Embed Size (px)
Citation preview
UDK: 631.372:629.1.073
Letopis iiaucnili radovaGodina 24 (2000), broj 1-2, strana 100-115
Originalni naucni radOriginal scientific paper
DINAMICKA ANALIZA KOTRLJANJA BEZ PROKLIZAVANJATOCKOVA TRAKTORA NA NAGNUTOM TERENU
Radomirovic D., Giigori6 Radojka 1
REZIME
U radu su, dinamickom analizom ubrzanog kretanja modela traktora uznagib, odredene sve reakcije podloge koje dejstvuju na tockove u zavisnosti adubrzanja traktora, nagiba i odnosa pogonskih momenata prednjih i zadnjihtockova. Na osnovu izraza za reakcije analizirani su uticaji dinamickih i drugihparametara na postizanje rezima kotrljanja bez proklizavanja za sve tockove,kako u varijanti pogona na zadnje tockove, taka i u varijanti pogona na svacetiri tocka. U varijanti pogona na sva cetiri tocka , vazno je odredivanjenajpogodnijeg odnosa pogonskih momenata prednjih i zadnjih tockova, Zaodredivanje optimalne vrednosti tog odnosa koriscen je kriterijum jednakostirelativnih tangencijalnih sila prednjih i zadnjih tockova. U numerickimprimerima su prikazane sve relevantne funkcije i oblasti u kojima nemaproklizavanja tockova,
Kliucne reci: traktor, prevrtanje, stabilnost, kotrljanje bez proklizavanja,ubrzanje, nagib
UVOD
Za sve radove na nagnutim terenima koriste se, uglavnom, traktori op stenamene, jer je proizvodnja specijalizovanih neekonomicna. Pri tome se javljaproblem stabilnosti traktora na koji uticu mnogobrojni faktori: ugao nagibaterena, karakteristike traktora (masa, polozaj tezista, razmak osovina itd.),stanje podloge i tockova, velicina i polozaj sile otpora vazduha (dejstvo vetra,brzina kretanja, oblik) , pravac kretanja po nagibu (uzduzno, poprecno iiikombinovano), ubrzanje itd. Stabilnost kretanja traktora kao i stabilnost
1 Dr Dragi Radomirovic, docent; dr Radojka Cligoric, vanredni profesor, PoljoprivrednifakuItet, Novi Sad
100
njegovog upravljanja i stabilnost ad prevrtanja, a posebn a na nagnutimterenima, su veoma aktuelne oblasti sto Iiteratura potvrduje. U radu [1] sudefinisani ani kriterijumi za ocenu stabilnosti rada traktorskog agregata nanagnutim terenima, koji obuhvataju kompleksnost problema i brojne uticajnefaktore. U radu [2] dinamickom anaIizom kretanja modela traktora odreduje seuticaj inercijalnih faktora i uzduznog nagiba na radijalne reakcije podloge prikretanju traktora uz iIi niz nagib u najkriticnijim varijantama ubrzavanja iIikocenja, u smislu prevrtanja aka oslonih tacaka prednjih ili zadnjih tockova,
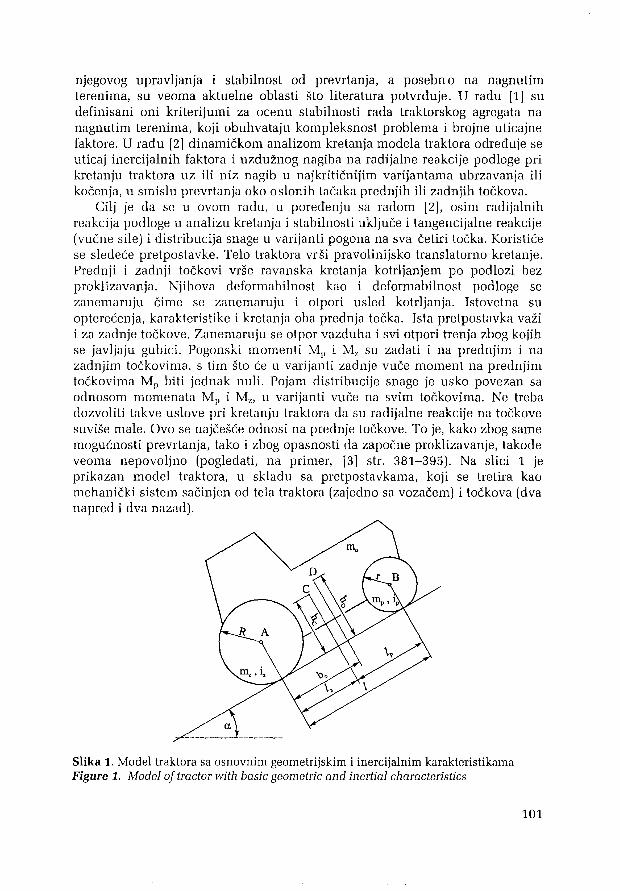
Cilj je da se u ovom radu, u poredenju sa radom [2], osim radijalnihreakcija podloge u analizu kretanja i stabilnosti ukljuce i tangencijalne reakcije(vucne sile) i distribucija snage u varijanti pogona na sva cetiri tocka. Koristicese sledece pretpostavke. Tela traktora vr si pravolinijsko translatorno kretanje.Prednji i zadnji tockovi vrse ravanska kretanja kotrljanjem po podlozi bezproklizavanja. Njihova deformabilnost kao i deformabilnost podloge sezanemaruju cime se zanemaruju i otpori usled kotrljanja. Istovetna suopterecenja, karakteristike i kretanja oba prednja tocka. Ista pretpostavka vazii za zadnje tockove. Zanemaruju se otpor vazduha i svi otpori trenja zbog kojihse javljaju gubici. Pogonski momenti M, i M, su zadati i na prednjim i nazadnjim tockovima, s tim sto ce u varijanti zadnje vuce moment na prednjimtockovima M; biti jednak nuli. Pojam distribucije snage je usko povezan saodnosom momenata M, i Mz , u varijanti vuce na svim tockovima. Ne trebadozvoliti takve uslove pri kretanju traktora da su radijalne reakcije na tockovesuvise male. Ova se najcesce odnosi na prednje tockove. To je, kako zbog samemogucnosti prevrtanja, taka i zbog opasnosti da zap acne prokIizavanje, takadeveoma nepovoljno (pogledati, na primer, [3] str. 381-395). Na slid 1 jeprikazan model traktora, u skladu sa pretpostavkama, koji se tretira kaomehanicki sistem sacinjen ad tela traktora (zajedno sa vozacern) i tockova (dvanapred i dva nazad).
