-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
1/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
iu khin phn b mmen ng c t tr thay ic c tnh in cm phi tuyn
mnh
Torque Distribution Control of Switched Reluctance Motors
With High Non-Linear Inductance Characteristics
Nguyn Bo Huy v T Cao MinhTrung tm Nghin cu ng dng v Sng to Cng
ngh, Trng H Bch Khoa HN
e-Mail:[email protected]
Tm ttng c t tr thay i (SRM) c mt nhc imquan trng l nhp nh mmen
ln, c bit l trongqu trnh chuyn pha dn. khc phc nhc imny, nhiu phng
php iu khin mmen cnghin cu, trong cc phng php iu khintheo cc hm phn
b mmen (TDF) c bit nnhiu nht. Tuy vy, i vi nhng ng c c tnhcht phi
tuyn mnh, phng php TDF vn bc lmt s nhc im. Trong bi bo ny, cc tc
gi
phn tch nhng hn ch ca cc phng php TDFkhi s dng iu khin ng c SRM
c c tnhin cm phi tuyn mnh. T nhng phn tch , cctc gi xut phng php ci
tin. Cc kt qu m
phng trn Matlab/Simulink chng minh c tnhng n ca phng php
xut.
Abstract
Switched Reluctance Motors (SRMs) have animportant drawback:
very big torque ripple, especially
in commutation intervals. To overcome this problem,
several torque control methods have been
investigated, of which the Torque Distribution
Function (TDF) based techniques have been far the
most well-known ones. However, for the motors with
strong non-linear characteristics, TDF methods still
have some problems. This paper provides an analysis
of drawbacks of TDF methods while controlling a
motor with strong non-linear inductance. An
improvement solution is next proposed. Thesimulation results
confirm the validity of the proposed
technique..
Ch vit ttSRM Switched Reluctance Motor
TDF Torque Distribution Function
1. Gii thiung c t tr thay i c cu trc n gin, chcchn, bn vng v mt
c kh, cho php thit k ditc cao, kh nng sinh mmen ln. Mch t ngc lm
victrong c vng tuyn tnh v vng bo haca ng c tnh t ha B-H, do s dng
cti a kh nng ca vt liu st t, t l cng sut trn khi lng ln. Nhng u im
ny m ra kh nngng dng ln cho SRM.
H. 1ng c t tr thay i loi 8-6.Tuy nhin, bn cnh nhng u im, SRM c
rtnhiu nhc im cn khc phc. ng c c cu trccc t li, mch t hot ng trong
c vng tuyn tnh
v vng bo ha nn tnh phi tuyn rt cao, c tnhphi tuyn ny li kh biu
din chnh xc di dngcc phng trnh gii tch m thng di dng cc
bng s liu c c qua phn tch phn t hu hnhoc t thc nghim. Nhng c im
trn khinSRM tr thnh i tng kh iu khin, c bit viyu cu cht lng cao. Mt
trong nhng vn cquan tm chnh trong vic iu khin SRM l nhpnh mmen sinh
ra ch yu trong qu trnh chuyn
pha dn. Trong nhng phng php iu khin gimthiu nhp nh mmen cho n
nay, lp cc phng
php dng hm phn b mmen (TDF) t ra c hiuqu cao,c ng dng rng ri.
Trong ti liu [1],
tc gi Krishnan tng hp nghin cu ca mnh cngcc tc gi khc a ra mt vi
dng ca phng phpTDF: phng php TDF-I a ra bi Husain, TDF-IIa ra bi
Ilic-Spong v TDF-III a ra bi Krishnan.Cc phng php TDF-I, II a ra cc
hm phn bn gin da trn dng hm cosin v m c s tnhin. Sau nhng phn tch u
v nhc im caTDF-I, II, Krishnan a ra phng php TDF-III vidng hm phn b
c tnh theo c tnh bin thinin cm ng c theo v tr rotor, b qua c tnh
boha v h cm gia cc pha. Phng php ny cnh gi l tin tin hn haiphng php
trc bin mang thng tin v c tnh ca ng c. Sau ,
bng vic thm vo nhng thng s b sung c tnhn h cm, Krishnan pht trin
TDF-III thnh TDF-IV.
