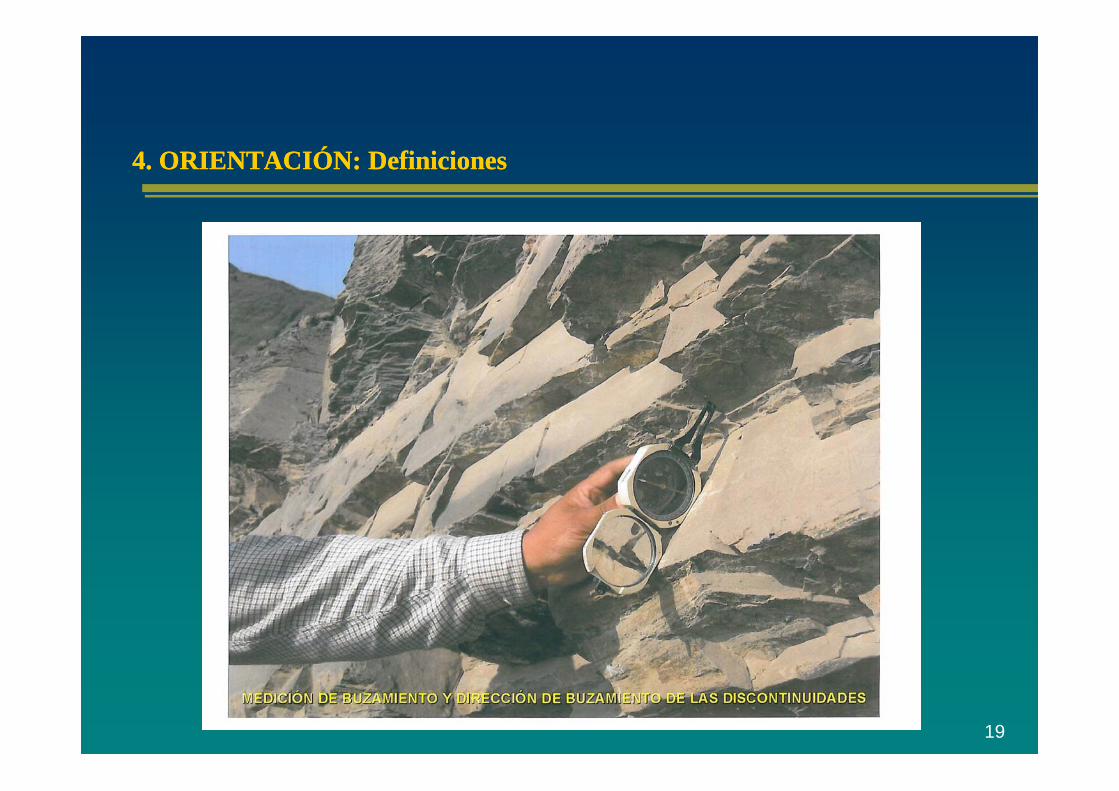
El concepto de orientación de un plano se refiere a los ángulos que los planos teóricos que representan las discontinuidades forman con un plano horizontal de referencia y con la dirección del Norte geográfico situada en ese plano. Estos ángulos son el buzamiento y el rumbo del plano, respectivamente, y para su medida se utiliza la brújula con clinómetro o el diaclasímetro.
19
4. ORIENTACIÓN: Definiciones4. ORIENTACIÓN: Definiciones
20
4. ORIENTACIÓN: Definiciones4. ORIENTACIÓN: Definiciones
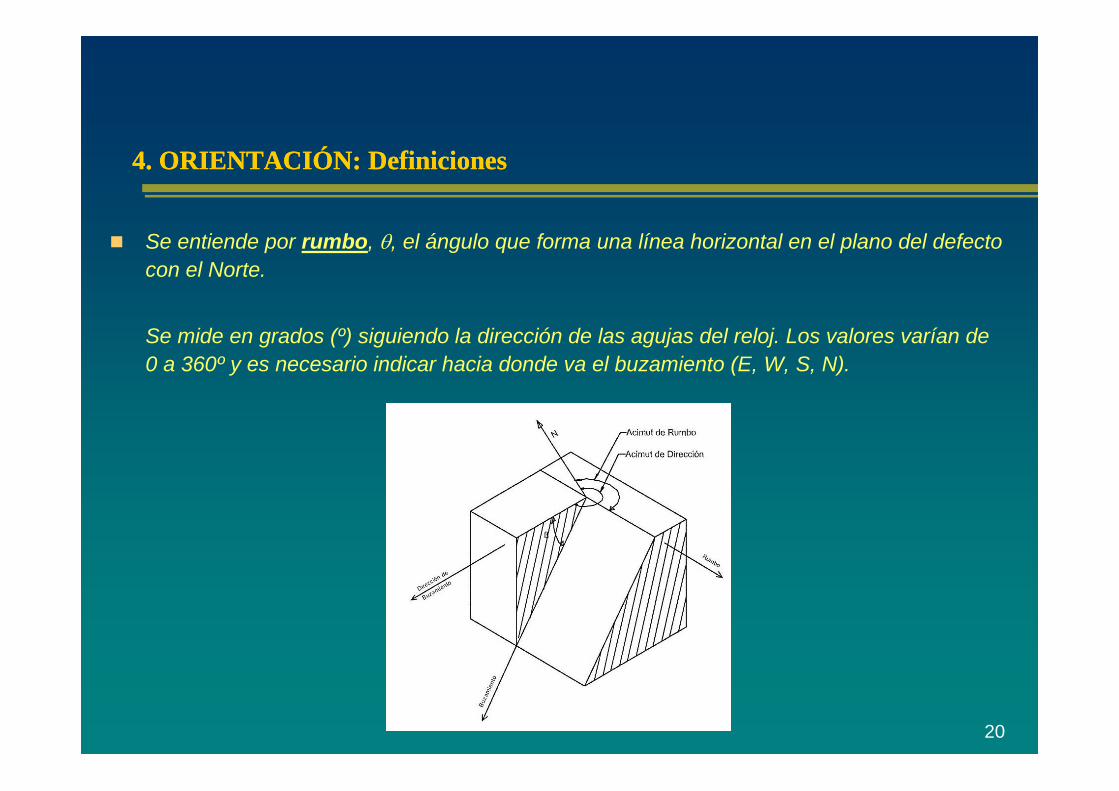
Se entiende por rumbo, θ, el ángulo que forma una línea horizontal en el plano del defecto con el Norte.
Se mide en grados (º) siguiendo la dirección de las agujas del reloj. Los valores varían de 0 a 360º y es necesario indicar hacia donde va el buzamiento (E, W, S, N).
21
4. ORIENTACIÓN: Definiciones4. ORIENTACIÓN: Definiciones
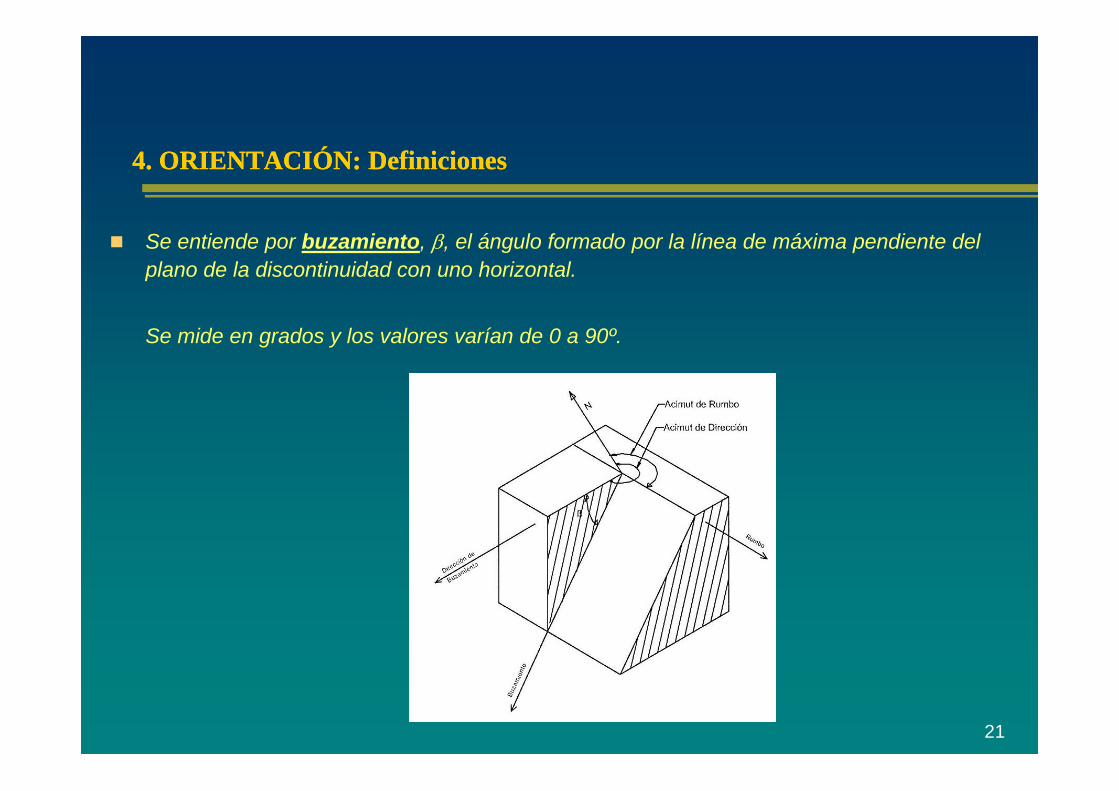
Se entiende por buzamiento, β, el ángulo formado por la línea de máxima pendiente del plano de la discontinuidad con uno horizontal.
Se mide en grados y los valores varían de 0 a 90º.
22
4. ORIENTACIÓN: Definiciones4. ORIENTACIÓN: Definiciones
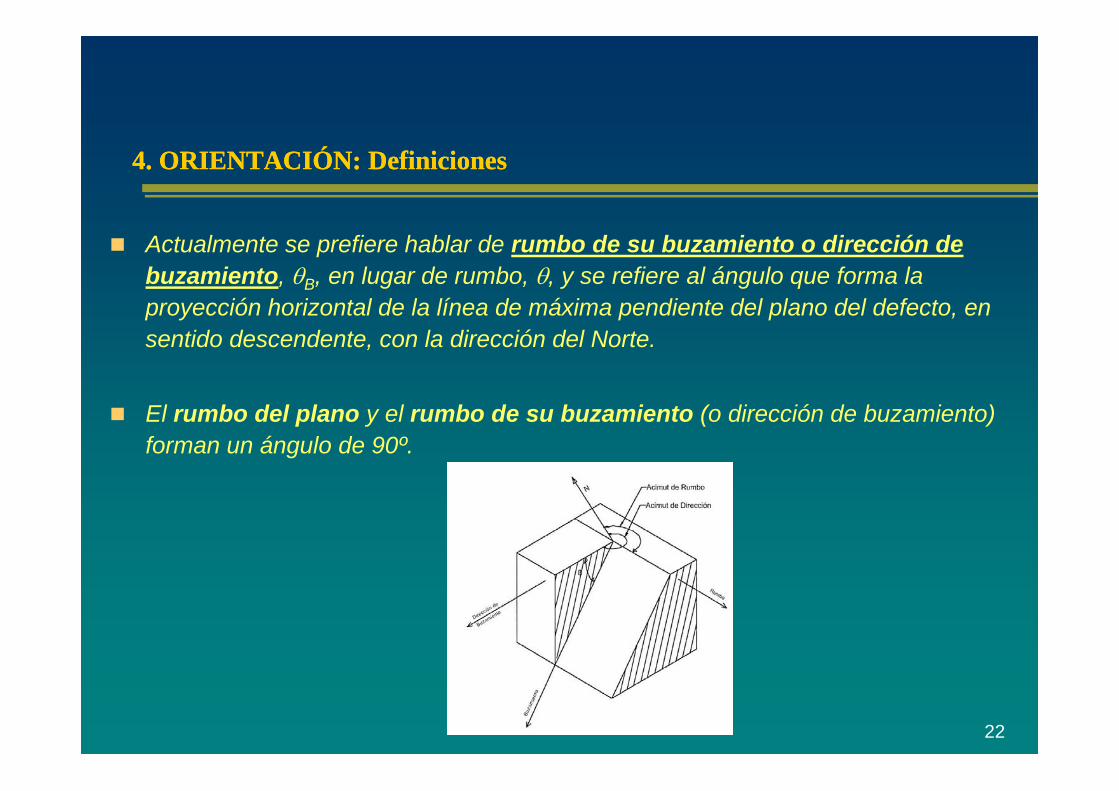
Actualmente se prefiere hablar de rumbo de su buzamiento o dirección de buzamiento, θB, en lugar de rumbo, θ, y se refiere al ángulo que forma la proyección horizontal de la línea de máxima pendiente del plano del defecto, en sentido descendente, con la dirección del Norte.