Slika 1. Model traktora sa osnovnim geometrijskim i inercijalnim karakteristikamaFigure 1. Model of tractor with basic geometric and inertial characteristics
101
Koriscene oznake
m., -masa tela traktora, zajedno sa vozacernm, -mase zadnjih tockovam., -mase prednjih tockovam=mo+2mz+2mp -ukupna masa traktoraD -teziste tela traktora zajedno sa vozacernC -teziste eelineMp , M, -pogonski momenti na prednjim i zadnjim tockovima~ -odnos pogonskih momenata (~=Mp/Mz)
Fin pin Fin. .. 1 '1 l 1 l kt . t vko ,. p' z -mercija ne si e na e a ra ora 1 oe ave
M~l, M~l -inercijalni momenti prednjeg i zadnjeg tocka
a -ubrzanje traktorag -ubrzanje Zemljine tezeiz -poluprecnik inercije zadnjeg tockaip -poluprecnik inercije prednjeg tockaa -ugao nagibaR -poluprecnik zadnjeg tockar -poluprecnik prednjeg tockahe, ho, b, l-. Ip , I-karakteristicna rastojanja (slika 1)<j) -koeficijent prianjanja
Ostale oznake objasnjene su u tekstu rada ili su date na slikama.Na osnovu formula za odredivanje koordinata sredista masa sistema,
dimenzije h u i b, mogu biti odredene na osnovu sledecih formula
(1)
ODREDIVANJE POVEZANOSTI UBRZANJA TRAKTORAI POGONSKIH MOMENATA
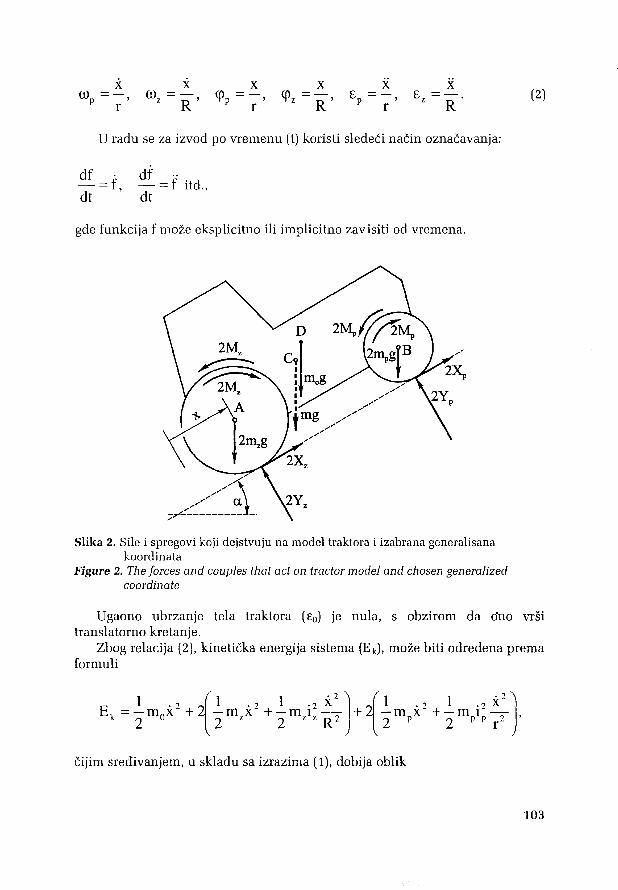
Na slici 2 je prikazano opterecenje traktora kao eeline, sacmjenog adtockova i njegovog tela, zajedno sa vozacern. Sile i mornenati koji dejstvuju namaternaticki model traktora su na istovetan nacin tretirane kao sto je loucinjeno u [4] (na pojednostavljenom primeru dinamike kretanja vozila str.261-265).
Zbog pretpostavke da se tockovi kotrljaju po podlozi bez proklizavanjasistem ima jedan stepen slobode kretanja. Za generalisanu koordinatu jeizabrana koordinata x. Poslediea toga je da je brzina tela lraktora x dok suugaone brzine prednjih i zadnjih tockova (wp, wz)' kao i njihovi uglovi rotacija(<j)p, <j)z) i ugaona ubrzanja (Ep, Ez), odredeni izrazima:
102
x<Pp =-,
r
XCz =-.
R(2)
U radu se za izvod po vremenu (t) koristi sledeci nacin oznacavanja:
df .-=fdt '
df "-=f itd.,dt
gde funkcija f maze eksplicitno ili implicitno zavisiti ad vremena.
Slika 2. Sile i spregovi koji dejstvuju na model traktora i izabrana generalisanakoordinata
Figure 2. The forces and couples that act on tractor model and chosen generalizedcoordinate
Ugaono ubrzanje tela traktora (Eo) je nula, s obzirom da dna vrsitranslatorno kretanje.