344
mailto:[email protected]:[email protected]:[email protected]:[email protected]
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
2/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
ng gp vo lp cc phng php TDF, tc gi V.L.Do [4] ci tin cc hm phn b
trong TDF-III nhm
b li lng st gim mmen sinh ra khi chuyn phadn m khng cn kho st c
tnh h cm lm phctp thm vn nh phng php TDF-IV.Mc d c nhng u im ni bt,
cc phng php
trn u c pht trin da trn gi thit v c tnhin cm ng c c l tng ha,
bin thin tuyntnh theo v tr rotor, b qua bo ha, b qua h cm;do vy,
chng ch ng dng tt cho nhng i tngtha mn gn chnh xc nhng gi thit trn.
Quakho st, chng ti nhn thy rng khi s dng iu khin cc ng c c c tnh in
cm phi tuynmnh, cc phng php TDF nu trn bc l nhcim, khng p ng tt yu
cu cht lng. Phngphp TDF-III xy dng cc hm phnb va ngin, va hiu qu v
cn i; vic thm bt cc ilng nhm bin i n cho ph hp vi c tnh cang c lm
mt i s cn i vn c, v hn na,
cng khng p ng tt khi gp cc i tng phituyn mnh.Da trn phn tch v c
tnh bin thin phi tuynca in cm ng c c c t m phng phn thu hn, bi bo
ny xut phng n x l vn t nguyn nhn gc r: hiu chnh li chnh bn thnc tnh
bin thin in cm nhm kh tc dng gynhp nh mmen. Vic tnh ton i lng hiu
chnhthc hin qua khu suy lun logic m vi u vo lsai lch mmen vi lng t
c c t vic clng mmen cc pha. Thm vo , vi thng tin
phn hit mmen c c lng, khu iu khinmmen t vng h ban u (phng php
TDF truyn
thng) c chuyn thnh vng kn, m bo tnh nnh ca h thng.
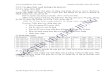
2. M hnh ha ng c SRM2.1 Thng s ng cTrong bi bo ny, mt ng c 4 pha
loi 8 -6, cngsut nh mc 1.1 kW c chn lm i tng iukhin. Mt vi thng s
ng c c cho trong BngI.
BNG I.Thng s ng c
Thng s Gi trS cc stator/rotor 8/6
Cng sut nh mc 1.1kWTc nh mc 1000 (vng/pht)
Gc cc stator/rotor 12/8 ()
Khe h khng kh 0.3mmDng in ln nht 12A
in p ngun mt chiu 300VDCVt liu st t Thp silic M19
2.2 M hnh ha ng c vi Matlab/SimulinkM hnh SRM c dn t phng trnh
cn bngin p mt pha cho nh sau:
( , )s
d iv R i
dt
(1)
Trong : v in p ngun [V]
Rs in tr dy qun [ ]
i Dng in kch thch [A] T thng mc vng [Wb]
V tr rotor [rad]
T phng trnh cn bng in p (3), vi cc d liuc c t phn tch FEM, m hnh
in mt pha caSRM c xy dng trong Matlab/Simulink nh Hnh2 vi c tnh
mmen tnh v c tnh t ha ccho trong Hnh 3.
H. 2M hnh mtpha SRM trong Matlab/Simulink.
0 10 20 30 40 50 60-60
-40
-20
0
20
40
60
Torque[Nm]
Theta [deg]
Static Torque profile
i = 0A
i = 12A
(a) c tnh mmen tnh
0 2 4 6 8 10 120
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Flux[Wb]
Current [A]
Magnetizing characteristic
Aligned (30deg)
Unaligned (0deg)
(b) c tnh tha
H. 3c tnh mmen tnh (a) v c tnh t ha (b)ca ngc.3. iu khin phn b
mmen ng c
SRM vi phng php TDF3.1 Phng php hm phn b mmen TDF
i vi cc h truyn ng in thng thng, vng
iu chnh mmen ng nht vi vng iu chnhdng in do gia mmen v dng in c
quan h t
345
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
3/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
l tuyn tnh vi hng s mmenm
K . Tuy nhin, vi
SRM, quan h ny tr thnh quan h 3 chiu T i phi tuyn, phc tp, do vy
cn thit phi c khuiu khin mmen c lp. Phng php iu khintheo cc hm phn
b mmen do Krishnan a ra[1]gi l TDF-III c kho st trong bi bo ny.
T tng chung ca phng php TDF l phn chialng t mmen Te
* theo cc hm phn b cho ccpha dn thnh Tx
* v Ty*nhm cn bng mmen tng
ti mi thi im, c bitl thi im chuyn mchgia haipha theo quan h:
* * * * *. ( ) . ( )
e x y e x e yT T T T f T f (2)
Vi ( )x
f , ( )yf l cc hm ca v tr rotor lun
phi tha mn iu kin:1x yf f (3)
Krishnan a ra phng php TDF-III vi dng hmphn b nh sau:
2
2 2
2
2 2
xx
x y
y
y
x y
gfg g
gf
g g
(4)
Trong gx v gyl bin thin in cm theo v trrotor, c tnh t d liu c c
sau phn tch phnt hu hn.