El rumbo del plano y el rumbo de su buzamiento (o dirección de buzamiento) forman un ángulo de 90º.
23
4. ORIENTACIÓN: Definiciones4. ORIENTACIÓN: Definiciones
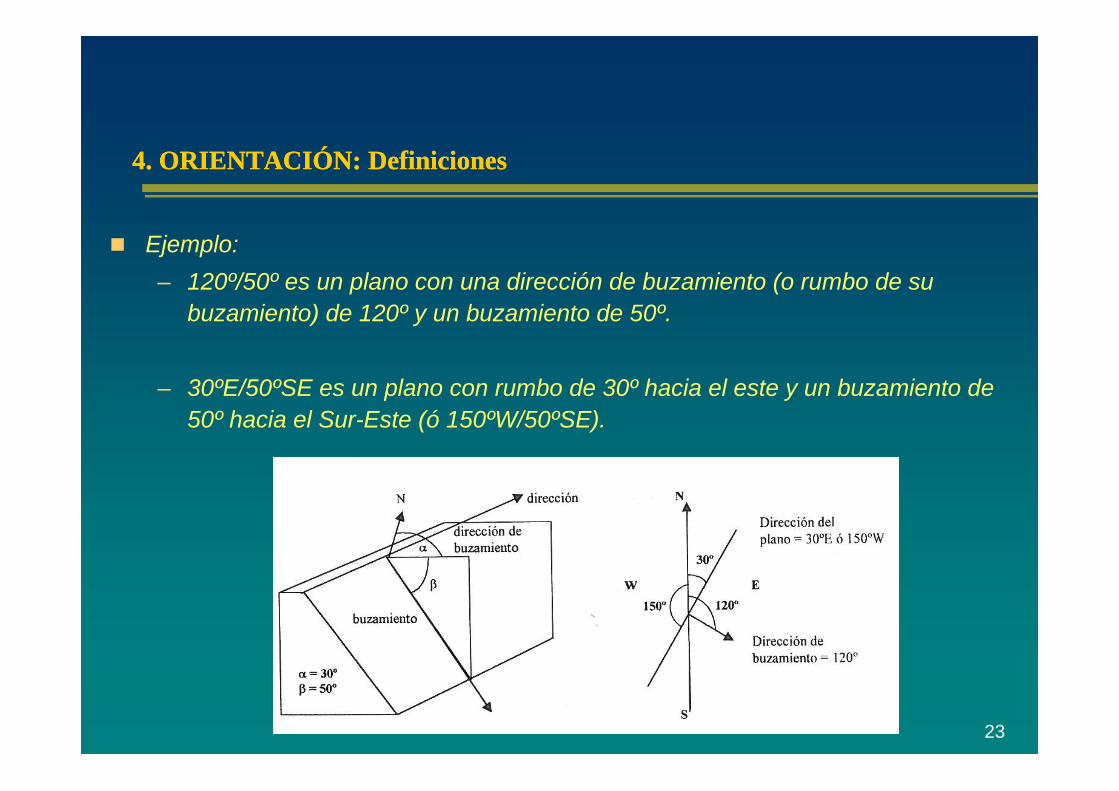
Ejemplo: – 120º/50º es un plano con una dirección de buzamiento (o rumbo de su
buzamiento) de 120º y un buzamiento de 50º.
– 30ºE/50ºSE es un plano con rumbo de 30º hacia el este y un buzamiento de 50º hacia el Sur-Este (ó 150ºW/50ºSE).
24
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
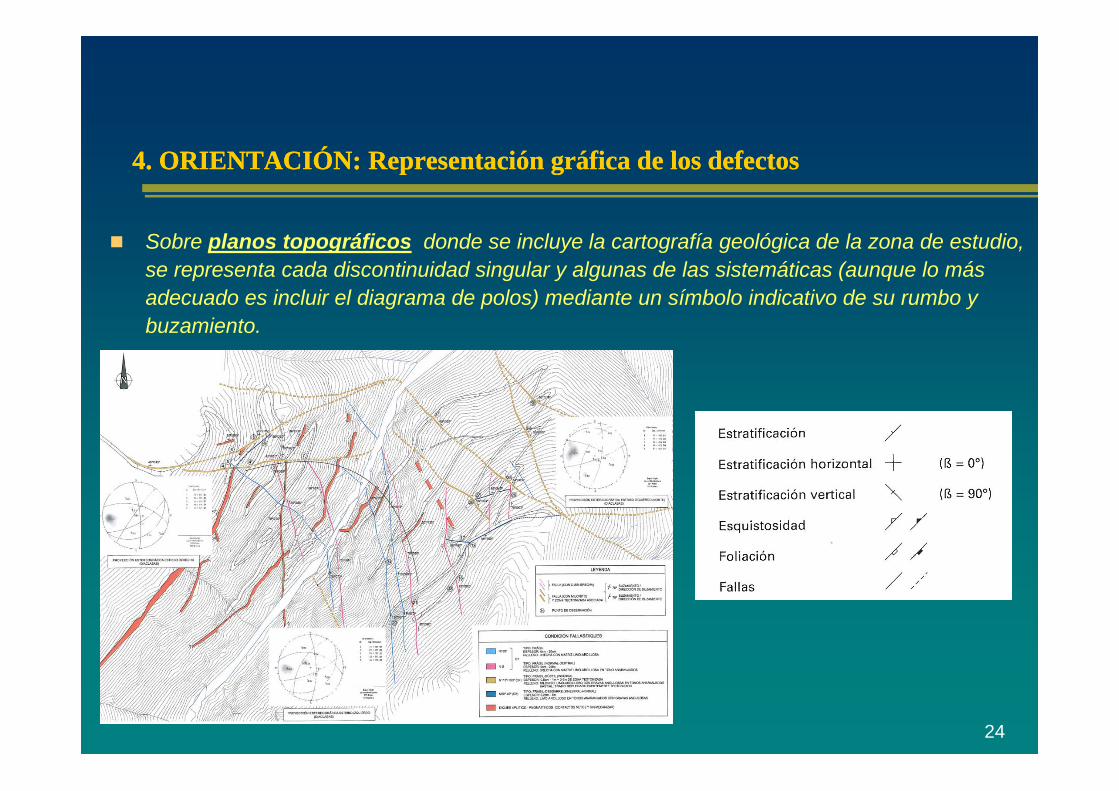
Sobre planos topográficos donde se incluye la cartografía geológica de la zona de estudio, se representa cada discontinuidad singular y algunas de las sistemáticas (aunque lo más adecuado es incluir el diagrama de polos) mediante un símbolo indicativo de su rumbo y buzamiento.
25
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
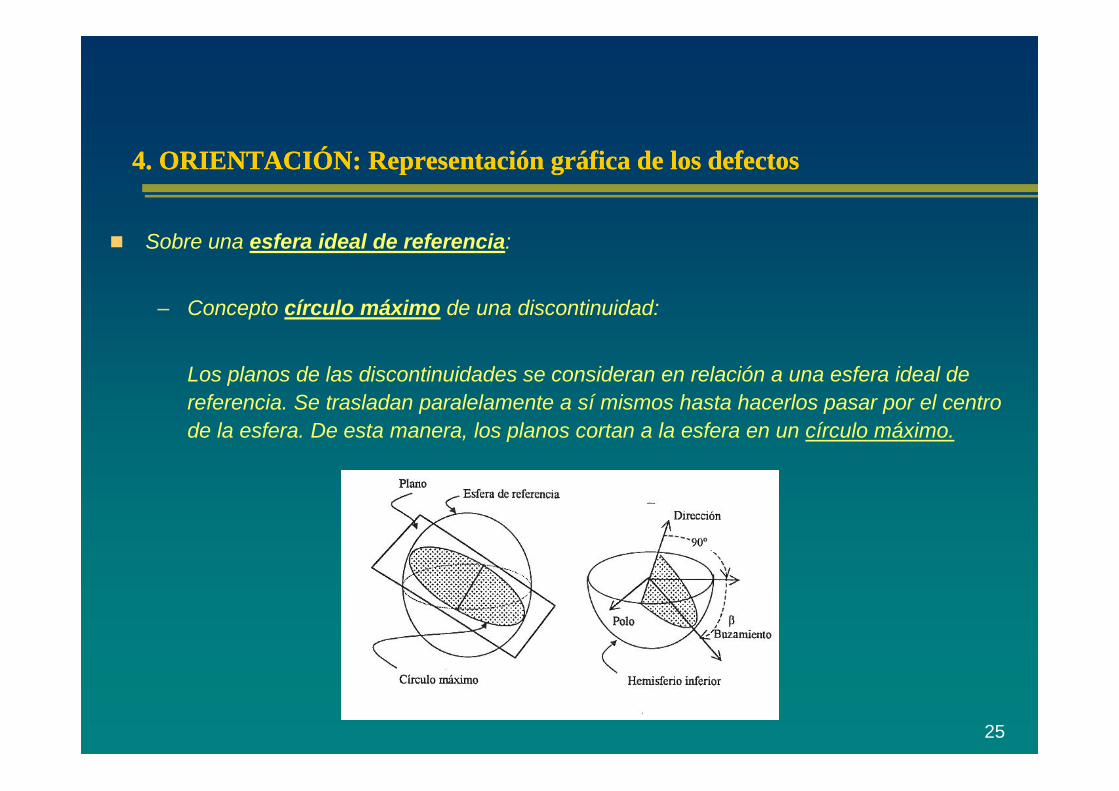
Sobre una esfera ideal de referencia:
– Concepto círculo máximo de una discontinuidad:
Los planos de las discontinuidades se consideran en relación a una esfera ideal de referencia. Se trasladan paralelamente a sí mismos hasta hacerlos pasar por el centro de la esfera. De esta manera, los planos cortan a la esfera en un círculo máximo.