Zbog relacija (2), kineticka energija sistema [Ej], maze biti odredena premaformuli
cijim sredivanjem, u skladu sa izrazima (1), dobija oblik
103
Potencijalna energija
n =rnog sin a . x + 2mzg sin a . x + 2mpg sin a . x ,
s obzirom na (1), dobija oblik
Tl = mgsin a· x.
(3)
(4)
Pri kretanju ovog sistema virtualni rad (8A) vrse sile tezina i momenti.Virtualni rad momenata, s obzirom na (2), dobija oblik
* () 8x 8x ( 2M 2M)8A =28A(Mz)+28AM p=2Mz-+2M -= _z+_P .8x,
R P r R r
pa je generalisana nekonzerva tivna sila
(5)
(6)
(7)
Lagranzeva jednacina druge vrste
s obzirom na formule (3-5), daje sledecu vezu izmedu pogonskih momenata iubrzanja ( X =a )
2M 2M (2m i2 2m i 2 J__z +__P = mgsina+ rn+ __Z_' _z + p p .a.R r R 2 [2
Dalje, s obzirom na odnos pogonskih momenata prednjih i zadnjih tockova(~=Mp!Mz), dobija se da su momenti, u zavisnosti od ubrzanja traktora(odnosno, tela traktora) i ostalih parametara, odredeni izrazima
2m i2 2mpi2prngsina+ rn+ __Z
_Z +--- -aR 2 [2
Na osnovu izraza (7) se vidi da su pogonski momenti linearne funkcijeubrzanja traktora.
104
ODREDIVANJE REAKCIJA PODLOGE PRI UBRZANOM KRETANJUTRAKTORA UZ NAGIB
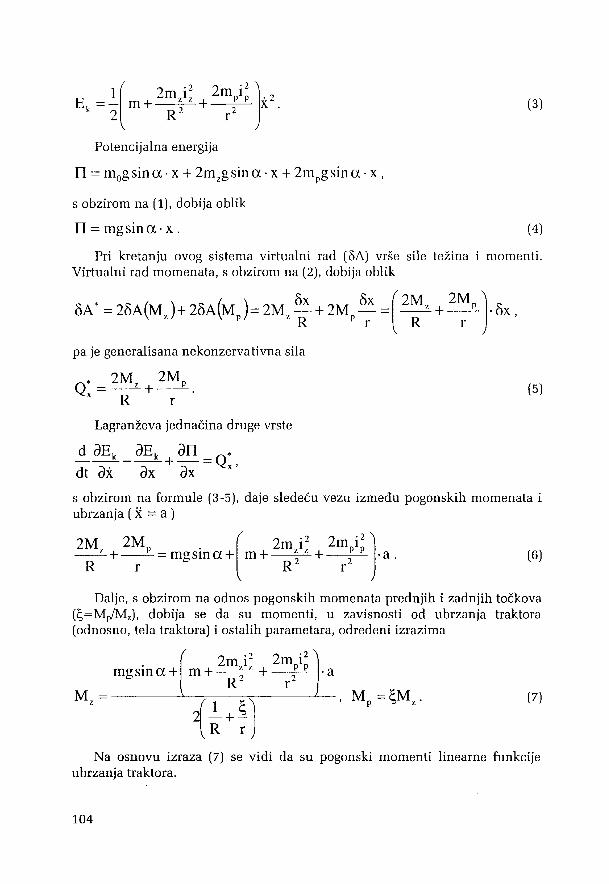
Na slici 3 su prikazane sve sile i momenti koji dejstvuju na traktor kaocelinu. Takode su prikazane i inercijalne sile i inercijalni momenti, s obziromda ce se trazene reakcije podloge odredivati Dalamberovim principom.Intenziteti ovih inercijalnih sila i inercijalnih momenata, s obzirom na relacije(2), su:
pin =m ap p , (8)
Momentni uslov ravnoteze prikazanog sistema sila i spregova (slika 3),izborom tacke P, za momentnu tacku, a s obzirom na izraze (1) i (8), odredujeradijalnu reakciju na prednji tocak u obliku
(·2 '2)lz he· he lp lzY =-mgcosa--mgsma- -m+-m +--m -a .