,
,
x x
x
y y
y
L ig
L ig
(5)
Dng in t mi pha c tnh nh sau:* *
*
2 2
* *
*
2 2
2 2
2 2
x x e
x
x x y
y y e
y
y x y
T g Ti
g g g
T g Ti
g g g
(6)
Biu thc (6) c dn ra t quan h c bn giammen dng in bin thin in cm
caSRM:
2 ,12
L iT i
(7)
H truyn ng SRM vi thng s ng c cho trong
Bng I. d liu phntch FEM biu din trong Hnh 3c m phng trn nn
Matlab/Simulink, tc t nh mc 1000 v/ph, khi ng vi ti 5Nm, ngti nh mc
10Nm sau 0.02s. Mmen, t thng, dngin cc pha, mmen tng v tc ng c
c
biu din trong Hnh 4 v Hnh 5.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
10
20
Phase Torque
Time [s]
Torque
[N.m]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
0.2
0.4
0.6
0.8
Phase Flux
Time [s]
Flux[Wb]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
2
4
6
8
Phase Current
Time [s]
Current[A]
Ta Tb Tc Td
Psia Psib Psic Psid
ia ib ic id
H. 4Mmen, t thng v dng in cc pha ca ng c.
346
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
4/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
5
10
15
20
25Torque respond
Time [s]
Torque
[N.m
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-500
0
500
1000
1500Speed respond
Time [s]
Speed[rpm
]
Speed
Torque ref
Torque respond
H. 5Mmen v tc ca ng c.
3.2 Phng php TDF vi ng c c c tnh in
cm phi tuyn mnhMc trn trnh by phng php TDF-III vi ccp ng mmen,
tc , dng in, t thng, kt qum phng cho thy h truyn ng t cht lng yucu.
Tuy nhin, i tng c s dng trong m
phng trn l ng c c c tnh bin thin in cmgn tuyn tnh theo v tr
rotor (c tnh phi tuyn yu).Khi p dng TDF-III cho ng c c c tnh incm
phi tuyn mnh, nhp nh mmen tr nn rt ln,khng p ng c yu cu cht lng.Kt
qu m phng trong Hnh 6 cho bi h truynng vi vng tc h, mmen t nh mc
10Nm,mmen ti khi ng v nh mc nh trn.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
5
10
15
Torque respond
Time[s]
Torque[N.m
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
200
400
600
800
1000
1200
Speed respond
Time[s]
Speed[rpm]
Torquecommand
Torquerespond
Speed
H. 6Nhp nh mmen ln vi phng php TDF-III ng dngcho ng c c c tnh in
cm phi tuyn mnh.
Nguyn nhn sinh ra nhng nhp nh mmen ln
trong trng hp ny c gii thch t biu thc tnhdng in t (6) c dn ra t
biu thc tnhmmen (7). Quan h T i g th hin trong (7) c
a ra vi gi thit c tnh bin thin in cm ltuyn tnh, mch t khng bo
ha, khng c h cmgia cc pha. Vi trng hp tng qut, mmen cnc tnh bng o
hm ca nng lng in t Wetheo v tr rotor:
eW
T
(8)
Vi ng c c ng c tnh bin thin in cmphi tuyn mnh, quan h (7) khng
cn ng na,dng in t c tnh t (6) s khng to ra mmenp ng theo yu cu. Hnh
7 biu din ng ctnh bin thin in cm theo v tr rotor c c t
phn tch FEM, c tnh ny c dc kh ln t vtrlch trc ti v tr ng trc.nh
hng ca c tnh phi tuyn ti nhp nhmmen c th thy c qua Hnh 9. Hm phn
bmmen TDF vn m bo cn bng tng mmen tcho cc pha, nhng do ng c tnh i
lng g cchiu dc xung, dng in t tnh t (6) s c chiudc ln do quan h t l
nghch, t dn ti mment cho mi pha c hng dc ln tng ng. Khimmen cc pha
khng p ng ng dng yu cunh hm phnb TDF, mmen tng c dng xungnhp nh ln
nh Hnh 6.
347
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
5/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
0 10 20 30 40 50 60-1.5
-1
-0.5
0
0.5
1
1.5
d
L/dTheta
Theta [deg]
dL/dTheta
(a) Biu din dng 2D. (b) Biu din dng 3D.