26
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
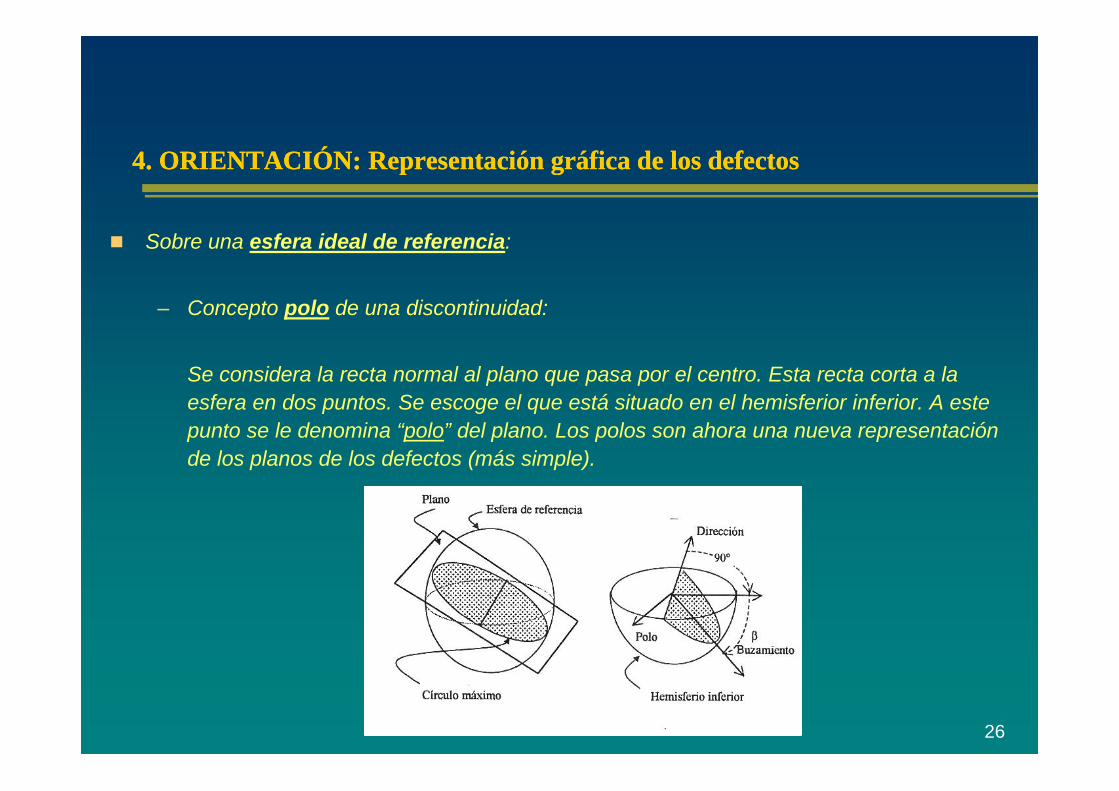
Sobre una esfera ideal de referencia:
– Concepto polo de una discontinuidad:
Se considera la recta normal al plano que pasa por el centro. Esta recta corta a la esfera en dos puntos. Se escoge el que está situado en el hemisferior inferior. A este punto se le denomina “polo” del plano. Los polos son ahora una nueva representación de los planos de los defectos (más simple).
27
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
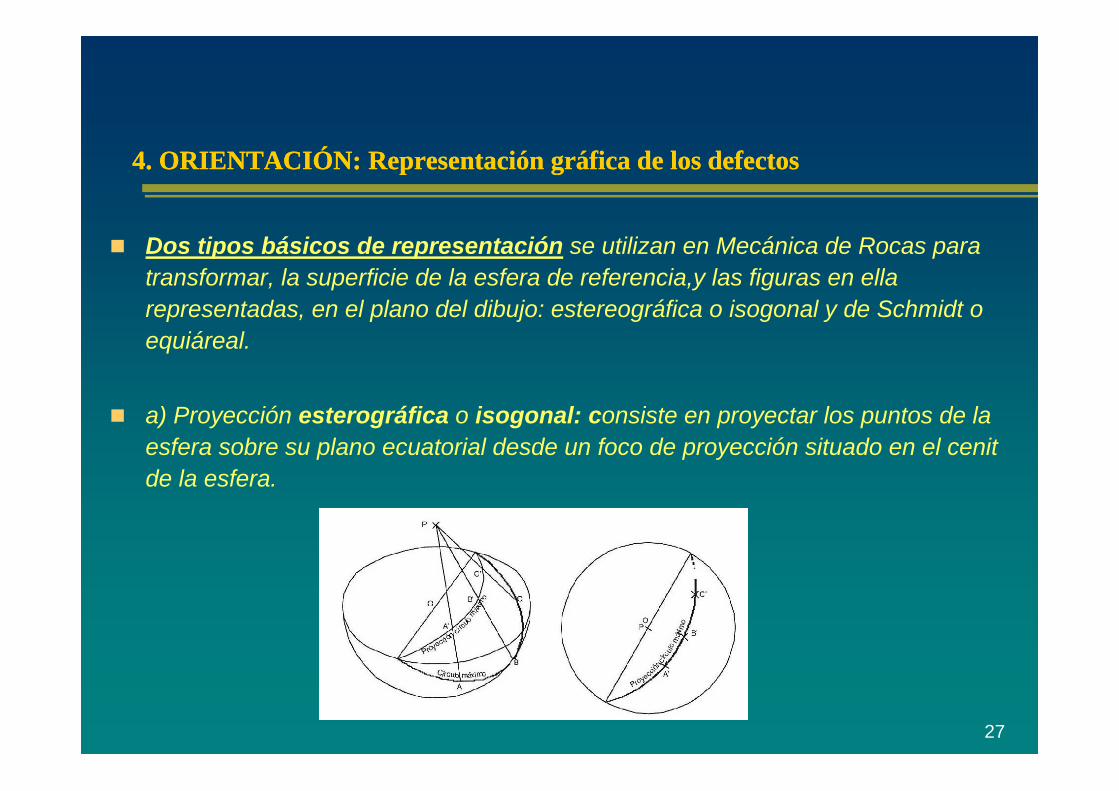
Dos tipos básicos de representación se utilizan en Mecánica de Rocas para transformar, la superficie de la esfera de referencia,y las figuras en ella representadas, en el plano del dibujo: estereográfica o isogonal y de Schmidt o equiáreal.
a) Proyección esterográfica o isogonal: consiste en proyectar los puntos de la esfera sobre su plano ecuatorial desde un foco de proyección situado en el cenit de la esfera.
28
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
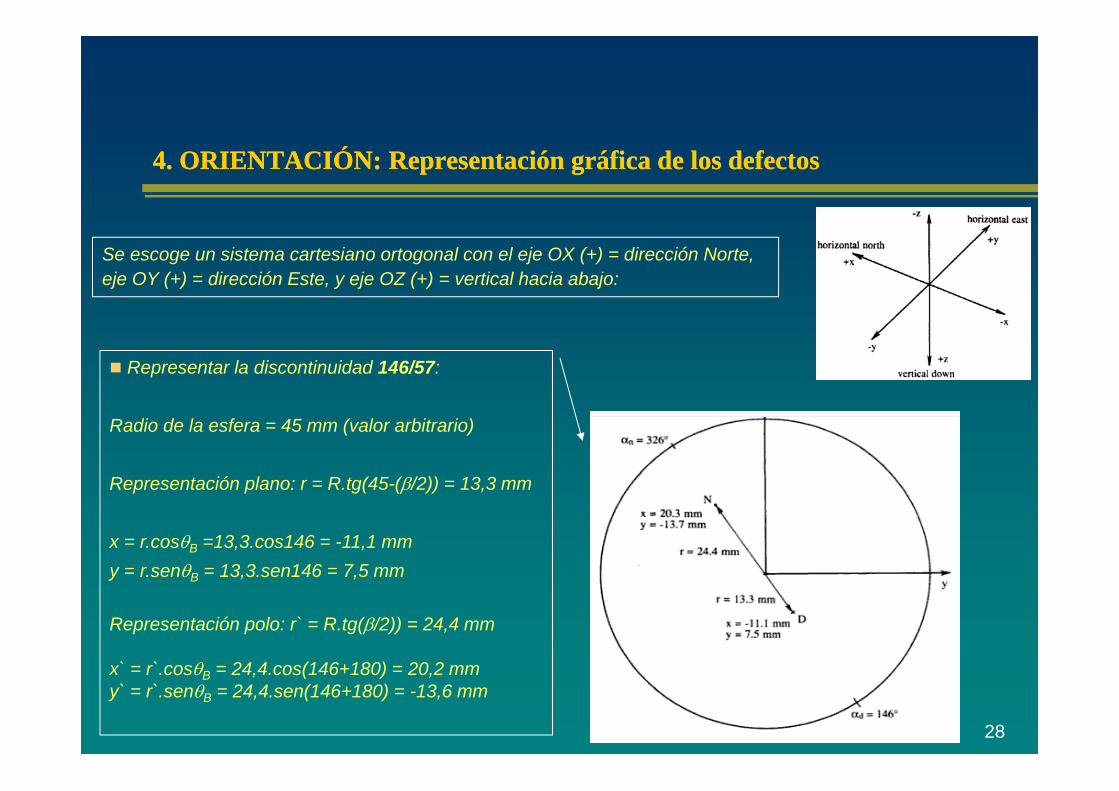
Se escoge un sistema cartesiano ortogonal con el eje OX (+) = dirección Norte, eje OY (+) = dirección Este, y eje OZ (+) = vertical hacia abajo:
Representar la discontinuidad 146/57:
Radio de la esfera = 45 mm (valor arbitrario)
Representación plano: r = R.tg(45-(β/2)) = 13,3 mm
x = r.cosθB =13,3.cos146 = -11,1 mmy = r.senθB = 13,3.sen146 = 7,5 mm
Representación polo: r` = R.tg(β/2)) = 24,4 mm
x` = r`.cosθB = 24,4.cos(146+180) = 20,2 mmy` = r`.senθB = 24,4.sen(146+180) = -13,6 mm
29
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
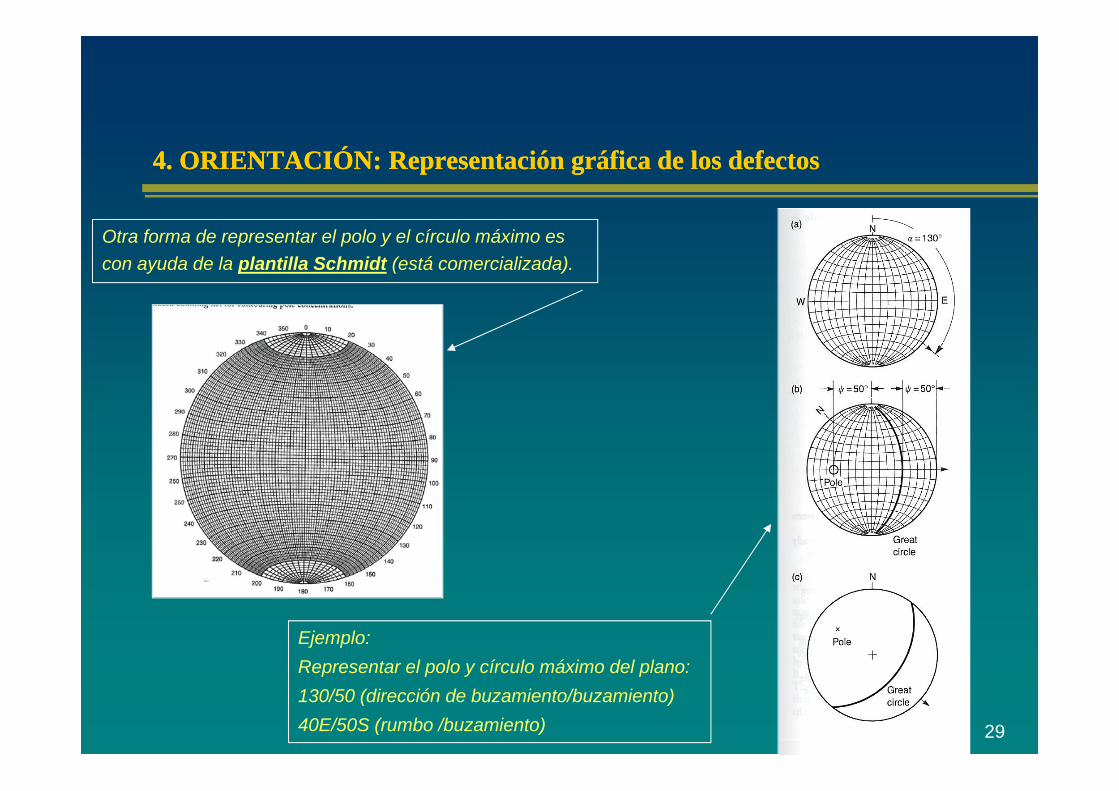
Otra forma de representar el polo y el círculo máximo es con ayuda de la plantilla Schmidt (está comercializada).
Ejemplo: Representar el polo y círculo máximo del plano:130/50 (dirección de buzamiento/buzamiento)40E/50S (rumbo /buzamiento)
30
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
La proyección estereográfica o isogonal tiene dos ventajas:
* Los círculos máximos sobre la superficie esférica se proyectan según círculos sobre el plano ecuatorial.