p 2l 2l 2l rl p Rl z(9)
Slika 3. SHe i spregovi koji dejstvuju na model traktora [ukljucujuci i inercijalne)Figure 3. The forces and couples that act on the tractor model (including inertial ones)
105

Za odredivanje radijalne reakcije na zadnji tocak (slika 3), iskoristice seizraz (9) i uslov ravnoteze
LYi =2Yp +2Yz -mgcosa =0,
na osnovu kojih je
(10)
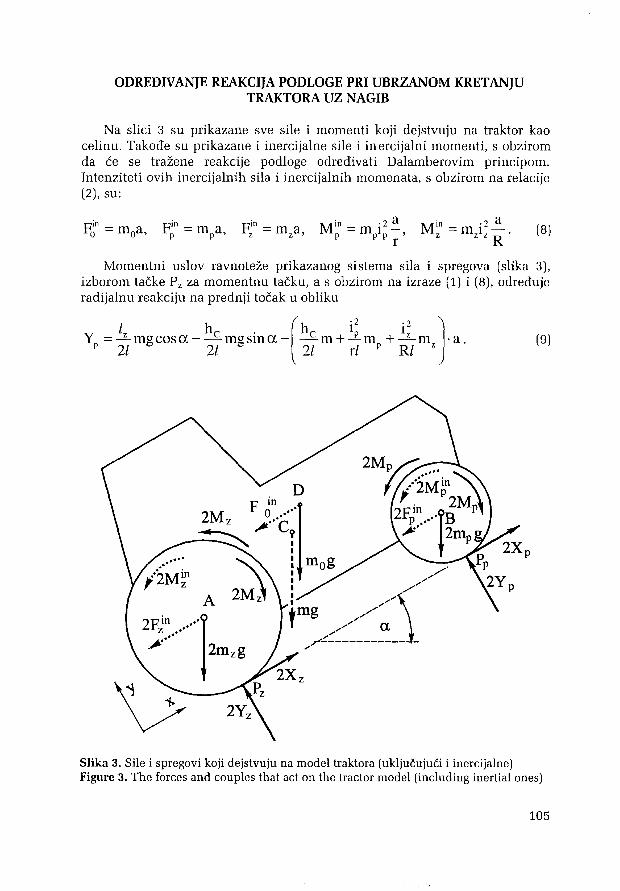
Momentni uslov ravnoteze sistema sila i spregova koji dejstvuje na prednjitocak (slika 4.a), izborom tacke B za momentnu tacku, daje jednakost
LM Bi =Xpr-Mp+M~I =0,
(11)
mgsina+
na osnovu koje je, s obzirom na jednacine (7) i (8), tangencijalna reakcija naprednji tocak odredena izrazom
2mi2 2mi2,--1.~m+--~+--P~l
( R'~ ) r' _ i~ mpa
2r -k + ~- r
a) prednji tocakfront wheel
b) zadnji tocakrear wheel
Slika 4. Sile i spregavi kaji dejstvuju na tack aveFigure 4. The forces and couples that act on the wheels
Momentni uslov ravnoteze sistema siIa i spregova koji dejstvuje na za dnjitocak (slika 4.b), izborom tacke A za momentnu tacku, daje jednakost
106

LMAi =XzR - Mz+ M~n =0,
na osnovu koje je, s obzirom na jednacine (7) i (8), tangencijalna reakcija nazadnji tocak odredena izrazom
(12)
(13)
Veoma vazan parametar za stabilno i upravljivo kretanje vozila je odnosizmedu tangencijalne reakcije na tocak [vucne sile) i odgovarajuce radijalne(normalne) reakcije. U ovom radu ce za taj odnos biti koriscen termin"relativna tangencijalna sila", mada se u literaturi (na primer, [5]) moze sresti itermin "redukovana tangencijalna sila u uzduznom pravcu". Vazno je imati naumu da je za kotrljanje bez proklizavanja bilo kojeg od tockova nephodno dataj odnos ima manju vrednost od koeficijenta prianjanja <p. Stoga je, za ovdeusvojene pretpostavke, nephodno da za vreme kretanja budu zadovoljenesledece dve nejednakosti:
x X_p <<p, _z <<poYp Yz
Zadovoljenjem prve od nejednakosti (13), postize se kotrljanje bezproklizavanja prednjih tockova, dok se zadovoljenjem druge nejednakosti,postize kotrljanje bez proklizavanja zadnjih tockova. Zbog nedostatakaizazvanih idealizacijom modela (usvojenih pretpostavki), te promenljivostimnogih parametara pri kretanju i poremecaja koji se pri kretanju javljaju,teznja je da su istovremeno i Xp/Yp i Xfiz nizih vrednosti od koeficijentaprianjanja rp. Sa zeljom da se analiza izvrsi smatranjem da su ubrzanje a, nagiba i odnos pogonskih momenata ~ promenljive velicine, odredene reakcije (912) su funkcije dve ili tri promenljive velicine, dakle
NUMERICKI PRIKAZ I ANALIZA REZULTATA ISTRAZIVANJAU VARIJANTAMA ZADNJE VUCE ~=O) I VUCE
NA SVA CETIRI TOCKA ZA~=O.5
Kao primer odredivanja oblasti kretanja u kojoj se tockovi kotrljaju bezproklizavanja analiziran je traktor IMT-549 sa podacima: m = 2935 kg,m, = 104 kg, m, = 73 kg, R = 590 mm, r = 525 mm, iz = 354 mm, ip =315 mm,
107
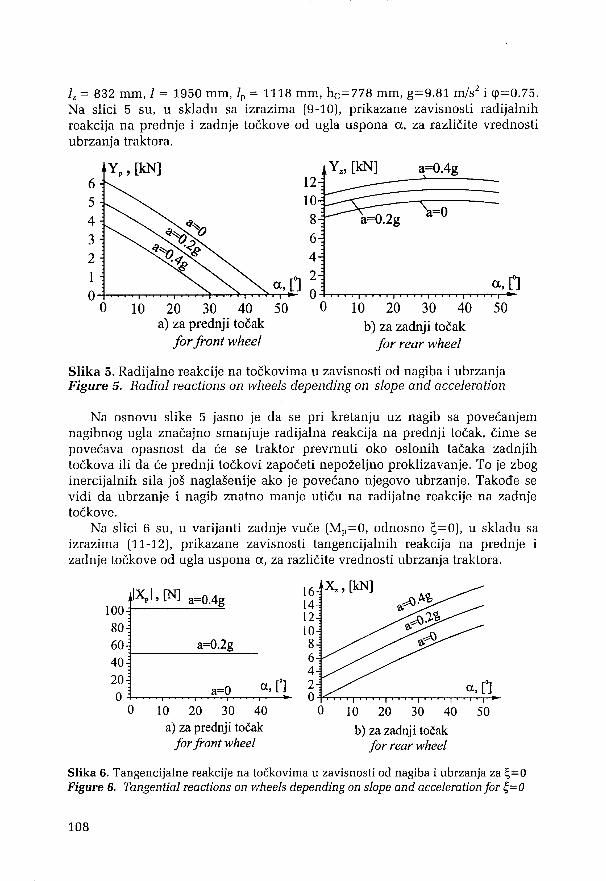
lz = 832 mm, 1 = 1950 mm, lp = 1118 mm, hc=778 mm, g=9.81 m/s 2 i <p=0.75.