H. 7c tnh bin thin phi tuyn ca in cm theo v tr rotor v dng
in.Phng php TDF-III ni ring v cc phng phpTDF ni chung u tnh ton dng
in t theo cngthc (6), v do u b chi phi bi quan h (7). Khii tng tr
ln phi tuyn mnh, quan h (7) mt dn
chnh xc, p ng mmen tng dn nhp nh,cht lng gim st. Phng n gii quyt
vn ara trong bi bo ny c trnh by trong mc IV.
SRM AND INTEGRATED CONVERTER
LoadPWM
Current
Controller
Current
Controller
Current
Controller
*
ai
*
bi
*
ci
ai cibi
TORQUE
DISTRIBUTION
CONTROLLER
WITH FUZZY
BASED
ADJUSTMENT
MECHANISM
Position
sensorsTorque
command
*T
*
av
*
bv
*
cv
Rotor position
Current
Controller
*
di
*
dv
di
ai cibi di
H. 8Cu trc h truyn ng SRM.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
0.5
1
Torque Distribution Function
Time [s]
TDF
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-2
-1
0
1
2
dL/dTheta
Time [s]
dL/dTheta
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
2
4
6
8
Phase Current
Time [s]
Current[A]
fa fb fc fd
ga gb gc gd
ia ib ic id
(a) Vi c tnh gc dc xung, dng in t l nghch vi gb dc ln
348
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
6/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
5
10
15
20
Phase Torque
Time [s]
Torque[N.m
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
0.2
0.4
0.6
0.8
Phase Flux
Time [s]
Flux[Wb]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
2
4
6
8
Phase Current
Time [s]
Current[A]
Ta Tb Tc Td
Psia Psib Psic Psid
ia ib ic id
(b) Mmen sinh ra c dc tng ng nh dng in
H. 9nh hng ca dc ng c tnh g khin mmen cc pha khng p ng ng dng hm
phn b TDF.4. Hiu chnh c tnh bin thin
in cm bng khu logic mT nhn nh nhp nh mmen sinh ra do dc cang c
tnh bin thin in cm, chng ti xut
phng n iu chnh trc tip ng c tnh nybng cchb sung vo i lng g mt
lng hiuchnh Delta g. Do c tnh ca g c tnh phi tuyncao, ta khng th
tnh chnh xc Delta g, trong trnghp ny, mt khu hiu chnh trn c s tnh
tontheo logic m l s la chn ph hp.
Integrator
Fuzzy
Inference
System
Torque
Estimation
Tefa X
-
Delta T
Delta Ga
G function
Calculation
Equ. (8)
Ga
+
+
Ga
Fuzzy based
Adjustment
Mechanism
+
Theta_a
ia
H. 10 Khu hiu chnh.
Khu hiu chnh m c thit k theo m hnhTakagi-Sugeno vi u vo l sai
lch gia mment theo hm phn b TDF v mmen p ng c
c lng ca tng pha; u ra qua khu tch phn llng hiu chnhDelta g. Ch
vi mt u vo v mt
u ra, khu hiu chnh m c thit k ht sc ngin nhng em li hiu qu ci
thin cht lng.Khu hiu chnh c cho trn Hnh 10 v lut mc biu din nh Hnh
11.
-0.3 -0.2 -0.1 0 0.1 0.2 0.3-800
-600
-400
-200
0
200
400
600
800
DeltaT
DeltaG
Takagi-Sugeno Fuzzy Adjustment Mechanism Rule Surface
Rulesurface
H. 11 Lut ca khu hiu chnh m
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
5
10
15
Torque respond with TDF
Time[s]
Torque[N.m
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
5
10
15
Torque respond with TDF and Fuzzy adjust mechanism
Time[s]
Torque[N.m
]
Torquecommand
Torquerespond
Torquecommand
Torquerespond
H. 12 Mmen p ng trc v sau khi hiu chnh m
Sau khi c hiu chnh, ng c tnh bin thinin cm tr nn bng phng hn,
nhp nh mmenc gim thiu, so snh mmen trc v sau hiuchnh Hnh 12. Hnh
13biu din p ng mmenv tc vng kn.