* Los ángulos que se cortan dos defectos se conservan.
Por estas razones, la proyección estereográfica es muy conveniente para resolver problemas en que intervengan direcciones, tales como incidencias de empujes sobre planos, relaciones angulares entre planos, etc.

31
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
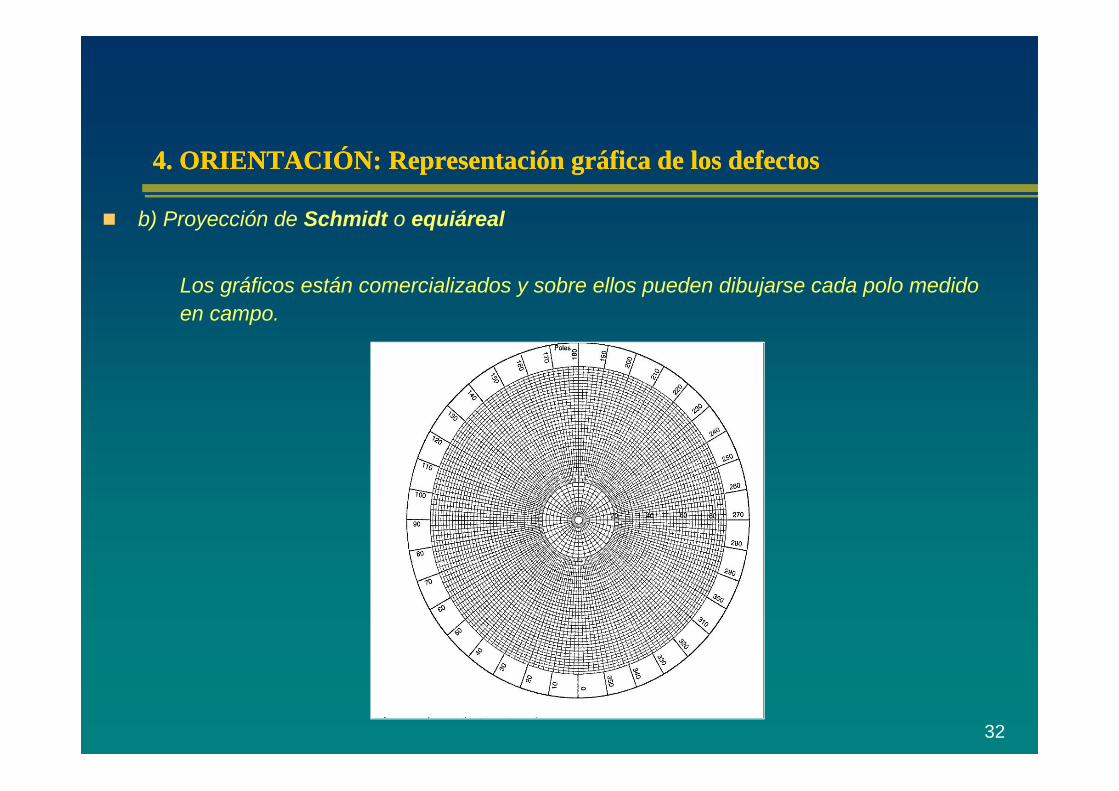
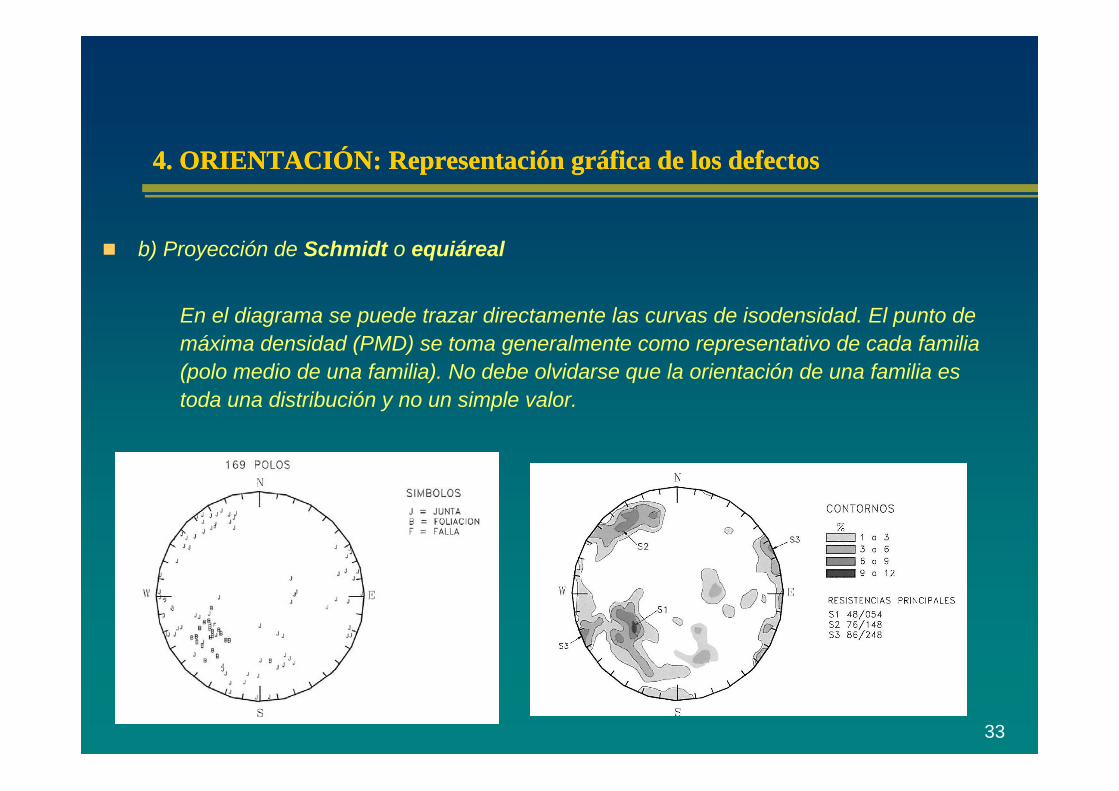
b) Proyección de Schmidt o equiáreal
La proyección equiáreal conserva las igualdad de áreas mientras que la proyección estereográfica no.
Es muy importante conocer la densidad de la distribución espacial de los polos de las discontinuidades sobre la esfera de referencia.
La proyección de un polo P se obtiene por abatimiento sobre un plano horizontal tangente en el nadir de la esfera.
32
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
b) Proyección de Schmidt o equiáreal
Los gráficos están comercializados y sobre ellos pueden dibujarse cada polo medido en campo.
33
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
b) Proyección de Schmidt o equiáreal
En el diagrama se puede trazar directamente las curvas de isodensidad. El punto de máxima densidad (PMD) se toma generalmente como representativo de cada familia (polo medio de una familia). No debe olvidarse que la orientación de una familia es toda una distribución y no un simple valor.
34
4. ORIENTACIÓN: Representación gráfica de los defectos4. ORIENTACIÓN: Representación gráfica de los defectos
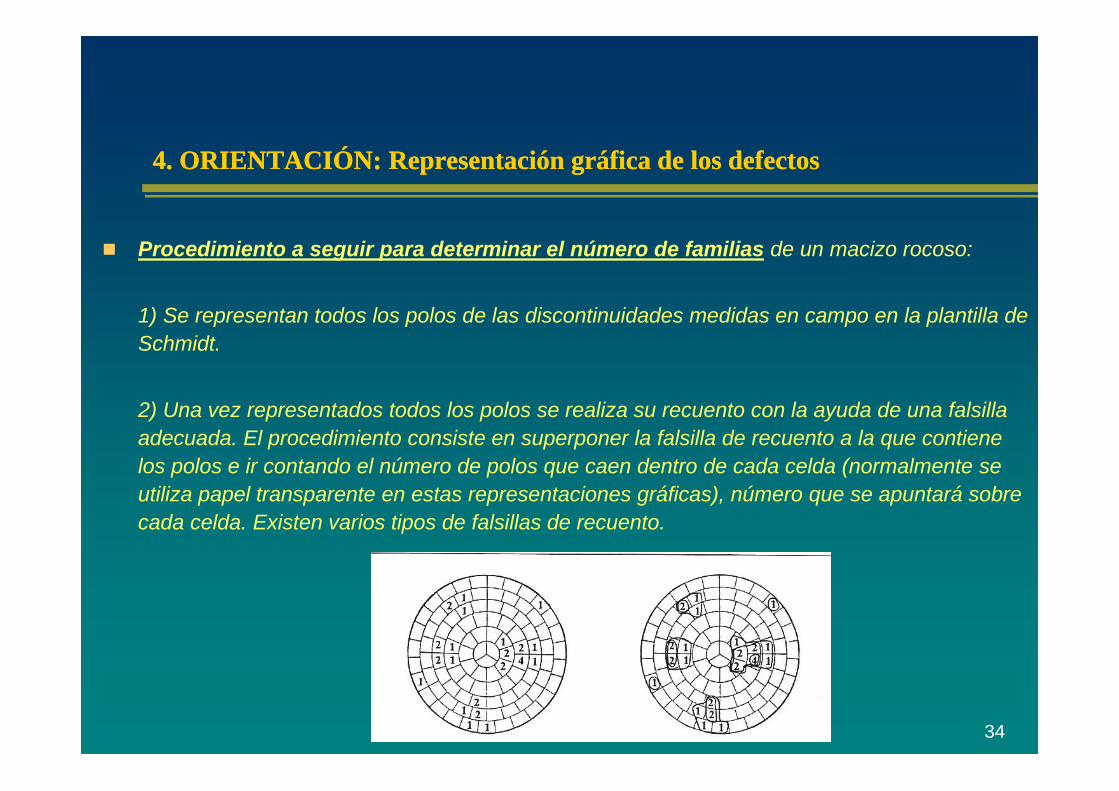
Procedimiento a seguir para determinar el número de familias de un macizo rocoso:
1) Se representan todos los polos de las discontinuidades medidas en campo en la plantilla de Schmidt.
2) Una vez representados todos los polos se realiza su recuento con la ayuda de una falsilla adecuada. El procedimiento consiste en superponer la falsilla de recuento a la que contiene los polos e ir contando el número de polos que caen dentro de cada celda (normalmente se utiliza papel transparente en estas representaciones gráficas), número que se apuntará sobre cada celda. Existen varios tipos de falsillas de recuento.