Na slici 5 su, u skladu sa izrazima (9-10), prikazane zavisnosti radijalnihreakcija na prednje i zadnje tockove od ugla uspona o, za razlicite vrednostiubrzanja traktora.
a=OAg
c, rJ5010 20 30 40
b) za zadnji tocakfor rear wheel
6 125 104 83 62 4
1 o, rJ 2o-h-...........,........,.......-T.........,....,....,,.....,.,.............-hr""T'""'T".................. 0 +rT"""T""'1r-T""T..........T""T""'1"""T""T'""'T""T"""r-T""T"""T""T""'T""T"""r-T""T--
o 10 20 30 40 50 0a) za prednji tocak
for front wheel
Slika 5. Radijalne reakcije na tockovima u zavisnosti od nagiba i ubrzanjaFigure 5. Radial reactions on wheels depending on slope and acceleration
Na osnovu slike 5 jasno je da se pri kretanju uz nagib sa povecanjemnagibnog ugla znacajno smanjuje radijalna reakcija na prednji tocak, cime sepovecava opasnost da ce se traktor prevrnuti oko oslonih tacaka zadnjihtockova iii da ce prednji tockovi zapoceti nepozeljno proklizavanje. To je zboginercijalnih sila jos naglasenije ako je povecano njegovo ubrzanje. Takode sevidi da ubrzanje i nagib znatno manje uticu na radijalne reakcije na zadnjetockove,
Na slici 6 su, u varijanti zadnje vuce (Mp=O, odnosno ~=O), u skladu saizrazima (11-12), prikazane zavisnosti tangencijalnih reakcija na prednje izadnje tockove od ugla uspona «, za razlicite vrednosti ubrzanja traktora.
10 20 30 40
a) za prednji tocakfor front wheel
«n5010 20 30 40
b) za zadnji tocakfor rear wheel
161412
1086420-+"'r-"T""T"""1'""T""T"'T""T'"T""T""''''''-'-"'T""T'""r-r-r,...,..-"T""T""''1'""T""T__
oa,C]a=O
a=0.2g
I~I, [N] a=OAg100.1------=
8060~-------=--
40
200+-,-,.....,...,..,..,....,..,...,,..,..,....-:;.......;:-....,...,............---.-
o
Slika 6. Tangencijalne reakcije na tockovima u zavisnosti od nagiba i ubrzanja za ~=OFigure 6. Tangential reactions on wheels depending on slope and acceleration for ~= 0
108

Slika 6.a jasno potvrduje poznate cinjenice da su, u varijanti zadnje vuce,tangencijalne sile na prednjim tockovima prakticno zanemarljive. S lika 6.bpokazuje u kojoj meri se, u tom slucaju, povecavaju tangencijalne sile nazadnje tockove sa povecavanjem vrednosti ugla uspona ili ubrzanja.
Na slici 7 su, u jednoj varijanti pogona na sva cetiri tocka (M p:Mz = 1:2,odnosno ~=0.5), u skladu sa izrazima (11-12), prikazane zavisnostitangencijalnih reakcija na prednje i zadnje tockove od ugla uspona a, zarazlicite vrednosti ubrzanja traktora.
6x,, [kN] x., [kN]
510
4 8
3 6
2 4
1 c, [0] 2c, [0]
0 00 10 20 30 40 50 0 10 20 30 40 50
a) za prednji tocak b) za zadnji tocakfor front wheel for rear wheel
Slika 7. Tangencijalne reakcije na tockovima u zavisnosti ad nagiba i ubrzanja za ~=O.5
Figure 7. Tangential reactions on wheels depending on slope and acceleration for ~= 0.5
Za razliku od prethodnog slucaja (zadnja vuca, ~=O), slika 7 pokazuje ukojoj meri se, u slucaju vuce na sva cetiri tocka, za vrednost ~>O, povecavajutangencijalne sile na prednje tockove a u kojoj meri na zadnje, sapovecavanjem vrednosti ugla uspona Hi ubrzanja.
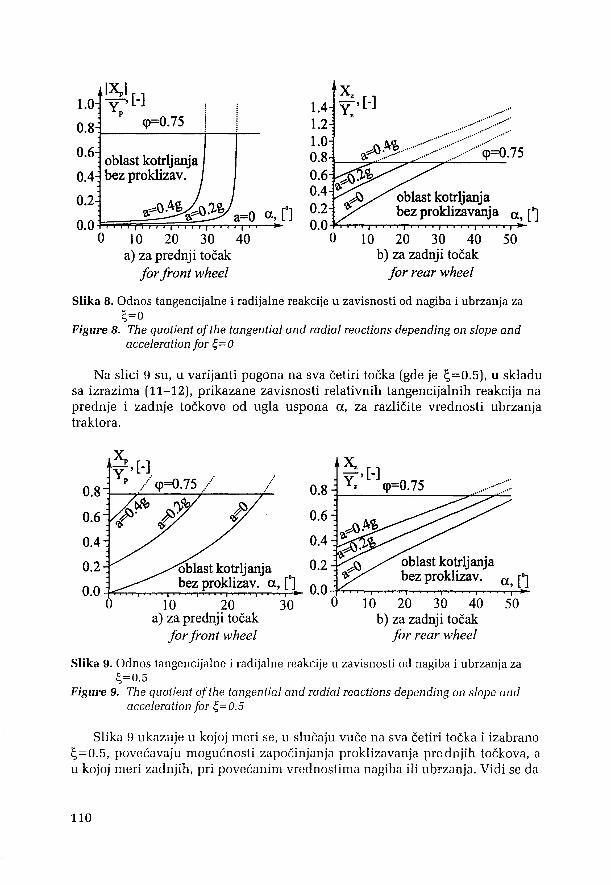
Na slici 8 su, u varijanti zadnje vuce, u skladu sa izrazima (11-12),prikazane zavisnosti relativnih tangencijalnih reakcija na prednje i zadnjetockove od ugla uspona a, za razlicite vrednosti ubrzanja traktora.