349
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
7/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
0.5
1
Torque Distribution Function
Time [s]
TDF
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-2
-1
0
1
2
dL/dTheta
Time [s]
dL/dTheta
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
2
4
6
8
Phase Current
Time [s]
Current[A]
fa fb fc fd
ga gb gc gd
ia ib ic id
(a)
Hm phn b mmen, bin thin in cm gv dng in cc pha
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
10
20
Phase Torque
Time [s]
Torque[N.m
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
0.2
0.4
0.6
0.8
Phase Flux
Time [s]
Flux[Wb]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
2
4
6
8Phase Current
Time [s]
Current[A]
Phase A Phase B Phase C Phase D
Phase A Phase B Phase C Phase D
Phase A Phase B Phase C Phase D
(b) Dng in, t thng v mmen cc pha
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
5
10
15
20
25
Torque respond
Time [s]
Torque[N.m
]
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
200
400
600
800
1000
Speed respond
Time [s]
Speed[rpm]
Torque command
Torque respond
Speed
(c) p ng mmen v tc ng c
H. 13 Kt qu m phng h truyn ng SRM vi phngphp TDF c hiu chnhc tnh
bin thin in cm g.
350
-
7/31/2019 iu khin phn b mmen ng c t tr thay i c c tnh in cm phi
tuyn mnh
8/8
Hi ngh ton quc v iu khin v T ng ho - VCCA-2011
VCCA-2011
5. Kt lunBi bo trnh by phn tch phn t hu hn, mhnh ha SRM, kho st
v a ra nhn nh v shn ch gy nhp nh mmen ln ca phng phpTDF truyn thng
khi ng dng iu khin cc ngc c c tnh in cm phi tuyn cao. Cc tc gi
xut phng n gim thiu nhp nh mmen bngvic hiu chnh trc tip online
ng c tnh binthin in cm.c kho st vi phng php TDF-III, tuy vy, phng n
trn c th c p dng ci tin tt c cc phng php TDF. Cc kt qu m
phng vi ch vng tc h, vng tc kn, itng l ng c c c tnh bin thin in
cmtuyn tnh, phi tuyn chng minh tnh ng n vhiu qu ca phng n xut.
Ti liu tham kho[1] R. Krishnan, Switched Reluctance Motor
Drives,
CRC Press LLC, 2001.
[2] T.J.E. Miller, Switched Reluctance Motors andTheir Control,
Magna Physics, Oxford, 1992.
[3] Joo Pedro A. Bastos, Nelson Sadowski,Electromagnetic
Modeling by Finite Element
Methods, Marcel Dekker, 2003.
[4] V.L.Do, Minh Cao Ta, Modeling, Simulationand Control of
Reluctance Motor Drives forHigh Speed Operation, 2009 IEEE
ConversionCongress Exposition ECCE 2009, San Jose,California, USA,
Sept. 2009.
[5] Bao-Huy Nguyen, Cao-Minh Ta, FiniteElement Analysis,
Modeling and Torque
Distribution Control for Switched Reluctance
Motors with High Non-linear Inductance
Characteristics, IEEE International ElectricMachines and Drives
Conference (IEMDC
2011), Niagara Falls, Canada, May 2011, pp.
703-708.
Nguyn Bo Huy tt nghiptrng i hc Bch Khoa H Ninm 2010, chuyn ngnh
iukhin T ng ha. T thng07/2010 n nay, anh l k snghin cu ti Trung tm
Nghincu ng dng v Sng to Cngngh (CTI). Lnh vc nghin cuca anh bao gm
thit k, m hnh
ha, m phng v iu khin cc b bin i in tcng sut v truyn ng in; phn
tch trng int trong thit b in, in t bng phng php phnt hu hn; h thng
nng lng v truyn ng cho t in v nng lng ti to. Anh l ng tc gi camt bi
bo ti hi ngh quc t IEEE-IEMDC2011,hai bi bo ti hi ngh ton quc
VCCA2011 cngmt s bi ng trn tp ch T ng ha Ngy nay.
T Cao Minh tt nghip i hcti Tip Khc nm 1986, bo vlun n Tin s ti
Canada nm1997, v c 6 nm lm vic trongmi trng i hc v cngnghip Nht Bn
(1998 - 2004); ltc gi ca 12 sng ch ti NhtBn, M v 30 bi bo trn cc
tpch, tp san hi ngh quc t. Hin
nay PGS. Minh cng tc ti B mn T ng ha, HBch khoa HN v gi vai tr
Gim c Trung tm
Nghin cu ng dng v Sng to Cng ngh catrng. Hng nghin cu ca PGS.
Minh tp trungvo iu khin cc h truyn ng in, in t cngsut, cc ng dng
cho t in v nng lng mi.PGS. Minh hin l Ch tch Chi hi IEEE Vit Nam,v
c trng NTUST i Loan mi thnh gingnm 2010.
351