35
4. ORIENTACIÓN4. ORIENTACIÓN
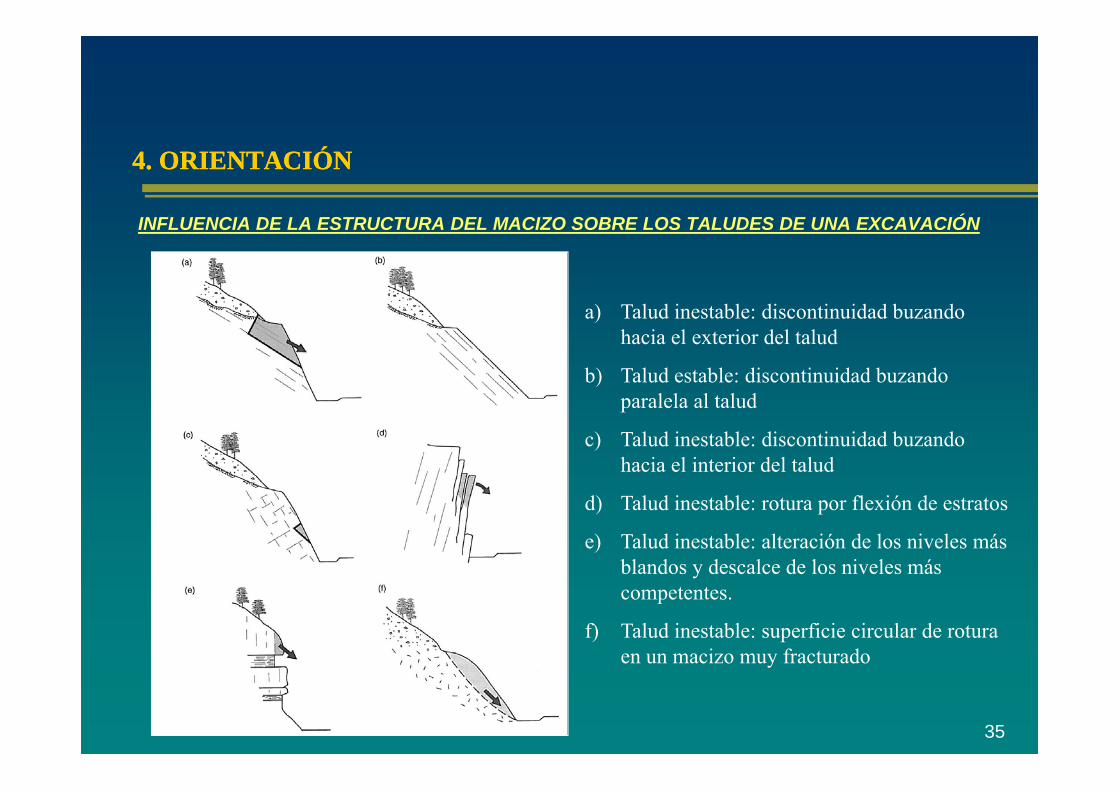
INFLUENCIA DE LA ESTRUCTURA DEL MACIZO SOBRE LOS TALUDES DE UNA EXCAVACIÓN
a) Talud inestable: discontinuidad buzando hacia el exterior del talud
b) Talud estable: discontinuidad buzando paralela al talud
c) Talud inestable: discontinuidad buzando hacia el interior del talud
d) Talud inestable: rotura por flexión de estratos
e) Talud inestable: alteración de los niveles más blandos y descalce de los niveles más competentes.
f) Talud inestable: superficie circular de rotura en un macizo muy fracturado
36
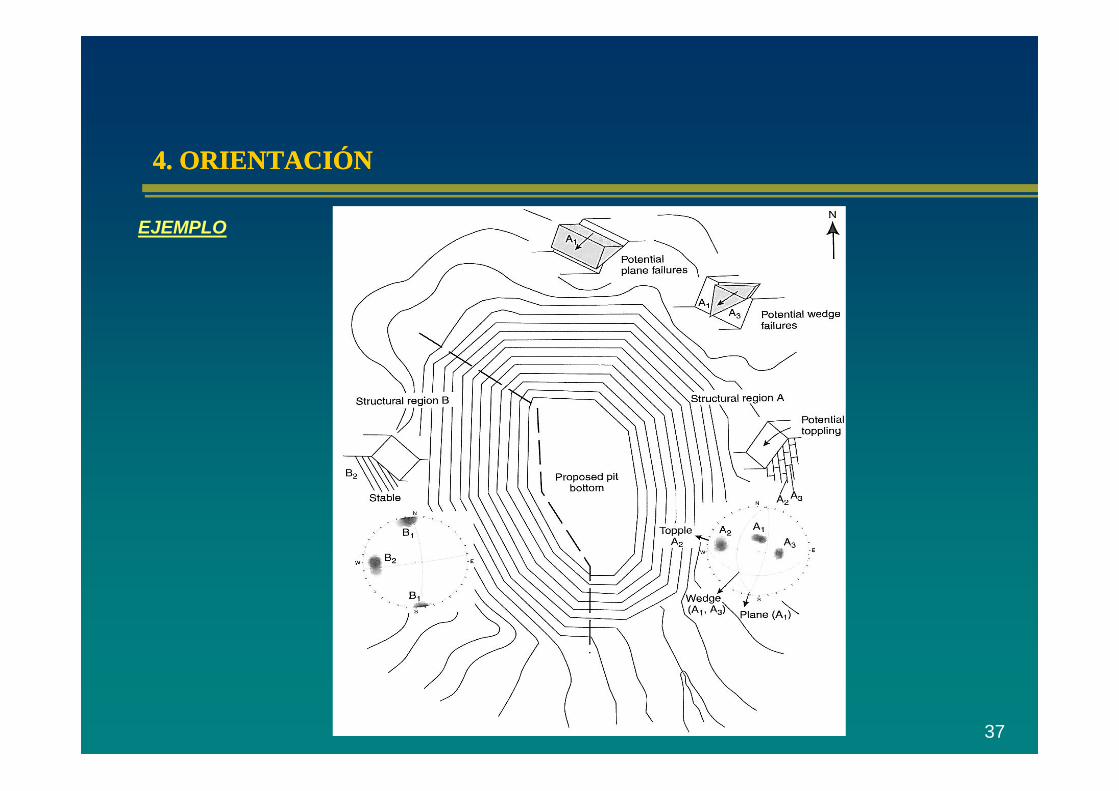
4. ORIENTACIÓN4. ORIENTACIÓN
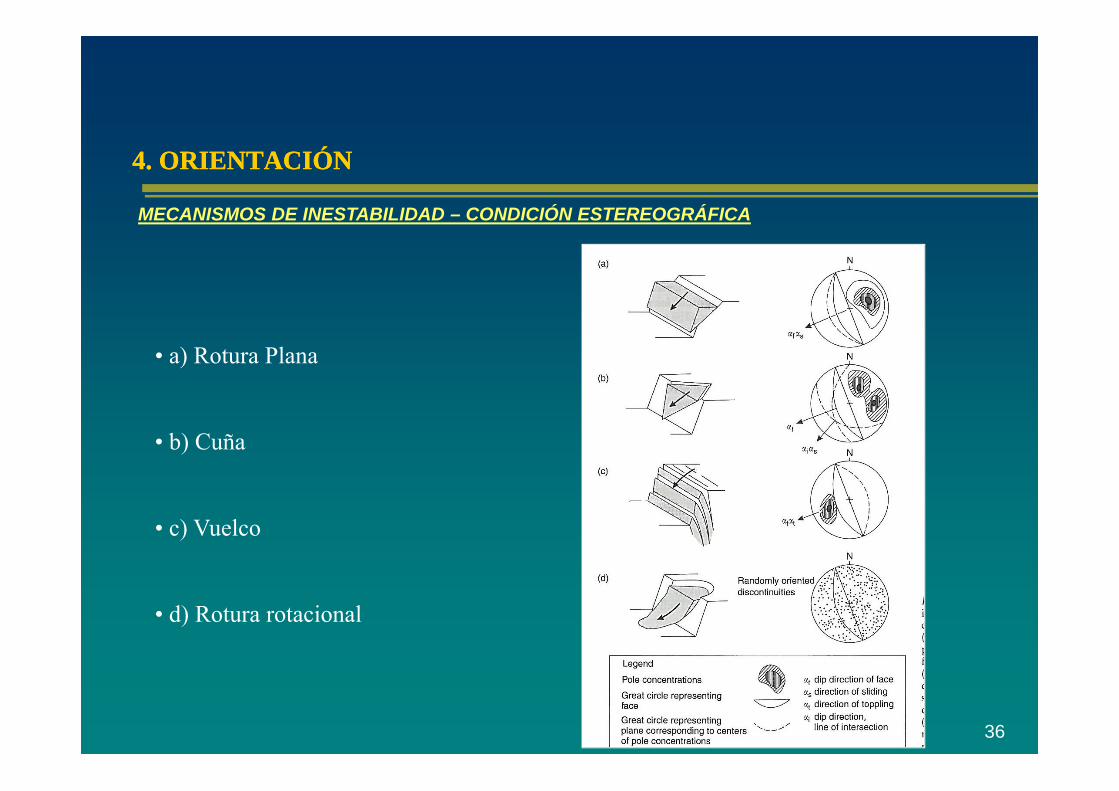
• a) Rotura Plana
• b) Cuña
• c) Vuelco
• d) Rotura rotacional
MECANISMOS DE INESTABILIDAD – CONDICIÓN ESTEREOGRÁFICA
37
4. ORIENTACIÓN4. ORIENTACIÓN
EJEMPLO
38
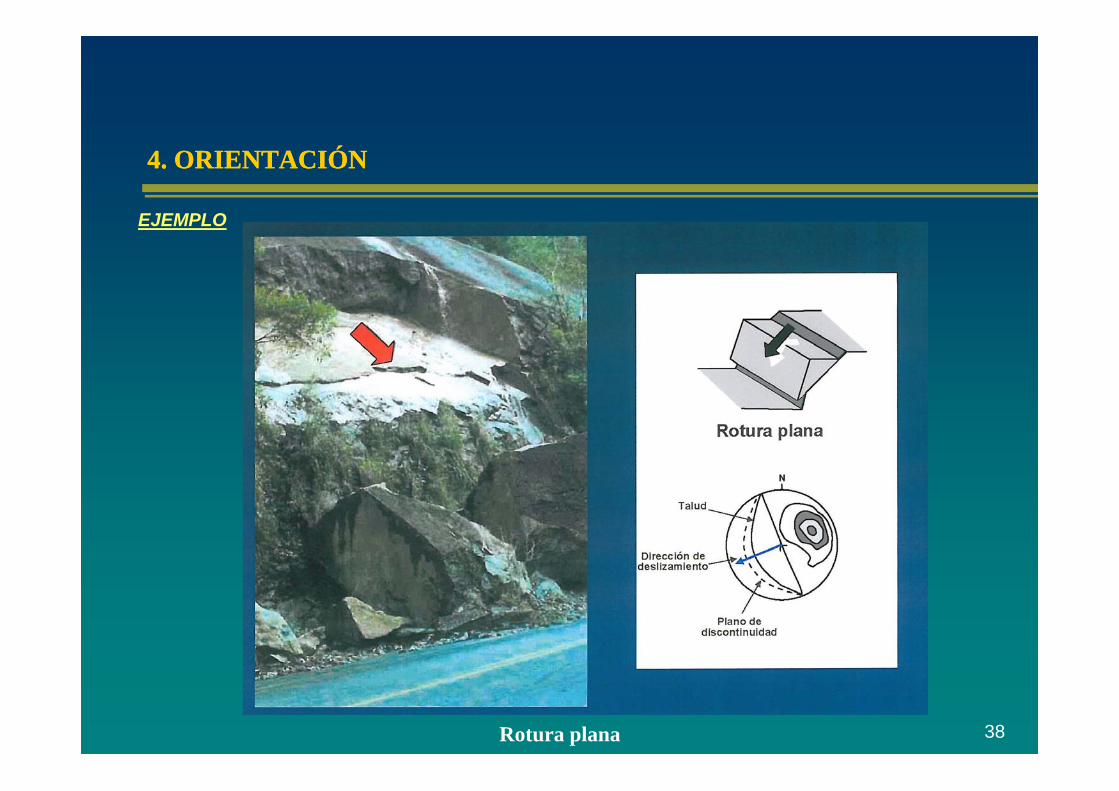
4. ORIENTACIÓN4. ORIENTACIÓN
EJEMPLO
Rotura plana
39
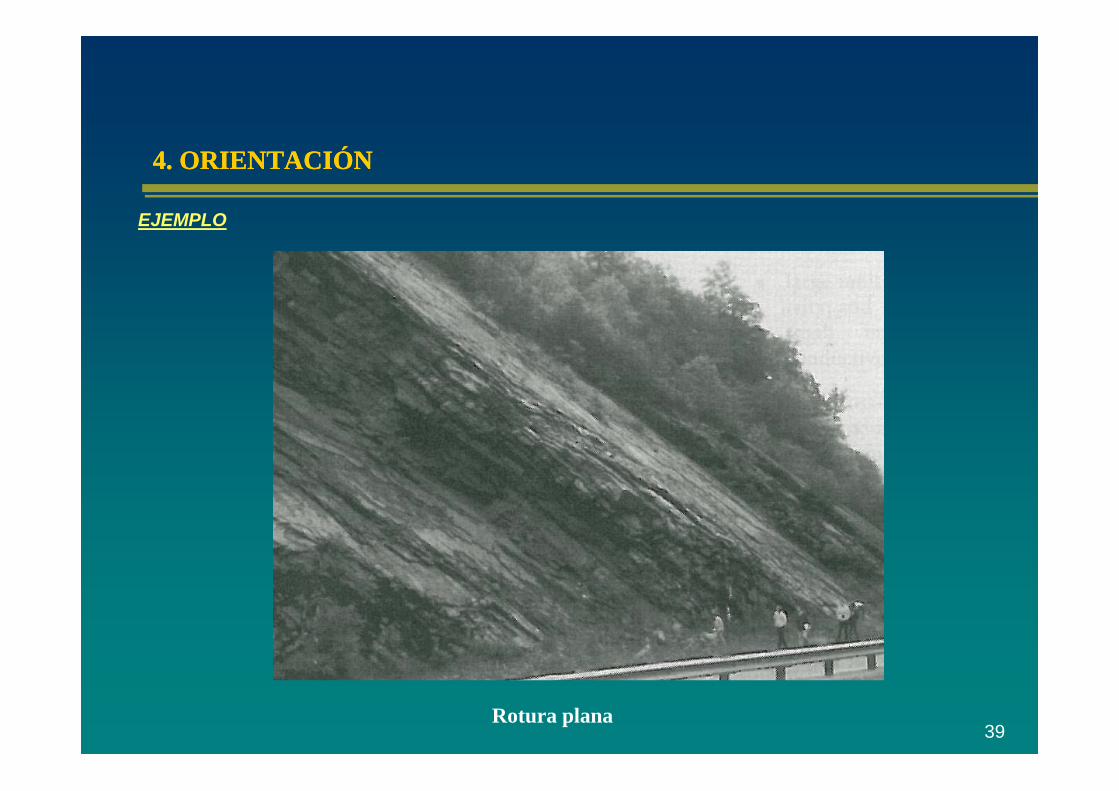
4. ORIENTACIÓN4. ORIENTACIÓN
EJEMPLO
Rotura plana
40
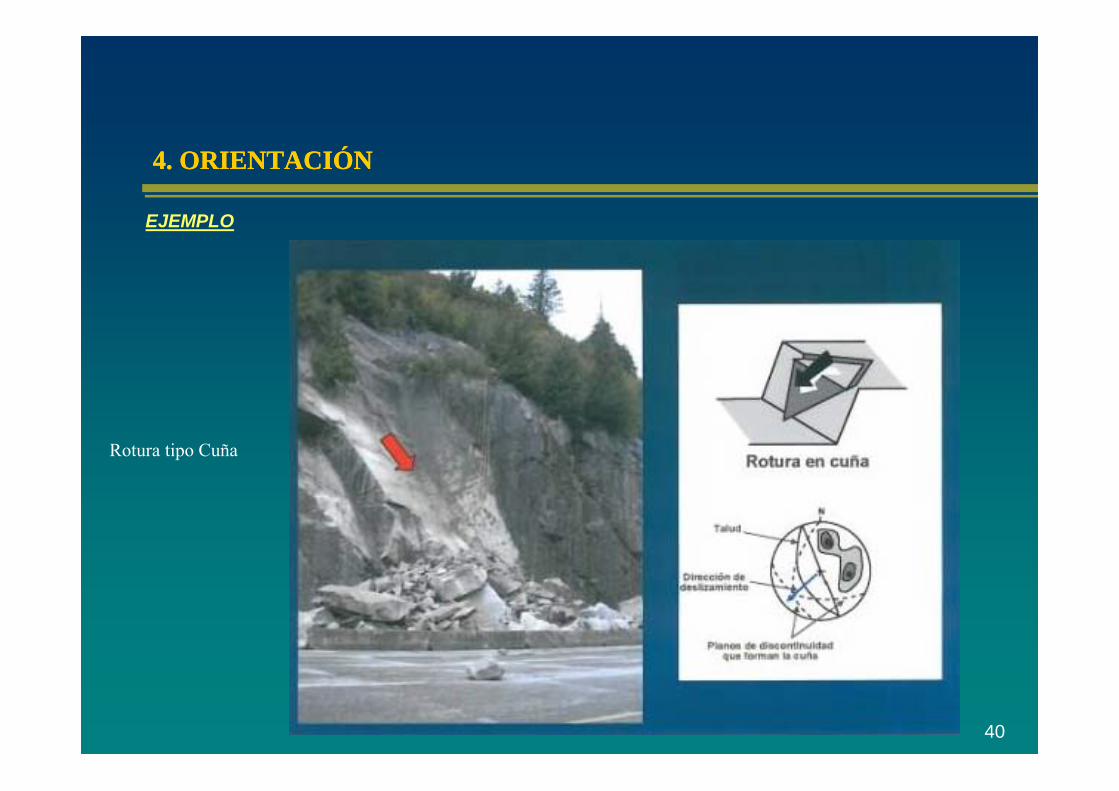
4. ORIENTACIÓN4. ORIENTACIÓN
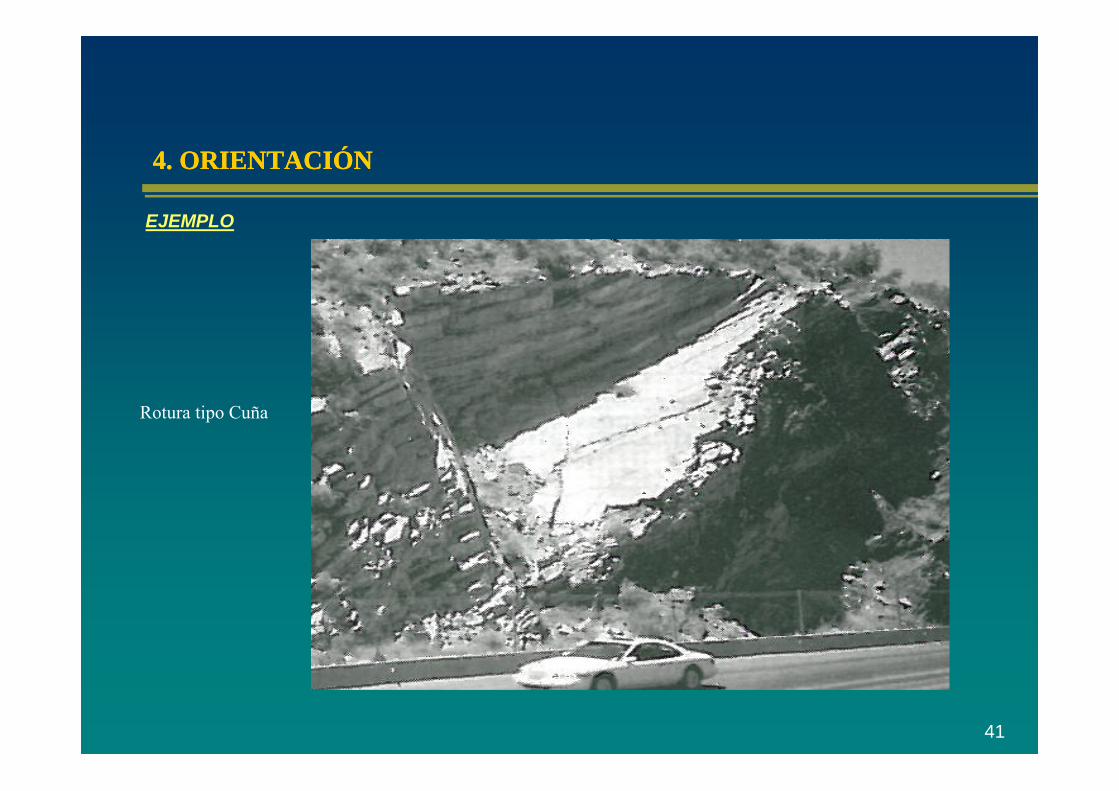
EJEMPLO
Rotura tipo Cuña
41
4. ORIENTACIÓN4. ORIENTACIÓN
EJEMPLO
Rotura tipo Cuña
42
4. ORIENTACIÓN4. ORIENTACIÓN
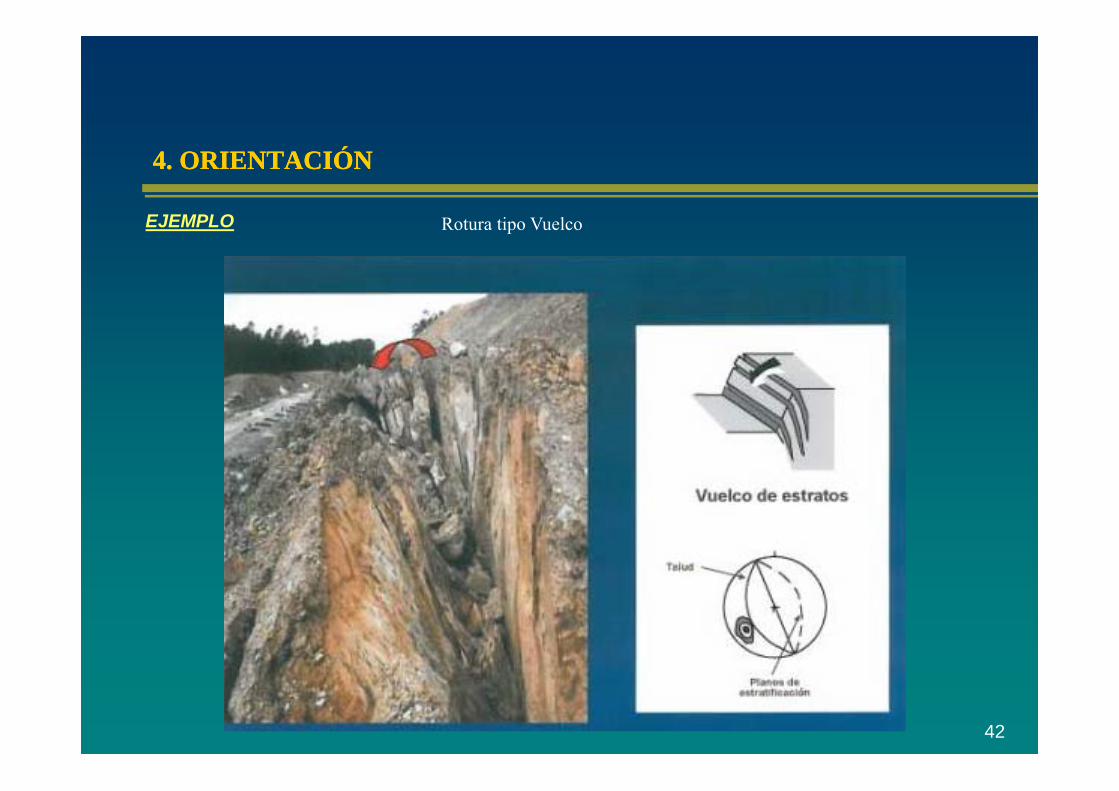
EJEMPLO Rotura tipo Vuelco
43
4. ORIENTACIÓN4. ORIENTACIÓN
EJEMPLO
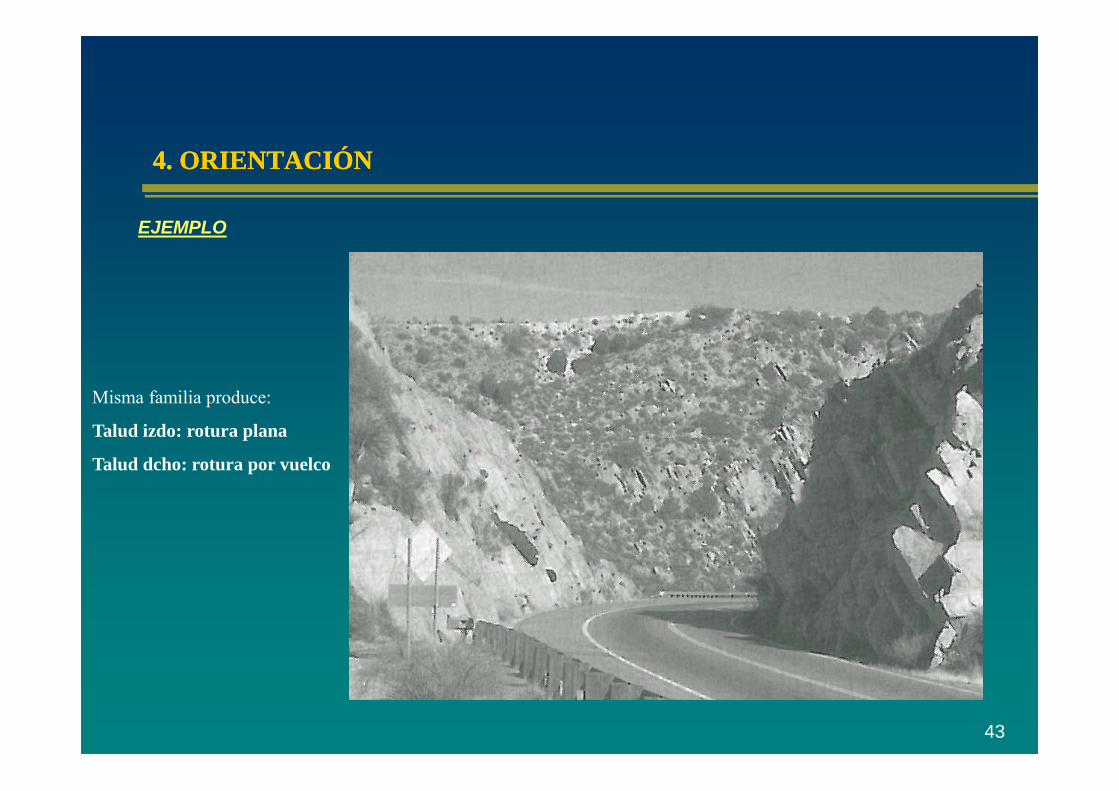
Misma familia produce:
Talud izdo: rotura plana
Talud dcho: rotura por vuelco
44
4. ORIENTACIÓN: Representación vectorial de los defectos4. ORIENTACIÓN: Representación vectorial de los defectos
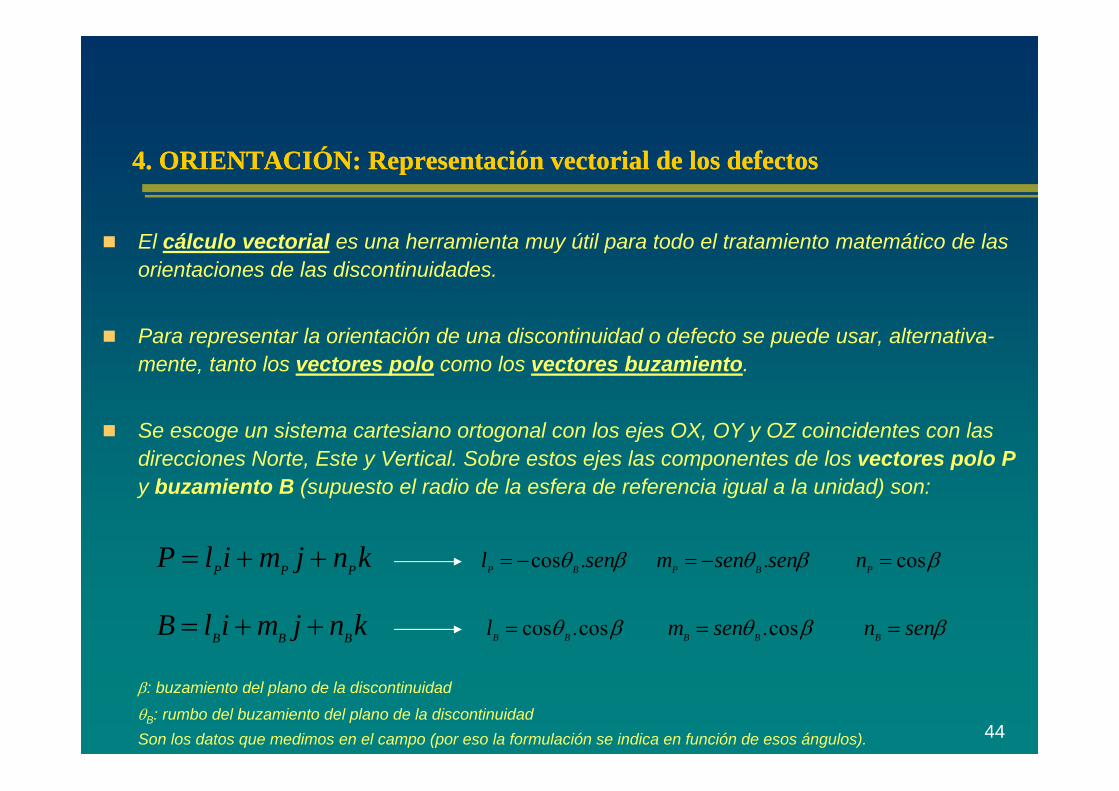
El cálculo vectorial es una herramienta muy útil para todo el tratamiento matemático de las orientaciones de las discontinuidades.
Para representar la orientación de una discontinuidad o defecto se puede usar, alternativa-mente, tanto los vectores polo como los vectores buzamiento.
Se escoge un sistema cartesiano ortogonal con los ejes OX, OY y OZ coincidentes con las direcciones Norte, Este y Vertical. Sobre estos ejes las componentes de los vectores polo Py buzamiento B (supuesto el radio de la esfera de referencia igual a la unidad) son:
β: buzamiento del plano de la discontinuidad
θB: rumbo del buzamiento del plano de la discontinuidadSon los datos que medimos en el campo (por eso la formulación se indica en función de esos ángulos).
knjmilP PPP ++= βθ senl BP .cos−= βθ sensenm BP .−= βcos=Pn
knjmilB BBB ++= βθ cos.cos BBl = βθ cos.BB senm = βsennB =
45
4. ORIENTACIÓN: Representación vectorial de los defectos4. ORIENTACIÓN: Representación vectorial de los defectos
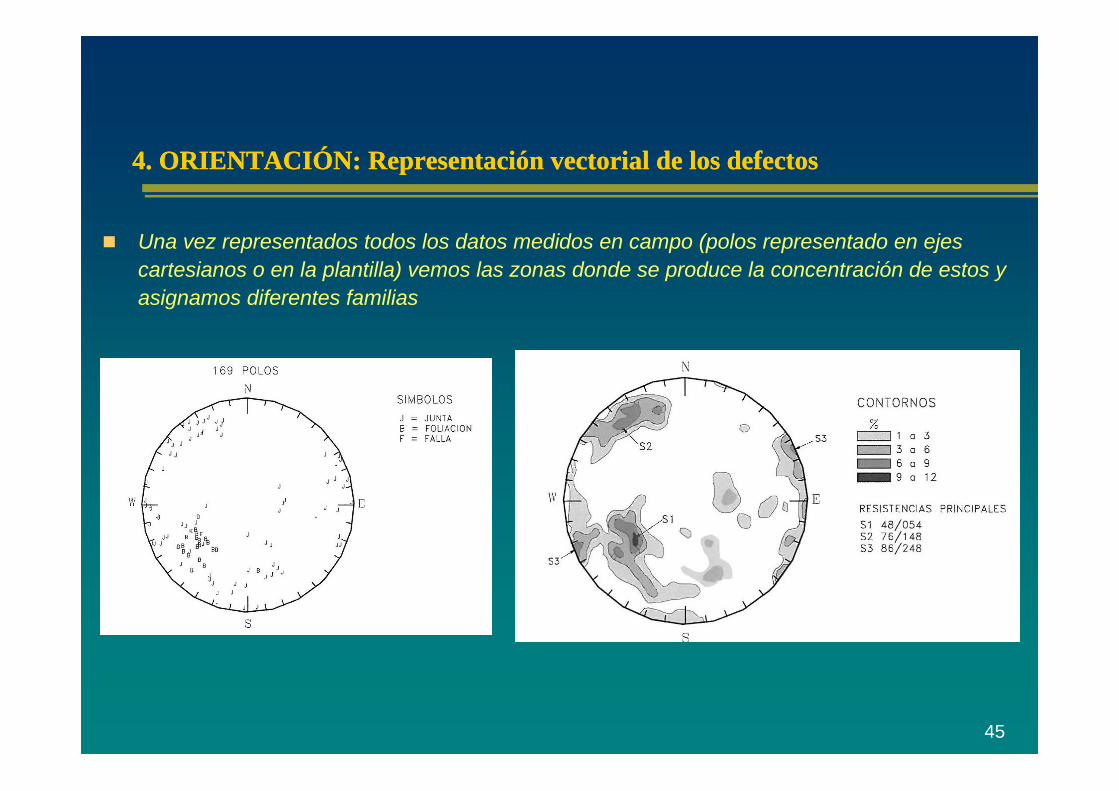
Una vez representados todos los datos medidos en campo (polos representado en ejes cartesianos o en la plantilla) vemos las zonas donde se produce la concentración de estos y asignamos diferentes familias
46
4. ORIENTACIÓN: Representación vectorial de los defectos4. ORIENTACIÓN: Representación vectorial de los defectos
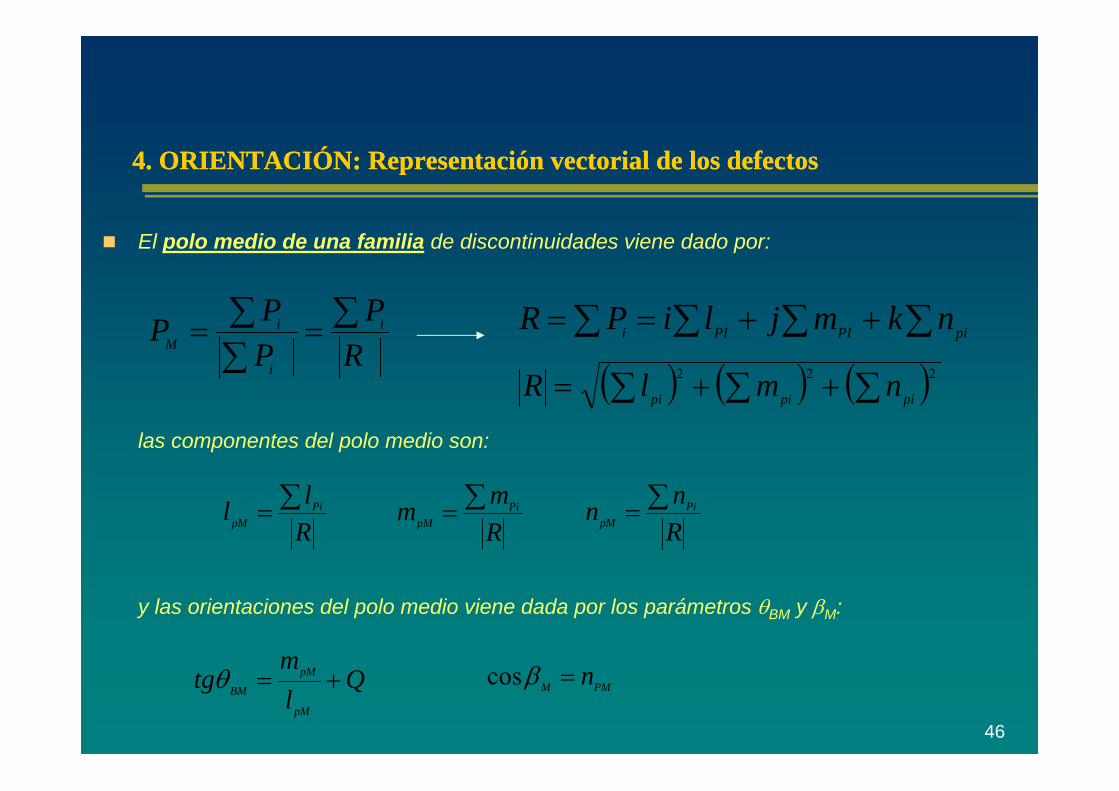
El polo medio de una familia de discontinuidades viene dado por:
las componentes del polo medio son:
y las orientaciones del polo medio viene dada por los parámetros θBM y βM:
RP
PPP i
i
iM
∑∑∑ == ∑ ∑ ∑∑ ++== piPIPIi nkmjliPR
( ) ( ) ( )222 ∑∑∑ ++= pipipi nmlR
Rll Pi
pM
∑=Rmm Pi
pM
∑=Rnn Pi
pM
∑=
Qlm
tgpM
pMBM +=θ PMM n=βcos
47
4. ORIENTACIÓN: Representación vectorial de los defectos4. ORIENTACIÓN: Representación vectorial de los defectos
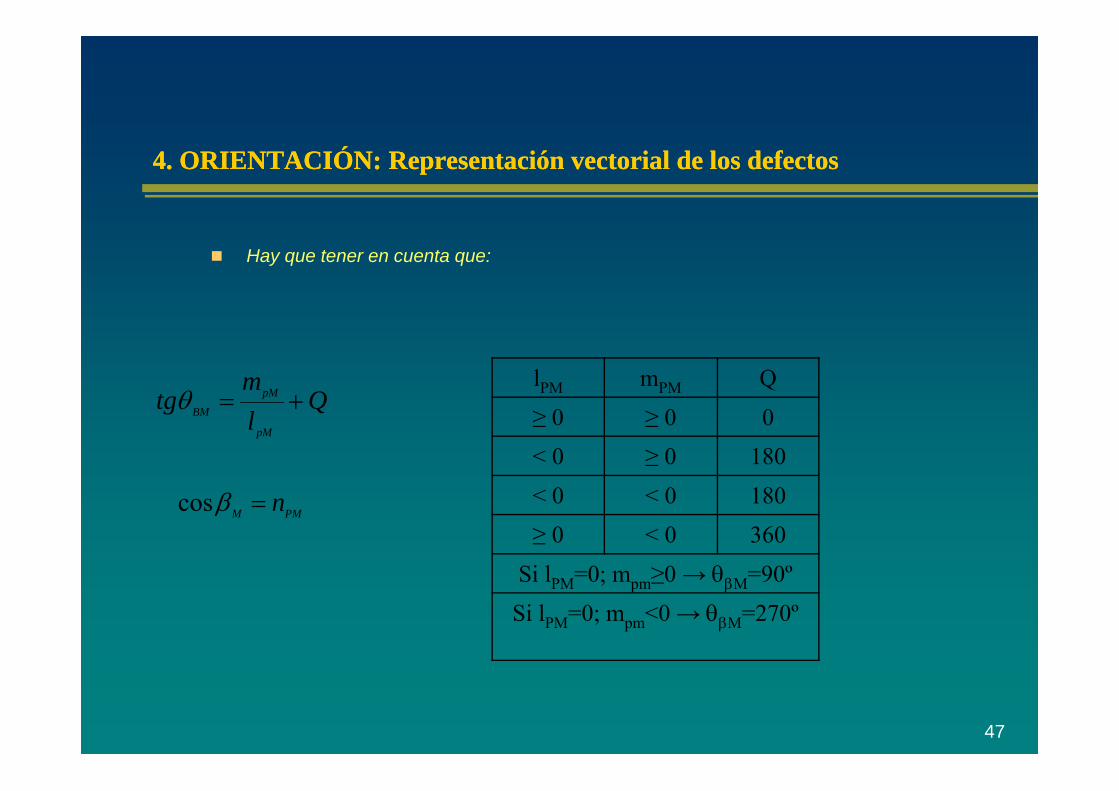
Hay que tener en cuenta que:
Qlm
tgpM
pMBM +=θ
PMM n=βcos
lPM mPM Q≥ 0 ≥ 0 0< 0 ≥ 0 180< 0 < 0 180≥ 0 < 0 360
Si lPM=0; mpm≥0 → θβM=90ºSi lPM=0; mpm<0 → θβM=270º
48
4. ORIENTACIÓN: Representación vectorial de los defectos4. ORIENTACIÓN: Representación vectorial de los defectos
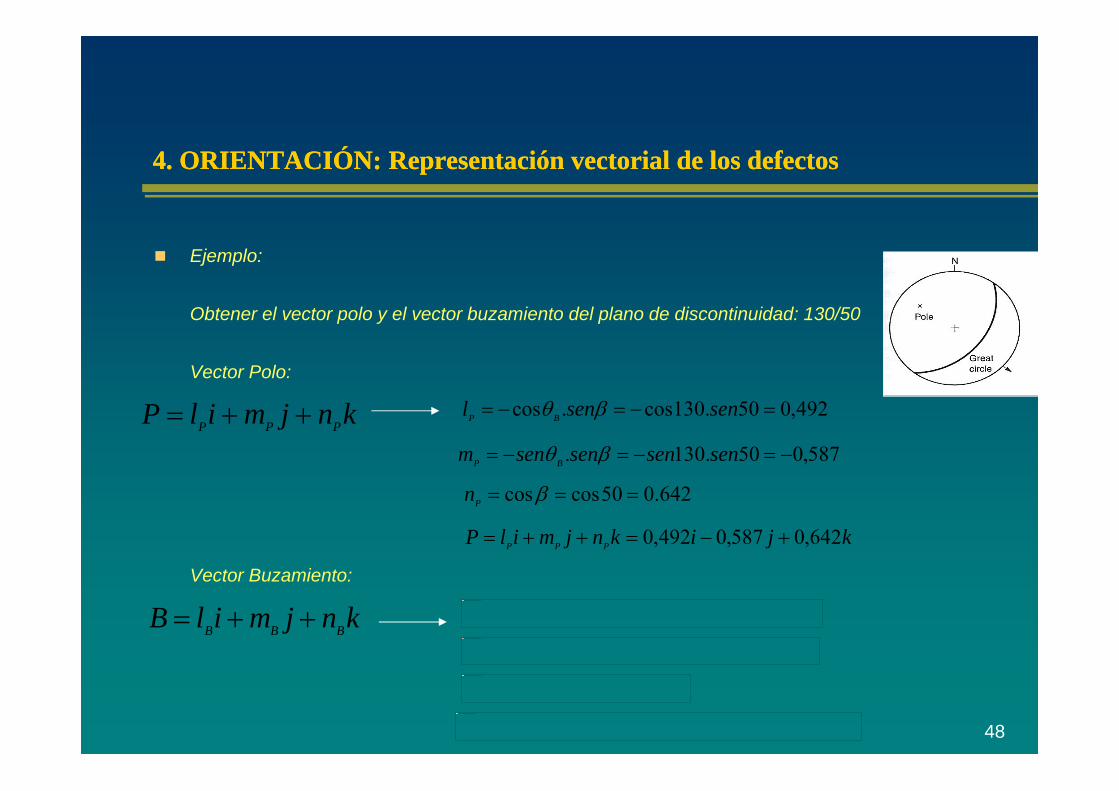
Ejemplo:
Obtener el vector polo y el vector buzamiento del plano de discontinuidad: 130/50
Vector Polo:
Vector Buzamiento:
knjmilB BBB ++=
492,050.130cos.cos =−=−= sensenl BP βθ
587,050.130. −=−=−= sensensensenm BP βθ
642.050coscos === βPn
kjiknjmilP PPP 642,0587,0492,0 +−=++=
knjmilP PPP ++=
No se puede mostrar la imagen en este momento.
No se puede mostrar la imagen en este momento.