Uporedujici slike 6.a i 8.a lako se zakljucuje da, u slucaju zadnje vuce,prednji tockovi prakticno nece ni proklizavati. Zbog toga ce postojati opasnostod prevrtanja traktora oko oslonih tacaka zadnjih tockova bez p rethodnogupozorenja manifestovanog proklizavanjem prednjih tockova, Slika 8.bukazuje u kojoj meri se, u slucaju zadnje vuce, povecava mogucnostzapocinjanja proklizavanja zadnjih tockova pri povecanim vrednostima nagibaiIi ubrzanja.
109
oblast kotrljanjabez proklizavanja (l, [J
10 20 30 40 50b) za zadnji tocak
for rear wheel
1.41.21.00.8 :I--~"""'::----:;"""'::----:;"'::""_~_
0.60.40.20.0
o
I~t [_]Yp
<p=0.751.0
0.81-- --;_-+_
0.6 oblast kotrljanja0.4 bez proklizav.
0.2
0.0o
Slika 8. Odnas tangencijalne i radijalne reakcije u zavisnasti ad nagiba i ubrzanja za~=O
Figure 8. The quotient of the tangential and radial reactions depending on slope andacceleration for ~=o
Na slici 9 SU, u varijanti pogona na sva cetiri tocka (gde je ~=0.5), u skladusa izrazima (11-12), prikazane zavisnosti relativnih tangencijalnih reakcija naprednje i zadnje tockove od ugla uspona ex, za razlicite vrednosti ubrzanjatraktora.
->:
oblast kotrljanjabez proklizav. c, n
10 20 30 40 50b) za zadnji tocak
for rear wheel
x,-,[-]v; <p=0.75...........
oblast kotrljanjabez proklizav. c, [0]
10 20 30a) za prednji tocak
for front wheel
Slika 9. Odnos tangencijalne i radijalne reakcije u zavisnosti od nagiba i ubrzanja za~=O.5
Figure 9. The quotient of the tangential and radial reactions depending on slope andacceleration for ~= 0.5
Slika 9 ukazuje u kojoj meri se, u slucaju vuce na sva cetiri tocka i izabrano~=0.5, povecavaju mogucnosti zapocinjanja proklizavanja pre dnjih tockova, au kojoj meri zadnjih, pri povecanirn vrednostima nagiba ili ubrzanja. Vidi se da
110

su za ~=0.5, po pitanju proklizavanja kriticni, prednji tockovi. Dakle, izabranavrednost za ~ je prevelika i trebalo bi ici na njeno smanjenje.
Na slikama 10 i 11 su prikazane oblasti u ubrzanje-nagib ravni u kojima suzadovoljeni uslovi neproklizavanja tockova (nejednakosti (13)), u razrnatranimvarijantama zadnjeg pogona ili pogona na sva cetiri tocka, za zadat koeficijentprianjanja <po Sa slika 10 i 11 se jos jasnije vidi u kojoj meri je koeficijent ~
uticajan na vaznu oblast neproklizavanja prednjih (odnosno, zadnjih) tockova,Prikazane krive koje II lim ubrzanja-nagib ravnima ogranicavaju oblastineproklizavanja, odredene su zamenom znakova nejednakosti izraz a (13)znacima jednakosti.