No se puede mostrar la imagen en este momento.
No se puede mostrar la imagen en este momento.
49
4. ORIENTACIÓN: Representación vectorial de los defectos4. ORIENTACIÓN: Representación vectorial de los defectos
Es interesante determinar la distancia esférica entre dos polos.
Esta se obtiene a través de su producto escalar:
21212121 ...cos. pppppp nnmmllPP ++== ψ
12122121 cos.cos)cos(..cos. ββθθββψ +−== BBsensenPP
50
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
Los macizos rocosos siempre están fracturados.
Las fracturas se encuentran agrupadas alrededor de orientaciones más o menos preferenciales. Esto se aprecia muy bien mediante la representación polar de los defectos.
Goodman (1989) distingue, en relación a la distribución de polos, dos tipos de familias que llamaremos “focal” y “en banda”.
51
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
– Tipo “focal”: existe una orientación preferencial. Los polos se distribuyen con simetría axial alrededor de la orientación preferencial (PMD).
Esta distribución surge cuando en la génesis de la familia sólo actúa una causa fundamental, única, de tipo axial, por ejemplo un empuje tectónico.
– Tipo “en banda”: los polos se distribuyen aproximadamente sobre un segmento de arco máximo.
Esta distribución es debida a más de una causa, por ejemplo, sobre este empuje tectónico se produce un plegamiento que hace girar los planos de los defectos.
52
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
Distribución focal: Función de densidad:
a) Distribución de Fisher:
Para el análisis de la distribución de tipo focal de las orientaciones de los defectos de una familia es aplicable su asimilación a la distribución normal hemiesférica de densidad propuesta por Fisher (1953):
U: es la función de densidad de Fisher.
ψ: es el ángulo que forma un polo con la orientación del polo medio (ψ es la variable de la población de polos).
K: parámetro de quien depende la dispersión de la distribución.
( )( )kk
keek
ekU −−−
−−
+−= )cos1.
.2.
).1(11 ψ
π
53
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
Distribución focal: Función de densidad
a) Distribución de Fisher:
Se define la función f(k):
Se tiene que para ; y
Luego cuando k tiende a infinito se obtiene la función de Fisher simplificada:
Como toda función de densidad, la función U debe de verificar:
Cuando el error que produce la función de Fisher simplificada en la integral de probabilidad anterior es inferior al 1%.
No se puede mostrar la imagen en este momento.
No se puede mostrar la imagen en este momento.
0→−ke 1)( →kf
( )( ))cos1.
.2ψ
π−−= kekU
∫ =2/
0
1..2π
ψψπ dsenU
5≥k
54
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
Distribución focal: Función de densidad
b) Dispersión:
La función de Fisher simplificada:
puede escribirse en la forma:
para ángulos ψ pequeños:
luego con
Lo que indica que la distribución de Fisher en la esfera coincide con la distribución normal en el plano en las cercanías del polo medio (PMD), con como desviación estándar σ.
( )( ))cos1.
.2ψ
π−−= kekU
2..2 2
..2
),(ψ
πψ
senkekkU
−
=
2
2
2)1(
.21
2
2.
.)1(
1..21.
.2),( k
k
e
k
ekkUψ
ψ
ππψ
−−
==
2
2.
21
2.1.
.21),( σ
ψ
σπψ
−
= ekUk
1=σ
k1
=σ
55
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
Distribución focal: Función de probabilidad
La probabilidad de que un polo esté a una distancia angular al polo medio P;, ψ, igual o inferior a un polo dado ψo es:
en donde J es el jacobiano:
y Ω el dominio de integración y definido por:
luego
Para la función de probabilidad se puede aproximar por:
∫∫Ω
=< θψθψψψψ ddJkUp o .).,().,()(
)1).((..2
.),( cos. −=−
ψ
πψ k
k
ekfekkU
ψθψ senJ =),(
oψψπθ ≤≤≤≤ 0;20No se puede mostrar la imagen en este momento.
5≥k )cos1.(1)( oko eP ψψψ −−−=≤
56
4. ORIENTACIÓN: Distribución de polos4. ORIENTACIÓN: Distribución de polos
Distribución focal: Función de probabilidad
Se puede determinar el valor de K a través de la relación entre el módulo de la resultante de todos los polos Pi y el número total de polos N.
En donde ni es el número de polos de distancia angular ψi.
Para k grande (k>5),
Teoría referente a la Distribución en banda se encuentra recogida en el libro de Mecánica de las Rocas de Alcibíades Serrano.
R
∫ −+==Δ∑
=∑
= −2
0
)1.(11.cos.cos.cos.π
ψψψ kiiiiPM ek
dpN
PNN
nN
R
0→− keNR
k−=11