alg, [-] alg, [-]0.4 0.4
0.3 0.3
0.2 0.2oblast kotrljanja
0.1 bez proklizavanja 0.1
a, r] 0.0a, r]
0.00 10 20 30 40 50 0 10 20 30 40
a) za prednji tocak b) za zadnji tocakfor front wheel for rear wheel
Slika 10. Oblasti u ubrzanje-nagib ravni u kojima se tockovi traktora kotrljaju bez proklizavanja za ~=O
Figure 10. The areas on the acceleration-slope plane where tractor wheels rolling withno slipping for ~= 0
a/g, [-] a/g, [-]0.4 0.4
0.3 0.3
0.2 0.2oblast kotrljanjabez proklizavanja
0.1 0.1
0.0 c, n0.0
c, [0]
0 10 20 30 0 10 20 30 40 50a) za prednji tocak b) za zadnji tocak
for front wheel for rear wheel
Slika 11. Oblasti u ubrzanje-nagib ravni u kojoj se tockovi traktora kotrljaju bez proklizavanja za ~=O.5
Figure 11. The areas on the acceleration-slope plane where tractor wheels rolling withno slipping for ~= O. 5
111

OPTIMALNA DISTRIBUCIJA SNAGE KOD POGONA NA SVA CEfIRI TOCKA
Usvojimo da je kriterijum za optimalnu distribuciju snage, kod pogona nasva cetiri tocka, takav, da relativne tangencijalne sile prednjih i zadnjihtockova, za zadate vrednosti ubrzanja i nagiba, imaju iste vrednosti. Drugimrecima, treba da se odredi odnos pogonskih momenata prednjih i zadnjihtockova (bice oznacen sa ~OPl), u zavisnosti od ubrzanja i nagiba tako da jezadovoljena jednakost (videti izraze 14)
X p (a, a, ~oPt )
Yp (a,a)
X z (a, a, ~oPt)
YJa, a)(15)
Uvrstavanjem izraza (9-12) u jednakost (15), pa resavanjem po ~()Pl> dobija se
{8{a,a).y{a,a)+ 2~m,a . lj>{a, a)]
~oPt (a, a)= [ .2 ] ,
R \jI(a, a)o<1>(a ,a)+ 2 ~z2 mza.y(a,a)
gde uvedene funkcije \jI(a, a), e(a, a), <1>(a, a) i y(a, a) imaju oblik:
. ( 2m,i2J\jI(a,a)=mgsma+ m+ R~ z -a ,
(
2m i2i8{a,a)= mgsino.-- m+ r: ' ra ,
(
2i2 2·2 )lj>{a,a)= mgV, cosa+ he sina)+ hem +-tm,+ i m, ra,
(2i2 2i2 I
y{a,a)=mg{t,cosa-hcsina)- hem+-t m, + ~ m, .:
(16)
NUMERICKI PRIMER ZA OBLASTI KOTRLJANJA BEZ PROKLIZAVANJAU VARIJANTI VUCE NA SVA CETIRI TOCKA PRIOPTIMALNOJ
DISTRIBUCIJI SNAGE
Ovde ce biti prouceno odredivanje ~()Pl za slucaj ubrzanog kretanja traktorauz nagib nagibnog ugla 15° i ubrzanja 0.2g. Proracun je i ovde uraden zatraktor IMT-549 sa podacima kiji su napred navedeni.
112
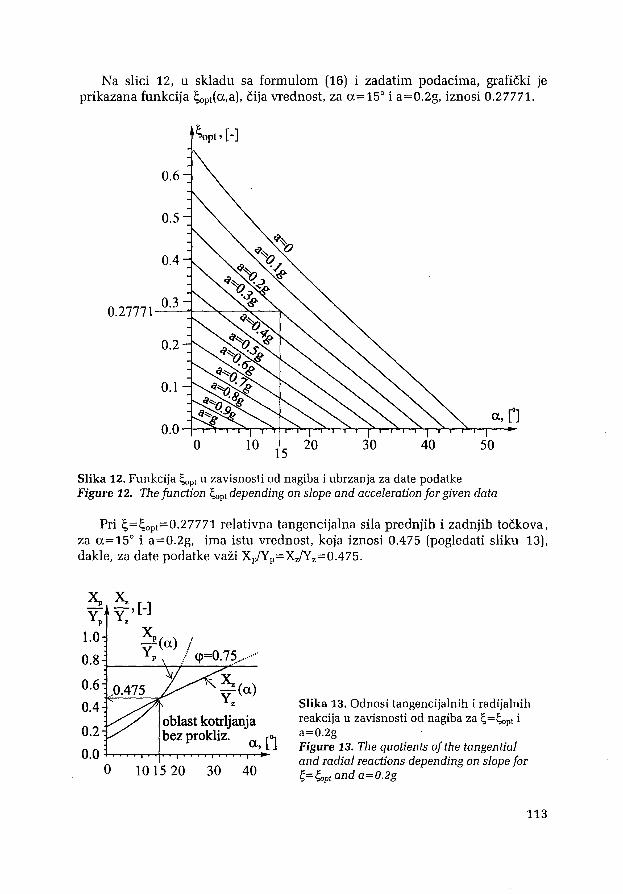
Na slici 12, u skladu sa formulom (16) i zadatim podacima, graficki jeprikazana funkcija Sopt(a,a), cija vrednost, za a=15° i a=0.2g, iznosi 0.27771.
Slika 12. Funkcija ~Pl u zavisnasti ad nagiba i ubrzanja za date podatkeFigure 12. The function ~Pl depending on slope and acceleration for given data
Pri S=Sopt=0.27771 relativna tangencijalna sila prednjih i zadnjih tockova ,za a=15° i a=0.2g, ima istu vrednost, koja iznosi 0.475 (pogledati sliku 13),dakle, za date podatke vazi Xp/Yp=Xz/Yz=0.475.
~ ~, [-]v, v;1.0 ~(a) !0.8 Yp ;, <p=0.7? ·····
0.6 ~(a)0.4 Yz
oblast kotrljanja0.2 bez prokliz. c, [J0.0 +-""'-'-'-T""T'"""f,-.-,...............-..-r-r-r-..........,"""""-
o 10 15 20 30 40
Slika 13. Odnosi tangencijalnih i radijalnihreakcija u zavisnasti ad nagiba za ~=~Pl ia=0.2gFigure 13. The quotients of the tangentialand radial reactions depending on slope for~=~pt and a=O.2g
113
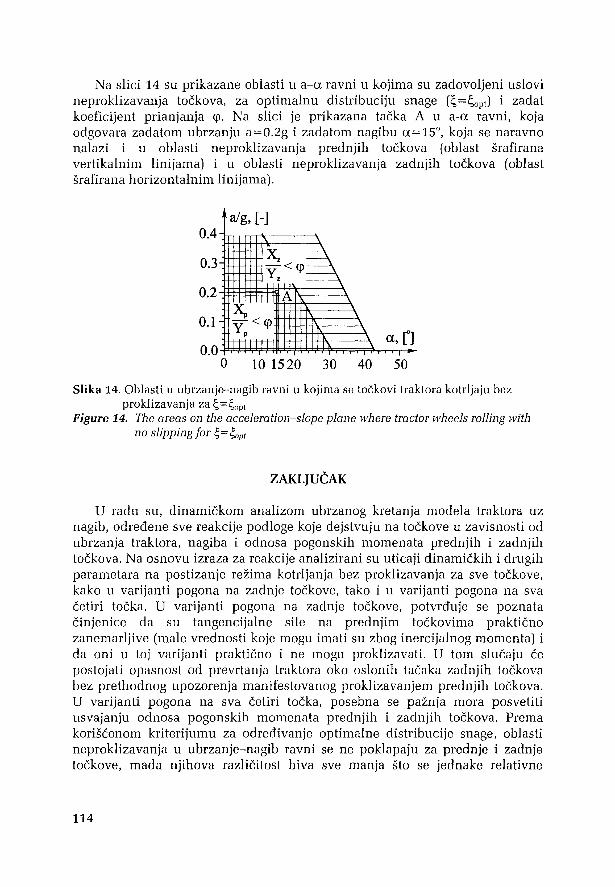
Na slici 14 su prikazane oblasti u a-a ravni u kojima su zadovoljeni uslovineproklizavanja tockova, za optimalnu distribuciju snage (~=~opd i zadatkoeficijent prianjanja <po Na slici je prikazana tacka A u a-a ravni, kojaodgovara zadatom ubrzanju a=O.2g i zadatom nagibu a=15°, koja se naravnonalazi i u oblasti neproklizavanja prednjih tockova (oblast srafiranavertikalnim linijama) i u oblasti neproklizavanja zadnjih tockova (oblastsrafirana horizontalnim linijama).
50403010 1520
alg, [-]
\
. ,~~ -
Y', < <p1 "
A \
~I\\
\-<<p 1'\ '\Yp
1'\ '\
(1, [0]~ '\'\
0.0o
0.1
0.4
0.2
0.3
Slika 14. Oblasti u ubrzanje-nagib ravni u kojima se tockovi traktora kotrljaju bezproklizavanja za ~=~OPl
Figure 14. The areas on the acceleration-slope plane where tractor wheels rolling withno slipping for ~= ~opt
ZAKLJUCAK
U radu su, dinarnickom analizom ubrzanog kretanja modela traktora uznagib, odredene sve reakcije podloge koje dejstvuju na tockove u zavisnosti odubrzanja traktora, nagiba i odnosa pogonskih momenata prednjih i zadnjihtockova. Na osnovu izraza za reakcije analizirani su uticaji dinarnickih i drugihparametara na postizanje rezirna kotrljanja bez proklizavanja za sve tockove,kako u varijanti pogona na zadnje tockove, takoi u varijanti pogona na svacetiri tocka. U varijanti pogona na zadnje tockove, potvrduje se poznatacinjenice da su tangencijalne sile na prednjim tockovima prakticnozanemarljive (male vrednosti koje mogu imati su zbog inercijalnog momenta) ida oni u toj varijanti prakticno i ne mogu proklizavati. U tom slucaju cepostojati opasnost od prevrtanja traktora oko oslonih tacaka zadnjih tockovabez prethodnog upozorenja manifestovanog proklizavanjem prednjih tockova.U varijanti pogona na sva cetir! tocka, posebna se paznja mora posvetitiusvajanju odnosa pogonskih momenata prednjih i zadnjih tockova, Premakoriscenom kriterijumu za odredivanje optimalne distribucije snage, oblastineproklizavanja u ubrzanje-nagib ravni se ne poklapaju za prednje i zadnjetockove, mada njihova razlicitost biva sve manja sto se jednake relativne
114
tangencijalne sile prednjih zadnjih tockova vise prihlizavaju koeficijentuprianjanja.
LITERATURA
1. Gligoric, R, Nikolic, R, Furman, T., Savin, L., Hristov, S.: Kriterijumi stabilnostistandardnih traktora na nagnutom zernljislu, Casopis .Traktori i pogonskc masine",Vo1.3, No.4, str.60-66, Novi Sad, 1998.
2. Radomirovic, D., Cligoric, R: Poduzna dinamicka stabilnost traktora na nagnutimterenima, Internacionalna konferencija "TEMPO 2000", 129-134, Cacak, 2000.
3. Jankovic, D., Todorovic, J.: Teorija kretanja motornih vozila, Masinski fakultet,Beograd, 1990.
4. Kojic, M.: Dinamika, Naucna knjiga, Beograd, 1985.5. Cucuz, N., Rusov, 1.: Dinamika motornih vozila, Privrcdni pregled, Beograd, 1973.6. Simic, D.: Dinamika motornih vozila-stabilnost upravljanja, Masinski fakultet,
Kragujevac, 1974.
DYNAMICAL ANALYSIS OF ROLLING WITH NO SLIPPINGOF TRACTOR WHEELS ON THE SLOPING LAND
byRadomirovi6 D., Gligori6 Radojka
SUMMARY
All reactions of a ground, which effect on wheels depending on accelerationof the tractor, slope and relations of drive torque of front and rear wheels, havebeen determined by dynamic analysis in the paper. Influences of dynamic andothers parameters on attaining rolling regime rolling with no slipping for allwheels, in variant rear-wheel drive as variant four-wheel drive, have beenanalyzed by relation of reactions. In variant four-wheel drive, determining of themost appropriate relation drive torque of front and rear wheels, is veryimportant. Criterion equality reduced tangential forces of front and rear wheelswas using for determining the optimal values of that relation. All relevantfunctions and the areas without wheel slipping have been presented innumerical examples.
Key words: tractor, overturning, stability, rolling with no slipping,acceleration, slope
Primljeno: 31.10.2000.Prihvaceno: 05.11.2000.
115